


Ground calibration method for distance parameters of satellite-borne laser altimeter
-
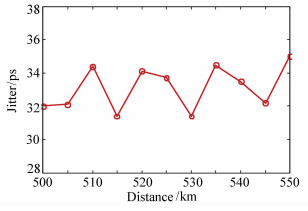
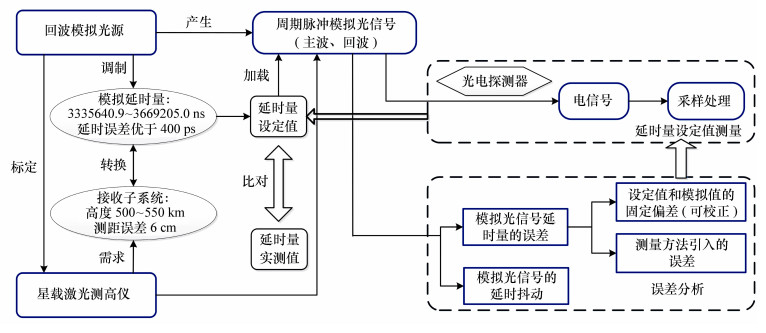
摘要: 星载激光测高仪接收系统通过收集地表反射的回波信号,反演卫星与地表的高度。本文提出一种回波模拟光源方法,产生延时量可调的激光主波和回波周期脉冲信号作为接收系统的检校输入源,对星载激光测高仪距离参数进行地面标定。首先,采用主波与回波光电探测器互换的测量方法,利用频率计数器对回波模拟光源的延时量设定值进行精确测量,测量方法误差为113 ps。然后,通过比对回波模拟光源调制的延时量设定值和接收系统测试获取的延时量实测值,实现对测高误差的标定和校正。研制了一套回波模拟光源系统,通过3 335 640.9~3 669 205.0 ns的延时量调制,实现对500~550 km高度的精确模拟,模拟延时信号的抖动量为34.5 ps,延时偏差小于118 ps,为百千米级星载激光测高仪提供了高程误差优于6 cm的地面检校能力。Abstract: Satellite-borne laser altimeter measures the distance between a satellite and the earth through processing a laser echo signal collected by its receiving module. A laser echo simulation model for the ground-based distance parameter calibration of satellite-borne laser altimeter is proposed, in which the emission laser pulse and the returned laser pulse with an adjustable time-delay are generated. First, the time-delay value set in the laser echo simulation system was precisely measured by swapping two photodetectors and using a frequency counter, and the measurement error was 113 ps. The calibration of the elevation error is realized by comparing the time-delay set value and the time-delay value obtained in the receiving system. A laser echo simulation system is developed that offers distance simulation ability from 500 km to 550 km with a jitter of 34.5 ps by setting the periodic time-delay from 3 335 640.9 ns to 3 669 205.0 ns. The time-delay accuracy of the laser echo simulation system for the satellite-borne laser altimeter is better than 118 ps and the system can provide a calibration capability better than 6 cm in the range of hundreds of kilometers.
-
Key words:
- satellite laser altimeter /
- ground calibration /
- time-delay /
- elevation error
-

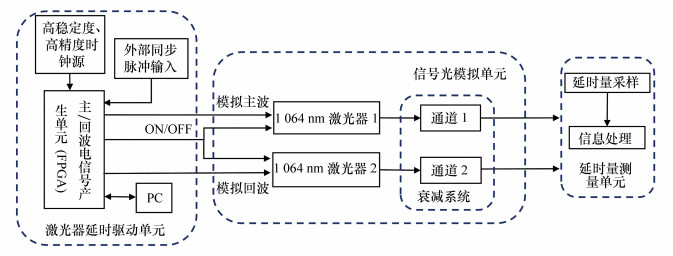
图 1 星载激光测高仪距离参数地面标定方法原理图
Figure 1. Schematic of the ground calibration method for distance parameter of satellite laser altimeter

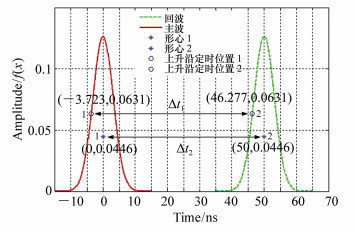
图 2 电信号延时量的两种测量方法结果对比
Figure 2. Comparison of electrical signal time-delay values obtained by two measurement methods

图 3 主波与回波光电探测器互换的高精度延时测量方法流程
Figure 3. Measurement procedure of the time-delay between the emission laser pulse and the returned laser pulse by swapping two photodetectors
表 1 频率计数器测量误差分析(单位:ps)
Table 1. Measurement error analysis of frequency counter(Unit: ps)
频率计数器(外接氢钟) u1 u2 u3 u4 u 误差 0.001 5 100 16.7 50 113  下载: 导出CSV
下载: 导出CSV
表 2 标定系统及测量设备主要性能指标
Table 2. Main performance indicators of calibration system and measurement equipment
回波模拟光源 中心波长:1 064 nm 脉宽:10~150 ns 重复频率:1 Hz~1 kHz 峰值功率:10-8~10-4 W 光电探测器(型号TIA-525) 光功率探测范围:3.2×10-5~3.2×10-3 W 输出电压范围:2~4 V 带宽(-3 dB):DC to 125 MHz 频率计数器(型号53230A,外接氢钟) 时基稳定度:5×10-13 时间分辨率:20 ps 时间测量分辨力误差:100 ps 两通道间的压摆率误差:50 ps
下载: 导出CSV
-
[1] 周辉, 李松, 王良训, 等.噪声对星载激光测高仪测距误差的影响[J].红外与激光工程, 2015, 44(8):2256-2261. doi: 10.3969/j.issn.1007-2276.2015.08.004ZHOU H, LI S, WANG L X, et al.. Influence of noise on range error for satellite laser altimeter[J]. Infrared and Laser Engineering, 2015, 44(8):2256-2261.(in Chinese) doi: 10.3969/j.issn.1007-2276.2015.08.004 [2] PALOJARVI P. Integrated electronic and optoelectronic circuits and devices for pulsed time-of-flight laser range-finding[D]. Oulu: University of Oulu, 2003. [3] 马跃, 李松, 阳凡林, 等.激光测高仪平顶高斯光束条件下的回波参数模型[J].中国激光, 2015, 42(4):0413002. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201504041MA Y, LI S, YANG F L, et al.. Model of waveform parameters for laser altimeter system under flattened Gaussian beams[J]. Chinese Journal of Lasers, 2015, 42(4):0413002.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjg201504041 [4] 孙杰, 潘继飞.高精度时间间隔测量方法综述[J].计算机测量与控制, 2007, 15(2):145-148. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz200702002SUN J, PAN J F. Methods of high precision time-interval measurement[J]. Computer Measurement & Control, 2007, 15(2):145-148.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz200702002 [5] 黄科, 李松, 马跃, 等.单光子激光测距的漂移误差理论模型及补偿方法[J].物理学报, 2018, 67(6):064205. http://d.old.wanfangdata.com.cn/Periodical/wlxb201806016HUANG K, LI S, MA Y, et al.. Theoretical model and correction method of range walk error for single-photon laser ranging[J]. Acta Physica Sinica, 2018, 67(6):064205.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/wlxb201806016 [6] RINNE E, SHEPHERD A, MUIR A, et al.. A comparison of recent elevation change estimates of the Devon ice cap was measured by the ICESat and EnviSAT satellite altimeters[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6):1902-1910. doi: 10.1109/TGRS.2010.2096472 [7] 马跃, 李松, 周辉, 等.系统参数对激光测高仪海洋测距和回波脉宽影响[J].光学 精密工程, 2013, 21(3):813-820. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201303036MA Y, LI S, ZHOU H, et al.. Effect of system parameters on ranging and pulse width in ocean satellite laser altimeter system[J]. Opt. Precision Eng., 2013, 21(3):813-820.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201303036 [8] MUSS J D, AGUILAR-AMUCHASTEGUI N, MLADENOFF D J, et al.. Analysis of waveform Lidar data using shape-based metrics[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(1):106-110. doi: 10.1109/LGRS.2012.2194472 [9] 程鹏飞.大动态范围高精度激光测距关键技术研究[D].上海: 中国科学院研究生院(上海技术物理研究所), 2014. http://cdmd.cnki.com.cn/Article/CDMD-80143-1014066399.htmCHENG P F. Research of key technologies of wide dynamic range and high precision laser distance measurement[D]. Shanghai: Shanghai Institute of Technical Physics of the Chinese Academy of Sciences, 2014.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-80143-1014066399.htm [10] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会.GB/T 9317-2012脉冲信号发生器通用规范[S].北京: 中国标准出版社, 2013.General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of China. GB/T 9317-2012 General specification for pulse signal generator[S]. Beijing: China Standard Press, 2013.(in Chinese) [11] 中华人民共和国国家质量监督检验检疫总局.JJG 723-2008时间间隔发生器检定规程[S].北京: 中国标准出版社, 2008.General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China. JJG 723-2008 Verification regulation of time interval generator[S]. Beijing: China Standard Press, 2008.(in Chinese) [12] 国防科学技术委员会.GJB 2241.2-2006脉冲激光测距仪性能试验方法第2部分: 静态最大测程、最小测程、测距精度和回波率试验[S].北京: 中国标准出版社, 2007.National Defense Science and Technology Commission. GJB 2241.2-2006 Test method of performance for pulsed laser rangefinders Part 2: static test of maximum ranging, minimum ranging, range accuracy and echo ratio[S]. Beijing: China Standard Press, 2007.(in Chinese) [13] Agilent 53200A系列射频/通用频率计数器/计时器技术资料[EB/OL].2010.Agilent 53200A Series RF and universal counter/timers product data[EB/OL]. 2010 Edition.(in Chinese) [14] 陈彦超, 冯永革, 张献兵.用于半导体激光器的大电流纳秒级窄脉冲驱动电路[J].光学 精密工程, 2014, 22(11):3145-3151. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201411035 [15] 孟耀勇, 张月清, 武胜利.F-P半导体激光放大器弱信号机制下的增益特性研究[J].发光学报, 1991, 12(4):318-324. doi: 10.3321/j.issn:1000-7032.1991.04.008MENG Y Y, ZHANG Y Q, WU SH L. Study on gain characteristic of fabry-perot type semiconductor laser amplifier under weak signal regime[J]. Chinese Journal of Luminescence, 1991, 12(4):318-324.(in Chinese) doi: 10.3321/j.issn:1000-7032.1991.04.008 [16] 王立军, 宁永强, 秦莉, 等.大功率半导体激光器研究进展[J].发光学报, 2015, 36(1):1-19. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201805003WANG L J, NING Y Q, QIN L, et al.. Development of high power diode laser[J]. Chinese Journal of Luminescence, 2015, 36(1):1-19.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201805003 [17] 李松, 周辉, 石岩, 等.激光测高仪的回波信号理论模型[J].光学 精密工程, 2007, 15(1):33-39. doi: 10.3321/j.issn:1004-924X.2007.01.006LI S, ZHOU H, SHI Y, et al.. Theoretical model for return signal of laser altimeter[J]. Opt. Precision Eng., 2007, 15(1):33-39.(in Chinese) doi: 10.3321/j.issn:1004-924X.2007.01.006 -

 下载:
下载:



计量
- 文章访问数: 1695
- HTML全文浏览量: 533
- PDF下载量: 111
- 被引次数: 0
