


-
摘要: 当星敏感器在动态条件下工作时,在成像的过程中星点会因能量的分散而出现运动模糊现象,导致图像的信噪比降低,星点的模糊区域很难被提取,从而降低了星点质心的定位精度,严重影响星敏感器的姿态测量精度。为此,文中提出了一种基于区域滤波的模糊星图复原方法,在有效提高图像信噪比的同时可提高星点质心的定位精度。首先,根据星敏感器的工作特性,建立了不同工作条件下星点质心的运动模型。然后,根据运动模型确定星点质心的运动轨迹,进而提取星点的模糊区域,再利用图像处理算法对模糊区域内外的图像分别进行预处理。最后,利用图像复原算法对模糊星图进行复原。实验结果表明:在2(°)/s的动态条件下,区域滤波算法能够有效提高模糊星图的信噪比,并且复原图像中星点质心的定位误差不超过0.1 pixel,可以满足星敏感器对高质心定位精度的要求。Abstract: Under the dynamic working conditions for a star sensor, motion blur will appear in a star because of its energy dispersion in the process of imaging, which leads to a decrease in the signal to noise ratio(SNR) and makes the blurred region difficult to extract. Meanwhile, this causes a degradation in star centroid positon accuracy and attitude accuracy in the star sensor. Therefore, a restoration method for blurred star images based on region filters is presented in this paper, which simultaneously concentrates on the improvement of SNR and star centroid accuracy. Firstly, the kinematic models of a star centroid under different conditions are set up based on the characteristics of star sensors. Secondly, the motion trail of star centroid is determined based on the kinematic model, allowing the star blurred region to be extracted. The images inside and outside the star blurred region are then preprocessed by image processing algorithm respectively. Finally, the blurred star image is restored by an image restoration algorithm. The experiment results indicate that under the dynamic condition of 2°/s, the region filter algorithm can effectively improve the SNR of a blurred star image. In restored images, the error of star centroid is less than 0.1 pixels, which can satisfy the requirements for star sensor of high centroid accuracy.
-
Key words:
- star sensor /
- motion blur /
- region filter /
- image restoration
-

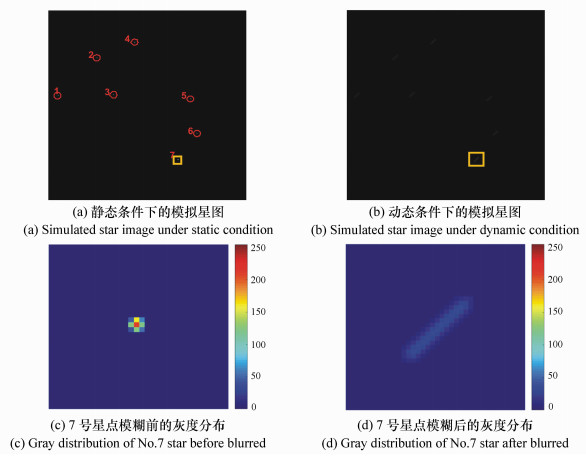
图 4 静态和动态条件下的模拟星图及其灰度分布
Figure 4. Simulated star images and gray distribution under static and dynamic conditions

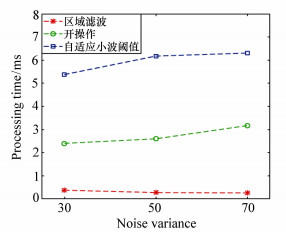
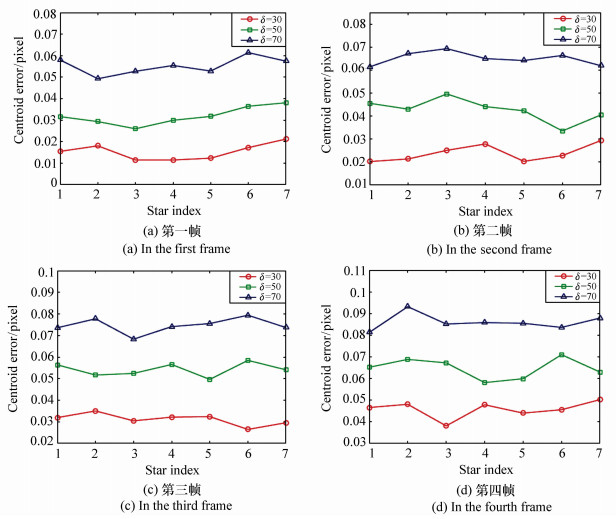
图 7 去噪算法在不同噪声方差条件下对应的星点的质心偏差
Figure 7. Star centroid error for different methods under various noise variances

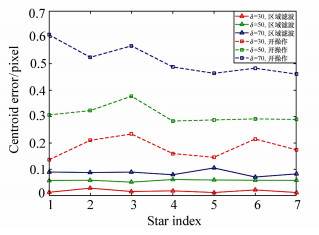
图 8 角速度变化条件下星点的质心偏差
Figure 8. Star centroid errors under conditions of variable angular velocity
表 1 星敏感器参数
Table 1. Parameters of star sensor
编号 性能指标 参数 1 视场/(°) 5×5 2 焦距/mm 60 3 分辨率 512×512 4 积分时间/ms 60 5 探测灵敏度/Mv +6.5  下载: 导出CSV
下载: 导出CSV
表 2 去噪算法在不同噪声方差下的峰值信噪比
Table 2. PSNRs for different denoising methods with various noise variances
噪声方差 噪声图像 自适应小波阈值 开操作 区域滤波 30 28.529 38.902 53.004 63.191 50 27.933 36.497 48.780 60.539 70 27.634 34.900 46.379 58.129
下载: 导出CSV
表 3 复原星图中星点的质心坐标
Table 3. Star centroid coordinates in restored star image
星点编号 质心坐标真值/pixel 开操作/pixel 区域滤波/pixel 1 (229.993 8, 26.014 4) (230.072 6, 25.957 0) (230.005 3, 26.015 9) 2 (128.128 4, 126.016 6) (128.189 2, 125.867 5) (128.117 3, 126.034 0) 3 (228.022 5, 169.090 1) (227.980 1, 169.281 5) (228.030 1, 169.098 4) 4 (86.018 2, 223.948 3) (85.985 4, 224.075 2) (86.032 8, 223.952 0) 5 (239.087 0, 368.965 6) (239.000 0, 369.024 1) (239.093 6, 368.960 1) 6 (332.005 8, 384.940 0) (331.879 4, 385.028 5) (332.002 2, 384.921 9) 7 (402.950 1, 336.028 7) (402.985 9, 336.166 7) (402.942 6, 336.024 1)
下载: 导出CSV
表 4 星敏感器的角速度
Table 4. Angular velocities of star sensor
角速度矢量编号 x轴 y轴 z轴 A 0.309 3 0.411 0 0.266 4 B 0.838 5 0.919 3 0.648 3 C 1.407 4 1.452 9 1.063 5 D 1.856 4 1.902 1 1.639 3
下载: 导出CSV
-
[1] 房建成, 宁晓琳, 田玉龙.航天器自主天文导航原理与方法[M].北京:国防工业出版社, 2006.FANG J CH, NING X L, TIAN Y L. Spacecraft Autonomous Celestial Navigation Principles and Methods[M]. Beijing:National Defense Industry Press, 2006.(in Chinese) [2] 郭敬明, 赵金宇, 何昕, 等.船载高精度星敏感器安装角的标定[J].光学 精密工程, 2016, 24(3):609-615. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201603019GUO J M, ZHAO J Y, HE X, et al.. Calibration of installation angle for high accuracy shipboard star sensor[J]. Opt. Precision Eng., 2016, 24(3):609-615.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201603019 [3] 孙刚, 杨再华, 万毕乐, 等."高分二号"上相机和星敏感器相对安装姿态的测量[J].光学 精密工程, 2017, 25(11):2931-2938. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201711020SUN G, YANG Z H, WAN B L, et al.. High precision automatic measurement for alignment of camera and star-sensor in GF-2[J]. Opt. Precision Eng., 2017, 25(11):2931-2938.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201711020 [4] 张磊, 何昕, 魏仲慧, 等.基于千兆网接口的星敏感器图像显示与存储[J].液晶与显示, 2015, 30(1):114-119. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201501018ZHANG L, HE X, WEI ZH H, et al.. Image display and storage of star sensor based on Gigabit Ethernet[J]. Chinese Journal of Liquid Crystals and Displays, 2015, 30(1):114-119.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201501018 [5] 孙宏海, 何舒文, 吴培, 等.高动态科学级CMOS相机设计与成像分析[J].液晶与显示, 2017, 32(3):240-248. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201703012SUN H H, HE SH W, WU P, et al.. Design and imaging analysis of high dynamics scientific CMOS camera[J]. Chinese Journal of Liquid Crystals and Displays, 2017, 32(3):240-248.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201703012 [6] 郭敬明, 刘冰, 何昕, 等.基于高精度星敏感器的船载雷达海上精度鉴定[J].光学 精密工程, 2017, 25(7):1909-1918. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201707027GUO J M, LIU B, HE X, et al.. Maritime precision appraisal for ship-borne radar based on high-precision star sensor[J]. Opt. Precision Eng., 2017, 25(7):1909-1918.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201707027 [7] 梁斌, 朱海龙, 张涛, 等.星敏感器技术研究现状及发展趋势[J].中国光学, 2016, 9(1):16-29. http://www.chineseoptics.net.cn/CN/abstract/abstract9384.shtmlLIANG B, ZHU H L, ZHANG T, et al.. Research status and development tendency of star tracker technique[J]. Chinese Optics, 2016, 9(1):16-29.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9384.shtml [8] VAN BEZOOIJEN R W H. SIRTF autonomous star tracker[J]. Proceedings of SPIE, 2003, 4850:108-121. doi: 10.1117/12.461606 [9] PASETTI A, HABINC S, CREASEY R C. Dynamical binning for high angular rate star tracking[C]. Proceedings of the 4th International Conference on Spacecraft Guidance, Navigation and Control Systems, ESTEC, 2000, 425: 255-266. [10] SUN T, XING F, YOU ZH, et al.. Smearing model and restoration of star image under conditions of variable angular velocity and long exposure time[J]. Optics Express, 2014, 22(5):6009-6024. doi: 10.1364/OE.22.006009 [11] RICHARDSON W H. Bayesian-based iterative method of image restoration[J]. Journal of the Optical Society of America, 1972, 62(1):55-59. doi: 10.1364/JOSA.62.000055 [12] LUCY L B. An iterative technique for the rectification of observed distributions[J]. The Astronomical Journal, 1974, 79(6):745-754. doi: 10.1086-111605/ [13] SUN T, XING F, YOU ZH, et al.. Deep coupling of star tracker and MEMS-gyro data under highly dynamic and long exposure conditions[J]. Measurement Science and Technology, 2014, 25(8):085003. doi: 10.1088/0957-0233/25/8/085003 [14] MA L H, BERNELLI-ZAZZERA F, JIANG G W, et al.. Region-confined restoration method for motion-blurred star image of the star sensor under dynamic conditions[J]. Applied Optics, 2016, 55(17):4621-4631. doi: 10.1364/AO.55.004621 [15] ZHANG W N, QUAN W, GUO L. Blurred star image processing for star sensors under dynamic conditions[J]. Sensors, 2012, 12(5):6712-6726. doi: 10.3390/s120506712 [16] SUN T, XING F, YOU ZH, et al.. Motion-blurred star acquisition method of the star tracker under high dynamic conditions[J]. Optics Express, 2013, 21(17):20096-20110. doi: 10.1364/OE.21.020096 [17] BALAS V E, JAIN L C, ZHAO X M. Information Technology and Intelligent Transportation Systems[M]. Switzerland:Springer, 2017. [18] 何家维. 高精度全天时星敏感器关键技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2013. http://cdmd.cnki.com.cn/Article/CDMD-80139-1013293674.htmHE J W. Study on the key technologies for high-accuracy and all-time star sensor[D]. Changchun: Graduate University of Chinese Academy of Sciences, 2013. (in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-80139-1013293674.htm [19] 金雁, 江洁, 张广军.高动态星体目标提取方法[J].红外与激光工程, 2011, 40(11):2281-2285. doi: 10.3969/j.issn.1007-2276.2011.11.041JIN Y, JIANG J, ZHANG G J. Star extraction method for high dynamic star sensor[J]. Infrared and Laser Engineering, 2011, 40(11):2281-2285.(in Chinese) doi: 10.3969/j.issn.1007-2276.2011.11.041 [20] ZHANG H, NIU Y X, LU J ZH, et al.. Accurate and autonomous star acquisition method for star sensor under complex conditions[J]. Mathematical Problems in Engineering, 2017(10):1643967. [21] GONZALEZ R C, WOODS R E. Digital Image Processing[M]. 3rd ed. Beijing:Publishing House of Electronics Industry, 2011. [22] 马丽衡. 星敏感器星点运动模糊机理与复原方法研究[D]. 长沙: 国防科学技术大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-90002-1015958688.htmMA L H. Research on the mechanism of star image motion blur and the methods of blurred star restoration of the star sensor[D]. Changsha: National University of Defense Technology, 2013. (in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-90002-1015958688.htm [23] 吴小娟, 王新龙.星图运动模糊及其复原方法[J].北京航空航天大学学报, 2011, 37(11):1338-1342. http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201111003.htmWU X J, WANG X L. Motion blur of star image and restoration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(11):1338-1342.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201111003.htm [24] JIANG J, YU W B, ZHANG G J. High-accuracy decoupling estimation of the systematic coordinate errors of an INS and intensified high dynamic star tracker based on the constrained least squares method[J]. Sensors, 2017, 17(10):2285. doi: 10.3390/s17102285 [25] 姜华, 杜博军, 董兴法, 等.基于北斗/惯导与多传感融合的无人机参数矫正方法研究[J].液晶与显示, 2017, 32(8):656-661. http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201708012.htmJIANG H, DU B J, DONG X F, et al.. Parameter correction of unmanned aerial vehicle based on beidou/inertial navigation and multi-sensor fusion[J]. Chinese Journal of Liquid Crystals and Displays, 2017, 32(8):656-661.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-YJYS201708012.htm -

 下载:
下载:


计量
- 文章访问数: 3167
- HTML全文浏览量: 1401
- PDF下载量: 223
- 被引次数: 0
