


-
摘要: 为提高光学天线能量利用效率,实现空间激光通信组网,本文对反射镜联动跟踪控制技术展开研究。首先,阐述了系统组成原理,详细论述了基于单探测器多执行器的反射镜联动跟踪控制策略。接着,通过分析激光链路能量,得到了联动跟踪约束条件及误差要求。然后,建立了双反射镜联动跟踪数学模型,对伺服控制器进行仿真。最后,搭建原理样机对跟踪性能进行测试。实验结果表明,系统能够对目标进行稳定跟踪,跟踪脱靶量精度优于83 μrad,双镜联动精度优于26 μrad,系统接收光功率显著提高。本文研究为实现空间一对多激光通信链路组网奠定了基础。Abstract: In order to improve the energy utilization efficiency of the optical antenna and realize the space laser communication networking, we study the mirror linkage tracking control technology. The principle of system composition is described, and a mirror linkage tracking control strategy based on a single-detector multi-actuator is discussed in detail. By analyzing the energy of a laser link, its linkage tracking constraints and error requirements are obtained. A mathematical model of double mirror linkage tracking is established. The servo controller is designed and simulated, and the prototype is built to test its tracking performance. The experimental results show that the system can track the target stably, the tracking target accuracy is better than 83 μrad, the double mirror linkage accuracy is better than 26 μrad and the received optical power of the system is significantly improved. The research in this paper lays a foundation for space one-to-many laser communication link networking.
-
Key words:
- laser communication /
- networking /
- linkage tracking /
- tracking accuracy /
- optical power
-
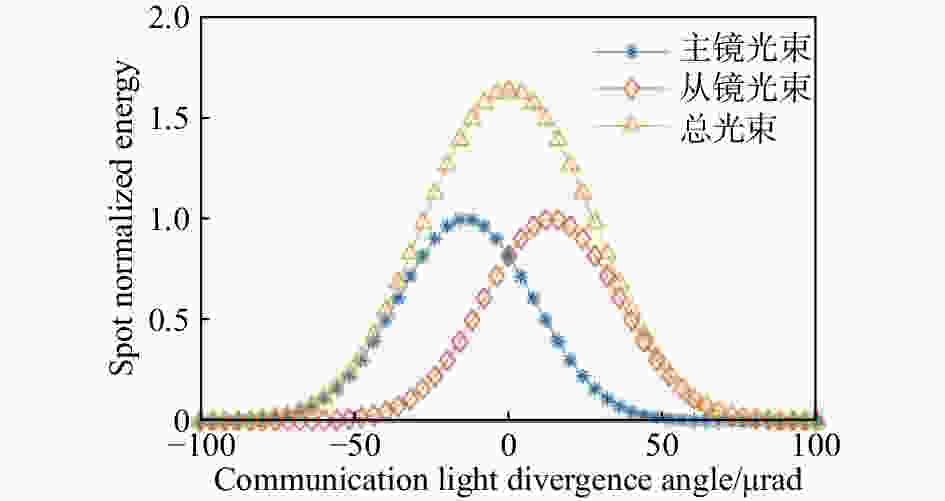
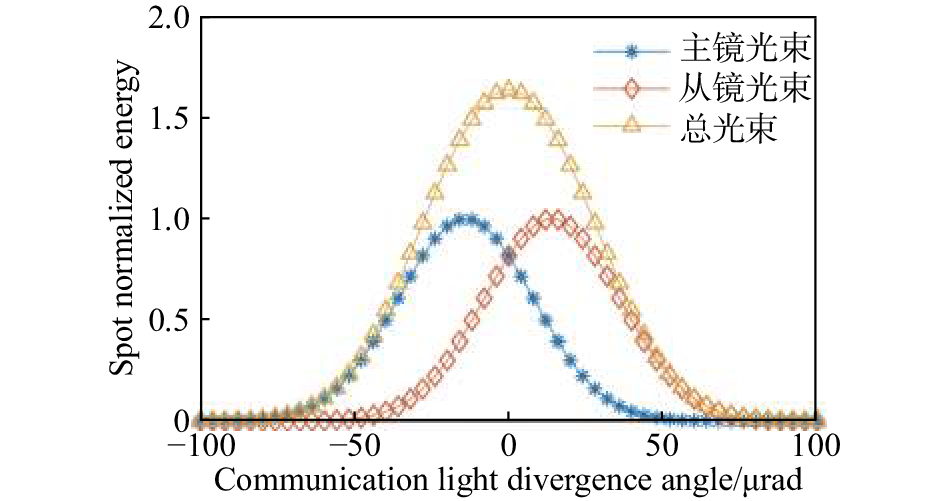
图 8 发射通信光束远场功率分布
Figure 8. Far-field power distributions of transmitted communication lights
表 1 接收端光功率测试结果
Table 1. Test results of optical power at the receiving end
跟踪方式 监测点平均光功率 单镜独立跟踪/dB −24.6 双镜联动跟踪/dB −21.9  下载: 导出CSV
下载: 导出CSV
-
[1] 高铎瑞, 李天伦, 孙悦, 等. 空间激光通信最新进展与发展趋势[J]. 中国光学,2018,11(6):901-913.GAO D R, LI T L, SUN Y, et al. Latest developments and trends of space laser communication[J]. Chinese Optics, 2018, 11(6): 901-913. (in Chinese) [2] 任建迎, 孙华燕, 张来线, 等. 空间激光通信发展现状及组网新方法[J]. 激光与红外,2019,49(2):143-150. doi: 10.3969/j.issn.1001-5078.2019.02.003REN J Y, SUN H Y, ZHANG L X, et al. Development status of space laser communication and new method of networking[J]. Laser &Infrared, 2019, 49(2): 143-150. (in Chinese) doi: 10.3969/j.issn.1001-5078.2019.02.003 [3] 付强, 姜会林, 王晓曼, 等. 空间激光通信研究现状及发展趋势[J]. 中国光学,2012,5(2):116-125.FU Q, JIANG H L, WANG X M, et al. Research status and development trend of space laser communication[J]. Chinese Optics, 2012, 5(2): 116-125. (in Chinese) [4] 李少辉, 陈小梅, 倪国强. 高精度卫星激光通信地面验证系统[J]. 光学精密工程,2017,25(5):1149-1158.LI SH H, CHEN X M, NI G Q. Highly precise ground certification system of satellite laser communication[J]. Optics and Precision Engineering, 2017, 25(5): 1149-1158. (in Chinese) [5] 姜会林, 付强, 赵义武, 等. 空间信息网络与激光通信发展现状及趋势[J]. 物联网学报,2019,3(2):1-8.JIANG H L, FU Q, ZHAO Y W, et al. Development status and trend of space information network and laser communication[J]. Chinese Journal on Internet of Things, 2019, 3(2): 1-8. (in Chinese) [6] 曾飞, 高世杰, 伞晓刚, 等. 机载激光通信系统发展现状与趋势[J]. 中国光学,2016,9(1):65-73.ZENG F, GAO SH J, SAN X G, et al. Development status and trend of airborne laser communication terminals[J]. Chinese Optics, 2016, 9(1): 65-73. (in Chinese) [7] 尹志忠, 陈静毅, 周贤伟. 美军卫星通信系统的发展及其技术研究[J]. 通信技术,2009,42(11):55-58. doi: 10.3969/j.issn.1002-0802.2009.11.019YIN ZH ZH, CHEN J Y, ZHOU X W. Development and technology of U. S. military satellite communications systems[J]. Communications Technology, 2009, 42(11): 55-58. (in Chinese) doi: 10.3969/j.issn.1002-0802.2009.11.019 [8] 吴应明, 刘兴, 罗广军, 等. 空间光通信网络技术的研究进展及架构体系[J]. 光通信技术,2017,41(11):46-49.WU Y M, LIU X, LUO G J, et al. Research progress and structure system of space optical communication network technology[J]. Optical Communication Technology, 2017, 41(11): 46-49. (in Chinese) [9] 于笑楠, 佟首峰, 董岩, 等. 空间激光通信组网单光束跟踪子系统[J]. 光学精密工程,2014,22(12):3348-3353.YU X N, TONG SH F, DONG Y, et al. Single beam tracking subsystem of space laser communication network[J]. Optics and Precision Engineering, 2014, 22(12): 3348-3353. (in Chinese) [10] 姜会林, 江伦, 宋延嵩, 等. 一点对多点同时空间激光通信光学跟瞄技术研究[J]. 中国激光,2015,42(4):0405008.JIANG H L, JIANG L, SONG Y S, et al. Research of optical and APT technology in one-point to multi-point simultaneous space laser communication system[J]. Chinese Journal of Lasers, 2015, 42(4): 0405008. (in Chinese) [11] 姜会林, 胡源, 丁莹, 等. 空间激光通信组网光学原理研究[J]. 光学学报,2012,32(10):1006003.JIANG H L, HU Y, DING Y, et al. Optical principle research of space laser communication network[J]. Acta Optica Sinica, 2012, 32(10): 1006003. (in Chinese) [12] 姜会林, 胡源, 宋延嵩, 等. 空间激光通信组网光端机技术研究[J]. 航天遥感与返回,2011,32(5):52-59.JIANG H L, HU Y, SONG Y S, et al. Research on space laser communication network[J]. Spacecraft Recovery &Remote Sensing, 2011, 32(5): 52-59. (in Chinese) [13] 张雅琳, 安岩, 王超, 等. 空间激光通信组网中旋转抛物面基底面型研究[J]. 光学学报,2015,35(7):0706003.ZHANG Y L, AN Y, WANG CH, et al. Research on rotating paraboloid based surface in space laser communication network[J]. Acta Optica Sinica, 2015, 35(7): 0706003. (in Chinese) [14] 姜会林, 佟首峰, 张立中, 等. 空间激光通信技术与系统[M]. 北京: 国防工业出版社, 2010: 9-22.JIANG H L, TONG SH F, ZHANG L ZH, et al.. The Technologies and Systems of Space Laser Communication[M]. Beijing: National Defend Industry Press, 2010: 9-22. (in Chinese) -

 下载:
下载:



图(13) / 表(1)
计量
- 文章访问数: 4090
- HTML全文浏览量: 1842
- PDF下载量: 161
- 被引次数: 0
