


Alignment error detection method of sub-eye mounting hole for bionic compound eye system
-
摘要: 仿生复眼系统是一种多子眼拼接的大视场高分辨率成像系统,由一级同心物镜和二级子眼镜头阵列组成。为实现大视场无缝隙拼接成像,必须严格保证所有子眼镜头的光轴与同心物镜球心的对准误差在光学设计允许的公差范围内。首先,基于PSM(point source microscope)定位仪的自准直原理确定PSM的基准参考零位,然后通过转接器将PSM分别固定在所有子眼镜头安装孔中,计算经同心物镜反射后像点质心位置与子眼安装孔轴线对准误差的几何关系式,最后用Lighttools软件仿真检测光路并对所有安装孔对准误差进行检测。实验结果表明:所有安装孔轴线与同心物镜球心的对准误差均小于30 μm。满足光学设计中子眼镜头光轴与同心物镜球心对准误差小于50 μm的公差要求,从而保证了仿生复眼成像系统大视场高分辨率无缝拼接影像的获取。Abstract: The bionic compound eye system is a multi-sub-eye imaging system with large-field and high-resolution, which consists of a monocentric objective lens and sub-eye lens array.In order to achieve large-field seamless stitching images, it must be strictly ensured that the sub-eye optical axes are properly aligned to the center of monocentric objective lens such that the alignment error is within the tolerances of the optical design. First, the reference zero position of PSM was determined based on the auto-collimation principle. Then the PSM was fixed to all the sub-eye mounting holes with the adapter. A geometric equation for the relationship between the distance of image centroid after reflection by the monocentric objective lens relative to the reference zero point and the alignment error of the sub-eye mounting holes was calculated. Finally, the optical detection system was simulated with Lighttools and the alignment errors of all the mounting holes were detected. Experimental results indicate that the alignment errors of all the mounting holes are less than 30 μm. It can satisfy the optical tolerance requirements of less than 50 μm, which ensures the acquisition of large-field and high-resolution seamless stitching images of bionic compound eye imaging systems.
-
Key words:
- bionic compound eye /
- large-field /
- high-resolution /
- auto-collimation /
- alignment error
-

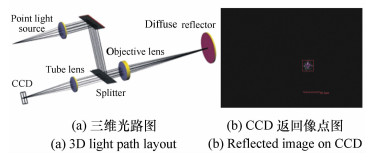
图 4 基准零位仿真及实际返回像点图
Figure 4. Diagram of reference zero position simulation and real reflected image

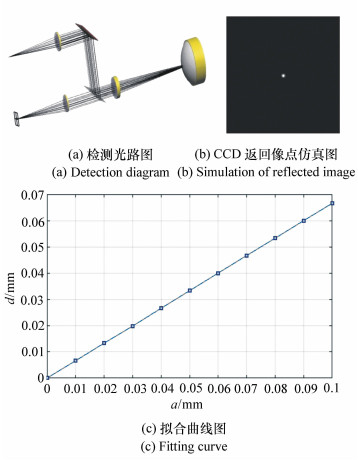
图 5 子眼镜头安装孔对准误差与返回像点偏离量关系图
Figure 5. Diagram of relationship between alignment error of sub-eye mounting holes and deviation of reflected image

图 7 子眼镜头安装孔对准误差检测实验
Figure 7. Alignment error detection experiment of sub-eye mounting holes

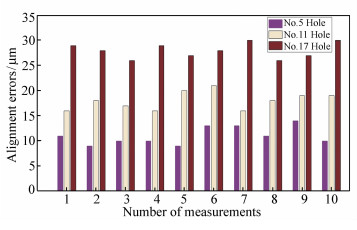
图 8 5、11、17号安装孔对准误差多次检测结果
Figure 8. Detection results of alignment error for NO.5、11、17 mounting holes

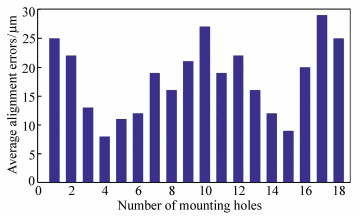
图 9 18个安装孔位置对准误差平均检测结果
Figure 9. Detection results of average alignment error for 18 mounting holes
-
[1] MARKS D L, SON H S, KIM J, et al.. Engineering a gigapixel monocentric multiscale camera[J]. Optical Engineering, 2012, 51(8):083202. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=51d58504269dcb9b1e9eebb92433b621 [2] BRADY D J, GEHM M E, STACK R A, et al.. Multiscale gigapixel photography[J]. Nature, 2012, 486(7403):386-389. doi: 10.1038/nature11150 [3] 庄绪霞, 阮宁娟, 贺金平, 等.多尺度大视场十亿像素成像技术[J].航天返回与遥感, 2014, 35(5):1-8. doi: 10.3969/j.issn.1009-8518.2014.05.001ZHUANG X X, RUAN N J, HE J P, et al.. Multiscale wide field-of-view gigapixel imaging technique[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(5):1-8.(in Chinese) doi: 10.3969/j.issn.1009-8518.2014.05.001 [4] 王玉伟.仿生复眼全景立体成像关键技术研究[D].合肥: 中国科学技术大学, 2017.WANG Y W. Research on key technologies of bionic compound eye for panoramic stereo imaging[D]. Hefei: University of Science and Technology of China, 2017(in Chinese) [5] 吴雄雄, 王晓蕊, 袁影, 等.同心多尺度成像模式下的高分辨子成像系统设计[J].光学 精密工程, 2016, 24(11):2644-2650. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201611004WU X X, WANG X R, YUAN Y, et al.. Design of sub-imaging system based on monocentric multiscale dual resolution imaging[J]. Opt. Precision Eng., 2016, 24(11):2644-2650.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201611004 [6] 付跃刚, 赵宇, 刘智颖, 等.基于视场拼接方法的仿生复眼光学系统设计[J].仪器仪表学报, 2015, 36(2):422-429. http://d.old.wanfangdata.com.cn/Periodical/yqyb201502022FU Y G, ZHAO Y, LIU ZH Y, et al.. Design of the bionic compound eye optical system based on field splicing method[J]. Chinese Journal of Scientific Instrument, 2015, 36(2):422-429.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yqyb201502022 [7] 谭雪春, 武志超, 梁柱.仿生复眼接收系统设计与实验[J].光学 精密工程, 2011, 19(5):992-997. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201105008TAN X CH, WU ZH CH, LIANG ZH. Design and experiment of artificial compound eye receiving system[J]. Opt. Precision Eng., 2011, 19(5):992-997.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201105008 [8] 张国雄.三坐标测量机[M].天津:天津大学出版社, 1999.ZHANG G X. Coordinate Measuring Machines[M]. Tianjin:Tianjin University Press, 1999.(in Chinese) [9] 豆永坤.基于机器视觉的机械零件几何外形检测研究[D].兰州: 兰州理工大学, 2018. http://cdmd.cnki.com.cn/Article/CDMD-10731-1018956024.htmDOU Y K. Research on geometrical inspection of mechanical parts based on machine vision[D]. Lanzhou: Lanzhou University of Technology, 2018.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10731-1018956024.htm [10] 田钰麒, 高天元, 赵宇, 等.仿生复眼成像系统角度误差[J].红外与激光工程, 2018, 47(3):0310001. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201803008TIAN Y Q, GAO T Y, ZHAO Y, et al.. Angle error of bionic compound eye imaging system[J]. Infrared and Laser Engineering, 2018, 47(3):0310001.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201803008 [11] PARKS R E, KUHN W P. Optical alignment using the point source microscope[J]. Proceedings of SPIE, 2005, 5877:58770B. [12] 刘尧夫.激光三角法传感技术应用研究[D].天津: 天津大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10056-1018059039.htmLIU Y F. Research and application of laser triangulation sensing technology[D]. Tianjin: Tianjin University, 2017.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10056-1018059039.htm [13] 颜敏炜, 张英杰, 代博超, 等.采用激光传感器的同轴度检测技术研究[J].西安交通大学学报, 2017, 51(10):27-32. http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb201710005YAN M W, ZHANG Y J, DAI B CH, et al.. Research on coaxiality detection technology based on laser sensor[J]. Journal of Xi'an Jiaotong University, 2017, 51(10):27-32.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb201710005 [14] 赵菲菲, 黄玮, 许伟才, 等.Shack-Hartmann波前传感器质心探测的优化方法[J].红外与激光工程, 2014, 43(9):3005-3009. doi: 10.3969/j.issn.1007-2276.2014.09.038ZHAO F F, HUANG W, XU W C, et al.. Optimization method for the centroid sensing of Shack-Hartmann wavefront sensor[J]. Infrared and Laser Engineering, 2014, 43(9):3005-3009.(in Chinese) doi: 10.3969/j.issn.1007-2276.2014.09.038 [15] 费业泰.误差理论与数据处理[M].6版.北京:机械工业出版社, 2010.FEI Y T. Error Theory and Data Analysis[M]. 6th ed. Beijing:China Machine Press, 2010.(in Chinese) -

 下载:
下载:



计量
- 文章访问数: 2832
- HTML全文浏览量: 1156
- PDF下载量: 72
- 被引次数: 0
