2016 Vol. 9, No. 3
2016, 9(3): 301-311.
doi: 10.3788/CO.20160903.0301
 Abstract
Abstract FullText HTML
FullText HTML PDF 2044KB
PDF 2044KB
Abstract:
For the scattering effect of water, the laser spot, and other non-ideal imaging device, the image appears a large number of irregular granular noise. All of them increase the background noise of underwater range-gated images, blurring the target profile, obscuring details of the target, and reducing SNR. A denoising method based on gradient and wavelet transform is proposed. Firstly, the cosine wavelet transform is used to decompose the noisy image into many different frequency space image sets. For low frequency space image, a new image gradient enhancement method is used to improve the whole image's texture information. The LH or HL space images which have the information of non-uniform strips use the surface fitting method to eliminate the whole image's non-uniform strips. In the HH space denoising process, for the lower level space images, the non-local means method is used to preserve the whole image's similarity information, and for the upper space images, the fractional integral method is used to preserve the whole image's more details. Finally, the inverse wavelet transform is used to obtain the final image. Some contrast experiment are taken using underwater images from the long sink. The results show that the denoise method proposed in this paper can smooth the noise and preserve more texture of the image at the same time that comparing with other contrast methods. The objective evaluating index is improved by 6%.
For the scattering effect of water, the laser spot, and other non-ideal imaging device, the image appears a large number of irregular granular noise. All of them increase the background noise of underwater range-gated images, blurring the target profile, obscuring details of the target, and reducing SNR. A denoising method based on gradient and wavelet transform is proposed. Firstly, the cosine wavelet transform is used to decompose the noisy image into many different frequency space image sets. For low frequency space image, a new image gradient enhancement method is used to improve the whole image's texture information. The LH or HL space images which have the information of non-uniform strips use the surface fitting method to eliminate the whole image's non-uniform strips. In the HH space denoising process, for the lower level space images, the non-local means method is used to preserve the whole image's similarity information, and for the upper space images, the fractional integral method is used to preserve the whole image's more details. Finally, the inverse wavelet transform is used to obtain the final image. Some contrast experiment are taken using underwater images from the long sink. The results show that the denoise method proposed in this paper can smooth the noise and preserve more texture of the image at the same time that comparing with other contrast methods. The objective evaluating index is improved by 6%.









2016, 9(3): 312-319.
doi: 10.3788/CO.20160903.0312
Abstract:
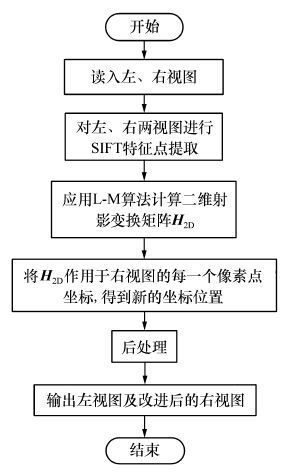
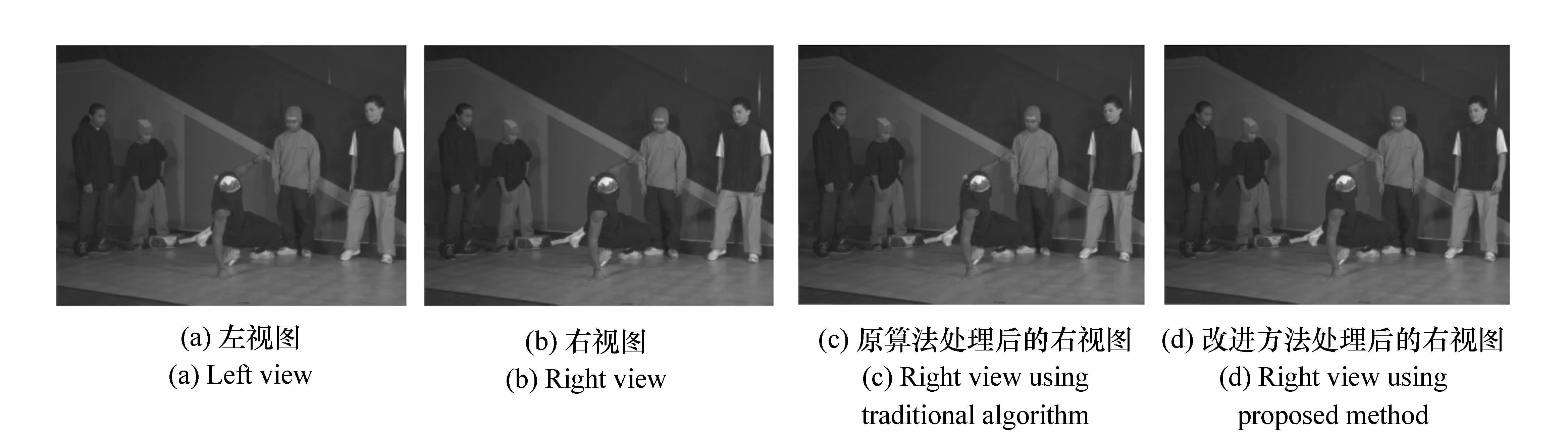
The existence of vertical parallax is the main factor of affecting the viewing comfort of stereo video. In order to reduce the vertical parallax without affecting the horizontal parallax, Levenberg-Marquardt(L-M) algorithm which is the nonlinear algorithm, is introduced in this paper to achieve the accuracy of the transformation matrix. Firstly, the SIFT algorithm, which is invariant to scaling, rotation and affine transformation, is used to detect the feature matching points from the binocular images. Then according to the coordinate position of matching points, the transformation matrix, which can reduce the vertical parallax, is calculated using Levenberg-Marquardt algorithm. Finally, the transformation matrix is applied to target image to calculate the new coordinate position of each pixel from the view images. The experimental results show that compared with the method that can reduce the vertical parallax using linear algorithm to calculate two-dimensional projective transformation, the proposed method using nonlinear algorithm improves the vertical parallax reduction from about 0.029 1 to 0.323 2 pixel and the effect of horizontal parallax is reduced from about 0.118 7 to 1.139 1 pixel. Therefore, the proposed method can optimize the vertical parallax reduction.
The existence of vertical parallax is the main factor of affecting the viewing comfort of stereo video. In order to reduce the vertical parallax without affecting the horizontal parallax, Levenberg-Marquardt(L-M) algorithm which is the nonlinear algorithm, is introduced in this paper to achieve the accuracy of the transformation matrix. Firstly, the SIFT algorithm, which is invariant to scaling, rotation and affine transformation, is used to detect the feature matching points from the binocular images. Then according to the coordinate position of matching points, the transformation matrix, which can reduce the vertical parallax, is calculated using Levenberg-Marquardt algorithm. Finally, the transformation matrix is applied to target image to calculate the new coordinate position of each pixel from the view images. The experimental results show that compared with the method that can reduce the vertical parallax using linear algorithm to calculate two-dimensional projective transformation, the proposed method using nonlinear algorithm improves the vertical parallax reduction from about 0.029 1 to 0.323 2 pixel and the effect of horizontal parallax is reduced from about 0.118 7 to 1.139 1 pixel. Therefore, the proposed method can optimize the vertical parallax reduction.



2016, 9(3): 320-328.
doi: 10.3788/CO.20160903.0320
Abstract:
In order to solve the problem of current moving object tracking algorithm which can not apply in some non-ideal conditions such as low contrast, low signal to noise ratio, target rotation and scaling, this paper presents a method based on multi-feature fusion in the complex background by improving the meanshift algorithm to realize the complex gray image tracking. The algorithm needs to not only meet the conditions required for engineering practice but also satisfy precise in object tracking stabilization. Firstly, using the algorithm we calculate gradient characteristics in gray image, the gradient characteristics including gradient features in X, Y two directions. Secondly, the algorithm integrates the two directions gradient and gray features to get new fusion features. The new fusion features provide more distinguishable measurements than the traditional ones, and they have high adaptability and stability in some conditions such as low contrast, large flexible changes of targets by using the kernel density function. Thirdly, the foreground objects results can be extracted by background modeling object detection algorithm, which takes moving target feature information as a weight value. Finally, the fusion features object is tracked by improved meanshift algorithm in this paper. A series of experiments results show that the multi-feature fusion moving object tracking method can stably track low contrast target in complex gray image. The algorithm can adapt to the complex changes of object and background. And it also has strong robustness to meet the actual needs of the engineering practice.
In order to solve the problem of current moving object tracking algorithm which can not apply in some non-ideal conditions such as low contrast, low signal to noise ratio, target rotation and scaling, this paper presents a method based on multi-feature fusion in the complex background by improving the meanshift algorithm to realize the complex gray image tracking. The algorithm needs to not only meet the conditions required for engineering practice but also satisfy precise in object tracking stabilization. Firstly, using the algorithm we calculate gradient characteristics in gray image, the gradient characteristics including gradient features in X, Y two directions. Secondly, the algorithm integrates the two directions gradient and gray features to get new fusion features. The new fusion features provide more distinguishable measurements than the traditional ones, and they have high adaptability and stability in some conditions such as low contrast, large flexible changes of targets by using the kernel density function. Thirdly, the foreground objects results can be extracted by background modeling object detection algorithm, which takes moving target feature information as a weight value. Finally, the fusion features object is tracked by improved meanshift algorithm in this paper. A series of experiments results show that the multi-feature fusion moving object tracking method can stably track low contrast target in complex gray image. The algorithm can adapt to the complex changes of object and background. And it also has strong robustness to meet the actual needs of the engineering practice.







2016, 9(3): 329-334.
doi: 10.3788/CO.20160903.0329
Abstract:
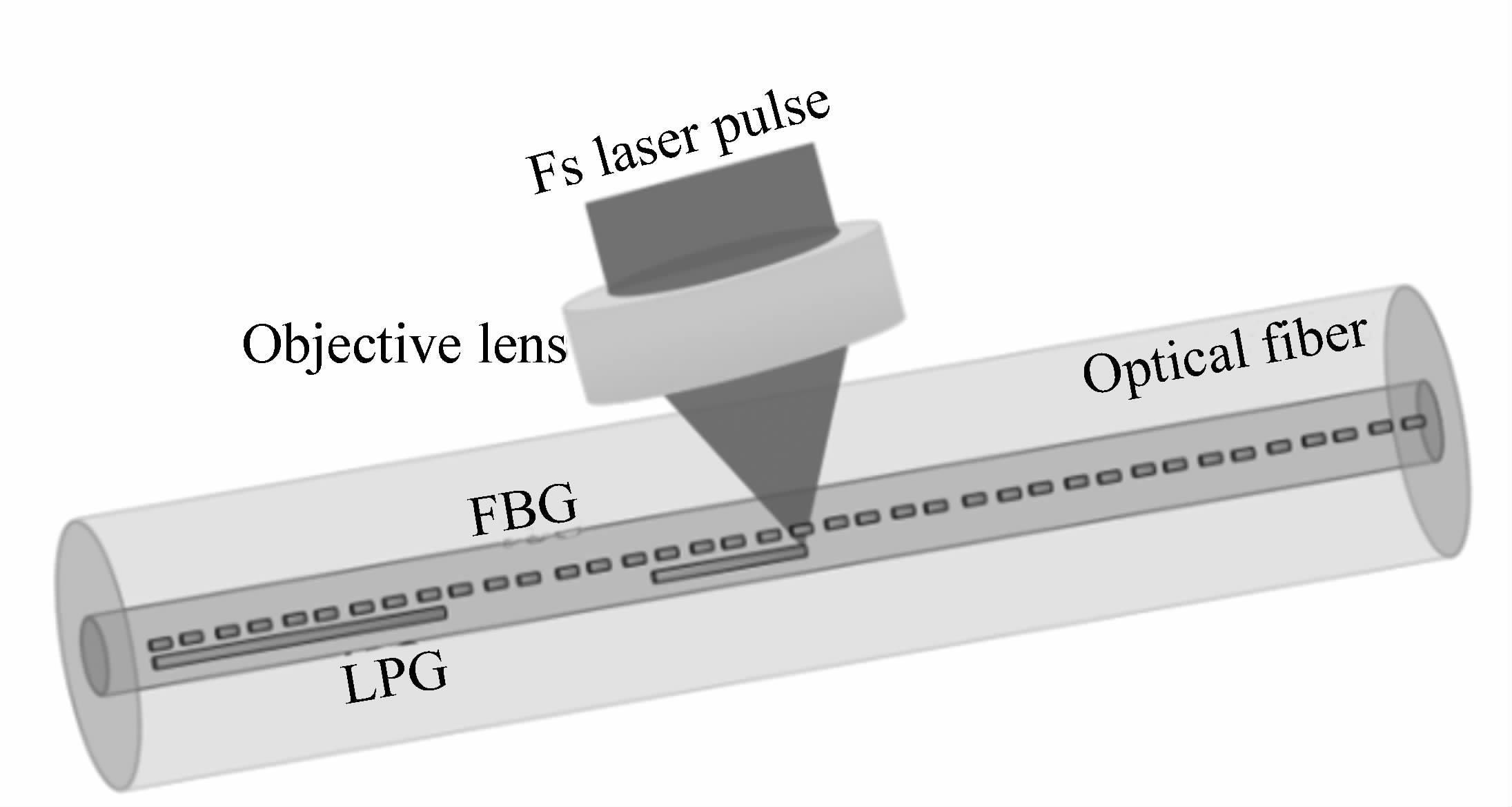
In order to improve the performance of the fiber optic sensors and further reduce the size of them, a new integrated optical sensor based on a fiber Bragg grating(FBG) in parallel with a long-period grating(LPG) in a single mode fiber is reported in this paper. The FBG and the LPG are fabricated by femtosecond laser using direct inscription process. The variations of temperature and refractive index will cause the variations of resonant wavelengths of FBG and LPG. The experimental results show that the refractive index sensitivities of the FBG and the LPG respectively are 0 nm/RIU and 196.46 nm/RIU, and the temperature sensitivities of them are 12.98 pm/℃ and 10.93 pm/℃ respectively. Therefore, this sensor can be used for measuring temperature and refractive index simultaneously according to the dual parameters sensing matrix.
In order to improve the performance of the fiber optic sensors and further reduce the size of them, a new integrated optical sensor based on a fiber Bragg grating(FBG) in parallel with a long-period grating(LPG) in a single mode fiber is reported in this paper. The FBG and the LPG are fabricated by femtosecond laser using direct inscription process. The variations of temperature and refractive index will cause the variations of resonant wavelengths of FBG and LPG. The experimental results show that the refractive index sensitivities of the FBG and the LPG respectively are 0 nm/RIU and 196.46 nm/RIU, and the temperature sensitivities of them are 12.98 pm/℃ and 10.93 pm/℃ respectively. Therefore, this sensor can be used for measuring temperature and refractive index simultaneously according to the dual parameters sensing matrix.





2016, 9(3): 335-341.
doi: 10.3788/CO.20160903.0335
Abstract:
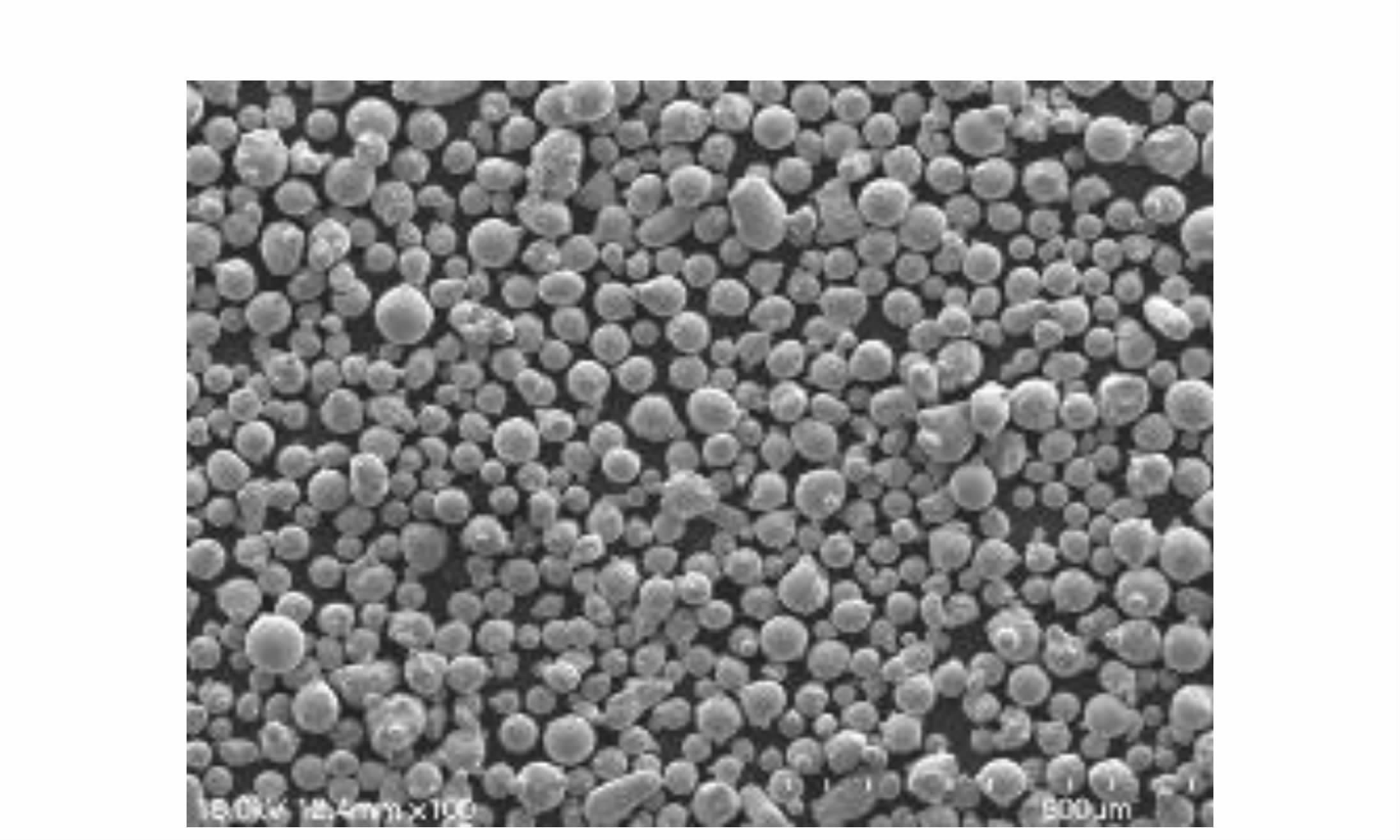
In this paper, porous nickel-based alloys are produced using 3D printing laser melting technique. Microstructure and compressive mechanical properties of porous nickel-base alloys are studied. The results show that the porosity of the porous nickel alloy is 14.68%-18.97%, and the compressive strength is 461-535 MPa. The microstructure of porous nickel-based alloys is composed of γ-Ni dendrite. The SEM of compression fracture surface show that the fracture mode is the tearing dendrite fracture.
In this paper, porous nickel-based alloys are produced using 3D printing laser melting technique. Microstructure and compressive mechanical properties of porous nickel-base alloys are studied. The results show that the porosity of the porous nickel alloy is 14.68%-18.97%, and the compressive strength is 461-535 MPa. The microstructure of porous nickel-based alloys is composed of γ-Ni dendrite. The SEM of compression fracture surface show that the fracture mode is the tearing dendrite fracture.





2016, 9(3): 342-348.
doi: 10.3788/CO.20160903.0342
Abstract:
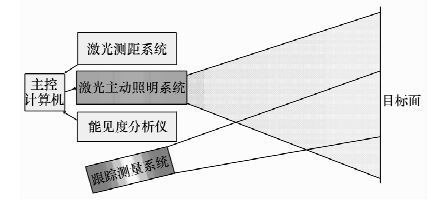
In order to improve detection ability of tracking system for the dim target, a set of automatic laser active illumination system is designed for actively illuminating the view field of tracking and measurement. The illumination diameter is always 10 meters at a distance of 0.2 km to 5 km away from the system. The amount of focusing group movement at -20℃ and 45℃ is given. The simulation results show that the illumination nonuniformity is less than 15%. By analyzing the optical aberration effects on the illumination uniformity and designed dimming group, the theoretical relationship between the dimming group movement and the illumination distance is gotten. The design result shows that the illumination in different distances will be uniform by adjusting the dimming group position automatically. The design and analysis results show that laser active illumination system can accomplish uniform illumination for the view field of tracking and measurement by moving the dimming group, which is beneficial for the dim target detection and measurement.
In order to improve detection ability of tracking system for the dim target, a set of automatic laser active illumination system is designed for actively illuminating the view field of tracking and measurement. The illumination diameter is always 10 meters at a distance of 0.2 km to 5 km away from the system. The amount of focusing group movement at -20℃ and 45℃ is given. The simulation results show that the illumination nonuniformity is less than 15%. By analyzing the optical aberration effects on the illumination uniformity and designed dimming group, the theoretical relationship between the dimming group movement and the illumination distance is gotten. The design result shows that the illumination in different distances will be uniform by adjusting the dimming group position automatically. The design and analysis results show that laser active illumination system can accomplish uniform illumination for the view field of tracking and measurement by moving the dimming group, which is beneficial for the dim target detection and measurement.








2016, 9(3): 349-355.
doi: 10.3788/CO.20160903.0349
Abstract:
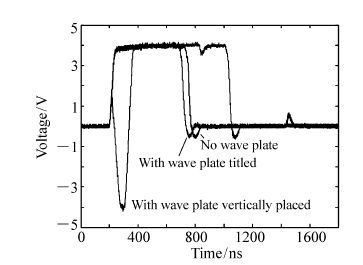
To meet the requirements of light and small laser 3D imaging system on airborne platforms, a co-aperture laser transceiver optical system is designed employing APD array. On the basis of a brief analysis of the imaging system illumination pattern and optical system structure, the laser 3D imaging system block diagram is given as following: the laser beam can pass through a diffraction element to achieve beam splitting and the mirror with a hole in the middle is used to achieve coupled launching/transmitting optical path. The optical system is used for three-dimensional imaging within a distance of 2 km, and the receiving optical system parameters are determined according to the laser operating range equation to obtain enough echo energy to satisfy the noise ratio. In order to avoid crosstalk between pixels, beam expander of five times is designed. Finally, the stray light is diminished to reduce the impact of the emitted light path on receiving light path by combining the polaroid and quarter-wave plate. The results indicate that the receiving optics has a diffuse spot diameter less than 120 μm and distortion less than 0.2%. The whole optical system could be an example for the similar design with small size, light weight and fine imaging quality.
To meet the requirements of light and small laser 3D imaging system on airborne platforms, a co-aperture laser transceiver optical system is designed employing APD array. On the basis of a brief analysis of the imaging system illumination pattern and optical system structure, the laser 3D imaging system block diagram is given as following: the laser beam can pass through a diffraction element to achieve beam splitting and the mirror with a hole in the middle is used to achieve coupled launching/transmitting optical path. The optical system is used for three-dimensional imaging within a distance of 2 km, and the receiving optical system parameters are determined according to the laser operating range equation to obtain enough echo energy to satisfy the noise ratio. In order to avoid crosstalk between pixels, beam expander of five times is designed. Finally, the stray light is diminished to reduce the impact of the emitted light path on receiving light path by combining the polaroid and quarter-wave plate. The results indicate that the receiving optics has a diffuse spot diameter less than 120 μm and distortion less than 0.2%. The whole optical system could be an example for the similar design with small size, light weight and fine imaging quality.







2016, 9(3): 356-363.
doi: 10.3788/CO.20160903.0356
Abstract:
The deposition rate distribution of single GdF3 layer deposited by ion beam sputtering(IBS) has been investigated in this paper. First, Two dimension deposition rate distribution of GdF3 thin films are measured by an UV-film thickness measuring instrument, and the expression of two dimension deposition rate distribution are obtained by using fitting models. Second, the influence of beam current, beam voltage and the angle of target on deposition rate distribution feature is analyzed. Finally, the experiments of thickness uniformity have been carried out using designed mask, based on the expression of two dimension deposition rate. Experimental results indicate that the deposition rate in horizontal direction is satisfied with the ECS function. And in vertical direction it is satisfied with standard Gauss function. The residual error of fitting expression is 2.05×10-6. The feature of deposition rate distribution remains the same when the beam current and beam voltage are changed. With the increase of the target angle, the value of peak width at half height of Gauss function are increased. The peak position is changing, and the maximum of deposition rate can be reached when the target angle is 292°. The thickness uniformity is adjusted to 97.9% for a plane element with radius of 270 mm by using mask.
The deposition rate distribution of single GdF3 layer deposited by ion beam sputtering(IBS) has been investigated in this paper. First, Two dimension deposition rate distribution of GdF3 thin films are measured by an UV-film thickness measuring instrument, and the expression of two dimension deposition rate distribution are obtained by using fitting models. Second, the influence of beam current, beam voltage and the angle of target on deposition rate distribution feature is analyzed. Finally, the experiments of thickness uniformity have been carried out using designed mask, based on the expression of two dimension deposition rate. Experimental results indicate that the deposition rate in horizontal direction is satisfied with the ECS function. And in vertical direction it is satisfied with standard Gauss function. The residual error of fitting expression is 2.05×10-6. The feature of deposition rate distribution remains the same when the beam current and beam voltage are changed. With the increase of the target angle, the value of peak width at half height of Gauss function are increased. The peak position is changing, and the maximum of deposition rate can be reached when the target angle is 292°. The thickness uniformity is adjusted to 97.9% for a plane element with radius of 270 mm by using mask.












Research on manufacturing method of non-rotationally symmetrical aspheric surface with high accuracy
2016, 9(3): 364-370.
doi: 10.3788/CO.20160903.0364
Abstract:
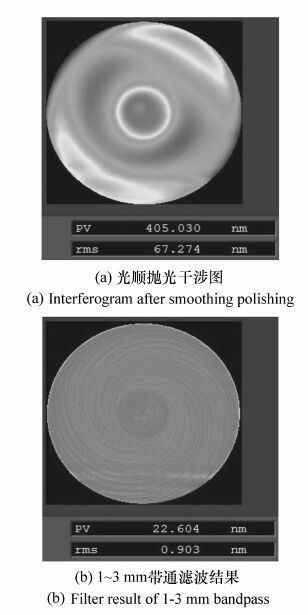
A novel manufacturing method of non-rotationally symmetrical aspheric surface with high accuracy is proposed in this paper. First, a optimum fit sphere of non-rotationally symmetrical asphere is ground through generating cutting, which is then polished through triditional polishing method in order to remove mid-spatial-frequency errors that cannot be realized through sub-aperture polishing tool. Finally, bonnet polishing method(IRP) is used for corrective polishing without generating extra mid-spatial-frequency errors in condition of high-accuracy positioning measurement technology. This method is employed in the manufacuring of a third-order aspheric surface with parameters of ROC=970.737 mm, k=-1 and D=106 mm. After several polishing iterations, the figure accuracy can be converged to 1/30λ(RMS). The correctness and feasibility of the manufacturing method are proved. This method would be meaningful in manufacturing non-rotationally symmetrical aspheric surface with small deviation in the future.
A novel manufacturing method of non-rotationally symmetrical aspheric surface with high accuracy is proposed in this paper. First, a optimum fit sphere of non-rotationally symmetrical asphere is ground through generating cutting, which is then polished through triditional polishing method in order to remove mid-spatial-frequency errors that cannot be realized through sub-aperture polishing tool. Finally, bonnet polishing method(IRP) is used for corrective polishing without generating extra mid-spatial-frequency errors in condition of high-accuracy positioning measurement technology. This method is employed in the manufacuring of a third-order aspheric surface with parameters of ROC=970.737 mm, k=-1 and D=106 mm. After several polishing iterations, the figure accuracy can be converged to 1/30λ(RMS). The correctness and feasibility of the manufacturing method are proved. This method would be meaningful in manufacturing non-rotationally symmetrical aspheric surface with small deviation in the future.








2016, 9(3): 371-378.
doi: 10.3788/CO.20160903.0371
Abstract:
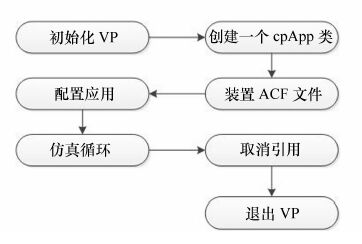
To estimate the attitude of the known 3D model space object from the mono-view image, a method is proposed by searching the local optimum of the correlation between the simulation image generated from Vega Prime and the observation image, which need not establish the relationships of target feature from 2D to 3D and abundant model matching library. Firstly, the input image is preprocessed to obtain the original target image. Secondly, Vega Prime program loads 3D model of the target, and generates a simulation matching image. The simulation image is preprocessed to obtain the matching target image. And the correlation of these two images is calculated. Finally, the attitude of model is updated until the correlation of the matching image and the original image is local optimum. Experimental results show that this method can estimate the attitude from the original simulation image accurately, and the average estimation error of the simulation observation image is 3.85°, which indicates that the proposed method is an effective method for space object attitude estimation.
To estimate the attitude of the known 3D model space object from the mono-view image, a method is proposed by searching the local optimum of the correlation between the simulation image generated from Vega Prime and the observation image, which need not establish the relationships of target feature from 2D to 3D and abundant model matching library. Firstly, the input image is preprocessed to obtain the original target image. Secondly, Vega Prime program loads 3D model of the target, and generates a simulation matching image. The simulation image is preprocessed to obtain the matching target image. And the correlation of these two images is calculated. Finally, the attitude of model is updated until the correlation of the matching image and the original image is local optimum. Experimental results show that this method can estimate the attitude from the original simulation image accurately, and the average estimation error of the simulation observation image is 3.85°, which indicates that the proposed method is an effective method for space object attitude estimation.











2016, 9(3): 379-384.
doi: 10.3788/CO.20160903.0379
Abstract:
The quality of full metal grating is affected by internal stress of SU-8 photoresist. Considering the stress measurement of SU-8 photoresist is difficult in recent years, the shearography is applied to measure the strain distribution of SU-8 photoresist which corresponds to the stress distribution of SU-8 photoresist. Strain distribution is acquired by processing interferometer images which are recorded before and after loading on the tested photoresist. The simulation result of the same photoresist is obtained by using the ANSYS finite element analysis software. The shearography measurement system is setup and demonstration experimental is carried out. The deformation of actual measurement is about 1.189 μm, and the deformation of simulation is 1.088 μm. The measurement error is in the allowed range. The deformation trend of experimental result is consistent with the simulation result. Results show that the shearography in SU-8 photoresist strain distribution measurement is valid and may be applied to measure whole field strain distribution of SU-8 photoresist in lossless.
The quality of full metal grating is affected by internal stress of SU-8 photoresist. Considering the stress measurement of SU-8 photoresist is difficult in recent years, the shearography is applied to measure the strain distribution of SU-8 photoresist which corresponds to the stress distribution of SU-8 photoresist. Strain distribution is acquired by processing interferometer images which are recorded before and after loading on the tested photoresist. The simulation result of the same photoresist is obtained by using the ANSYS finite element analysis software. The shearography measurement system is setup and demonstration experimental is carried out. The deformation of actual measurement is about 1.189 μm, and the deformation of simulation is 1.088 μm. The measurement error is in the allowed range. The deformation trend of experimental result is consistent with the simulation result. Results show that the shearography in SU-8 photoresist strain distribution measurement is valid and may be applied to measure whole field strain distribution of SU-8 photoresist in lossless.







2016, 9(3): 385-393.
doi: 10.3788/CO.20160903.0385
Abstract:
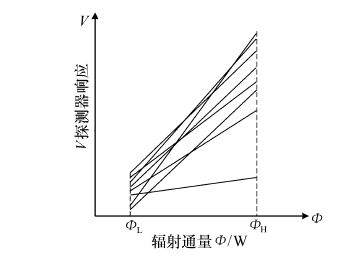
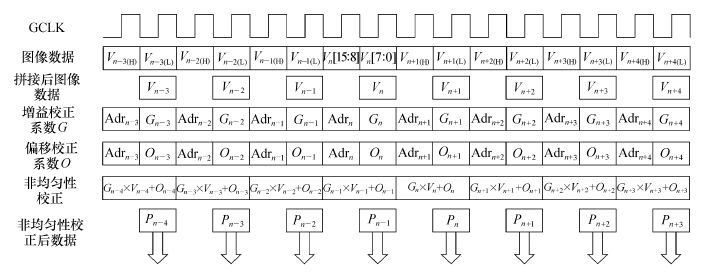
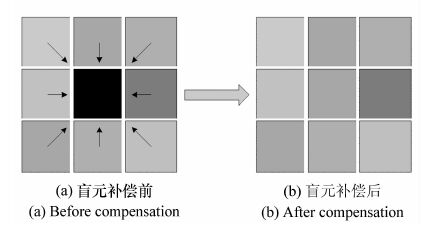
In order to improve the image quality of certain medium wave infrared detector, a infrared image real-time processing system based on FPGA is designed, which can accomplish nonuniformity correction and blind pixel compensation in real time. Some widely used nonuniformity correction algorithms, blind pixel detection and compensation algorithms are introduced. Combined with actual project requirements, nonuniformity correction with multi-point method and blind pixel compensation with eight-point average method are realized on the FPGA platform on the basis of successful simulation. User-defined coefficient updating, non-correction coefficients manually or automatically calculating and blind pixel lists automatically updating are realized by the system. The processing system is tested using certain domestic medium wave infrared detector, and the result shows that the nonuniformity of corrected image is less than 0.3% and the blind pixel of corrected image is less than 0.001%. The system is stable and reliable, which satisfies the requirements of image processing in real-time and accurancy.
In order to improve the image quality of certain medium wave infrared detector, a infrared image real-time processing system based on FPGA is designed, which can accomplish nonuniformity correction and blind pixel compensation in real time. Some widely used nonuniformity correction algorithms, blind pixel detection and compensation algorithms are introduced. Combined with actual project requirements, nonuniformity correction with multi-point method and blind pixel compensation with eight-point average method are realized on the FPGA platform on the basis of successful simulation. User-defined coefficient updating, non-correction coefficients manually or automatically calculating and blind pixel lists automatically updating are realized by the system. The processing system is tested using certain domestic medium wave infrared detector, and the result shows that the nonuniformity of corrected image is less than 0.3% and the blind pixel of corrected image is less than 0.001%. The system is stable and reliable, which satisfies the requirements of image processing in real-time and accurancy.