


-
摘要: 大口径空间巡天望远镜的精确平场定标是实现既定科学目标的重要前提。目前普遍是通过平场屏幕或大口径积分球提供均匀平场基准来检验像面响应一致性。针对平场屏幕照明均匀性差,超大口径积分球制备困难等问题,本文提出了一种基于子孔径扫描的平场定标方法,以改善平场基准的均匀性及杂散光导致的定标不确定度。首先,完成子孔径平场定标理论分析,建立子孔径平场定标数学模型,规划子孔径扫描路线及扫描孔径大小,进行标定用准直系统参数的初设计。其次,完成像面照度仿真验证实验。最后,搭建实验平台,对规划的子孔径进行扫描,构建全口径照度数据,验证上述大口径空间巡天望远镜子孔径拼接平场定标方案的可行性。实验结果表明:以全口径为基准,用子孔径拼接法扫描待测系统像面能量叠加对比全口径像面照度,能够恢复全口径的照度信息,全口径像面灰度值为231.085,单个子孔径叠加灰度值为233.350,误差为1%,本文研究表明子孔径拼接法可用于大口径巡天望远镜的平场定标,具有实际应用价值。Abstract: The accurate flat-field calibration of large-diameter space survey telescopes is an important prerequisite for achieving some established scientific goals. At present, it is common practice to provide a uniform flat-field reference through a flat-field screen or a large-diameter integrating sphere, which is used to check the consistency of an image’s plane response. To address issues with the uniformity of flat-field screen illumination and the difficulty of preparing large-size integrating spheres, a flat-field calibration method based on sub-aperture scanning is proposed in this paper, which improves the uniformity of the flat-field reference and the uncertain calibration caused by stray light. First, we complete a sub-aperture flat-field calibration theory analysis, establish a sub-aperture flat-field calibration mathematical model, plan the sub-aperture scanning route and scan aperture size, and perform the initial design of the parameters of the collimation system for calibration. Secondly, we complete the image surface illumination simulation verification experiment. Finally, we set up an experiment to scan the planned sub-apertures, build full-aperture illuminance data, and verify the feasibility of the above-mentioned large-aperture space survey telescope sub-aperture stitching flat-field calibration scheme. The experimental results show that the full-aperture illuminance information can be restored using the full-aperture stitching method to scan the image surface energy of the system and by using the sub-aperture stitching method to compare and contrast the full-aperture image surface illuminance. The superimposed gray value in our experiment was 233.350 and the error was 1%. It is therefore verified that the sub-aperture stitching method can be used for flat-field calibration of large-diameter sky survey telescopes, and has practical value in real-world applications.
-
Key words:
- large diameter /
- flat-field calibration /
- survey telescope /
- sub-aperture stitching
-

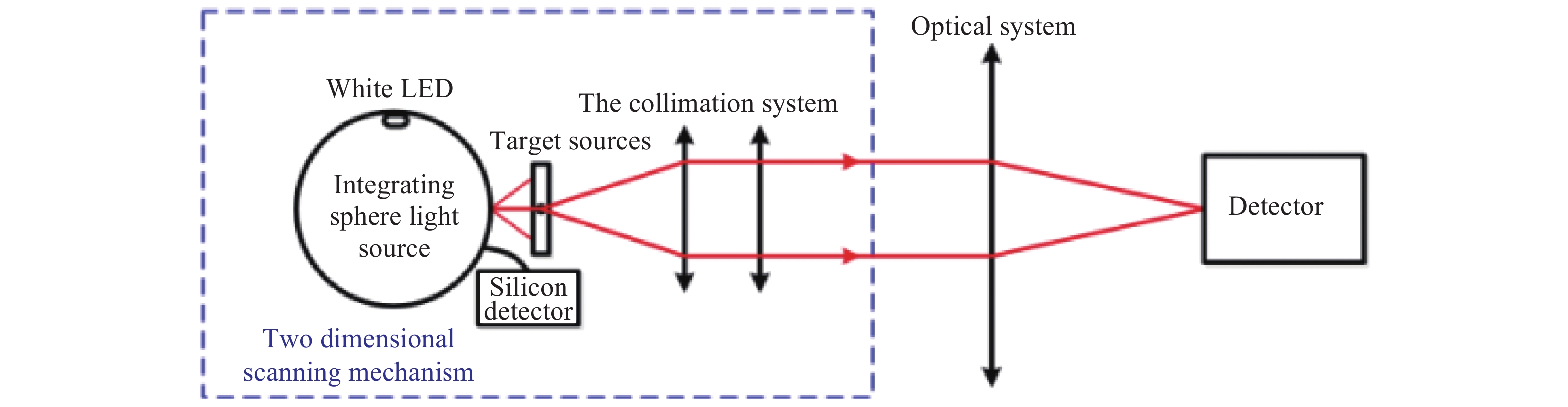
图 6 准直系统出射光照度分布示意图
Figure 6. Schematic diagram of luminance distribution of collimating system

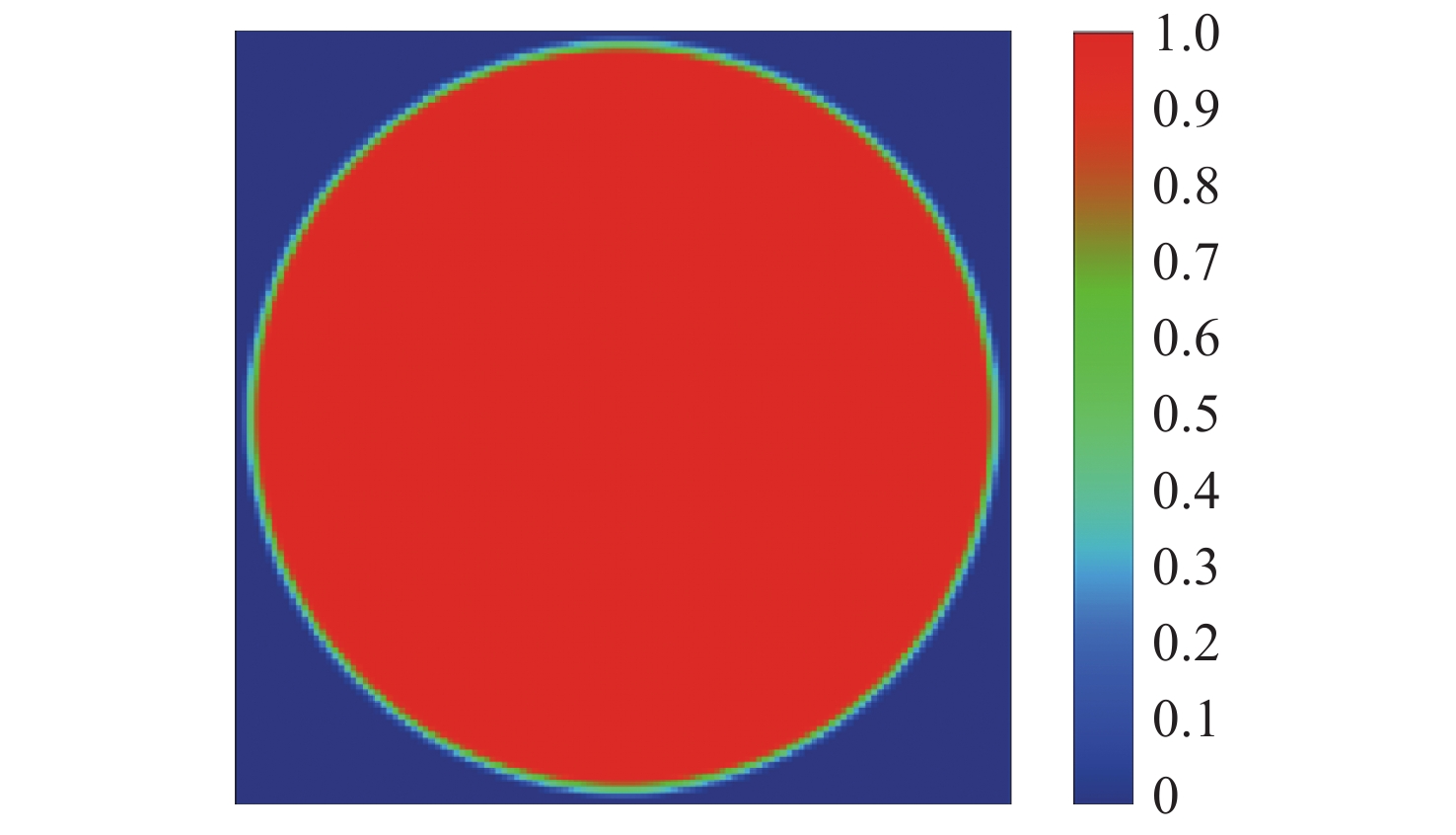
图 7 全视场照度均匀分布示意图
Figure 7. Schematic diagram of uniform distribution of full field illumination

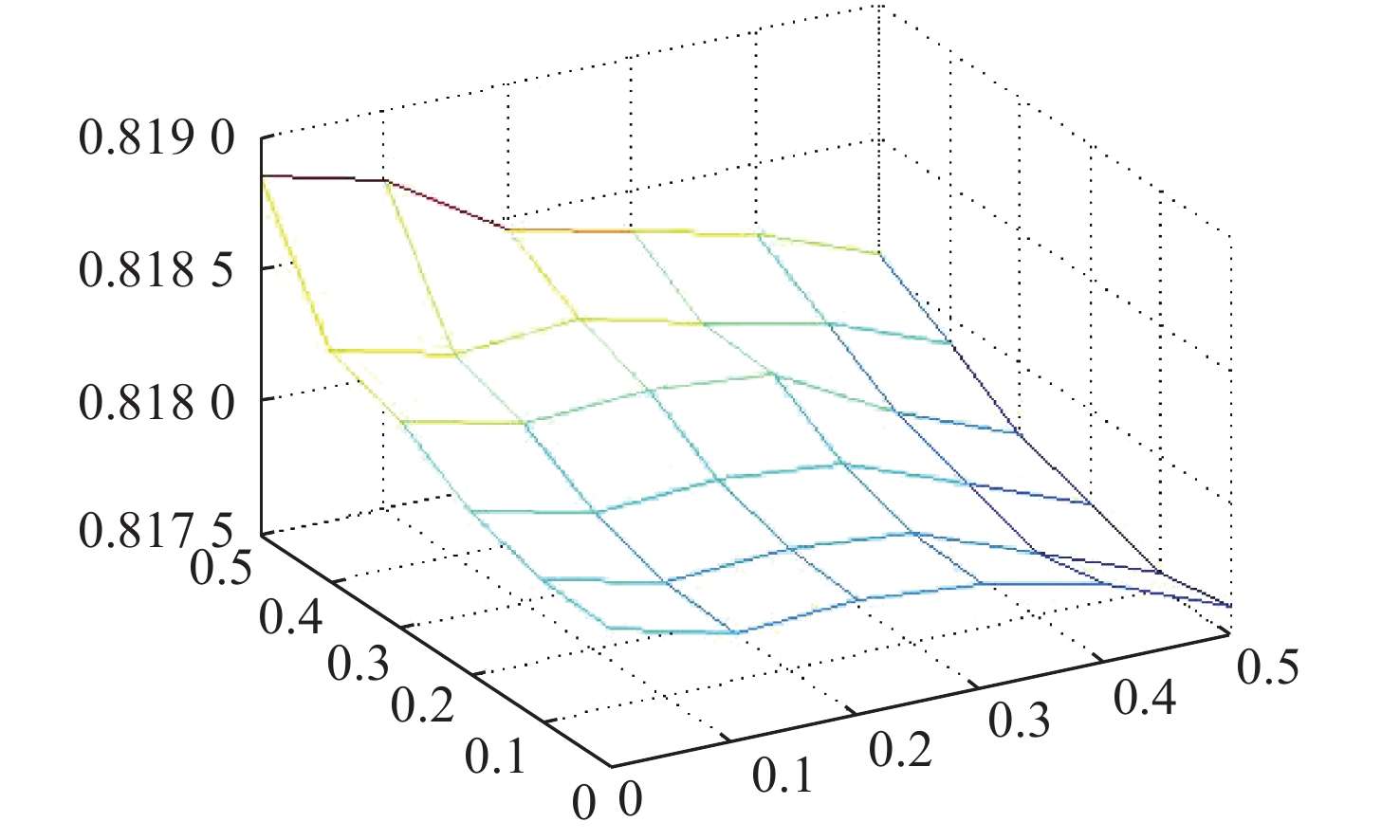
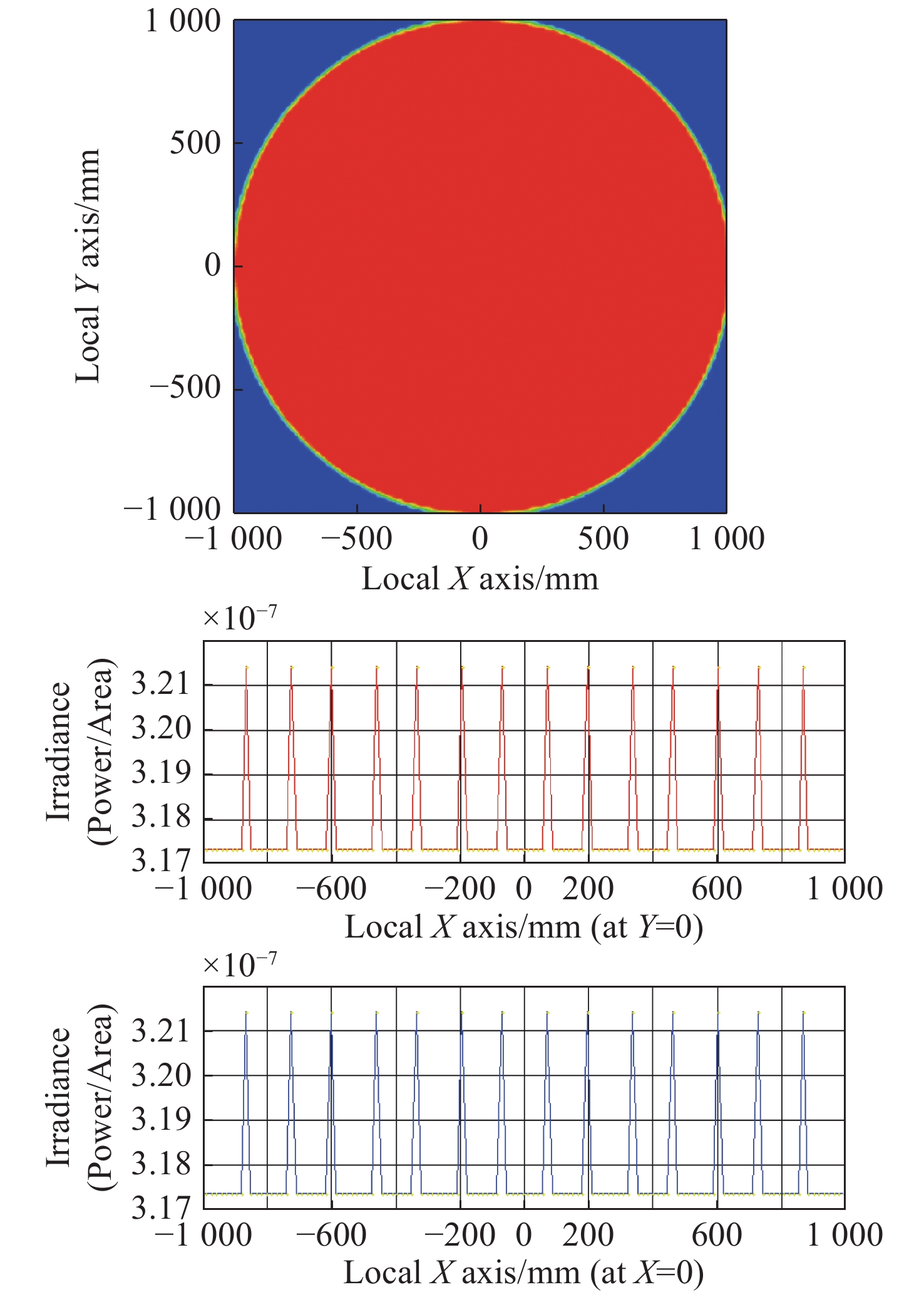
图 9 全口径扫描像面照度仿真分析
Figure 9. Simulation diagram of illumination of full-aperture scanning image surface

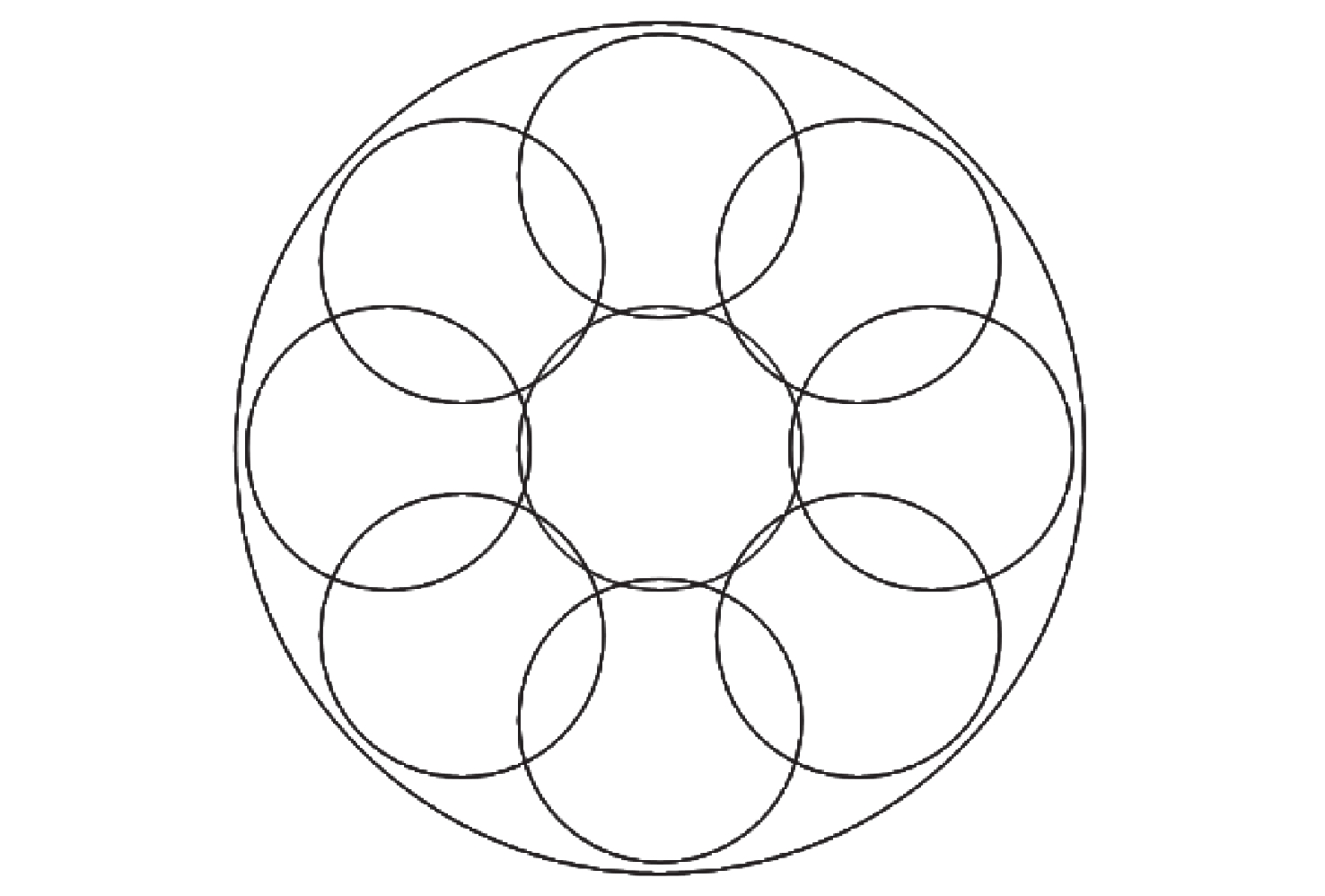
图 12 子孔径扫描分布关系示意图
Figure 12. Schematic diagram of distribution relation of subaperture scanning

图 13 全口径像面CCD采集原始图像
Figure 13. Original image captured by full aperture image plane CCD

图 14 子孔径像面CCD采集原始图像
Figure 14. Original image captured by the sub-aperture image plane CCD
表 1 准直系统的设计参数
Table 1. Design parameters of collimation system
序号 设计参数 具体参数值 1 焦距/mm 2500 2 口径/mm 250 3 F数 10 4 视场大小/mm 2.2  下载: 导出CSV
下载: 导出CSV
表 2 实验设备及性能参数
Table 2. Experimental equipment and performance parameters
序号 设备名称 性能参数 1 光源(白光LED) 功率 5 W 2 积分球 开口直径2 mm 3 平行光管 口径150 mm;焦距1600 mm 4 分划板 孔大小为2 mm 5 光阑 尺寸 150 mm
透光口直径 50 mm6 待测光学系统 尼康镜头:口径 150 mm
焦距 800 mm
像面尺寸 8.8 mm×6.6 mm7 探测器 感光芯片尺寸8.5 mm×7.1 mm
像元尺寸3.45 μm8 便携式计算机 安装采集软件
下载: 导出CSV
表 3 实验结果
Table 3. Experimental results
DN值 第一次 第二次 第三次 灰度值均值 ${x_1}$ 26.3921 26.3988 26.1971 $\overline {\sum\limits_{ {{i} } = 1}^{n = 9} { {x_{{i} } } } } = 224.375$ ${x_2}$ 26.3783 26.2942 26.3126 ${x_3}$ 25.8061 25.7738 25.8077 ${x_4}$ 26.3755 26.3671 26.380 ${x_5}$ 24.4763 24.4263 24.4239 ${x_6}$ 26.4038 26.3946 26.3548 ${x_7}$ 23.9231 23.9123 23.8842 ${x_8}$ 25.8316 25.8114 25.8091 ${x_9}$ 25.7138 25.7318 25.6758 ${x_0}$ 231.301 233.110 230.845 $\overline {{x_{\simfont\text{全}}}} {\rm{ = 231}}{\rm{.085}}$
下载: 导出CSV
-
[1] SEBAG J, GRESSLER W J, LIANG M, et al.. Calibration systems for LSST[R]. Tucson, AZ: National Optical Astronomy Observatory, 2014: 85719. [2] 施建荣. LAMOST望远镜[J]. 科学通报,2016,61(12):1330-1335. doi: 10.1360/N972015-00975SHI J R. The large sky area multi-object fiber spectroscopic telescope[J]. Chinese Science Bulletin, 2016, 61(12): 1330-1335. (in Chinese) doi: 10.1360/N972015-00975 [3] 赵永恒. 大规模天文光谱巡天[J]. 中国科学: 物理学力学天文学,2014,44(10):1041-1048.ZHAO Y H. Large-scale astronomical spectroscopic surveys[J]. Scientia Sinica Physica, Mechanica & Astronomica, 2014, 44(10): 1041-1048. (in Chinese) [4] 郝钟雄. 天文望远镜现状及发展趋势[J]. 现代科学仪器,2007(5):30-34. doi: 10.3969/j.issn.1003-8892.2007.05.008HAO ZH X. Status and trends of astronomical telescope[J]. Modern Scientific Instruments, 2007(5): 30-34. (in Chinese) doi: 10.3969/j.issn.1003-8892.2007.05.008 [5] 赵晓熠. 超大口径凝视相机定标方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2010.ZHAO X Y. The study of riadiometric calibration for staring camera with large diameter[D]. Harbin: Harbin Institute of Technology, 2010. (in Chinese) [6] 岳巾英, 李素文, 何玲平. 一种基于非均匀目标的空间相机平场定标方法[J]. 光学仪器,2016,38(1):35-40. doi: 10.3969/j.issn.1005-5630.2016.01.008YUE J Y, LI S W, HE L P. A flat field calibration method of space camera based on a non-uniform target[J]. Optical Instruments, 2016, 38(1): 35-40. (in Chinese) doi: 10.3969/j.issn.1005-5630.2016.01.008 [7] 江孝国, 张开志, 李成刚, 等. 图像平场校正方法的扩展应用研究[J]. 光子学报,2007,36(9):1587-1590.JIANG X G, ZHANG K ZH, LI CH G, et al. Extended applications of image flat-field correction method[J]. Acta Photonica Sinica, 2007, 36(9): 1587-1590. (in Chinese) [8] 任建伟, 刘则洵, 万志, 等. 离轴三反宽视场空间相机的辐射定标[J]. 光学 精密工程,2010,18(7):1491-1497.REN J W, LIU Z X, WAN ZH, et al. Radiometric calibration of off-axis three-mirror-anastigmat space camera with wide viewing field[J]. Optics and Precision Engineering, 2010, 18(7): 1491-1497. (in Chinese) [9] RHEAULT J P, DEPOY D L, MARSHALL J L, et al.. DECal: a spectrophotometric calibration system for DECam[C]. SPIE Astronomical Telescopes Instrumentation, 2013 [10] 李东景, 于平, 齐心达. 星上定标积分球系统的设计[J]. 光电子技术,2011,31(1):57-62. doi: 10.3969/j.issn.1005-488X.2011.01.014LI D J, YU P, QI X D. The design of spaceborne calibration intergrating sphere system[J]. Optoelectronic Technology, 2011, 31(1): 57-62. (in Chinese) doi: 10.3969/j.issn.1005-488X.2011.01.014 [11] 吴世霞. 大口径平面检测的子孔径拼接算法研究[D]. 西安: 西安工业大学, 2013.WU SH X. Research on the sub-aperture stitching algorithm for large optical flat testing[D]. Xi'an: Xi'an Technological University, 2013. (in Chinese) [12] 闫力松. 子孔径拼接干涉检测光学镜面算法的研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2015.YAN L S. Research on the algorithm testing optical mirror by subaperture stitching interferometry[D]. Changchun: Changchun Institute of Optics, Fine Mehcanics and Physics, Chinese Academy of Sciences, 2015. (in Chinese) [13] COUGHLIN M, ABBOTT T M C, BRANNON K, et al.. A collimated beam projector for precise telescope calibration[C]. Proceeding of SPIE, Observatory Operations: Strategies, Processes and Systems VI, 2018. [14] 叶钊, 任建伟, 李宪圣, 等. 用于星上定标光源的LED筛选装置[J]. 光学 精密工程,2012,20(1):64-71. doi: 10.3788/OPE.20122001.0064YE ZH, REN J W, LI X SH, et al. Screening device for LED as spaceborne calibration light source[J]. Optics and Precision Engineering, 2012, 20(1): 64-71. (in Chinese) doi: 10.3788/OPE.20122001.0064 [15] 岳智革, 刘福, 赵贵军, 等. 内置LED定标光源的积分球设计[J]. 光学与光电技术,2014,12(4):52-55.YUE ZH G, LIU F, ZHAO G J, et al. Integrating sphere design built-in LED calibration light source[J]. Optics & Optoelectronic Technology, 2014, 12(4): 52-55. (in Chinese) [16] 李东景, 于平, 王小朋. 星上定标积分球标准光源—稳流源驱动器的研制[J]. 光学 精密工程,2010,18(1):212-219.LI D J, YU P, WANG X P. Development of current stabilized source of standard lamp for spaceborne calibration integrating sphere[J]. Optics and Precision Engineering, 2010, 18(1): 212-219. (in Chinese) [17] 任建伟, 麦镇强, 万志, 等. 星上LED定标光源的可行性研究[J]. 光学 精密工程,2008,16(3):398-405.REN J W, MAI ZH Q, WAN ZH, et al. Feasibility of LED light source in spaceborne calibration[J]. Optics and Precision Engineering, 2008, 16(3): 398-405. (in Chinese) [18] 赫英威, 李平, 吴厚平, 等. 积分球辐射光源照度均匀性研究[J]. 应用光学,2012,33(3):548-553.HE Y W, LI P, WU H P, et al. Output irradiance uniformity of integrating sphere source[J]. Journal of Applied Optics, 2012, 33(3): 548-553. (in Chinese) [19] 叶钊, 任建伟, 李葆勇, 等. 大口径积分球辐射定标光源辐射性能研究[J]. 宇航计测技术,2012,32(3):39-44. doi: 10.3969/j.issn.1000-7202.2012.03.010YE ZH, REN J W, LI B Y, et al. The radiation testing research of radiometric calibration source of the large aperture integrating sphere[J]. Journal of Astronautic Metrology and Measurement, 2012, 32(3): 39-44. (in Chinese) doi: 10.3969/j.issn.1000-7202.2012.03.010 [20] 郭悦, 刘晓鹏, 杨桦. 空间CCD相机的定标方法研究[J]. 光学技术,2007,33(S1):237-238.GUO Y, LIU X P, YANG H. Analysis of calibration for space CCD camera[J]. Optical Technique, 2007, 33(S1): 237-238. (in Chinese) [21] 吴国栋, 张晓辉, 韩昌元, 等. 空间CCD相机辐射标定方法的应用研究[J]. 测试技术学报,2004,18(4):325-329. doi: 10.3969/j.issn.1671-7449.2004.04.010WU G D, ZHANG X H, HAN CH Y, et al. Radiometric calibration of the space CCD camera[J]. Journal of Test and Measurement Technology, 2004, 18(4): 325-329. (in Chinese) doi: 10.3969/j.issn.1671-7449.2004.04.010 [22] 刘则洵, 全先荣, 任建伟, 等. CCD相机输出非均匀性线性校正系数的定标[J]. 红外与激光工程,2012,41(8):2211-2215. doi: 10.3969/j.issn.1007-2276.2012.08.046LIU Z X, QUAN X R, REN J W, et al. Calibration of CCD camera's output non-uniformity linear corrected coefficient[J]. Infrared and Laser Engineering, 2012, 41(8): 2211-2215. (in Chinese) doi: 10.3969/j.issn.1007-2276.2012.08.046 [23] 王文华, 何斌, 韩双丽, 等. 星上CCD成像非均匀性的实时校正[J]. 光学 精密工程,2010,18(6):1420-1428.WANG W H, HE B, HAN SH L, et al. Real-time correction of nonuniformity in CCD imaging for remote sensing[J]. Optics and Precision Engineering, 2010, 18(6): 1420-1428. (in Chinese) -

 下载:
下载:









计量
- 文章访问数: 2114
- HTML全文浏览量: 732
- PDF下载量: 116
- 被引次数: 0
