2023年 16卷 第4期
 摘要
摘要 HTML全文
HTML全文 PDF 11029KB
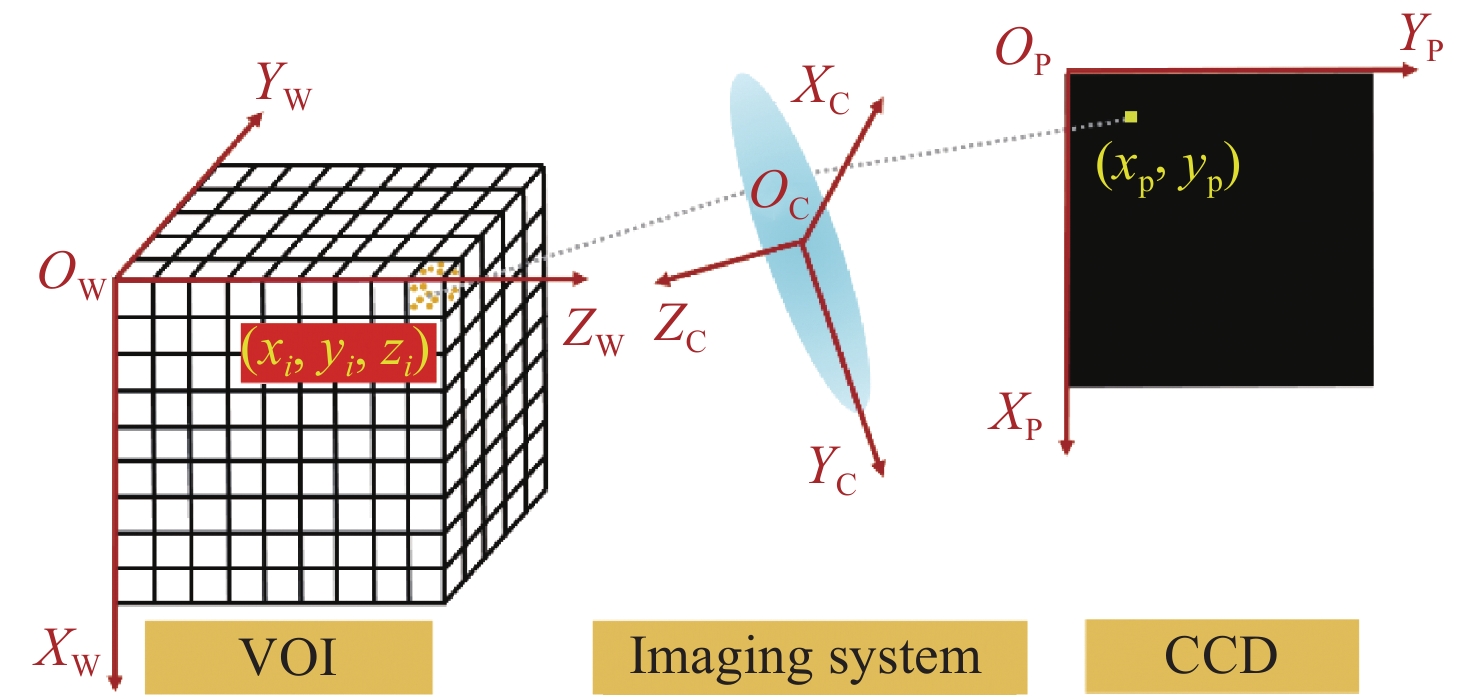
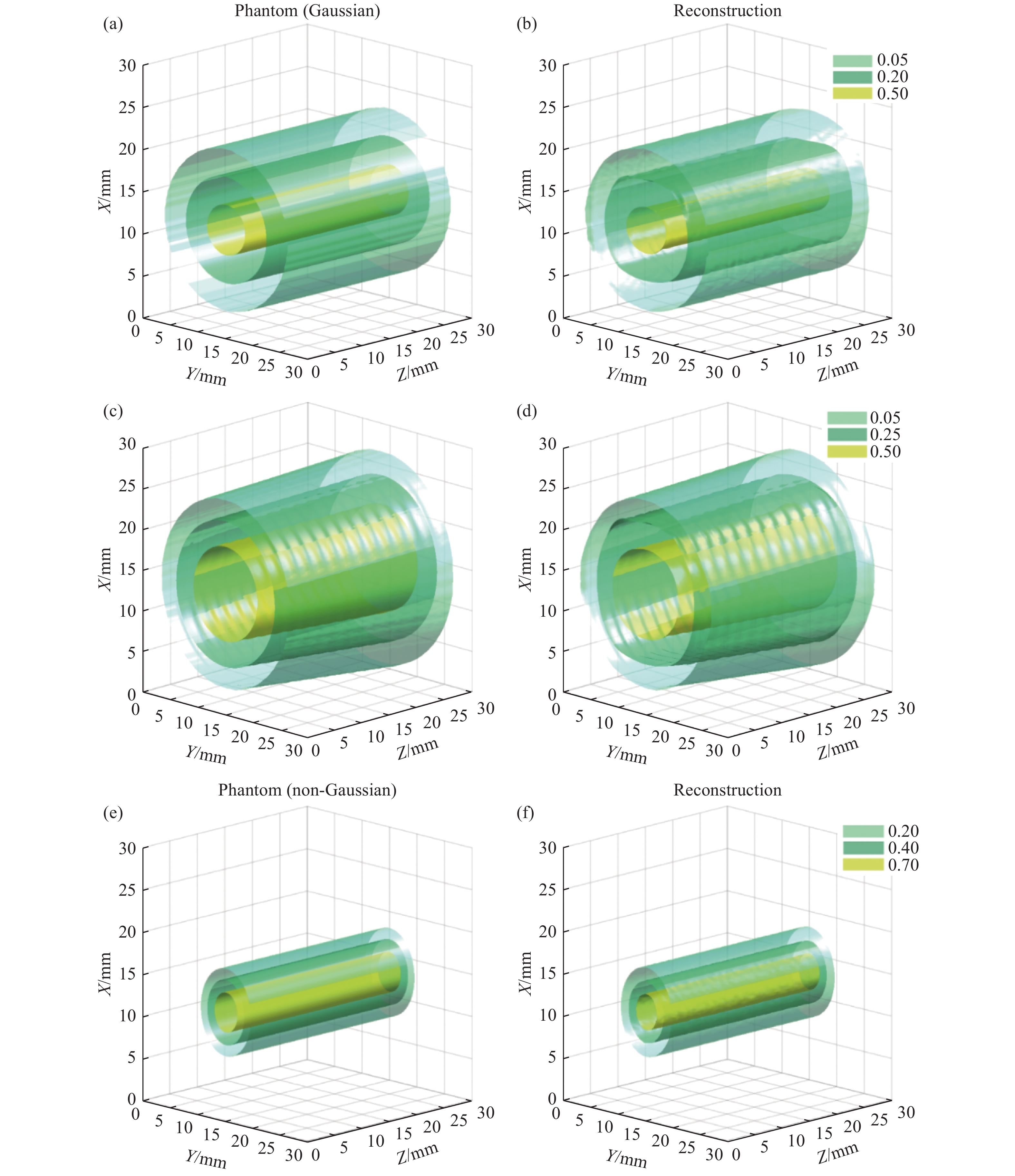
PDF 11029KB为了对激光光强分布进行准确测量,本文提出基于层析成像技术的激光光强分布测量方法。首先,通过数值仿真计算,对采用的成像模型的准确性以及重建算法的收敛性进行验证。对不同激光光强分布模型以及不同随机噪声等级时的重建精度进行评估。经计算,采用不同典型激光光强模型时其重建误差均小于等于7.02%;在施加10%以内随机噪声时,重建误差均小于8.5%。设计并搭建了层析成像系统,采用定制的一分七光纤束实现7七个角度信号的测量。7个角度分布在垂直于激光光束平面内的近半圆周内,各个角度距重建区域的距离约为160 mm,且7个角度的角度覆盖范围约为150°。实验通过探测激光光束穿过若丹明-乙醇溶液之后的体激光诱导荧光信号,结合后续的数据处理过程间接实现激光光强三维分布的反演。在数据处理过程中,采用交替迭代重建算法对探测信号进行吸收矫正的三维重建,可间接地获得激光光强分布。为了定量评估测量精度,在进行重建时仅采用其中6个角度,将余下一角度的重建反投影以及投影数据间的相关性用来间接证明此重建方法的可行性。计算结果表明,该角度投影以及反投影之间的相关性系数为0.9802,可间接的验证该方法的可行性。可以预见,本工作提出的激光光强三维测量方案在激光应用领域具有广泛的前景。


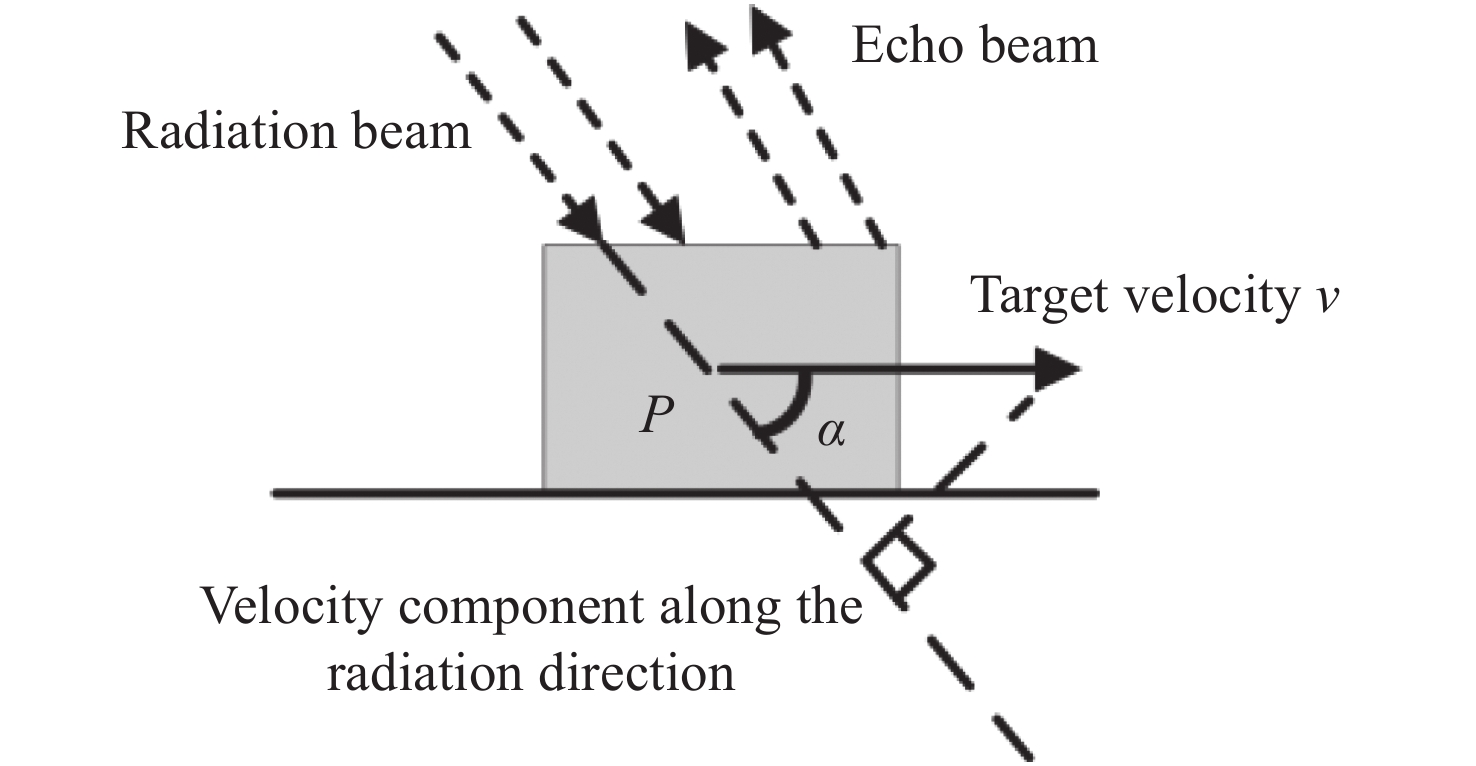
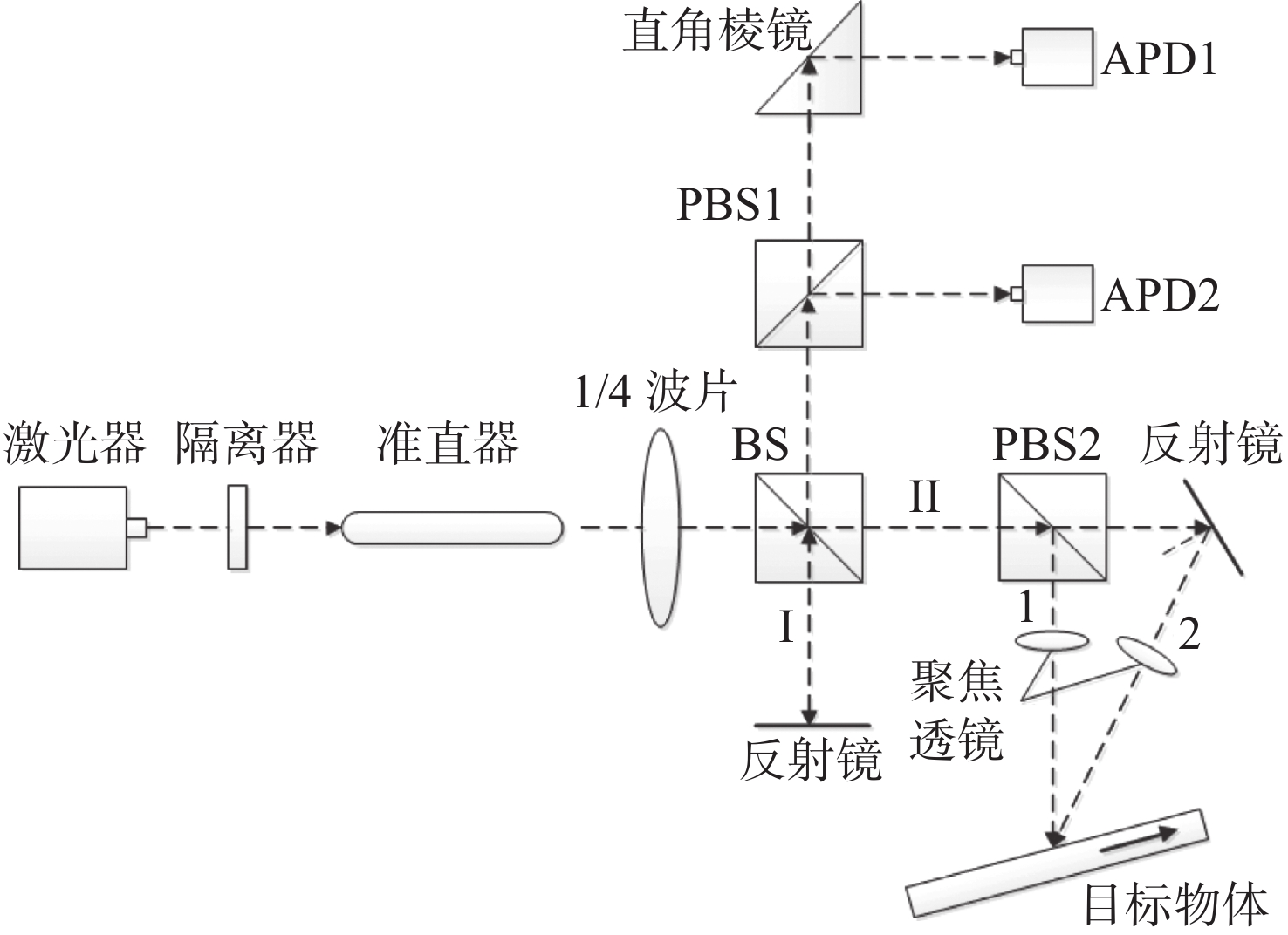
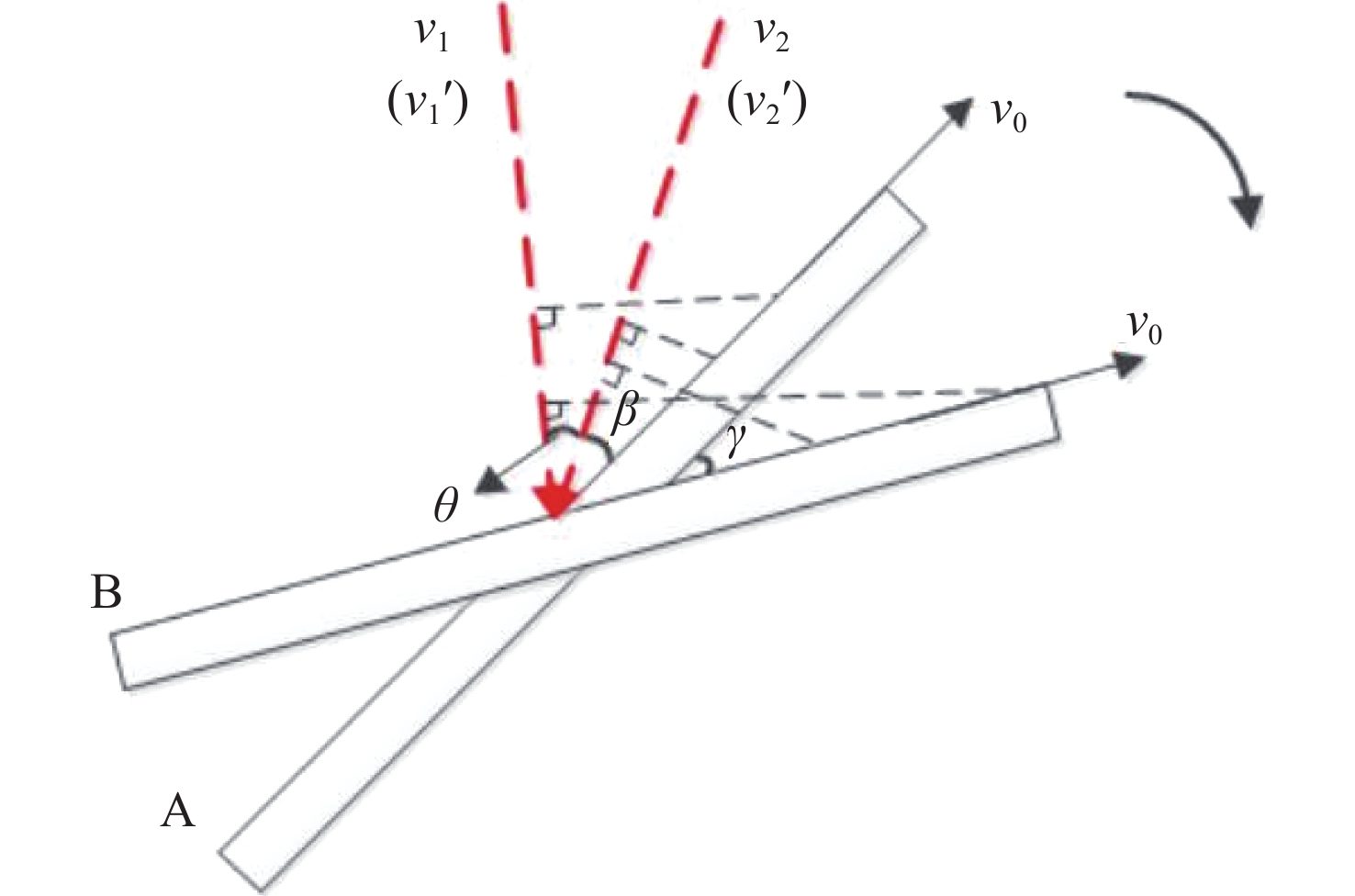
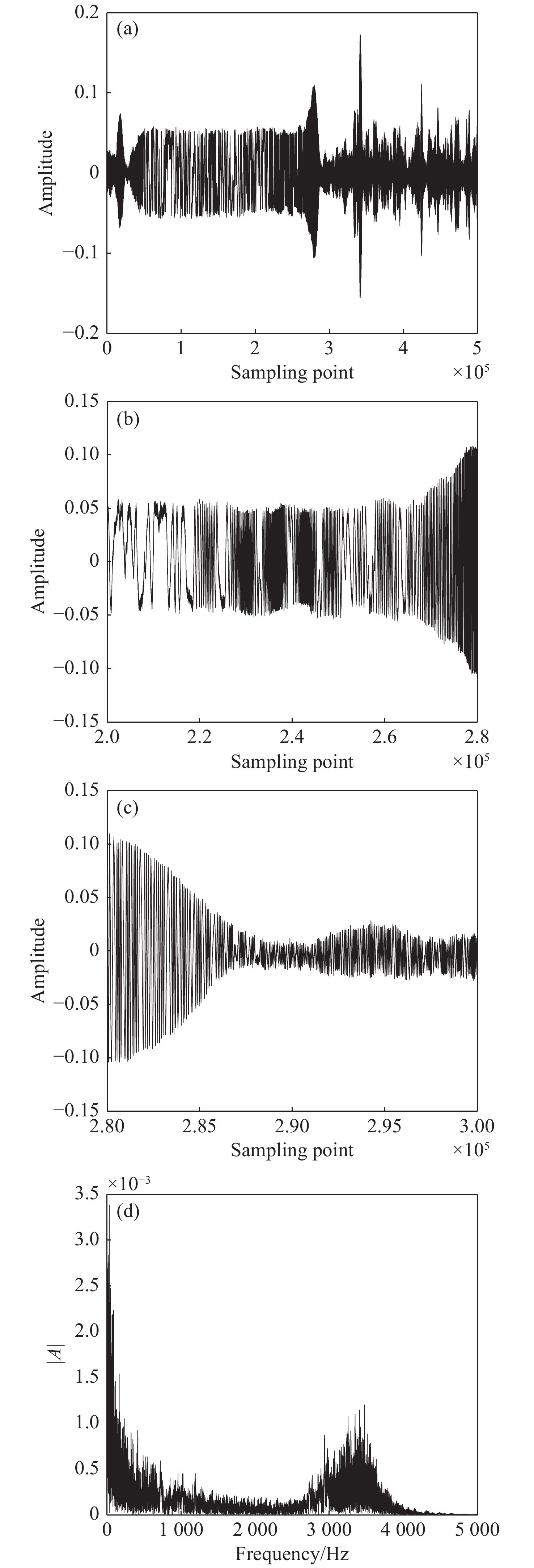
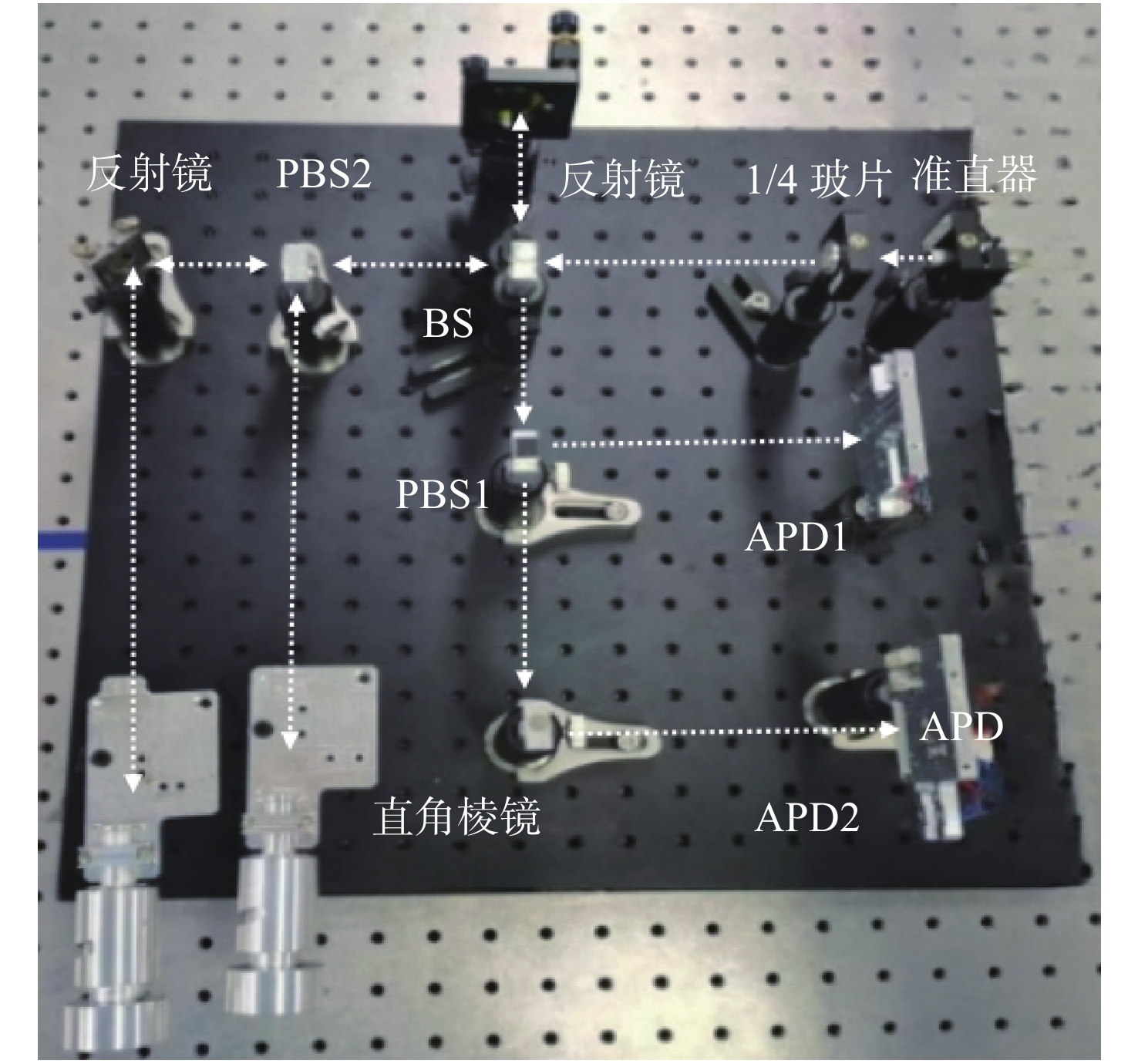
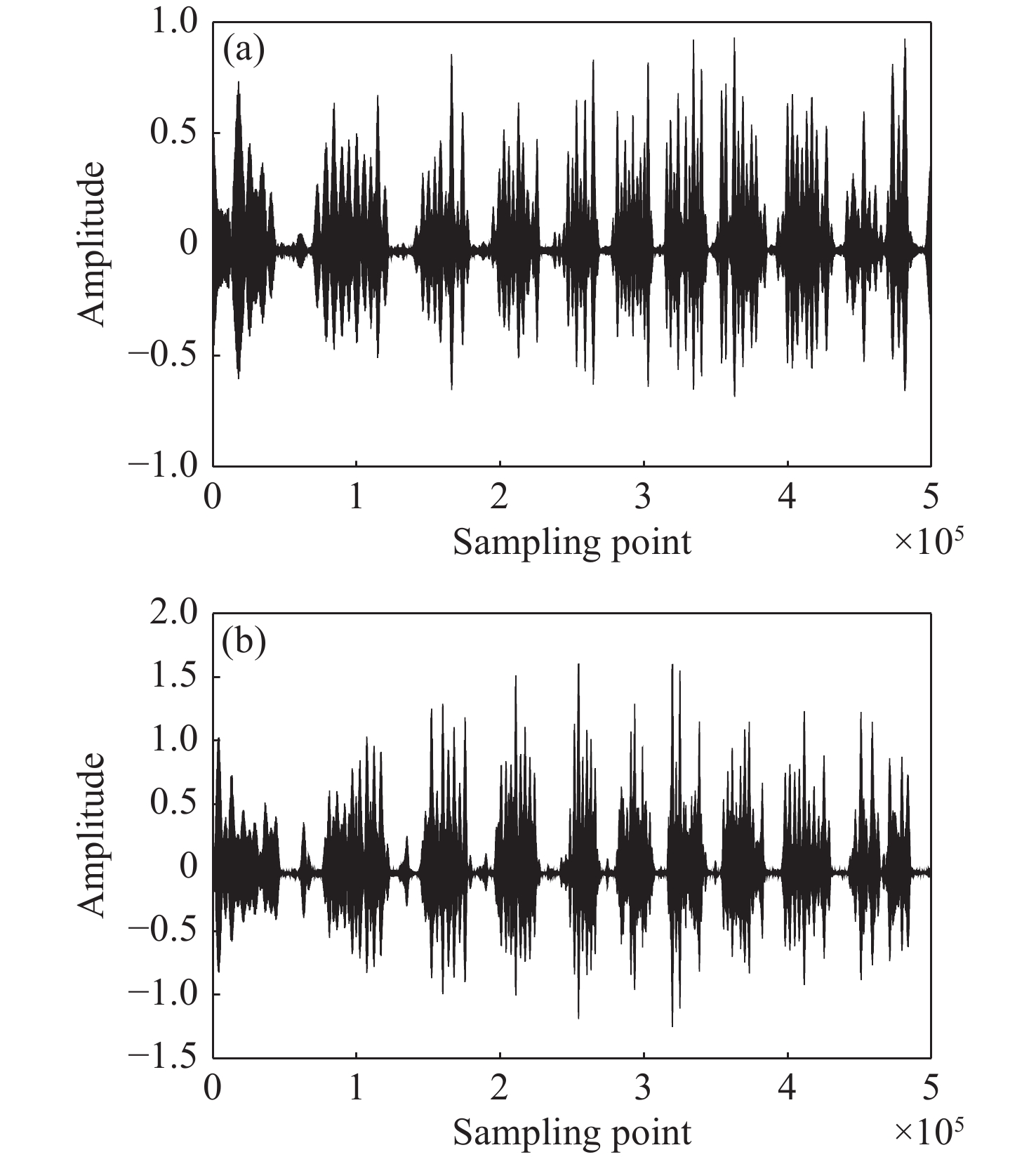
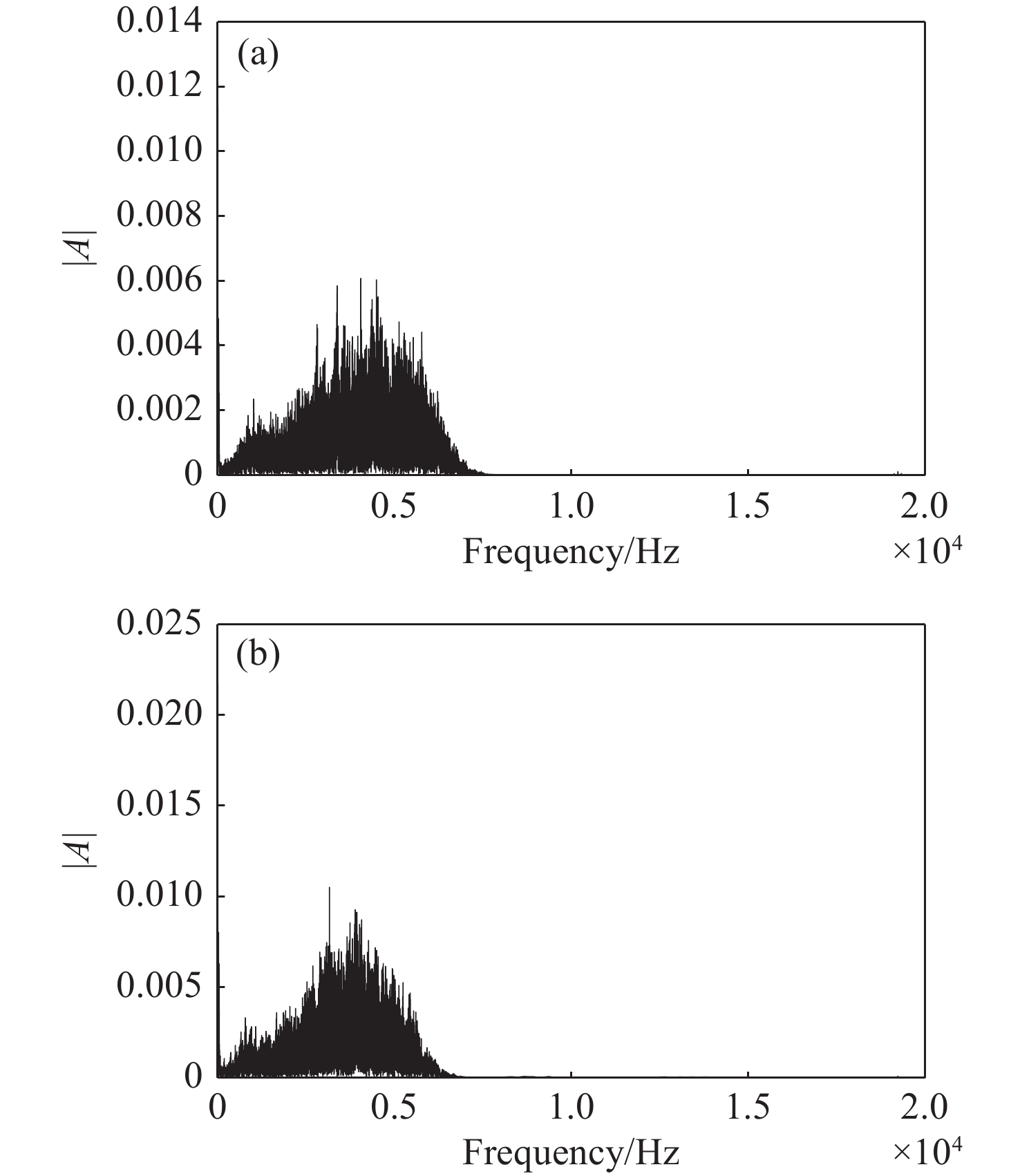
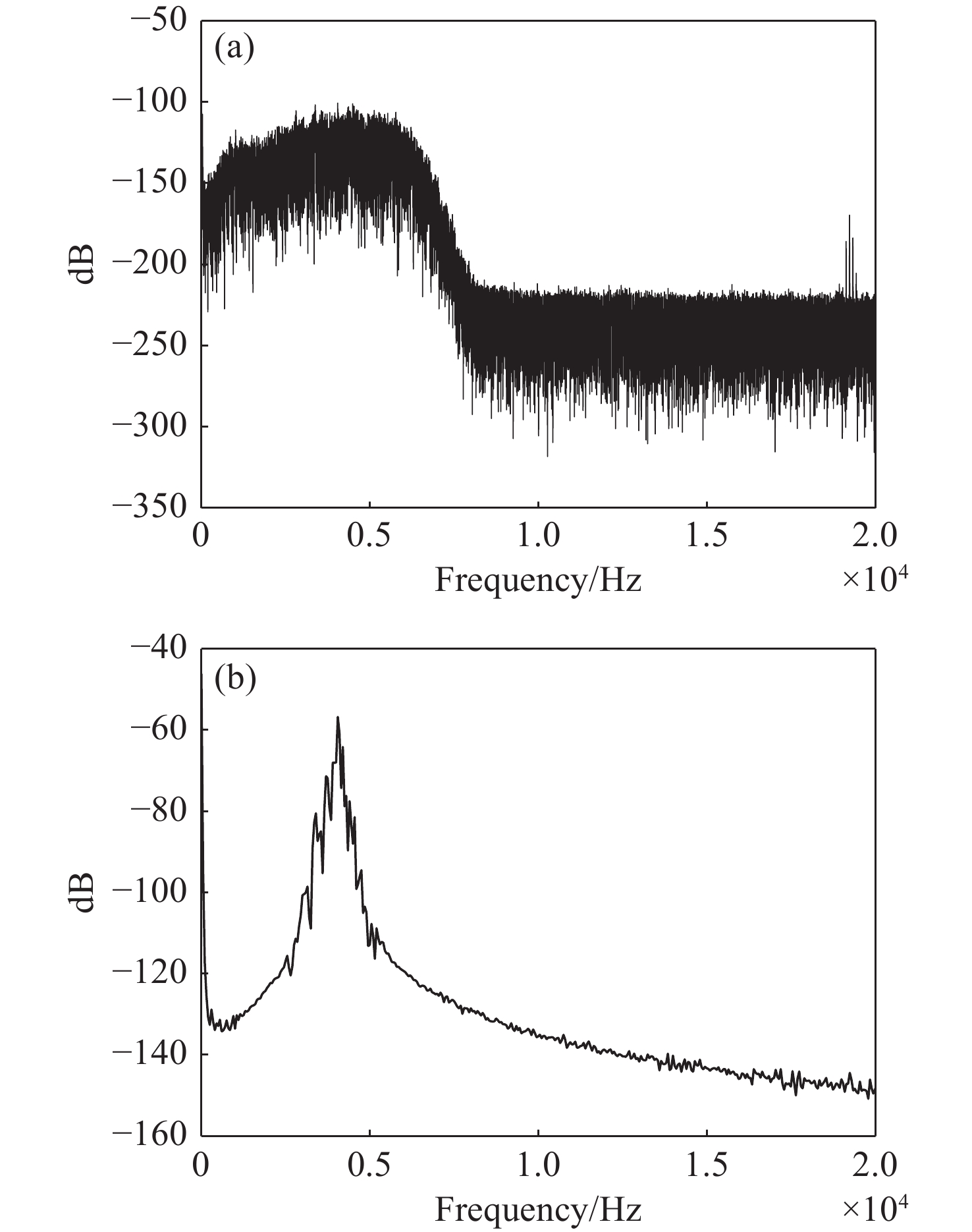
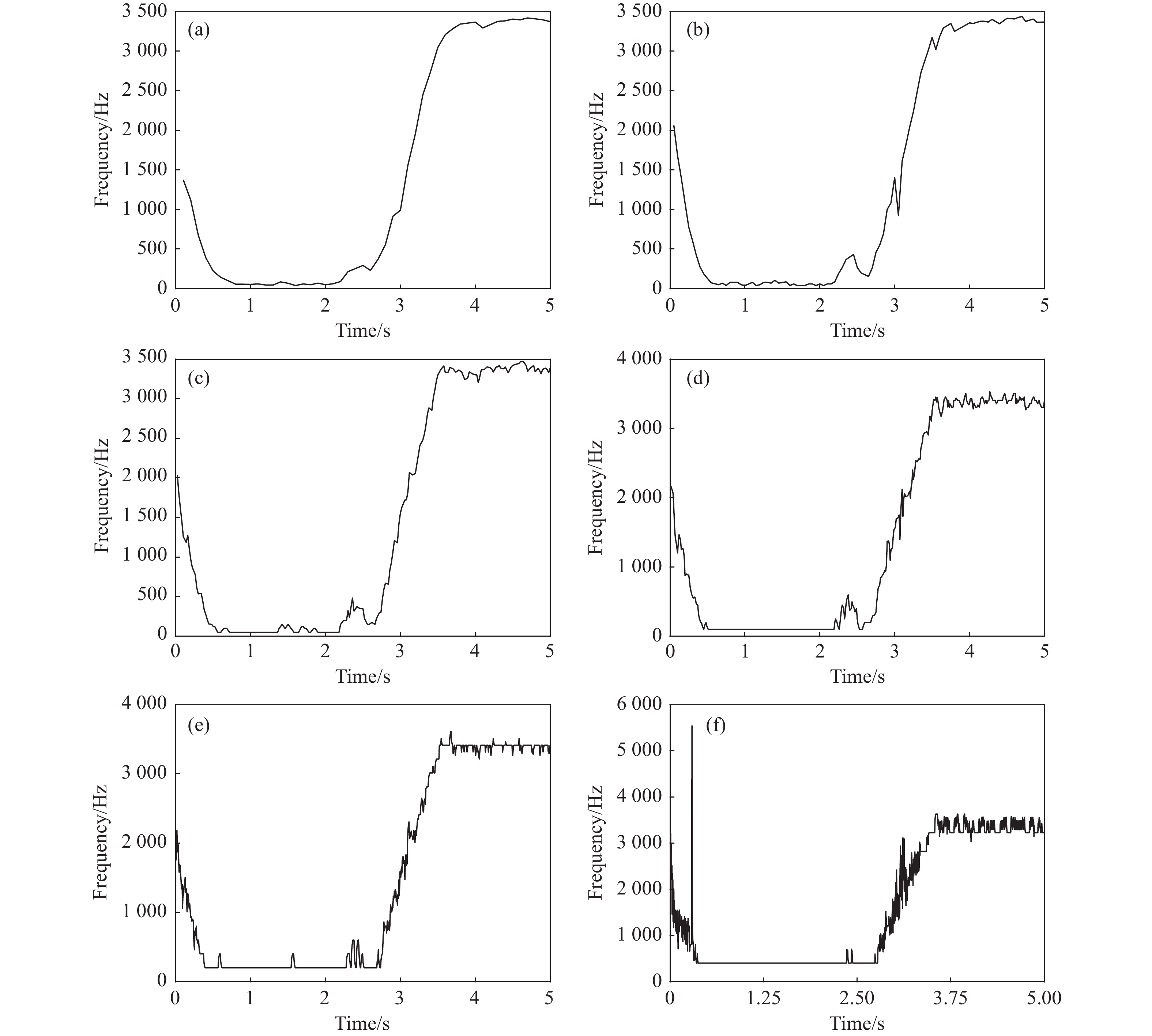
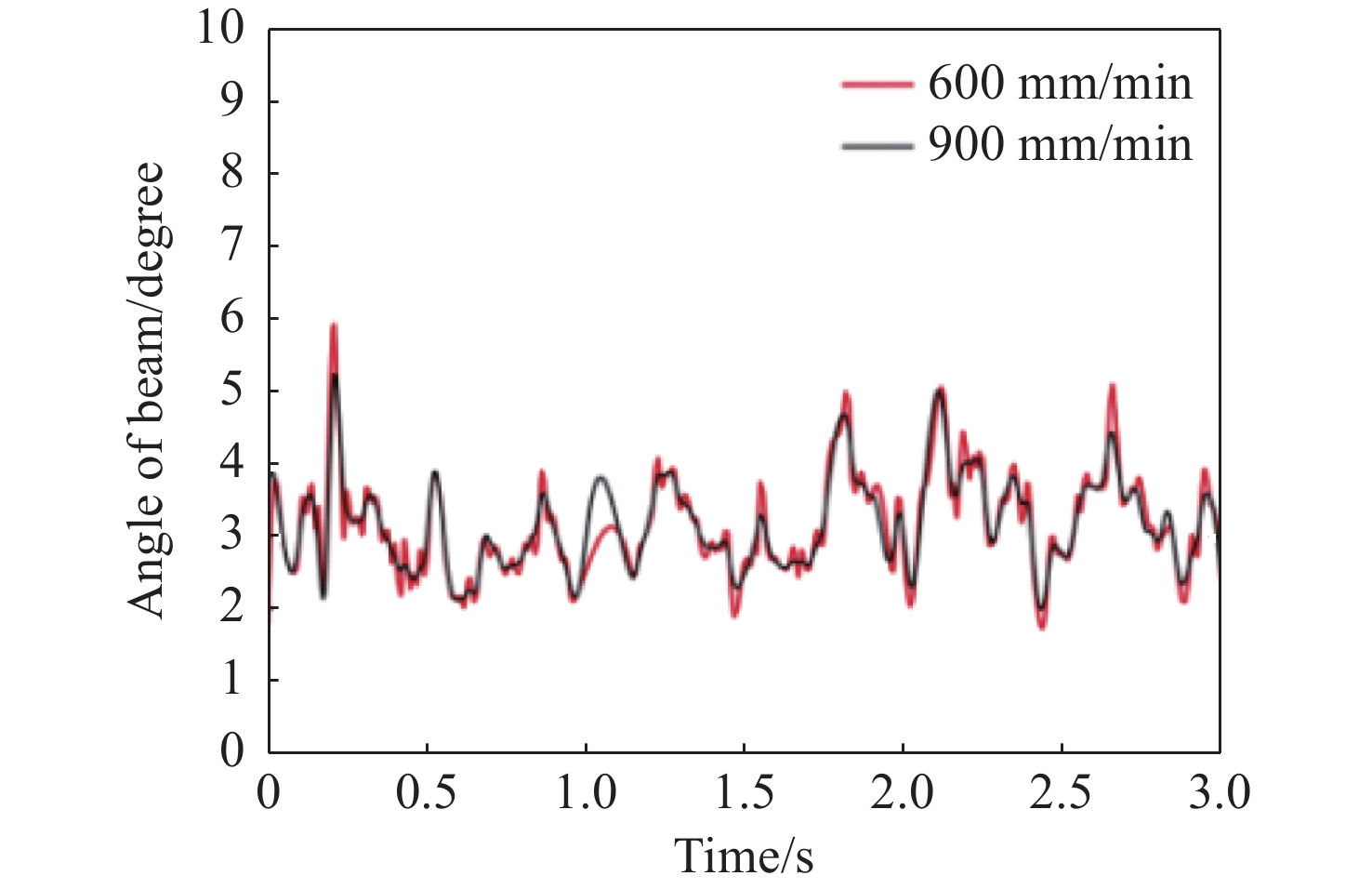
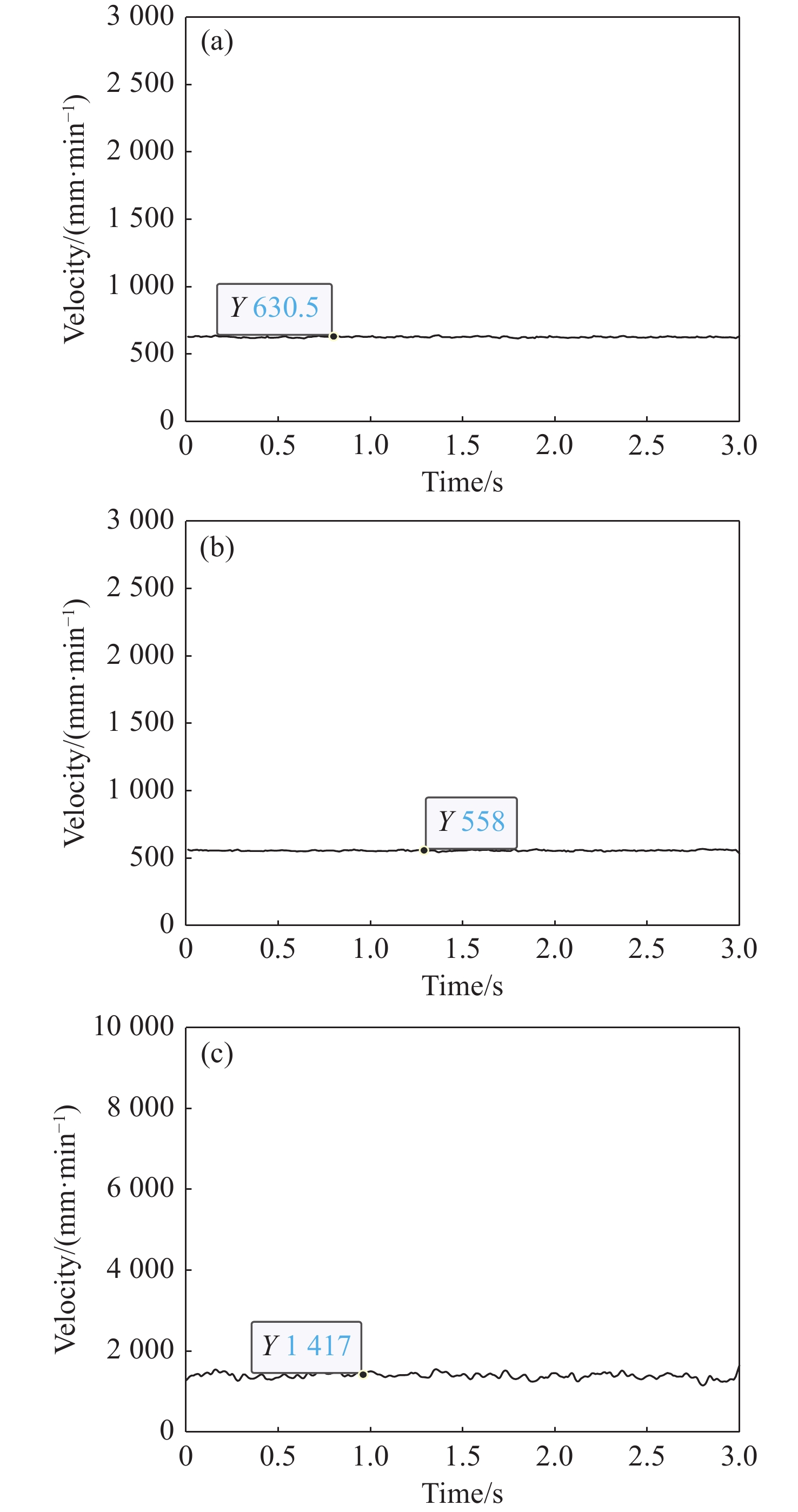
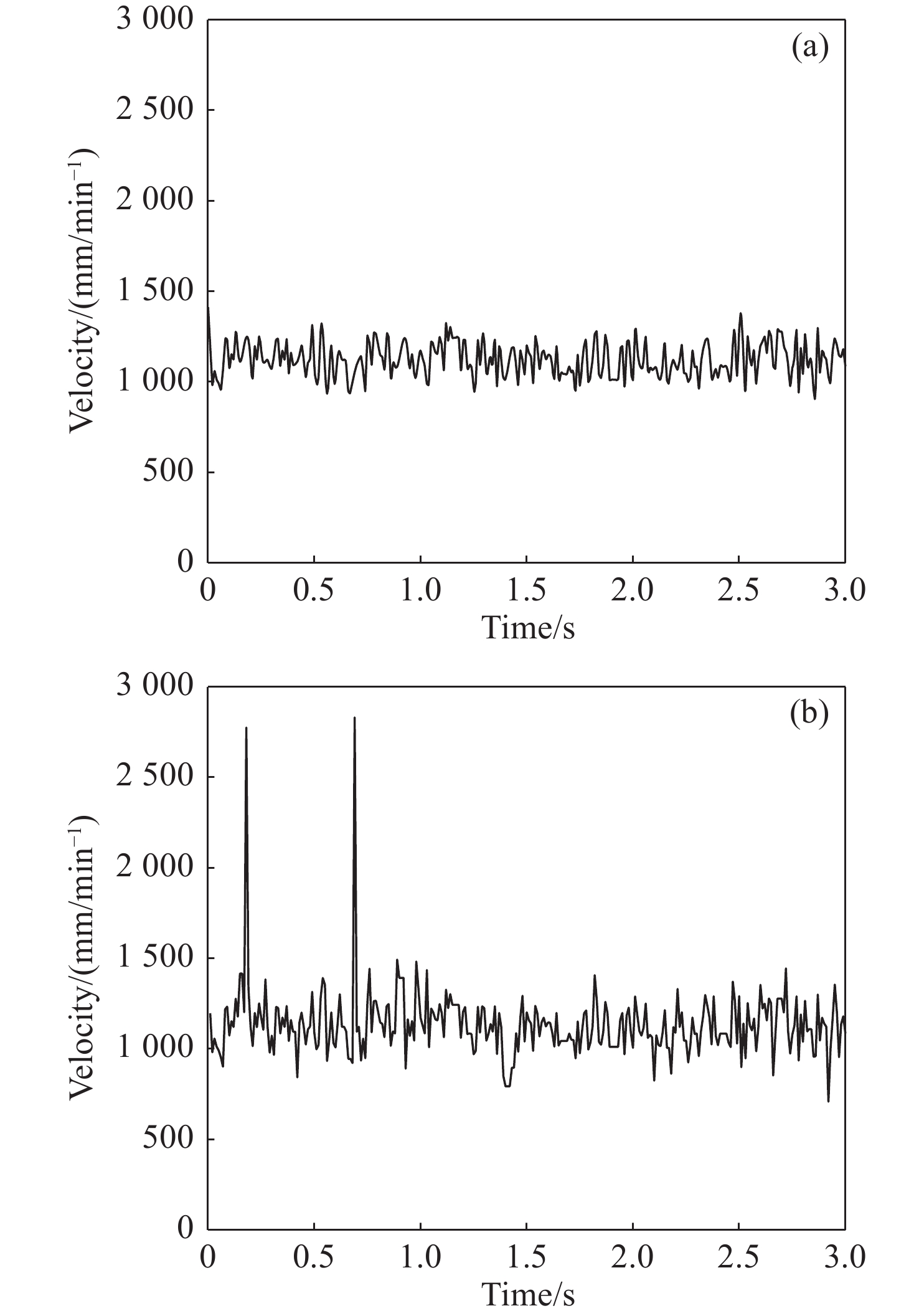
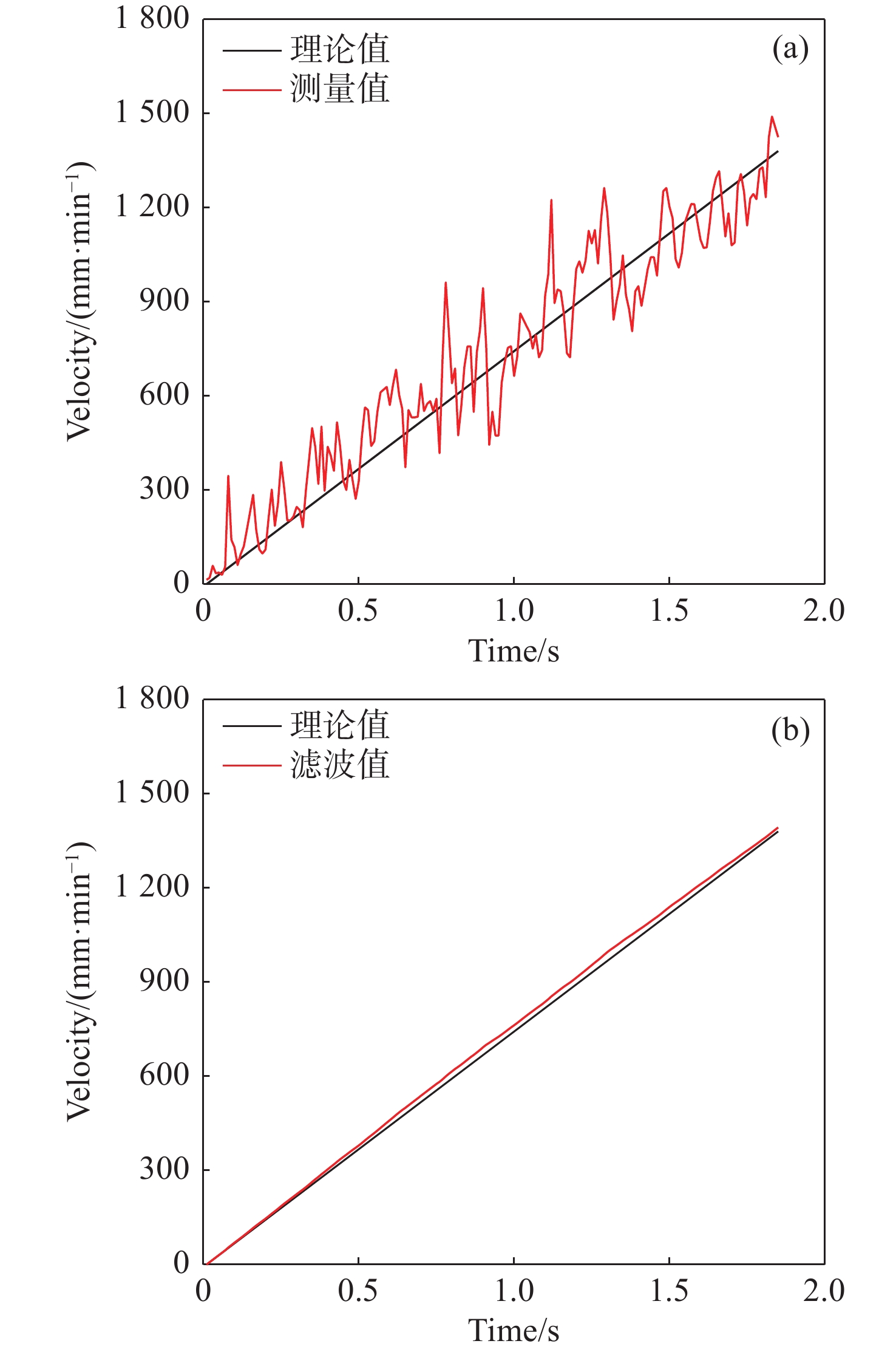
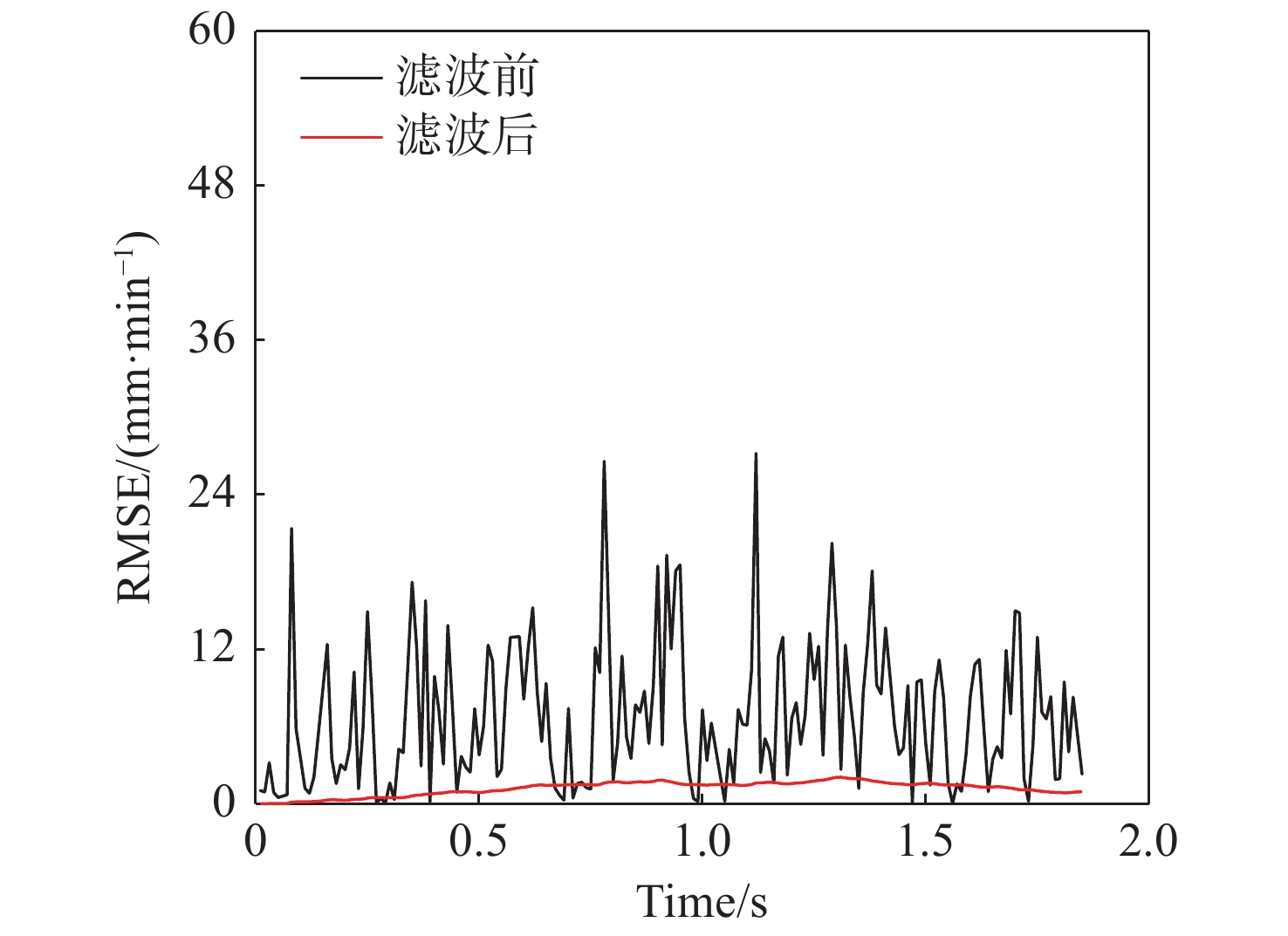
为了消除光束倾角带来的不确定性,本文建立了一种双路偏振式激光多普勒测速系统。该系统使用双光束双探头结构来探测物体的运动信息。首先,通过转动实验精确获得双光束间的夹角大小,对于任意光束倾角,本文采用双探头装置收集运动物体表面的散射光束,结合双路偏振式光路结构,得到两路干涉信号的多普勒频移。然后,创新性采用了细化分帧算法对两路干涉信号进行实时解调,通过两路速度分量的合成得到物体真实速度。实验结果表明:速度在10 mm/min~1500 mm/min范围内,测量值与理论值之间的平均误差可以达到1%~5%。在非平稳运动过程中,通过细化分帧算法修正后的v-t图像RMSE均值为1.19 mm/min。该系统结构满足速度测量的稳定可靠、精度高、抗干扰能力强等要求。



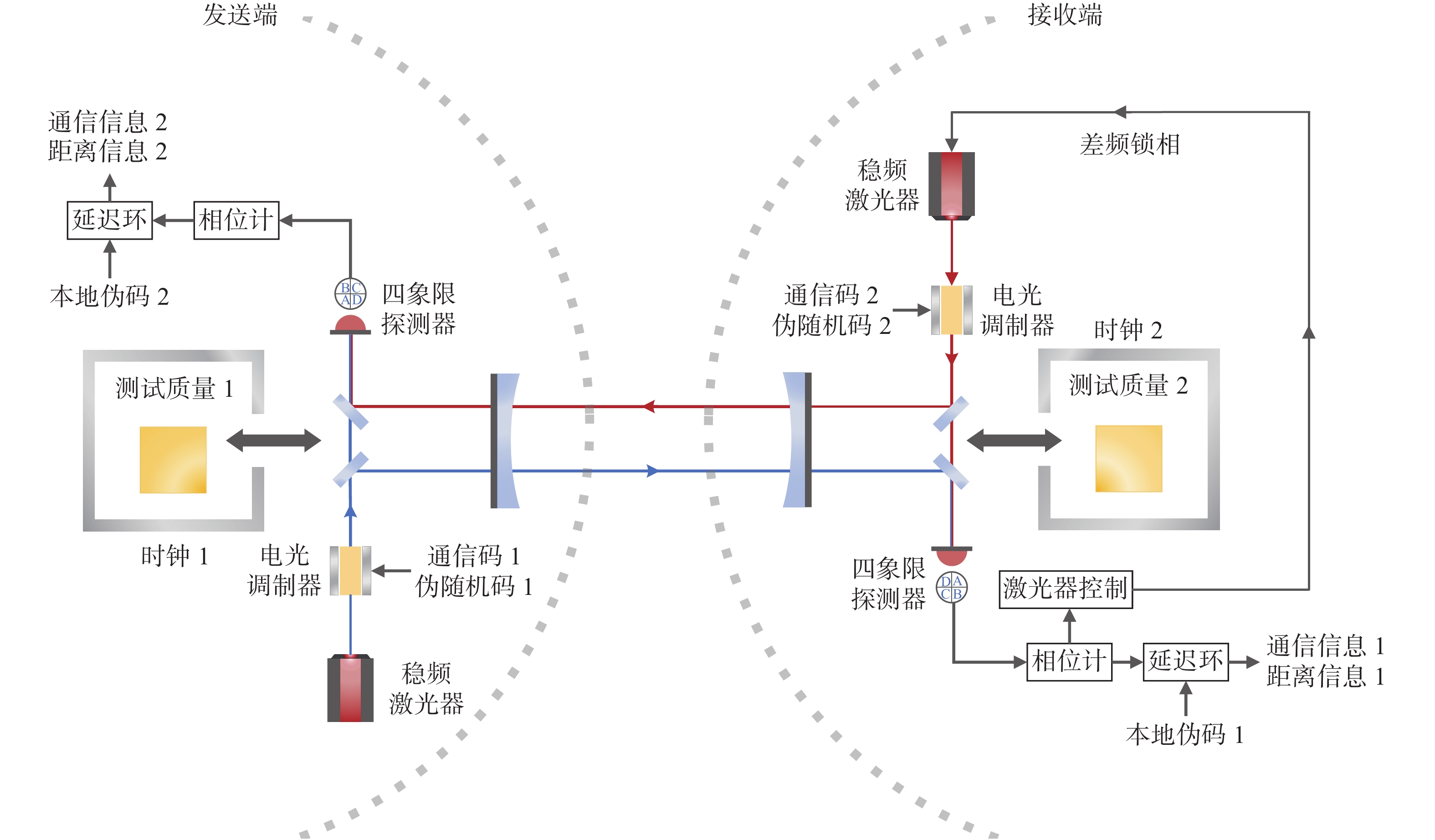
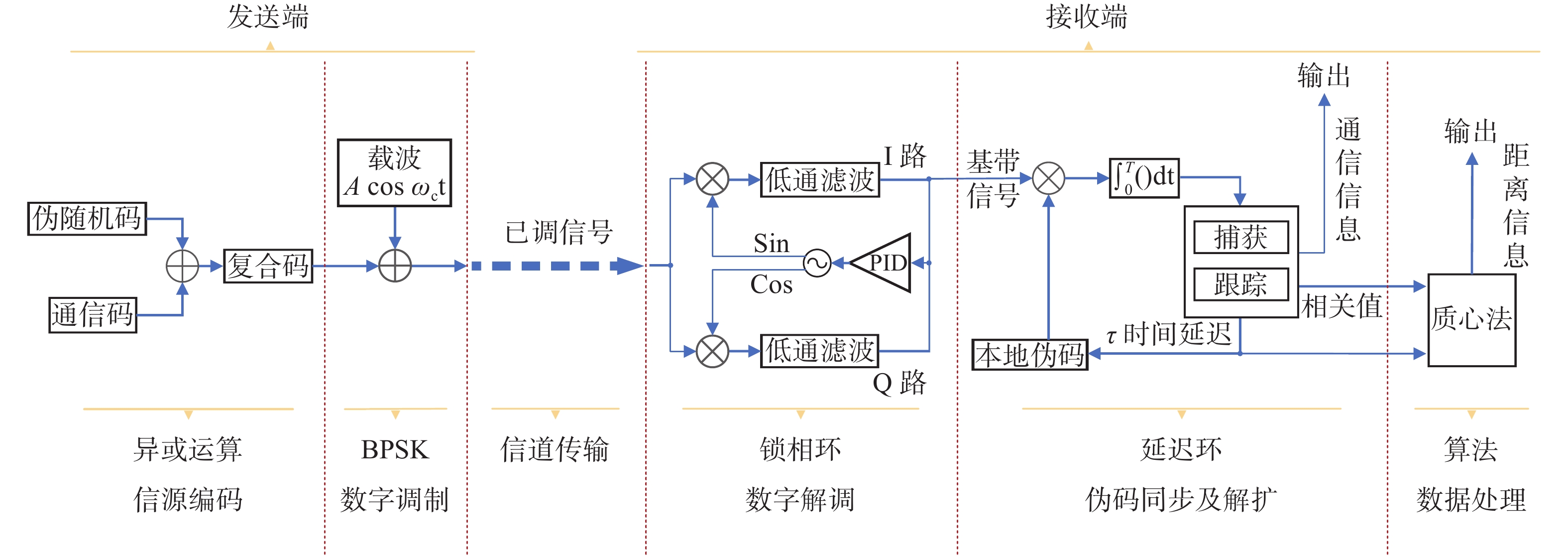
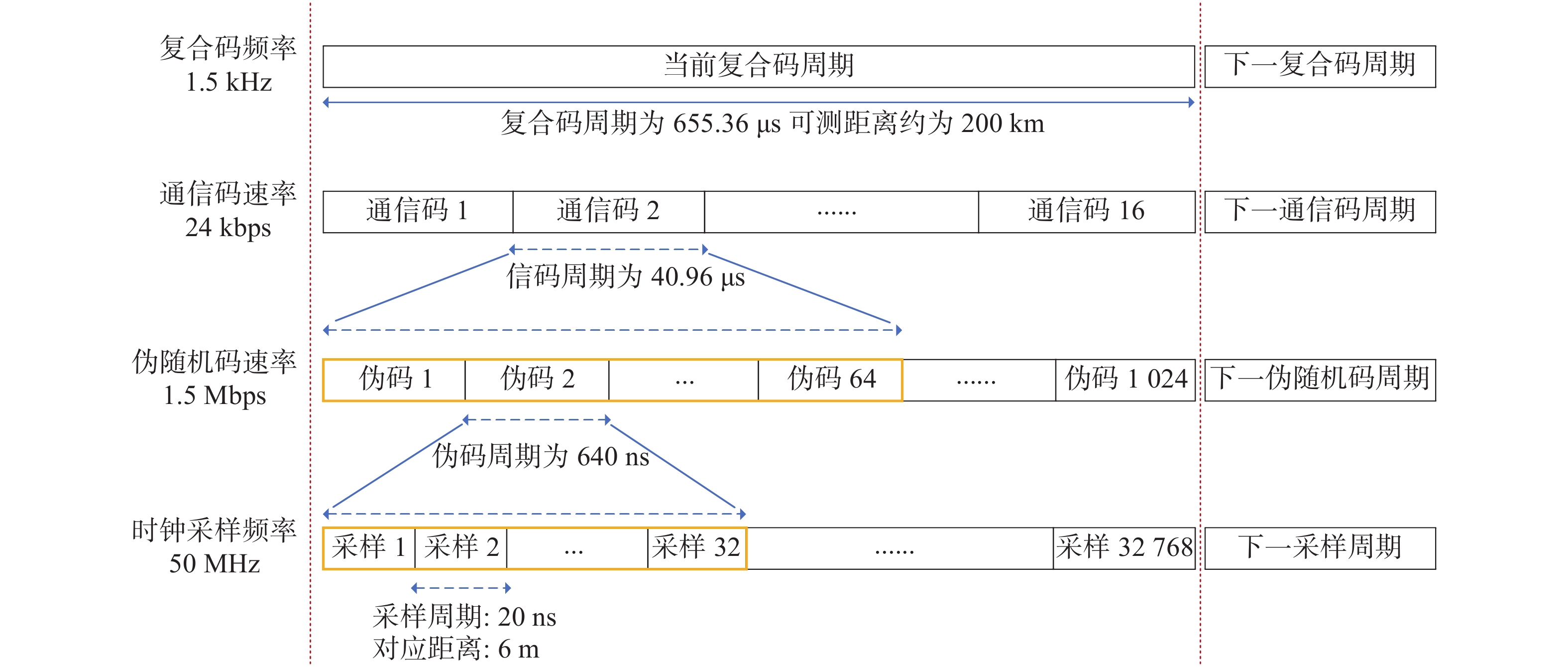
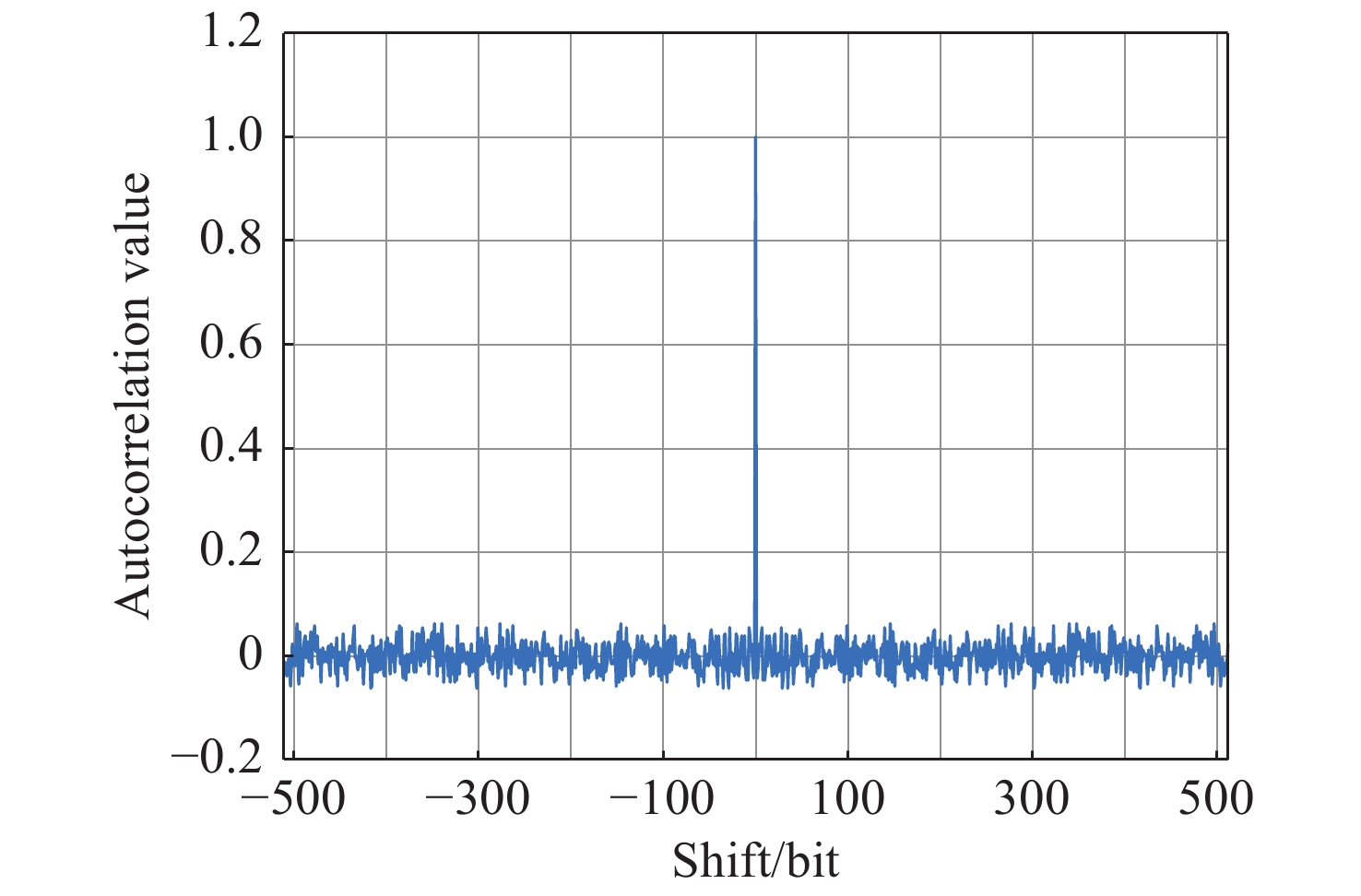
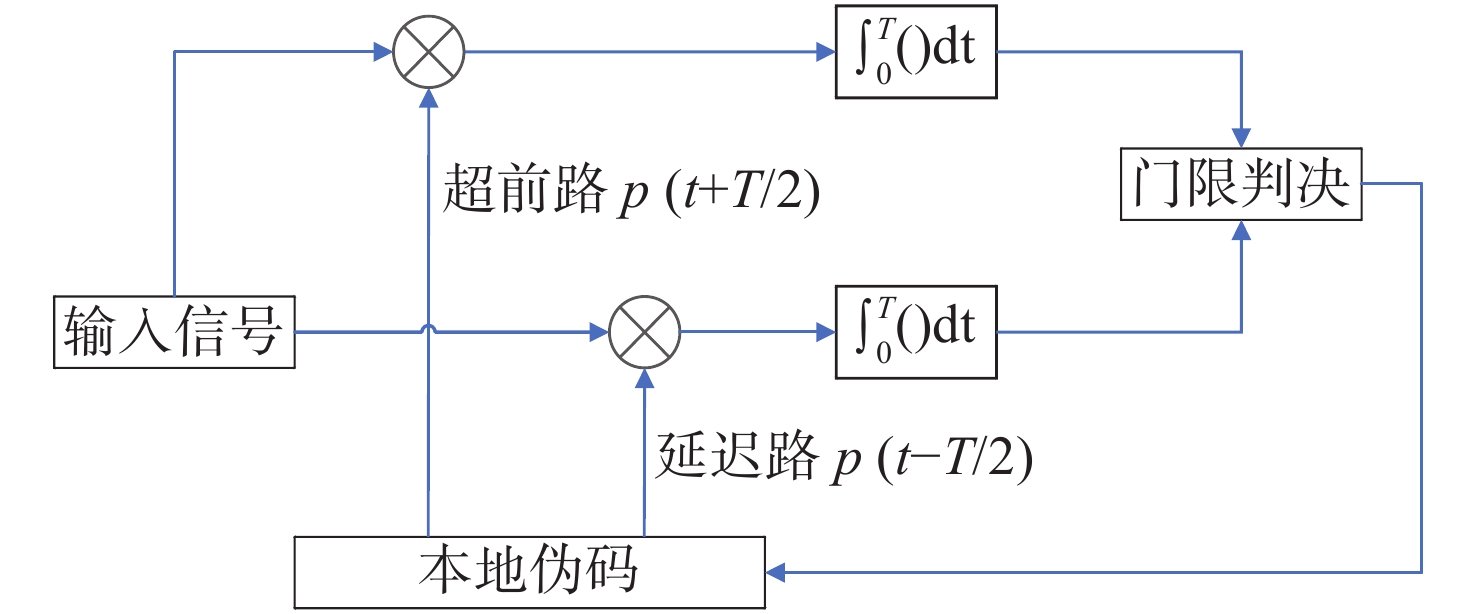
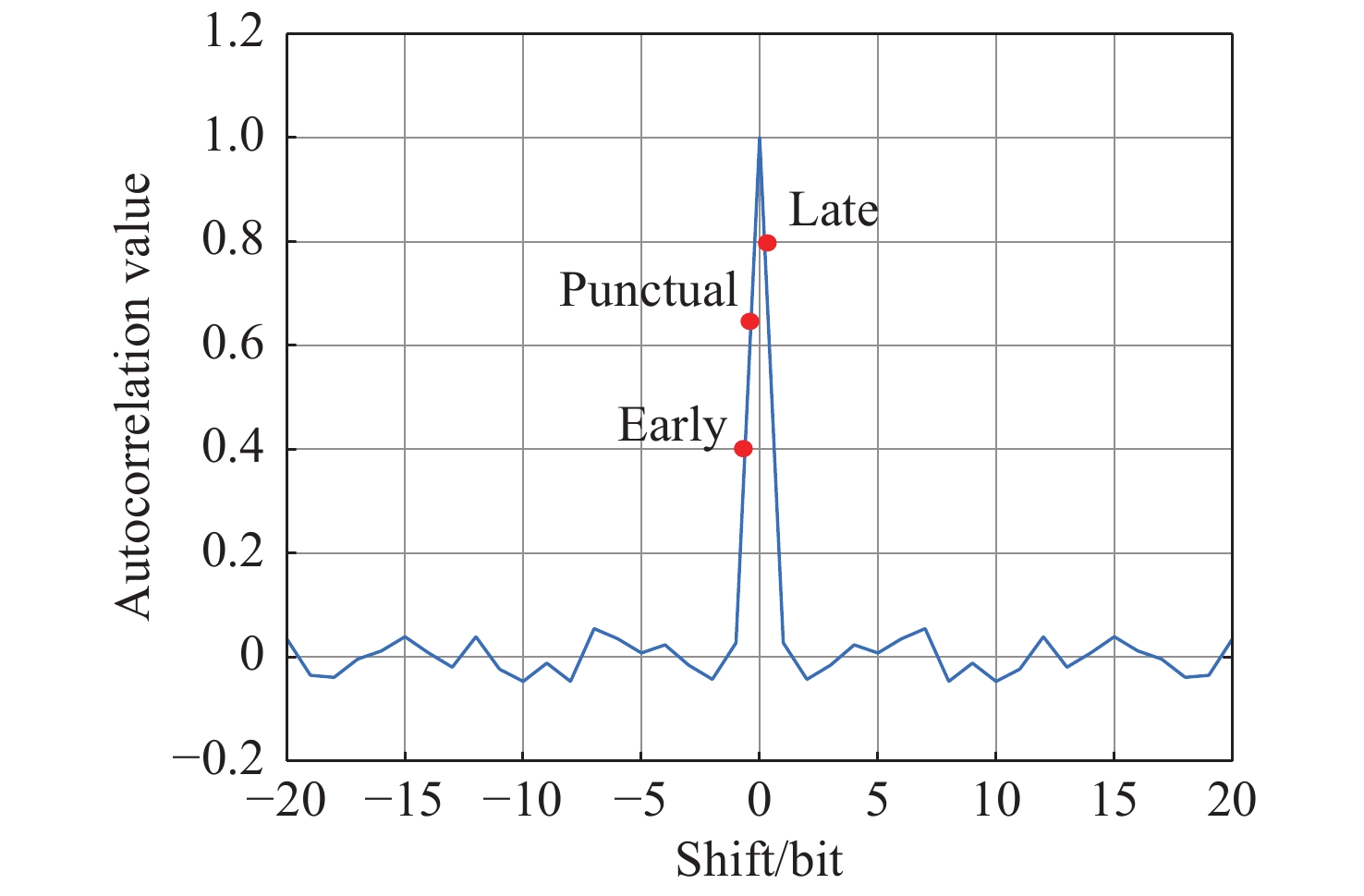
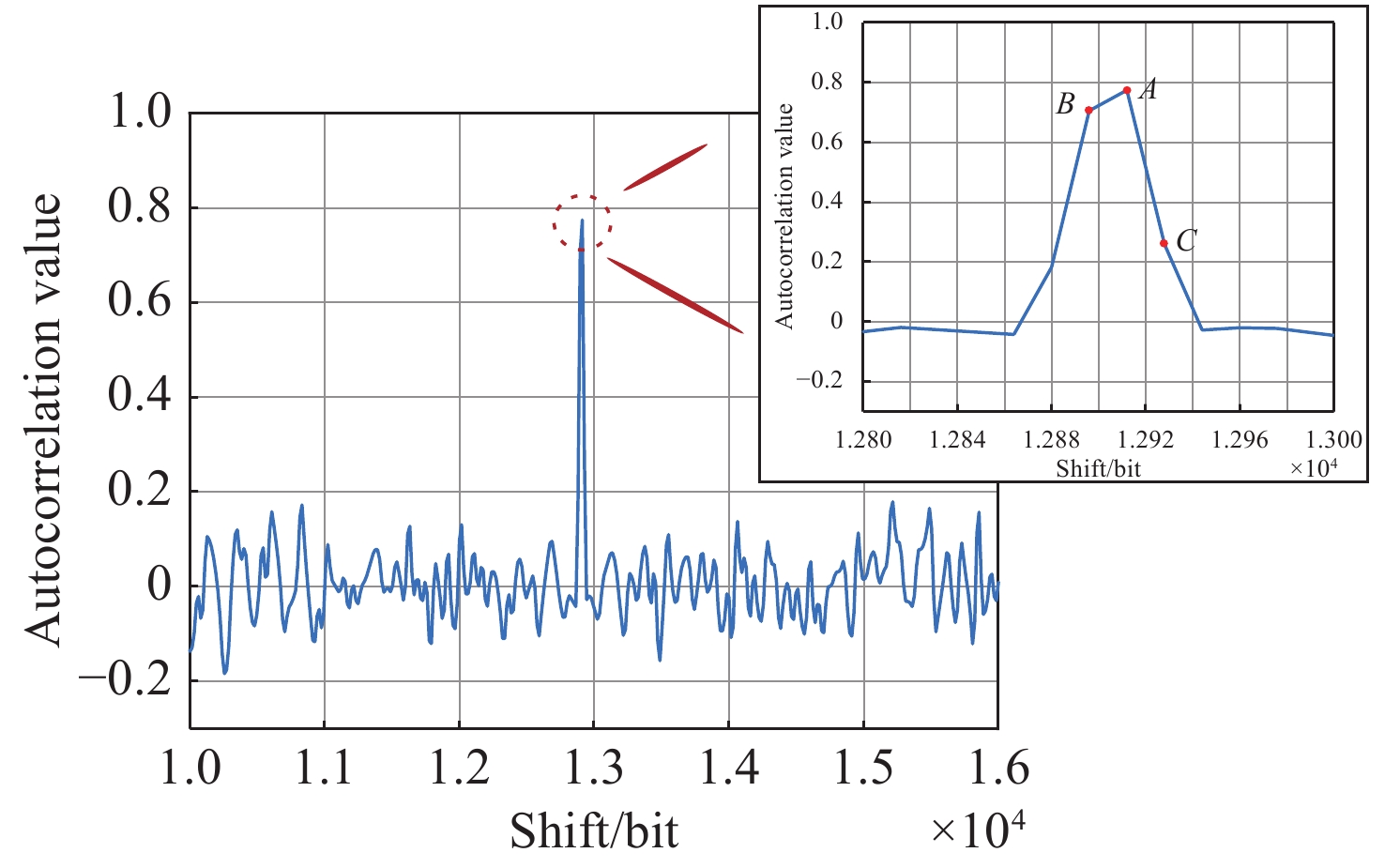
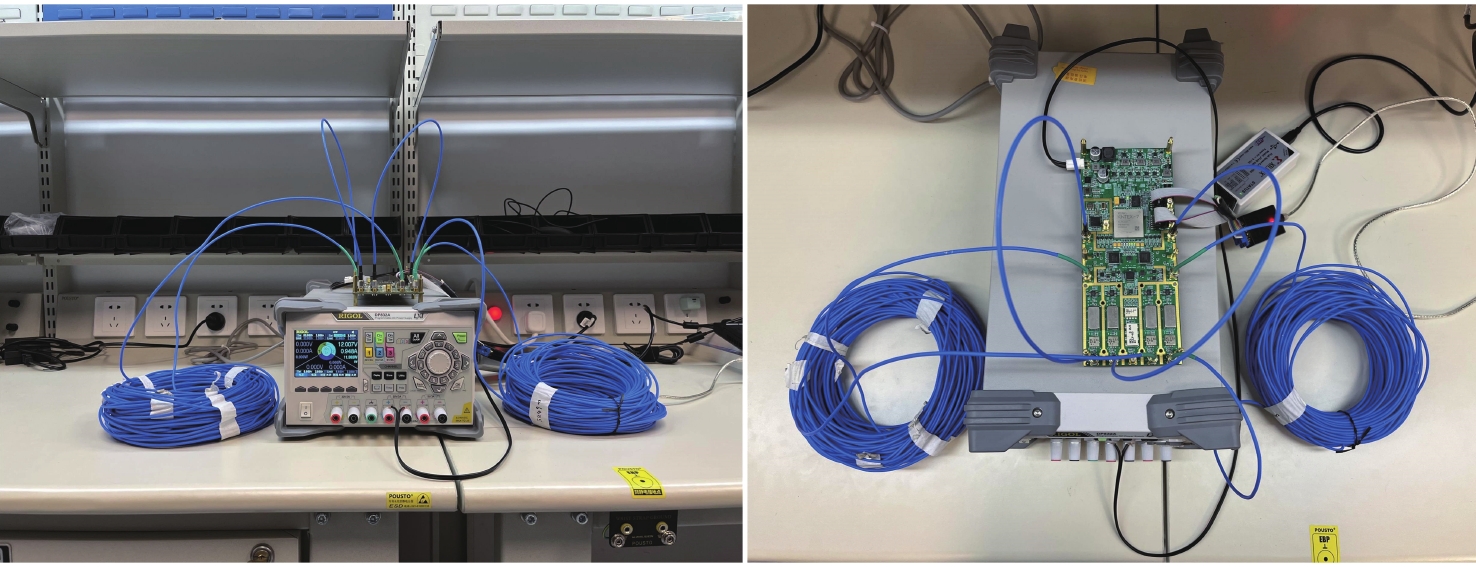
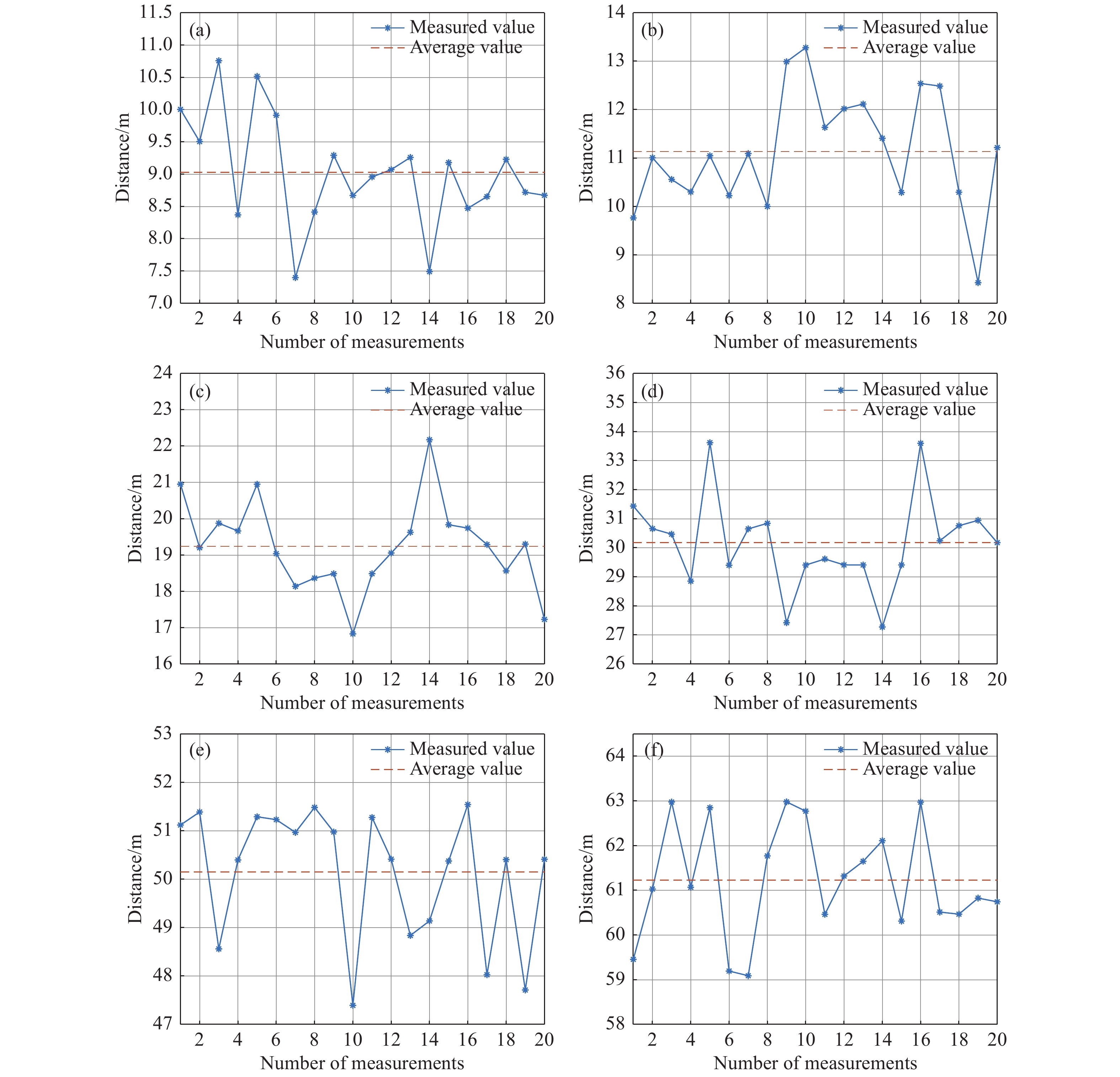
在空间引力波探测太极计划中,激光干涉测距系统是获取引力波信号的直接手段,为了消除激光频率不稳定性对其的影响,需利用时间延迟干涉技术降低噪声的干扰。时间延迟干涉是一种数据后处理方法,要实现该技术的数据构型,需对卫星臂长实现精确的绝对距离测量。本文从太极计划的需求分析出发,分别从信源编码设计、延迟环设计以及数据处理算法等方面介绍测距系统的设计方案。在信源编码中,文章通过分析m序列、gold序列、Weil码三种伪随机码的自、互相关性优劣以及长度选取上的灵活性,最终选择了Weil码并筛选出其自相关性最优的移位-截取组合,将其作为测距系统所用的伪随机码。同时,基于该测距系统,搭建了一套地面电子学验证实验装置,以模拟信号传输的物理过程并验证系统性能。实验主体装置采用一块基于Xilinx公司K7芯片的自研FPGA板卡用以模拟卫星通信测距过程以及实现锁相环、延迟环等功能。实验将24.4 kbps的16位信息码与1.5625 Mbps的1024位Weil码进行BPSK调制,采样频率为50 MHz,通过10~60 m的射频同轴电缆进行传输后,使用质心法对采集数据进行优化,随后测定该距离。实验结果表明:在60 m范围内,测距精度优于1.6 m。实验证明了测距系统原理及设计的可行性,为下一步的光学系统验证奠定了技术基础。


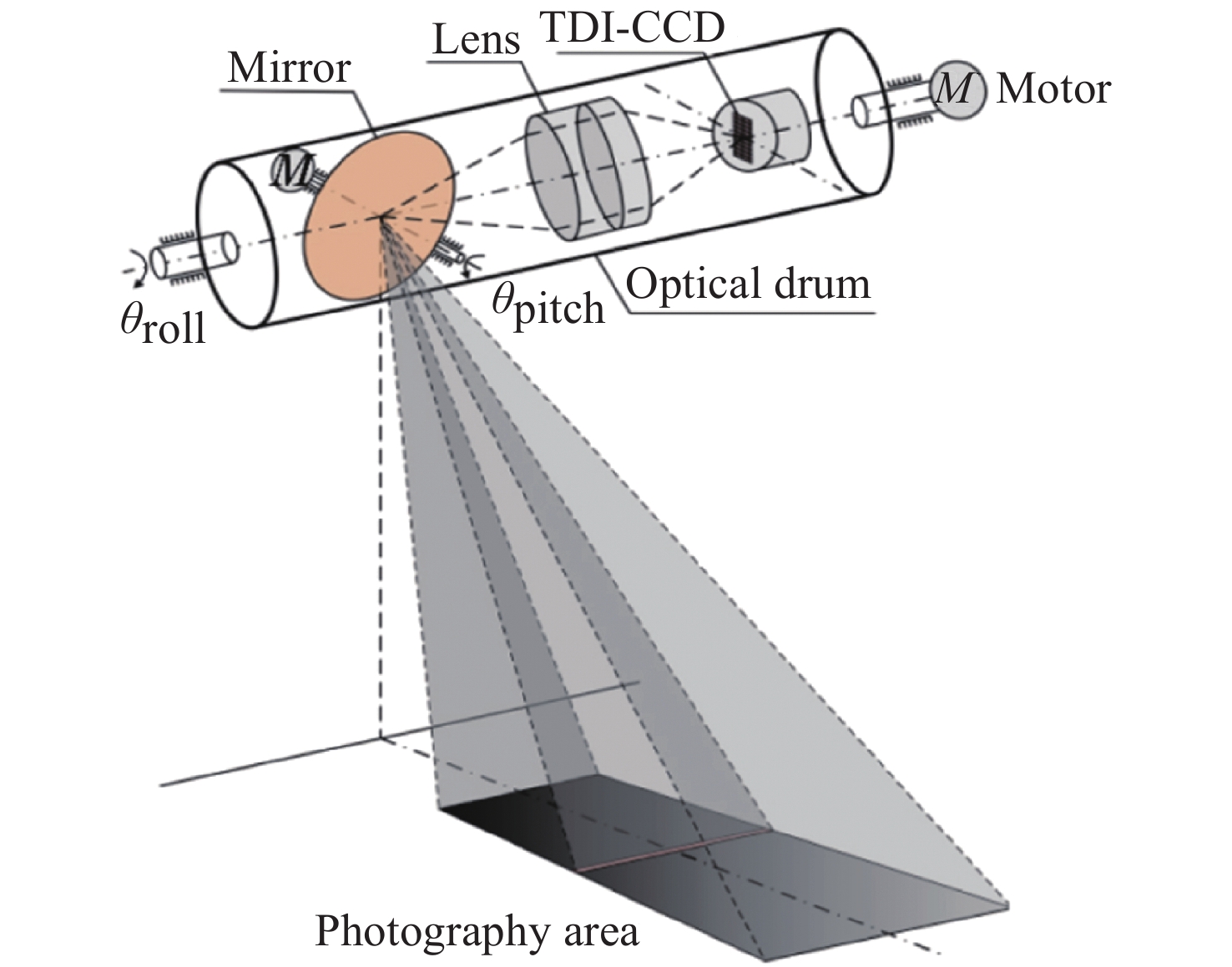
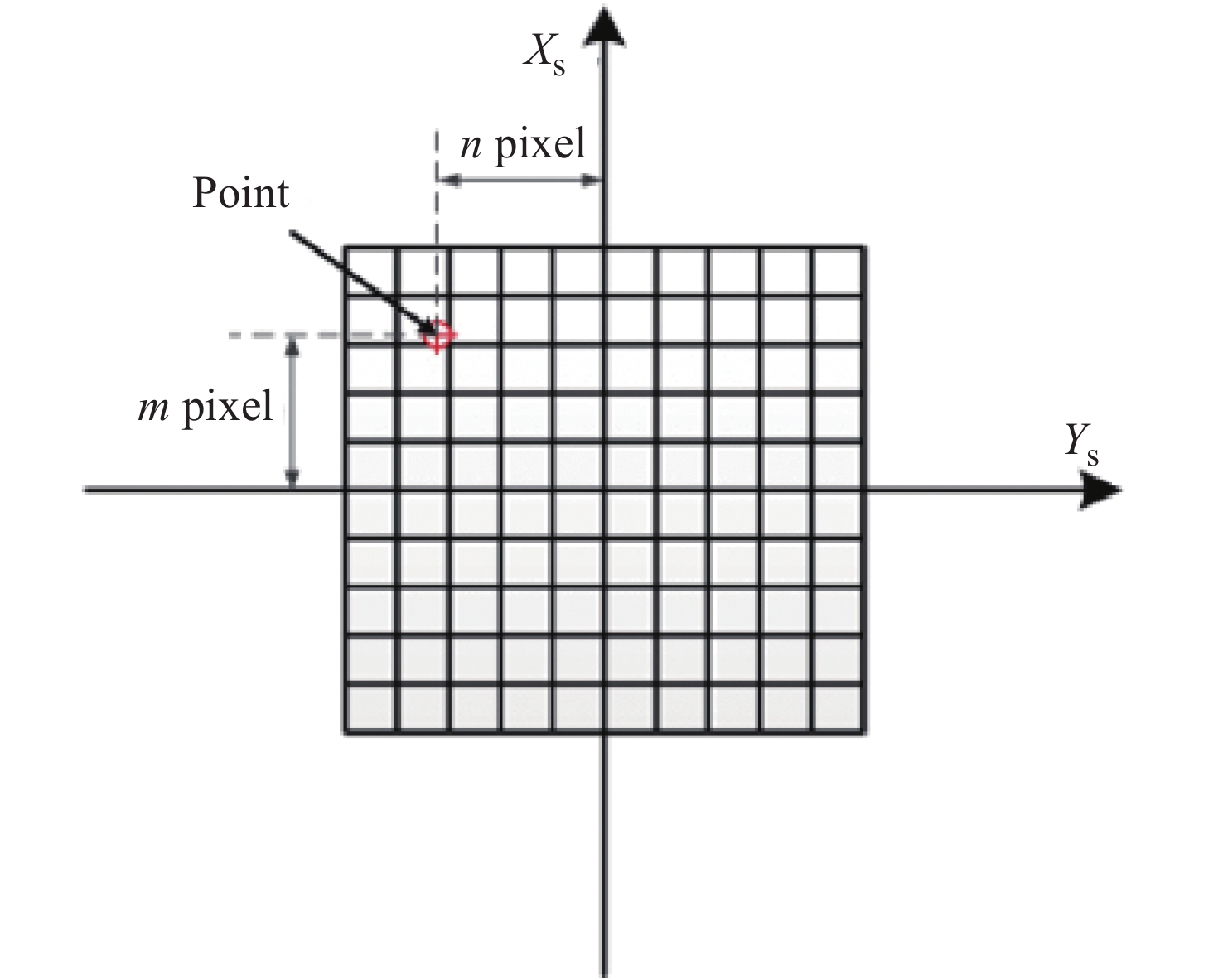
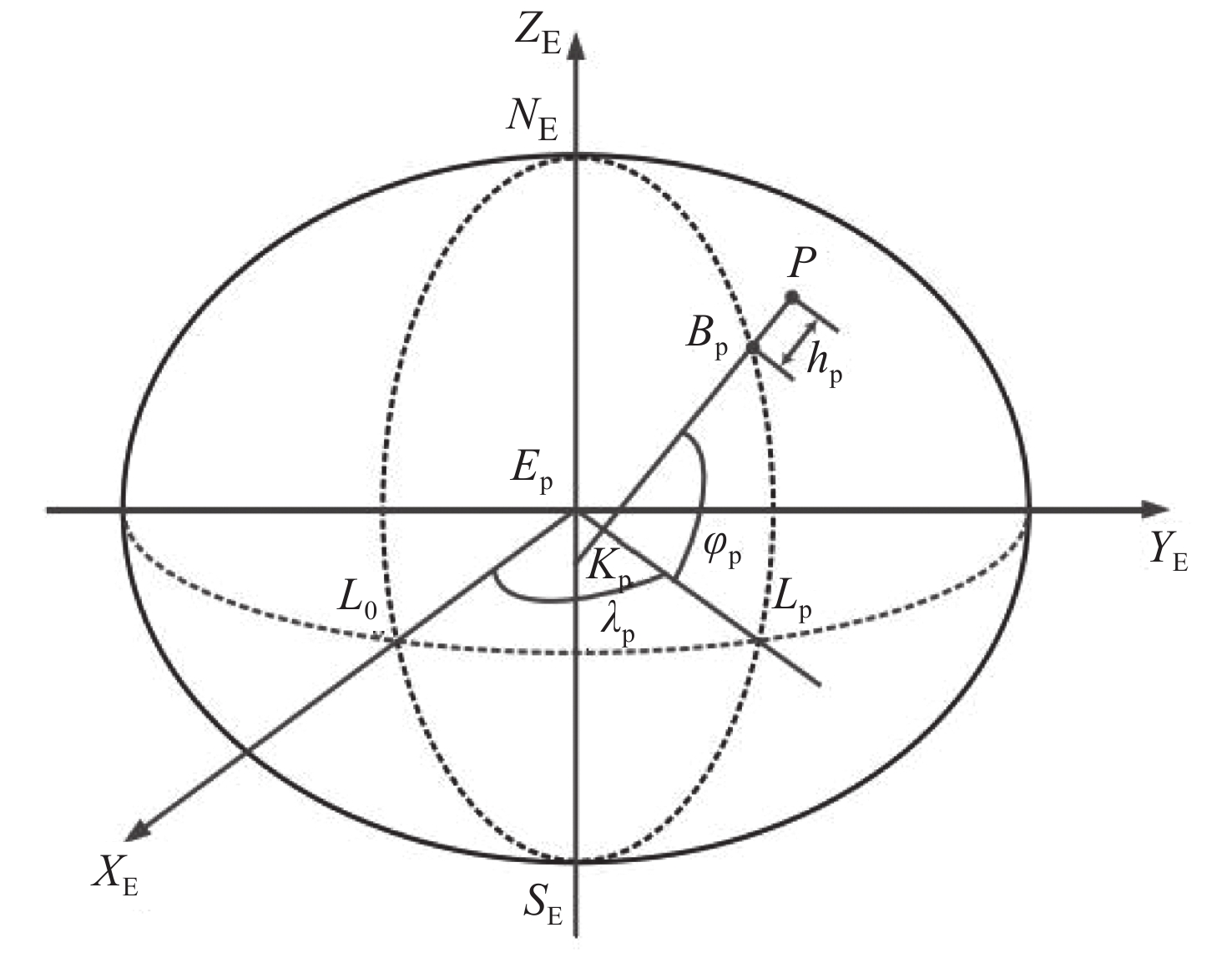
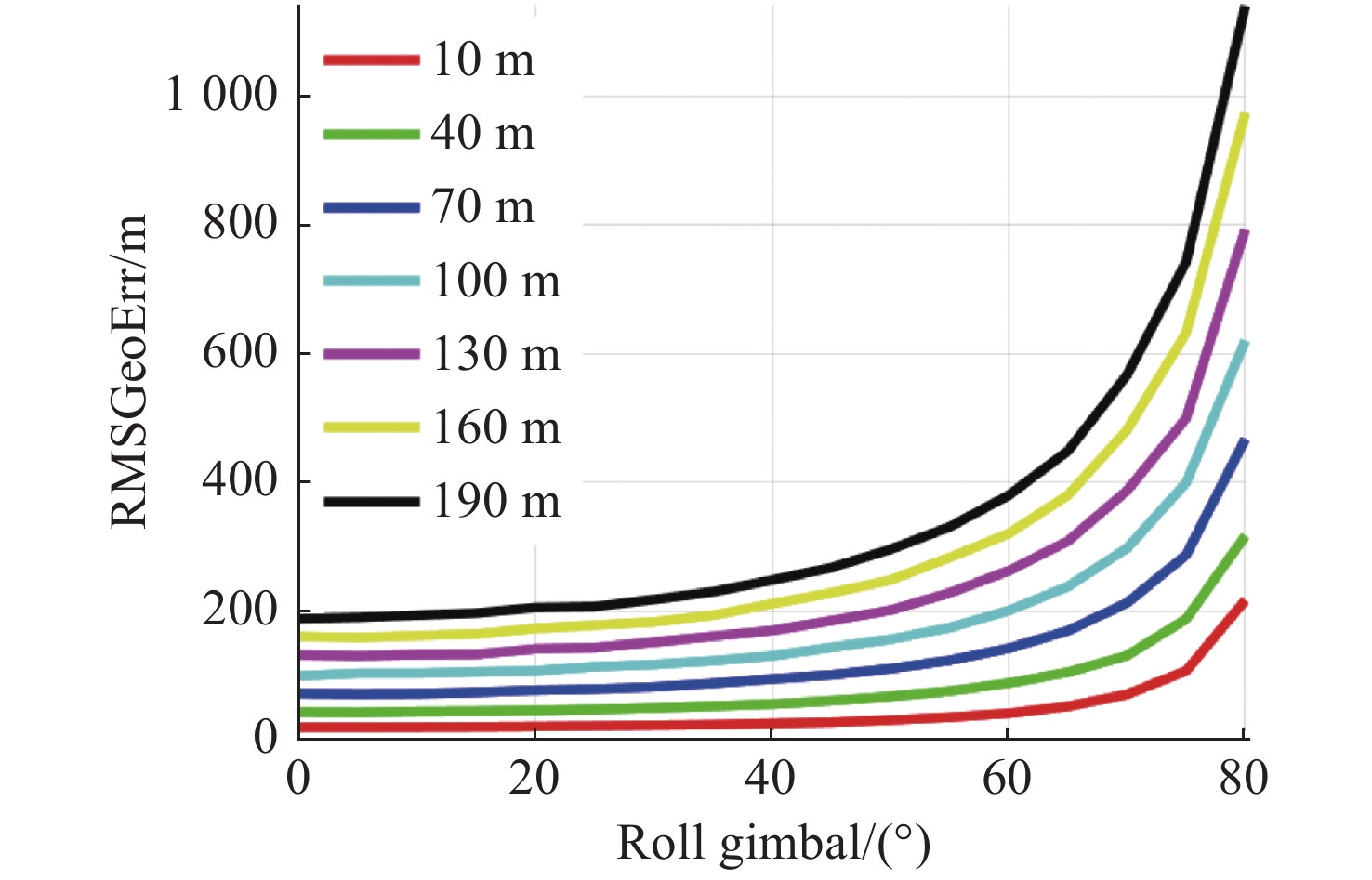
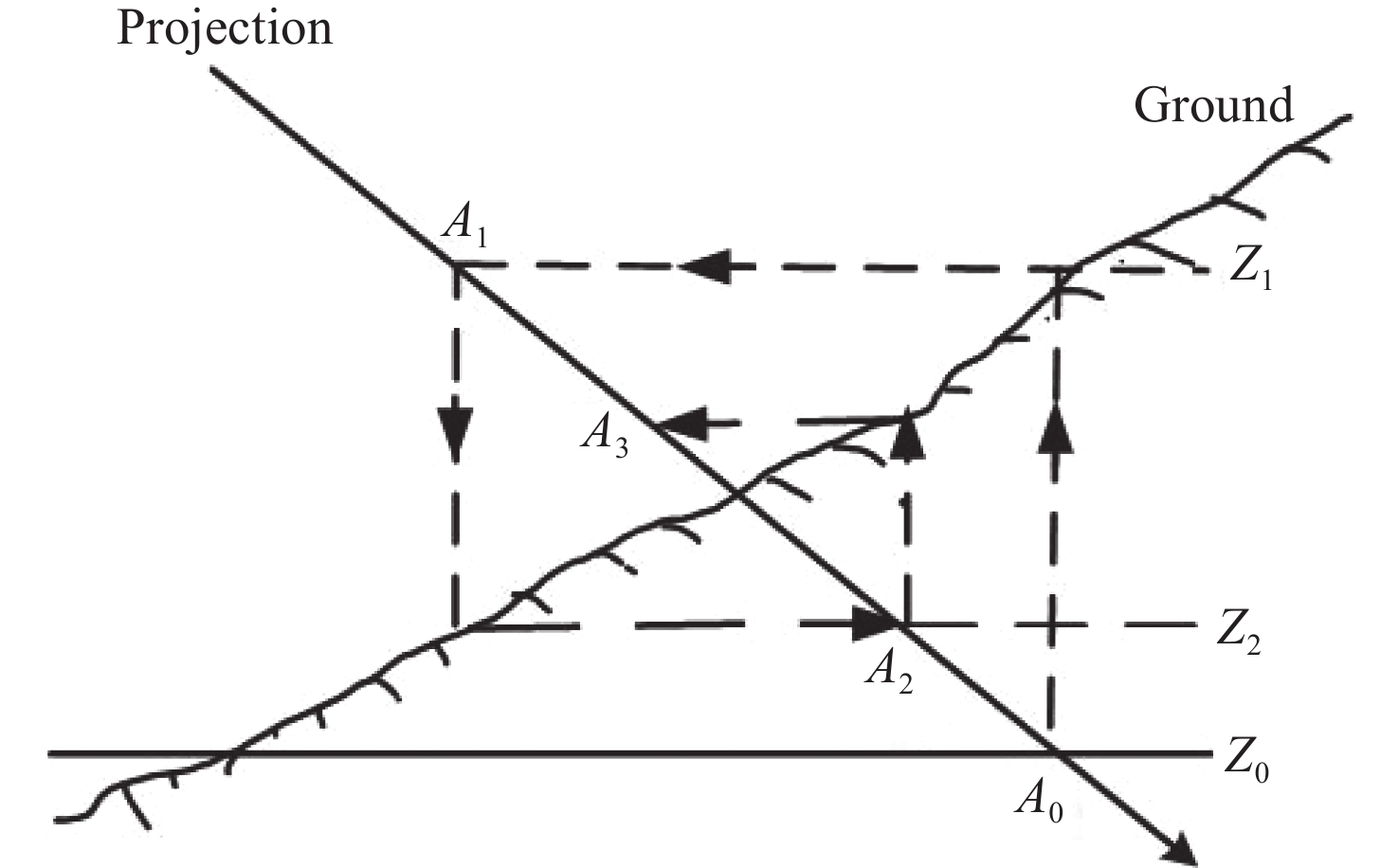
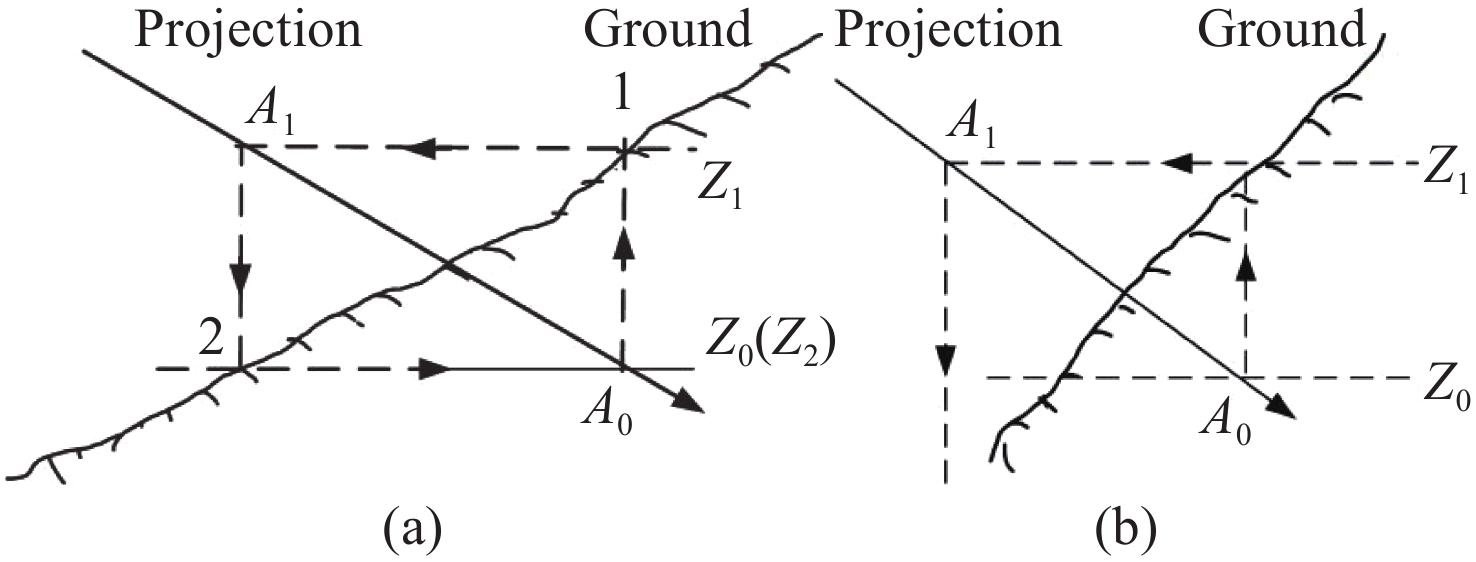
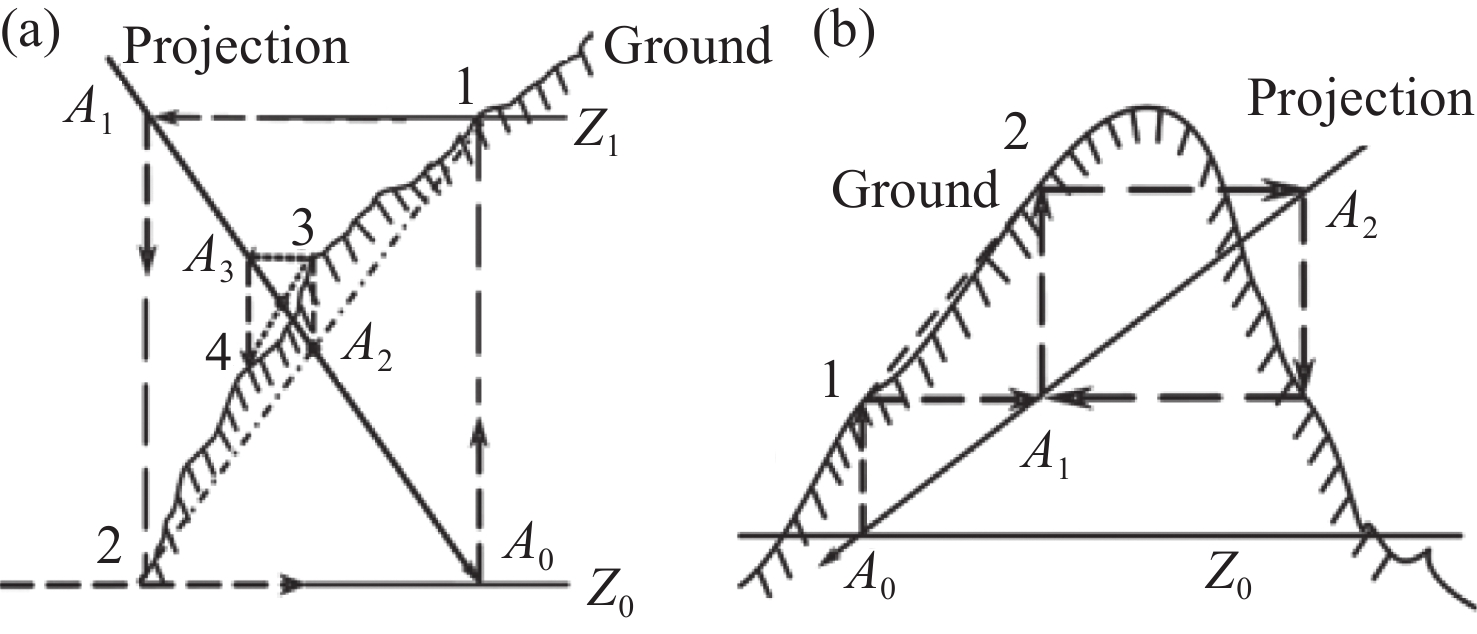
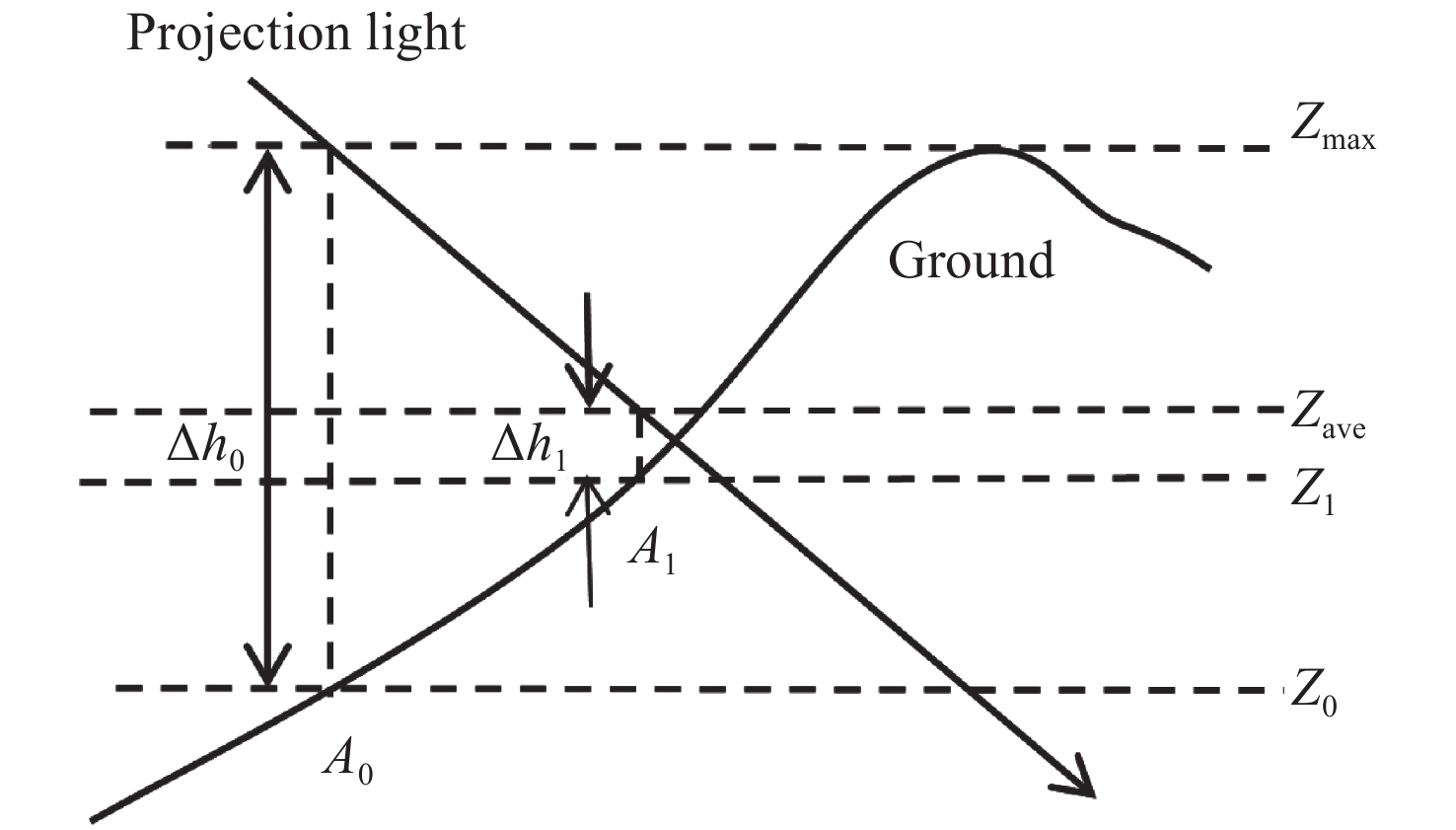
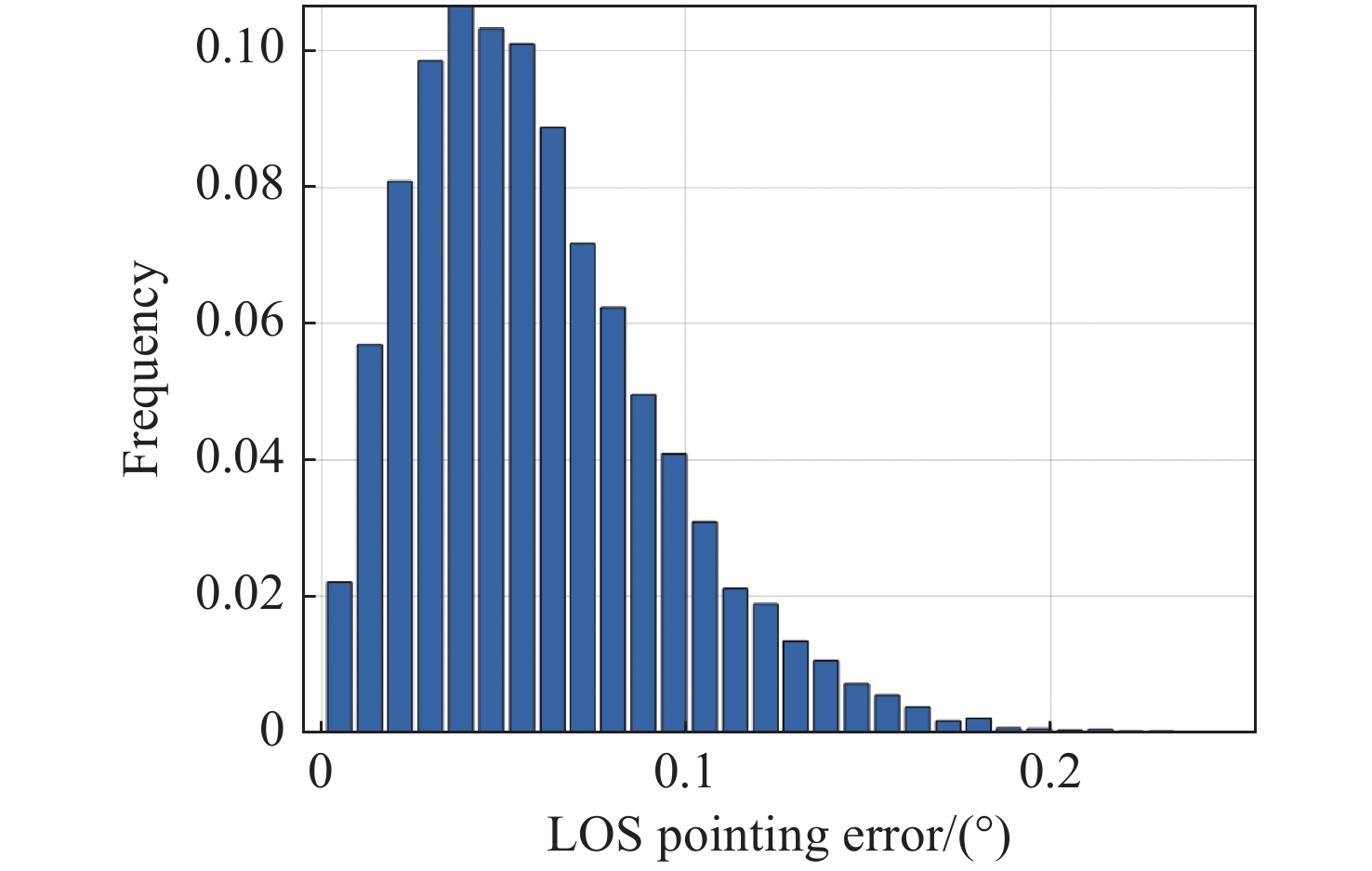
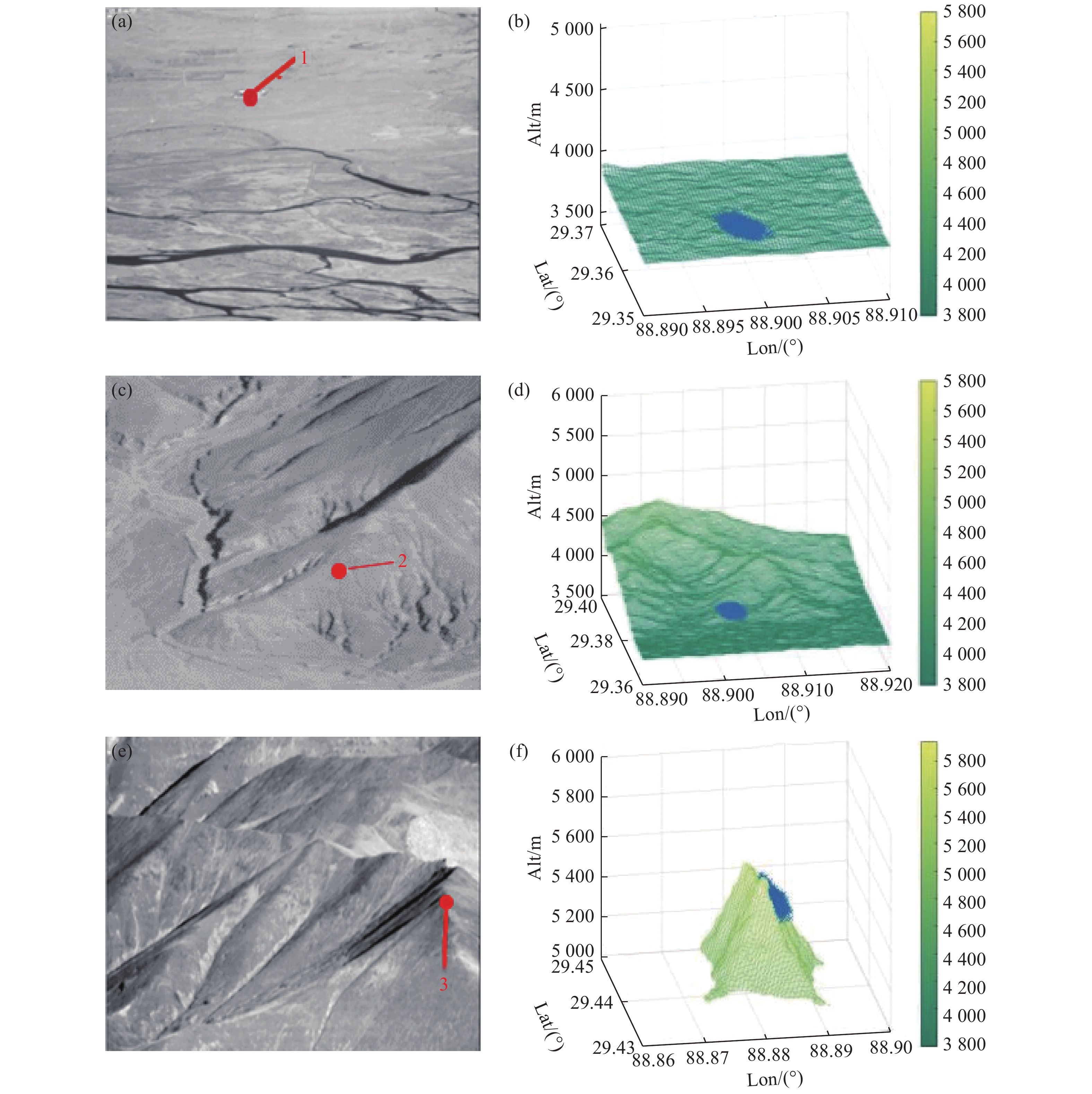
在大倾角航空相机对地面目标定位过程中,借助数字高程模型(DEM)可有效解决地球椭球模型定位存在的大地高误差影响。为获取地面坐标的准确信息特别是高程信息,首先,根据载机的位置姿态信息以及航空相机的框架角等信息利用齐次坐标变换求解出成像系统视轴在地理坐标系下的指向,再利用数字高程模型确定目标点的坐标。针对成像过程中目标点高程计算繁琐、容易不迭代等问题,提出了一种对目标高程值进行快速迭代的方法。通过对目标区域高程进行折半查找处理,计算该处视轴光线高程与地面高程差值。继续计算该高程差中值并继续迭代,直到小于一定阈值。最后使用蒙特卡洛分析法对整个成像过程存在的误差项进行分析。实验结果表明:采用快速迭代法进行计算,当收敛阈值为十分之一DEM网格精度时,迭代效率提升45.5%,收敛速度大大提高;且通过数字高程模型计算,在飞行高度为15409 m,相机框架角大于74°时,对于山地区域目标的圆概率误差小于200 m,可以满足实际工程需要。



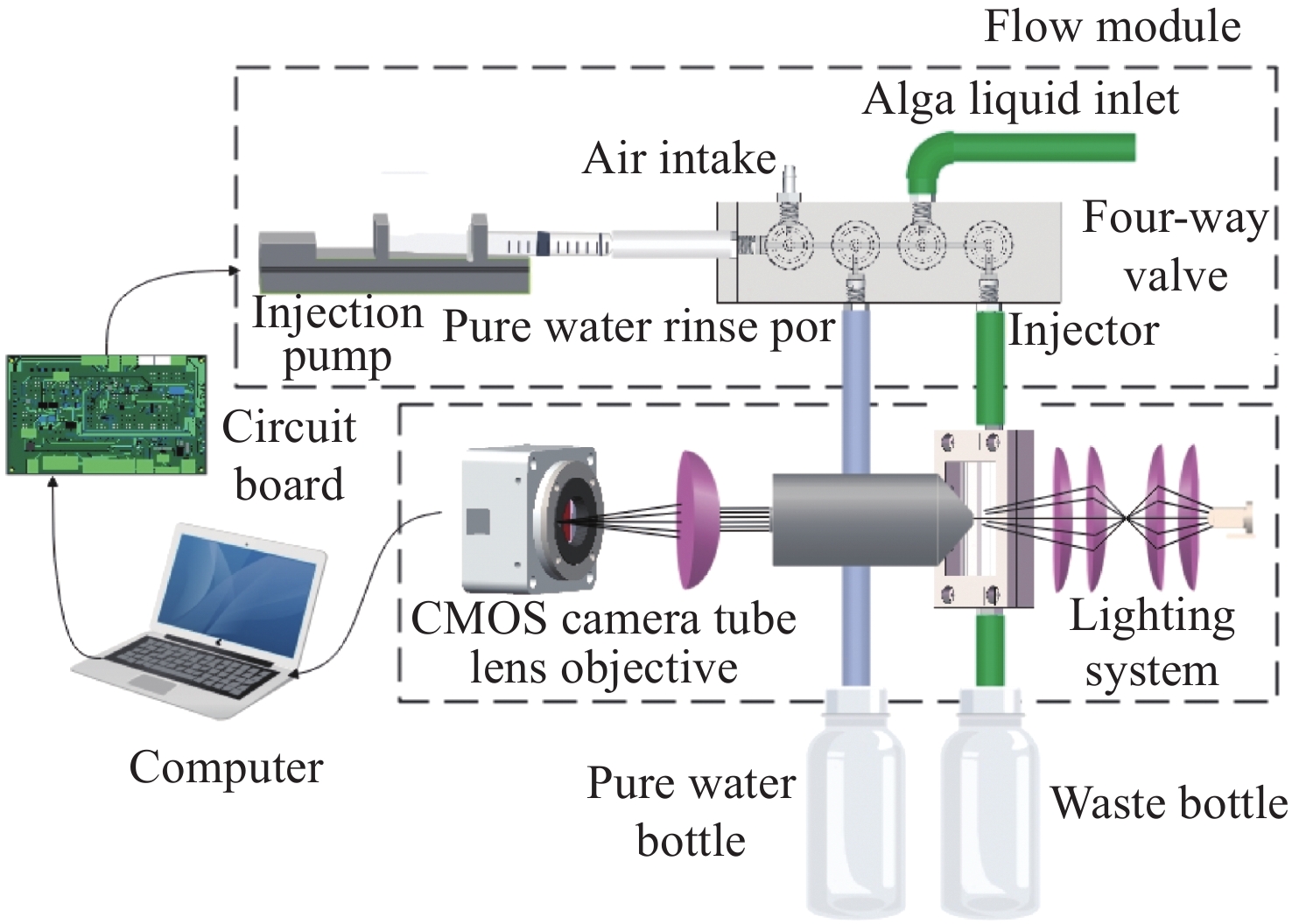
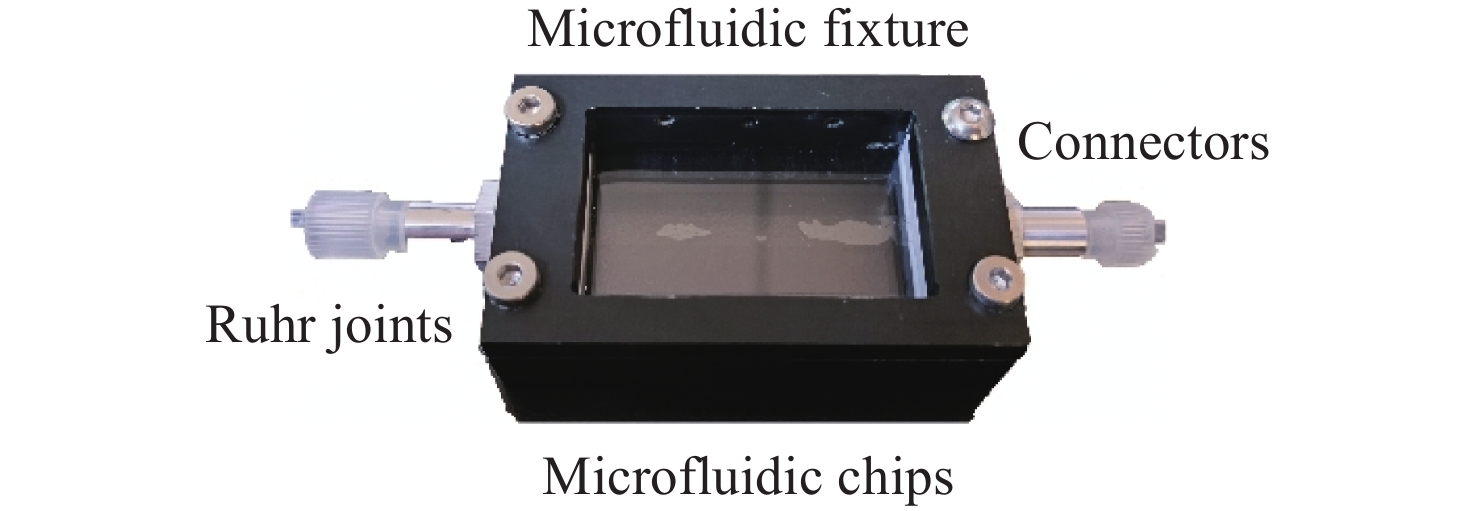
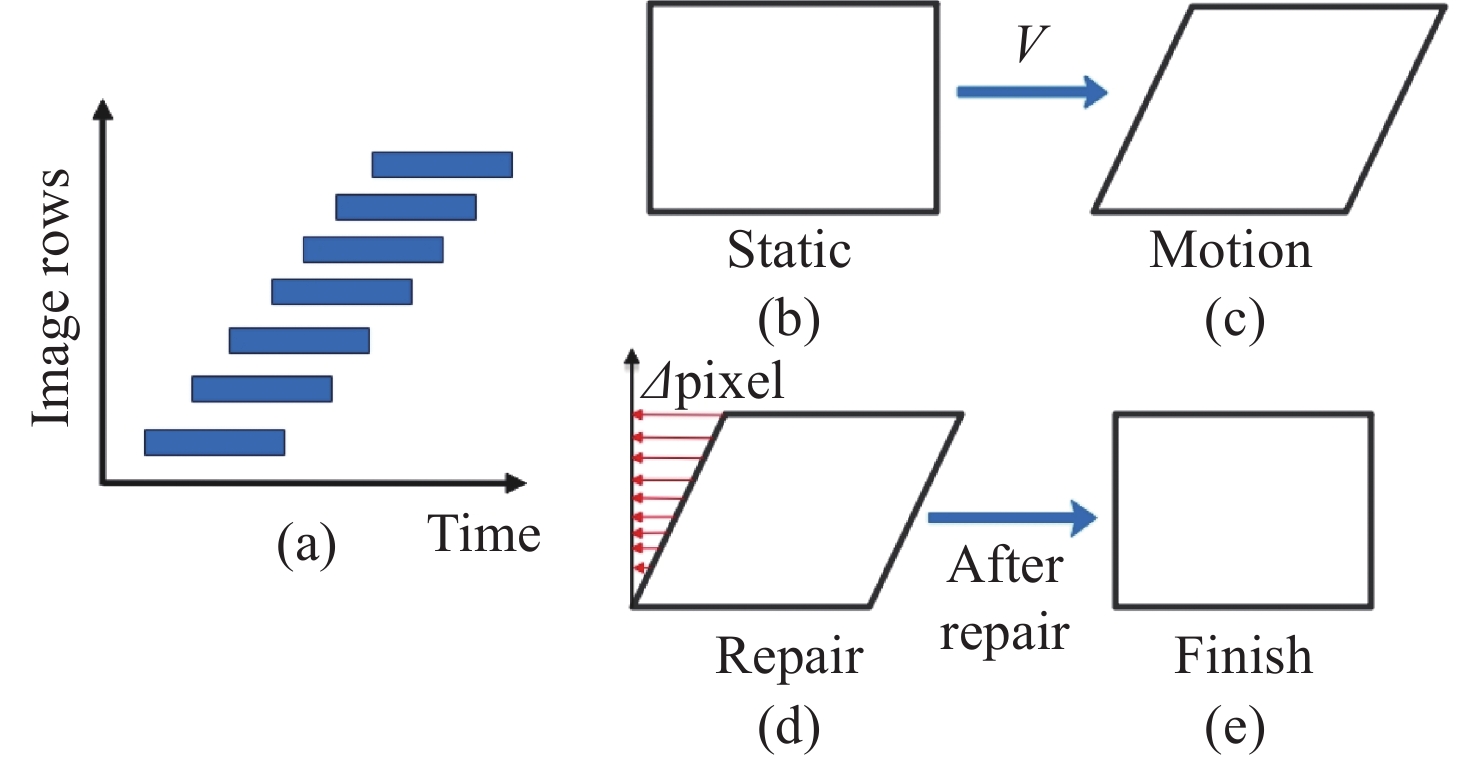
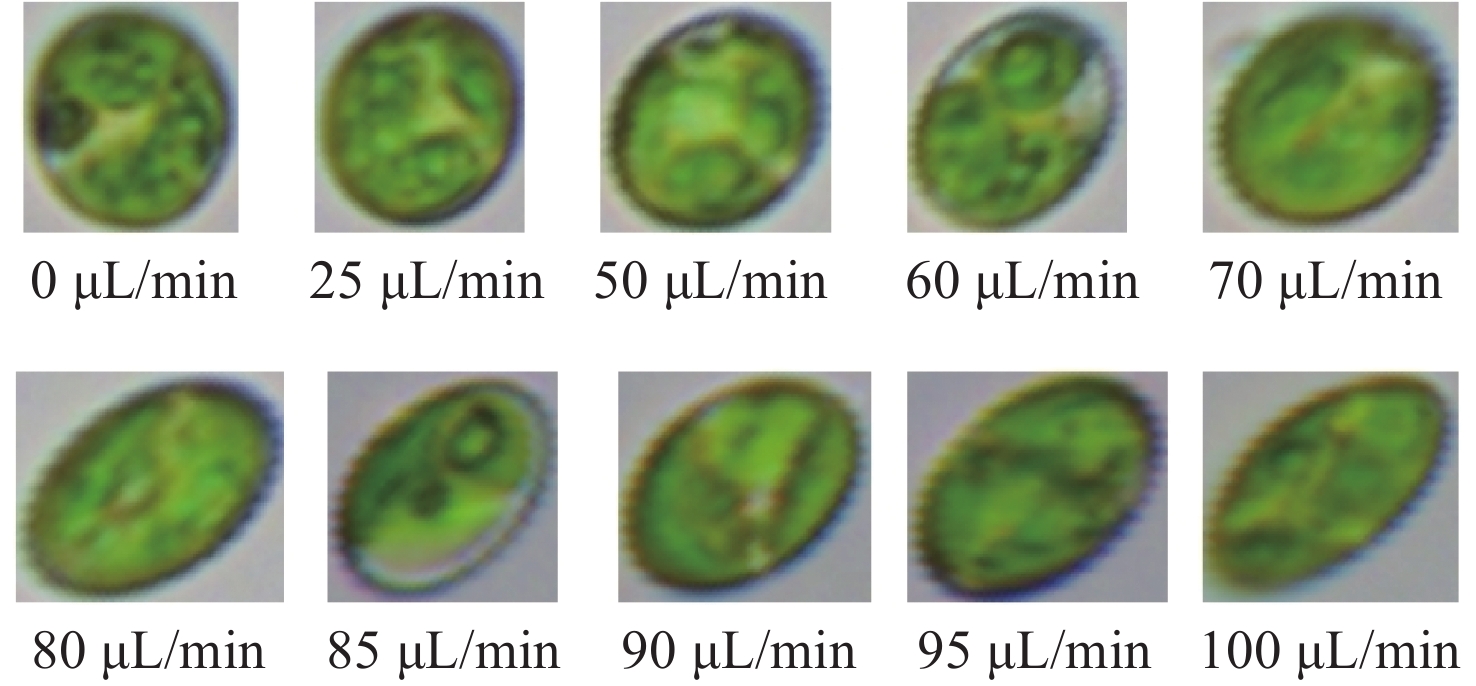
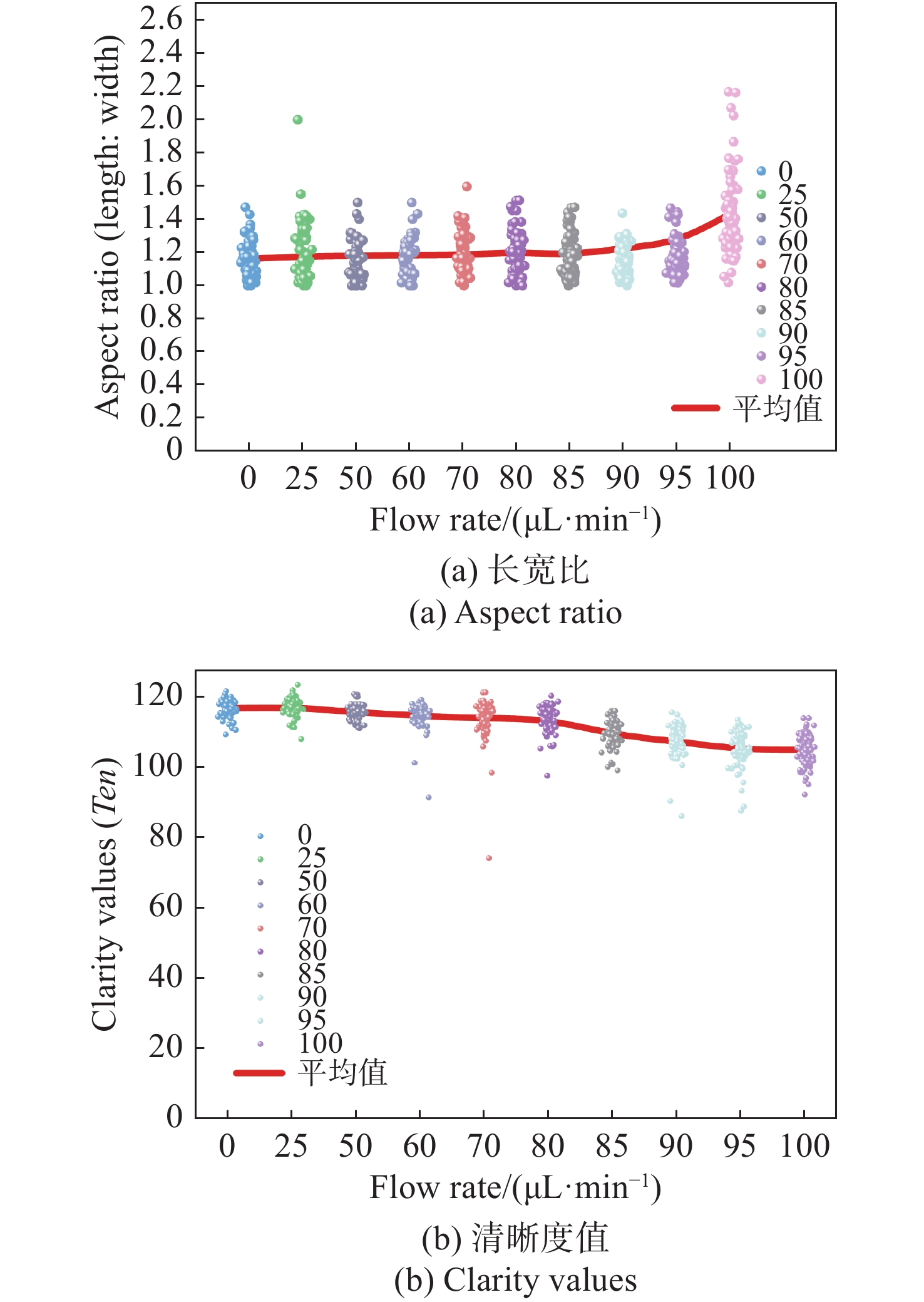
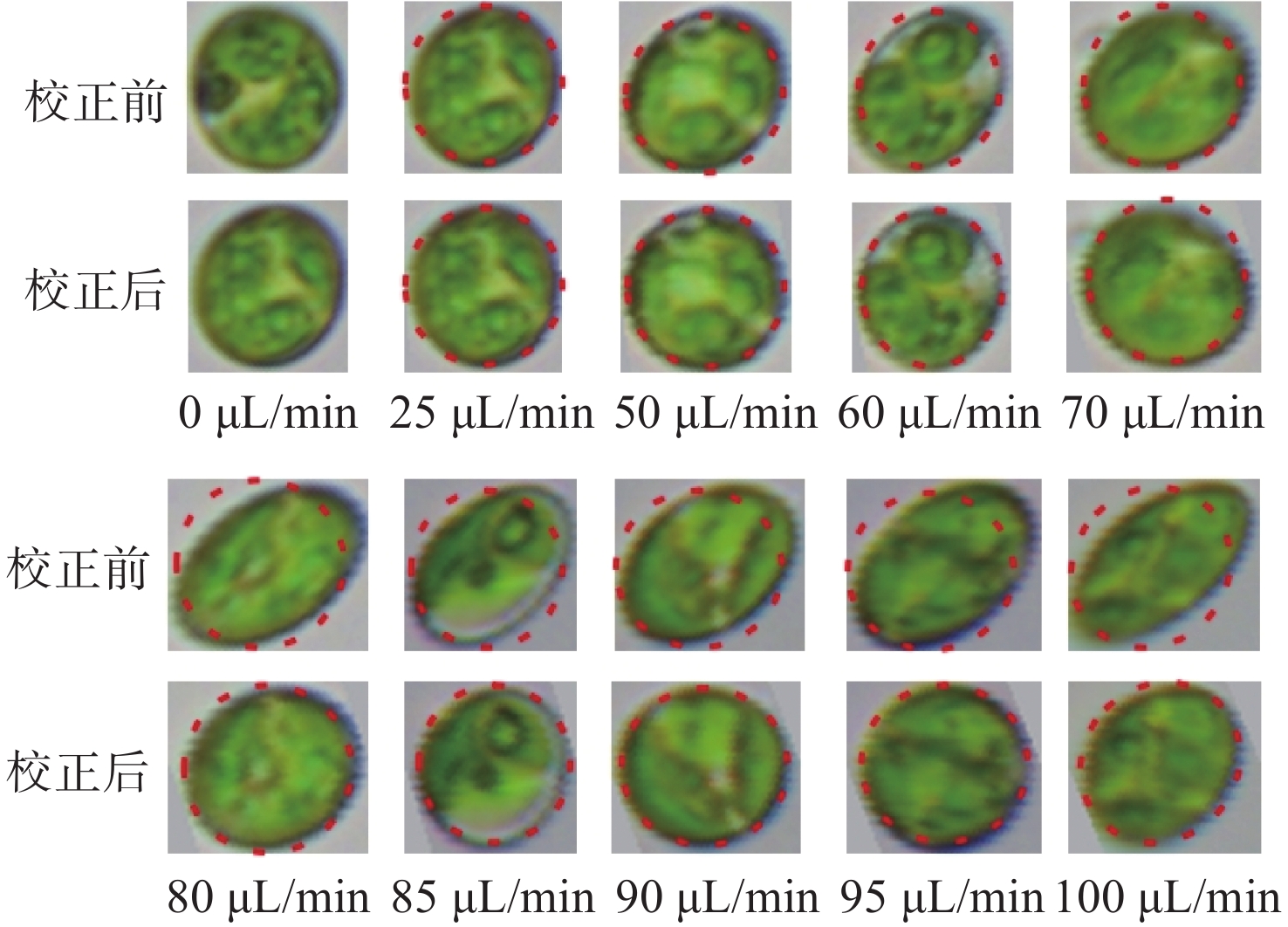
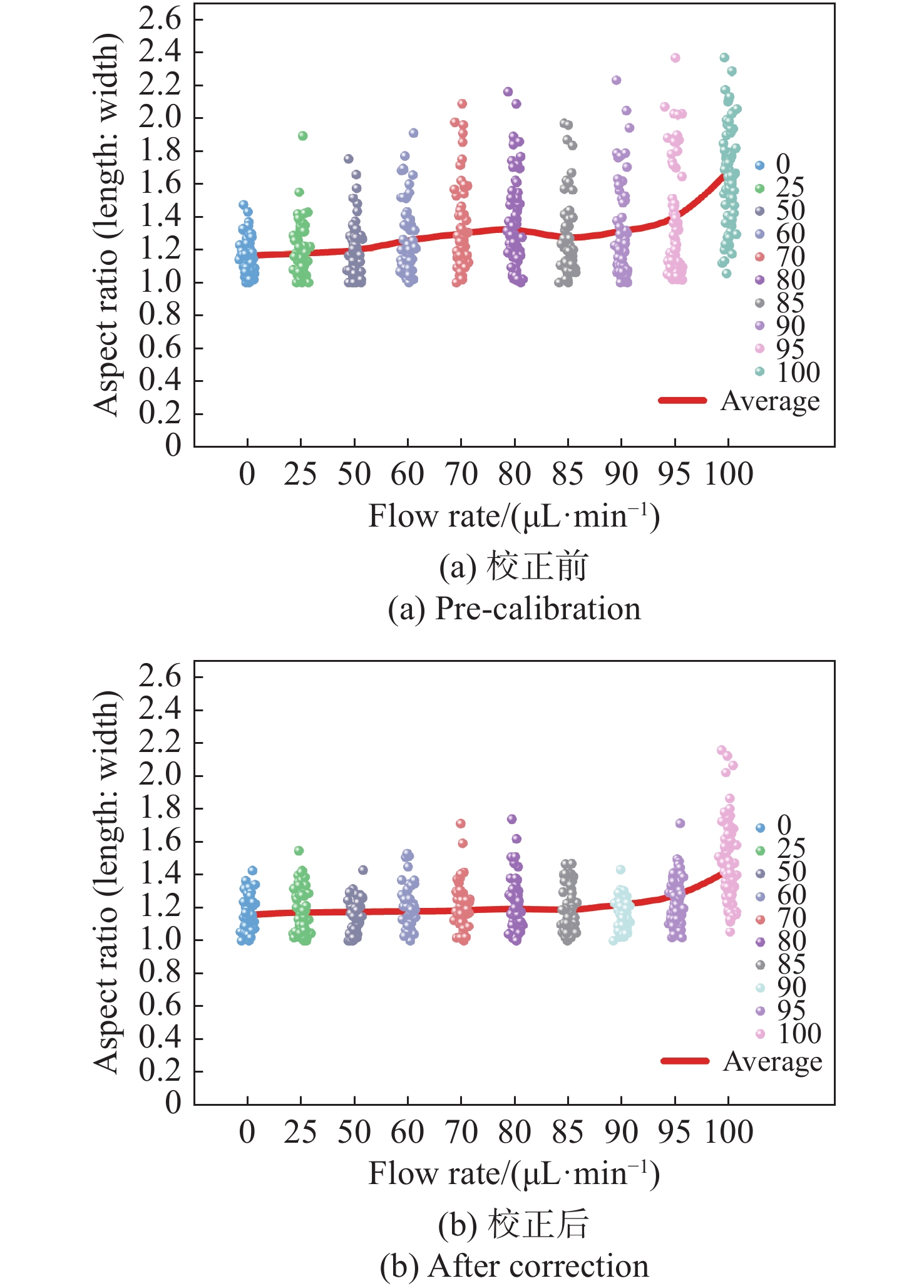
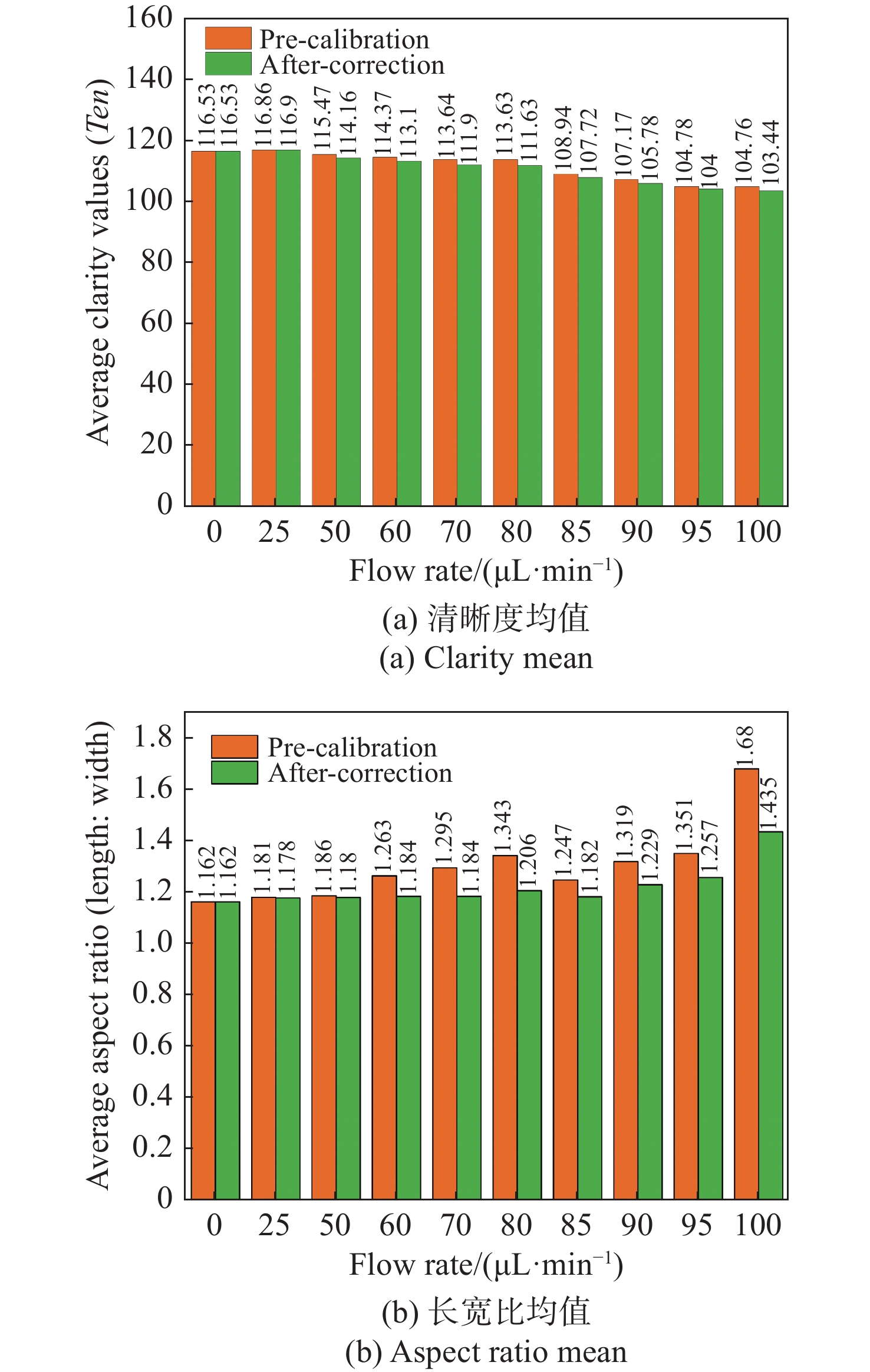
流式细胞显微图像分析法是水体浮游藻类自动鉴别的重要发展方向,快速进样条件下细胞显微图像将产生形变,影响浮游藻类自动鉴别准确率。本文基于搭建的浮游藻类微流控-显微成像实验系统,通过对不同进样流速下藻类细胞显微形变和图像清晰度的分析,研究了流速对显微成像形变的影响规律。分析基于卷帘快门拍摄运动物体产生形变原理,提出了单向偏移像素的图像形变校正方法,并与藻类细胞静态条件下获取的图像进行了对比分析。实验结果表明:静态条件下,湖生卵囊藻细胞的图像长宽比及清晰度均值分别为1.16和116.53;动态进样过程中,随着流速增大细胞图像形变(长宽比)逐渐增大、清晰度降低;95 µL/min进样流速下,校正前后细胞图像长宽比均值分别为1.35和1.26,形变离散程度由校正前的0.33降至0.1,与静态细胞形态接近且校正前后图像清晰度基本不变。本文研究结果为提升水体浮游藻类细胞自动鉴别准确率提供了依据。

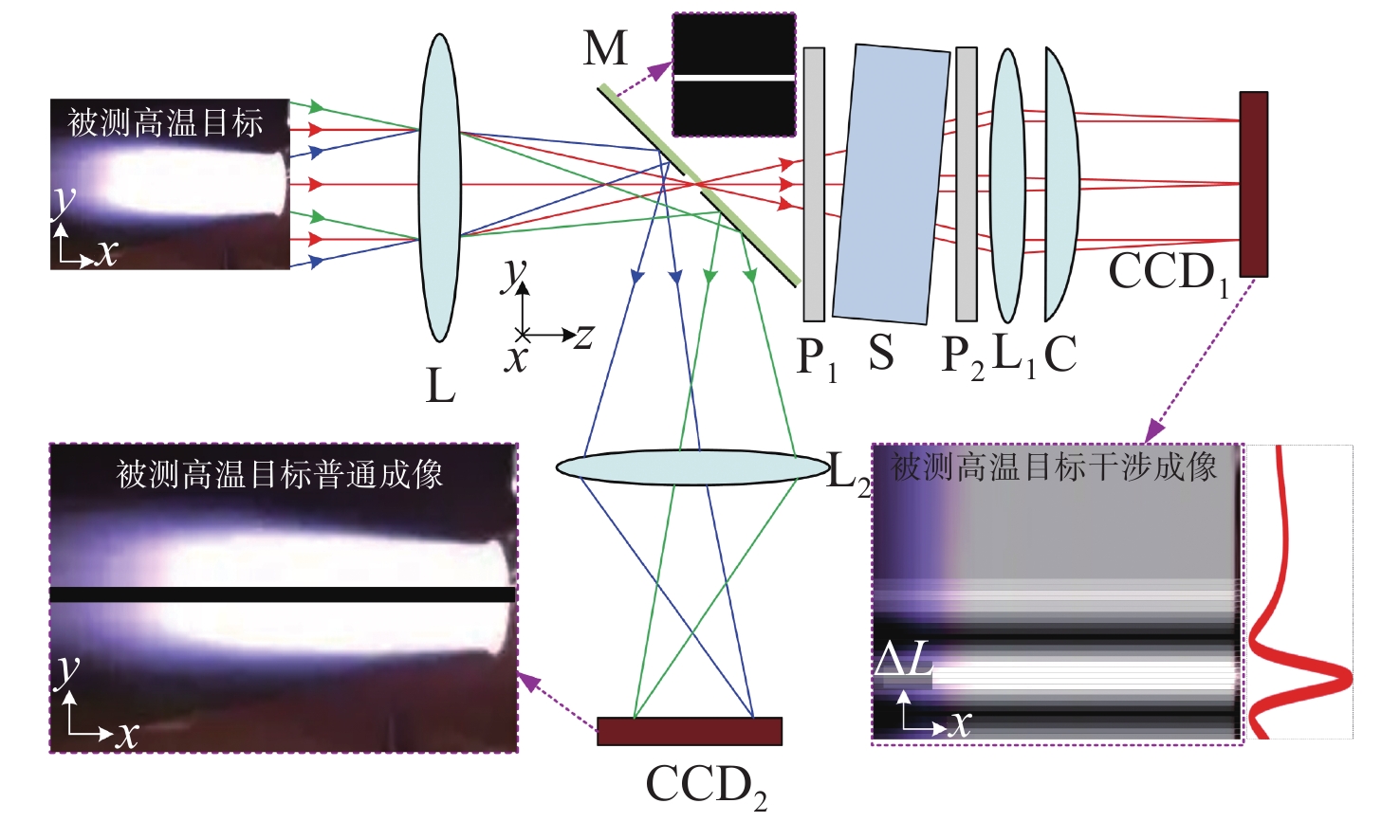
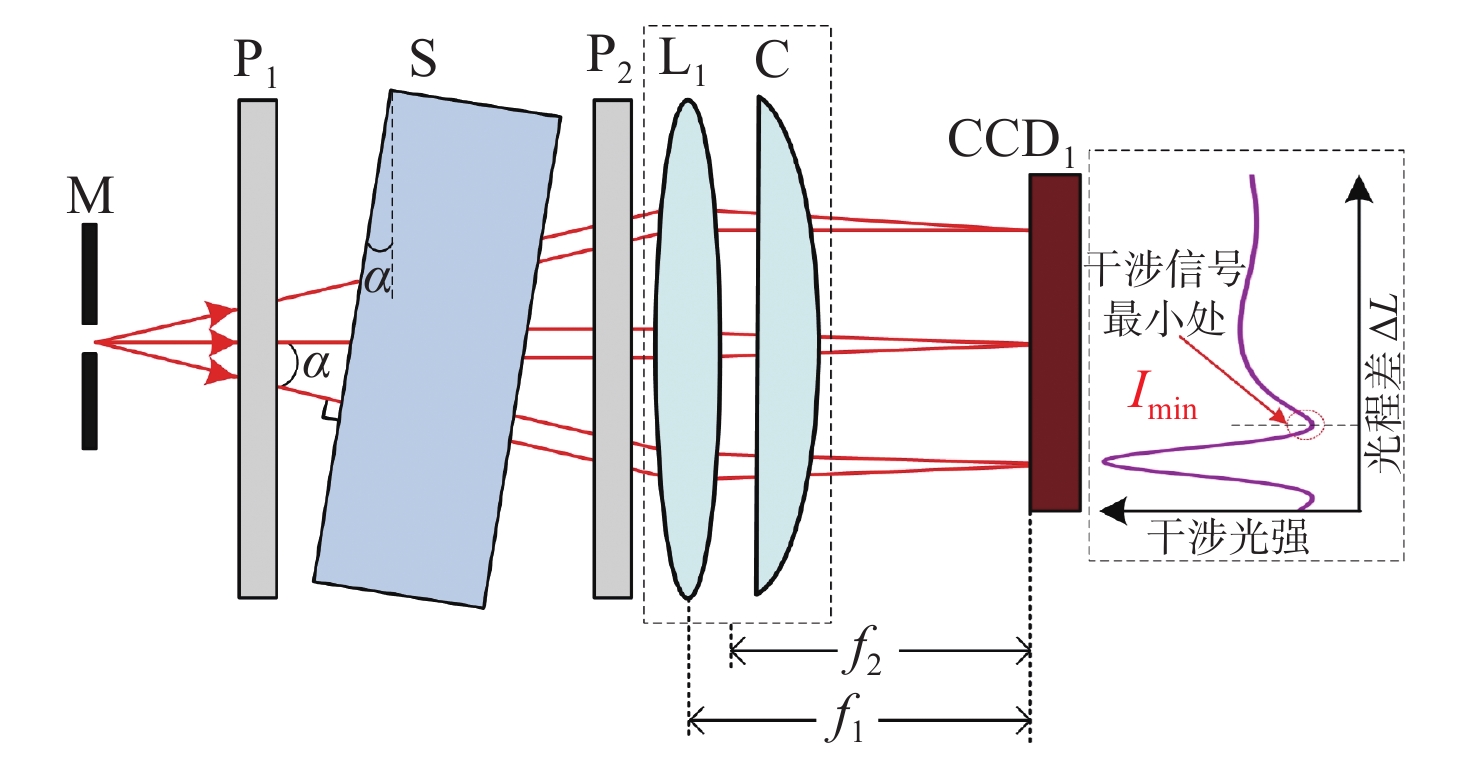
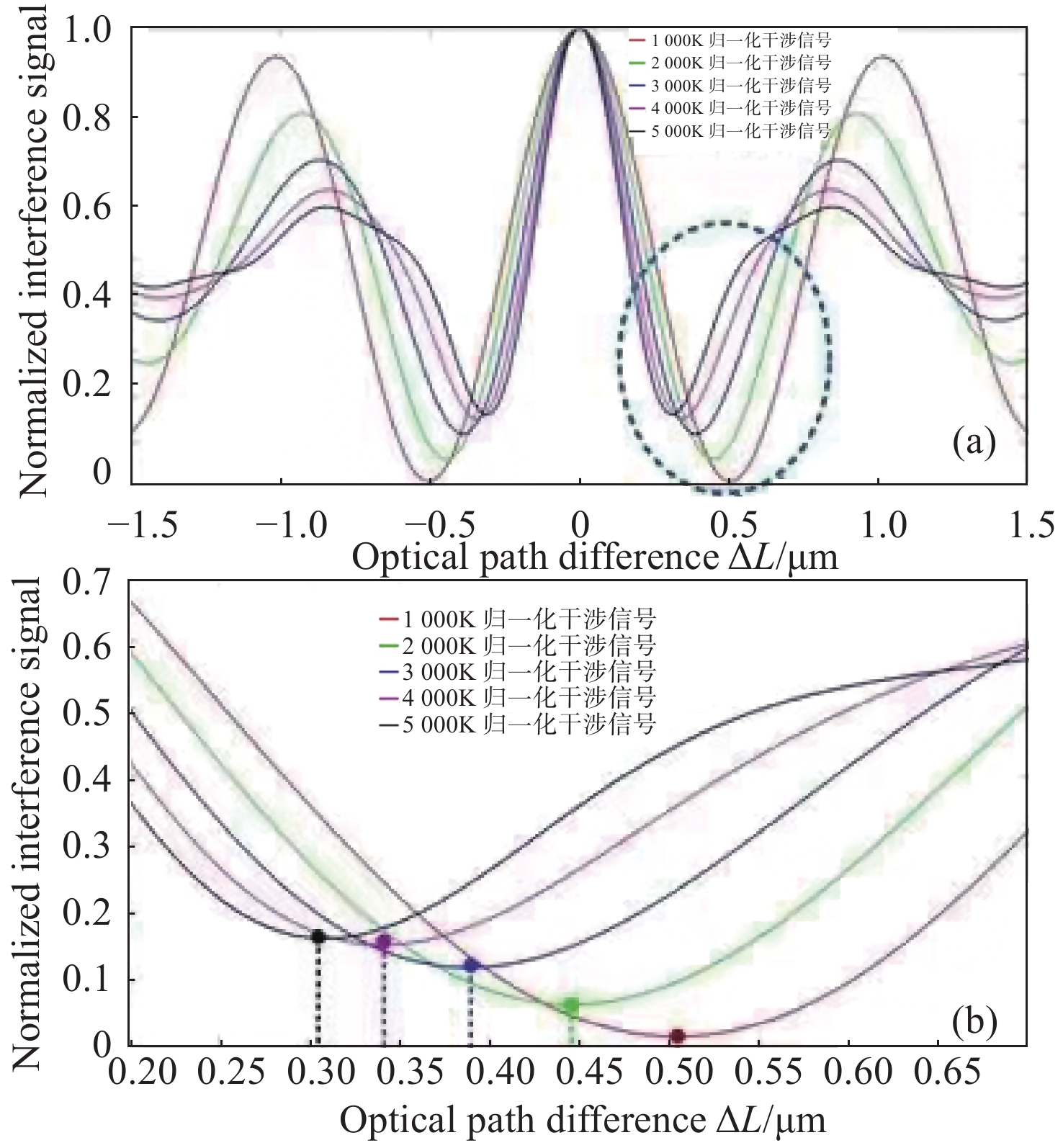
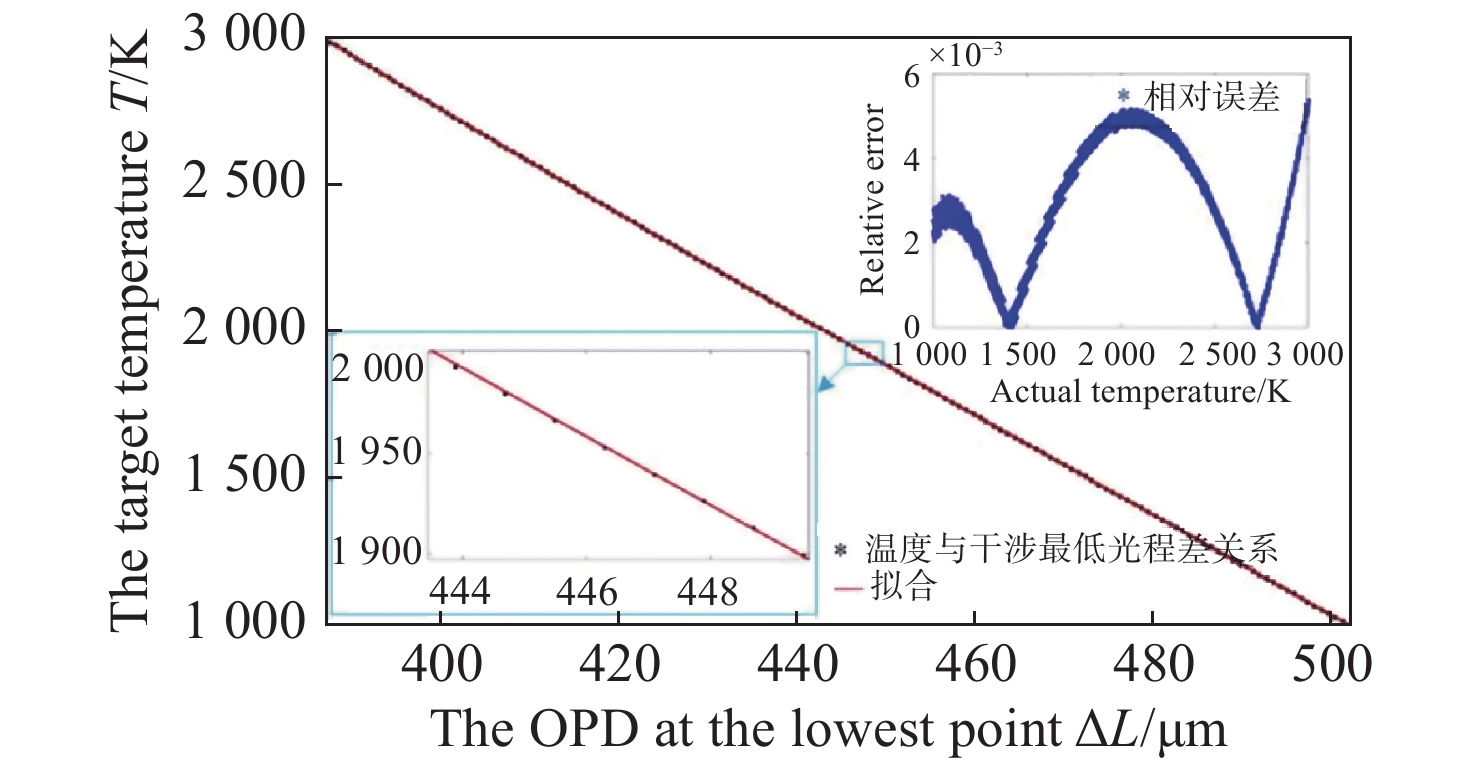
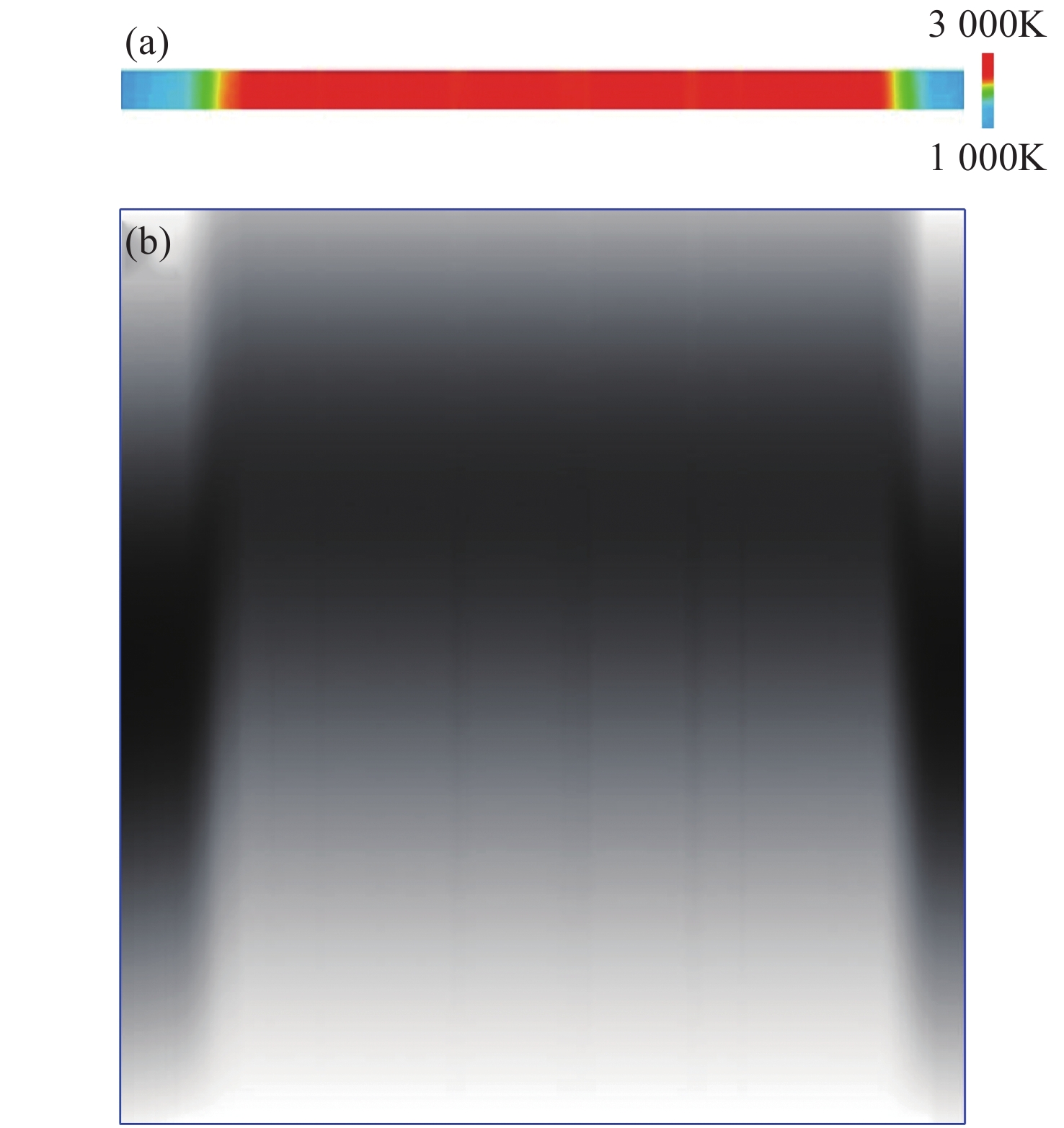
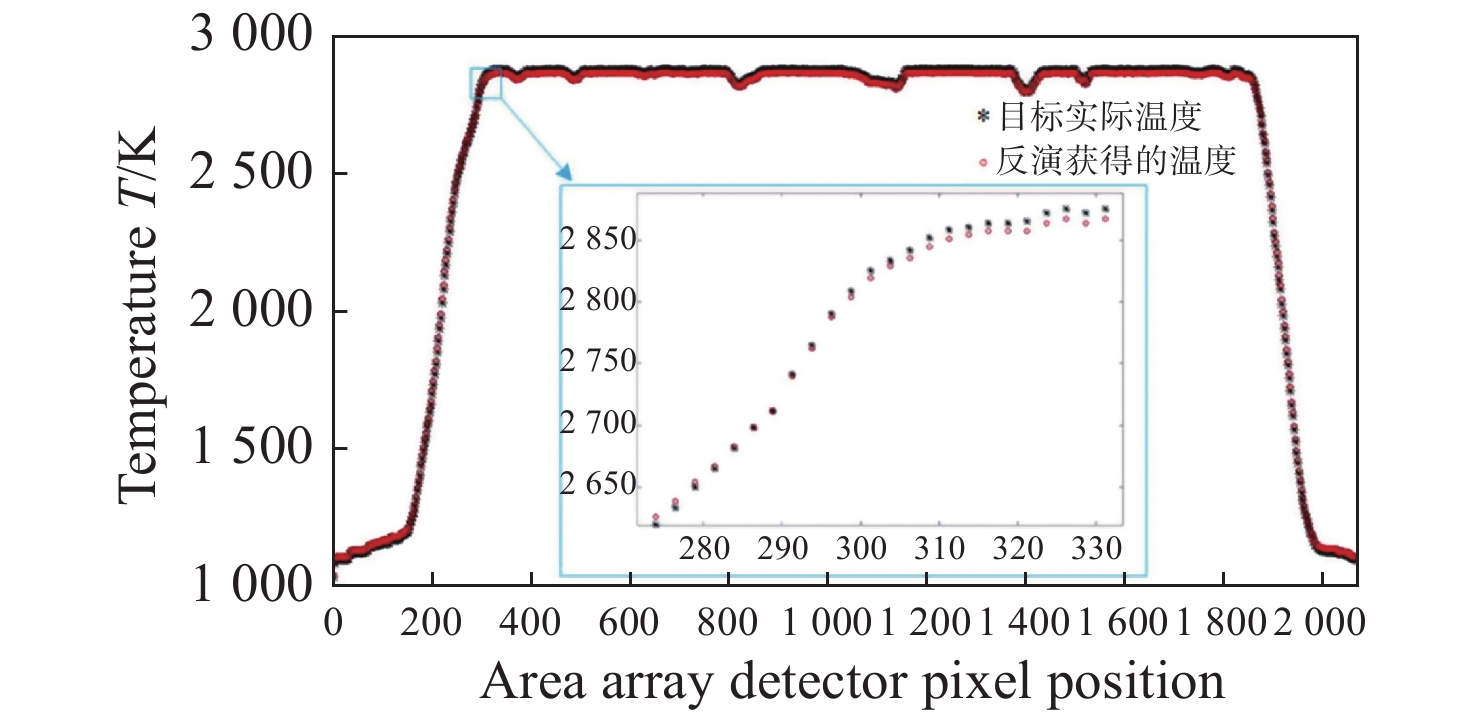
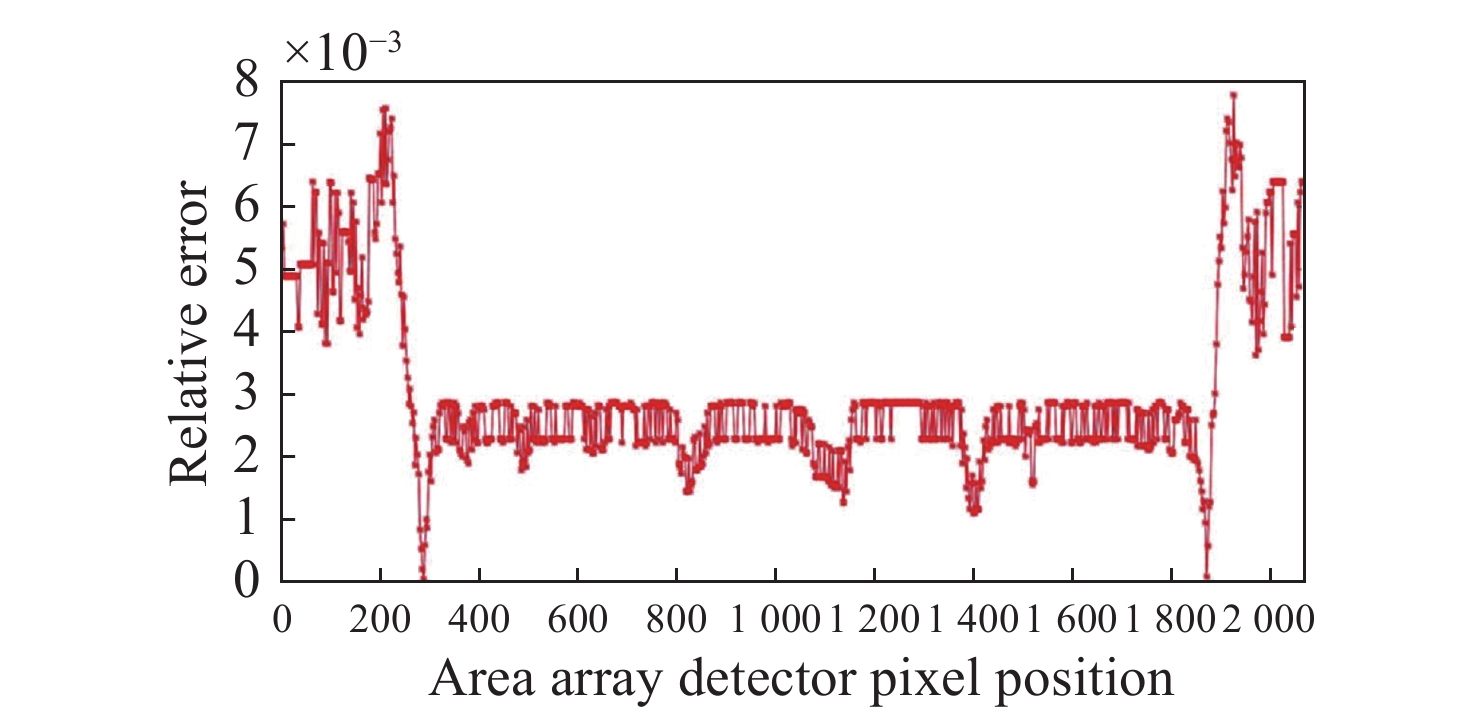
为了实现航空航天发动机尾焰、燃烧、爆炸等高温温度场的非接触高精度测量,对静态干涉型高温温度场探测方法展开研究。首先,设计静态干涉型高温温度场探测系统,理论分析高温温度场测量原理,研究高温干涉信号强度最低点光程差与温度的关系;其次,针对常用温度范围及可见光面阵探测器的响应波段,设计静态干涉具Savart棱镜,结合一维扫描实现温度场成像;最后,设计光学系统,拟合获得干涉最弱光程差与温度的对应关系,并获得线性拟合公式,仿真验证温度场经过系统后到达面阵探测器的干涉信号图像。结果表明,该静态干涉型高温温度场探测方法可实现1000 K−3000 K温度的高精度探测,且在线性区域,温度测量分辨率为1.4 K,温度测量相对误差优于0.8%。本文研究为军民领域的高精度高温温度场成像提供参考。

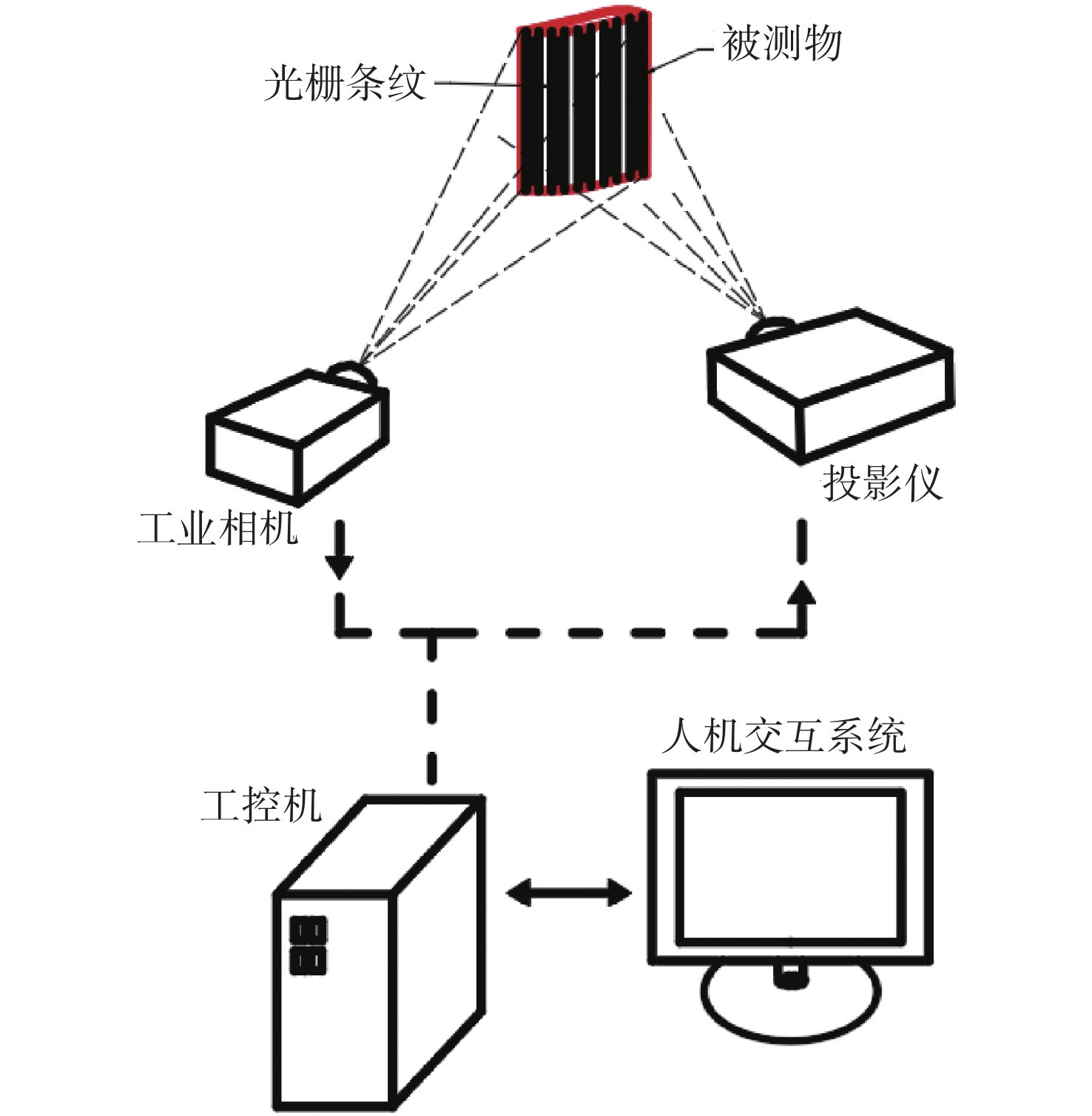
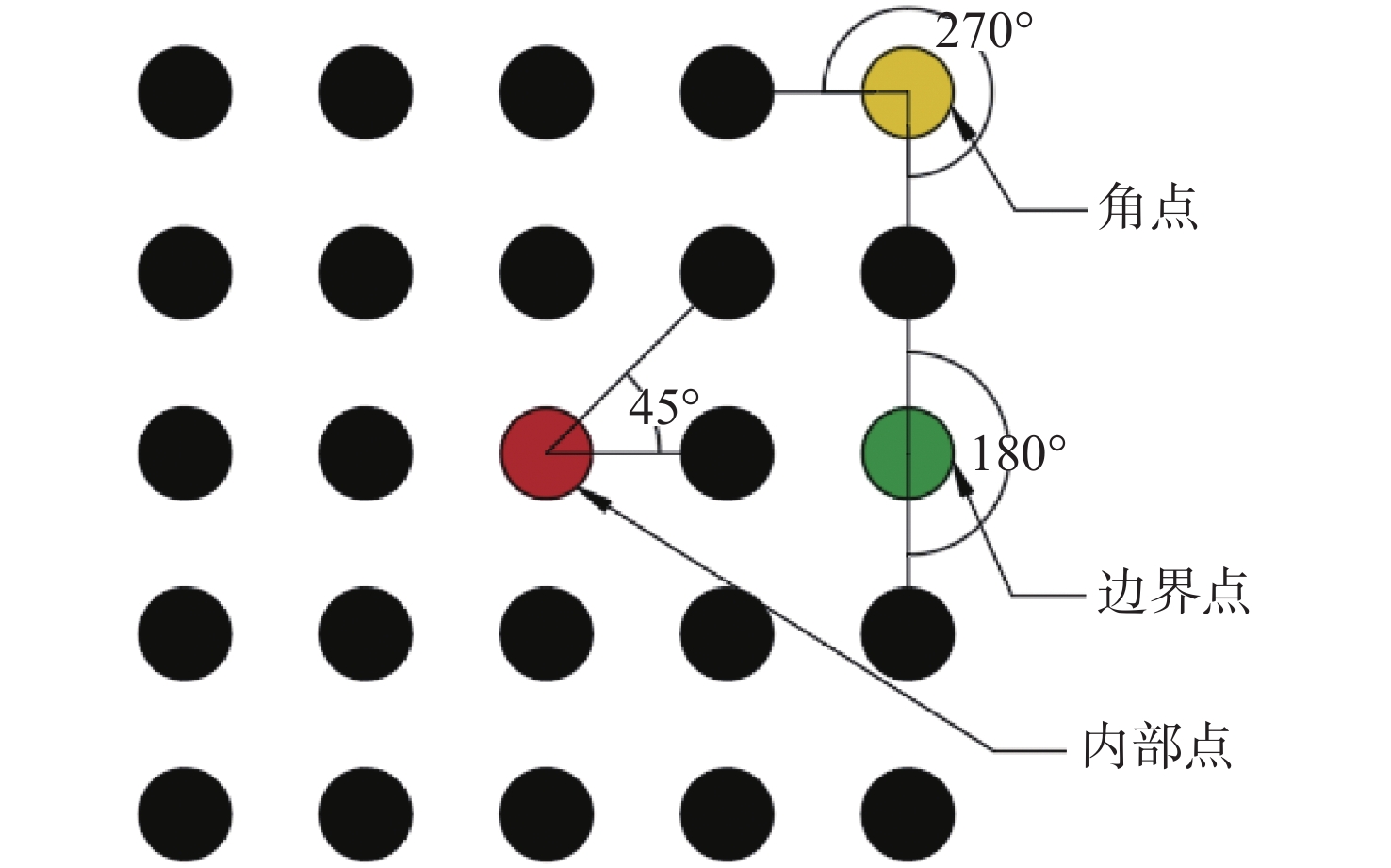
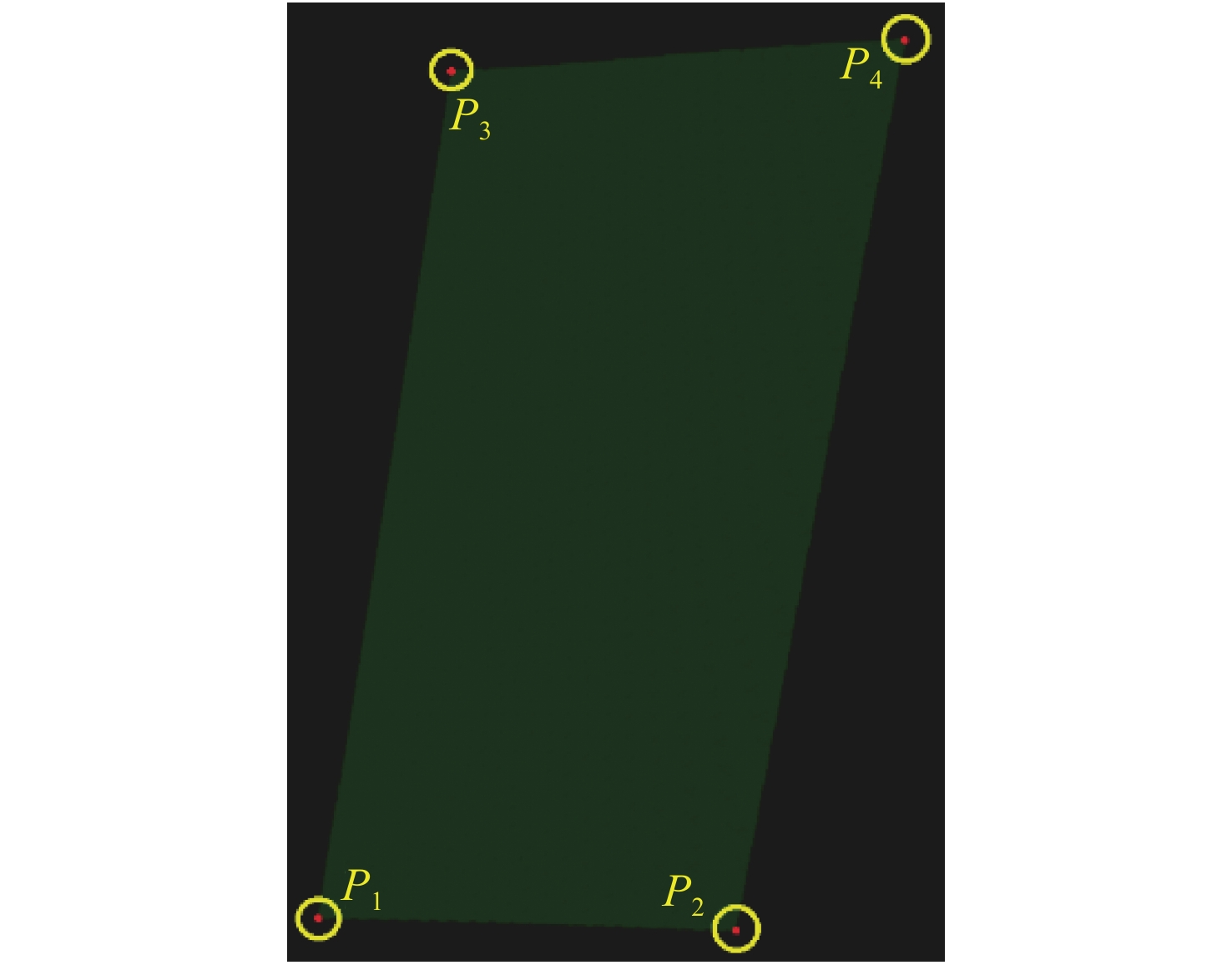
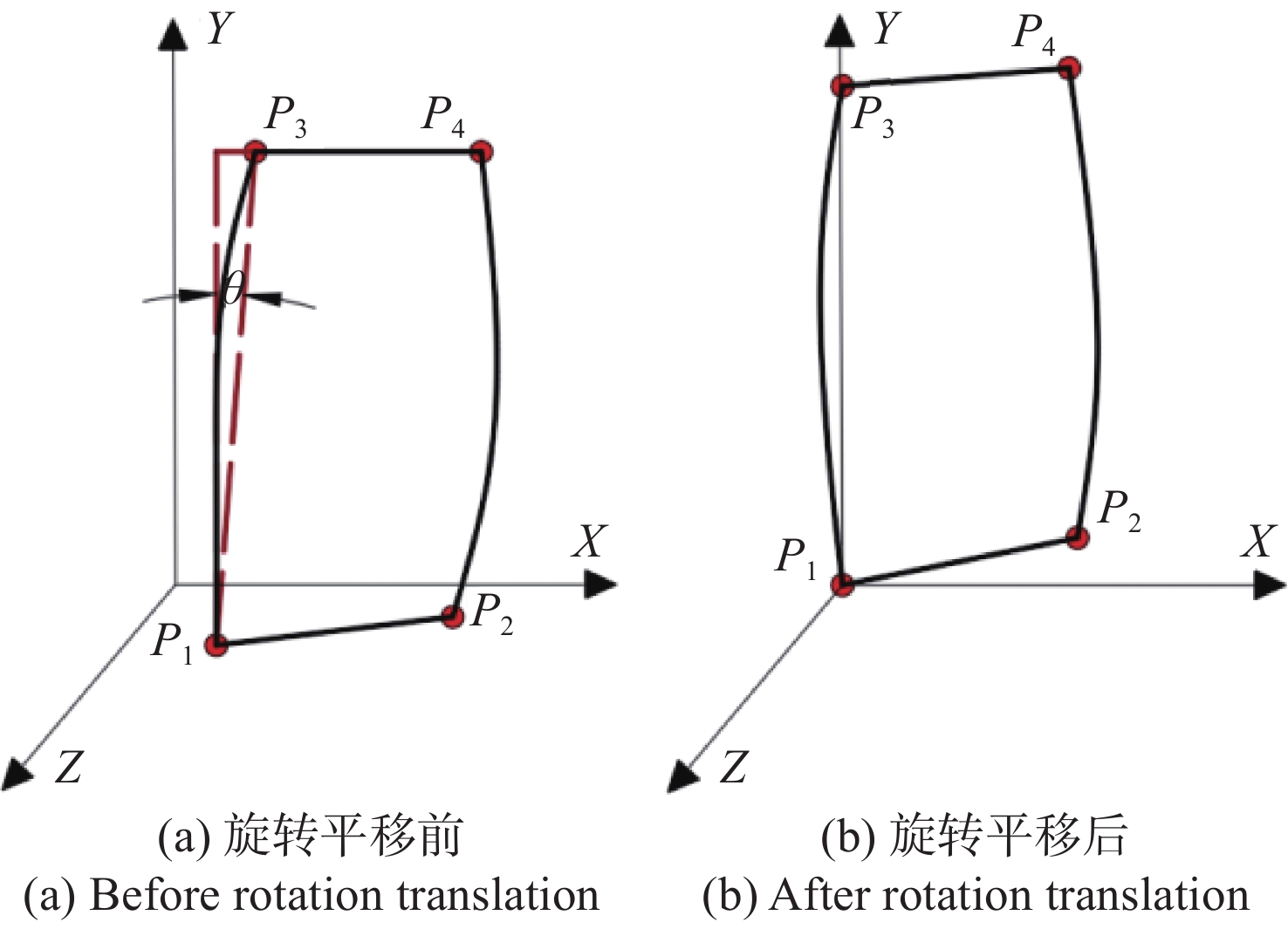
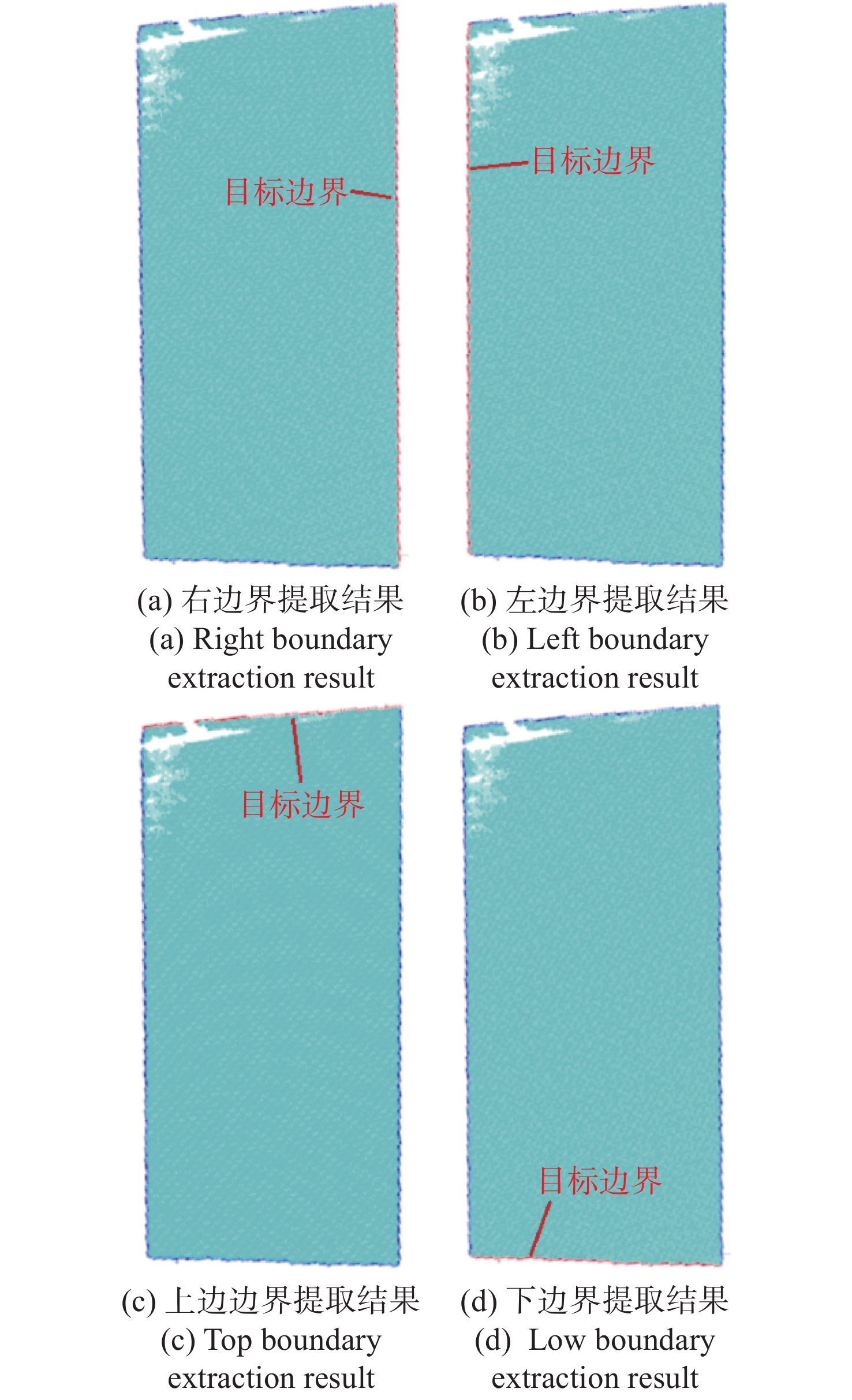
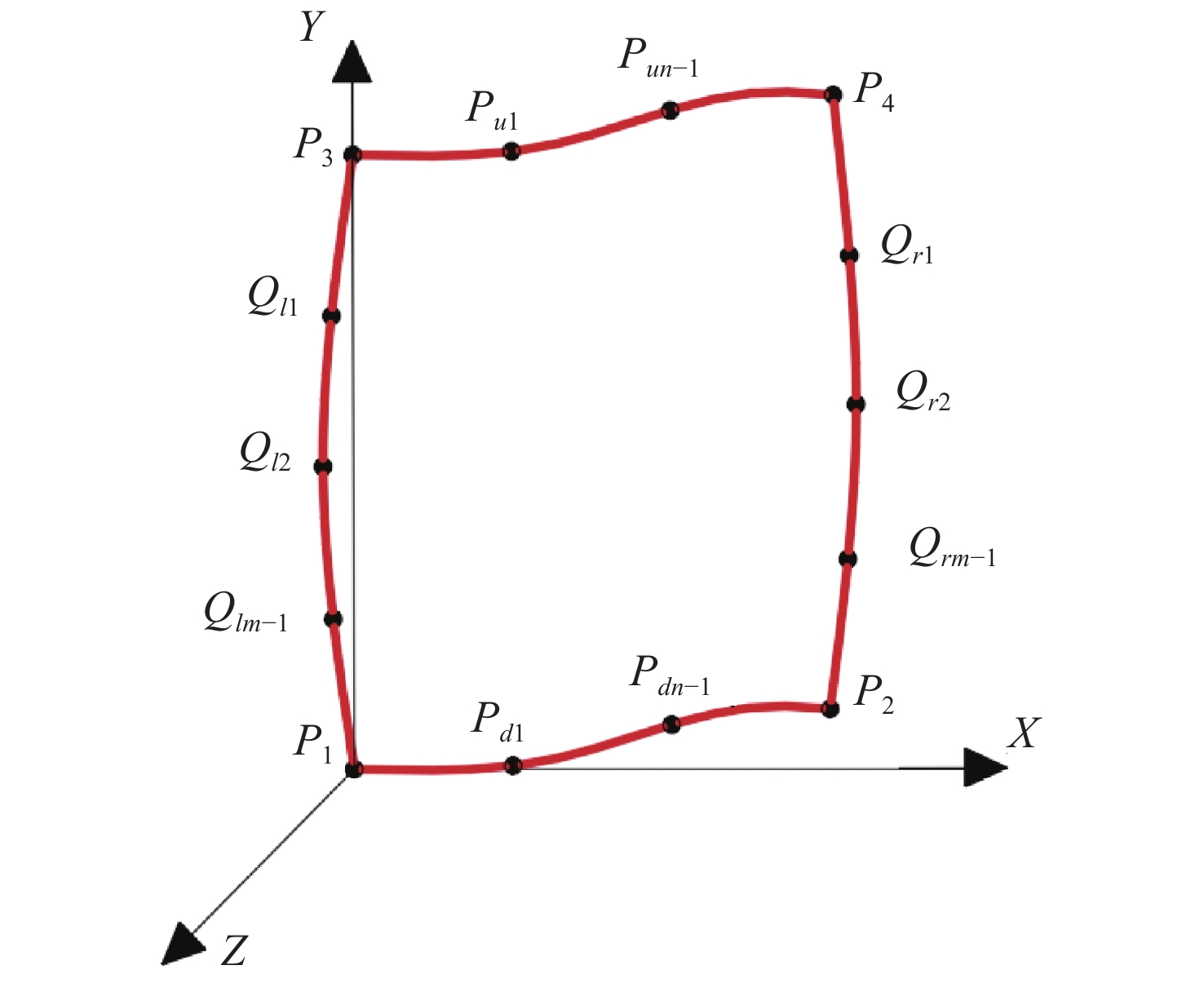
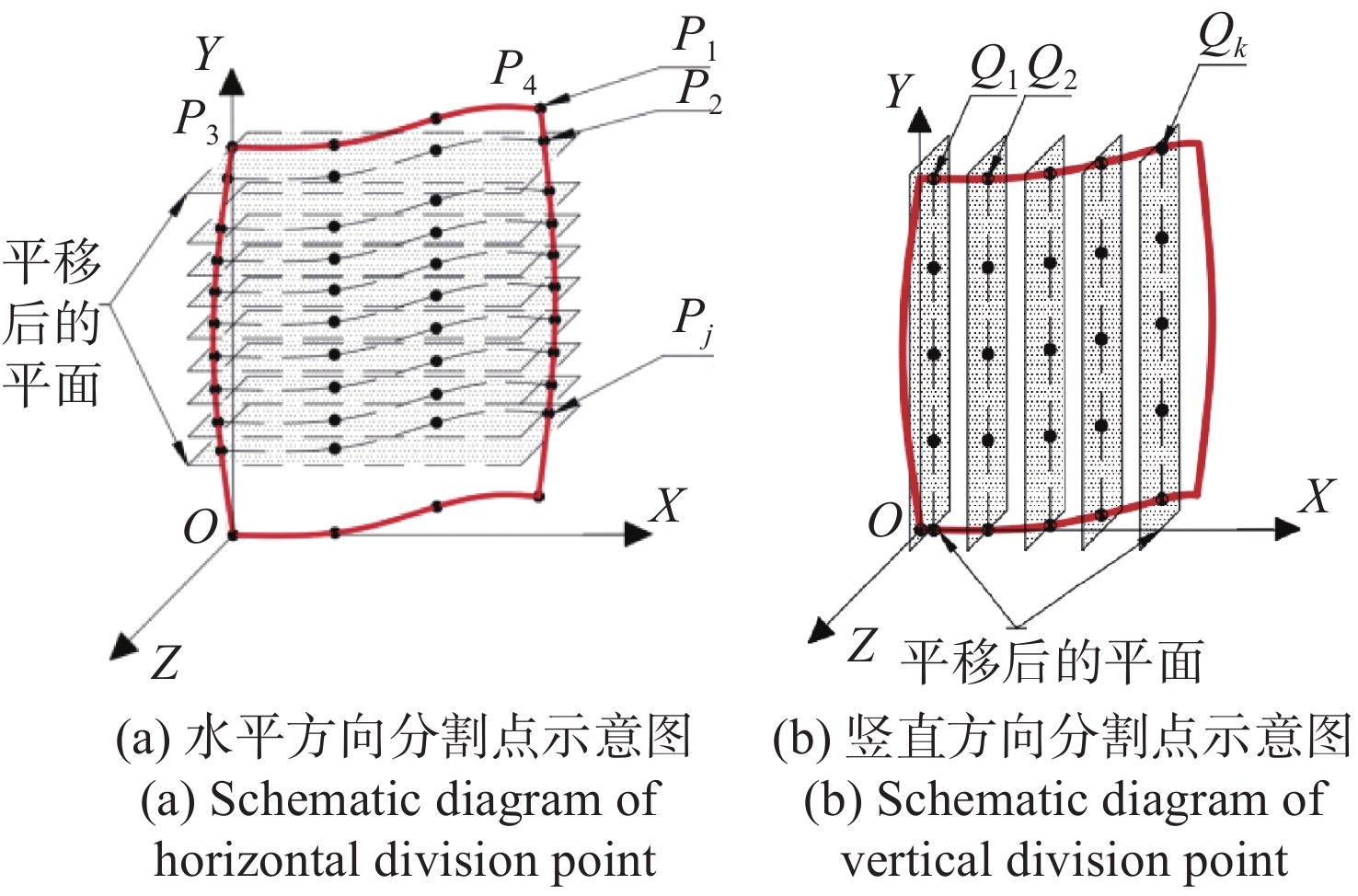
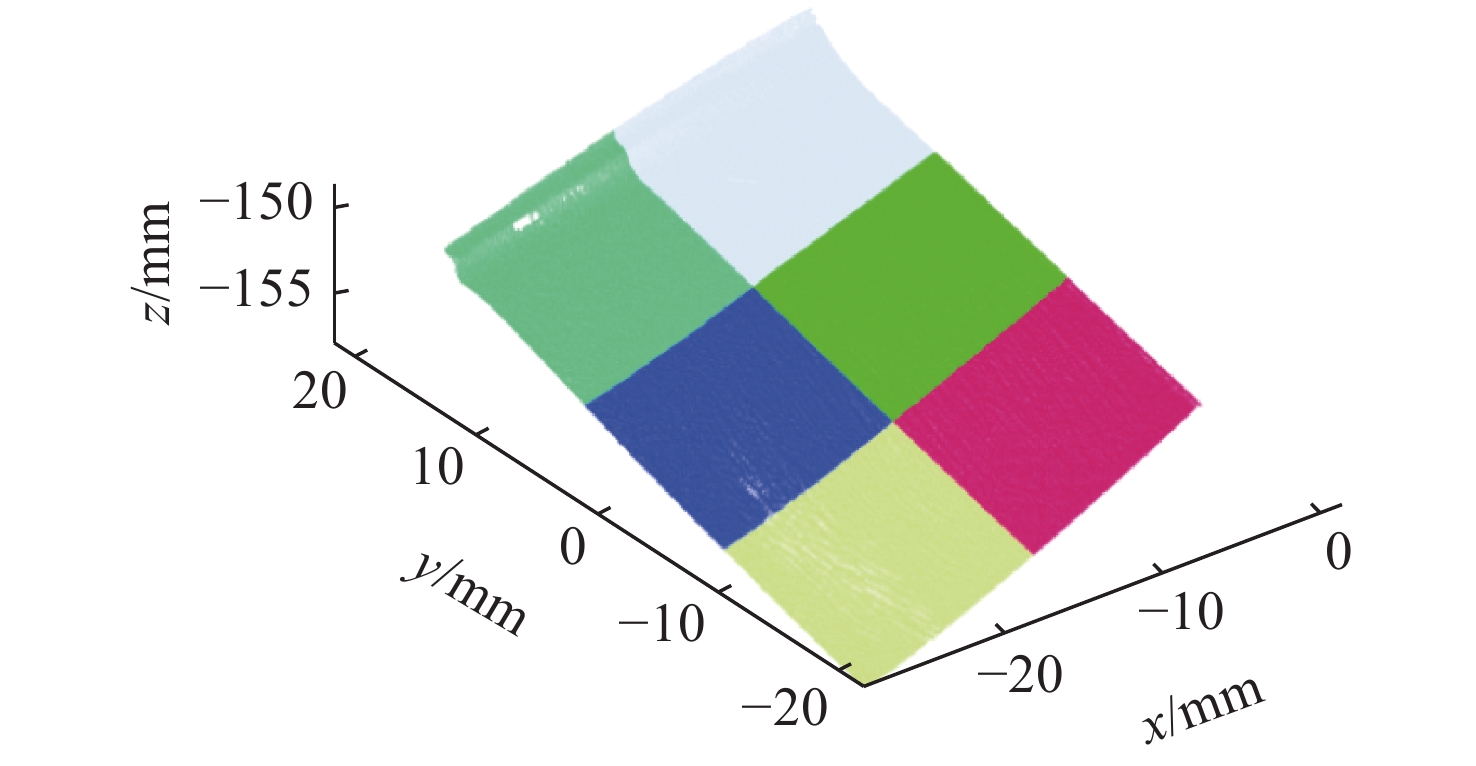
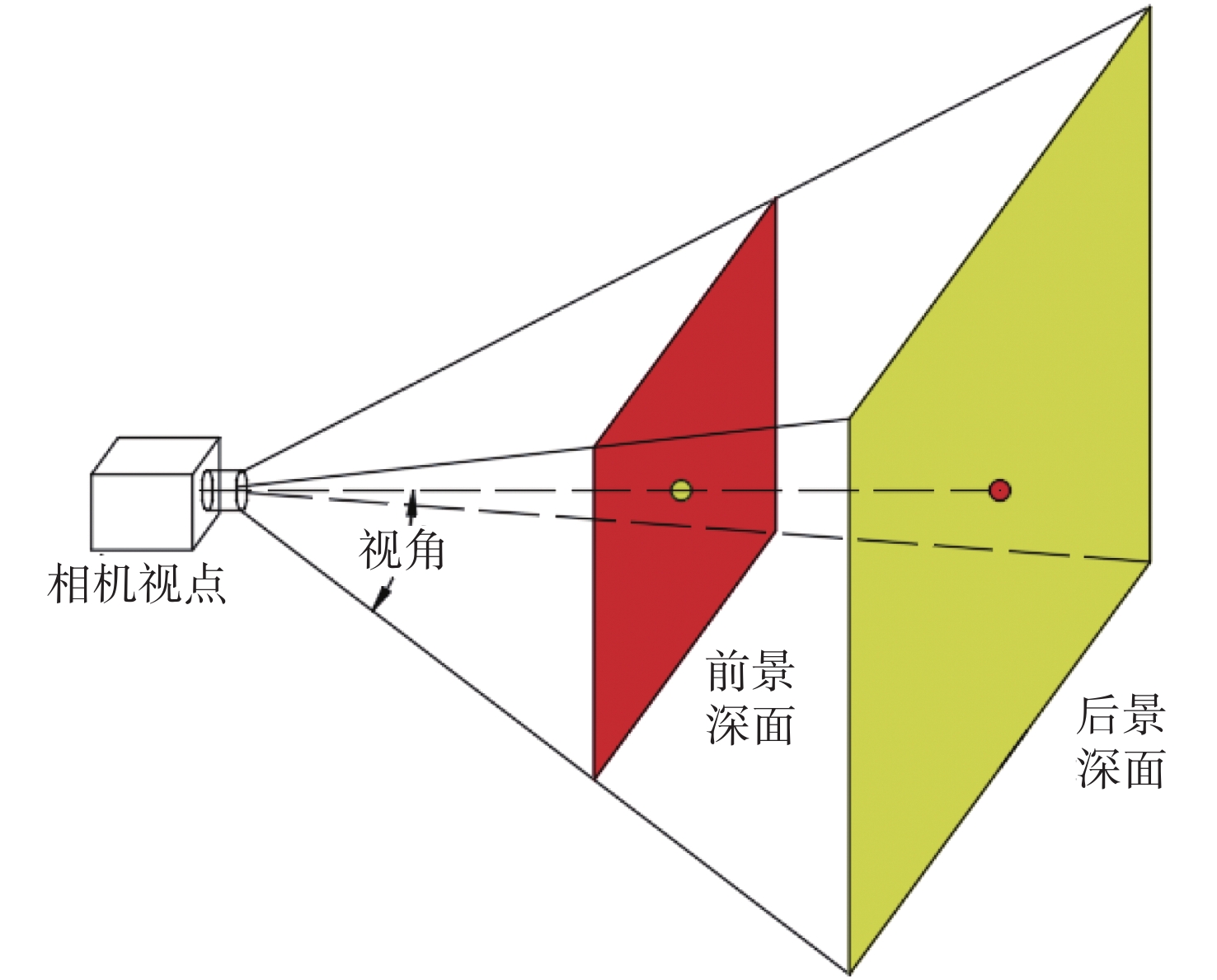
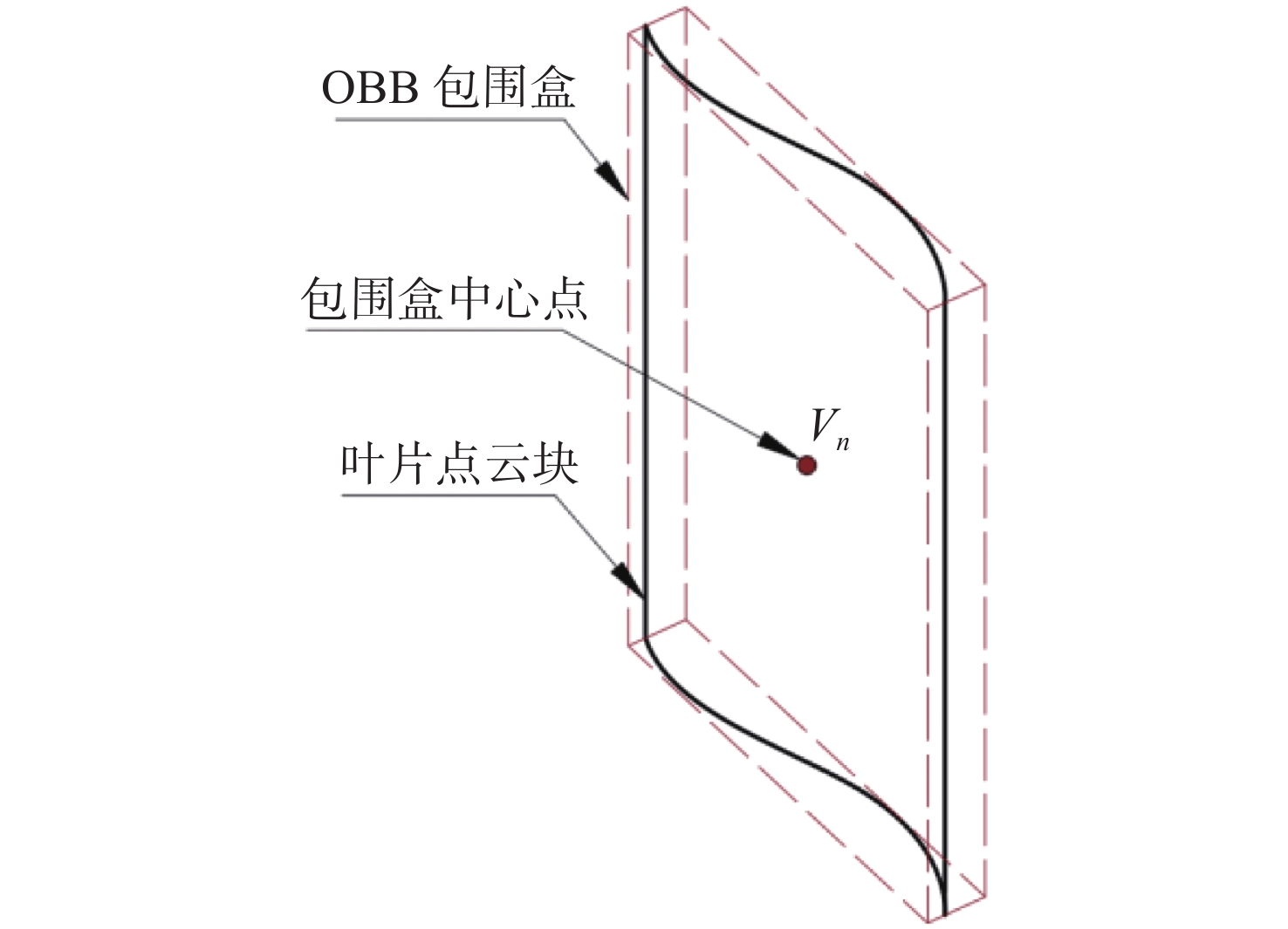
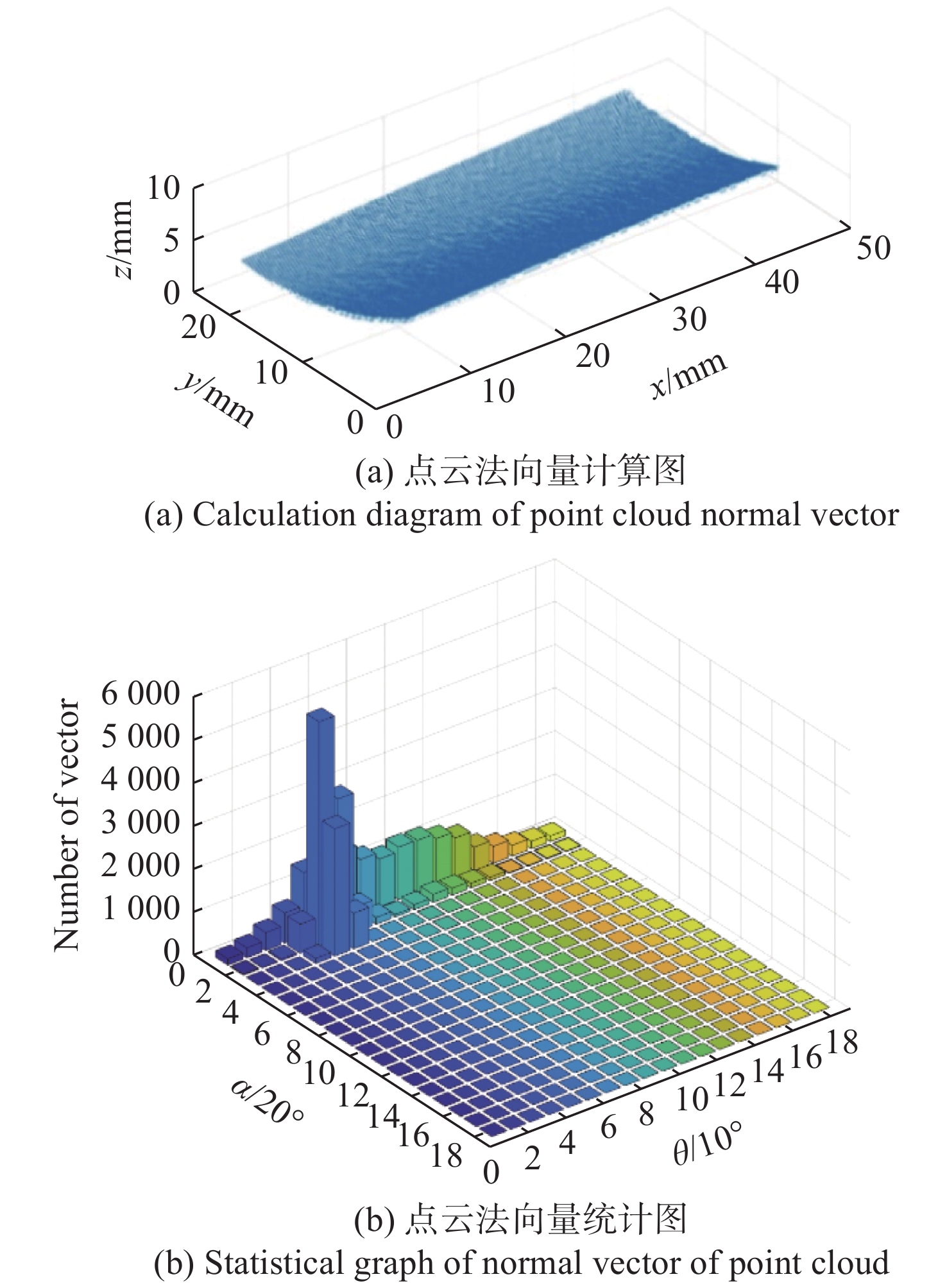
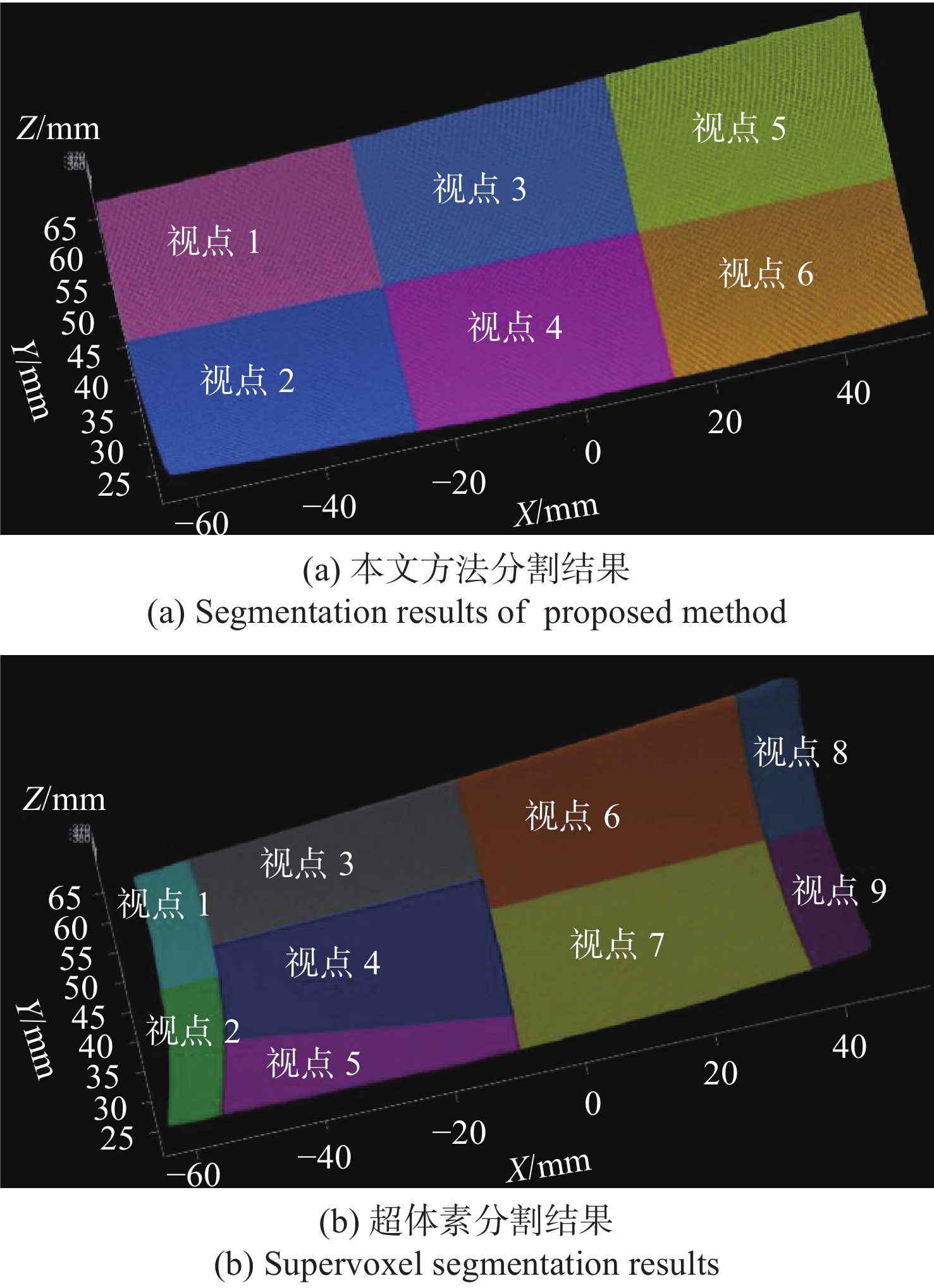
航空发动机叶片的加工质量与检测精度对于叶片的使用寿命有着十分重要的影响。本文提出一种基于结构光的高精度扫描视点规划方法以提高叶片检测精度。首先,对叶片整体尺寸进行粗扫描,获取粗模型数据,并根据相机分辨率与采集精度确定视野范围。其次,利用改进Angle Criterion算法进行边界提取,根据边界坐标与视野范围完成边界分割点的确定,利用曲面的截面线法对粗模型进行切片,根据切片结果确定内部分割点,从而完成点云均匀分割。然后,对分割后的点云数据建立有向包围盒获取中心点坐标,并对其法向量进行统计,确定主法线方向,从而生成高精度扫描的视点坐标。最后,对叶片进行表面形貌检测验证,实验结果表明,与超体素分割的视点采集结果相比,本文方法的平均标准差降低了0.0054 mm,且采集视点减少了1/3。提出的视点规划方法在薄壁叶片在机加工检测领域具有良好的应用前景。





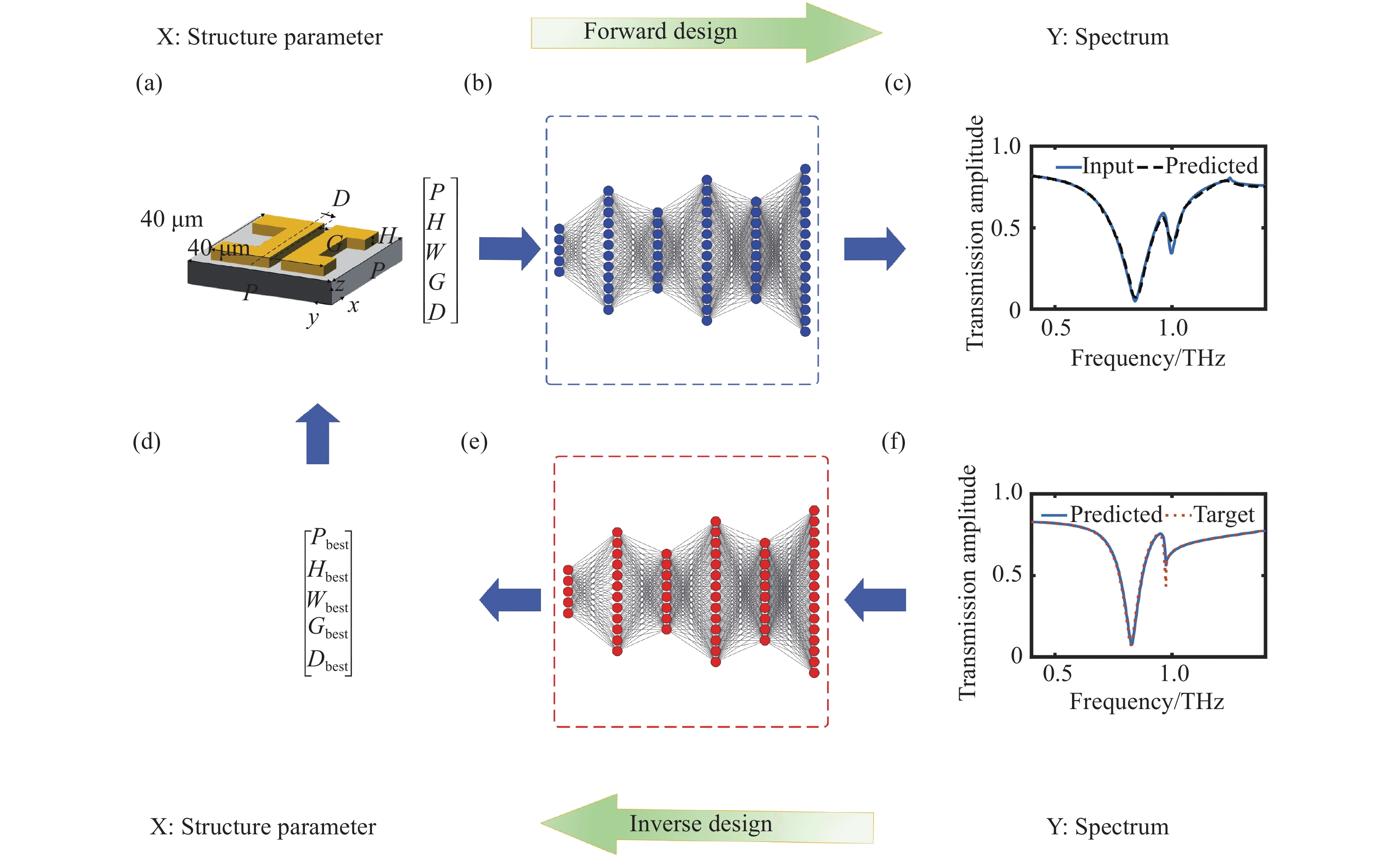
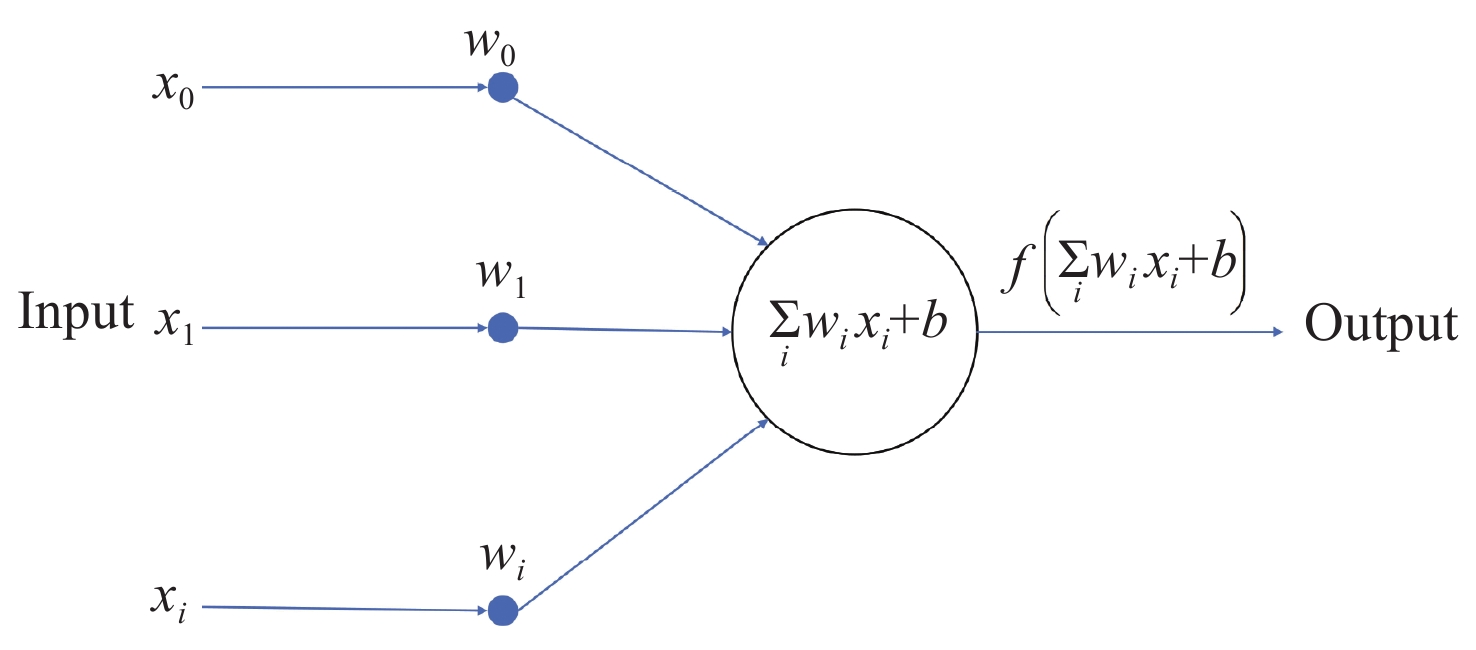
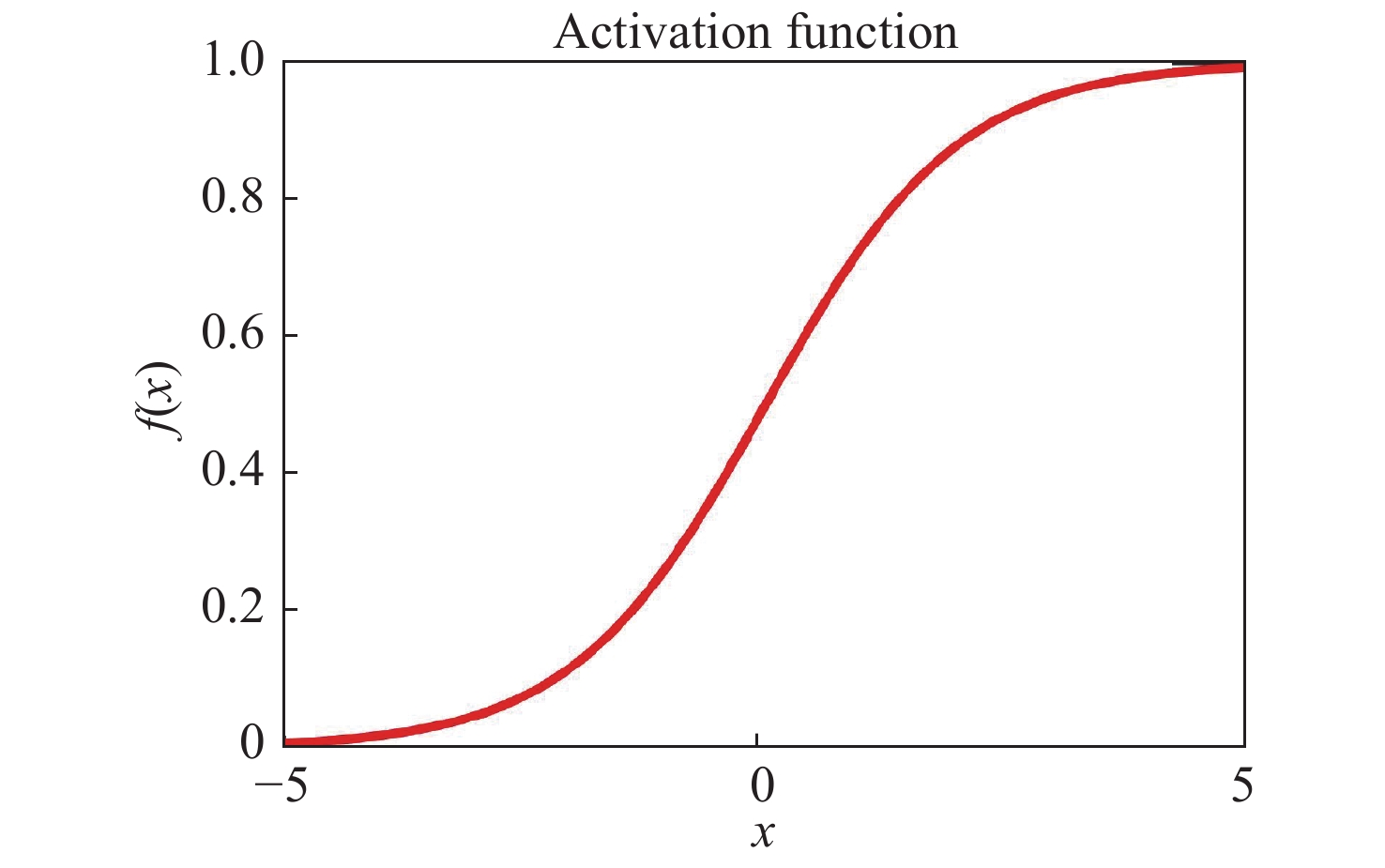
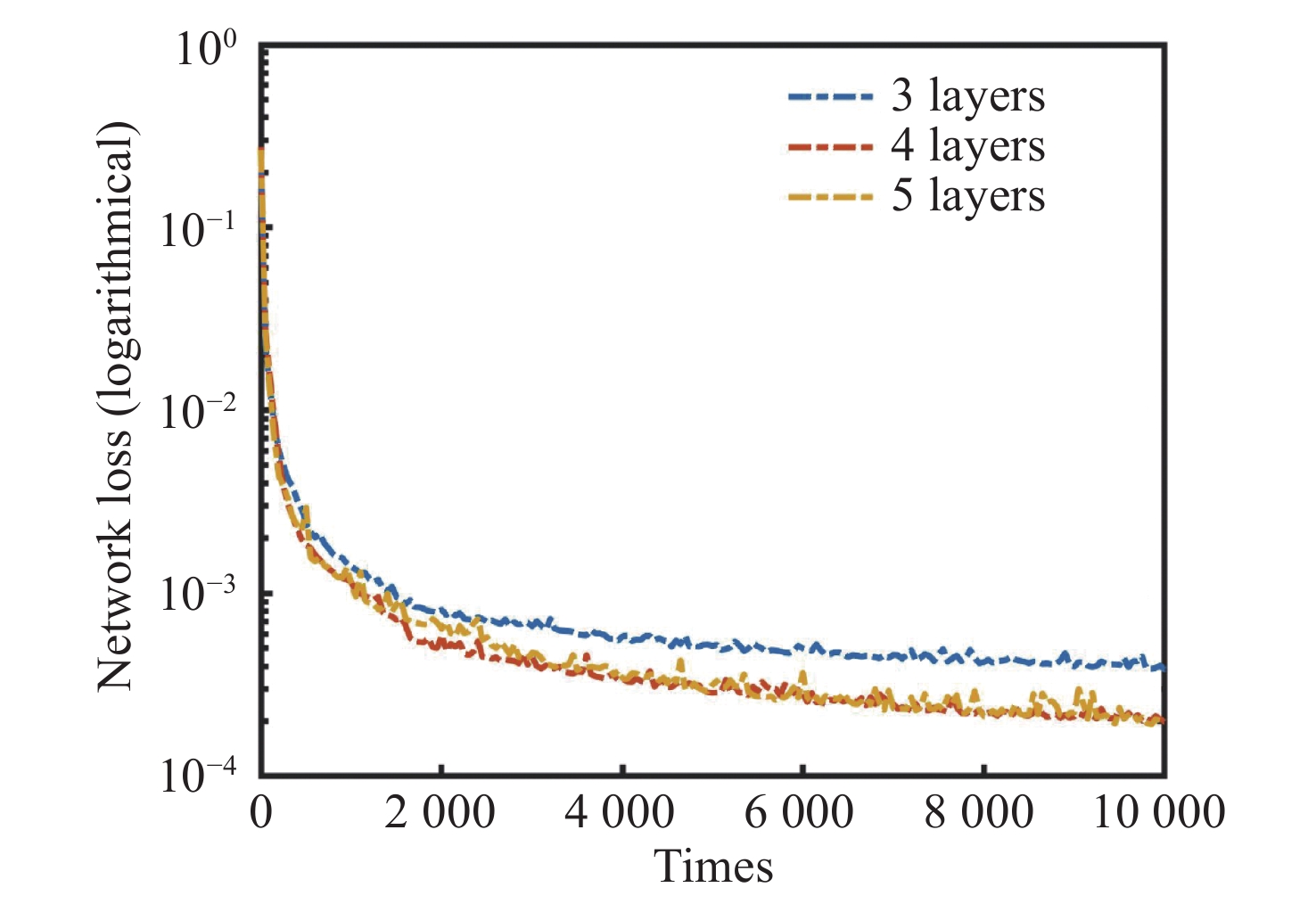
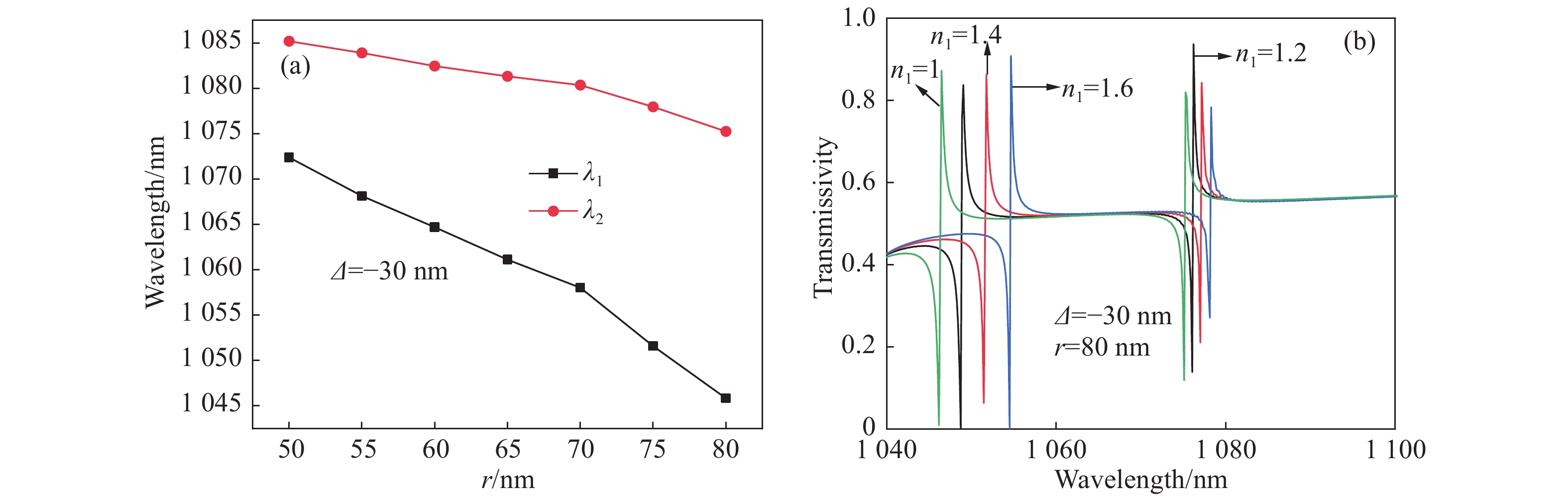
本文提出了一种基于深度学习的超材料Fano共振设计方法,能够获得高Q共振的线宽、振幅和光谱位置特性。利用深度神经网络建立结构参数和透射谱曲线之间的映射,正向网络实现对透射谱的预测,逆向网络实现对高Q共振按需设计,设计过程中实现了低均方误差(MSE),训练集的均方误差为 0.007。与传统方法需要耗时的逐个数值模拟相比,深度学习设计方法大大简化了设计过程,实现了高效、快速的设计目标。对Fano共振的设计也可推广应用到其它类型的超材料的自动逆向设计,显著提高了更复杂的超材料设计的可行性。


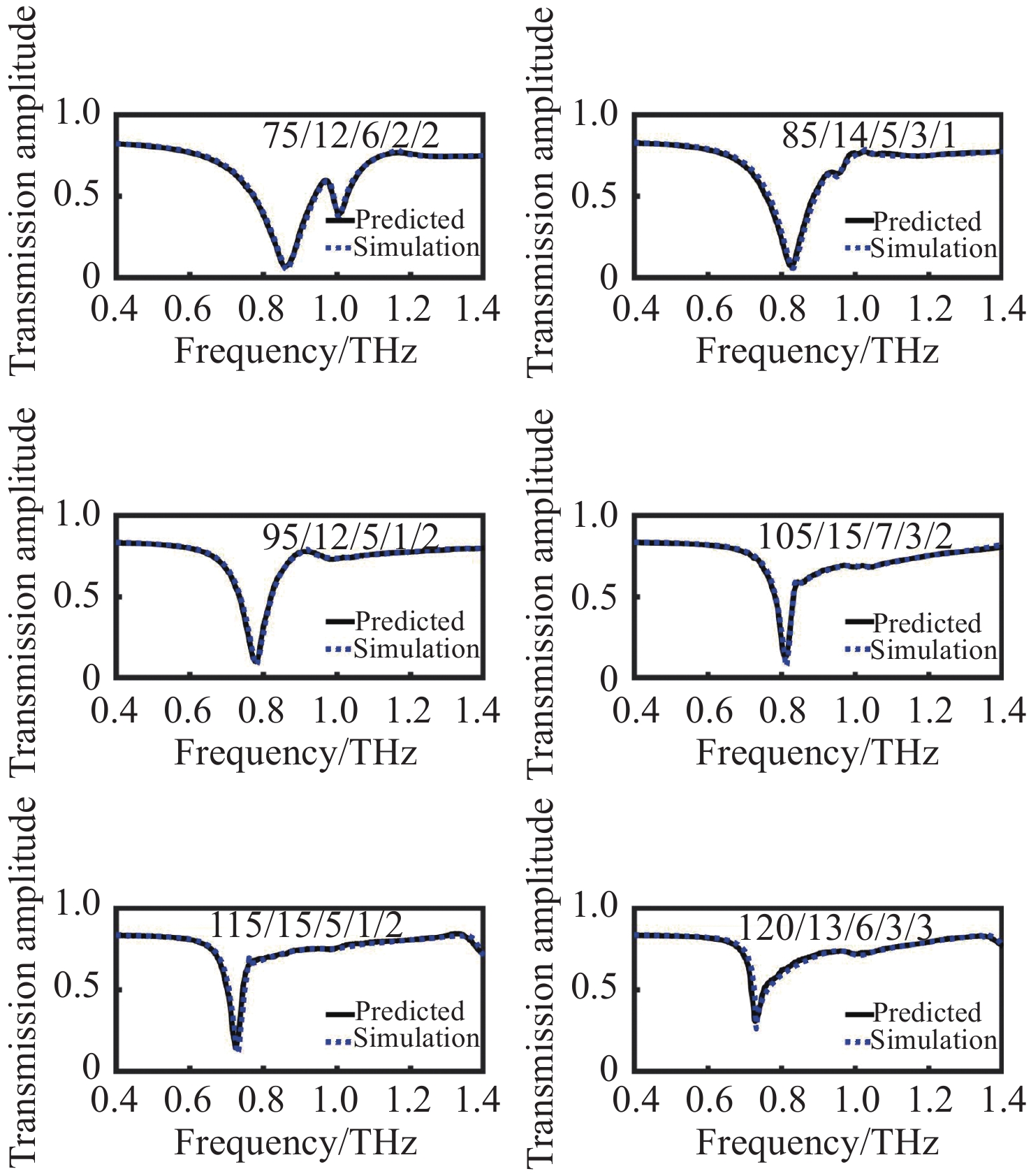

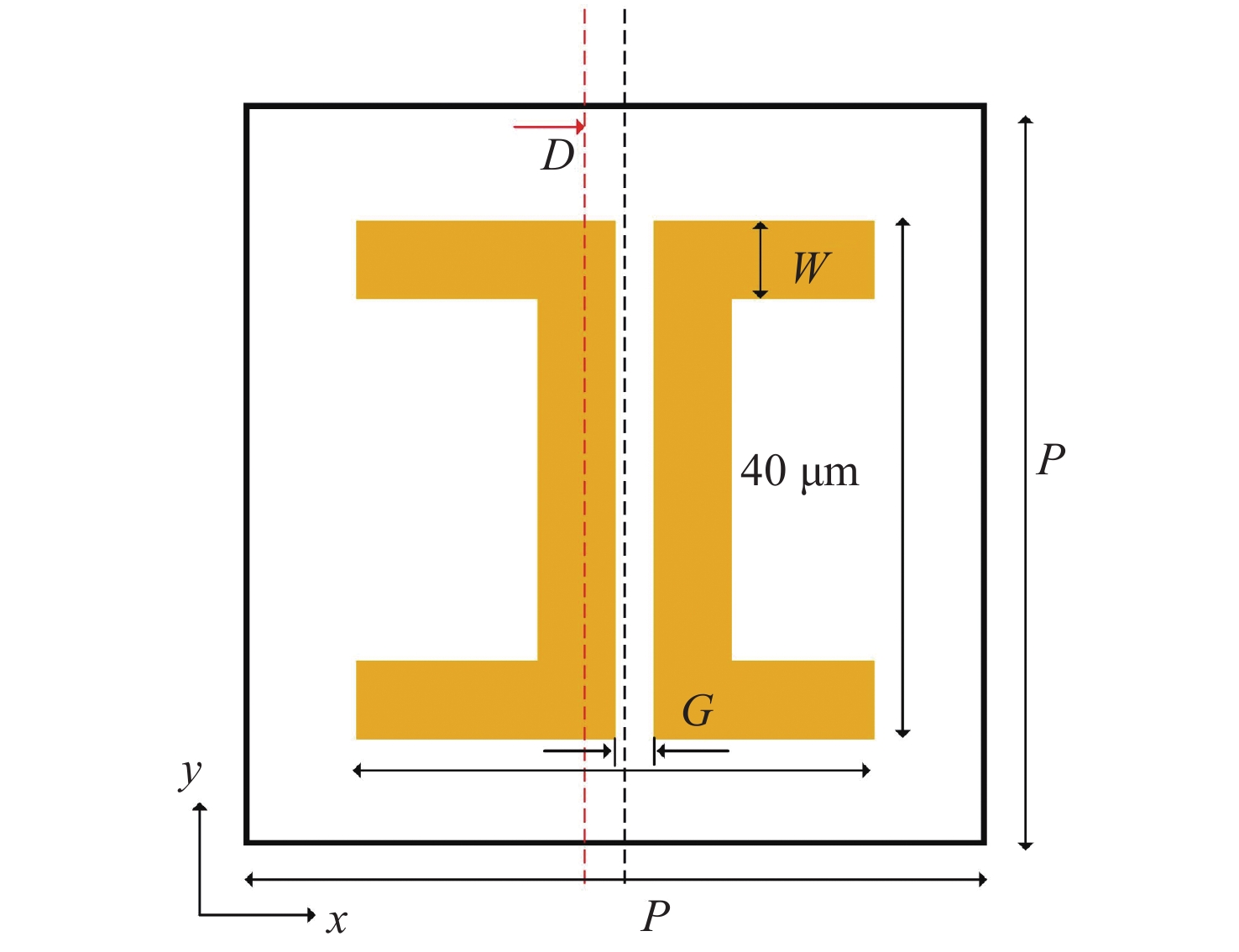
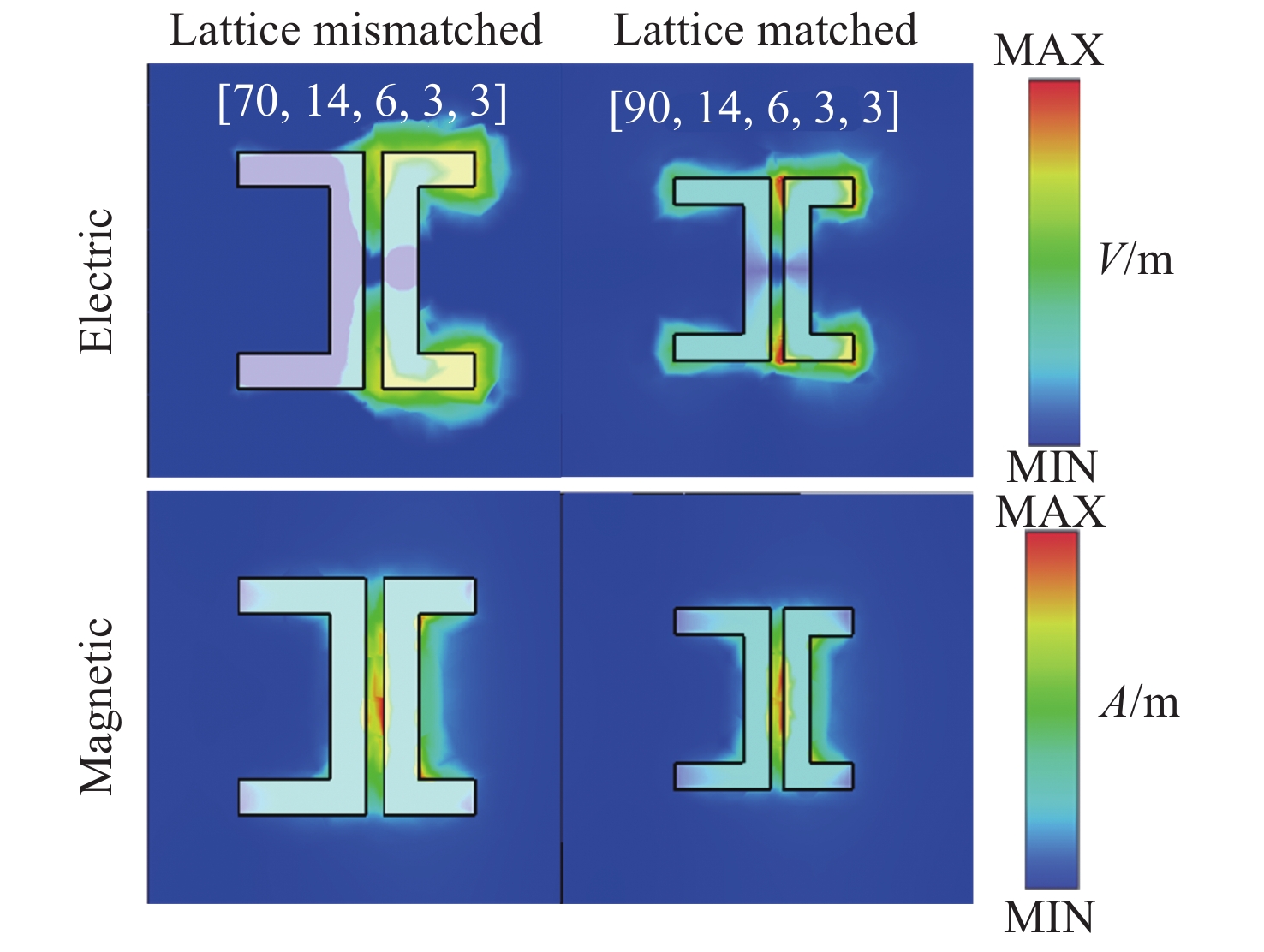
为了提高品质因子(Quality value,


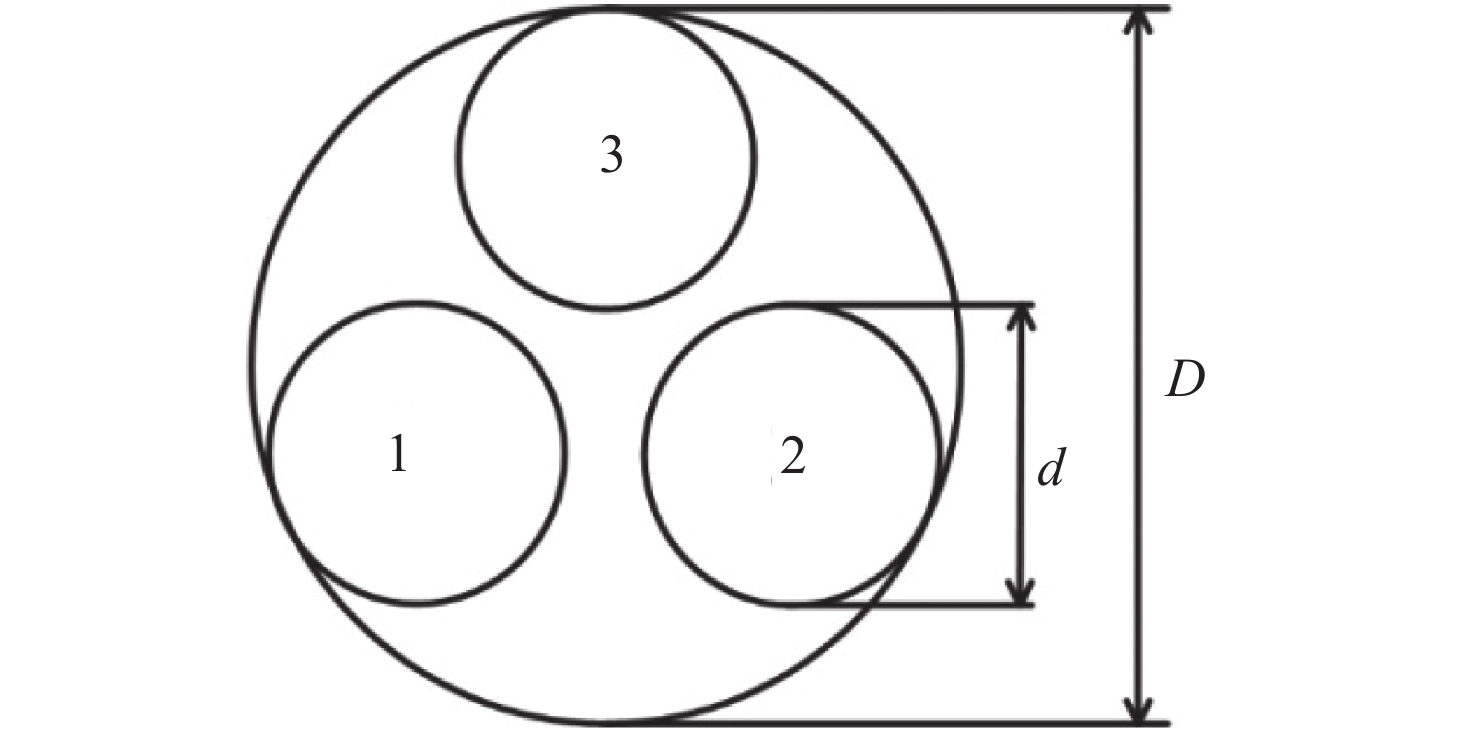
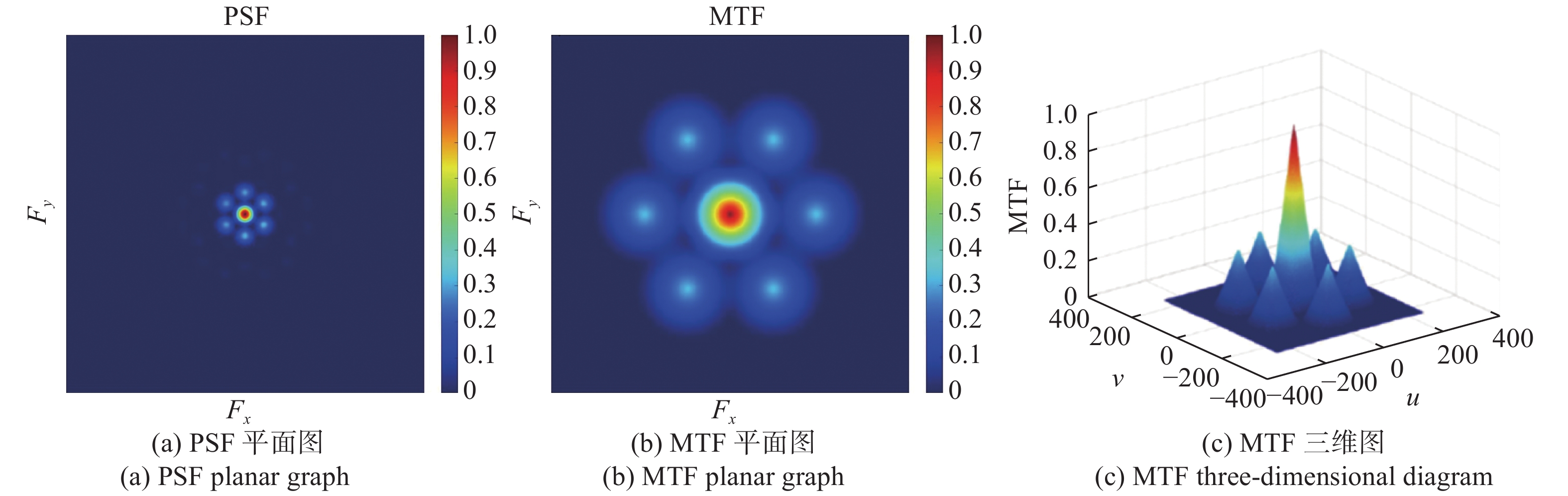
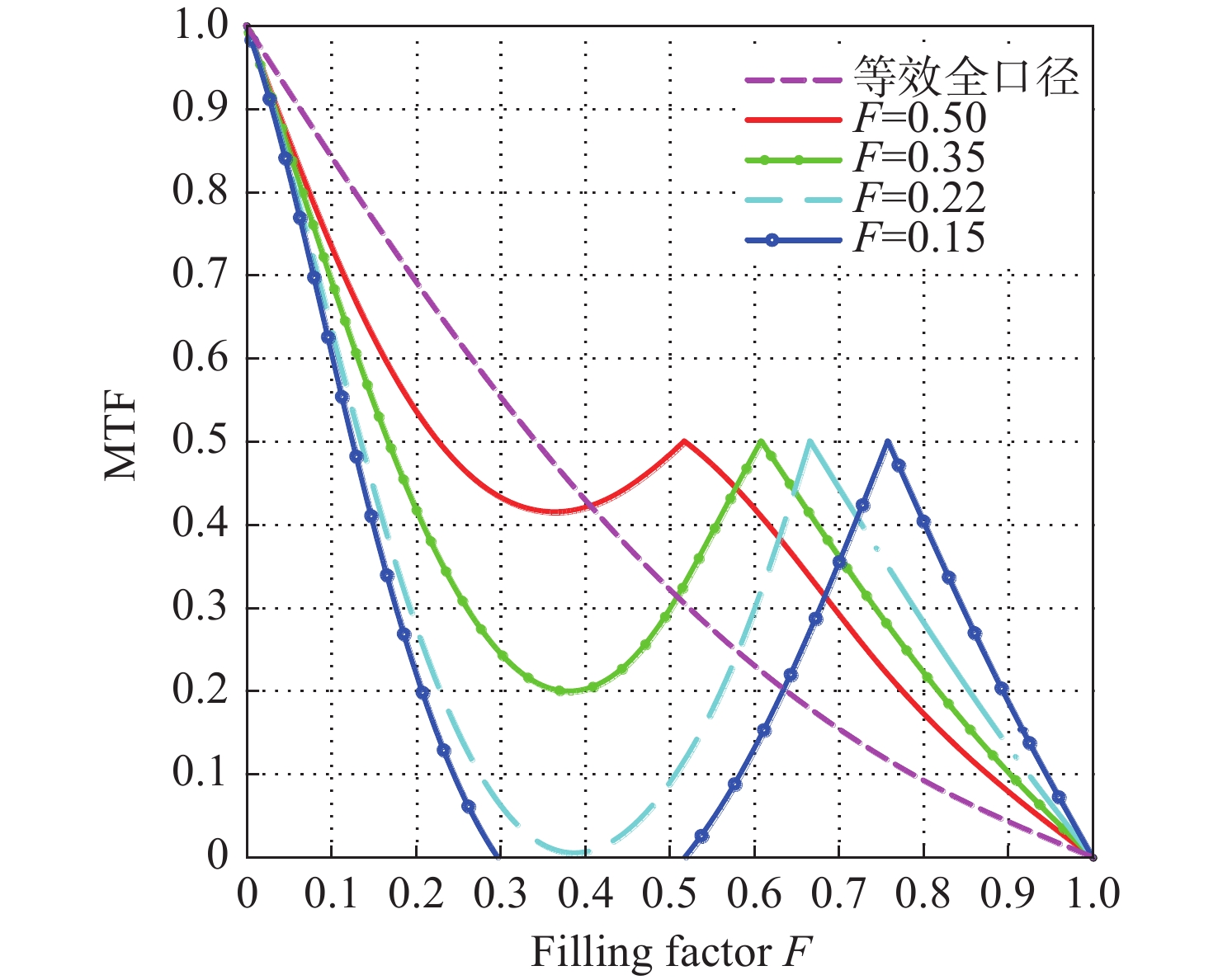
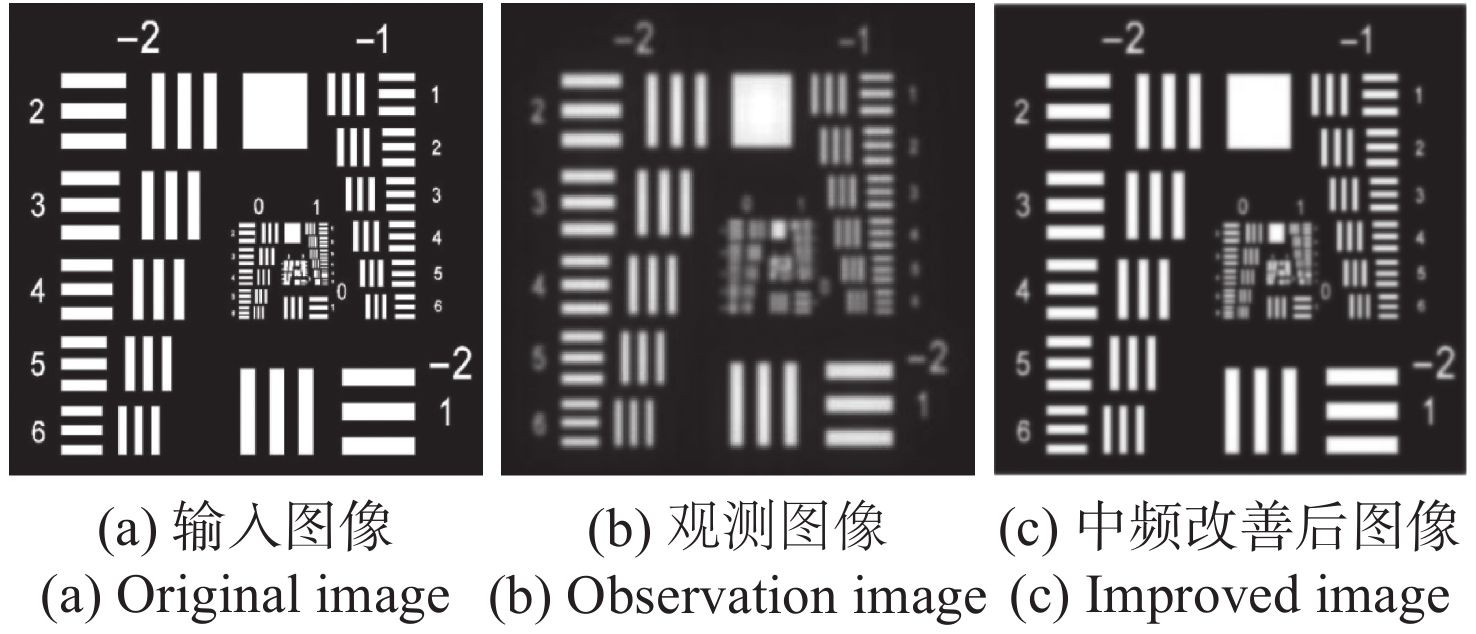
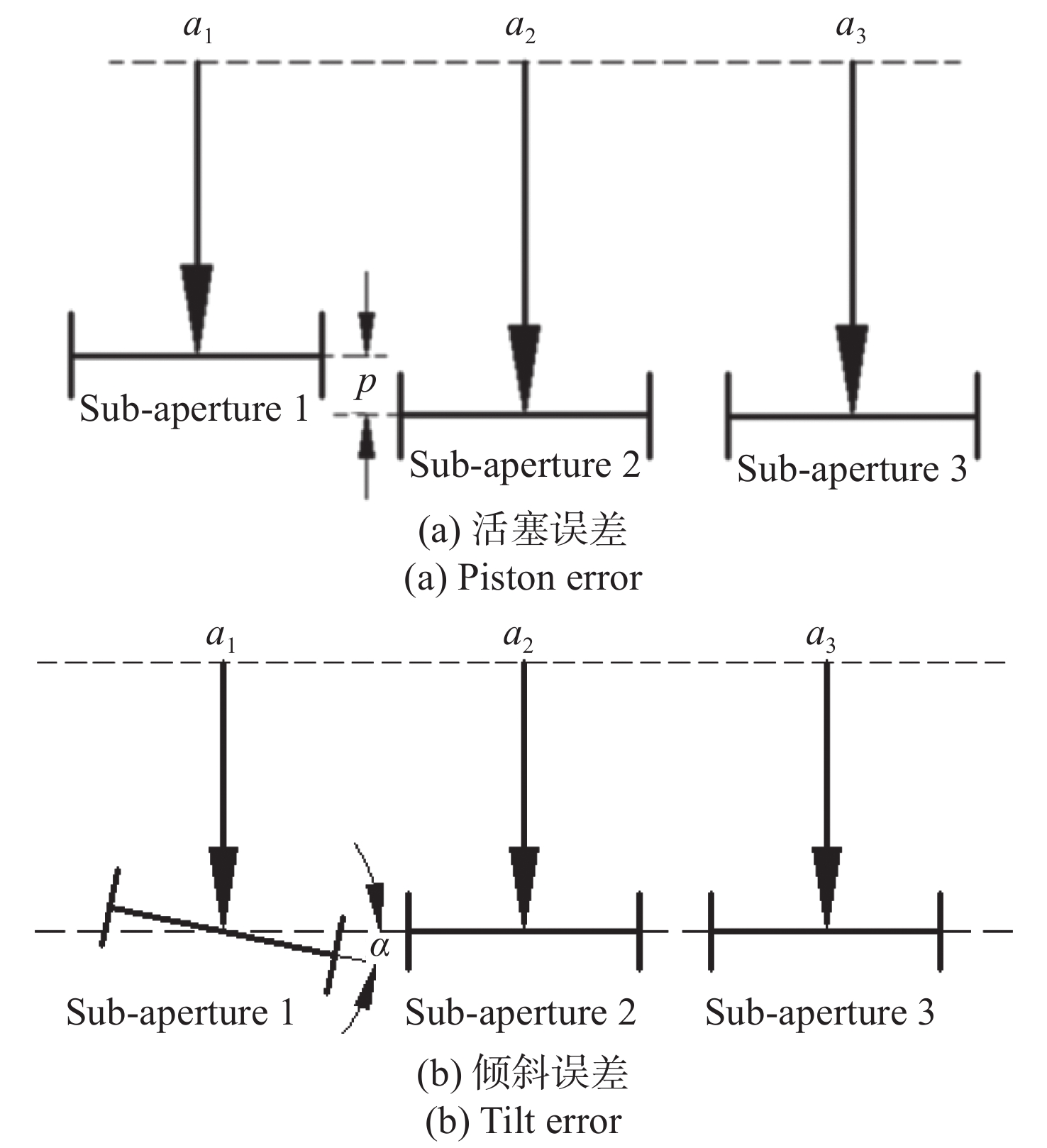
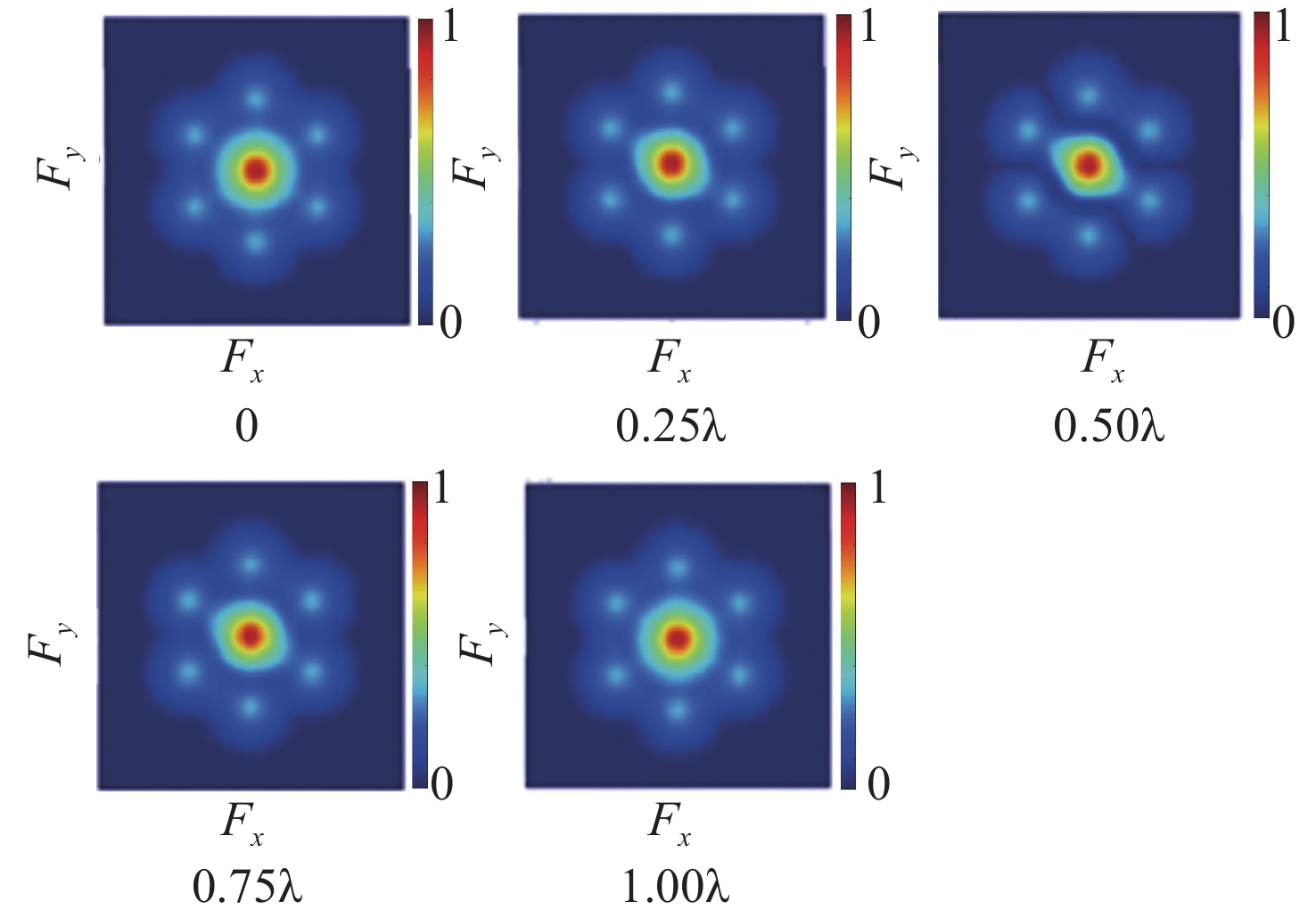
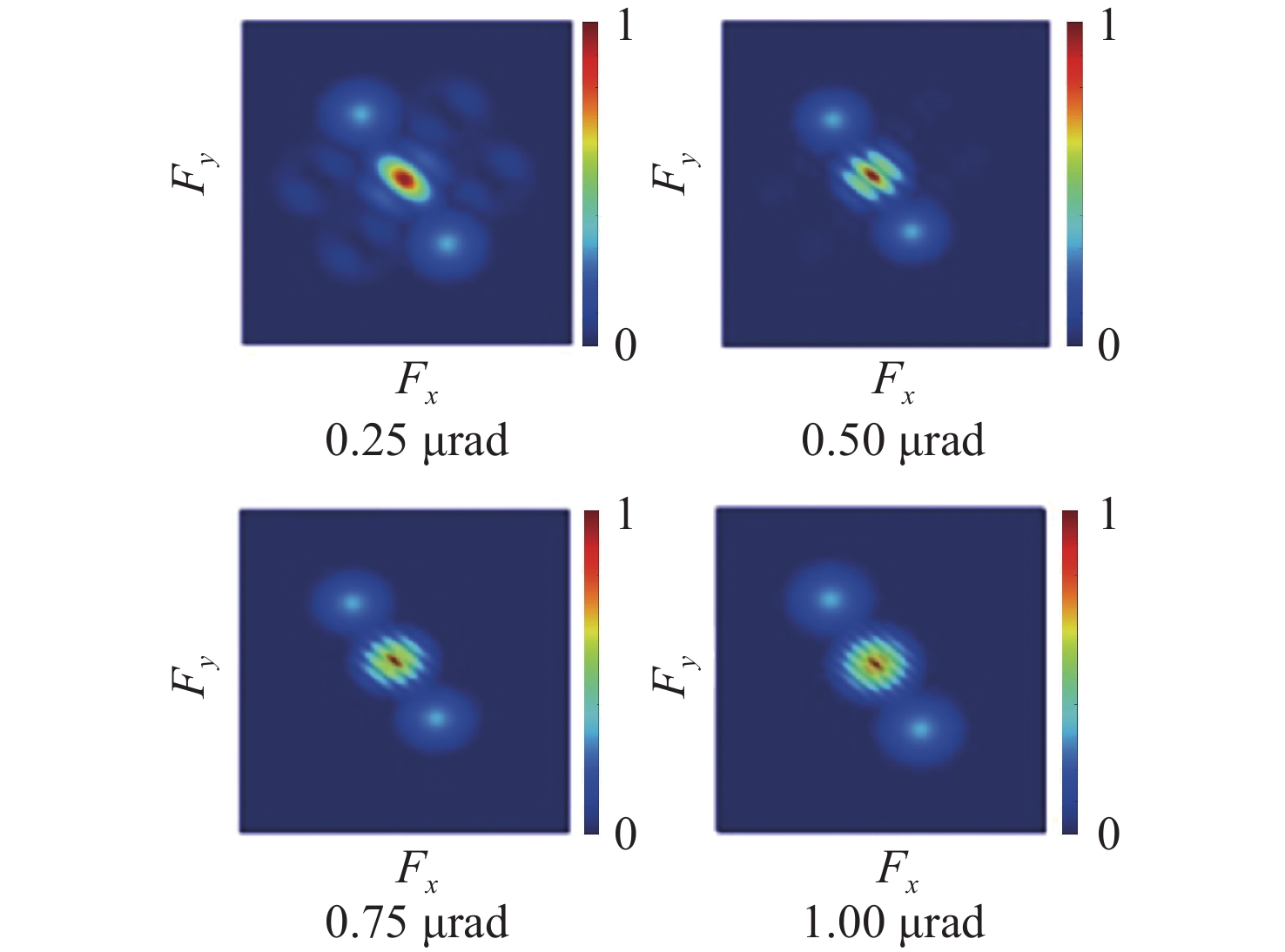
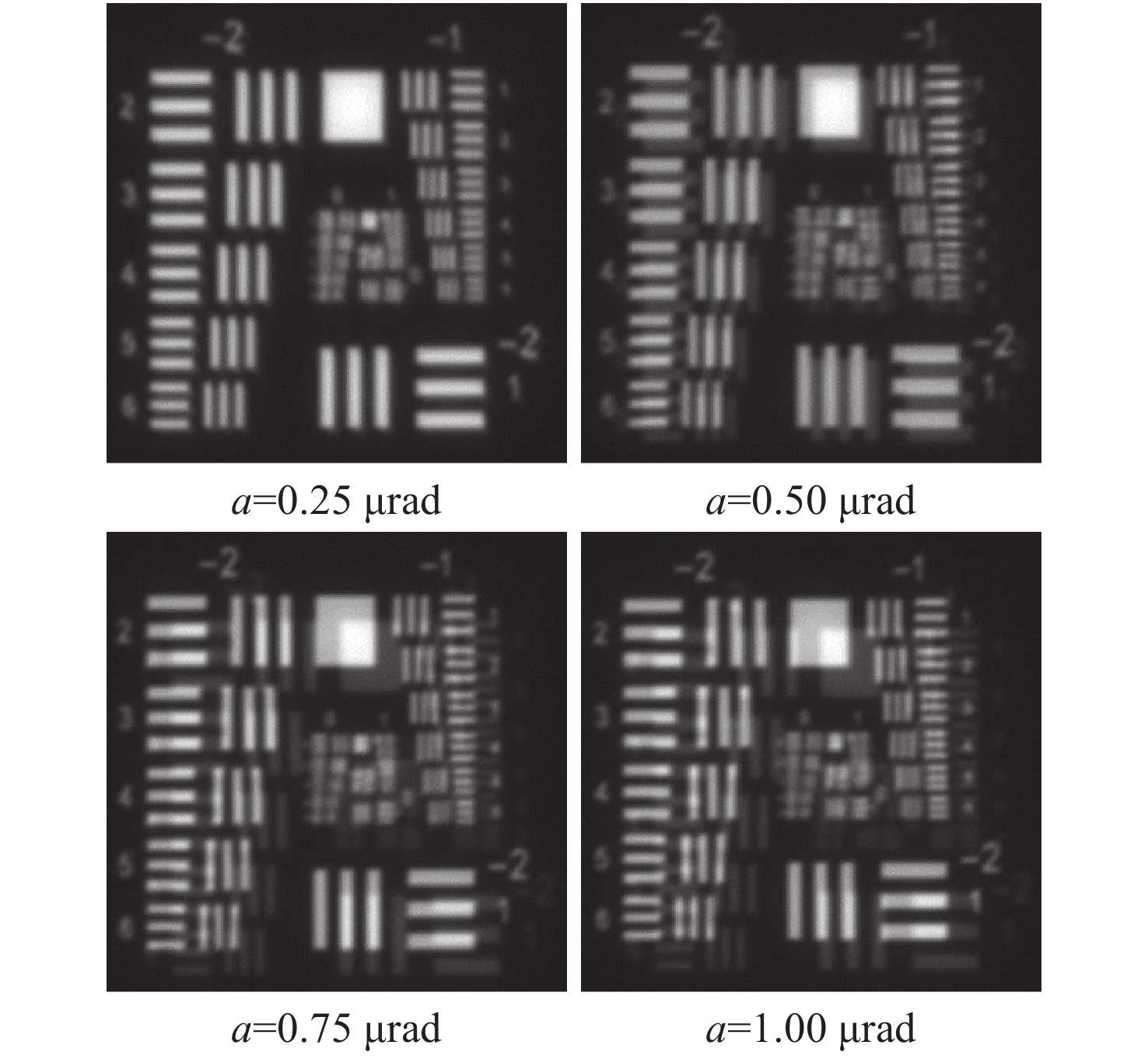
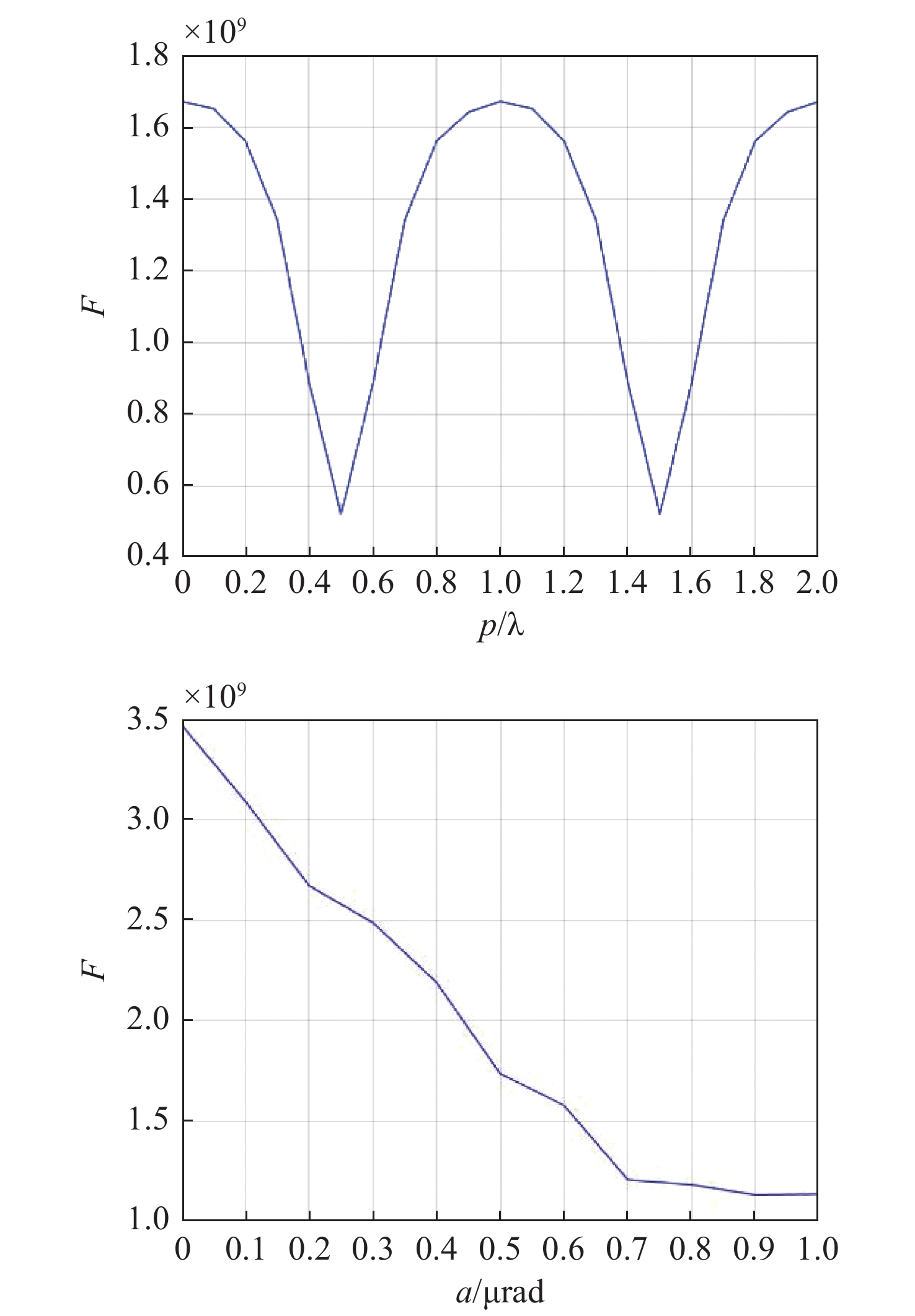
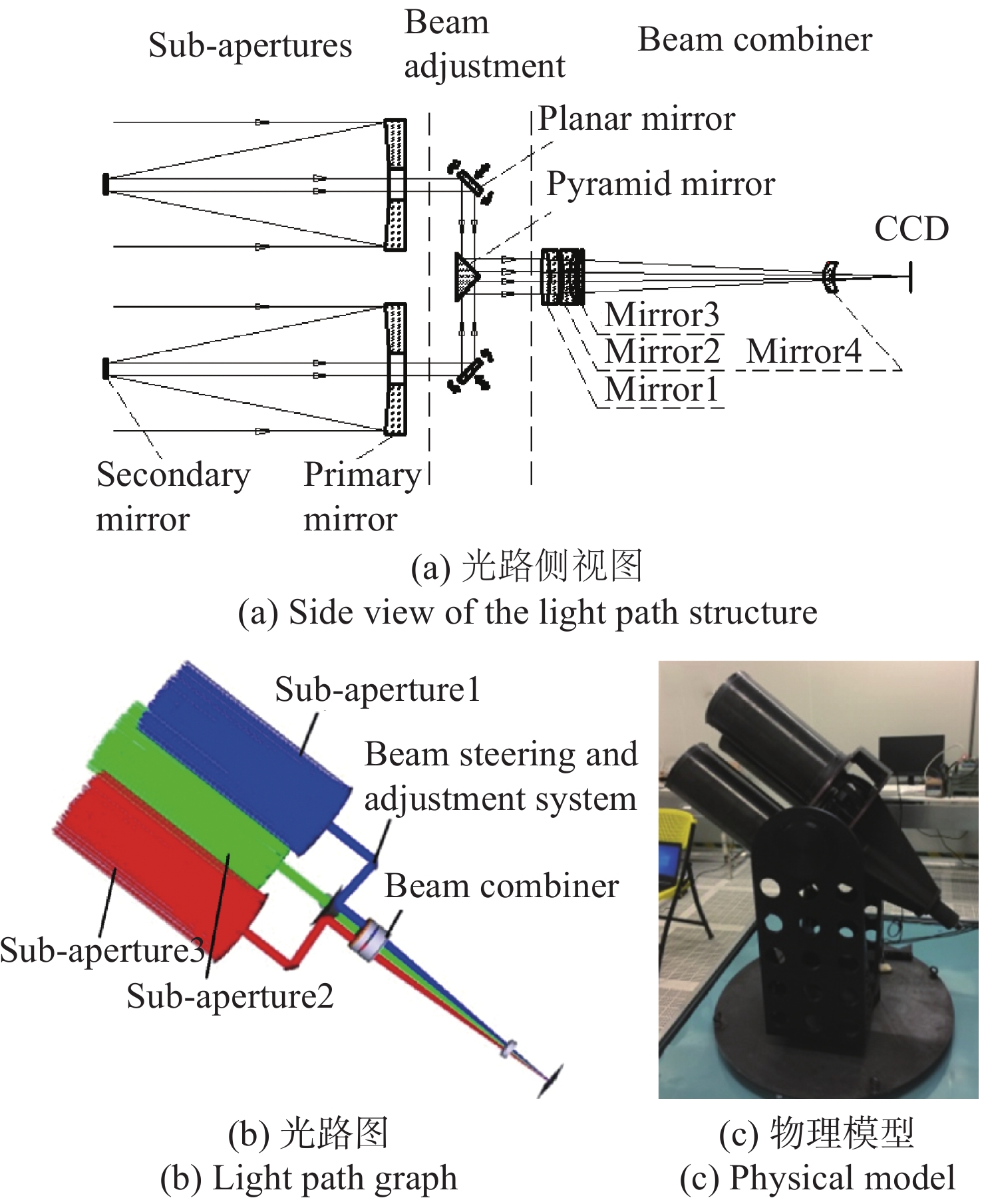
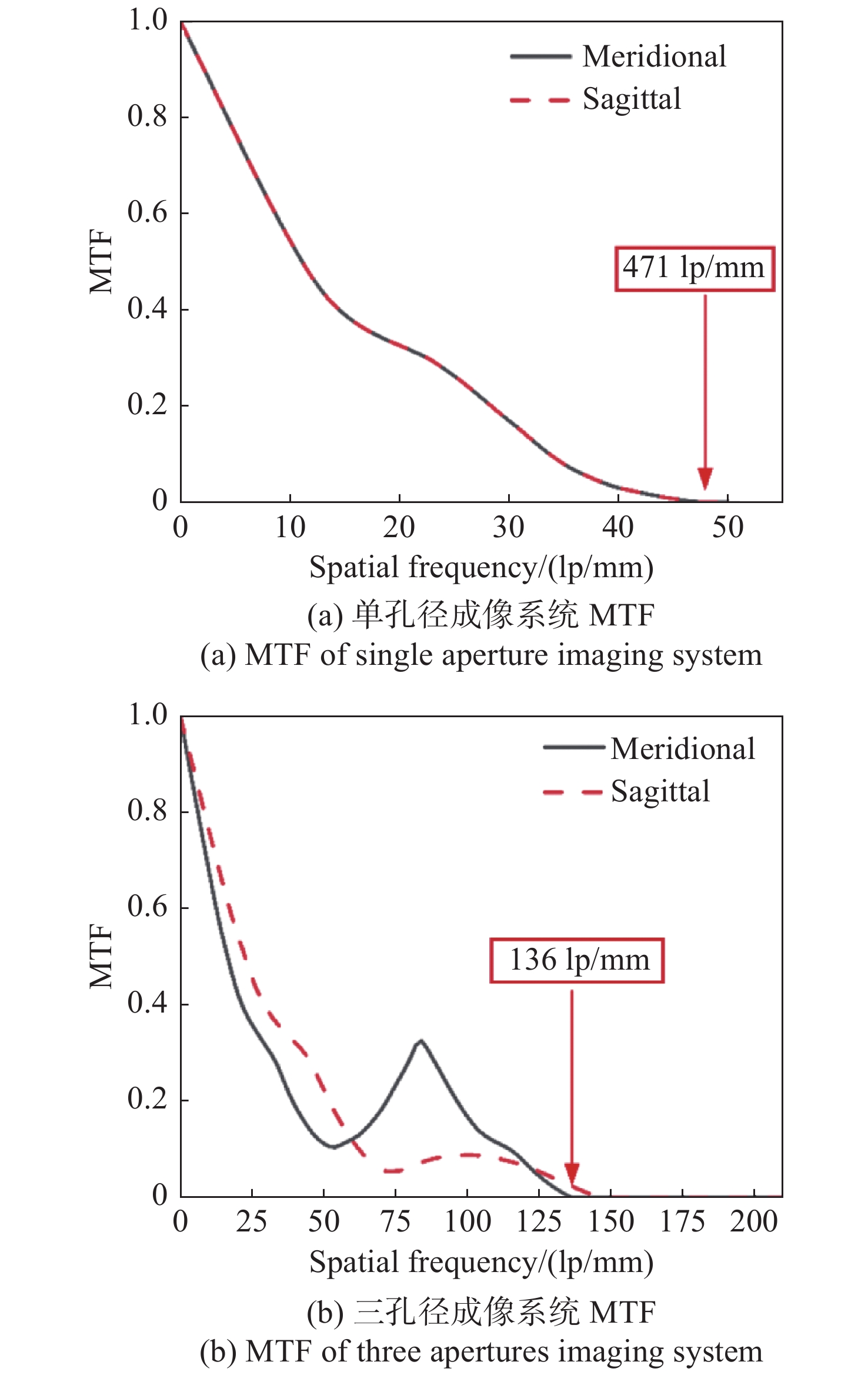
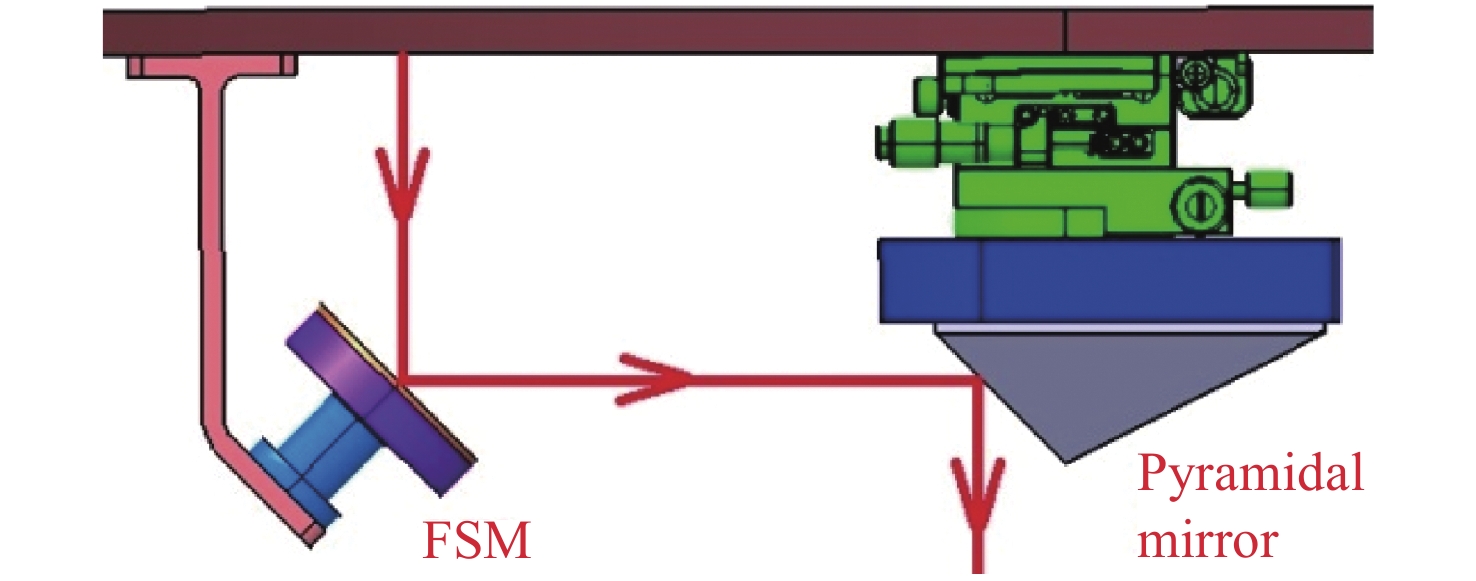
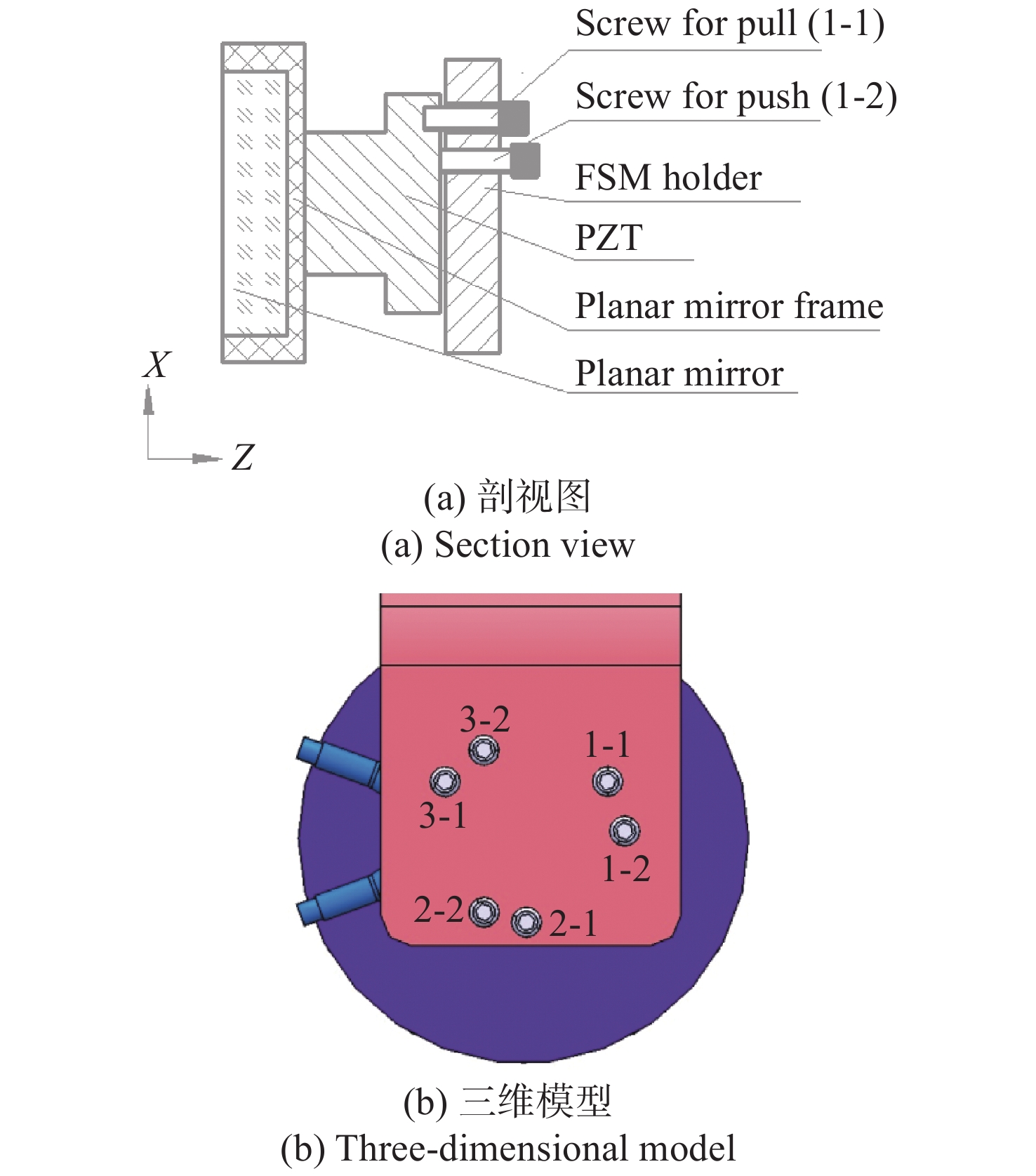
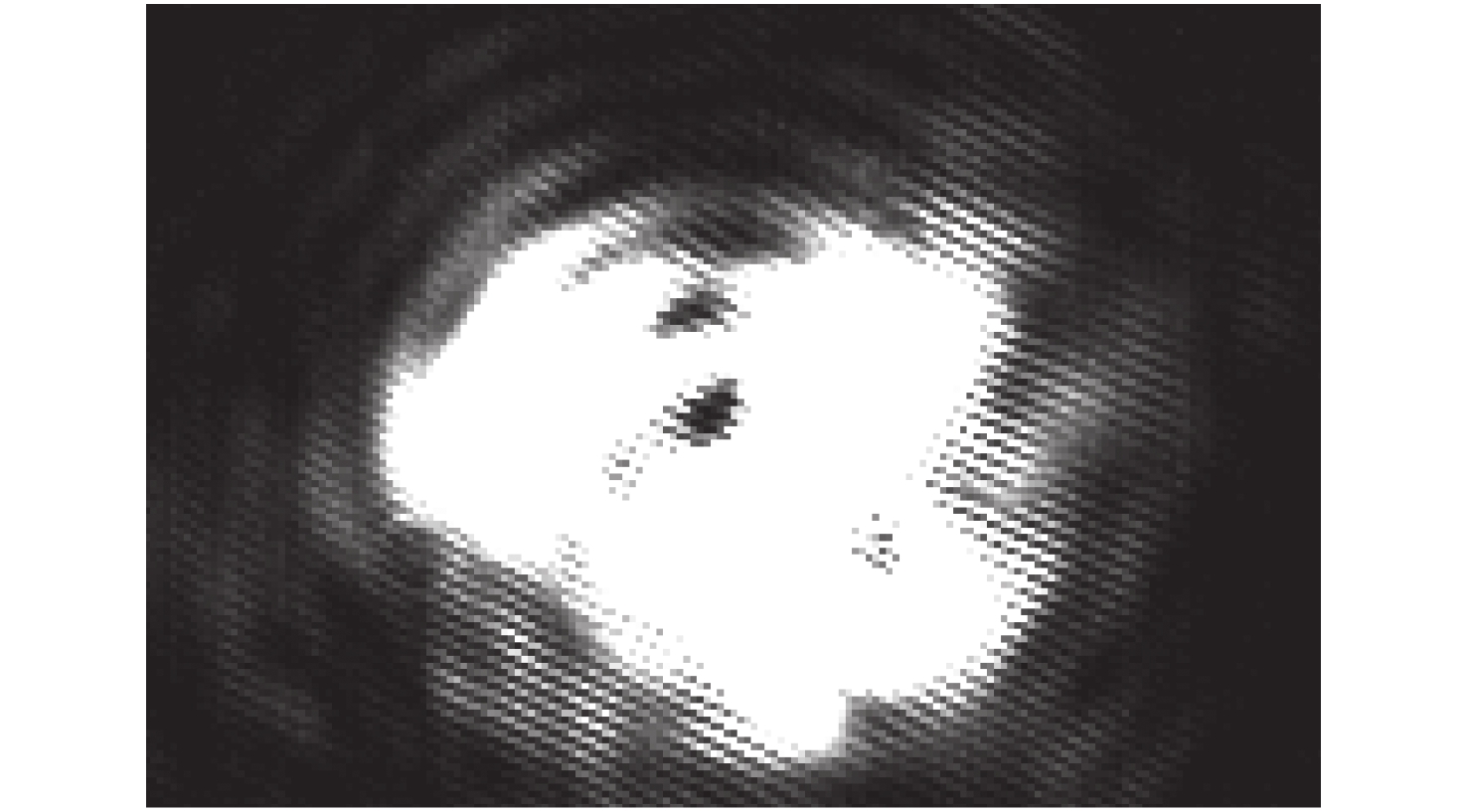
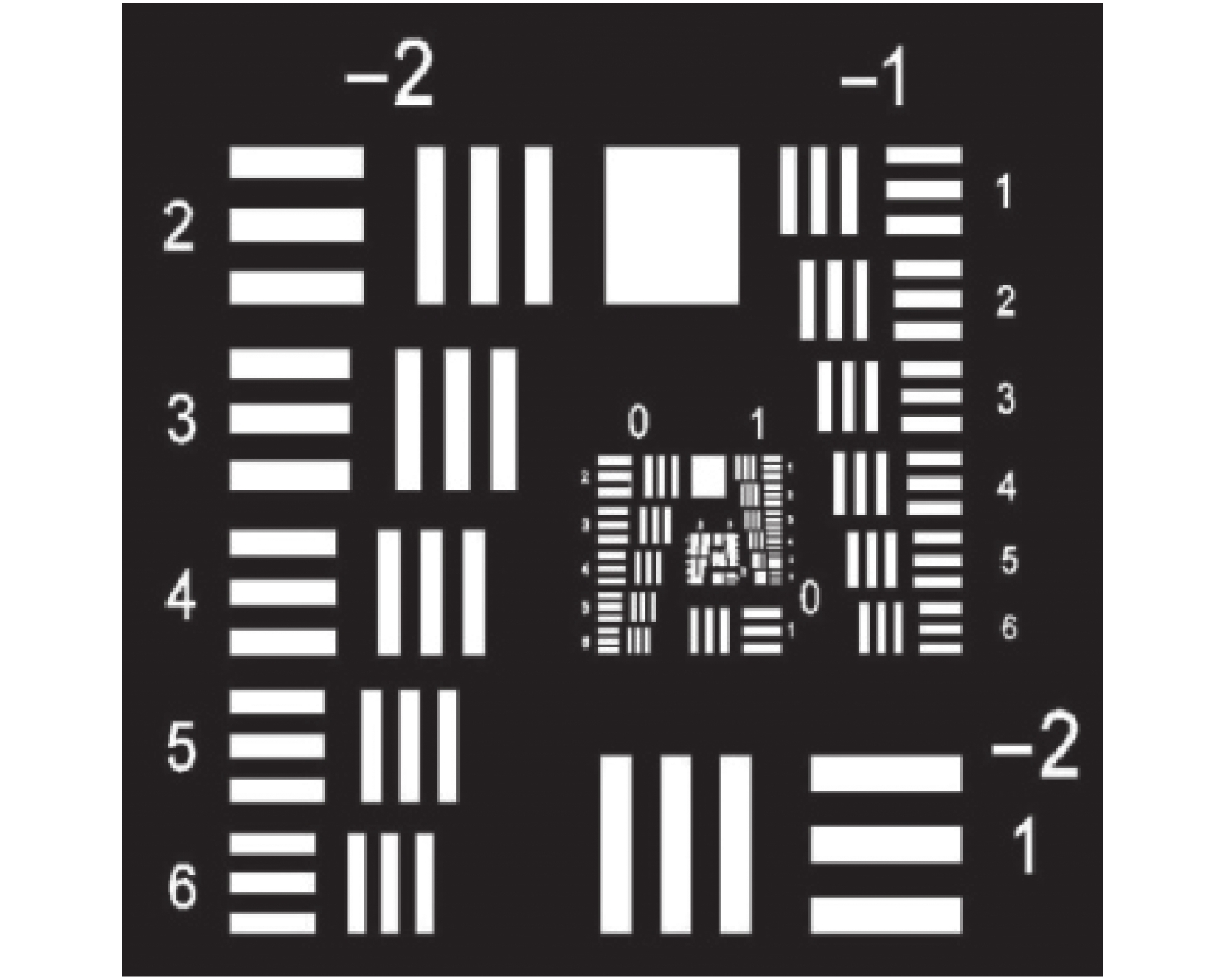
稀疏孔径成像系统在校正共相误差后可实现多个子孔径干涉成像,达到提高成像分辨率的目的。本文以Golay3稀疏孔径成像系统为研究对象,分析了子孔径间存在不同活塞误差和倾斜误差时,系统的MTF和面目标成像情况。研制了一套Golay3稀疏孔径成像系统,以USAF1951分辨率板为面目标进行了成像实验。通过调整光束折转调整模块中的平面反射镜位置,校正了子孔径的活塞误差和倾斜误差,实现了三孔径合成成像,并对理论分析结果进行了验证。实验结果表明:所研制系统的角分辨率为1.77 μrad,接近于等效单口径成像系统的理论极限分辨率1.18 μrad。所研制的Golay3稀疏孔径成像系统能有效校正共相误差,提高成像分辨率。

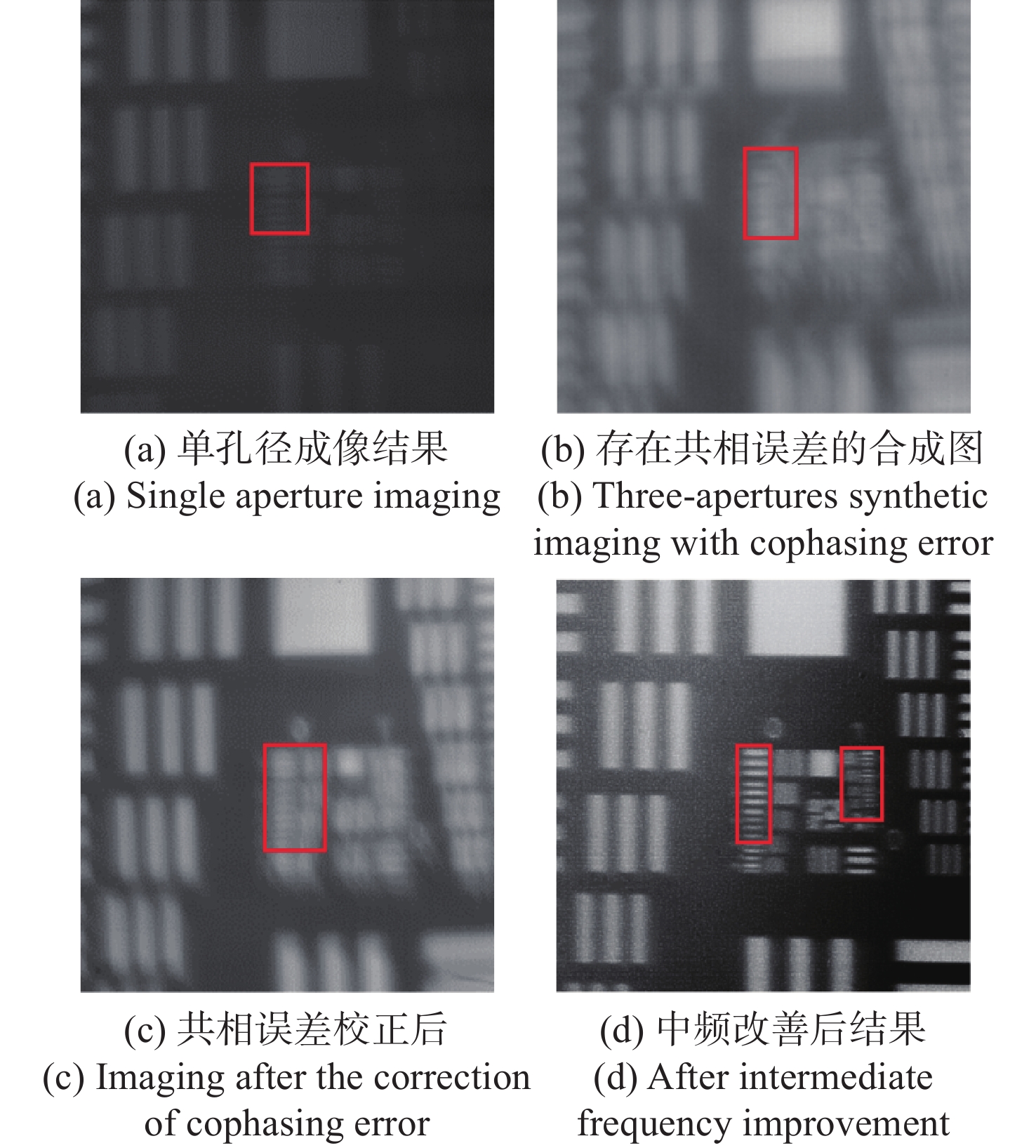
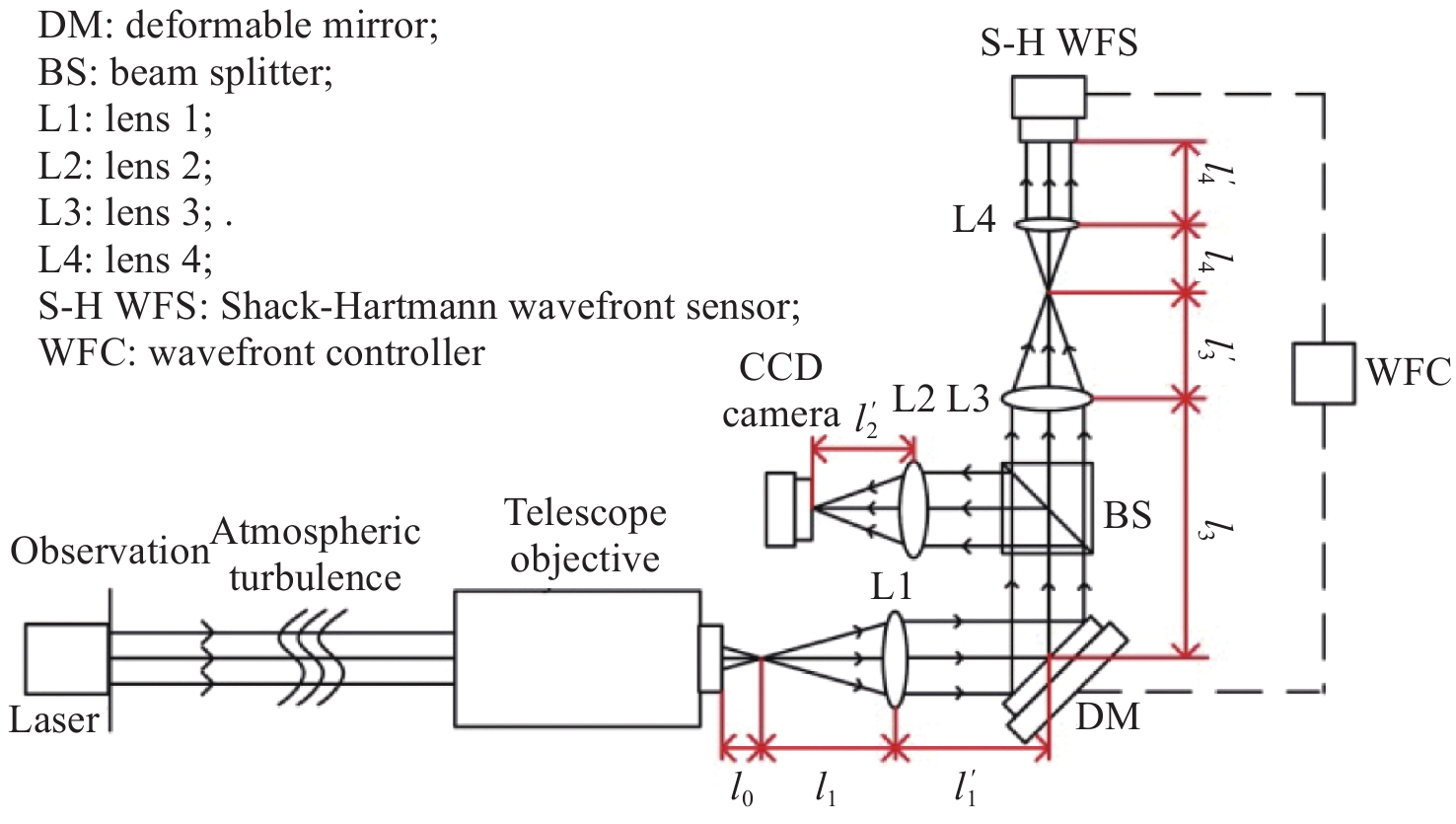
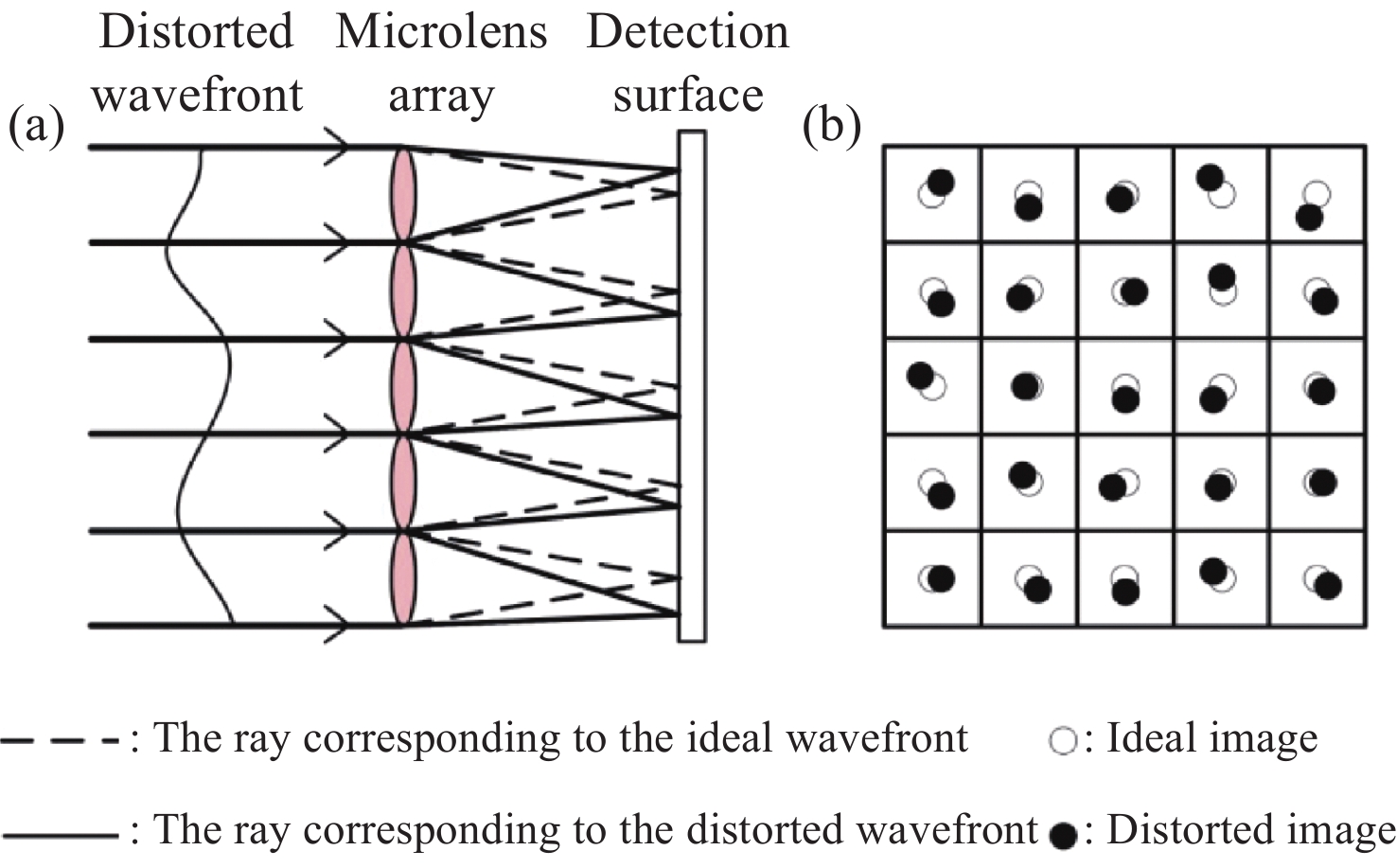
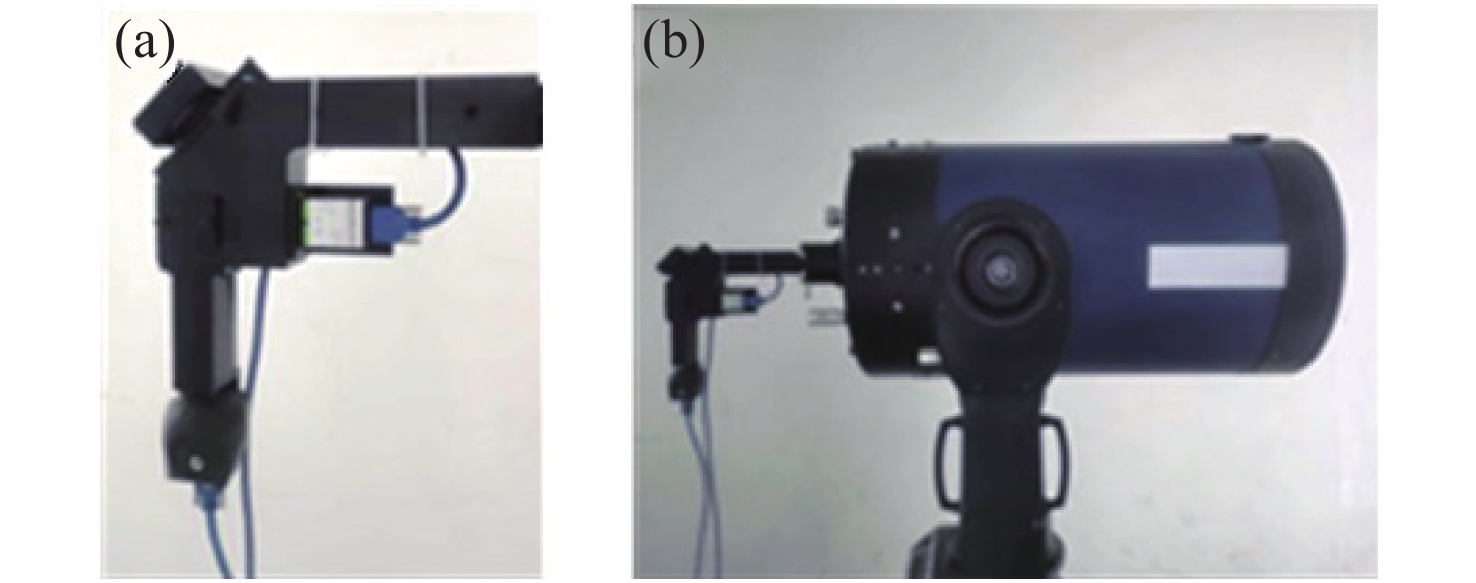
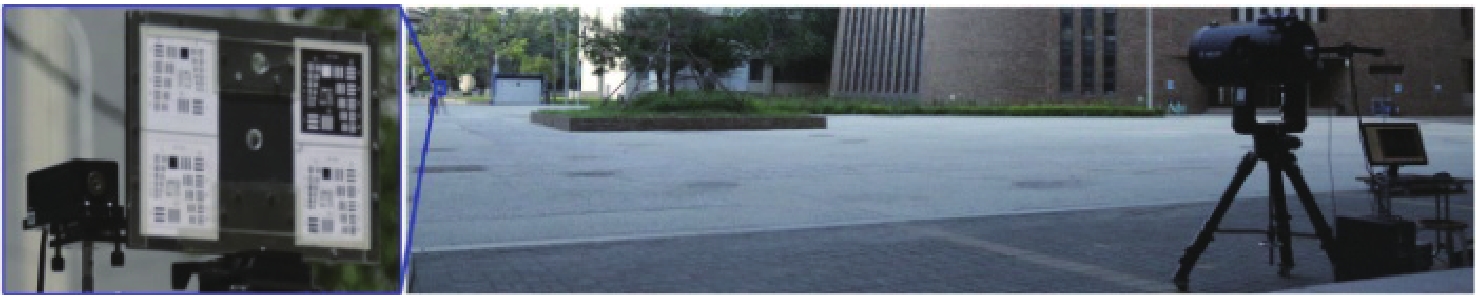
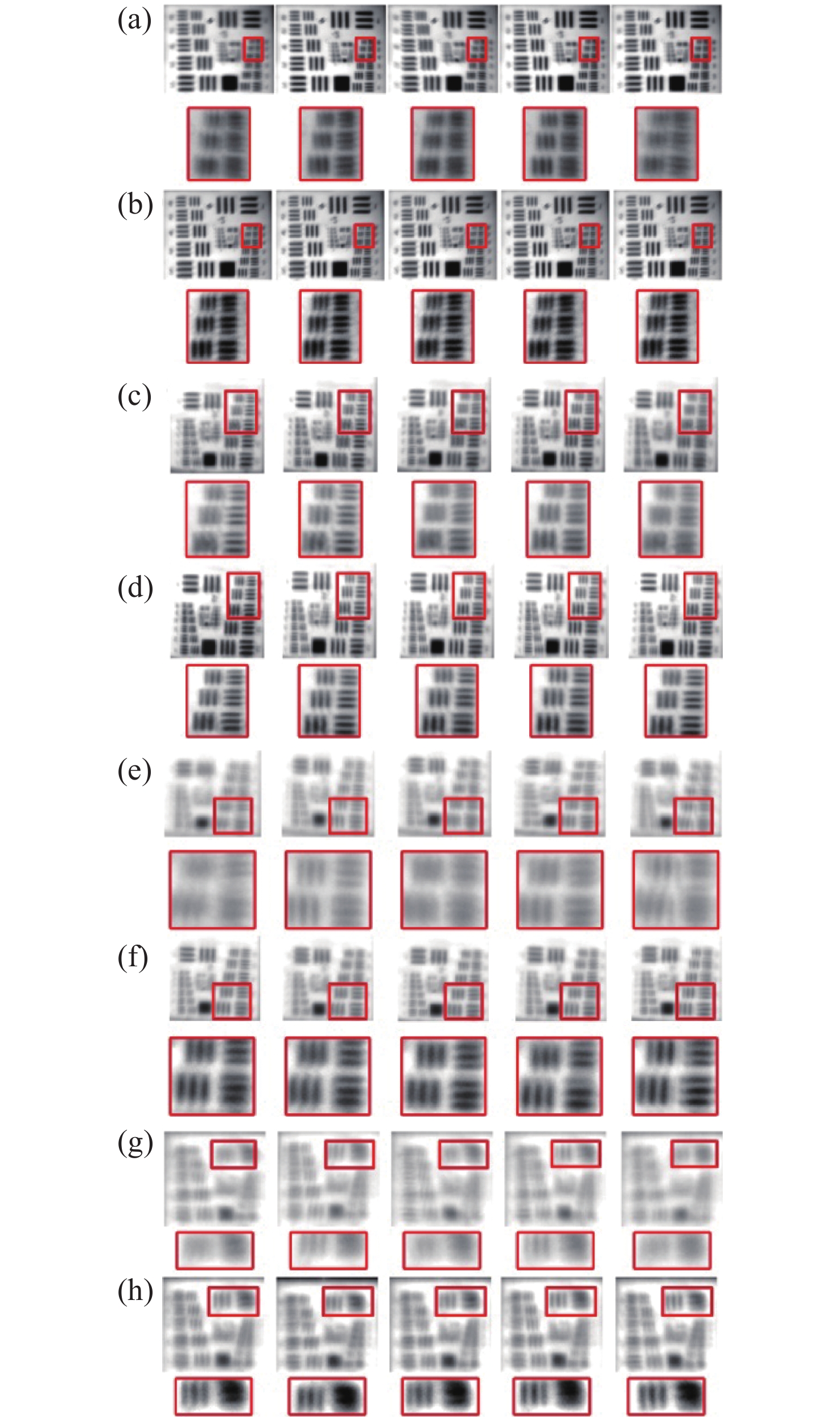
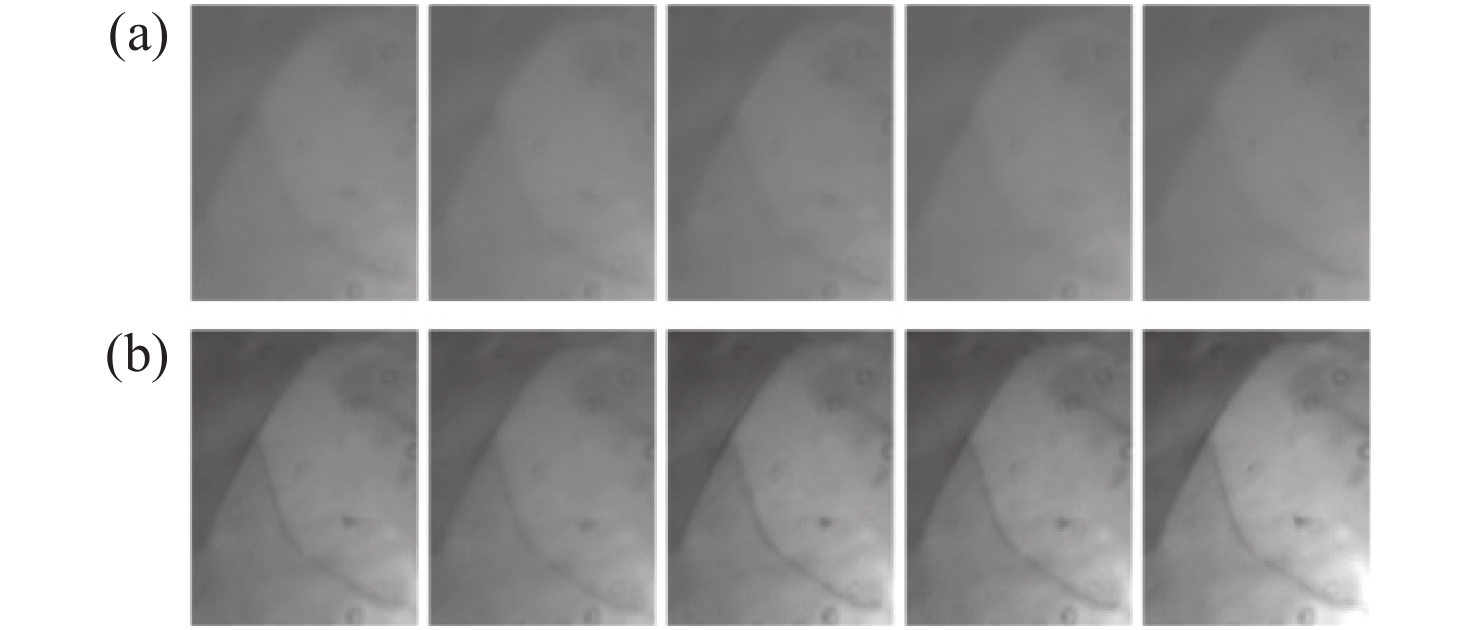
为了克服近地面湍流对几十到几百米中长成像距离下光学系统成像质量的不利影响,设计了基于长焦距望远物镜和一体化自适应模块的光学成像系统。在系统中心高度1.9 m及50~200 m的成像距离下,开展了分辨率板的室外成像实验。实验结果表明,在近地面的50~200 m中长距离下湍流对成像质量的影响明显,所搭建的实验系统能够在不同距离下有效克服湍流影响,提高图像的分辨率和清晰度的一致性,但随着成像距离的增加,湍流影响的增大,系统的校正能力降低,成像质量下降。系统在100 m成像距离下的成像分辨率能够达到0.5 mm。在200 m的距离对混凝土模型表面裂缝进行了观测及校正实验,实验结果表明,系统能够抑制湍流影响,提高裂缝图像的清晰度,验证了系统的实际应用能力。



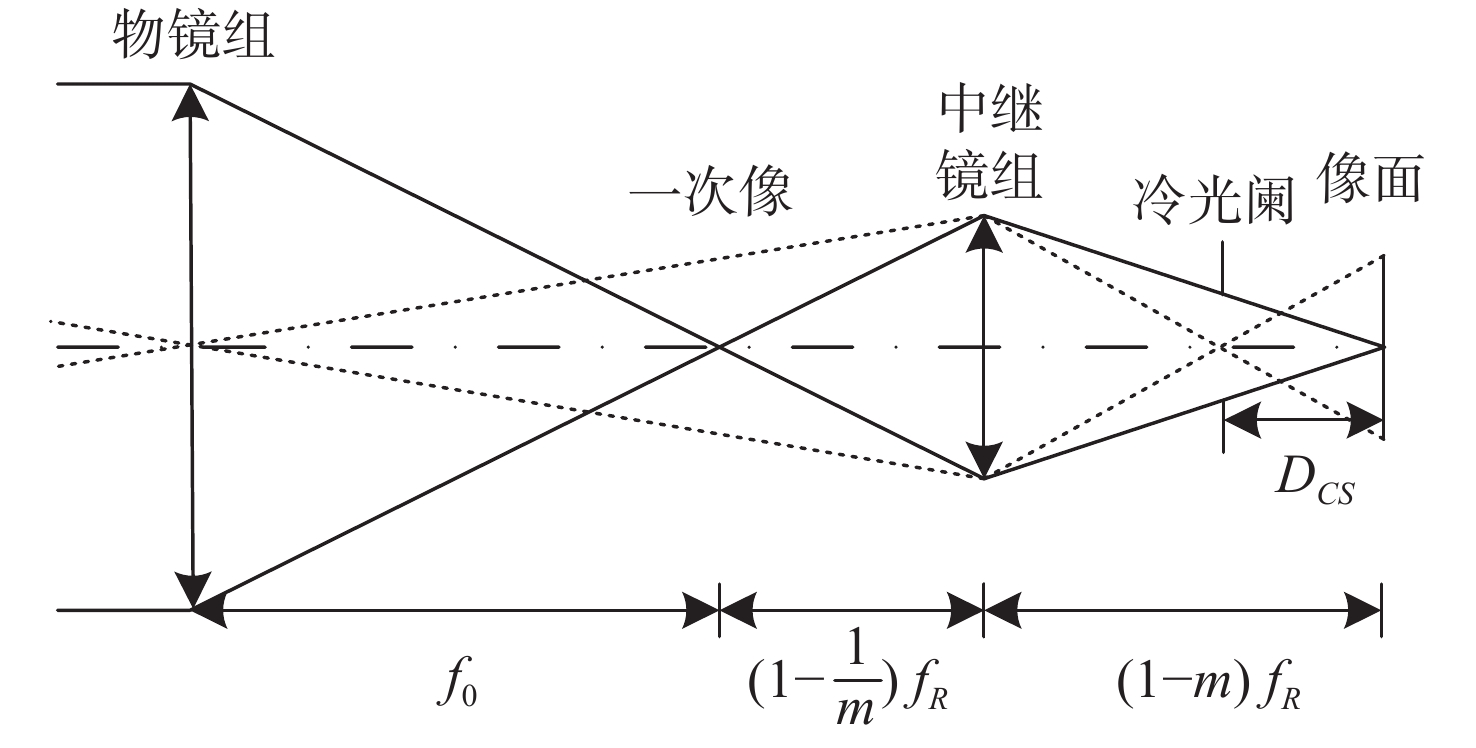
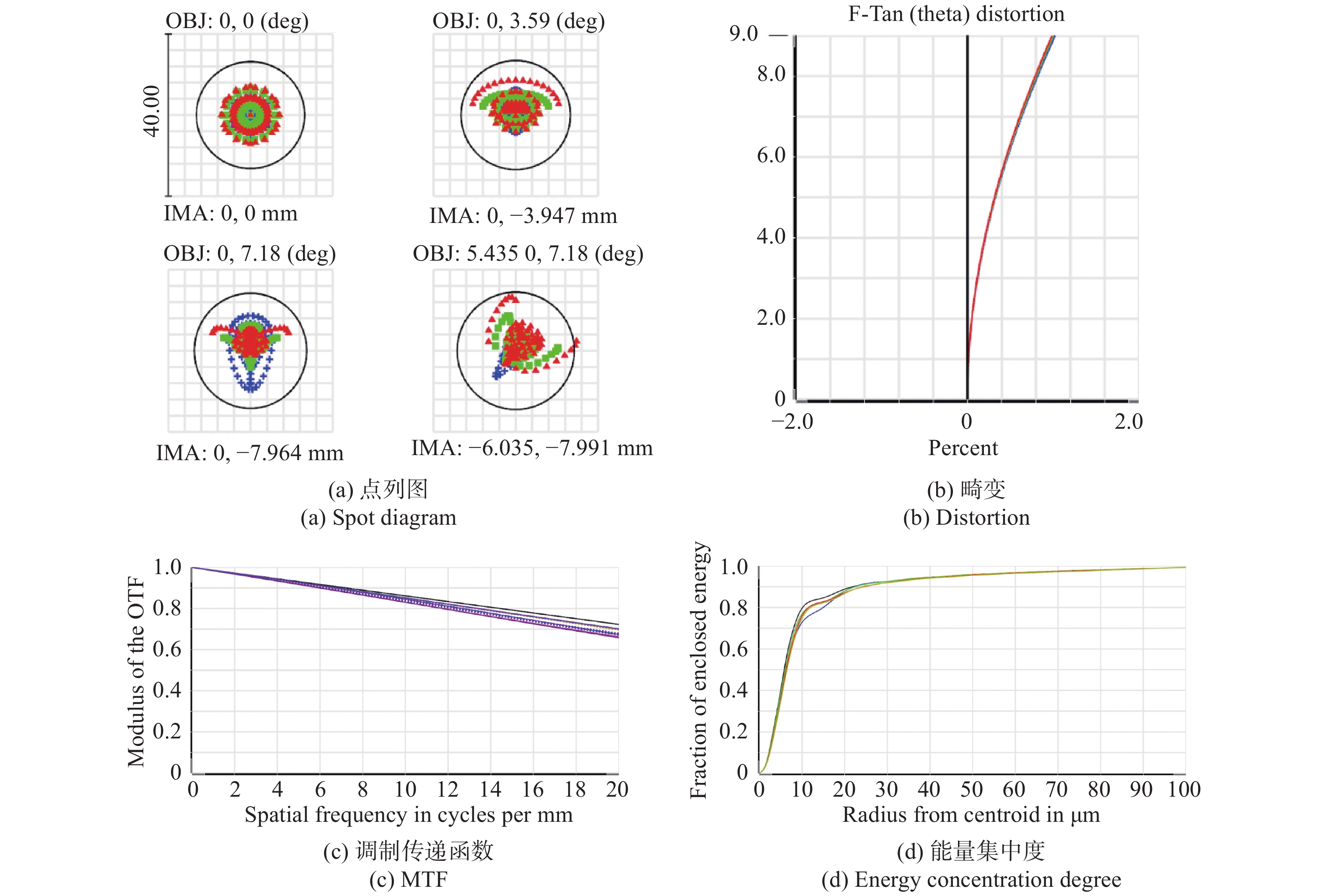
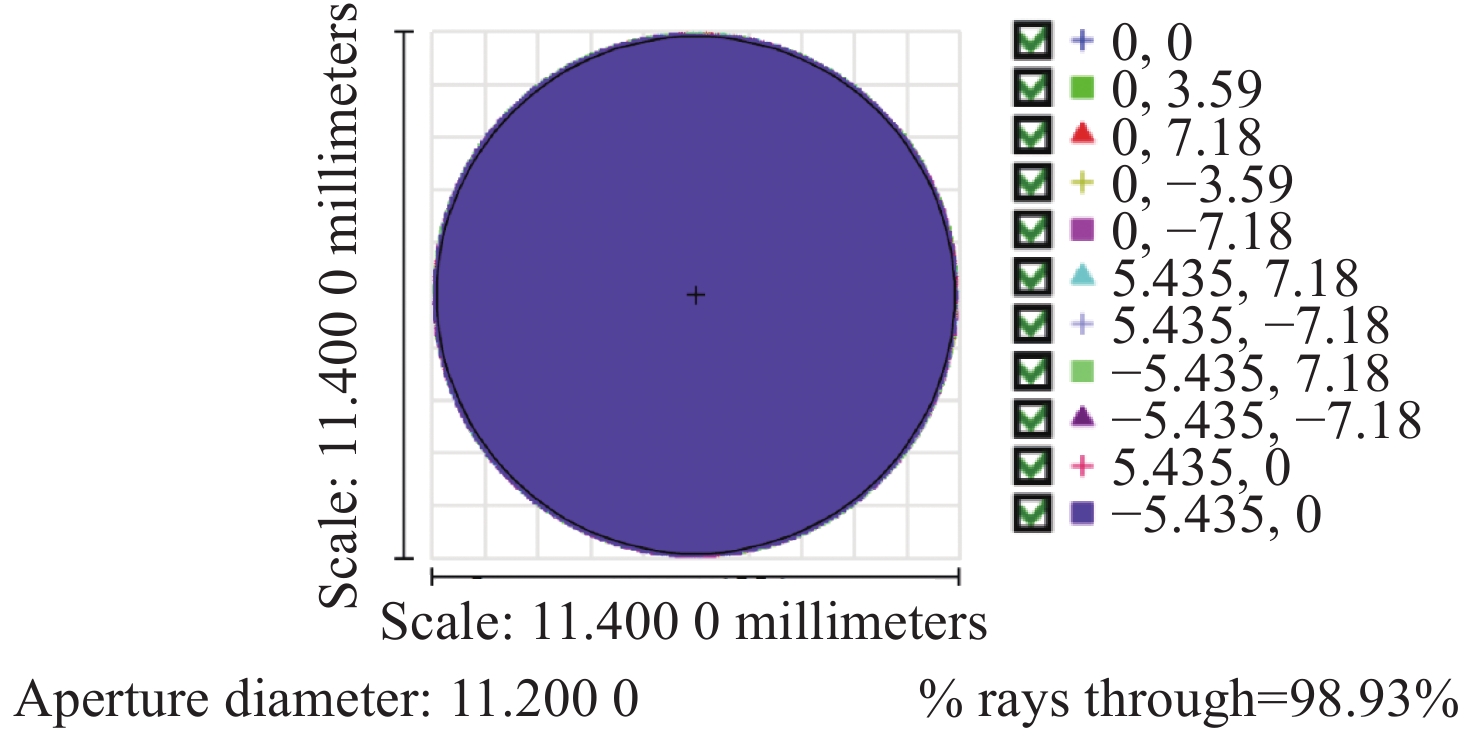
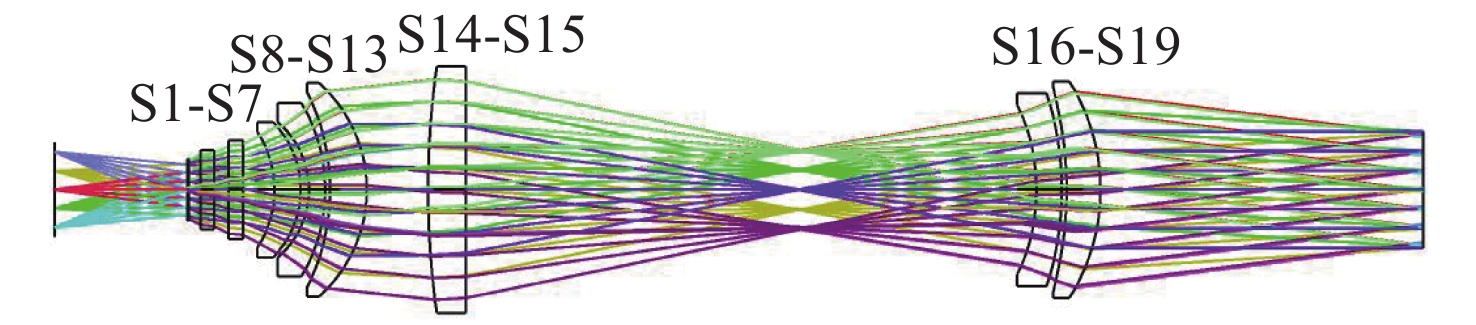
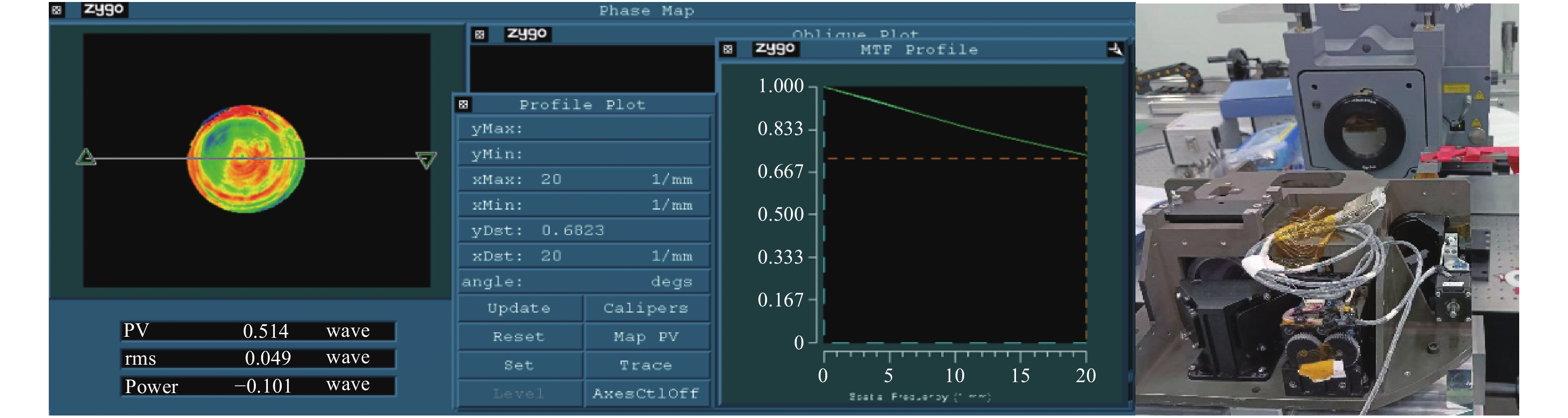
在大温差条件下,由于温度剧烈变化导致红外光学系统成像质量变差。用于机载林火监测的大视场中波红外相机工作环境变化剧烈,对杂散辐射要求较高。为保证光学系统在要求的大视场和大温差条件下具有稳定的性能和良好的成像质量,通过基于消热差的设计方法和基于噪声等效温差的杂散辐射综合评价方法,设计了一套制冷型中波红外光学系统。该光学系统由6片透镜和1片滤光片组成,工作波段为3.7~4.8 μm,F数为2.5,焦距为62.5 mm,视场为14.36°×10.87°,探测器采用640×512 阵列中波制冷型探测器,通过采用硅、锗材料组合,合理分配光焦度,实现了消色差和消热差设计,通过冷反射优化和冷光阑匹配设计,较好地抑制了系统的杂散辐射噪声,通过引入少量非球面优化,在满足指标要求的情况下,对高阶像差进行了校正。结果表明,光学系统在−55~+70 °C温度范围内,成像质量稳定良好。



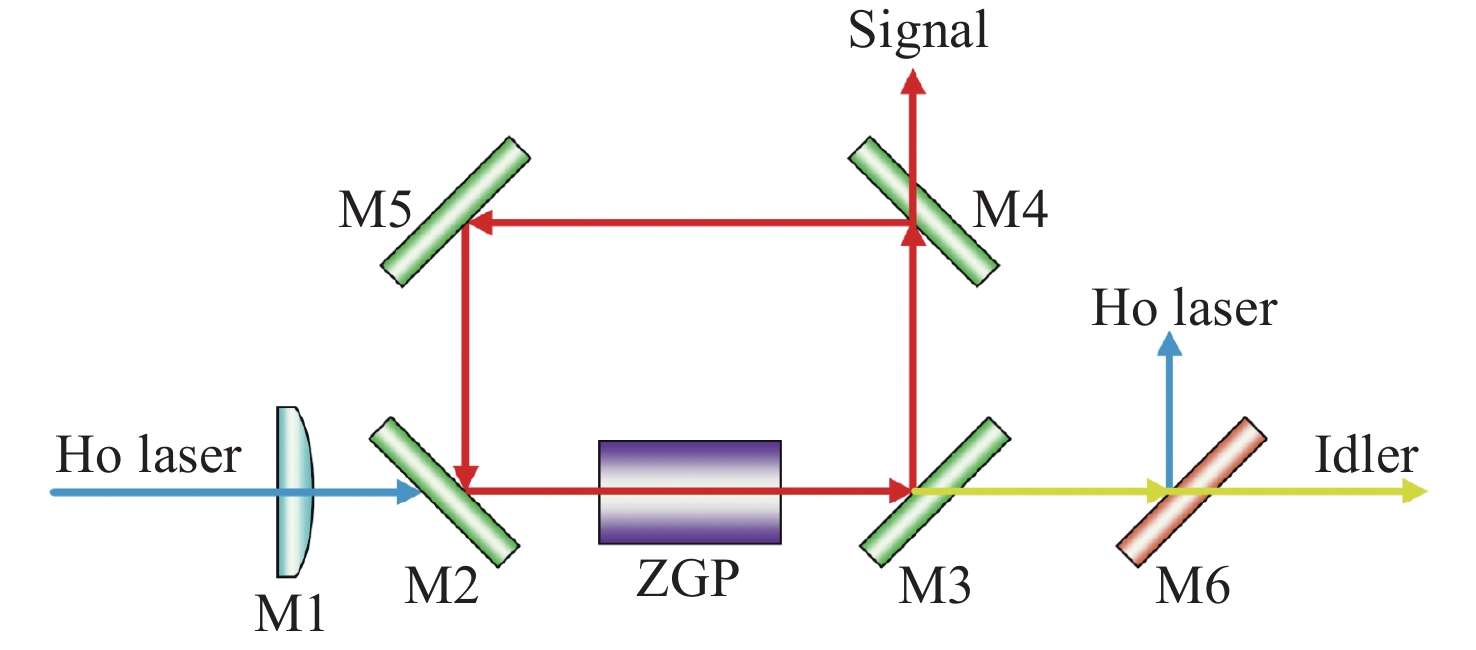
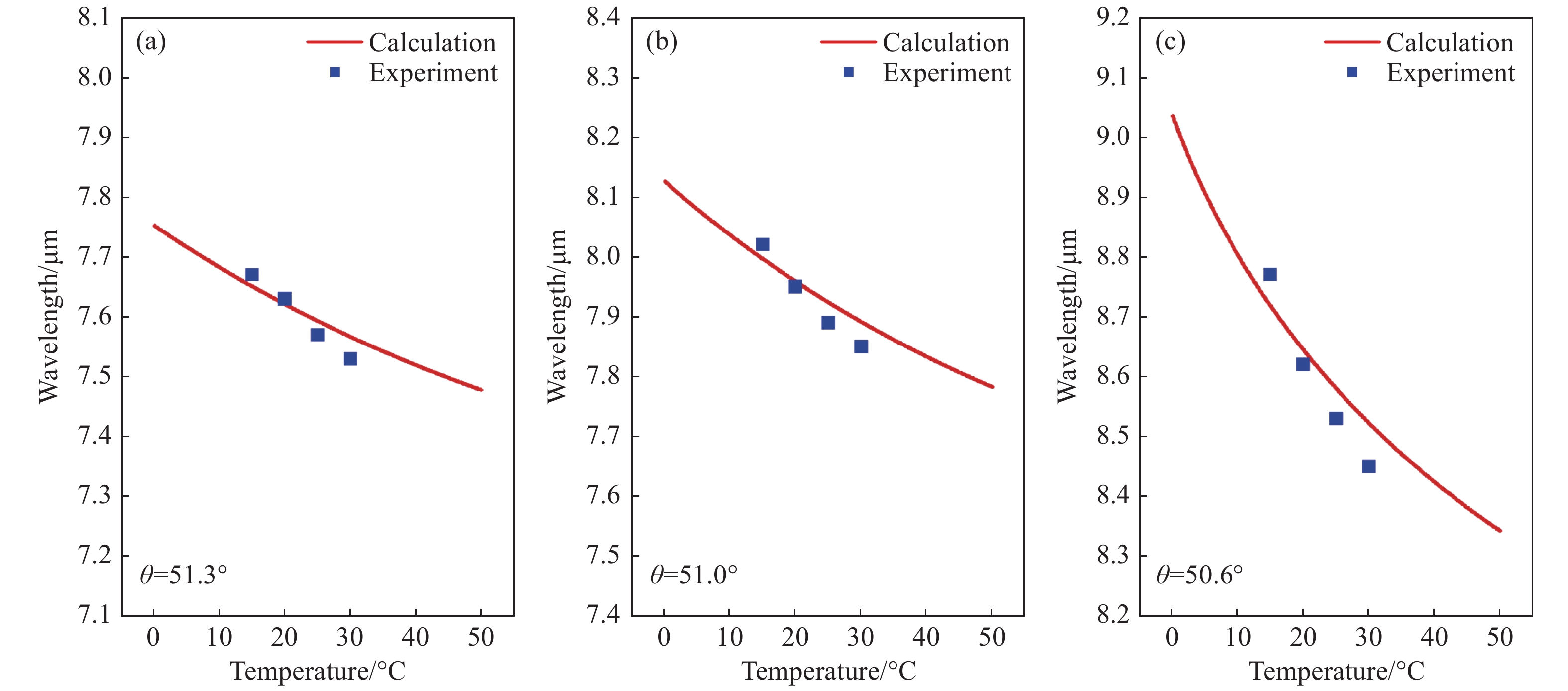
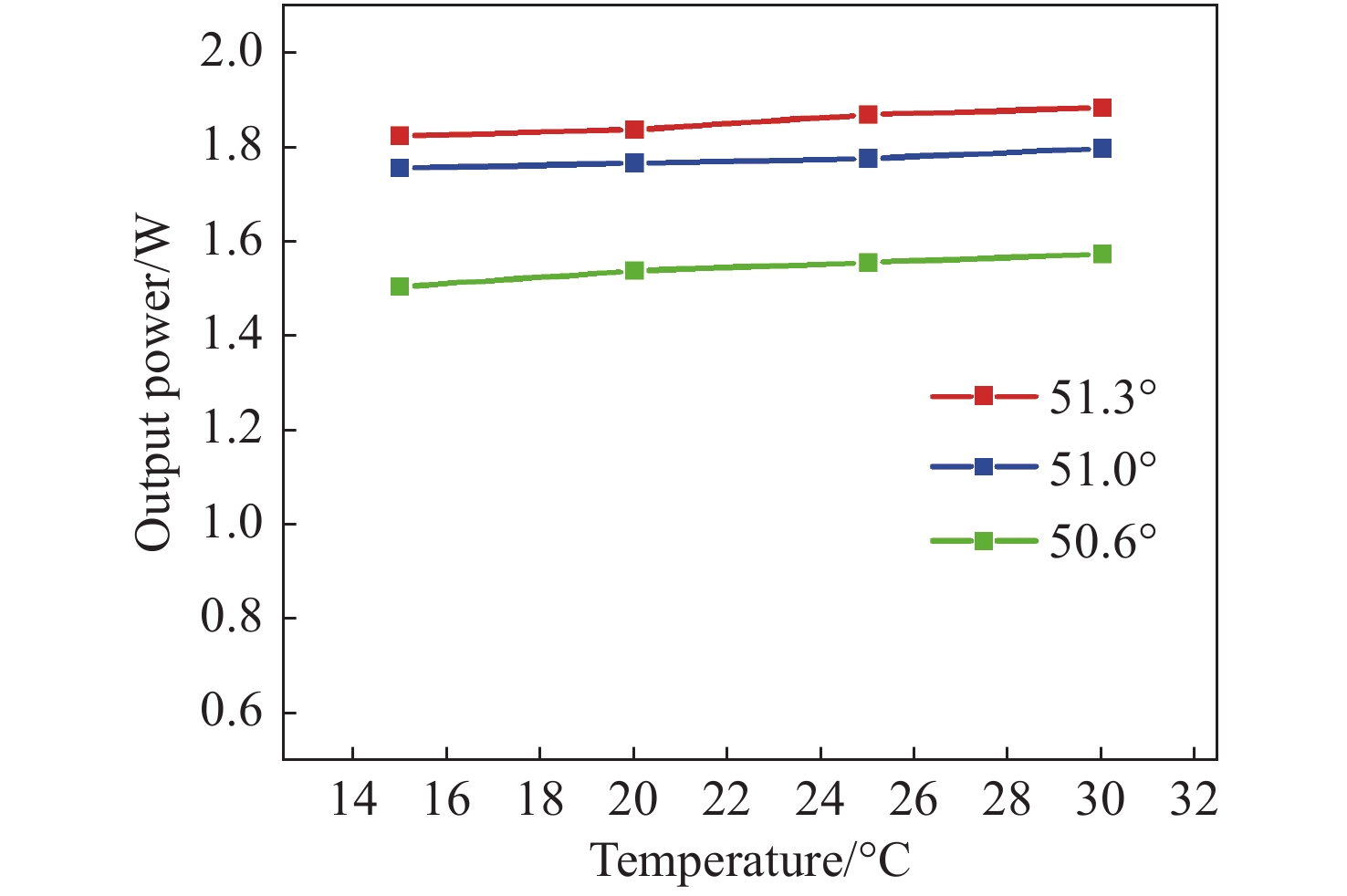
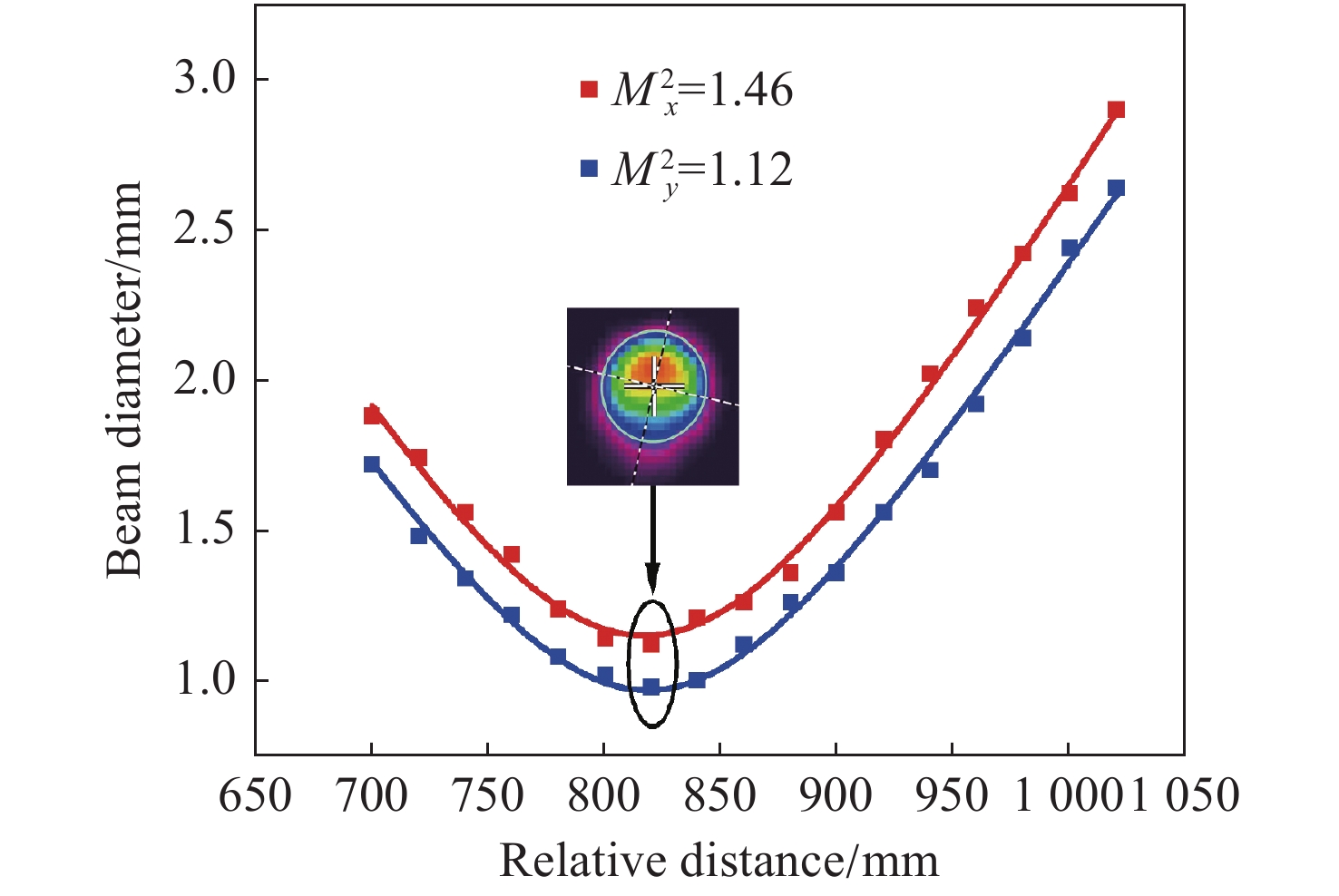
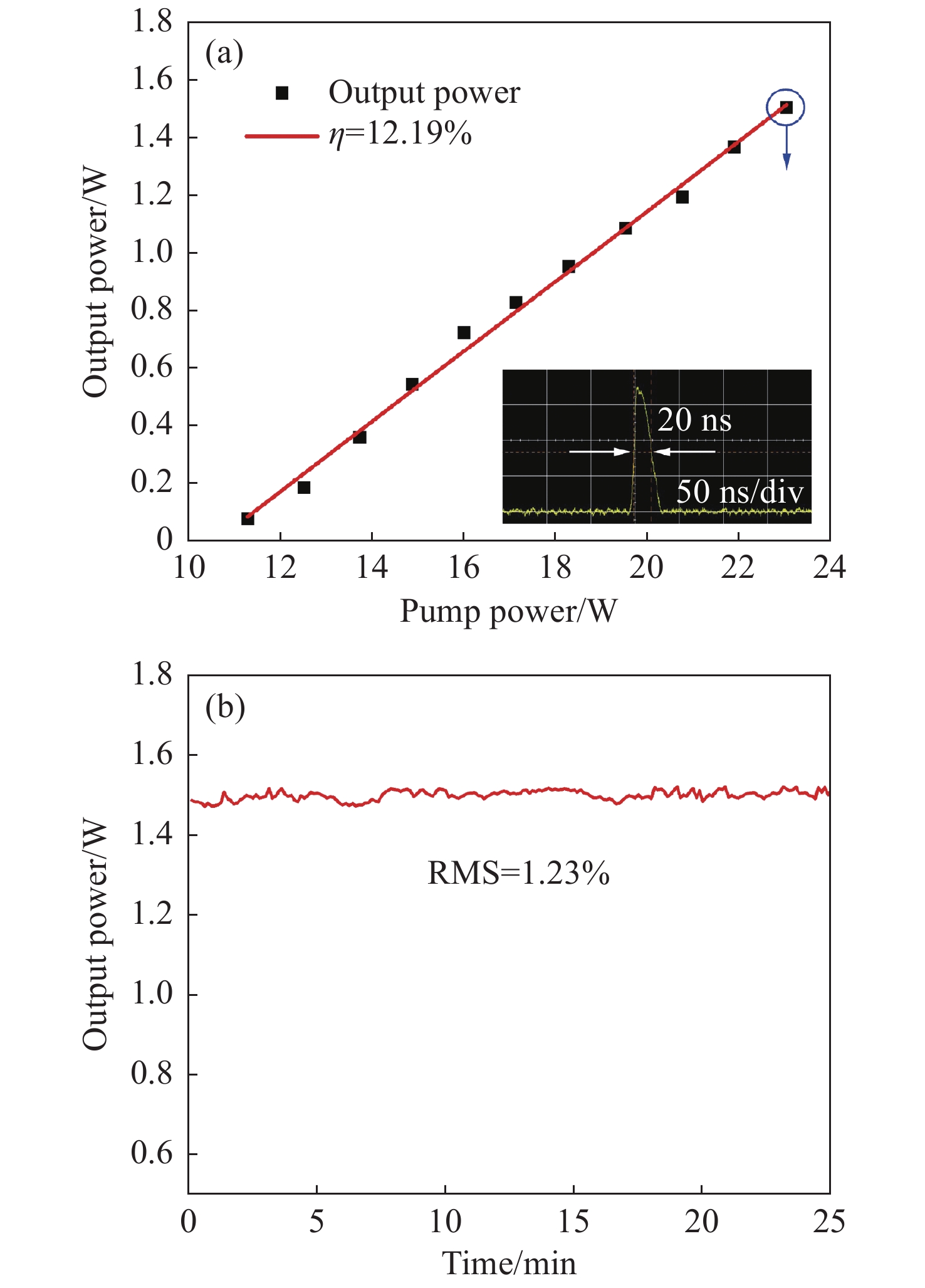
为了获得可调谐长波红外激光输出,本文设计了一种基于ZnGeP2(ZGP)温度调谐的长波红外光参量振荡器。采用中心波长为2097 nm的Ho:YAG激光器泵浦不同相位匹配角的ZGP晶体,通过改变晶体工作温度来研究ZnGeP2光参量振荡器(ZGP-OPO)的温度调谐特性。在15~30 °C温度范围内,实现了7.53~8.77 μm分段可调谐长波激光输出,总调谐宽度为1.24 μm。整个调谐范围内,输出功率大于1.503 W,当闲频光波长为8.77 μm时,输出功率为1.503 W,斜率效率和光光转换效率分别为12.19%和6.53%。实验结果表明,ZGP温度调谐是实现连续可调谐长波红外激光输出的有效技术途径。本实验研究在可调谐长波固体激光器工程化领域具有潜在的应用价值。


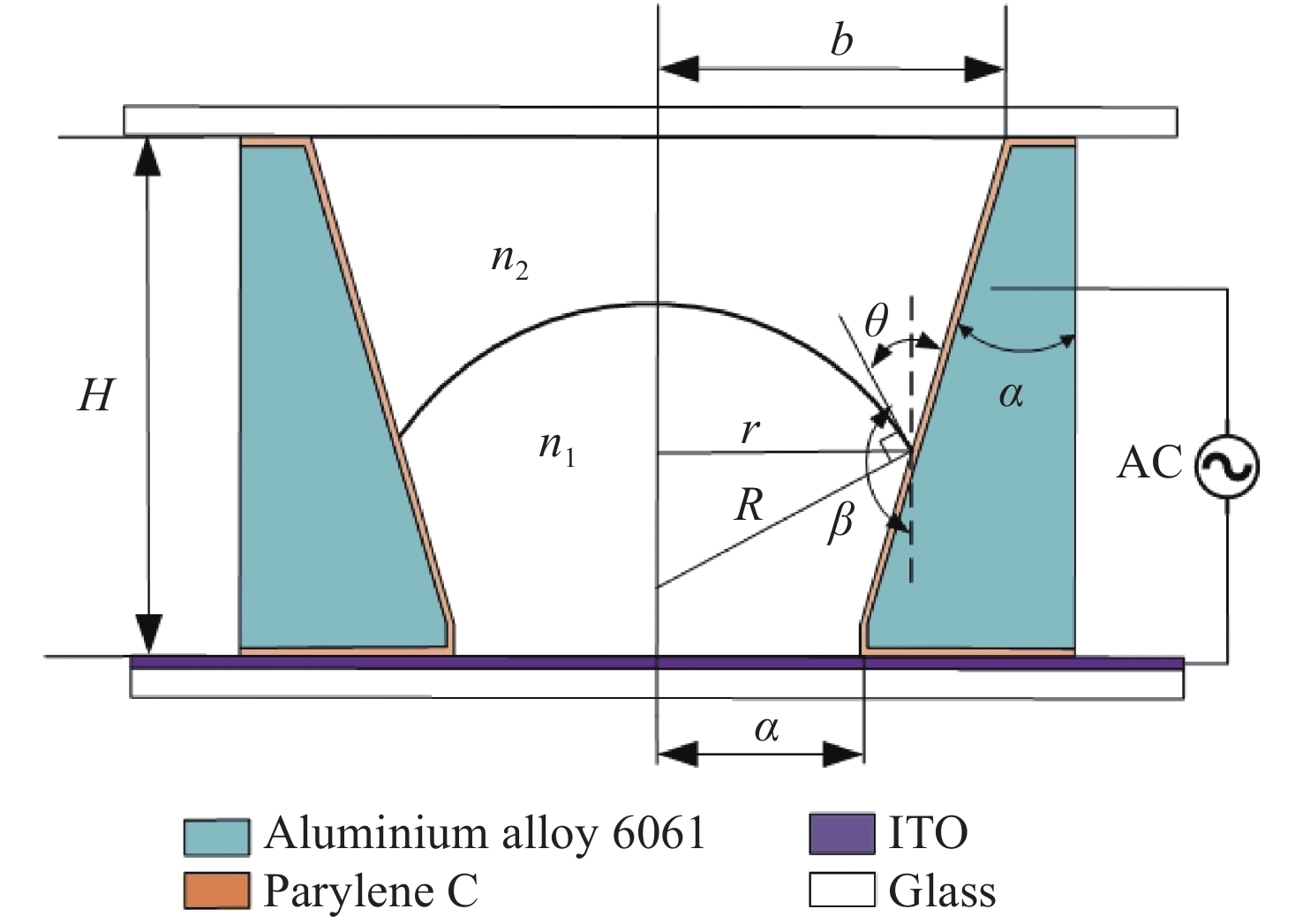
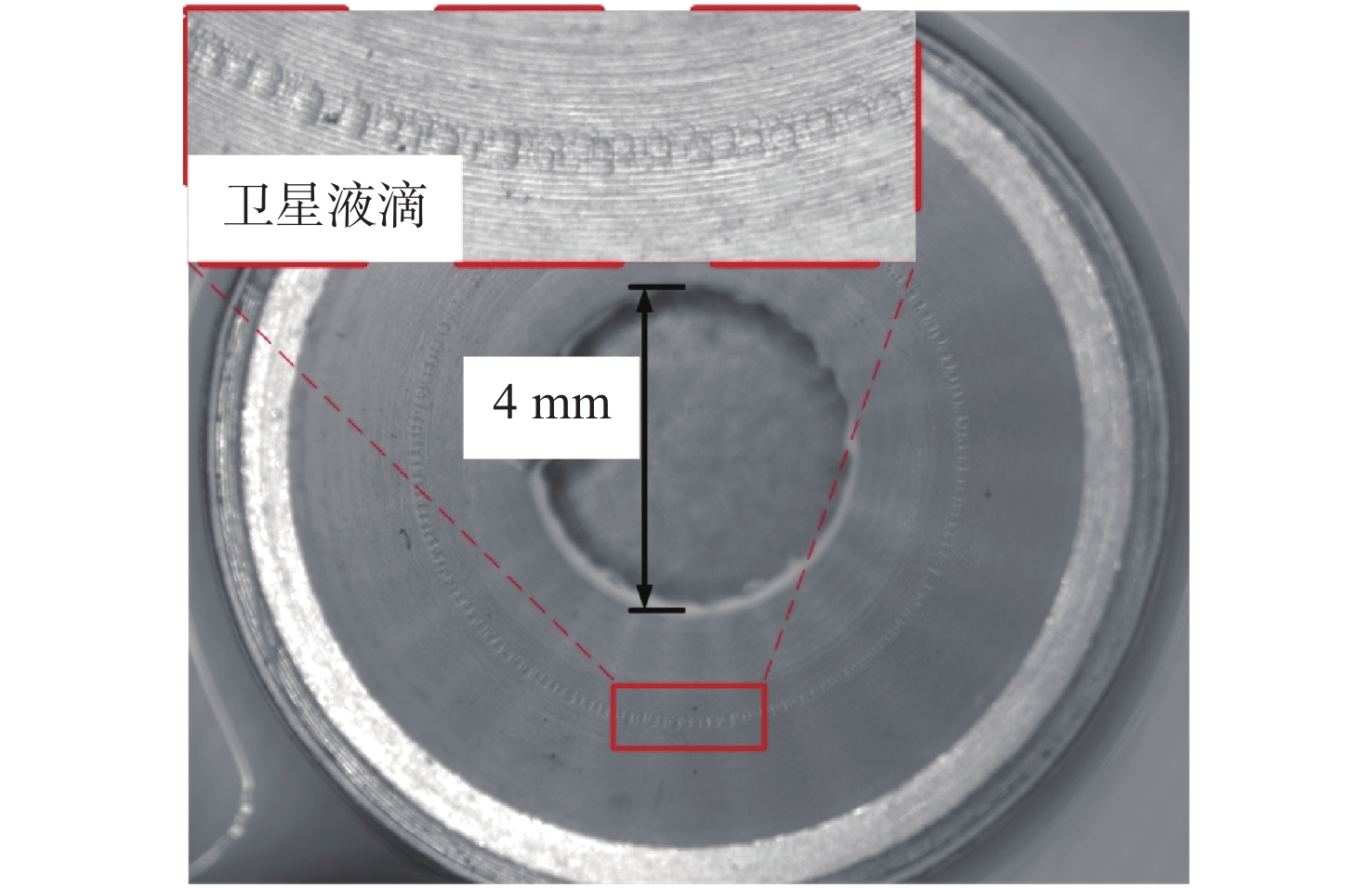
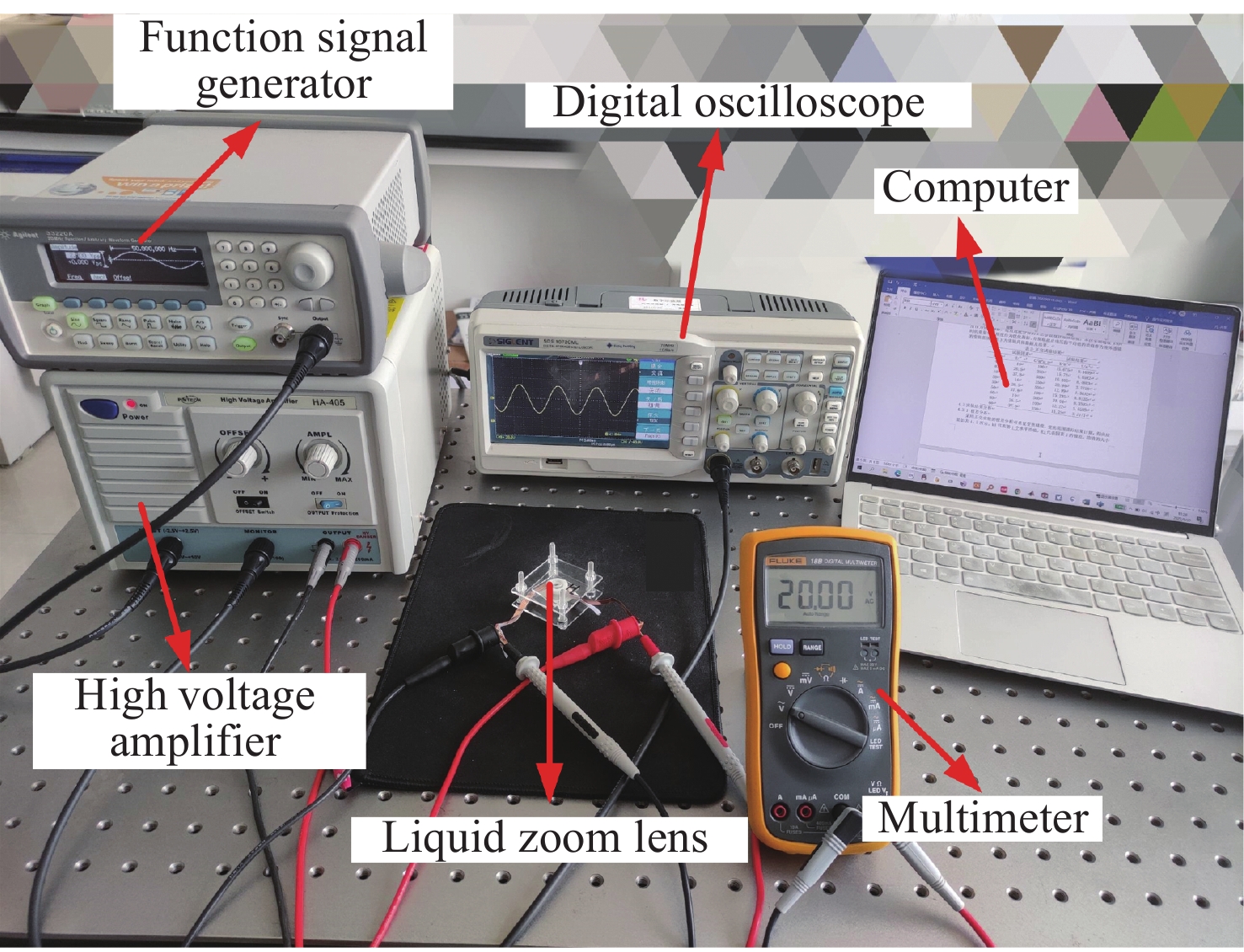
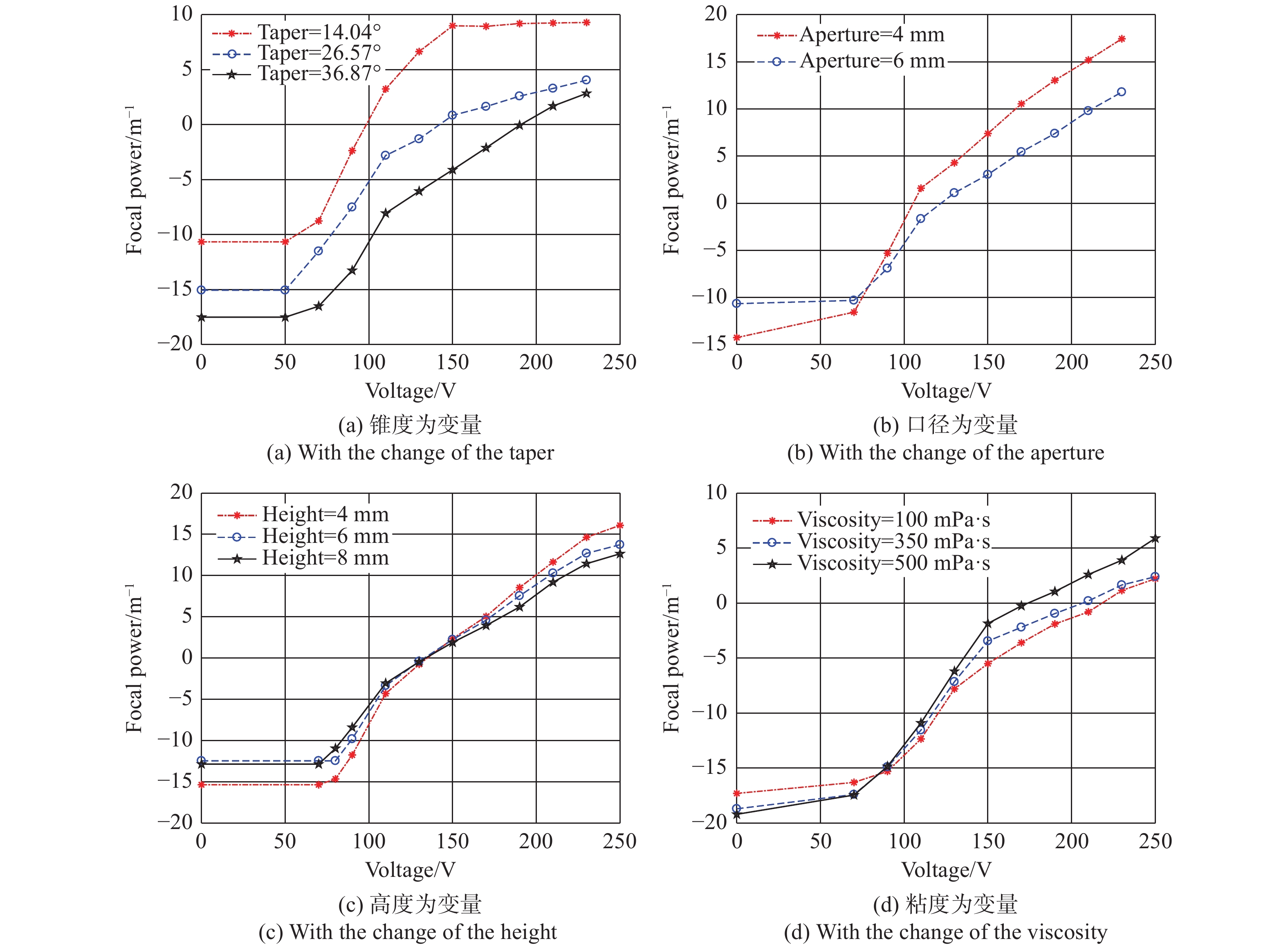
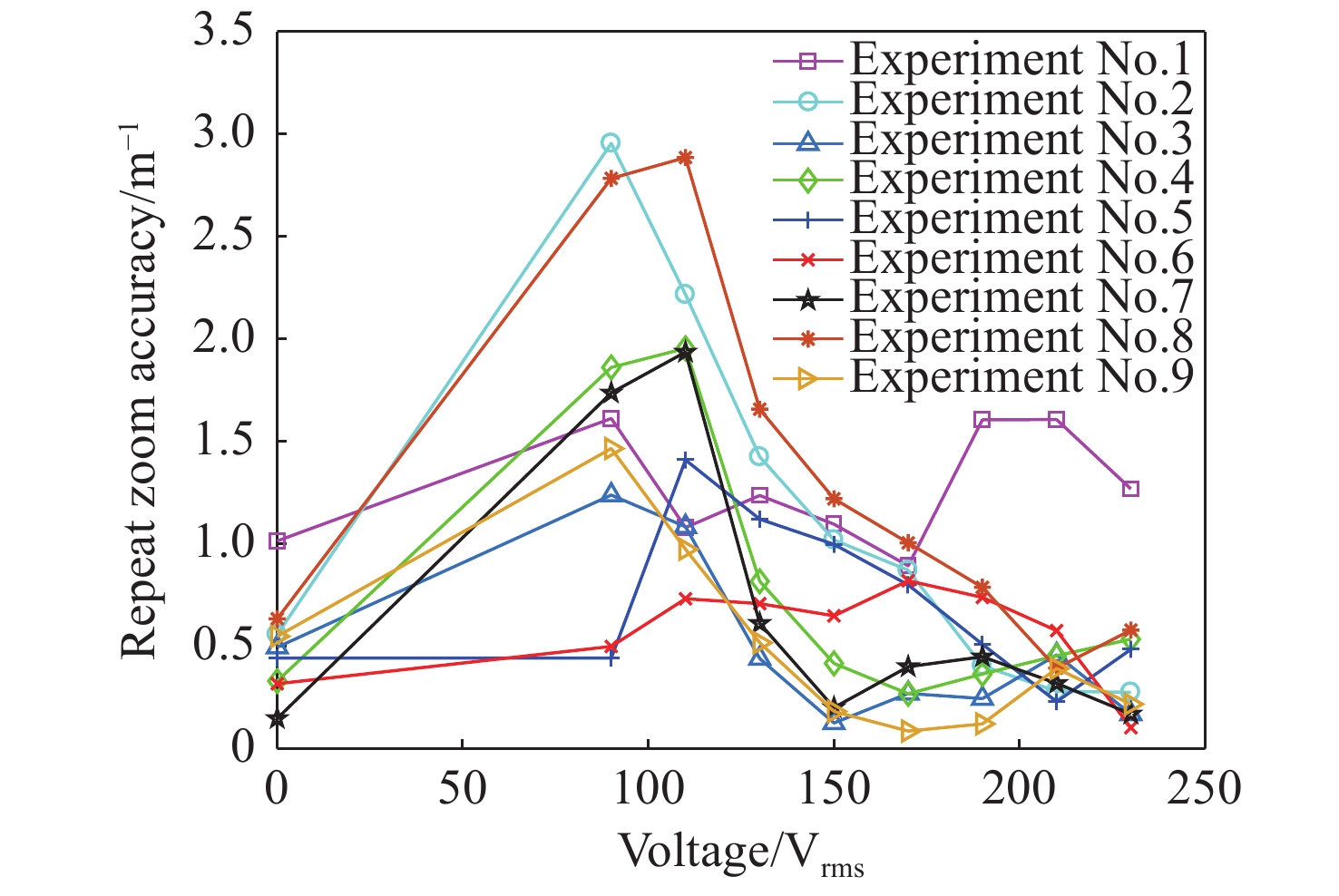
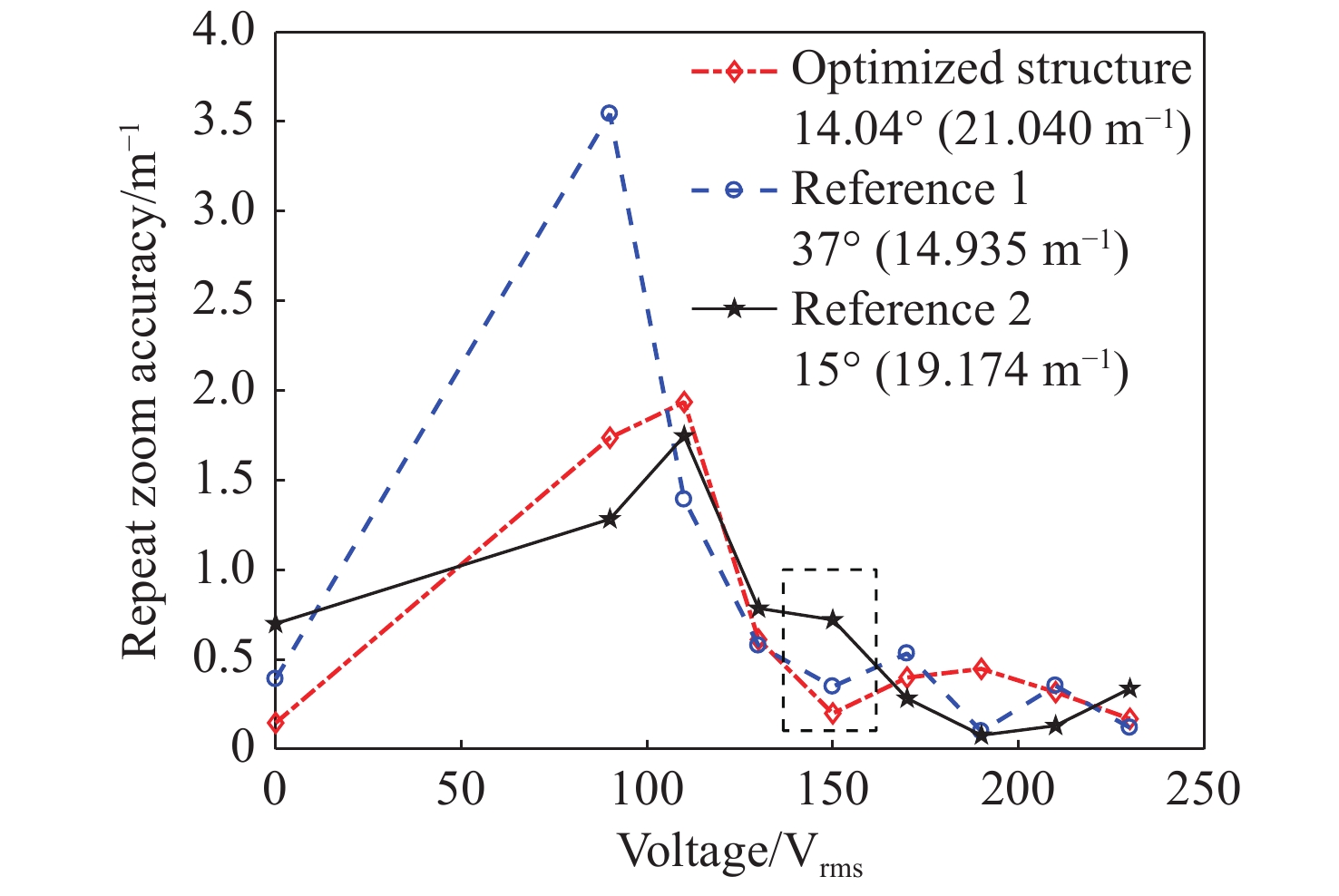
借鉴玻璃透镜的研究方法,提出了一种基于统计数据的液体透镜重复变焦精度指标,用于描述其变焦稳定性,并给出了液体透镜设计参数优化及材料优选的实验方法。首先,通过初步实验研究与分析,得到影响液体透镜重复变焦精度的主要影响因素——极性溶液体积、锥度、非极性溶液粘度;其次,以重复变焦精度和变焦范围作为评价指标,发现重复变焦精度与电压的关系不具有单调性,存在先升后降的现象。在此基础上,运用极差分析与综合平衡法,得到各因素的不同影响程度及最优参数组合,采用正交实验法优化设计参数。最后,实验验证了该方法的有效性。实验结果表明,优化后的液体透镜,在150 V电压处,重复变焦精度为0.2 m−1;在0~230 V电压范围内,变焦范围为−15.2~5.85 m−1。结果表明本文所提出的方法基本满足液体透镜变焦稳定可靠、精度高、变焦范围大等要求。

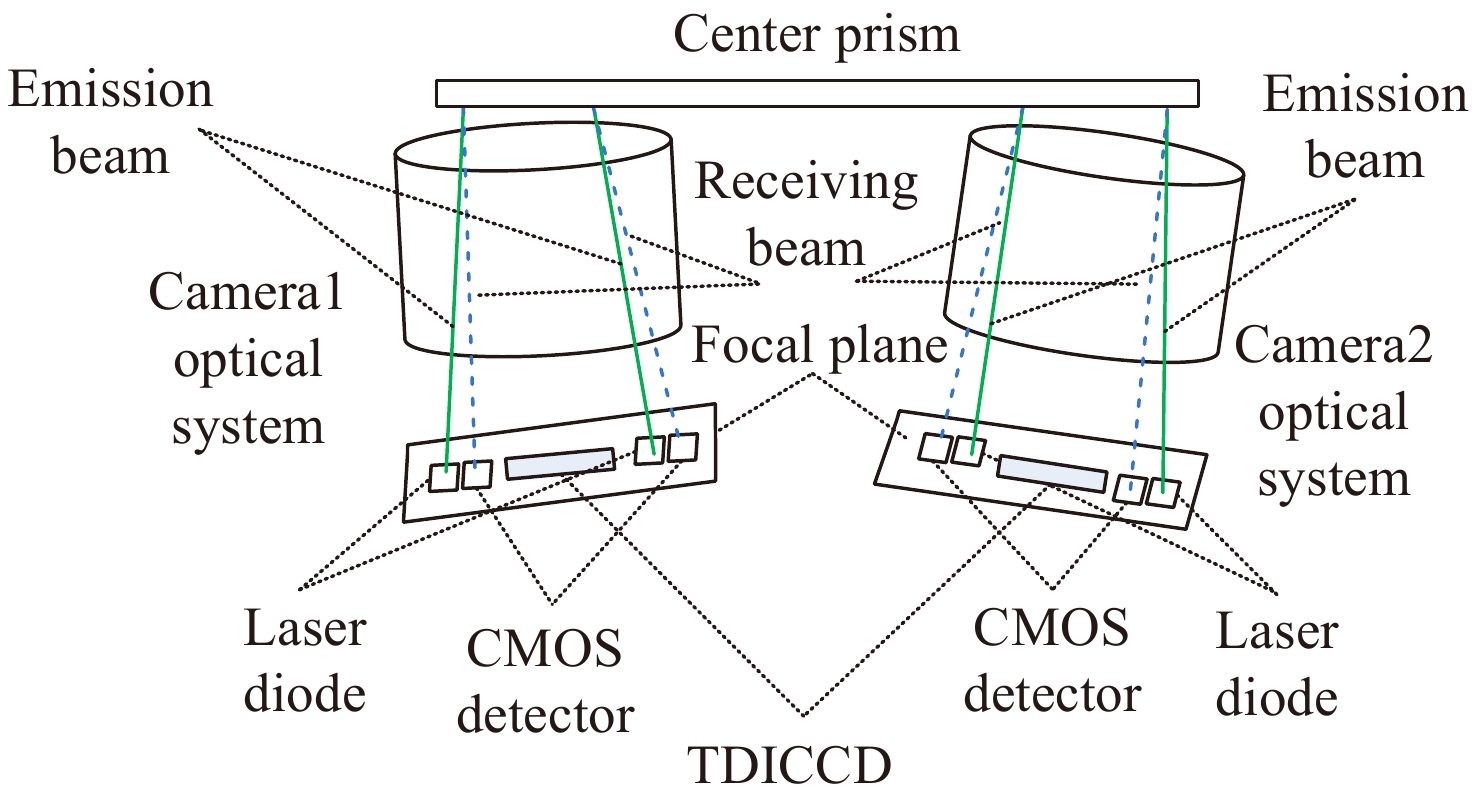
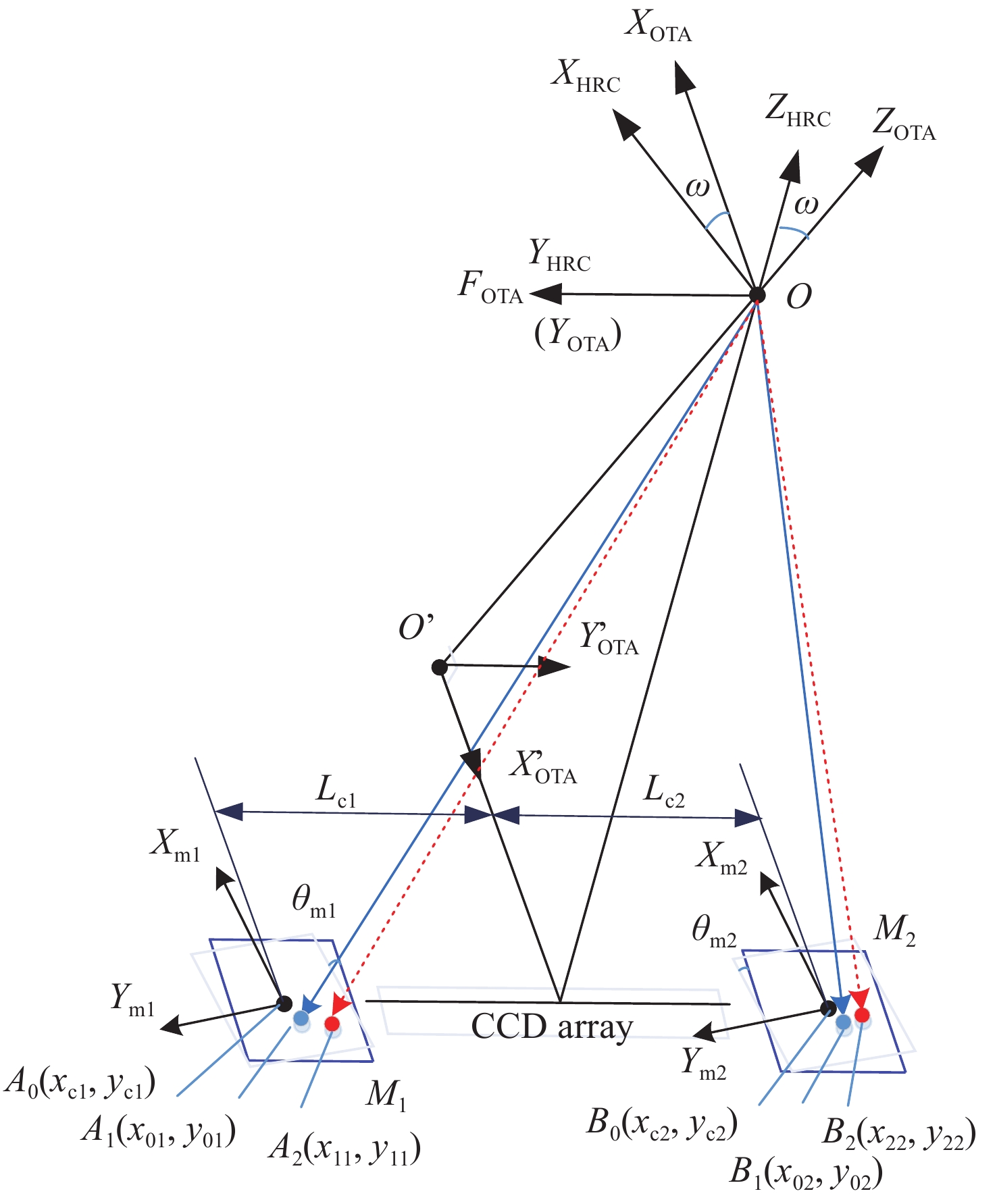
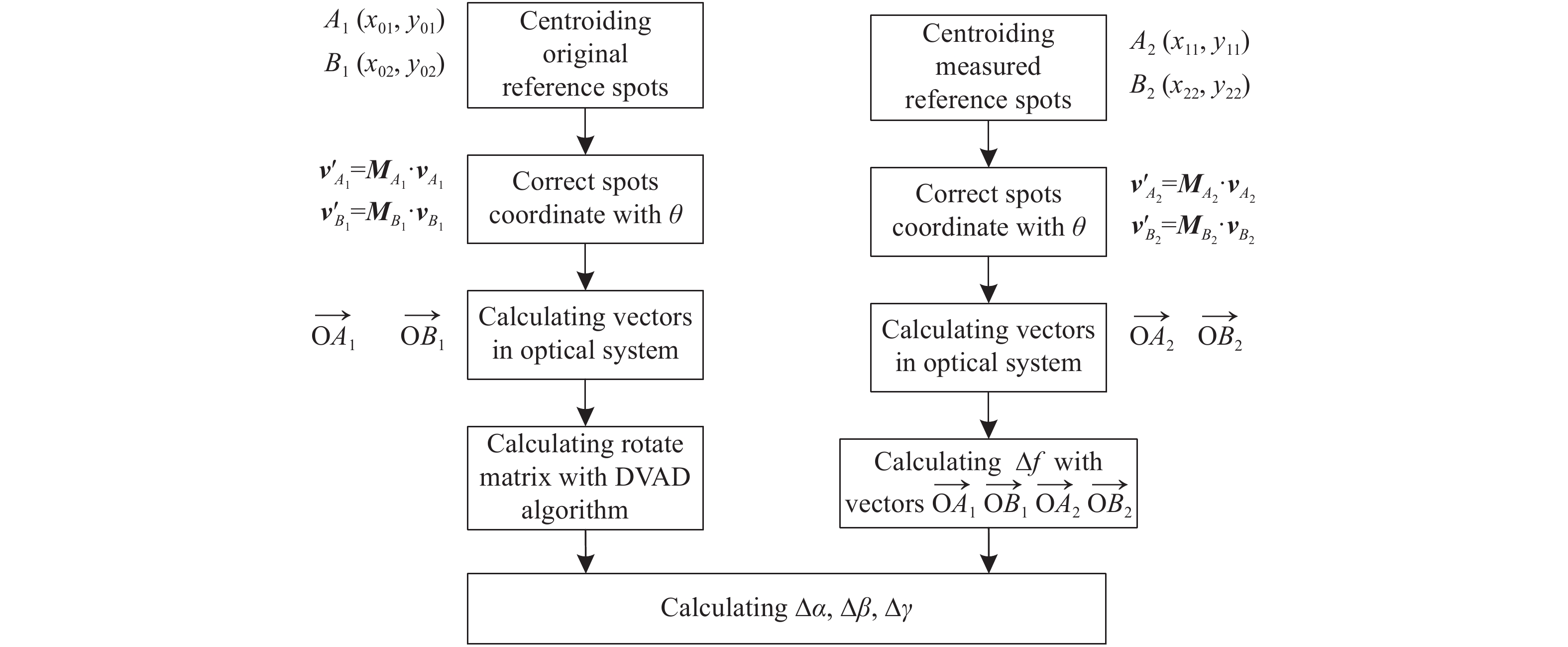
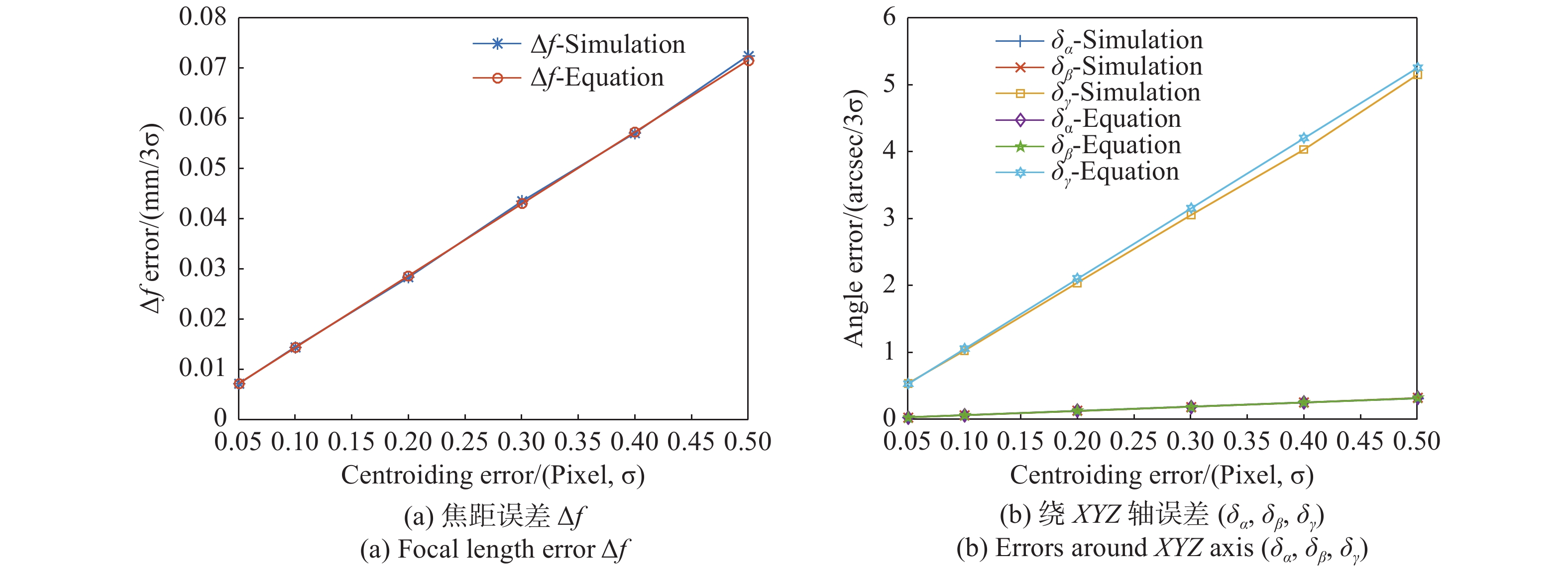
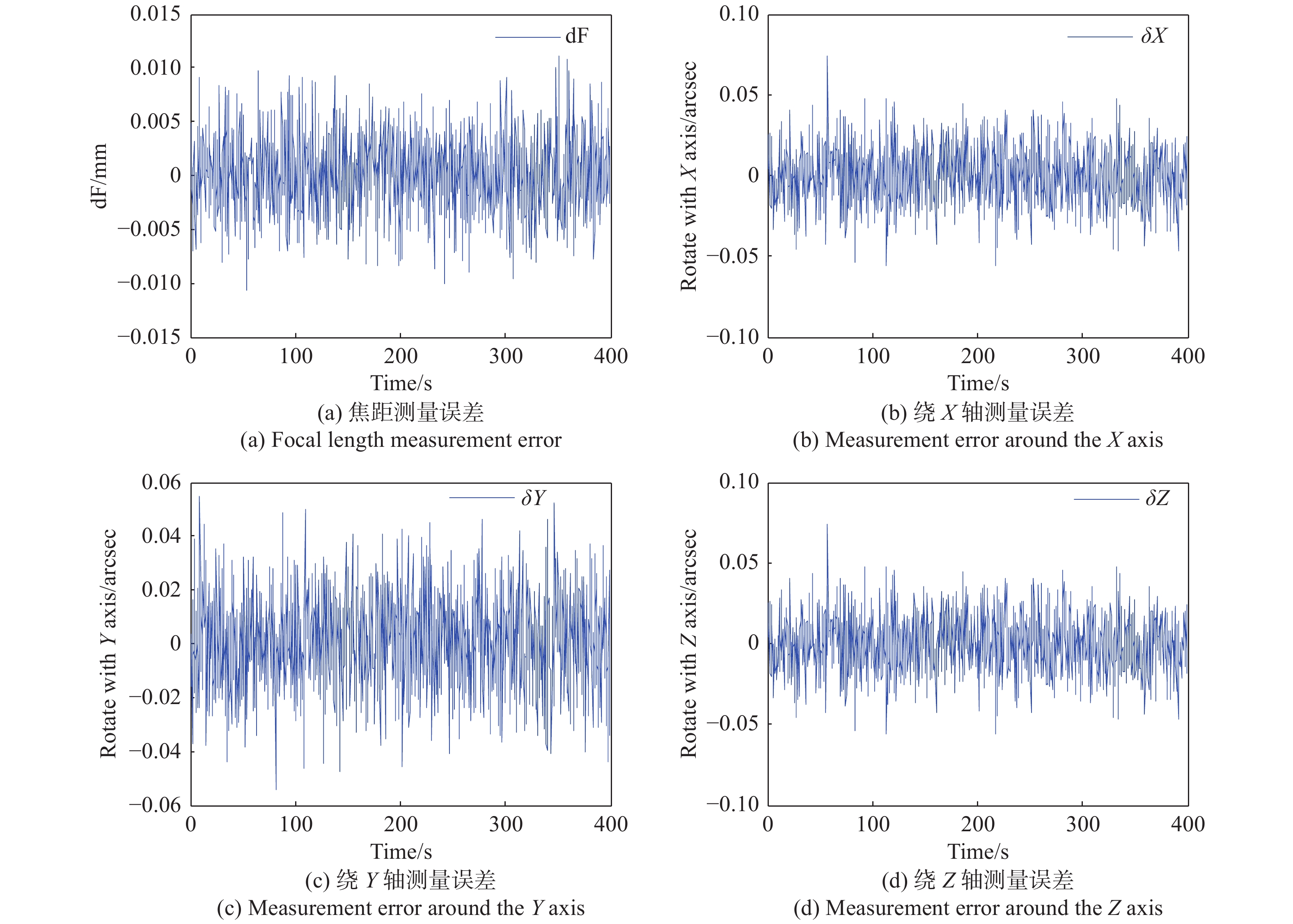
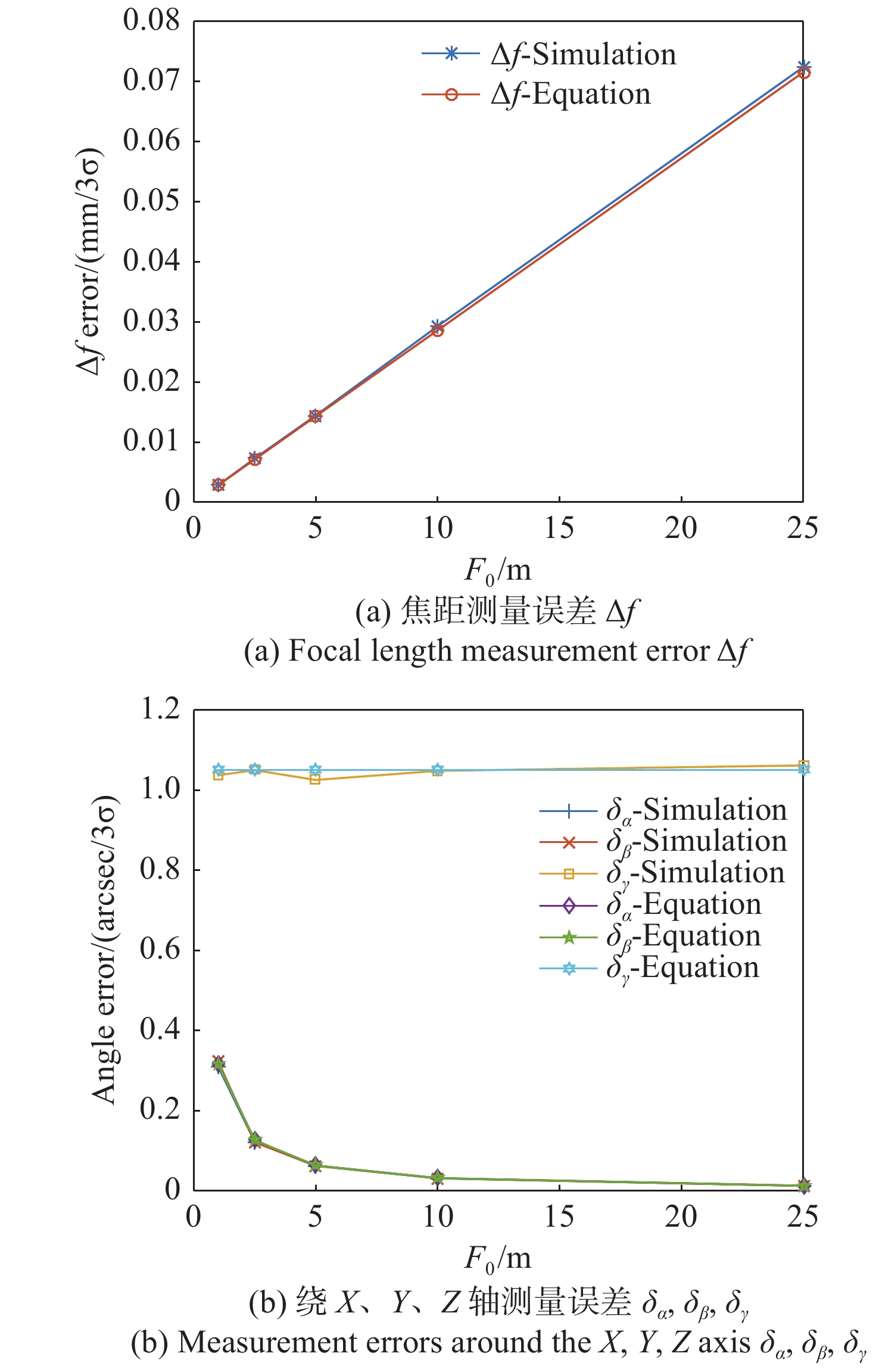
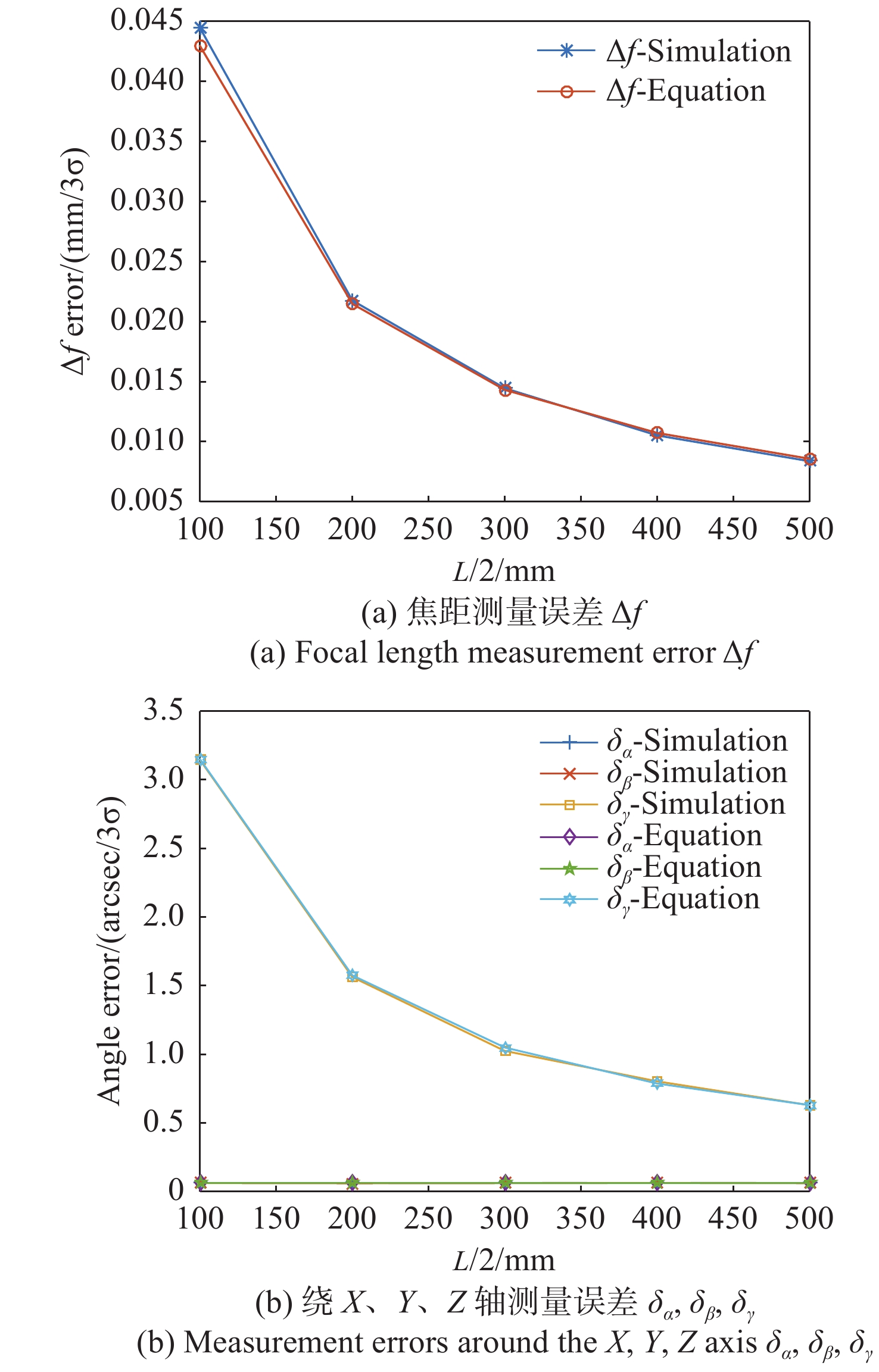
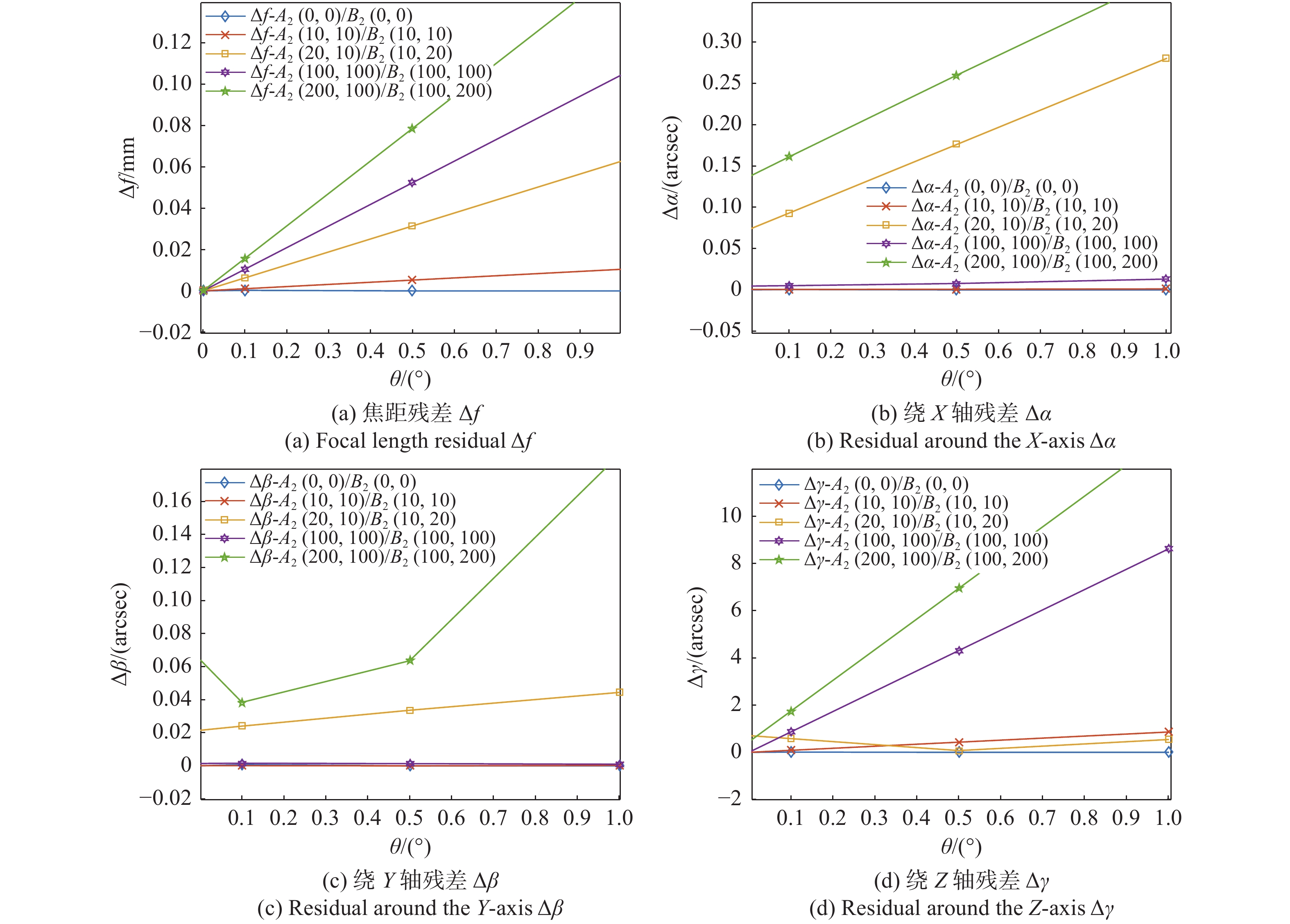
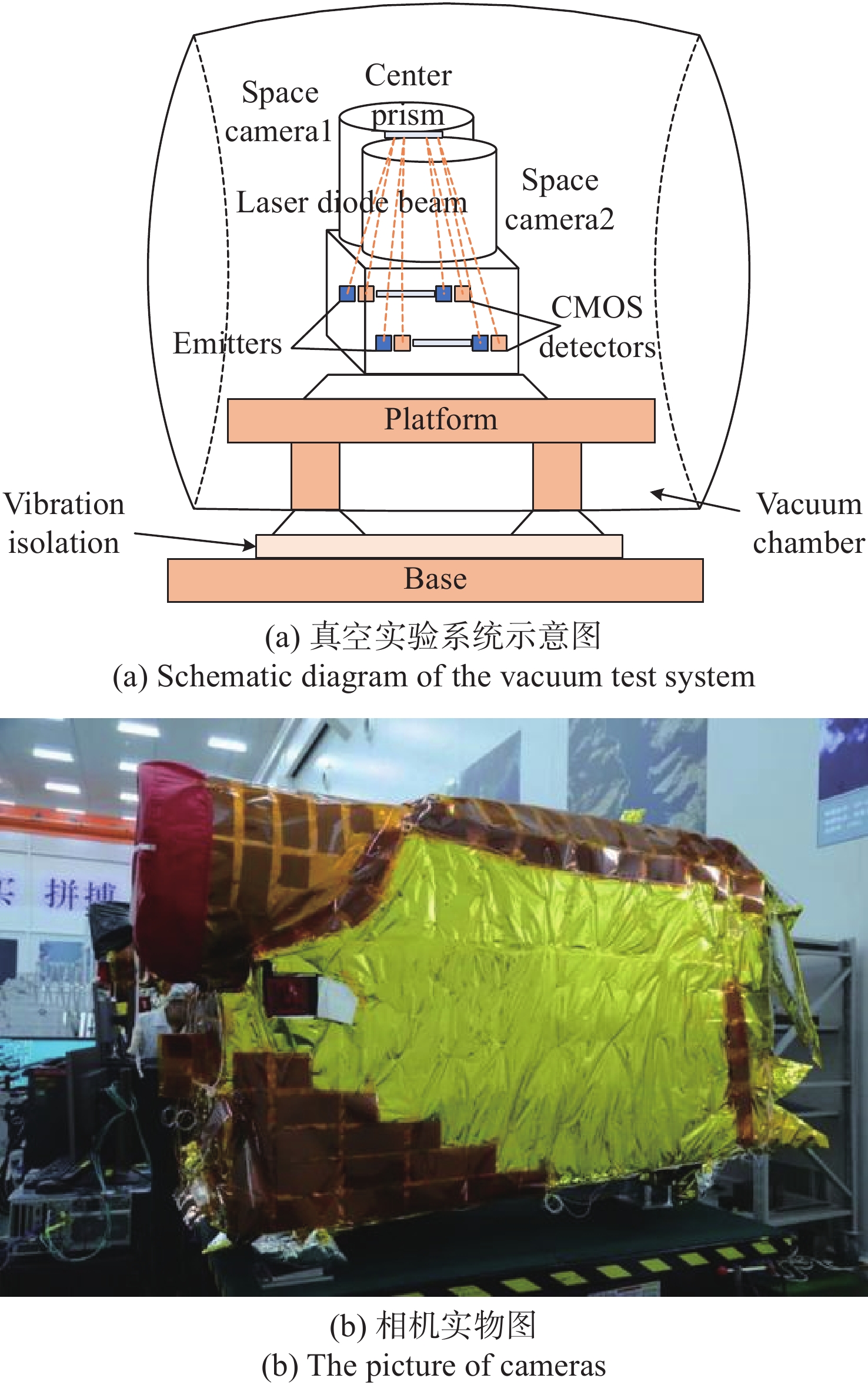
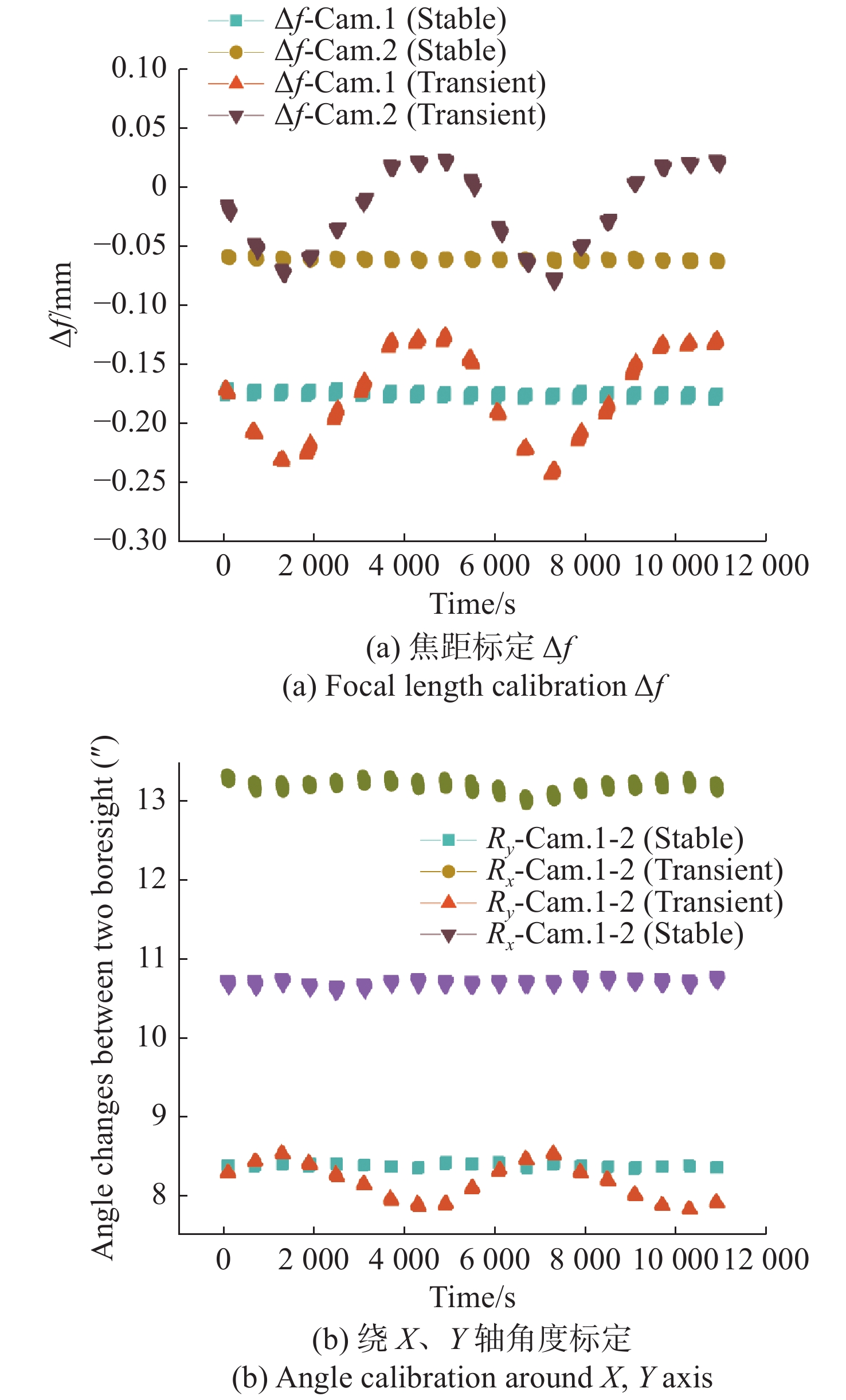
本文建立了一个航天线阵测绘相机视轴测量模型,以实现对双线阵测绘相机视轴抖动的实时测量。首先,通过在相机焦平面两端设置激光收发装置,经由中央棱镜关联,构建了两台相机之间的夹角参数变化测量模型。接着,基于双矢量定姿原理推导了计算表达式,可以实现相机焦距及绕XYZ三轴变化量的高精度测量。对计算方法的误差进行了分析,并通过仿真进行了验证。此外,还对本文提出方法与工程上常用的简化方法之间的残差进行了仿真,结果表明,简化方法仅在很小的测量范围内与本文提出方法一致性良好,当测量角度范围扩大到2′时,采用本文提出的计算方法才能得到精度为0.1″的测量结果。最后,在热真空环境下进行了试验验证,结果显示采用该计算方法得到的相机内外参标定精度达0.1″,结果表明两台相机夹角参数表现出轨道周期性规律,为后续开展立体测绘任务提供了良好的参考。
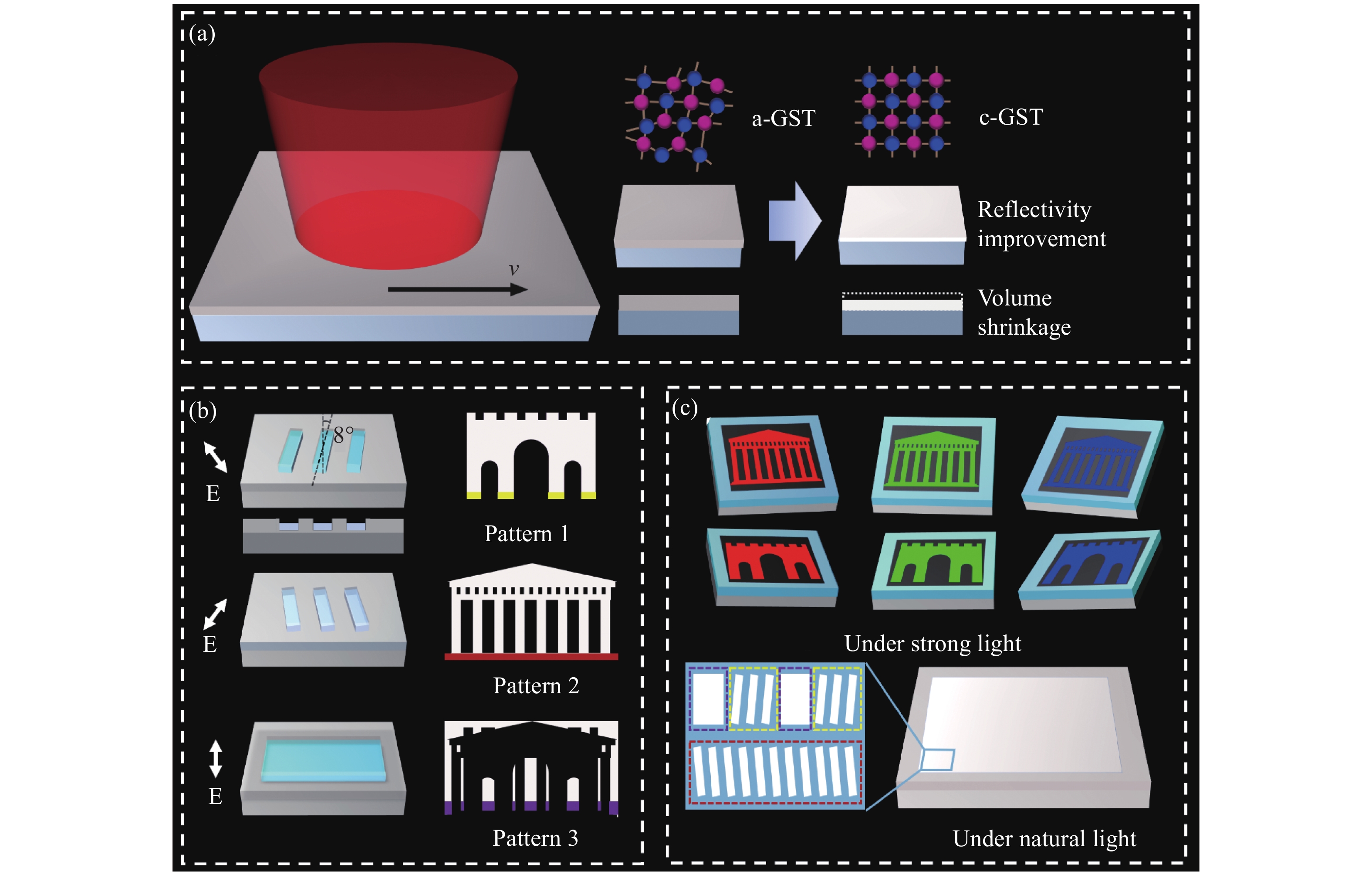
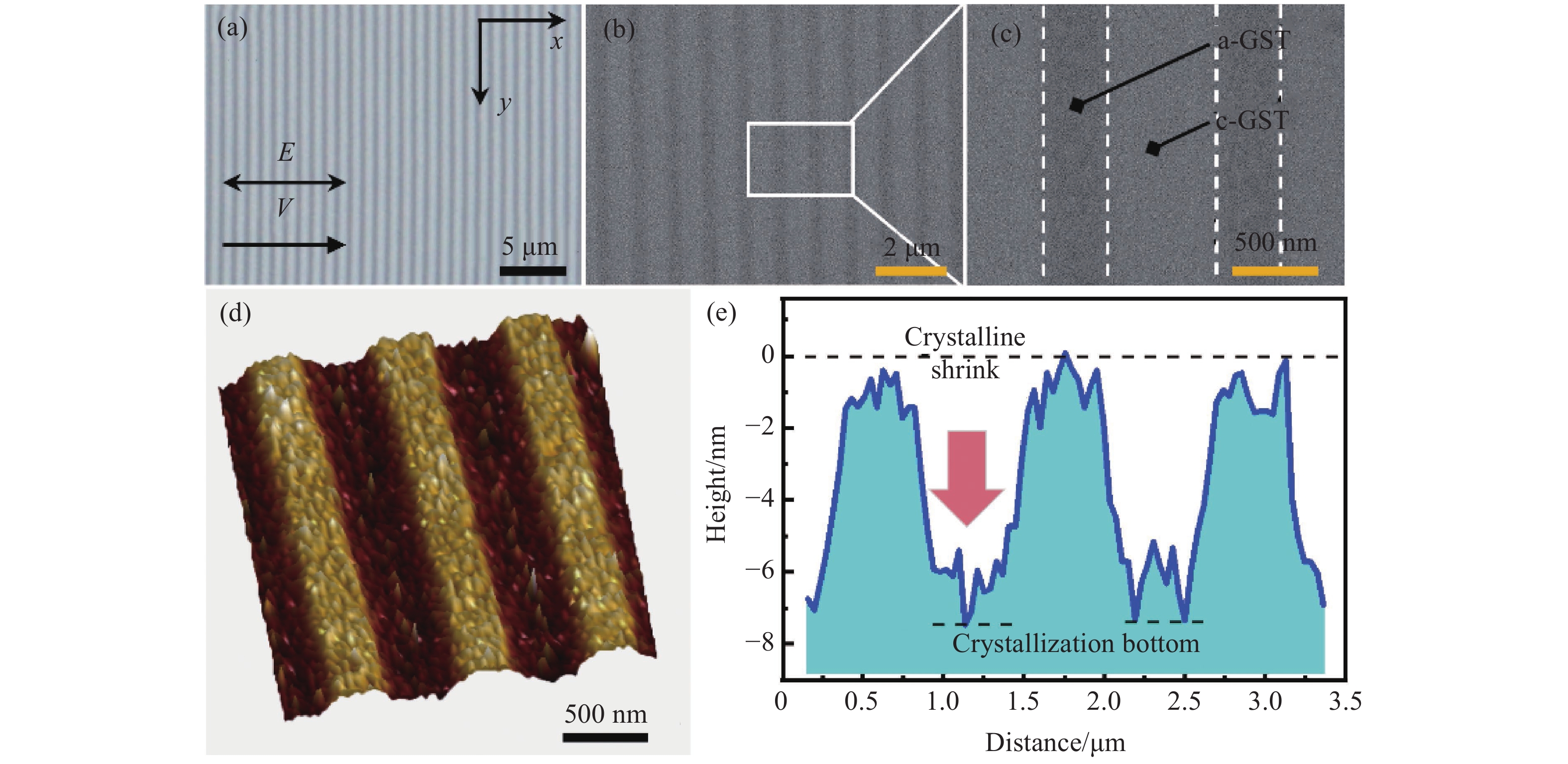
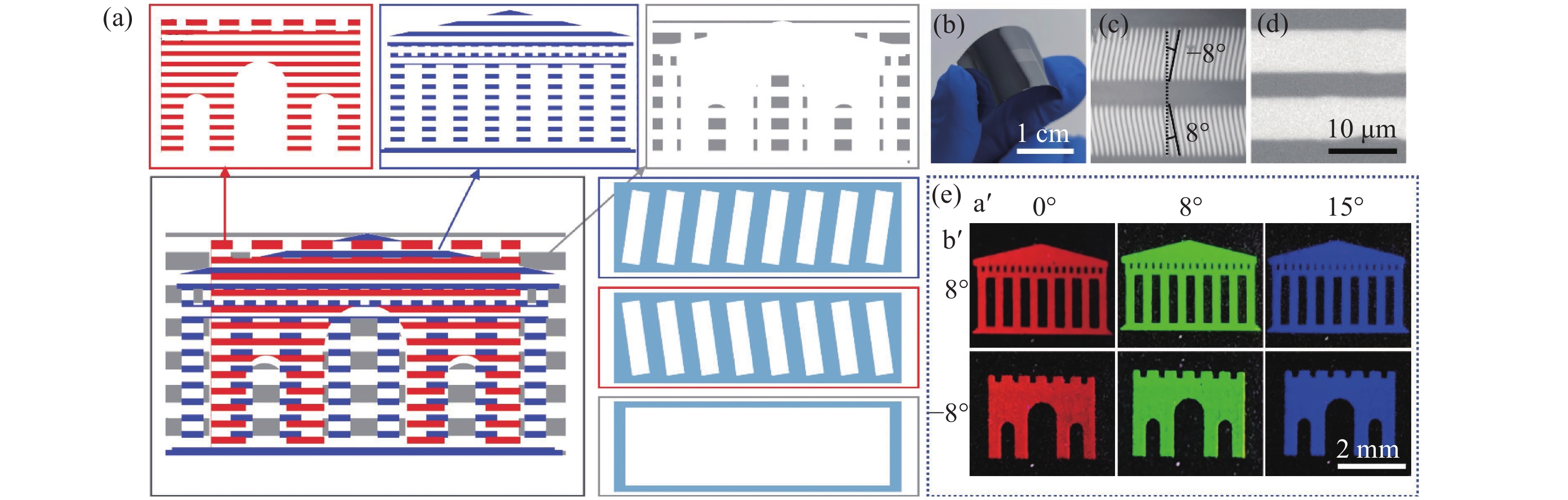
图案信息的光学加密在防伪、信息加密存储等方面具有广泛的应用,基于各向异性功能复用的结构色超表面得到发展。基于一维光栅衍射的光学加密超表面由于需要逐个加工掩模或单元结构,从而导致效率低下;传统激光烧蚀波纹结构(LIPSS)效率高,但所形成的结构均匀、一致性差。基于以上难题,提出了一种基于皮秒激光直写相变材料Ge2Sb2Te5得到的改性结构加工光学超表面的方法。首先,表征所制备的GST改性光栅的色散性能,结合改性光栅的偏振依赖性,设计了角度复用的信息加密超表面。实现了在自然光条件下加密,在强光条件下能够选择性解密读取并动态展示的性能。相比于传统加工方法,本方法可在一次直写过程中以同时打印的形式生成一系列光栅结构,提高了加工效率;同时加工得到的光栅结构均匀一致性好,提高了显色效果。利用取向角相差16°的改性光栅实现了无串扰的选择性信息读取,所得结构色均匀鲜艳。本文提出的加工策略在防伪、信息加密存储及可穿戴柔性显示设备等领域有深刻的应用前景。

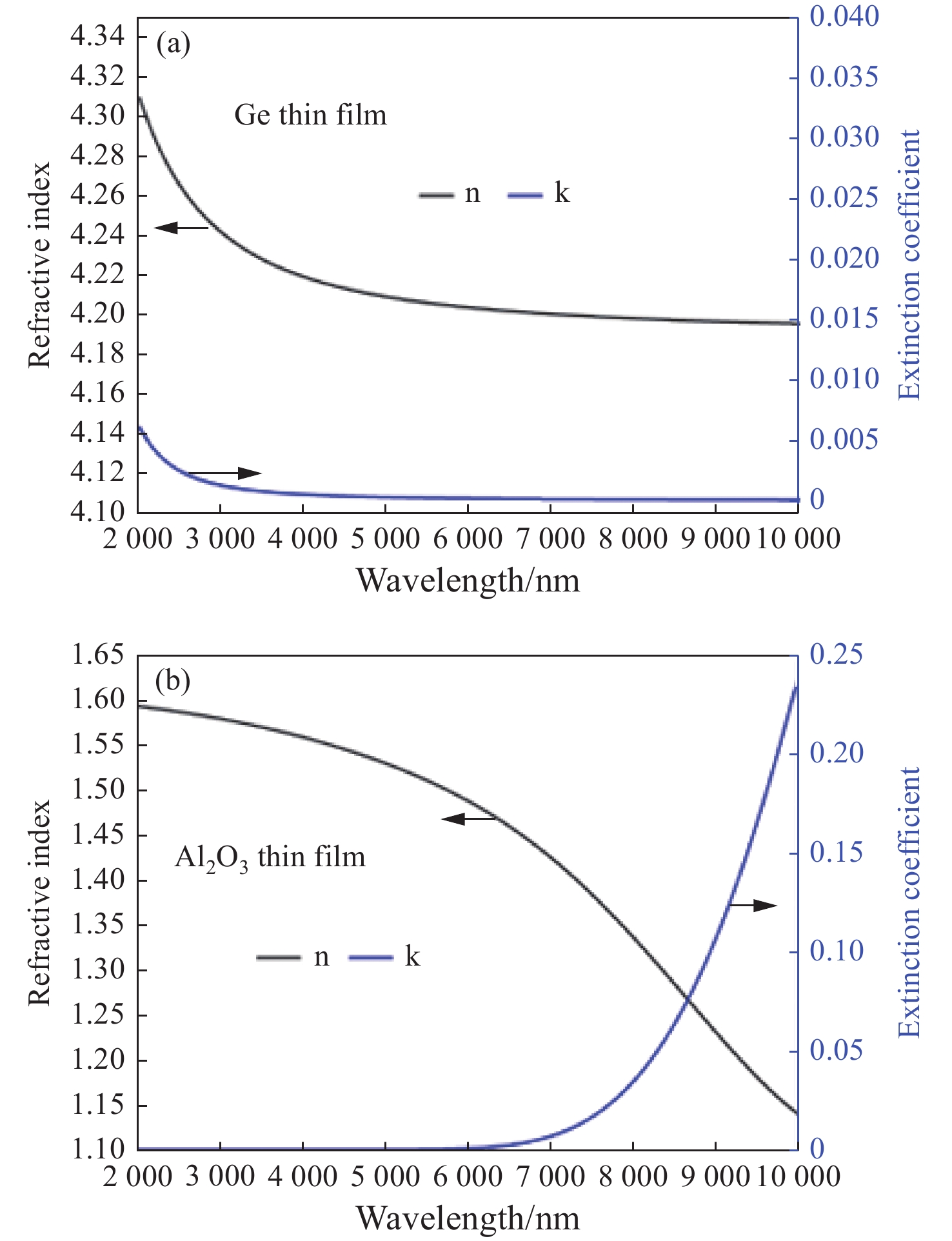
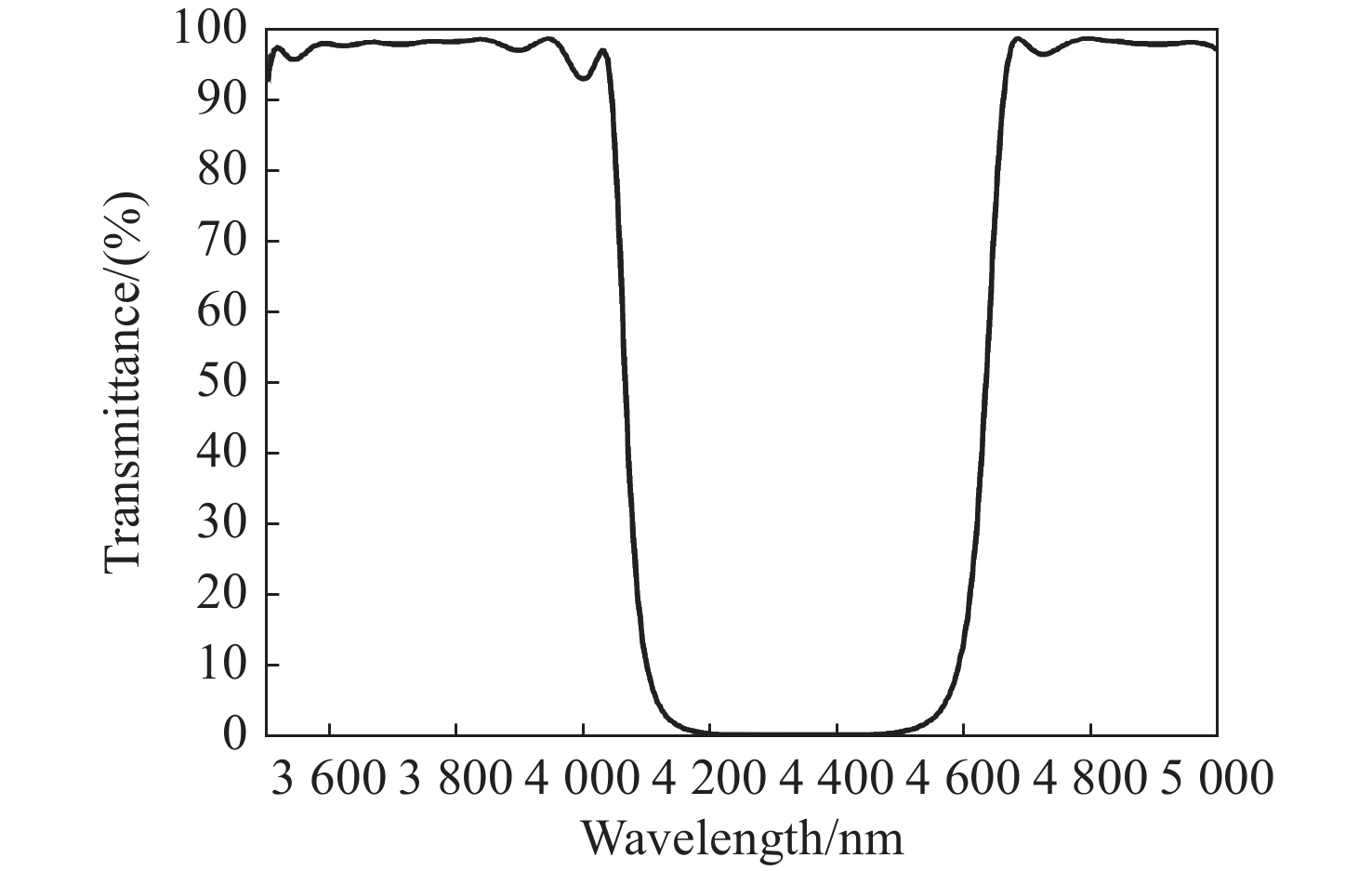
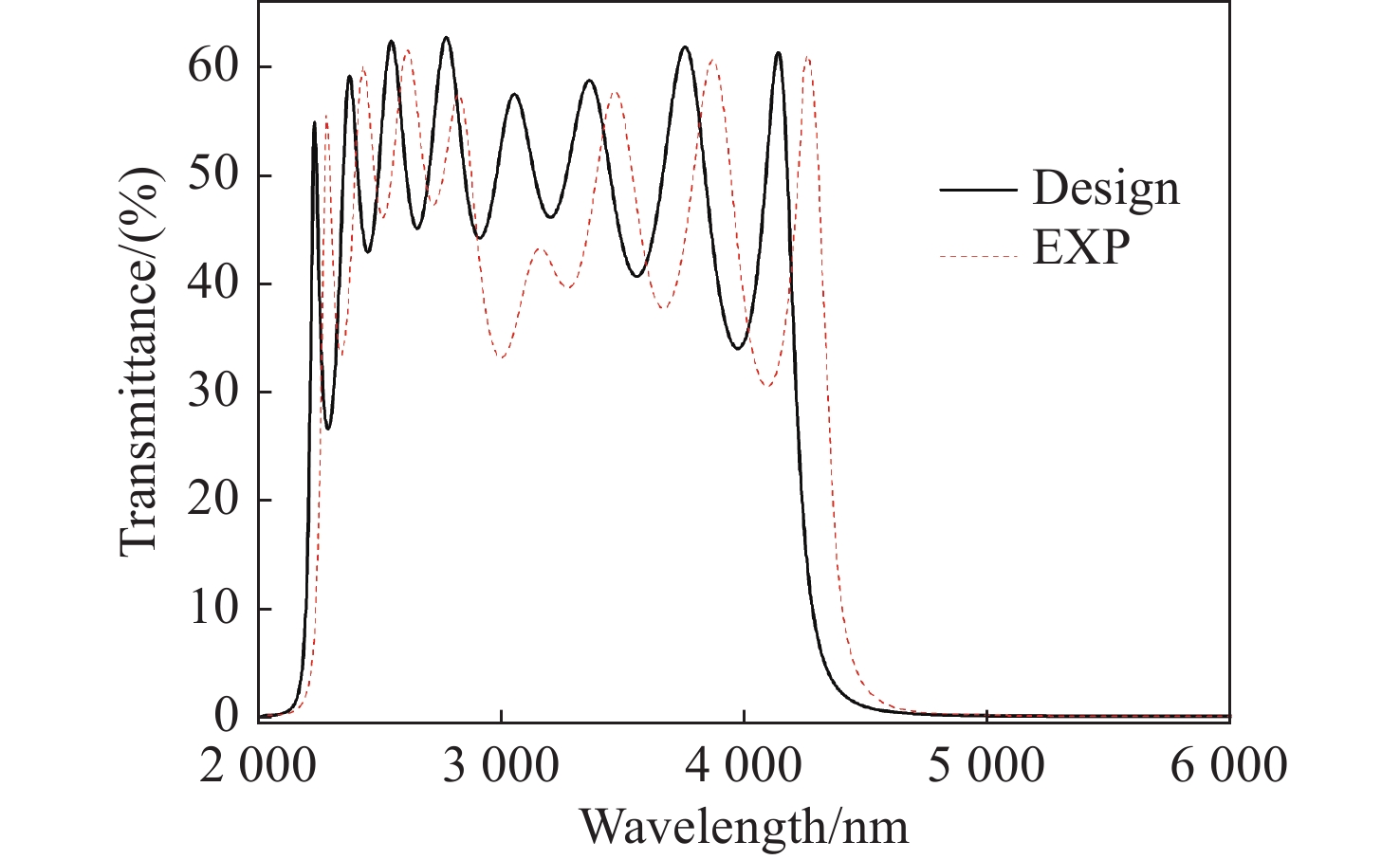
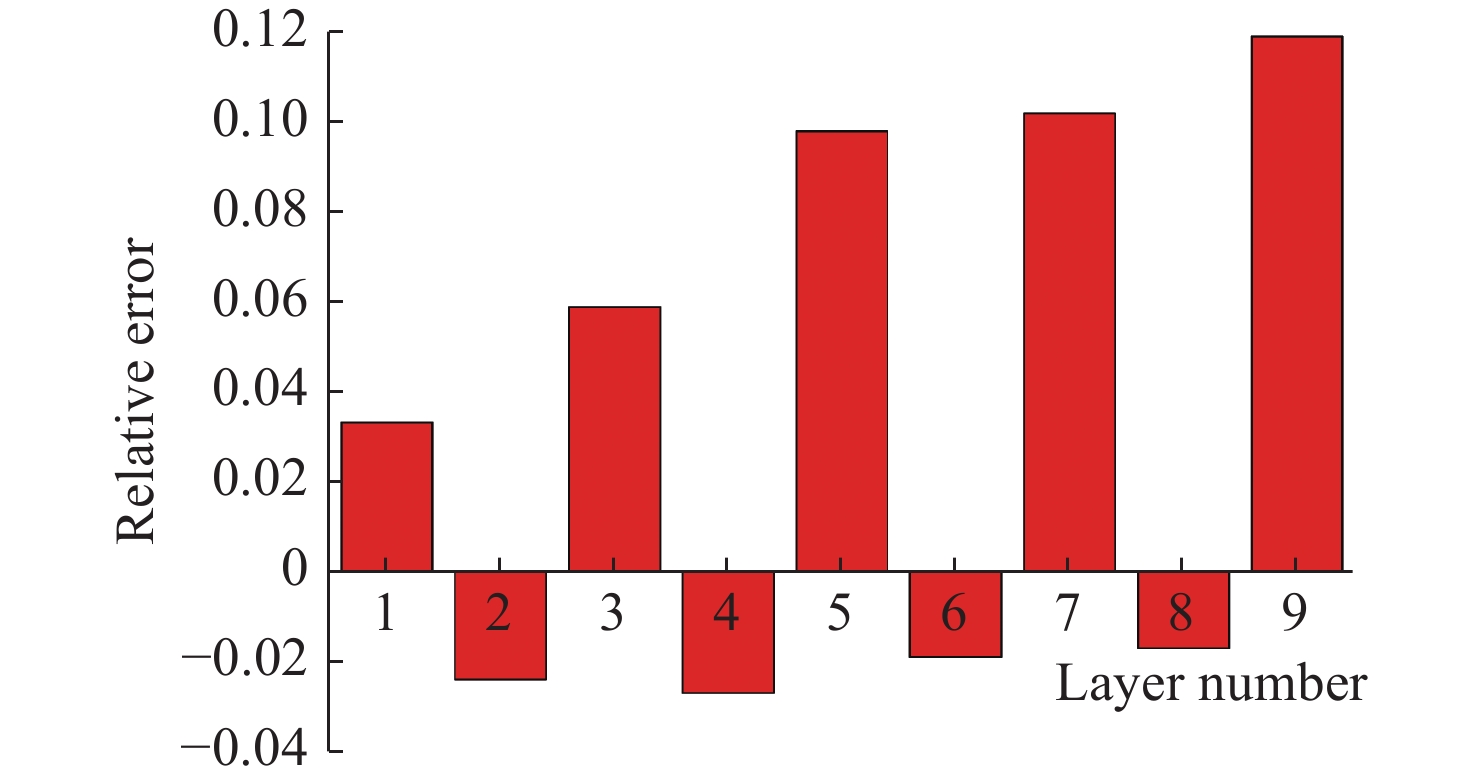
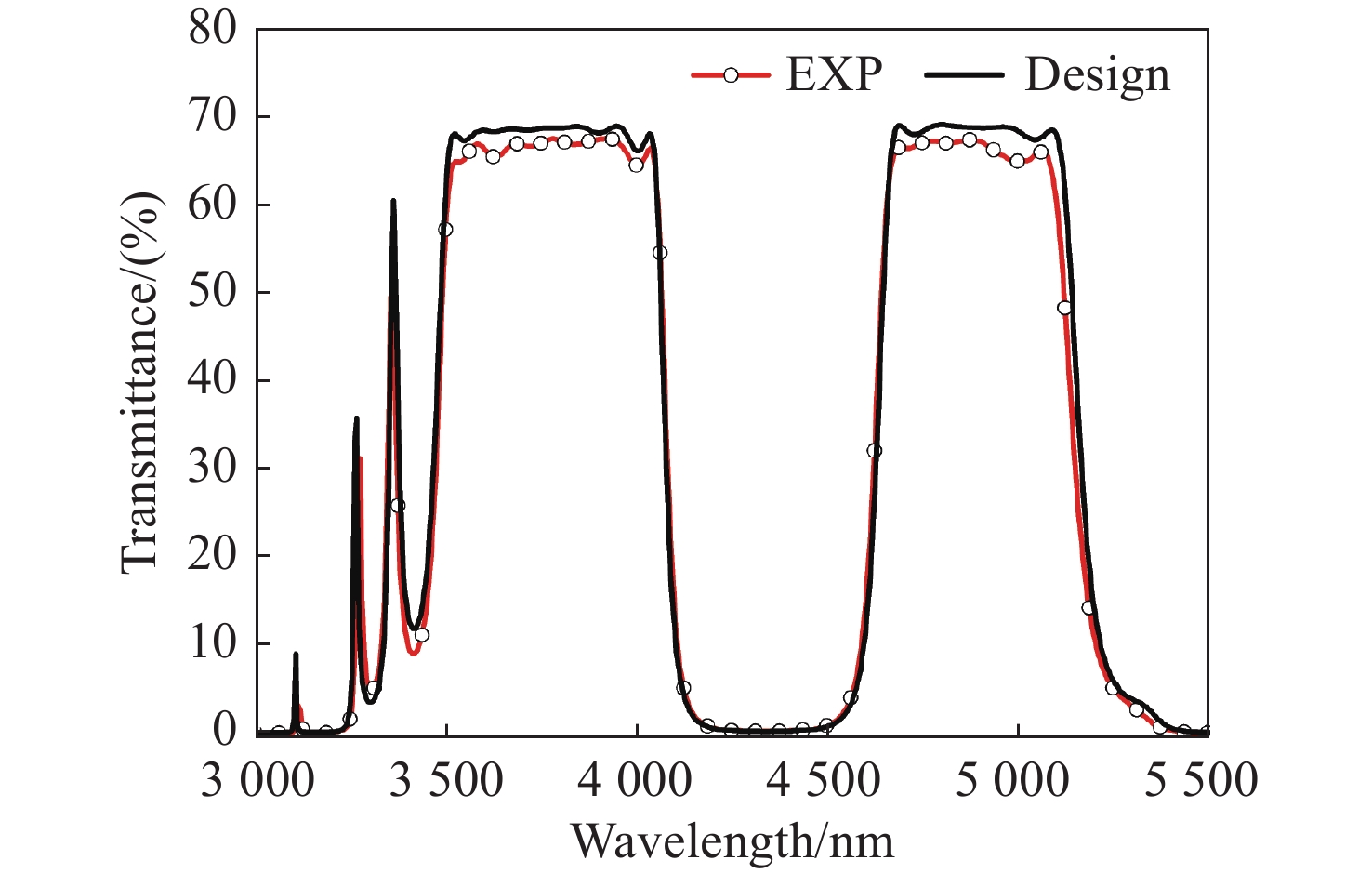
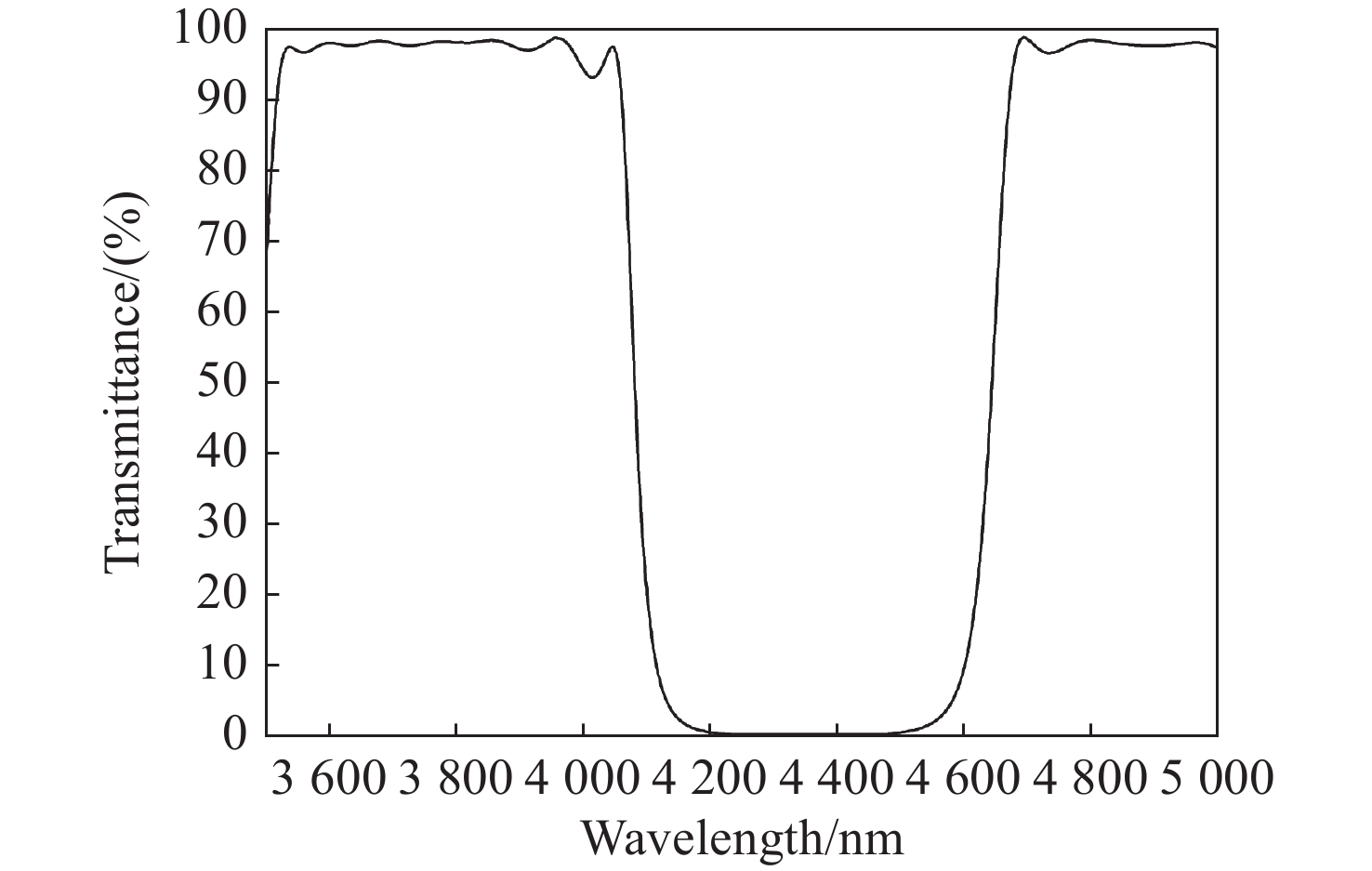
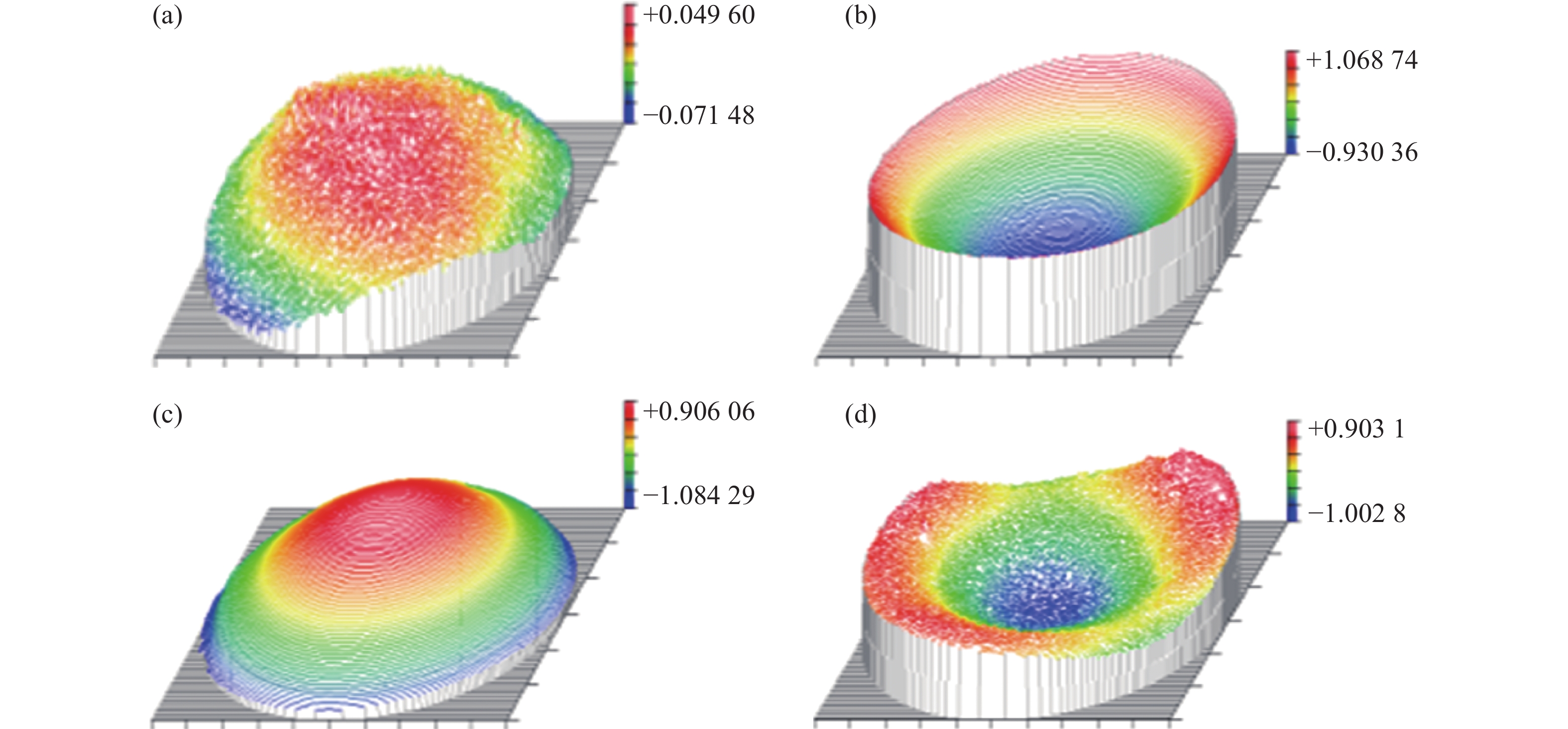
为了有效抑制4.3 μm CO2辐射对3 μm~5 μm中波红外目标信号的干扰,基于Needle随机插层优化算法,采用电子束蒸发方法,建立了石英晶振监控方式下多层超厚Ge/Al2O3薄膜生长误差的精确反演修正模型,实现了中波红外陷波滤光片的设计、精确反演与制备;同时,针对中波红外陷波滤光片存在的面型变化大的问题,采用预置基底面型方法,实现了中波红外陷波滤光片低面型调控。研究结果表明:随着镀膜时间的增加,高折射率Ge膜具有较好的生长稳定性,而低折射率Al2O3薄膜材料沉积比例因子变化高达11.9%,且呈规律性渐变趋势;所制备的中波红外陷波滤光片在4.2 μm~4.5 μm波段区间平均截止透过率小于0.3%;3.5 μm~4.05 μm及4.7 μm~5.0 μm波段的平均透过率大于95%,镀膜后的面型被有效控制在较小范围;膜层具有较好的复杂环境适应性,成功通过了GJB 2485-95中牢固性、高温、低温、湿热等环境试验考核。


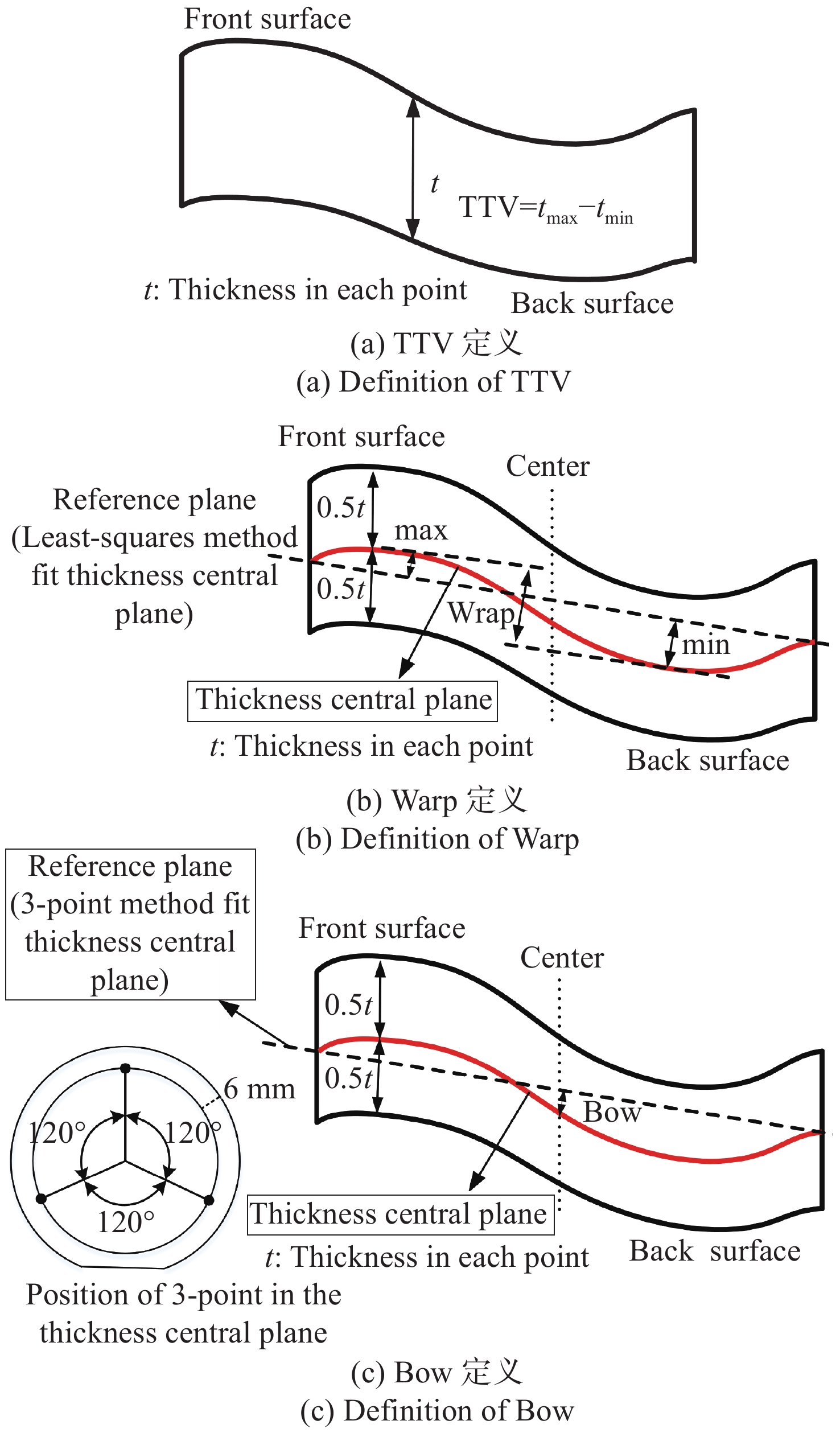
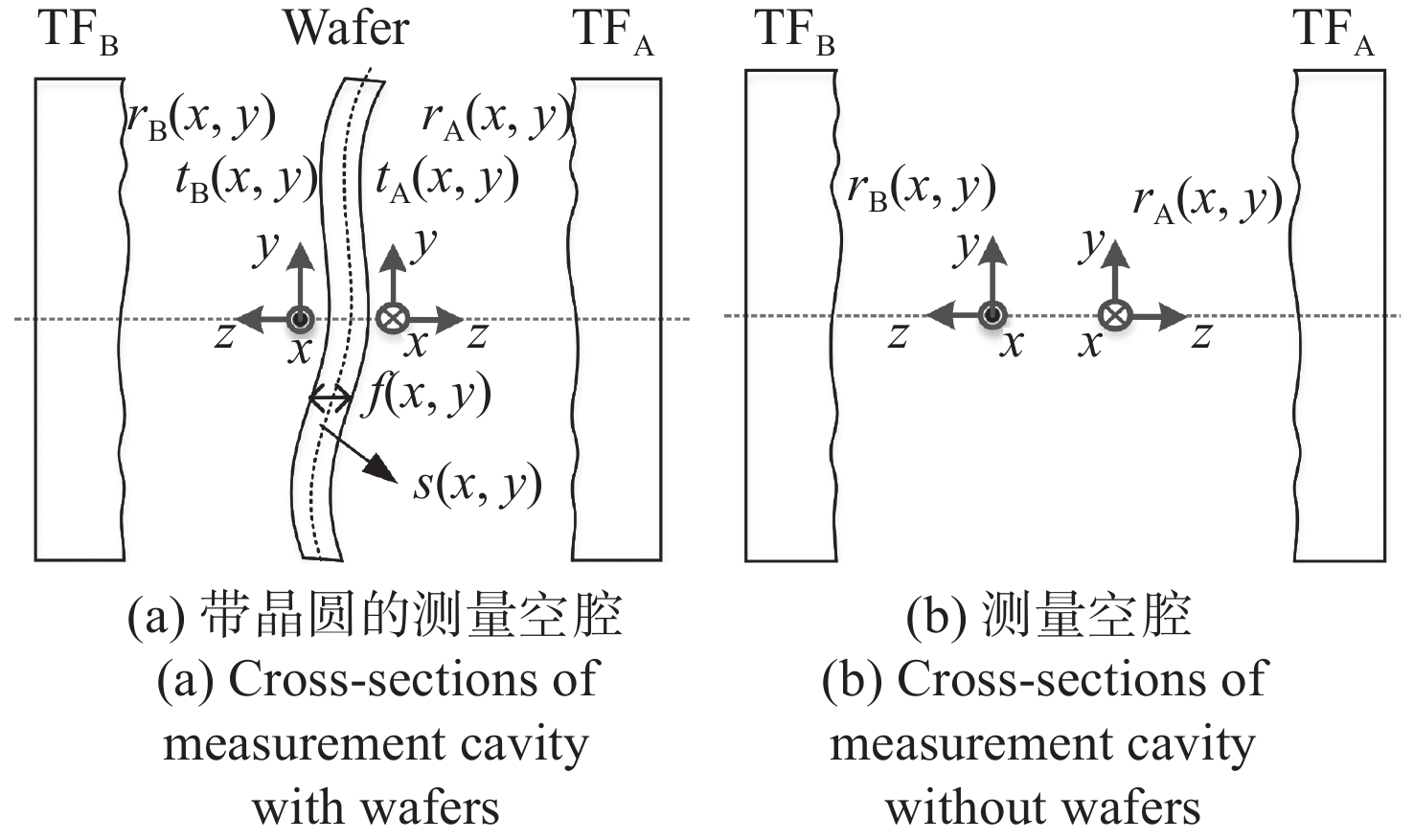
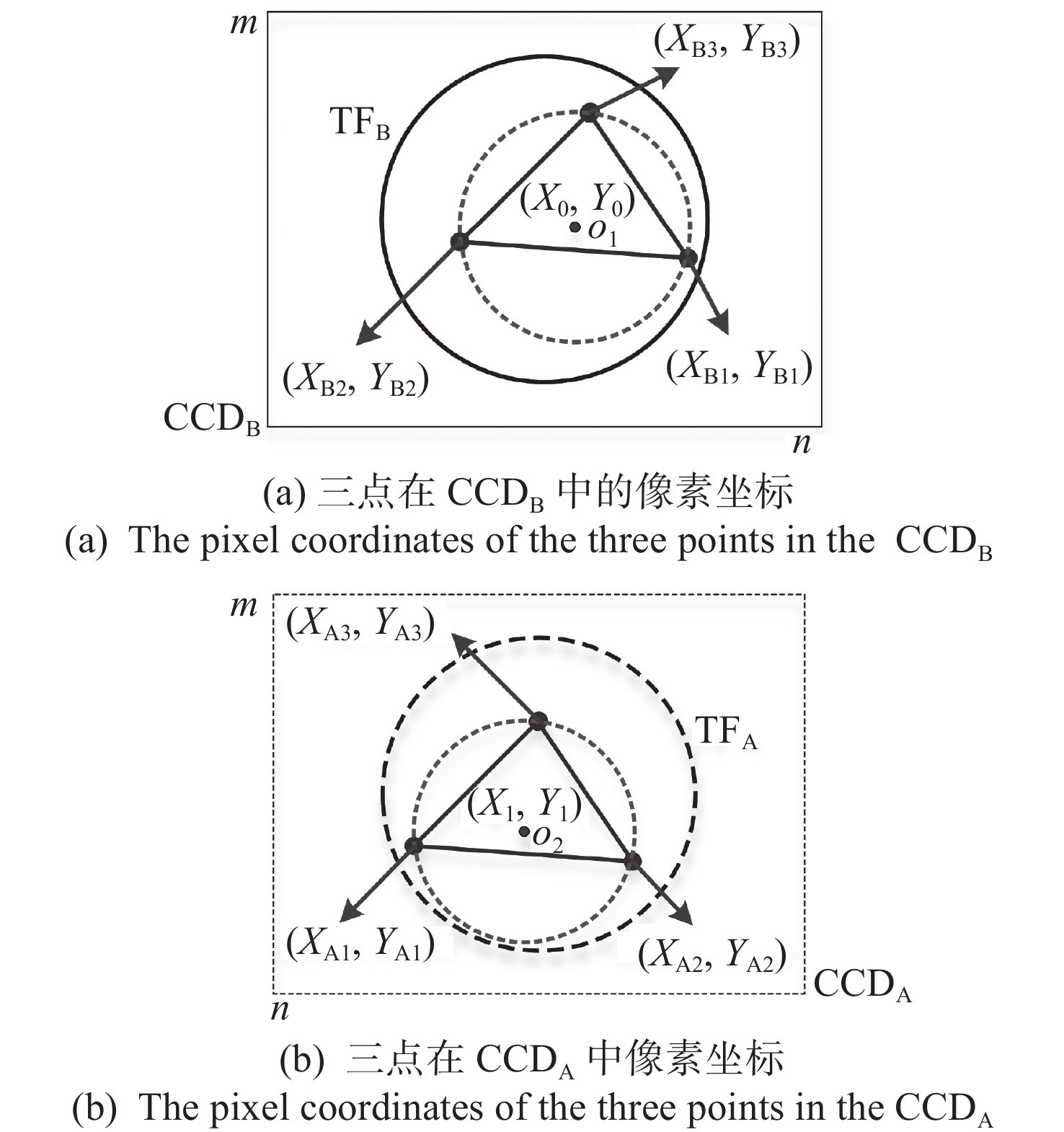
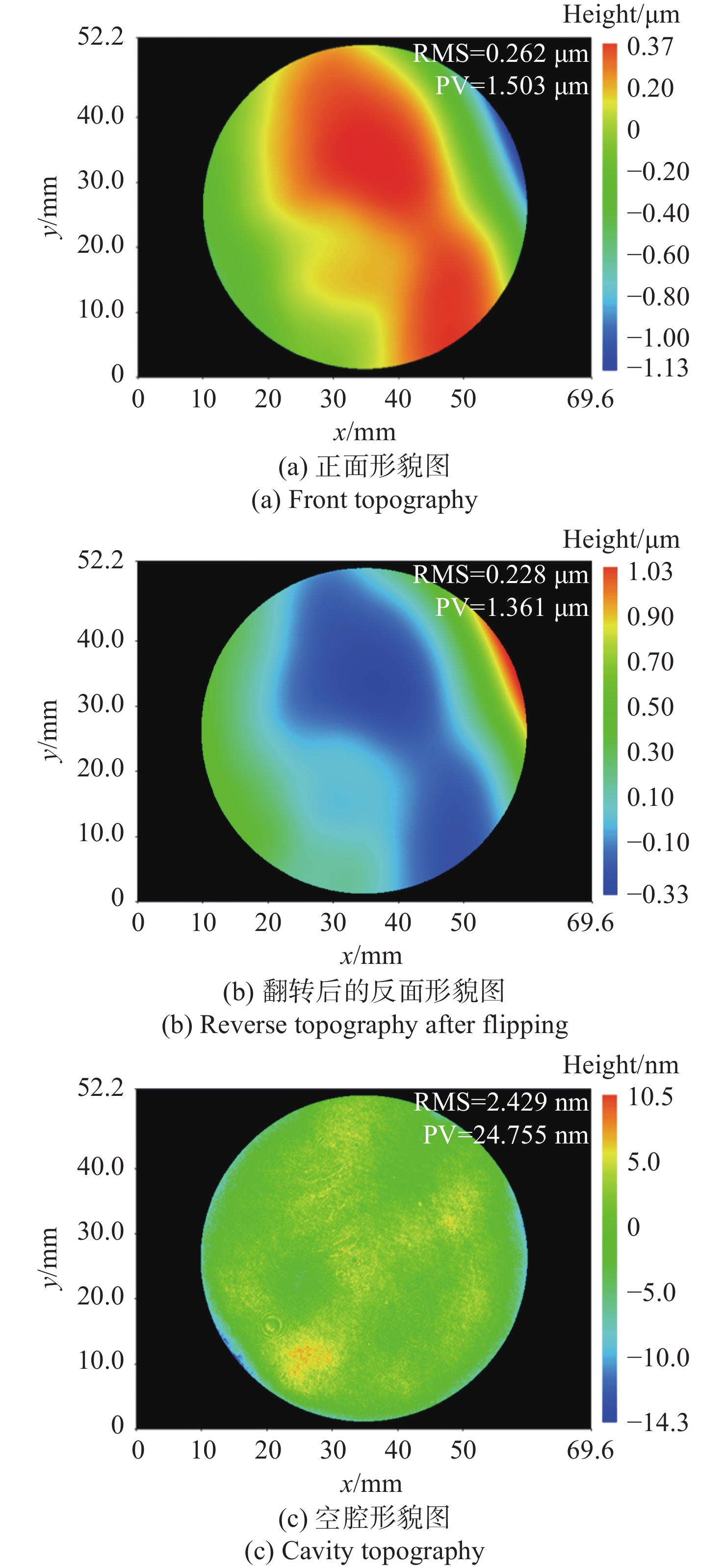
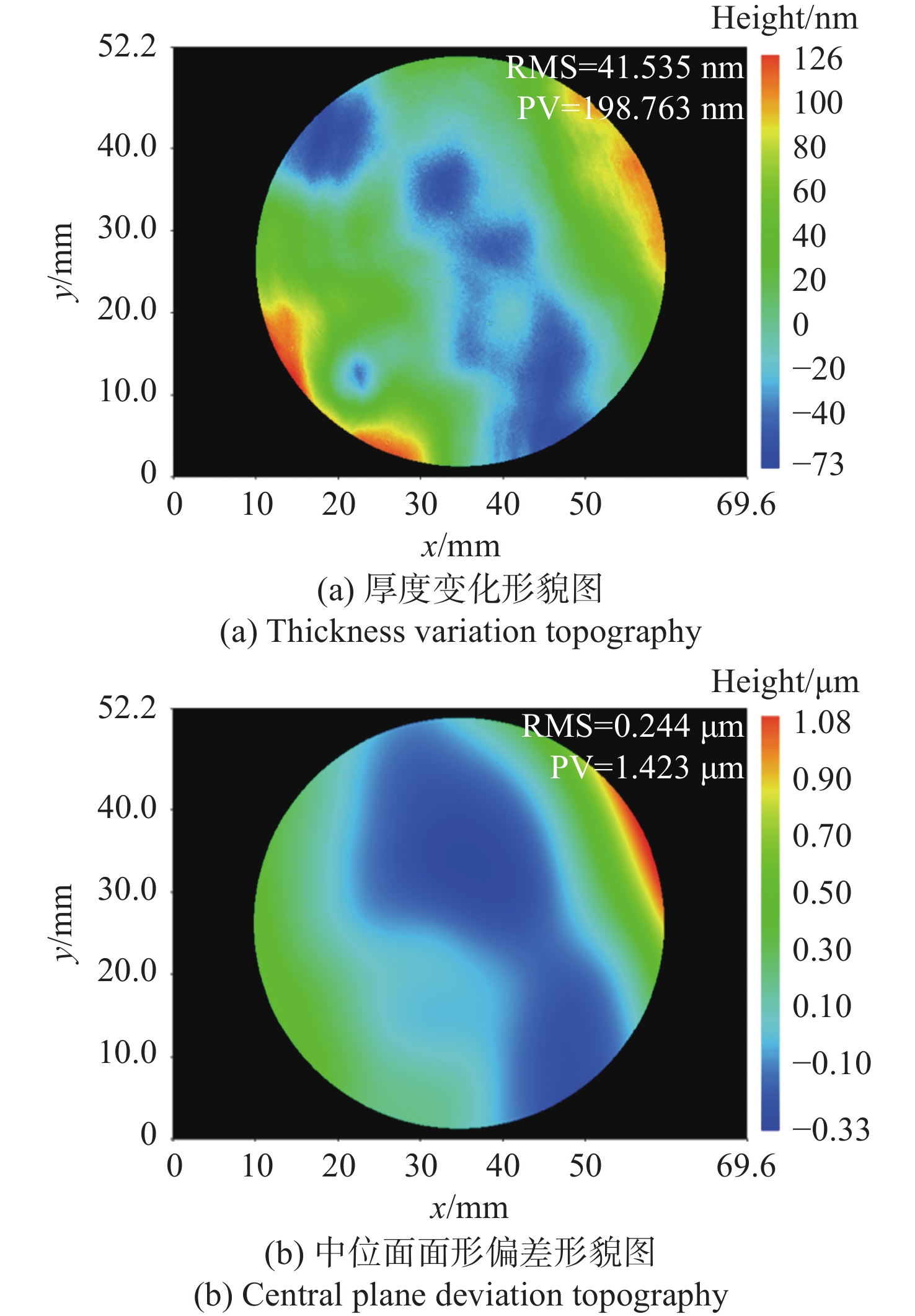
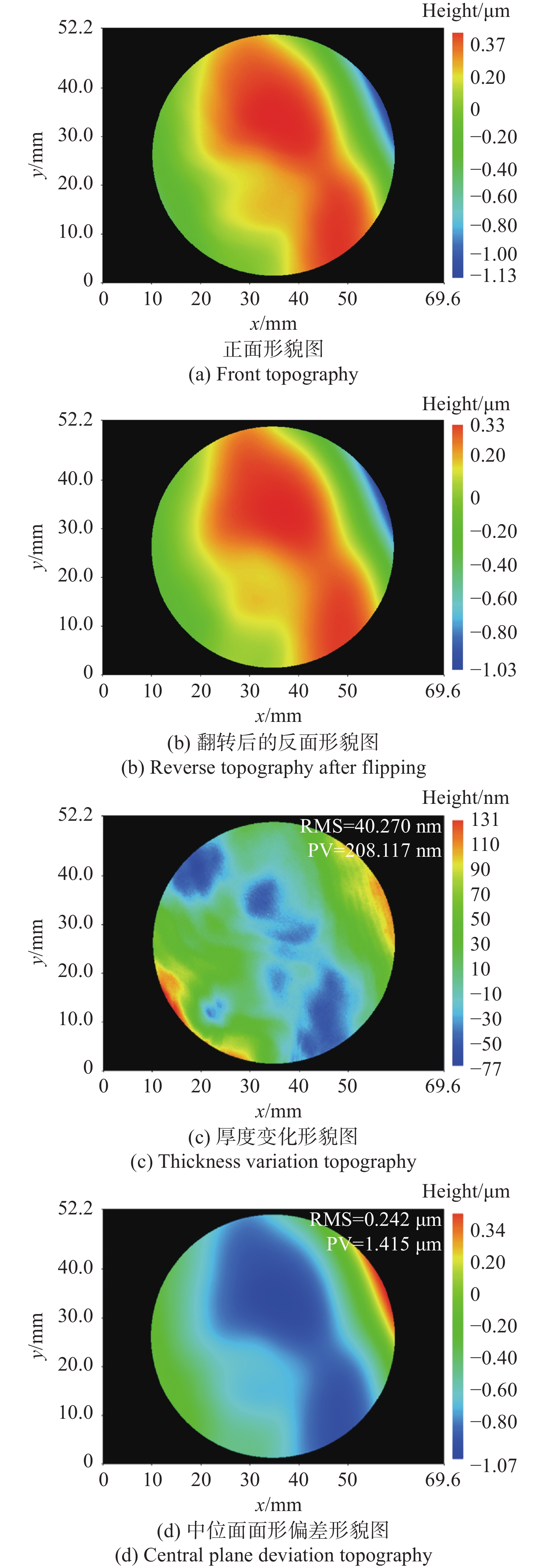
为了实现双面抛光晶圆总厚度变化(TTV)和变形程度中弯曲度(Bow)和翘曲度(Warp)的测量,提出了一种干涉测量方法。采用两个带有标准镜的菲索式相移干涉仪对晶圆正反面同时进行测量,将测量所得晶圆正反面形貌与未放置晶圆时两个干涉仪的空腔形貌进行组合运算,可得到不受标准镜误差影响的双面抛光晶圆的表面相关参数。在组合运算中,由于两个标准镜未精确对准会产生映射误差,影响相关参数的测量结果。针对这一问题,在晶圆测量之前,将三点定位装置固定在两个标准镜之间,基于三点定圆定理不断调整两个标准镜的位置,可使映射误差极小,进而减小映射误差对测量结果的影响。实验结果表明,50 mm晶圆横向和纵向的映射误差分别为21.592 μm和37.480 μm,TTV、弯曲度和翘曲度分别为0.198 μm、−0.326 μm和1.423 μm。为了进一步验证调整方法的有效性,采用单个干涉仪对晶圆进行翻转测量,由测量结果可知晶圆的TTV、弯曲度和翘曲度分别为0.208 μm、−0.326 μm和1.415 μm。所提干涉法在调整好两个标准镜的位置后,可以方便快速的用于大批量大尺寸晶圆的测量,提高了晶圆的检测效率,同时具有较高的测量精度。





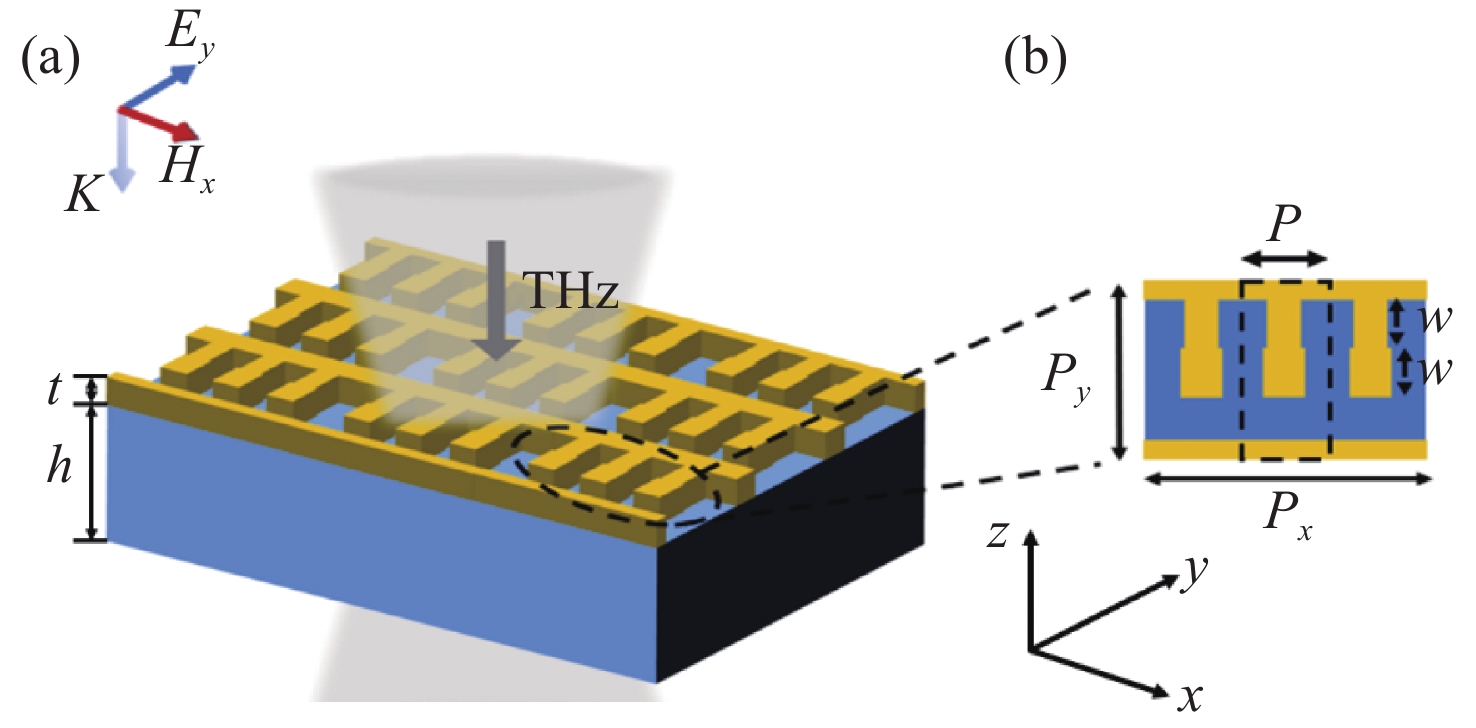
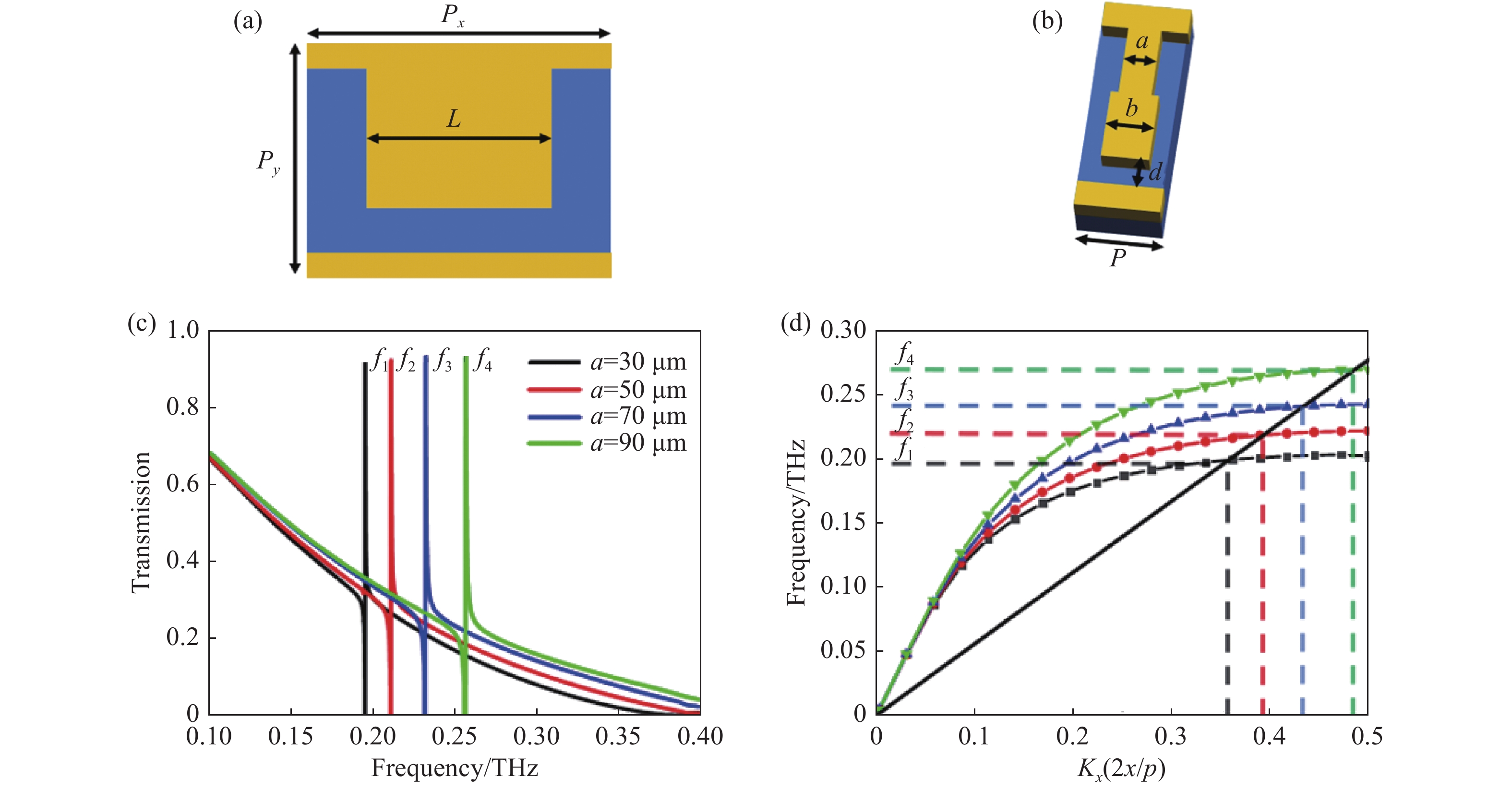
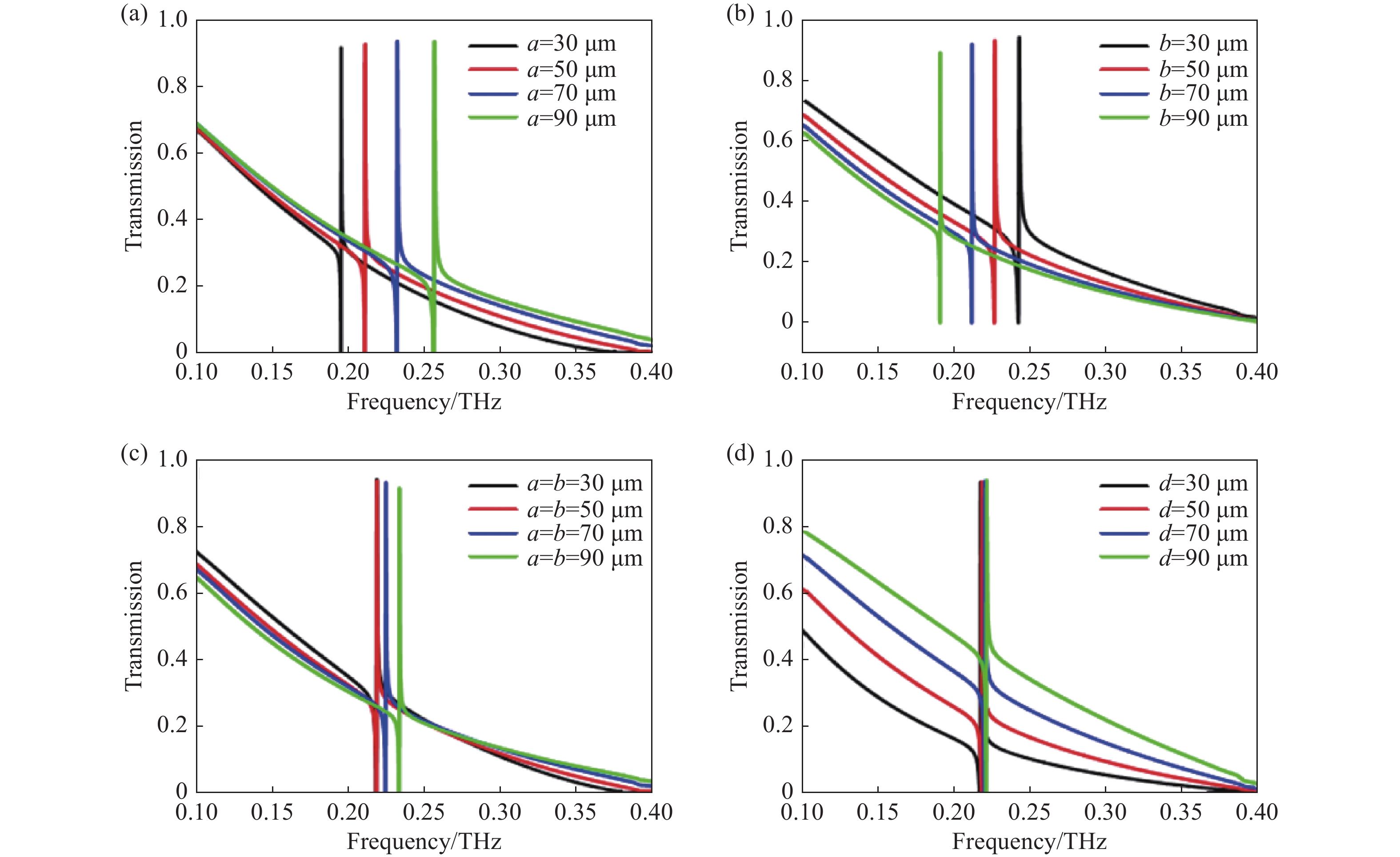
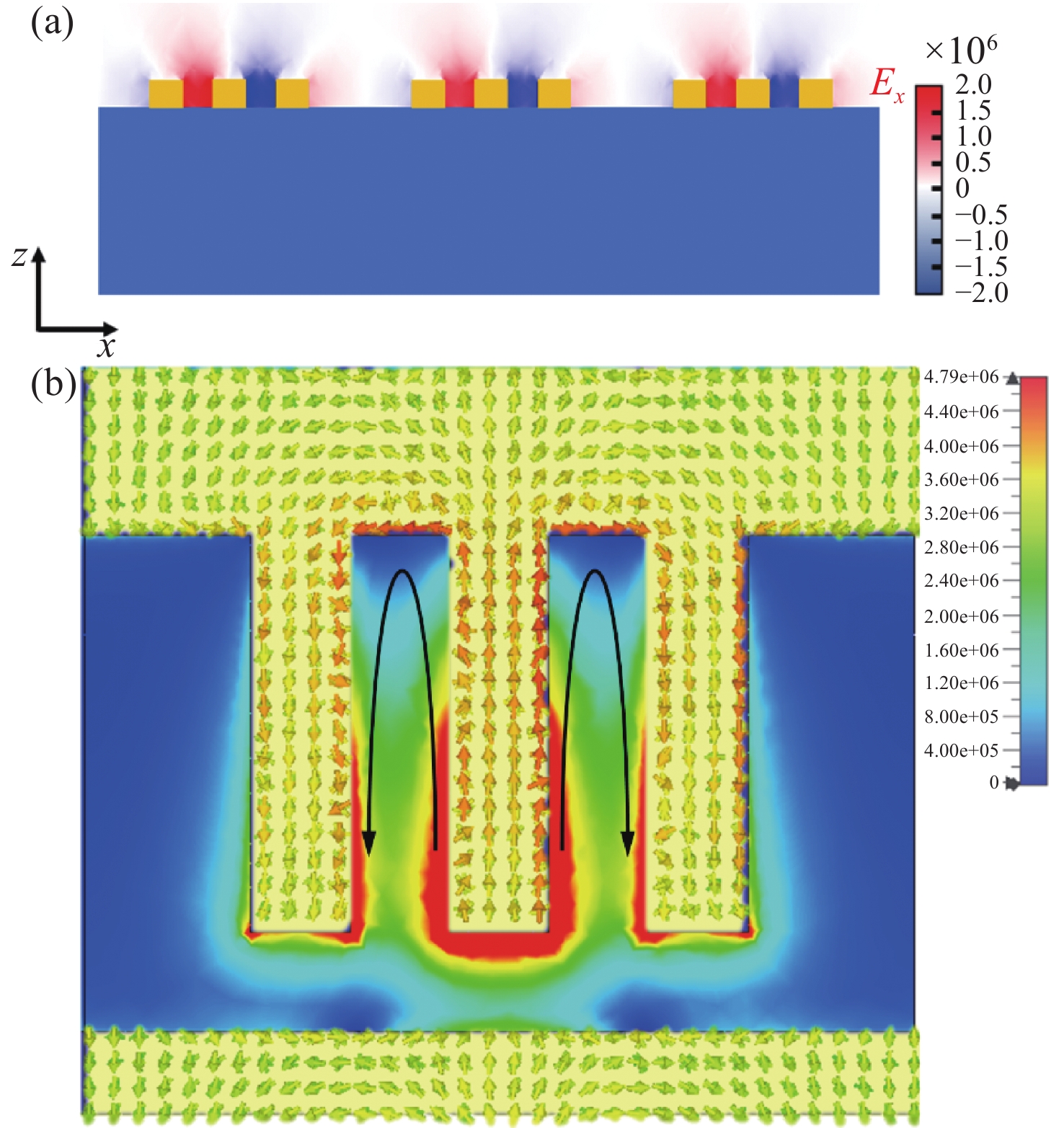
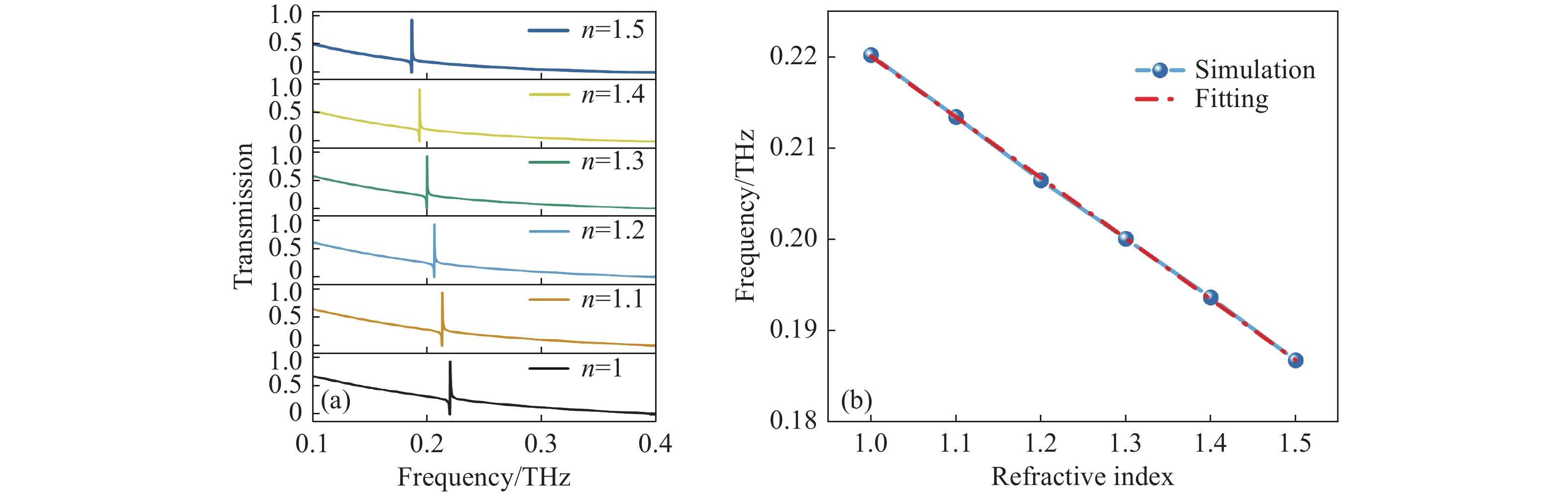
本文提出使用单层光栅超表面结构耦合的方式实现太赫兹人工表面等离子体激元(SSP)共面激发,克服了通过介质耦合器在实际应用时需要反射测量等缺点。在单层金属结构上同时构造周期性光栅和太赫兹SSP复合结构,当太赫兹波垂直入射时,可实现光栅波矢和SSP波矢相匹配,激发SSP模式,在透射谱中可以产生高

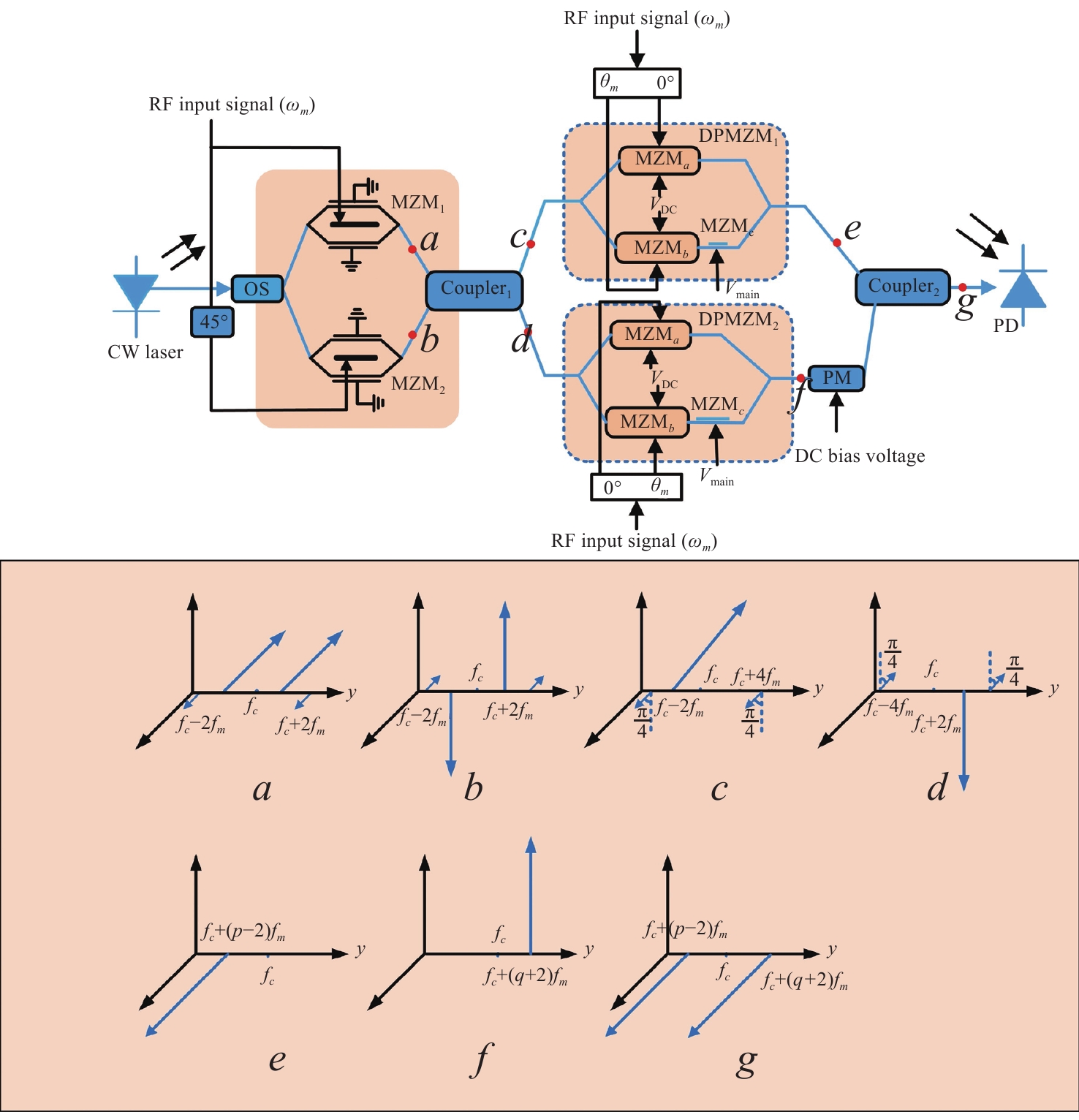
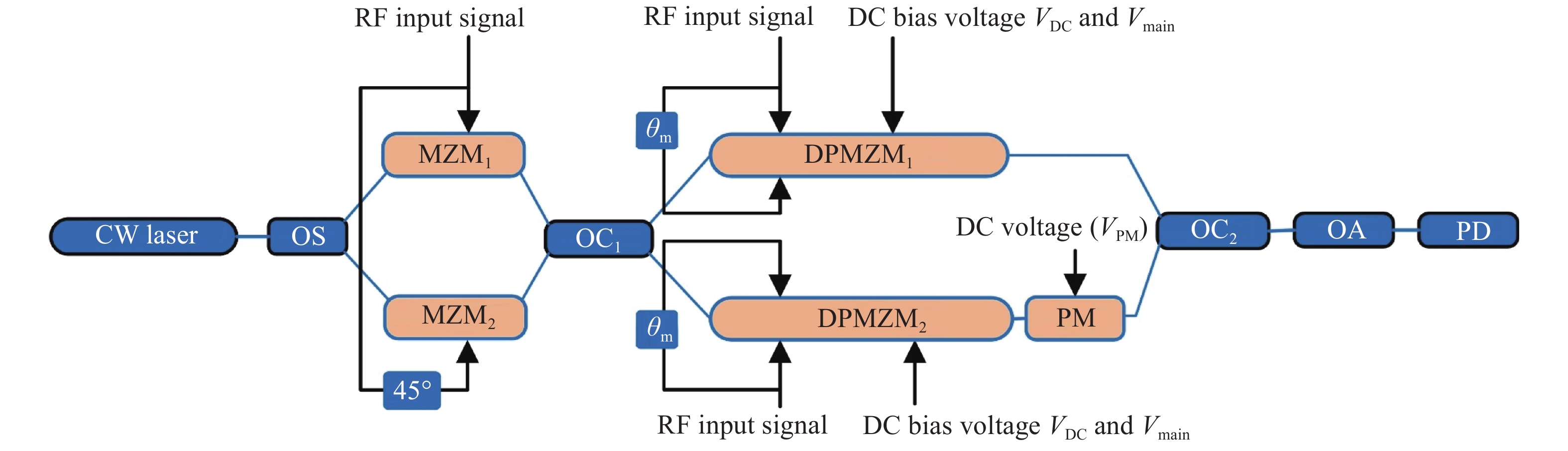
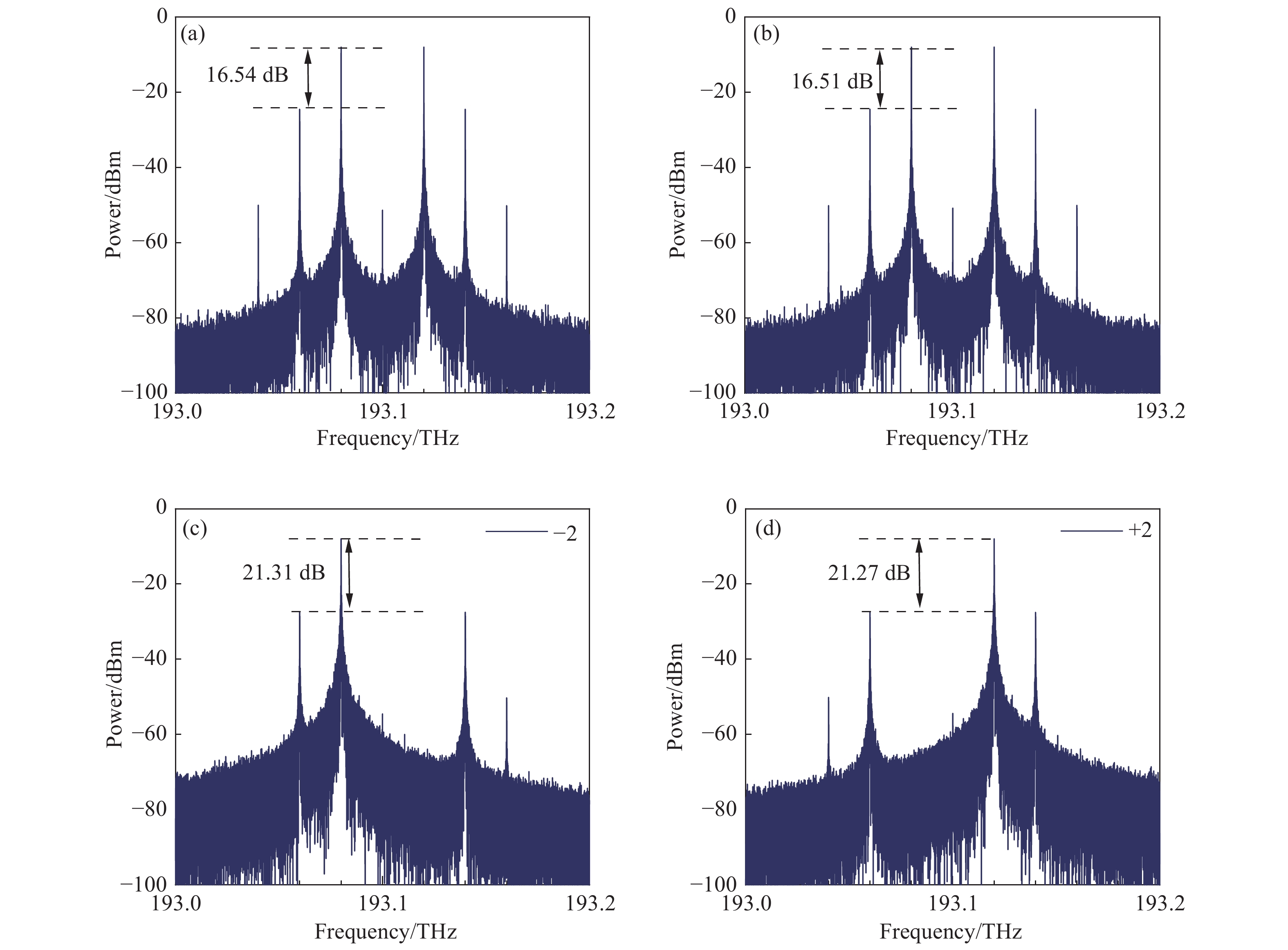
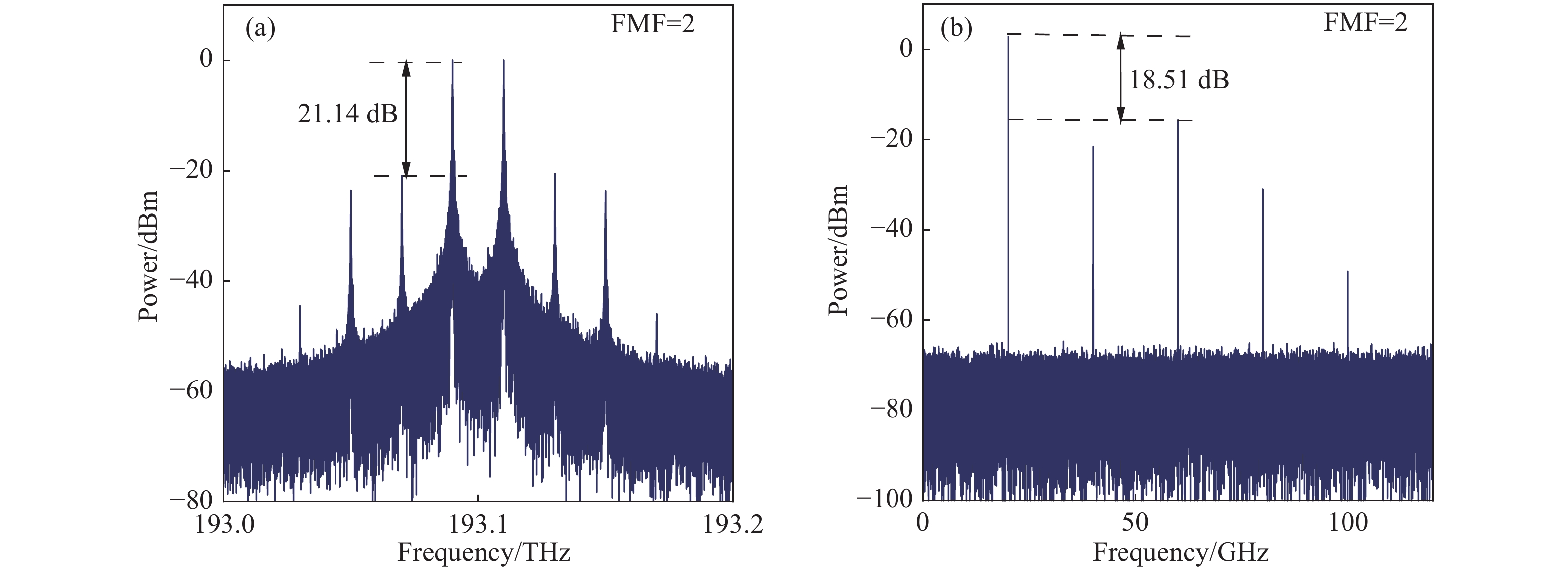
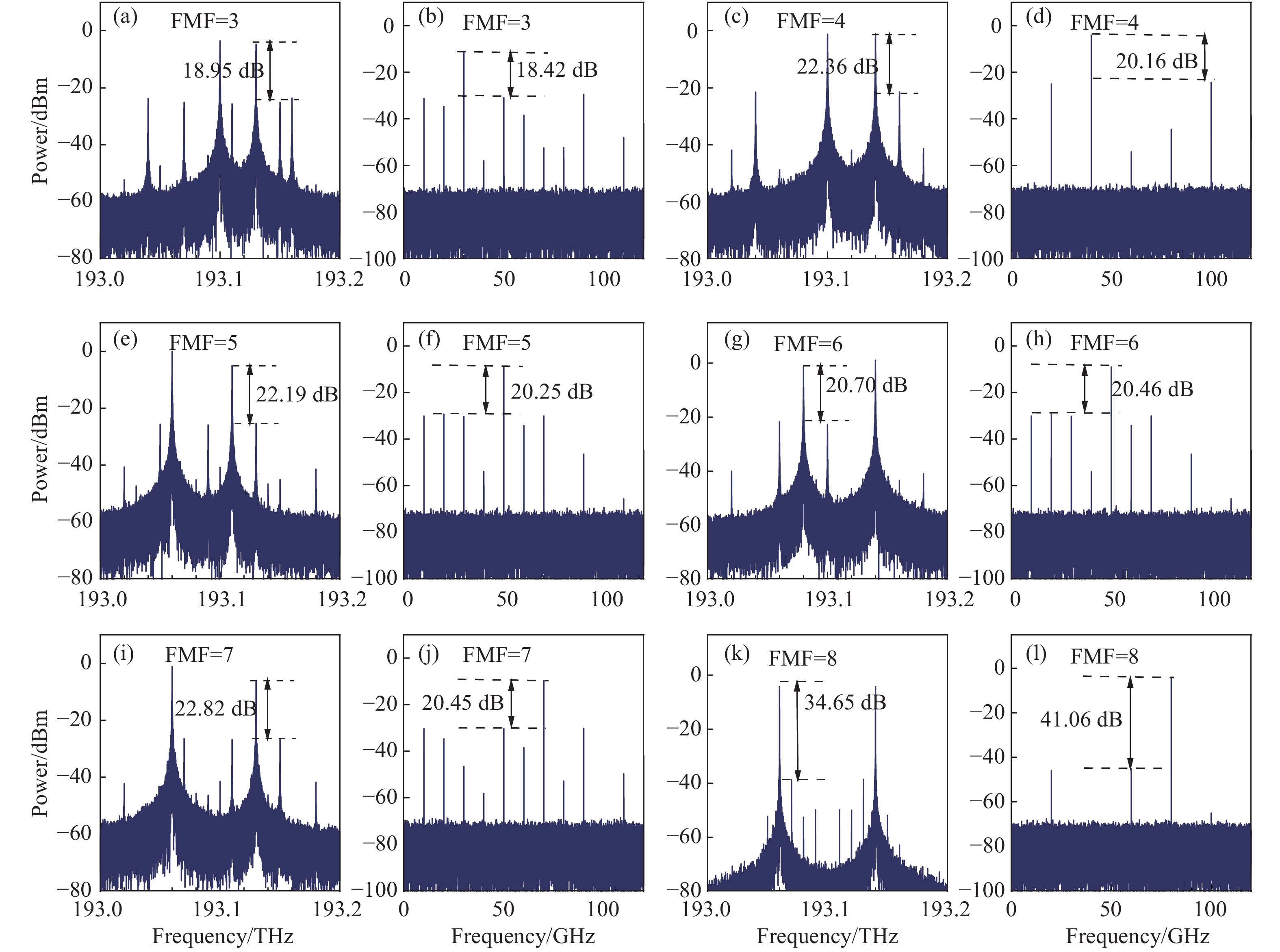
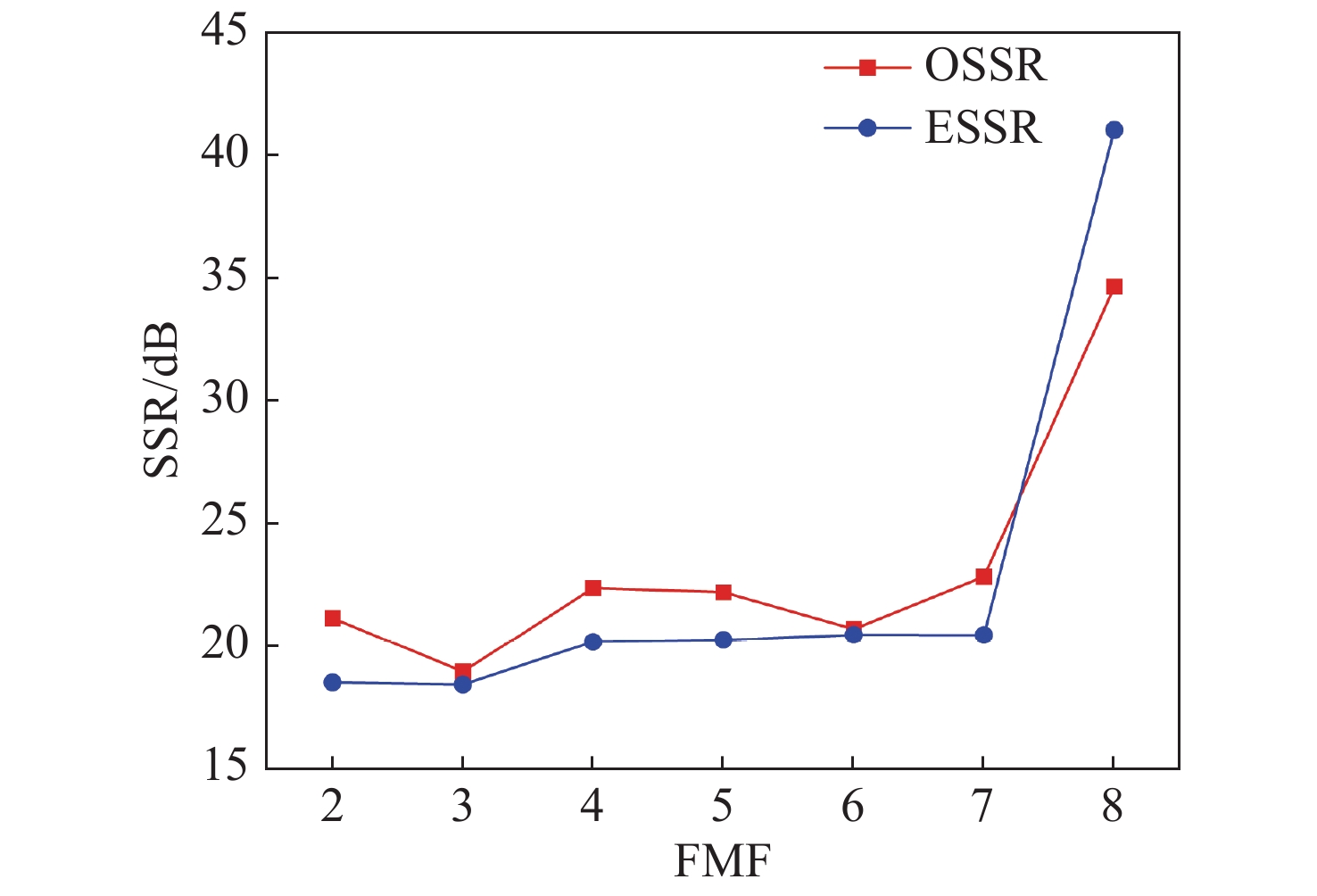
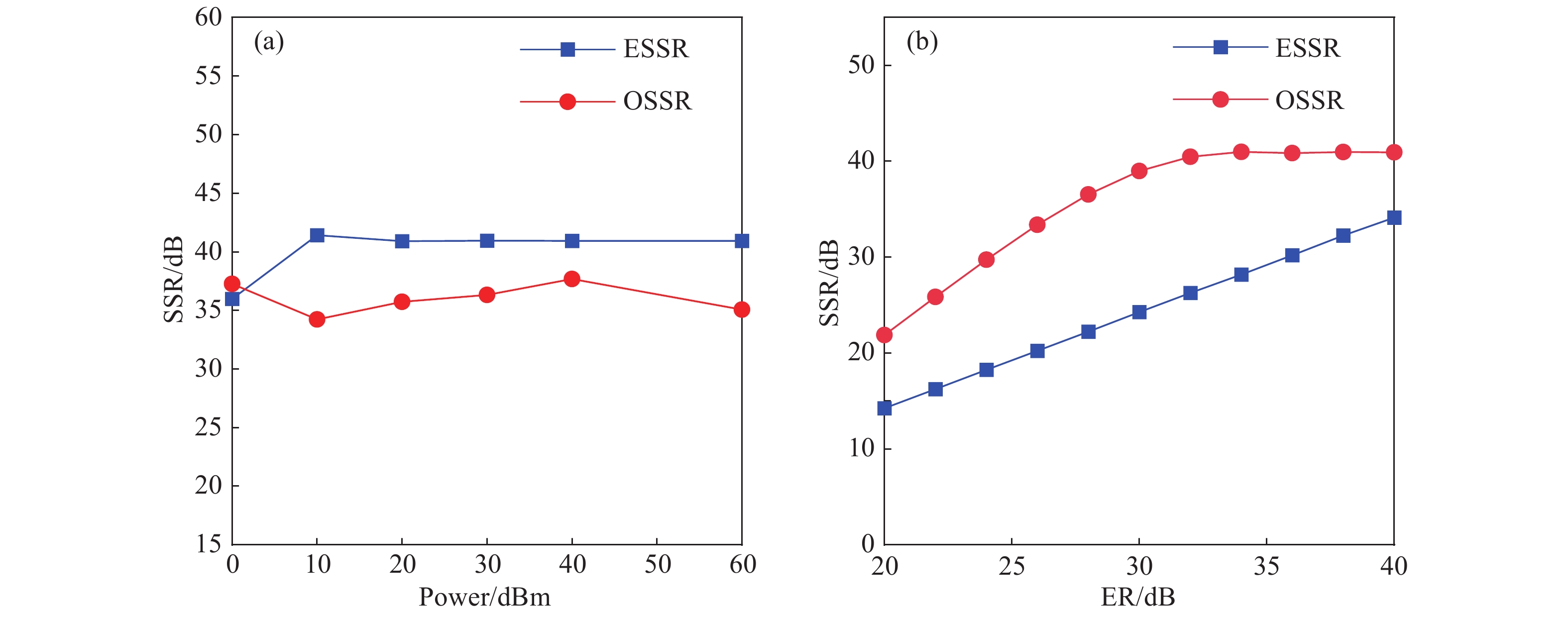
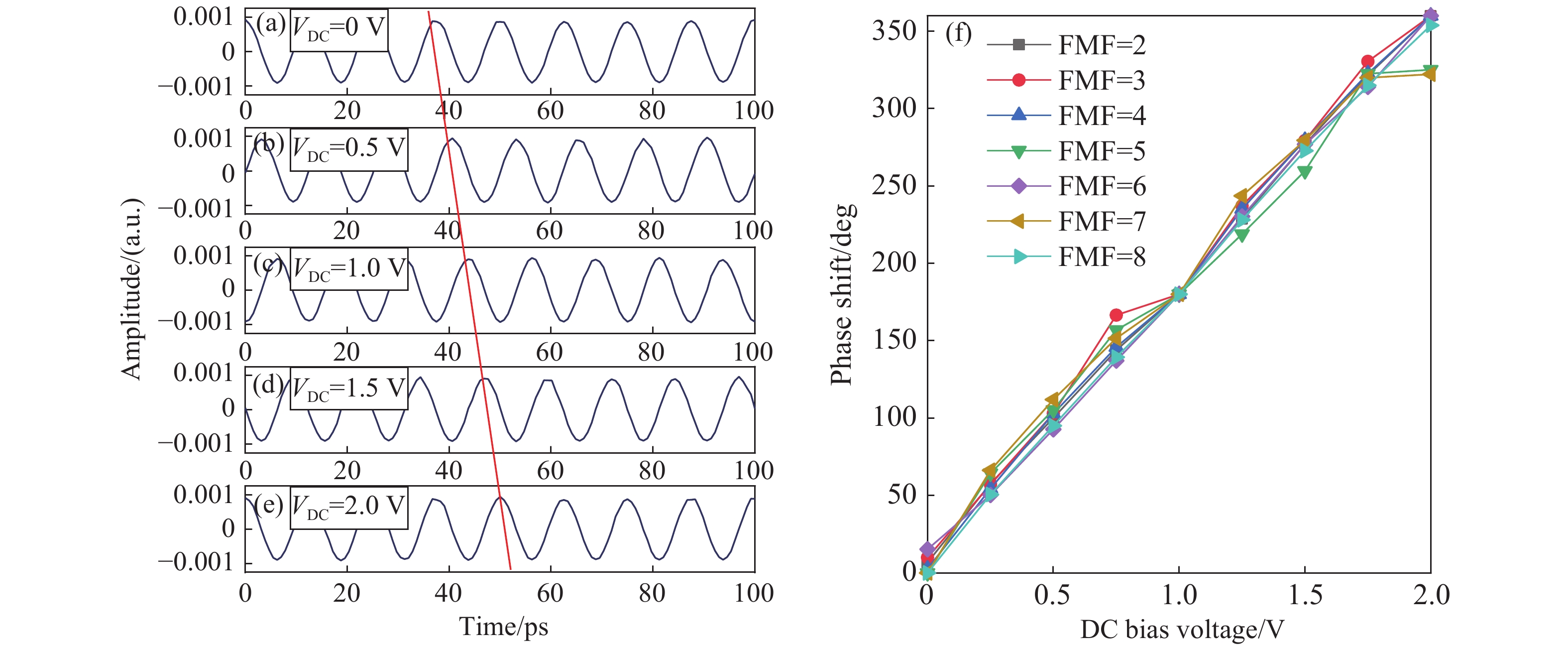
提出一种倍频因子连续可调,且相位连续变化的微波光子移相系统。该方案使用两个并联的马赫曾德尔调制器,通过2×2光耦器与两个双并联的集成马赫曾德尔调制器级联,产生可调节的±1~4阶边带,并使用相位调制器对其中一个光波进行相移。通过调整DPMZM的射频驱动信号和直流偏置电压以及PM的直流电压,可以产生相位从0到360°连续可调的2到8次谐波。仿真结果表明,当射频信号频率为10 GHz时,可产生频率为20~80 GHz的微波信号。当相位调制器的直流偏置电压与半波电压比值在0到2间变化时,对应微波信号的相位从0°到360°变化,可以获得约20 dB的大光边带抑制比(OSSR)和电杂散抑制比(ESSR)。此外,分析了调制器消光比对输出微波信号光载波抑制比和电杂散抑制比的影响,以及光载波的波长和功率对微波信号幅度波动的影响。



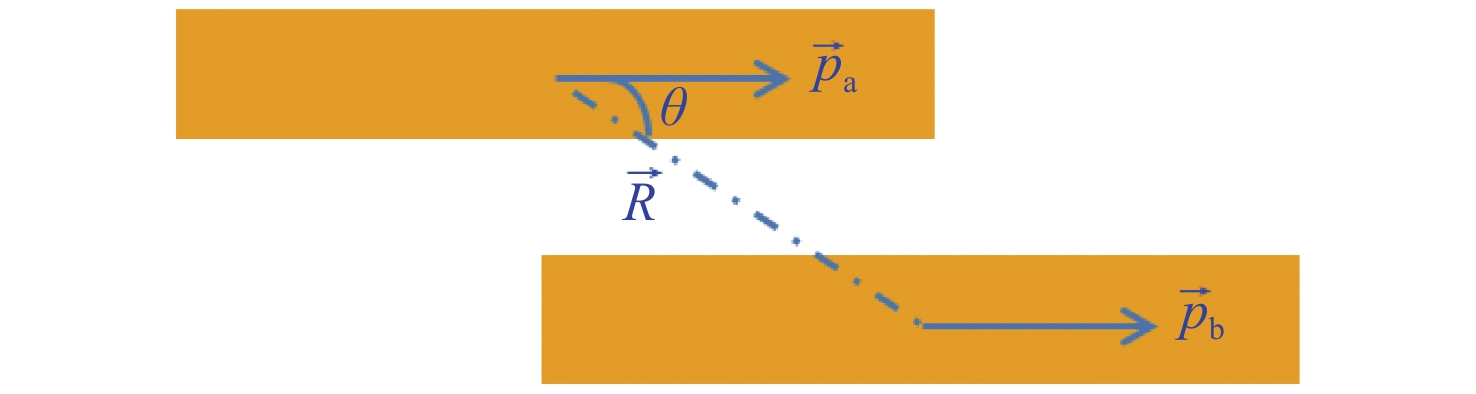
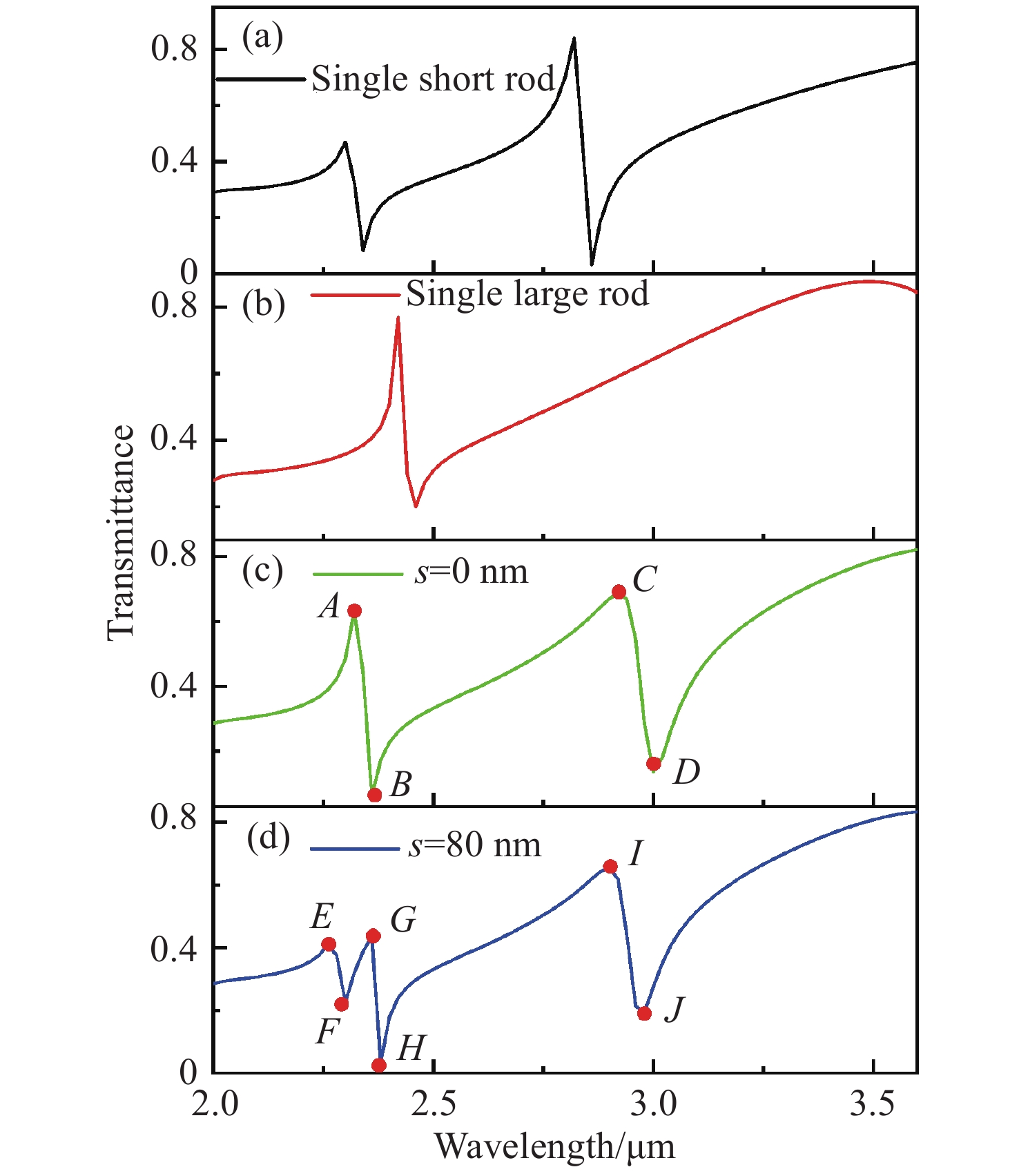
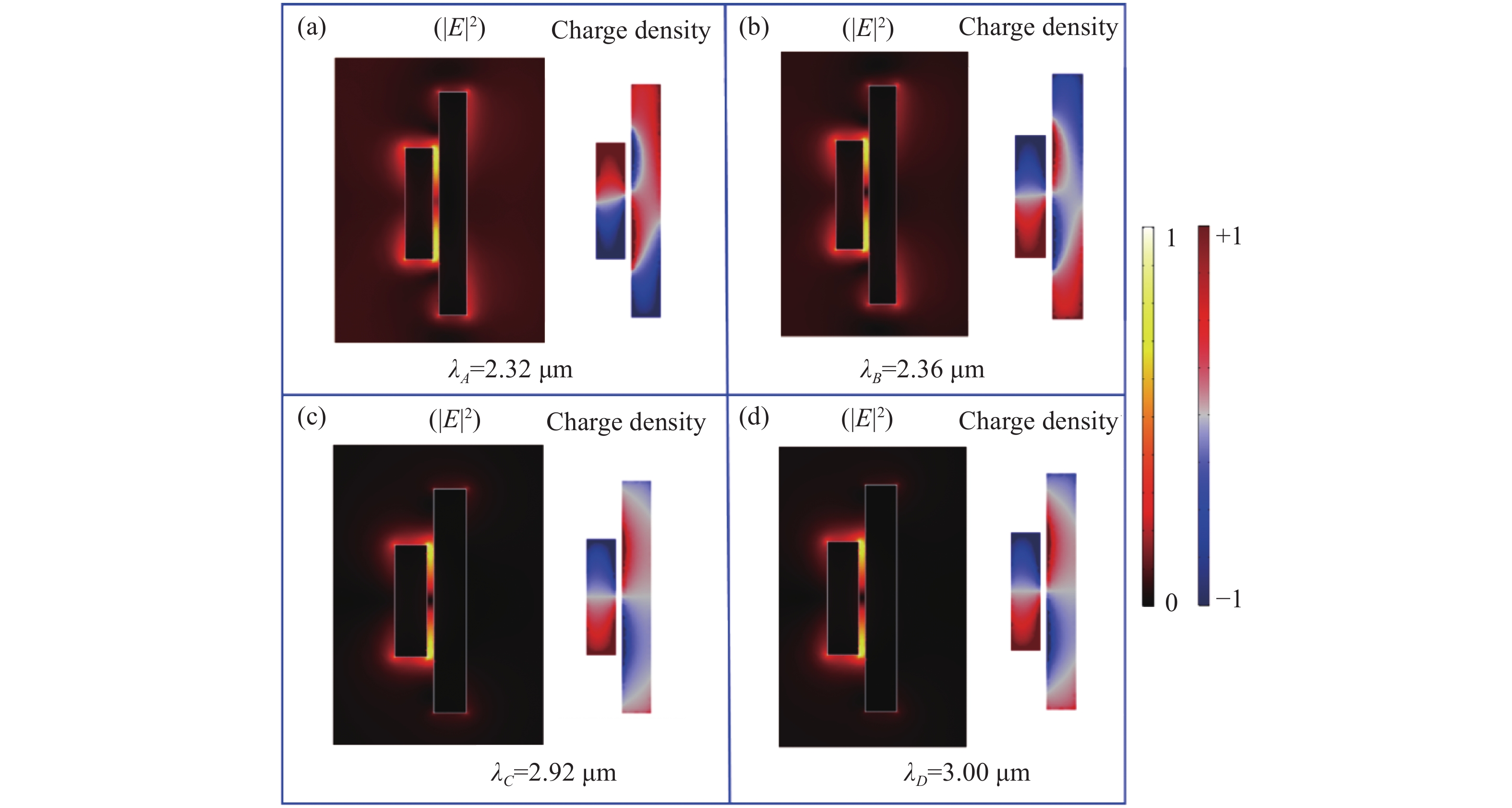
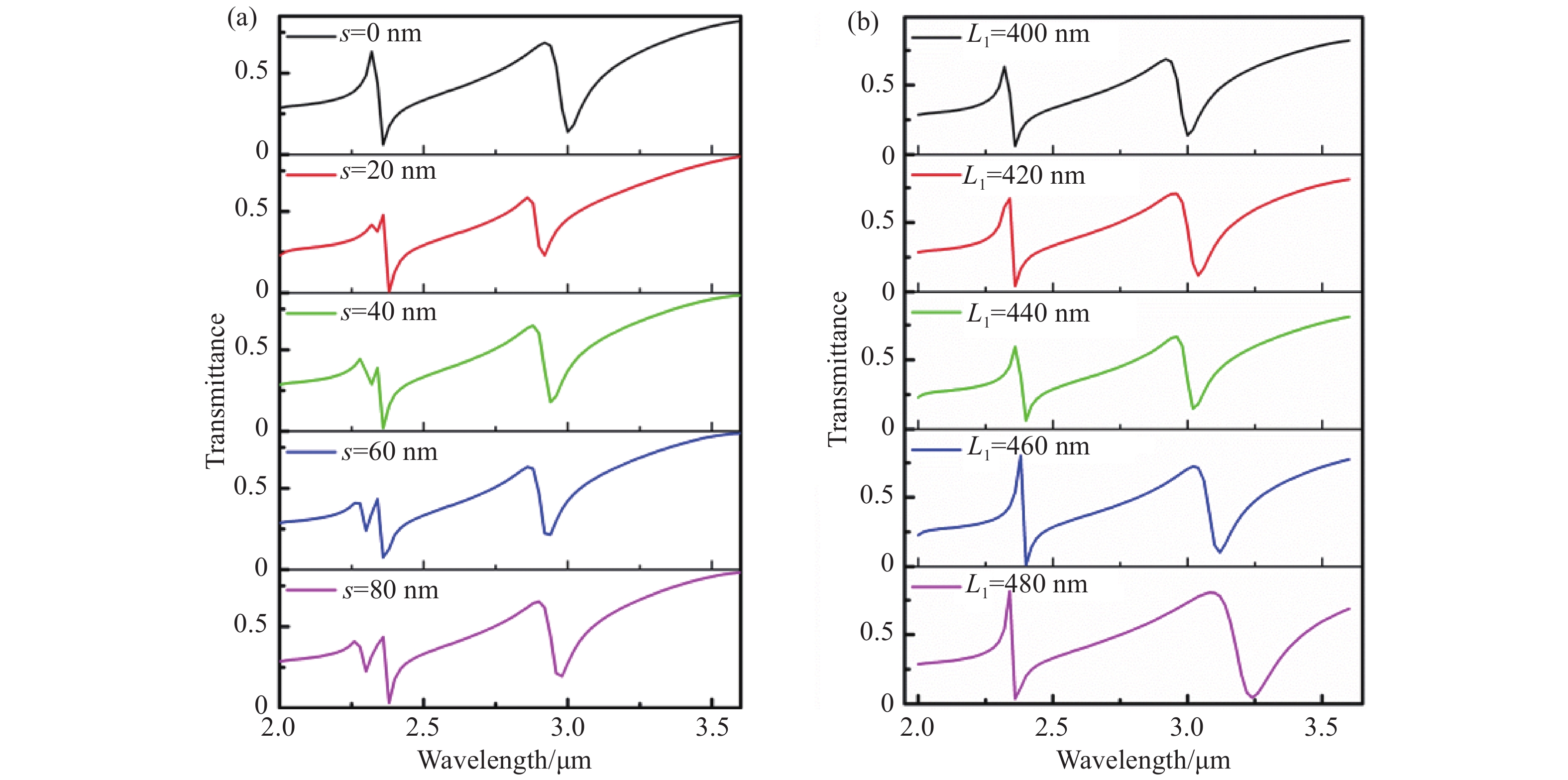
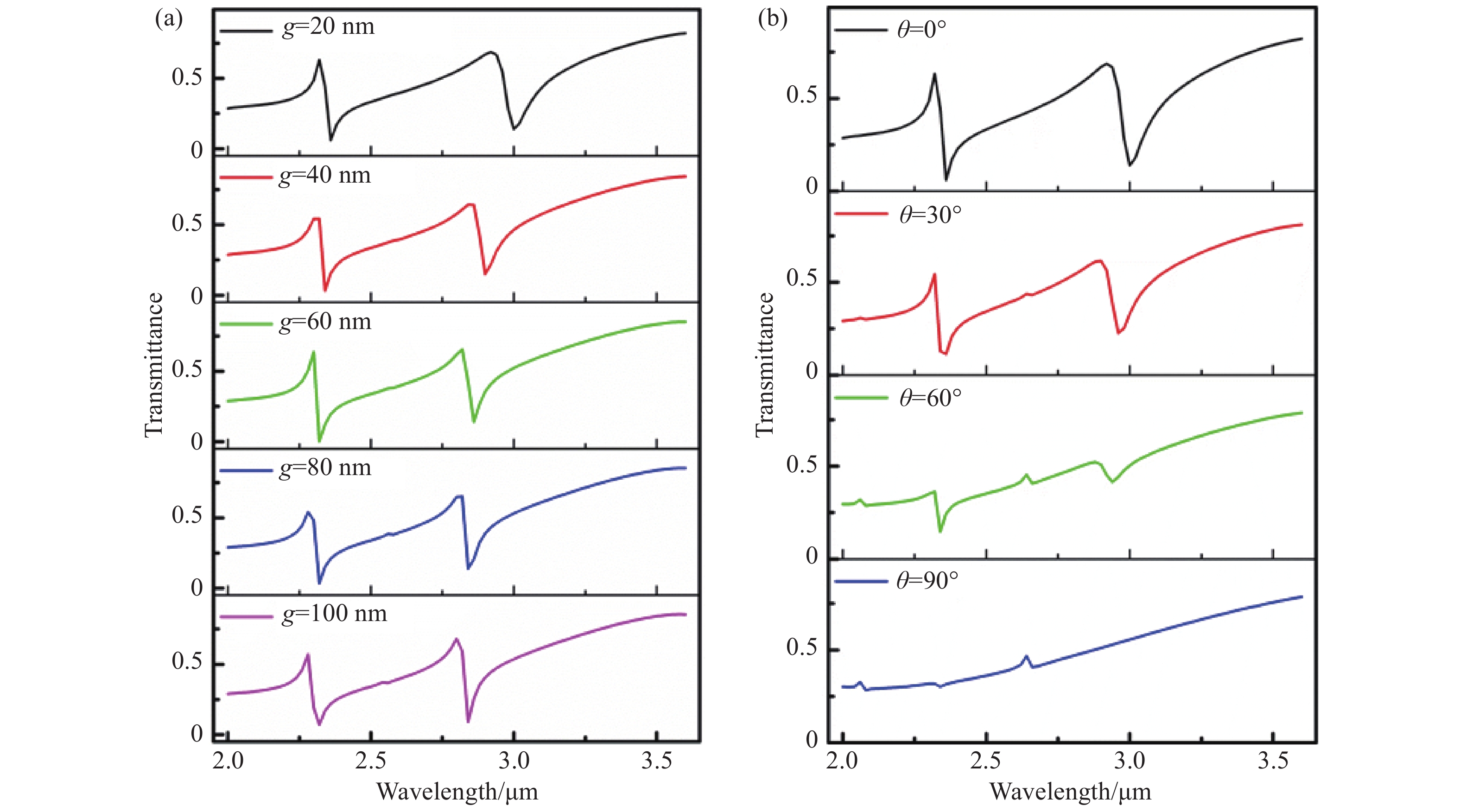
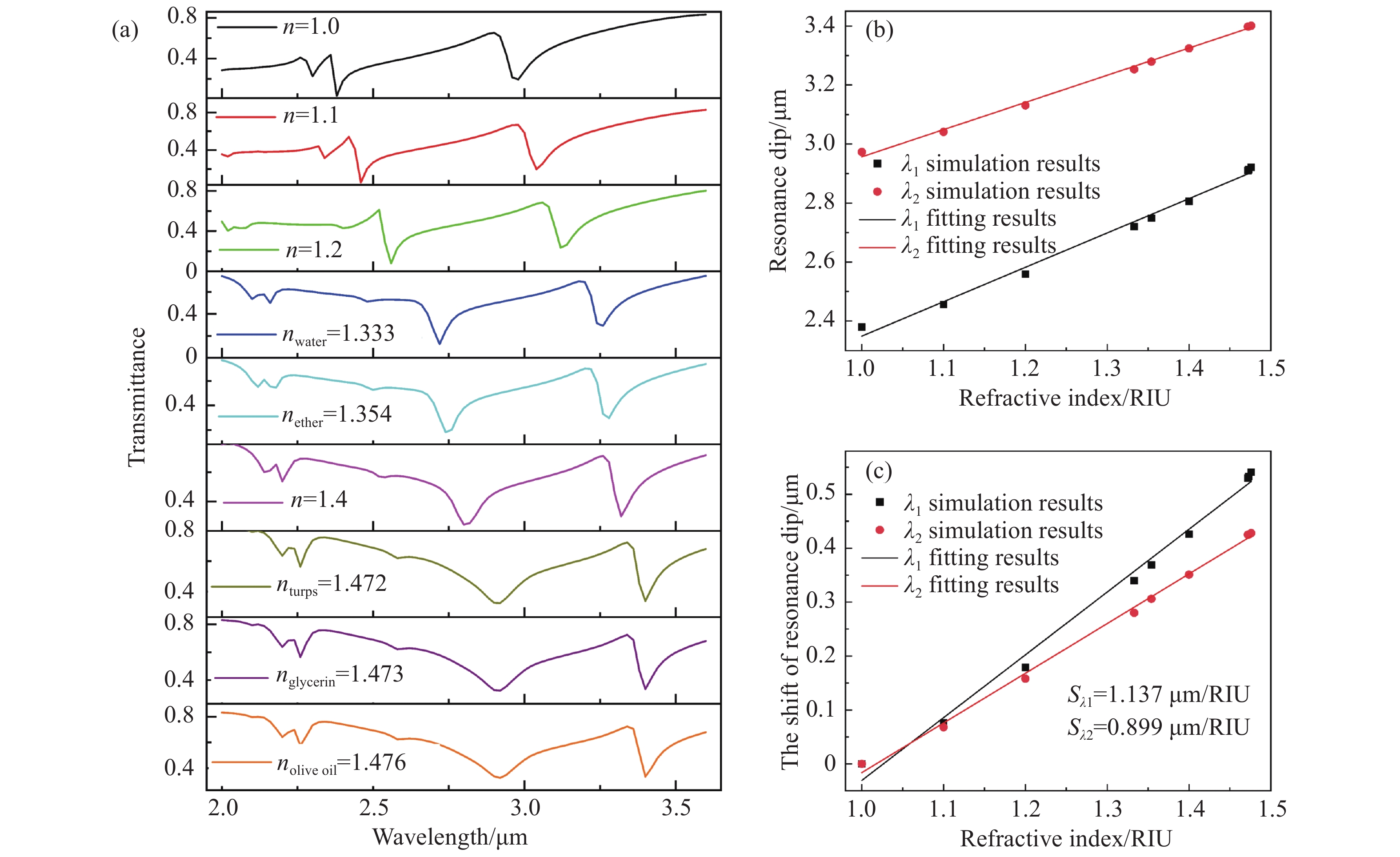
为了研究超表面结构的耦合及折射率传感特性,设计了一种由两种长度不同的纳米棒组成的二聚体结构,并研究该结构的透射光谱,共振峰处的电场和电荷分布以及结构参数对透射光谱的影响。本文采用有限元法对光学性能进行仿真分析,采用准静态逼近模型解释了平行双纳米棒结构的耦合机理。在共振波长上模拟电场分布,分析电子振动模式,在透射光谱中出现了不对称线型的双Fano共振。结果表明,双Fano共振是由纳米棒和衬底之间的耦合作用产生的,可以通过结构参数和周围介质的折射率来调控,且基于Fano共振的折射率灵敏度最大可达1.137 μm/RIU。这些研究结果为设计等离激元传感器提供了理论依据。