


Nano-scale focus control technology in electron beam wafer pattern inspection system
-
摘要: 带电粒子束成像检测技术是一种可以提供纳米级测量精度的技术,广泛应用于半导体检测中。在进行硅片检测时,要求待测硅片在扫描检测过程中一直处于电子束的焦深范围(DoF)内。本文提出一种毫米级控制范围、纳米级控制精度、高度测量时间在亚毫秒量级的粗精结合的闭环硅片高度控制技术。它的核心子系统是一套光学硅片高度测量系统,在进行粗控制时,数字相机的成像面作为一个光栅图像接收面,硅片的高度信息通过测量光栅线条在成像面上的位移获得。在接近目标高度时,数字相机的成像面作为一个虚拟的数字光栅使用。它与光学光栅图像存在一定周期差,两者构成类似机械游标卡尺的结构,本文称为光学游标卡尺,实验表明该技术可以在成像面上细分像素尺寸10×以上。当用其测量硅片高度时,粗测范围达毫米量级,粗测时间小于0.38 ms,精测分辨率小于80 nm,精测时间小于0.09 ms。利用该硅片高度测量系统进行硅片高度的初步闭环反馈控制,控制精度达到15 nm,在电子束硅片图形检测系统中具有广阔的应用前景。Abstract: Charged particle beam imaging inspection technology is widely applied in semiconductor industry to find defects on wafers with nanometer degree measurement accuracy. During the wafer inspection, the wafer to be measured is supposed to be in the range of depth of focus(DoF) of the electron beam. In this paper we propose a close-loop wafer height control technology with millimeter range, nanometer accuracy and sub-microsecond height measurement time. It combines coarse control and fine control with an identical optical wafer height measurement system. During the coarse control, the imaging plane of the digital camera functions as a pure optical sensor. The wafer height information is obtained by measuring the displacement of one certain grating line. When approaching to the target position, the imaging plane changes to be a virtual digital grating. The so called optical vernier caliper, analogous with the mechanical vernier caliper, is constructed with the optical grating image and the digital grating image when there is some period difference between them. The experiment shows that such structure subdivides pixels by a factor of 10×or more on the image plane. When the system is used to measure the wafer height, the coarse measurement range is in millimeter degree and the coarse measurement time is 0.38 ms. The fine measurement resolution is less than 80 nm, and the fine measurement time is 0.09 ms. The close-loop feedback control is conducted with the system. The preliminary experiment shows the control accuracy is 15 nm. Such nanometer degree focus control accuracy is most advantageous in the charged particle beam inspection in the future.
-

图 2 (a) 合成光栅图像C1,(b)合成光栅图像C2
Figure 2. (a)Synthetic grating image C1; (b)Synthetic grating image C2

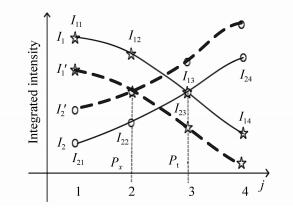
图 4 随j变化的归一化积分光强差分曲线
Figure 4. Normalized differentiation curves of integrated intensity vs j

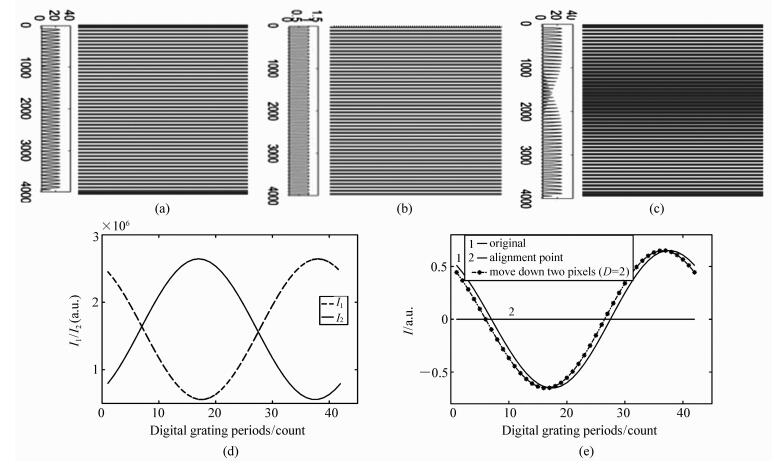
图 5 验证光学游标卡尺测量位移原理仿真实验结果(a)光学光栅图像A; (b)数字光栅B; (c)合成光栅图像C1; (d)随数字光栅周期变化的积分光强曲线I1和I2; (e)当光栅移动2个像素时,归一化积分光强差分曲线I的变化
Figure 5. Simulation results of displacement measurement principle of optical vernier caliper. (a)Optical grating image A; (b)digital grating B; (c)synthetic grating image C1; (d)integrated intensity curves I1 and I2 change with digital grating periods; (e)the variation of the normalized integrated intensity differentiation curve I when the optical grating moves 2 pixels

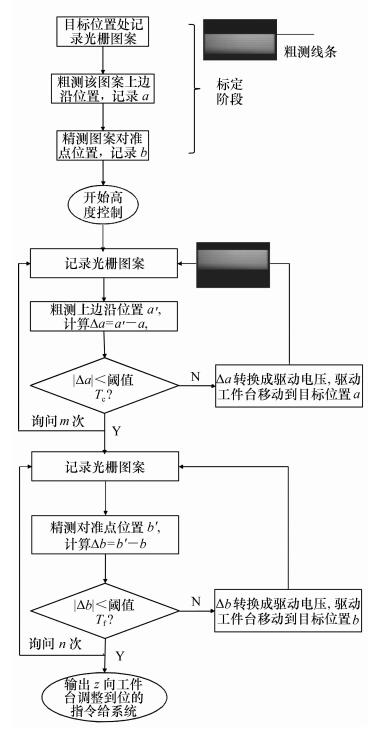
图 7 粗精结合的闭环控制反馈方案
Figure 7. Close-loop focus control flow combined with coarse control and fine control

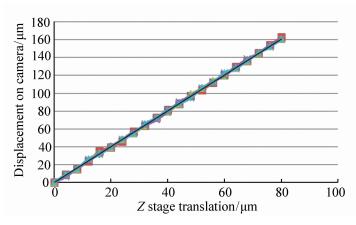
图 11 相机上光栅位移与z向位移台位移的关系曲线
Figure 11. Relationship between the grating displacement on the camera and the displacement of the z stage

图 12 测量系统分辨率使用的系列图像或曲线。(a)数字光栅B;(b)合成图像C1;(c)积分光强曲线;(d)归一化积分光强差曲线;(e)对准点随硅片位置移动的关系
Figure 12. A series of images or curves used for measurement resolution test. (a)Digital grating B; (b)synthetic image C1; (c)integrated intensity curves; (d)normalized integrated intensity differentiation curve; (e)relationship between the alignment points and the wafer translation

图 13 粗测与精测结果对比
Figure 13. Comparison between coarse measurement and fine measurement results
表 1 硅片高度测量系统测量时间
Table 1. Measurement time of the wafer height measurement system
(Unit: ms) 次数 粗测 精测 次数 粗测 精测 1 0.36 0.09 9 0.37 0.09 2 0.37 0.09 10 0.37 0.09 3 0.37 0.09 11 0.37 0.09 4 0.37 0.09 12 0.37 0.09 5 0.37 0.09 13 0.37 0.09 6 0.38 0.09 14 0.37 0.09 7 0.37 0.09 15 0.37 0.09 8 0.38 0.09  下载: 导出CSV
下载: 导出CSV
-
[1] CASS T R, HENDRICKS D, JAU J, et al.. Application of the SEMSpec electron-beam inspection system to in-process defect detection on semiconductor wafers[J]. Microelectronic Engineering, 1996, 30(1-4):567-570. doi: 10.1016/0167-9317(95)00311-8 [2] OBERAI A, YUAN J S. Smart E-beam for defect identification & analysis in the nanoscale technology nodes:technical perspectives[J]. Electronics, 2017, 6(4):87. doi: 10.3390/electronics6040087 [3] WILSON L. International technology roadmap for semiconductors-ITRS[R]. Washington: Semiconductor Industry Association, 2013. [4] MEISBURGER D, BRODIE A D, CHADWICK C, et al.. Electron beam inspection system and method: US, 5502306[P]. 1996-03-26. [5] WARD B W, NOTTE J A, FARKAS L S, et al.. Ion sources, systems and methods: US, 9236225[P]. 2016-01-12. [6] ZAFAR K, KEKARE S, CHANG E, et al.. Methods and systems for utilizing design data in combination with inspection data: US, 8923600[P]. 2014-12-30. [7] 许志涛, 龙科慧, 刘金国, 等.空间相机调焦机构精度检测系统设计[J].液晶与显示, 2013, 28(6):943-947. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201306024XU ZH T, LONG K H, LIU J G, et al.. Design of focusing mechanism accuracy detection system of space camera[J]. Chinese Journal of Liquid Crystals and Displays, 2013, 28(6):943-947.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201306024 [8] BLAIR W W, DORAN S K, LANGNER G O. Automatic focus and deflection correction in E-beam system using optical target height measurements: US, 4468565[P]. 1984-08-28. [9] COLLOPY T K, HAIRE D F. High resolution automatic focus correction electronic subsystem for E-beam lithography: US, 4821196[P]. 1989-04-11. [10] DORAN S K, ENICHEN W A, GROVES T R, et al.. Electron beam nano-metrology system: US, 5585629[P]. 1996-12-17. [11] 王涛, 张涛, 张春光, 等.狭缝光栅分光特性及其对视区的影响[J].液晶与显示, 2013, 28(1):59-63. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201301011WANG T, ZHANG T, ZHANG CH G, et al.. Optical properties of parallax barrier and it's influence on view zone[J]. Chinese Journal of Liquid Crystals and Displays, 2013, 28(1):59-63.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201301011 [12] WATANABE M, TAKEDA M, HAYAKAWA K, et al.. Charged particle beam apparatus and method for automatically correcting astigmatism and for height detection: US, 20060060781[P]. 2006-03-23. [13] SHIMIZU Y. Method for measuring resolution of charged particle beam and charged particle beam drawing apparatus: US, 20180040456[P]. 2018-02-18. [14] WANG J, NGUYEN V D, WANG Y X, et al.. Dynamic focus adjustment with optical height detection apparatus in electron beam system: US, 9400176[P]. 2016-07-26. [15] WANG Y X, NGUYEN V D, ZHANG J. Optical auto focusing system and methord for electron beam inspection tool: US, 20080302974[P]. 2008-12-11. [16] FABIJANSKA A. Subpixel edge detection in blurry and noisy images[J]. International Journal of Computer Science & Applications, 2015, 12(2):1-19. [17] GUIZAR-SICAIROS M, THURMAN S T, FIENUP J R. Efficient subpixel image registration algorithms[J]. Optics Letters, 2008, 33(2):156-158. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ025592948/ [18] ROSTYKU-SICAIROS M, ROSSI M, MOSER C. Compact lensless subpixel resolution large field of view microscope[J]. Optics Letters, 2018, 43(8):1654-1657. doi: 10.1364/OL.43.001654 [19] 陈晓东, 李为民, 李静, 等.利用重心法求光斑信号位置的误差分析[J].光学技术, 2000, 26(1):5-8. doi: 10.3321/j.issn:1002-1582.2000.01.005CHEN X D, LI W M, LI J, et al.. Error analysis of the center of gravity method when used to get the position of a facula[J]. Optical Technique, 2000, 26(1):5-8.(in Chinese) doi: 10.3321/j.issn:1002-1582.2000.01.005 [20] 李朝辉, 武克用.图像矩心内插法在空间相机实时检焦中的应用[J].光学 精密工程, 2000, 8(4):335-339. doi: 10.3321/j.issn:1004-924X.2000.04.008LI CH H, WU K Y. Application of centroid sensing method in real-time autofocusing system used in space camera[J]. Opt. Precision Eng., 2000, 8(4):335-339.(in Chinese). doi: 10.3321/j.issn:1004-924X.2000.04.008 [21] 谢伦治, 卞洪林, 王振华.面阵探测器的像点亚像素定位研究[J].光学与光电技术, 2003, 1(2):51-56. doi: 10.3969/j.issn.1672-3392.2003.02.014XIE L ZH, BIAN H L, WANG ZH H. Study of the subpixel interpolation of image spots with matrix detectors[J]. Optics & Optoelectronic Technology, 2003, 1(2):51-56.(in Chinese) doi: 10.3969/j.issn.1672-3392.2003.02.014 [22] 王海涌, 黄江艳.CCD视频幅值调节器的设计及目标精确定位算法[J].光学 精密工程, 2008, 16(6):1105-1109. doi: 10.3321/j.issn:1004-924X.2008.06.022WANG H Y, HUANG J Y. Design of CCD video amplitude controller and target precise locating algorithm[J]. Opt. Precision Eng., 2008, 16(6):1105-1109.(in Chinese) doi: 10.3321/j.issn:1004-924X.2008.06.022 [23] 王林波, 王延杰, 邸男, 等.基于几何特征的圆形标志点亚像素中心定位[J].液晶与显示, 2014, 29(6):1003-1009. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201406024WANG L B, WANG Y J, DI N, et al.. Subpixel location of circle target center based on geometric features[J]. Chinese Journal of Liquid Crystals and Displays, 2014, 29(6):1003-1009.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201406024 [24] BOONMAN M E J, BROODBAKKER P J M, NIJMEIJER G J, et al.. Off-axis levelling in lithographic projection apparatus: US, 20040130691[P]. 2004-07-08. [25] HIDAKA Y, NAGAYAMA T. Surface position detection apparatus, exposure apparatus, and exposure method: US, 9927713[P]. 2018-03-27. [26] DENBOEF A J. Optical wafer metrology sensors for process-robust CD and overlay control in semiconductor device manufacturing[J]. Surface Topography:Metrology and Properties, 2016, 4(2):023001. doi: 10.1088/2051-672X/4/2/023001 [27] 节德刚, 刘延杰, 孙立宁, 等.基于双光栅尺的高速高精度位移测量方法[J].光学 精密工程, 2007, 15(7):1077-1083. doi: 10.3321/j.issn:1004-924X.2007.07.014JIE D G, LIU Y J, SUN L N, et al.. A high speed and high precision displacement measurement methord using double grating scales[J]. Opt. Precision Eng., 2007, 15(7):1077-1083.(in Chinese) doi: 10.3321/j.issn:1004-924X.2007.07.014 [28] 吴耀春, 萧泽新.基于光栅检测的显微镜闭环扫描控制系统的设计[J].光学与光电技术, 2008, 6(2):71-73, 77. doi: 10.3969/j.issn.1672-3392.2008.02.019WU Y CH, XIAO Z X. Design of microscopical closed-loop scanning and control system based on grating checks[J]. Optics & Optoelectronic Technology, 2008, 6(2):71-73, 77.(in Chinese) doi: 10.3969/j.issn.1672-3392.2008.02.019 [29] RAKHMANOV M, EVANS M, YAMAMOTO H. An optical vernier technique for in situ measurement of the length of long Fabry-Perot cavities[J]. Measurement Science and Technology, 1999, 10(3):190-194. doi: 10.1088/0957-0233/10/3/013 [30] CHEN F F, FENG J, HONG ZH W. Digital sun sensor based on the optical vernier measuring principle[J]. Measurement Science and Technology, 2006, 17(9):2494-2498. doi: 10.1088/0957-0233/17/9/017 [31] 赵斌.环栅图像的数字莫尔条纹扫描定中方法[J].光学 精密工程, 2002, 10(1):19-24. doi: 10.3321/j.issn:1004-924X.2002.01.004ZHAO B. Digital moire fringe scanning method for centering ring grating images[J]. Opt. Precision Eng., 2002, 10(1):19-24.(in Chinese). doi: 10.3321/j.issn:1004-924X.2002.01.004 -

 下载:
下载:









计量
- 文章访问数: 3284
- HTML全文浏览量: 1373
- PDF下载量: 272
- 被引次数: 0
