


-
摘要: 星载激光雷达是实现海洋垂直剖面探测的有效工具,也是目前迫切需求的海洋光学遥感手段。对星载海洋激光雷达的波长参数进行评估对保证探测有效性具有重要意义。本文从探测深度和信噪比两方面分析了星载海洋激光雷达探测全球海洋的最佳波长。利用MODIS 10个波段的水体光学特性数据,估算全球海水探测深度及相应的最优波长;并根据太阳夫琅禾费暗线特性,对信号信噪比进行优化。结果表明:在探测深度方面,最优探测波长在488 nm波段的海洋占全球海洋面积的70%左右,并且全球95%以上的海域在488 nm波段的探测深度优于0.8倍的真光层深度;在信噪比方面,相对于488 nm波段,486.134 nm夫琅禾费暗线处采用0.1 nm带宽的滤光片可以将背景光强度降低70%,相应地回波信噪比整体提升了约5.0%。就全球海洋探测来说,使用486.134 nm作为探测波长可以提高探测深度,有效抑制太阳背景光,提高信噪比,因此,486.134 nm是星载海洋激光雷达的最佳工作波长。Abstract: Spaceborne lidar is a promising tool for vertical ocean profile detection, which has attracted extensive attention in oceanic optical remote sensing technology. It is essential to evaluate the operating wavelength of spaceborne oceanic lidar to ensure that it is effective. In this paper, the optimal operating wavelength of spaceborne oceanic lidar for the purposes of global ocean detection was analyzed in terms of detection depth and signal-to-noise ratio (SNR). The global distribution of ocean detection depths and the corresponding wavelengths were estimated by using the oceanic optical properties data from MODIS. The SNR was evaluated based on the characteristics of the solar Fraunhofer line. It was found that ocean water with an optimal wavelength of 488 nm accounts for about 70% of the global ocean area and more than 95% of the global ocean area has a detected depth deeper than 0.8 times the depth of the euphotic layer. Furthermore, 70% of background light can be suppressed with a filter against the 0.1 nm bandwidth at the 486.134 nm solar Fraunhofer line and the SNR can be increased by about 5.0% compared to that of the 488 nm. In conclusion, working at 486.134 nm can effectively improve the detection depth and the SNR, so it is the optimal operating wavelength of spaceborne oceanic lidar.
-

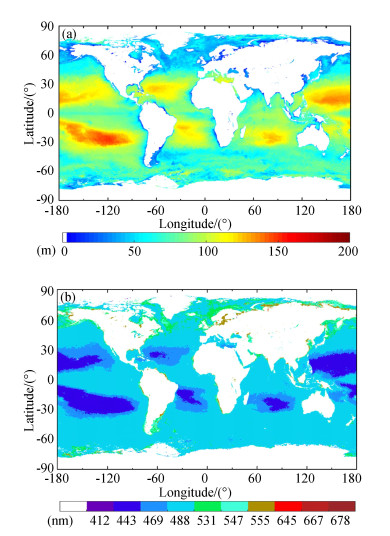
图 1 星载激光雷达海洋探测深度(a)和所对应的最佳探测波长的全球分布(b)
Figure 1. (a) Ocean detection depth of spaceborne lidar and (b) global distribution of corresponding optimal operating wavelengths
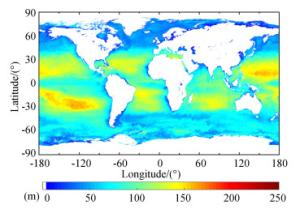
图 2 年平均海洋真光层深度的全球分布
Figure 2. Global distribution of the annual mean ocean euphotic depth
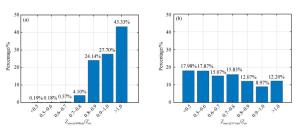
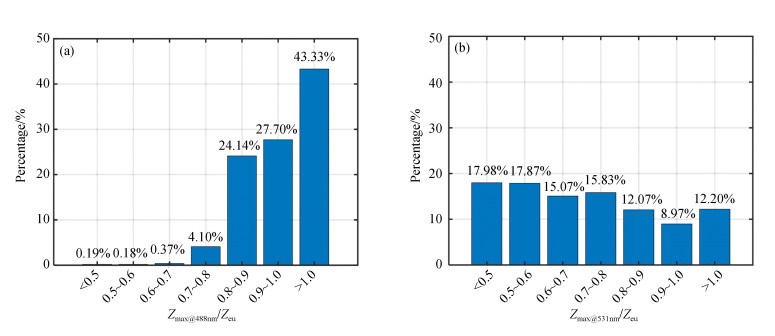
图 3 (a) 488 nm波段和(b) 531 nm波段探测深度与真光层深度之比
Figure 3. The statistical distribution of (a) Zmax@488 nm/Zeu and (b) Zmax@531 nm/Zeu
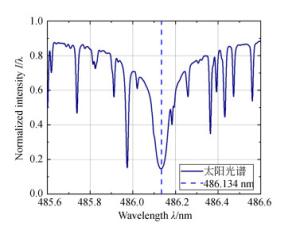
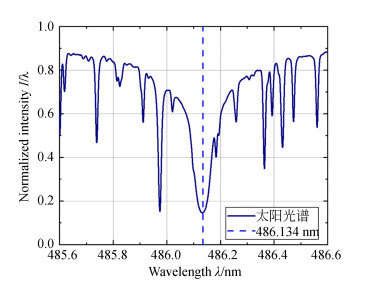
图 4 H-β夫琅禾费暗线附近的归一化太阳光谱强度
Figure 4. Normalized intensity of solar spectrum near the H-β Fraunhofer line
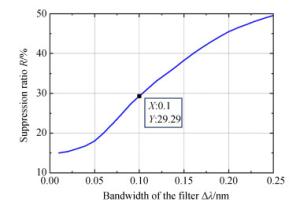
图 5 太阳背景光抑制比R与滤光片带宽Δλ之间的关系
Figure 5. Relationship between the bandwidth Δλ of filter and suppression ratio R of solar background light
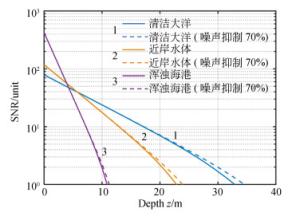
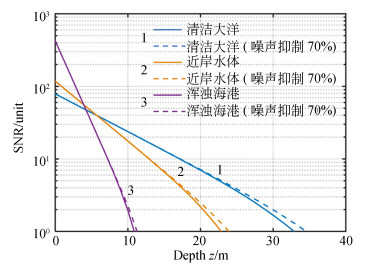
图 6 不同噪声水平下3种典型水体的信噪比和深度之间的关系
Figure 6. Relationship between SNR and depth of three typical types of seawater at two different noise levels
参数 值 卫星高度H/km 400 单脉冲激光能量E0/J 1.3 采样频率f/MHz 200 望远镜口径D/m 1.5 接收视场角FOV/mard 0.15 滤光片带宽Δλ/nm 0.1 海水折射率n 1.33 探测器量子效率η 0.5 光学系统透过率k 0.9 海面透过率Ts 0.98 大气透过率Ta 0.6 太阳光谱辐亮度Ib 1.4 W·m-2·nm-1·sr-1  下载: 导出CSV
下载: 导出CSV
-
[1] BEHRENFELD M J, O'MALLEY R T, SIEGEL D A, et al.. Climate-driven trends in contemporary ocean productivity[J]. Nature, 2006, 444(7120): 752-755. doi: 10.1038/nature05317 [2] MCCLAIN C R. A decade of satellite ocean color observations[J]. Annual Review of Marine Science, 2009, 1: 19-42. doi: 10.1146/annurev.marine.010908.163650 [3] HOSTETLER C A, BEHRENFELD M J, HU Y X, et al.. Spaceborne lidar in the study of marine systems[J]. Annual Review of Marine Science, 2017, 10: 121-147. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3711114ee87babe43e8a198bb3401eb0 [4] BEHRENFELD M J, HU Y X, HOSTETLER C A, et al.. Space-based lidar measurements of global ocean carbon stocks[J]. Geophysical Research Letters, 2013, 40(16): 4355-4360. doi: 10.1002/grl.50816 [5] BEHRENFELD M J, HU Y X, O'MALLEY R T, et al.. Annual boom-bust cycles of polar phytoplankton biomass revealed by space-based lidar[J]. Nature Geoscience , 2017, 10(2): 118-122. doi: 10.1038/ngeo2861 [6] LIU Q, LIU D, BAI J, et al.. Relationship between the effective attenuation coefficient of spaceborne lidar signal and the IOPs of seawater[J]. Optics Express, 2018, 26(23): 30278-30291. doi: 10.1364/OE.26.030278 [7] 海洋国家实验室 . 海洋国家实验室组织召开“观澜号”海洋科学卫星总体设计及其遥感应用关键技术研发项目论证会[EB/OL]. (2017-11-17). http://www.qnlm.ac/page?a=5&b=3&c=63&p=detail.The Pilot National Laboratory for Marine Science and Technology. The Pilot National Laboratory for marine science and technology held the demonstrating meeting on the project of design of "GuanLan" marine science satellite and key technologies for remote sensing applications[EB/OL]. (2017-11-17). http://www.qnlm.ac/page?a=5&b=3&c=63&p=detail. (in Chinese) [8] SCHULIEN J A, BEHRENFELD M J, HAIR J W, et al.. Vertically- resolved phytoplankton carbon and net primary production from a high spectral resolution lidar[J]. Optics Express, 2017, 25(12): 13577-13587. doi: 10.1364/OE.25.013577 [9] LEE J H, CHURNSIDE J H, MARCHBANKS R D, et al.. Oceanographic lidar profiles compared with estimates from in situ optical measurements[J]. Applied Optics, 2013, 52(4): 786-794. doi: 10.1364/AO.52.000786 [10] 周雨迪, 刘东, 徐沛拓, 等.偏振激光雷达探测大气-水体光学参数廓线[J].遥感学报, 2019, 23(1): 108-115.ZHOU Y D, LIU D, XU P T, et al.. Detecting atmospheric-water optical property profiles with a polarized lidar[J]. Journal of Remote Sensing, 2019, 23(1): 108-115. (in Chinese) [11] 刘秉义, 李瑞琦, 杨倩, 等.蓝绿光星载海洋激光雷达全球探测深度估算[J].红外与激光工程, 2019, 48(1): 117-122. http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201901017LIU B Y, LI R Q, YANG Q, et al.. Estimation of global detection depth of spaceborne oceanographic lidar in blue-green spectral region[J]. Infrared and Laser Engineering, 2019, 48(1): 117-122. (in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hwyjggc201901017 [12] CHURNSIDE J H. Review of profiling oceanographic lidar[J]. Optical Engineering, 2014, 53(5): 051405. http://cn.bing.com/academic/profile?id=073b0f485a4557634458ee899842194a&encoded=0&v=paper_preview&mkt=zh-cn [13] LIU ZH Y, VOELGER P, SUGIMOTO N. Simulations of the observation of clouds and aerosols with the experimental lidar in space equipment system[J]. Applied Optics, 2000, 39(18): 3120-3137. doi: 10.1364/AO.39.003120 [14] GORDON H R. Interpretation of airborne oceanic lidar: effects of multiple scattering[J]. Applied Optics, 1982, 21(16): 2996-3001. doi: 10.1364/AO.21.002996 [15] LEE Z P, DARECKI M, CARDER K L, et al.. Diffuse attenuation coefficient of downwelling irradiance: an evaluation of remote sensing methods[J]. Journal of Geophysical Research: Oceans, 2005, 110(C2): C02017. doi: 10.1029-2004JC002573/ [16] CULLEN J J. Subsurface chlorophyll maximum layers: enduring enigma or mystery solved?[J]. Annual Review of Marine Science, 2015, 7: 207-239. doi: 10.1146/annurev-marine-010213-135111 [17] MOREL A, BERTHON J F. Surface pigments, algal biomass profiles, and potential production of the euphotic layer: relationships reinvestigated in view of remote-sensing applications[J]. Limnology and Oceanography, 1989, 34(8): 1545-1562. doi: 10.4319/lo.1989.34.8.1545 [18] LEE Z, WEIDEMANN A, KINDLE J, et al.. Euphotic zone depth: its derivation and implication to ocean-color remote sensing[J]. Journal of Geophysical Research: Oceans, 2007, 112(C3): C03009. http://cn.bing.com/academic/profile?id=1565cabd32401c16cd0b5ec096002921&encoded=0&v=paper_preview&mkt=zh-cn [19] MA J, LU T T, ZHU X L, et al.. Highly efficient H-β Fraunhofer line optical parametric oscillator pumped by a single-frequency 355 nm laser[J]. Chinese Optics Letters, 2018, 16(8): 081901. doi: 10.3788/COL201816.081901 [20] CHURNSIDE J H, WILSON J J, OLIVER C W. Evaluation of the capability of the experimental oceanographic fisheries lidar (FLOE) for tuna detection in the eastern tropical pacific[R]. Boulder: Environmental Technology Laboratory, 1998. [21] MOBLEY C D. Light and Water: Radiative Transfer in Natural Waters[M]. San Diego: Academic Press, 1994. [22] GABRIEL C, KHALIGHI M A, BOURENNANE S, et al.. Monte-carlo-based channel characterization for underwater optical communication systems[J]. Journal of Optical Communications and Networking, 2013, 5(1): 1-12. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=d2a660933f65f6aa98df011d8d4518a1 -

 下载:
下载:



计量
- 文章访问数: 2604
- HTML全文浏览量: 1042
- PDF下载量: 175
- 被引次数: 0
