


-
摘要: 在确保固态面阵激光雷达安全性的前提下,为了提高光学系统的像面能量均匀度以及增加光学系统所接收到的能量,保证在探测过程中的低信噪比以及对目标的可探测性,本文通过对发射激光能量和接收能量进行建模,给出了光学参数,研究了影响接收光学系统像面照度的因素。指出大视场大相对孔径高照度均匀性光学系统的设计要素,并通过ZEMAX优化分析给出了具体的实施过程。最终设计了λ=905(±5)nm,焦距为15 mm,相对孔径为1/1.4,视场角为2ω=76°的激光雷达接收镜头,系统总长小于77 mm,在空间频率为20 lp/mm处MTF值大于0.5,在0.85视场内的相对畸变小于8%,像面照度不均匀性小于7.2%。满足激光雷达的探测要求。Abstract: With regards to the safety of solid-state area array lidars, in order to improve the energy uniformity of imaging plane and increase the energy received by the optical system, this paper works to ensure a low signal-to-noise ratio and the detectability of a target. The optical parameters are given by modeling the emitted and received laser energy. The factors affecting the image plane's illumination in the optical receiver are studied and the design elements of optical systems with large fields of view, large relative aperture, and high illumination uniformity are described. Through ZEMAX optimization analysis, a detailed implementation process is then provided. A lidar receiving lens with λ = 905 (±5) nm, a focal length of 15 mm, a relative aperture of 1/1.4, and a field of view 2ω = 76° was designed. The total system length was less than 77 mm, and the MTF value at the spatial frequency of 20 lp/mm was greater than 0.5. The relative distortion at the 0.85 field of view was less than 8% and the unevenness of the image plane illumination was less than 7.2%.This design meets the requirements for lidar detection.
-
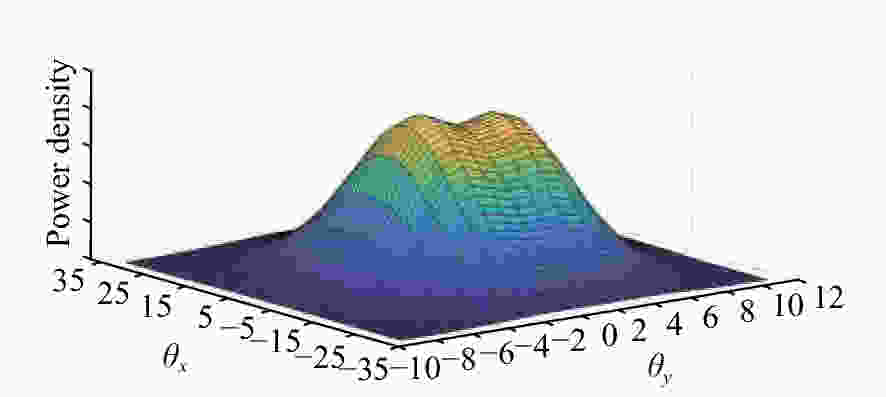
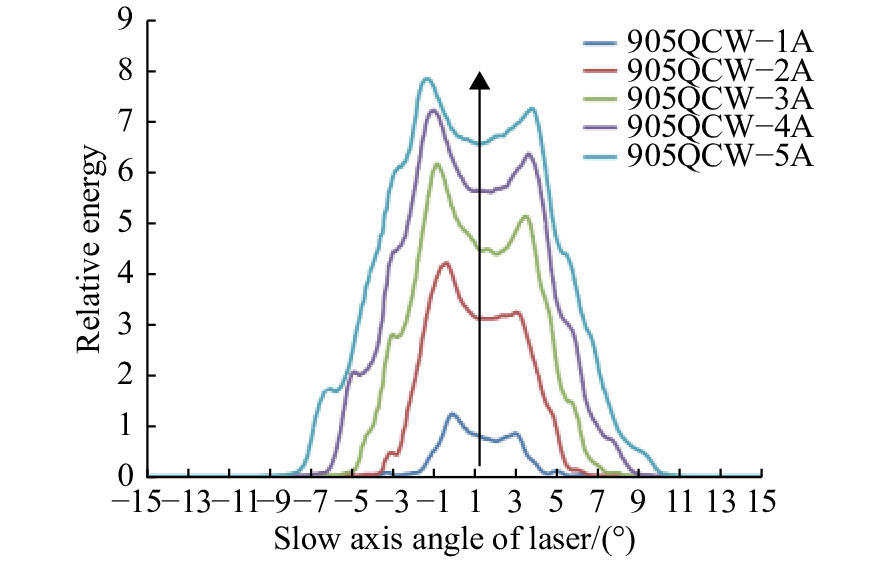
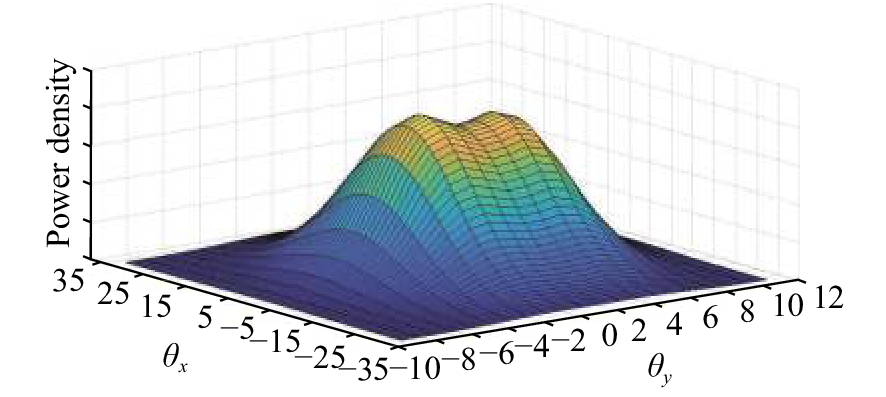
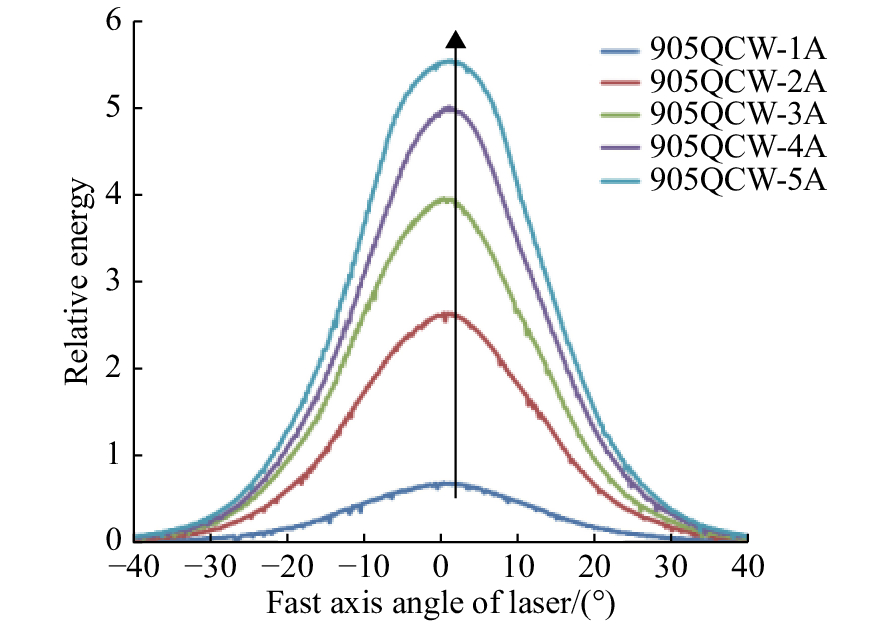
图 3 激光器光场能量拟合的概率密度函数图
Figure 3. Probability density function of laser field energy fitting

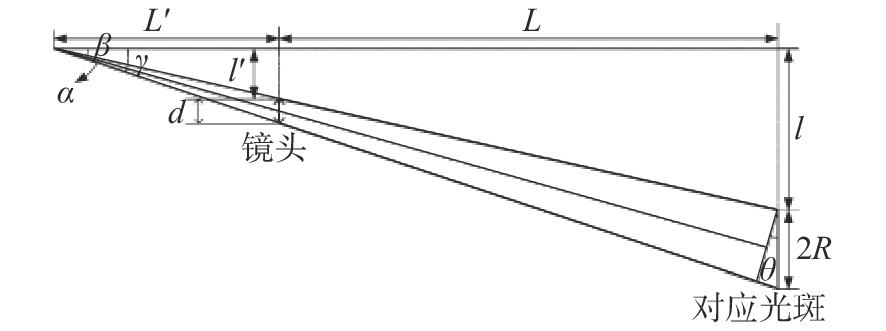
图 4 中心单位像元接收功率示意图
Figure 4. Schematic diagram of receiving power of central unit pixel
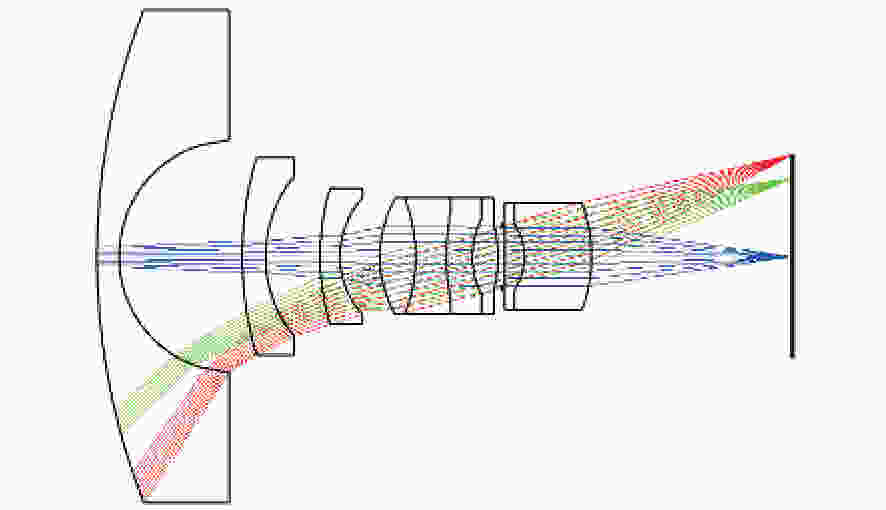
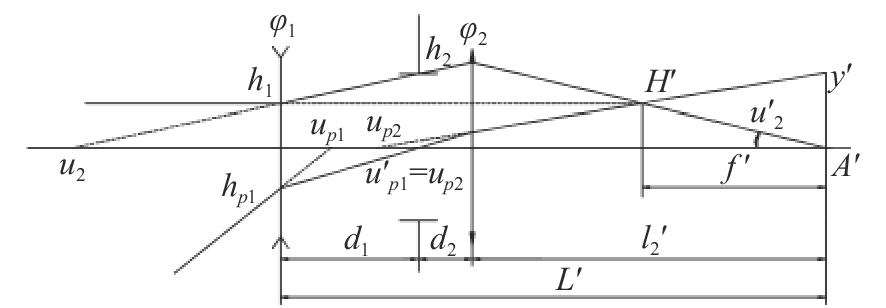
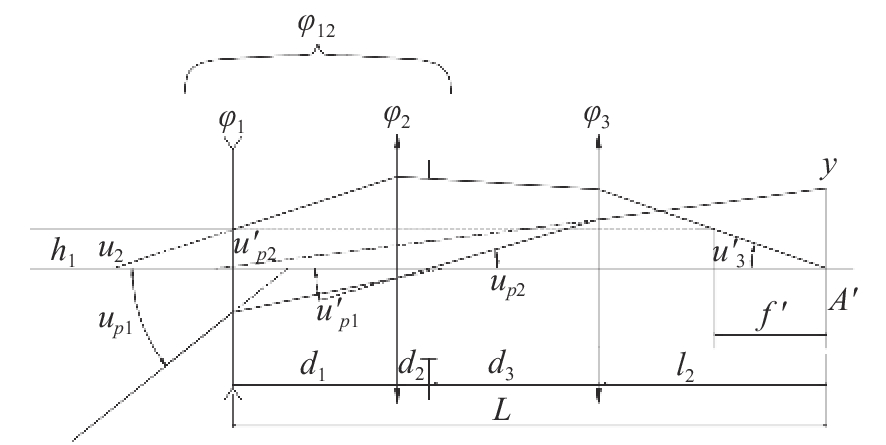
图 11 广角反摄远光学系统初始结构图
Figure 11. Initial structure of wide-angle inverse telephoto optical system
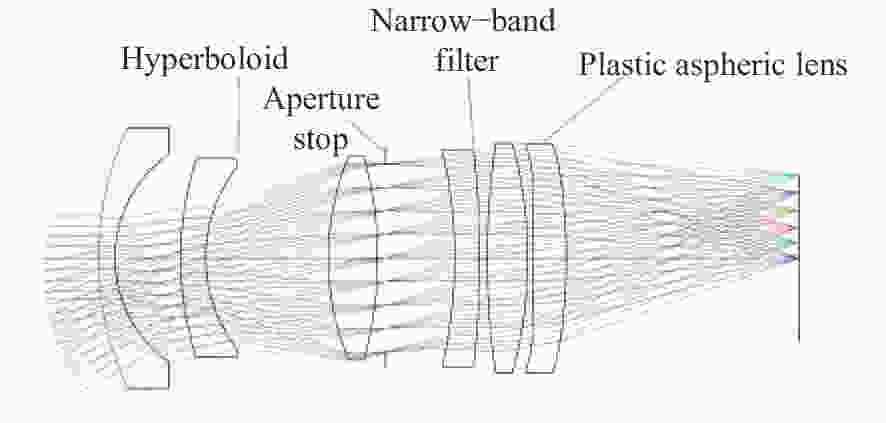
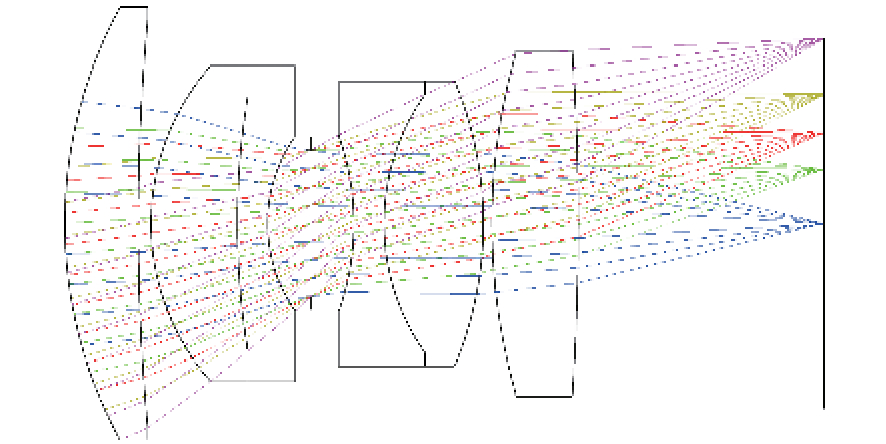
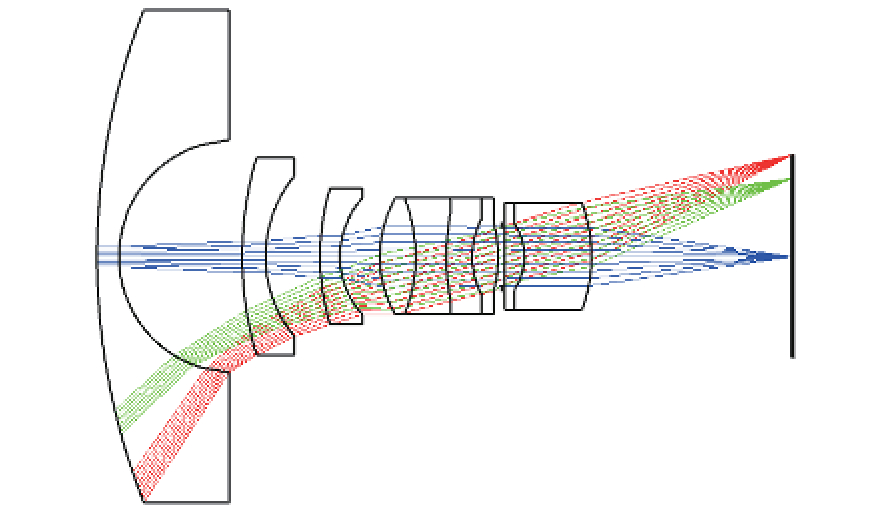
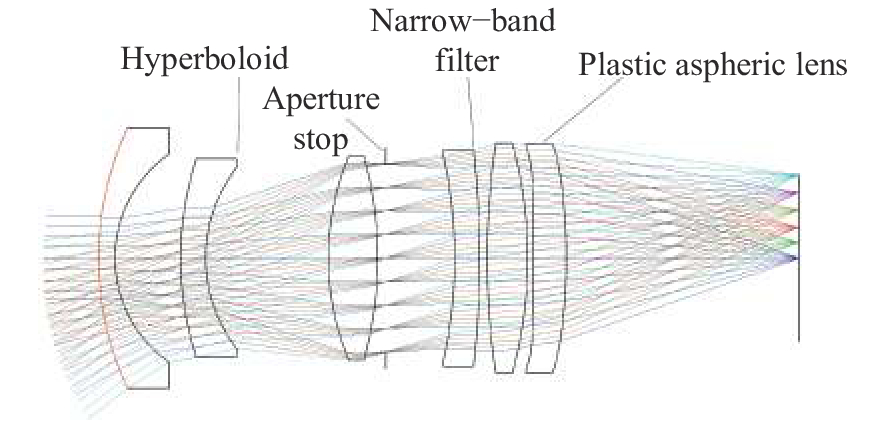
图 12 采用本文设计结果的光学系统结构图
Figure 12. Structure diagram of optical system applied the design results in this paper
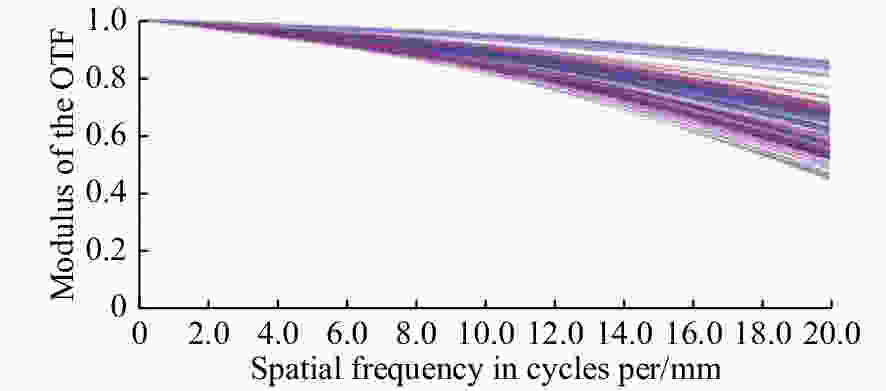
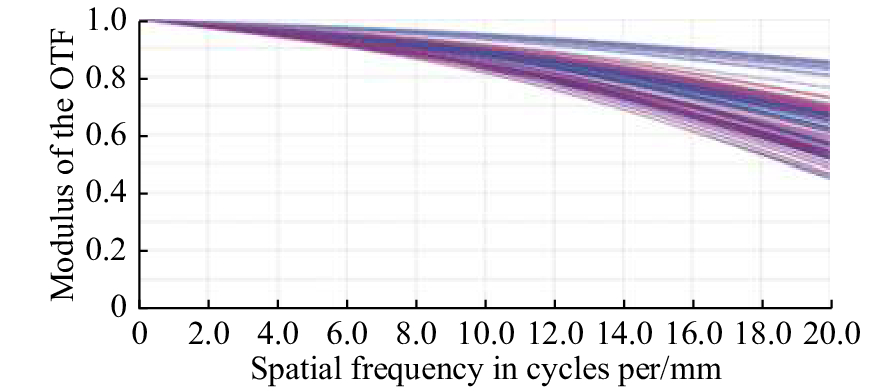
图 18 80次Monte Carlo灵敏度分析后MTF曲线
Figure 18. MTF curves after 80 Monte Carlo sensitivity analyses
表 1 概率密度函数参数
Table 1. Parameters of probability density function
参数 ax bx cx ay1 ay2 数值 5.58 0.820 7 16.91 9.508 −0.562 参数 ay3 ay4 by1 by2 cy 数值 0.144 5 0.237 8 −0.181 6 −2.311 3.626  下载: 导出CSV
下载: 导出CSV
表 2 积分时间为1.2×10−6 s单像元接收光能量的光电转换值
Table 2. Photoelectric conversion value of single pixel receiving light energy when integration time is 1.2×10−6 s
项目 光子数 电子数 电压 / V 中心 3.024×103 604.796 8 6.451×10−4 快轴边缘 26.157 0 5.231 4 5.580×10−6 慢轴边缘 26.157 0 4.761 1 5.078×10−6
下载: 导出CSV
表 3 积分时间为2×10−2 s单像元接收光能量的光电转换值
Table 3. Photoelectric conversion value of single pixel receiving light energy when integration time is 2×10−2 s
项目 光子数 电子数 电压 / V 中心 5.040×107 1.008×107 2×10−2 快轴边缘 4.359 5×105 8.719 0×104 10.751 9 慢轴边缘 3.967 6×105 7.935 2×104 0.093 0
下载: 导出CSV
表 4 光学参数表
Table 4. Optical parameter table
Items Requirement Field of view(FOV)/(°) 76 Relative aperture 1/1.4 Focal length/mm 15 Spectral range/μm 0.895~0.910 Relative distortion @ 0.8 FOV <10% Llumination uniformity <10% Dispersion spot radius/μm 20 MTF@20 lp/mm >0.5
下载: 导出CSV
表 5 光学结构参数
Table 5. Parameters of optical structure
Surface Radius/mm Thickness/mm Glass Conic 1OBJECT 37.384 2 H-ZLAF53B 0 2 15.434 8 0 3 36.146 3 EP8000 −3.241 4 17.647 15 −0.111 5 32.146 6 H-QF3 0 6 −45.553 1 0 7STOP Infinity 8.394 0 8 −58.153 3 H-ZLAF92 0 9 −124.417 0.957 0 10 95.702 4.927 H-ZLAF90 0 11 −53.595 0.723 0 12 2 848.534 4 EP8000 39.972 13 −67.378 28.409 9.173 14IMACE Infinity
下载: 导出CSV
表 6 非球面高次项数据表
Table 6. High-order data of aspheric mirror
Surface 2nd 4th 6th 8th 12 0 −1.573×10−5 2.001×10−8 −9.333×10−10 13 0 1.065×10−5 −7.026×10−8 3.473×10−10 Surface 10th 12th 14th 16th 12 4.642×10−12 −1.225×10−14 −1.047×10−17 9.050×10−20 13 −2.131×10−12 −1.311×10−14 3.658×10−17 −6.123×10−20
下载: 导出CSV
表 7 公差参数表
Table 7. Tolerance parameters
Items Value Fringe power/λ 3~5 Surface irregular/λ 0.2~0.3 Thickness/mm 0.05~0.08 Airspace/mm 0.01~0.02 Tilt/(') 0.5~0.9 Decenter&Roll/mm 0.05~0.07 Refractive index 0.000 5~0.000 7 Abbe number 0.005~0.007
下载: 导出CSV
-
[1] 孙明阳. 自动驾驶汽车模块化设计研究[J]. 工业设计,2019(9):47-48. doi: 10.3969/j.issn.1672-7053.2019.09.036SUN M Y. Research on the modular design of self-driving car[J]. Industrial Design, 2019(9): 47-48. (in Chinese) doi: 10.3969/j.issn.1672-7053.2019.09.036 [2] 陈琛, 胡春海, 李维善, 等. 物镜像面相对照度计算方法[J]. 光学学报,2016,36(11):1108001. doi: 10.3788/AOS201636.1108001CHEN CH, HU CH H, LI W SH, et al. Calculation method of relative illumination of lens image plane[J]. Acta Optica Sinica, 2016, 36(11): 1108001. (in Chinese) doi: 10.3788/AOS201636.1108001 [3] 罗萍萍, 桑思晗, 史文宗, 等. 基于FFT算法的激光有源非稳腔光场分布数值计算方法[J]. 航天返回与遥感,2019,40(4):86-94. doi: 10.3969/j.issn.1009-8518.2019.04.010LUO P P, SANG S H, SHI W Z, et al. Numerical calculation method of light field distribution for active unstable cavity resonator based on FFT algorithm[J]. Spacecraft Recovery &Remote Sensing, 2019, 40(4): 86-94. (in Chinese) doi: 10.3969/j.issn.1009-8518.2019.04.010 [4] 梁效文, 石磊. 一种便携式干涉仪动镜系统的设计[J]. 光谱学与光谱分析,2017,37(10):3255-3259.LIANG X W, SHI L. Design of a moving mirror scanning system for portable interferometer[J]. Spectroscopy and Spectral Analysis, 2017, 37(10): 3255-3259. (in Chinese) [5] 吴春婷, 姜研, 戴通宇, 等. 2μm掺钛固体激光器研究进展[J]. 发光学报,2018,39(11):1584-1597.WU CH T, JIANG Y, DAI T Y, et al. Research progress of 2μm Ho-doped solid-state laser[J]. Chinese Journal of Luminescence, 2018, 39(11): 1584-1597. (in Chinese) [6] 丁莹, 范静涛, 权巍, 等. 视觉系统光学渐晕效应非线性补偿方法[J]. 清华大学学报(自然科学版),2017,57(7):702-706.DING Y, FAN J T, QUAN W, et al. Nonlinear compensation for optical vignetting in vision systems[J]. Journal of Tsinghua University (Science &Technology) , 2017, 57(7): 702-706. (in Chinese) [7] 薛庆生. 星载超广角气溶胶探测仪均匀像面性光学设计[J]. 光子学报,2012,41(1):15-20. doi: 10.3788/gzxb20124101.0015XUE Q SH. Optical design of spaceborne low-distortion and super-wide-angle aerosol imager[J]. Acta Photonica Sinica, 2012, 41(1): 15-20. (in Chinese) doi: 10.3788/gzxb20124101.0015 [8] 王永仲, 周金鹏, 宫武鹏. 超大空域凝视光学系统的光阑像差[J]. 应用激光,1998,18(5):200-202.WANG Y ZH, ZHOU J P, GONG W P. The stop aberrations and aberration vignetting of fish-eye lenses or extreme wide-angle objectives[J]. Applied Laser, 1998, 18(5): 200-202. (in Chinese) [9] 王之江. 光学设计理论基础[M]. 2版. 北京: 科学出版杜, 1985: 103-110.WANG ZH J. Theoretical Basis of Optical Design[M]. 2nd ed. Beijing: Science Press, 1985: 103-110. (in Chinese) [10] GAJ M. Fifth-order field aberration coefficients for an optical surface of rotational symmetry[J]. Applied Optics, 1971, 10(7): 1642-1647. doi: 10.1364/AO.10.001642 [11] 赵肇雄, 刘勇. 初级慧差对圆偏振涡旋贝塞尔-高斯光束聚焦场的影响[J]. 中国激光,2010,37(3):739-742. doi: 10.3788/CJL20103703.0739ZHAO ZH X, LIU Y. Effect of primary coma aberration on focusing of a circularly polarized vortex Bessel-Gaussian beams[J]. Chinese Journal of Lasers, 2010, 37(3): 739-742. (in Chinese) doi: 10.3788/CJL20103703.0739 [12] 李维善, 陈琛, 刘宵婵, 等. 球幕投影数字鱼眼镜头的光学设计[J]. 应用光学,2016,37(1):39-44. doi: 10.5768/JAO201637.0101007LI W SH, CHEN CH, LIU X CH, et al. Optical design of digital fish-eye lens for dome-screen projector[J]. Journal of Applied Optics, 2016, 37(1): 39-44. (in Chinese) doi: 10.5768/JAO201637.0101007 -

 下载:
下载:








计量
- 文章访问数: 3884
- HTML全文浏览量: 2209
- PDF下载量: 407
- 被引次数: 0
