


Detecting of photoelectric peeping devices based on active laser detection
-
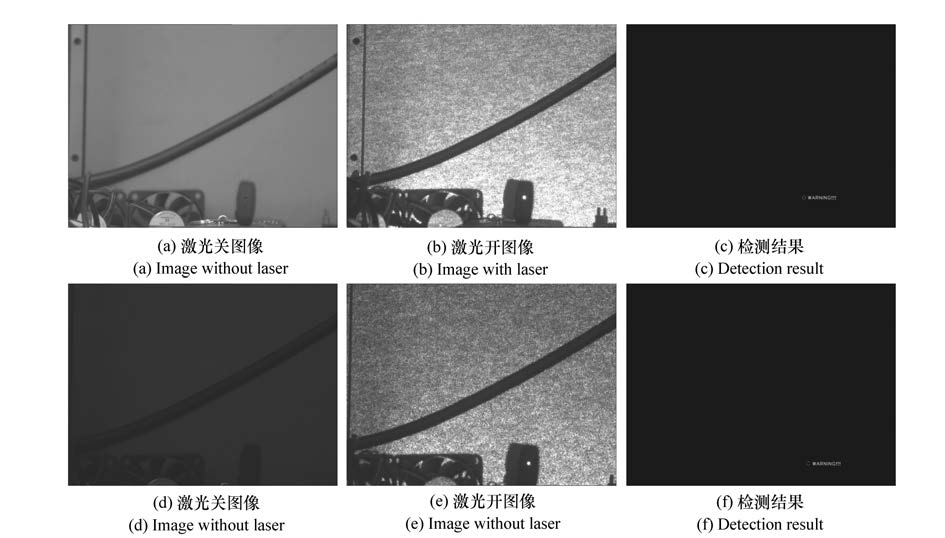
摘要: 针对激光主动探测时光电设备表现出的猫眼效应,搭建了基于CCD的激光主动探测系统,提出了一套有效的光电窥视设备检测算法。该算法在激光脉冲的间隔,同时采集激光主被动图像,根据窥视目标与普通漫反射物体的回波强度差异,利用背景差法检测窥视目标。实验结果表明,在半径为5 m的作用范围内,该激光主动探测系统可有效、快速地将光电窥视目标从背景中检测出来,并且不受场景和光照的限制。通过对光学口径为2 mm的光电窥视设备在20个不同场景环境下进行实验,正确检测率达到95%,且每帧的检测时间在0.015~0.021 s内,满足了实时性需求,验证了本文系统搭建方案的正确性与软件处理算法的有效性。Abstract: Based on the cat-eye effect of photoelectric devices, this paper establishes a system of active laser detection with CCD, and puts forward an effective algorithm for detecting peeping devices. The proposed algorithm acquires one image when the laser power is on, and the other image when the laser power is off in the laser pulse interval. According to the echo intensity difference on the peeping devices and usual objects, the target is detected by using the background difference method. The experimental results show that, within a radius of 5 m, the system can effectively and quickly detect peeping devices from background, and is not influenced by the scene and light. Through the experiments on 20 different scenes, the correct detection rate is 95%, and the detection time of each frame is in the range of 0.015-0.021 s, meeting the demand of real-time detection, which validate the correctness and effectiveness of this system.
-
Key words:
- laser active detection /
- cat-eye effect /
- background difference method
-

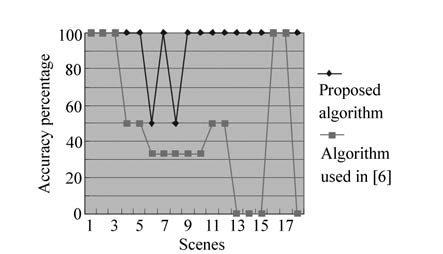
图 7 本文方法与文献[6]方法的正确率比较
Figure 7. Comparison of accuracy between proposed algorithm and the algorithm used in Ref.[6]
表 1 圆形特征参数比较
Table 1. Comparison of circle feature parameters
Expression Description Similarity  下载: 导出CSV
下载: 导出CSV
-
[1] [1] 朱海军,董小刚,李兰秀,等.纳秒激光主动成像侦察系统研究[J].激光与红外,2009,39(12):1301-1304. ZHU H J,DONH X G, LI L X,et al.. Research on the system of active reconnaissance with nanosecond laser[J]. Laser & Infrared,2009,39(12):1301-1304.(in Chinese) [2] [2] 赵勋杰,高稚允,张英远,等.基于"猫眼"效应的激光侦查技术及其在军事上的应用[J].光电技术,2003,29(4):415-417. ZHAO X J,GAO ZH Y,ZHANG Y Y,et al.. Technique of active laser reconnaissance based on the cat-eye effect and the applications in the military[J]. Optical Technique,2003,29(4):415-417.(in Chinese) [3] [3] LECOCQ C,DESHORS G,LADO-BORDOWSKY O,et al.. Sight laser detection modeling[J]. SPIE,2003,5086:280-286. [4] [4] TRUONG K N,PATEL S N,SUMMET J W,et al.. Preventing camera recording by designing a capture-resistant environment[J]. Lecture Notes in Computer Science,2005,3660:903-916. [5] [5] 周斌,刘秉契,张瑜,等.利用CCD实现"猫眼"目标探测的实验研究[J].光电工程,2011,38(11):35-39. ZHOU B,LIU B Q,ZHANG Y,et al.. Research of target detection based on the cat-eye effect with CCD[J]. Infrared Opto-Electronic Engineering,2011,38(11):35-39.(in Chinese) [6] [6] 同兰娟,蒋晓谕,宋小衫,等.基于"猫眼效应"的激光成像的目标探测[J].激光与红外,2009,39(9):982-985. TONG L J,JIANG X Y,SONG X SH,et al.. Target detection based on laser imaging with cat-eye effect[J]. Laser & Infrared,2009,39(9):982-985.(in Chinese) [7] [7] REN X M,LI L. Recognizing cat-eye targets with dual criterions of shape and modulation frequency[J]. Chinese Optical Letters,2011,9:1-5. [8] [8] 张博,牛燕熊,张雏,等."猫眼"目标回波功率的影响因素分析[J].红外与激光工程,2009,38(3):420-423. ZHANG B,NIU Y X,ZHANG CH,et al.. Analysis of influence factors for reflected wave power of "Cat-eye" target[J]. Infrared and Laser Engineering,2009,38(3):420-423.(in Chinese) [9] [9] 和婷,牛燕熊,张鹏,等.光电系统离焦量对其猫眼效应回波功率的影响规律及原因分析[J].红外与激光工程,2012,41(11):2956-2960. HE T,NIU Y X,ZHANG P,et al.. Original analysis and influence of the focal shift on the retro-reflected power of cat-eye effect[J]. Infrared and Laser Engineering,2012,41(11):2956-2960.(in Chinese) [10] [10] 秦楷,韩绍坤,曾春辉."猫眼"目标的激光主动探测距离分析[J].光学技术,2009,35(4):486-488. QIN K,HAN SH K,ZENG CH H. Analysis of active laser detection distance for cat-eye target[J]. Optical Technique,2009,35(4):486-488.(in Chinese) [11] [11] 闵永智,党建武,张振海.图像式无砟轨道表面沉降在线监测系统[J].光学精密工程,2013,6(21):1621-1627. MIN Y ZH,DANG J W,ZHANG ZH H. Online surface settlement monitoring system of image-based ballastless track[J]. Opt. Precision Eng.,2013,6(21):1621-1627(in Chinese). [12] [12] 黄继鹏,王延杰,孙宏海.激光光斑位置精确测量系统[J].光学精密工程,2013,4(21):841-848. HUANG J P,WANG Y J,SUN H H. Precise position measuring system for laser spots[J]. Opt. Precision Eng.,2013,4(21):841-848.(in Chinese) [13] [13] 郝明明,秦莉,朱洪波.基于半导体激光短阵列的976 nm高功率光纤耦合模块[J].光学精密工程,2013,4(21):895-903. HAO M M,QIN L,ZHU H B. High power 976 nm fiber coupled module based on diode laser short bars[J]. Opt. Precision Eng.,2013,4(21):895-903.(in Chinese) [14] [14] 张震,周孟莲,张检民.CCD中的激光光斑阴影现象及机理[J].光学精密工程,2013,5(21):1365-1371. ZHANG ZH,ZHOU M L,ZHANG J M. Shadows of laser spots in CCD and their mechanism[J]. Opt. Precision Eng.,2013,5(21):1365-1371.(in Chinese) [15] [15] 王灿进,孙涛,石宁宁.基于双隐含层BP算法的激光主动成像识别系统[J].光学精密工程,2014,6(22):1639-1647. WANG CH J,SUN T,SHI N N. Laser active imaging and recognition system based on double hidden layer BP algorithm[J]. Opt. Precision Eng.,2014,6(22):1639-1647.(in Chinese) -

 下载:
下载:






图(7) / 表(1)
计量
- 文章访问数: 2611
- HTML全文浏览量: 1027
- PDF下载量: 666
- 被引次数: 0
