


Uncertainty analysis in cross-calibration and optimization calculation of calibration coefficients
-
摘要: 一般交叉定标方法是利用普通最小二乘法的回归方式对时间、空间、观测几何、光谱匹配得到的近一致观测数据点对来计算定标系数,该方法忽略了各数据点对的质量差异,降低了定标系数的有效性。针对此问题,本文提出了基于不确定度计算的定标改进方法,利用不确定度分析方法计算数据点对中各辐射基准值的不确定度并给出权重系数,采用加权最小二乘法回归定标系数。选取与在研的基准载荷参数最为接近的HYPERION作为辐射基准替代载荷,分别利用普通最小二乘法和加权最小二乘法对MODIS CH1~7进行了定标,采用MODIS官方定标系数作为真值对定标结果进行验证。结果表明,采用加权最小二乘法对MODIS的1、2、4、5、6、7通道回归的定标系数更接近真值,定标结果的最大相对误差与传统方法相比降低了3%~5%,平均相对误差降低了0.5%~1.5%,说明本文的加权最小二乘法可进一步提升交叉定标精度。Abstract: The general cross-calibration method uses the ordinary least square method to regress the calibration coefficient by data points selected after time, spatial, observation geometrics and spectral collocation. However, the ordinary least square algorithm would reduce the validity of the regressed result because of ignoring the differences in quality between each data point. An optimized method based on the calculation of uncertainty was proposed. This uncertainty analysis method was used to quantify the uncertainty of the radiation standard value for each data point, and their weight factors were calculated. The weighted least square method was used to regress the calibration coefficient. Using HYPERION as a radiance standard, the calibration coefficients of MODIS channels 1 to 7 were each regressed using the ordinary least squares method and the weighted least squares method. The regressed coefficients were compared with the official calibration coefficient. The results show that the calibration coefficients calculated using the weighted least squares method were closer to the official coefficients of MODIS channels 1, 2, 4, 5, 6, and 7. The maximum relative error reduced to 3%~5% and the average relative error decreased to 0.5%~1.5% compared with the ordinary least squares method, which indicates that the weighted least squares method proposed in this paper can further improve the calculation accuracy of cross-calibration.
-
Key words:
- radiance standard /
- solar reflective band /
- cross-calibration /
- weighted least square /
- uncertainty
-

图 2 2012年7月10日HYPERION(左)和MODIS(右)过境Liyba4场地时的影像
Figure 2. Images of HYPERION(left) and MODIS(right) when they passed the Liyba4 site on 10th July, 2012

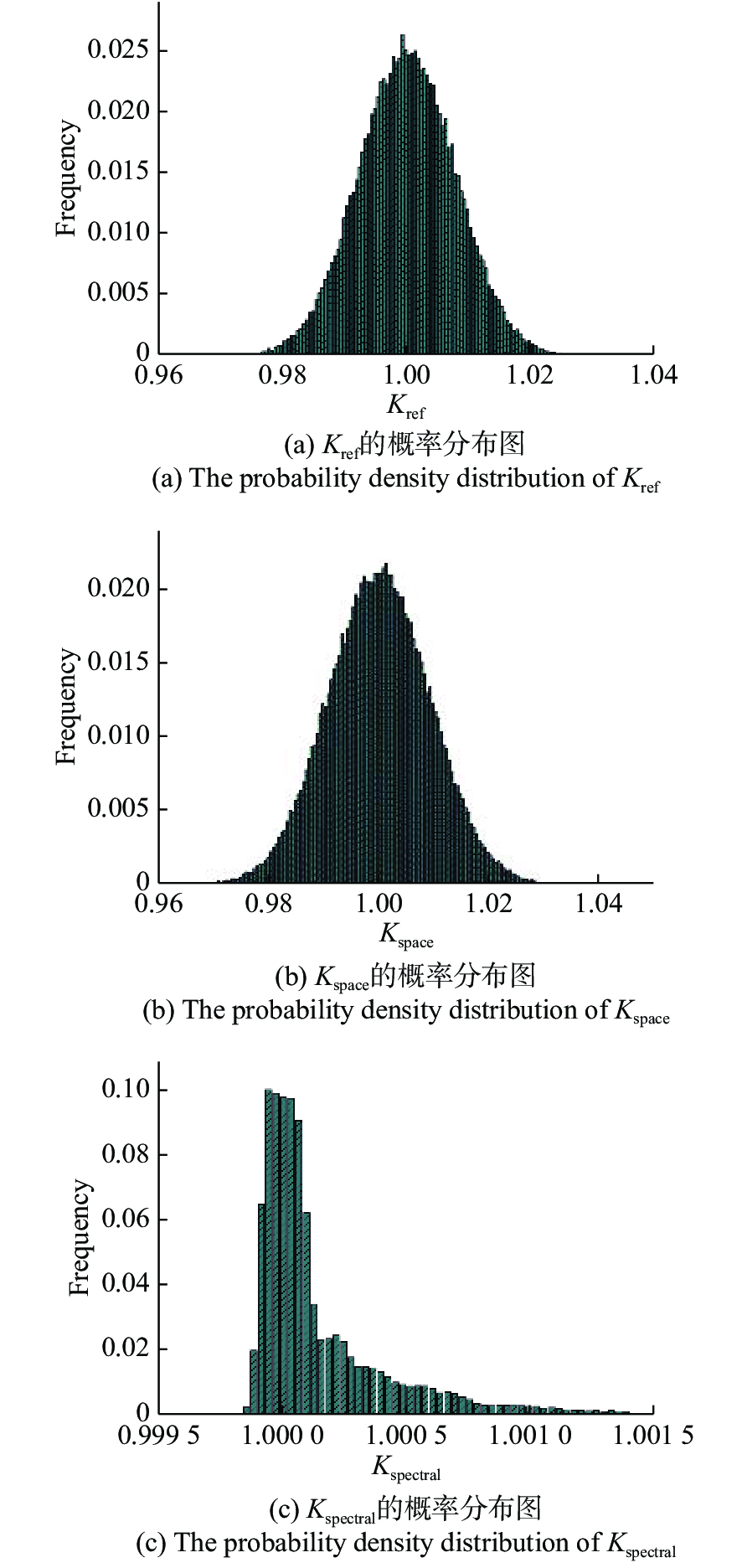
图 3 MCM法各项K因子概率分布图
Figure 3. The probability density distribution of K-factors of each term of MCM

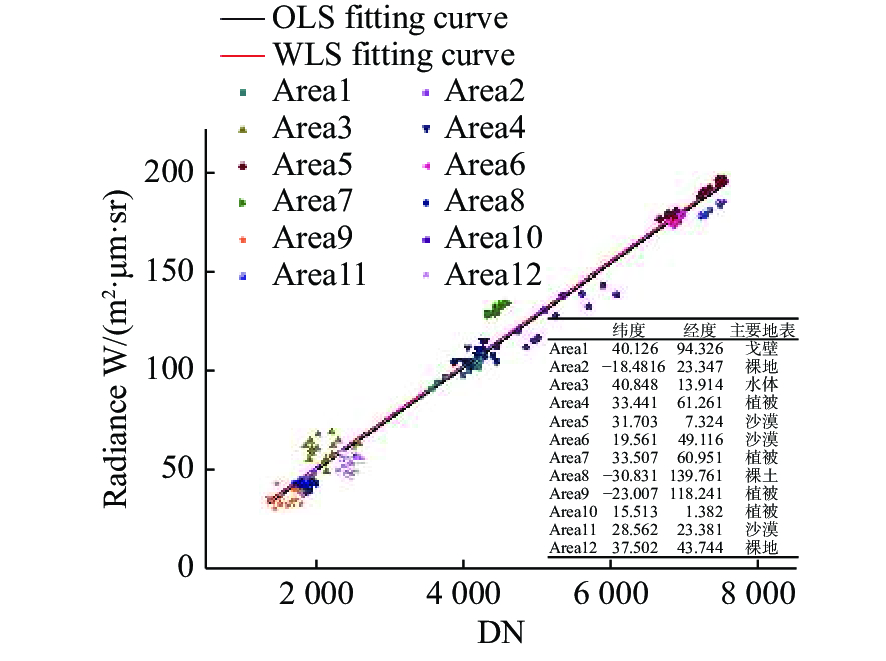
图 4 HYPERION对MODIS CH01定标数据点对以及OLS和WLS的回归定标线
Figure 4. The data points of the MODIS CH01 and regression results of WLS and OLS

图 5 WLS和OLS计算的回归系数对同一DN值序列的定标结果与官方定标结果的相对误差
Figure 5. The relative error between the regressed coefficients by WLS and OLS calibrating a DN sequence with the official calibrated coefficients
表 1 与基准载荷指标相近的高光谱成像仪参数
Table 1. Hyperspectral imager′s parameters similar to the radiance standard remote sensor index
载荷名称 光谱覆盖
范围/nm光谱分辨率/
nm空间分辨率/
m幅宽/
km通道数 HICO 380~960 5.7 100 — — HYPERION 400~2 500 10 30 7.7 242 LAC 930~1 580 2~6 250 185 256 HIS 450~950 4 100 50 128  下载: 导出CSV
下载: 导出CSV
表 2 WLS和OLS对MODIS CH1~7通道的定标系数回归结果
Table 2. The calibration result of MODIS CH1~7 by WLS and OLS
MODIS CH 1 2 3 4 5 6 7 β0 0.000 0 0.000 0 0.000 0 0.000 0 0.000 0 0.000 0 0.000 0 β1 0.027 2 0.010 2 0.036 1 0.024 9 0.005 9 0.002 7 0.000 8 βOLS 0 −1.902 5 −1.951 6 −4.023 8 −0.900 5 −2.885 8 −0.746 6 −0.496 0 βOLS 1 0.026 1 0.009 6 0.031 8 0.023 4 0.005 3 0.002 4 0.000 8 βWLS 0 −0.325 3 −0.288 3 −5.891 5 −2.501 9 −2.379 2 −0.730 2 −0.364 4 βWLS 1 0.026 1 0.009 6 0.032 5 0.024 0 0.005 3 0.002 4 0.000 8 ${{{\epsilon}}_{{{\max}}\;{\rm{OLS}}}}$ 0.091 2 0.110 1 0.215 4 0.062 9 0.213 1 0.142 8 0.229 2 ${{{\epsilon}}_{{{\max}}\;{\rm{WLS}}}}$ 0.048 6 0.065 4 0.238 6 0.042 0 0.160 9 0.106 0 0.170 2 εOLS 0.058 9 0.076 1 0.164 7 0.068 9 0.149 9 0.126 5 0.071 6 εWLS 0.043 0 0.060 4 0.164 3 0.064 9 0.138 8 0.119 4 0.054 4 RMSEOLS 6.904 6 7.364 8 16.573 1 6.934 6 8.633 2 3.893 7 0.466 3 RMSEWLS 5.455 2 6.254 1 16.095 9 5.896 0 8.061 9 3.667 8 0.359 7
下载: 导出CSV
-
[1] CHANDER G, HEWISON T J, FOX N, et al. Overview of intercalibration of satellite instruments[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1056-1080. doi: 10.1109/TGRS.2012.2228654 [2] LUKASHIN C, WIELICKI B A, YOUNG D F, et al. Uncertainty estimates for imager reference inter-calibration with CLARREO reflected solar spectrometer[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1425-1436. doi: 10.1109/TGRS.2012.2233480 [3] National Research Council. Earth Science and Applications from Space: National Imperatives for the Next Decade and Beyond[M]. Washington, DC, USA: National Academies Press, 2007. [4] CEOS, W M O, GSICS, et al.. SI-traceable space-based climate observing system workshop[R]. London, UK: NPL, 2019. [5] GORROÑO J, BANKS A C, FOX N P, et al. Radiometric inter-sensor cross-calibration uncertainty using a traceable high accuracy reference hyperspectral imager[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 130: 393-417. doi: 10.1016/j.isprsjprs.2017.07.002 [6] ROITHMAYR C M, LUKASHIN C, SPETH P W, et al. CLARREO approach for reference intercalibration of reflected solar sensors: on-orbit data matching and sampling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(10): 6762-6774. doi: 10.1109/TGRS.2014.2302397 [7] 王玉鹏, 胡秀清, 王红睿, 等. 可在轨溯源的太阳反射波段光学遥感仪器辐射定标基准传递链路[J]. 光学 精密工程,2015,23(7):1807-1812. doi: 10.3788/OPE.20152307.1807WANG Y P, HU X Q, WANG H R, et al. Standard transfer chain for radiometric calibration of optical sensing instruments with traceability[J]. Optics and Precision Engineering, 2015, 23(7): 1807-1812. (in Chinese) doi: 10.3788/OPE.20152307.1807 [8] 陈申玮, 徐娜, 戴铁, 等. 空间辐射基准传递不确定性的光谱敏感性分析[J]. 光学学报,2018,38(1):0128004. doi: 10.3788/AOS201838.0128004CHEN SH W, XU N, DAI T, et al. Sensitivity of intercalibration uncertainty on spectral sampling of space-based radiance standard[J]. Acta Optica Sinica, 2018, 38(1): 0128004. (in Chinese) doi: 10.3788/AOS201838.0128004 [9] 赵维宁, 胡秀清, 方伟, 等. 卫星光学仪器辐射交互定标方法的应用和发展[J]. 光学 精密工程,2015,23(7):1921-1931. doi: 10.3788/OPE.20152307.1921ZHAO W N, HU X Q, FANG W, et al. Development and applications of intercalibration for satellite optical instruments[J]. Optics and Precision Engineering, 2015, 23(7): 1921-1931. (in Chinese) doi: 10.3788/OPE.20152307.1921 [10] XIONG X X, ANGAL A, BUTLER J, et al. Global space-based inter-calibration system reflective solar calibration reference: from Aqua MODIS to S-NPP VIIRS[J]. Proceedings of SPIE, 2016, 9881: 98811D. [11] 徐文斌, 郑小兵, 易维宁. 基于超光谱成像仪Hyperion的交叉定标方法[J]. 光学学报,2013,33(5):0528002. doi: 10.3788/AOS201333.0528002XU W B, ZHENG X B, YI W N. Cross-calibration method based on hyperspectral imager Hyperion[J]. Acta Optica Sinica, 2013, 33(5): 0528002. (in Chinese) doi: 10.3788/AOS201333.0528002 [12] HUNG K W, SIU W C. Improved image interpolation using bilateral filter for weighted least square estimation[C]. Proceedings of 2010 IEEE International Conference on Image Processing, IEEE, 2010. [13] PETRAKOS G, ARTELARIS P. European regional convergence revisited: a weighted least squares approach[J]. Growth and Change, 2009, 40(2): 314-331. doi: 10.1111/j.1468-2257.2009.00477.x [14] USGS. EO-1 HYPERION L1GST product[EB/OL]. USGS. https://earthexplorer.usgs.gov/.[2019-03-24]. [15] NASA. TERRA MODIS Level 1B Calibrated Radiances[EB/OL]. NASA EOSDIS LP DAAC. https://ladsweb.modaps.eosdis.nasa.gov/search/. [16] CHANDER G, HELDER D L, AARON D, et al. Assessment of spectral, misregistration, and spatial uncertainties inherent in the cross-calibration study[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1282-1296. doi: 10.1109/TGRS.2012.2228008 [17] JCGM. JCGM 101: 2008 Evaluation of measurement data – supplement 1 to the “guide to the expression of uncertainty in measurement” – propagation of distributions using a Monte Carlo method[S]. BIPM Joint Committee for Guides in Metrology, 2008. [18] XIONG X, CHE N, XIE Y, et al. Four-years of on-orbit spectral characterization results for Aqua MODIS reflective solar bands[J]. Proceedings of SPIE, 2006, 6361: 63610S. doi: 10.1117/12.687163 -

 下载:
下载:




计量
- 文章访问数: 2273
- HTML全文浏览量: 1165
- PDF下载量: 109
- 被引次数: 0
