2023年 16卷 第2期

 摘要
摘要 HTML全文
HTML全文 PDF 7682KB
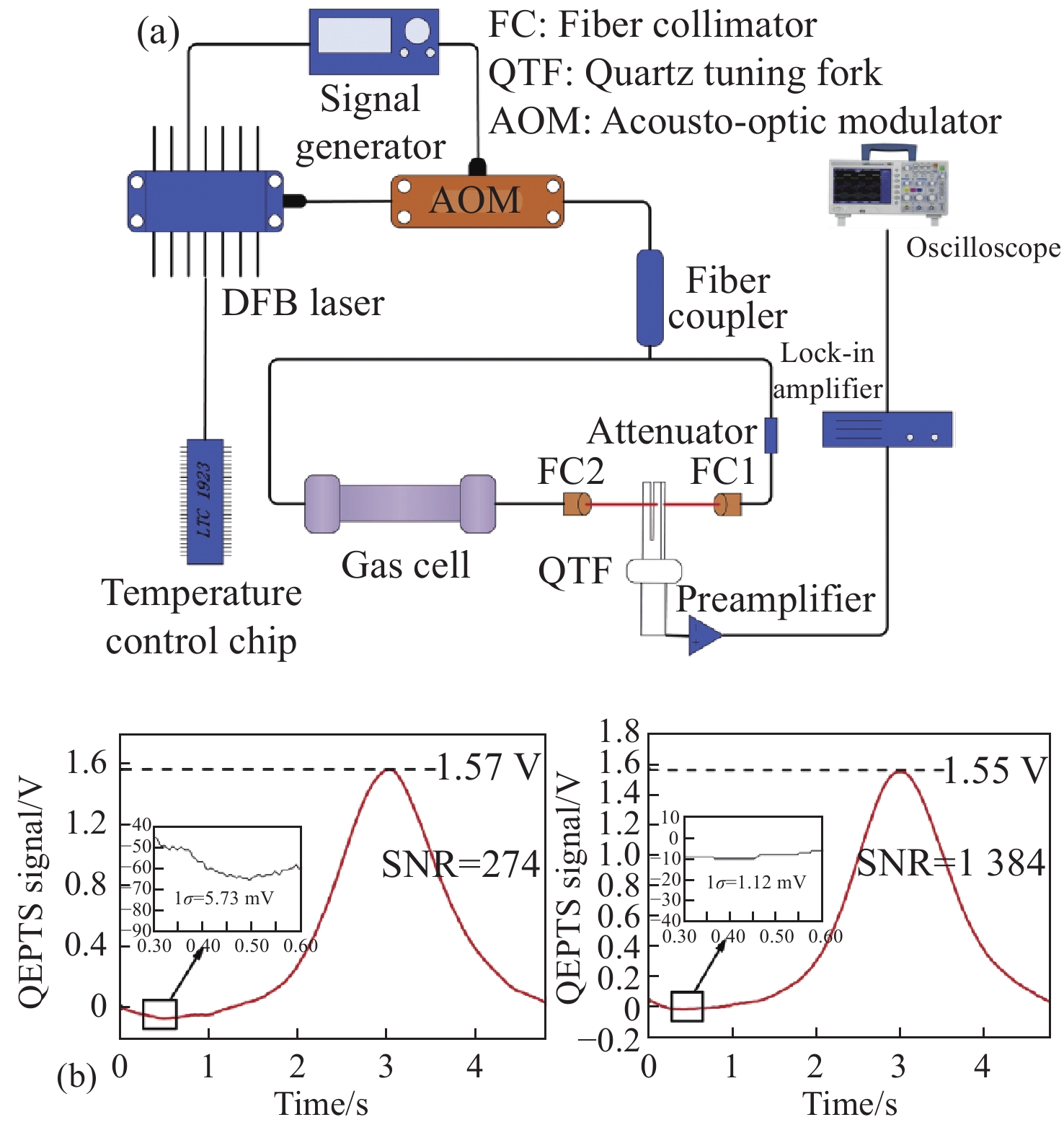
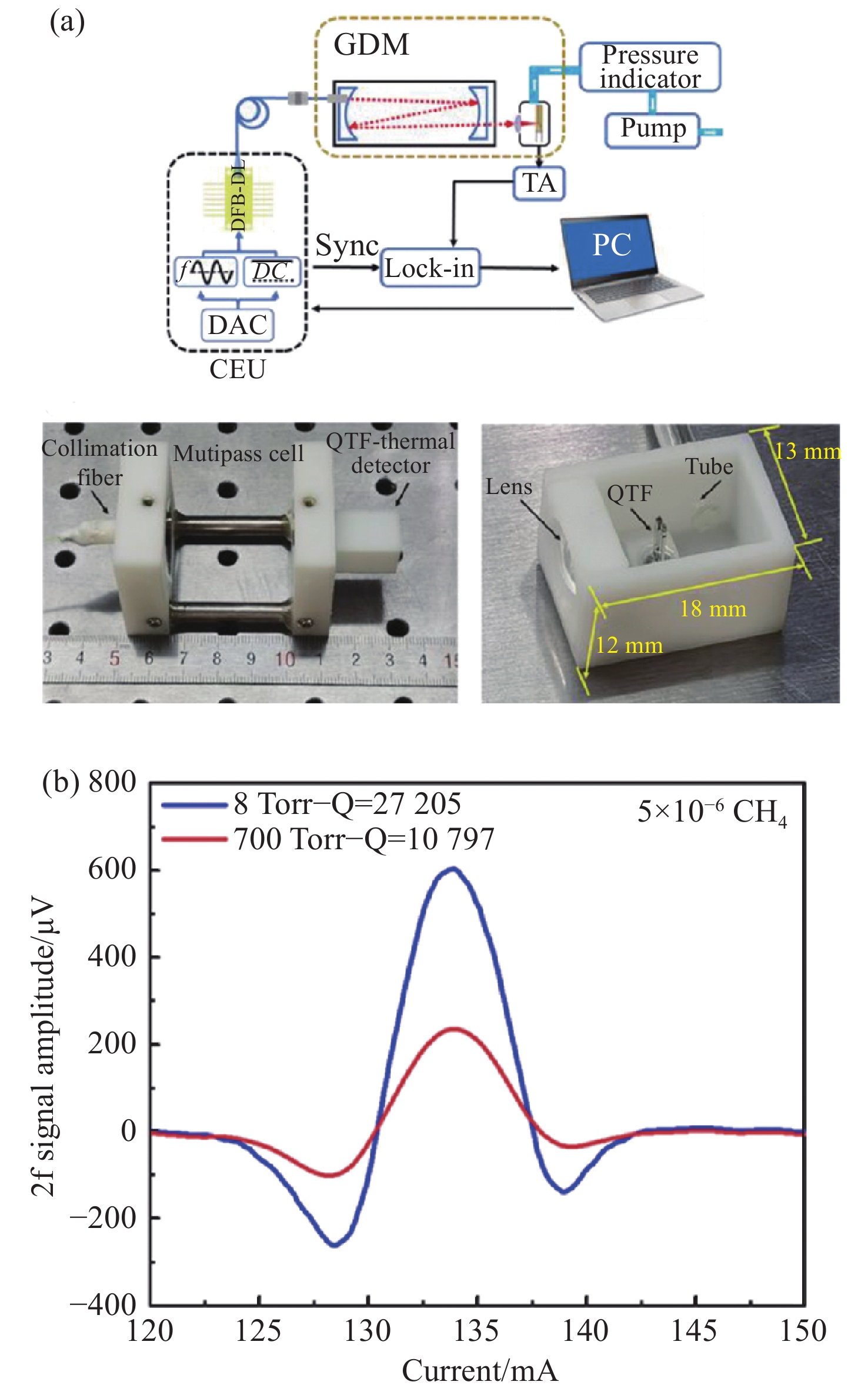
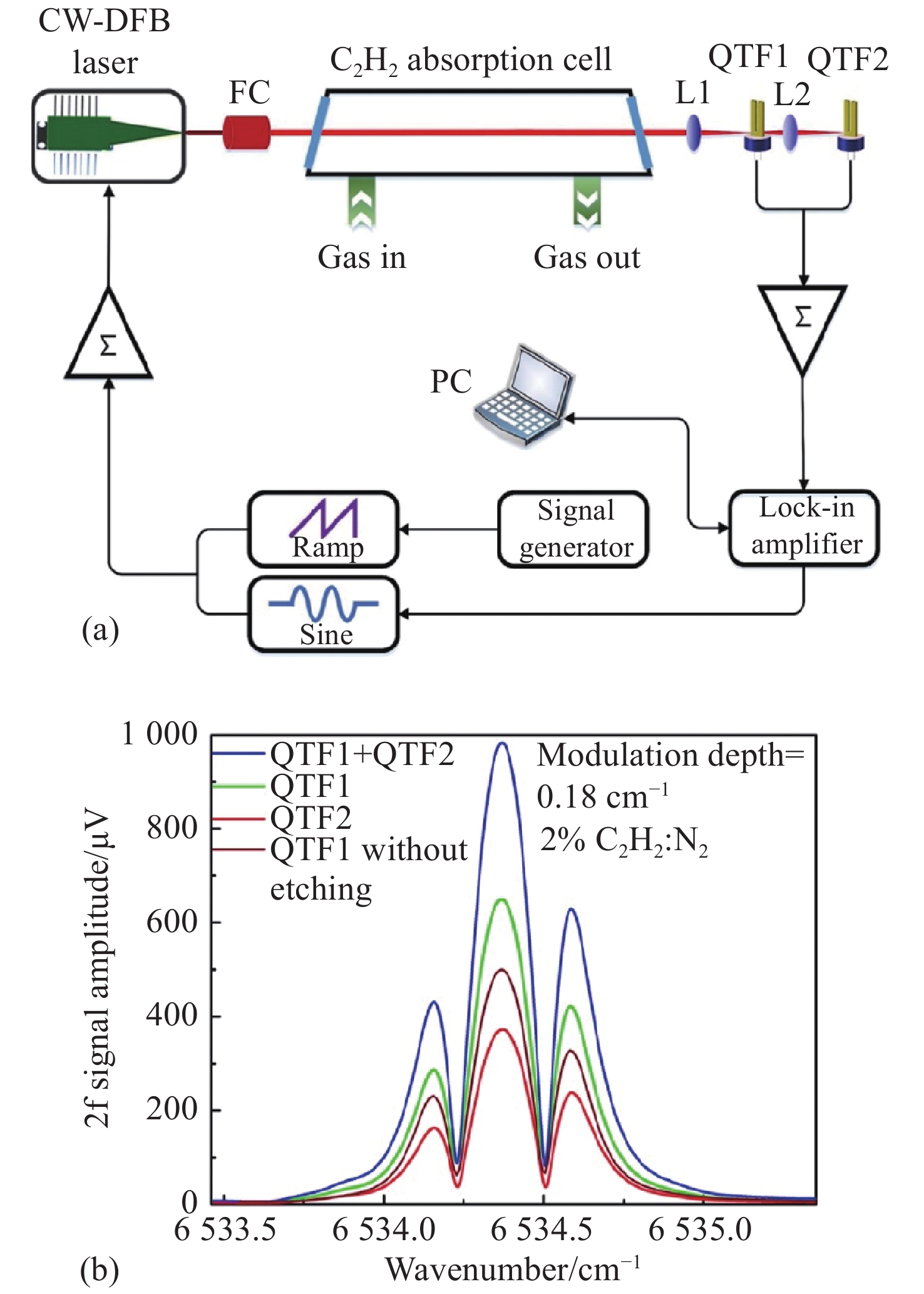
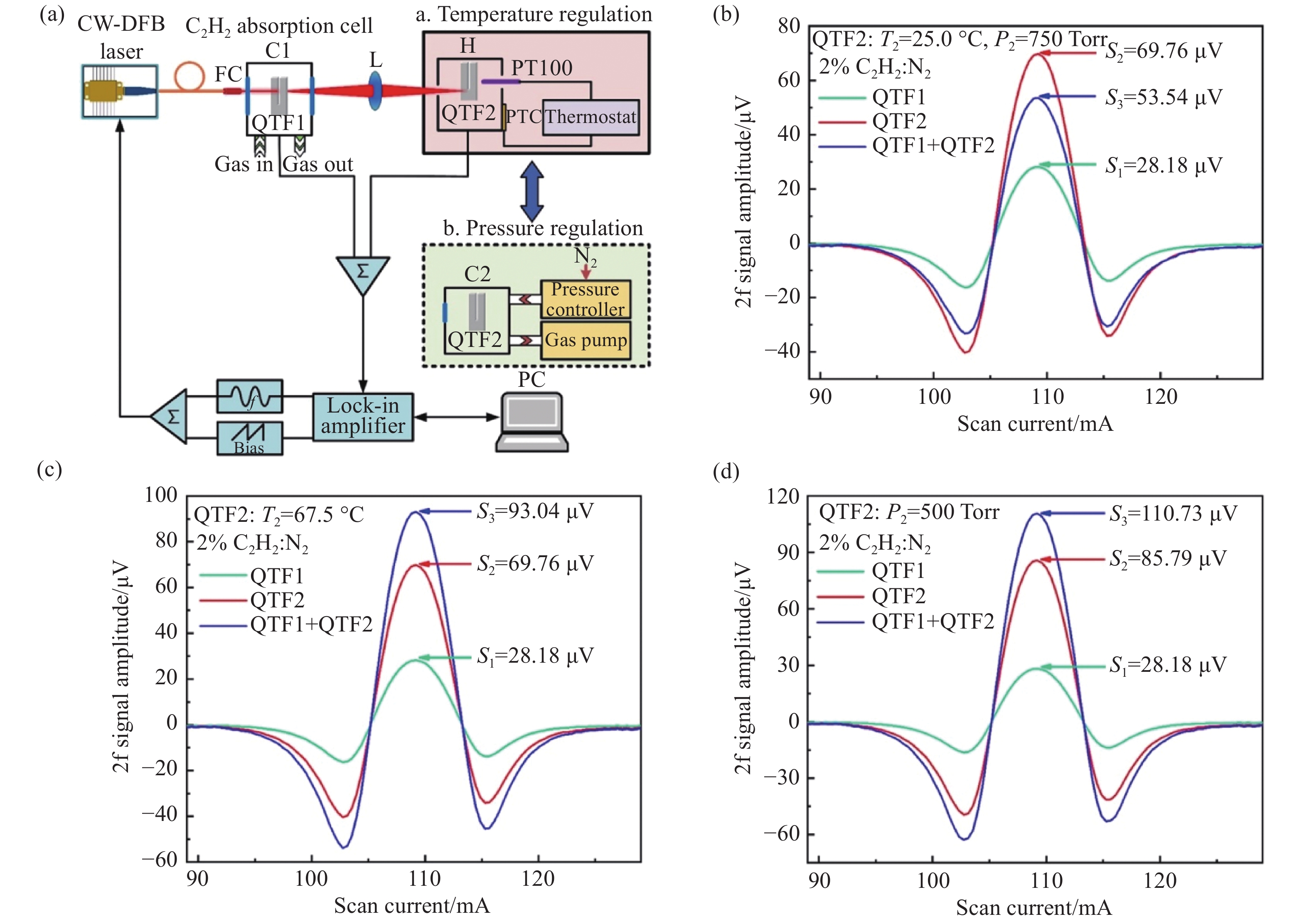
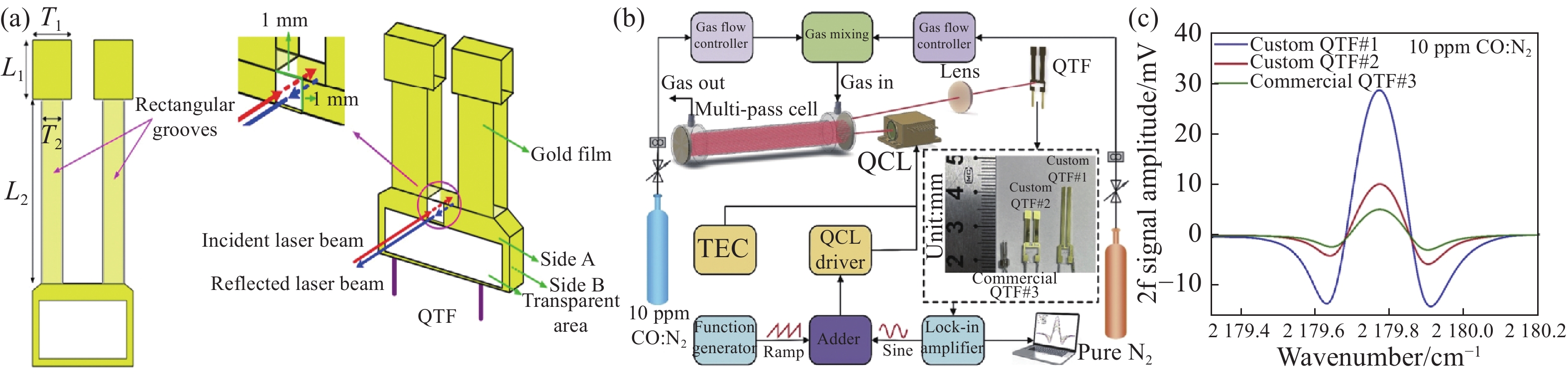
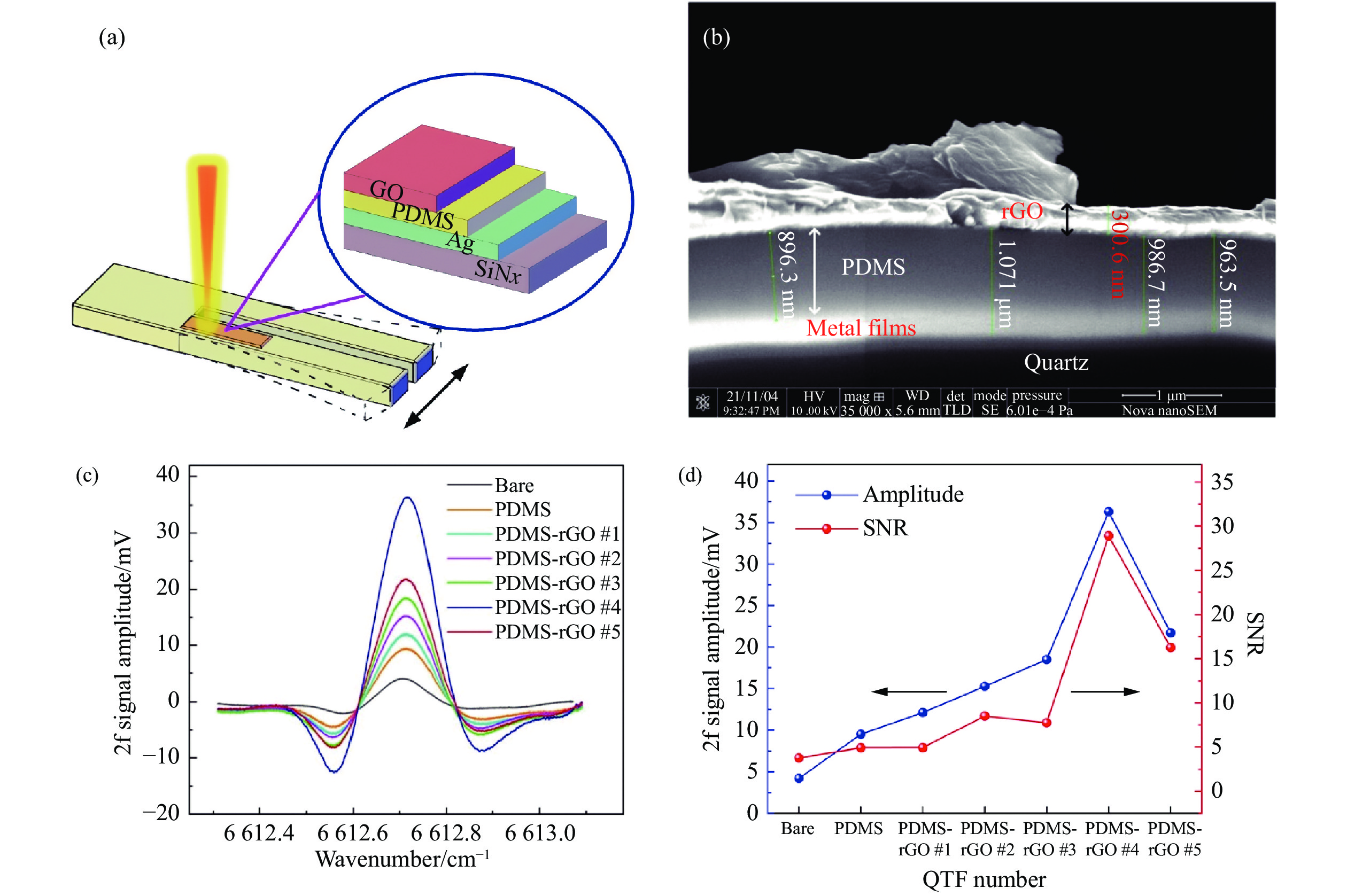
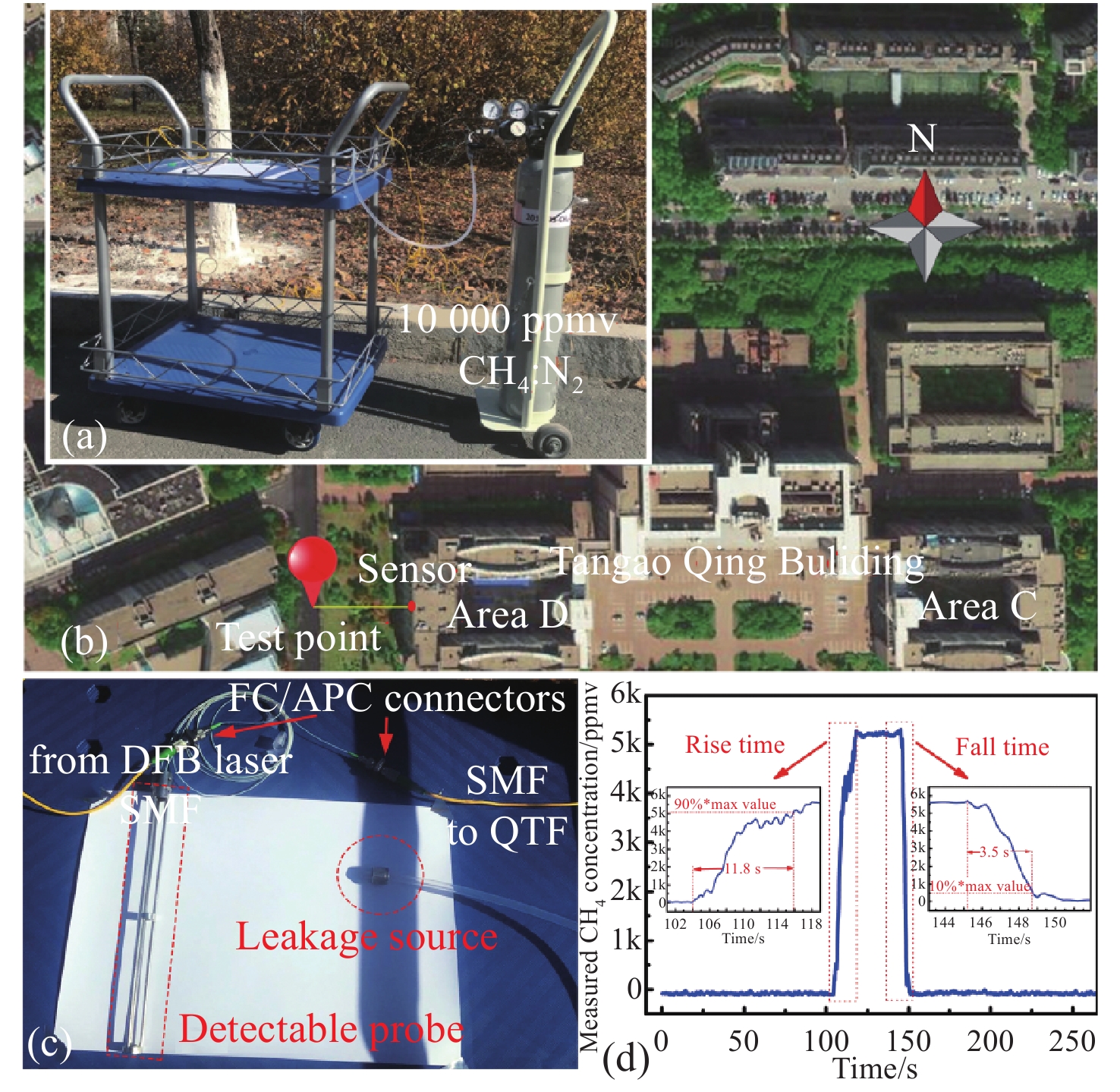
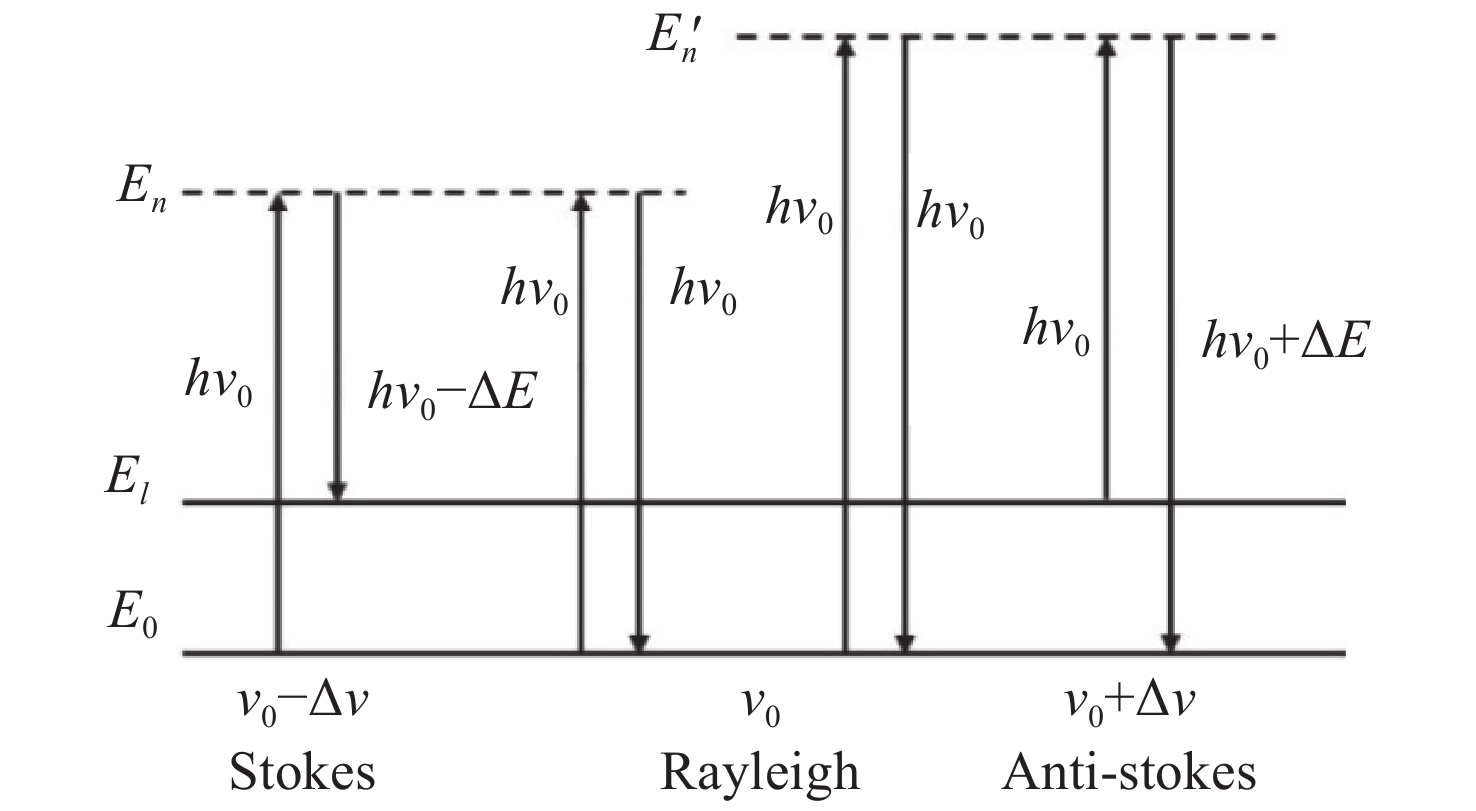
PDF 7682KB光致热弹光谱是一种基于石英音叉热弹效应的新型气体检测技术,具有成本低、体积小、灵敏度高及光谱响应范围宽等优点,是目前一种重要的痕量气体检测方法。本文首先分析了基于光致热弹光谱的气体浓度测量原理,其次,从提高检测系统灵敏度的各种技术方法角度出发,介绍了近年来开发的提高石英音叉热弹光谱系统检测灵敏度的技术方法,从信号幅值、信噪比、最小检出限和归一化噪声等效吸收系数等方面,对系统的性能改进提升效果进行评估。最后,简要评述了光致热弹光谱在现场气体检测中的应用研究进展,对进一步提高检测系统灵敏度的方法进行了总结与展望。


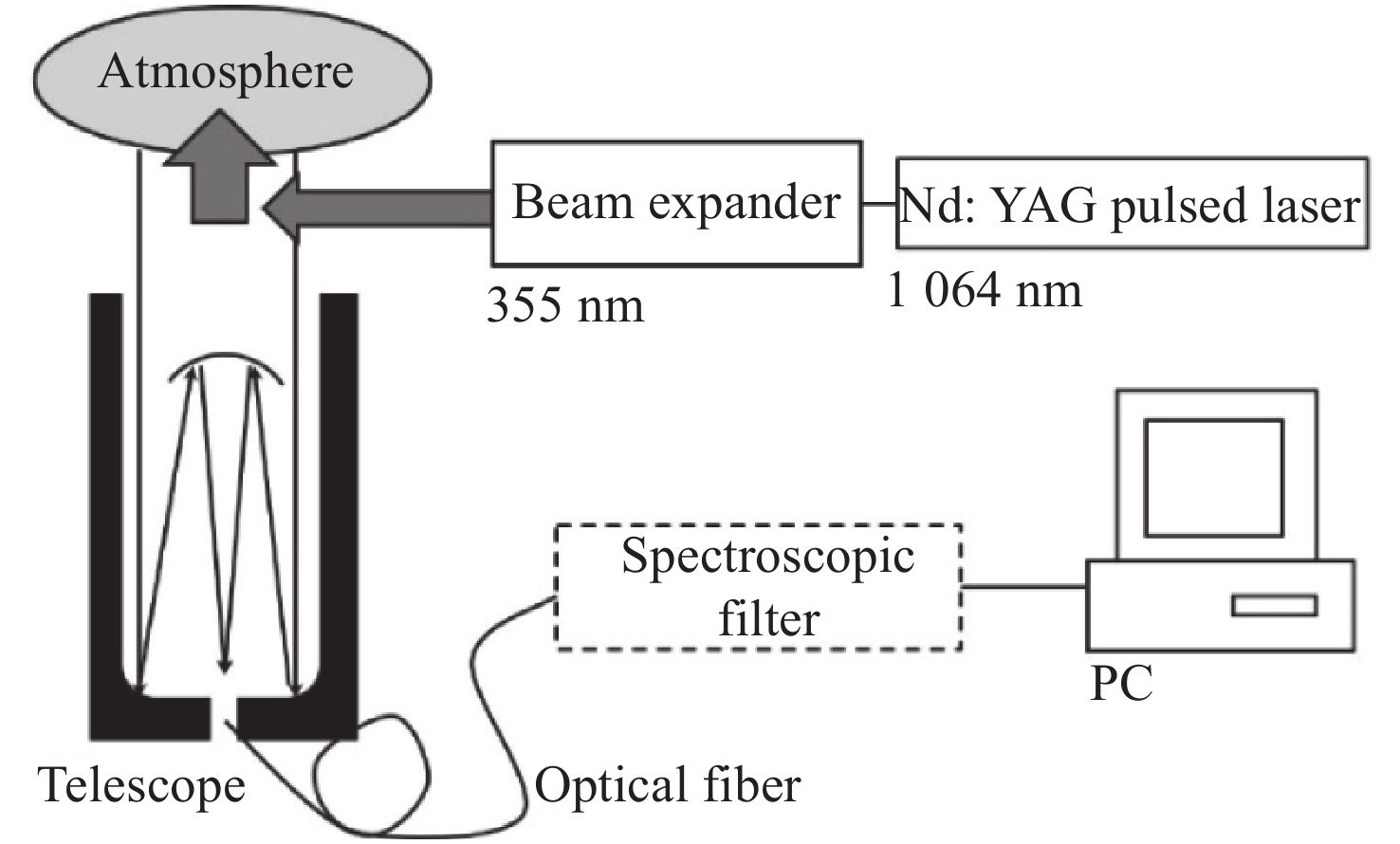
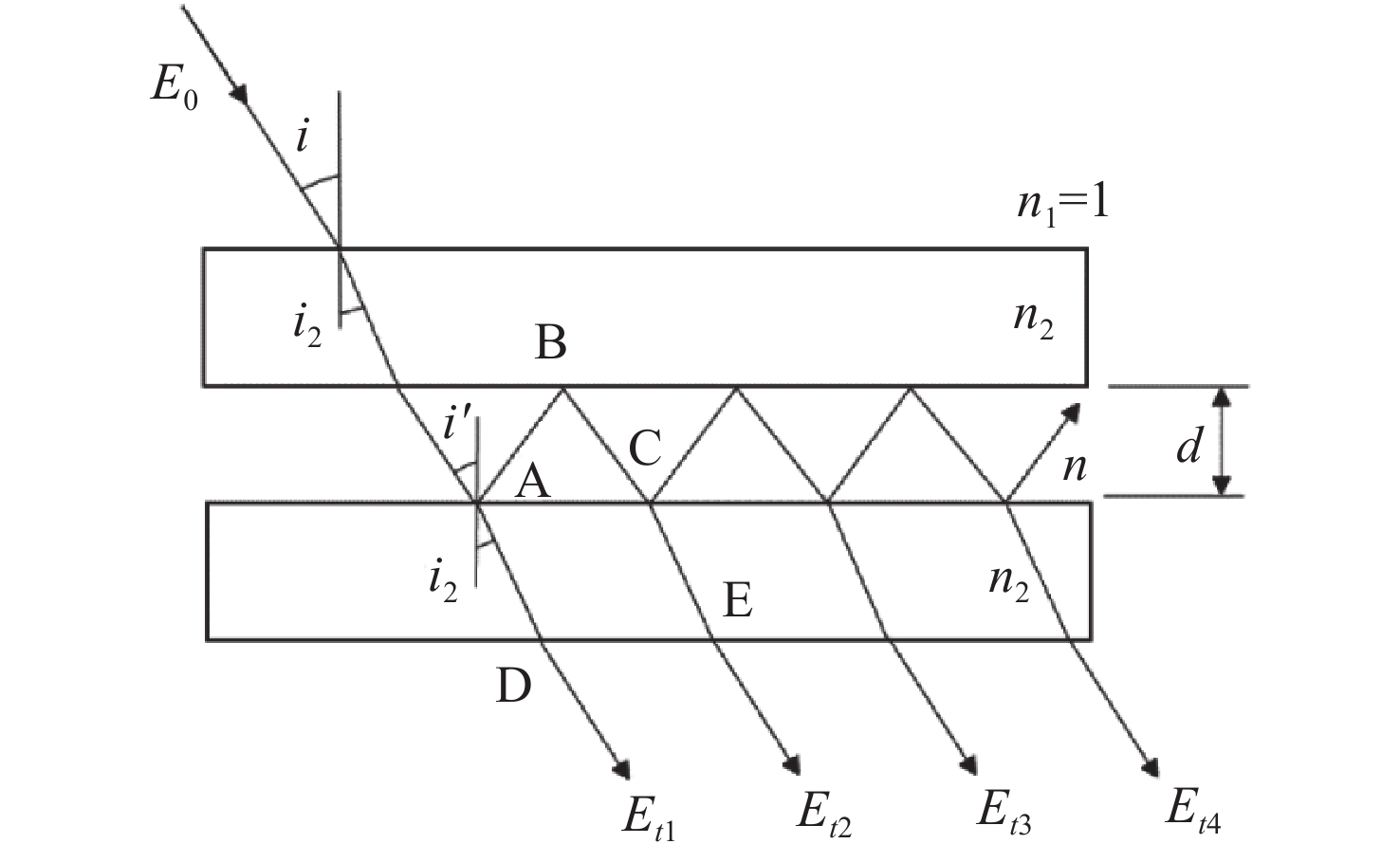
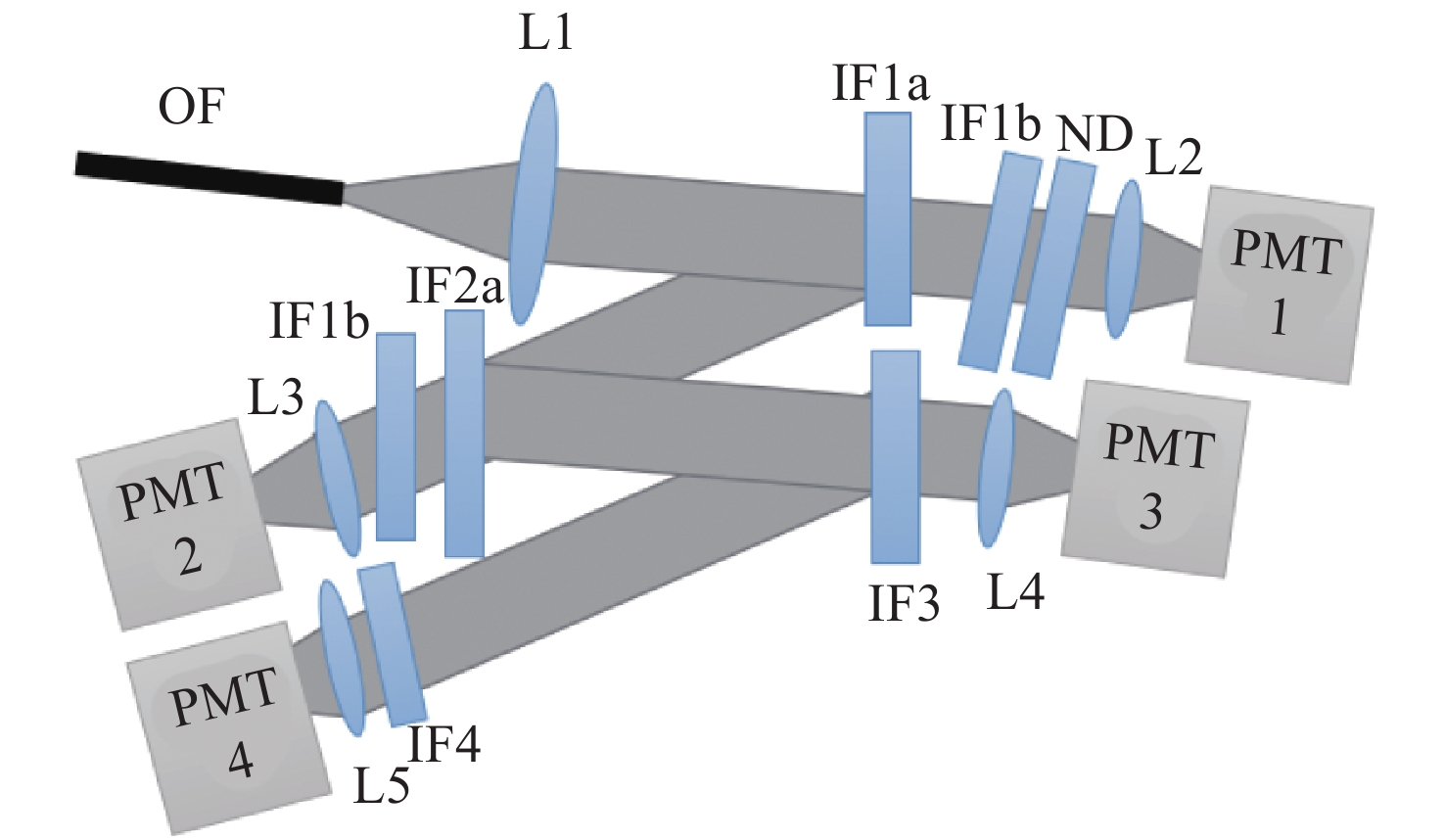
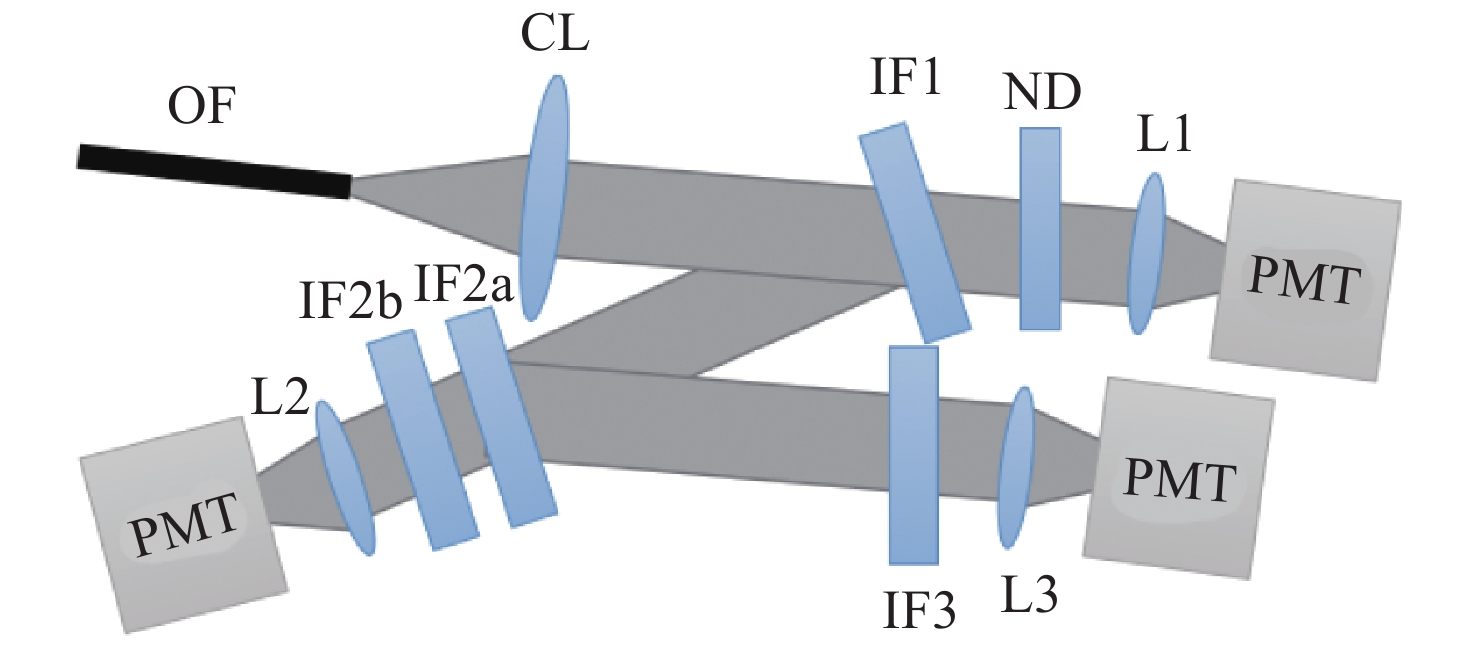
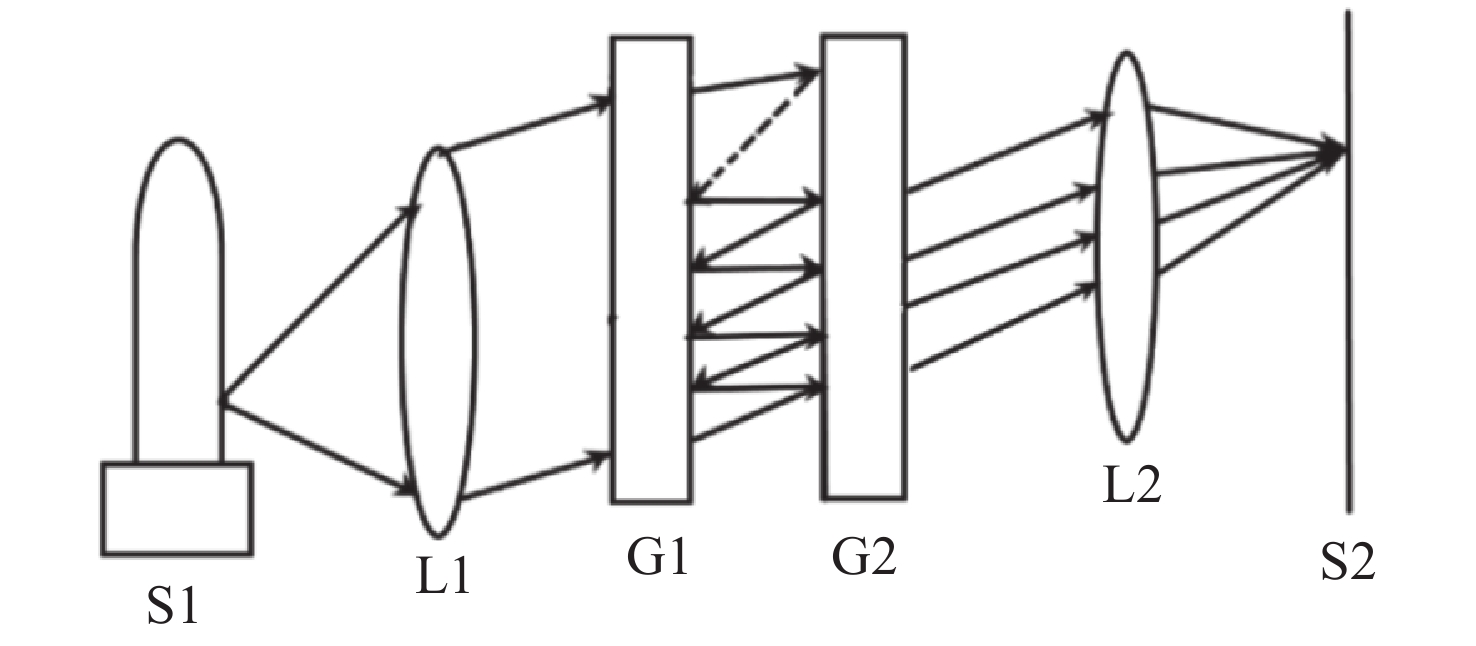
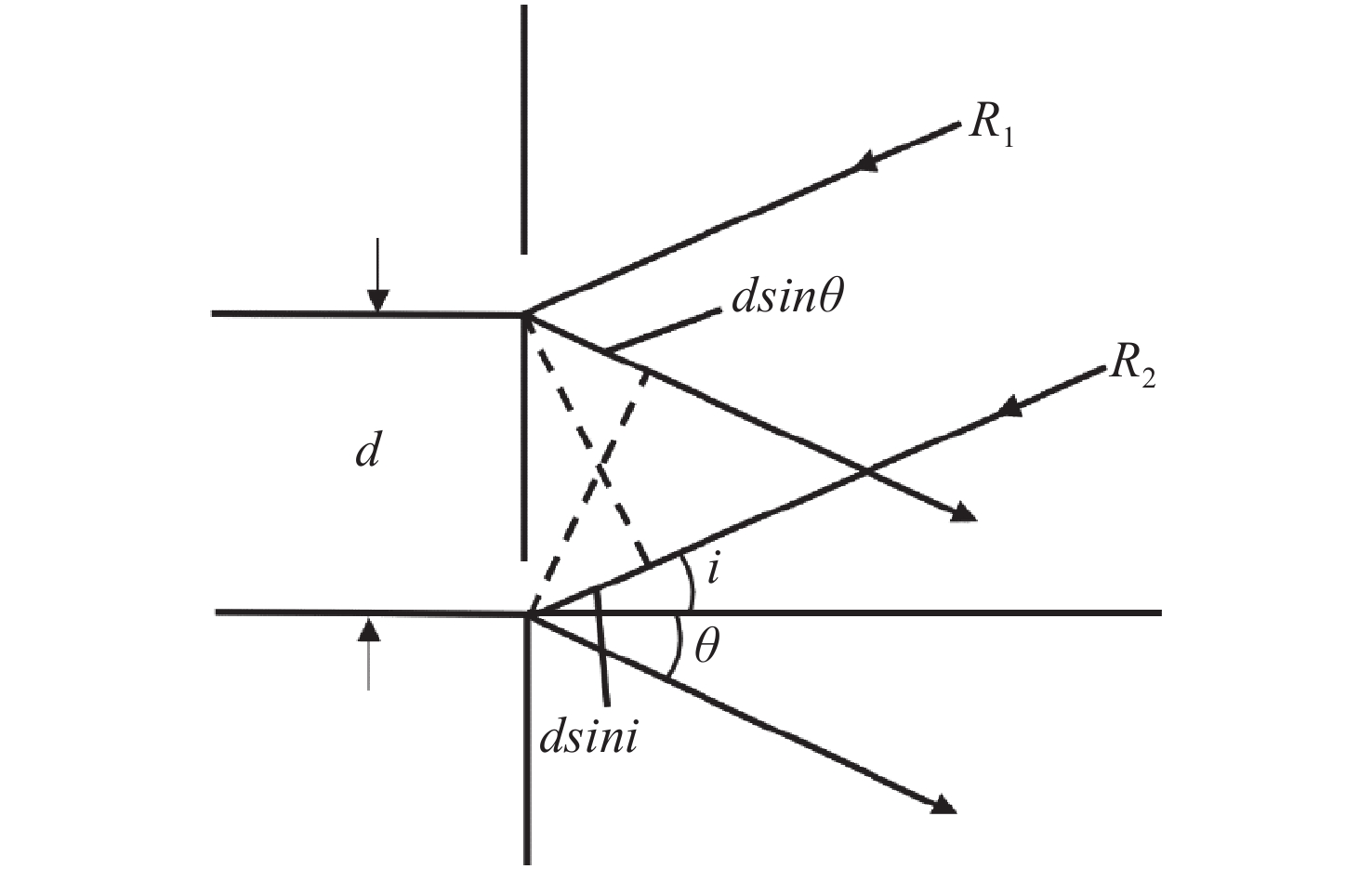
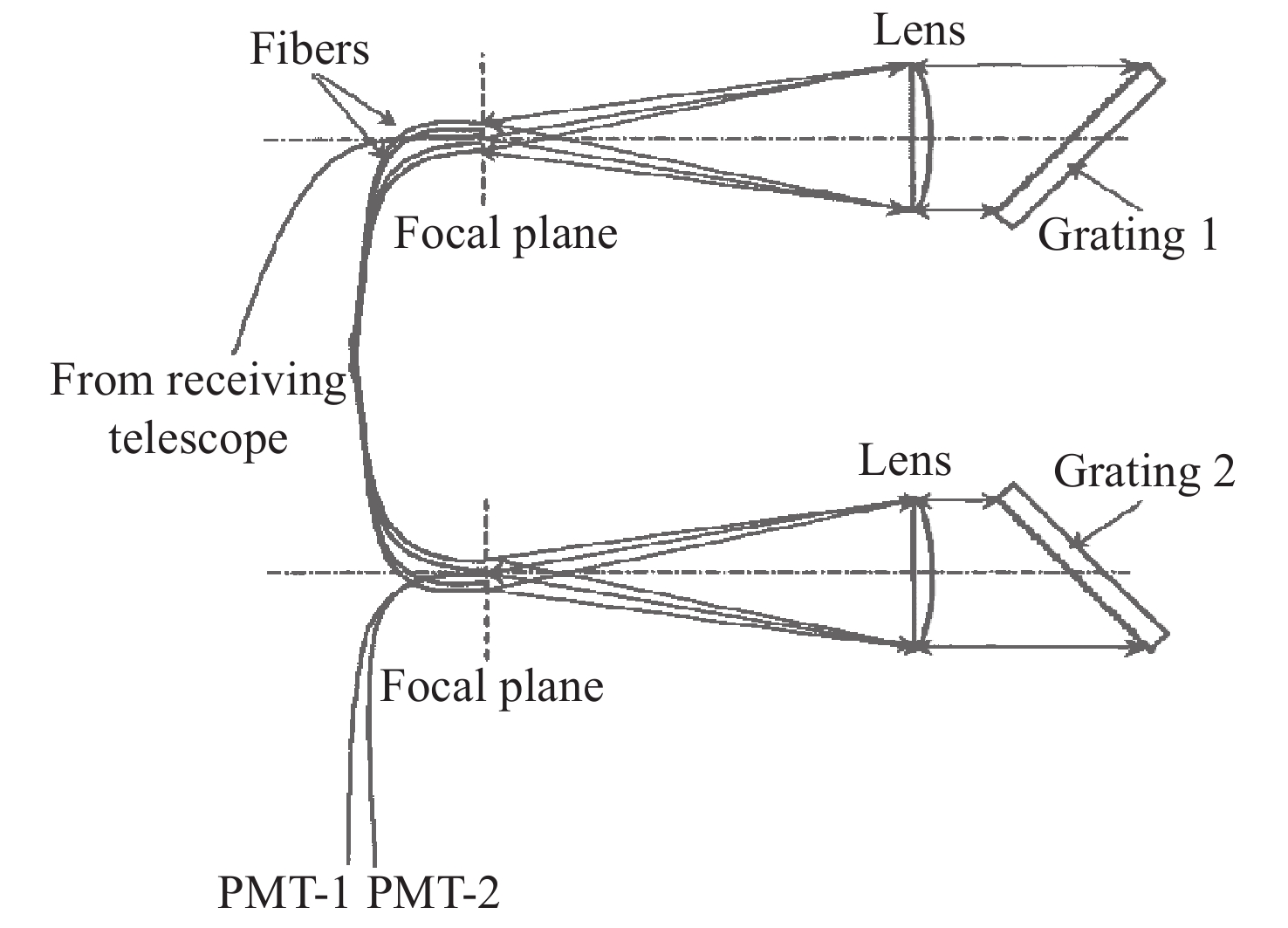
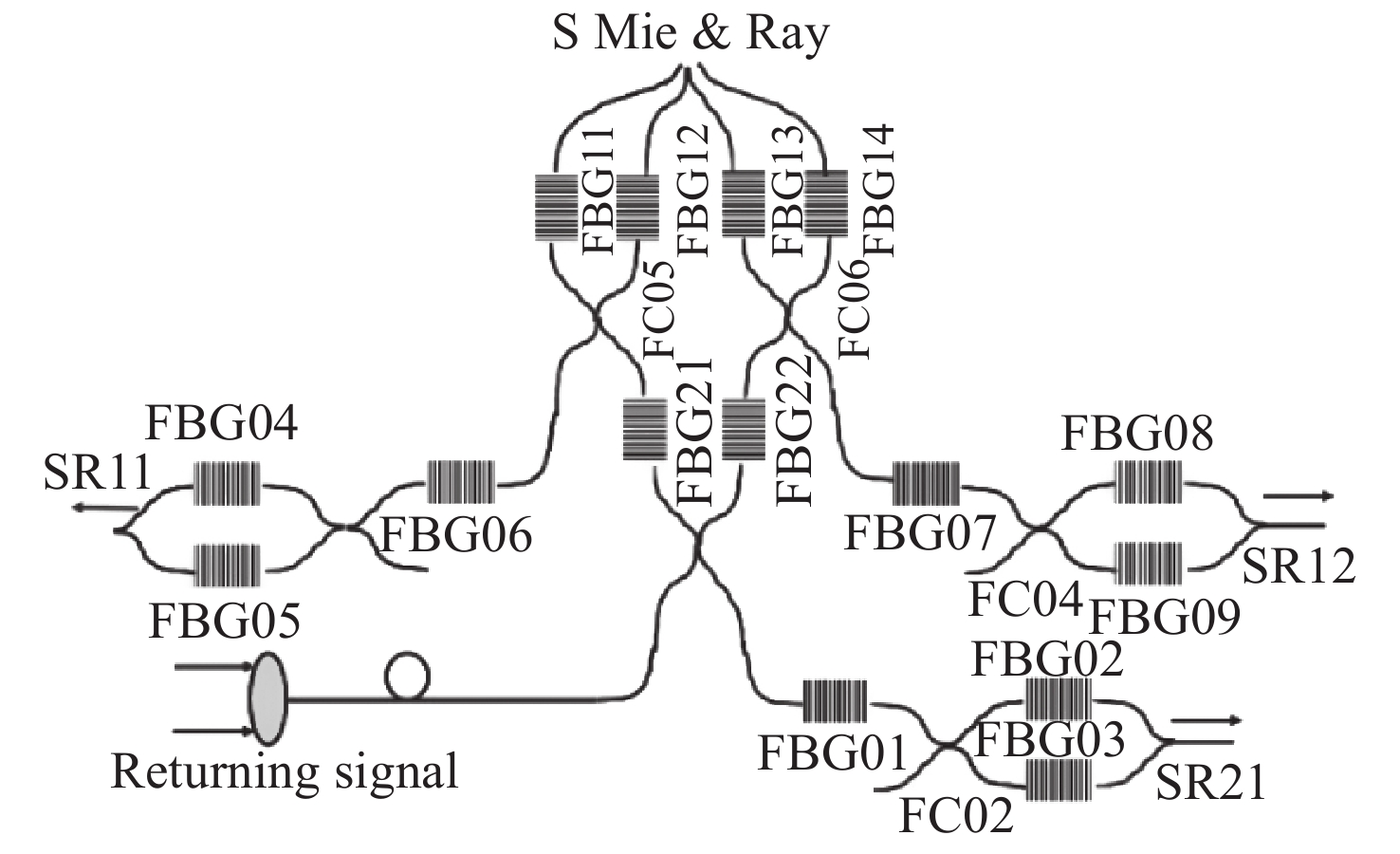
温度、湿度、压强是3个重要的大气参数。快速、准确地了解大气的温度、湿度和压强信息及其变化趋势,对天气、气候、人工影响天气等研究有重要意义。拉曼激光雷达通过分离拉曼散射信号反演得到各种大气环境相关参数,可实现对大气参数廓线信息的高精度探测,在大气温湿压探测中独具优势与潜力。本文介绍了拉曼激光雷达对大气温度、湿度和压强的探测原理与反演方法,着重介绍了拉曼激光雷达中滤光片、标准具、光栅等常用分光器件的优缺点及其进展,以及拉曼激光雷达中涉及到的探测技术。最后例举了利用拉曼激光雷达对气象参数测量的典型应用。



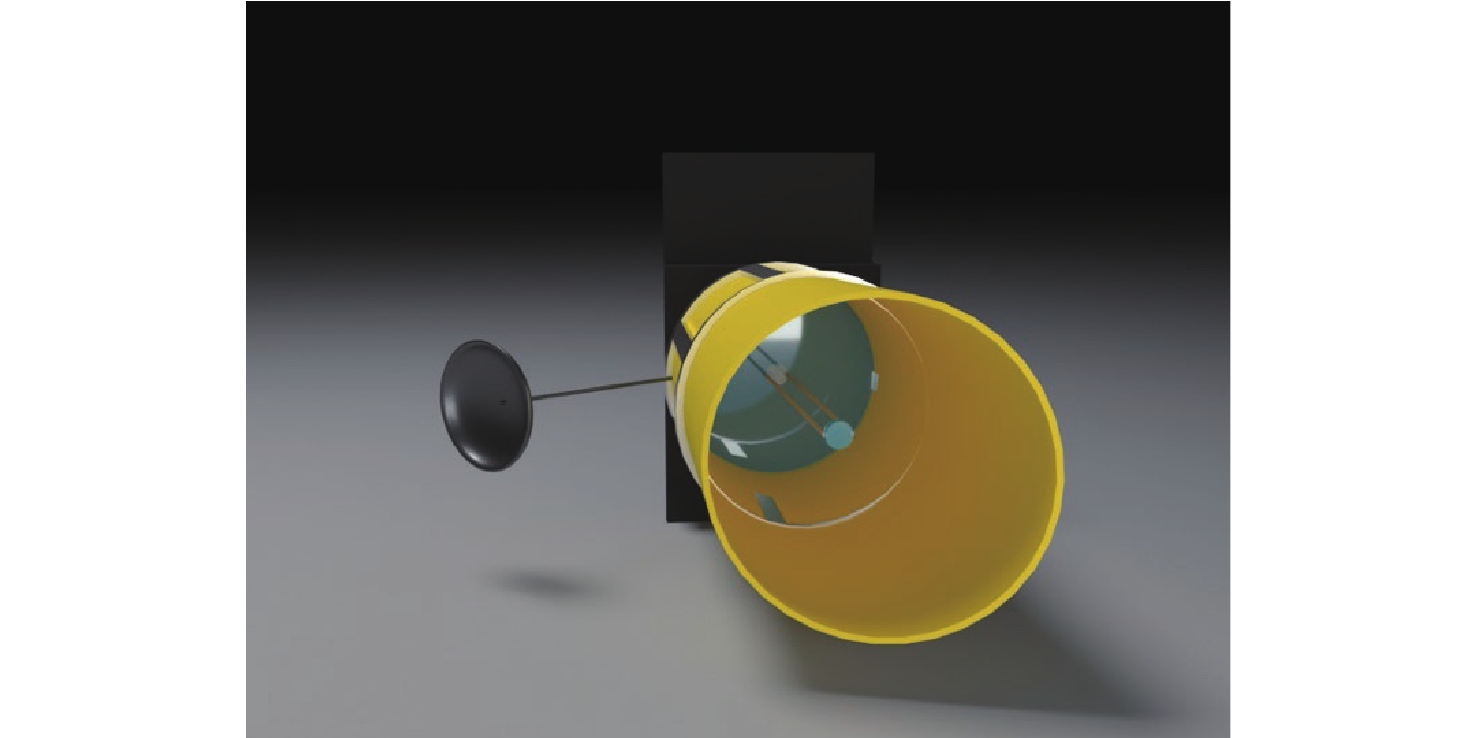
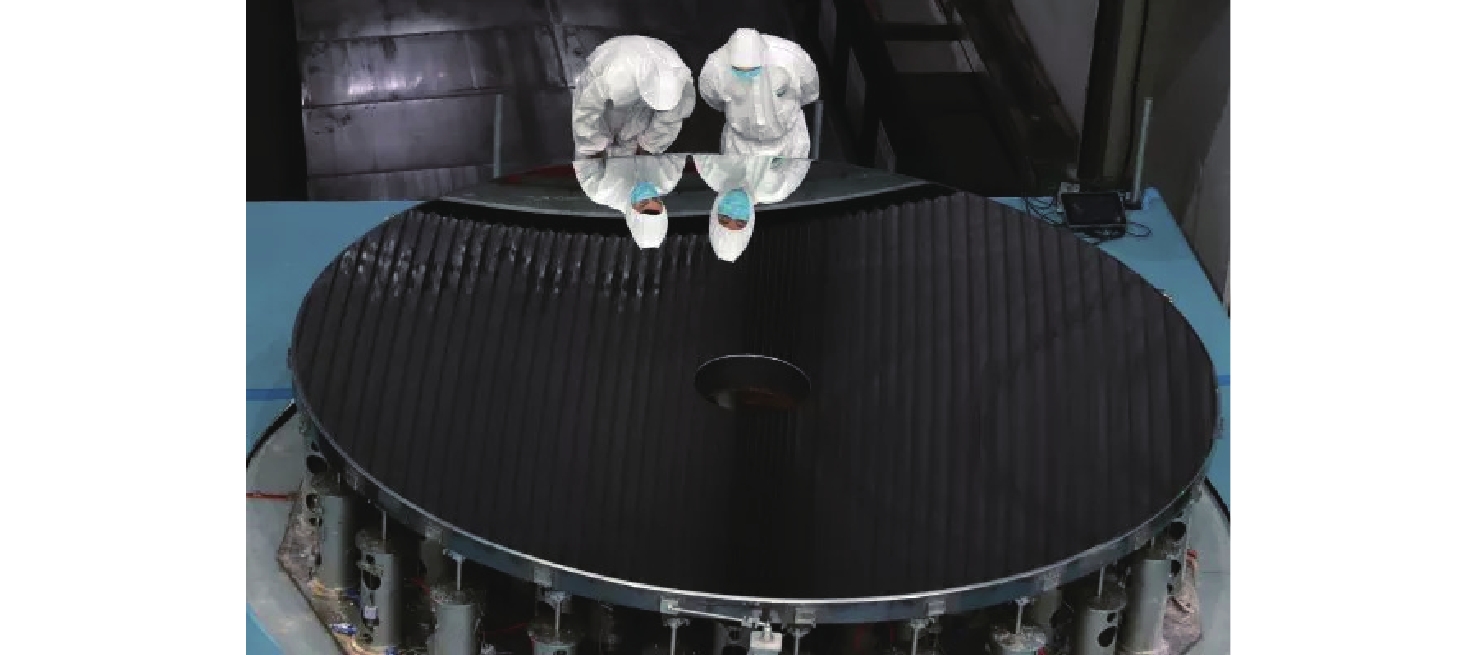
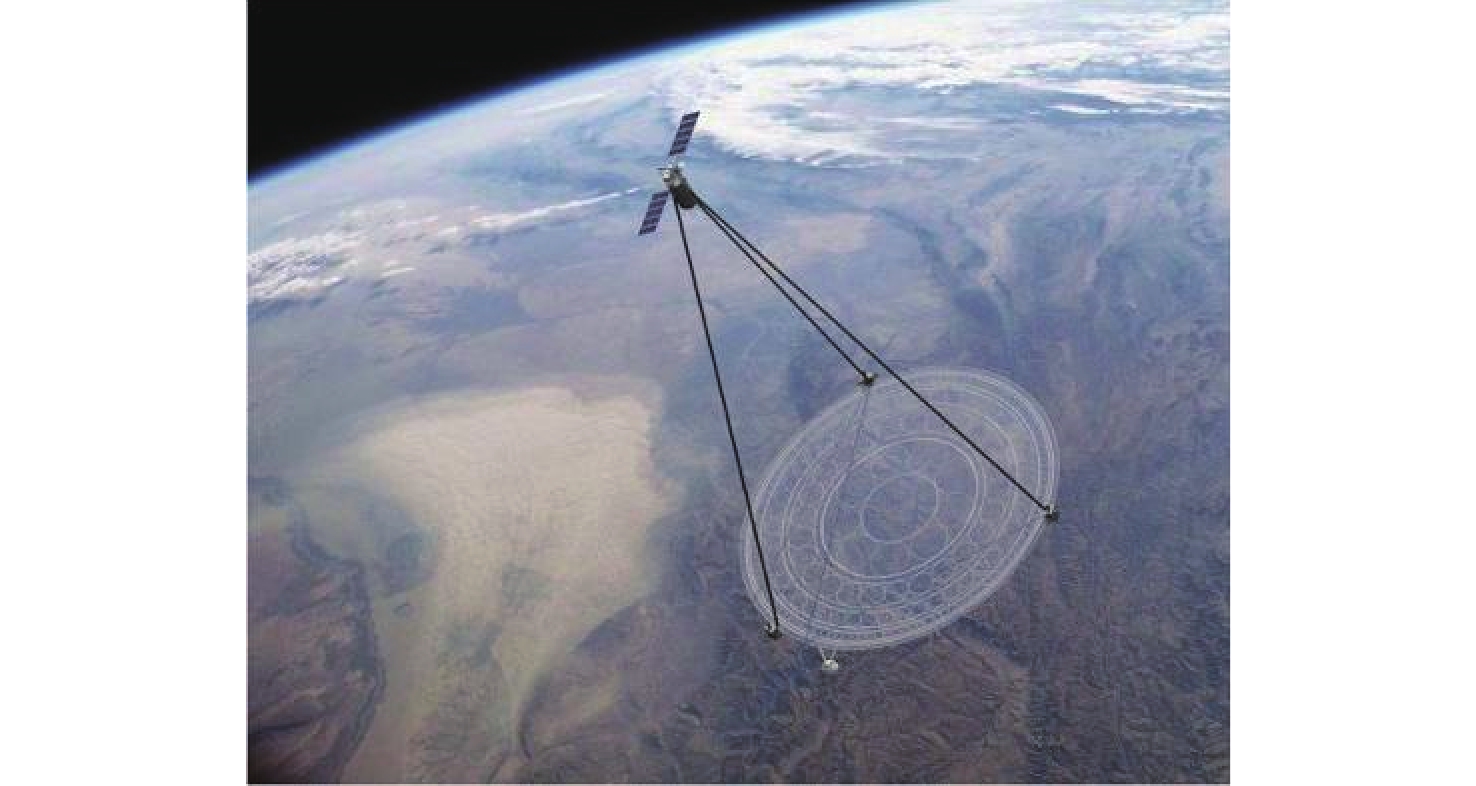
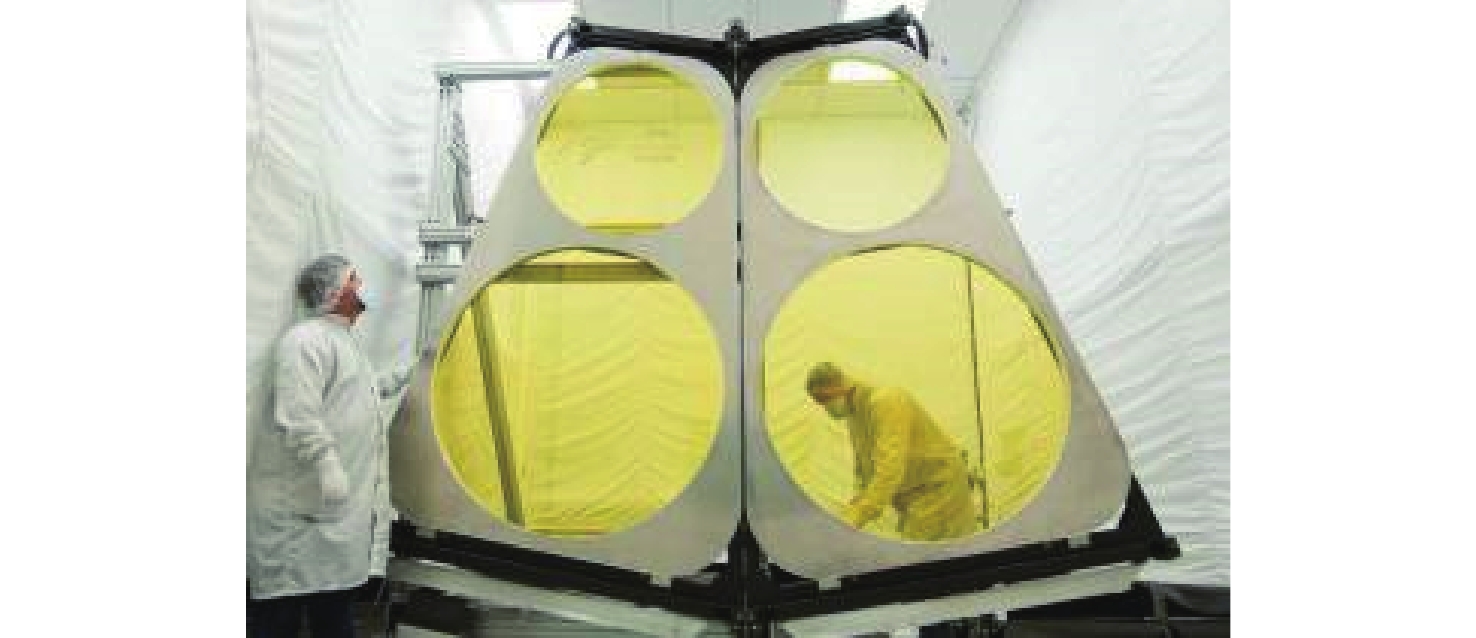
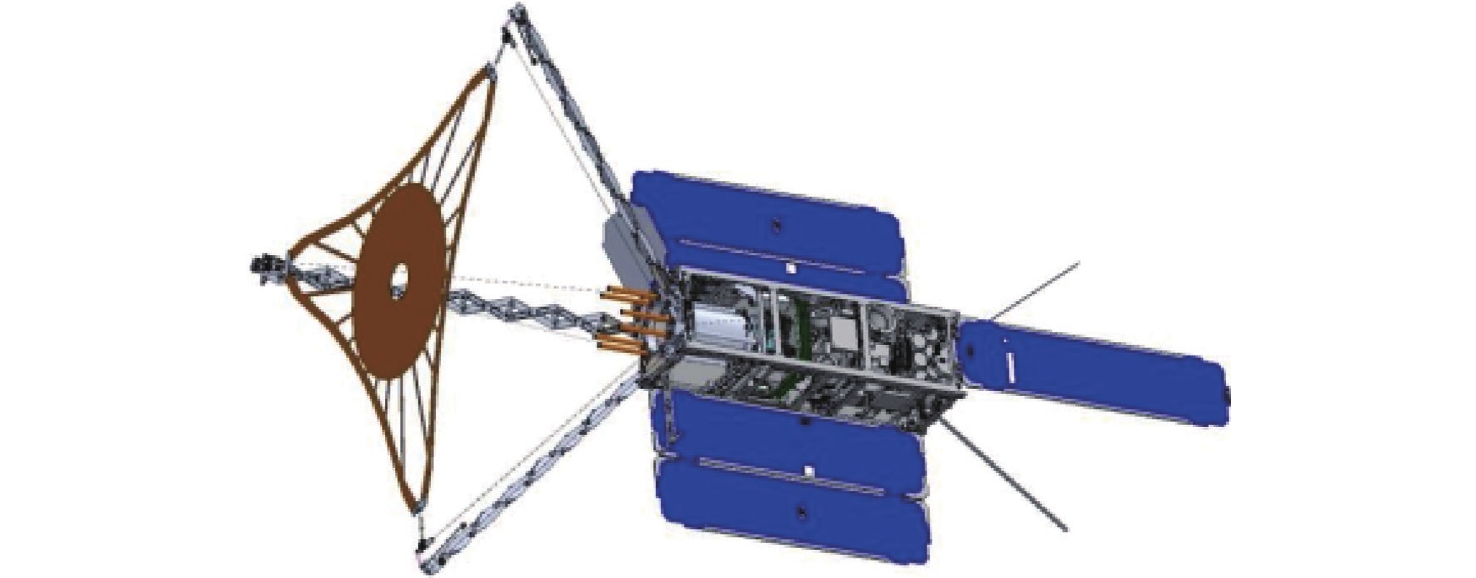
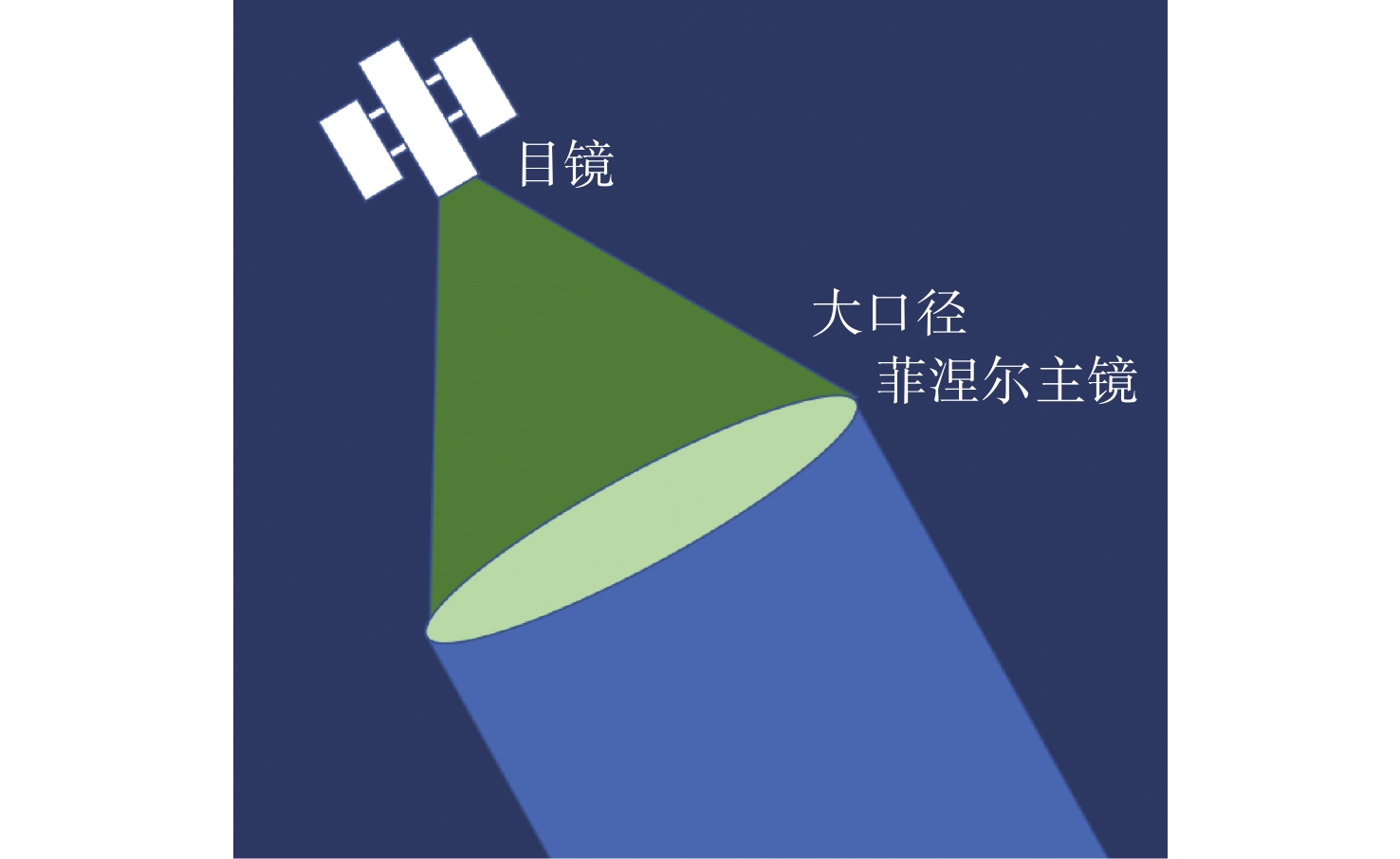
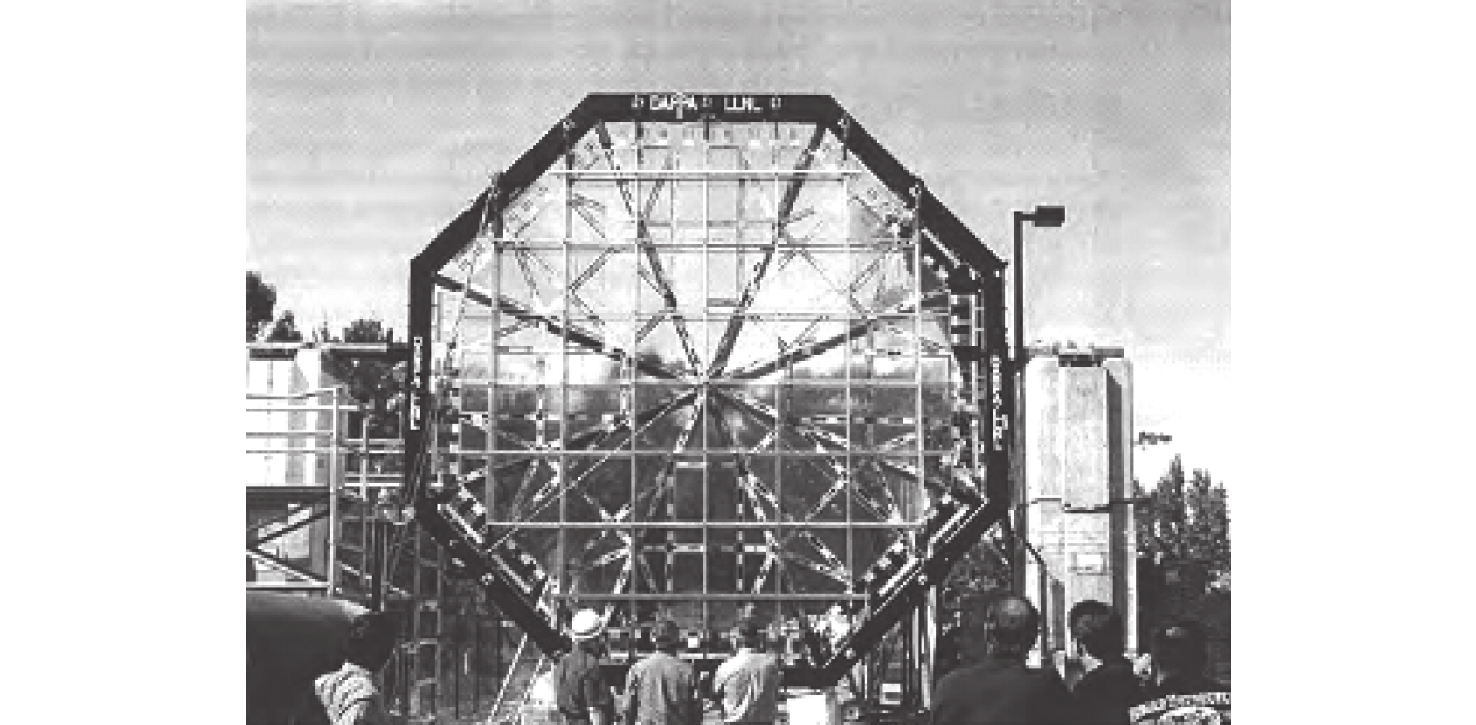
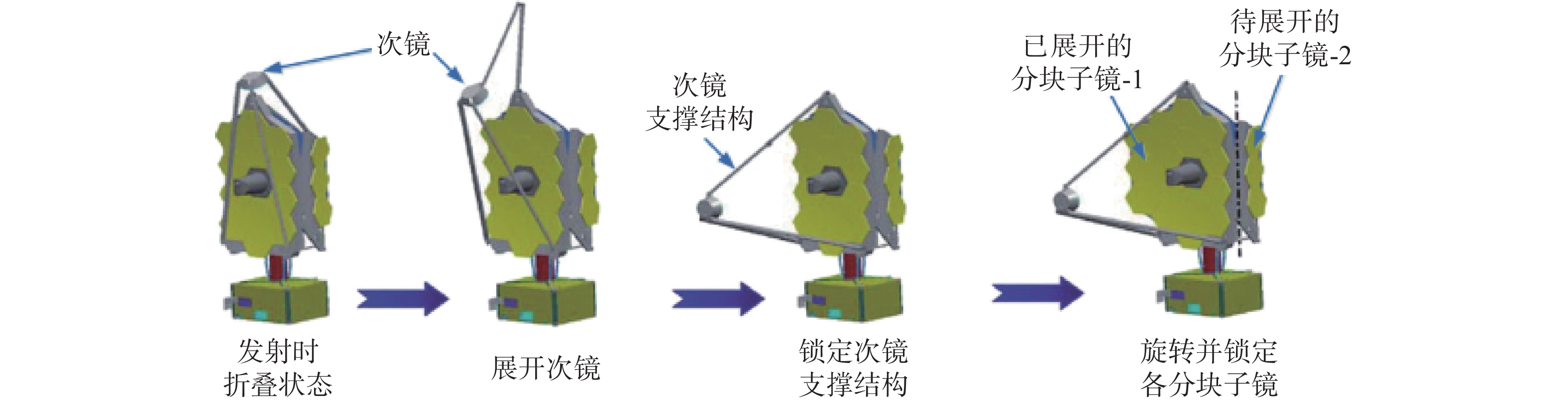
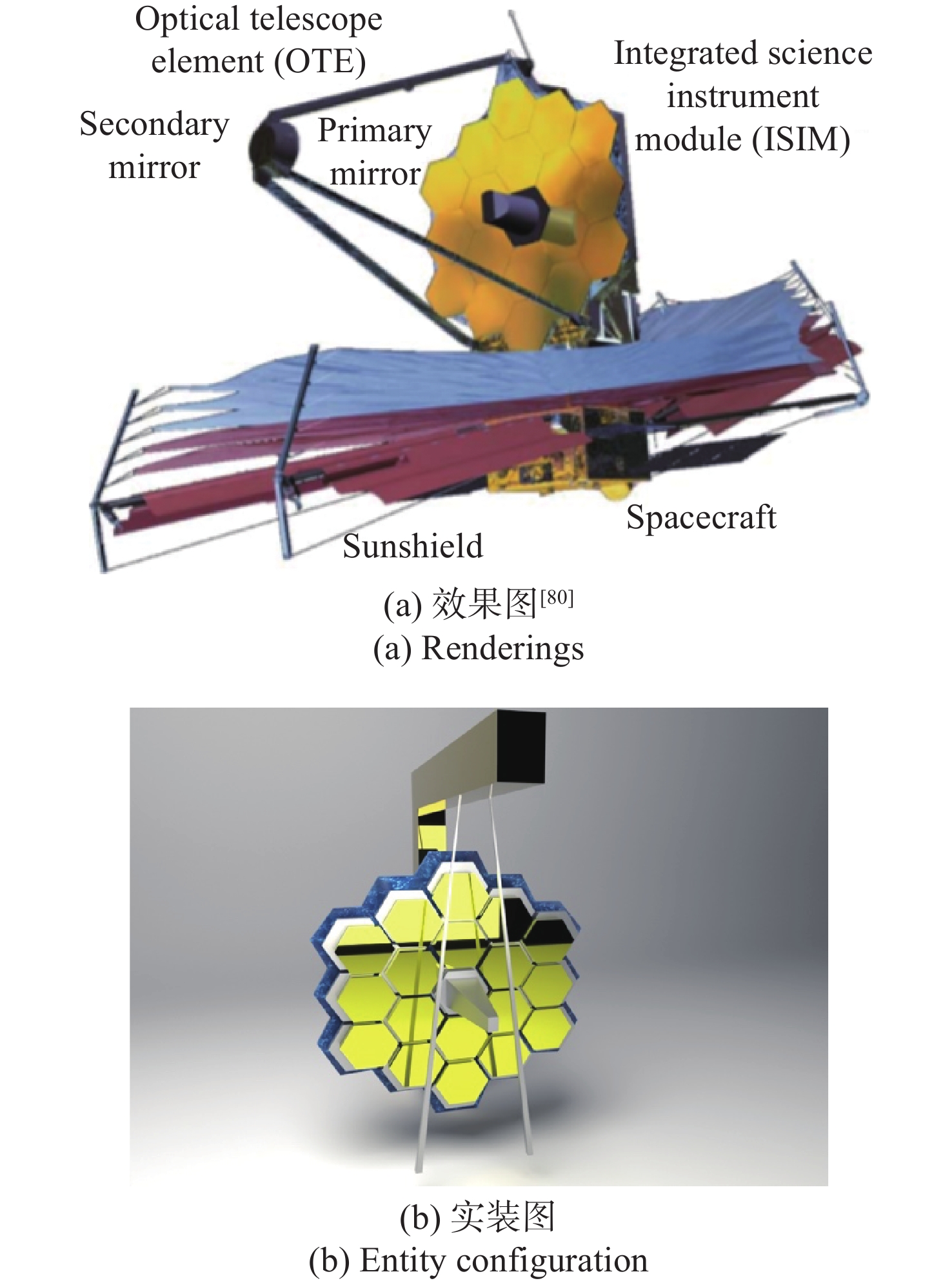
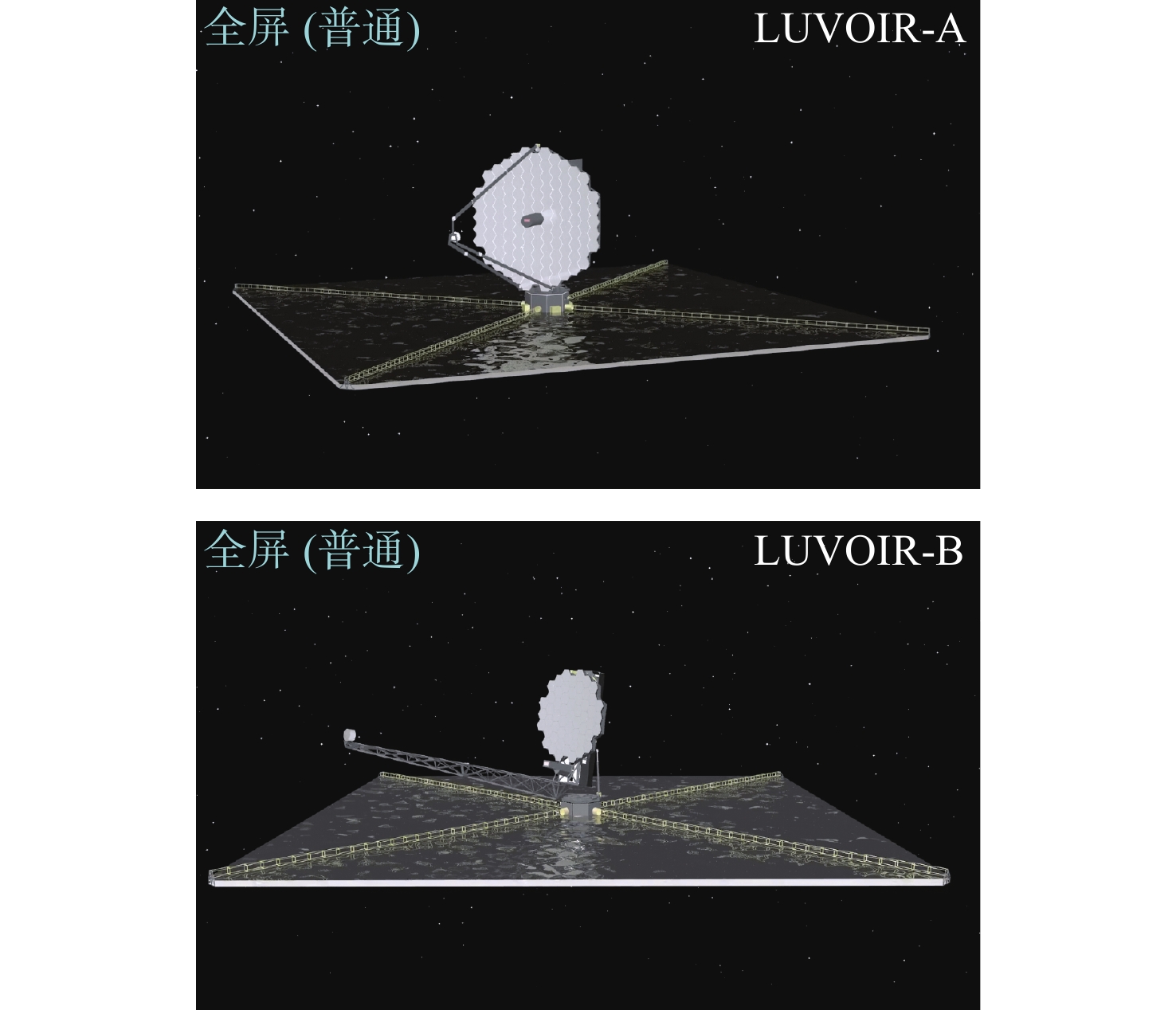
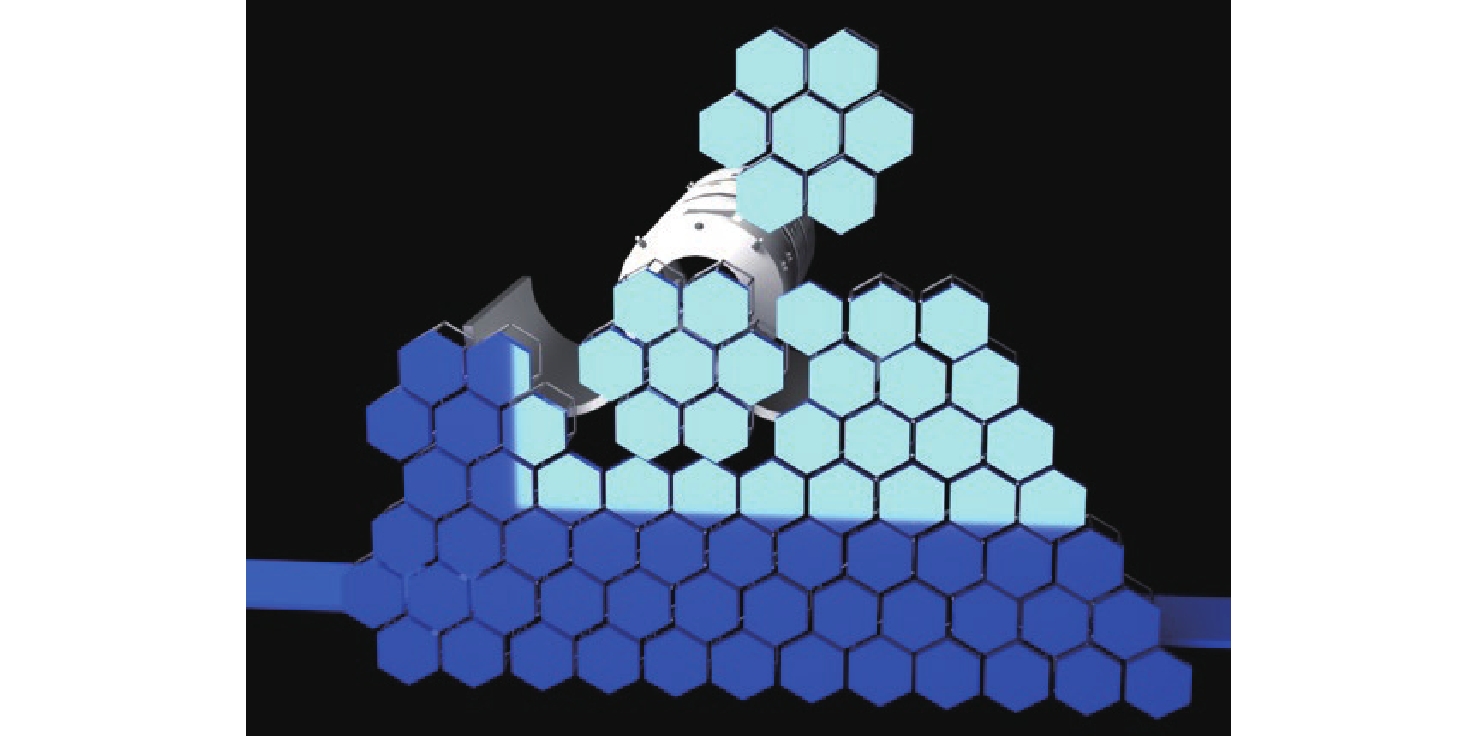
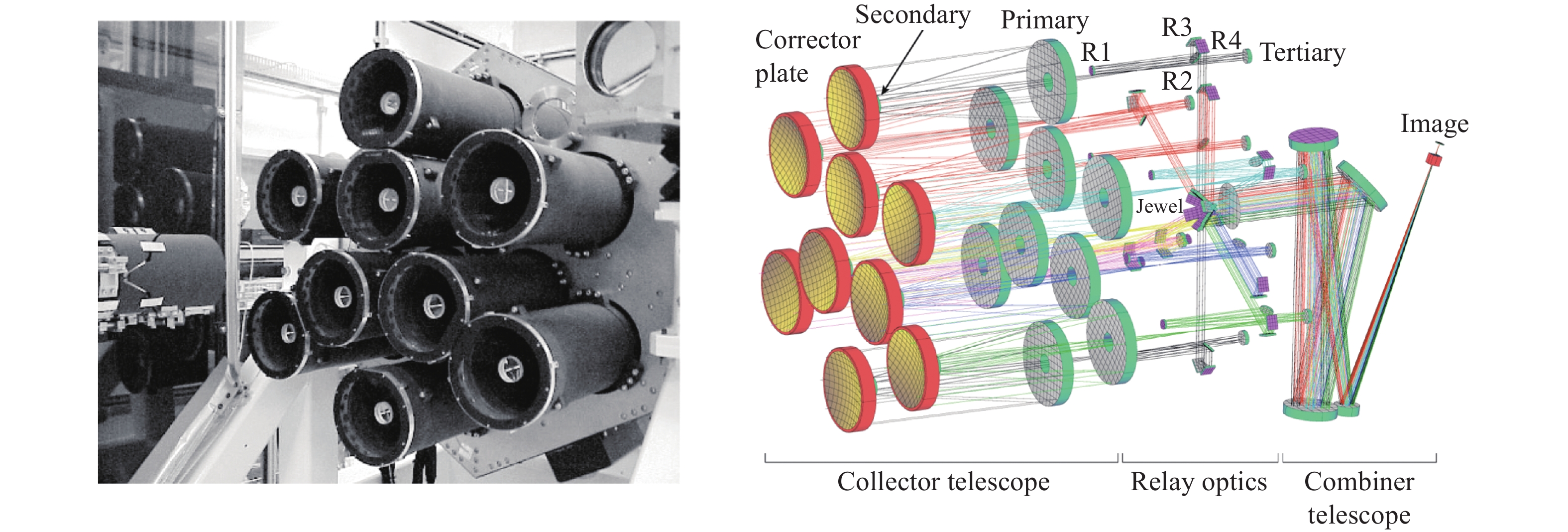
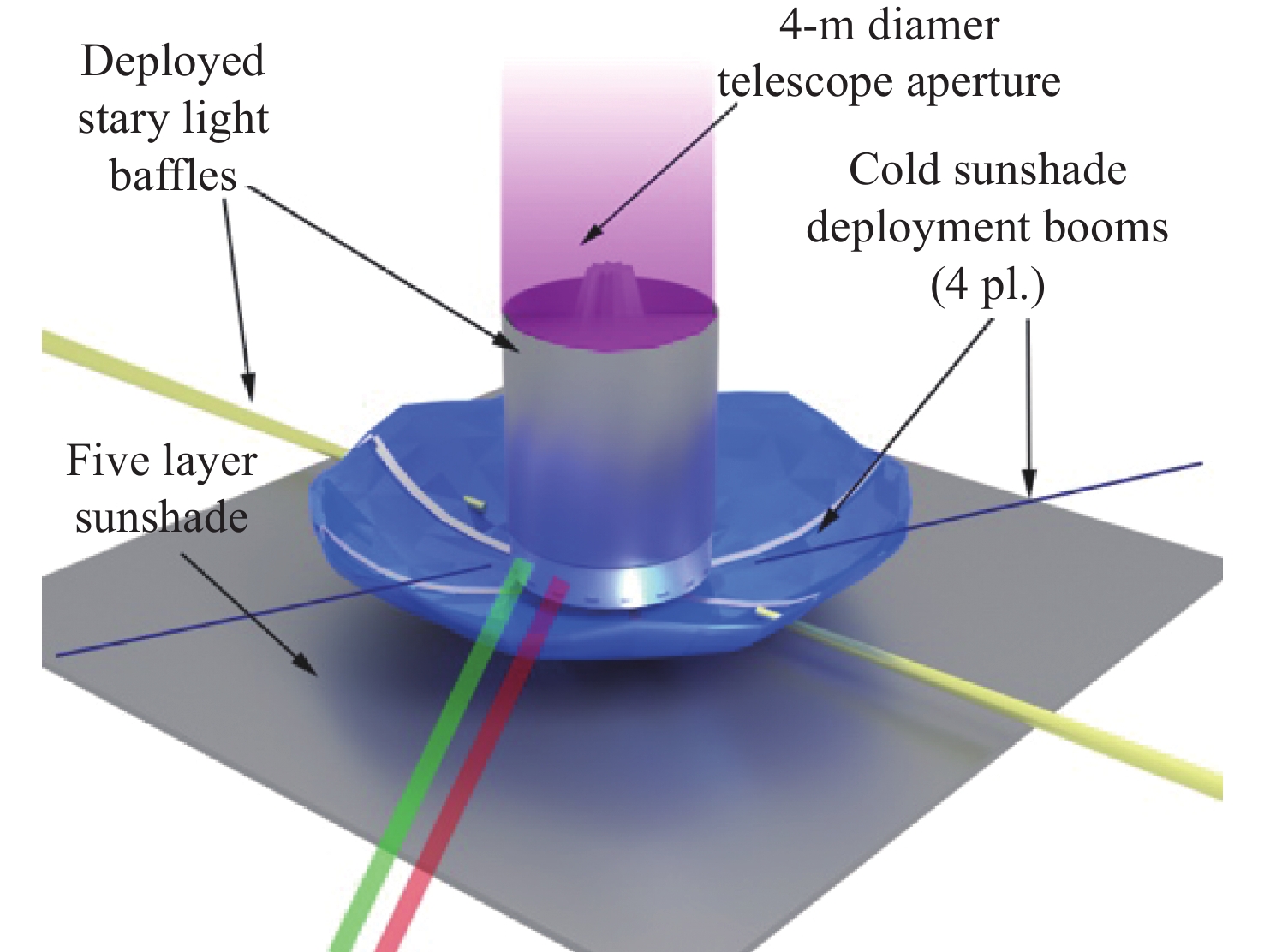
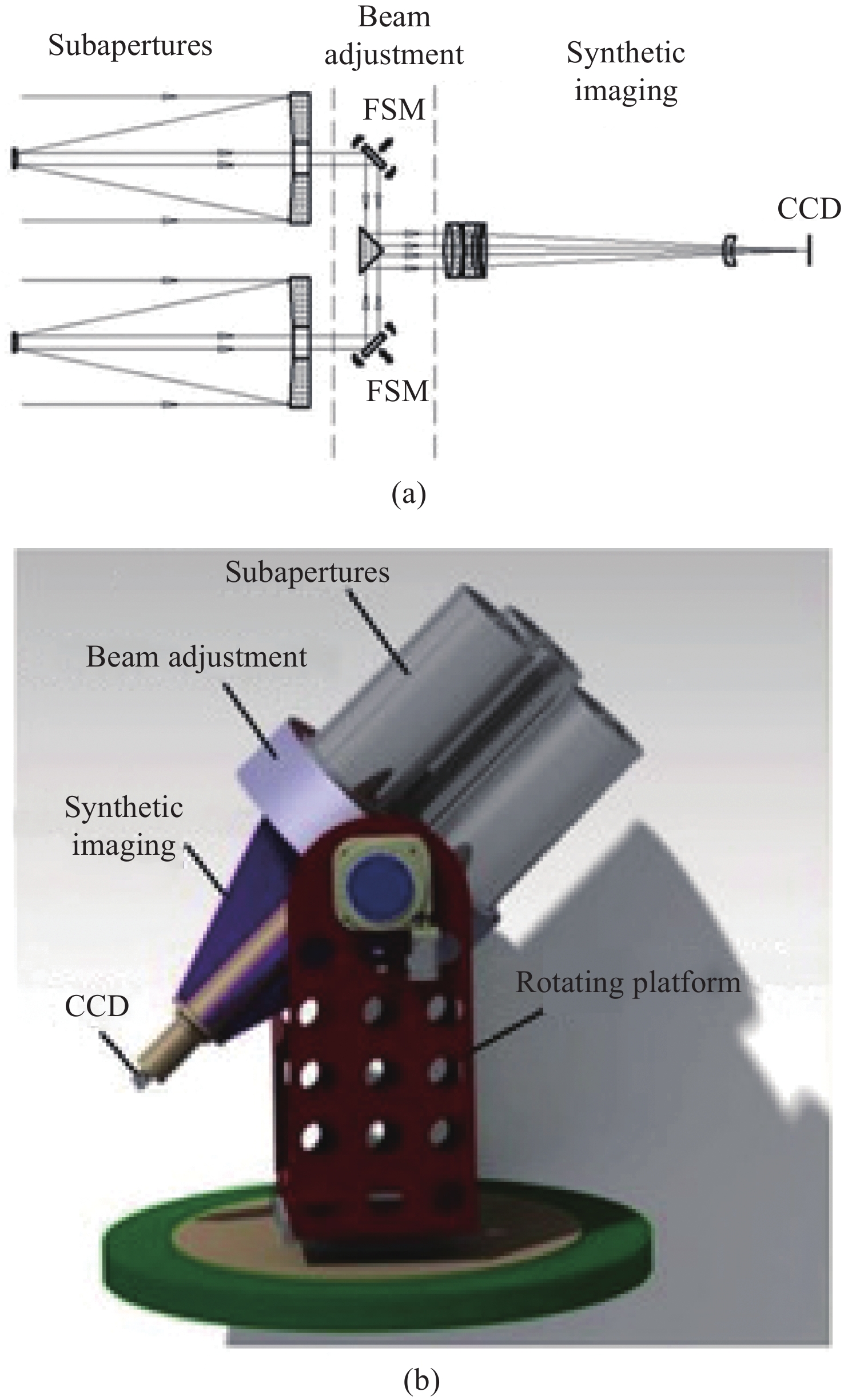
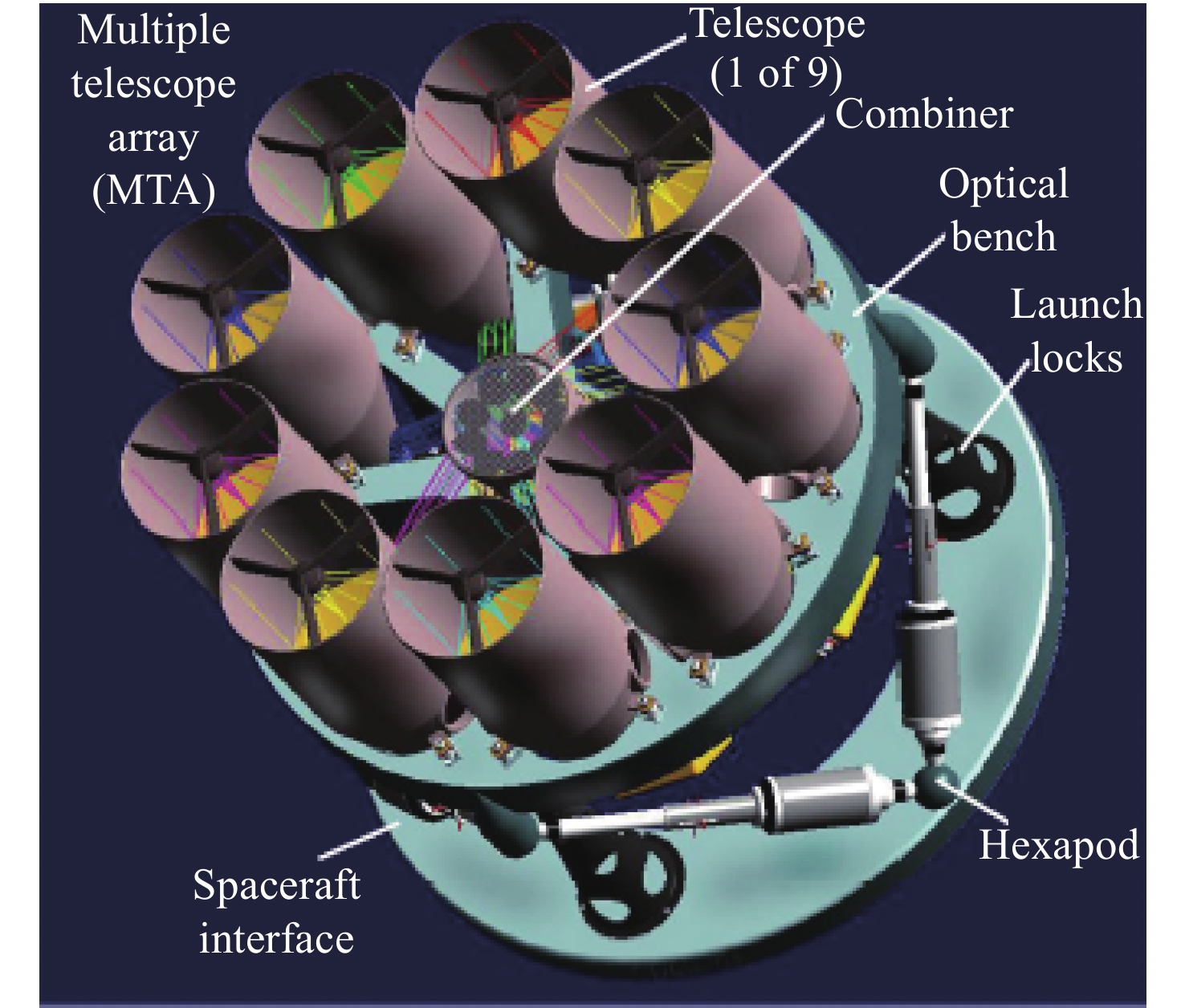
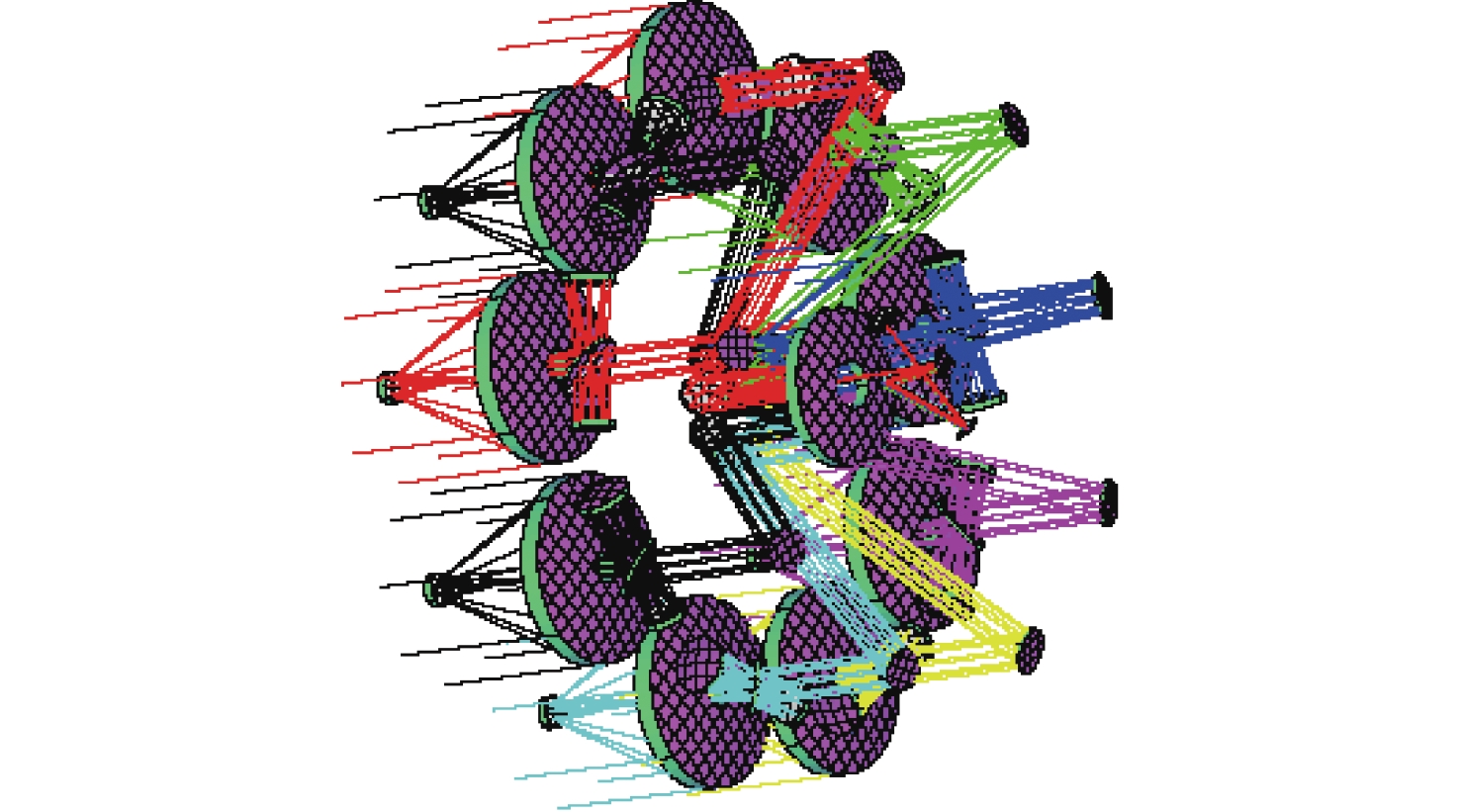
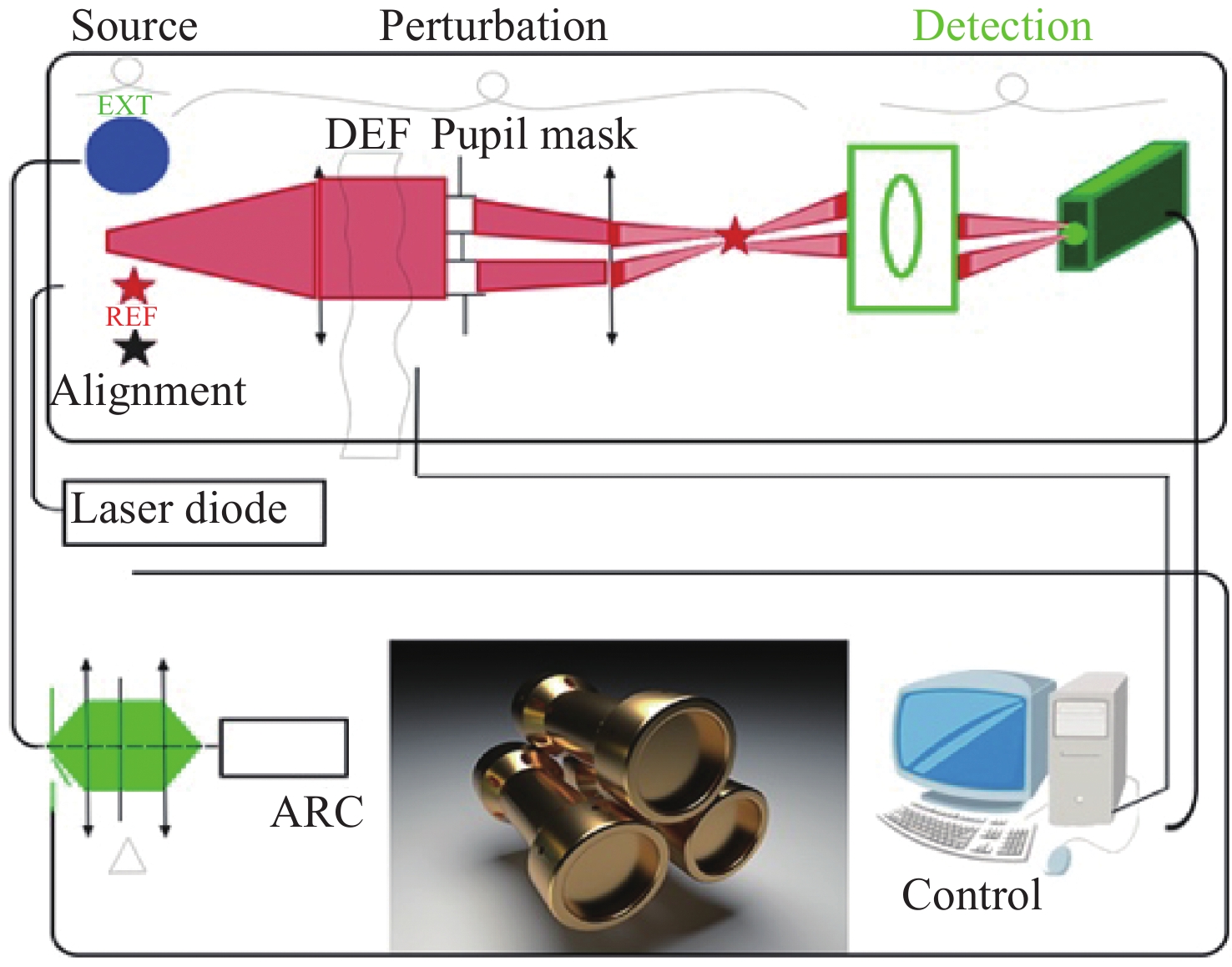
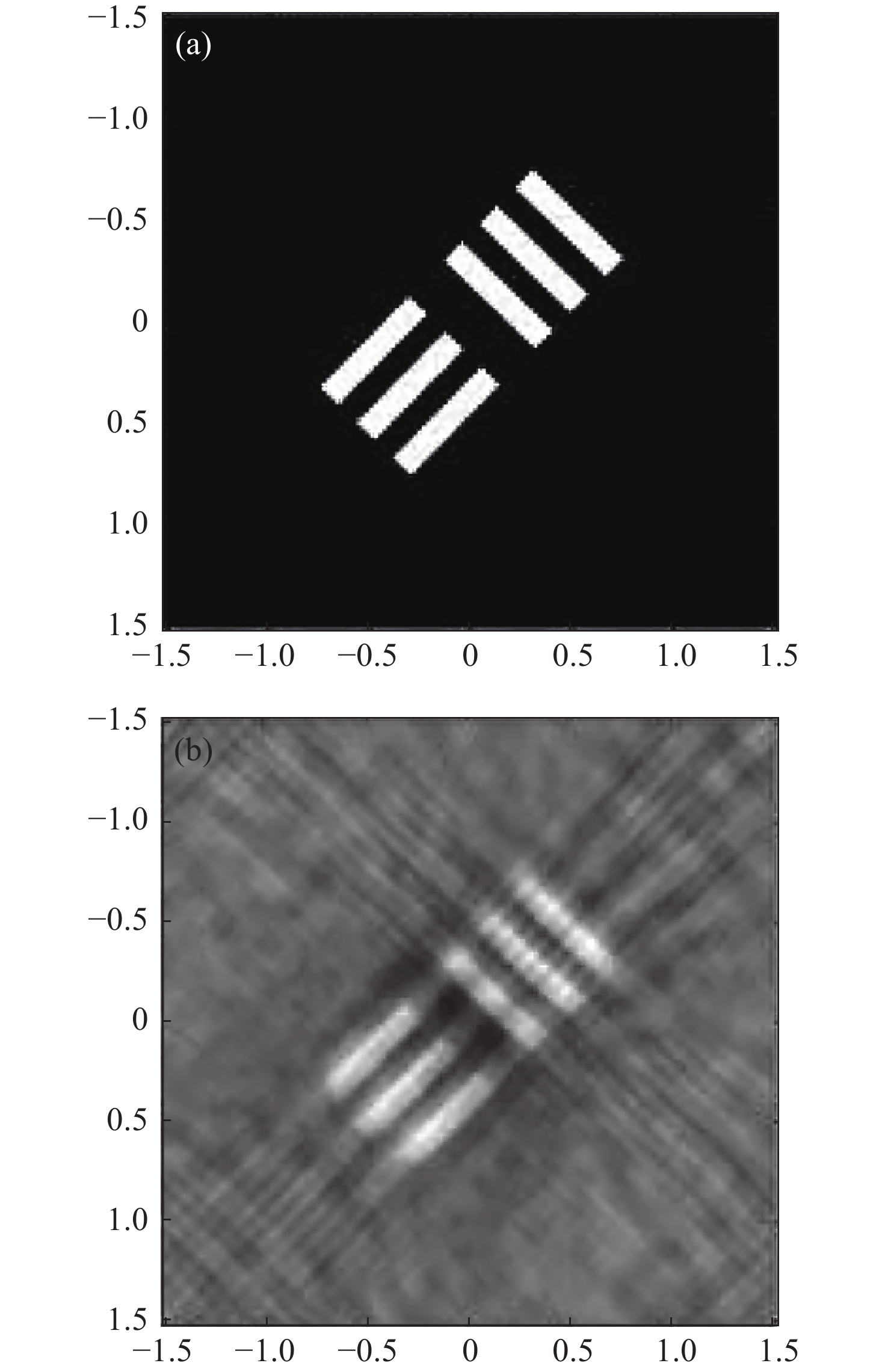
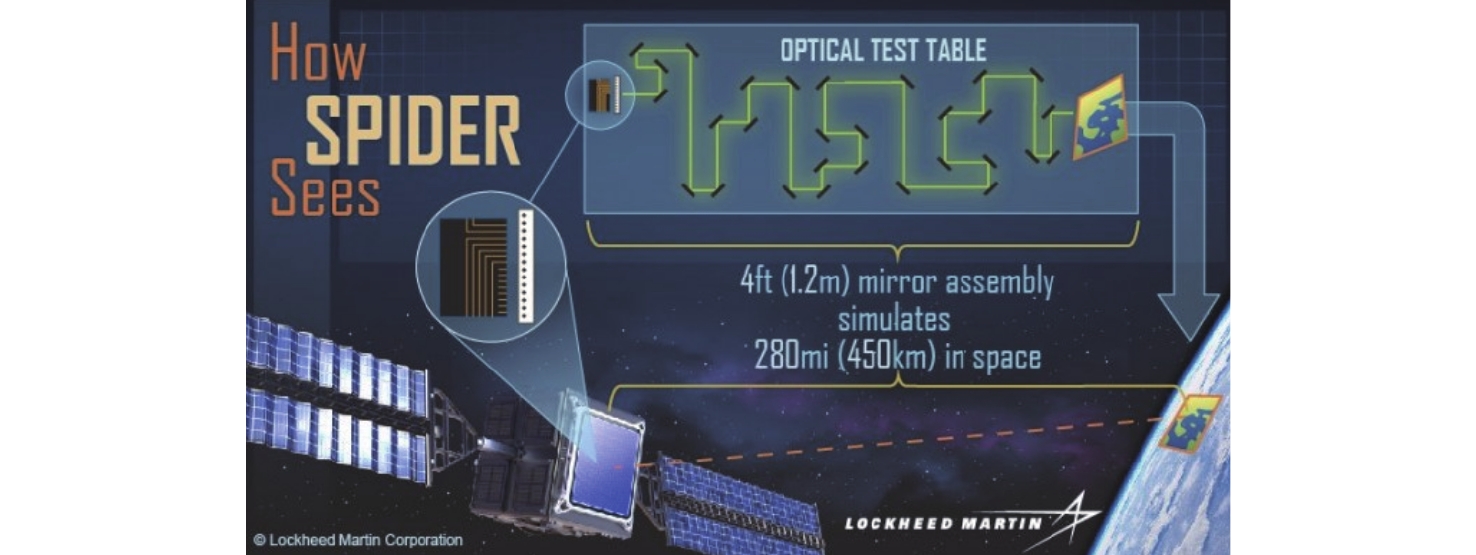
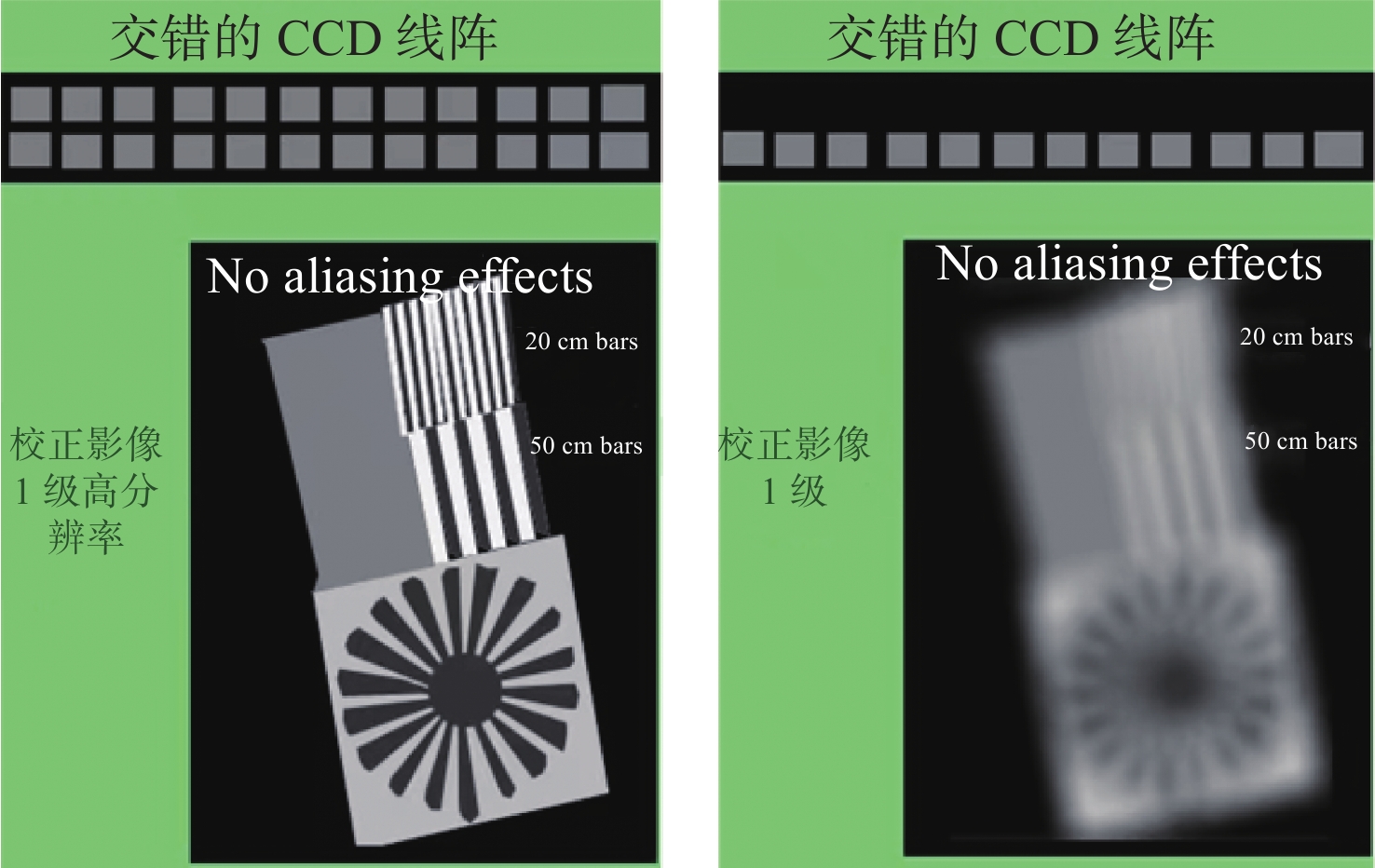
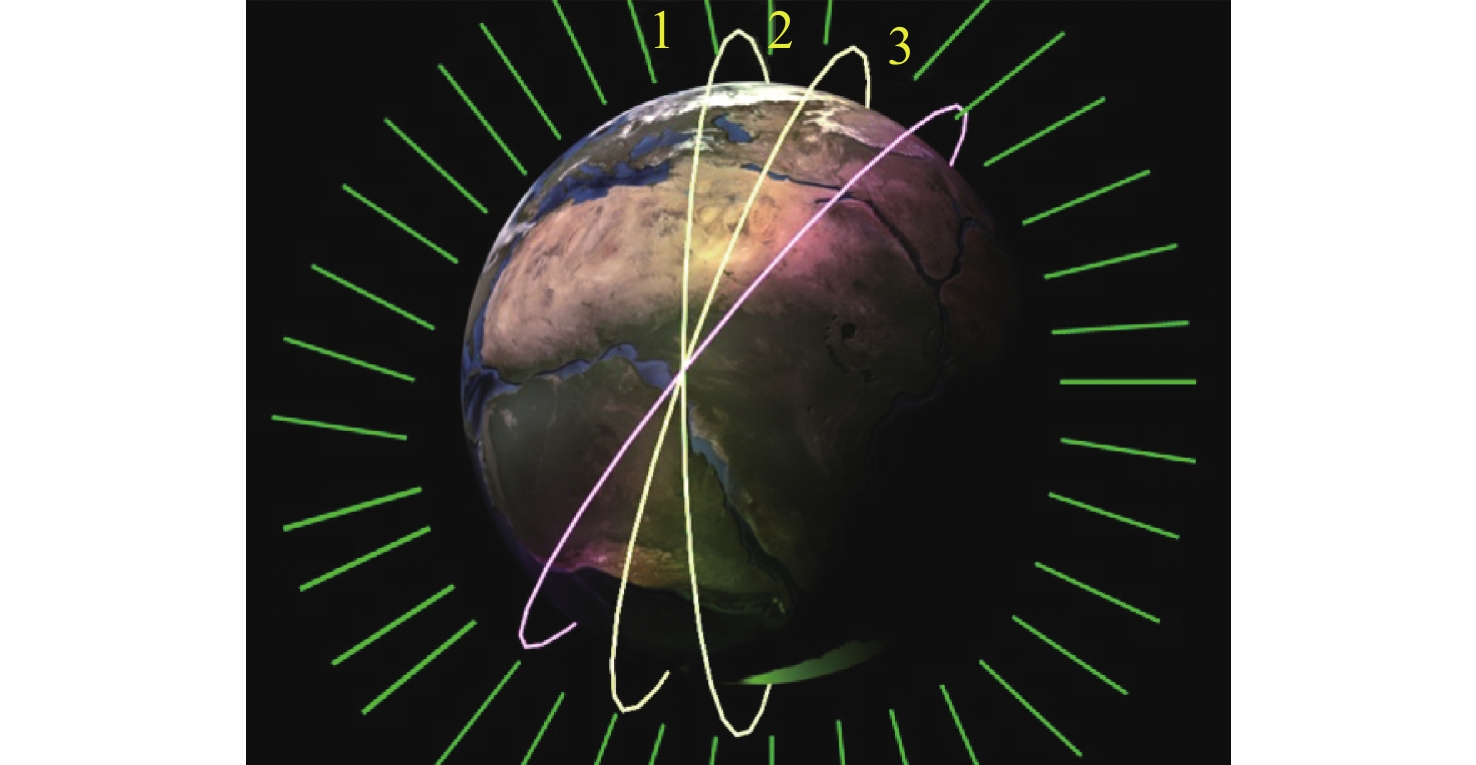
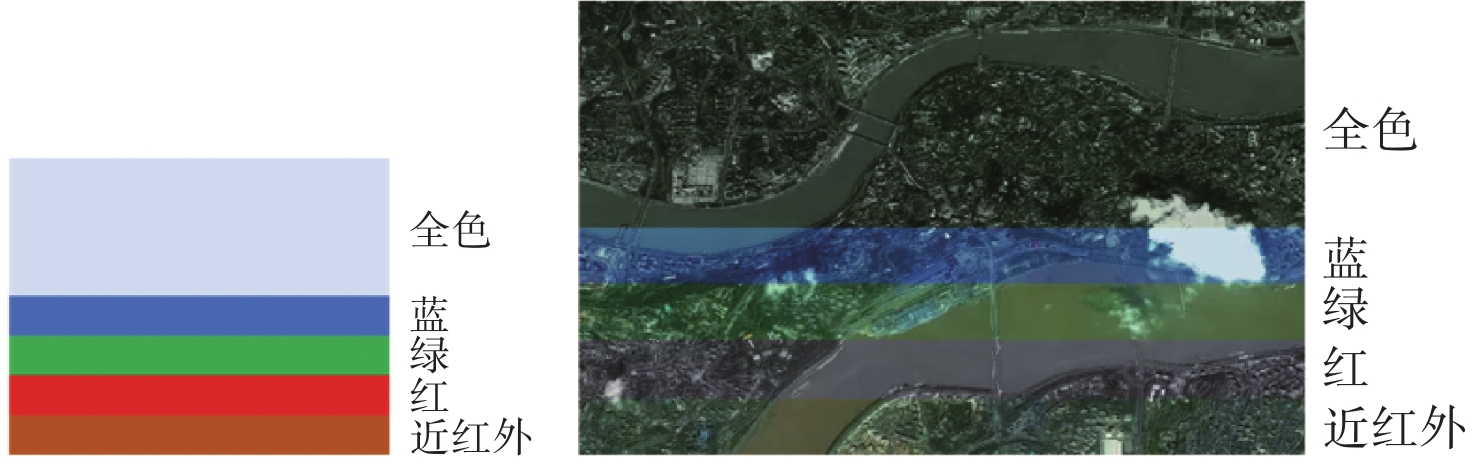
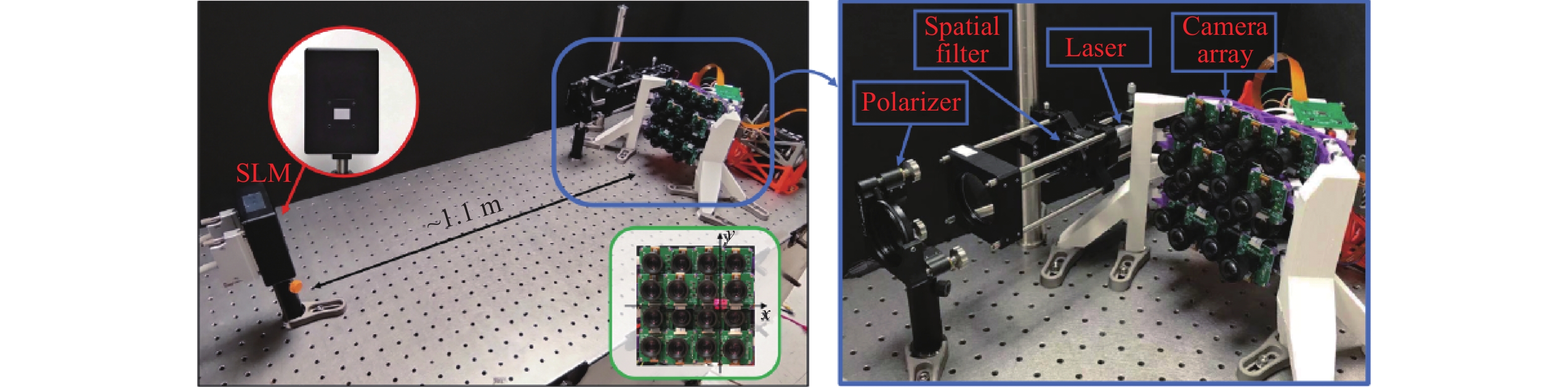
随着光学成像技术的不断发展和遥感应用需求的日益增长,跨尺度高分辨率光学技术在遥感领域得到广泛应用。为了获得更多的目标细节信息,国内外研究学者在不同技术方向开展了相关研究。本文对遥感成像技术进行了总结分类,介绍了具有代表性的航天高分辨率对地光学遥感载荷技术,重点关注单体结构主镜、可展开分块拼接主镜、光学干涉主镜、光栅衍射主镜、虚拟合成孔径、光子型综合孔径成像、计算超分辨成像、编队合成孔径等成像模式,为高分辨率对地光学遥感载荷发展提供新的发展思路。

























随着激光技术的飞速发展,激光在医疗领域中的应用得到了日益广泛的关注。由于其具有无接触、精度高、损伤小、便携性和操作灵活等优点,激光医疗极大地丰富了临床医疗的技术手段,在部分疾病的治疗中逐渐取代了传统方法,提升了医疗行业整体的技术水平。当前,激光医疗的市场占有率不断增加,发展前景十分广阔。本文介绍了激光医疗技术和医用激光系统的要求,重点对激光医疗在各临床科室中的应用研究现状进行了全面阐述,最后针对我国激光医疗领域存在的问题给出了建议。
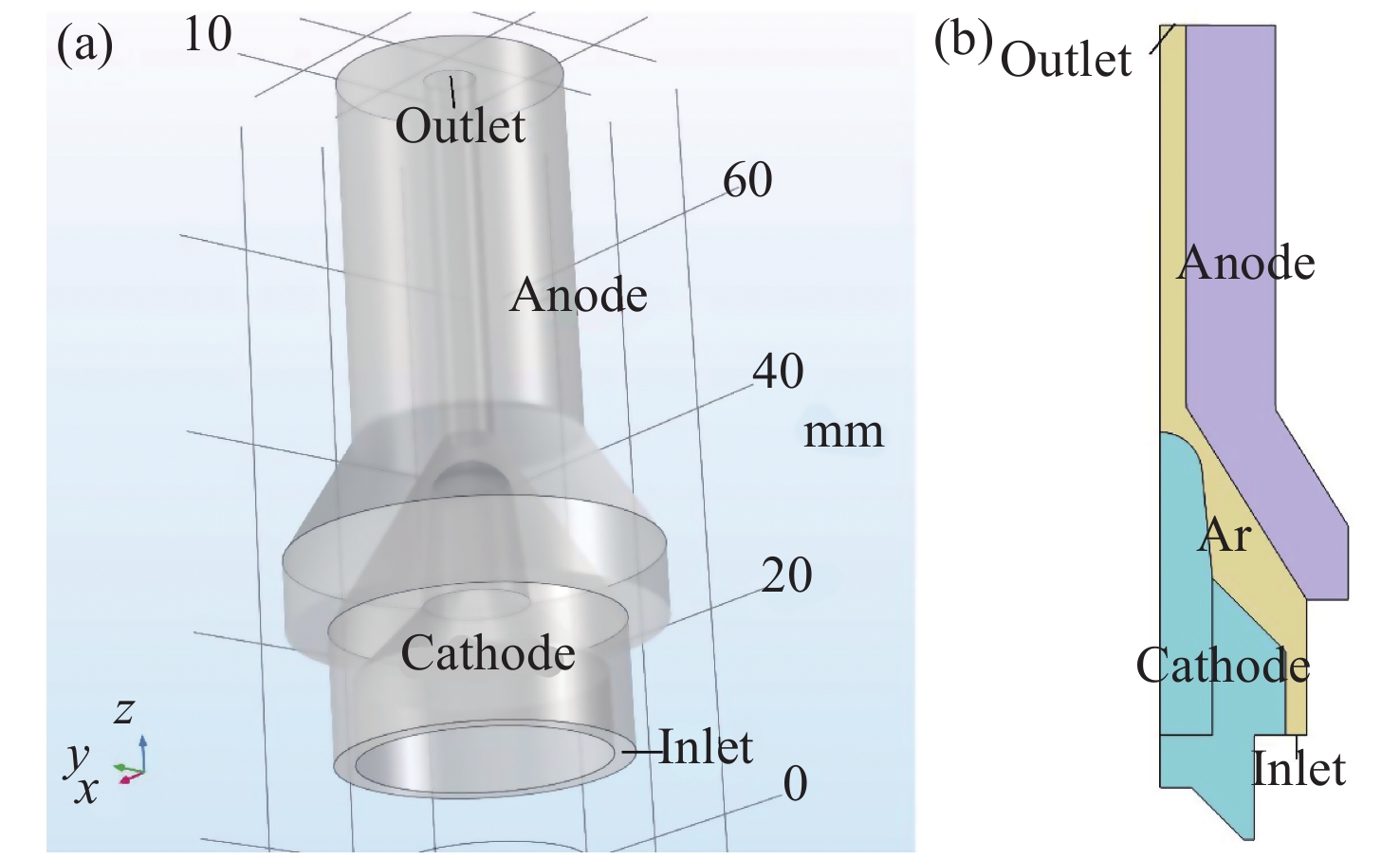
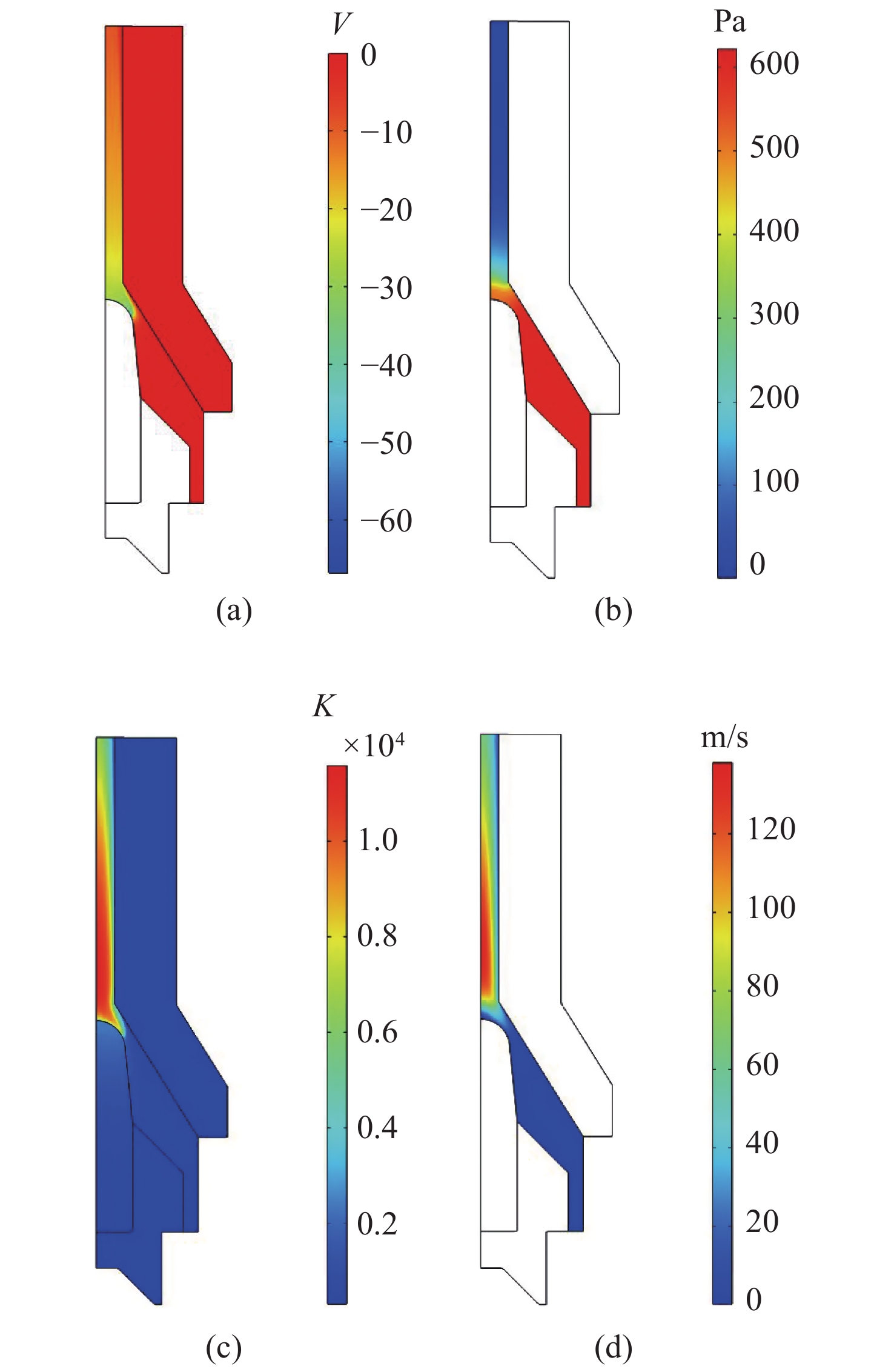
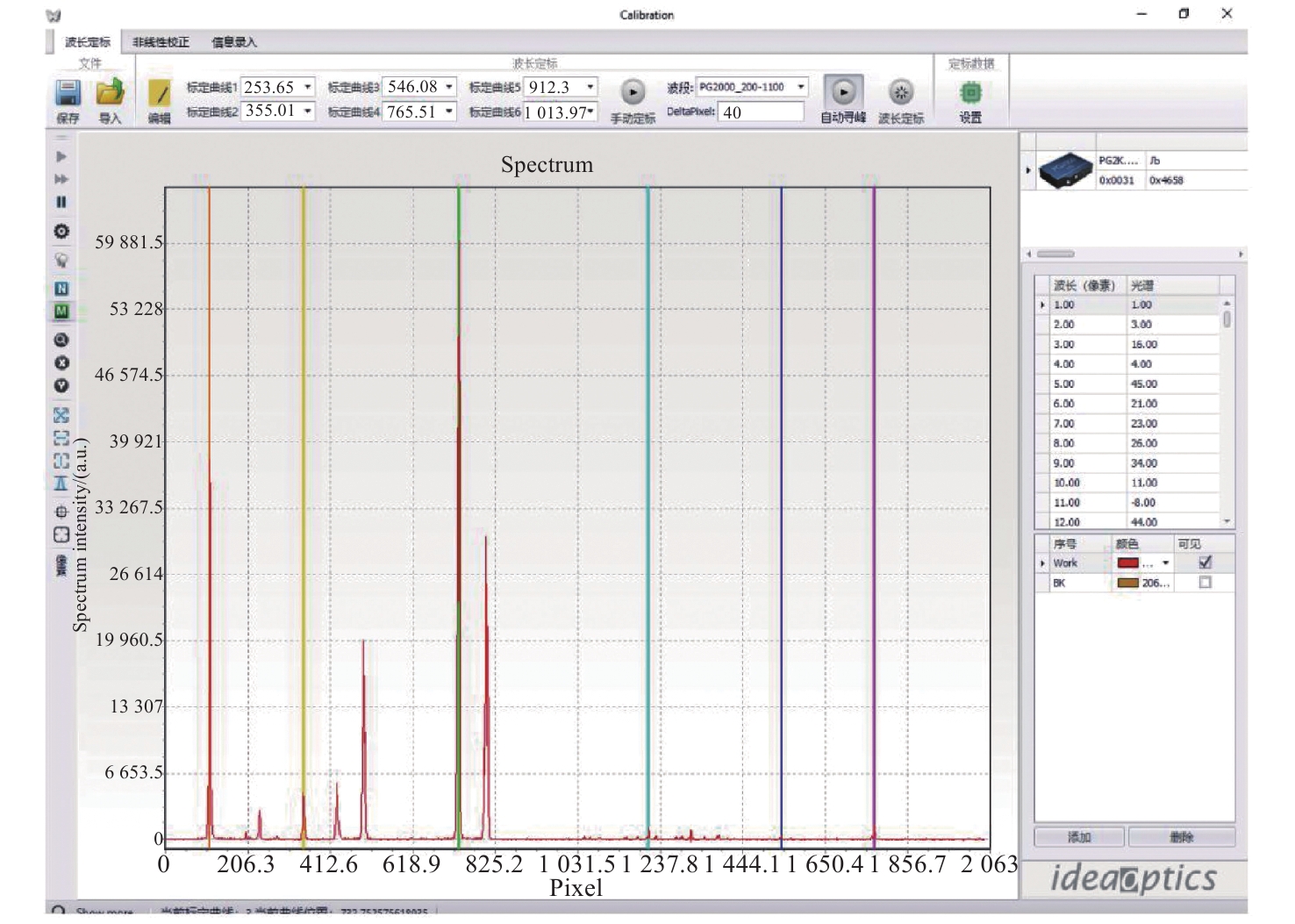
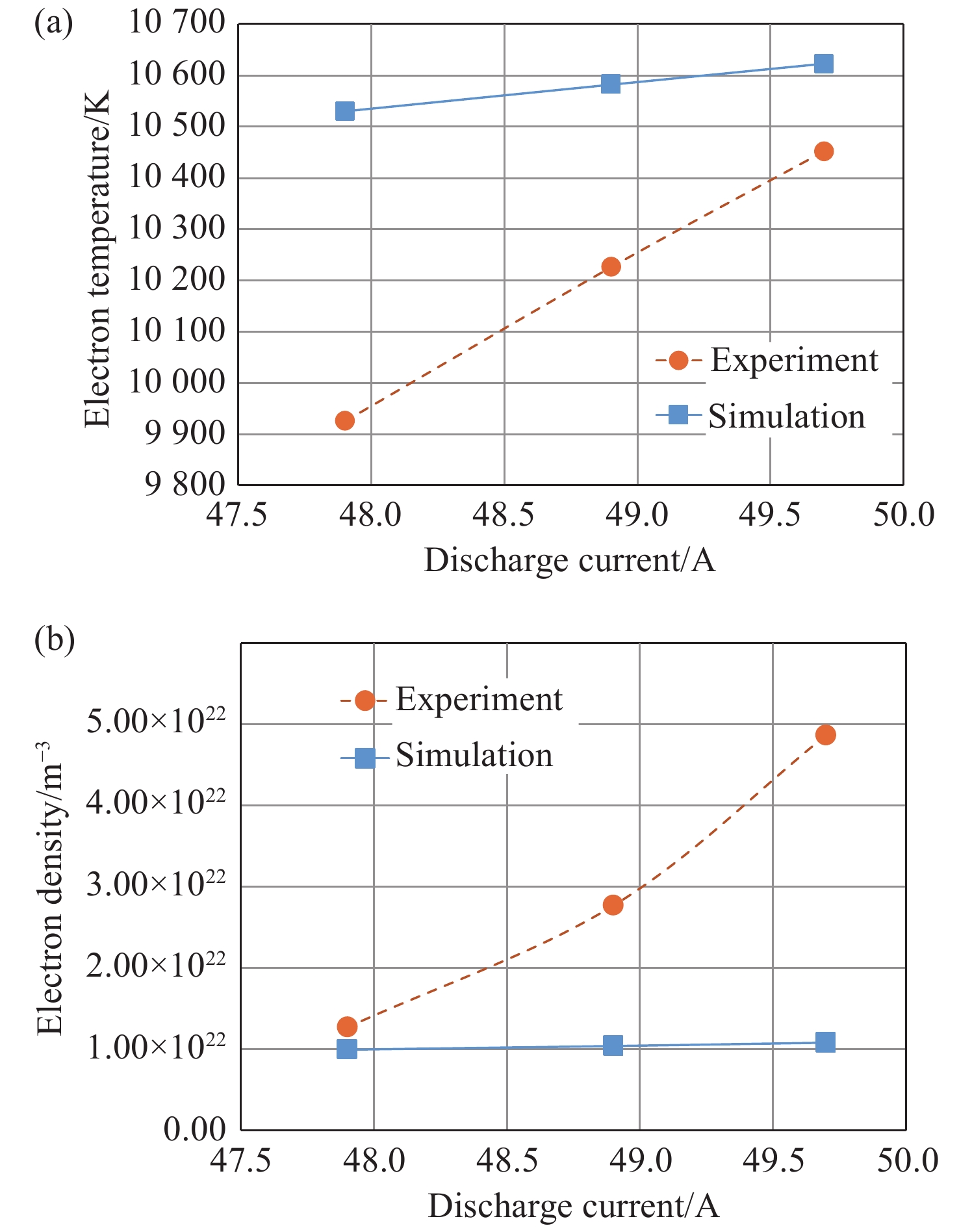
目前,电弧激励器的仿真研究仅局限于得到激励器产生的等离子体的电势、压力、温度和速度等工作特性,而其有关的等离子体状态参数仅限于用光谱诊断其电子温度和电子密度等,二者是分立的,本文试图将其二者统一起来。本文设计了电弧射流等离子体激励器,采用有限元法求解非线性多物理场方程,对此电弧射流等离子体激励器的工作特性进行了数值模拟,得到了激励器内部的电势、压力、温度和速度分布,并在此基础上计算了电子密度,由激励器工况得到了激励器等离子体状态参数(电子温度和电子密度)的仿真计算模型。然后采用发射光谱诊断方法对射流等离子体进行了光谱诊断,利用分立谱线的强度比例法对等离子体电子密度进行计算。结果表明:电弧等离子体激励器诊断实验得到的最高电子温度为10505.8 K,最大电子密度为5.75×1022 m−3。对于不同工况下的等离子体电子温度和等离子体密度,实验和仿真结果数值均随入口气体流量增大及放电电流的增大而增大。表明对于所设计的小型化、高射流速度的电弧射流激励器等离子体状态参数的仿真计算模型是合理且适用的。说明将激励器工作特性仿真与光谱诊断的电子温度、密度统一考虑是基本成功的,同时还有值得进一步改进的地方。



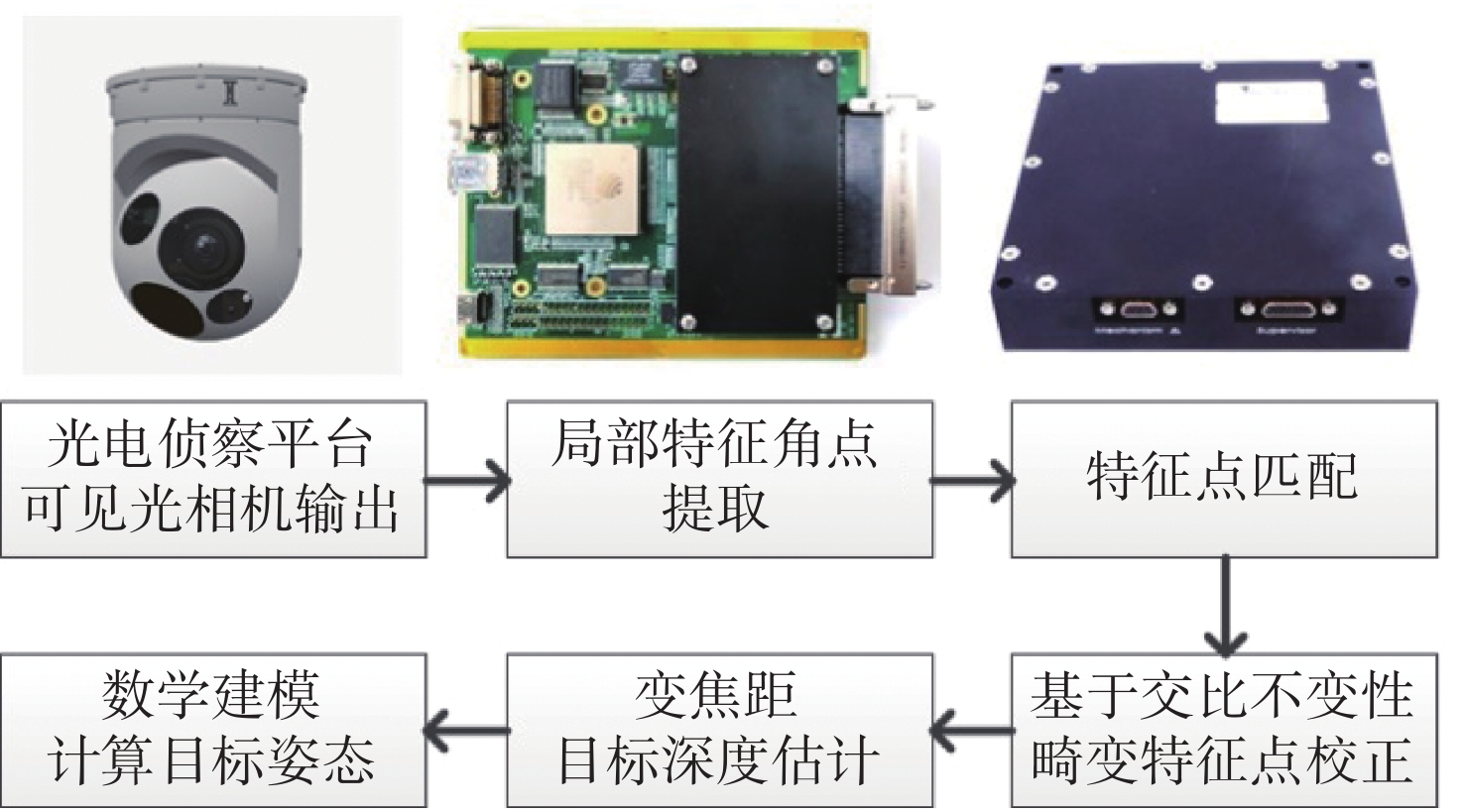
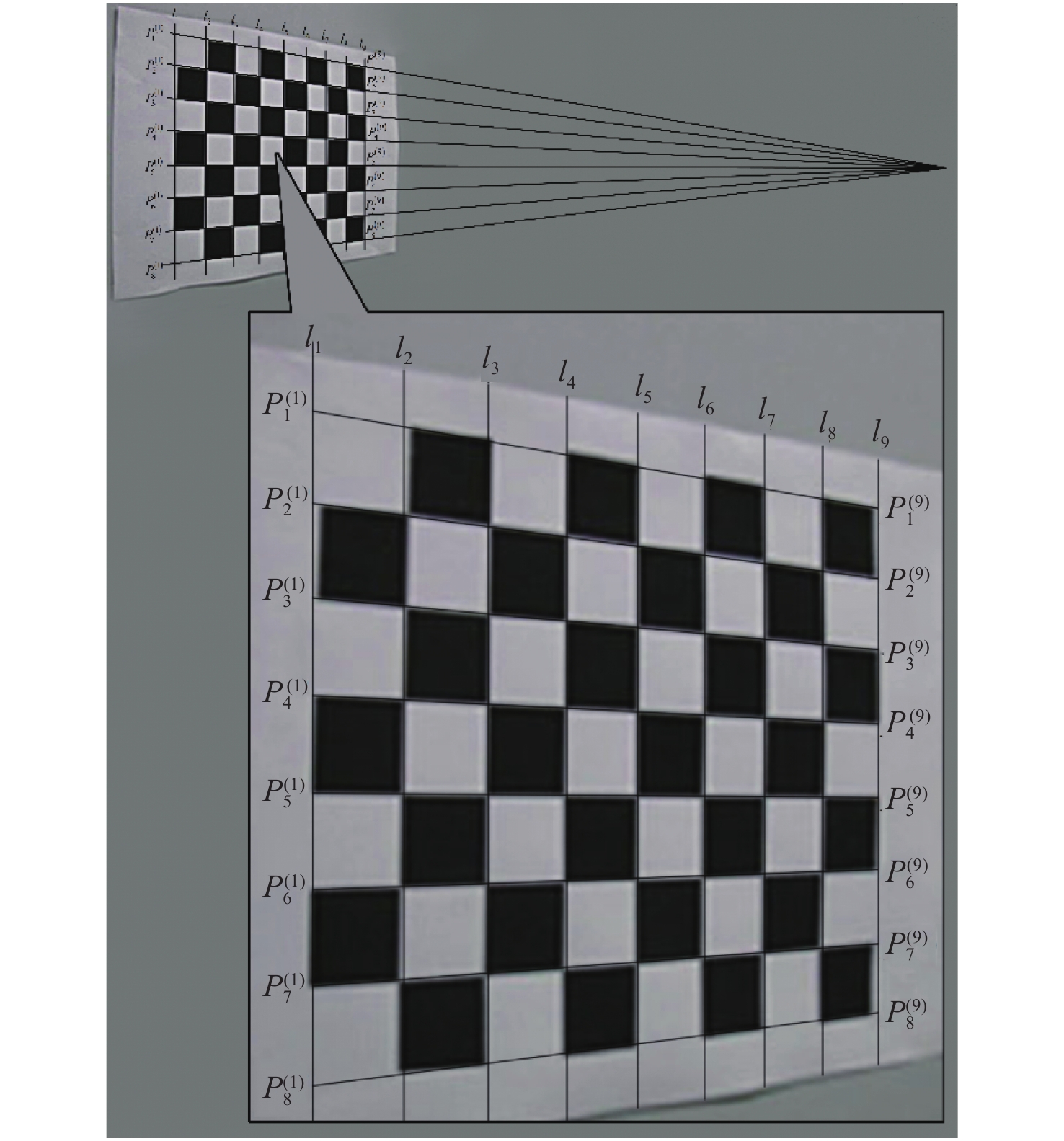
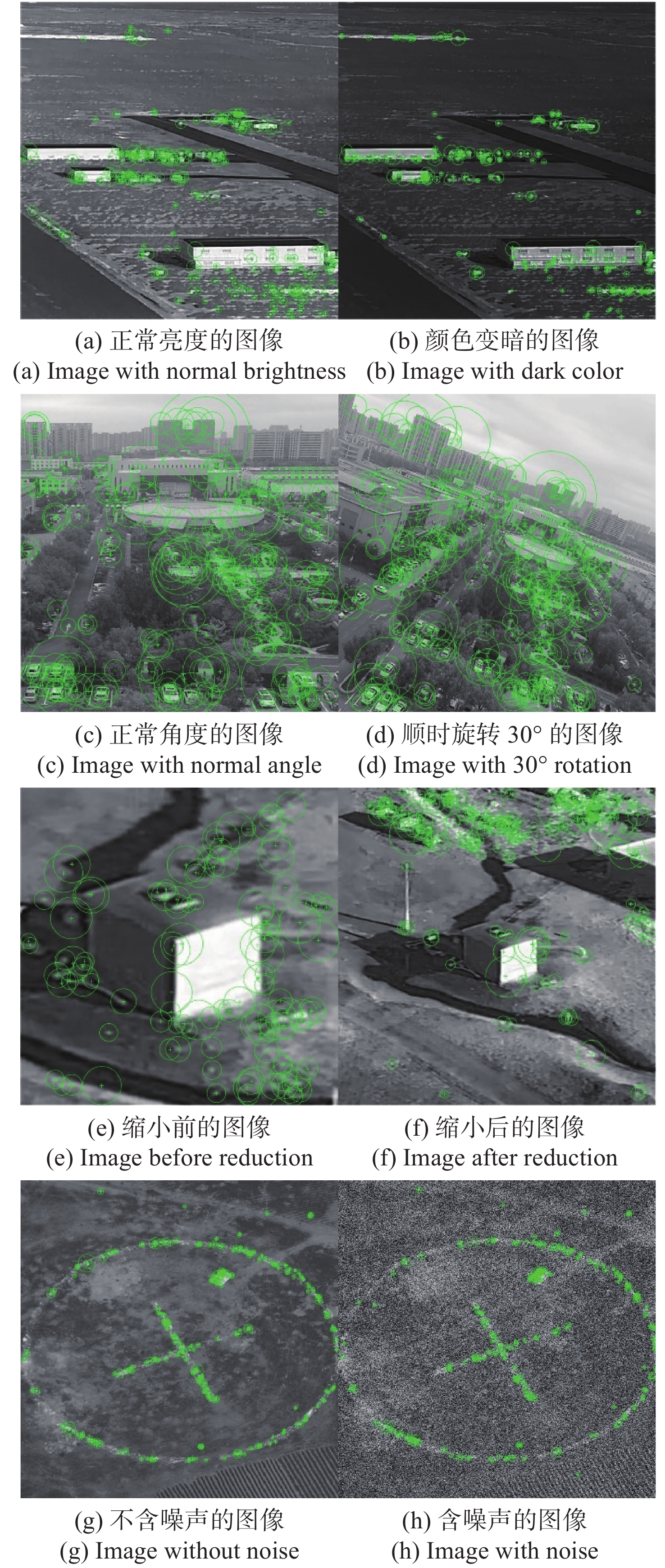
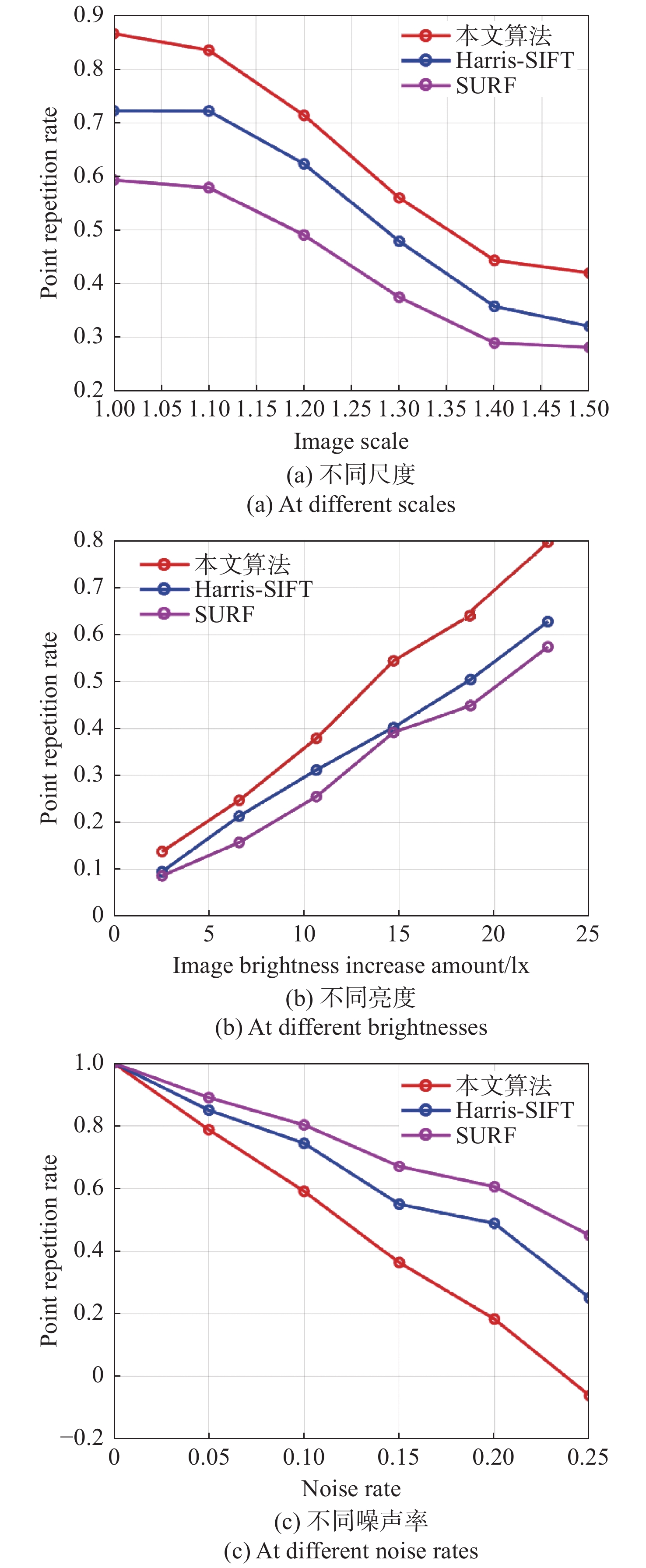
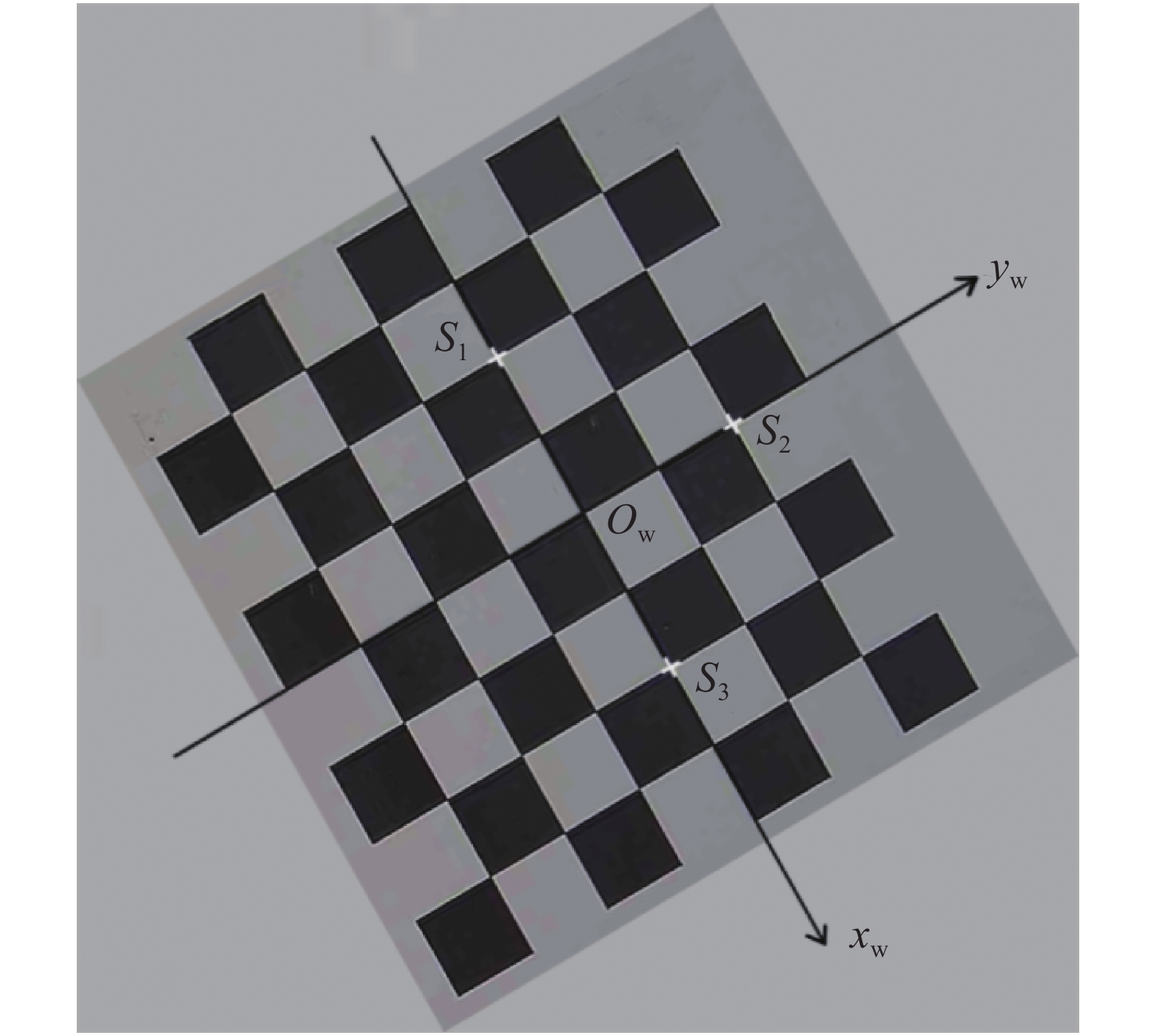
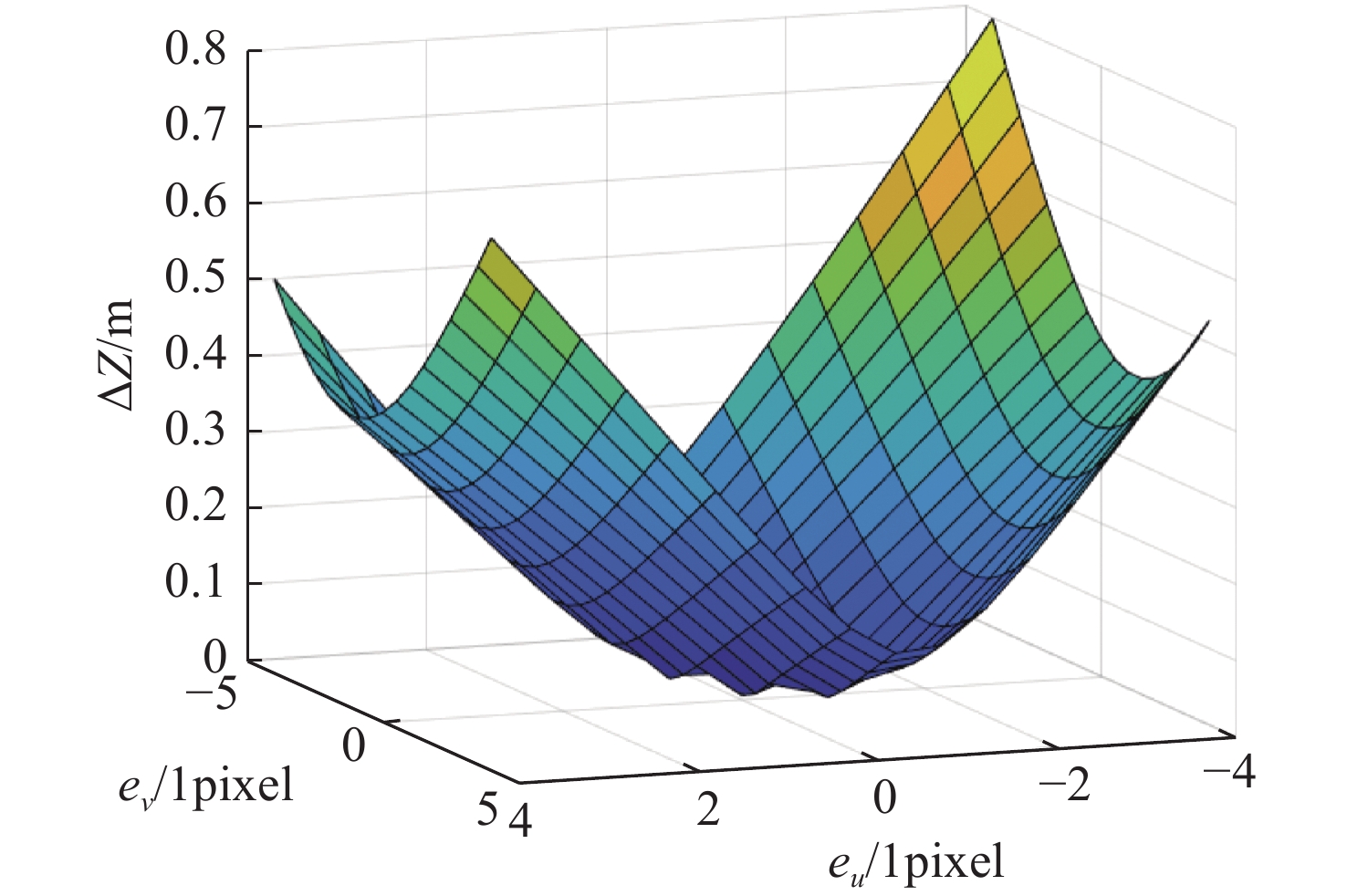
为了提升无人机机载光电吊舱在特殊工况条件下的自主侦察能力,本文结合实际工程项目研发了适用于机载光电吊舱的目标定位技术,并在嵌入式GPU(Graphics Processing Unit,型号为Jetson-TX2i)上实现了功能验证。首先,提出一种改进的SURF(Speeded Up Robust Features)算法与GPU加速数字图像处理方案,对不同焦距下获取的两幅图像进行实时特征检测与匹配。接着,利用几何交比不变性校正图像边缘畸变特征点的位置信息。最后,使用最小二乘法估计目标深度信息并结合四元数空间模型确定目标姿态信息,从而实现目标定位。实验结果表明,改进的SURF算法在特征匹配方面,精度和速度都优于经典的SURF算法。若角点特征位置误差控制在一个像素以内,深度误差不超过2%,方位角、俯仰角和滚转角的角度误差分别小于4°,5°和2°,这一误差满足机载光电吊舱的目标定位准确性需求。此外,处理一组(两帧)分辨率为1080P的图像,利用GPU加速可以将处理时间提升至74 ms,这一速度满足机载光电吊舱数据处理的实时性需求。






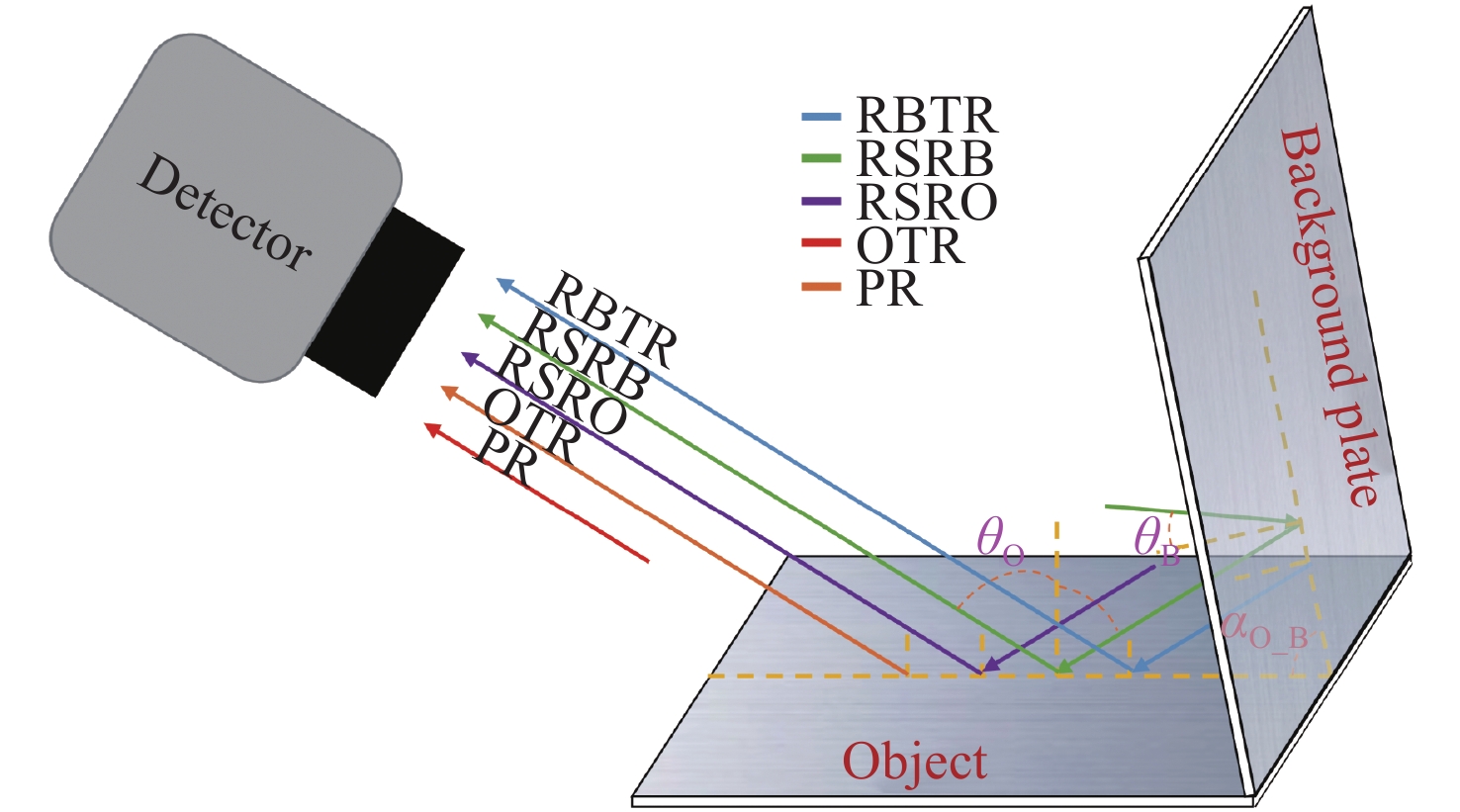
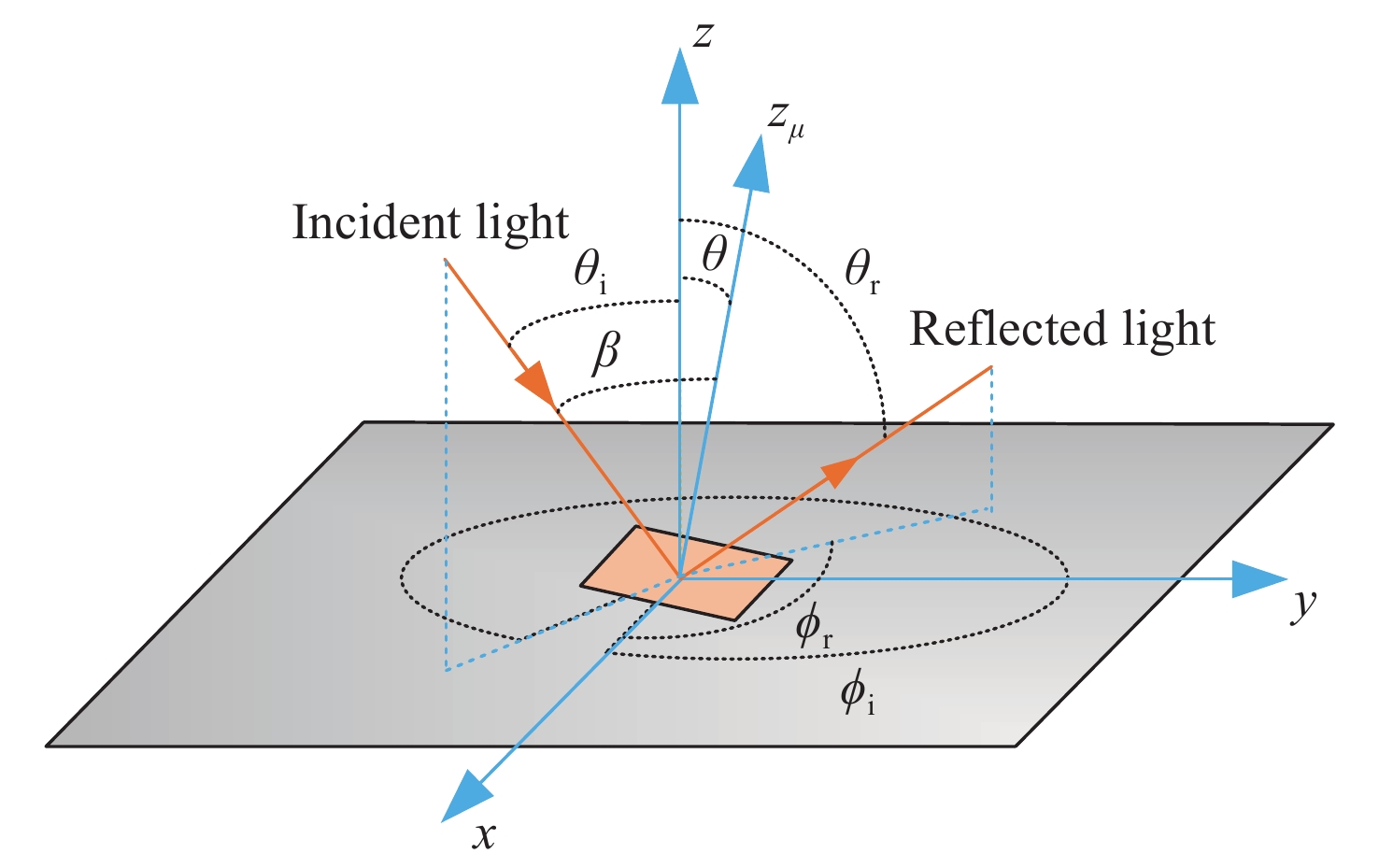
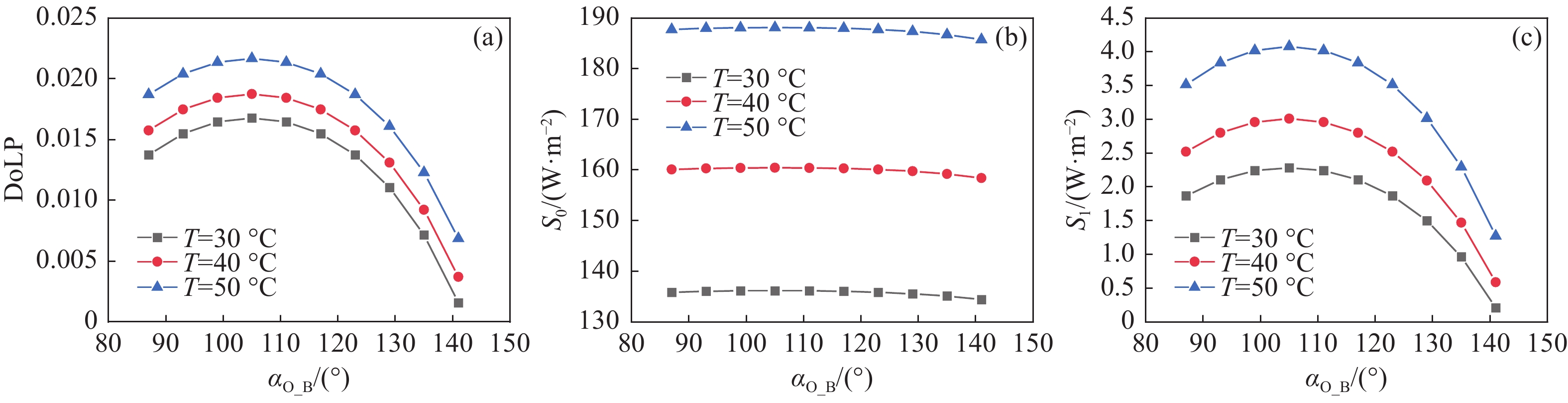
红外偏振成像技术具有探测距离远,目标识别率高等多种优势,但在复杂环境下目标偏振特性易受背景辐射影响,使得红外偏振设备的探测能力大幅降低。本文基于偏振双向反射分布函数,综合考虑目标和背景间的辐射耦合效应,建立了目标偏振度计算模型。对比研究了有强辐射背板和无强辐射背板两种情况下目标偏振度的变化情况,并针对陆基和机载探测等小角度探测情况,仿真研究了目标和背板的温度、夹角等参数对目标偏振度的影响规律。研究结果表明:目标和背板温度相同时,辐射耦合效应会显著降低目标的偏振度,但不会改变目标偏振度随温度升高而增大的趋势。当目标和背板温度为30 °C、40 °C和50 °C时,目标偏振度的最大值分别为无强辐射背板时的63.7%、44.9%和42.2%。可见温度越高,目标和背板间的辐射耦合效应越强,目标偏振度降低的比例越大。此外,辐射耦合效应的强弱不仅与温度有关,还与目标和背板的夹角有关。随着夹角的增大,目标偏振度先增大后减小,且在夹角约为105°处取得极大值。因此,辐射耦合效应会在一定程度上改变目标偏振度,从而影响红外偏振设备的探测能力。最后,通过搭建的长波红外偏振成像系统,对建立的目标偏振度计算模型进行了实验验证,实验结果与仿真分析结果基本一致。本文研究成果对提升陆基和机载红外偏振设备的探测和识别能力具有一定的指导意义。




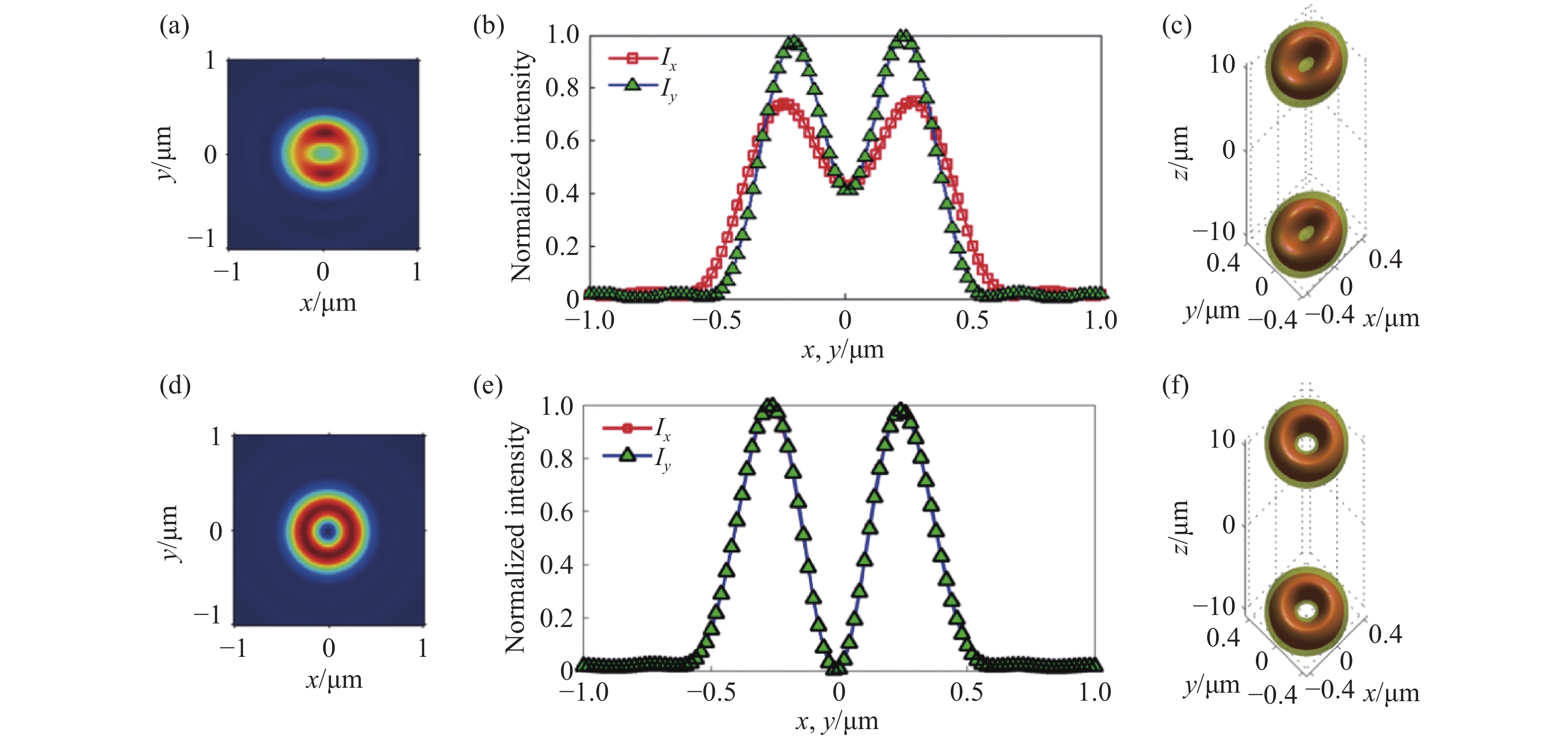
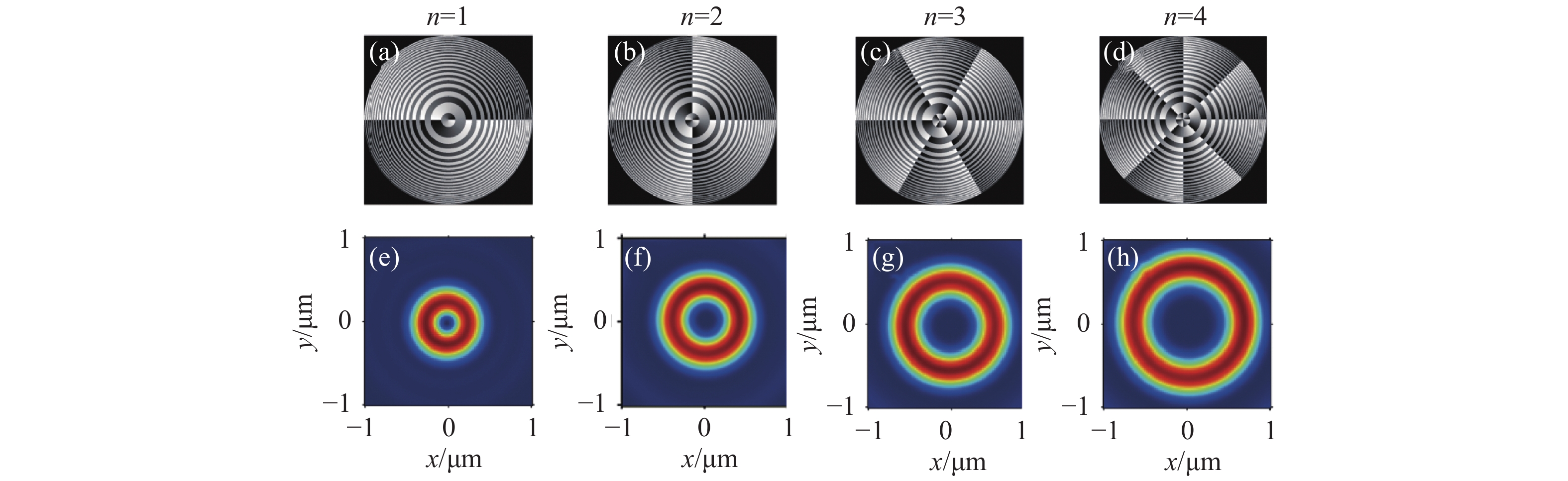
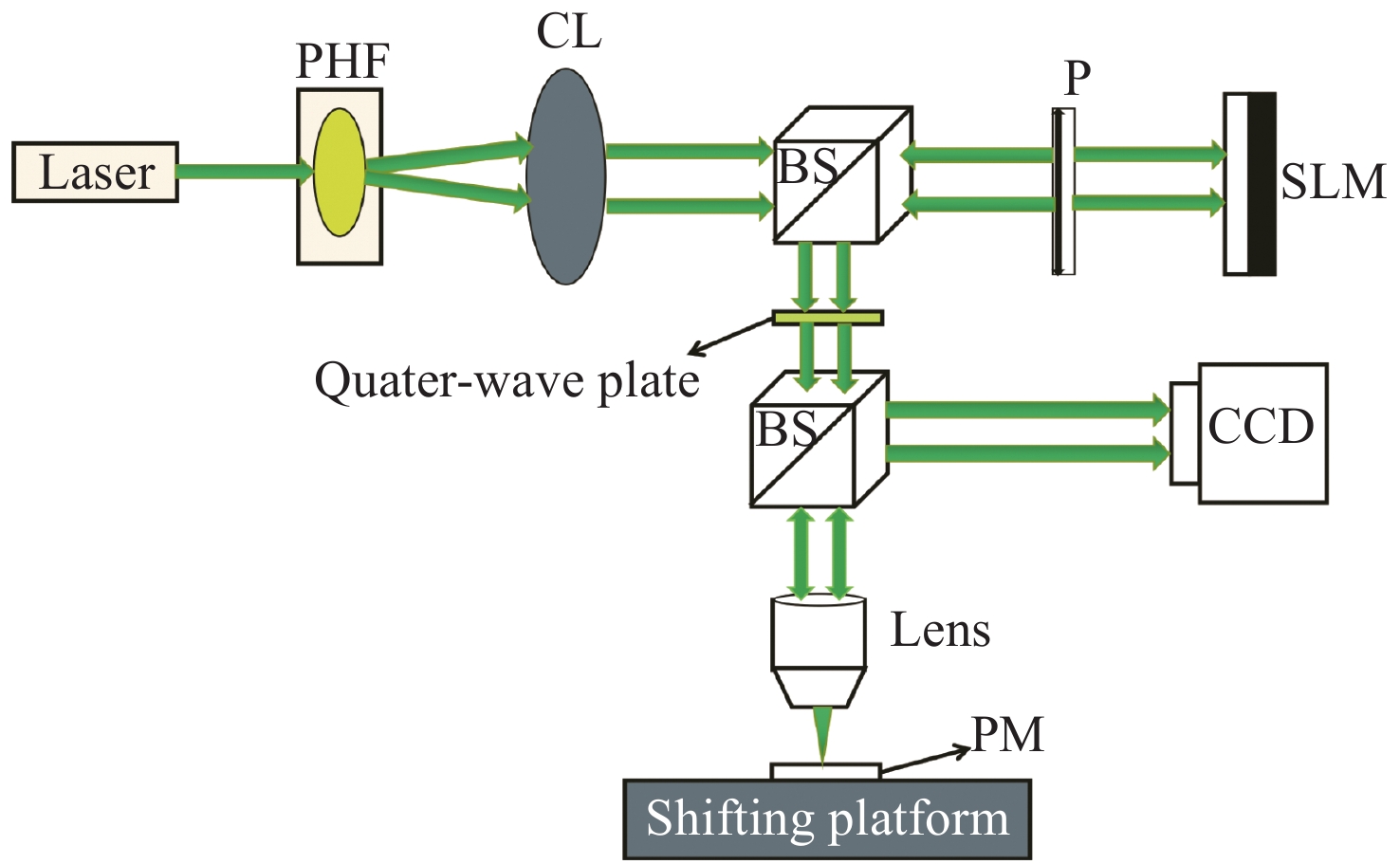
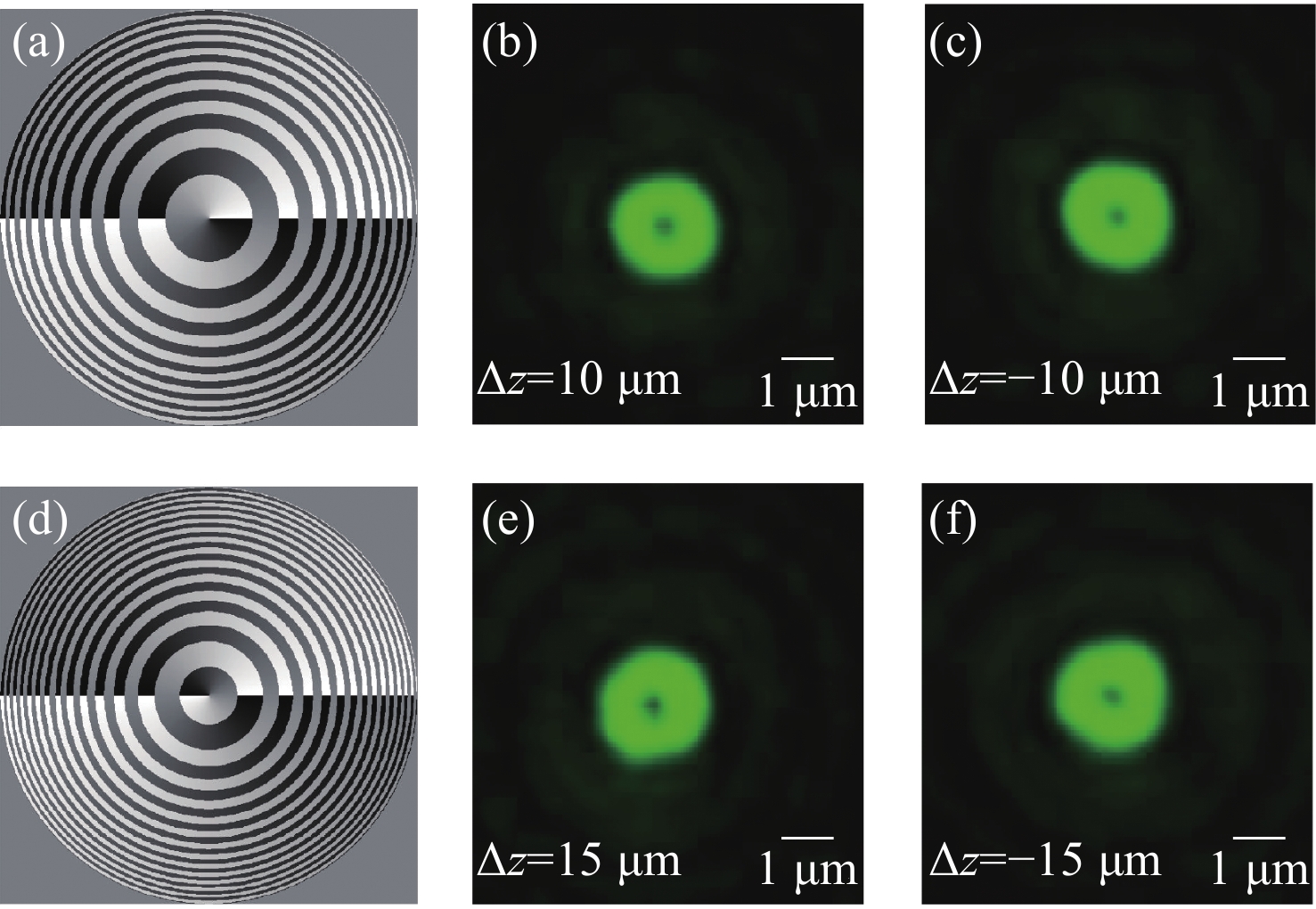
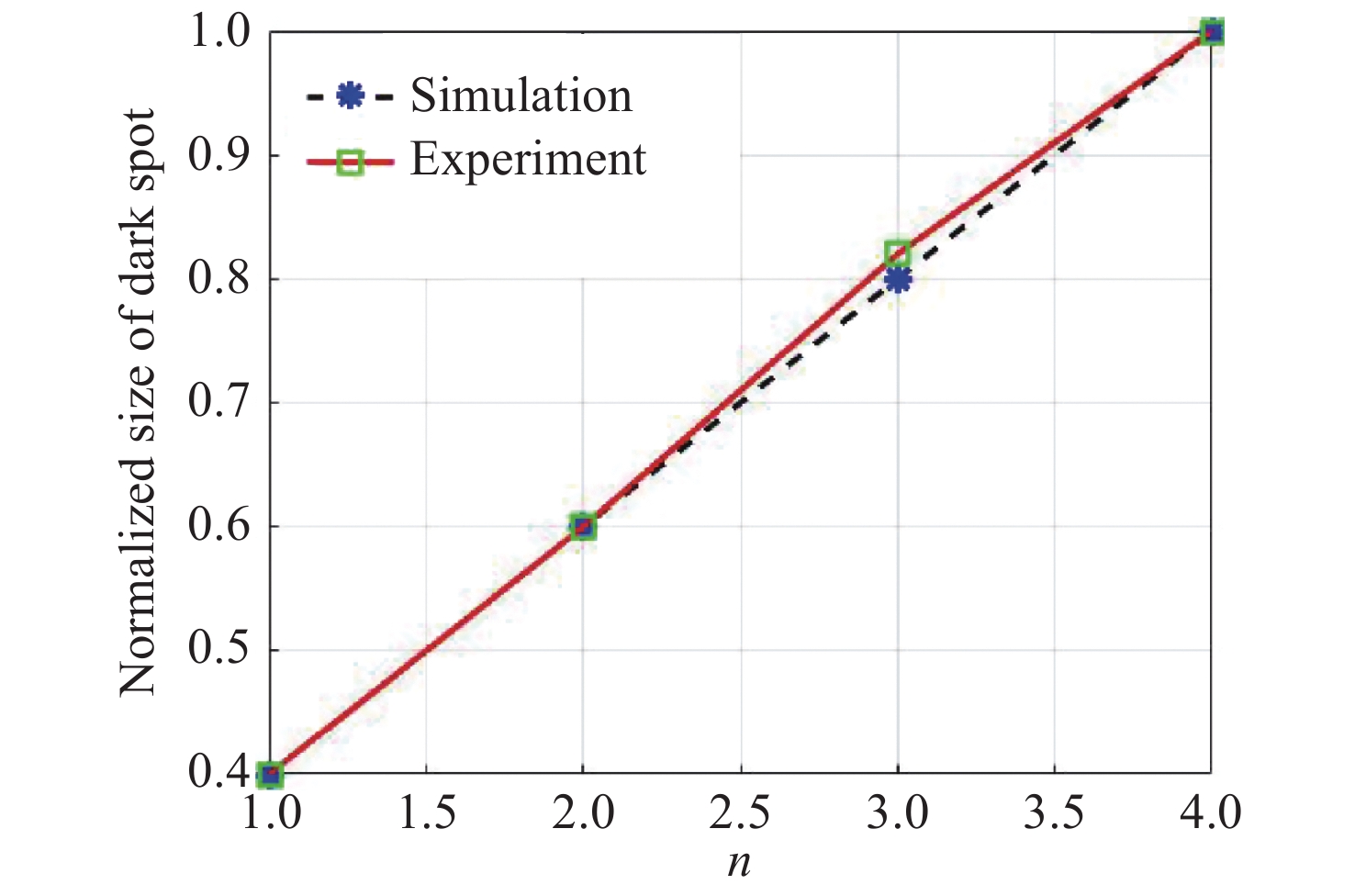
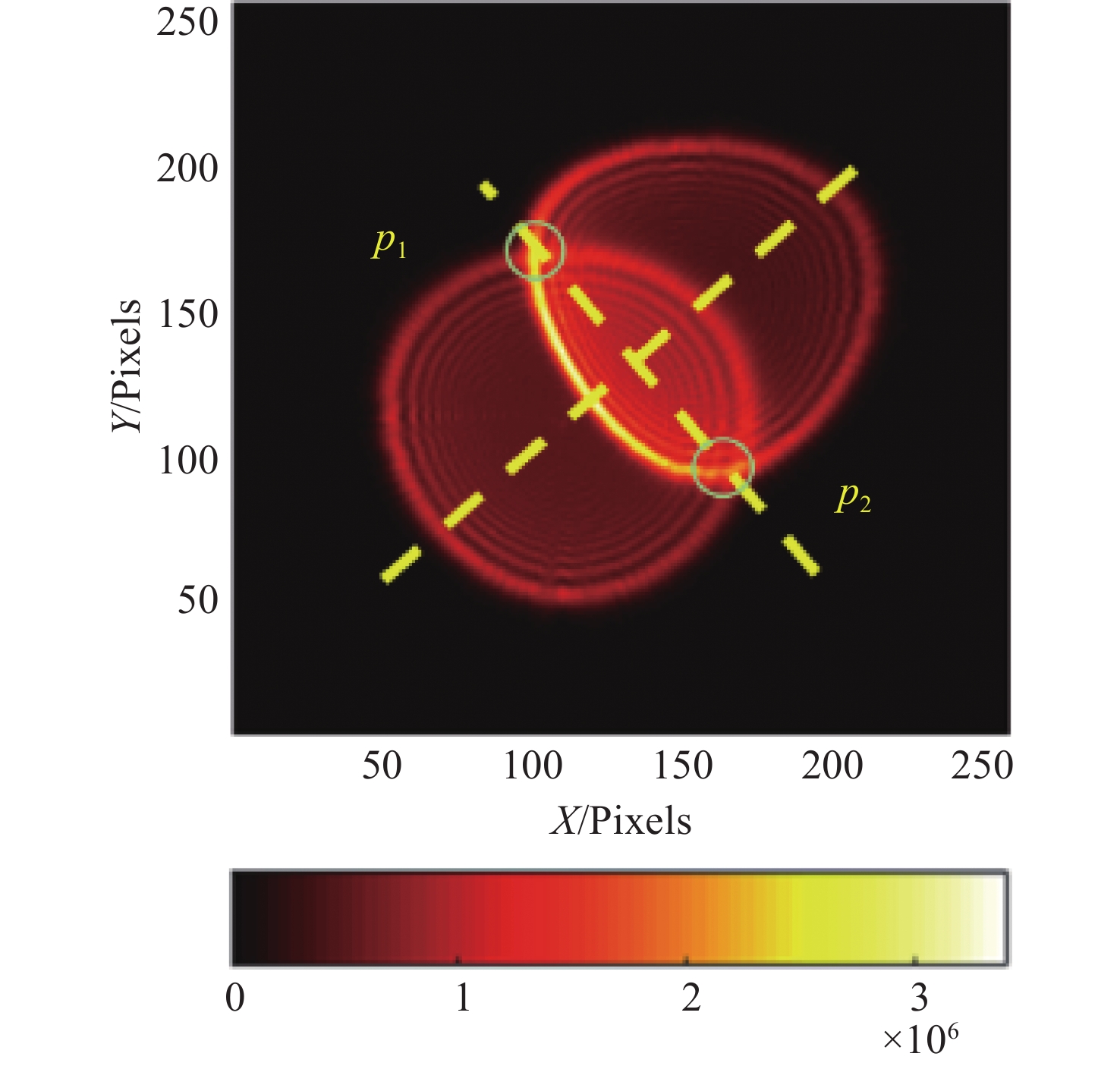
为了产生轴向双焦点中空环形光斑,基于矢量衍射积分得出的环带半径公式,设计产生了呈环带分布的轴向双焦点的螺旋相位,并研究了这种螺旋相位在高数值孔径物镜聚焦区域的光斑特性。首先,给出了线偏振以及圆偏振的涡旋光束在高数值孔径物镜聚焦条件下的积分表达式。然后,利用此积分表达式数值模拟了线偏振光与圆偏振光在不同轴向偏移距离及螺旋拓扑荷值时的聚焦光场分布。最后,将轴向双焦点螺旋相位加载到纯相位空间光调制器上,分别对圆偏振光与线偏振光入射进行实验研究。线偏振光入射时,实验产生了拓扑荷为1且轴向距离为±10 μm、±15 μm的双聚焦环形光斑;圆偏振光入射时,产生了轴向距离为±20 μm且拓扑荷为1到4时的双聚焦环形光斑。数值模拟与实验结果表明:圆偏振光与线偏振光经此螺旋相位调制后,在紧聚焦区域可产生轴向距离与暗斑大小可调的中空环形双焦点;圆偏振光较线偏振光产生的空心光斑光强分布更均匀,呈圆对称分布。此轴向双焦点螺旋相位有望在光学微操控、双光束超分辨纳米光刻以及STED显微成像方面获得一定的应用。


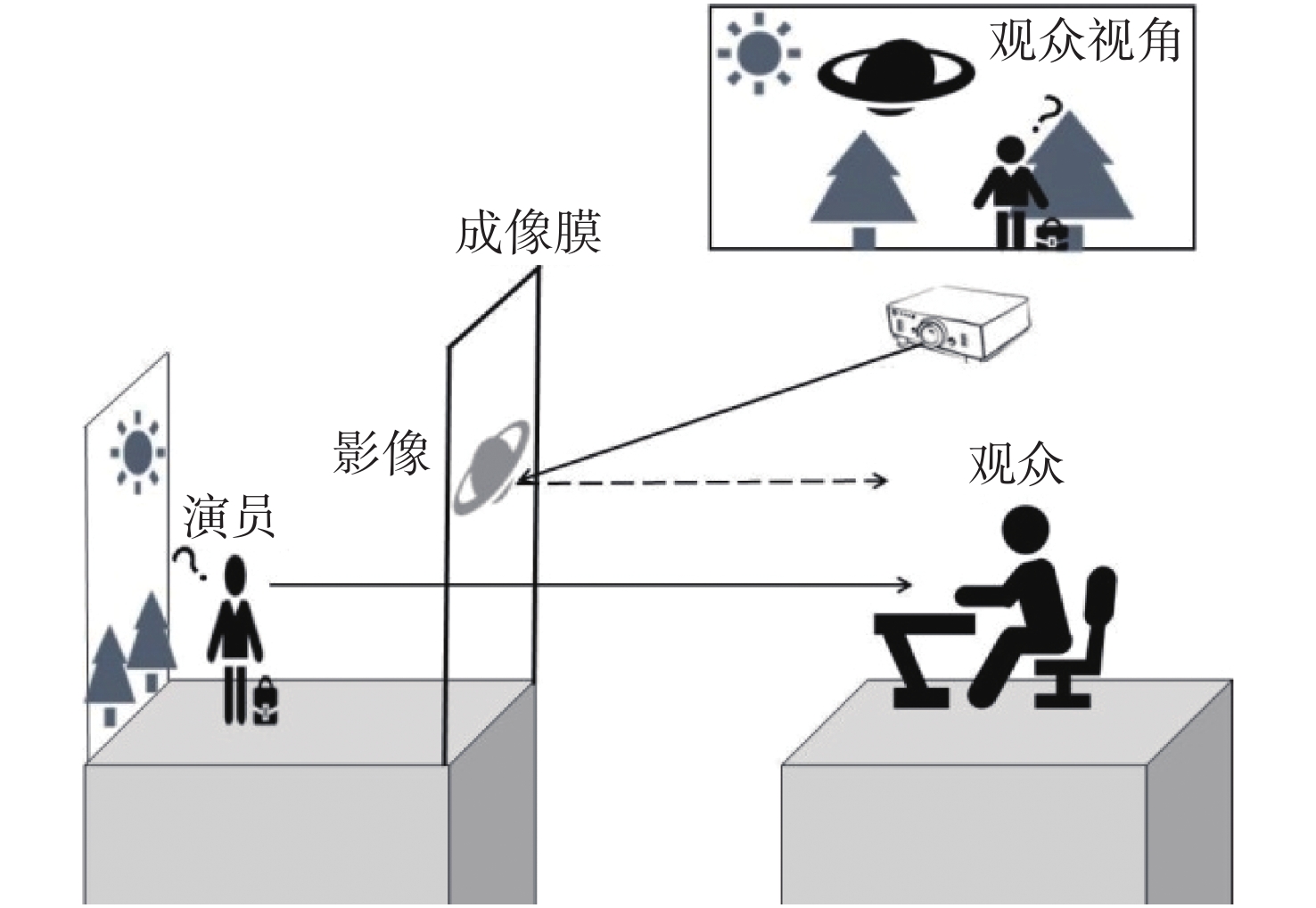
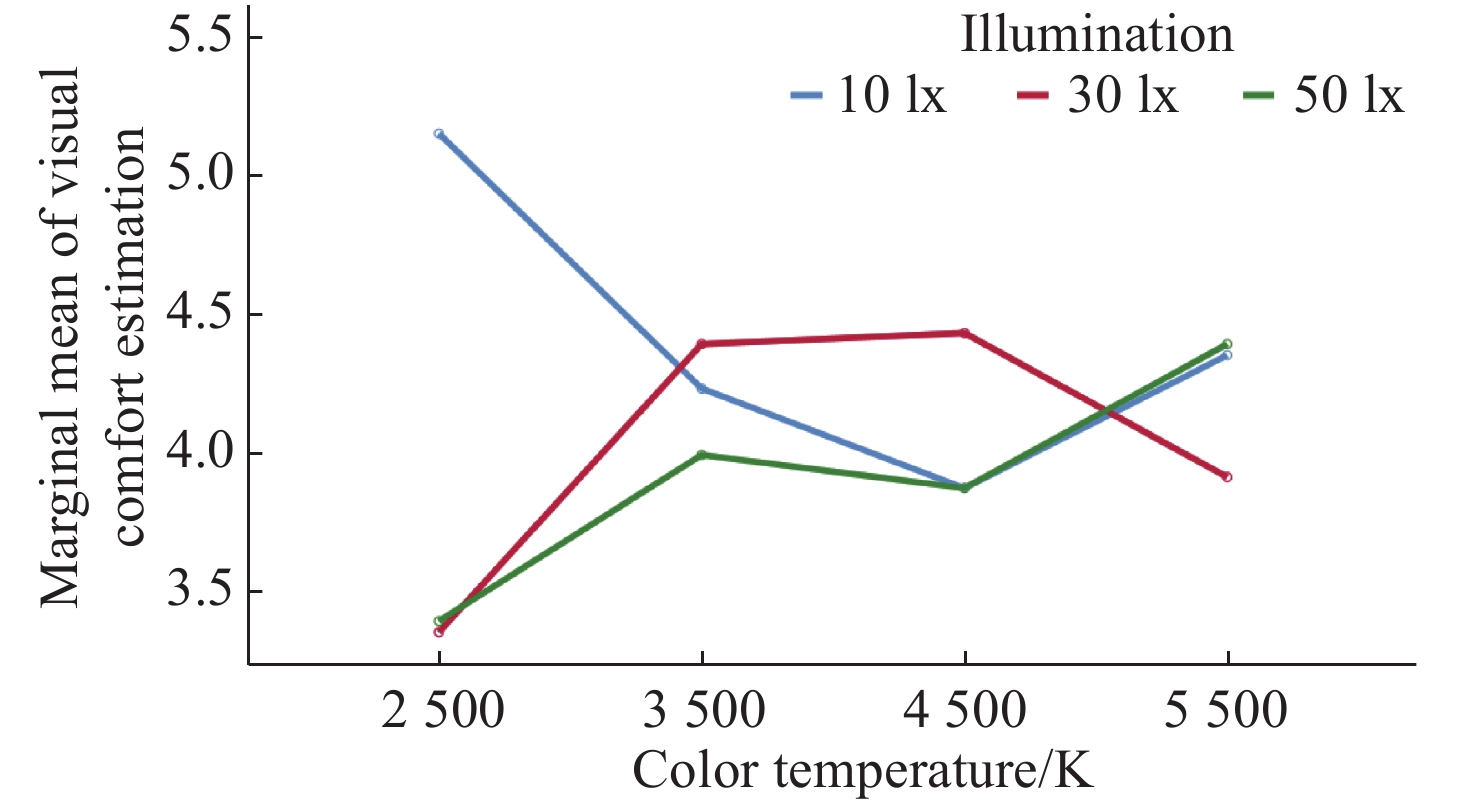
随着数字化展示技术的不断发展,展陈方式也发生了改变。佩伯尔幻象的展陈空间的光环境在保证效果的同时,还具有较好的视觉舒适性。为探寻光环境对佩伯尔幻象展示效果的影响,搭建了虚拟成像展示空间,研究了影响成像效果的因素与趋势。研究设定12组不同照度和色温组合的LED光照参数,选取25名观察者进行心理物理学实验,以分析不同光环境对佩伯尔幻象展陈效果的影响。通过实验可知:色温对幻象中的色彩真实度、细节表现力、立体感表现力评价影响较低;照度对色彩真实度评价未产生显著影响,对它的细节表现力、立体感表现力具有显著性影响,在色温为3500 K,照度为10 lx的光环境下,展示效果中的细节表现力、立体感表现力相对较高,在色温为2500 K、照度为10 lx时视觉舒适度较好。




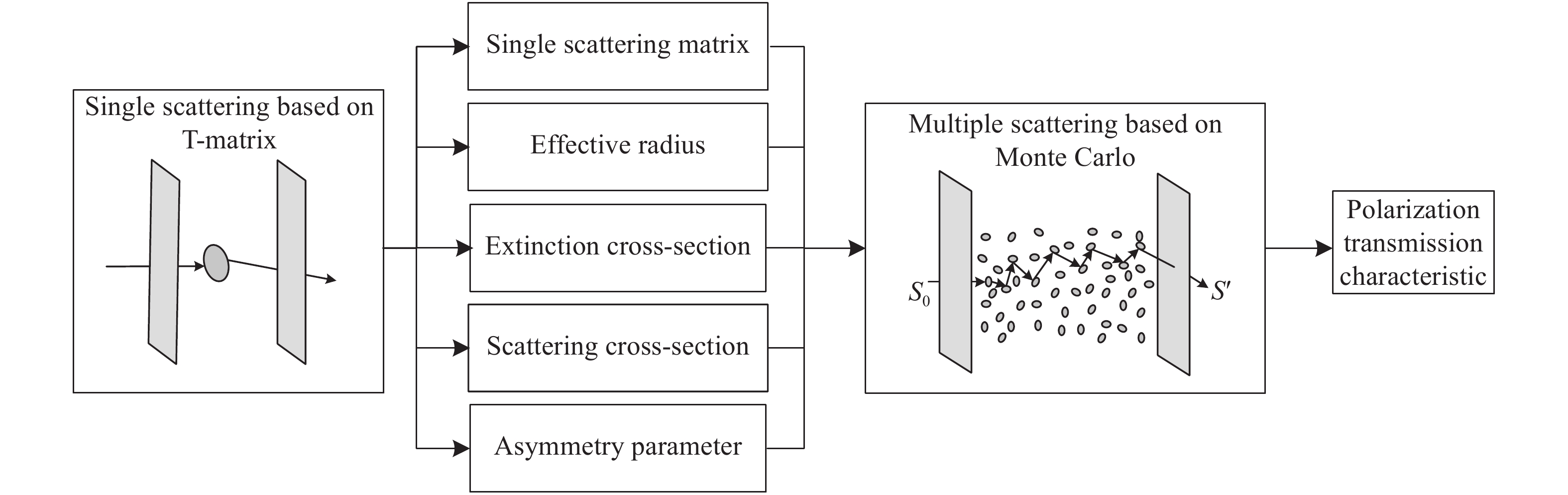
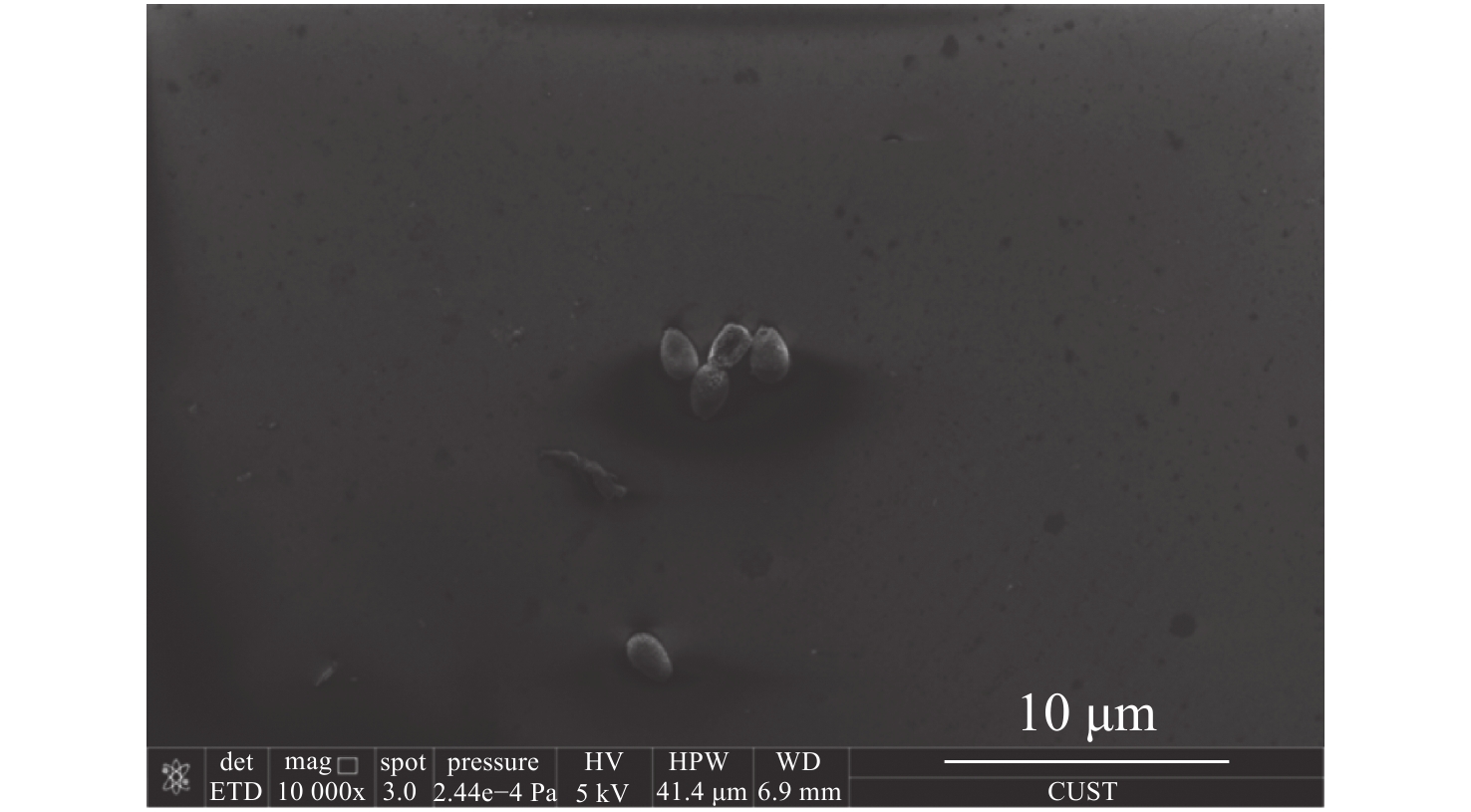
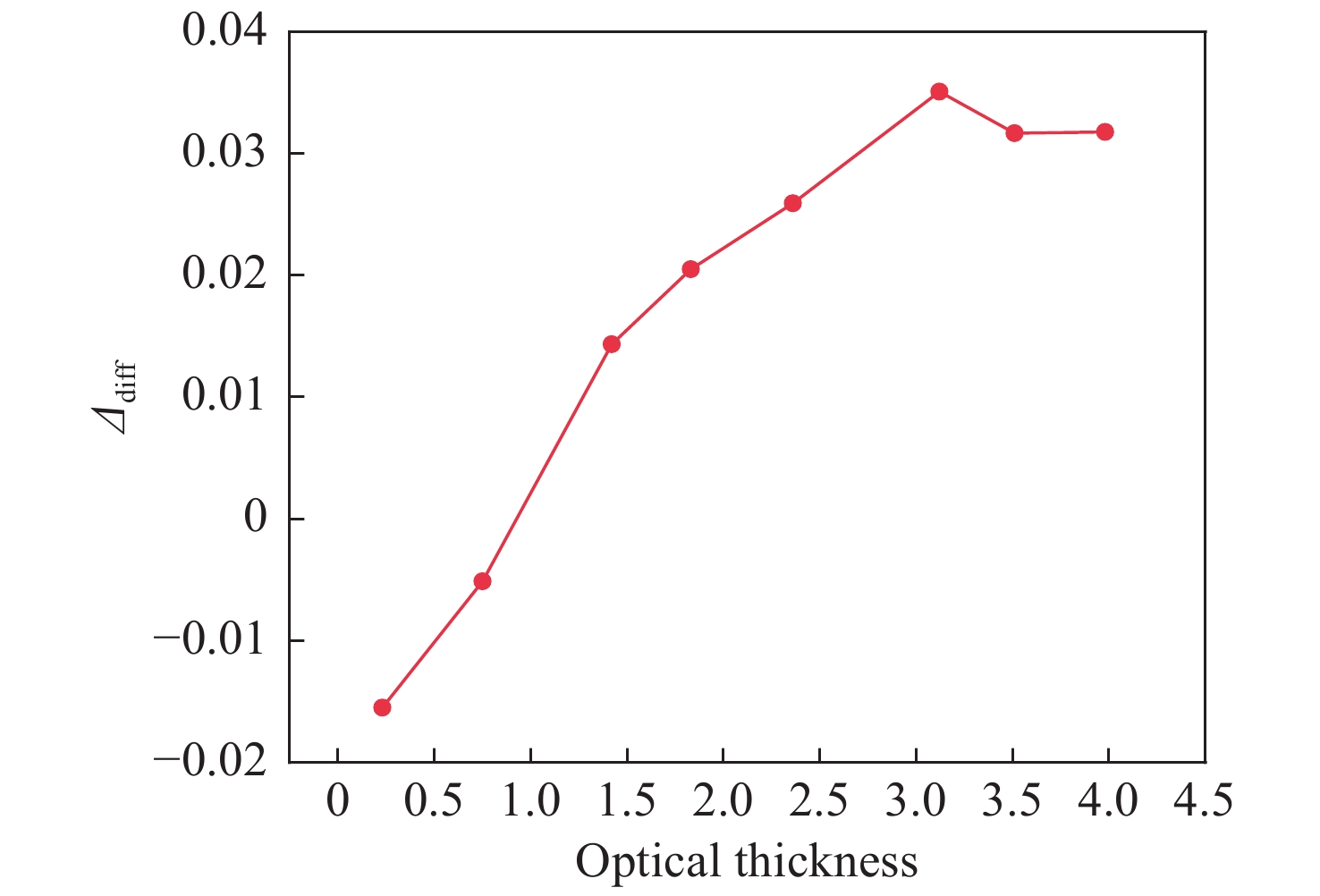
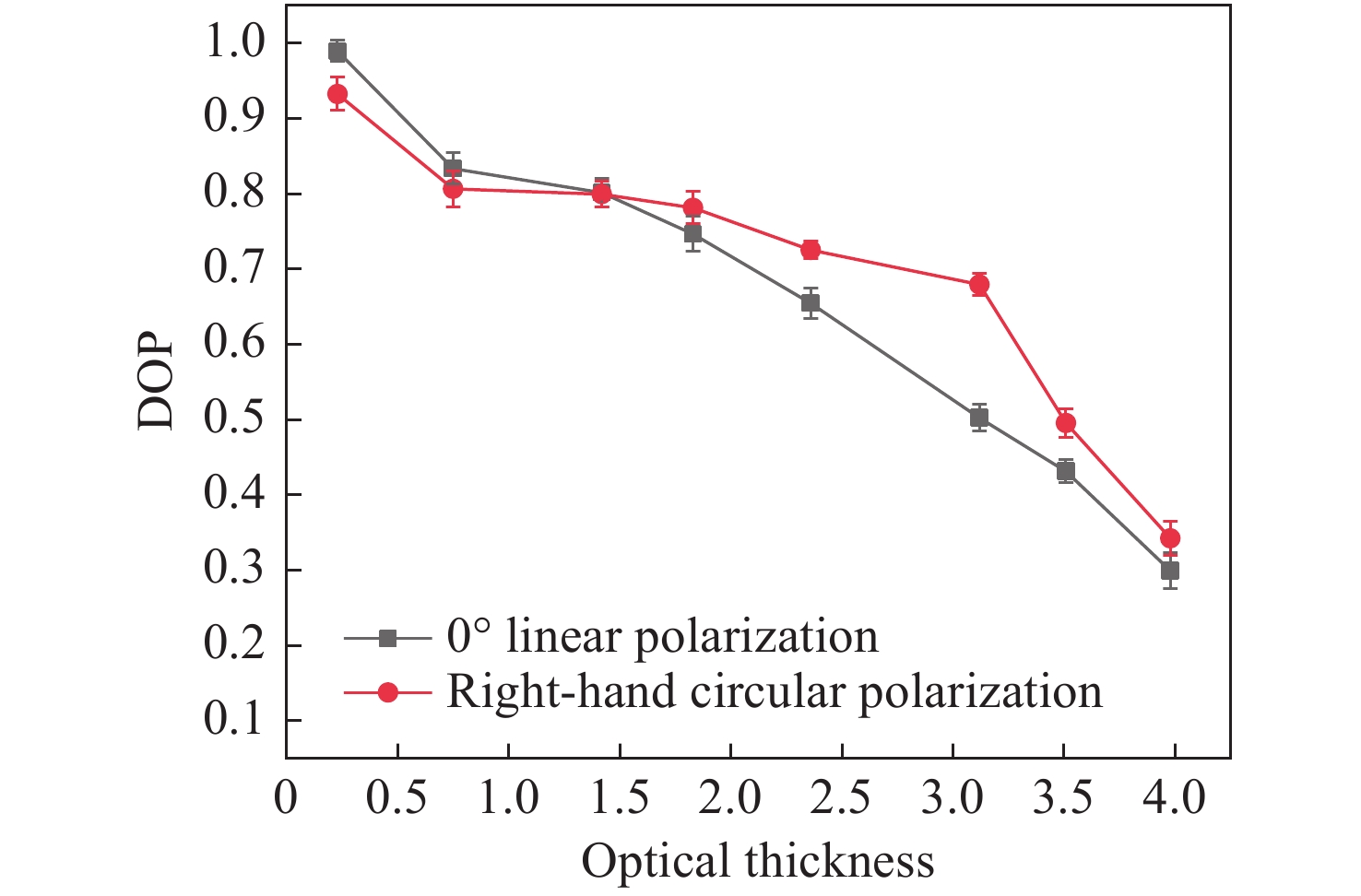
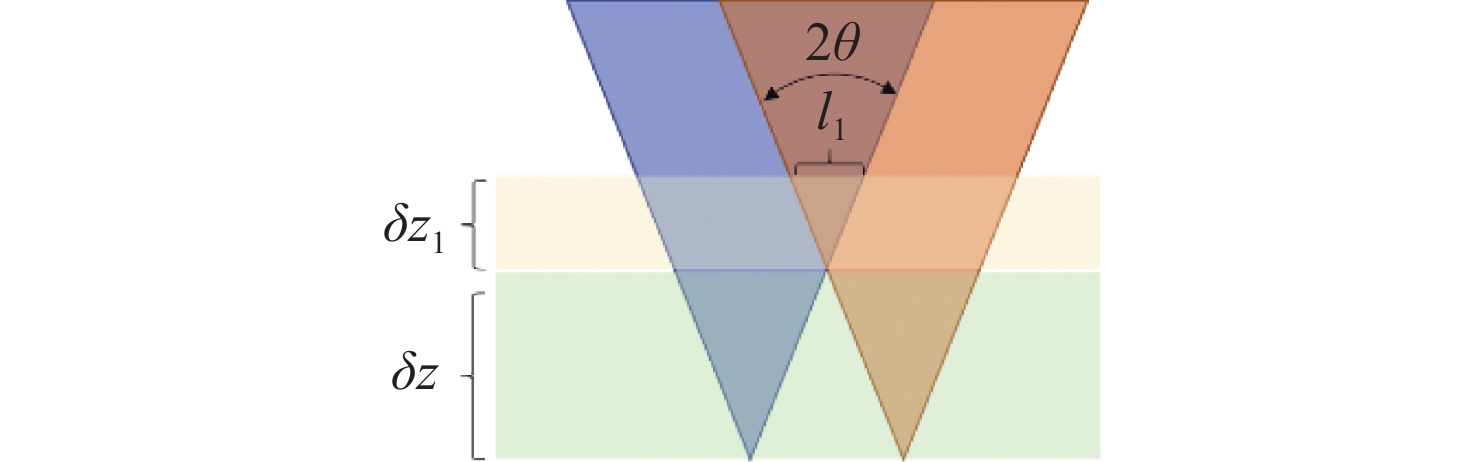
为了研究偏振光在椭球细粒子中多次散射的传输特性,建立了以黑碳气溶胶粒子为对象的仿真与实验验证系统。采用T矩阵和蒙特卡罗相结合的方法,对偏振光经随机取向椭球细粒子多次散射后的偏振传输特性进行仿真研究,建立半实物模拟测试平台对仿真方法进行验证,采用延长灵芝孢子燃烧时间的方式制备椭球细粒子,分别由马尔文粒度仪和光功率计测试椭球细粒子的尺寸分布和光学厚度,建立实验与仿真间的联系,验证了仿真结果的正确性。结果表明:随着黑碳椭球细粒子浓度的增加,水平、垂直、+45°线偏光和右旋圆偏光的偏振度都随之下降,且3种线偏振光的保偏性基本一致;随着浓度的增大,圆偏振光的保偏性逐渐优于线偏振光,且两者保偏性差距越来越大,在光学厚度为3.12时达到最大值,当光学厚度大于3.12时,圆偏光和线偏光的偏振度差值趋于稳定。经计算,仿真与实验结果符合度优于70.84%。本研究结果可扩展偏振探测的适用范围,为非球形颗粒物环境下偏振探测研究提供理论支撑。



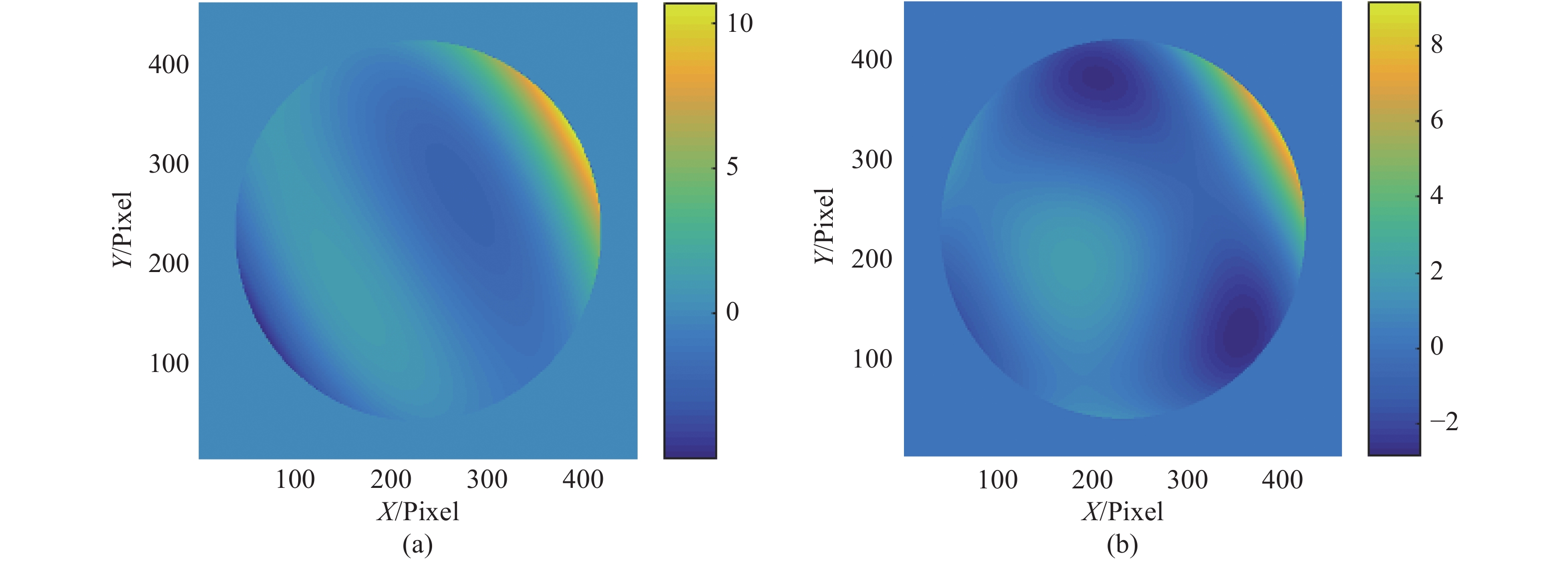
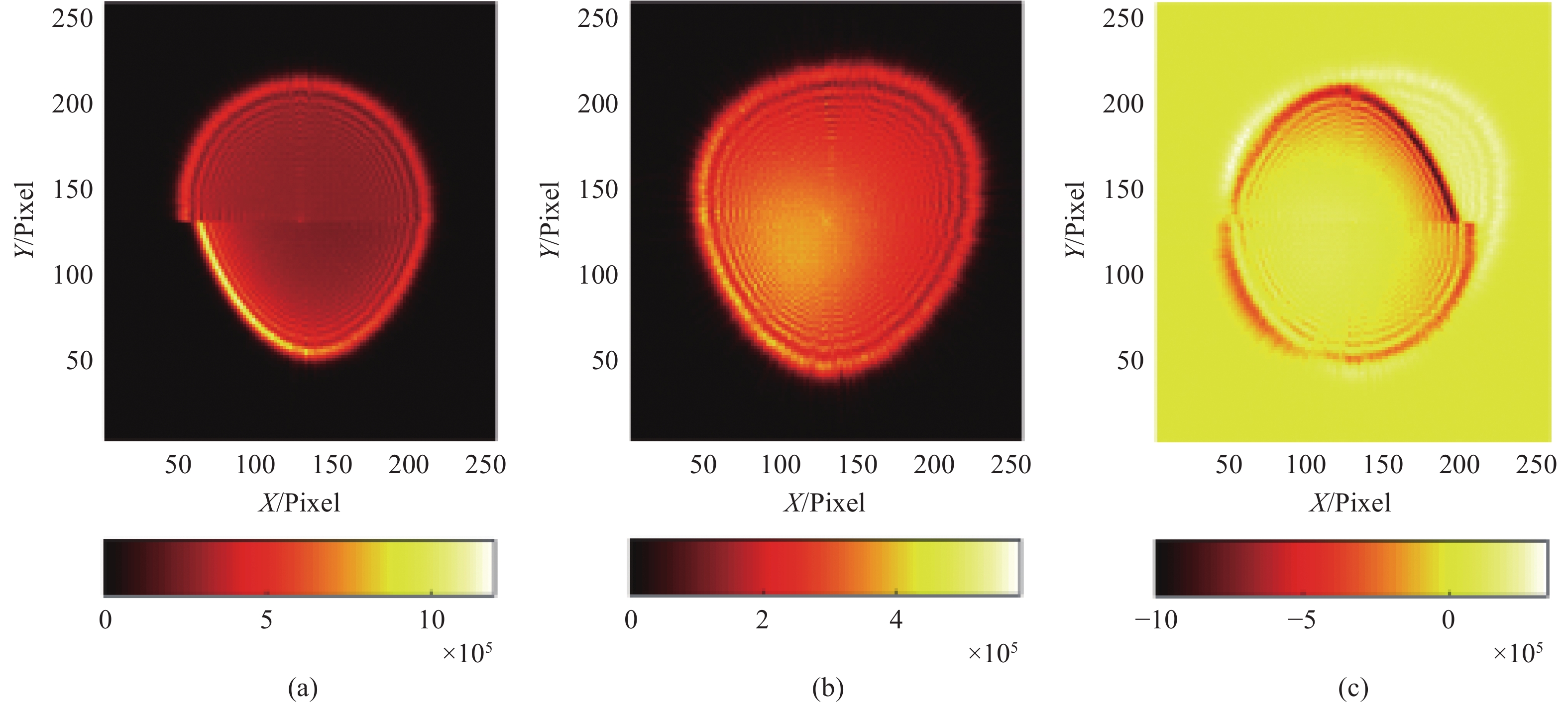
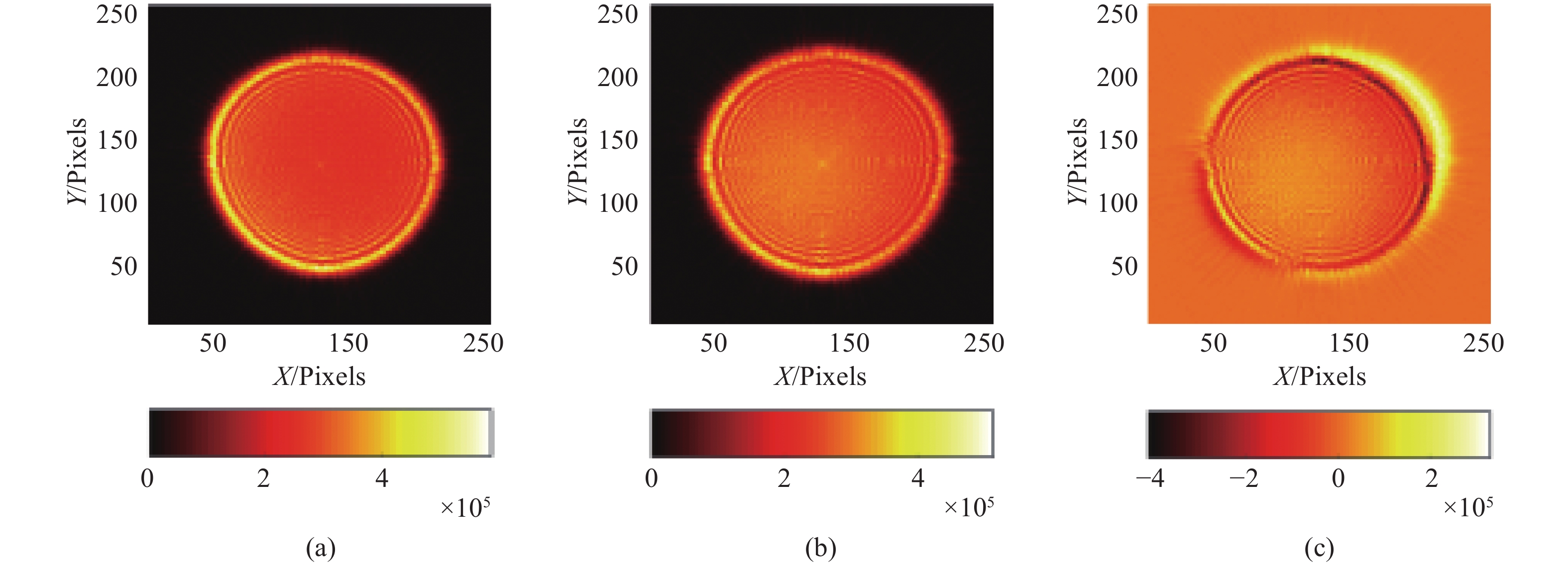
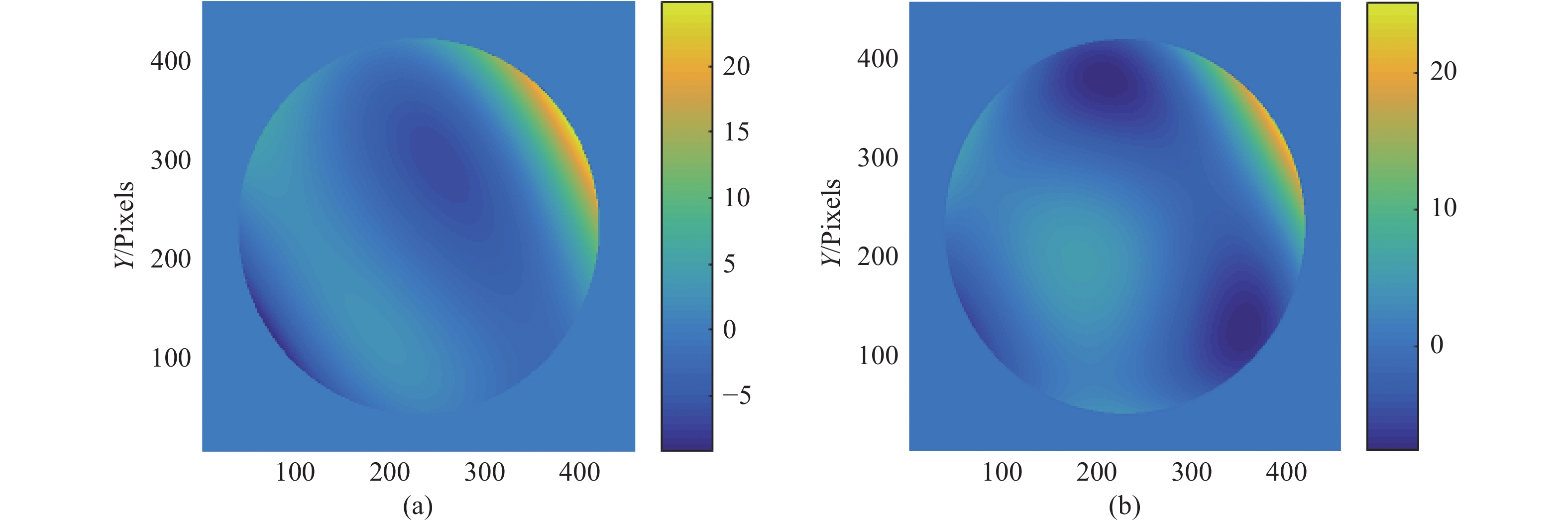
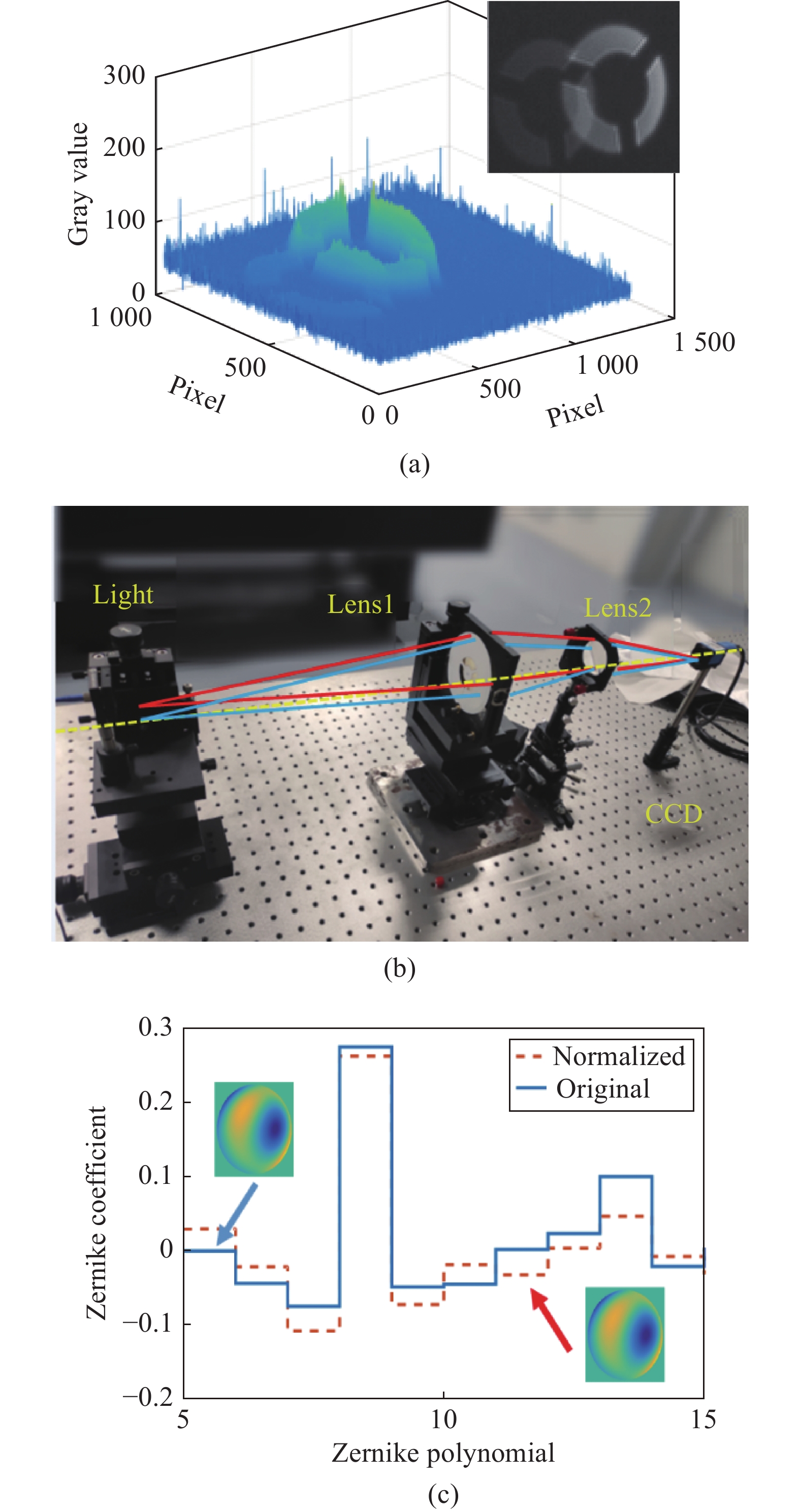
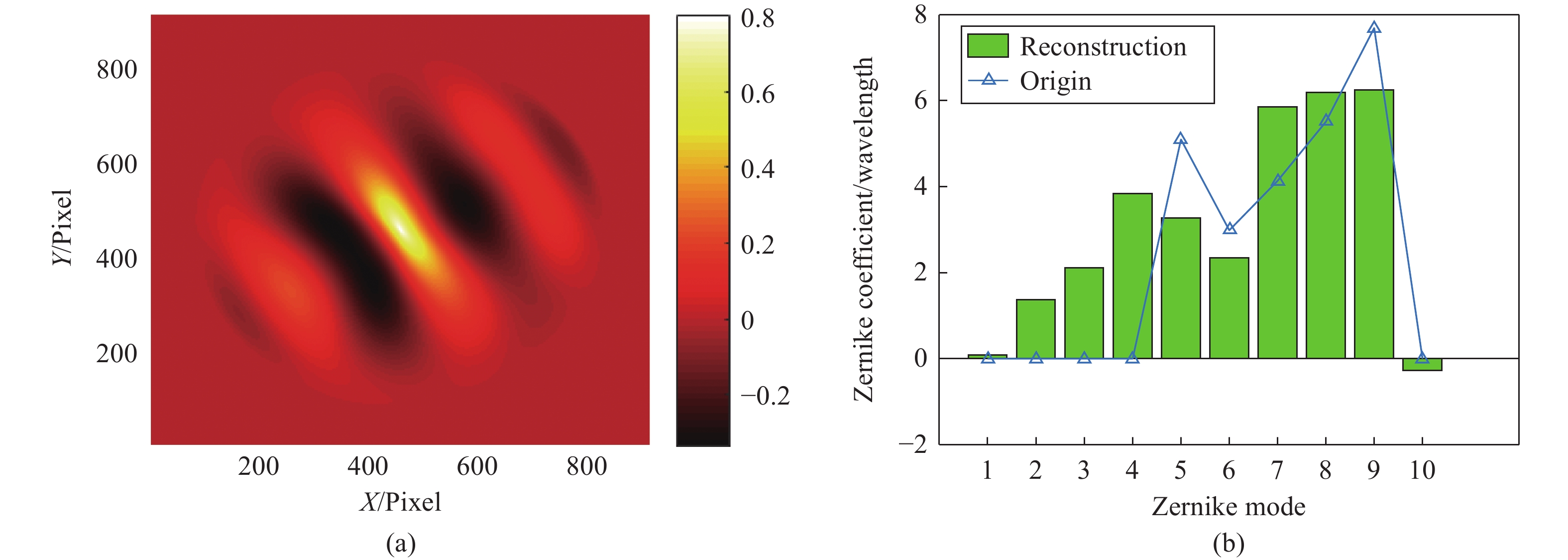
大口径巡天望远镜需要基于波前传感系统的反馈,进行主动光学闭环校正,以更好地发挥其极限探测能力。本文面向大口径巡天望远镜波前传感过程中,离焦星点像重合所导致的导星数量下降的问题,首先针对分区域曲率传感的基本理论表达进行了推导,之后,通过建立联合仿真模型,利用光学设计软件与数值计算软件之间的通讯交互,对分区域曲率传感的过程进行了仿真分析。最后,通过搭建桌面实验,分别就单目标与多目标的曲率传感进行了交叉比对,验证了算法的正确性。针对标准波前,本文所提出的方法与单导星曲率传感相比,误差为0.02个工作波长(RMS),误差在10%以内,可在传统主动光学技术的基础上,通过扩展可用导星,提升探测信噪比与采样速度,有效提升主动光学系统校正能力。


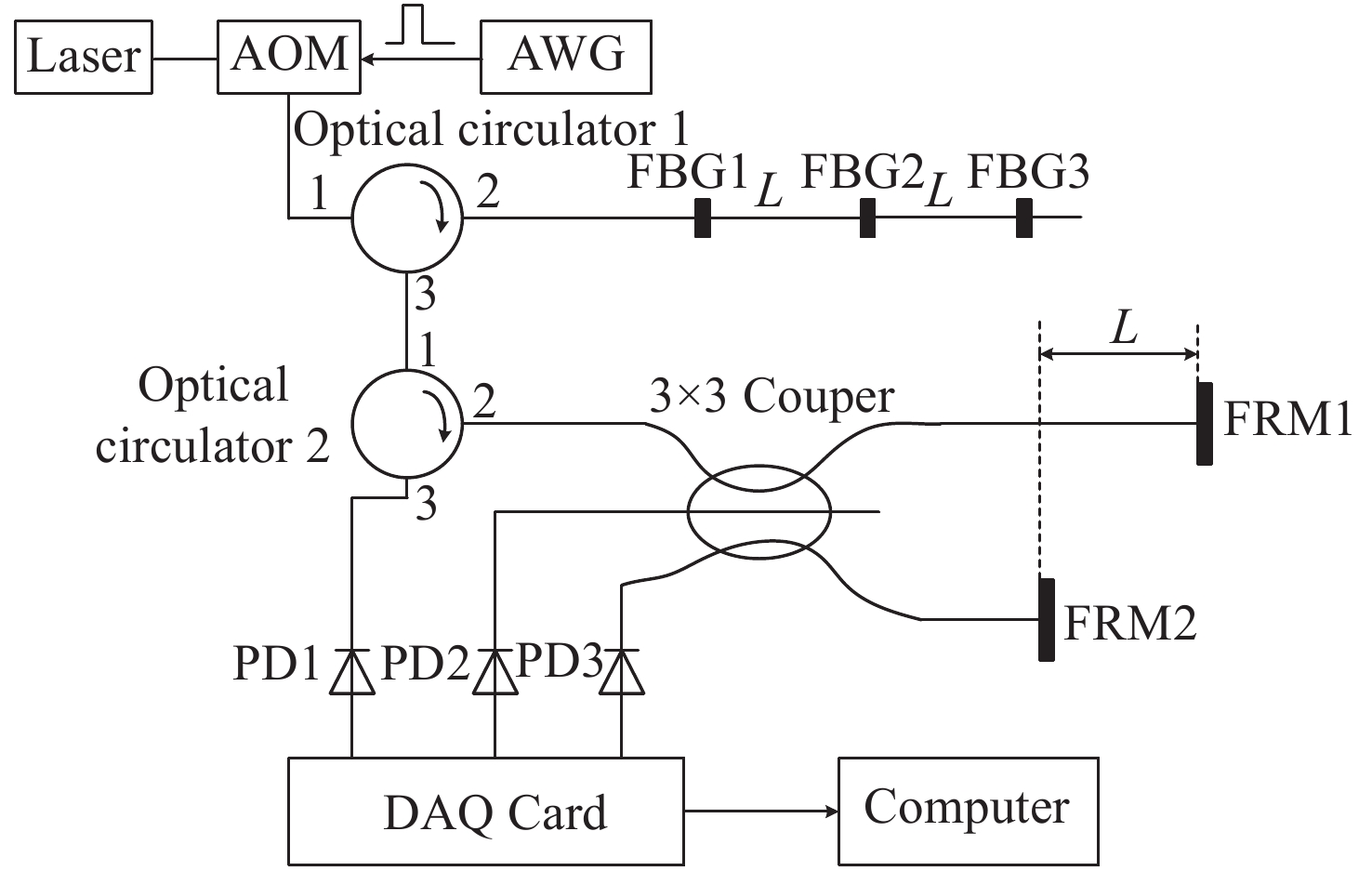
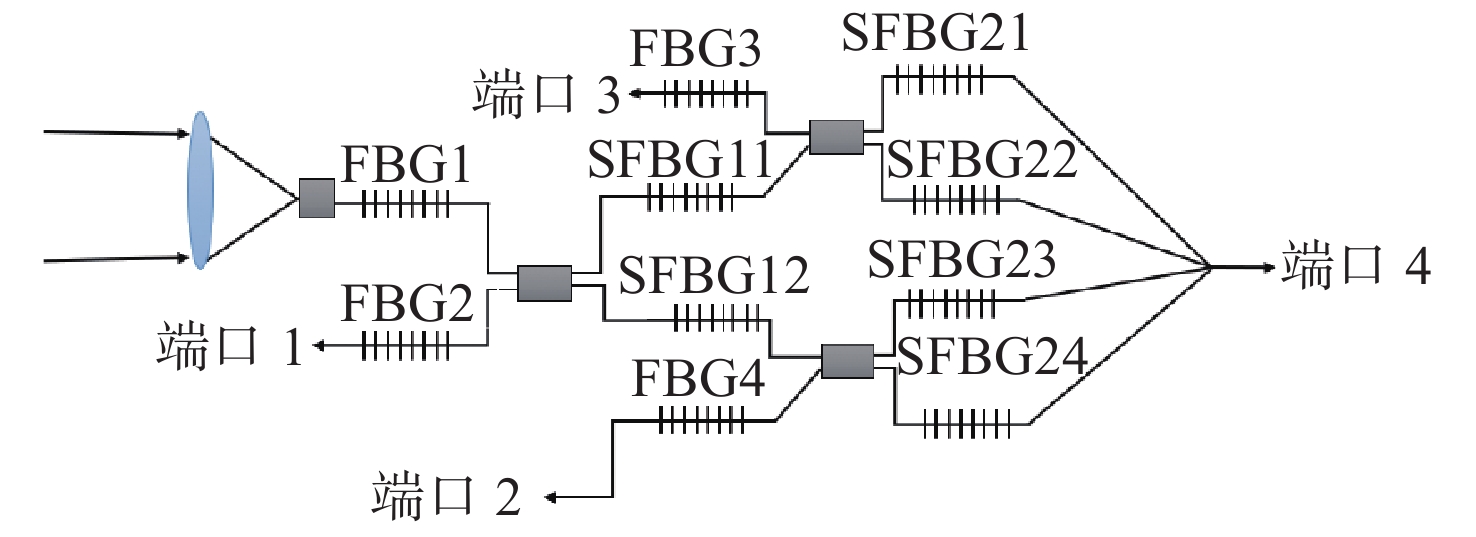
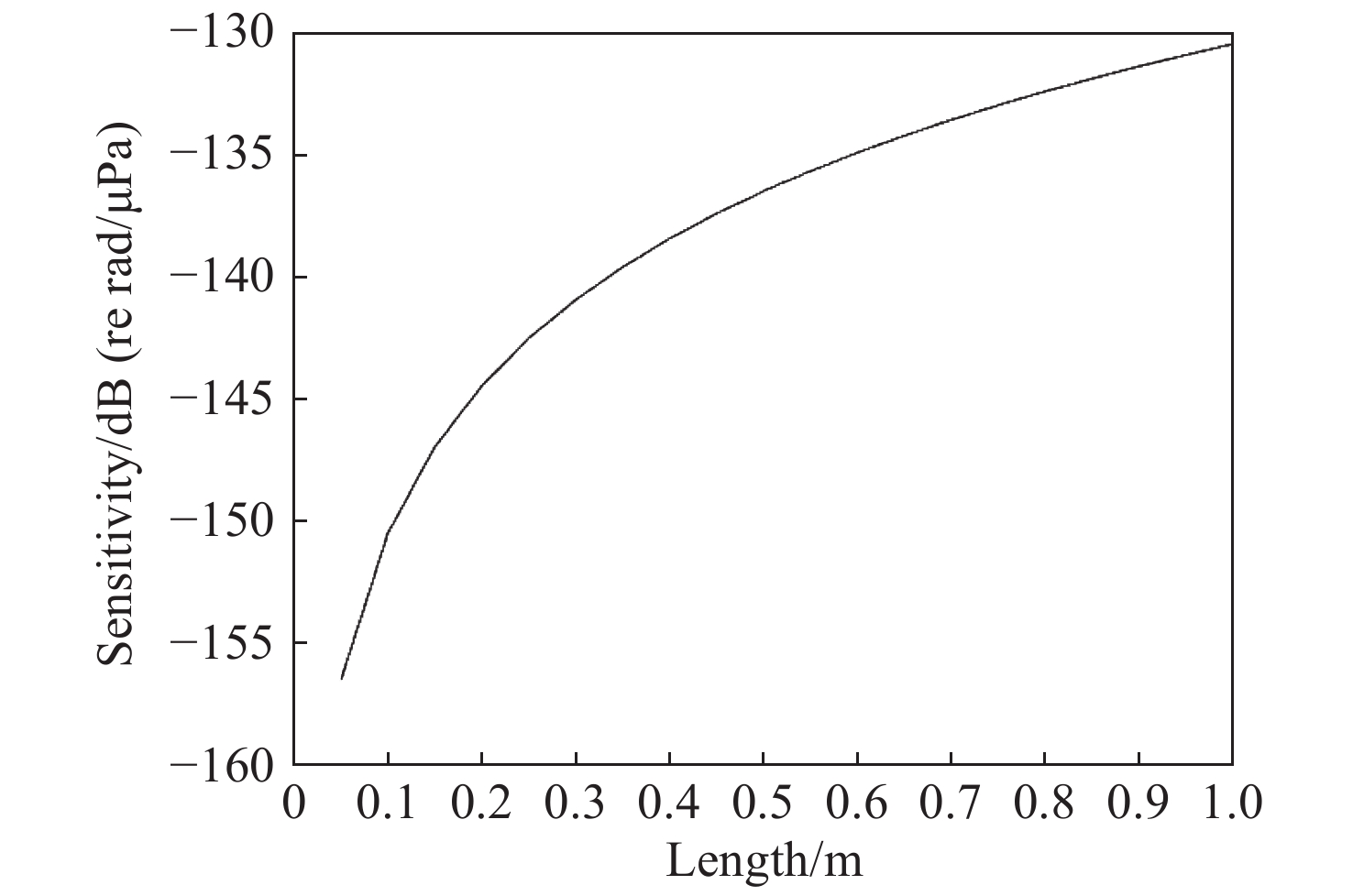
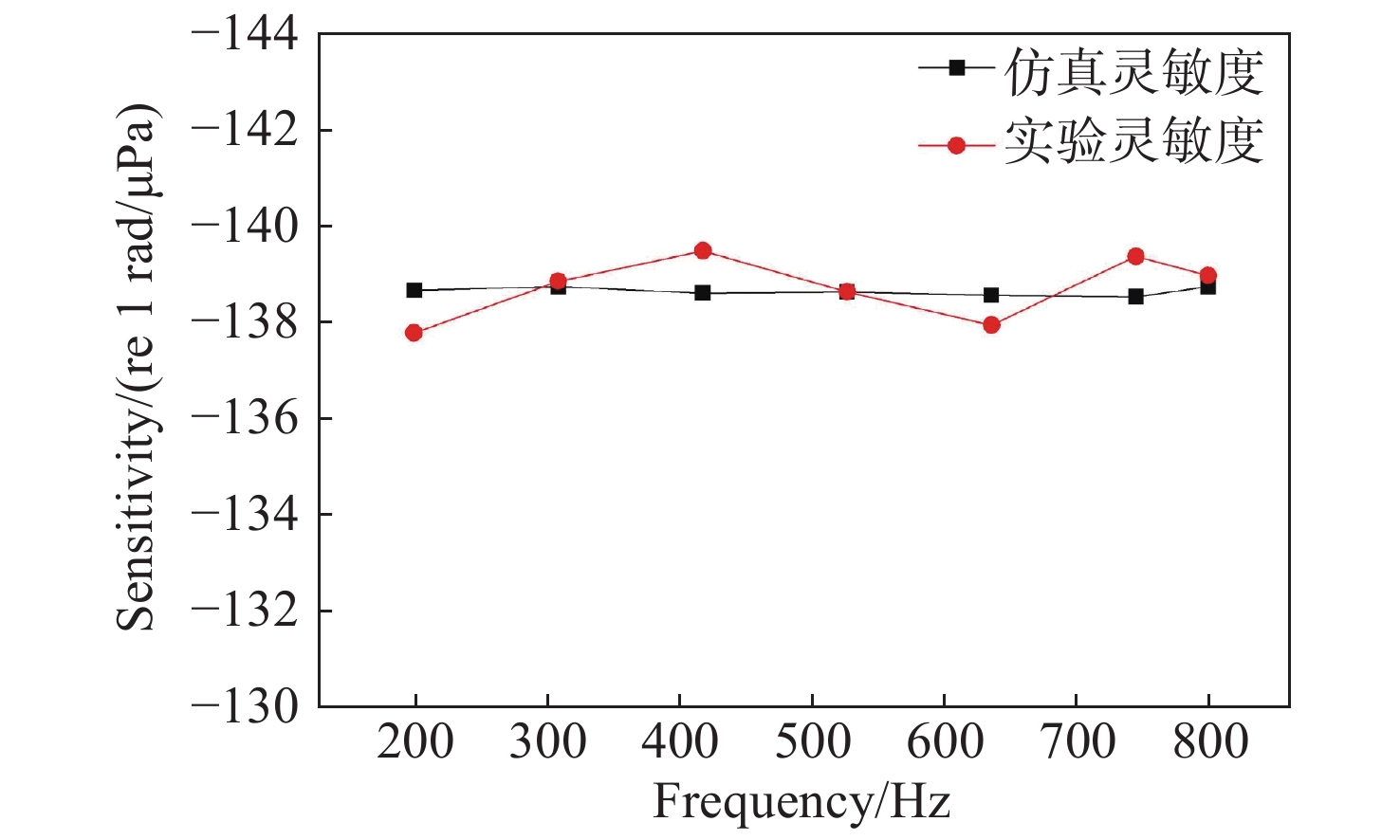
为提升光纤水听器拖曳线阵列的适装性,提出一种柔顺型光纤光栅水听器阵列。根据力学理论模型计算3种柔顺型光纤光栅水听器声压灵敏度,比较分析其影响因素,通过有限元仿真进行频响分析,研制了直径分别为10 mm、12 mm和16 mm的2元柔顺型光纤光栅水听器样阵,采用振动液柱法实验测试其灵敏度。实验结果表明:柔顺型光纤光栅水听器在200~800 Hz的频率范围内响应平坦,不同结构参数的水听器阵列平均声压灵敏度分别为−138.90 dB、−134.71 dB、−136.12 dB,验证了理论与仿真分析的正确性。按照本文的设计,通过进一步优化材料和结构参数,采用弱反射光纤光栅,可以构建数百阵元的一体化柔顺型水听器阵列。



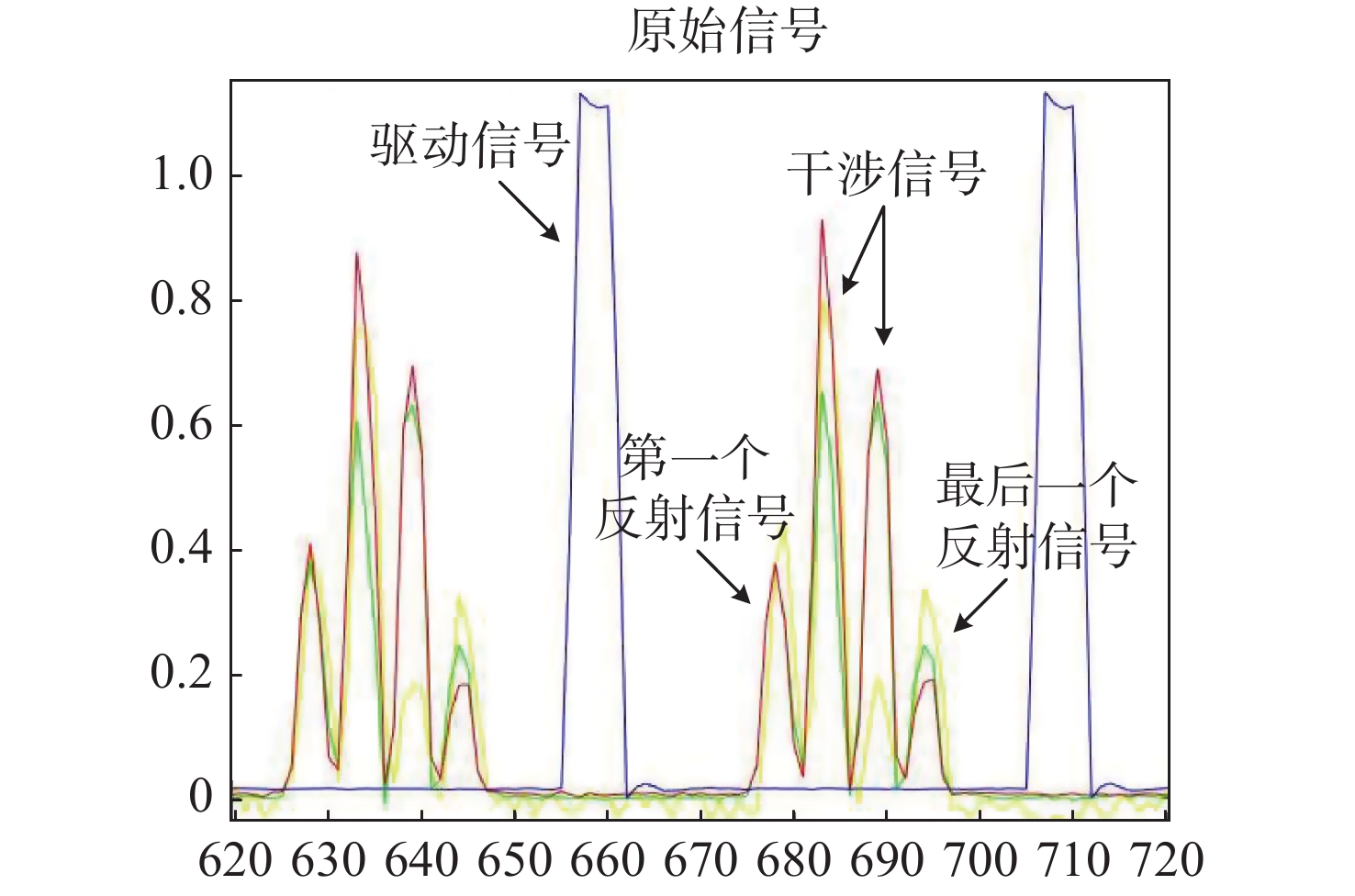



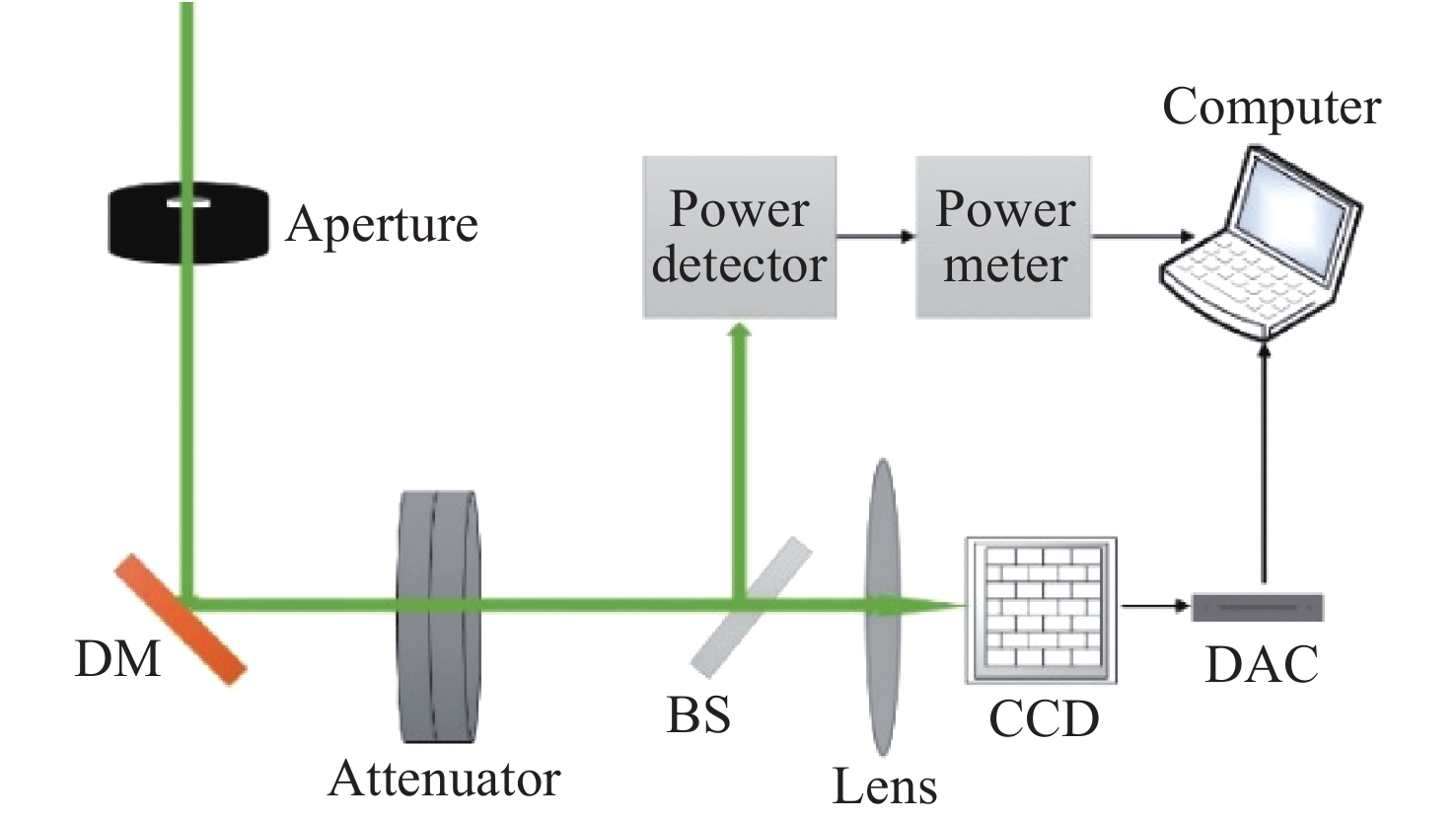
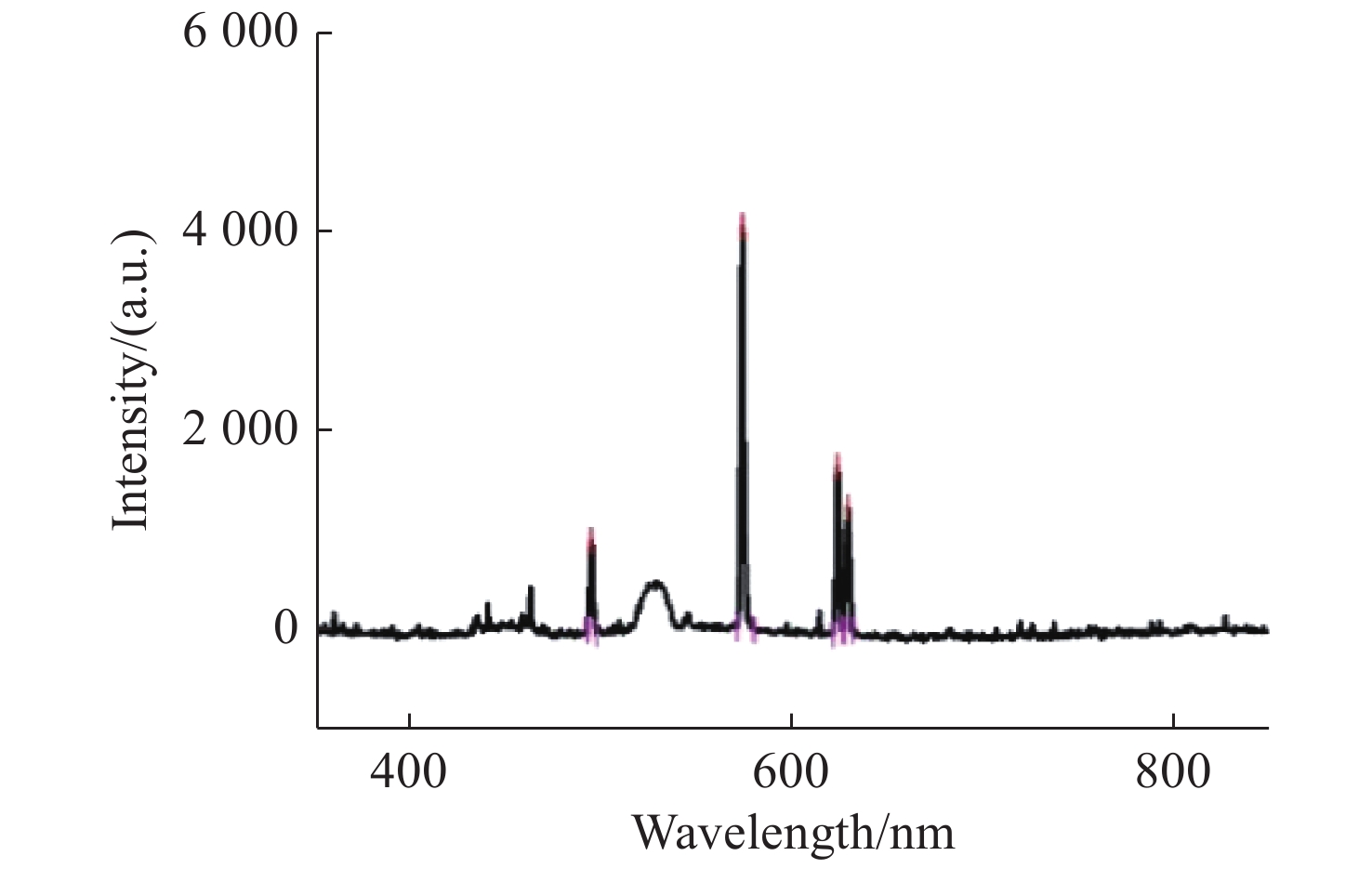
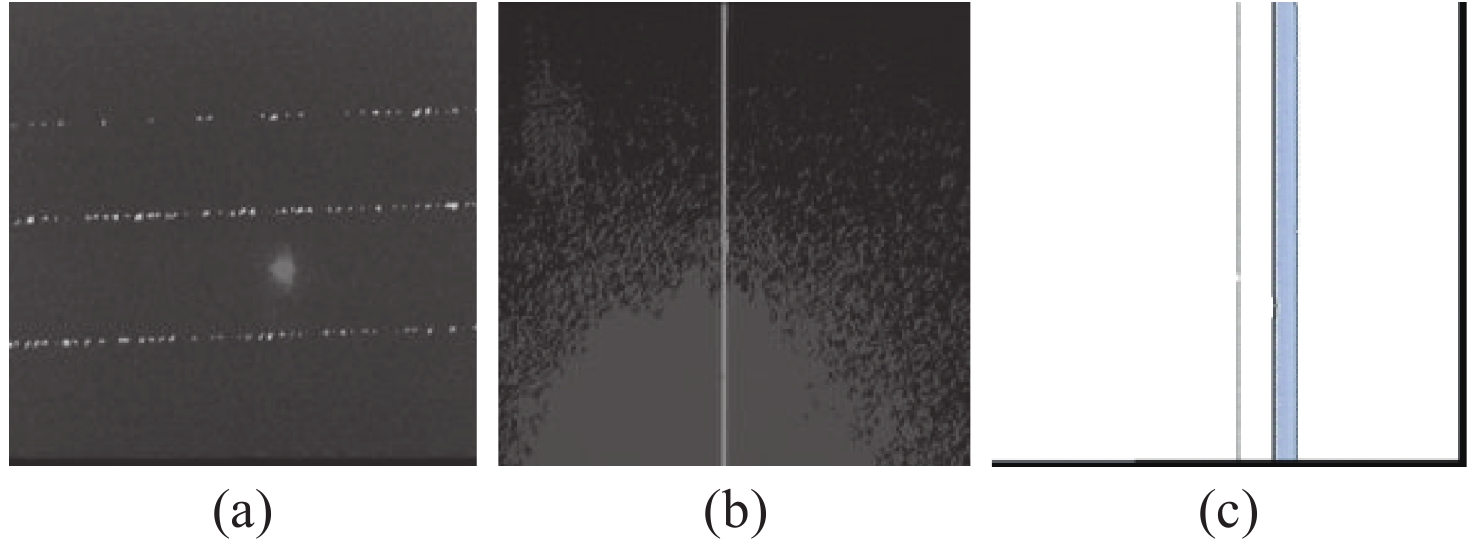
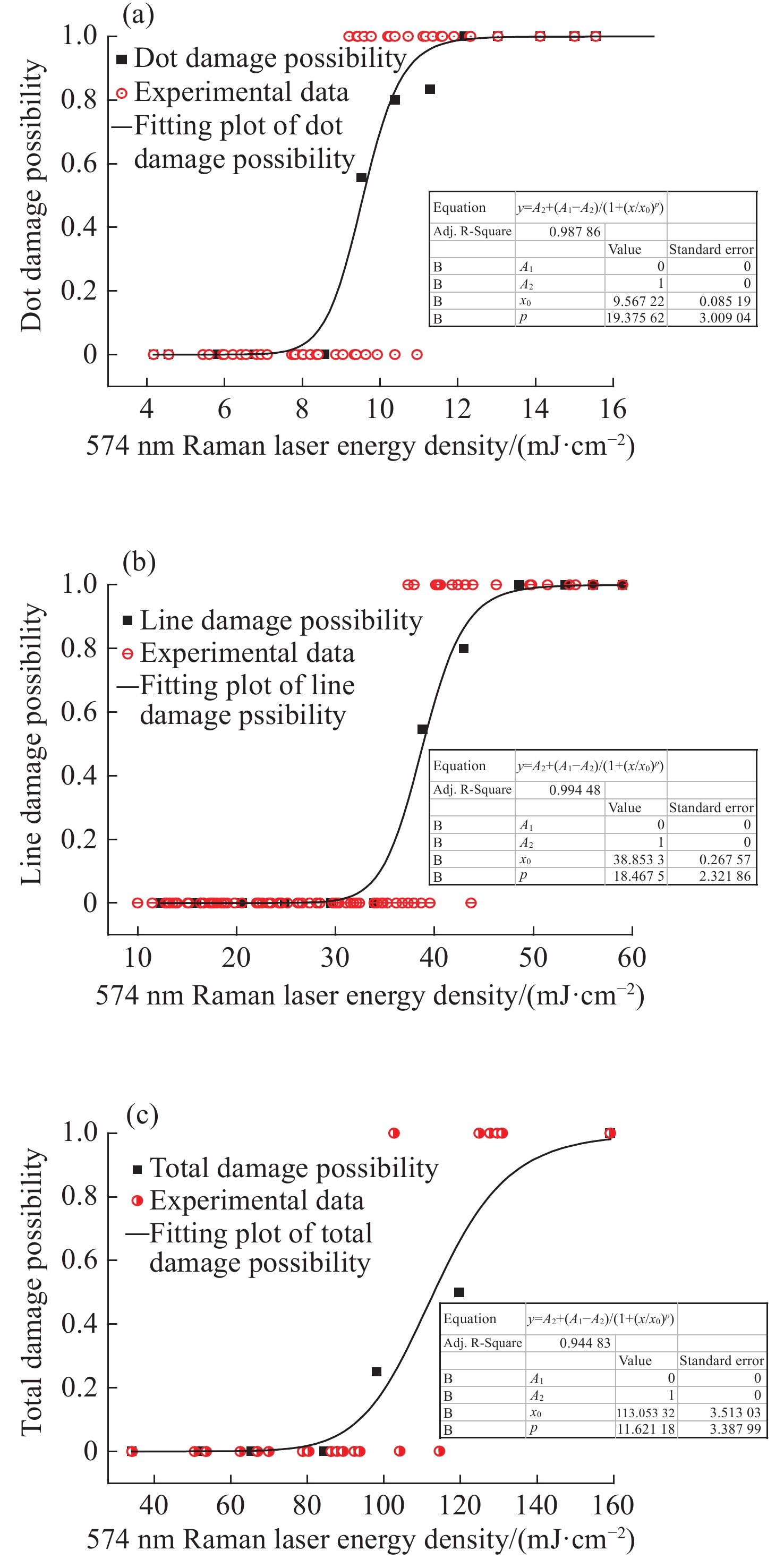
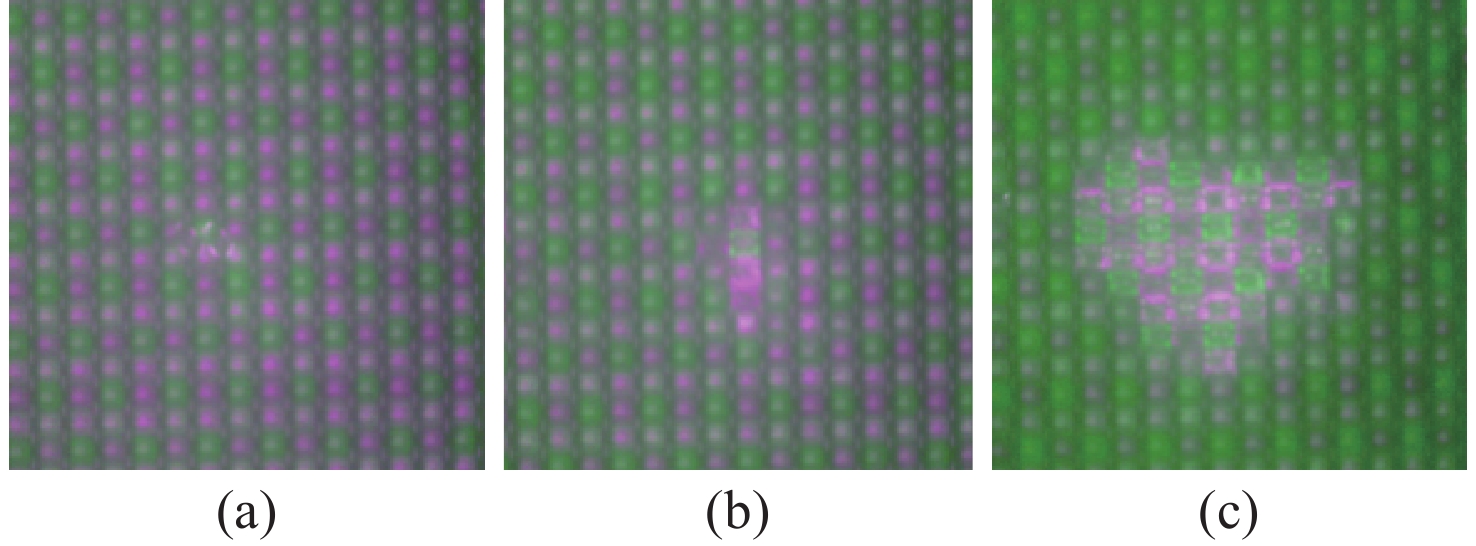
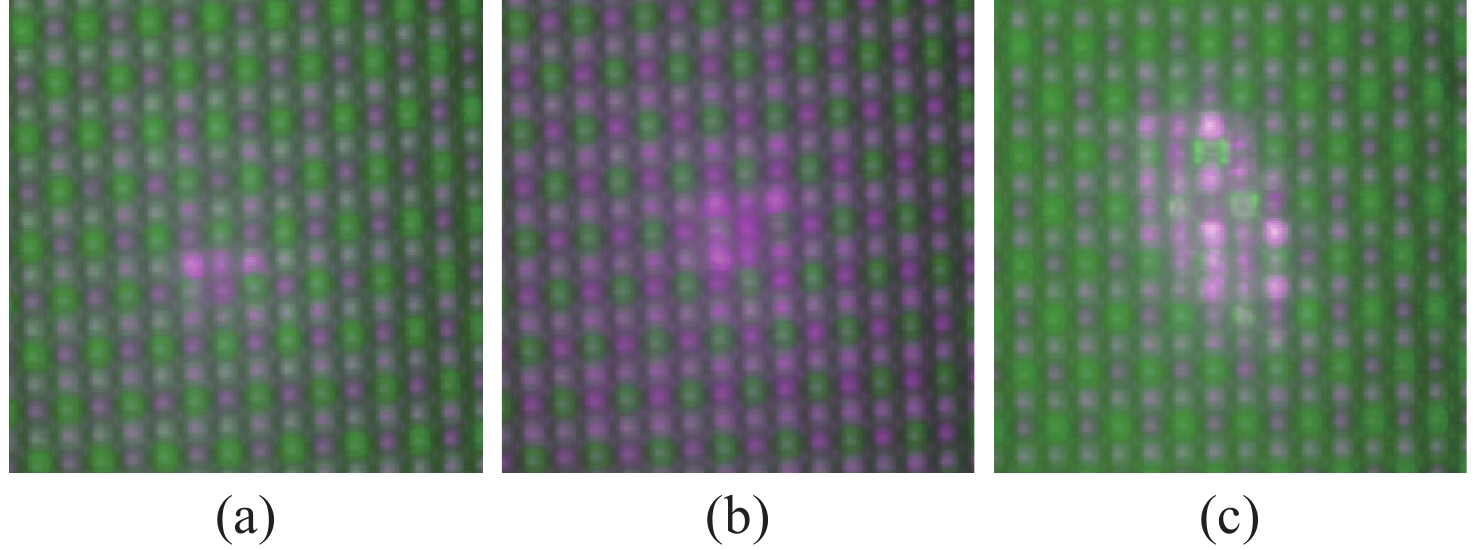
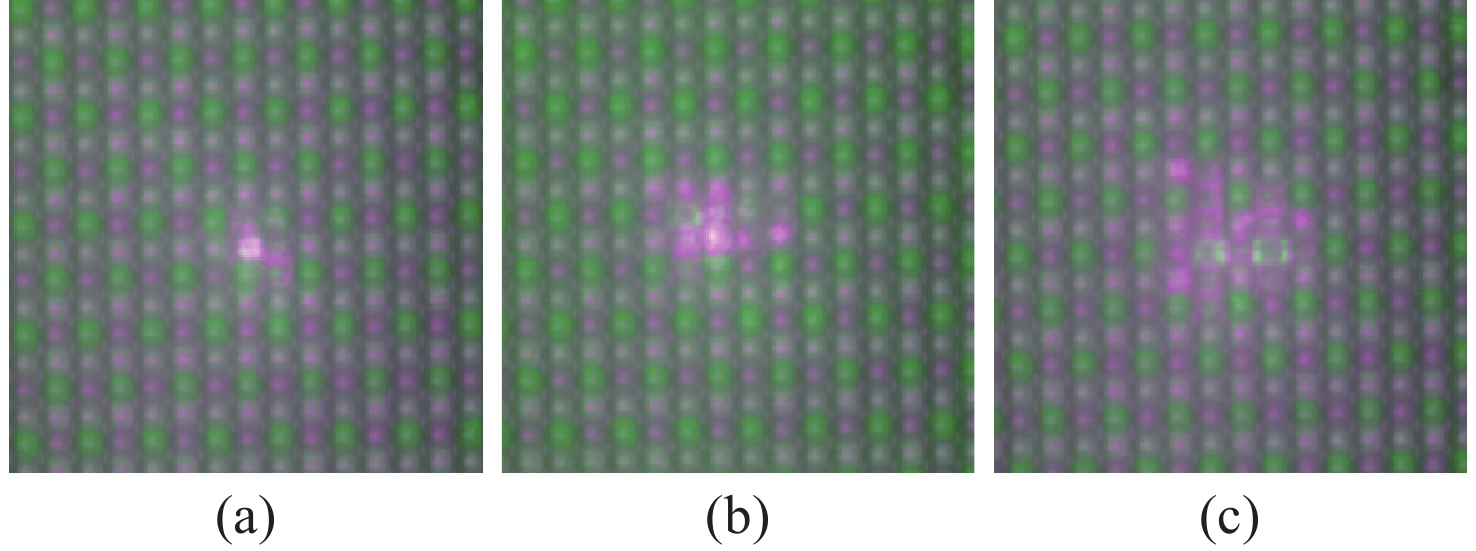
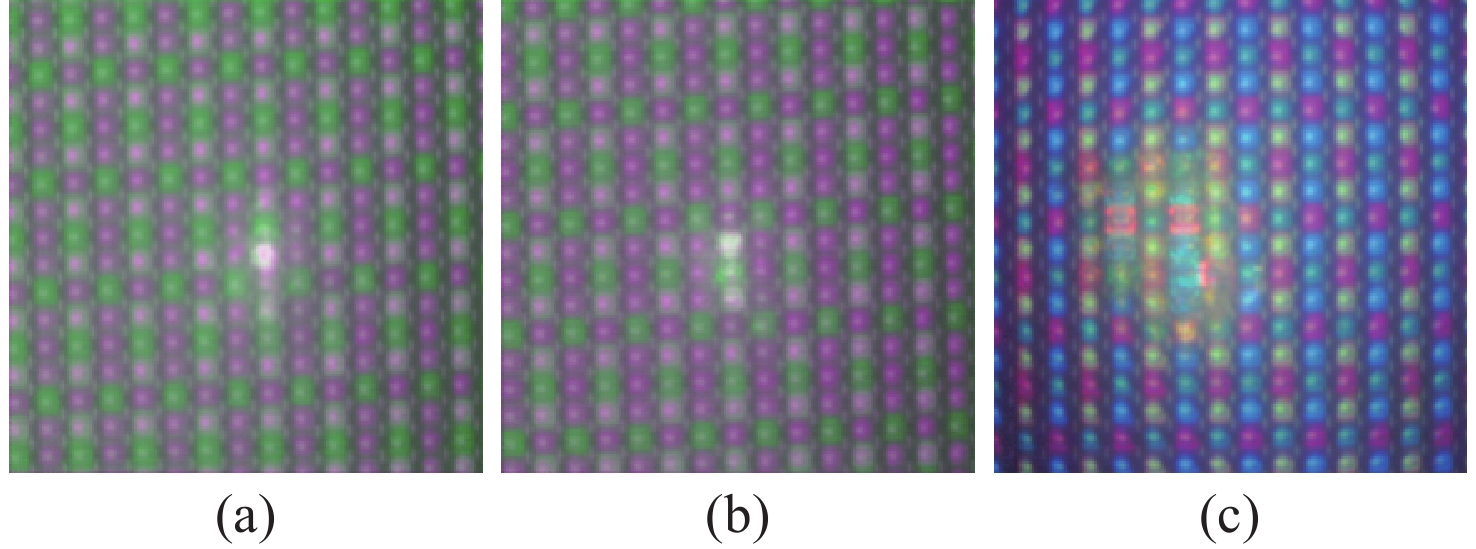
本文开展了多波长纳秒脉冲拉曼激光对行间转移CCD相机的损伤实验。分别研究了496 nm、574 nm、630 nm单波长拉曼激光与混合输出的多波长拉曼激光对CCD的点损伤、线损伤和面损伤情况,测量了不同波长拉曼激光的损伤阈值区间,并根据损伤情况统计拟合,获得了不同波长拉曼激光能量与损伤概率的关系曲线。实验结果表明:混合波长拉曼激光对CCD的损伤阈值低于单波长拉曼激光的损伤阈值,不同波长拉曼激光对于CCD的损伤阈值也存在区别,其中630 nm拉曼激光的损伤阈值低于496 nm激光,574 nm激光的损伤阈值介于496 nm和630 nm拉曼激光之间。在此基础上,通过分析CCD不同损伤情况的显微图像,以及受损伤CCD的电子学特性,对拉曼激光损伤CCD的机理进行了探讨。




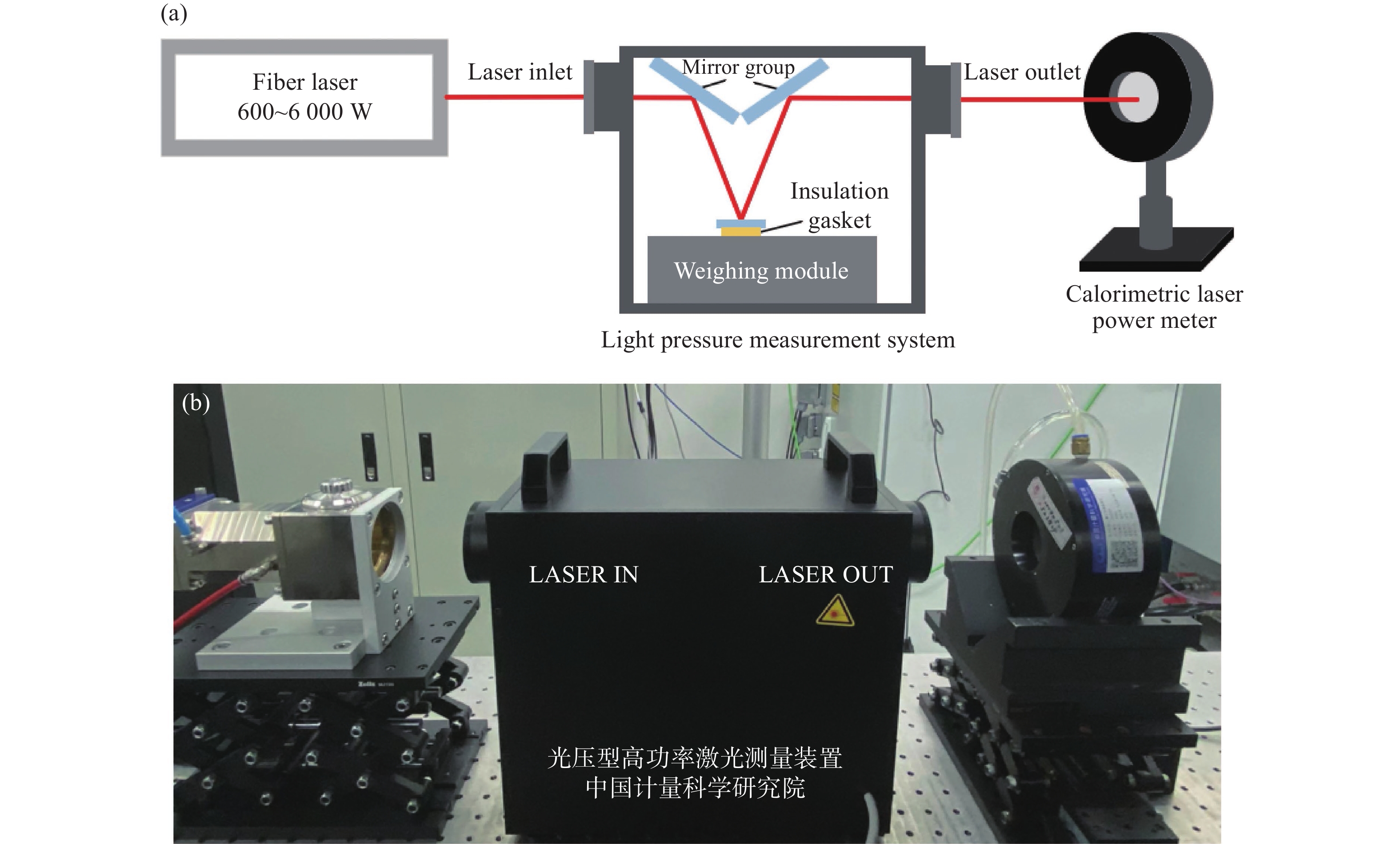
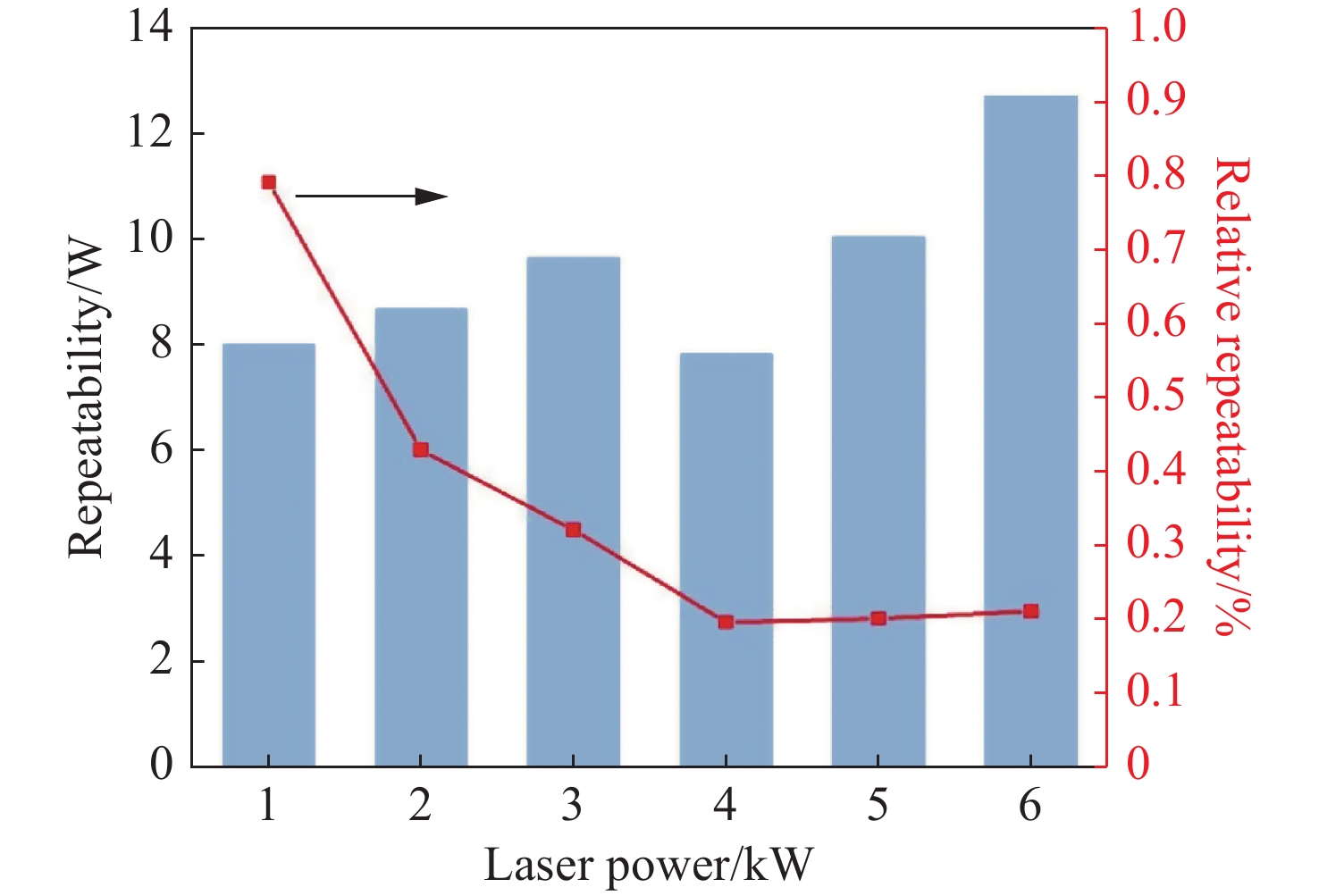
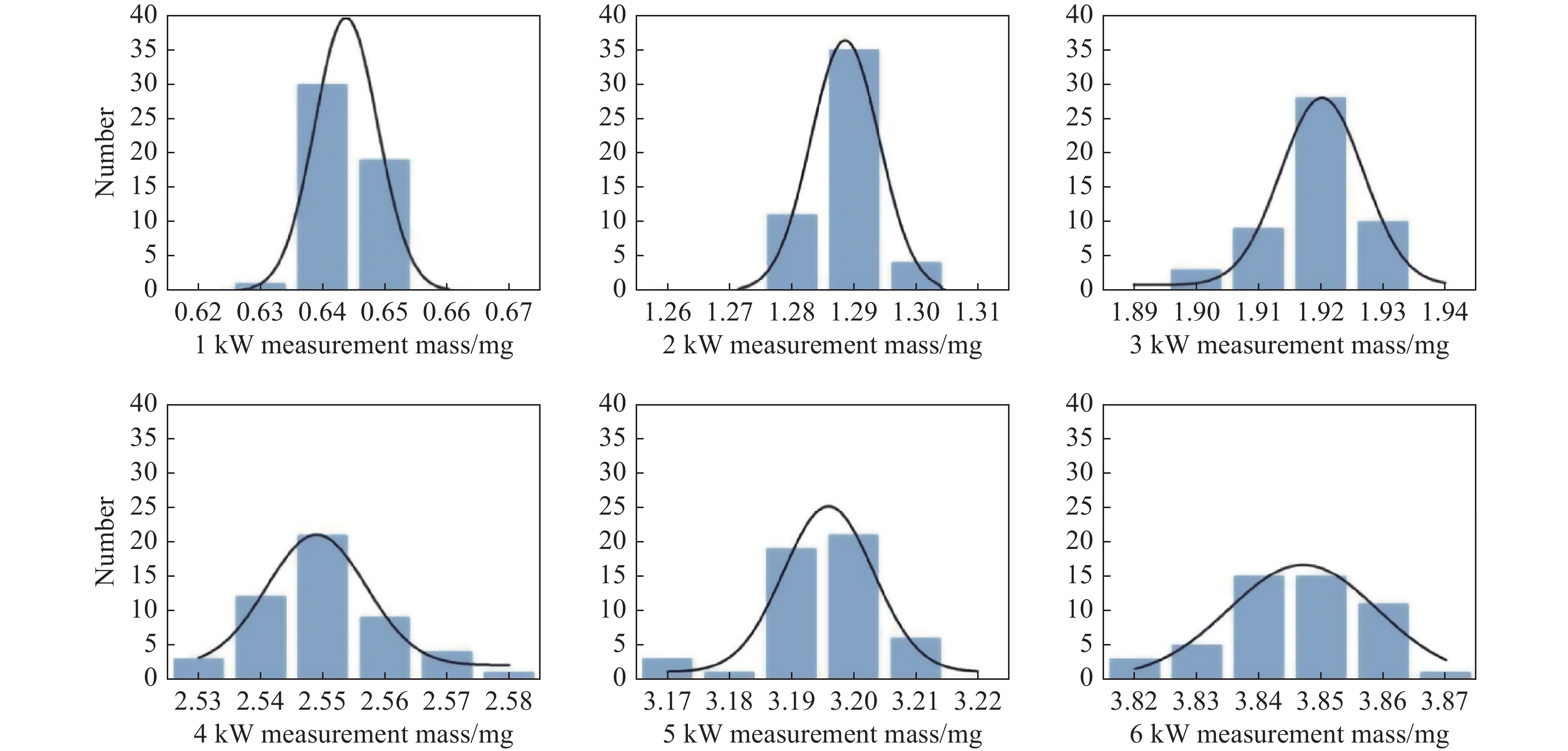
测量重复性是光压测量装置的最大不确定度分量,直接影响测量结果的准确性。为了在高功率激光测量过程中提高功率测量的准确度,搭建了基于光压的高功率激光测量装置,进行了质量测量重复性实验和激光功率测量重复性实验,对两个实验的结果进行了比较分析。实验结果显示,光压测量装置的测量重复性随被测质量和被测功率的增大而逐渐降低,表明光压方法在测量高功率激光时更具优势。在激光功率测量重复性实验中,由于避免了偏载和气流扰动的影响,因此激光功率测量重复性优于根据等效质量计算的测量重复性。研究结果对后续进一步提高光压方法的测量准确度具有指导意义。





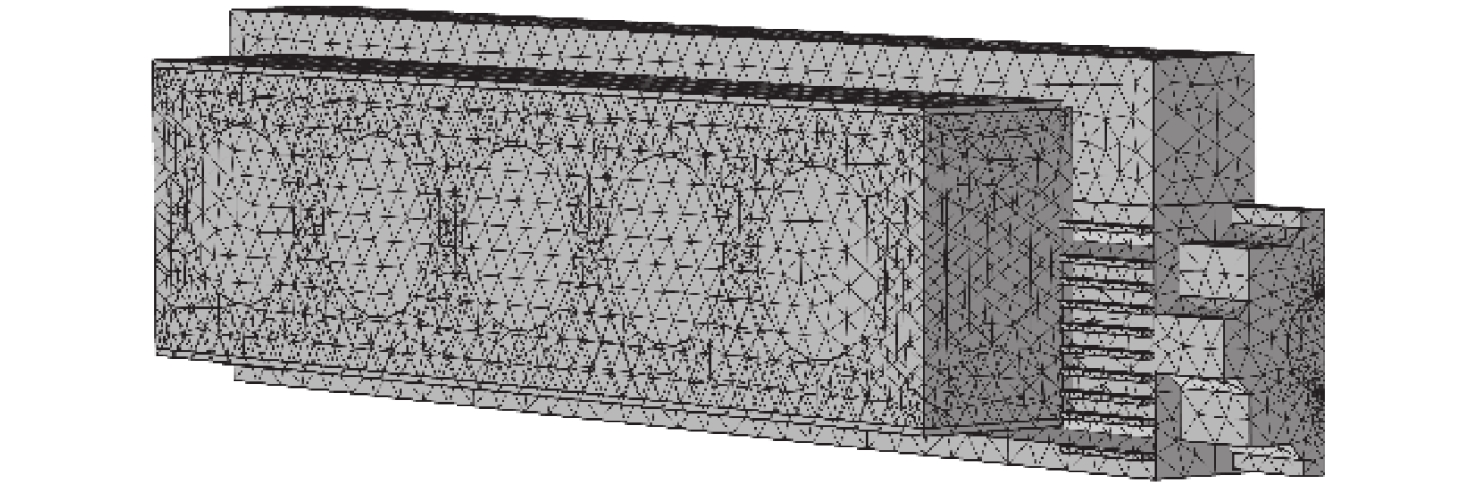
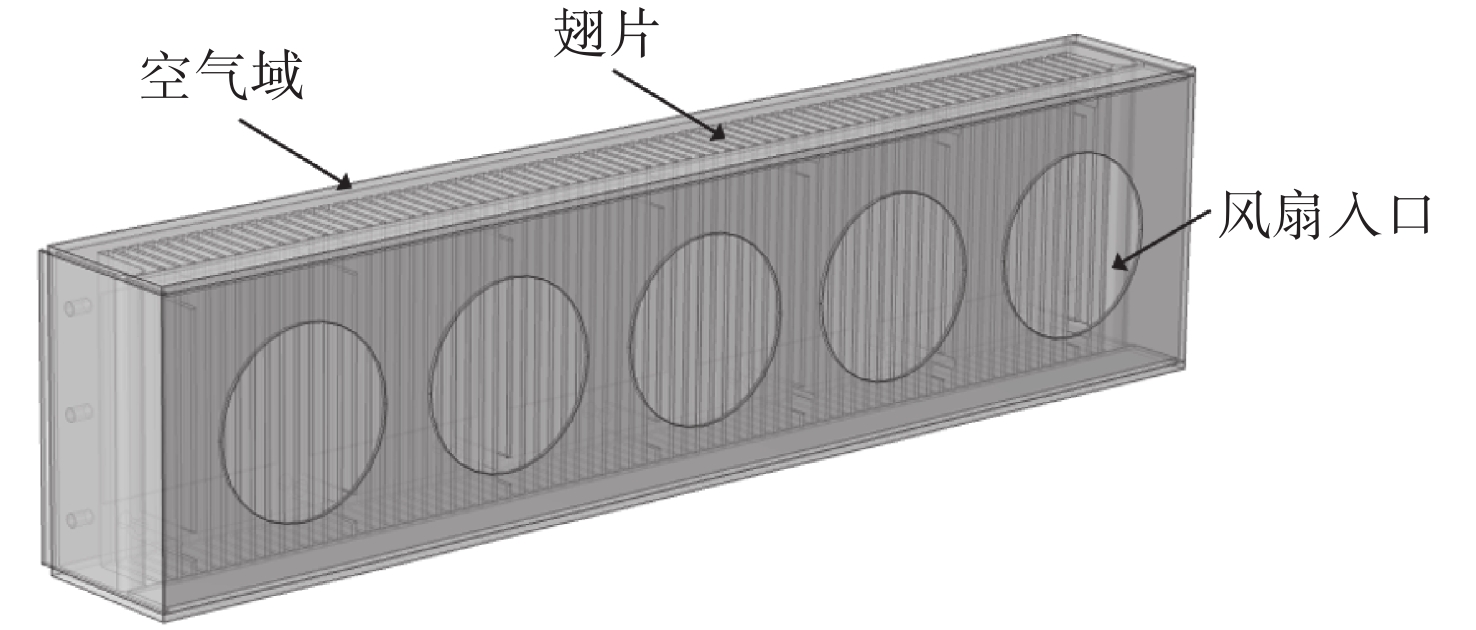
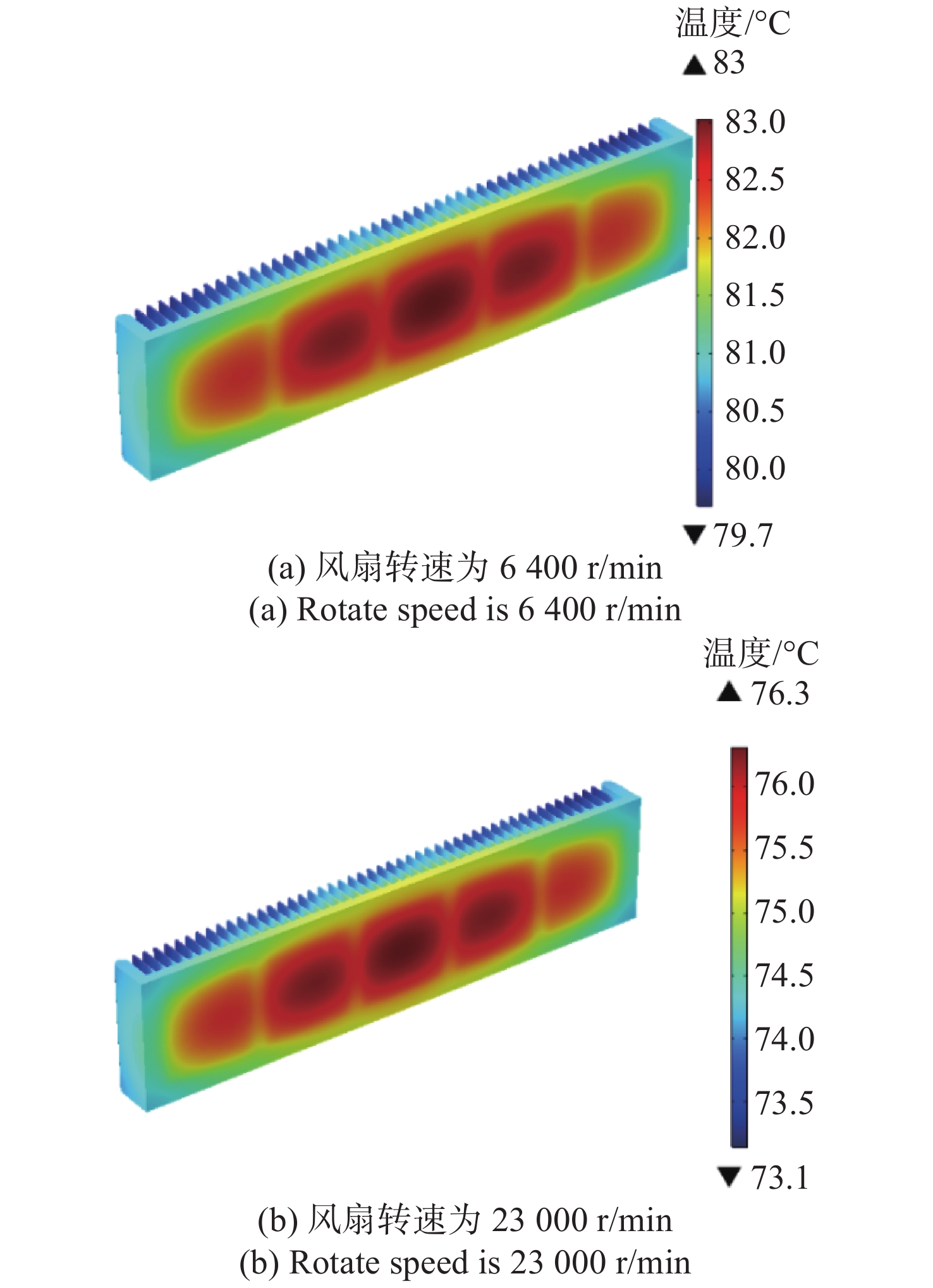
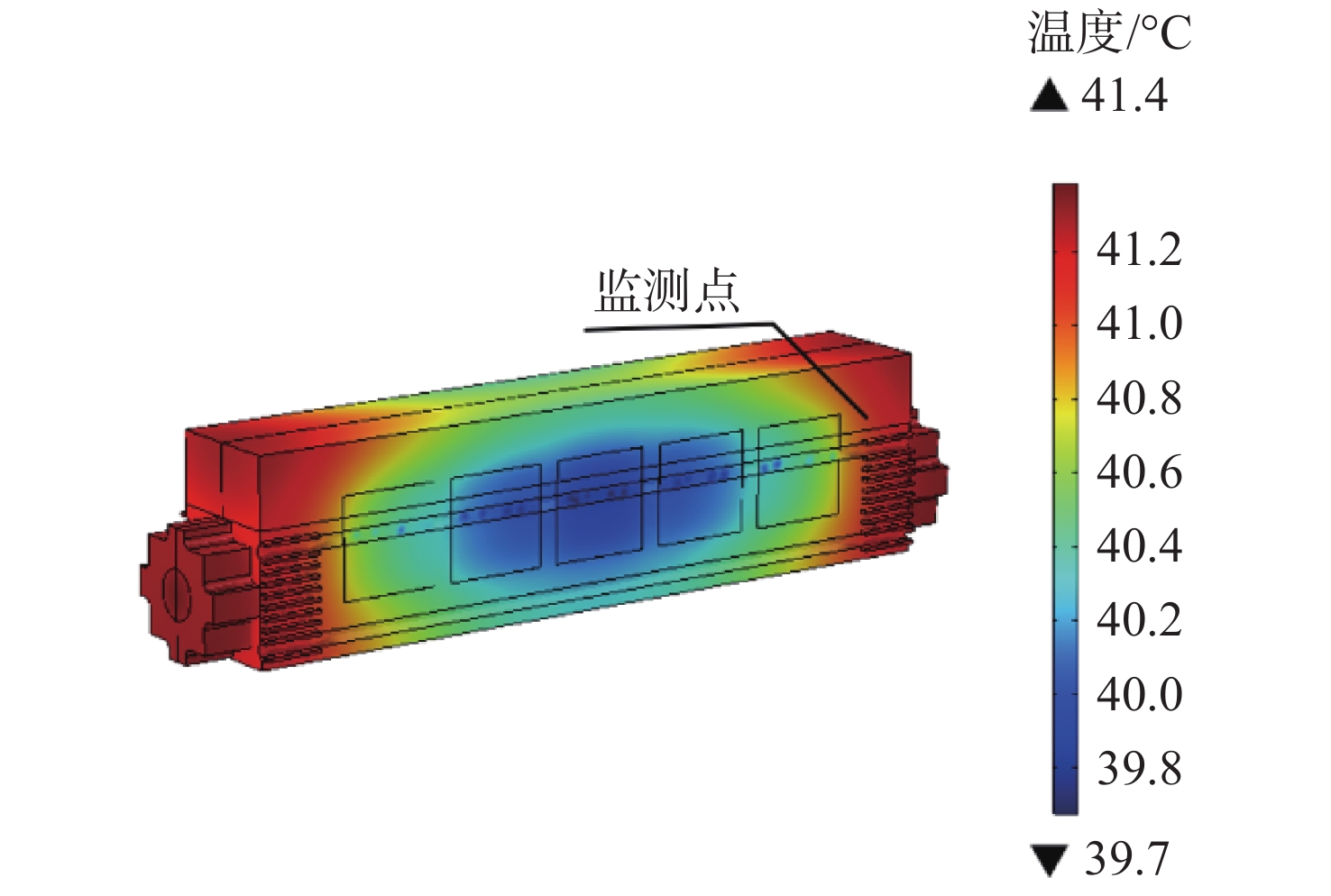
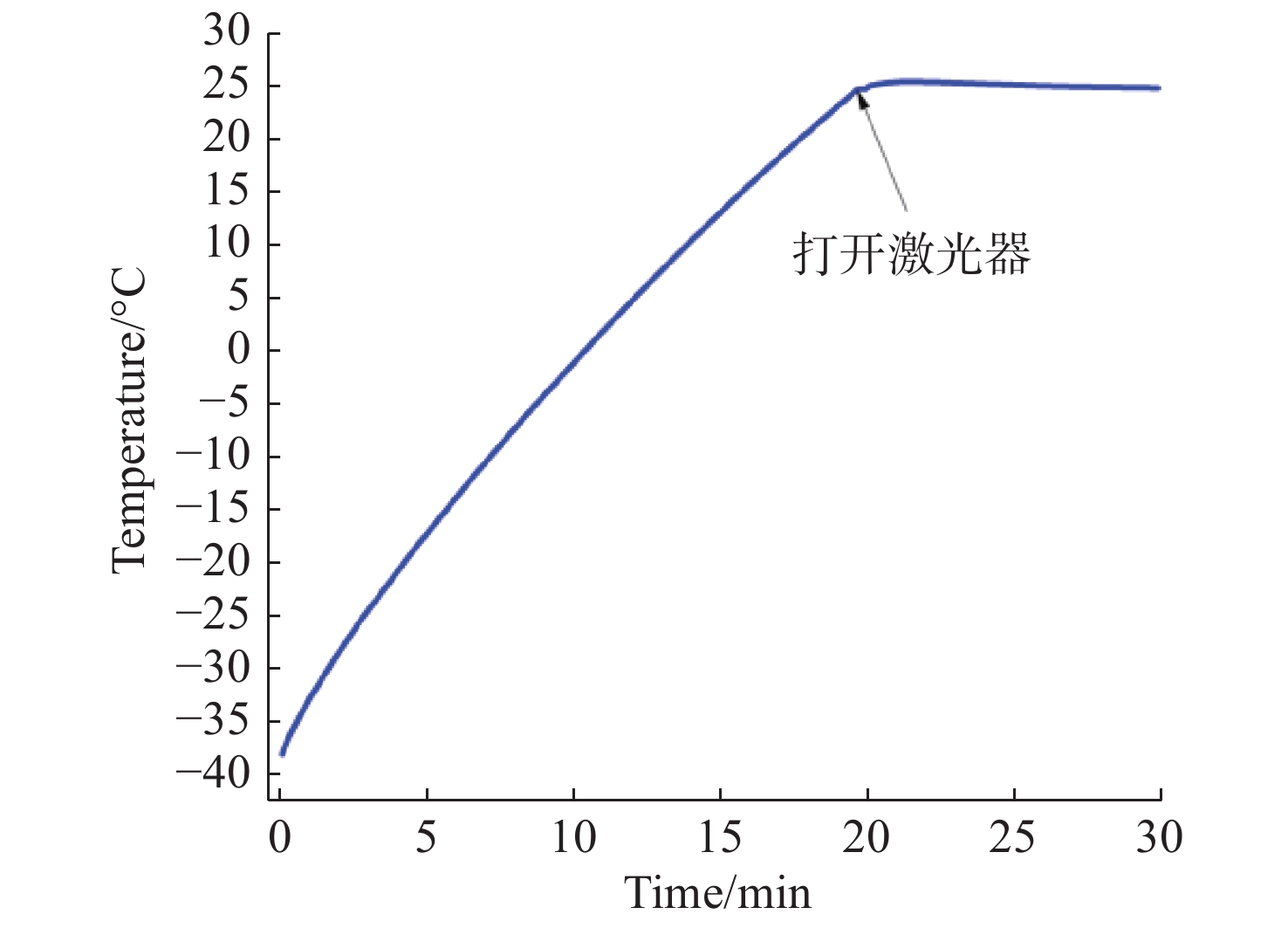
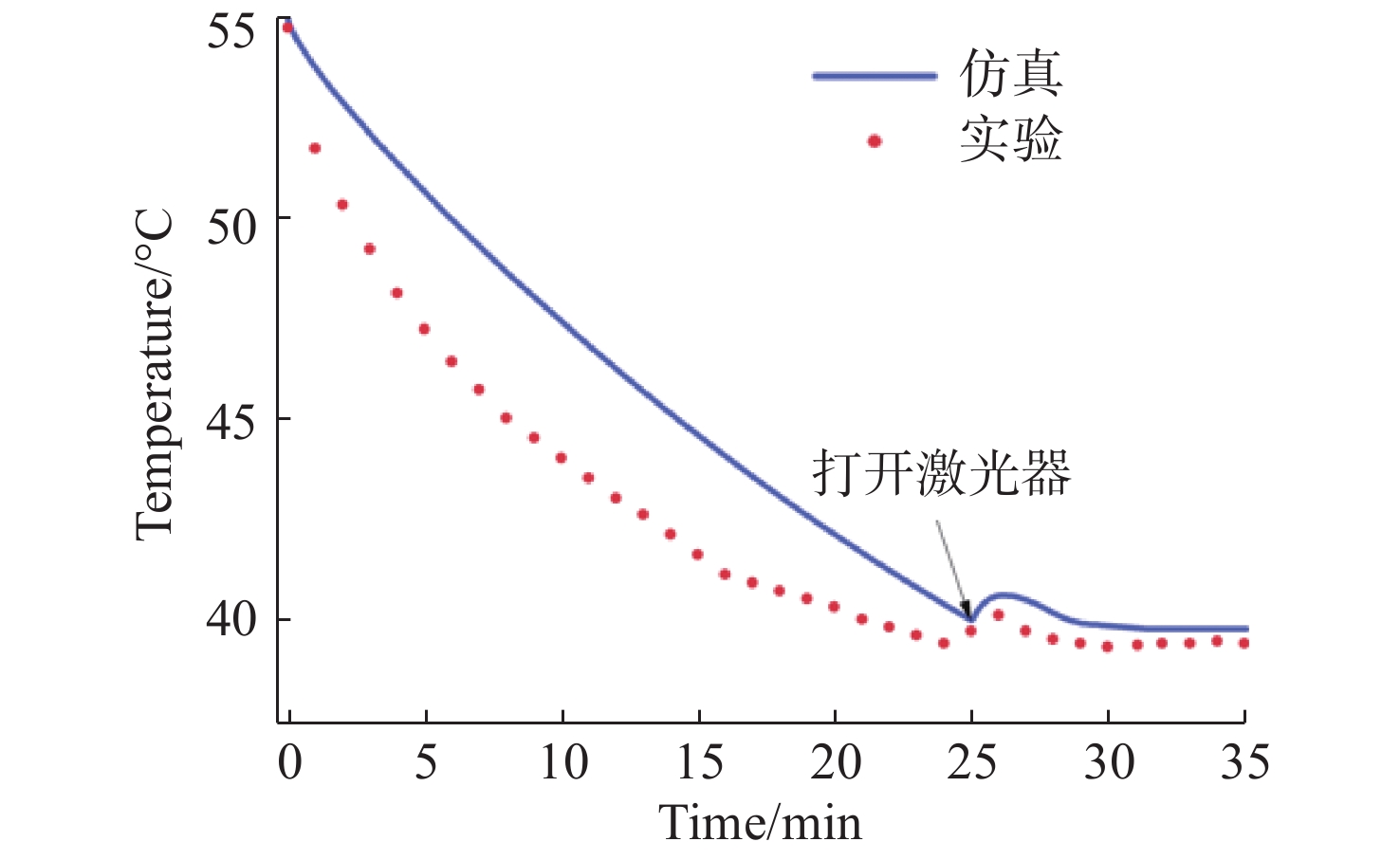
机载激光雷达是实现远距离大气精准监测的重要手段,CO2激光器工作谱段与部分大气污染物和化学物质吸收谱一致,是大气监测激光雷达的重要光源。面向机载要求,在控制体积重量的条件下实现−40 °C~55 °C宽温域工作是机载CO2激光器温控系统的设计难点。因此,本文提出一种以激光器性能和环境温度为设计输入,半导体热电制冷与强制风冷相结合的闭环温控方法。根据激光器、半导体热电制冷和强制风冷等的结构与传热特性,建立温控方法的有限元模型,基于此模型对激光器温控性能进行研究。对于55 °C高温环境,温控系统工作25 min后,激光器温度控制在40 °C;对于−40 °C低温环境,温控系统在工作20 min后,激光器温度控制在25 °C,满足激光器正常工作要求。根据激光器及建立的温控方法,开展高低温环境下激光器工作能力实验研究,采集实验过程中的激光器温度数据,测量高低温条件下激光输出能力。实验结果表明:实测激光器温度与有限元仿真温度数据基本吻合,两者误差小于10%;采用所提出的温控方法,激光器在高低温条件下可以正常工作,输出功率与室温条件下一致。







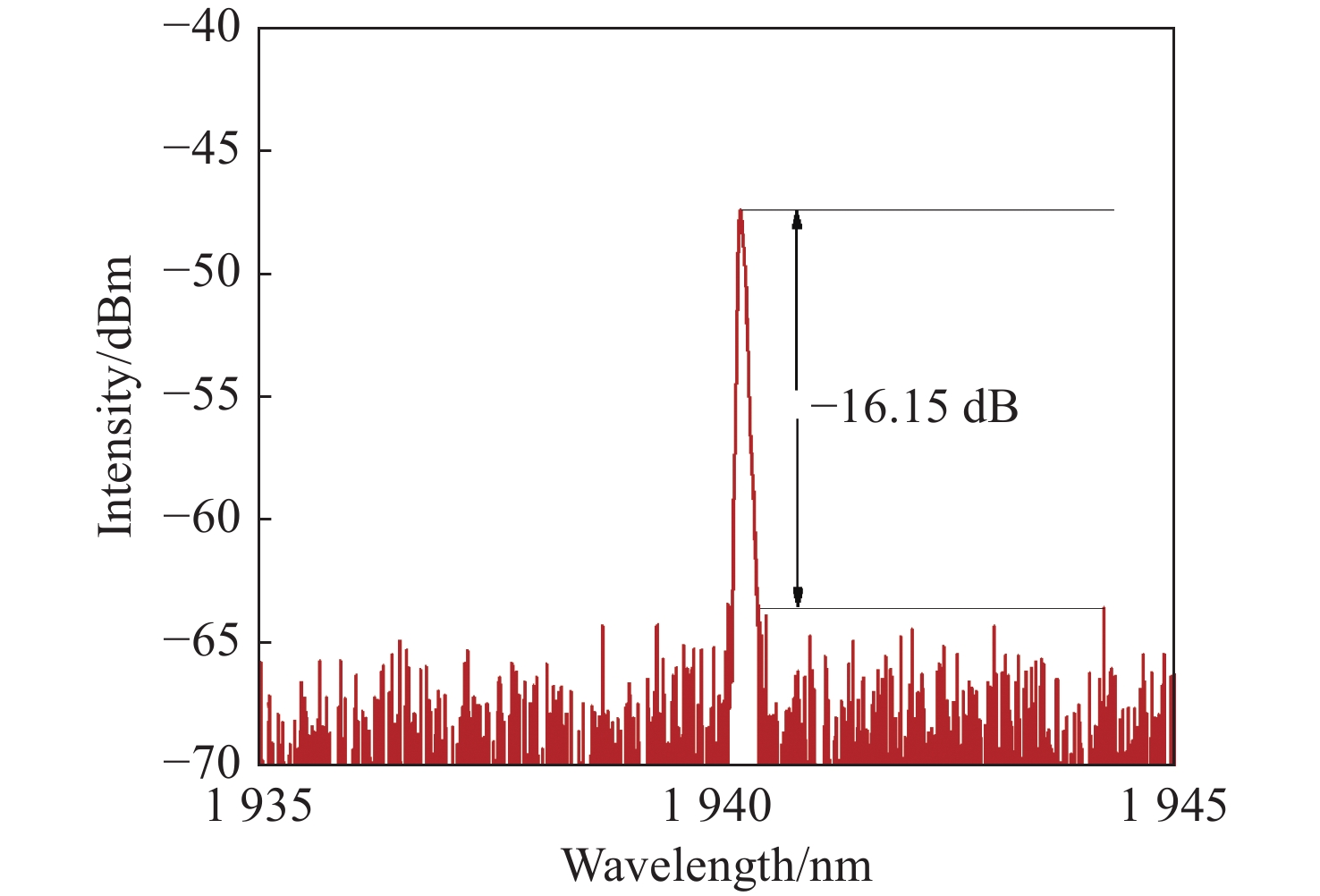
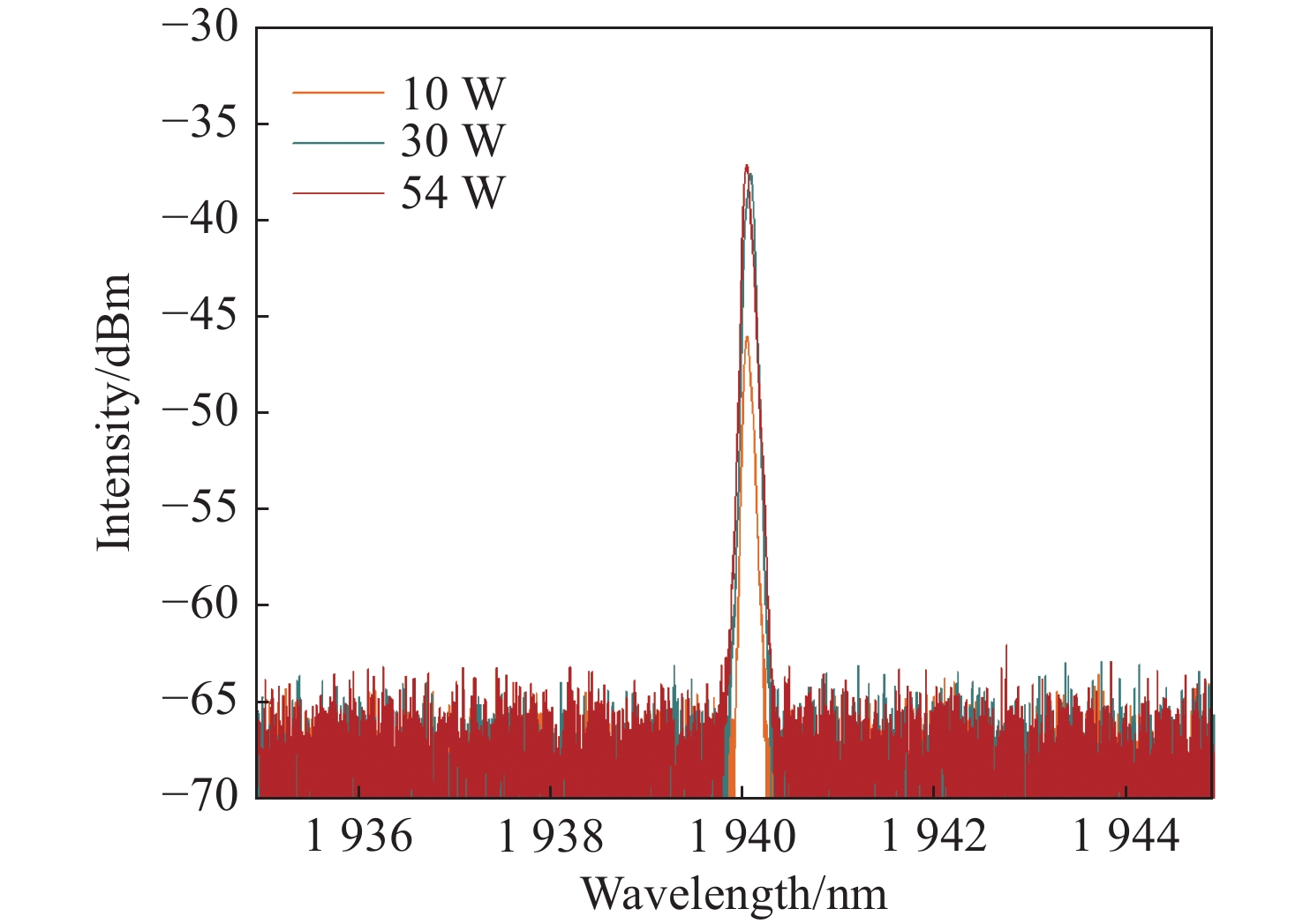
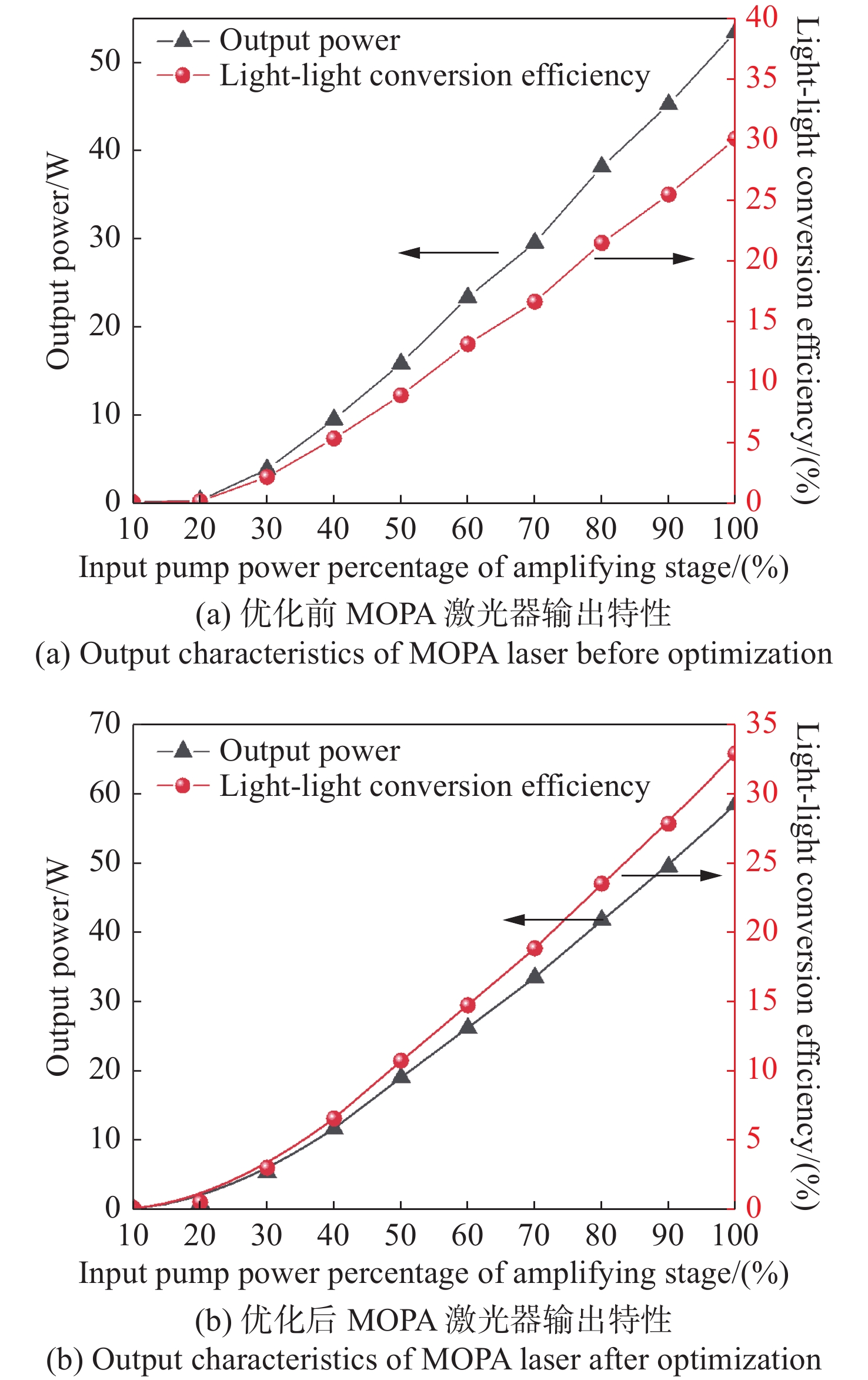
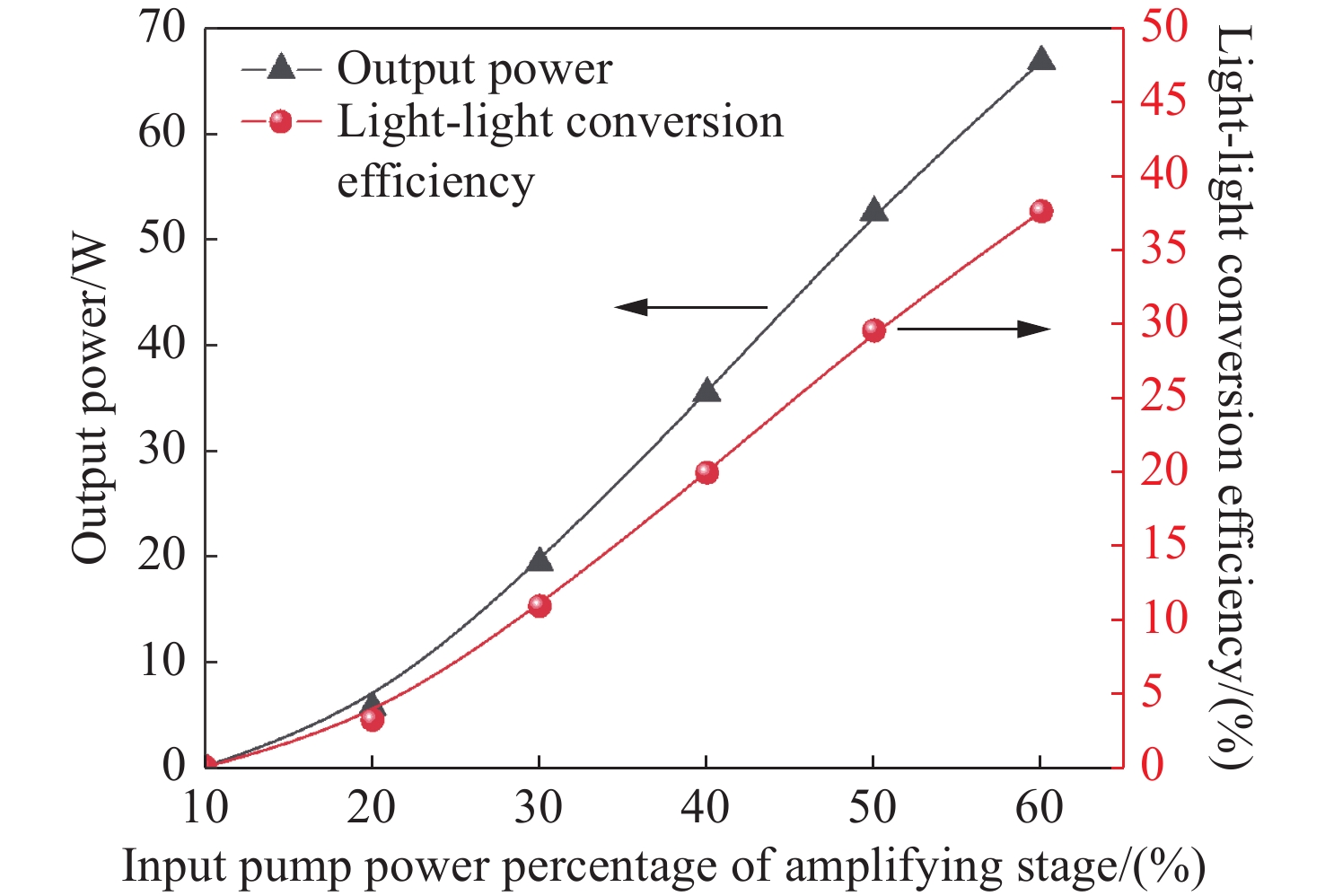
为改善高功率掺铥光纤激光器(TDFL)的输出性能,提高系统的光-光转化效率,研制了一种全光纤主振荡功率放大结构(MOPA)的高功率TDFL,可在连续(CW)和准连续(QCW)两种模式下工作。首先,搭建了激光振荡器,对种子源激光器的输出特性进行研究。接着,搭建掺铥光纤放大器,并将其与激光振荡器连接,研究MOPA结构光纤激光器的输出特性。最后,在QCW调制模式下,分析MOPA结构光纤激光器的脉冲特性。结果表明:激光振荡器实现了中心波长为1940 nm连续稳定的激光输出,最高平均输出功率为18.56 W,斜率效率为54.84%,且光谱无拉曼成分。利用该低功率连续激光作为种子源经过自制的掺铥光纤放大器后,平均输出功率可达66.9 W,斜率效率为48.48%。当系统在QCW模式下工作时,可以实现对频率和占空比的调节,且当频率为75 Hz,占空比为10%时,经计算其峰值功率为80.3 W。该研究方案对研制2 μm波段更高功率的MOPA激光器具有参考意义。




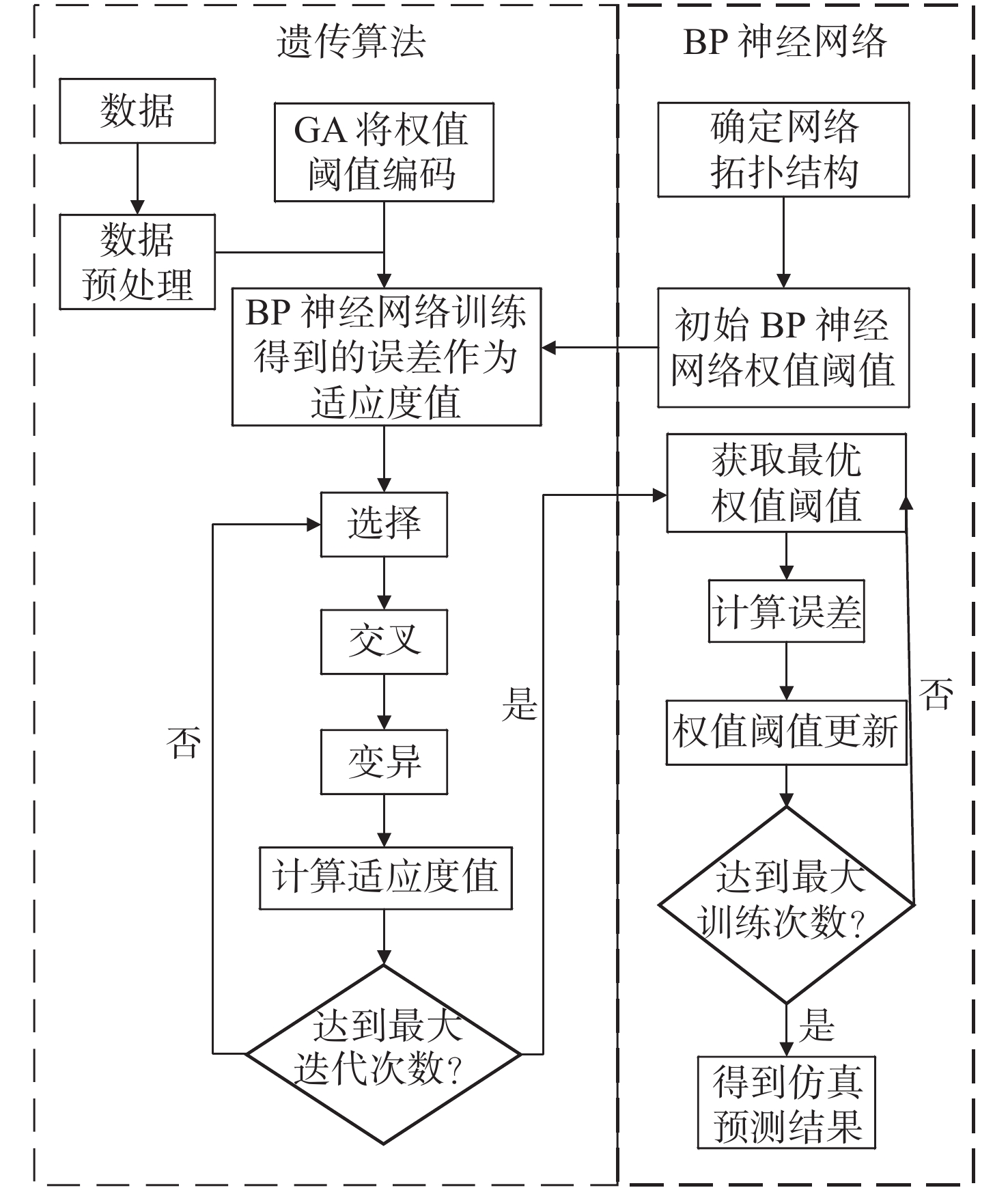
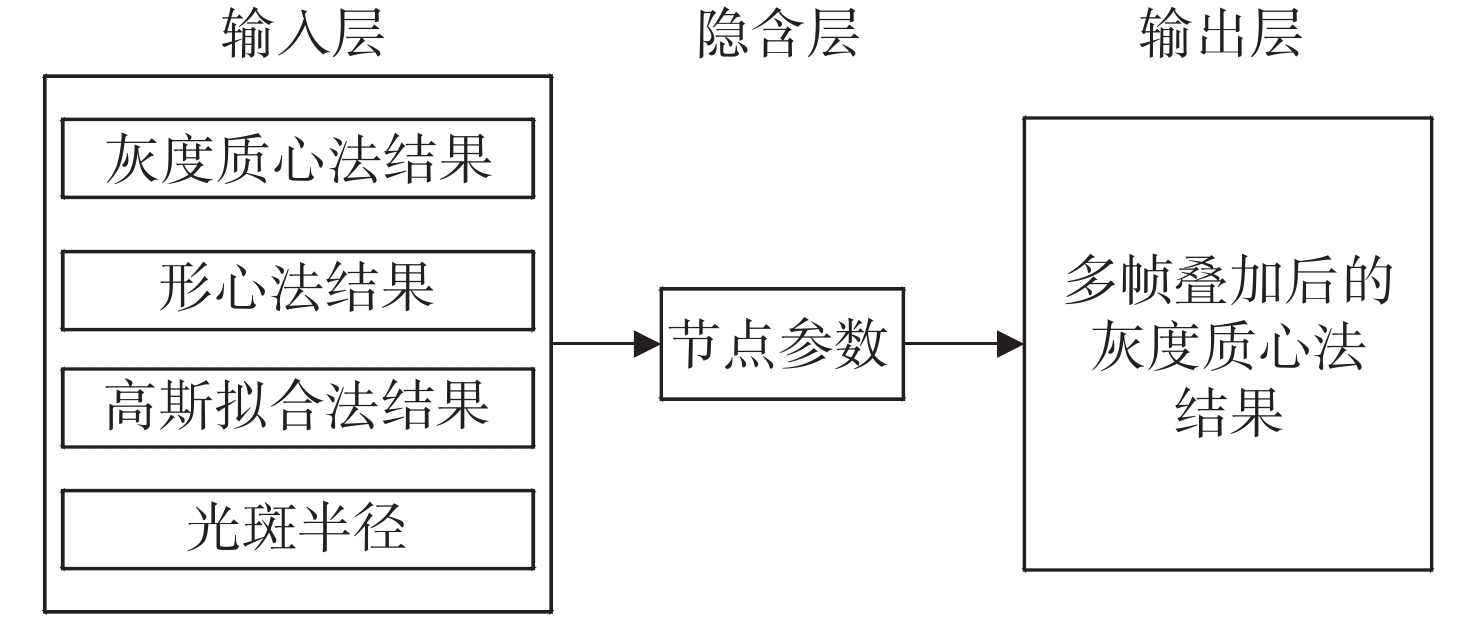
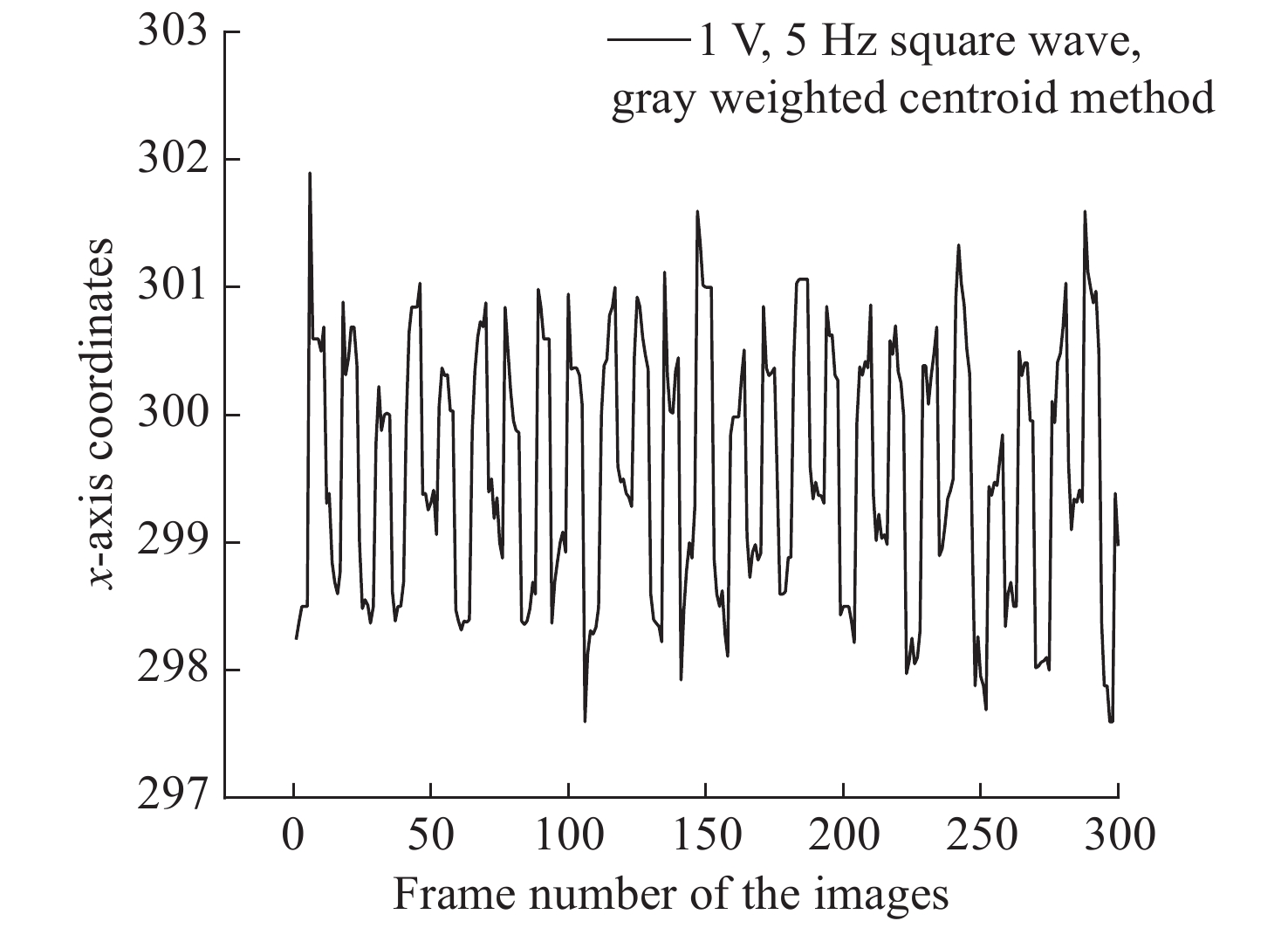
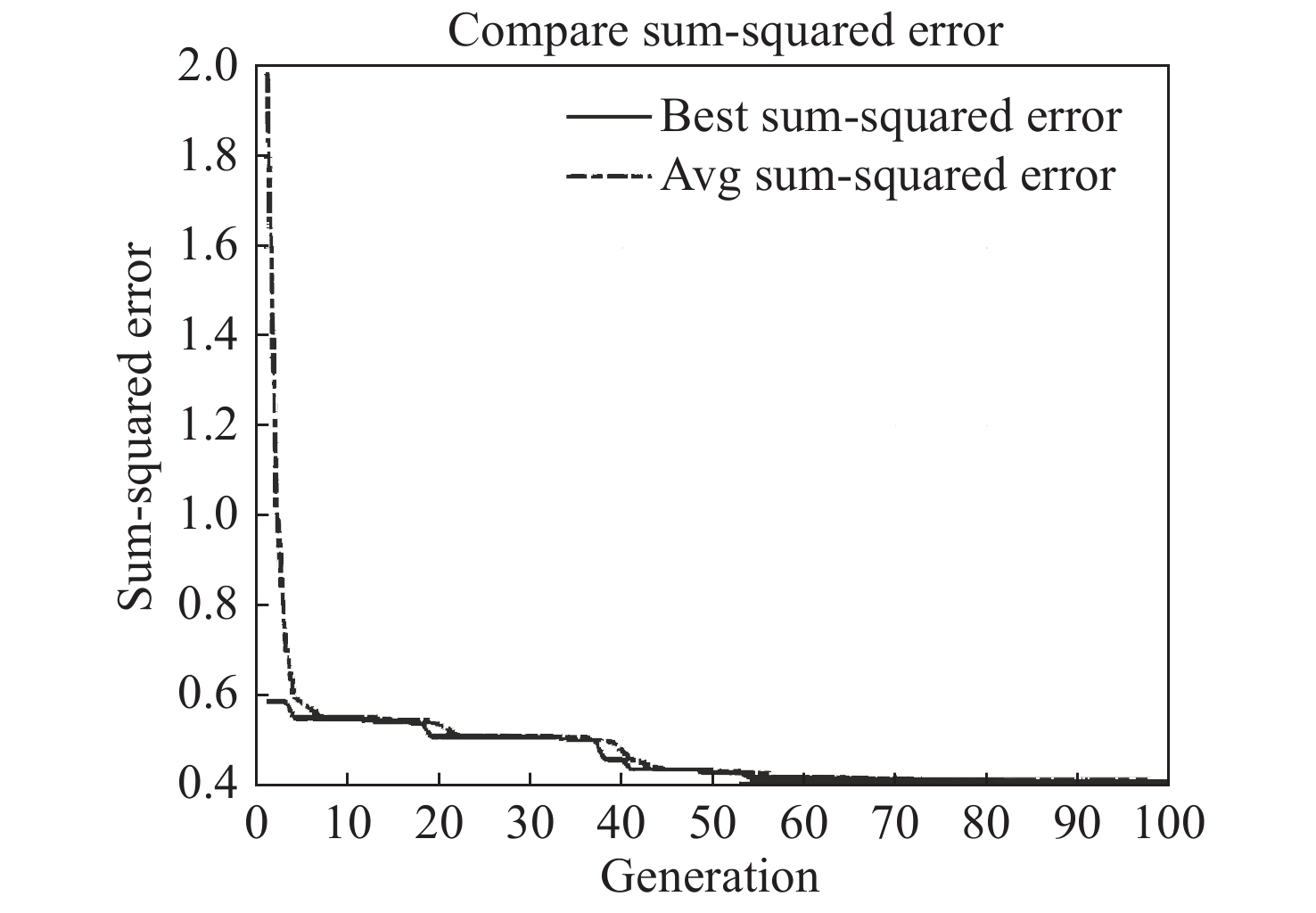
针对振动环境中传统光斑中心定位算法存在的处理时间长、精度低等问题,本文提出一种基于遗传算法优化BP神经网络的光斑定位方法。使用BP神经网络对光斑位置进行预测,并通过遗传算法对神经网络进行优化。构建BP神经网络模型,将使用质心、形心、高斯拟合等方法求出的光斑中心位置以及形心法求出的光斑半径作为输入,对光斑真实中心位置进行预测。并使用遗传算法优化神经网络的权值和阈值,以增强预测效果。实验过程中,通过对光学系统外加干扰模拟振动环境,采集数据用于神经网络训练和算法验证。实验结果表明,优化前后的标定测试迭代次数分别为55和29,平均误差分别为0.81像素和0.45像素。由本文结果可知,在遗传算法的优化下,神经网络算法的迭代速度和预测精度均有所提高。




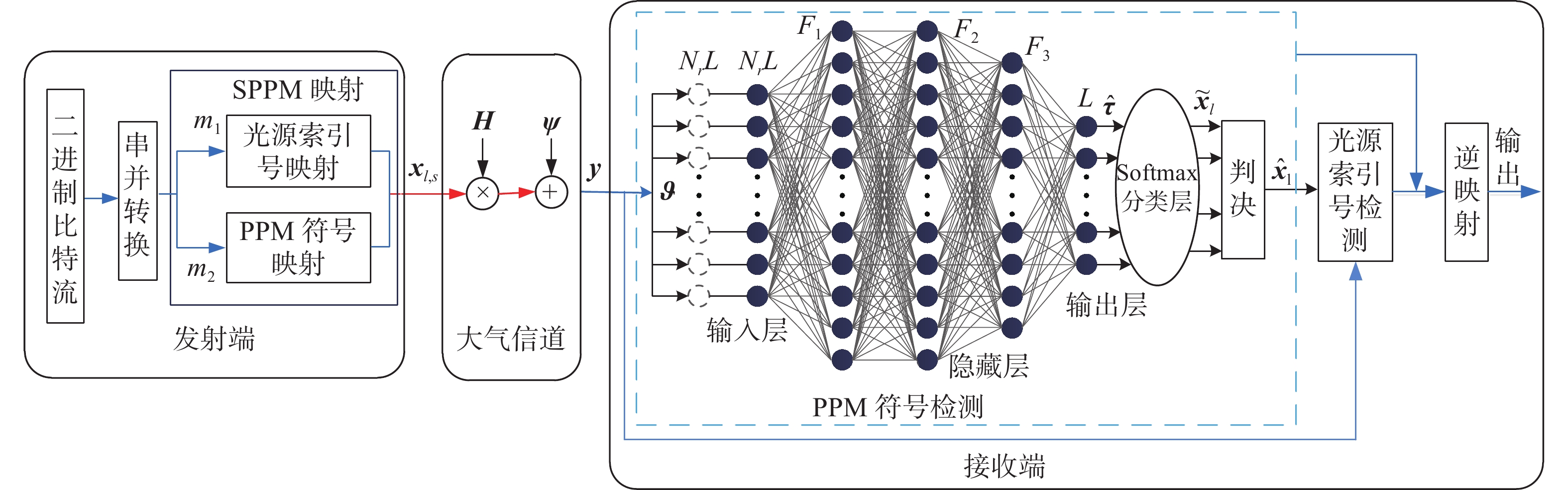
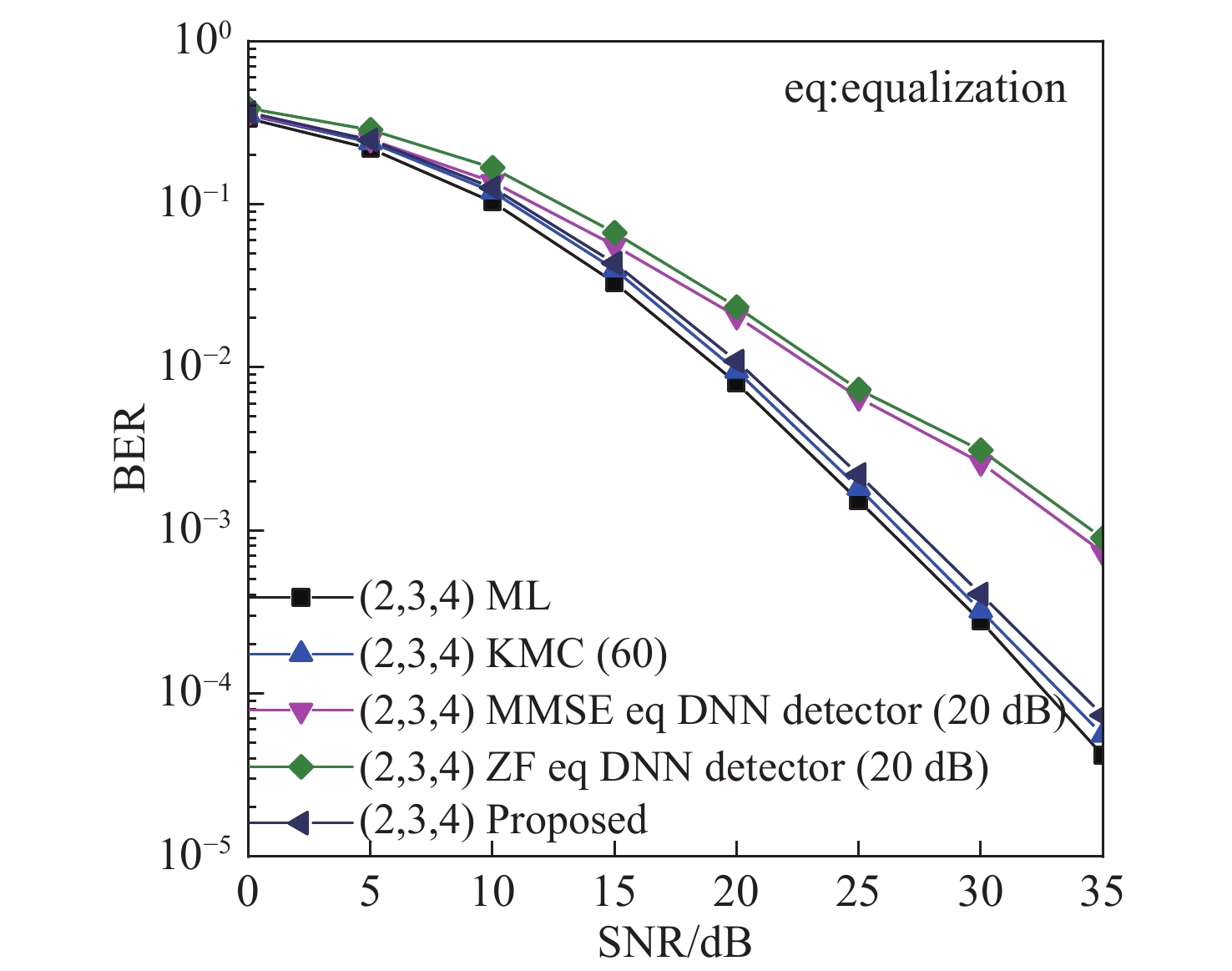
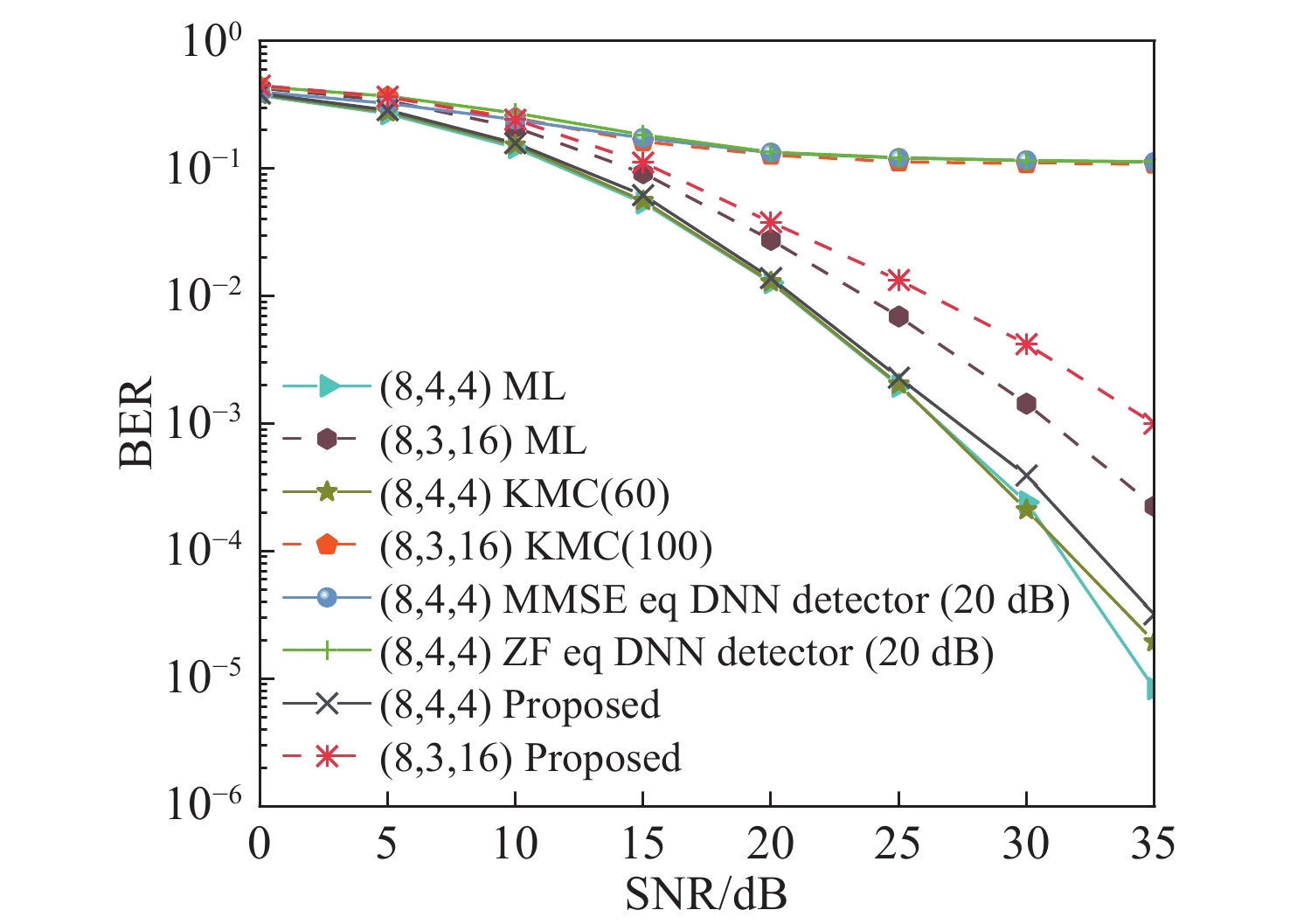
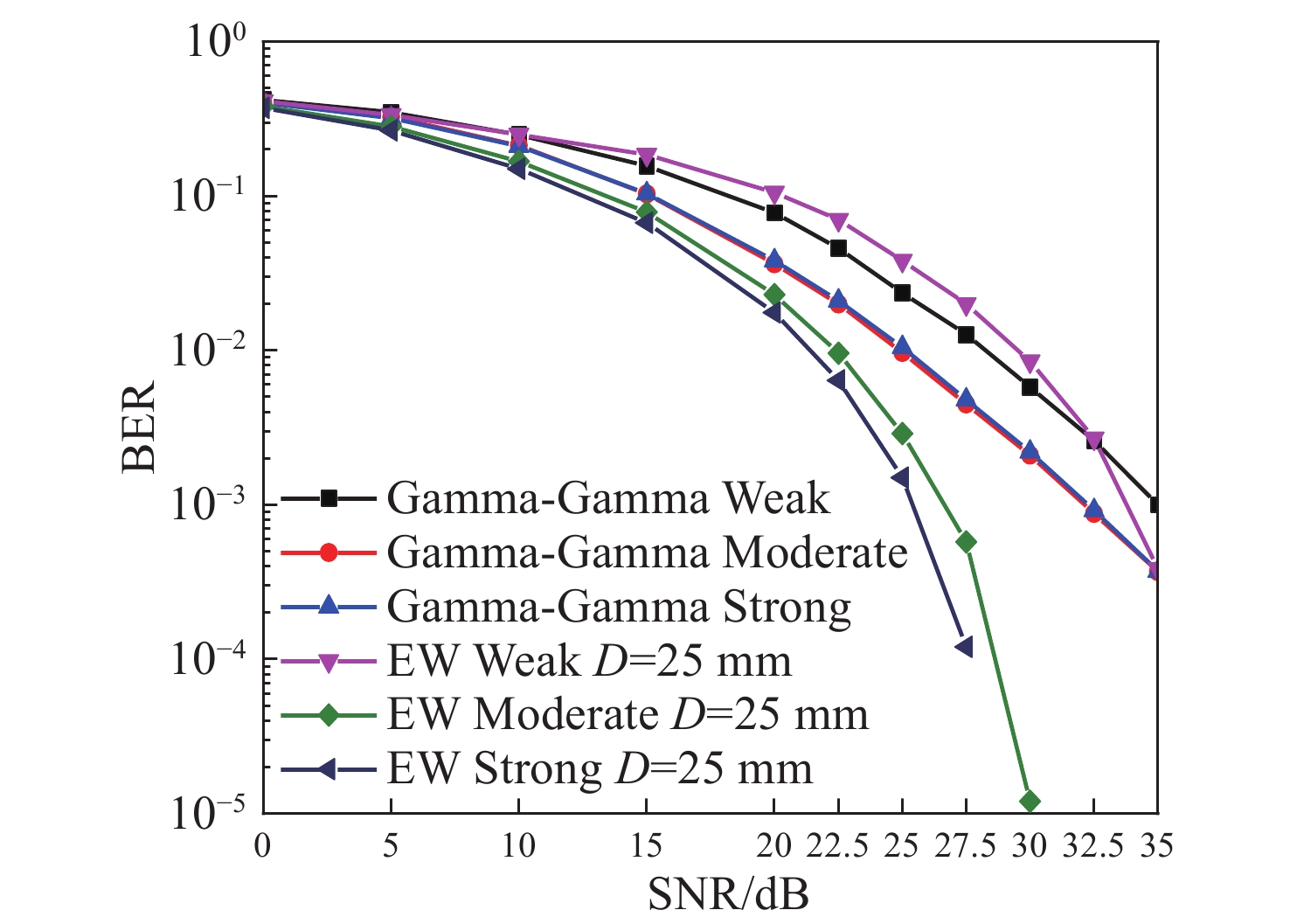
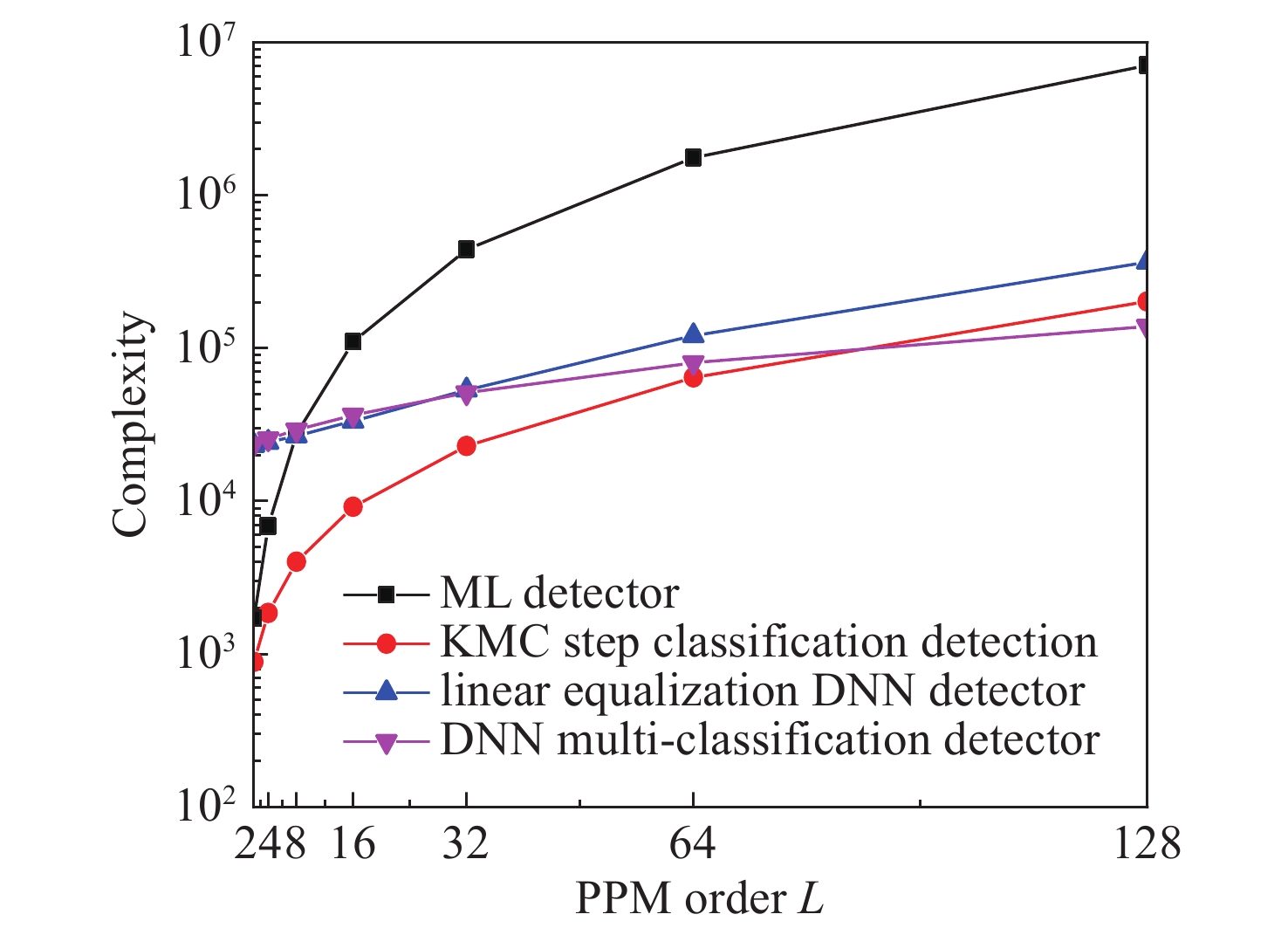
为有效避免最大似然(ML)检测复杂的计算过程,根据空间脉冲位置调制(SPPM)信号的特点,将深度神经网络(DNN)与分步检测相结合,提出了一种基于深度学习的SPPM多分类检测器。在该检测器中,利用DNN建立接收信号与PPM符号间的非线性关系,并以此为准则完成在线接收PPM符号的检测,从而有效避免了对PPM符号的穷搜索检测过程。结果表明,采用本文检测器后,SPPM系统在大幅降低检测复杂度的前提下,取得了近似最优的误比特性能,同时还克服了K均值聚类(KMC)分步分类检测所出现的错误平台效应。当PPM阶数为64时,本文方法较ML检测和线性均衡DNN检测器的计算复杂度分别降低了约95.45%、33.54%。

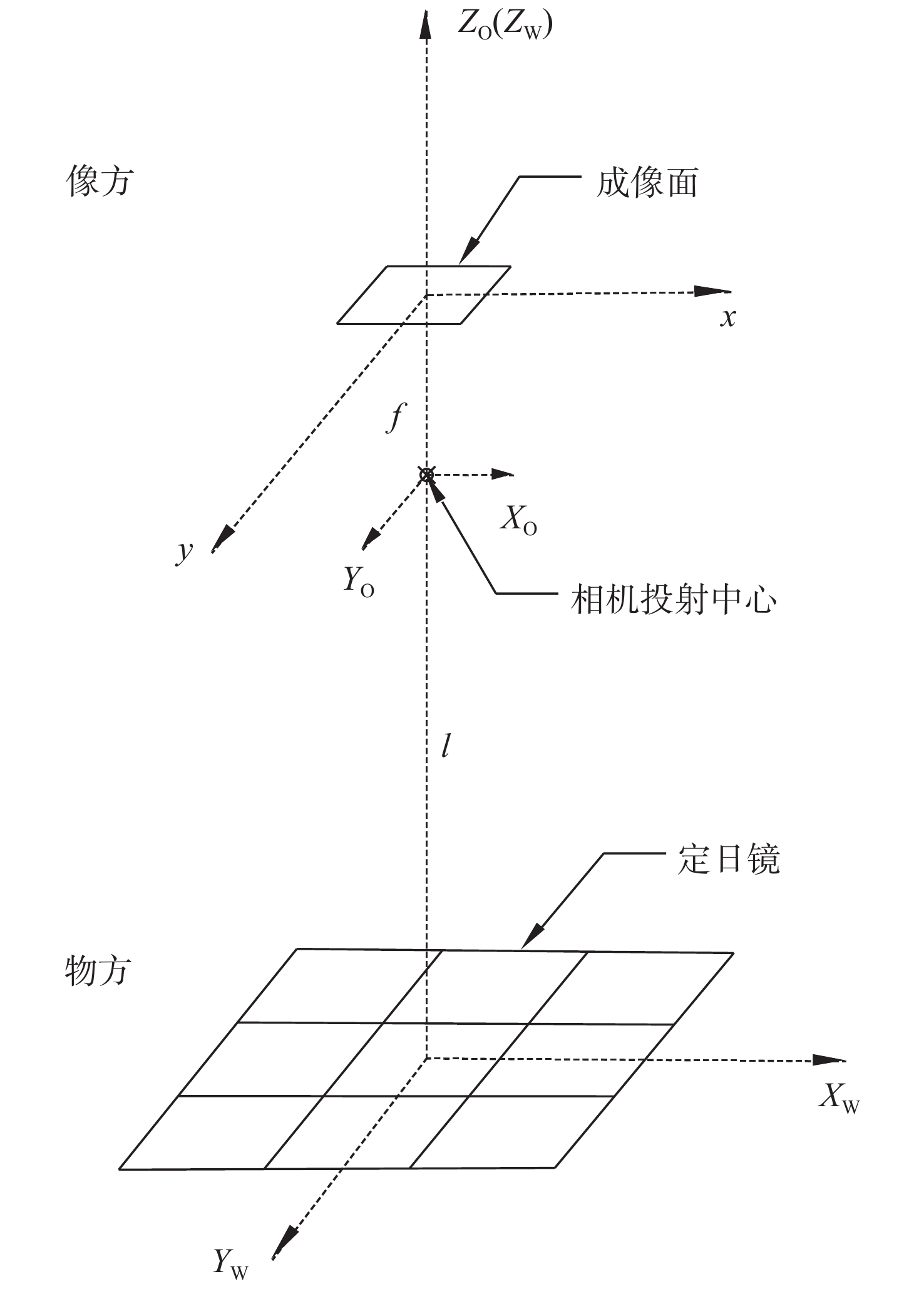
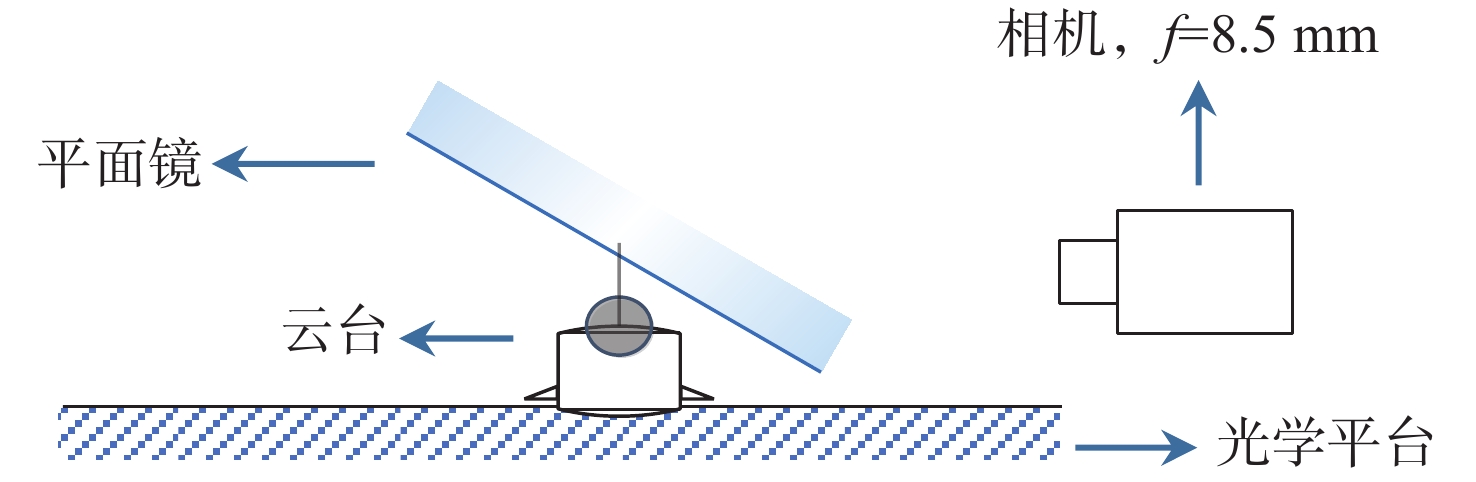
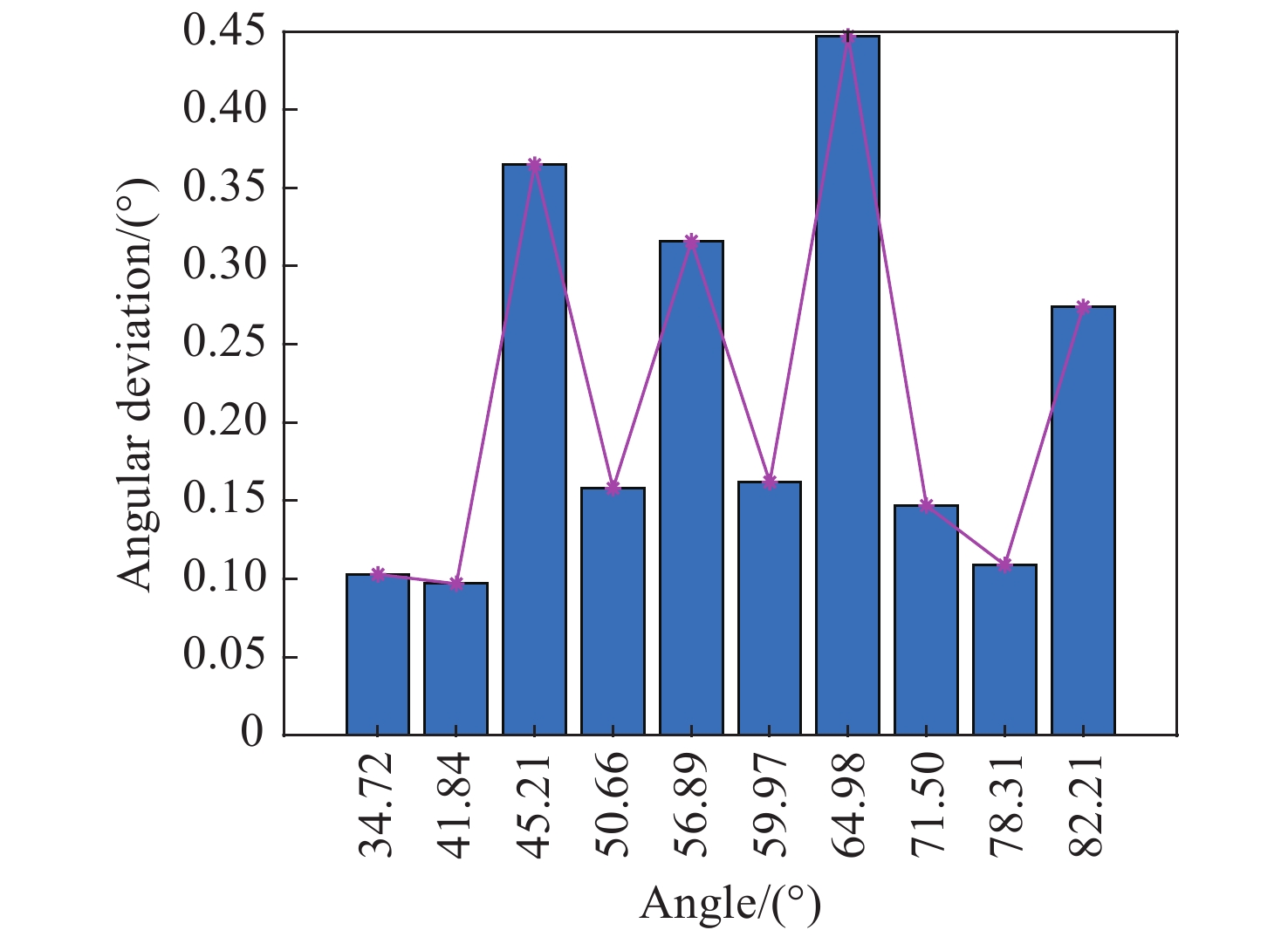
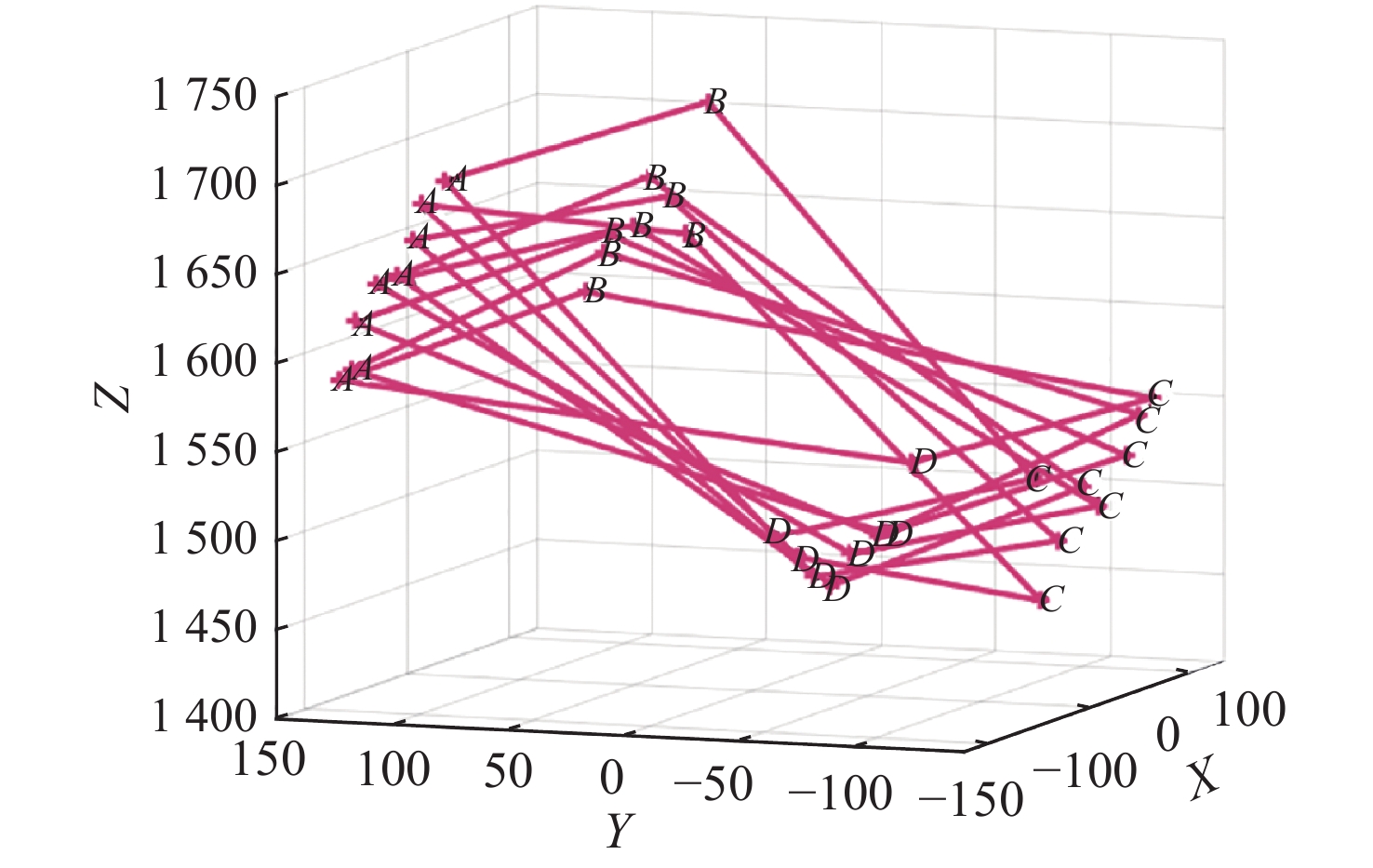
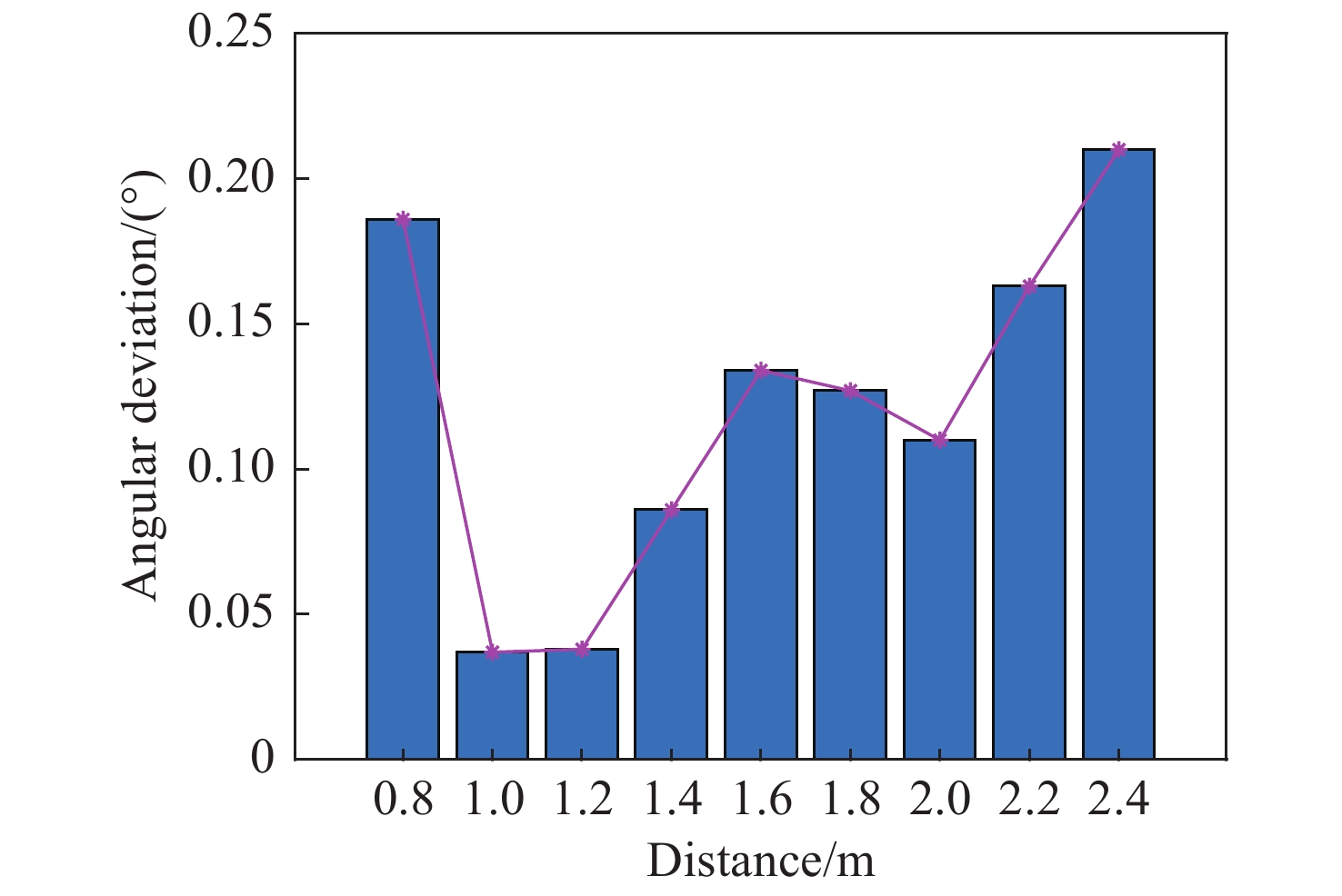
在塔式太阳能热发电中,定日镜面形误差对镜场光学效率具有重要影响,因此需要对定日镜面形误差进行检测。定日镜一般由多个子镜拼接而成,子镜的倾斜角度误差是定日镜面形误差的重要组成部分。本文提出一种基于摄影测量的定日镜子镜倾斜角度误差的检测方法,即在已知定日镜子镜外形尺寸的条件下,利用摄影成像原理计算出定日镜子镜4个角点的空间位置坐标,进而求出子镜的法线方向,再利用所求得的法线计算出子镜的倾斜角度,最终实现对定日镜子镜倾斜角度误差的检测。本文详细阐述了该方法的测量原理,推导了计算公式,并利用平面镜与相机进行了相关验证实验。通过在不同距离下对不同倾斜角度的平面镜进行测量实验,得出测量镜面倾斜角度与实际倾斜角度的偏差约为0.1°~0.3°,实验结果表明:该方法能够较准确地检测定日镜子镜的倾斜角度误差,验证了该方法的正确性和可行性。





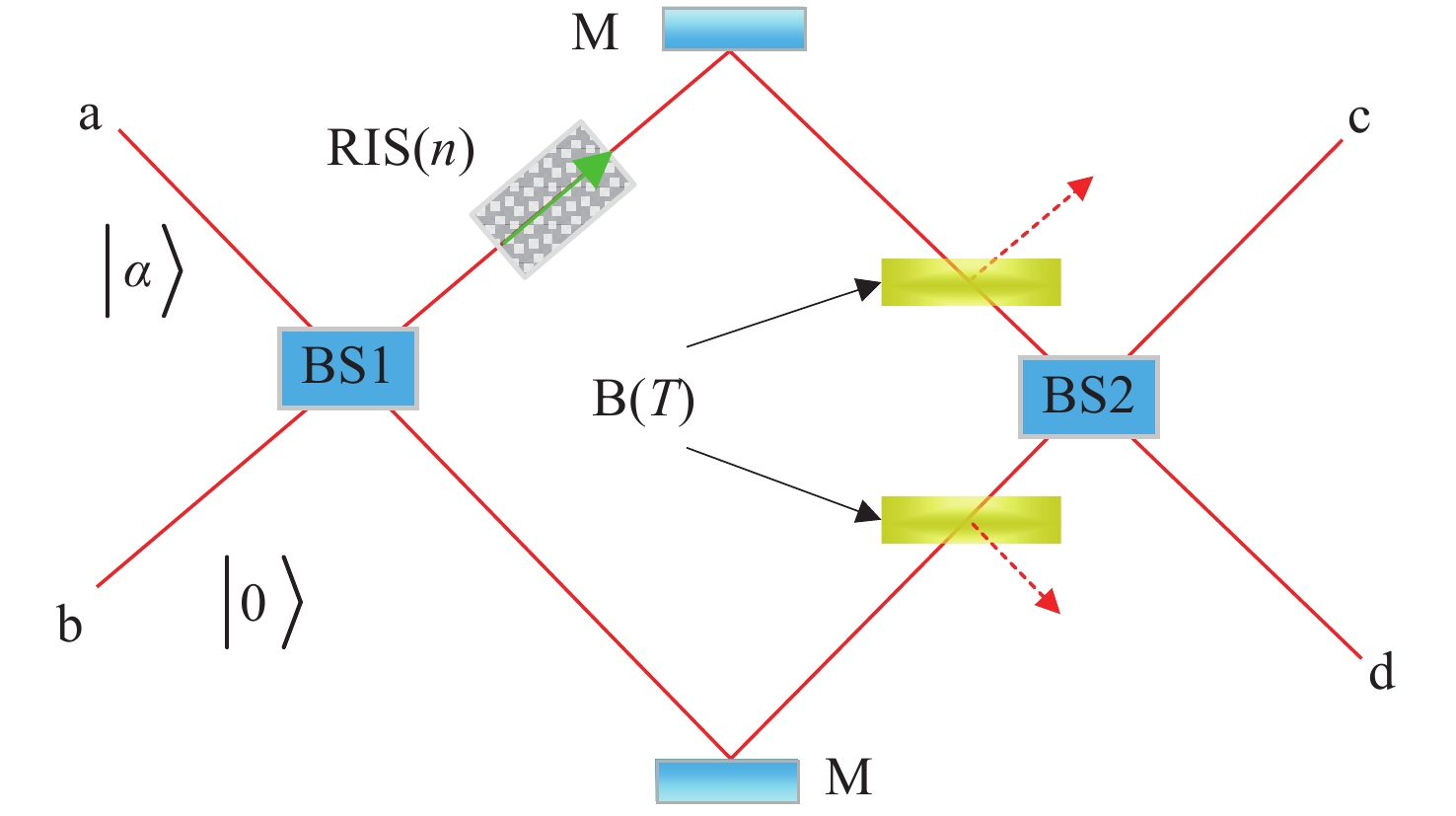
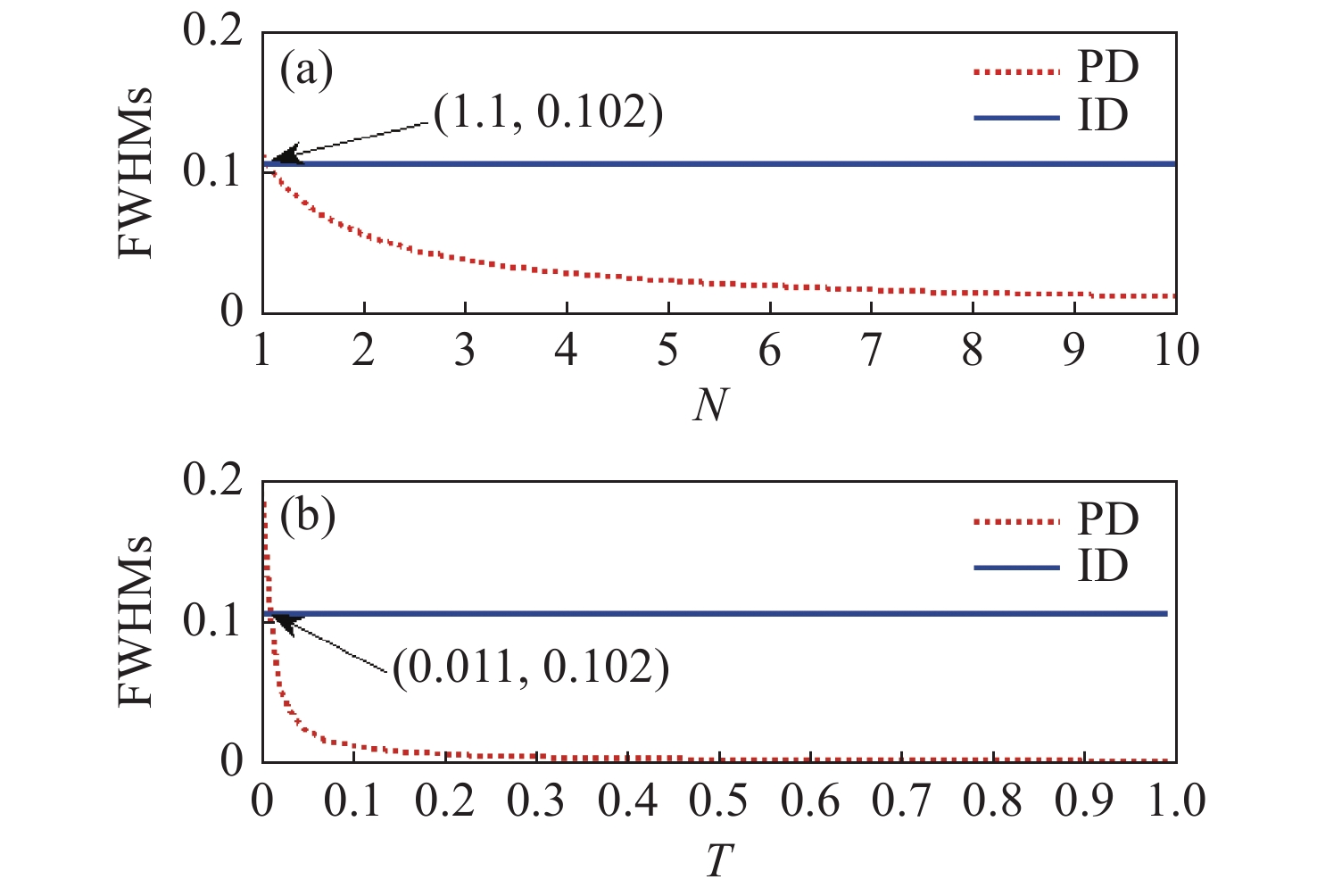
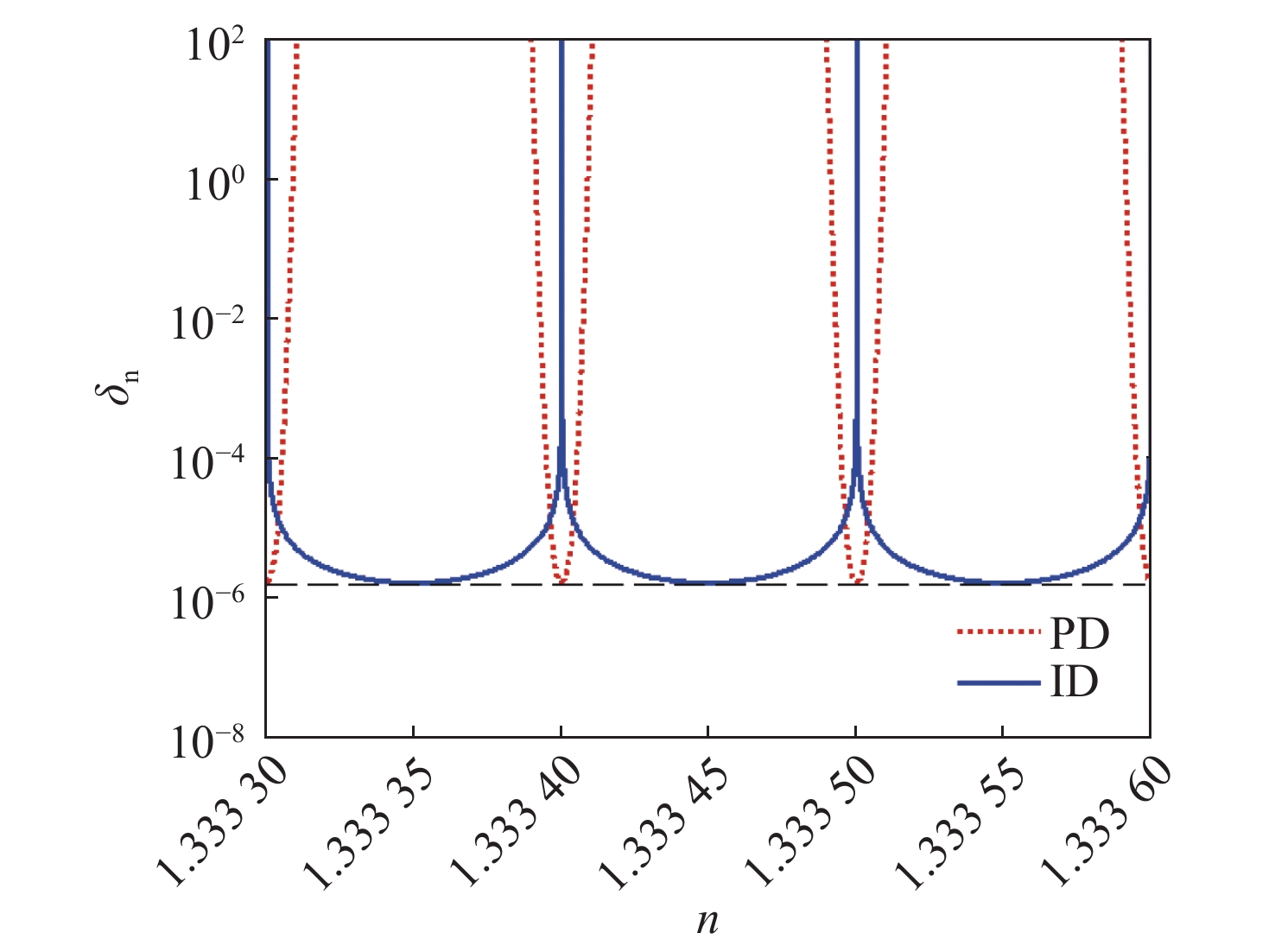
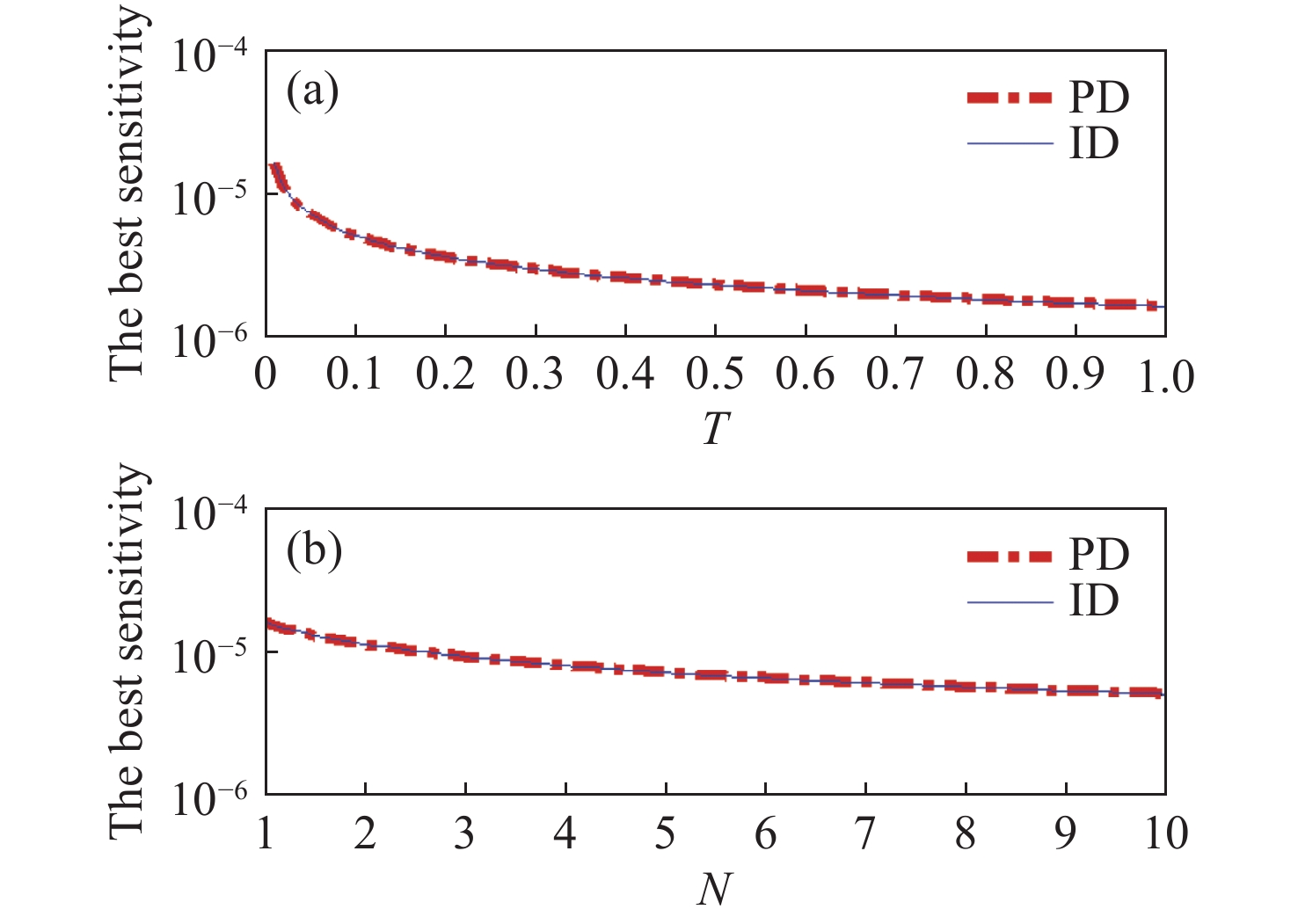
传统波动光学法测量样品折射率所采用的探测方法主要是强度探测和波长探测。波长的最佳检测器件为干涉型光谱仪,干涉型光谱仪是通过光功率计测量信号强度、分析条纹数目变化及所对应的光程差,进而计算出信号光波长,因此,其本质仍是以强度探测为基础的。然而,利用强度探测干涉信号,分辨率受经典衍射极限限制,很难得到进一步提升。为了解决这一瓶颈问题,本文提出利用奇偶探测突破经典分辨率的极限限制,实现超分辨率折射率测量。根据量子探测与估计理论,推导了奇偶探测和强度探测折射率测量信号及其灵敏度表达式,并进行了数值对比分析。同时,研究了损耗对系统输出信号分辨率和灵敏度的影响。数值结果表明:奇偶探测分辨率是强度探测的




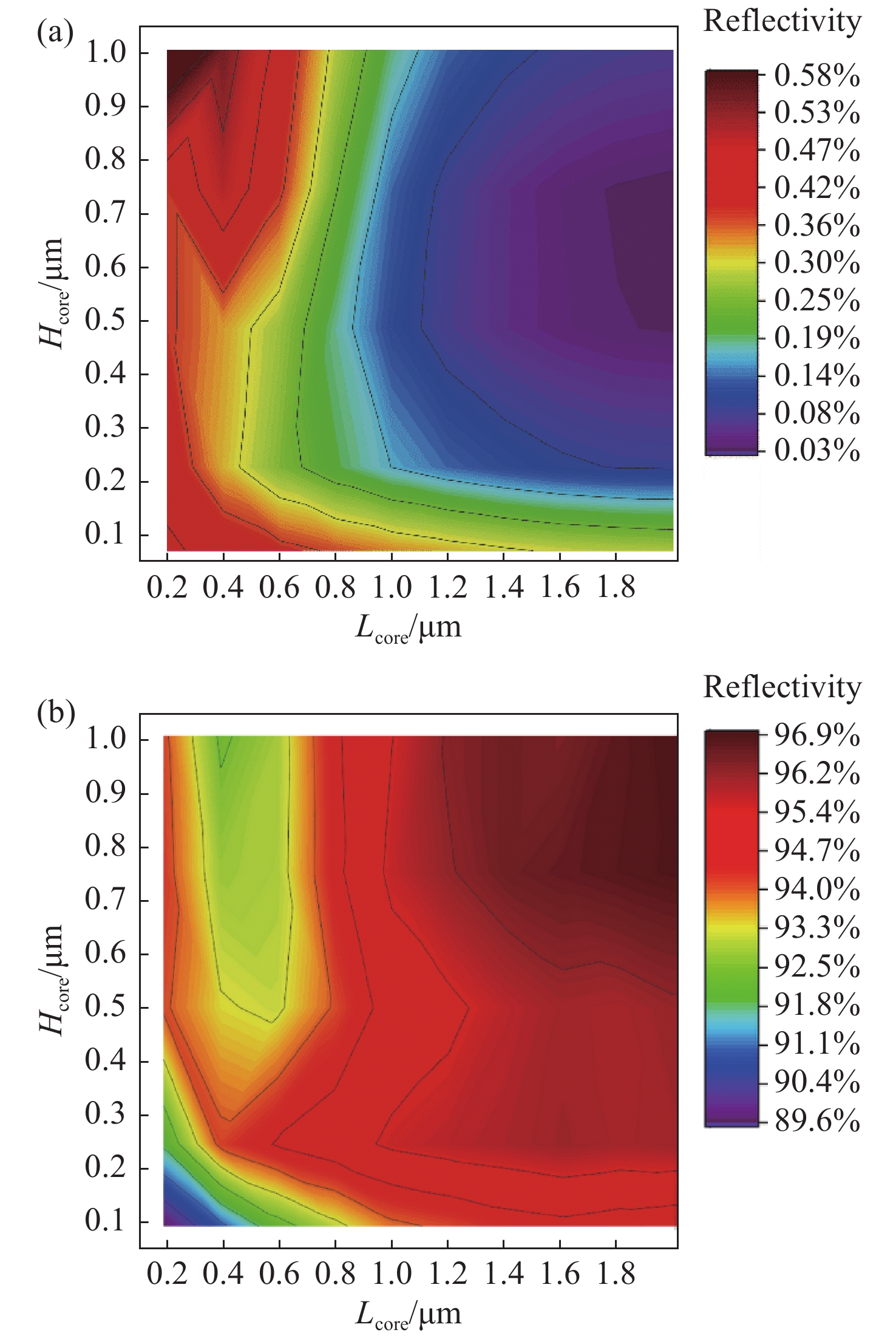
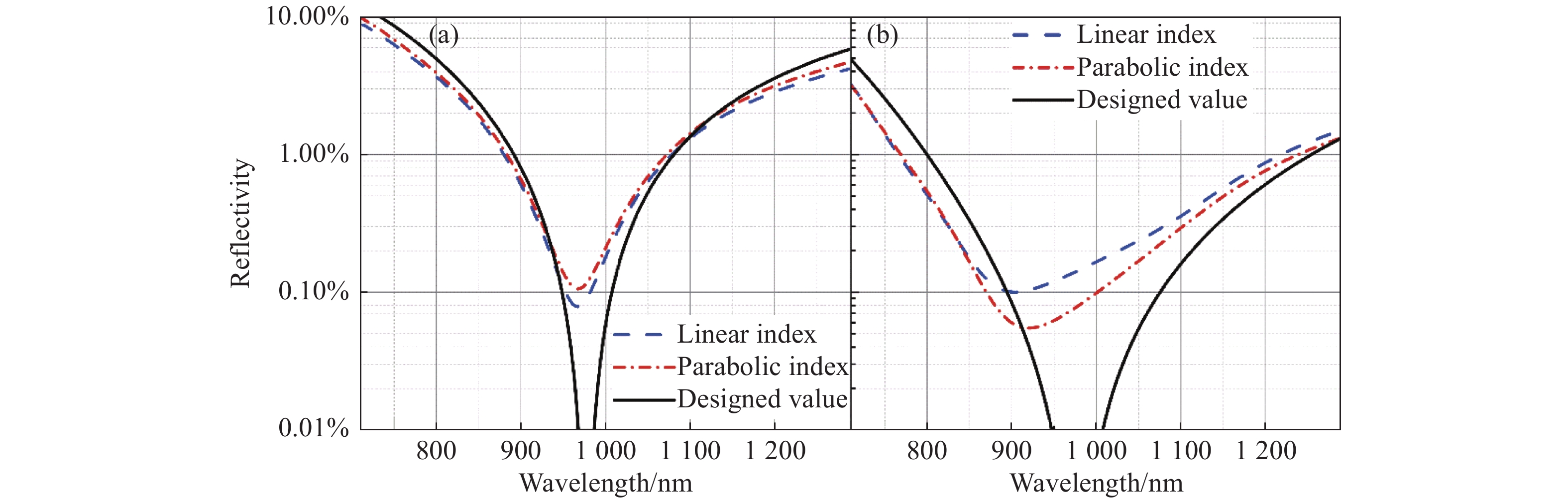
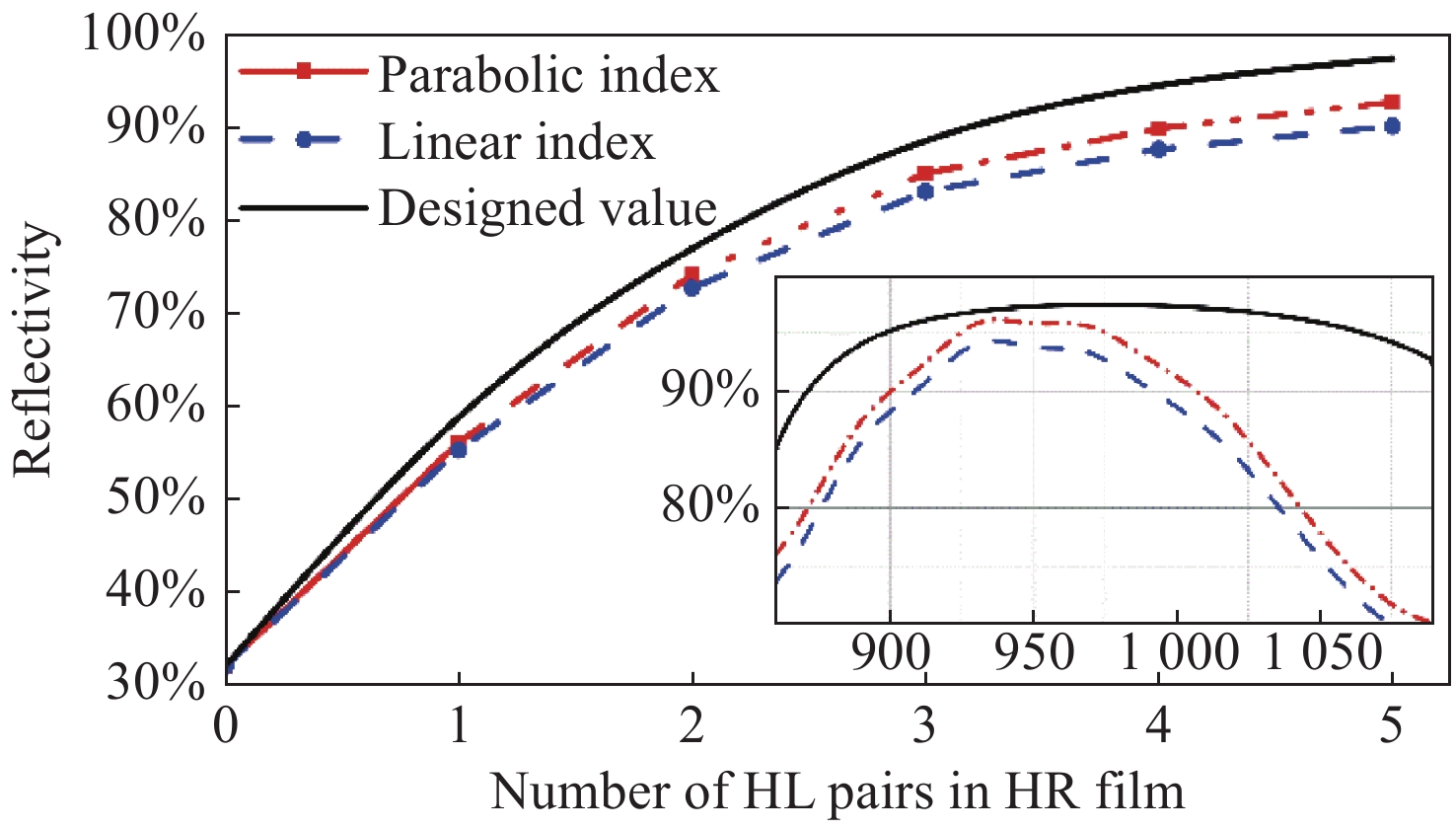
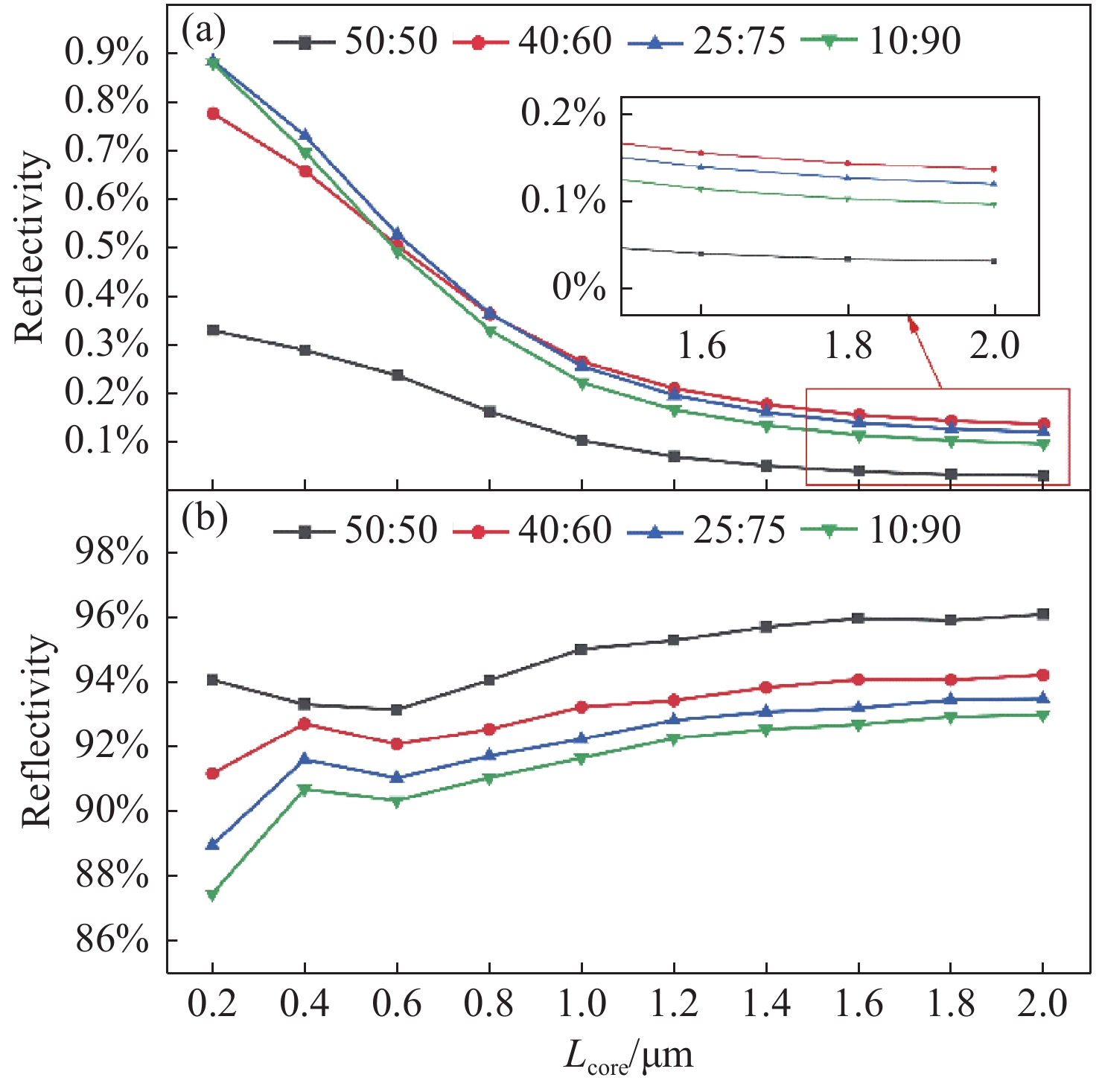
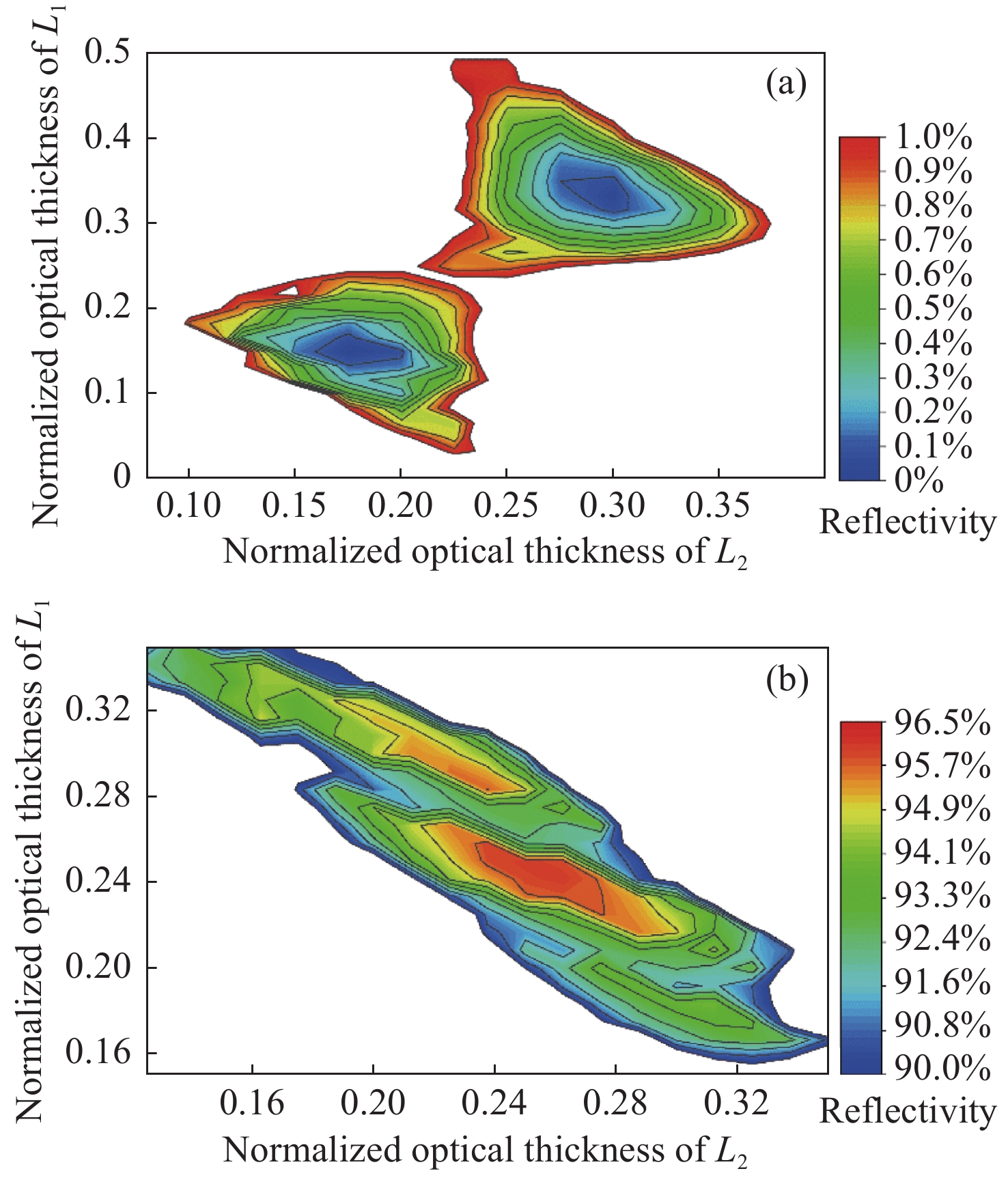
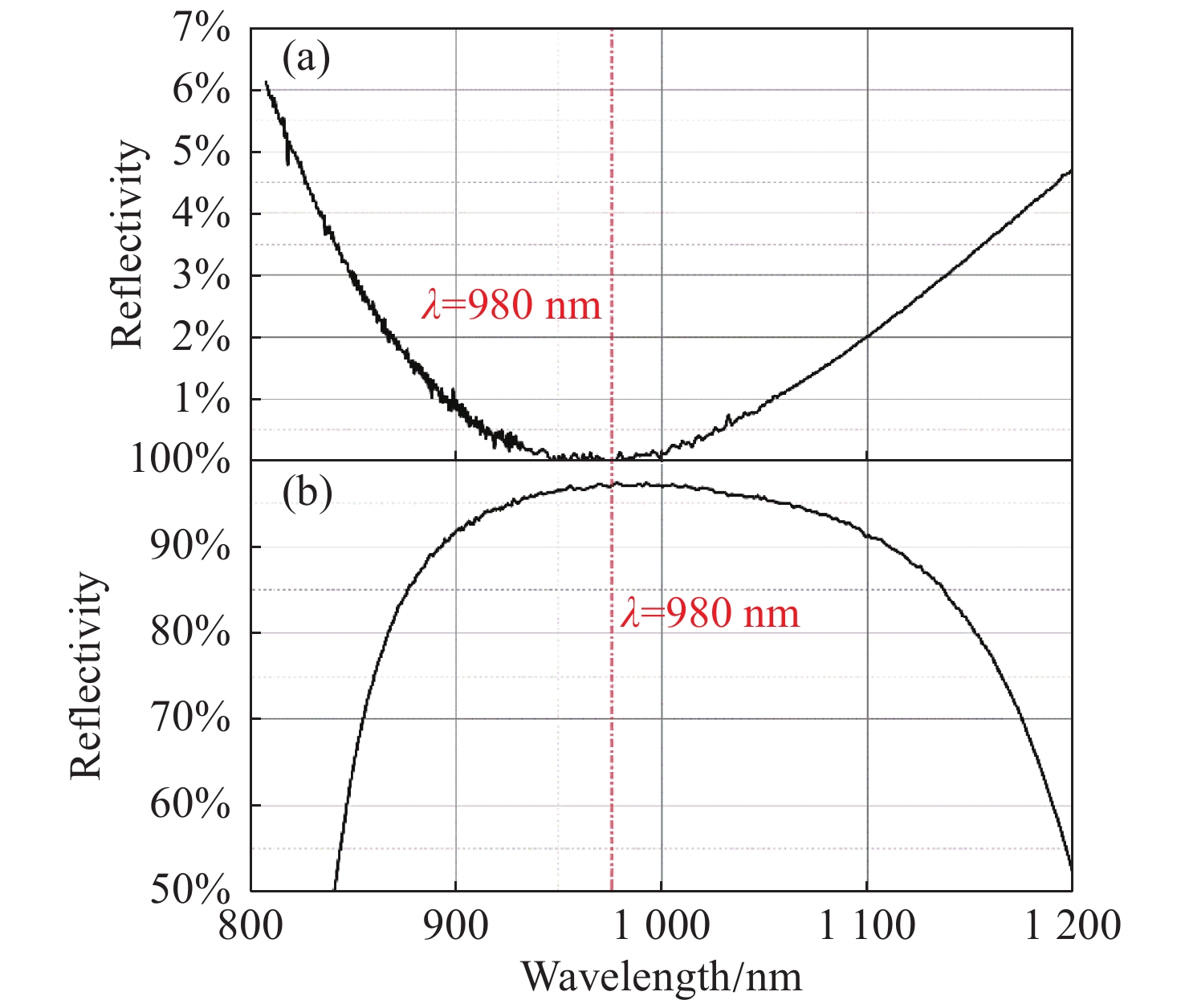
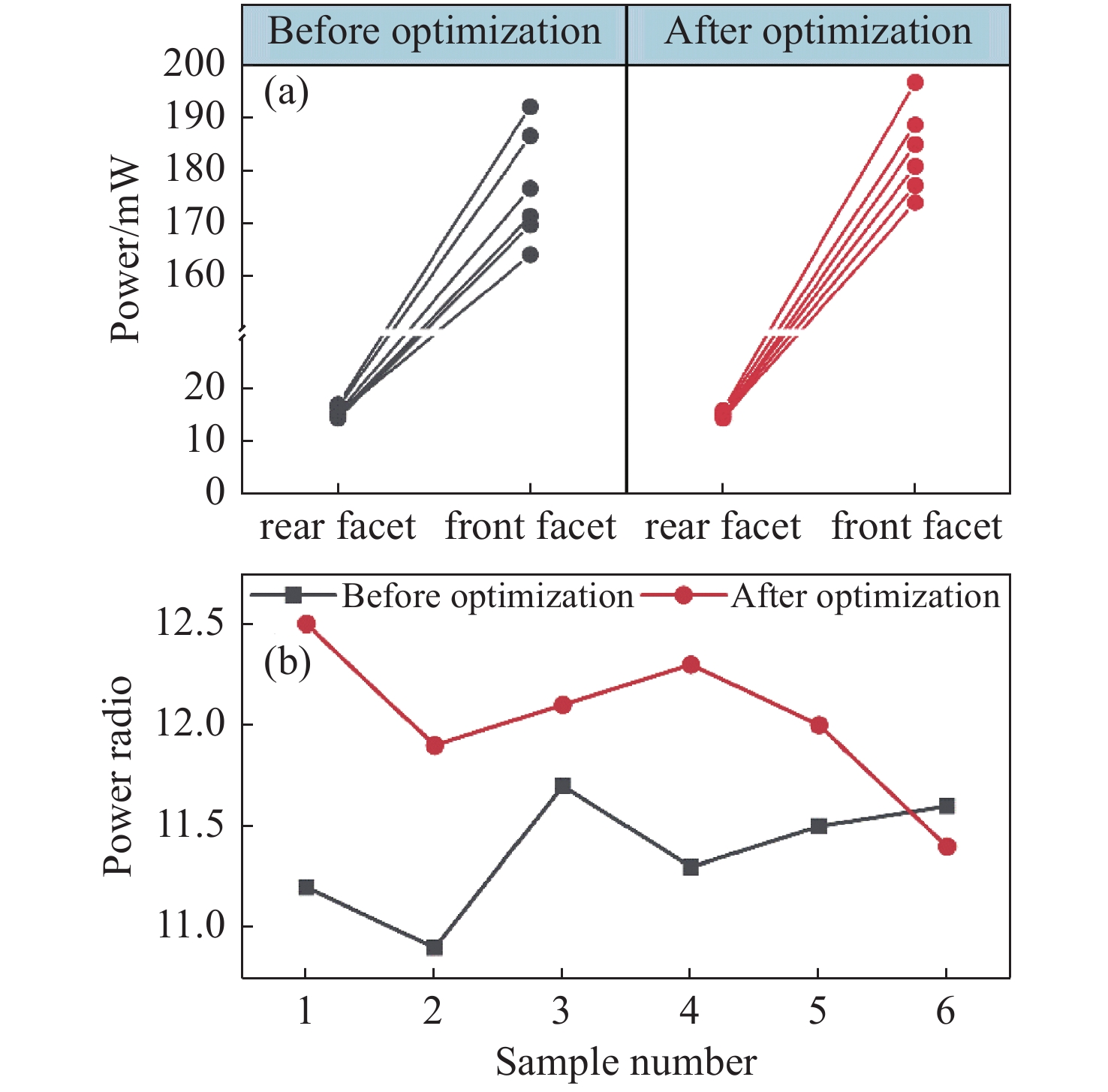
腔面光学薄膜是光纤光栅外腔激光器(ECL)的关键结构,平面波方法(PWM)被广泛应用于腔面光学薄膜的设计,然而该设计在ECL中的实际应用效果往往并不理想。本文在使用PWM方法时通过时域有限差分法分析其中的原因,并考虑腔面尺寸和结构影响。仿真结果显示,PWM设计存在反射率差和反射曲线偏移等问题,实际的反射特性显著偏离设计值。因此本文重点优化了薄膜设计,并采用磁控溅射工艺镀膜。测量结果显示,优化后增透膜的反射率降低了30%,高反膜反射率增至96%以上,所制备的ECL的光纤输出功率超过650 mW。本文研究结果为ECL和其他半导体光电子器件的腔面光学薄膜研制提供了参考。



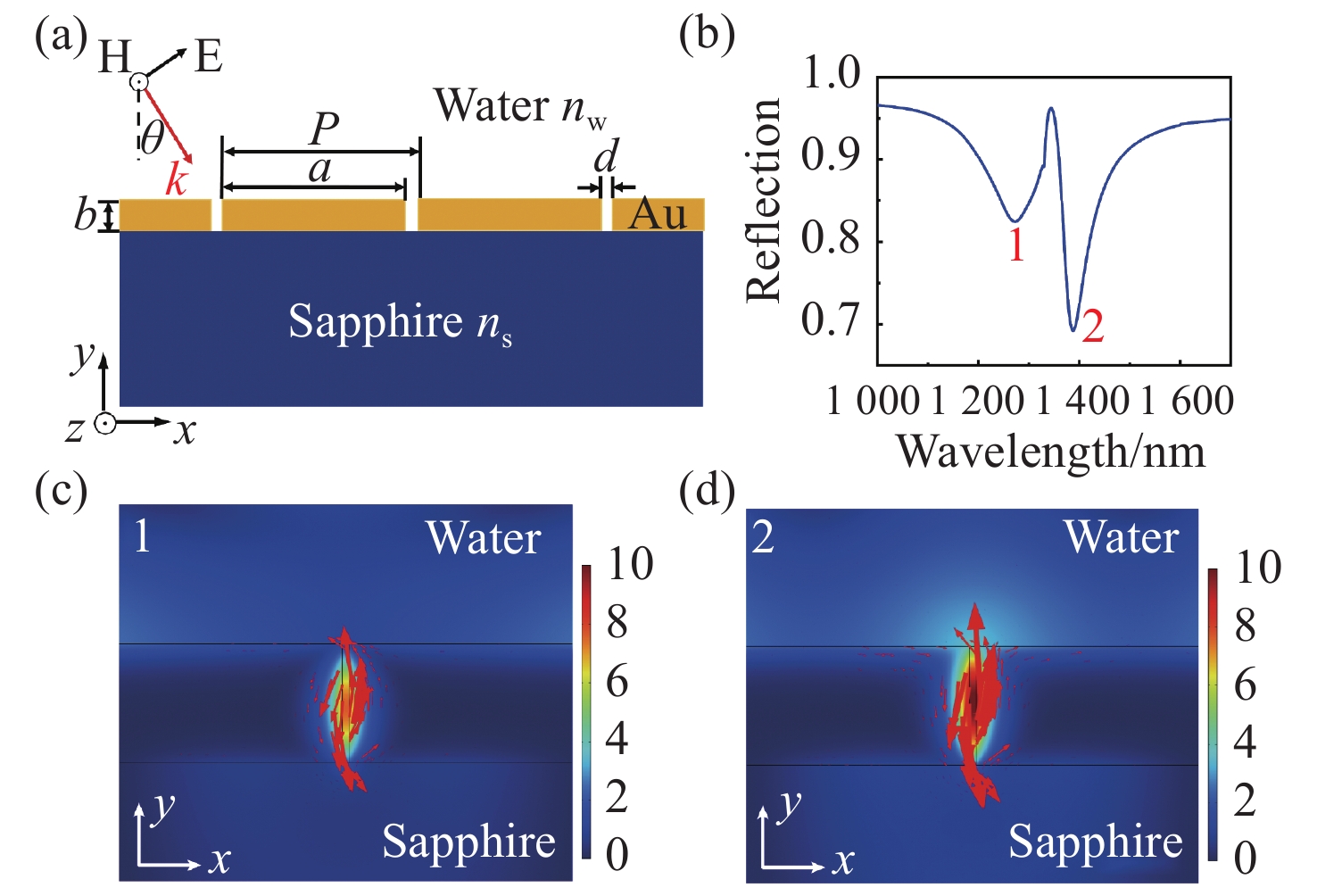
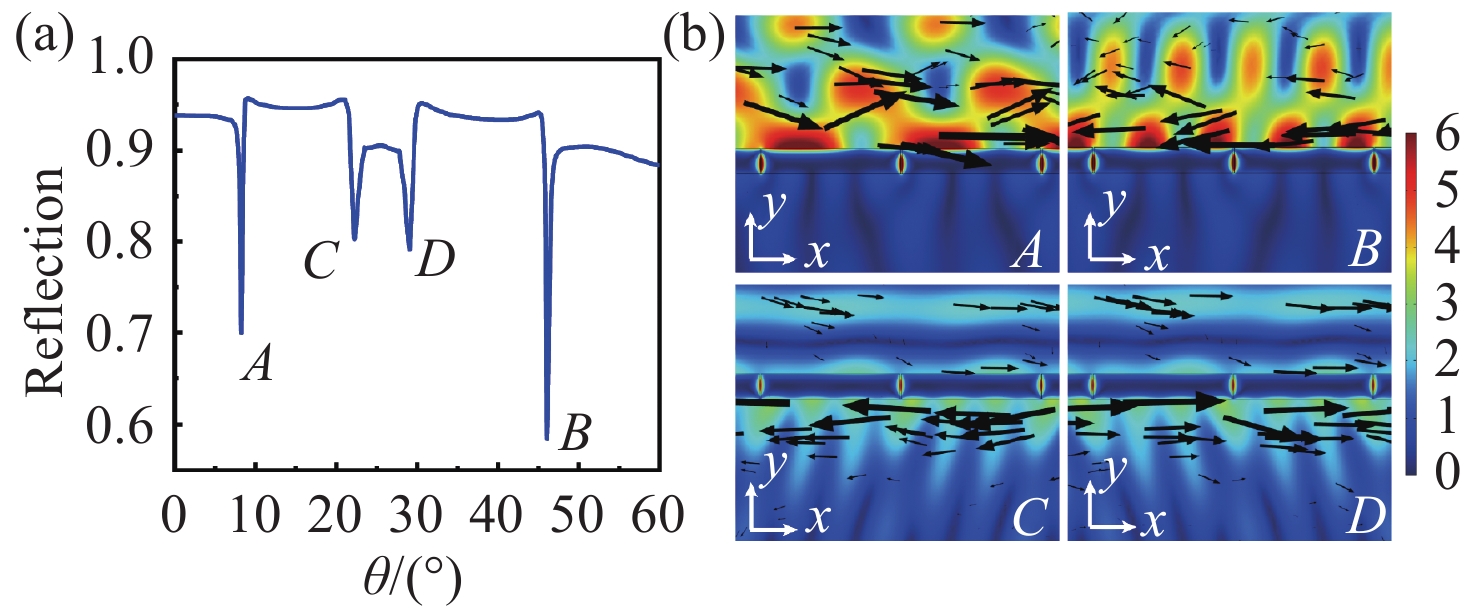
本文研究了一维金属纳米狭缝阵列中磁表面等离激元的相干现象,并提出了一种双谷传感方法以提高灵敏度。与通常所采用的固定入射角度进行波长扫描的方式不同,本文采用固定波长改变入射角度的方式研究表面等离激元的相干现象。由于延迟效应的存在,随着周围介质折射率的变化,两个谷会向相反的方向移动。相比于使用单一谷进行标定的方式,两个相反方向移动的谷可以有效提高灵敏度。用于标定的两个谷单独的灵敏度最大分别为39.2°/RIU和102.4°/RIU,而双谷标定的总灵敏度可达141.6°/RIU。此外,狭缝介质与上层介质的折射率不一致对传感性能的影响很小,故其有广泛的应用前景。




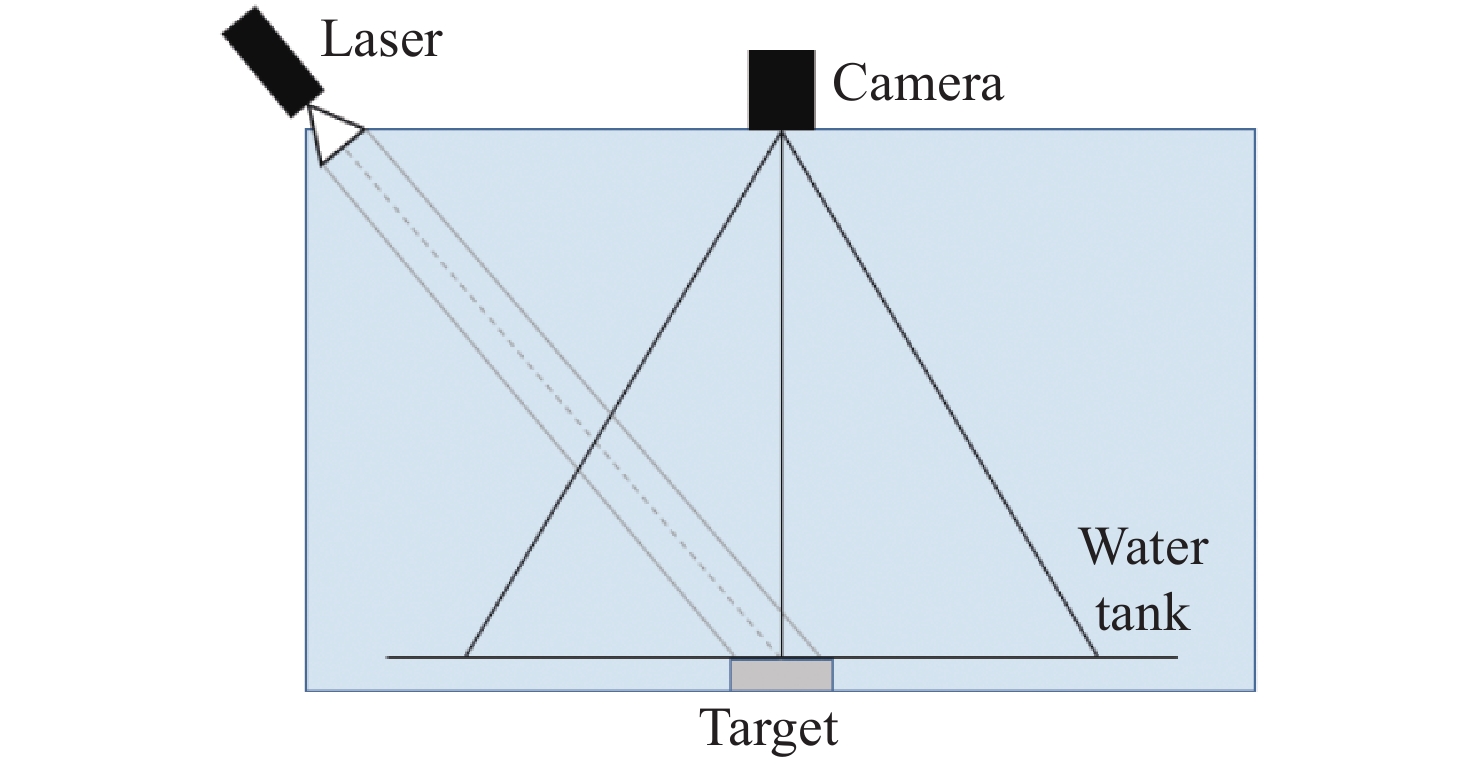
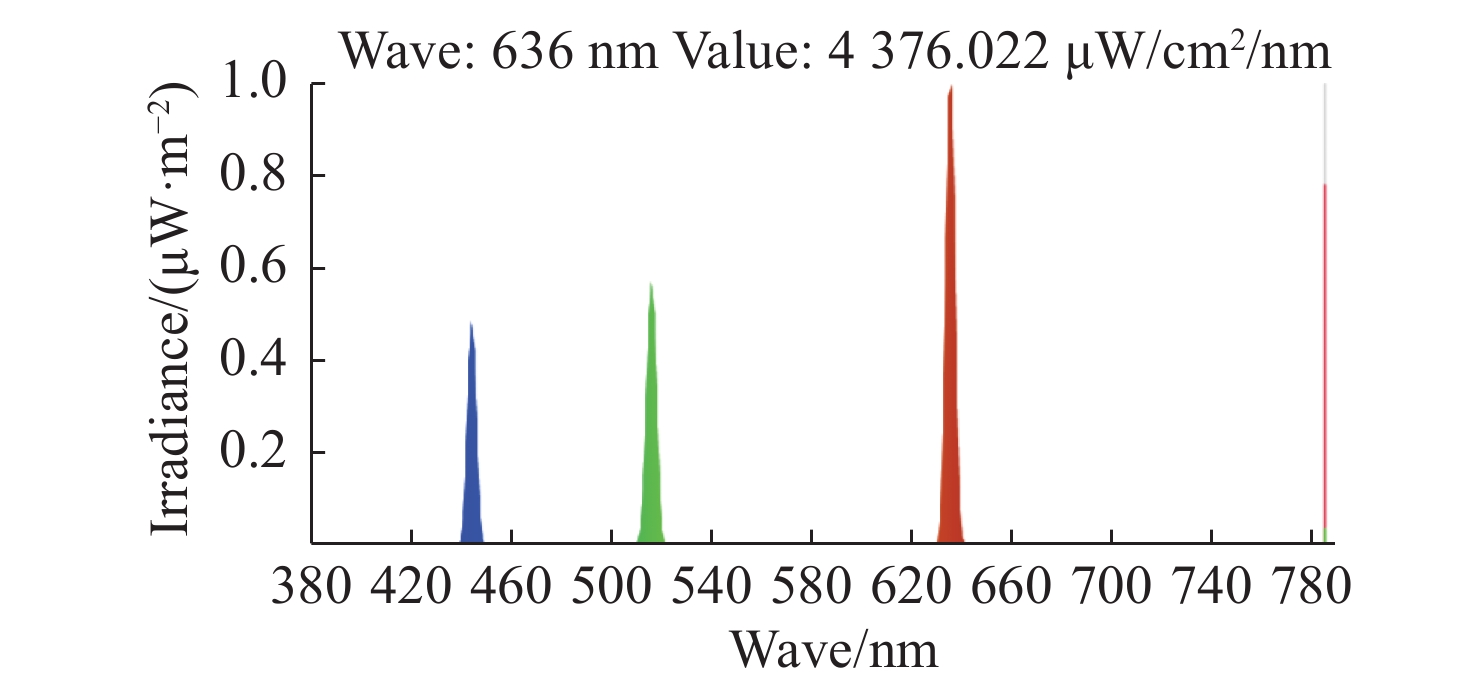
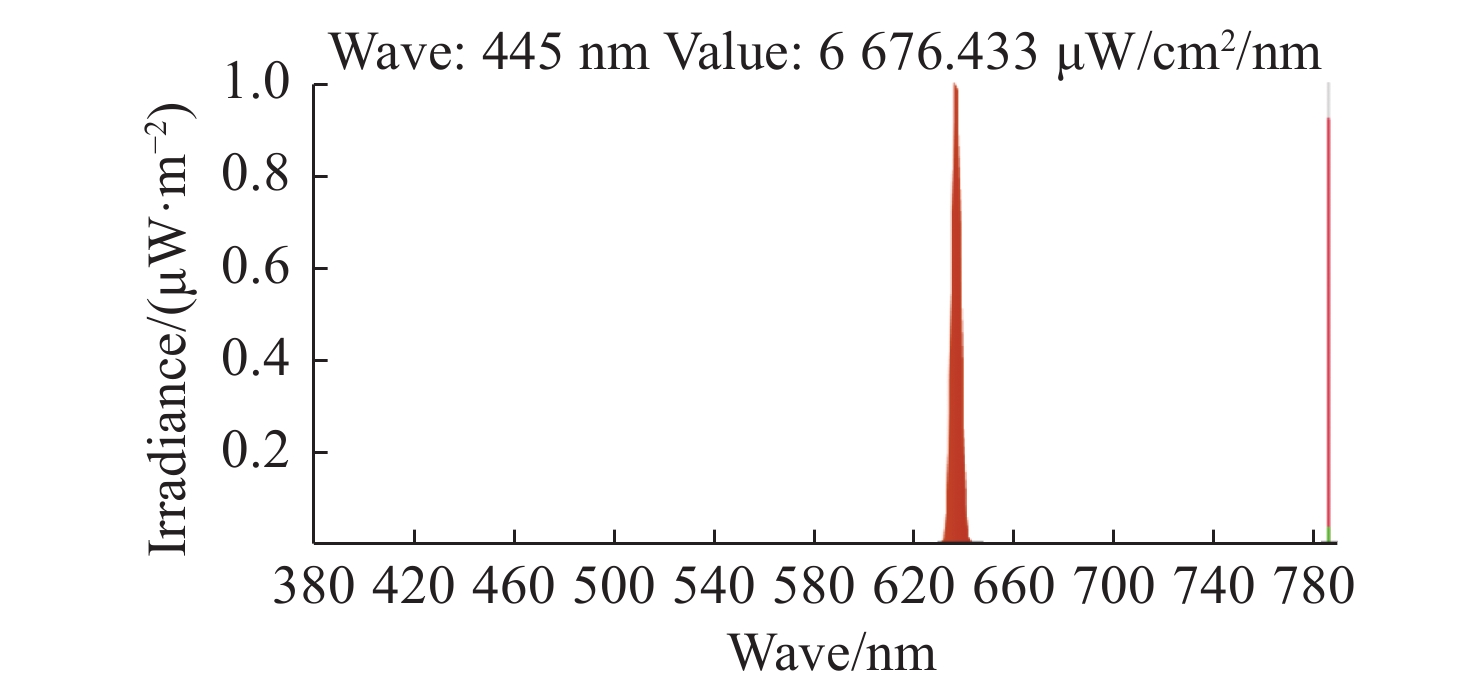
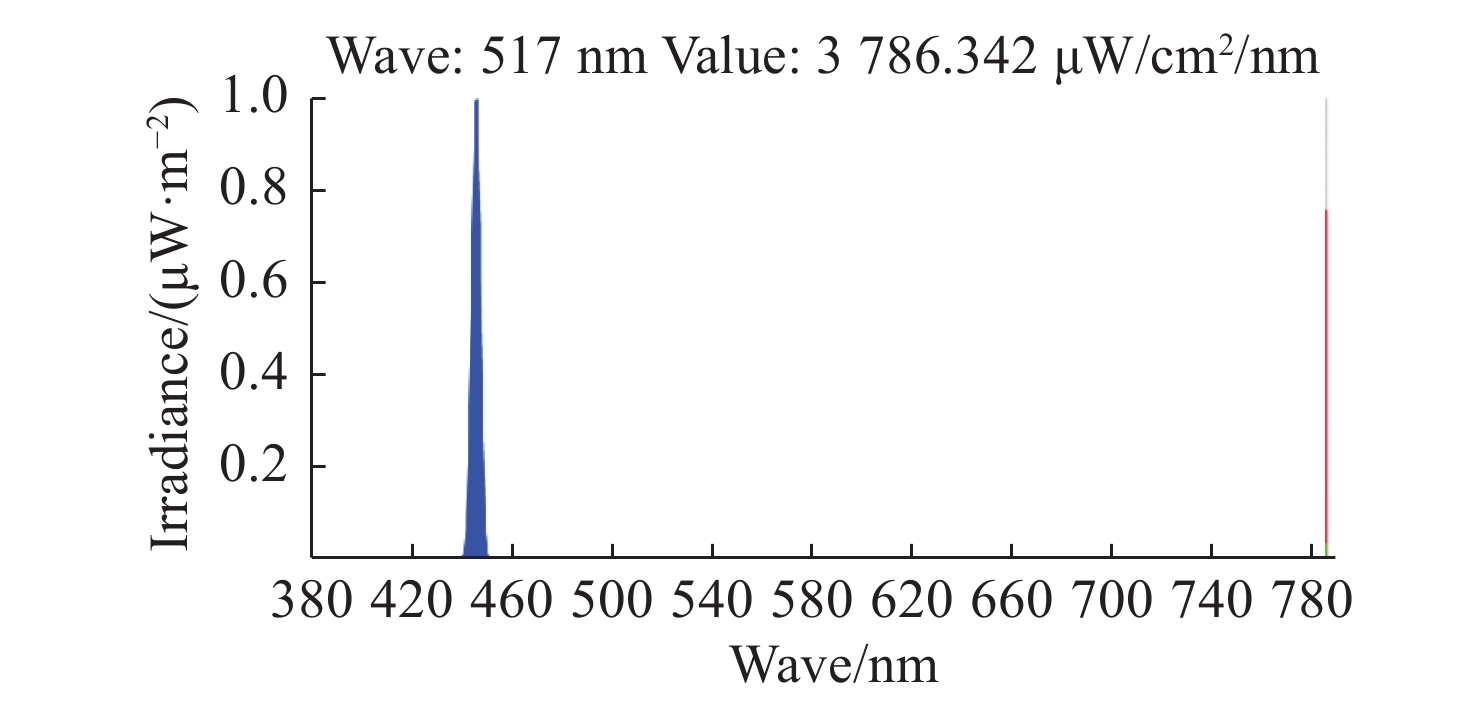
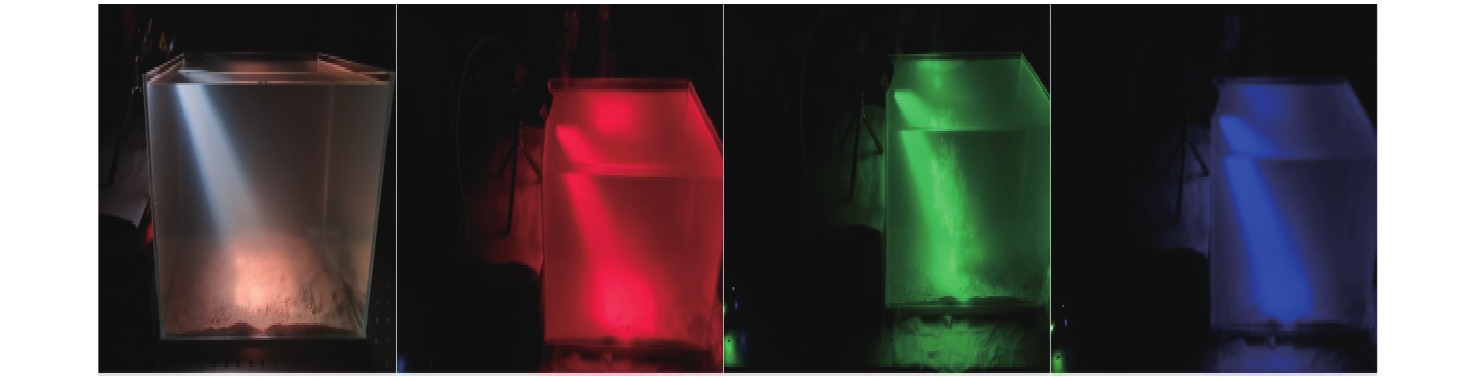
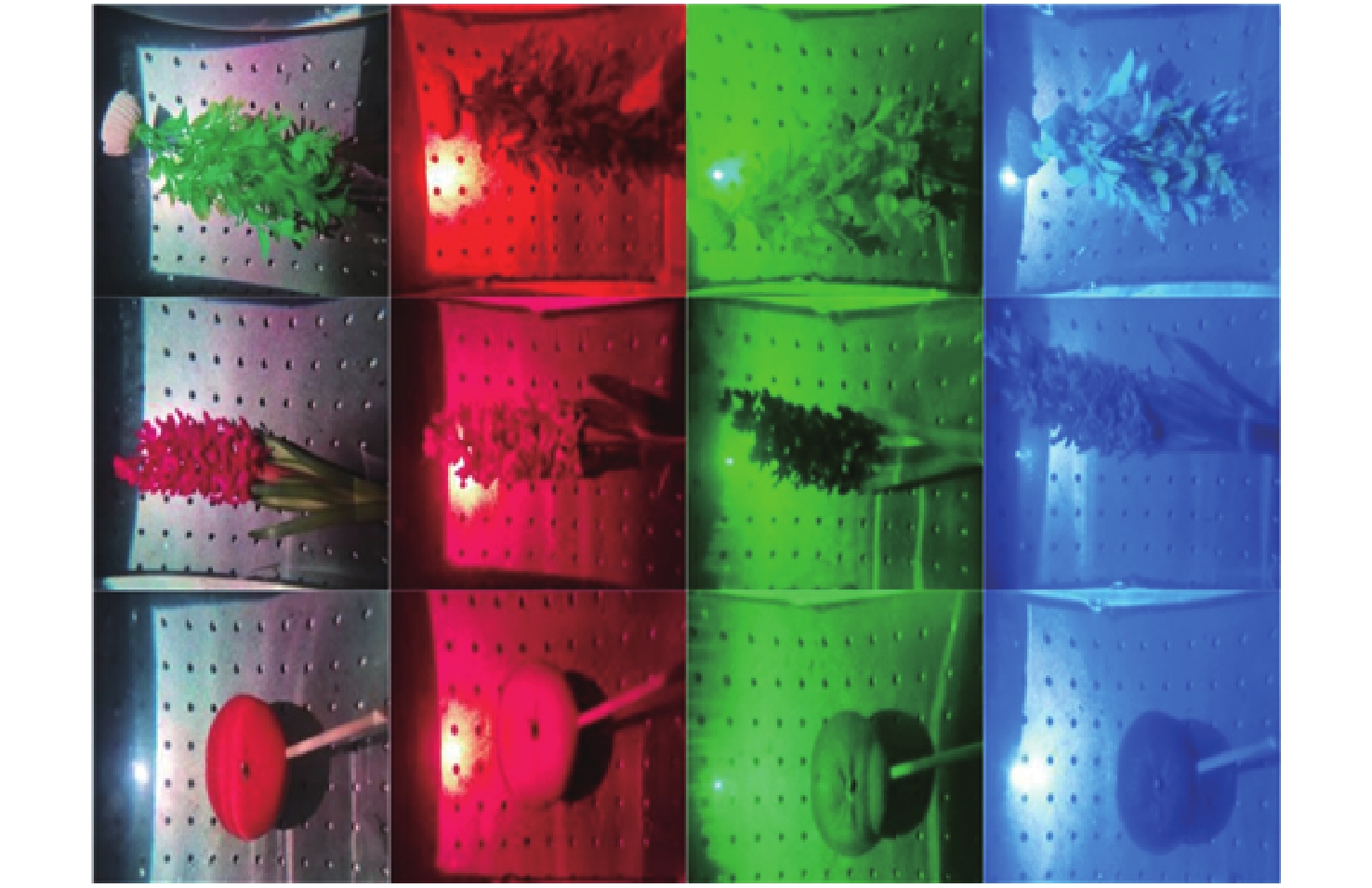
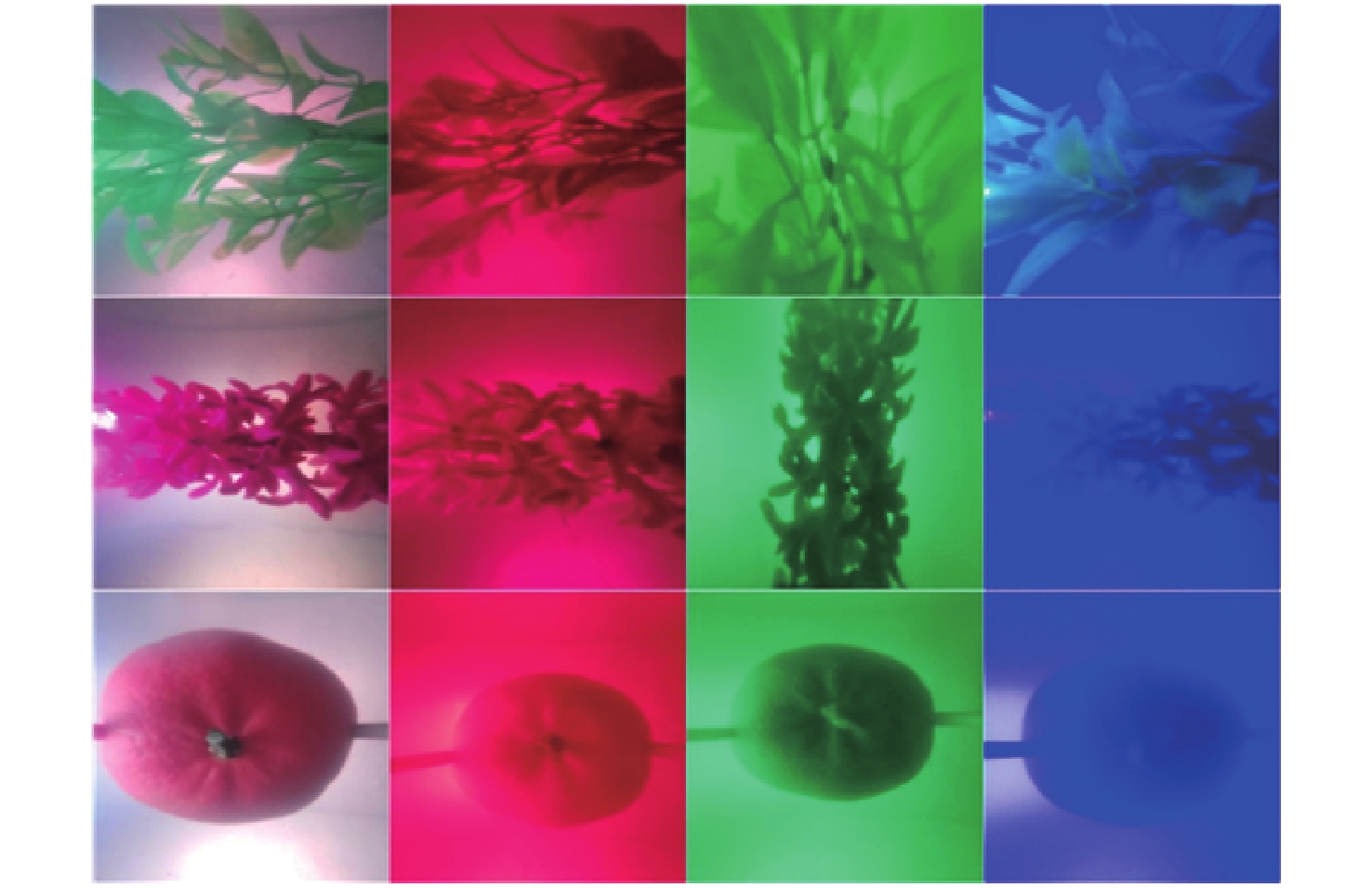
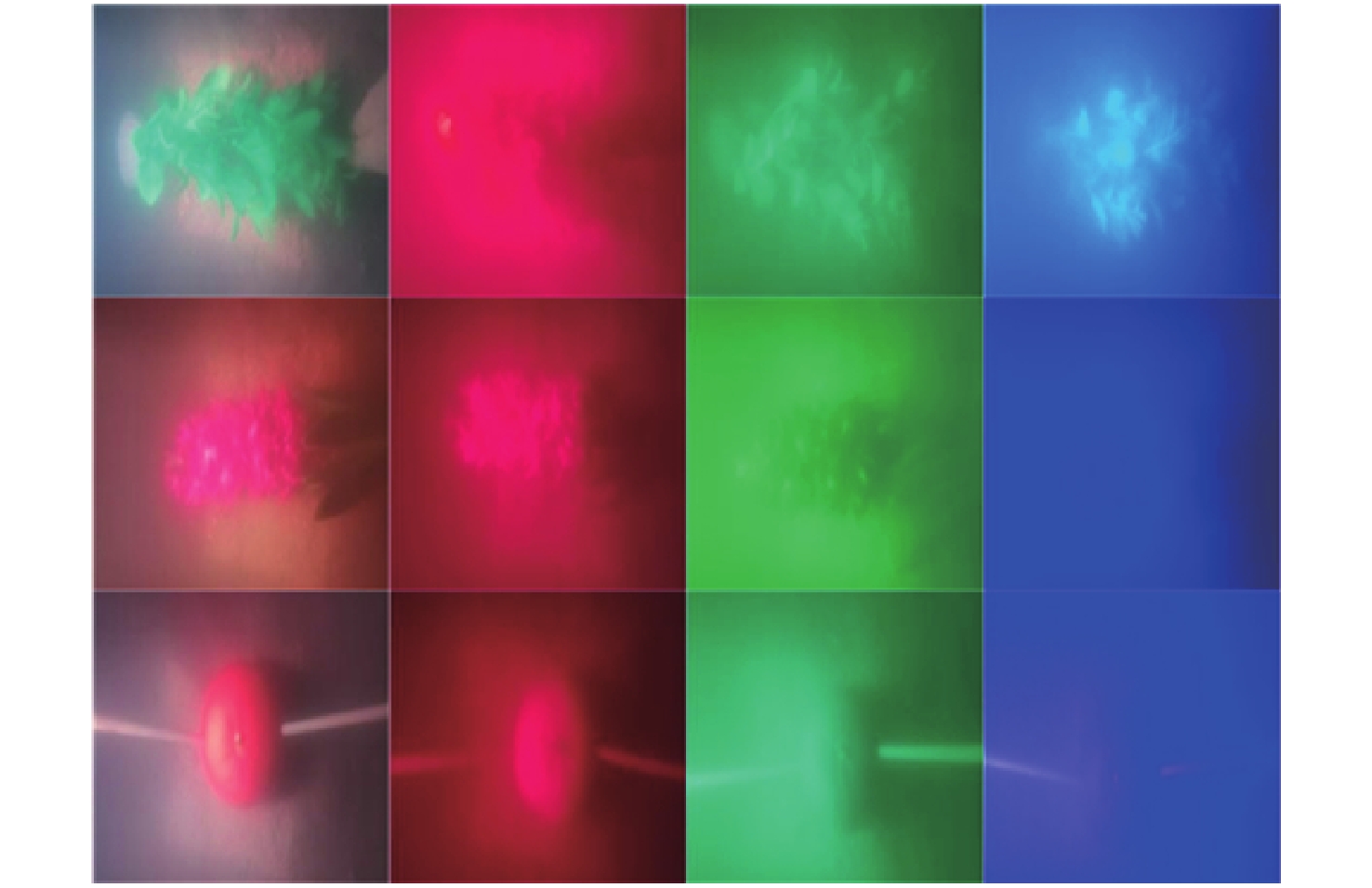
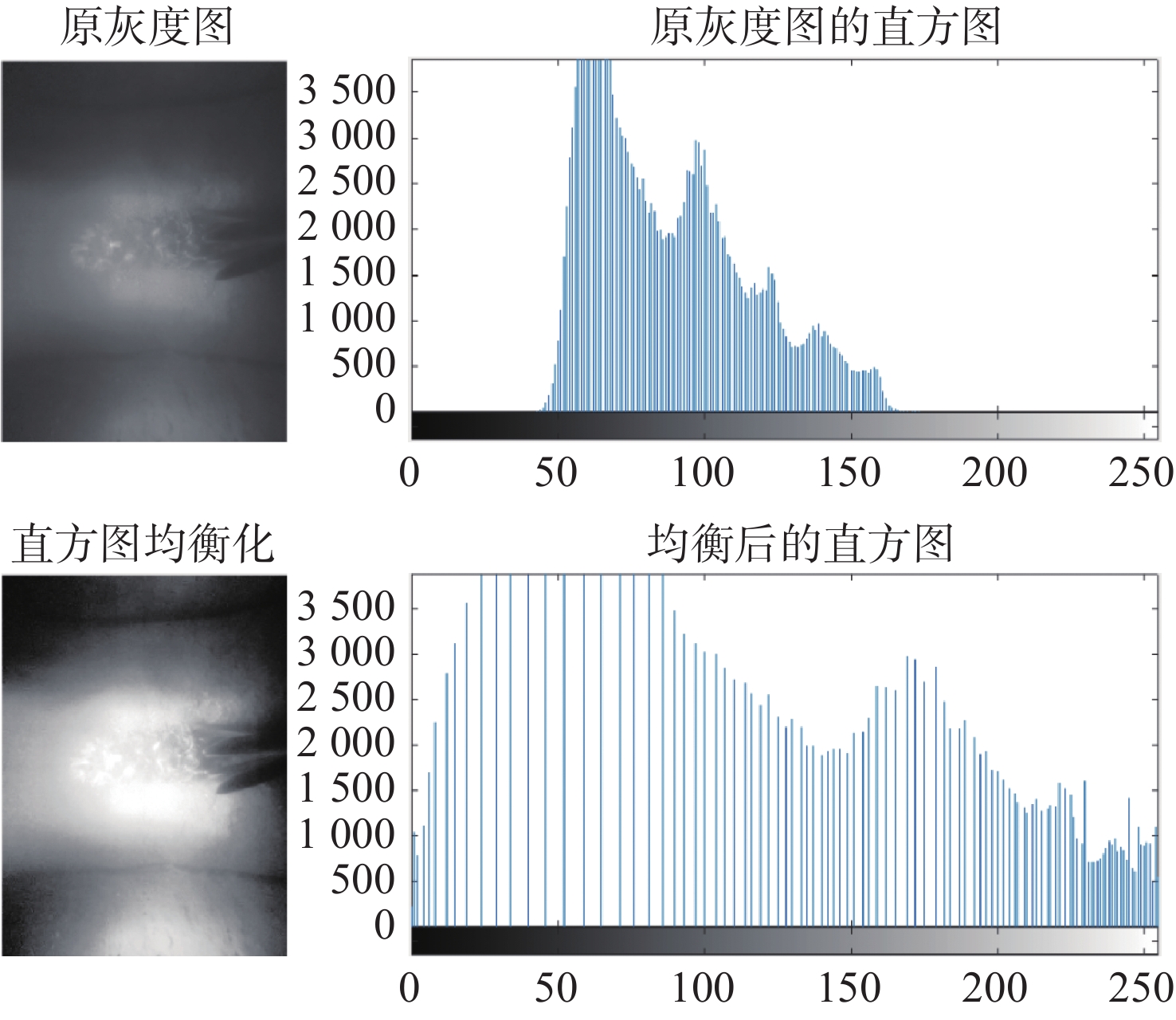
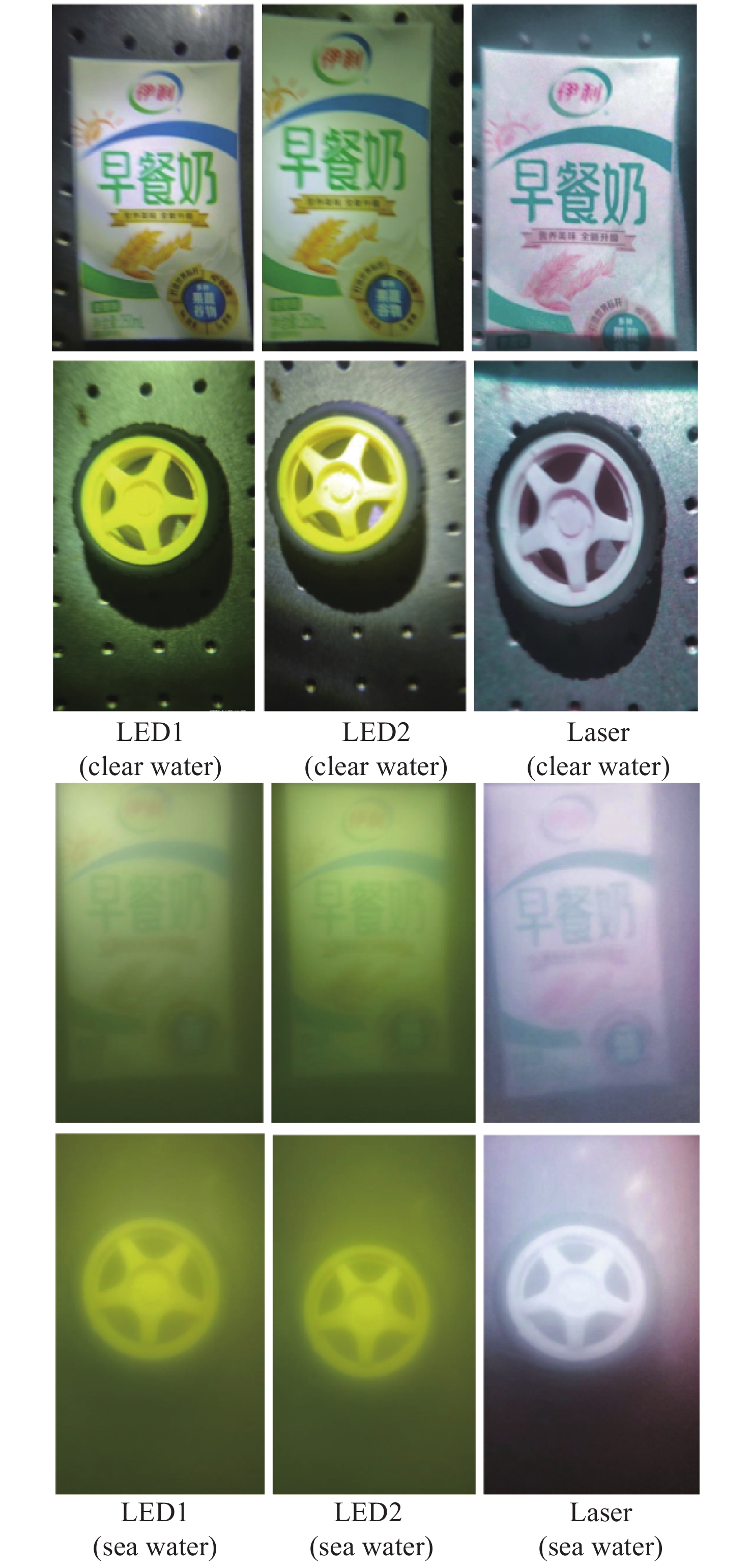
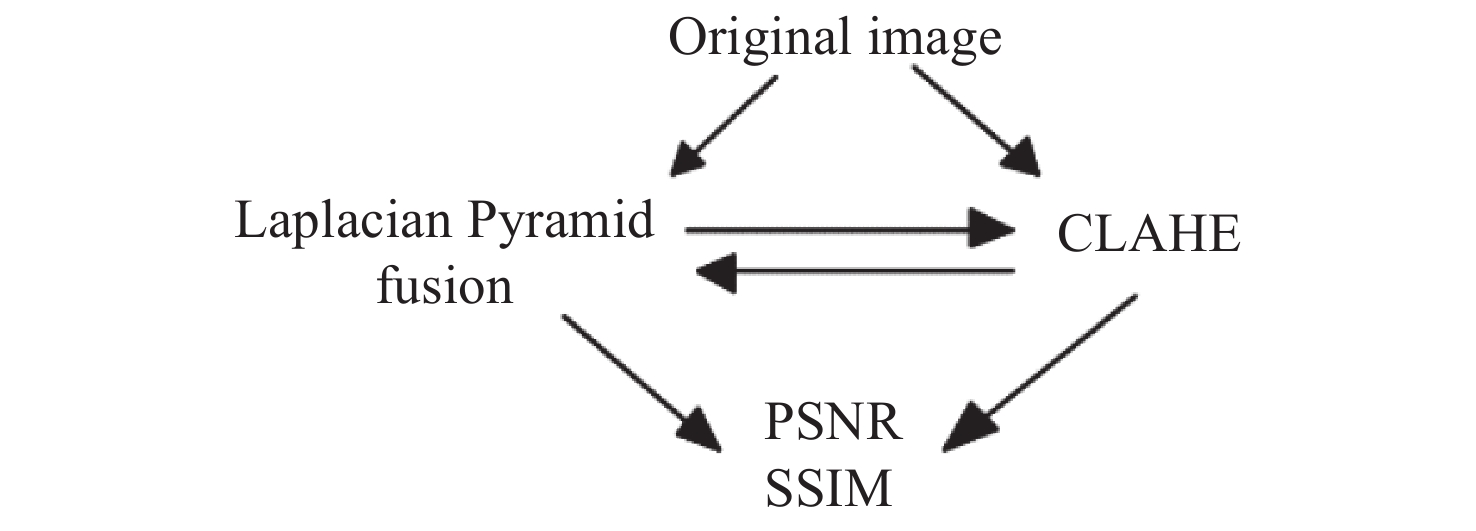
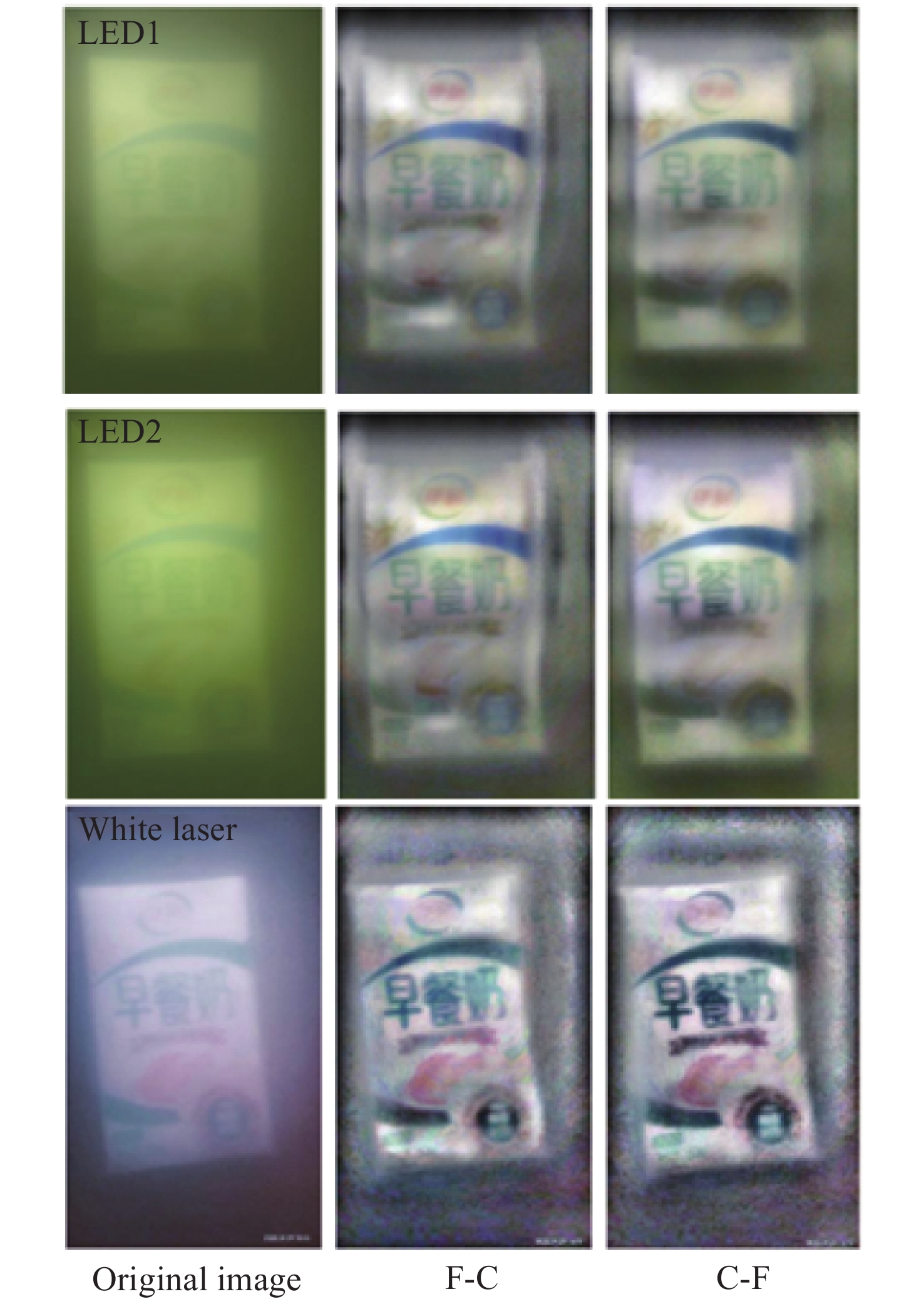
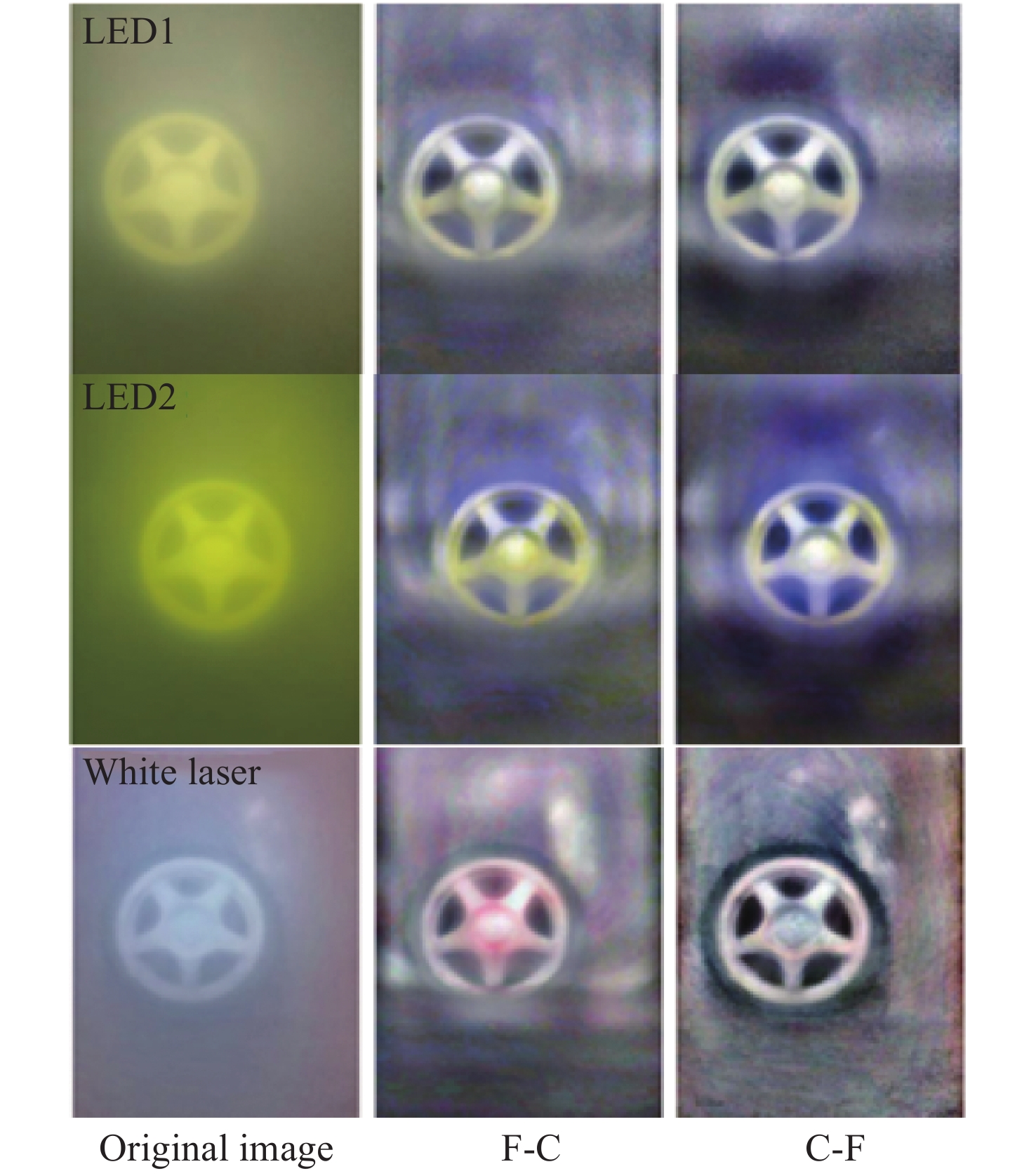
为了解决现阶段开展水下探测工作时存在的照明距离短、光谱范围窄等问题,建立了水下半导体白激光成像系统,并对该系统在不同光源及不同条件下采集图像的质量进行分析。将基于红绿蓝(RGB)三基色半导体激光器合成的功率为220 mW、色温为6469 K的白激光作为水下照明光源,分别与红、绿、蓝三种单色激光及LED白光光源在不同条件下的水下成像效果进行对比。对于不同水下光源采集的图像,使用不同算法对其进行处理、分析及质量评价。实验结果表明:半导体白激光作为水下光源,采集的图像不仅在细节信息及结构完整性上优于LED白光光源,同时在目标物色彩还原度以及边缘特征信息完整度方面也优于单色激光。半导体白激光具有能量集中、显色性强、光照度高的优势,其光源性能可满足水下低照度的成像要求,在相同的成像系统及成像距离下可获得真实性更强、质感更好、目标物特征信息更多的图像。