


-
摘要: 为了在保证结构简单的前提下,实现衍射光栅精密测量系统的大量程、高精度、多维度测量,设计了能够同时测量位移和角度的五维自由度衍射光栅精密测量系统。基于利特罗对称式光路结构,采用高刻线密度的一维衍射光栅以及外差干涉原理实现了沿光栅矢量方向和光栅法线方向的二维位移测量;通过引入高精度的位置灵敏探测器,结合±1级衍射光与光栅之间的角度变化关系实现了对光栅俯仰、偏摆和滚转三个维度的角度误差测量。实验结果表明:该衍射光栅精密测量系统能够实现分辨力优于4 nm的二维位移测量以及分辨力优于1″的三维角度测量,其位移测量范围只受限于光栅的尺寸,量程大大增加。该衍射光栅精密测量系统在精密测量领域有重要意义。Abstract: To realize large range, high precision and multi-dimensional measurement with a relatively simple structure, a grating-based precise measurement system is designed for five-dimensional measurement including simultaneous measurement of displacement and angle. Based on symmetrical Littrow structure and heterodyne interference principle, two-dimensional displacement measurement along grating's vector direction and normal direction is realized by using one-dimensional diffraction grating with high groove density. What's more, the angle errors of pitch, yaw and roll of grating are measured by using high precision position sensitive detectors considering the angular variation between ±1st order diffraction light and grating. Experimental results indicate that the proposed grating-based precision measurement system can achieve high precision and large range displacement measurement with resolution better than 4 nm. It can also realize high precision angle error measurement with resolution better than 1″. Moreover, because the displacement measurement range is only limited by the size of grating, its measuring range is greatly increased. The grating-based precision measurement system is very important for high precision measurement of displacement and angle in the field of precision measurement.
-
Key words:
- grating /
- precision measurement /
- five-dimensional
-

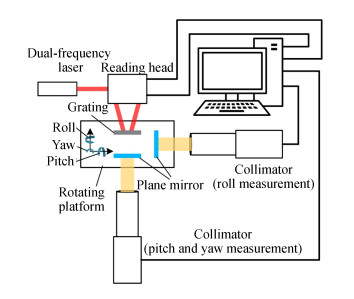
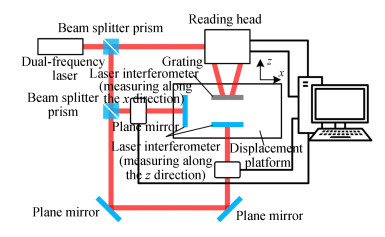
图 1 衍射光栅精密测量系统结构示意图
Figure 1. Schematic diagram of grating-based precision measurement system
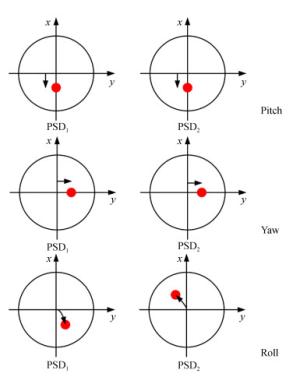
图 2 光斑位置与光栅旋转角度关系的示意图
Figure 2. Schematic diagram of the relationship between spot position and the rotation angle of the grating
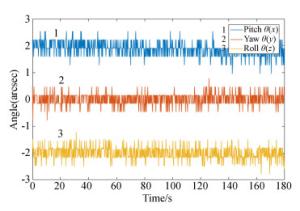
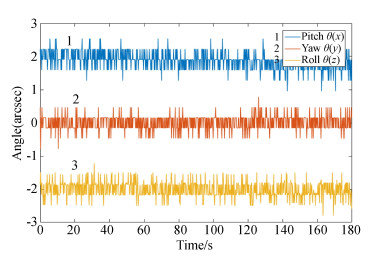
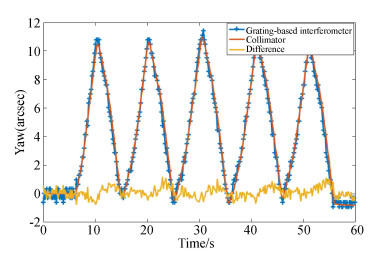
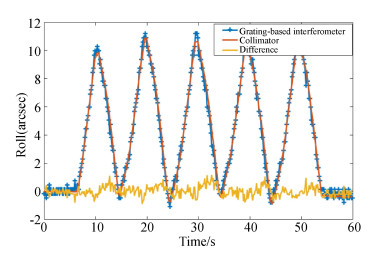
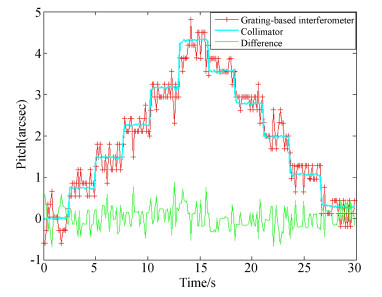
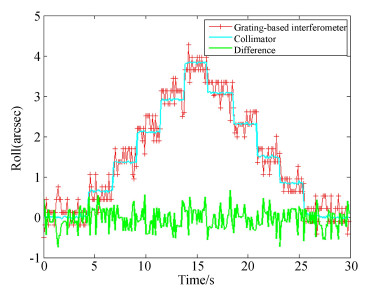
图 5 静止时衍射光栅精密测量系统对3个方向的测量结果
Figure 5. Rotation angle measurement results in three directions by proposed system at rest

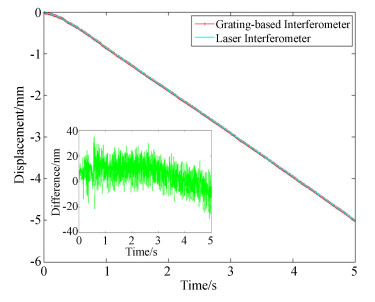
图 12 x方向5 mm位移测量结果
Figure 12. Measurement results for 5 mm displacement in x direction
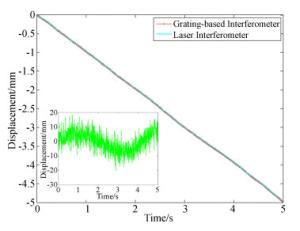
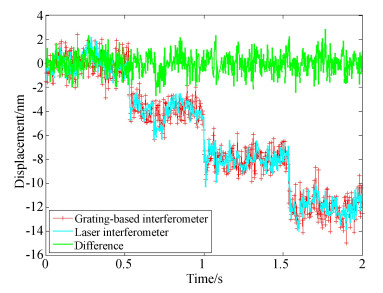
图 13 z方向5 mm位移测量结果
Figure 13. Measurement results for 5 mm displacement in z direction
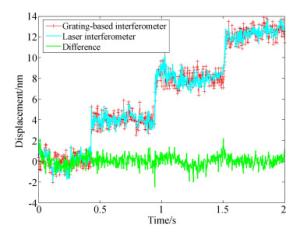
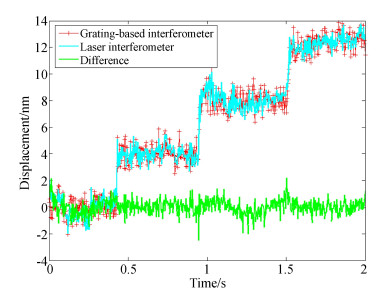
图 14 x方向4 nm位移测量结果
Figure 14. Measurement results for 4 nm displacement in x direction
-
[1] MALINAUSKAS M, ŽUKAUSKAS A, HASEGAWA S, et al.. Ultrafast laser processing of materials: from science to industry[J]. Light: Science & Applications, 2016, 5(8): e16133. http://cn.bing.com/academic/profile?id=239014bfba62c6c76ee4a8ba0164c6a7&encoded=0&v=paper_preview&mkt=zh-cn [2] URNESS A C, MOORE E D, KAMYSIAK K K, et al.. Liquid deposition photolithography for submicrometer resolution three-dimensional index structuring with large throughput[J]. Light: Science & Applications, 2013, 2(3): e56. http://cn.bing.com/academic/profile?id=fc6f15f2d51a403e591f169c2b90714a&encoded=0&v=paper_preview&mkt=zh-cn [3] SUGIOKA K, CHENG Y. Ultrafast lasers-reliable tools for advanced materials processing[J]. Light: Science & Applications, 2014, 3(4): e149. http://cn.bing.com/academic/profile?id=4fbfbe6c047a9e26acc6b3e36ccf3030&encoded=0&v=paper_preview&mkt=zh-cn [4] 敬世美, 张轩宇, 梁居发, 等.飞秒激光刻写的超短光纤布拉格光栅及其传感特性[J].中国光学, 2017, 10(4): 449-454. http://www.chineseoptics.net.cn/CN/abstract/abstract9528.shtmlJING SH M, ZHANG X Y, LIANG J F, et al.. Ultrashort fiber Bragg grating written by femtosecond laser and its sensing characteristics[J]. Chinese Optics, 2017, 10(4): 449-454. (in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9528.shtml [5] 陈宝刚, 明名, 吕天宇.大口径球面反射镜曲率半径的精确测量[J].中国光学, 2014, 7(1): 163-168. http://www.chineseoptics.net.cn/CN/abstract/abstract9111.shtmlCHEN B G, MING M, LV T Y. Precise measurement of curvature radius for spherical mirror with large aperture[J]. Chinese Optics, 2014, 7(1): 163-168. (in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9111.shtml [6] LOU Y T, YAN L P, CHEN B Y, et al.. Laser homodyne straightness interferometer with simultaneous measurement of six degrees of freedom motion errors for precision linear stage metrology[J]. Optics Express, 2017, 25(6): 6805-6821. doi: 10.1364/OE.25.006805 [7] ZHANG E ZH, CHEN B Y, ZHENG H, et al.. Laser heterodyne interferometer with rotational error compensation for precision displacement measurement[J]. Optics Express, 2018, 26(1): 90-98. doi: 10.1364/OE.26.000090 [8] 吕强, 李文昊, 巴音贺希格, 等.基于衍射光栅的干涉式精密位移测量系统[J].中国光学, 2017, 10(1): 39-50. http://www.chineseoptics.net.cn/CN/abstract/abstract9490.shtmlLV Q, LI W H, BAYANHESHIG, et al.. Interferometric precision displacement measurement system based on diffraction grating[J]. Chinese Optics, 2017, 10(1): 39-50. (in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9490.shtml [9] ESTLER W T. High-accuracy displacement interferometry refin air[J]. Applied Optics, 1985, 24(6): 808-815. doi: 10.1364/AO.24.000808 [10] GERASIMOV F M. Use of diffraction gratings for controlling a ruling engine[J]. Applied Optics, 1967, 6(11): 1861-1865. doi: 10.1364/AO.6.001861 [11] HSIEH H L, CHEN J C, LERONDEL G, et al.. Two-dimensional displacement measurement by quasi-common-optical-path heterodyne grating interferometer[J]. Optics Express, 2011, 19(10): 9770-9782. doi: 10.1364/OE.19.009770 [12] CHUNG Y CH, FAN K C, LEE B C. Development of a novel planar encoder for 2D displacement measurement in nanometer resolution and accuracy[C]. Proceedings of the 2011 9th World Congress on Intelligent Control and Automation, IEEE, 2011: 449-453. https://www.researchgate.net/publication/241187504_Development_of_a_novel_planar_encoder_for_2D_displacement_measurement_in_nanometer_resolution_and_accuracy [13] GAO W, KIMURA A. A three-axis displacement sensor with nanometric resolution[J]. CIRP Annals, 2007, 56(1): 529-532. doi: 10.1016/j.cirp.2007.05.126 [14] KIMURA A, GAO W, KIM W, et al.. A sub-nanometric three-axis surface encoder with short-period planar gratings for stage motion measurement[J]. Precision Engineering, 2012, 36(4): 576-585. doi: 10.1016/j.precisioneng.2012.04.005 [15] LU Y C, WEI CH L, JIA W, et al.. Two-degree-freedom displacement measurement based on a short period grating in symmeric Littrow configuration[J]. Optics Communications, 2016, 380: 382-386. https://www.sciencedirect.com/science/article/abs/pii/S0030401816305132 [16] ŠIAUDINYTE · L, MOLNAR G, KÖNING R, et al.. Multi-dimensional grating interferometer based on fibre-fed measurement heads arranged in Littrow configuration[J]. Measurement Science and Technology, 2018, 29(5): 054007. doi: 10.1088/1361-6501/aaa8b4 [17] LV Q, LIU ZH W, WANG W, et al.. Simple and compact grating-based heterodyne interferometer with the Littrow configuration for high-accuracy and long-range measurement of two-dimensional displacement[J]. Applied Optics, 2018, 57(31): 9455-9463. doi: 10.1364/AO.57.009455 [18] LIU C H, HUANG H L, LEE H W. Five-degrees-of-freedom diffractive laser encoder[J]. Applied Optics, 2009, 48(14): 2767-2777. doi: 10.1364/AO.48.002767 [19] GAO W, SAITO Y, MUTO H, et al.. A three-axis autocollimator for detection of angular error motions of a precision stage[J]. CIRP Annals, 2011, 60(1): 515-518. doi: 10.1016/j.cirp.2011.03.052 [20] LI X H, GAO W, MUTO H, et al.. A six-degree-of-freedom surface encoder for precision positioning of a planar motion stage[J]. Precision Engineering, 2013, 37(3): 771-781. doi: 10.1016/j.precisioneng.2013.03.005 [21] TEIMEL A. Technology and applications of grating interferometers in high-precision measurement[J]. Precision Engineering, 1992, 14(3): 147-154. doi: 10.1016-0141-6359(92)90003-F/ [22] 周炳琨, 高以智, 陈倜嵘, 等.激光原理[M]. 6版.北京:国防工业出版社, 2009.ZHOU B K, GAO Y ZH, CHEN T R, et al.. Laser Principle[M]. 6th ed. Beijing: National Defend Industry Press, 2009. (in Chinese) -

 下载:
下载:





计量
- 文章访问数: 2678
- HTML全文浏览量: 1195
- PDF下载量: 102
- 被引次数: 0
