


-
摘要:
为了提升无人机机载光电吊舱在特殊工况条件下的自主侦察能力,本文结合实际工程项目研发了适用于机载光电吊舱的目标定位技术,并在嵌入式GPU(Graphics Processing Unit,型号为Jetson-TX2i)上实现了功能验证。首先,提出一种改进的SURF(Speeded Up Robust Features)算法与GPU加速数字图像处理方案,对不同焦距下获取的两幅图像进行实时特征检测与匹配。接着,利用几何交比不变性校正图像边缘畸变特征点的位置信息。最后,使用最小二乘法估计目标深度信息并结合四元数空间模型确定目标姿态信息,从而实现目标定位。实验结果表明,改进的SURF算法在特征匹配方面,精度和速度都优于经典的SURF算法。若角点特征位置误差控制在一个像素以内,深度误差不超过2%,方位角、俯仰角和滚转角的角度误差分别小于4°,5°和2°,这一误差满足机载光电吊舱的目标定位准确性需求。此外,处理一组(两帧)分辨率为1080P的图像,利用GPU加速可以将处理时间提升至74 ms,这一速度满足机载光电吊舱数据处理的实时性需求。
Abstract:In order to improve the autonomous detection ability of the airborne optronics pod of a UAV under special working conditions, this paper developed a targeting technology suitable for the airborne optronics pod in an actual engineering project, and realized the functional verification on the embedded GPU (Graphics Processing Unit, Jetson-TX2i platform model). Firstly, we proposed an improved SURF (Speeded Up Robust Features) algorithm and GPU-accelerated digital image processing scheme to detect and match the real-time features of two images acquired at different focal lengths. Secondly, geometric cross-ratio invariance was used to correct the position information of distorted feature points at image edges. Finally, we used the least square method to estimate the depth information of the target and combines the quaternion space model to determine the attitude information of the target to determine its position. Experimental results show that the improved SURF algorithm is superior to the classical SURF algorithm in feature matching accuracy and speed. If the corner characteristic position error is controlled within one pixel, the depth error is no more than 2% and the angle errors of azimuth, pitch and roll angles are less than 4°, 5° and 2°, respectively. This error meets the target positioning accuracy requirements of the airborne optronics pod. In addition, when processing a set of images (two frames) at 1080 P resolution, the processing time can be increased to 74 ms through GPU acceleration, which meets the real-time demand for data processing in the airborne optronics pod.
-
Key words:
- feature extraction /
- feature matching /
- targeting technology /
- attitude
-
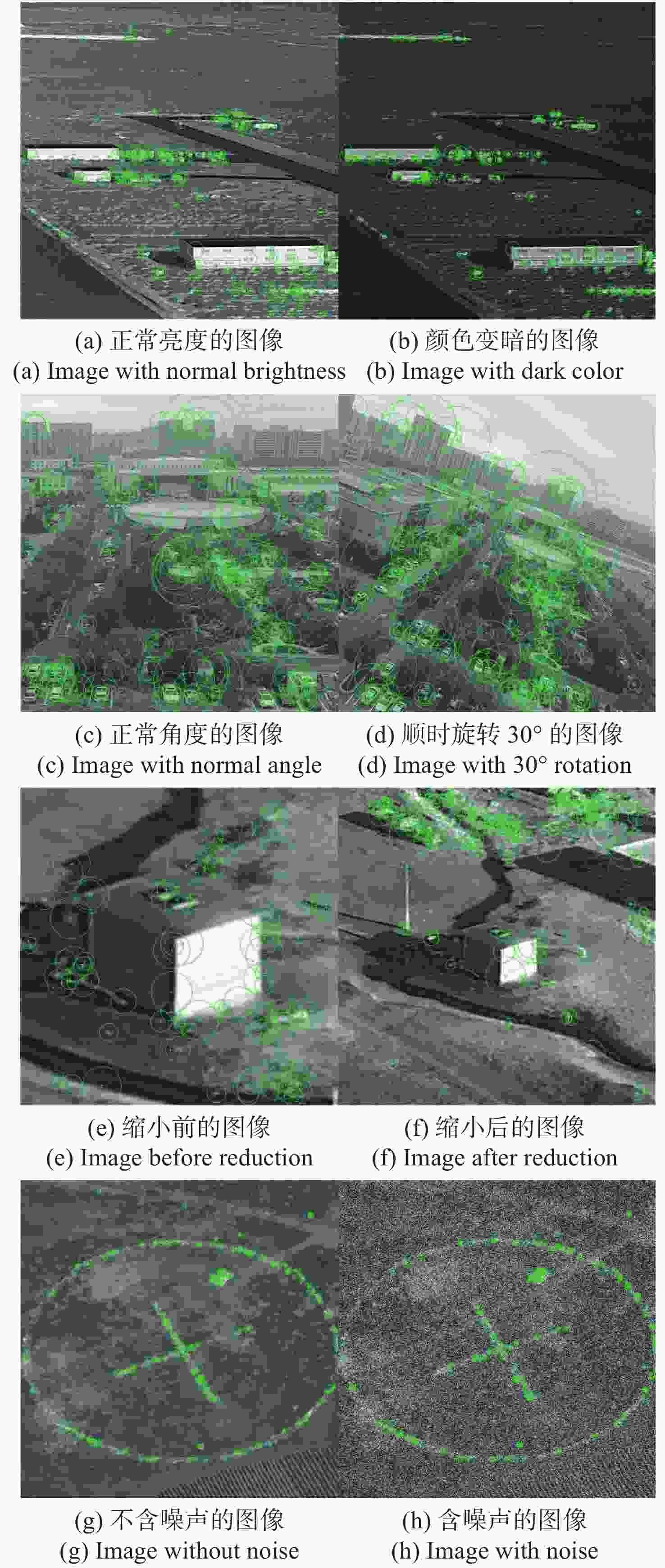
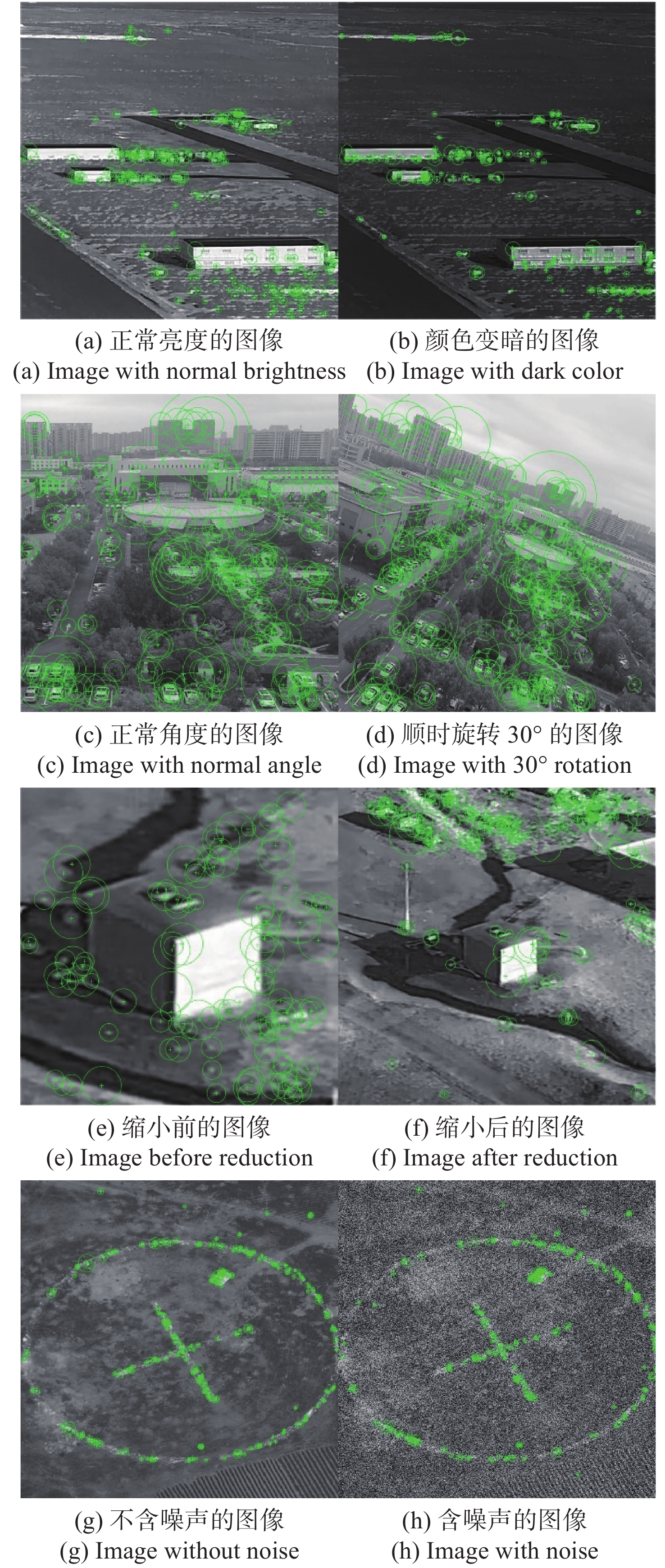
图 8 本文算法在不同条件下的特征提取结果
Figure 8. Feature extraction results obtained by the proposed algorithm under different conditions

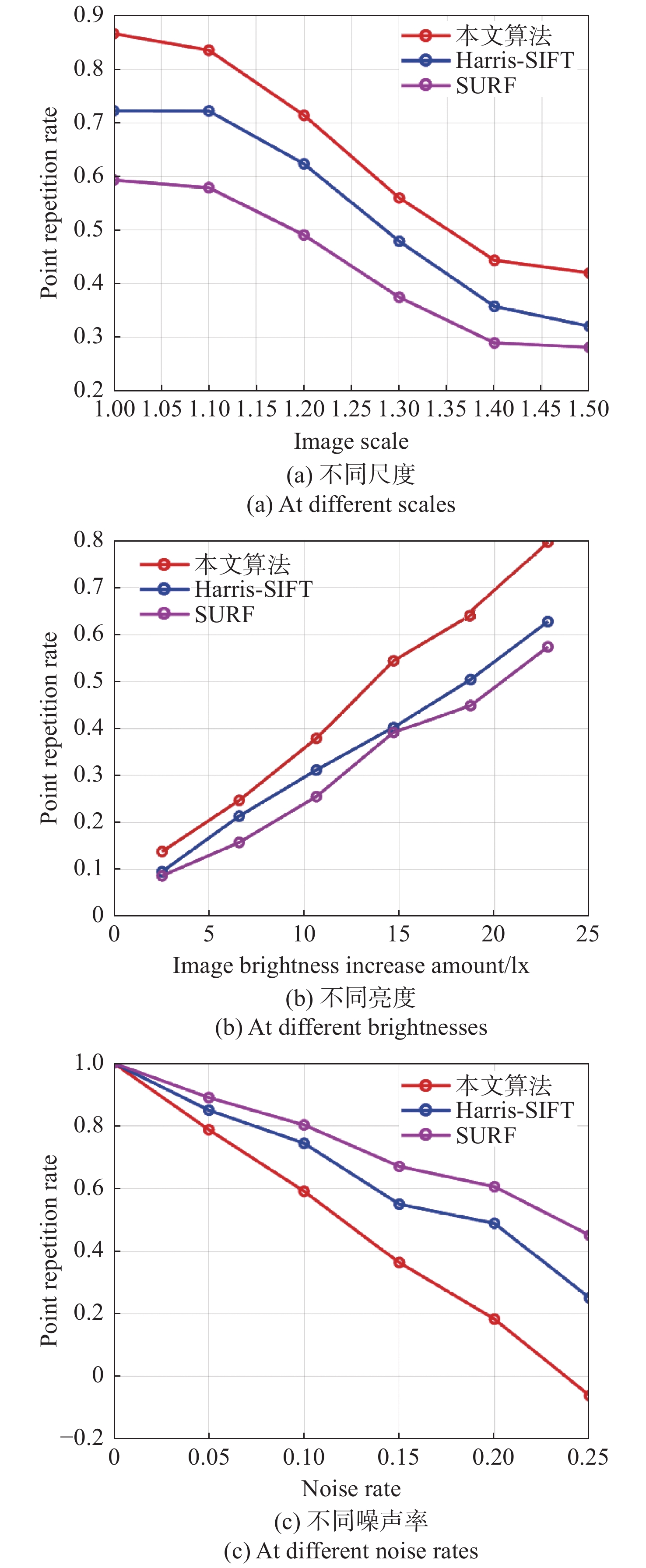
图 9 3种算法在不同条件下的角点检测重复率
Figure 9. Corner detection repetition rates obtained by three algorithms under different conditions
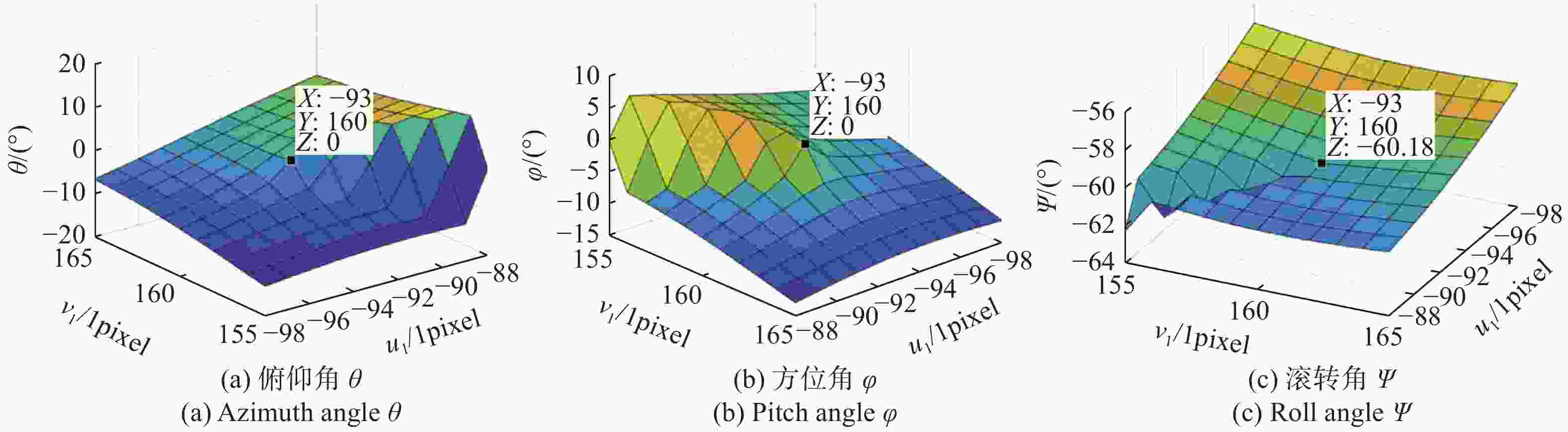
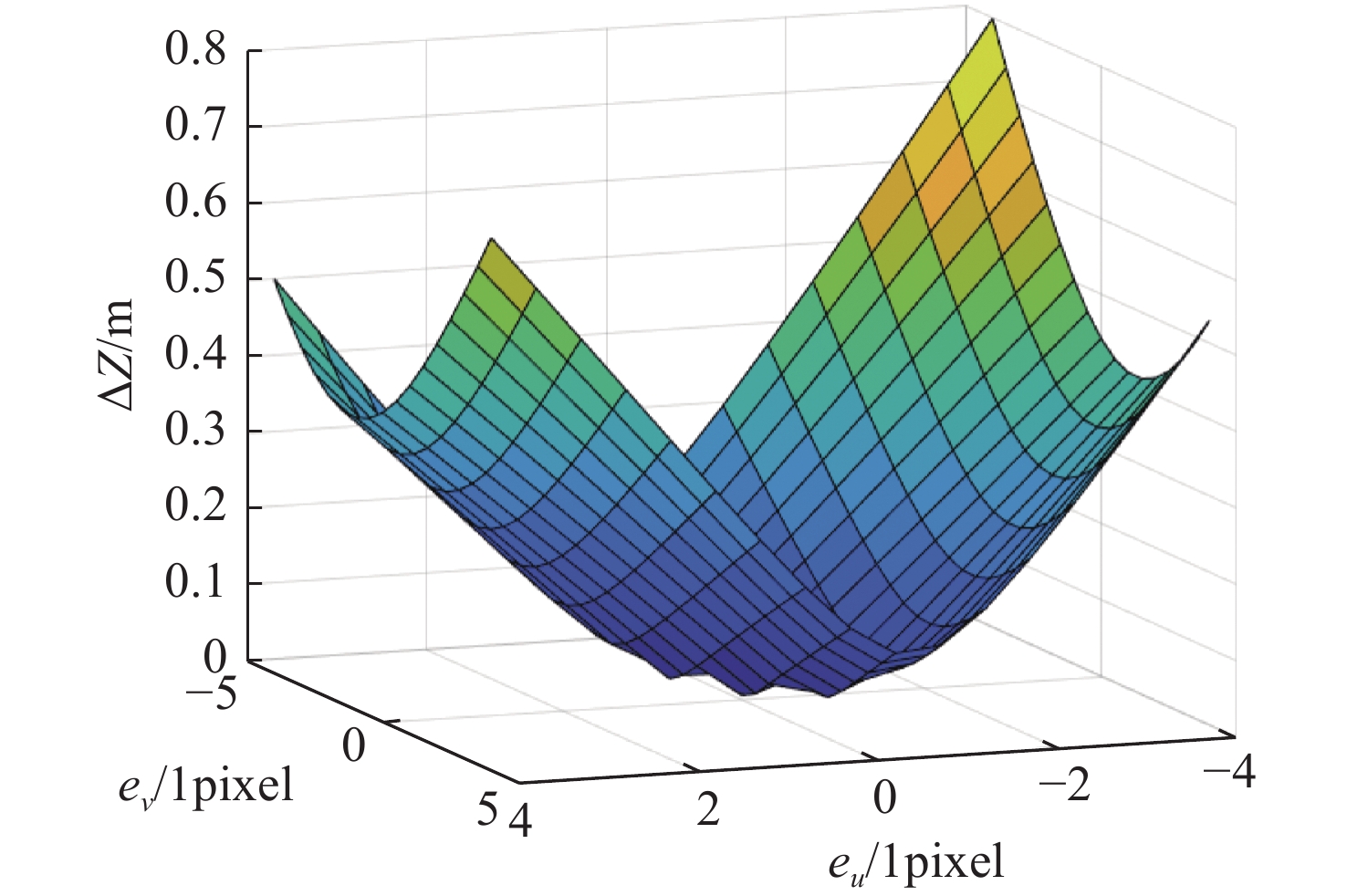
图 12 特征点定位精度与解算姿态角的关系
Figure 12. The relation between position accuracy of feature point and calculated attitude angle
表 1 3种算法的正确匹配率和处理速度
Table 1. Correct matching rates and processing speeds of the three algorithms (Unit: ms)
图像 本文算法 SURF Harris-SIFT ${r_{\rm{c}}}$ $ t $ ${r_{\rm{c}}}$ $ t $ ${r_{\rm{c}}}$ $ t $ 1 6.17 7.17 3.01 11.83 6.17 10.60 2 74.85 9.28 76.89 30.26 51.33 39.25 3 50.15 8.87 51.50 20.27 34.39 26.30 4 28.44 7.82 29.21 11.49 19.51 14.92 5 62.13 9.01 63.82 25.67 46.26 35.27 6 39.67 8.32 40.75 13.67 27.94 20.82  下载: 导出CSV
下载: 导出CSV
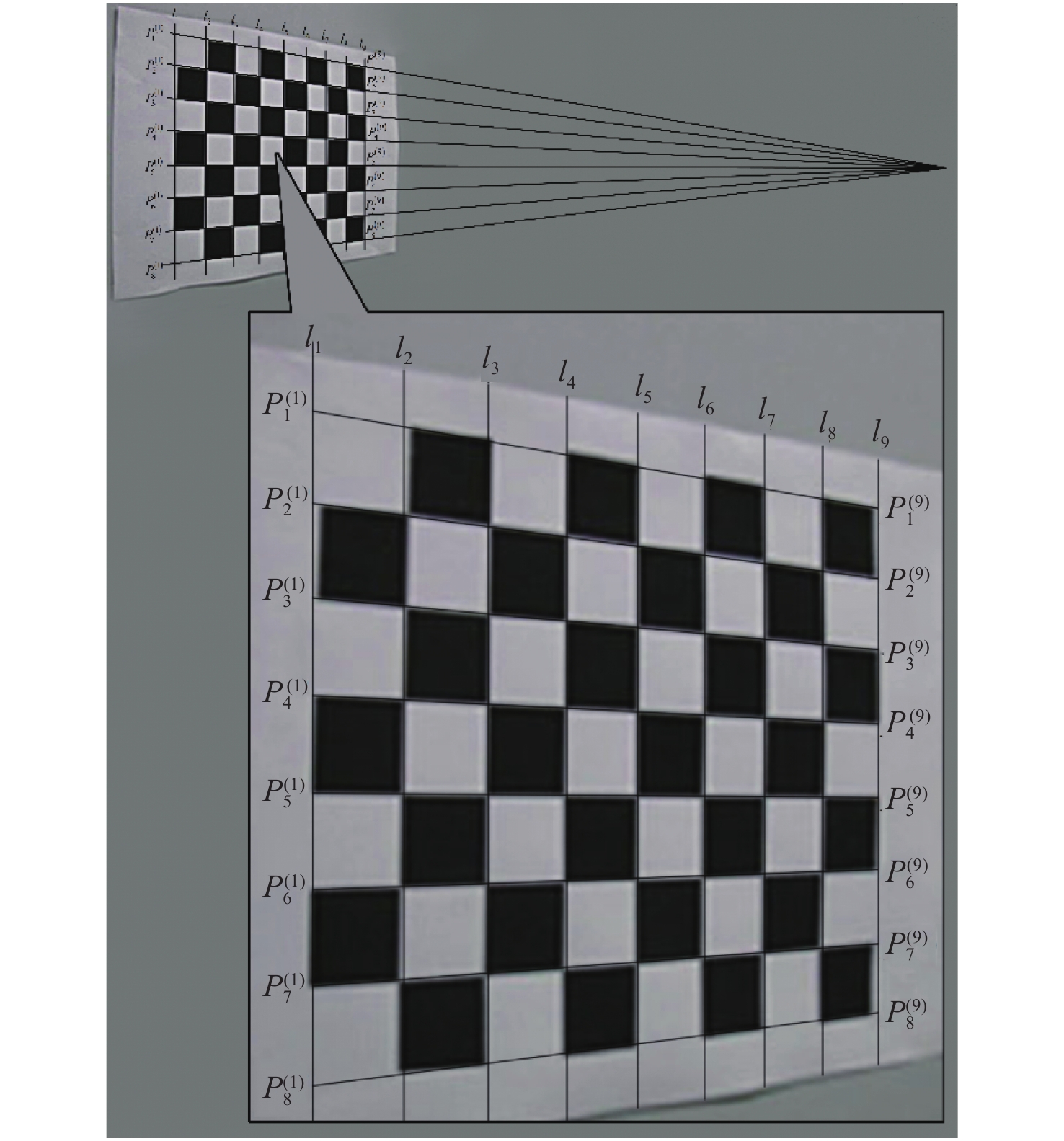
表 2 两种相机标定算法的结果对比
Table 2. Comparison of the results obtained by two camera calibration algorithms
参数 本文 张方法 使用图像 $ {{\boldsymbol{I}}_1} $ $ {{\boldsymbol{I}}_{25}} $ $ {{\boldsymbol{I}}_{49}} $ $ {{\boldsymbol{I}}_1},{{\boldsymbol{I}}_2}, \ldots ,{{\boldsymbol{I}}_{50}} $ $ {{{k_1}}/ { \times {{10}^{ - 3}}}} $ 3.132 3.131 3.132 3.129 $ {{{k_2}}/ { \times {{10}^{ - 3}}}} $ 3.227 3.225 3.226 3.225 $ {{{k_3}} /{ \times {{10}^{ - 3}}}} $ 0.002 0.001 0.001 0.002 $ {p_1} $ −0.0001 −0.00009 −0.00008 −0.0001 $ {p_2} $ 0.0001 0.0001 0.0003 0.0001
下载: 导出CSV
表 3 两种方案在不同分辨率条件下的处理速度
Table 3. The processing speeds of the two algorithms at different resolutions (Unit: ms)
图像分辨率 处理时间 CPU方案 GPU方案 640×320 84 17 640×512 161 32 1024×768 304 52 1920×1080 596 74
下载: 导出CSV
-
[1] 张金隆, 吴珊, 龚业明. 中国智能机械制造评价及发展研究[J]. 中国机械工程,2020,31(4):451-458. doi: 10.3969/j.issn.1004-132X.2020.04.012ZHANG J L, WU SH, GONG Y M. Research on evaluation and development of intelligent machinery manufacturing in China[J]. China Mechanical Engineering, 2020, 31(4): 451-458. (in Chinese) doi: 10.3969/j.issn.1004-132X.2020.04.012 [2] WEI M S, XING F, YOU ZH. A real-time detection and positioning method for small and weak targets using a 1D morphology-based approach in 2D images[J]. Light:Science &Applications, 2018, 7: 18006. [3] YUAN X Y, JI M Q, WU J M, et al. A modular hierarchical array camera[J]. Light:Science &Applications, 2021, 10(1): 37. [4] PINIES P, LUPTON T, SUKKARIEH S, et al. . Inertial aiding of inverse depth SLAM using a monocular camera[C]. IEEE International Conference on Robotics & Automation, IEEE, 2007: 2797-2802. [5] 张中, 黄俊杰, 汪明明. 一种基于实时视频的位姿估计方法: 中国, 112419409A[P]. 2021-02-26.ZHANG ZH, HUANG J J, WANG M M. A pose estimation method based on real-time video: CN, 112419409A[P]. 2021-02-26. (in Chinese) [6] 丁国绅, 乔延利, 易维宁, 等. 基于光谱图像空间的改进SIFT特征提取与匹配[J]. 北京理工大学学报,2022,42(2):192-199.DING G SH, QIAO Y L, YI W N, et al. Improved SIFT feature extraction and matching based on spectral image space[J]. Transactions of Beijing Institute of Technology, 2022, 42(2): 192-199. (in Chinese) [7] LESHCHENKO V E, KESSEL A, JAHN O, et al. On-target temporal characterization of optical pulses at relativistic intensity[J]. Light:Science &Applications, 2019, 8: 96. [8] 左威健, 胡立华, 刘爱琴, 等. 基于动态拓展的特征匹配方法[J]. 计算机工程与设计,2022,43(3):778-785.ZUO W J, HU L H, LIU A Q, et al. Feature matching method based on dynamic expansion[J]. Computer Engineering and Design, 2022, 43(3): 778-785. (in Chinese) [9] ZHANG ZH Y. A flexible new technique for camera calibration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. doi: 10.1109/34.888718 [10] ZHANG Y, DU SH Q, HIRAKAWA K. Deep-nanometer-scale terahertz spectroscopy using a transistor geometry with metal nanogap electrodes[J]. Light:Advanced Manufacturing, 2021, 2(4): 460-472. [11] 王月, 李阳, 金映谷, 等. 拼接图像的径向畸变矫正技术[J]. 大连民族大学学报,2021,23(3):228-231. doi: 10.3969/j.issn.1009-315X.2021.03.009WANG Y, LI Y, JIN Y G, et al. Radial distortion correction technology of image mosaic[J]. Journal of Dalian Minzu University, 2021, 23(3): 228-231. (in Chinese) doi: 10.3969/j.issn.1009-315X.2021.03.009 [12] HAJANO S, NAZ B, TALPUR S. Area and feature based image registration using template matching and SURF algorithm[C]. INCCST'20 Second International Conference, 2021: 109-113. [13] 雒福佐. 基于小波分析与RANSAC匹配的雷达图像拼接研究[J]. 自动化与仪器仪表,2022(2):199-203,208.LUO F Z. Research on radar image mosaic based on wavelet analysis[J]. Automation &Instrumentation, 2022(2): 199-203,208. (in Chinese) [14] 杨建柏, 赵建, 孙强. 基于交比不变性的投影仪标定[J]. 中国光学,2021,14(2):320-328. doi: 10.37188/CO.2020-0111YANG J B, ZHAO J, SUN Q. Projector calibration based on cross ratio invariance[J]. Chinese Optics, 2021, 14(2): 320-328. (in Chinese) doi: 10.37188/CO.2020-0111 [15] LI Q, ZENG Y A, JIU ZH X, et al. Distortion correction of optical system based on neural network and automated generation of reference points[J]. Proceedings of SPIE, 2009, 7283: 72831R. doi: 10.1117/12.828680 [16] HARTLEY R, KANG S B. Parameter-free radial distortion correction with center of distortion estimation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(8): 1309-1321. doi: 10.1109/TPAMI.2007.1147 [17] 陈天择, 葛宝臻, 罗其俊. 重投影优化的自由双目相机位姿估计方法[J]. 中国光学,2021,14(6):1400-1409. doi: 10.37188/CO.2021-0105CHEN T Z, GE B ZH, LUO Q J. Pose estimation for free binocular cameras based on reprojection error optimization[J]. Chinese Optics, 2021, 14(6): 1400-1409. (in Chinese) doi: 10.37188/CO.2021-0105 [18] 杜明鑫, 闫钰锋, 张燃, 等. 基于透镜阵列的三维姿态角度测量[J]. 中国光学,2022,15(1):45-55.DU M X, YAN Y F, ZHANG R, et al. 3D position angle measurement based on a lens array[J]. Chinese Optics, 2022, 15(1): 45-55. (in Chinese) -

 下载:
下载:







计量
- 文章访问数: 1303
- HTML全文浏览量: 403
- PDF下载量: 279
- 被引次数: 0
