


Active and passive optical image fusion technology
-
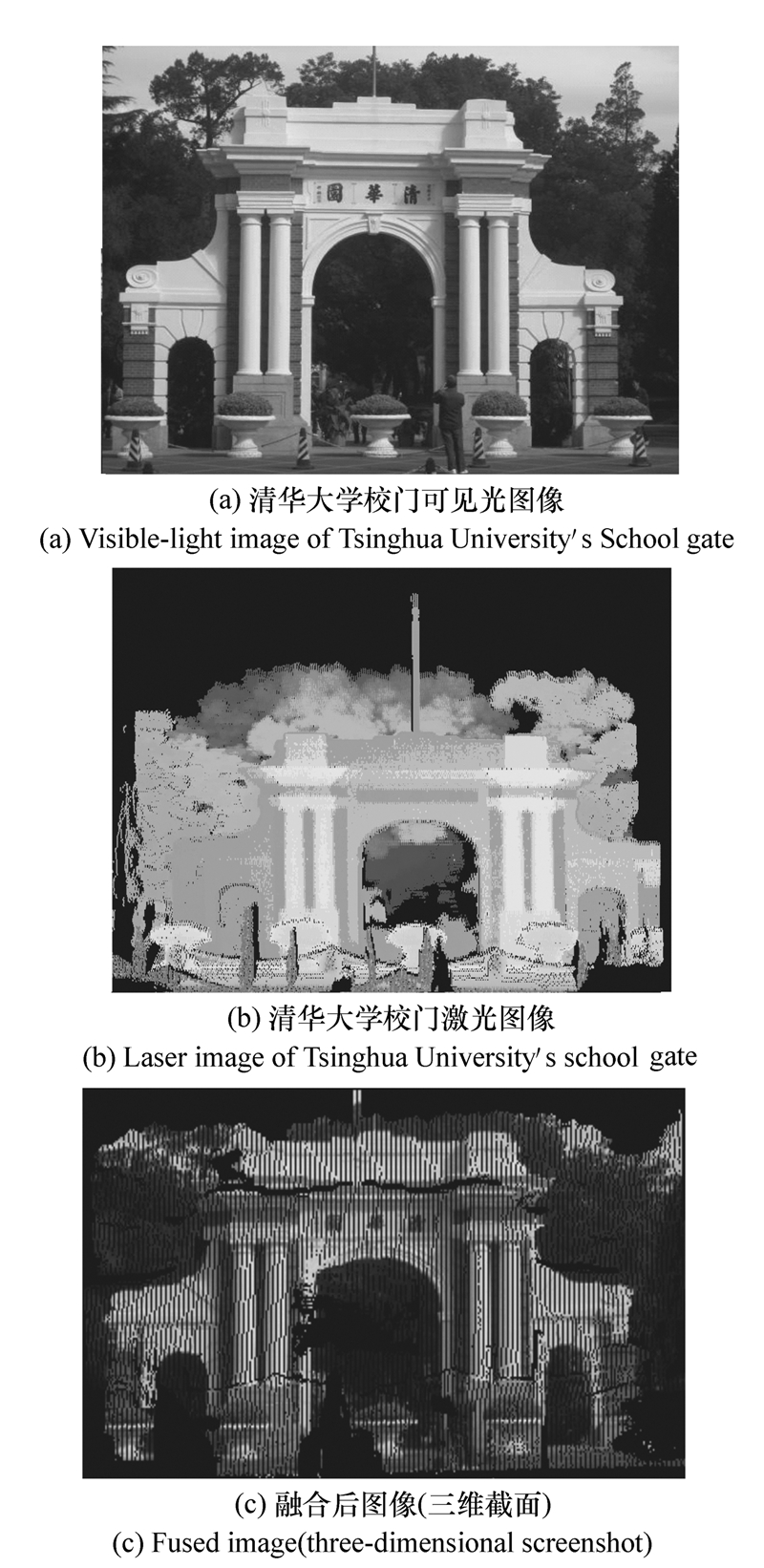
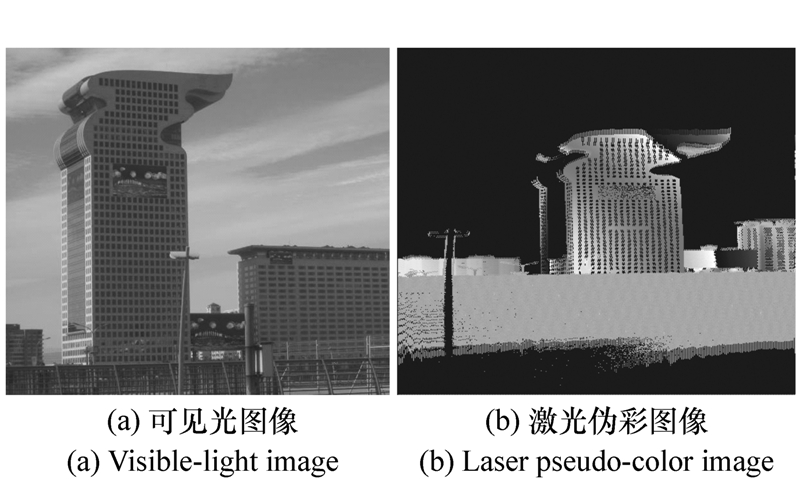
摘要: 本文应用扫描式激光成像雷达获取试验数据并实现对激光数据的三维成像处理,给出了基于目标特征的激光雷达图像与被动光学图像的数据融合方法,实现了激光图像和光学图像间的三维融合。试验结果表明,本文所提出的基于目标特征的两种不同质图像间的融合方法是可行的,融合后的图像具有丰富的光谱信息和三维立体信息。Abstract: In this paper, we use scanning laser imaging radar to acquire test data and achieve three-dimensional imaging process to laser data, giving data fusion method based on target features between laser radar image and passive optical image, and realizing three-dimensional fusion between laser image and optical image. The test results show that the fusion method of different image qualities based on target features proposed in this paper is feasible. The fused image has both rich spectral and three-dimensional informations.
-
Key words:
- laser imaging radar /
- image registration /
- data fusion /
- stereo mapping
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] -

 下载:
下载:



图(4)
计量
- 文章访问数: 1981
- HTML全文浏览量: 724
- PDF下载量: 849
- 被引次数: 0
