2016 Vol. 9, No. 4

2016, 9(4): 397-404.
doi: 10.3788/CO.20160904.0397
 Abstract
Abstract FullText HTML
FullText HTML PDF 2158KB
PDF 2158KB
Abstract:
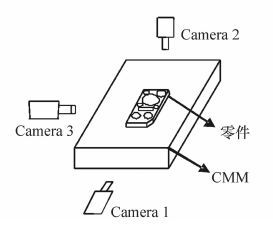
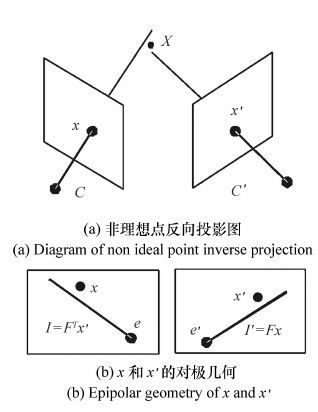
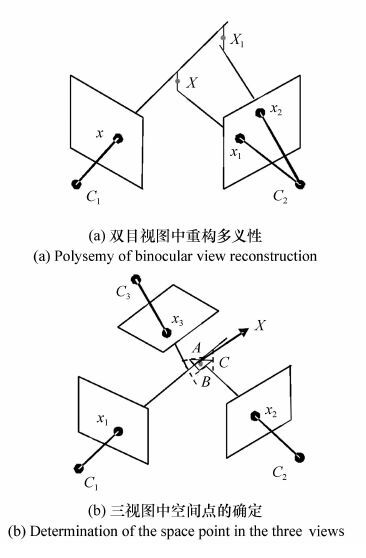
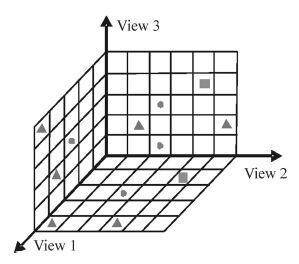
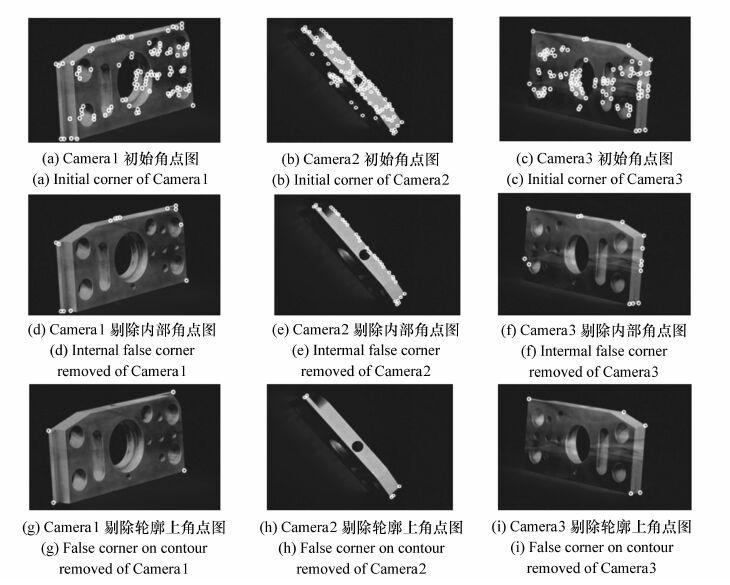
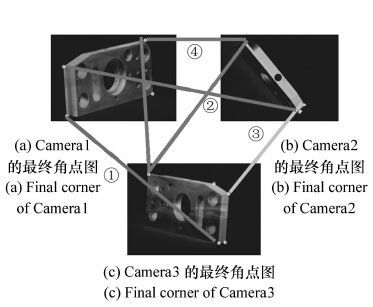
In this paper, a set of visual inspection system is designed based on three coordinate measuring machine(CMM), and the new visual system can extract the actual spatial feature information of the parts. For the parts with corner which is on the platform of CMM, the Harris operator is used to extract corners in the images obtained from three different orientation of the CMM. For the corner points extracted by the Harris operator, this paper proposes a method of eliminating the false corners, which combines eight-chain-code false corner search method and SUSAN method. Finally, based on the principle of stereo vision, the "Distance spatial map" matching algorithm is put forward, and then the three images are matched one by one. Although the position and orientation of parts are changed for many times in the experiment, the experiment results show that there are 1-2 pixels difference between extracted corners and the real corner points, and the position error of parts is 1-3 mm. Through the experiment, the accuracy and stability of corner matching and positioning can meet the requirements, and with anti-interference and practicability as well as.
In this paper, a set of visual inspection system is designed based on three coordinate measuring machine(CMM), and the new visual system can extract the actual spatial feature information of the parts. For the parts with corner which is on the platform of CMM, the Harris operator is used to extract corners in the images obtained from three different orientation of the CMM. For the corner points extracted by the Harris operator, this paper proposes a method of eliminating the false corners, which combines eight-chain-code false corner search method and SUSAN method. Finally, based on the principle of stereo vision, the "Distance spatial map" matching algorithm is put forward, and then the three images are matched one by one. Although the position and orientation of parts are changed for many times in the experiment, the experiment results show that there are 1-2 pixels difference between extracted corners and the real corner points, and the position error of parts is 1-3 mm. Through the experiment, the accuracy and stability of corner matching and positioning can meet the requirements, and with anti-interference and practicability as well as.
2016, 9(4): 405-414.
doi: 10.3788/CO.20160904.0405
Abstract:
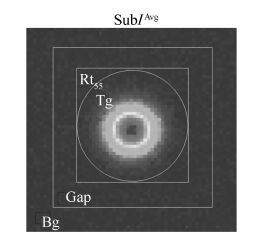
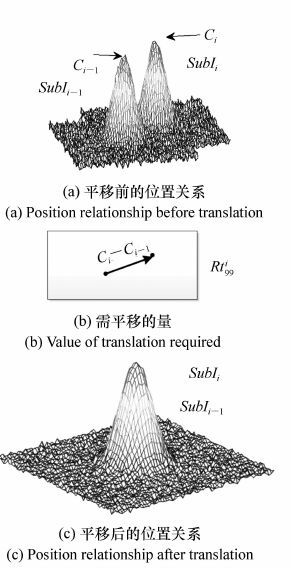
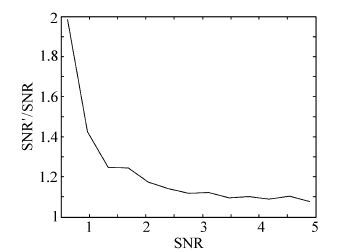
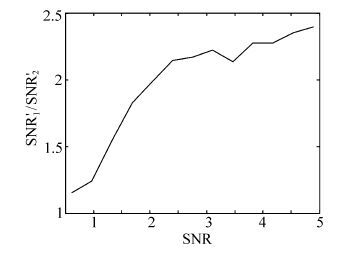
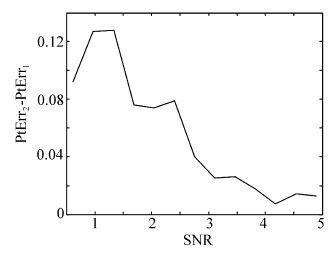
In order to accurately calculate star's centroid and energy in infrared electro-optical measuring system in daytime for low SNR star, an efficient method is presented. Firstly, according to the optical characteristics of electro-optical measuring system, the imaging characteristics of stars during the day are analyzed. Secondly, in order to obtain pre-processing sequence, these operations, which include non-uniformity correction, bad point's correction and background subtraction, are performed orderly in the acquired image sequence. Then a down-sampled image is got by performing image-stacking and down-sampling operation in the pre-processing sequence. Stellar suspected position is obtained by brightness characteristics in the down-sampled image, and a target area is located at stellar corresponding suspected position in the pre-processing sequence, then centroid sequence is extracted from the pre-processing sequence inside the target area. The sub images inside target area whose center is at the centroid are shifted and averaged to get a target sub image. Star extraction, centroid extraction and energy calculation are performed in the target image by stellar SNR criterion. Thirdly, the principle of this method to improve target SNR is revealed, its scope of application and the ways to determine the relevant parameters are analyzed. Experimental results indicate that the proposed shift-and-add method can improve target SNR and the extraction accuracy, for stars with SNR less than 4.8, its centroid extraction and energy calculation accuracy are increased by 0.06 pixel and 28.5% in average, respectively. Thus the shift-and-add method can achieve more accurate calculation of centroid and energy for low SNR star.
In order to accurately calculate star's centroid and energy in infrared electro-optical measuring system in daytime for low SNR star, an efficient method is presented. Firstly, according to the optical characteristics of electro-optical measuring system, the imaging characteristics of stars during the day are analyzed. Secondly, in order to obtain pre-processing sequence, these operations, which include non-uniformity correction, bad point's correction and background subtraction, are performed orderly in the acquired image sequence. Then a down-sampled image is got by performing image-stacking and down-sampling operation in the pre-processing sequence. Stellar suspected position is obtained by brightness characteristics in the down-sampled image, and a target area is located at stellar corresponding suspected position in the pre-processing sequence, then centroid sequence is extracted from the pre-processing sequence inside the target area. The sub images inside target area whose center is at the centroid are shifted and averaged to get a target sub image. Star extraction, centroid extraction and energy calculation are performed in the target image by stellar SNR criterion. Thirdly, the principle of this method to improve target SNR is revealed, its scope of application and the ways to determine the relevant parameters are analyzed. Experimental results indicate that the proposed shift-and-add method can improve target SNR and the extraction accuracy, for stars with SNR less than 4.8, its centroid extraction and energy calculation accuracy are increased by 0.06 pixel and 28.5% in average, respectively. Thus the shift-and-add method can achieve more accurate calculation of centroid and energy for low SNR star.

2016, 9(4): 415-422.
doi: 10.3788/CO.20160904.0415
Abstract:
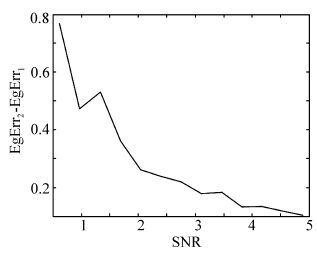
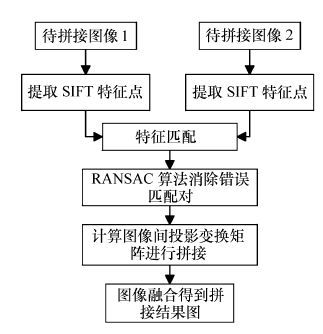
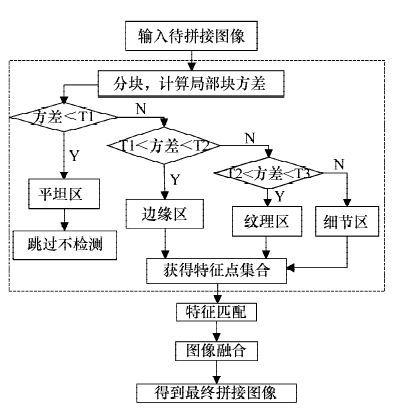
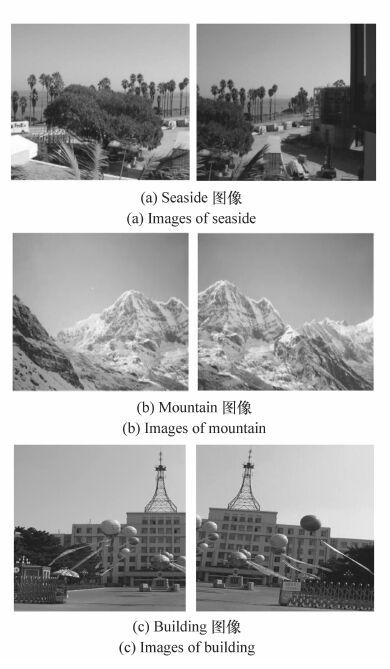
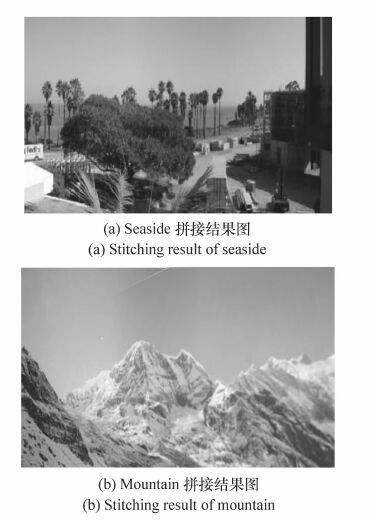
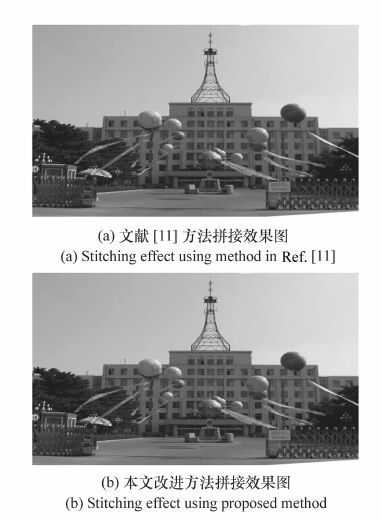
Aiming at the massive calculation burden and poor real-time performance of the existing image stitching methods, a fast image stitching method based on fast Scale Invariant Feature Transform(SIFT) algorithm with adaptive local image feature is proposed in this paper. Firstly, the images are divided into blocks. And the feature types of thses local image blocks are determined. The feature points of the local image blocks are extracted using different simplified method adaptively. Secondly, we use feature matching to get the transform matrix and the RANSAC algorithm is applied to remove the wrong matching point pairs. Finally, the stitched image can be obtained by image blending. In this paper, three groups of to-be-stitched images are used to test the performance of the proposed method. Experimental results show that compared with the standard stitching algorithm, the calculation speed by the proposed method is increased by about 30%-45%. In conclusion, the proposed method improves the stitching efficiency and efficiently overcomes the shortcomings of heavy computation in the process of image stitching while it consistently guarantees the quality of stitched image. It has a certain application value in the actual image stitching.
Aiming at the massive calculation burden and poor real-time performance of the existing image stitching methods, a fast image stitching method based on fast Scale Invariant Feature Transform(SIFT) algorithm with adaptive local image feature is proposed in this paper. Firstly, the images are divided into blocks. And the feature types of thses local image blocks are determined. The feature points of the local image blocks are extracted using different simplified method adaptively. Secondly, we use feature matching to get the transform matrix and the RANSAC algorithm is applied to remove the wrong matching point pairs. Finally, the stitched image can be obtained by image blending. In this paper, three groups of to-be-stitched images are used to test the performance of the proposed method. Experimental results show that compared with the standard stitching algorithm, the calculation speed by the proposed method is increased by about 30%-45%. In conclusion, the proposed method improves the stitching efficiency and efficiently overcomes the shortcomings of heavy computation in the process of image stitching while it consistently guarantees the quality of stitched image. It has a certain application value in the actual image stitching.

2016, 9(4): 423-431.
doi: 10.3788/CO.20160904.0423
Abstract:
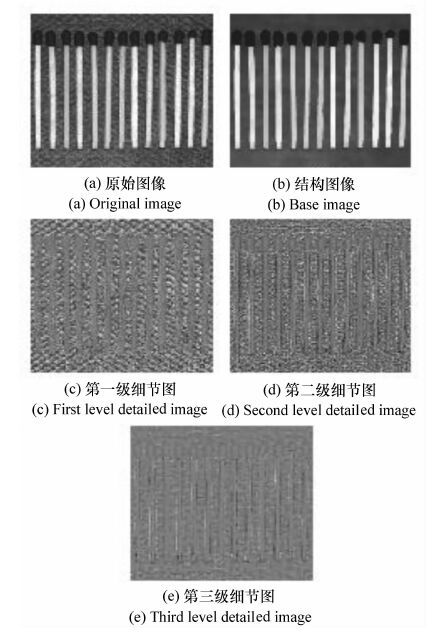
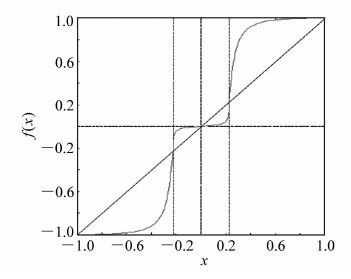
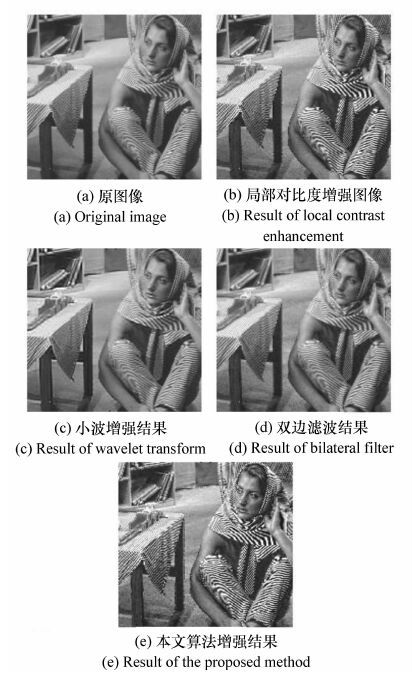
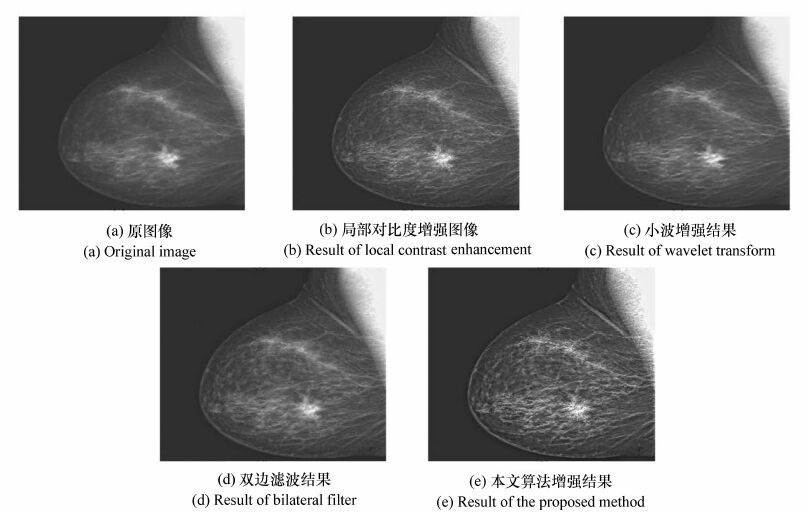
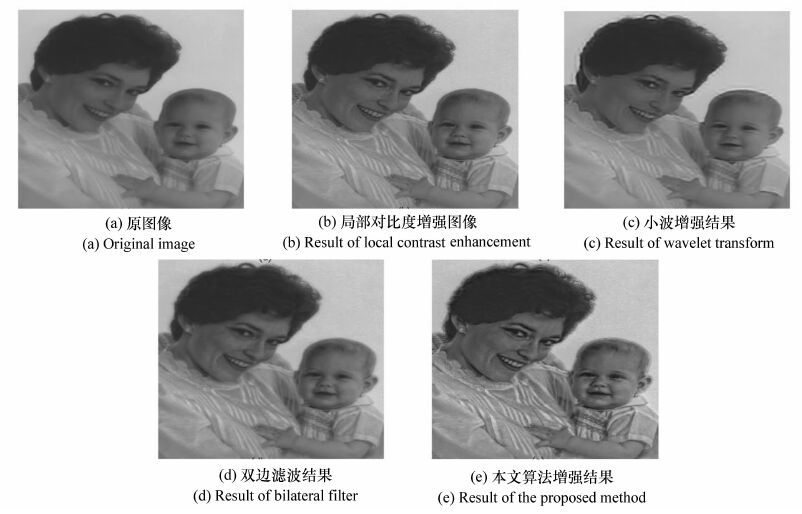
In order to realize image enhancement, especially in texture details, and preserve the structure integrity of image, we propose a multi-scale bilateral texture filter based image decomposition method and a multi-scale adaptive enhancement strategy. First, we decompose the source images by multi-scale bilateral texture filter, and a structure image and a series of detailed images are obtained. Then,we adopt a multi-scale adaptive enhancement for the detailed images. Finally, the enhanced image can be reconstructed by adding the structure based image and the enhanced detailed images. Experiments show that the presented method can enhance the structure information and detailed information in the enhanced image. The proposed method can better reflect the image details, and provide more abundant texture information when introducing the multi-scale bilateral texture filter decomposition into image enhancement.
In order to realize image enhancement, especially in texture details, and preserve the structure integrity of image, we propose a multi-scale bilateral texture filter based image decomposition method and a multi-scale adaptive enhancement strategy. First, we decompose the source images by multi-scale bilateral texture filter, and a structure image and a series of detailed images are obtained. Then,we adopt a multi-scale adaptive enhancement for the detailed images. Finally, the enhanced image can be reconstructed by adding the structure based image and the enhanced detailed images. Experiments show that the presented method can enhance the structure information and detailed information in the enhanced image. The proposed method can better reflect the image details, and provide more abundant texture information when introducing the multi-scale bilateral texture filter decomposition into image enhancement.
2016, 9(4): 432-438.
doi: 10.3788/CO.20160904.0432
Abstract:
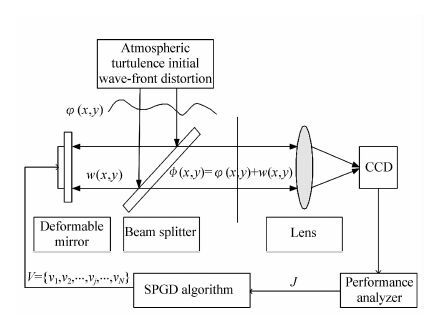
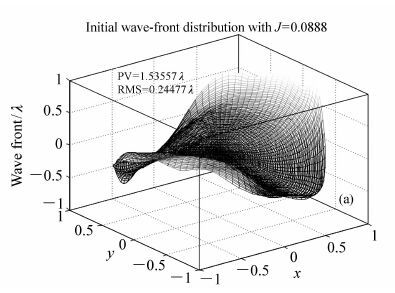
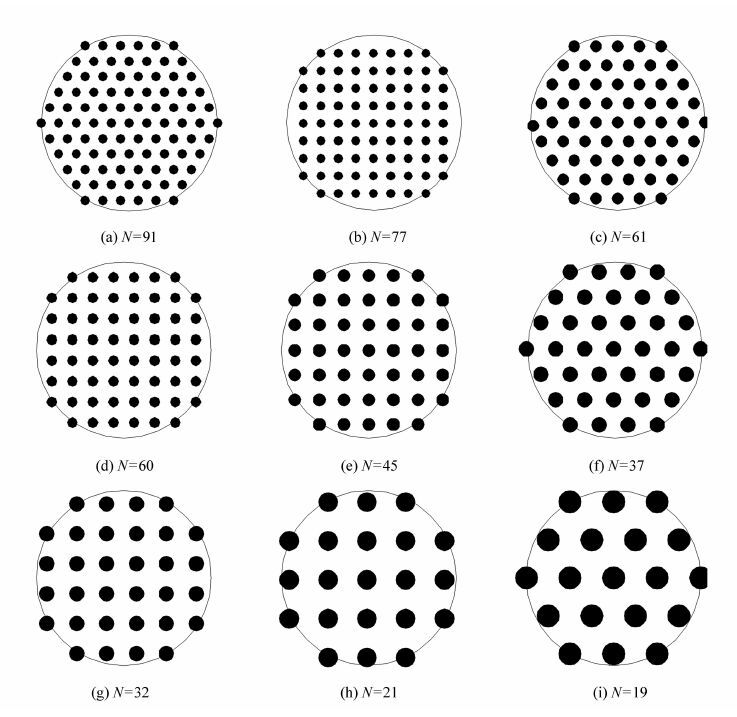
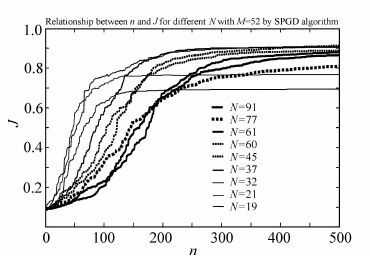
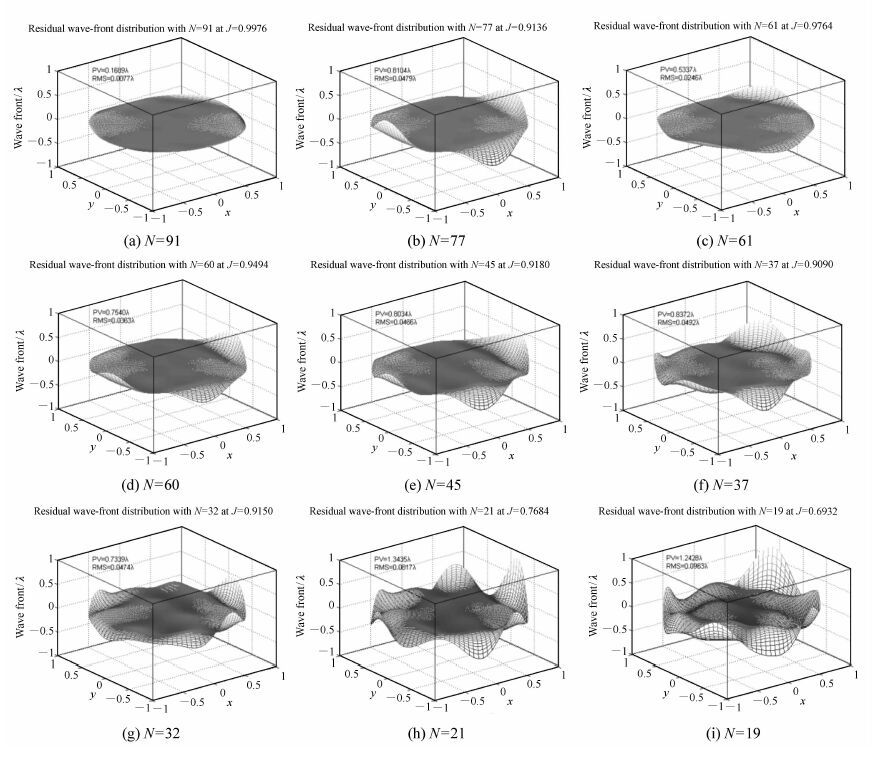
The relationship between the performance of stochastic parallel gradient descent(SPGD) algorithm and distribution rule of deformable mirror is studied in this paper. The study object is distortion wave-front including 52 order Zernike aberrations created with Roddier method. The simulation research mainly focuses on relationship between convergence rate, shaping effect of SPGD algorithm and distribution rule of deformable mirrors with 19, 21, 32, 37, 45, 60, 61, 77, and 91 units. The results show that from the general analysis, the convergence and shaping effects of SPGD algorithm gradually become worse with actuator number of deformable mirror increases, but from the partial analysis, this trend create local difference due to different cell type and void ratio in the edge of deformable mirror.
The relationship between the performance of stochastic parallel gradient descent(SPGD) algorithm and distribution rule of deformable mirror is studied in this paper. The study object is distortion wave-front including 52 order Zernike aberrations created with Roddier method. The simulation research mainly focuses on relationship between convergence rate, shaping effect of SPGD algorithm and distribution rule of deformable mirrors with 19, 21, 32, 37, 45, 60, 61, 77, and 91 units. The results show that from the general analysis, the convergence and shaping effects of SPGD algorithm gradually become worse with actuator number of deformable mirror increases, but from the partial analysis, this trend create local difference due to different cell type and void ratio in the edge of deformable mirror.
2016, 9(4): 439-451.
doi: 10.3788/CO.20160904.0439
Abstract:
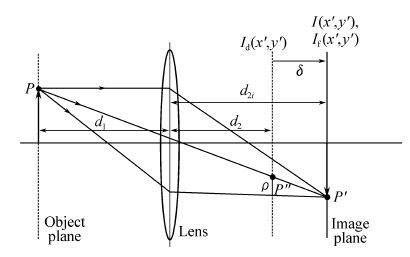
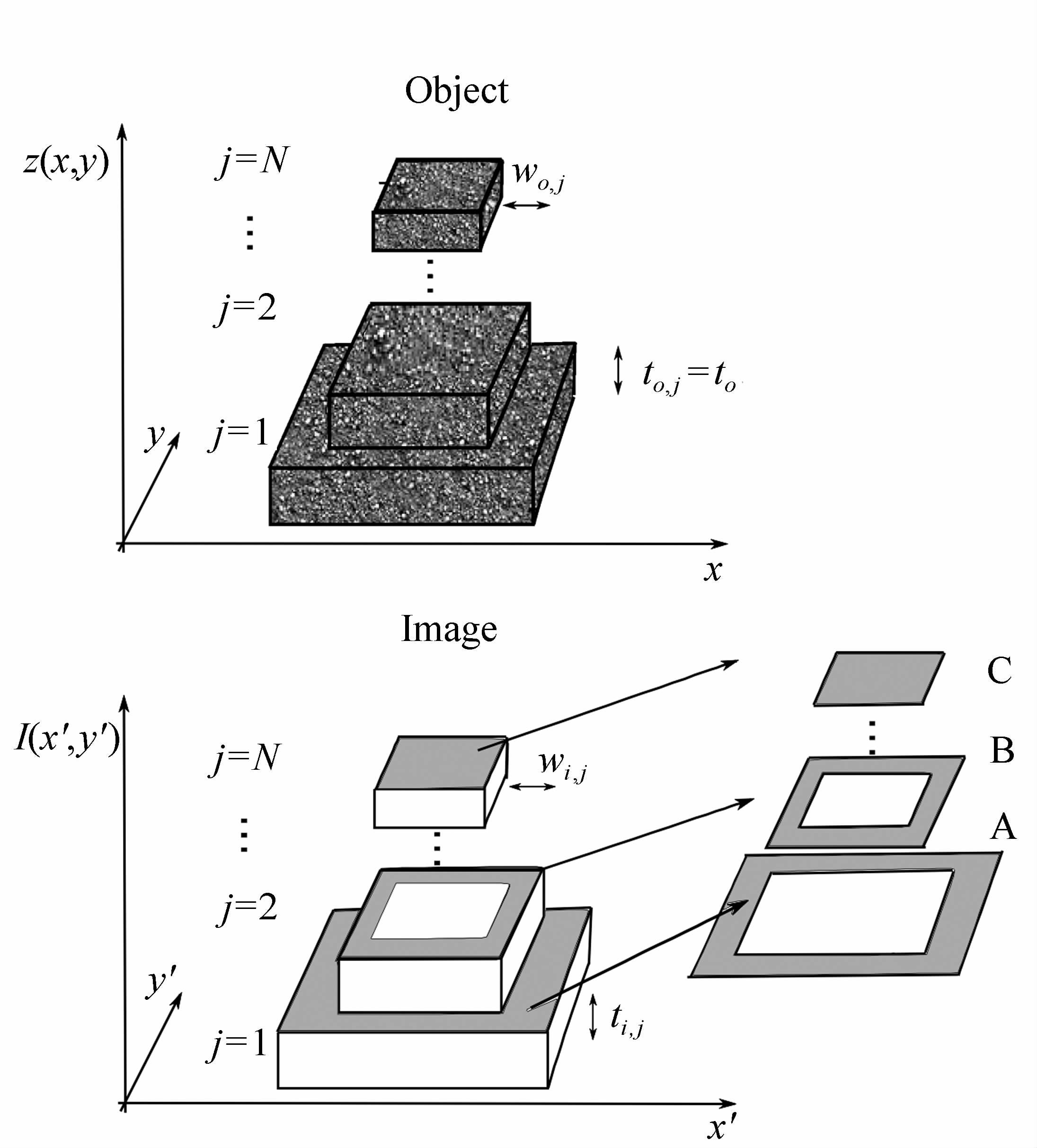
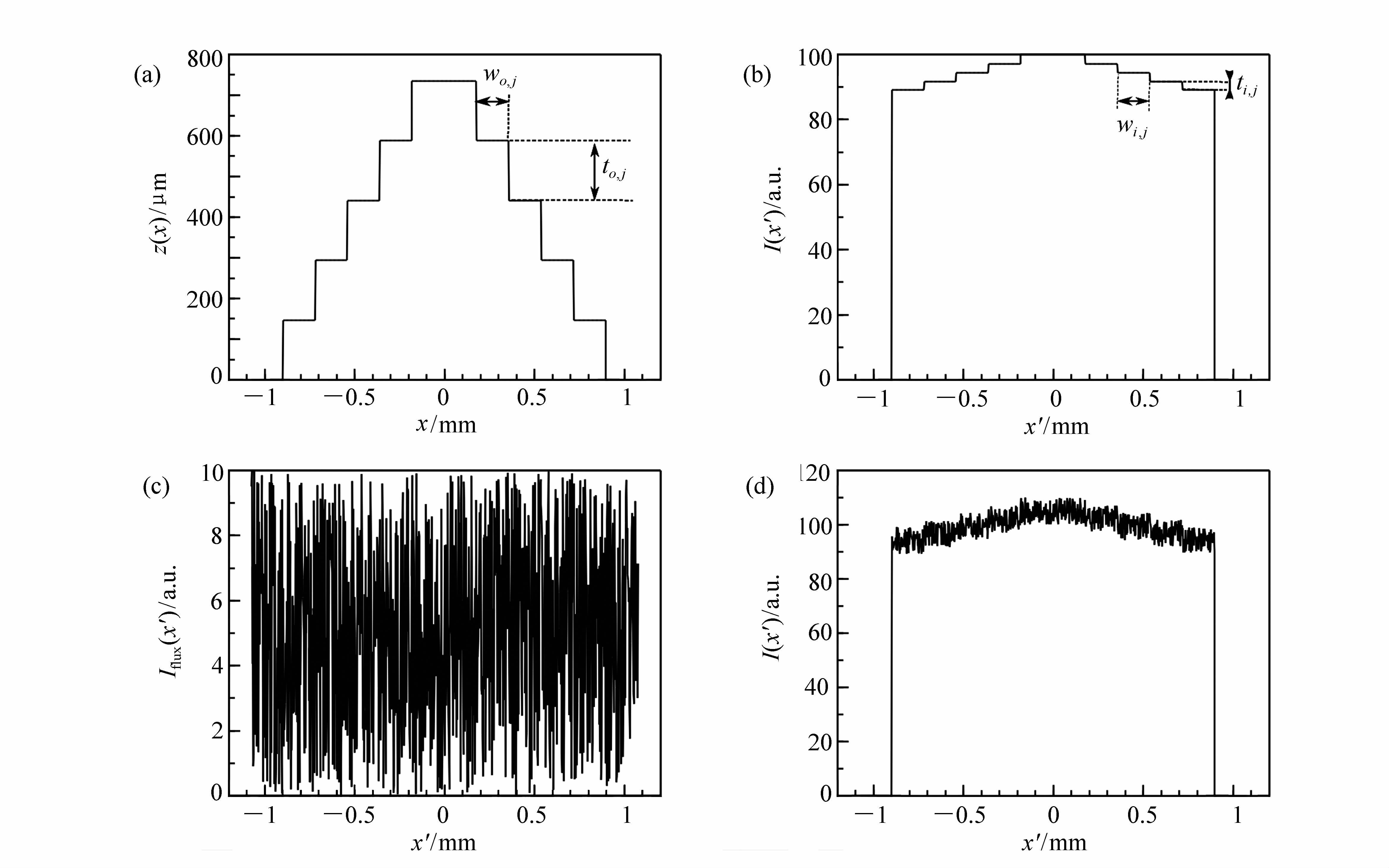
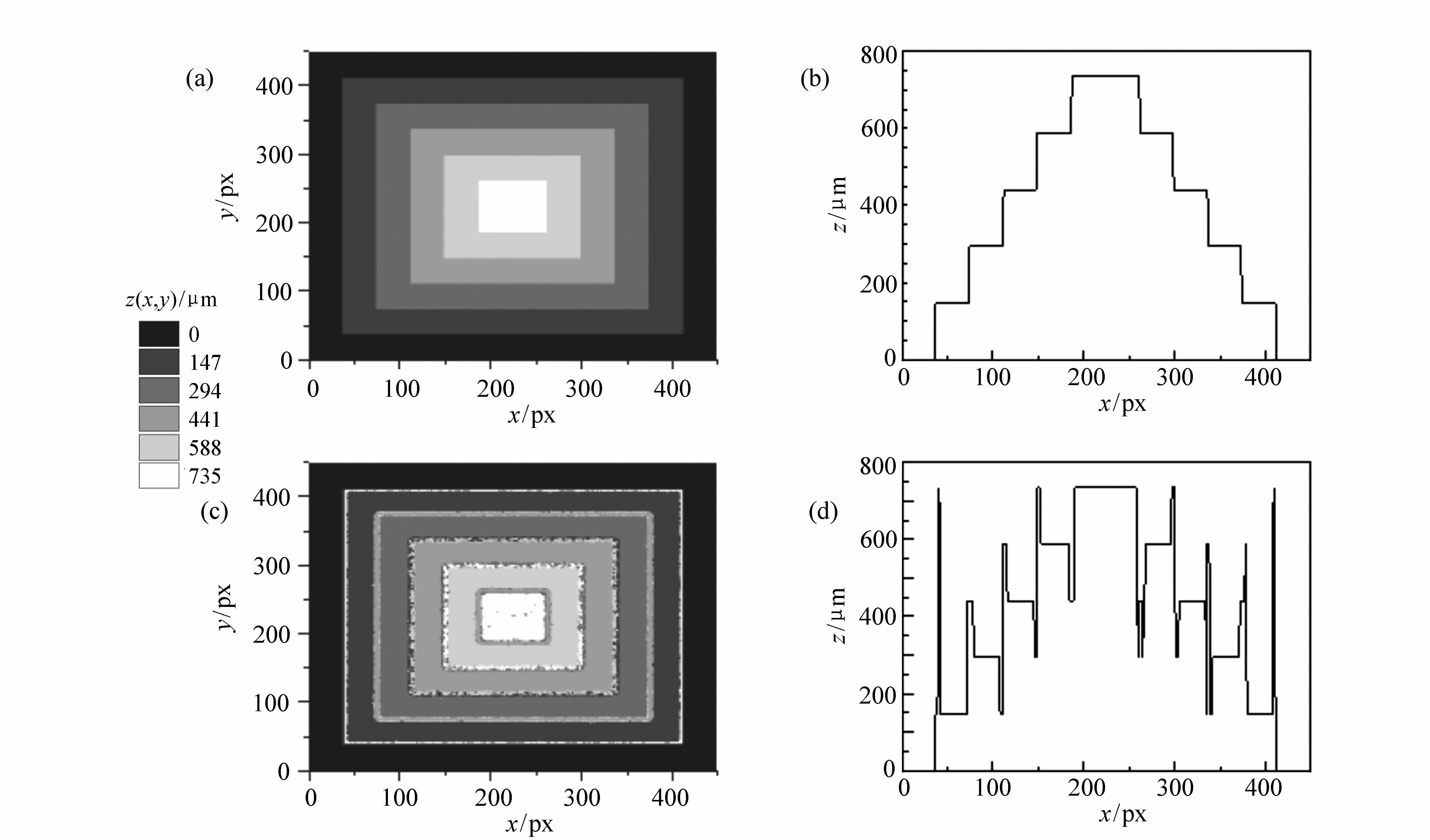
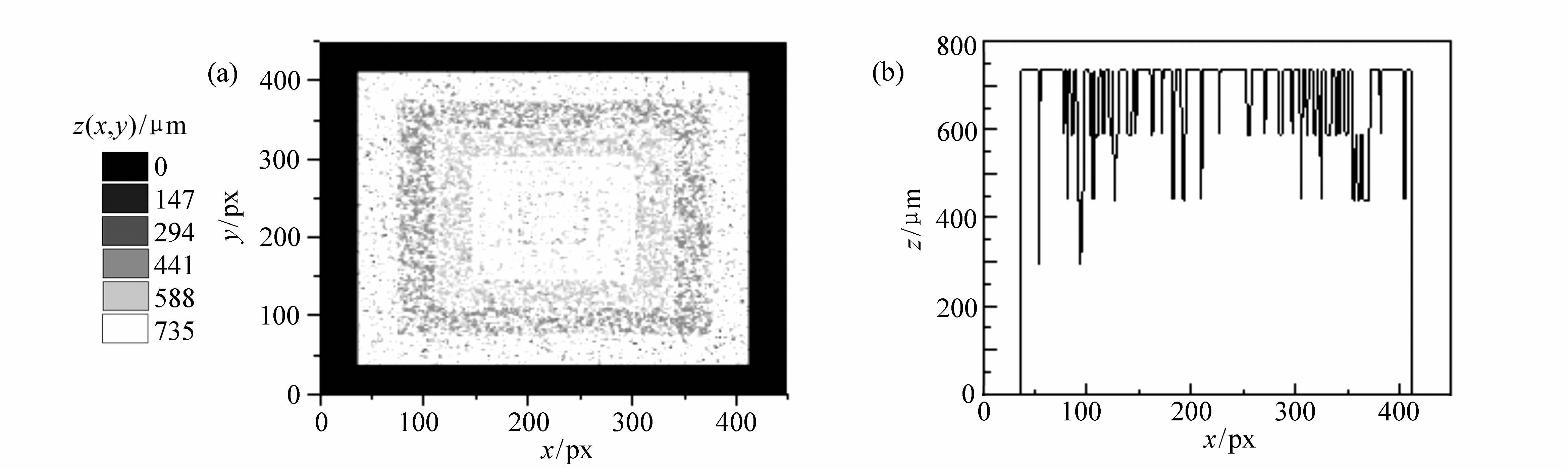
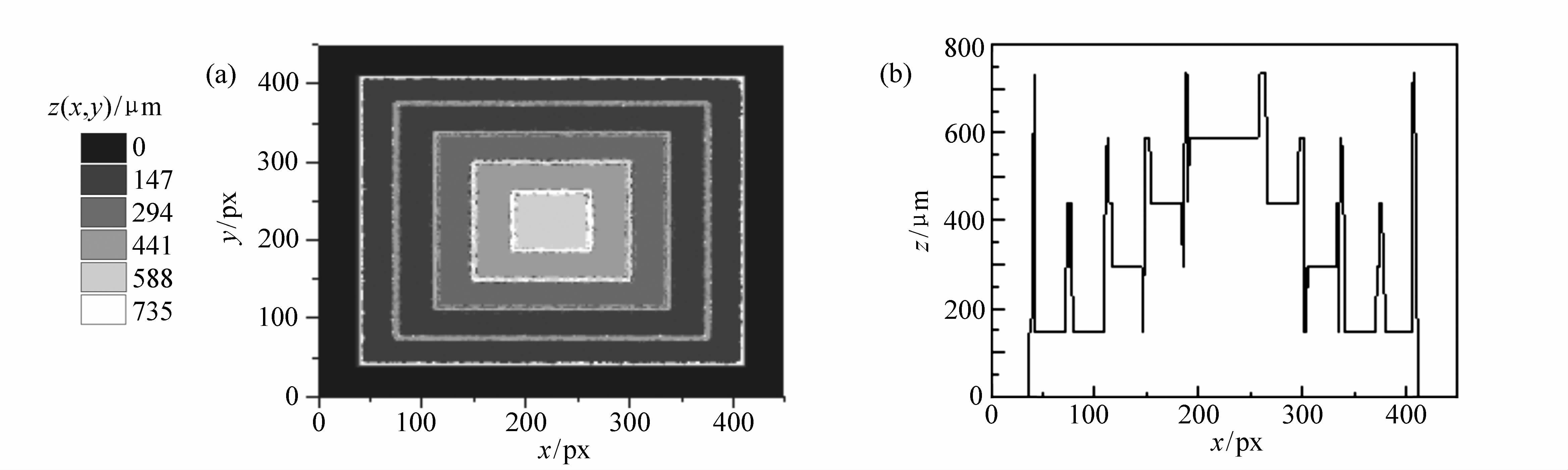
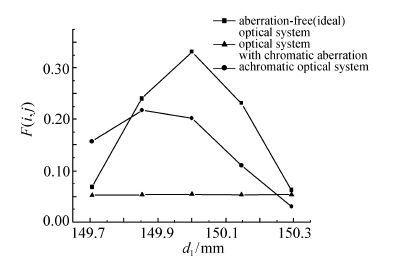
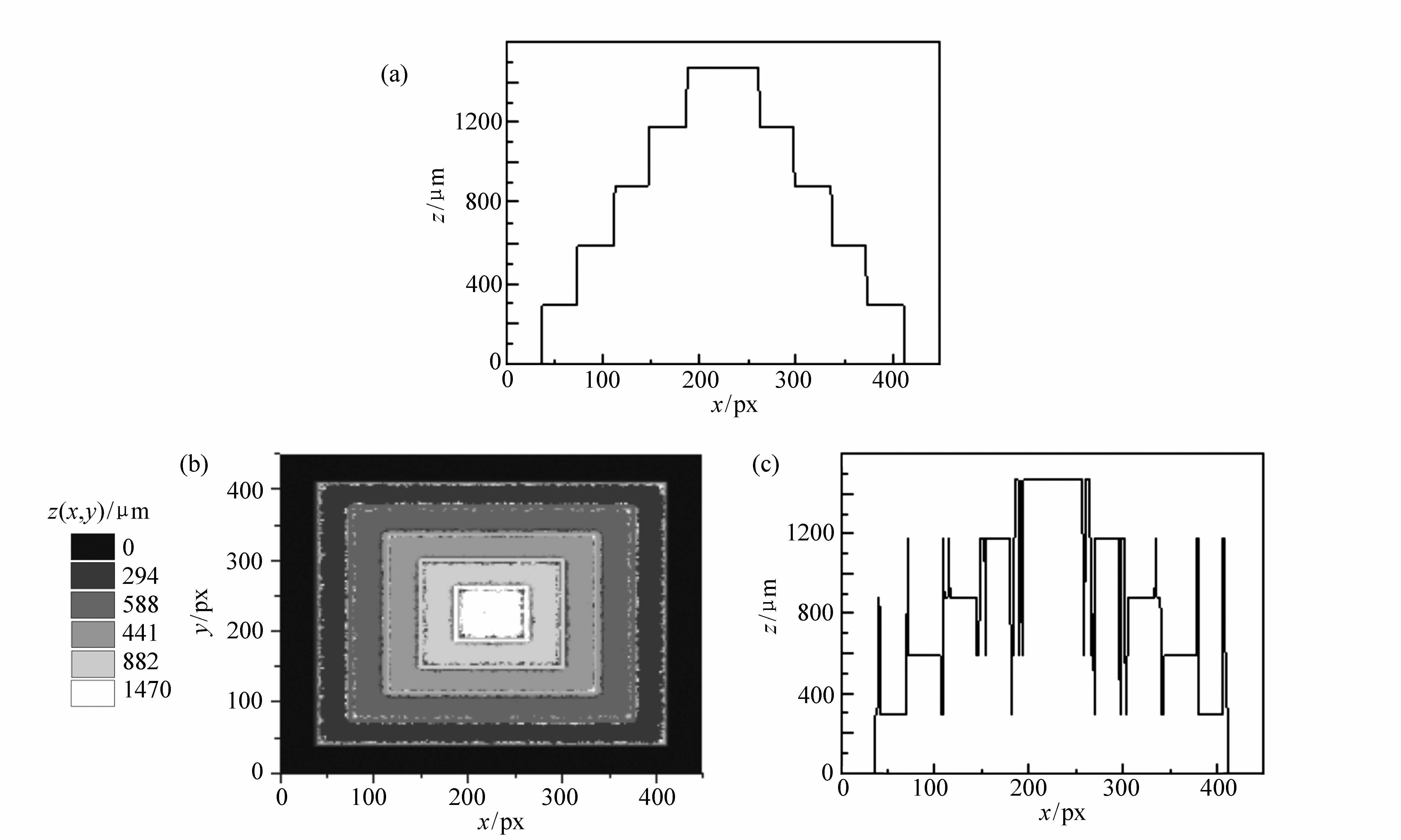
We propose a numerical model for simulation of an object depth measurement by means of a shape from focus method using Laplacian operator. The core of the simulation is based on convolution of an ideal image (predicted by the geometrical optics) with polychromatic point spread functions of a generalized aperture function of lens including focus error instead of more exploited the pillbox shape or the Gaussian functions. The model allows to employ parameters of real components of the sensor based on the method, a light source spectrum, dispersion of an optical system and spectral sensitivity of a camera. The influence of dispersion of optical systems (aberration-free, achromatic and with chromatic aberration) on accuracy and reliability of the determination of the object's surface topography is presented. It is indicated that this model can increase the experiment effectively and decrease time lag with the reducing of operating expenses.
We propose a numerical model for simulation of an object depth measurement by means of a shape from focus method using Laplacian operator. The core of the simulation is based on convolution of an ideal image (predicted by the geometrical optics) with polychromatic point spread functions of a generalized aperture function of lens including focus error instead of more exploited the pillbox shape or the Gaussian functions. The model allows to employ parameters of real components of the sensor based on the method, a light source spectrum, dispersion of an optical system and spectral sensitivity of a camera. The influence of dispersion of optical systems (aberration-free, achromatic and with chromatic aberration) on accuracy and reliability of the determination of the object's surface topography is presented. It is indicated that this model can increase the experiment effectively and decrease time lag with the reducing of operating expenses.

2016, 9(4): 452-462.
doi: 10.3788/CO.20160904.0452
Abstract:
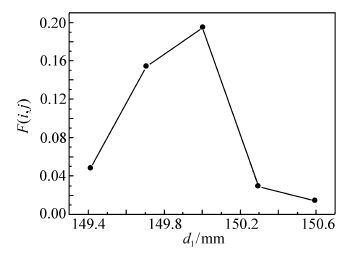
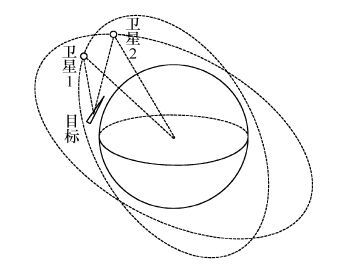
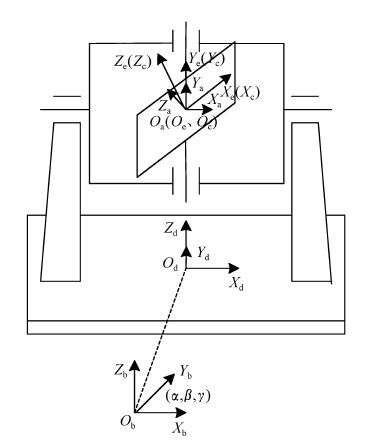
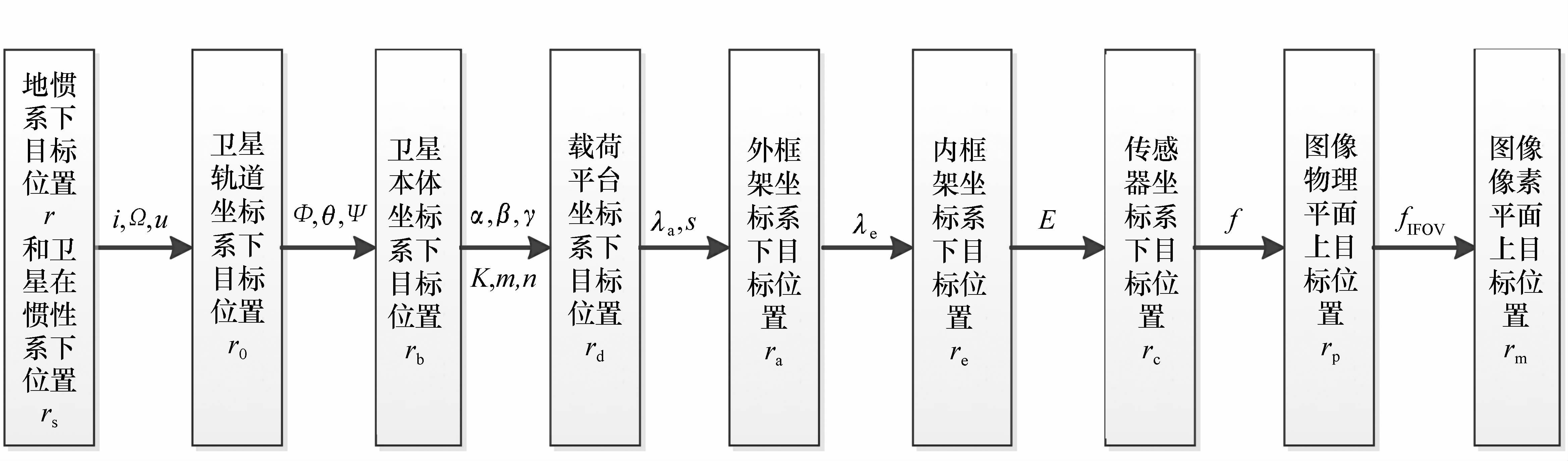
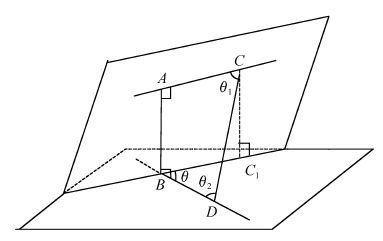
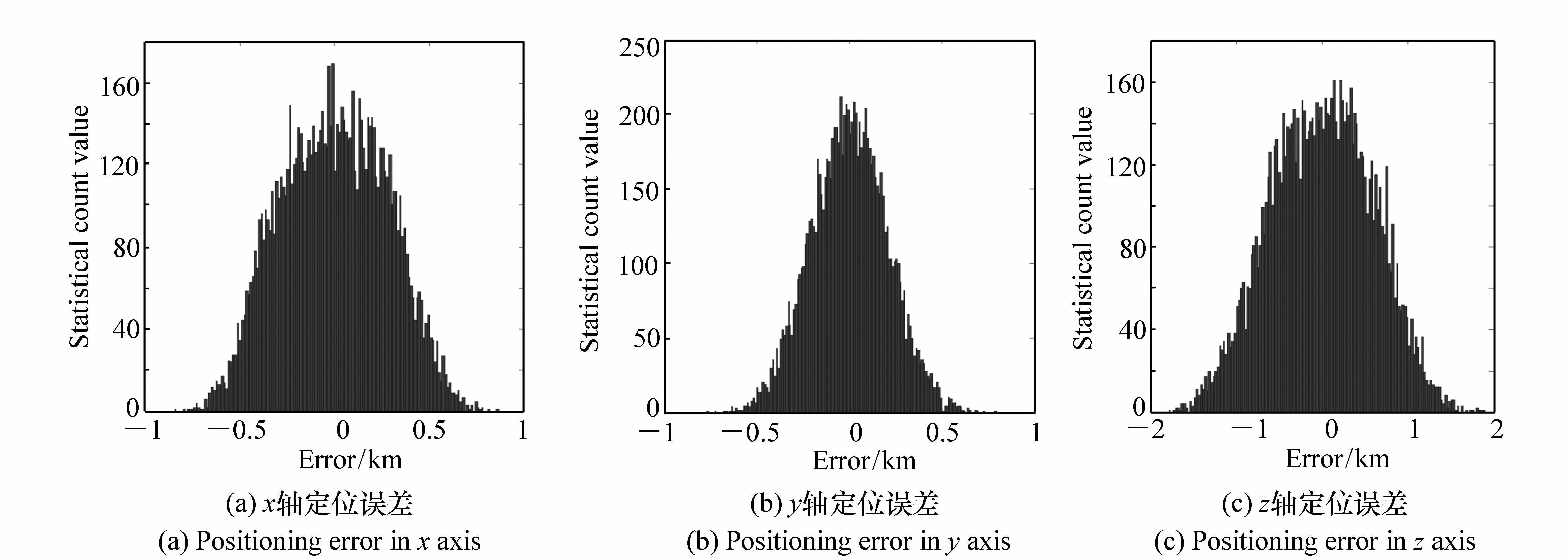
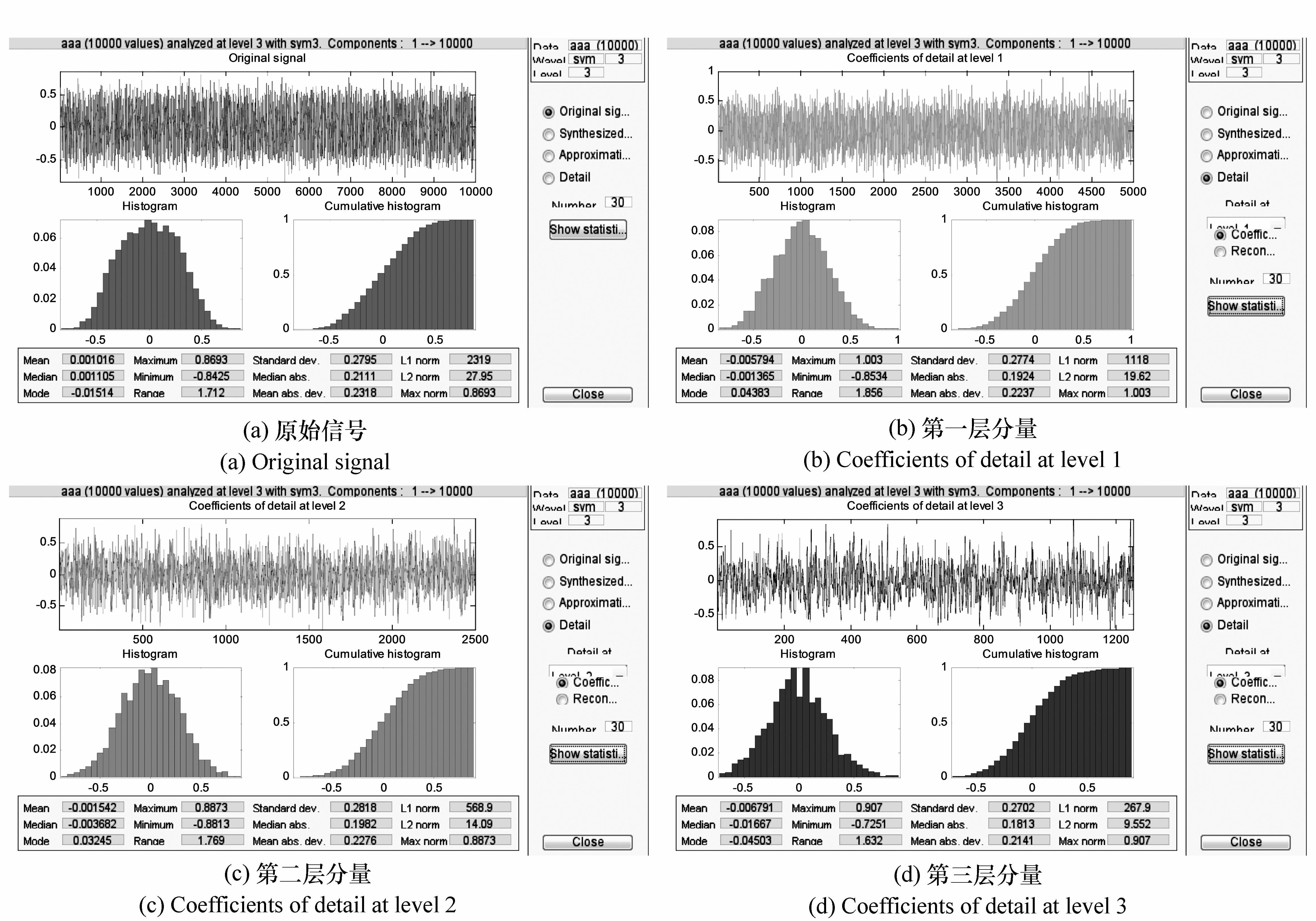
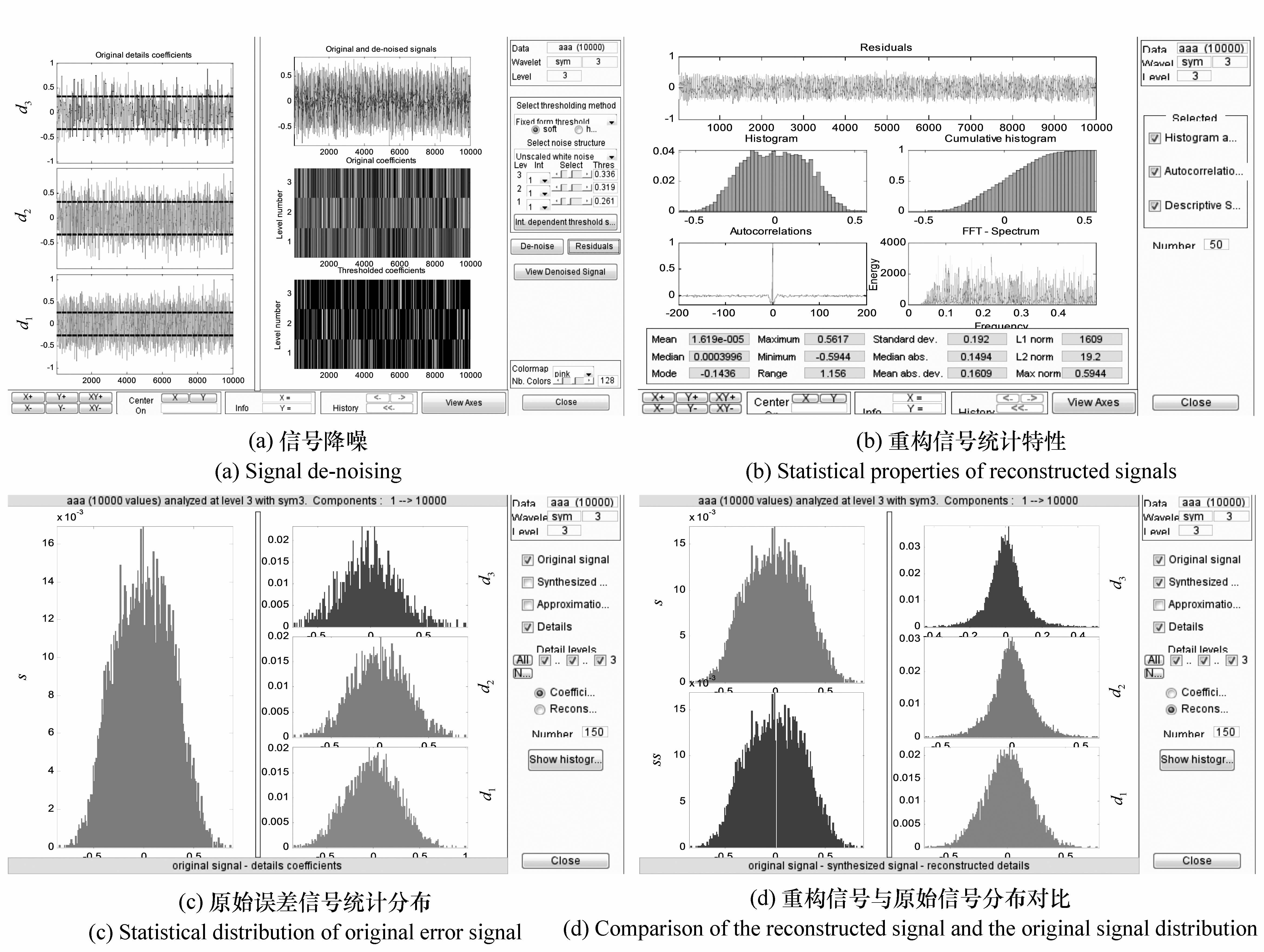
In order to improve the positioning accuracy of double satellites optical observation system, a new type of optical positioning system is constructed. Based on the modeling of the satellite and the optical observation platform, the observation vector model between the platform and the target is constructed. According to the geometric location algorithm, the target location model and the location error model are derived, and the location error distribution is obtained by the Monte Carlo method. On this basis, wavelet theory is brought to optimize and reconstruct error for improving the positioning accuracy of double satellites optical observation system. Using the measured data for simulation, the results show that the wavelet theory introduced to reconstruct the position error can make the positioning accuracy increase by 30%. It provides a new way to reduce the location error in engineering.
In order to improve the positioning accuracy of double satellites optical observation system, a new type of optical positioning system is constructed. Based on the modeling of the satellite and the optical observation platform, the observation vector model between the platform and the target is constructed. According to the geometric location algorithm, the target location model and the location error model are derived, and the location error distribution is obtained by the Monte Carlo method. On this basis, wavelet theory is brought to optimize and reconstruct error for improving the positioning accuracy of double satellites optical observation system. Using the measured data for simulation, the results show that the wavelet theory introduced to reconstruct the position error can make the positioning accuracy increase by 30%. It provides a new way to reduce the location error in engineering.



2016, 9(4): 463-471.
doi: 10.3788/CO.20160904.0463
Abstract:
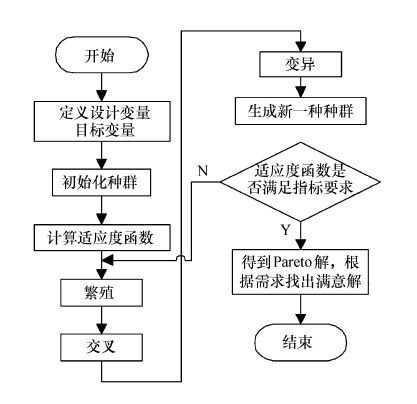
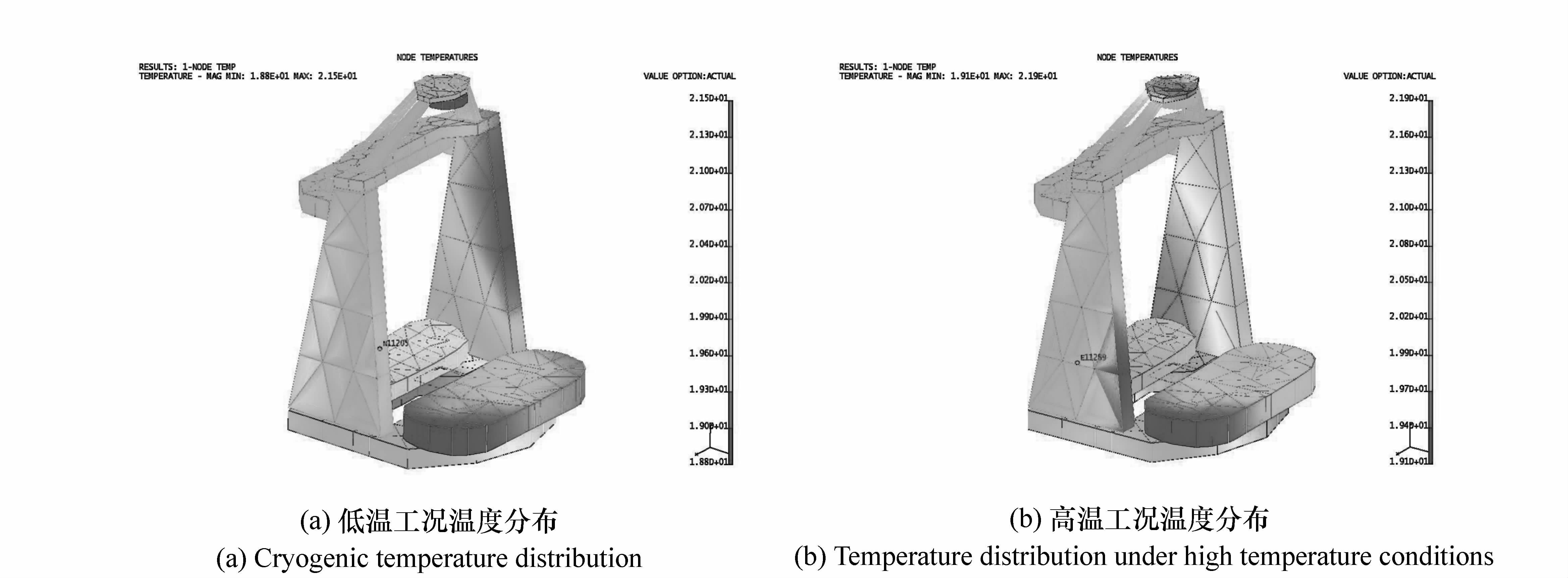
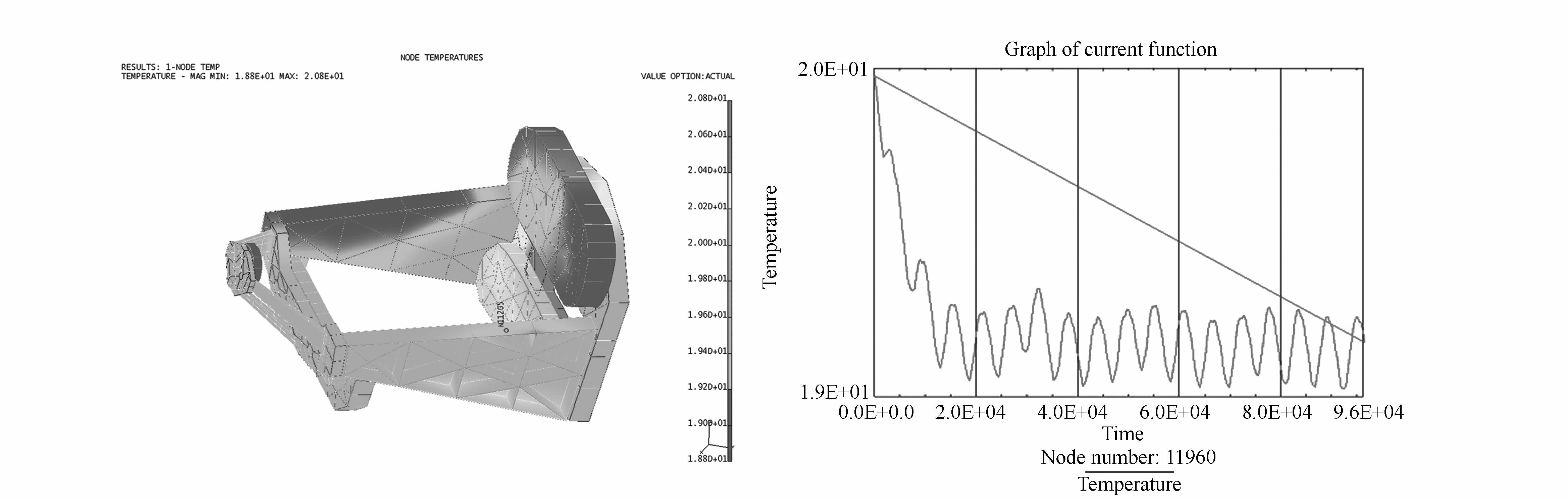
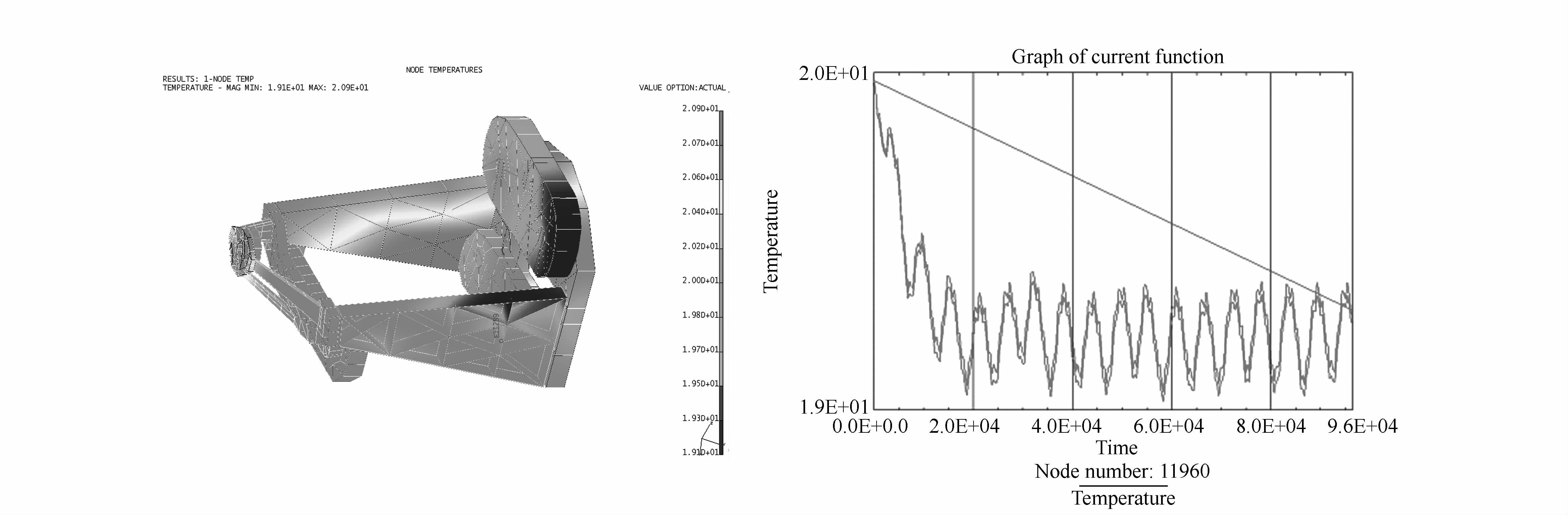
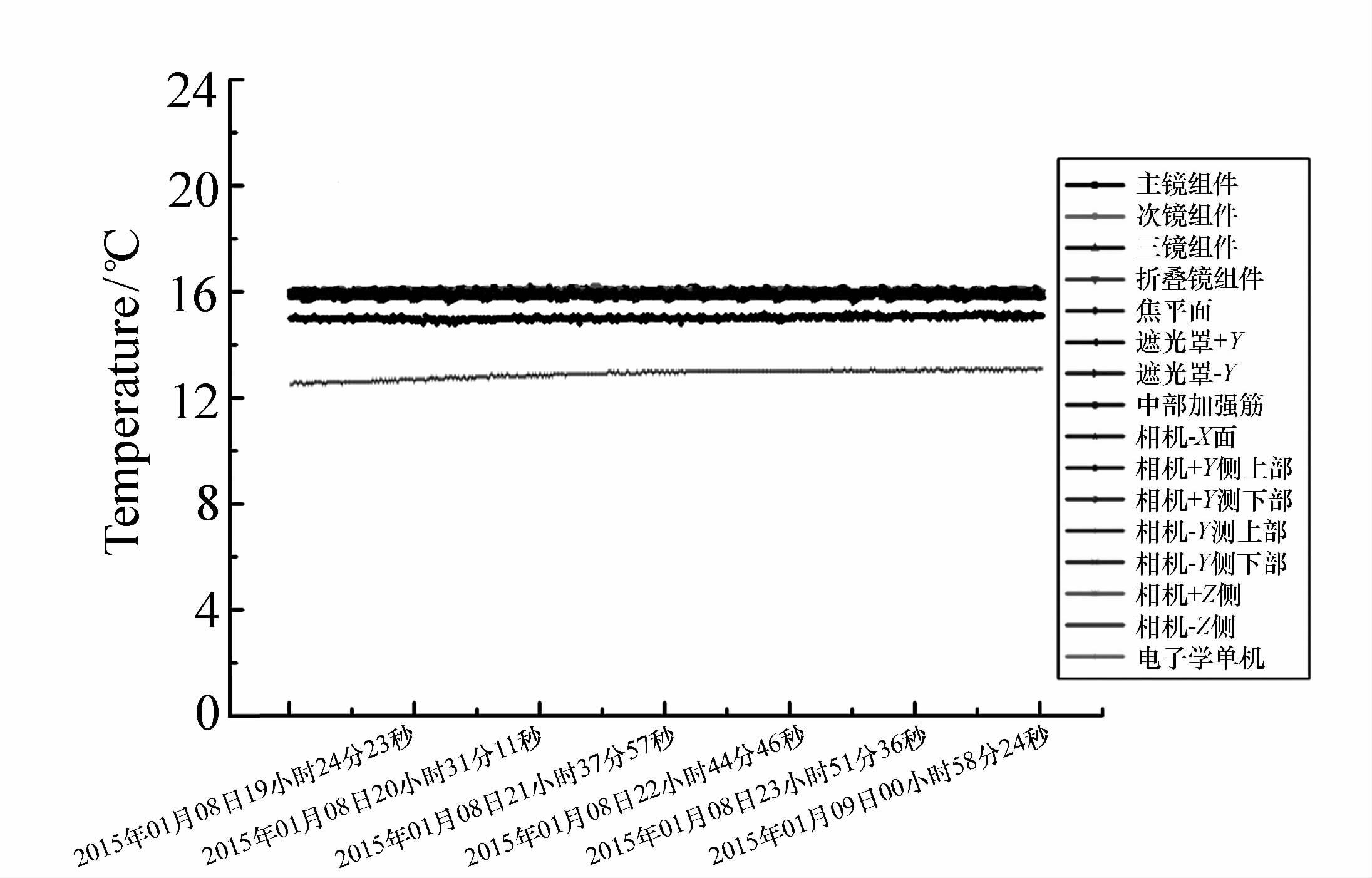
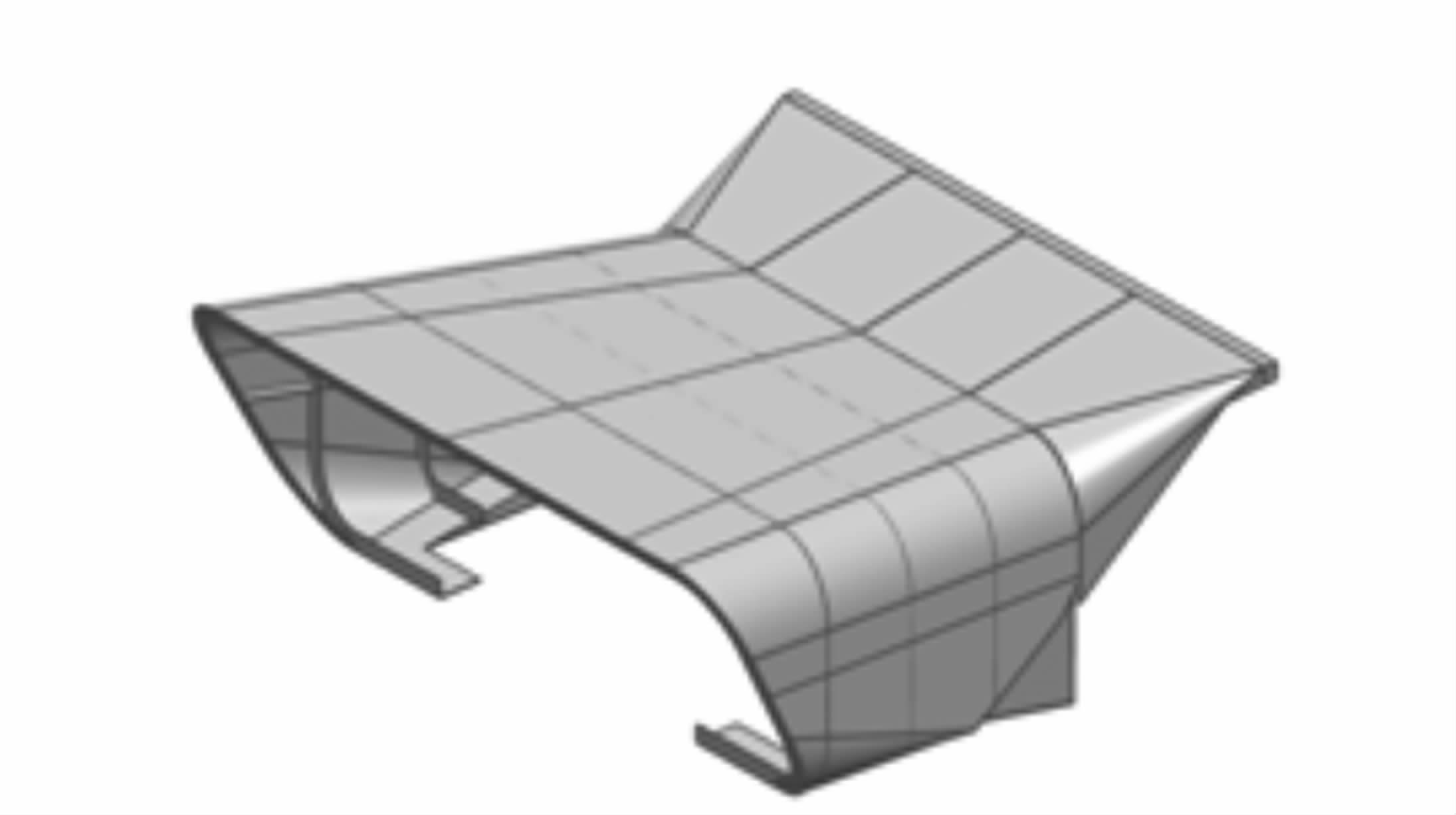
As for active thermal control problem of minimum power allocation in space optical remote sensor with large diameter, off-axis, symmetric structure, a power optimization method based on multi objective genetic algorithm is proposed in this paper. First of all, according to the spatial structure of the camera a finite element model is created. The next, heat distribution is divided by the experience of the designer's depending on the camera structural characteristics. Design variables and target variables are selected. Then, we plug the design variables and target variables into the multiple objective genetic algorithm and Pareto sets are obtained. Finally, suitable power allocation is selected from the set of optimal solution and substituted into the simulation model. Then the optimization of power distribution and temperature field are obtained. In this paper an off-axis three mirrors space camera is optimized and tested. After optimization and TMG simulation, the total temperature difference is reduced by 4.76% under low temperature condition and 35.7% under high temperature condition. The result of the heat balance shows that the temperature field of the whole camera is controlled within ±0.5 ℃ or less, which is far less than the target requirements of ±2 ℃.
As for active thermal control problem of minimum power allocation in space optical remote sensor with large diameter, off-axis, symmetric structure, a power optimization method based on multi objective genetic algorithm is proposed in this paper. First of all, according to the spatial structure of the camera a finite element model is created. The next, heat distribution is divided by the experience of the designer's depending on the camera structural characteristics. Design variables and target variables are selected. Then, we plug the design variables and target variables into the multiple objective genetic algorithm and Pareto sets are obtained. Finally, suitable power allocation is selected from the set of optimal solution and substituted into the simulation model. Then the optimization of power distribution and temperature field are obtained. In this paper an off-axis three mirrors space camera is optimized and tested. After optimization and TMG simulation, the total temperature difference is reduced by 4.76% under low temperature condition and 35.7% under high temperature condition. The result of the heat balance shows that the temperature field of the whole camera is controlled within ±0.5 ℃ or less, which is far less than the target requirements of ±2 ℃.




2016, 9(4): 472-482.
doi: 10.3788/CO.20160904.0472
Abstract:
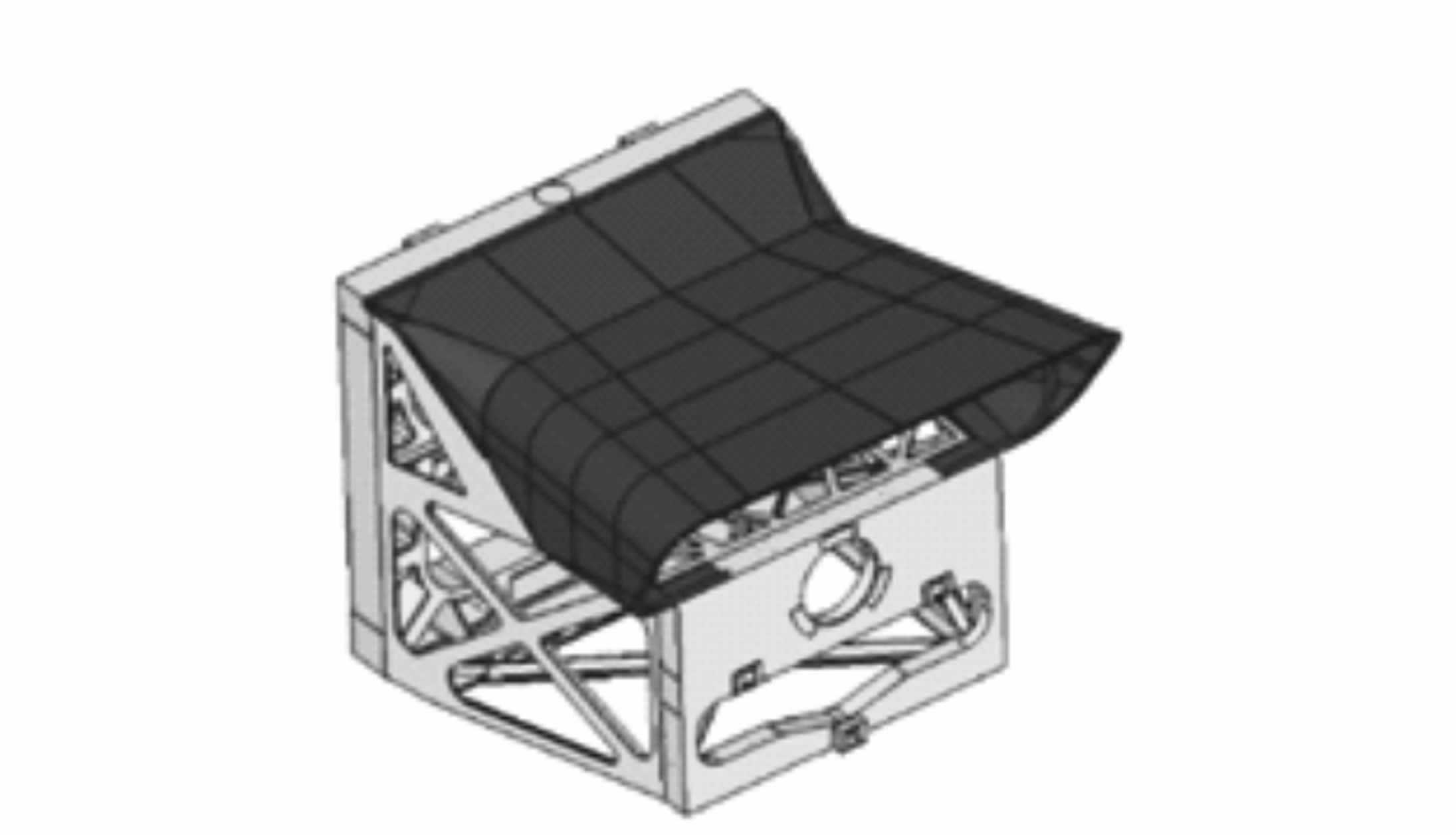
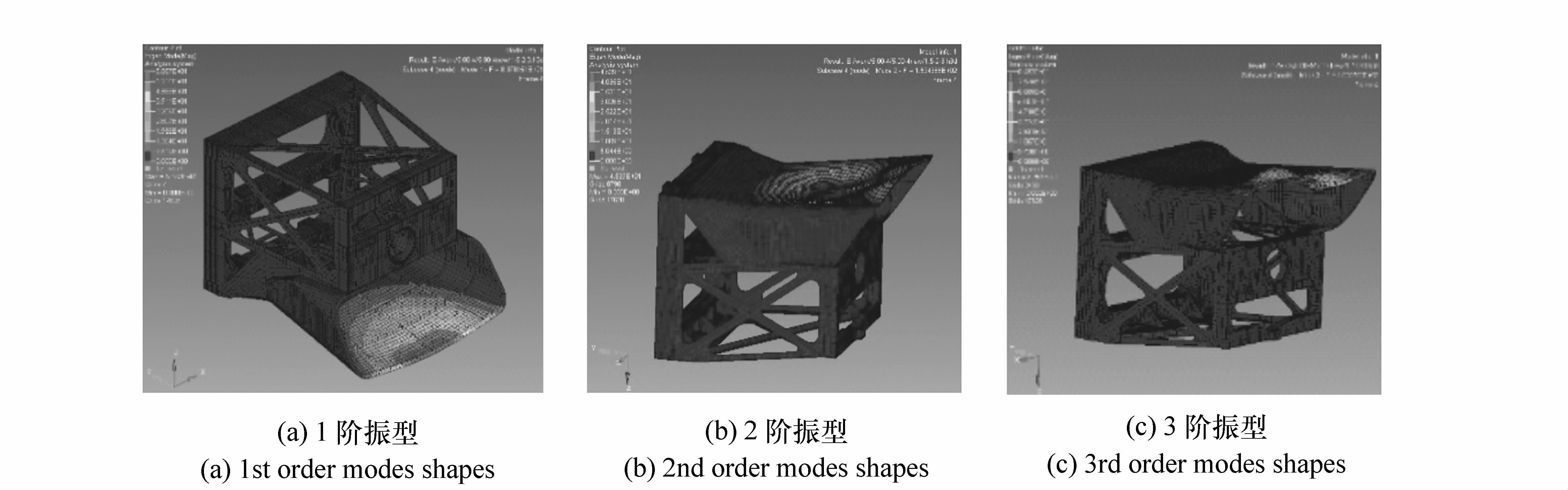
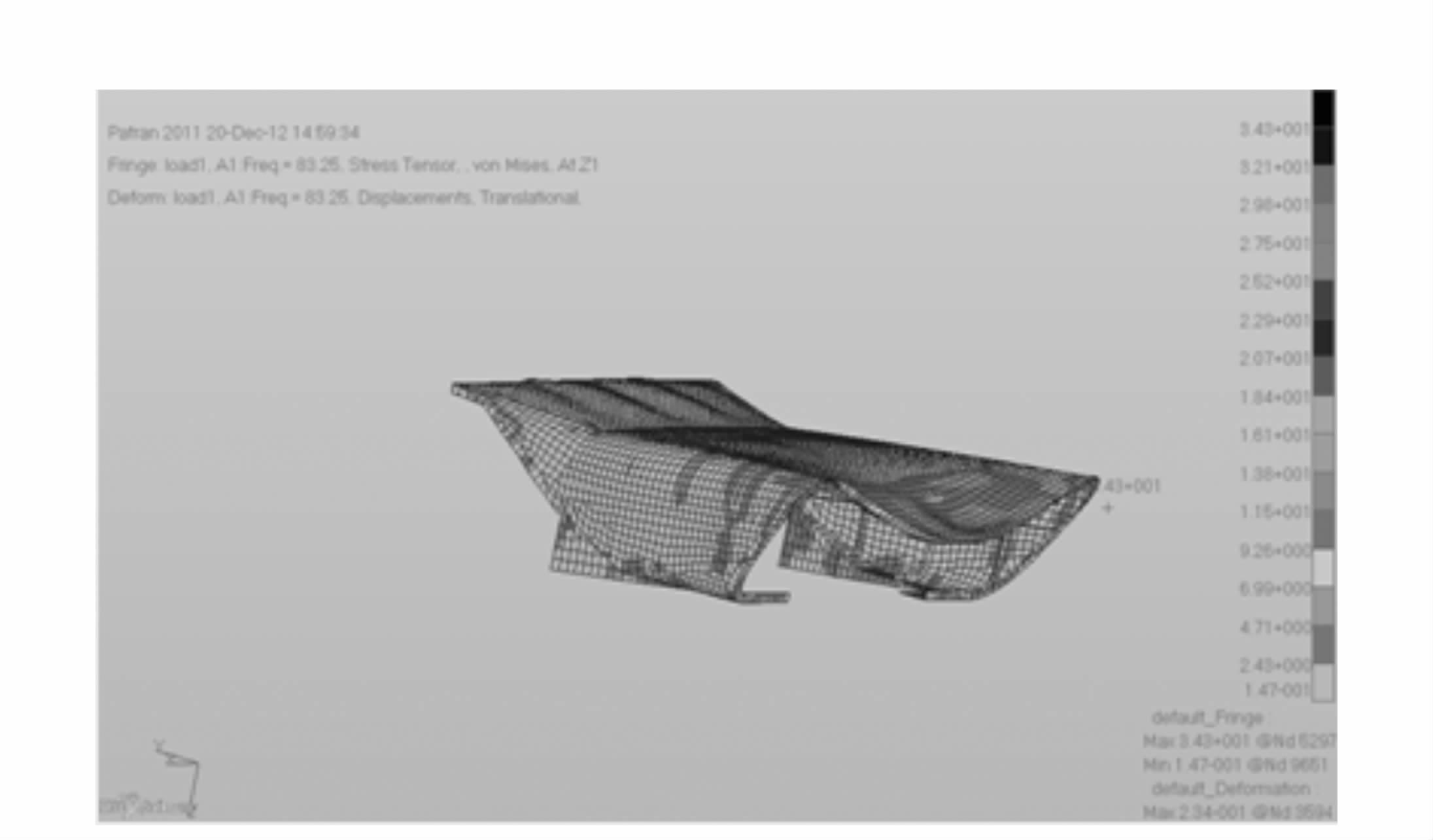
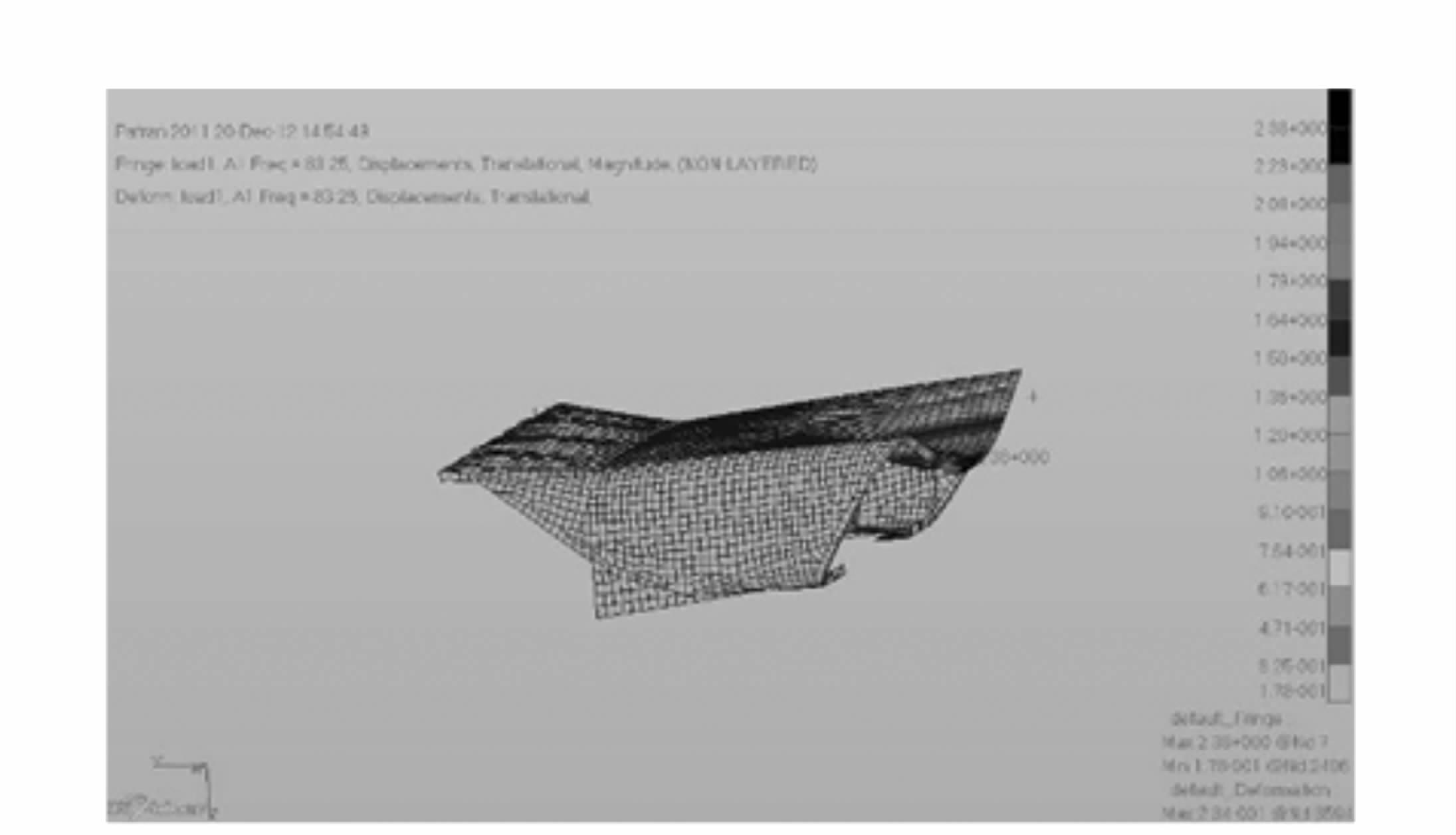
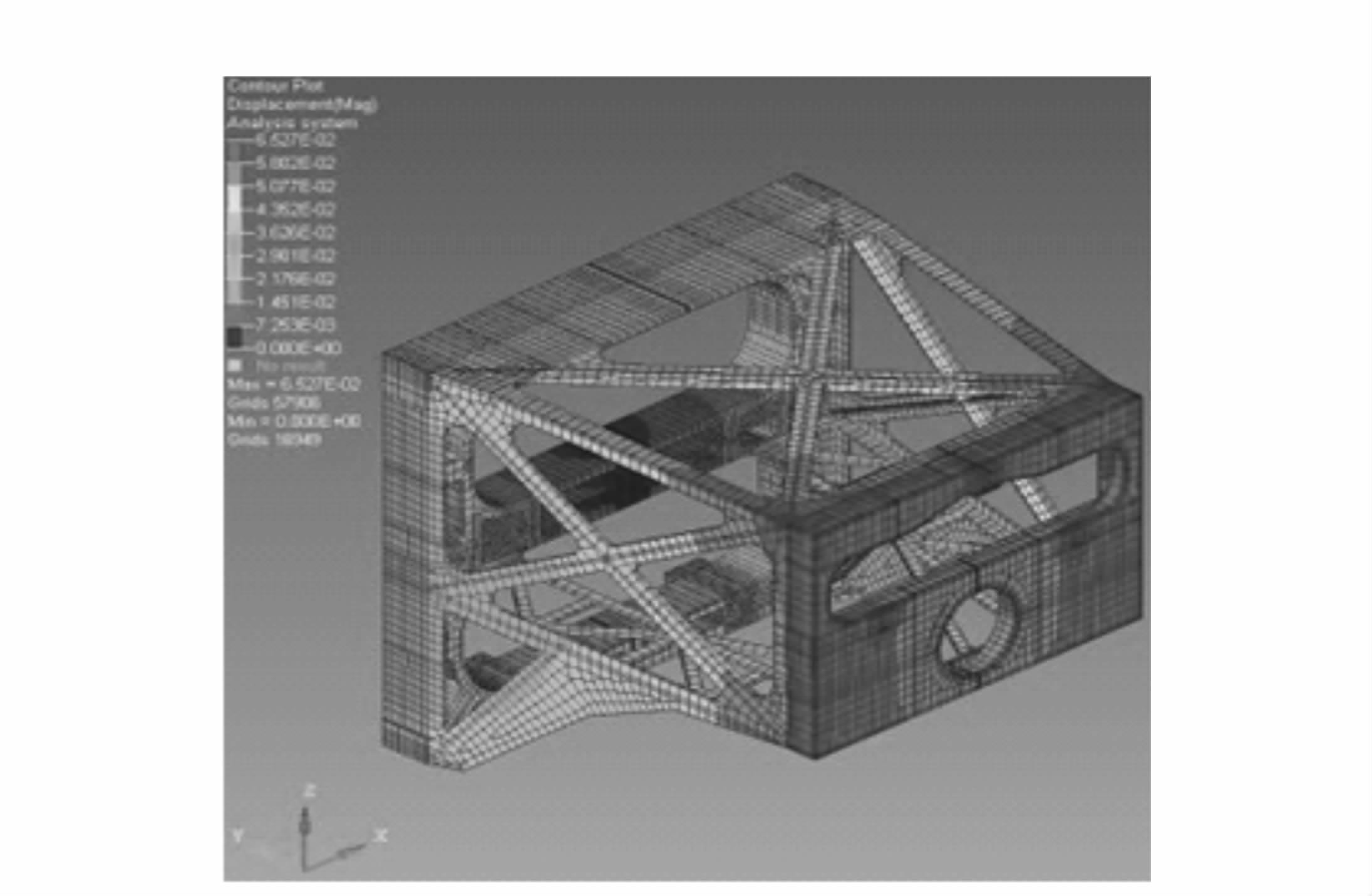
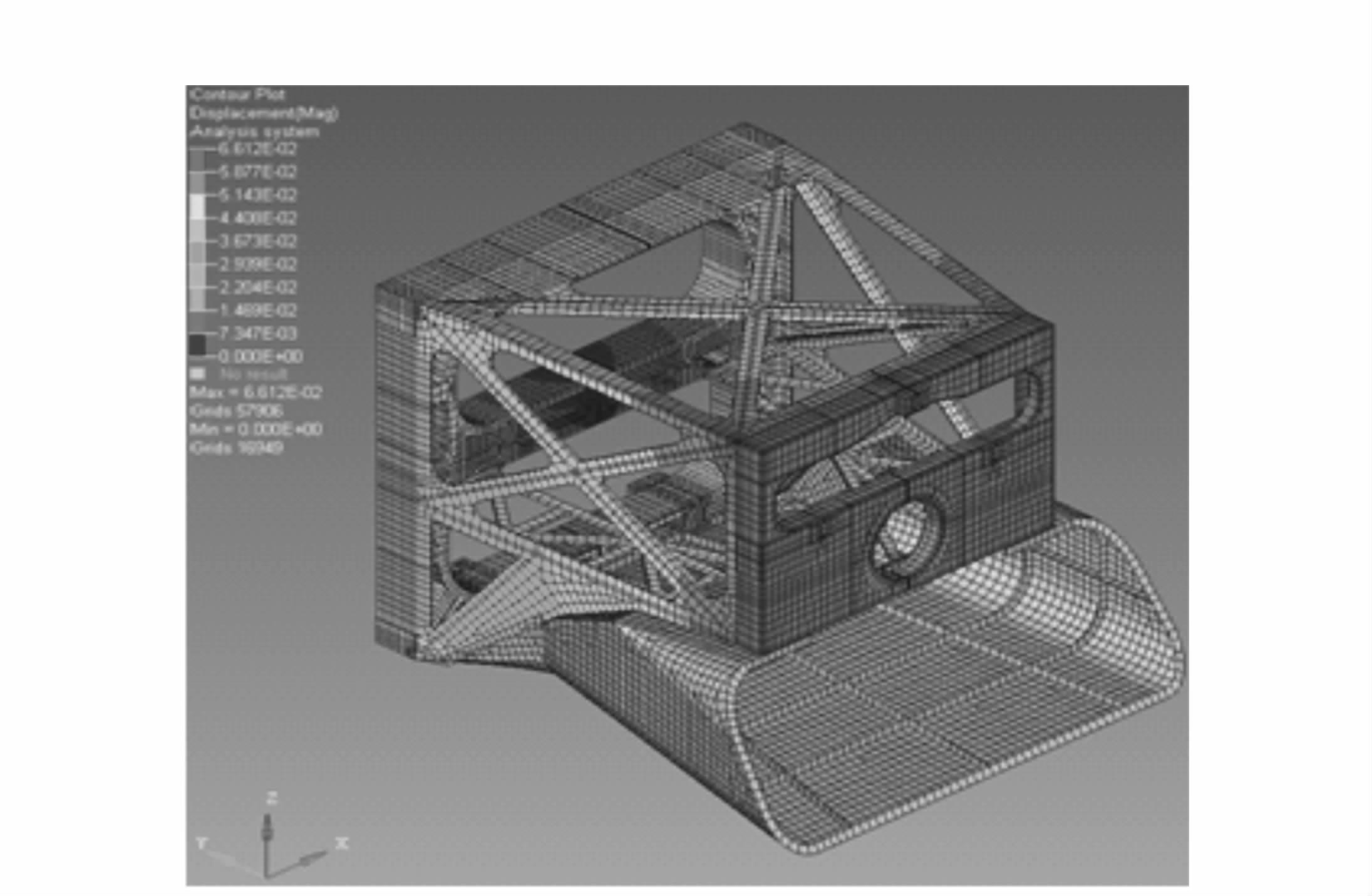
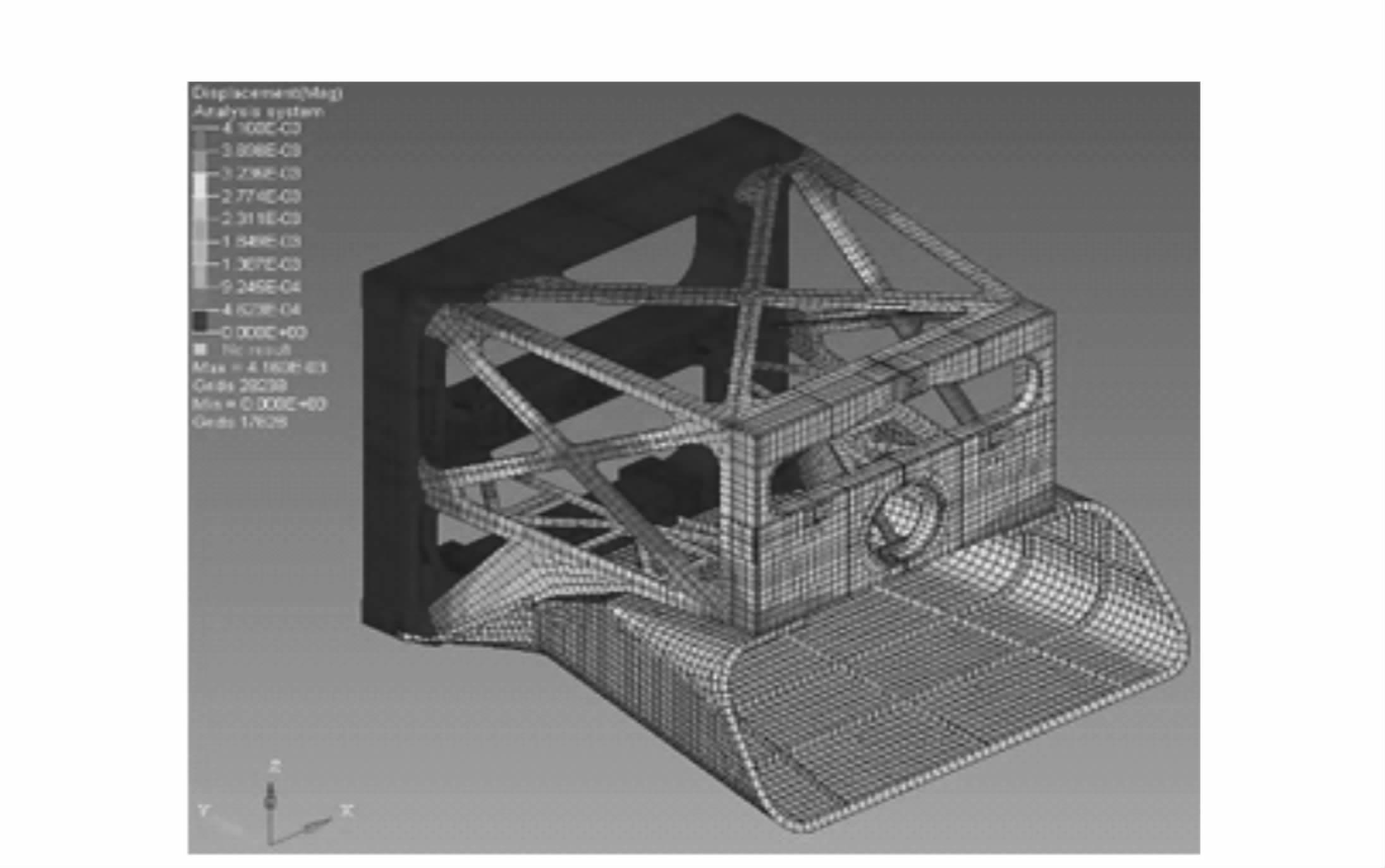
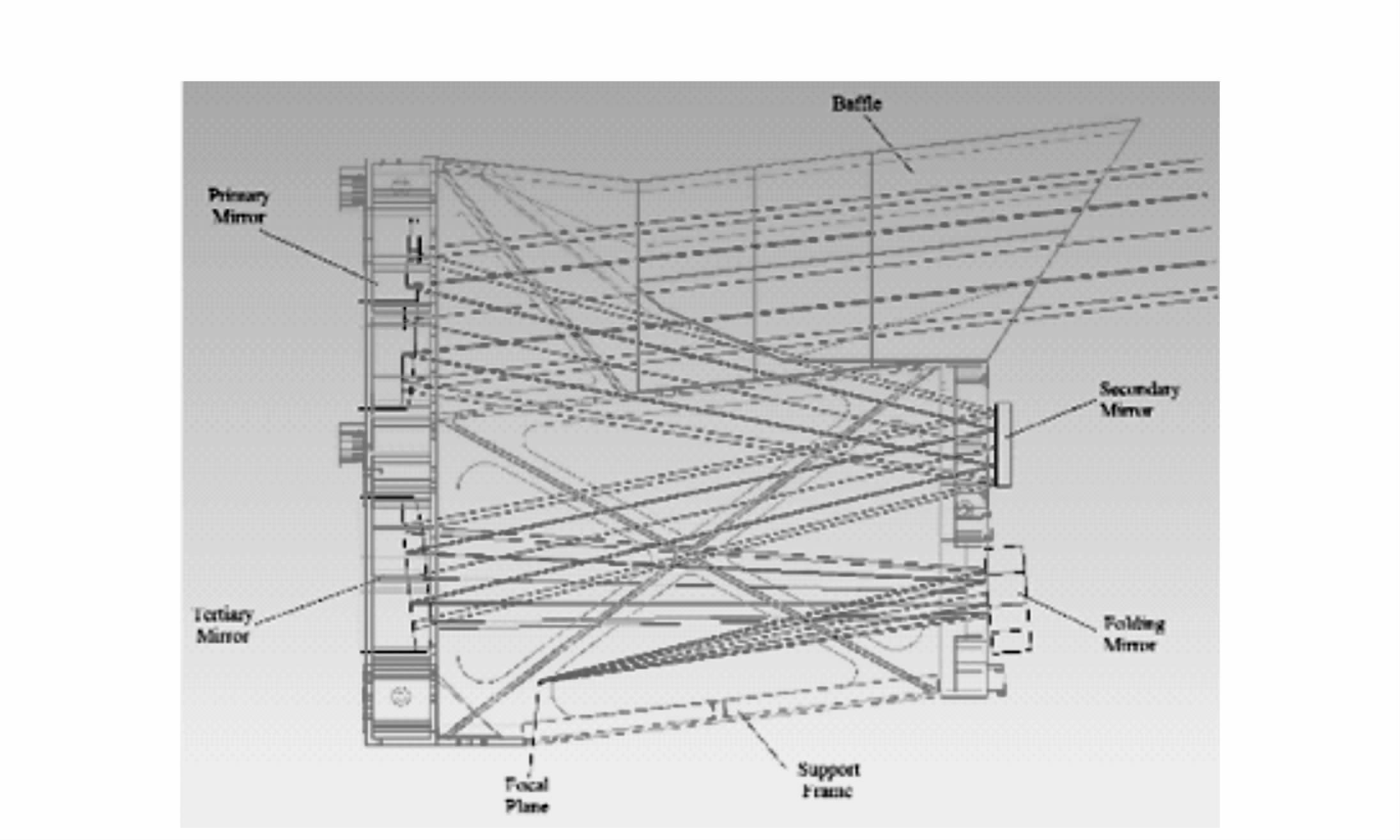
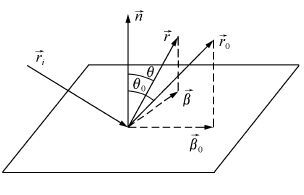
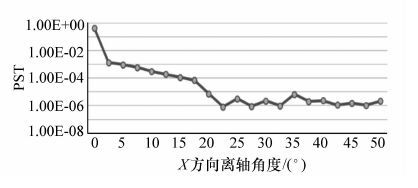
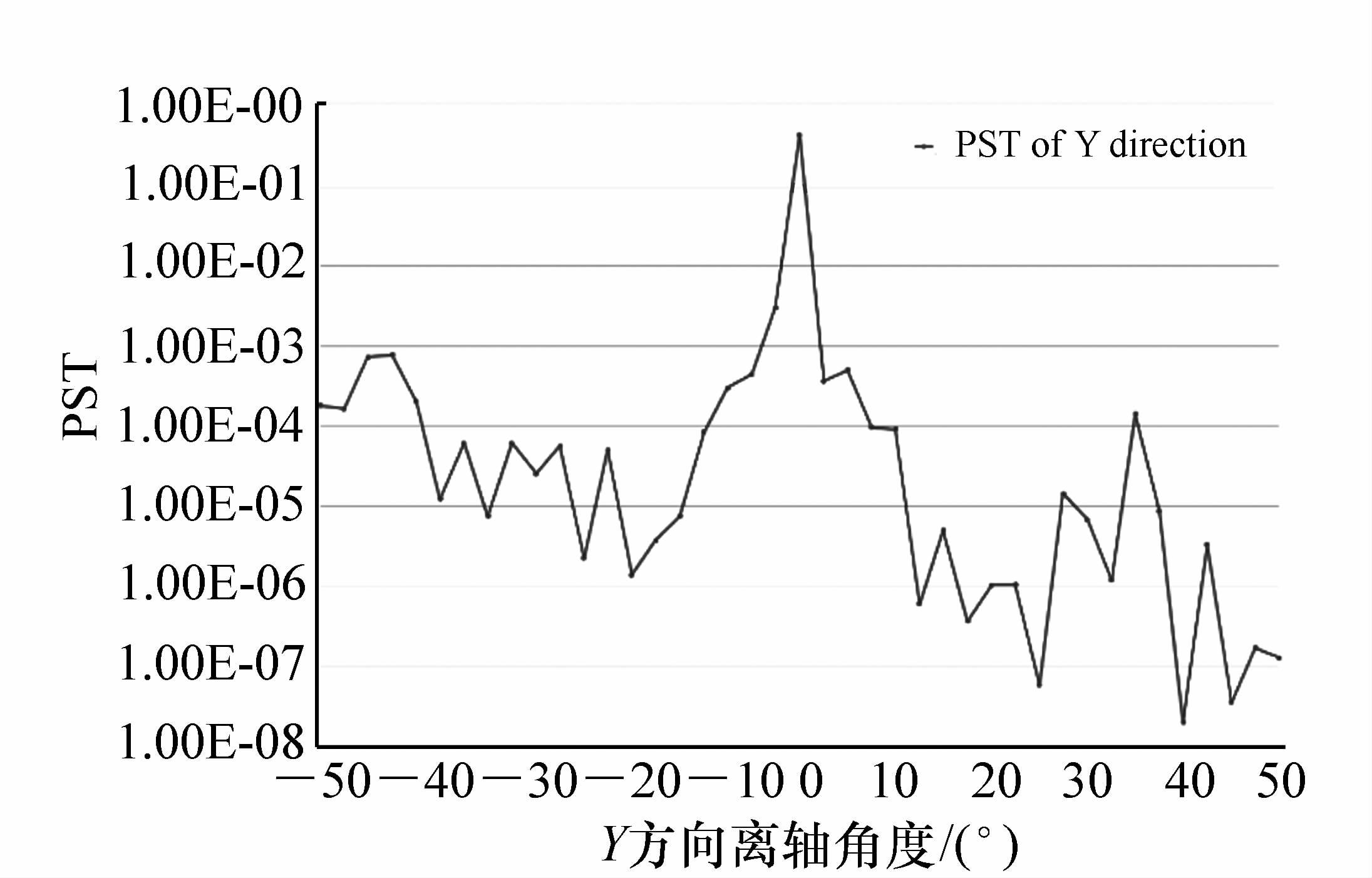
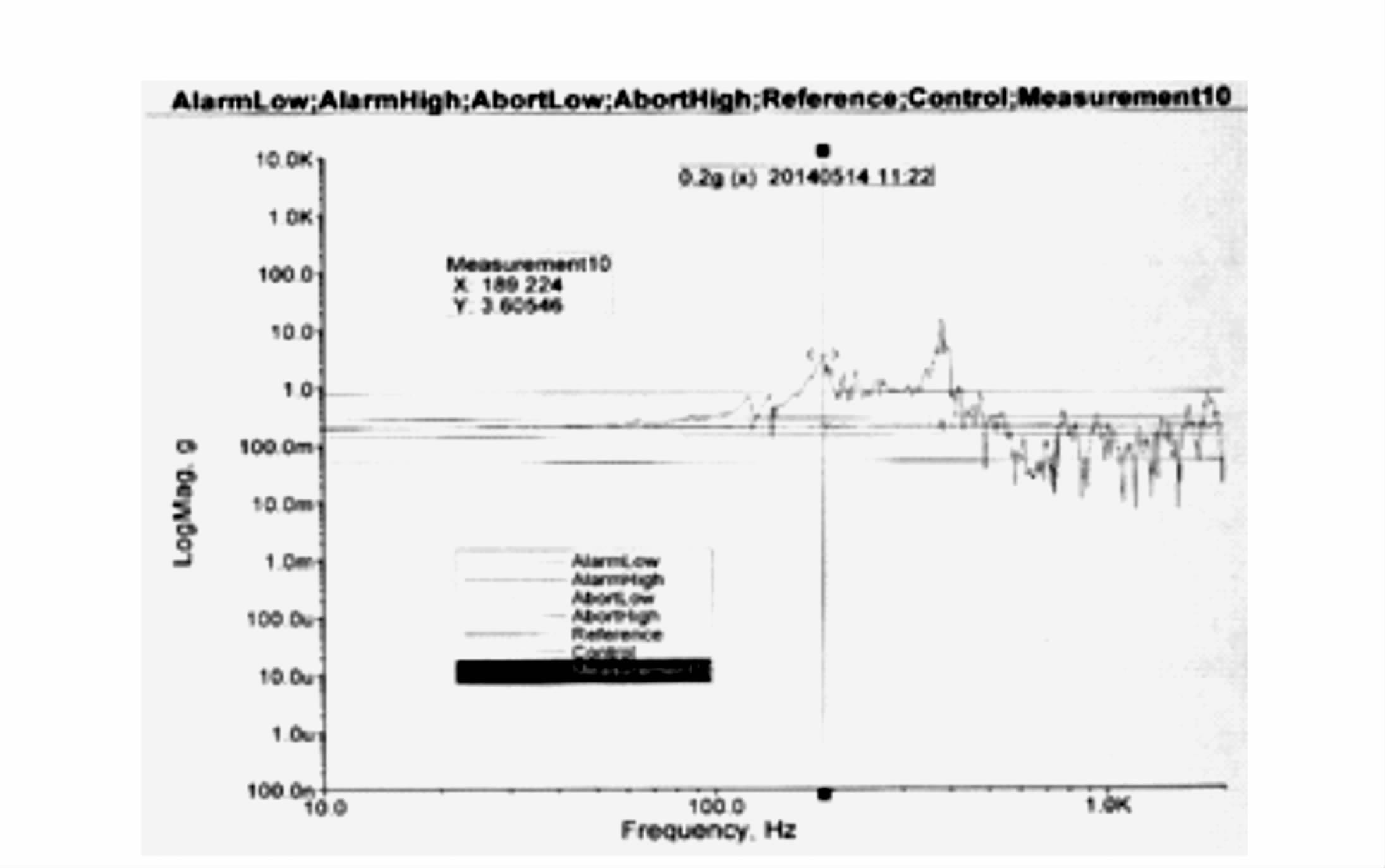
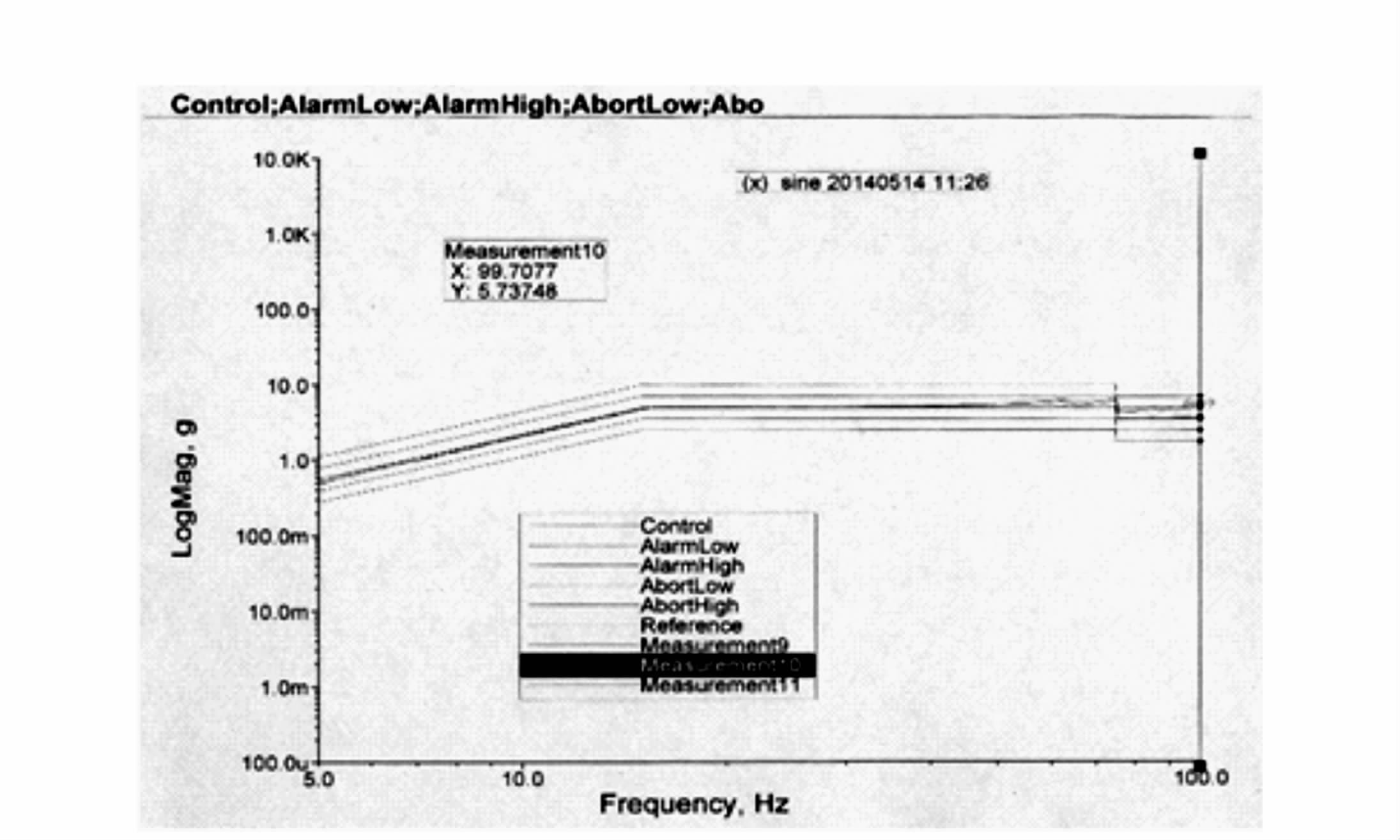
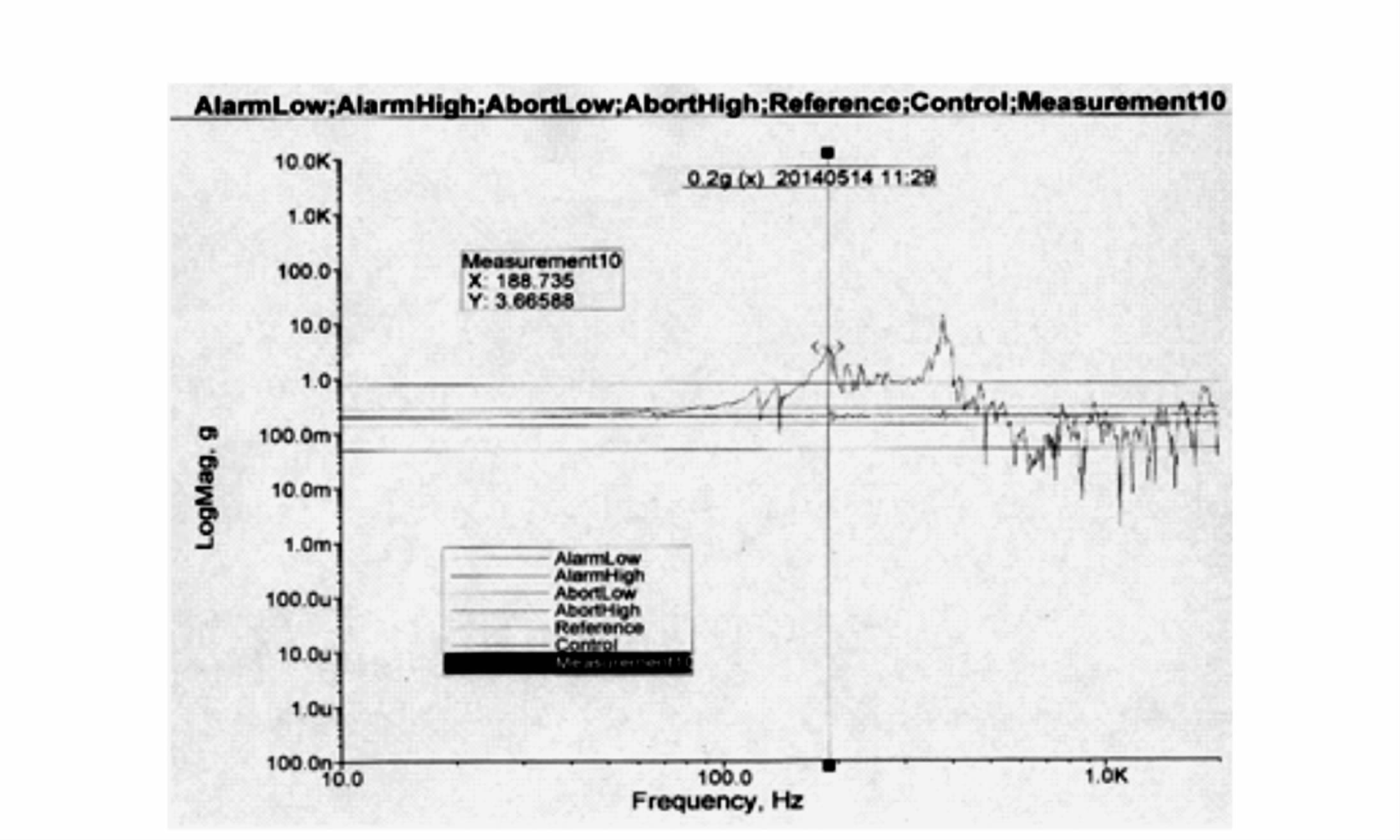
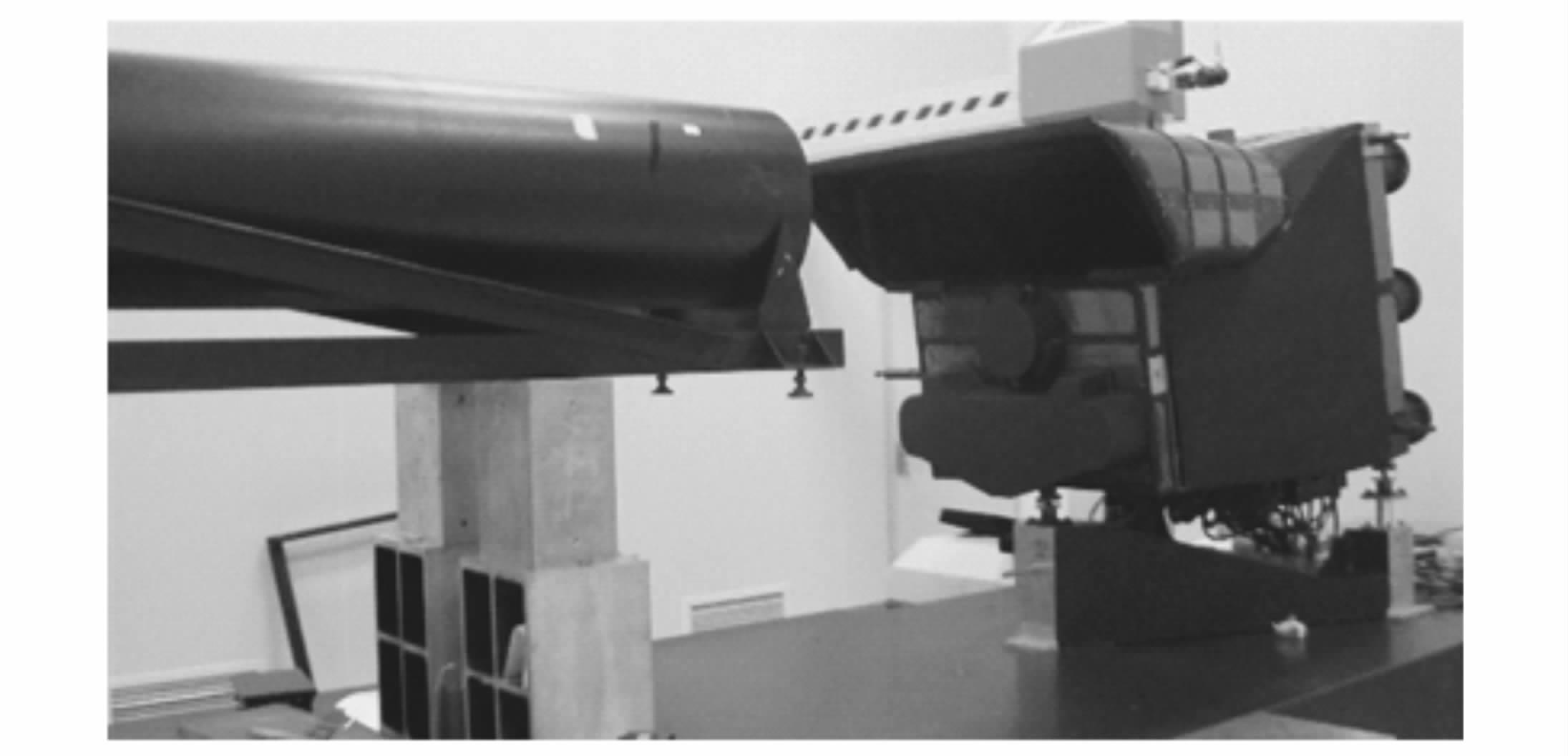
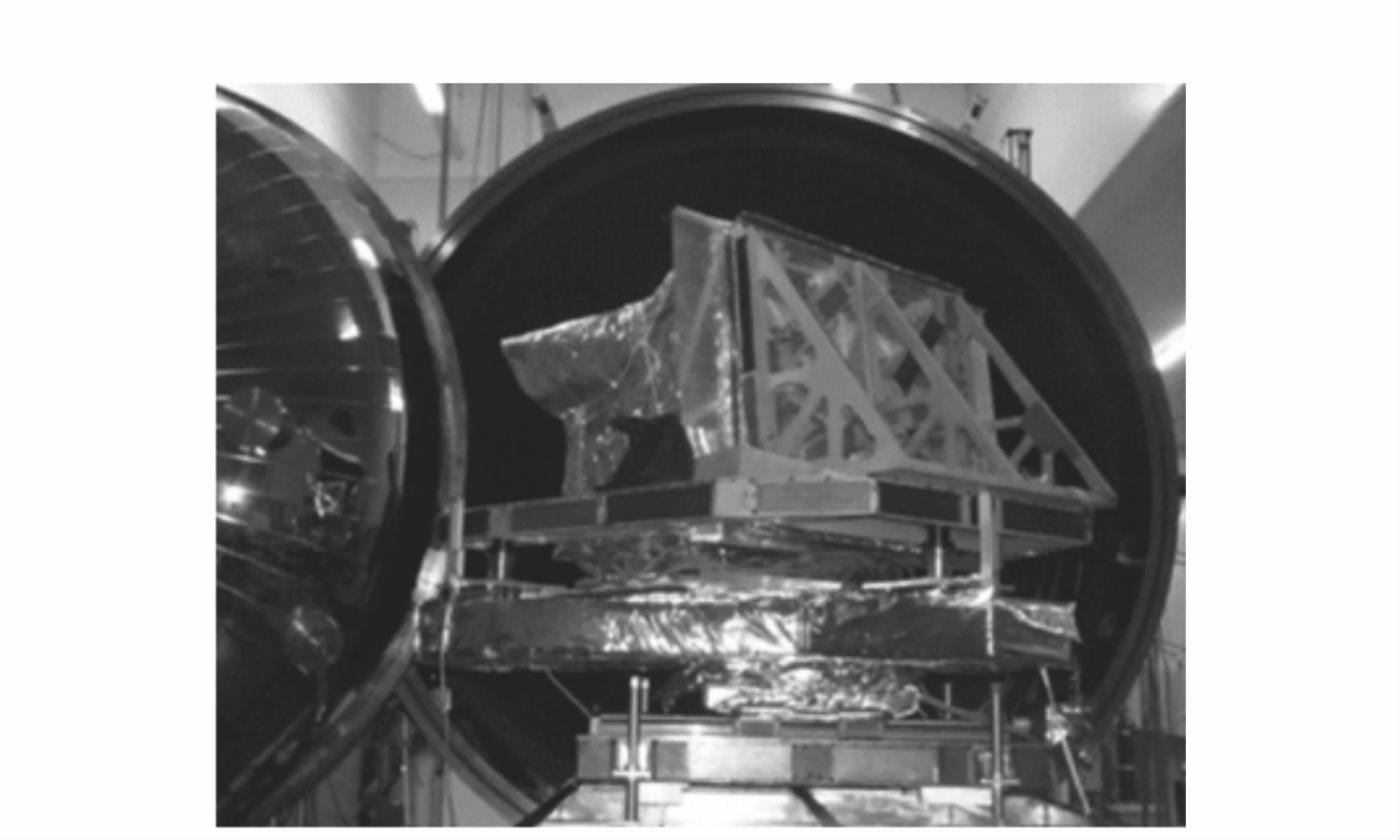
The baffle is an important component of the space optical remote sensor, which is the main way to weaken the stray light from the out-of-field radiation source, and the imaging quality of the space optical remote sensor is dependent on the baffle's performance. In this paper, a large size baffle layout will be designed to meet the off-axis Wetherell TMA optical system. The baffle is made of carbon fiber reinforced polymer(CFRP). The FEM analysis, stray light analysis, mechanical vibration test and optical system MTF test are used to verify the usage requirement in aerospace. Results show that the MTF of the optical remote sensor can reach up to 0.2 in each field of view. It is indicated that the baffle has stable structure and good reliability and can meet the requirements of space applications.
The baffle is an important component of the space optical remote sensor, which is the main way to weaken the stray light from the out-of-field radiation source, and the imaging quality of the space optical remote sensor is dependent on the baffle's performance. In this paper, a large size baffle layout will be designed to meet the off-axis Wetherell TMA optical system. The baffle is made of carbon fiber reinforced polymer(CFRP). The FEM analysis, stray light analysis, mechanical vibration test and optical system MTF test are used to verify the usage requirement in aerospace. Results show that the MTF of the optical remote sensor can reach up to 0.2 in each field of view. It is indicated that the baffle has stable structure and good reliability and can meet the requirements of space applications.





2016, 9(4): 483-490.
doi: 10.3788/CO.20160904.0483
Abstract:
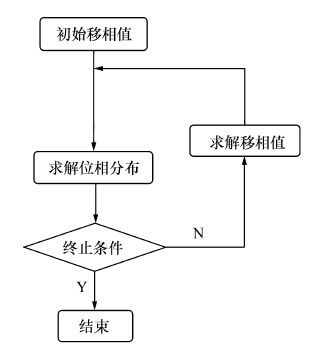
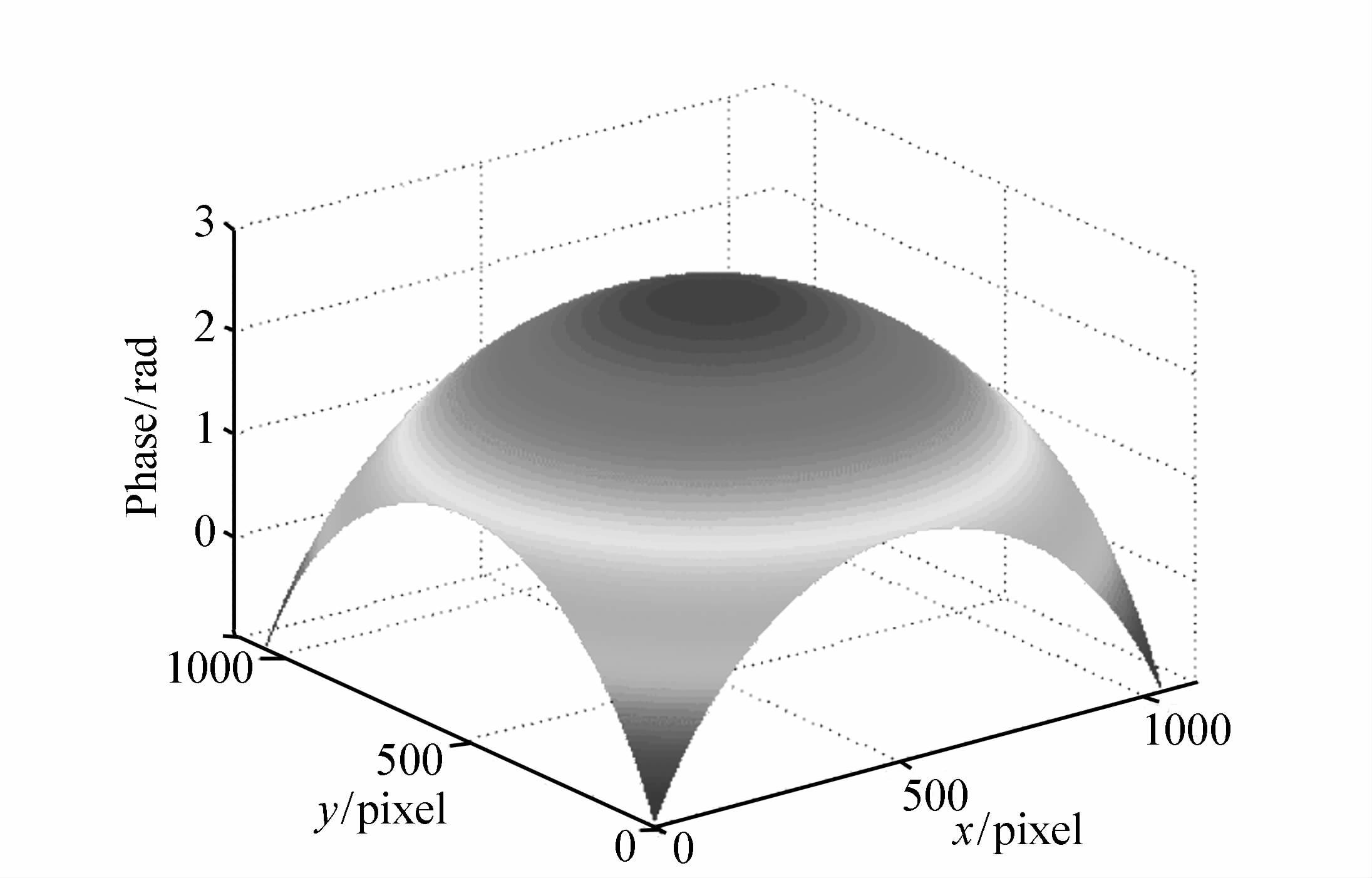
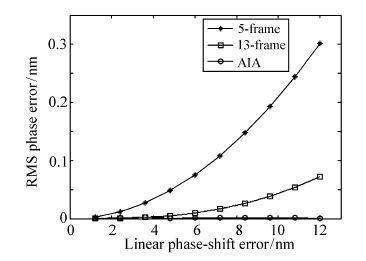
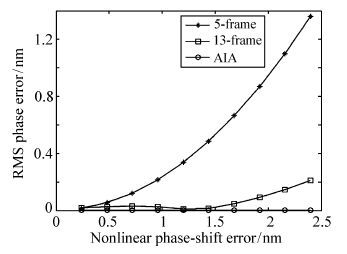
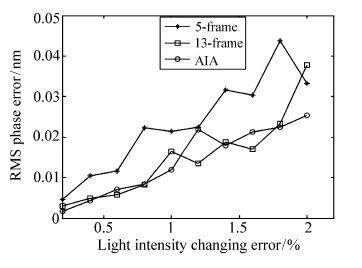
Two-point interference is an important method in testing of phase defects in optical elements with large diameter. In order to analyze the effects of errors on phase extraction algorithms in two-point interference system, the system structure and theoretical model are given firstly. Based on it, the Hariharan 5-frame algorithm, 13-frame algorithm and the advanced iterative algorithm are studied and simulated considering the linear phase shift error, nonlinear phase shift error, intensity error and random vibration error. The result shows that the accuracy of 13-frame algorithm is generally higher than that of 5-frame algorithm and the effect of advanced iterative algorithm is better than the other two. When the errors are given according to the analysis, the RMS error of the advanced iterative algorithm is less than those of 5-frame algorithm and 13-frame algorithm, and the PV of advanced iterative algorithm is less than 0.5 nm steadily. This means that the error of advanced iterative algorithm is affected less by errors while vibration plays the major role in the errors discussed.
Two-point interference is an important method in testing of phase defects in optical elements with large diameter. In order to analyze the effects of errors on phase extraction algorithms in two-point interference system, the system structure and theoretical model are given firstly. Based on it, the Hariharan 5-frame algorithm, 13-frame algorithm and the advanced iterative algorithm are studied and simulated considering the linear phase shift error, nonlinear phase shift error, intensity error and random vibration error. The result shows that the accuracy of 13-frame algorithm is generally higher than that of 5-frame algorithm and the effect of advanced iterative algorithm is better than the other two. When the errors are given according to the analysis, the RMS error of the advanced iterative algorithm is less than those of 5-frame algorithm and 13-frame algorithm, and the PV of advanced iterative algorithm is less than 0.5 nm steadily. This means that the error of advanced iterative algorithm is affected less by errors while vibration plays the major role in the errors discussed.

2016, 9(4): 491-500.
doi: 10.3788/CO.20160904.0491
Abstract:
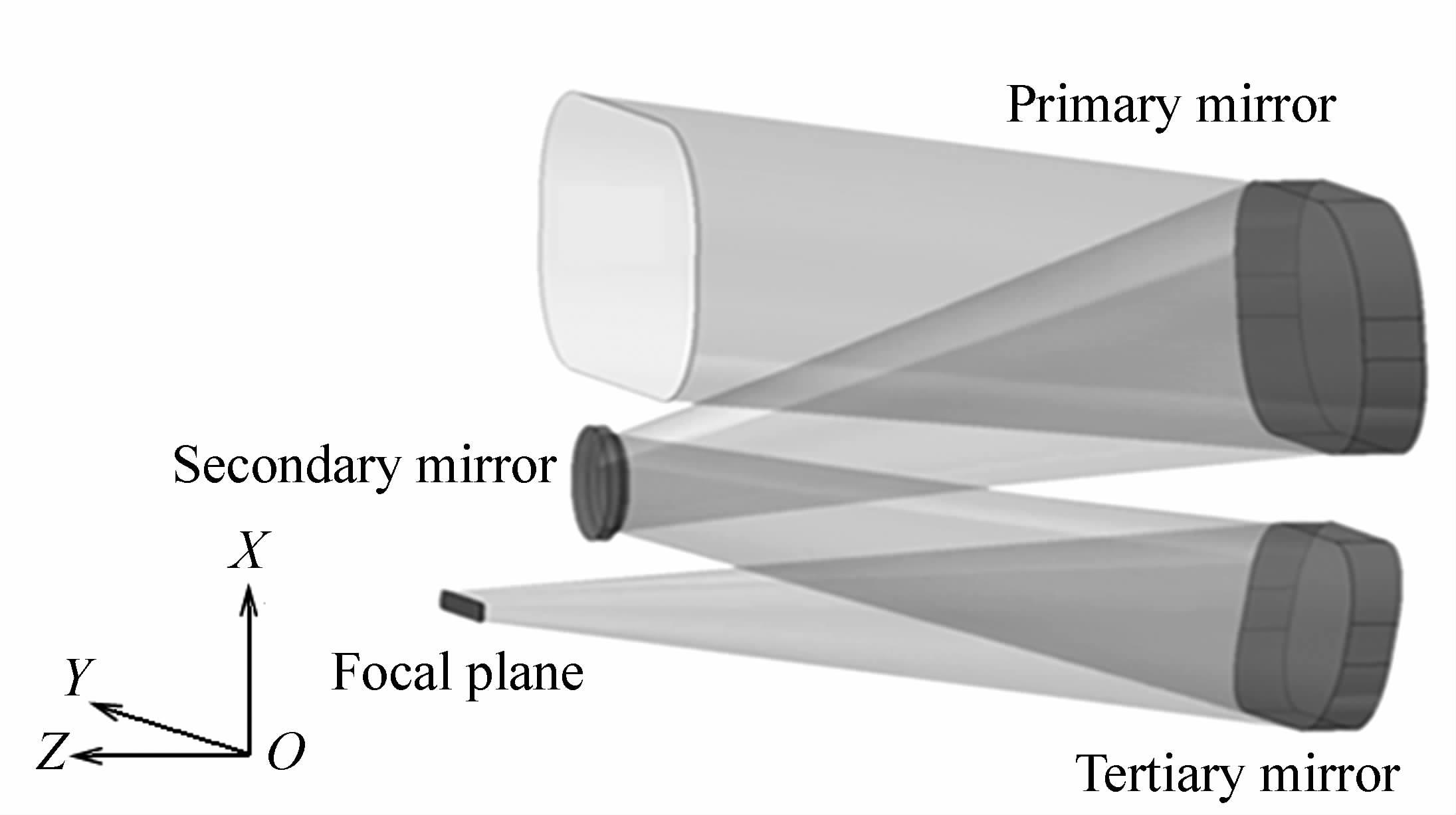
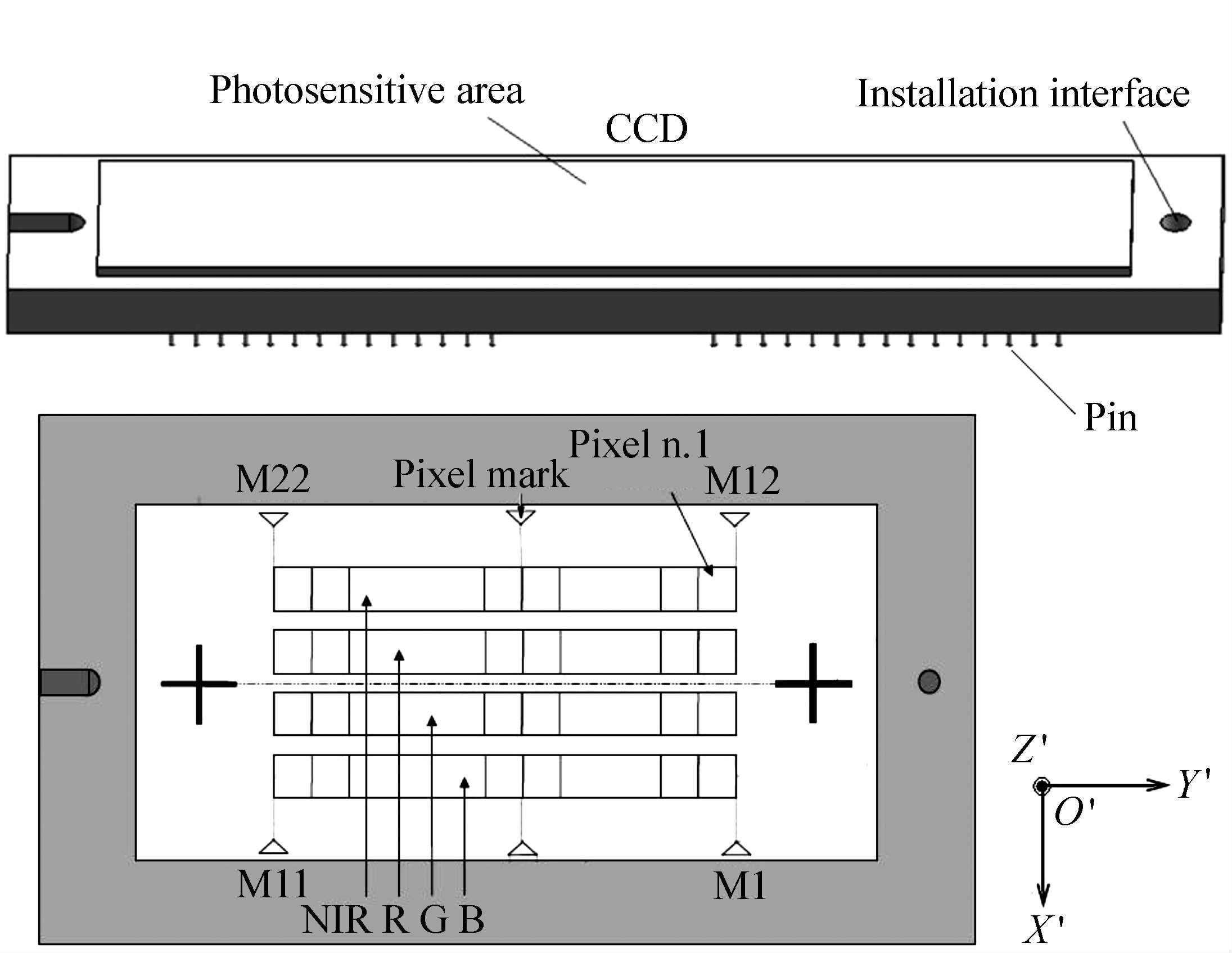
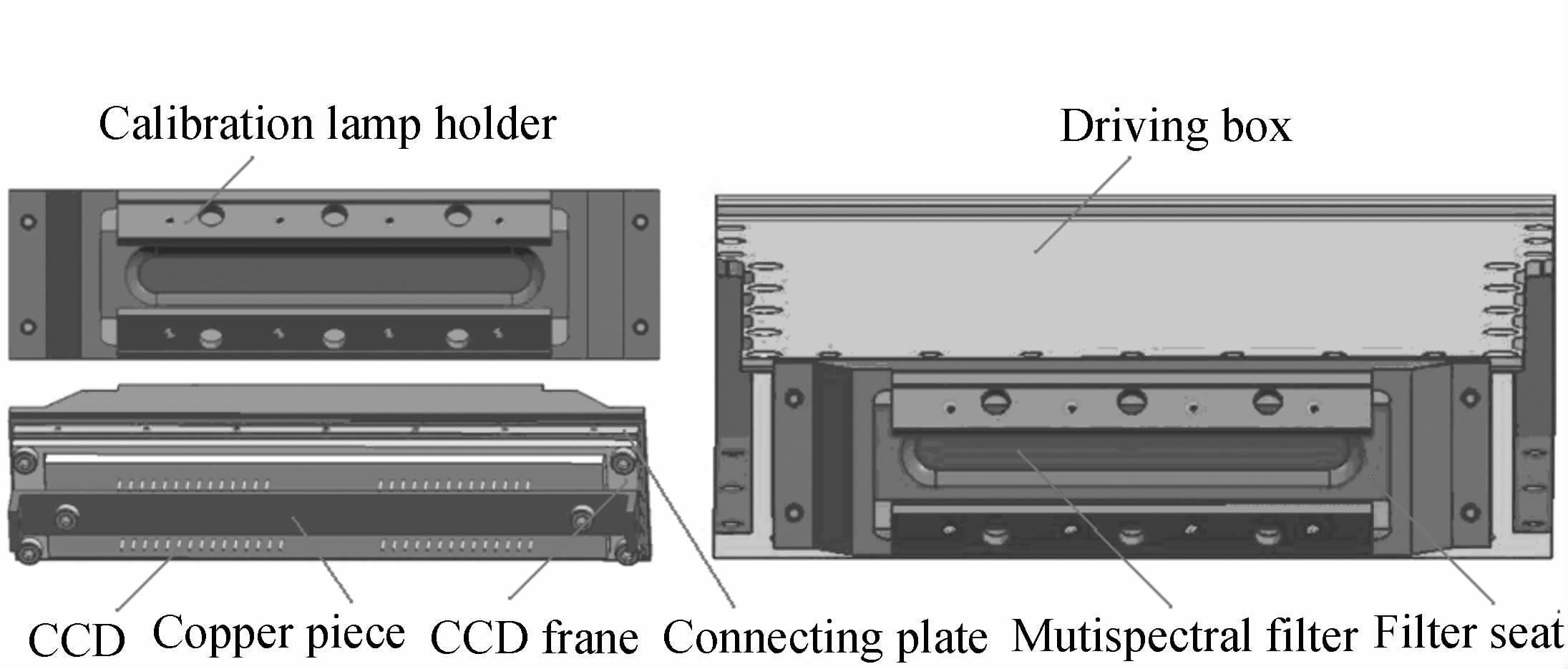
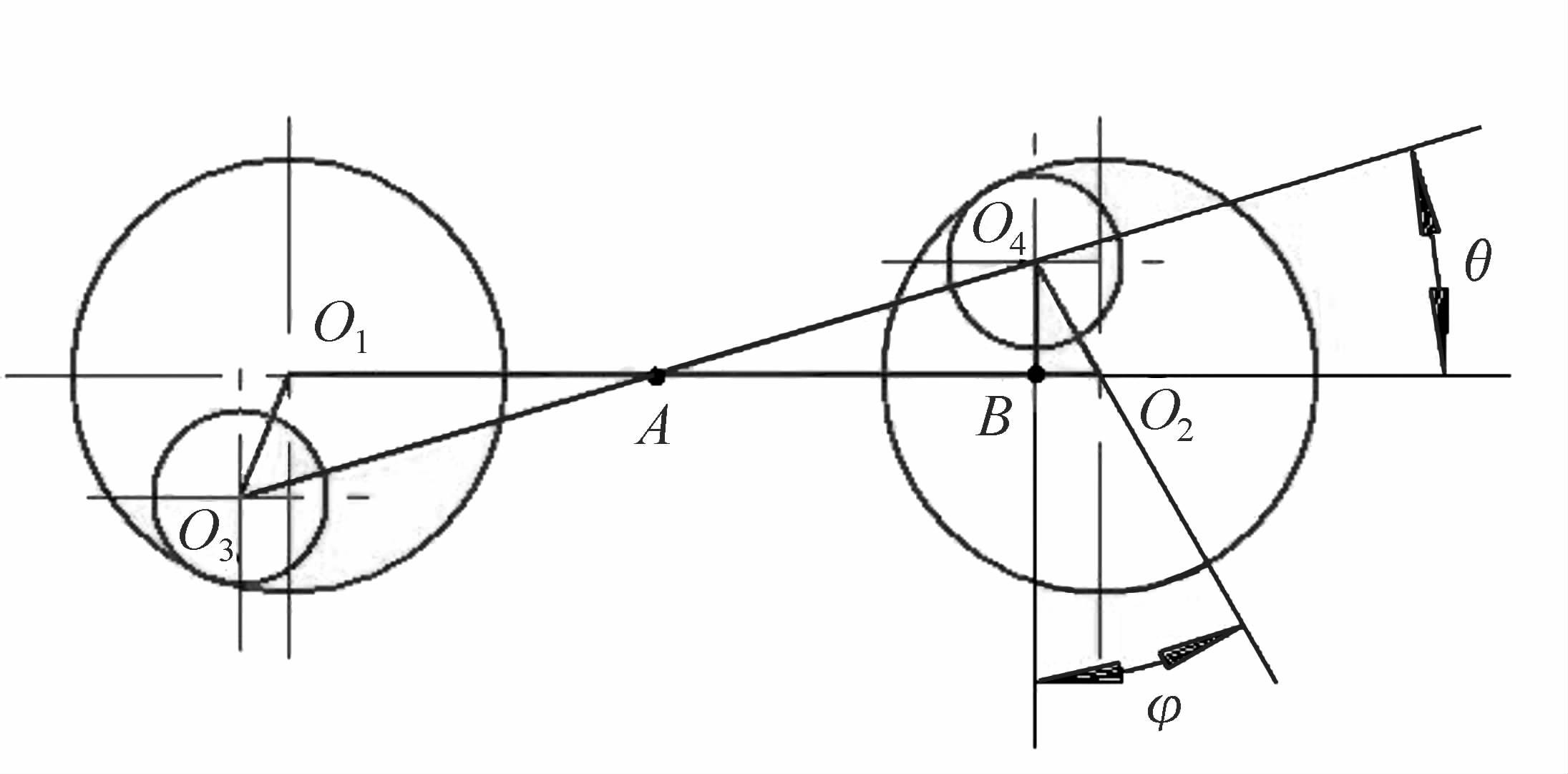
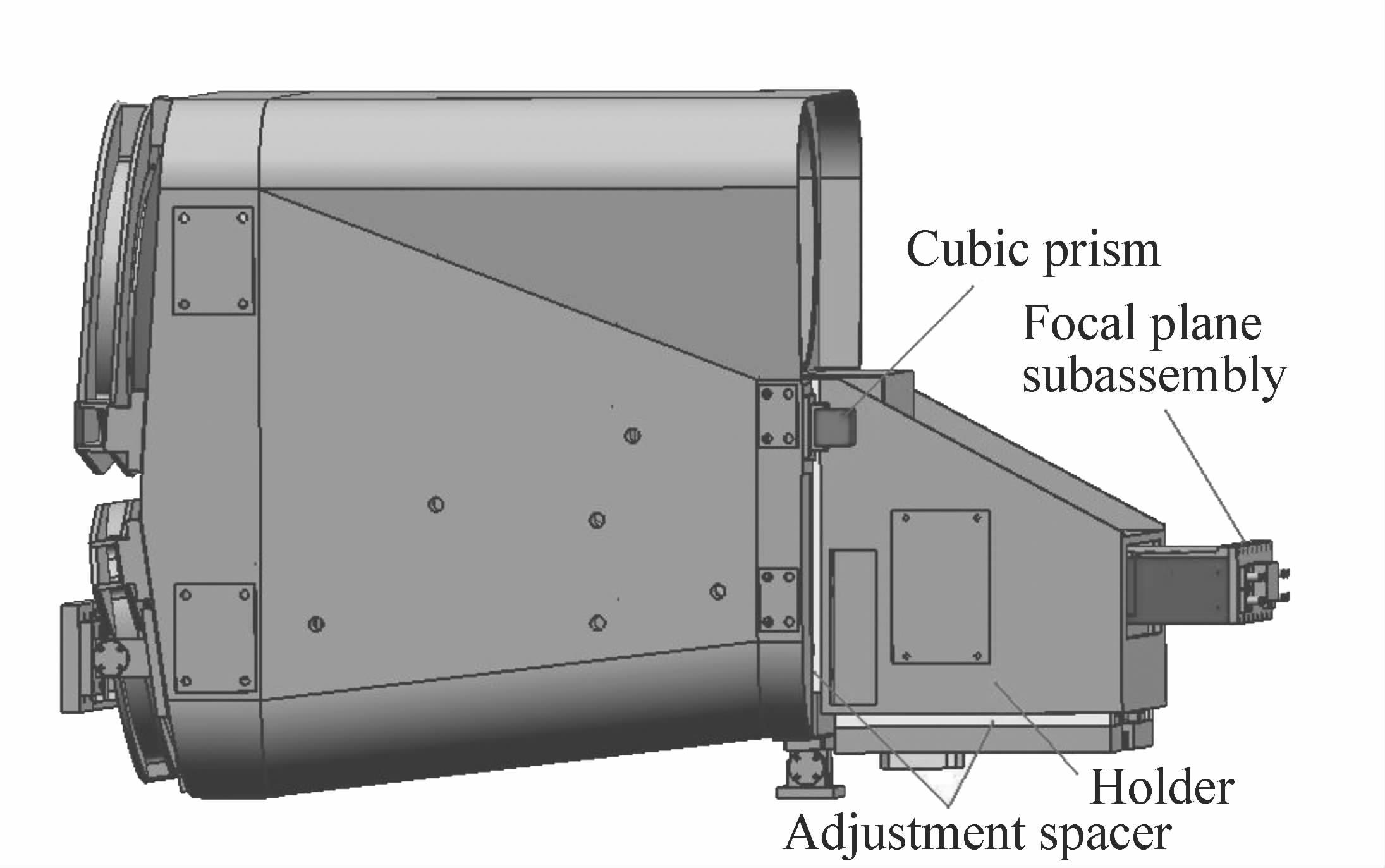
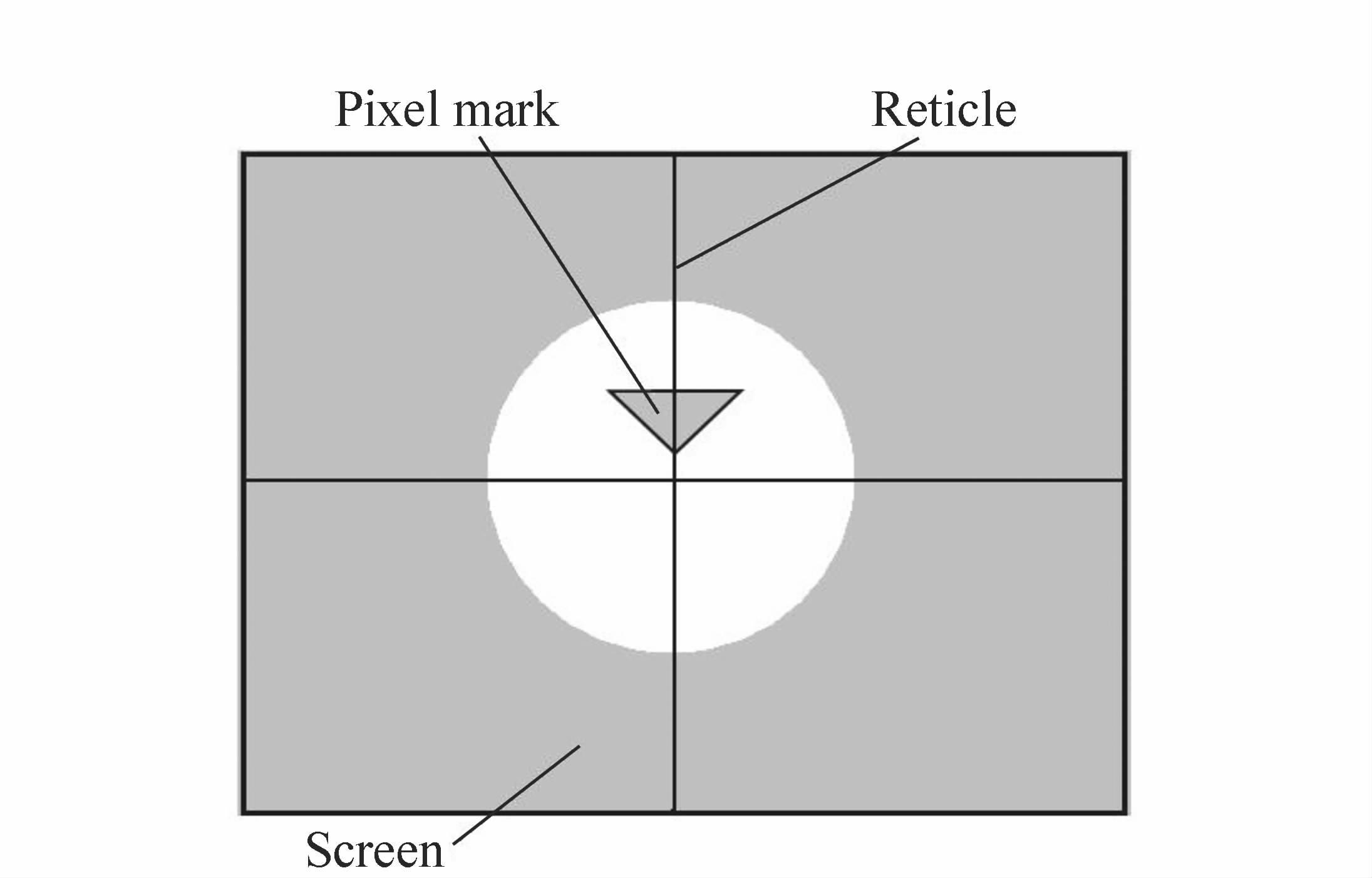
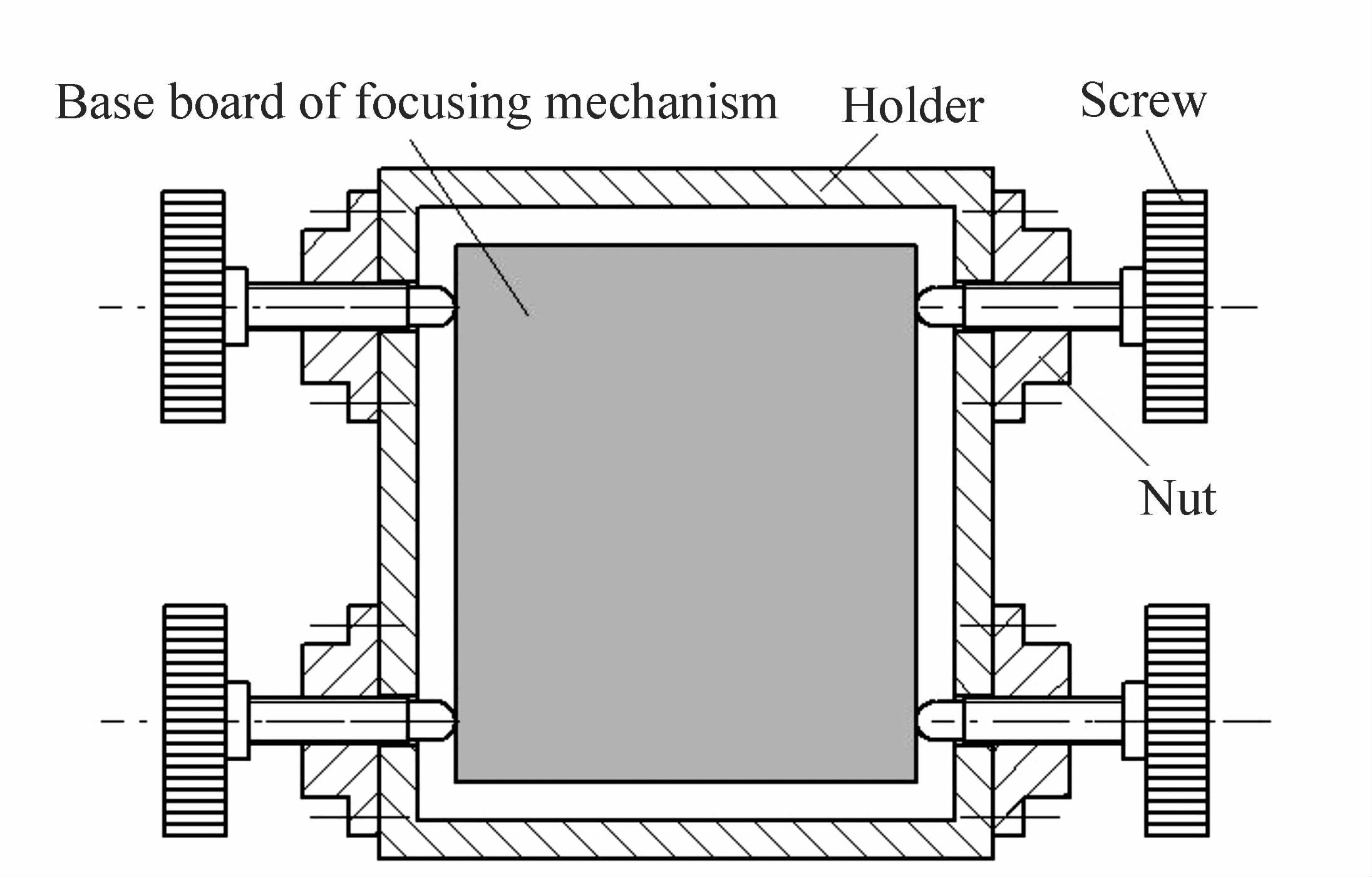
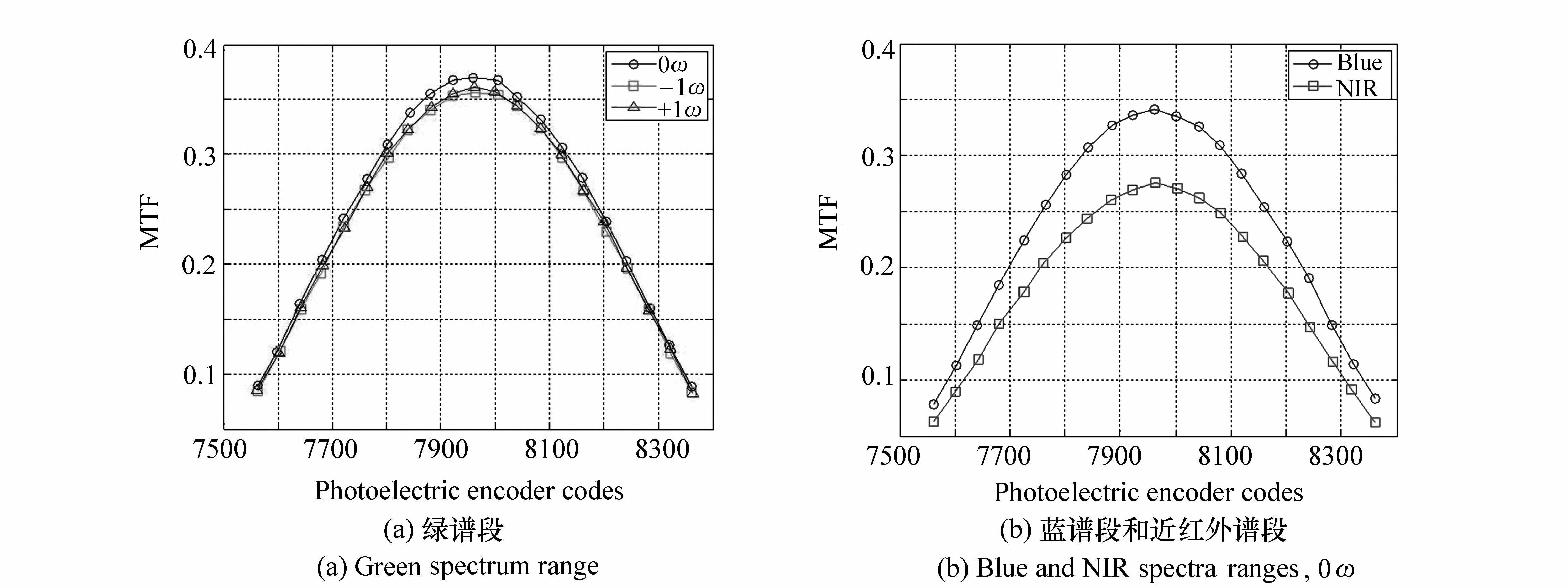
To meet the requirements of high alignment accuracy for a multispectral camera, a focal plane subassembly is designed. Meanwhile, the instruments, fixtures and methods for alignment and measurement are described. First of all, the focal plane subassembly is mounted to the optics so that deflections and shifts of the CCD photosensitive area related to the image plane could be measured and calculated. According to the results given previously, the removal dimension of adjustment spacers is determined and preliminary modification is applied to the spacers. Thereafter, the focal plane subassembly is remounted. Then, the CCD is fine adjusted to its correct orientation and location, and locating pins are embedded into the spacers to hold this adjustment. Finally, based on the fitted optimum focal plane position, spacers are carefully ground and restored. Thus, the alignment is completed. Test results show that, three-dimensional deflections are Δα=-6.7", Δβ=1.9' and Δγ=13.2" respectively; three-dimensional shifts are Δx=-0.004 mm, Δy=0.006 mm and Δz=-0.070 mm respectively. The Modulation Transfer Functions(MTF) corresponding to four spectra and whole field of view are more than 0.25, which can meet the design and alignment specifications. The measurement and calculation error analysis shows that the equipments and methods can meet the precision requirements and provide technique references for homologous cameras.
To meet the requirements of high alignment accuracy for a multispectral camera, a focal plane subassembly is designed. Meanwhile, the instruments, fixtures and methods for alignment and measurement are described. First of all, the focal plane subassembly is mounted to the optics so that deflections and shifts of the CCD photosensitive area related to the image plane could be measured and calculated. According to the results given previously, the removal dimension of adjustment spacers is determined and preliminary modification is applied to the spacers. Thereafter, the focal plane subassembly is remounted. Then, the CCD is fine adjusted to its correct orientation and location, and locating pins are embedded into the spacers to hold this adjustment. Finally, based on the fitted optimum focal plane position, spacers are carefully ground and restored. Thus, the alignment is completed. Test results show that, three-dimensional deflections are Δα=-6.7", Δβ=1.9' and Δγ=13.2" respectively; three-dimensional shifts are Δx=-0.004 mm, Δy=0.006 mm and Δz=-0.070 mm respectively. The Modulation Transfer Functions(MTF) corresponding to four spectra and whole field of view are more than 0.25, which can meet the design and alignment specifications. The measurement and calculation error analysis shows that the equipments and methods can meet the precision requirements and provide technique references for homologous cameras.



2016, 9(4): 501-510.
doi: 10.3788/CO.20160904.0501
Abstract:
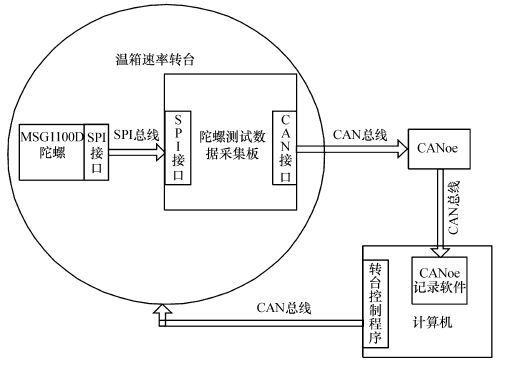
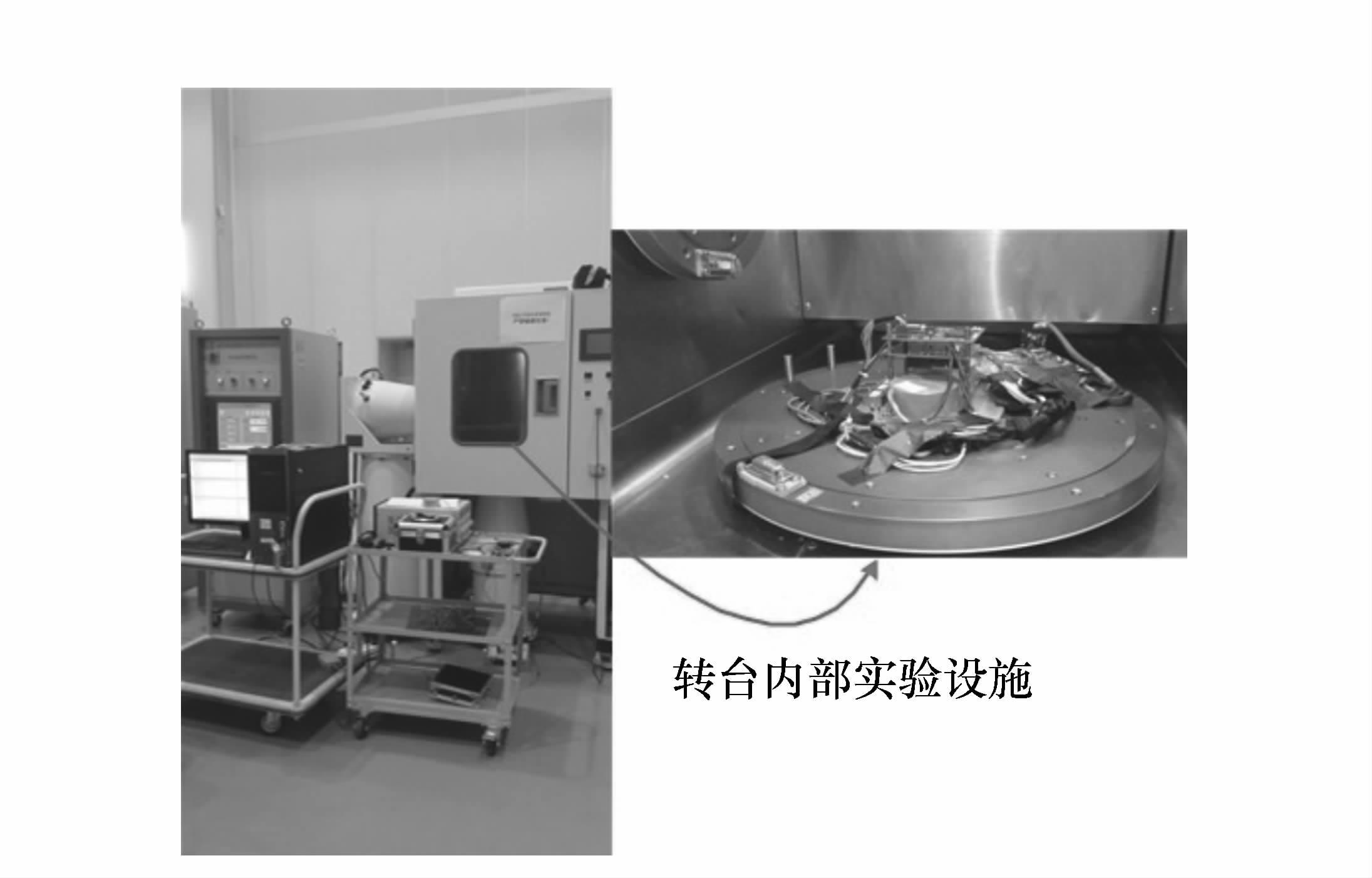
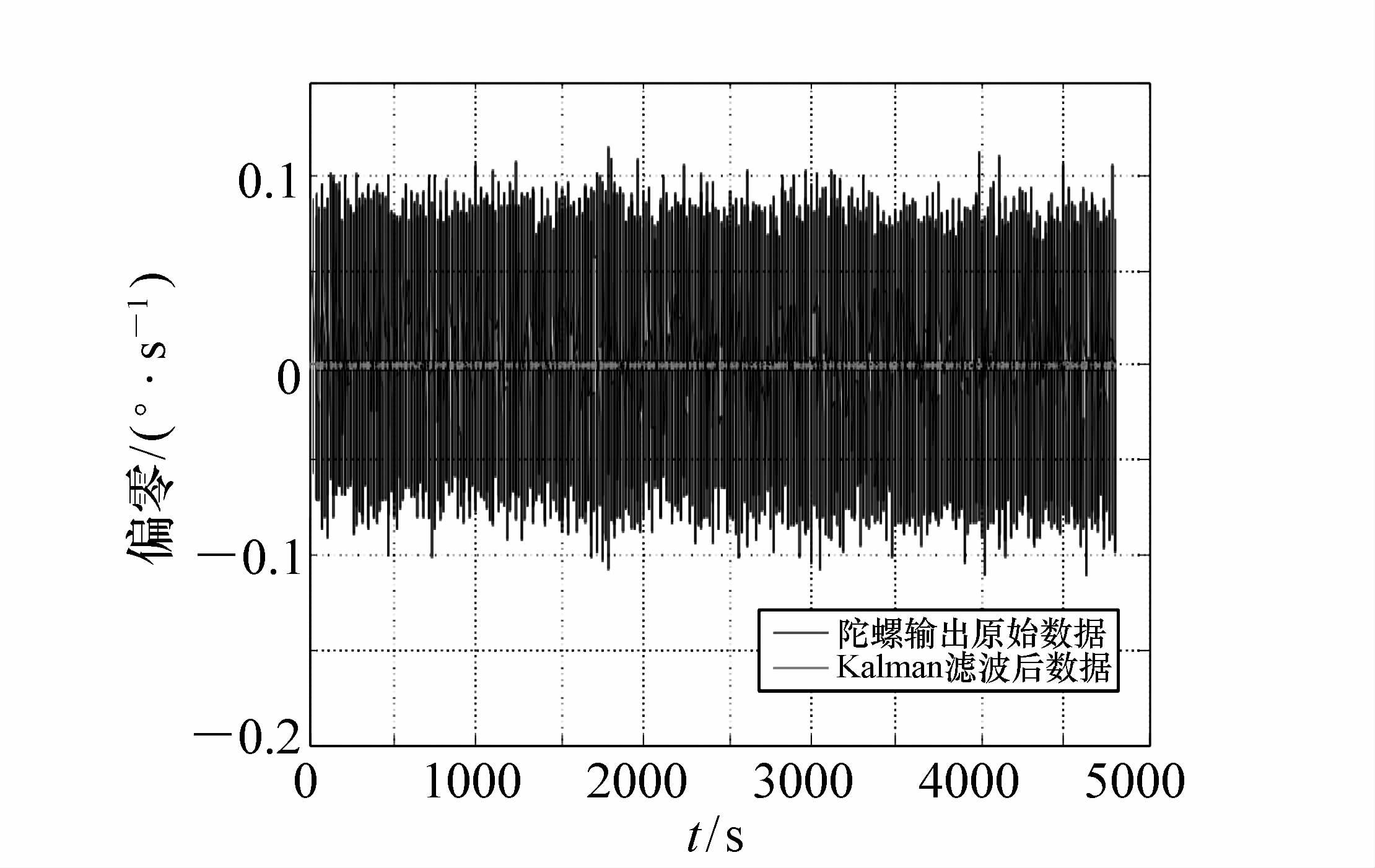
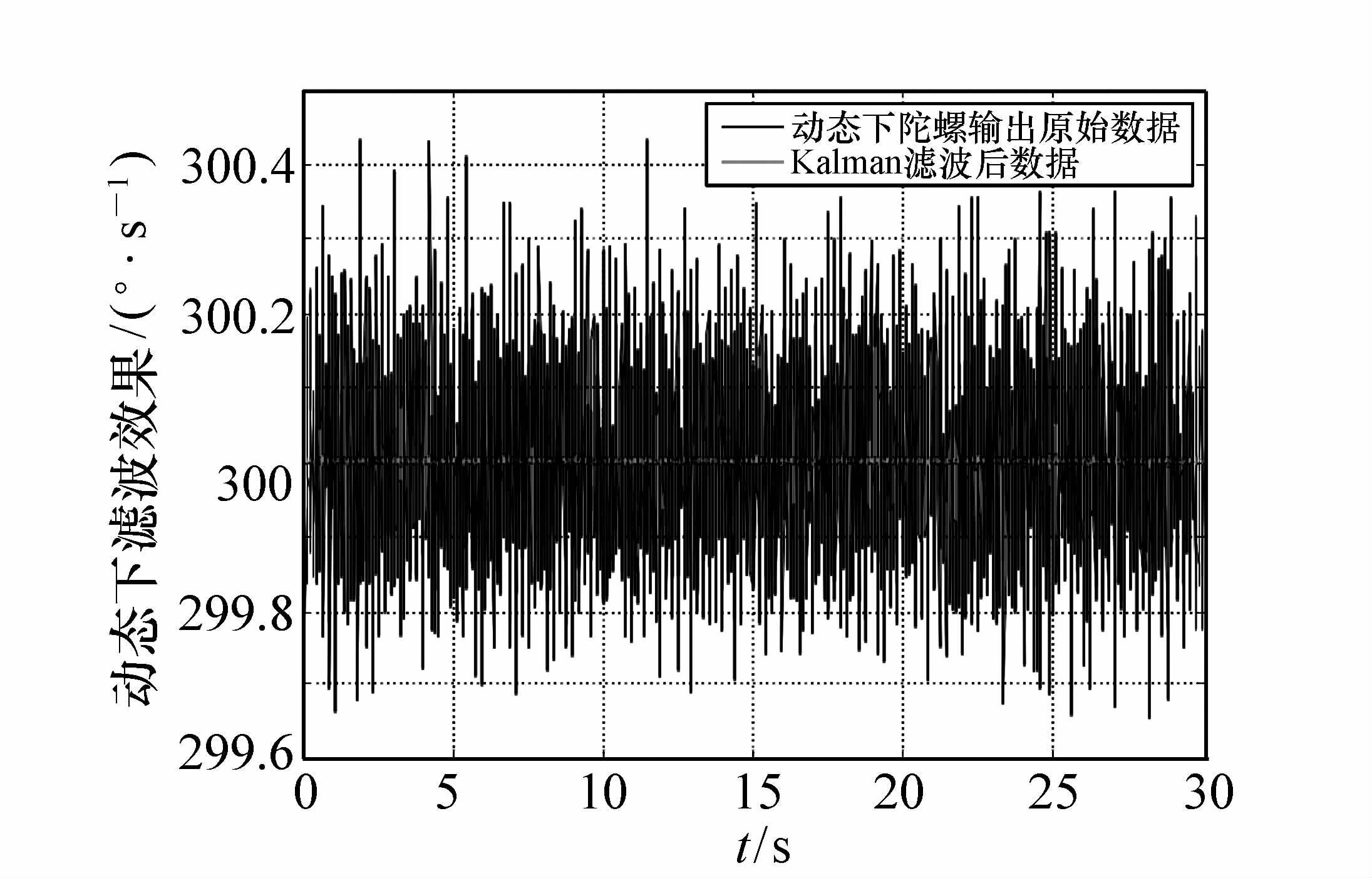
In order to improve the accuracy of MEMS gyro angular velocity, Allan analysis and Kalman filter algorithm are used to analyze and compensate the random error of MEMS gyroscope. First, Allan variance is used to analyze the gyro output data, and least squares algorithm is used to fit Allan variance. A quantitative evaluation of the random noise is obtained. Then, AR model is applied to set up a mathematical model of gyro output data, and AIC criterion is used to determine the order of the AR model, establishing a discrete time expression of gyro drift data. After that, the Kalman filter is designed based on gyro random error model established by AR model, and Kalman filtering algorithm is used for filtering processing of gyro output data. The random error of gyro can be compensated. Finally, the compensation effect of Kalman algorithm for the gyro random error is analyzed through Allan variance. Experimental results indicate that after compensation of Kalman filter the angular random walk is reduced by 97.24% from 0.148 7°/$\sqrt{h}$ to 0.004 1°/$\sqrt{h}$, the bias instability is reduced by 97.21% from 1.940 8°/h to 0.0542°/h, and rate random walk is reduced by 87.61% from 2.6985°/h$\frac{3}{2}$ to 0.3343°/h$\frac{3}{2}$. Kalman filter can be well applied to filtering process of MEMS gyroscope, and it can effectively reduce the gyro random error.
In order to improve the accuracy of MEMS gyro angular velocity, Allan analysis and Kalman filter algorithm are used to analyze and compensate the random error of MEMS gyroscope. First, Allan variance is used to analyze the gyro output data, and least squares algorithm is used to fit Allan variance. A quantitative evaluation of the random noise is obtained. Then, AR model is applied to set up a mathematical model of gyro output data, and AIC criterion is used to determine the order of the AR model, establishing a discrete time expression of gyro drift data. After that, the Kalman filter is designed based on gyro random error model established by AR model, and Kalman filtering algorithm is used for filtering processing of gyro output data. The random error of gyro can be compensated. Finally, the compensation effect of Kalman algorithm for the gyro random error is analyzed through Allan variance. Experimental results indicate that after compensation of Kalman filter the angular random walk is reduced by 97.24% from 0.148 7°/$\sqrt{h}$ to 0.004 1°/$\sqrt{h}$, the bias instability is reduced by 97.21% from 1.940 8°/h to 0.0542°/h, and rate random walk is reduced by 87.61% from 2.6985°/h$\frac{3}{2}$ to 0.3343°/h$\frac{3}{2}$. Kalman filter can be well applied to filtering process of MEMS gyroscope, and it can effectively reduce the gyro random error.