


-
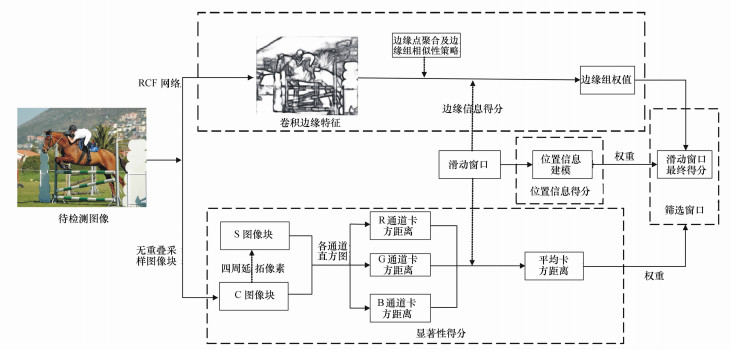
摘要: 在目标检测中,通常使用候选区域提高目标的检测效率。为解决当前候选区域质量较低的问题,本文将卷积边缘特征、显著性及目标位置信息引入到候选区域算法中。首先,利用卷积神经网络将待检测图像生成更富有语义信息的边缘特征,并通过边缘点聚合及边缘组相似性策略,获取每个滑动窗口的边缘信息得分;其次,利用显著性目标的局部特征,统计每个滑动窗口中的目标显著性得分;第三,根据目标可能出现的位置,计算每个滑动窗口中的目标位置信息得分;最后,利用边缘信息、显著性及位置信息的分数确定候选区域。在PASCAL VOC 2007验证集上进行实验,给定10 000个候选区域,交并比取0.7时,所提算法的召回率为90.50%,较Edge Boxes算法提高了3%。每张图像的运行时间大约为0.76 s。结果表明,本文算法可快速产生较高质量的候选区域。Abstract: Region proposals are usually used to efficiently detect objects in object detection. In order to solve the problem that the region proposals have low quality, the convolutional edge features, object saliency and position information of objects are introduced into the region proposals algorithm. Firstly, the edge features with semantically meaningful information are generated from the images to be detected using the convolutional neural networks, and the score of edge information for per sliding window is obtained through the strategy of edge clustering and the similarities between the edge groups. Then, the salient object scores of each sliding window are computed using the local features of salient objects. Thirdly, the scores of object position information are calculated according to the location where objects may occur. Finally, the region proposals are determined by three components including edge information scores, salient object scores and the object positions scores. The experimental results in PASCAL VOC 2007 validation set show that given just 10 000 region proposals, the object recall of the proposed algorithm is 90.50%, that is increased by 3% comparing with Edge Boxes with intersection over union threshold of 0.7. The run time of the proposed method is about 0.76 seconds for processing one image, and this demonstrates that our approach can yield a set of region proposals with higher quality at a fast speed.
-
Key words:
- computer vision /
- object detection /
- region proposals /
- convolutional neural networks /
- salient object
-
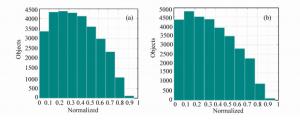
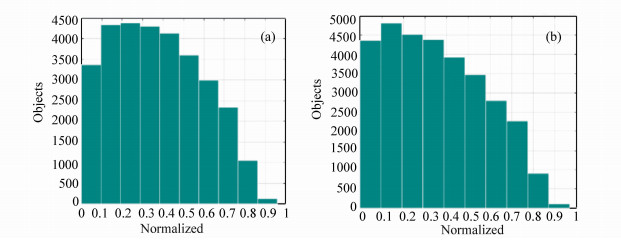
图 7 目标位置与目标数目关系。(a)VOC 2007数据集;(b)VOC 2012数据集
Figure 7. Relationship between the object′s location and object′s number. (a) VOC 2007 dataset; (b) VOC 2012 dataset
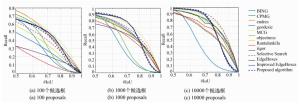
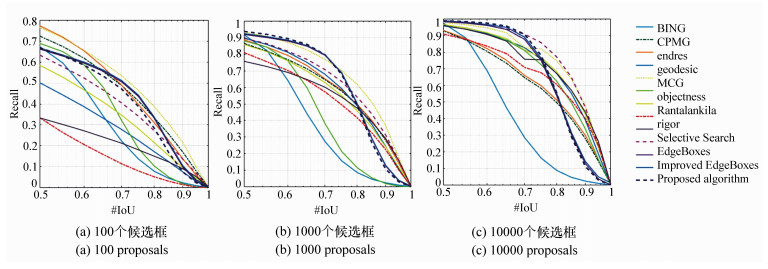
图 10 不同候选框数下召回率与交并比之间的关系
Figure 10. Relationship between recall and IoU at different number of proposals
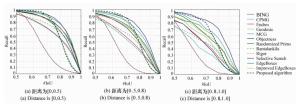
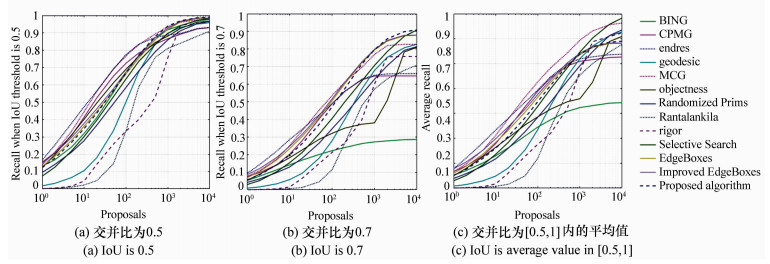
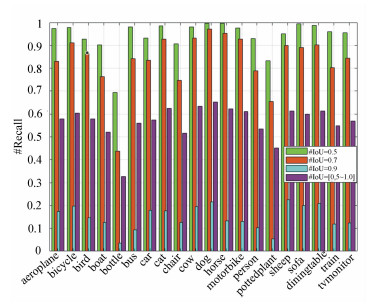
图 12 13种算法不同位置目标的召回率与交并比的关系
Figure 12. Recall vs IoU curves of objects at different locations by 13 kinds of algorithms
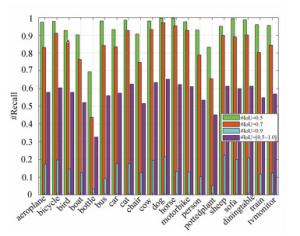
图 14 本文算法在PASCAL VOC 2007测试集的召回率
Figure 14. Recall on the PASCAL VOC 2007 test set for proposed algorithm in this paper
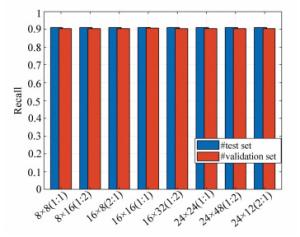
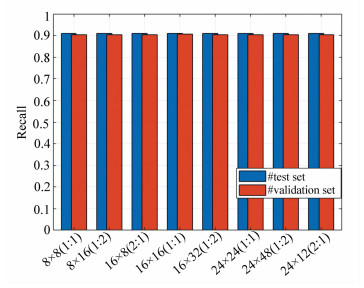
图 15 不同宽高比时测试集及验证集上的召回率
Figure 15. The recalls at different aspect ratios of test set and validation set
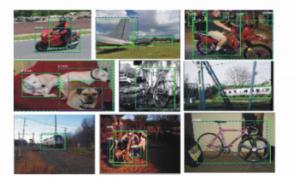
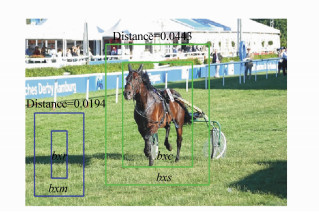
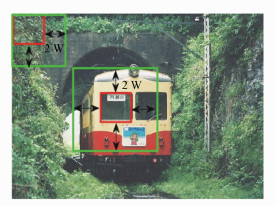
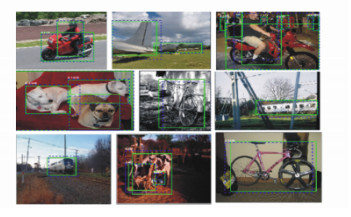
图 16 所提算法对部分目标的检测结果
Figure 16. Object detection results of some objects detected by proposed algorithm
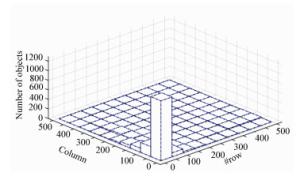
图 17 漏检目标的尺寸与漏检目标数目间的关系
Figure 17. The relation of the size of undetected objects and the number of undetected objects
表 3 VOC 2007数据集特性
Table 3. The properties of VOC 2007 dataset
数据集 训练集 验证集 测试集 图像数 2 501 2 510 4 952 目标数 6 301 6 307 12 032  下载: 导出CSV
下载: 导出CSV
表 4 交并比为0.7时13种算法的实验结果
Table 4. The experiment results of 13 kinds of algorithms with IoU of 0.7
Algorithms AUC 45% 60% 75% R1000 R2000 R10000 mAP t/s Object-ness 0.27 -- -- -- 37.68% 37.89% 37.93% 51.4 3 BING 0.20 -- -- -- 27.04% 27.39% 28.14% 49.0 0.2 CPMC 0.41 86 475 -- 62.58% 62.59% 62.60% 57.1 250 SS 0.40 171 530 1 812 68.13% 76.13% 89.12% 59.5 10 EB 0.46 77 234 804 77.39% 83.25% 87.19% 60.4 0.25 Rantalankila 0.23 489 1 712 -- 55.79% 61.21% 68.94% 57.9 10 Rand. Prim′s 0.35 274 950 4 095 60.61% 68.52% 79.33% 57.6 1 MCG 0.48 60 240 1 116 74.14% 79.58% 80.53% 60.3 30 Endres 0.44 75 432 -- 63.93% 64.69% 64.88% 57.4 100 Geodesic 0.35 266 630 2 491 66.45% 73.65% 81.05% 57.5 1 Rigor 0.30 600 997 1 948 60.08% 75.59% 75.77% 58.4 10 Improved EdgeBoxes 0.46 80 265 802 77.50% 84.15% 89.25% 60.8 0.43 本文算法 0.47 103 276 799 77.87% 84.73% 90.50% 61.3 0.764 9
下载: 导出CSV
-
[1] 梁华, 宋玉龙, 钱锋, 等.基于深度学习的航空对地小目标检测[J].液晶与显示, 2018, 33(9):793-800. http://d.old.wanfangdata.com.cn/Periodical/yjyxs201809011LIANG H, SONG Y L, QIAN F, et al.. Detection of small target in aerial photography based on deep learning[J]. Chinese Journal of Liquid Crystals and Displays, 2018, 33(9):793-800.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yjyxs201809011 [2] 李艳荻, 徐熙平.基于超像素时空特征的视频显著性检测方法[J].光学学报, 2019, 39(1):1-8. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxxb201901025LI Y D, X X P. Video saliency detection method based on spatiotemporal features of superpixels[J]. Acta Optica Sinica, 2019, 39(01):1-8.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=gxxb201901025 [3] FATTAL A, KARG M, SCHARFENBERGER C, et al.. Saliency-guided region proposal network for CNN based object detection[C]. IEEE Conference on Intelligent Transportation Systems, Yokohama, Japan.2017: 1-8. [4] UIJLINGS J, K VAN DE SANDE, GEVERS T, et al.. Selective search for object recognition[J]. International Journal of Computer Vision, 2013, 104(2):154-171. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3216de1927eb16418ad3bdf8d4bcd8bd [5] ALEXE B, DESELAERS T, FERRARI V. Measuring the objectness of image windows[J]. IEEE Transactions on Software Engineering, 2012, 34(11):2189-2202. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201605006 [6] CHENG M M, LIU Y, LIN W Y, et al.. BING: Binarized Normed Gradients for Objectness Estimation at 300fps[C]. 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, OH, USA.2014(1): 3286-3293. [7] ZITNICK C L, DOLLAR P. Edge boxes: locating object proposals from edges[C]. Proceedings of 13th European Conference on Computer Vision. Zurich, Switzerland, 2014, 8689: 391-405. [8] JIANG S, LIANG S, CHEN C, et al.. Class agnostic image common object detection[J]. EEE Transactions on Image Processing, 2019, 28(6):2836-2846. [9] HE K M, GEORGIA G, PIOTR D, et al.. Mask R-CNN[C]. 2017 IEEE International Conference on Computer Vision, Venice, Italy. 2017, (1): 2980-2988. [10] 丁鹏, 张叶, 贾平, 等.基于视觉显著性的海面舰船检测技术[J].电子学报, 2018, 46(1):127-134. http://d.old.wanfangdata.com.cn/Periodical/dianzixb201801018DING P, ZHANG Y, JIA P, et al.. Ship detection on sea surface based on visual saliency[J]. Acta Electronica Sinica, 2018, 46(1):127-134.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/dianzixb201801018 [11] 李宇, 刘雪莹, 张洪群, 等.基于卷积神经网络的光学遥感图像检索[J].光学 精密工程, 2018, 26(1):200-207. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201801024LI Y, LIU X Y, ZHANG H Q, et al.. Optical remote sensing image retrieval based on convolutional neural networks[J]. Opt. Precision Eng., 2018, 26(1):200-207.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201801024 [12] LIU Y, CHENG M M, HU X W, et al. Richer convolutional features for edge detection[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition.Honolulu, Hawaii, USA.2017, (1): 5872-5881. [13] ISHIKURA K, KURITA N, CHANDLER D M, et al.. Saliency detection based on multiscale extrema of local perceptual color differences[J]. IEEE Transactions on Image Processing, 2018, 27(2):703-717. [14] KUANG P J, ZHOU Z H, WU D C. Improved edge boxes with object saliency and location awards[J]. IEICT Transactions on Information and Systems, 2016, E99D(2):488-495. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=J-STAGE_2188038 [15] CARREIRA J, SMINCHISESCU C. CPMC:automatic object segmentation using constrained parametric min-cuts[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7):1312-1328. http://d.old.wanfangdata.com.cn/Periodical/xlyj200906002 [16] 邝沛江.基于改进Edge Boxes的物体检测算法的研究[D].广州: 华南理工大学, 2017KUANG P J. Research on algorithm in object detection based on improved edge boxes[D]. Guangzhou: South China University of Technology, 2017.(in Chinese) [17] MANEN S, GUILLAUMIN M, VAN GOOL L. Prime object proposals with randomized prim's algorithm[C]. Proceedings of the 2013 IEEE International Conference on Computer Vision. Sydney, NSW, Australia. 2013: 2536-2543. [18] RANTALANKILA P, KANNALA J, RAHTU E. Generating object segmentation proposals using global and local search[C]. 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, OH, USA.2014: 2417-2424. [19] PONT-TUSET J, ARBELAEZ P, BARRON J T, et al.. Multiscale combinatorial grouping for image segmentation and object proposal generation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(1):128-140. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=303f23167a0a55805d66a6d951514dca [20] ENDRES I, HOIEM D. Category-independent object proposals with diverse ranking[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(2):222-234. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=004584be68a696c66a884743028962f0 [21] PHILIPP KRAHENBUHL, KOLTUN V. Geodesic object proposals[C]. 2014 European Conference on Computer Vision. Zurich, Switzerland, 2014: 725-739. [22] HUMAYUN A, LI F, REHG J M. Rigor: recycling inference in graph cuts for generating object regions[C]. 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA. 2014: 2417-2424. [23] DANELLJAN M, HÄGER G, KHAN F S, et al.. Convolutional features for correlation filter based visual tracking[C]. IEEE International Conference on Computer Vision Workshop, Santiago, Chile. 2015: 621-629. [24] HOSANG J, BENENSON R, DOLLÁR P, et al.. What makes for effective detection proposals[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 38(4):814-830. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=14eeeed4ff44e76fe35c0417c1062ae5 -

 下载:
下载:








计量
- 文章访问数: 2789
- HTML全文浏览量: 1339
- PDF下载量: 63
- 被引次数: 0
