


Real-time measurement for boresight vibration of dual line array surveying and mapping cameras
-
摘要:
本文建立了一个航天线阵测绘相机视轴测量模型,以实现对双线阵测绘相机视轴抖动的实时测量。首先,通过在相机焦平面两端设置激光收发装置,经由中央棱镜关联,构建了两台相机之间的夹角参数变化测量模型。接着,基于双矢量定姿原理推导了计算表达式,可以实现相机焦距及绕XYZ三轴变化量的高精度测量。对计算方法的误差进行了分析,并通过仿真进行了验证。此外,还对本文提出方法与工程上常用的简化方法之间的残差进行了仿真,结果表明,简化方法仅在很小的测量范围内与本文提出方法一致性良好,当测量角度范围扩大到2′时,采用本文提出的计算方法才能得到精度为0.1″的测量结果。最后,在热真空环境下进行了试验验证,结果显示采用该计算方法得到的相机内外参标定精度达0.1″,结果表明两台相机夹角参数表现出轨道周期性规律,为后续开展立体测绘任务提供了良好的参考。
Abstract:In order to realize the real-time measurement of the boresight vibration of the dual line array surveying and mapping camera, a measurement model of the optical axis of the aerospace line array surveying and mapping camera is established. First, by setting up laser transceivers at both ends of the focal plane of the camera, through the central prism correlation, an angle parameter change measurement model for the two cameras is constructed. An optical axis measurement method for multi-line array cameras based on the dual-vector attitude determination principle is proposed. The calculation expression is given and the algorithm error is analyzed, which is verified by simulation. In addition, the residuals of the two algorithms are simulated and the results show that the simplified algorithm is only in good agreement with the dual vector algorithm in a small measurement range but when the detection range is expanded to 2 seconds, the algorithm in this article can be used to obtain 0.1 arc-second. Finally, the algorithm was tested and verified in a thermal vacuum environment, which verified that the calibration accuracy of the internal and external parameters of the camera using this algorithm reached 0.1 arc-second. The results showed that the angle parameters of the two cameras exhibited the periodicity of the orbit, which provided good conditions for the subsequent development of stereo surveying and mapping tasks.
-
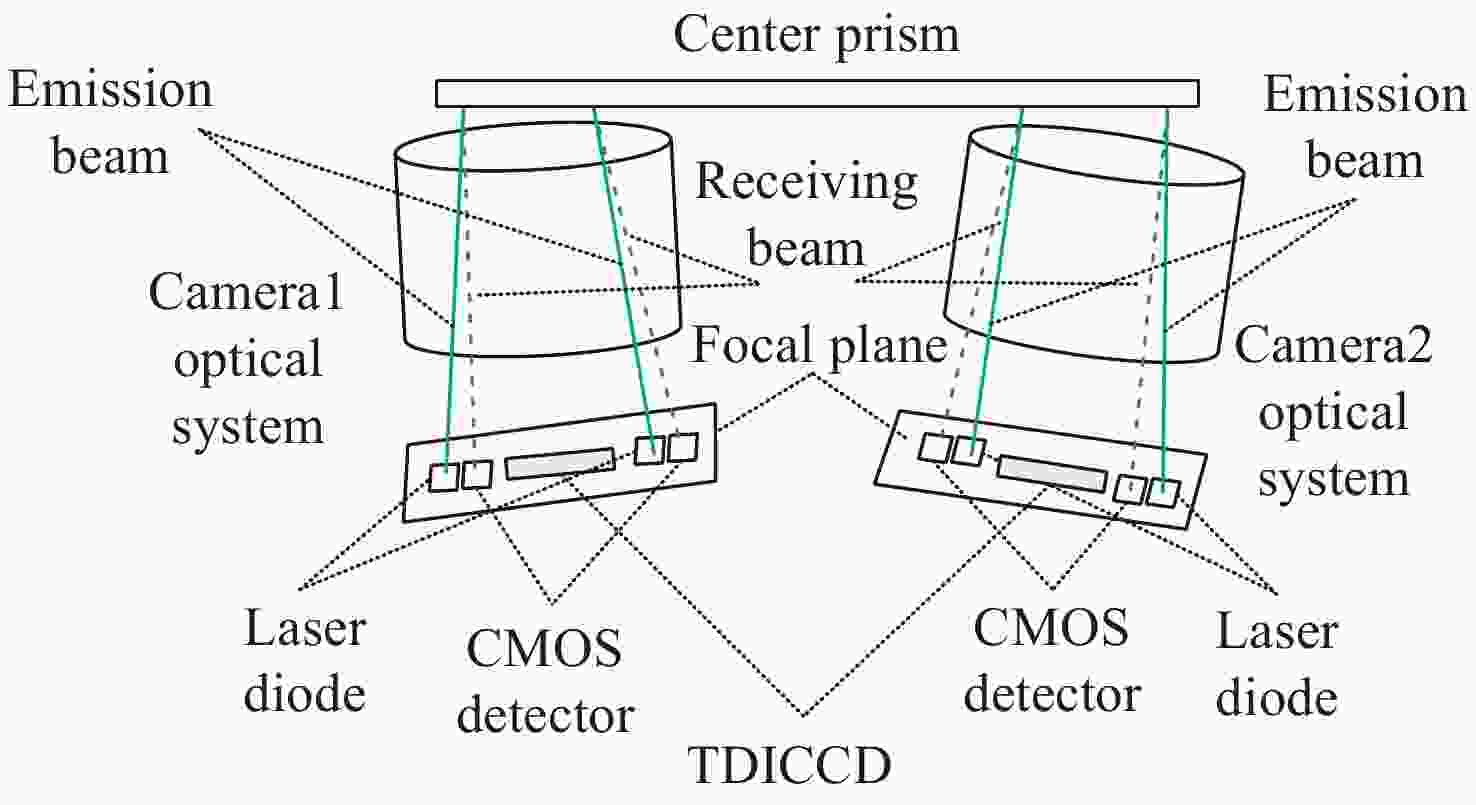
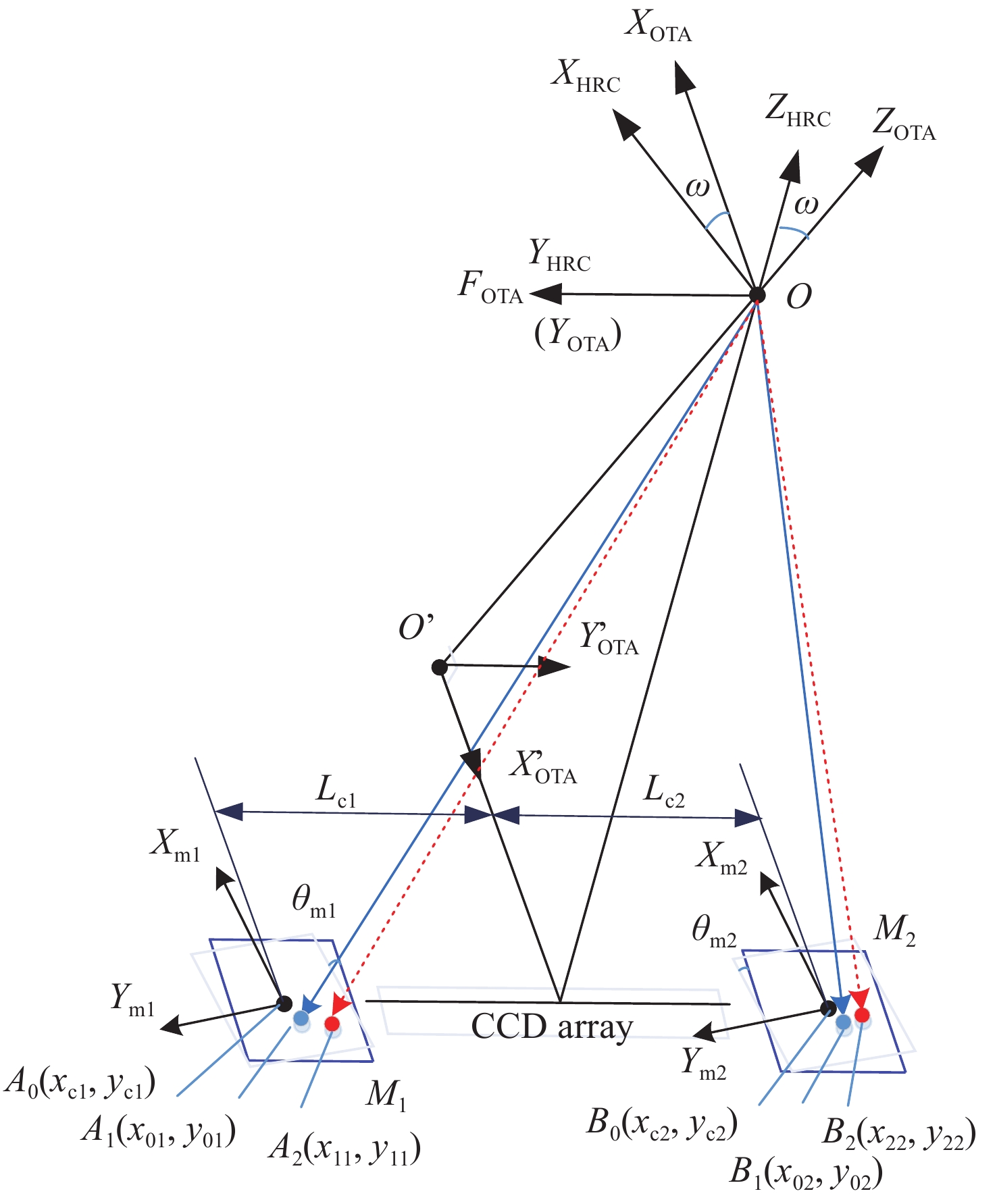
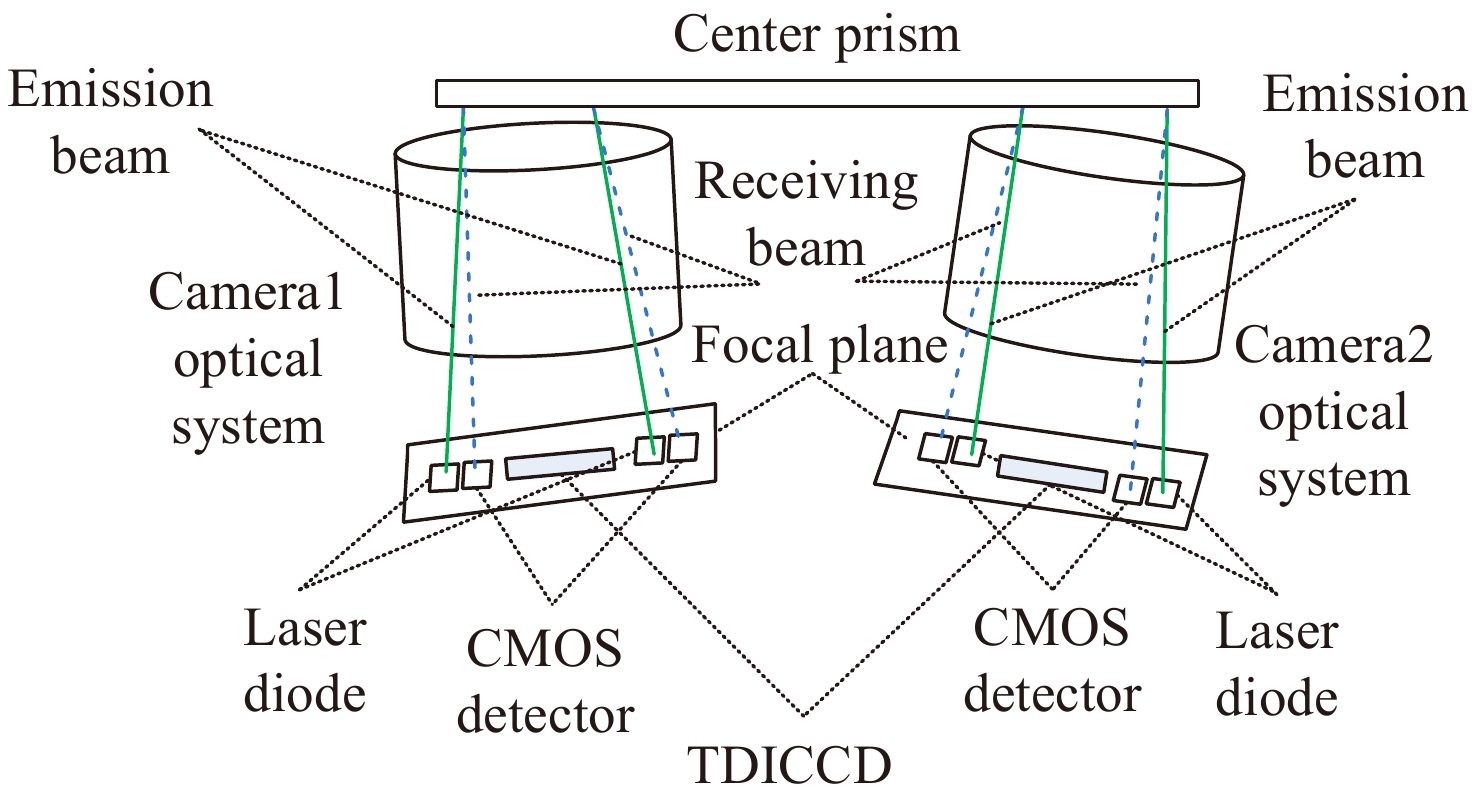
图 1 相机内外参数星上测量简图
Figure 1. Schematic diagram of the on-satellite measurement of the camera’s internal and external parameters
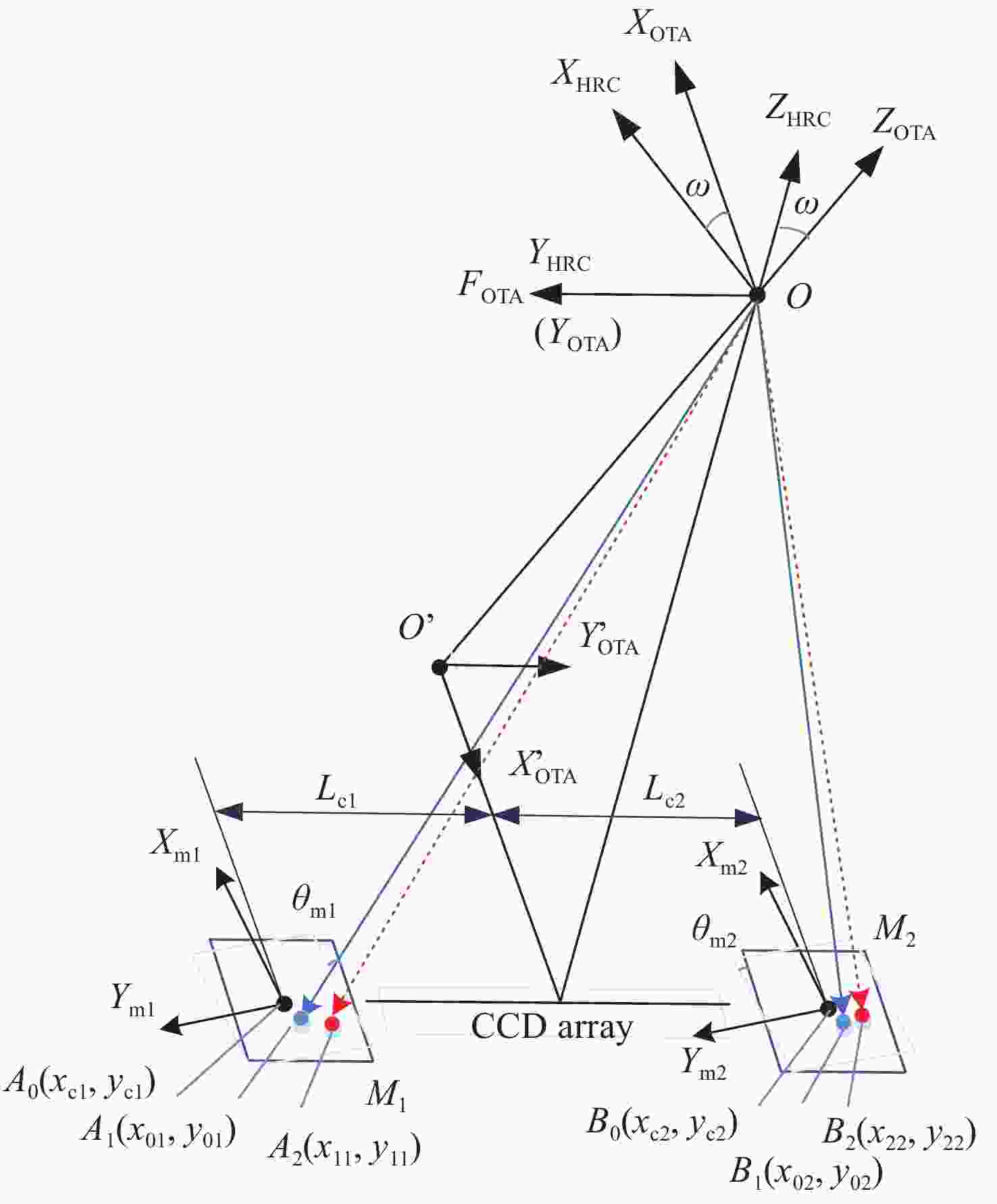
图 2 单台相机内外参数星上测量示意图
Figure 2. Schematic diagram of the on-satellite measurement of internal and external parameters of a single camera
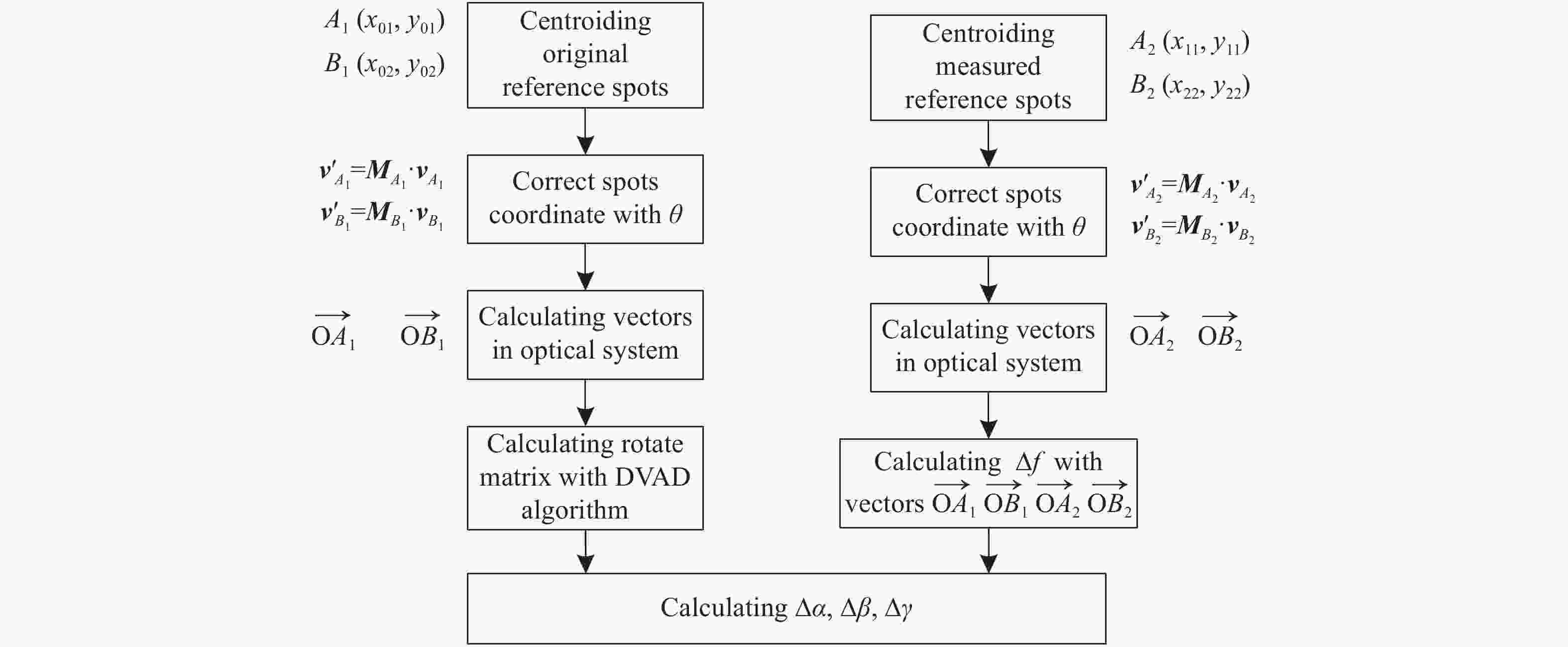
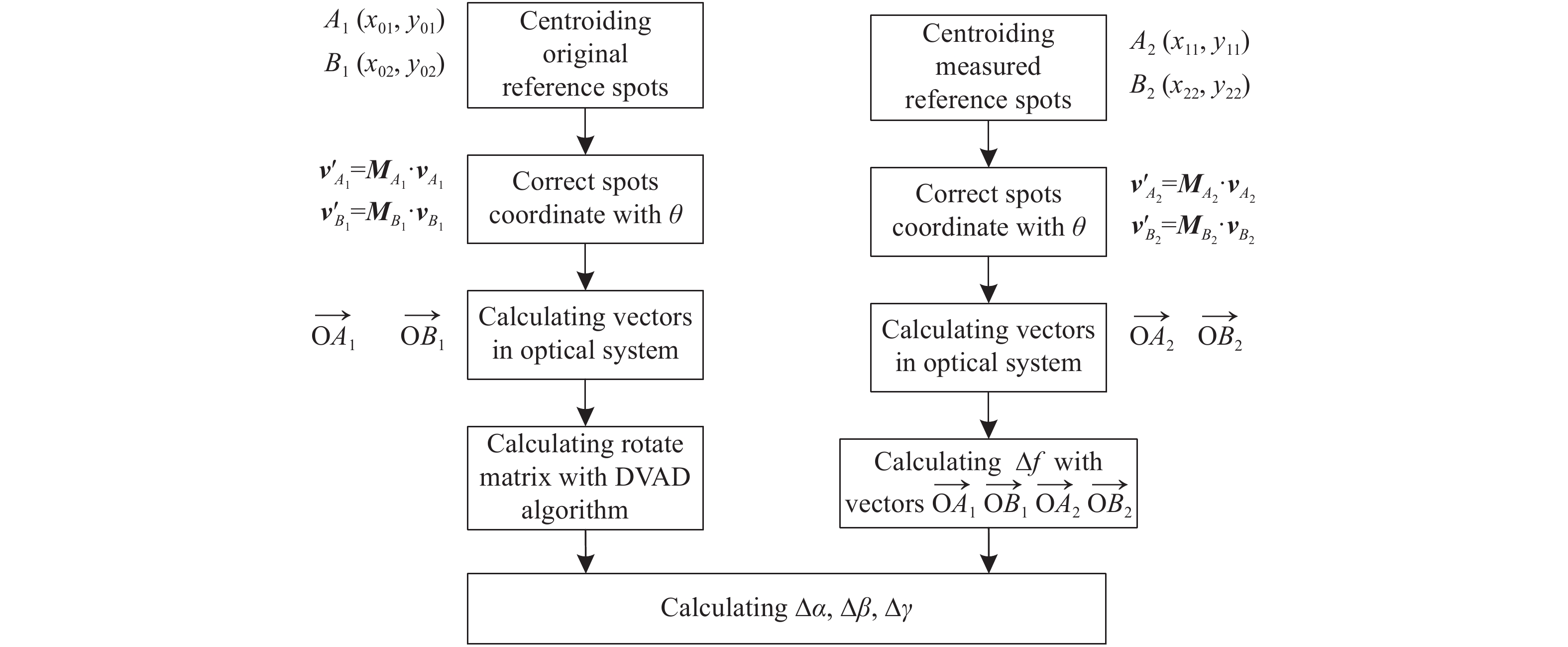
图 3 基于双矢量定姿原理的处理流程
Figure 3. Processing flow based on the principle of Dual Vector Attitude Determination(DVAD)
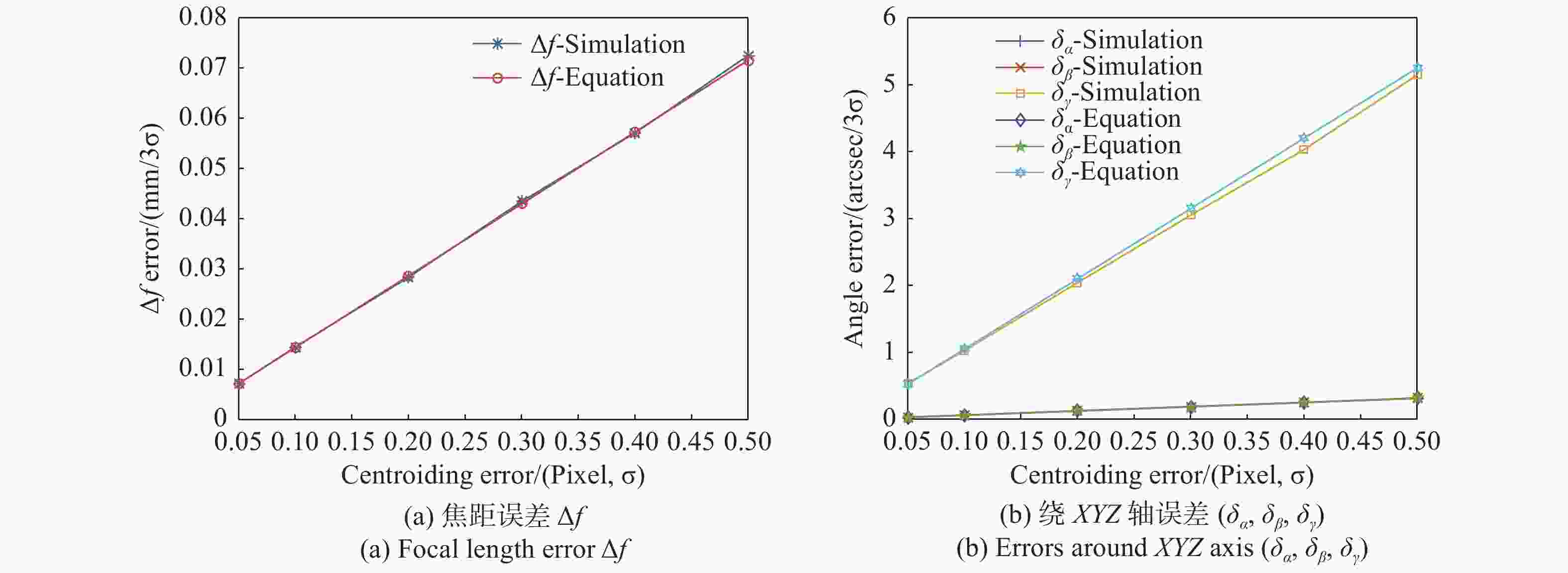
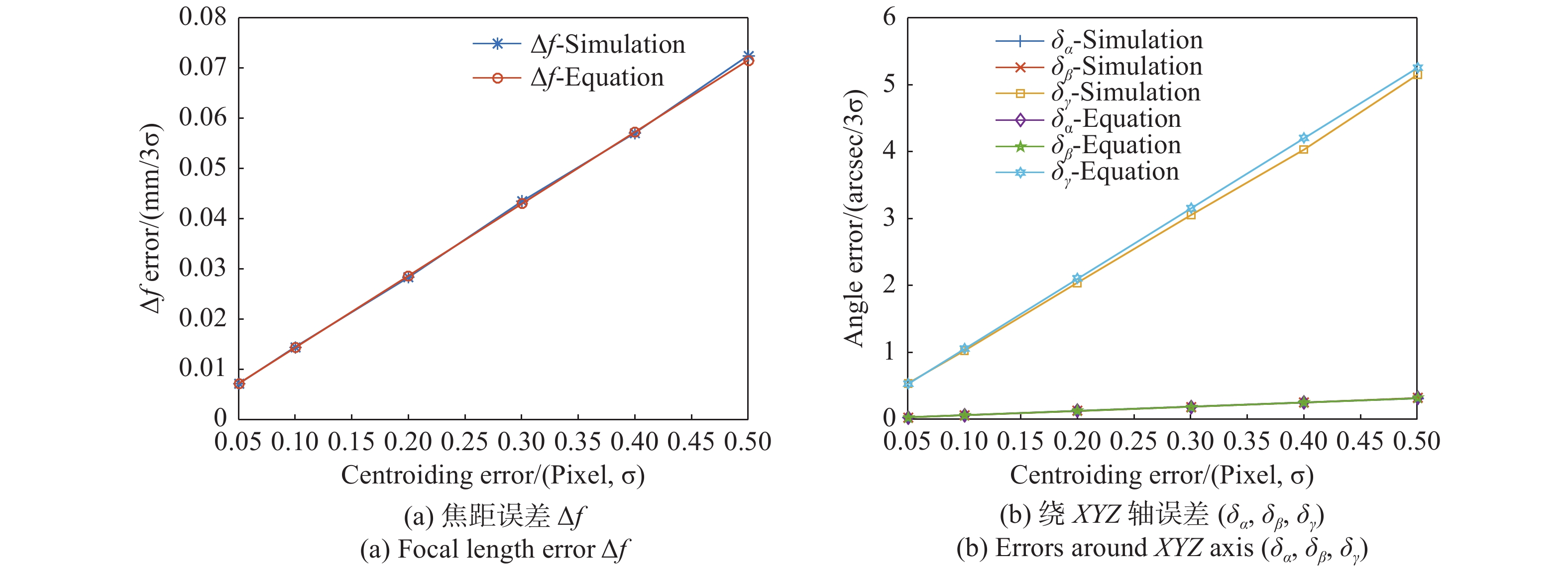
图 4 不同质心提取精度时各内外参数误差
Figure 4. Errors of internal and external parameters with different centroid extraction accuracy
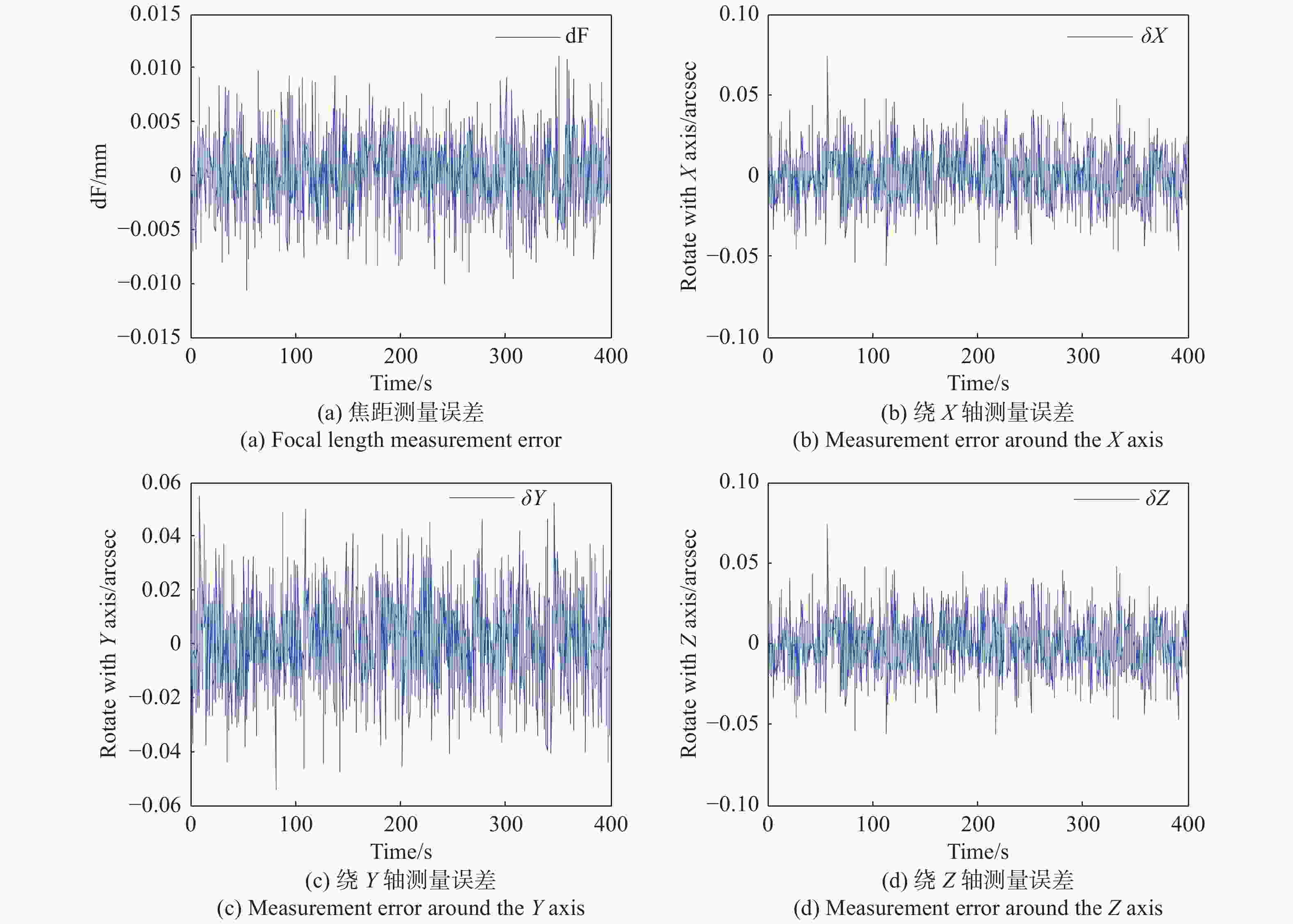
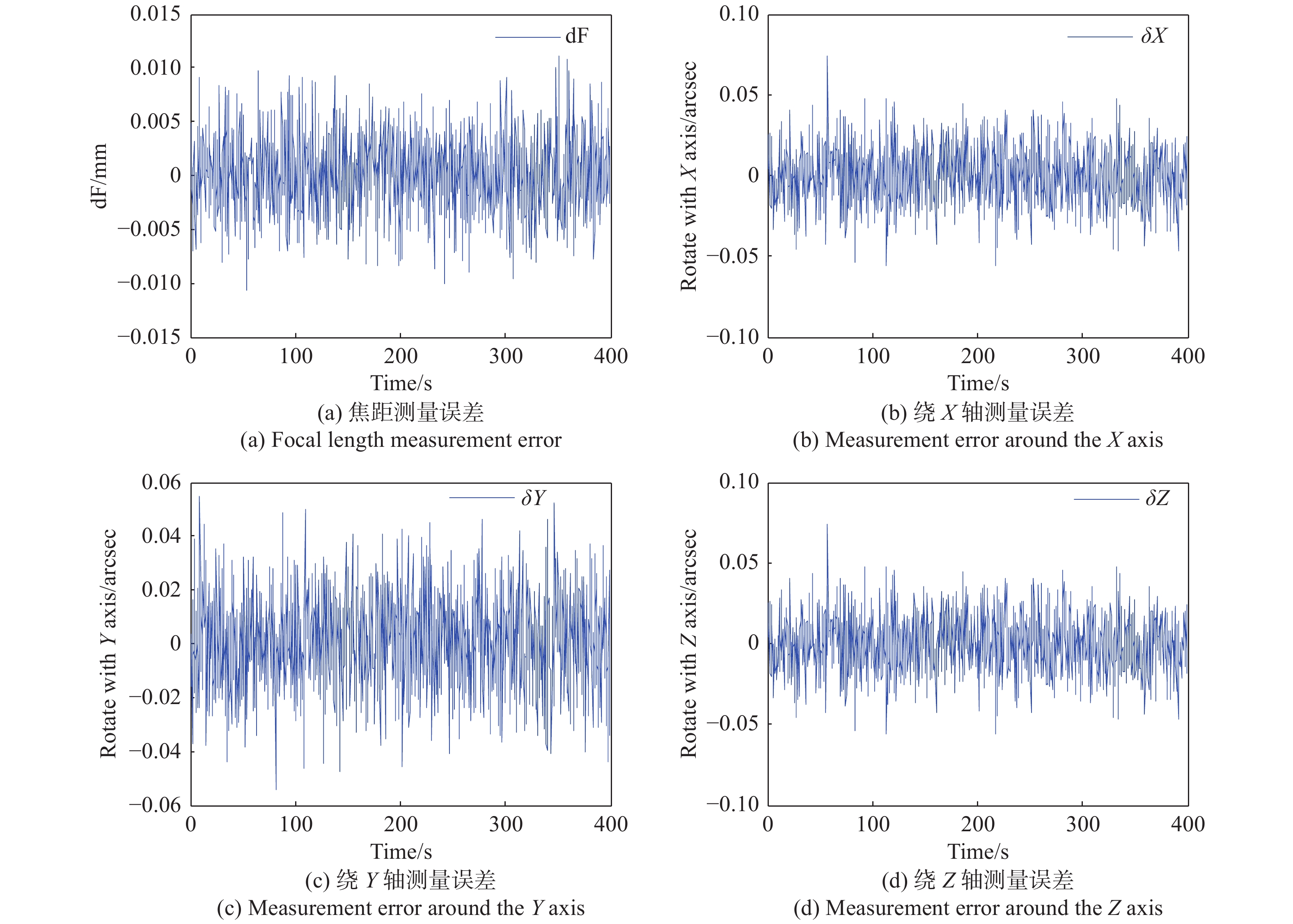
图 5 质心提取精度为0.1pixel时各测量参数误差
Figure 5. Error of each measurement parameter with the centroid extraction accuracy of 0.1 pixel

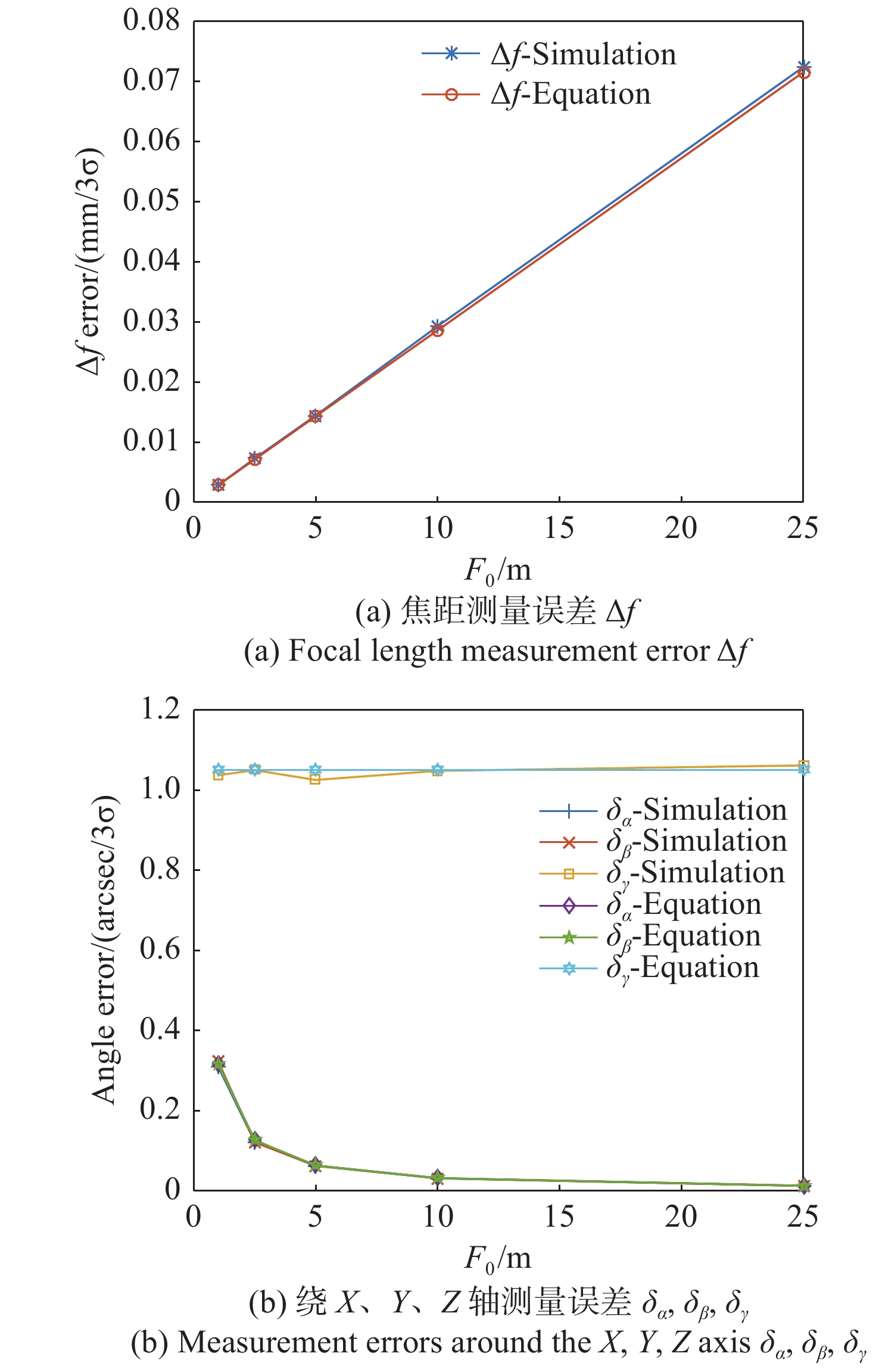
图 6 不同焦距时各测量参数误差
Figure 6. The errors of each measurement parameter at different focal lengths
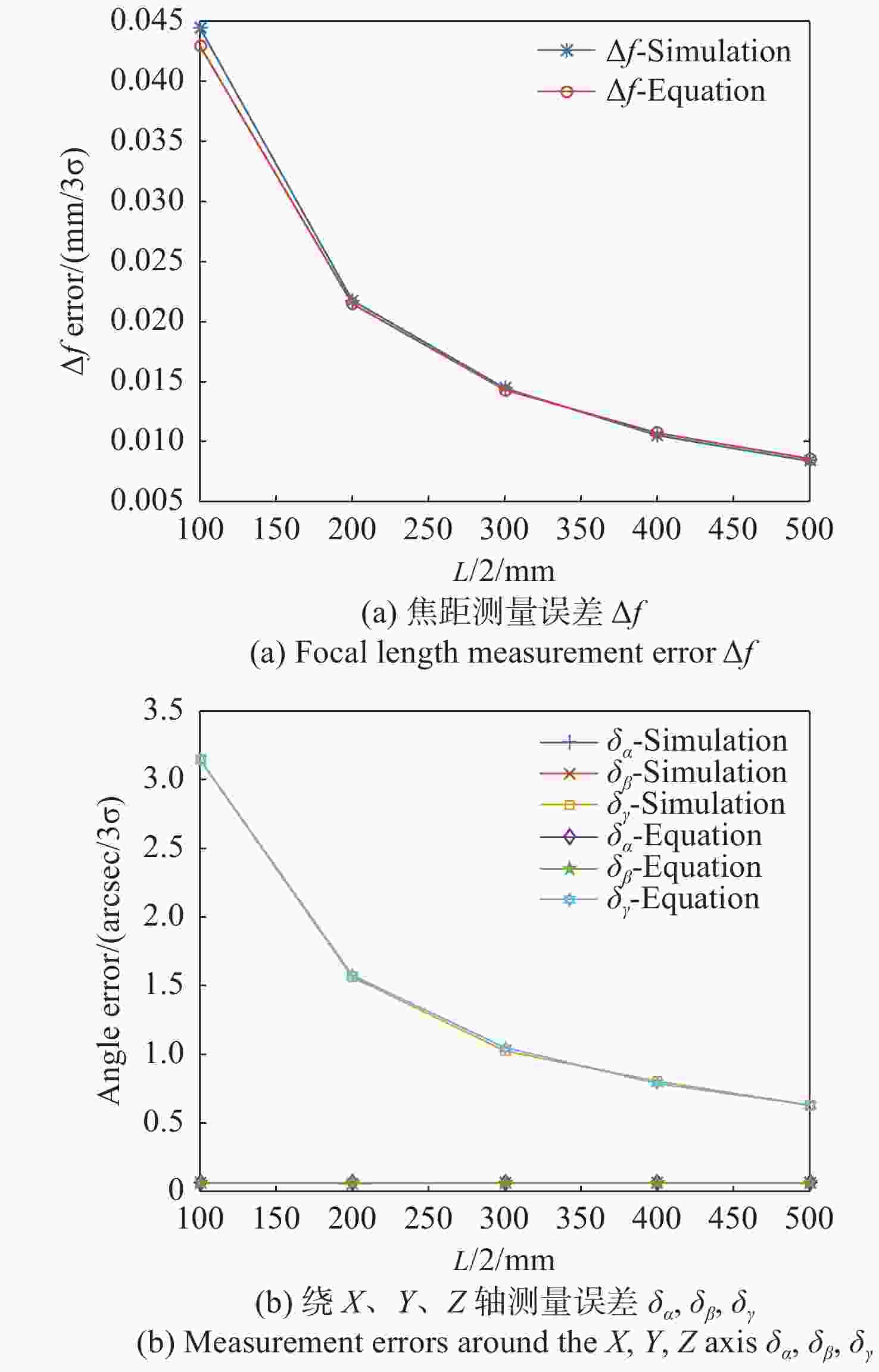
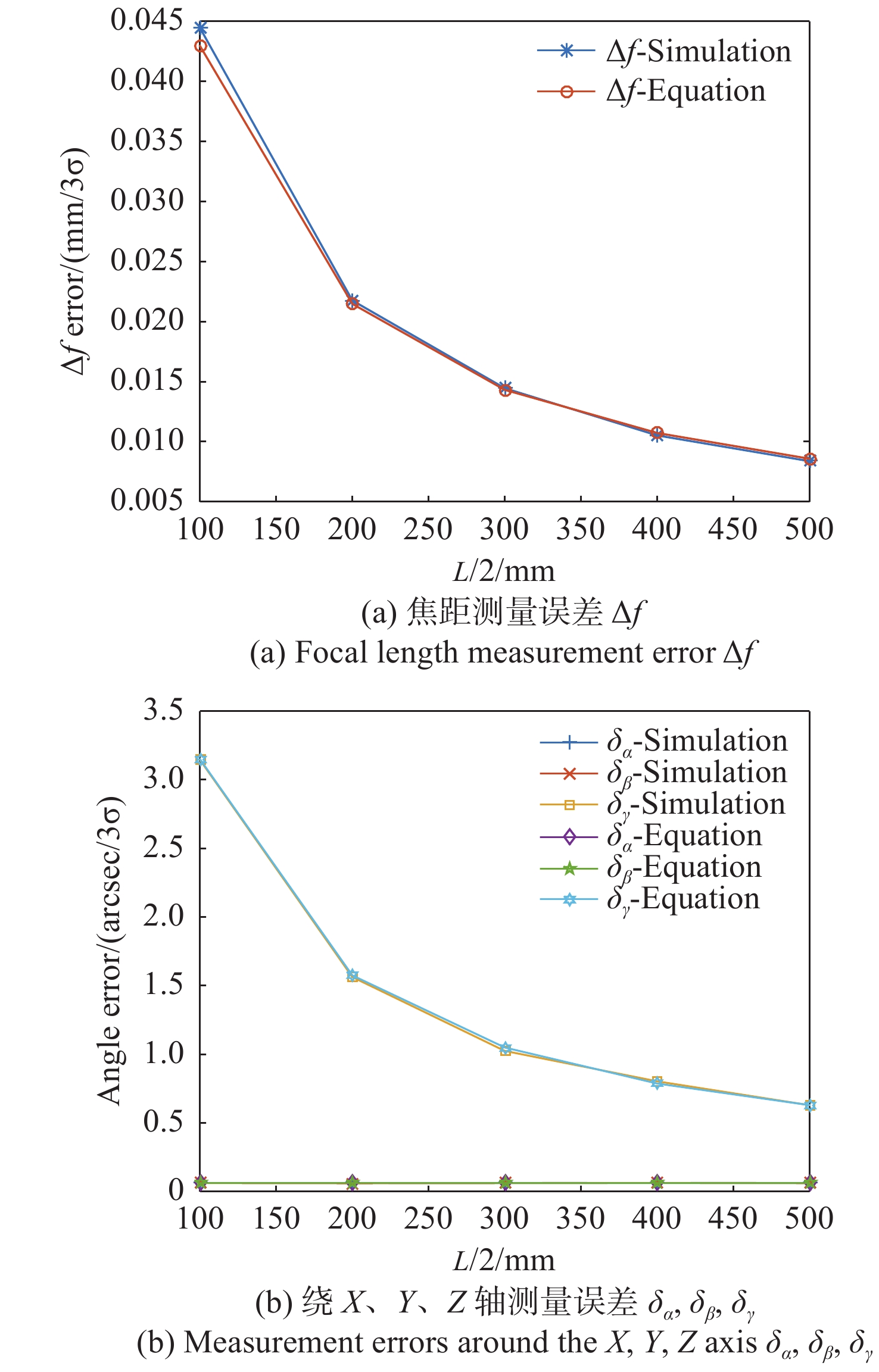
图 7 不同CMOS探测器件间距L时各测量参数误差
Figure 7. The errors of each measurement parameter at different device spacing L
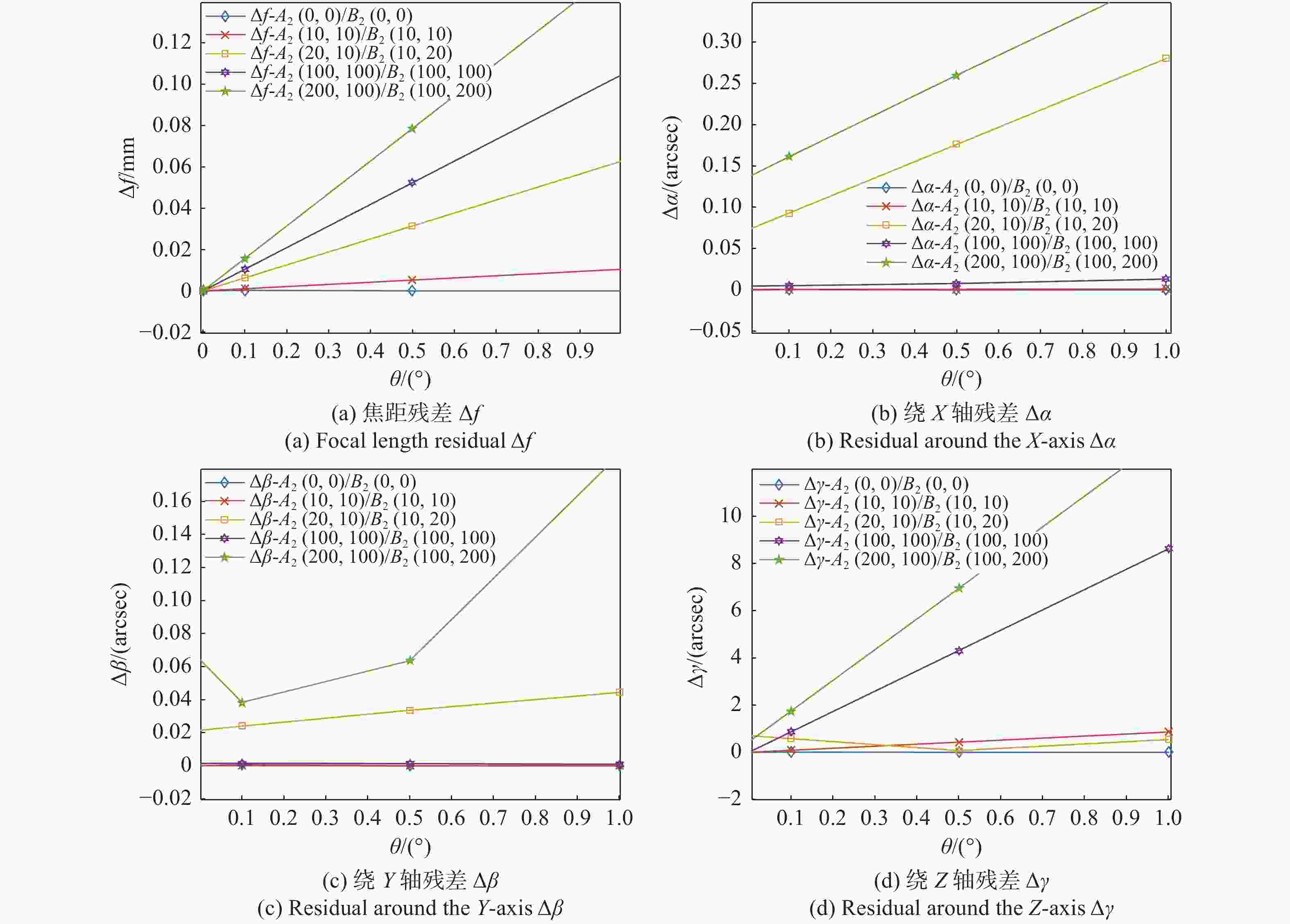
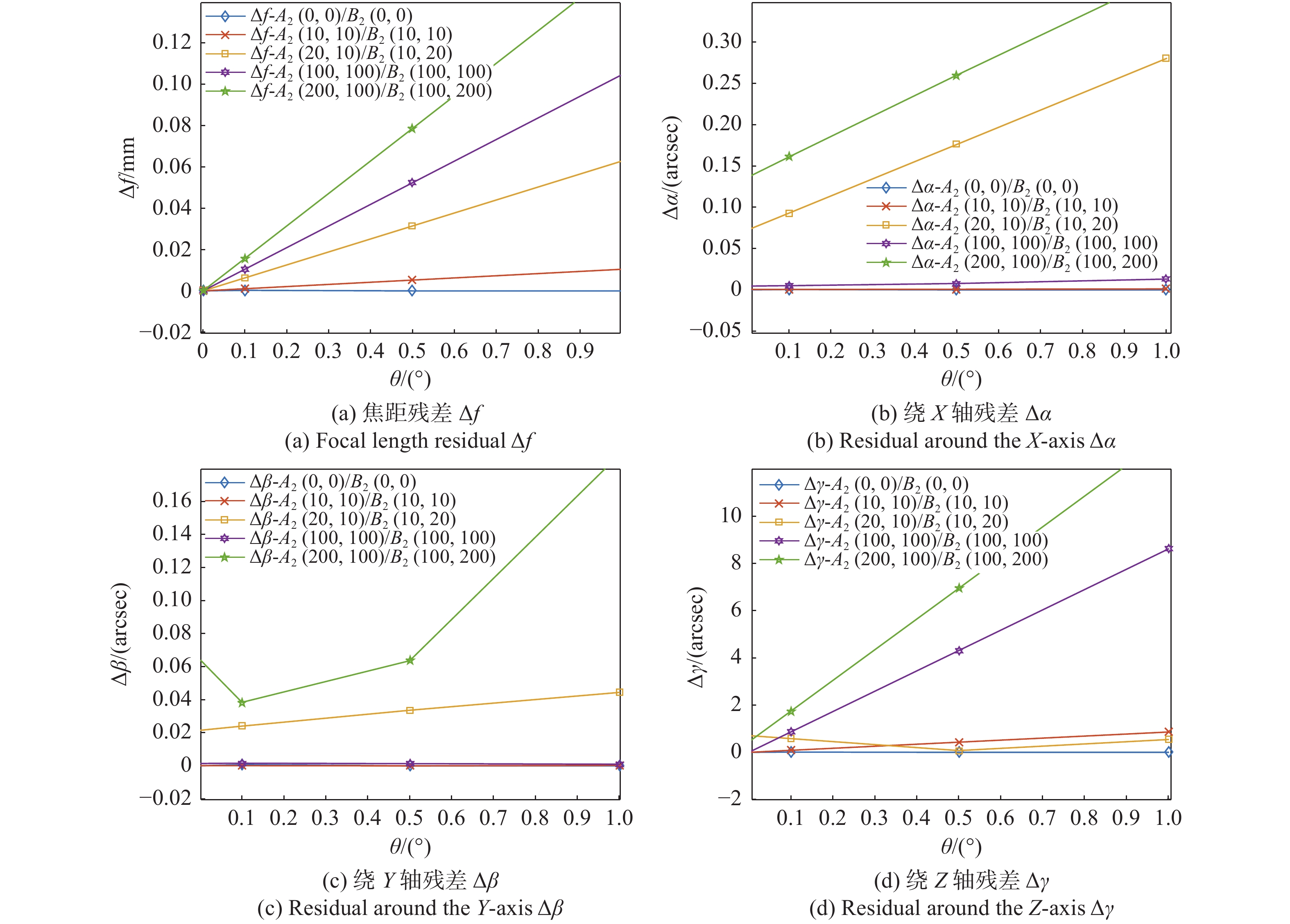
图 8 双矢量方法和简化方法计算得到的内外参残差
Figure 8. Internal and external parameter residuals calculated by DVAD and simplified algorithm

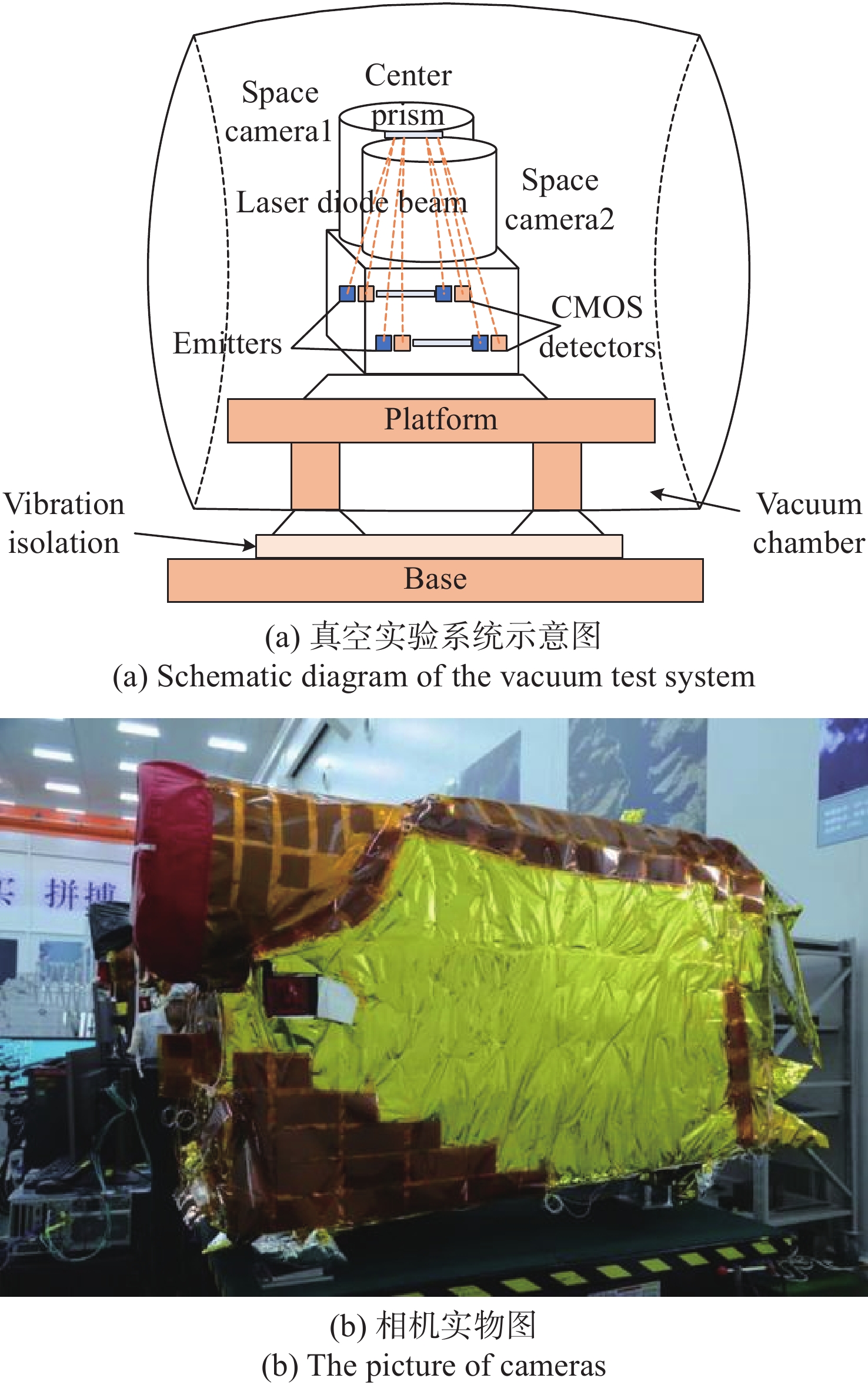
图 9 相机内外参数标定真空试验系统示意图及相机实物图
Figure 9. Schematic diagram of vacuum test system for internal and external parameter calibration and the picture of cameras
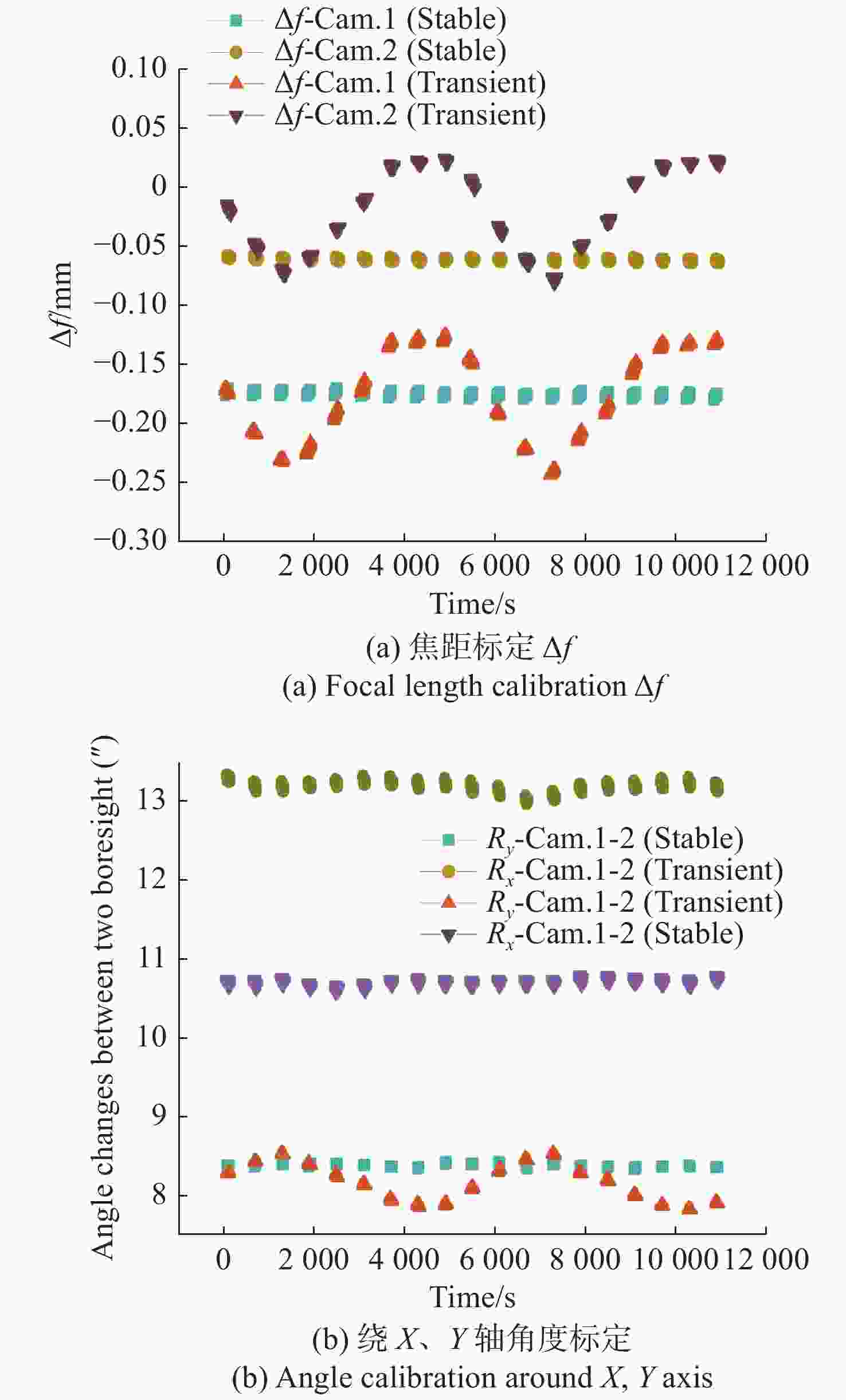
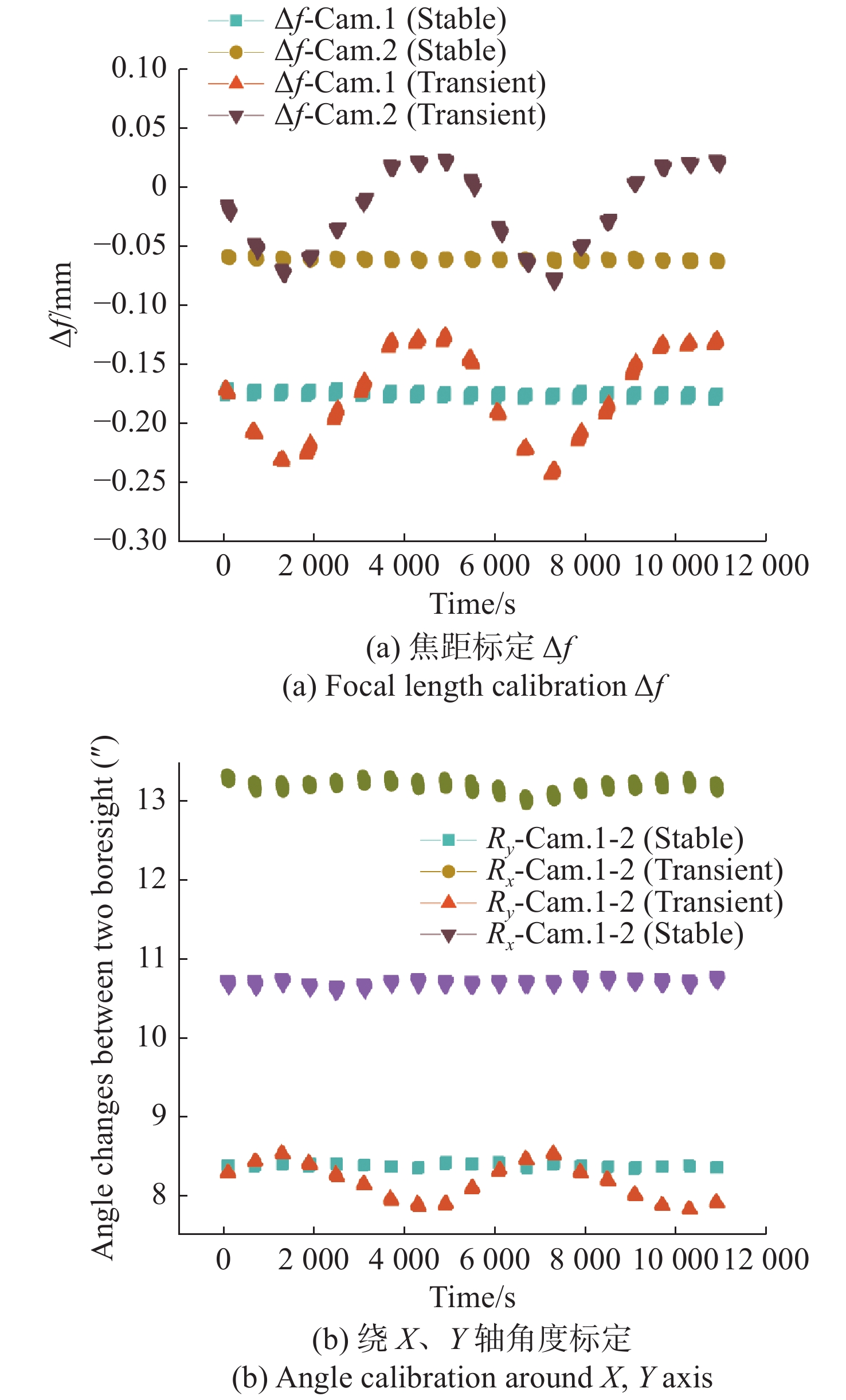
图 10 热真空环境下相机内外参在连续2个循环内的标定结果
Figure 10. Internal and external parameter calibration results in a thermal vacuum in 2 circles
表 1 基本输入参数
Table 1. Basic input parameters
符号 定义 $ {OX_{{\text{OTA}}}}{Y_{{\text{OTA}}}}{Z_{{\text{OTA}}}} $ 镜头物方坐标系, $ O $为坐标原点, ${O' X' _{ {\text{OTA} } } }{ Y' _{ {\text{OTA} } } }{ Z_{ {\text{OTA} } } }$ 镜头像方坐标系,$ O' $为坐标原点,$ O'{X'_{{\text{OTA}}}} $从原点指向CCD线阵中心,$ {O'Z_{{\text{OTA}}}} $为视轴方向,第三轴符合右手定则 $ {OX_{{\text{HRC}}}}{Y_{{\text{HRC}}}}{Z_{{\text{HRC}}}} $ 相机坐标系, $ {Z_{{\text{HRC}}}} $从CCD中心指向$O $点, $ {Y_{{\text{HRC}}}} $与 $ {Y_{{\text{OTA}}}} $方向一致 $M_1 M_2 $ 焦平面上分置于CCD两端的面阵探测器 $ {\theta _{m1}},{\theta _{m2}} $ M1,M2探测器转角 $ \begin{array}{l}{A}_{0}({x}_{c1},{y}_{c1}),\\ {B}_{0}({x}_{c2},{y}_{c2})\end{array} $ M1,M2探测器中心点 $ \begin{array}{l}{A}_{1}({x}_{01},{y}_{01}),\\ {B}_{1}({x}_{02},{y}_{02})\end{array} $ M1,M2探测器坐标系下的初始坐标 $ \begin{array}{l}{A}_{2}({x}_{11},{y}_{11}),\\ {B}_{2}({x}_{22},{y}_{22})\end{array} $ M1,M2探测器坐标系下的实测坐标 $ {F_{{\text{OTA}}}} $ 相机焦距 $ \omega $ 离轴角  下载: 导出CSV
下载: 导出CSV
表 2 基本输入参数
Table 2. Basic input parameters
参数 数值 像素大小$ d $/μm 10 离轴角$ \omega $/(°) 6 尺度因子/$ Kf $ 0.5 M1探测器转角$ {\theta _{m1}} $/(°) 0 M2探测器转角$ {\theta _{m2}} $/(°) 0 M1初始点坐标 A1/pixel (0,0) M2初始点坐标B1/pixel (0,0) 焦距, $ F_0 $/mm 6000 $ {L_{c1}} $/mm 500 $ {L_{c2}} $/mm −500 M1、M2 探测器像素规模 5120×3840
下载: 导出CSV
-
[1] GLEYZES J P, MEYGRET A, FRATTER C, et al.. SPOT5: system overview and image ground segment[C]. IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium. Proceedings (IEEE Cat. No. 03CH37477), IEEE, 2003, 1: 300-302. [2] SUBRAHMANYAM D, KURIAKOSE S A, KUMAR P, et al. Design and development of the Cartosat payload for IRS P5 mission[J]. Proceedings of SPIE, 2006, 6405: 640517. doi: 10.1117/12.693860 [3] SHIMODA H. Overview of Japanese Earth observation programs[J]. Proceedings of SPIE, 2011, 8176: 81760E. [4] WANG J R, WANG R X, HU X, et al. The on-orbit calibration of geometric parameters of the Tian-Hui 1 (TH-1) satellite[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 124: 144-151. doi: 10.1016/j.isprsjprs.2017.01.003 [5] XIE J F, TANG H ZH, DOU X H, et al.. On-orbit calibration of domestic APS star tracker[C]. 2014 Third International Workshop on Earth Observation and Remote Sensing Applications (EORSA), IEEE, 2014: 239-242. [6] XIE J F, WANG X. A robust autonomous star identification algorithm for ZY3 satellite[C]. 2012 First International Conference on Agro- Geoinformatics (Agro-Geoinformatics), IEEE, 2012: 1-4. [7] WEI X G, ZHANG G J, FAN Q Y, et al. Star sensor calibration based on integrated modelling with intrinsic and extrinsic parameters[J]. Measurement, 2014, 55: 117-125. doi: 10.1016/j.measurement.2014.04.026 [8] XIONG K, WEI X G, ZHANG G J, et al. High-accuracy star sensor calibration based on intrinsic and extrinsic parameter decoupling[J]. Optical Engineering, 2015, 54(3): 034112. doi: 10.1117/1.OE.54.3.034112 [9] 王建荣, 王任享, 胡莘. 三线阵影像外方位元素平滑方程自适应光束法平差[J]. 测绘学报,2018,47(7):968-972.WANG J R, WANG R X, HU X. Self-adaption bundle adjustment of three-line array image with smoothing equation of exterior orientation elements[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(7): 968-972. (in Chinese) [10] 王任享, 王建荣, 胡莘. 光学卫星摄影无控定位精度分析[J]. 测绘学报,2017,46(3):332-337.WANG R X, WANG J R, HU X. Analysis of location accuracy without ground control points of optical satellite imagery[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(3): 332-337. (in Chinese) [11] 黎明, 吴清文, 江帆, 等. 三线阵立体测绘相机热控系统的设计[J]. 光学 精密工程,2010,18(6):1367-1373.LI M, WU Q W, JIANG F, et al. Design of thermal control system for three-linear array mapping cameras[J]. Optics and Precision Engineering, 2010, 18(6): 1367-1373. (in Chinese) [12] 高洪涛, 罗文波, 史海涛, 等. 资源三号卫星结构稳定性设计与实现[J]. 航天器工程,2016,25(6):18-24.GAO H T, LUO W B, SHI H T, et al. Structural stability design and implementation of ZY-3 satellite[J]. Spacecraft Engineering, 2016, 25(6): 18-24. (in Chinese) [13] 高卫军, 孙立, 王长杰, 等. “资源三号”高分辨率立体测绘卫星三线阵相机设计与验证[J]. 航天返回与遥感,2012,33(3):25-34. doi: 10.3969/j.issn.1009-8518.2012.03.006GAO W J, SUN L, WANG CH J, et al. Design and verification of three-line array camera for ZY-3 high resolution stereo mapping satellite[J]. Spacecraft Recovery &Remote Sensing, 2012, 33(3): 25-34. (in Chinese) doi: 10.3969/j.issn.1009-8518.2012.03.006 [14] BAE S, WEBB C, SCHUTZ B. GLAS PAD calibration using laser reference sensor data[C]. AIAA/AAS Astrodynamics Specialist Conference and Exhibit, 2004: 1-10. [15] EVANS T. Optical development system life cycle for the ICESat-2 ATLAS instrument[C]. 2014 IEEE Aerospace Conference, 2014: 1-12. [16] 尤政, 王翀, 邢飞, 等. 空间遥感智能载荷及其关键技术[J]. 航天返回与遥感,2013,34(1):35-43.YOU ZH, WANG CH, XING F, et al. Key technologies of smart optical payload in space remote sensing[J]. Spacecraft Recovery &Remote Sensing, 2013, 34(1): 35-43. (in Chinese) [17] 来颖, 沈正祥, 王占山, 等. 基于菲涅尔双棱镜的在轨小角度测量方法[J]. 红外与激光工程,2016,45(3):0317002. doi: 10.3788/irla201645.0317002LAI Y, SHEN ZH X, WANG ZH SH, et al. Measurement method of in-orbit small angle based on Fresnel biprism[J]. Infrared and Laser Engineering, 2016, 45(3): 0317002. (in Chinese) doi: 10.3788/irla201645.0317002 [18] 王慧, 刘薇, 于建冬, 等. 航天光学相机几何参数星上监测技术[J]. 光子学报,2018,47(10):1012001. doi: 10.3788/gzxb20184710.1012001WANG H, LIU W, YU J D, et al. Geometric parameters monitoring technology for space optical camera[J]. Acta Photonica Sinica, 2018, 47(10): 1012001. (in Chinese) doi: 10.3788/gzxb20184710.1012001 [19] 高凌雁, 王伟之. 基于全光学路径的遥感相机视轴监测方法研究[J]. 光学技术,2019,45(1):44-48.GAO L Y, WANG W ZH. Research on space camera bore-sight monitor by a full-optical route[J]. Optical Technique, 2019, 45(1): 44-48. (in Chinese) [20] 温中凯, 张庆君, 李爽, 等. 空间光电跟瞄系统多光轴平行性标校研究[J]. 中国光学,2021,14(3):625-633. doi: 10.37188/CO.2020-0133WEN ZH K, ZHANG Q J, LI SH, et al. Multi-optical axis parallelism calibration of space photoelectric tracking and aiming system[J]. Chinese Optics, 2021, 14(3): 625-633. (in Chinese) doi: 10.37188/CO.2020-0133 -

 下载:
下载:

计量
- 文章访问数: 614
- HTML全文浏览量: 448
- PDF下载量: 151
- 被引次数: 0
