2015年 8卷 第3期

2015, 8(3): 313-328.
doi: 10.3788/CO.20150803.0313
 摘要
摘要 HTML全文
HTML全文 PDF 1134KB
PDF 1134KB
摘要:
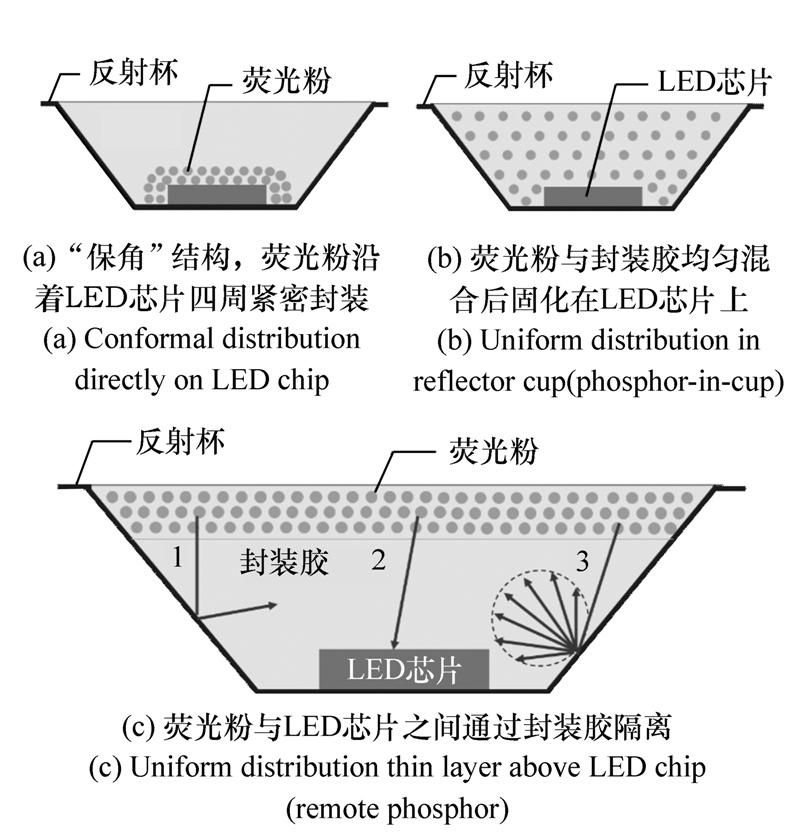
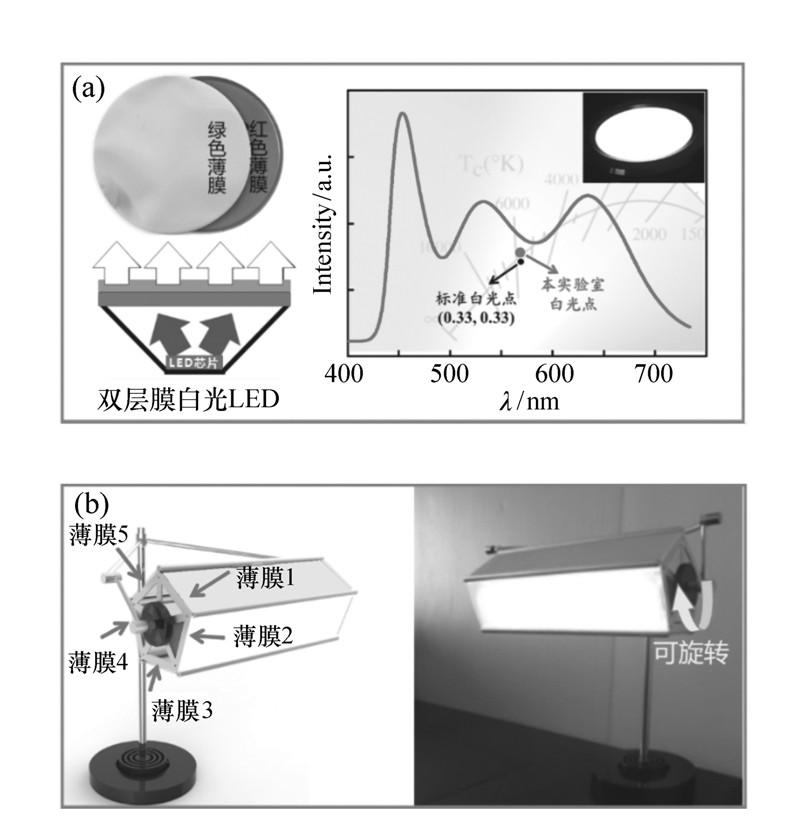
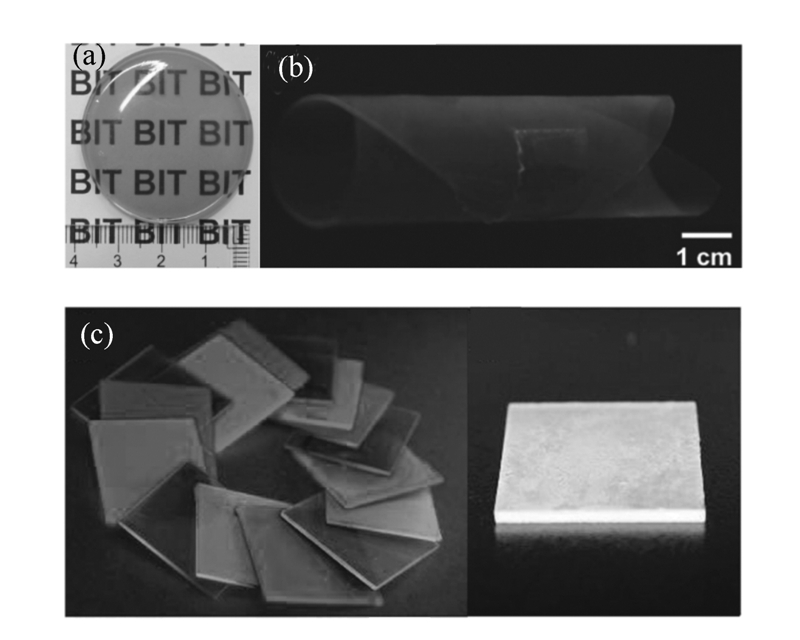
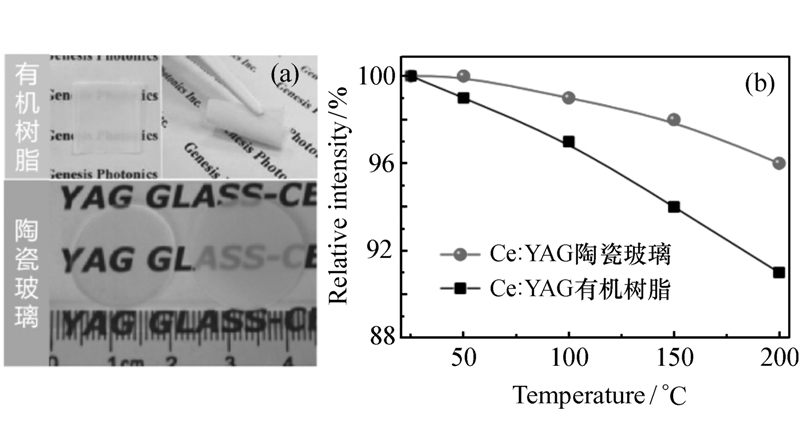
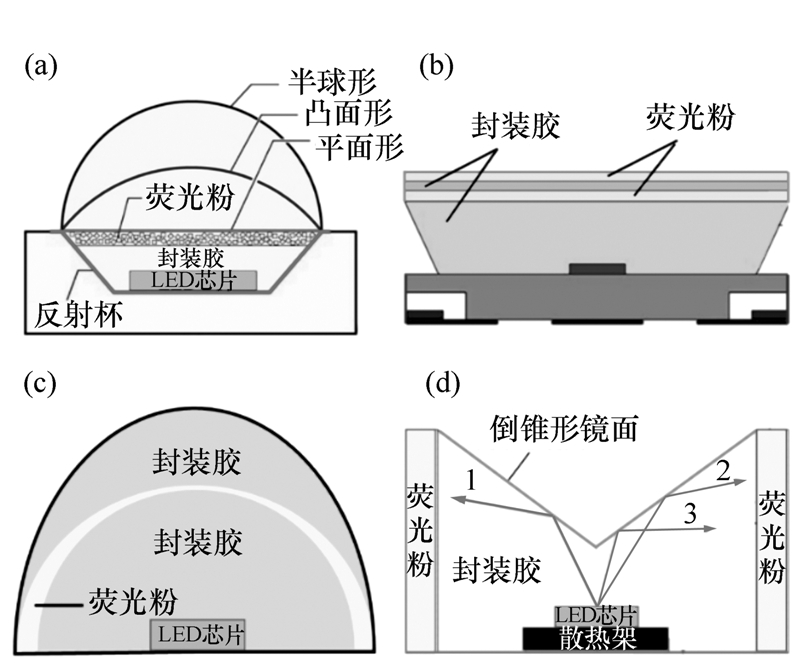
远程荧光粉技术通过将荧光粉与芯片分离,降低了荧光粉的工作环境温度,提升了荧光粉的稳定性,改善了白光LED的照明品质和光效,同时有望降低LED眩晕度,提供大面积平板光源,在未来照明与显示应用中具有重要意义。远程荧光粉技术的白光LED将向多功能化、高性能化和智能化方向发展。本文将综述白光LED远程荧光粉技术的研究进展,主要介绍其封装工艺的优化、评价参数的构建和分析,以及相关荧光材料的发展现状。
远程荧光粉技术通过将荧光粉与芯片分离,降低了荧光粉的工作环境温度,提升了荧光粉的稳定性,改善了白光LED的照明品质和光效,同时有望降低LED眩晕度,提供大面积平板光源,在未来照明与显示应用中具有重要意义。远程荧光粉技术的白光LED将向多功能化、高性能化和智能化方向发展。本文将综述白光LED远程荧光粉技术的研究进展,主要介绍其封装工艺的优化、评价参数的构建和分析,以及相关荧光材料的发展现状。

2015, 8(3): 329-339.
doi: 10.3788/CO.20150803.0329
摘要:
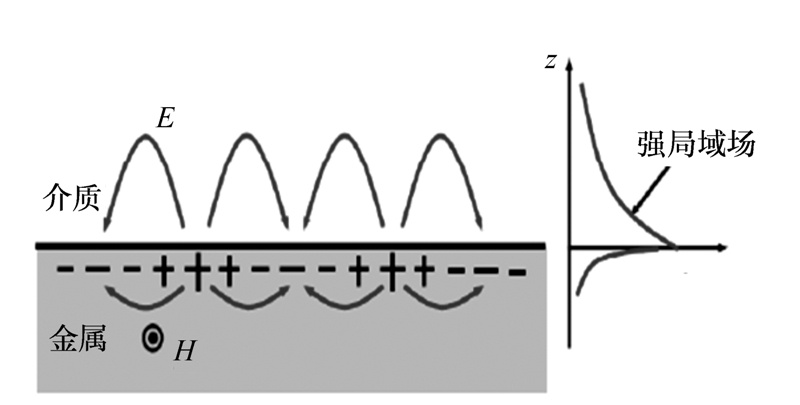
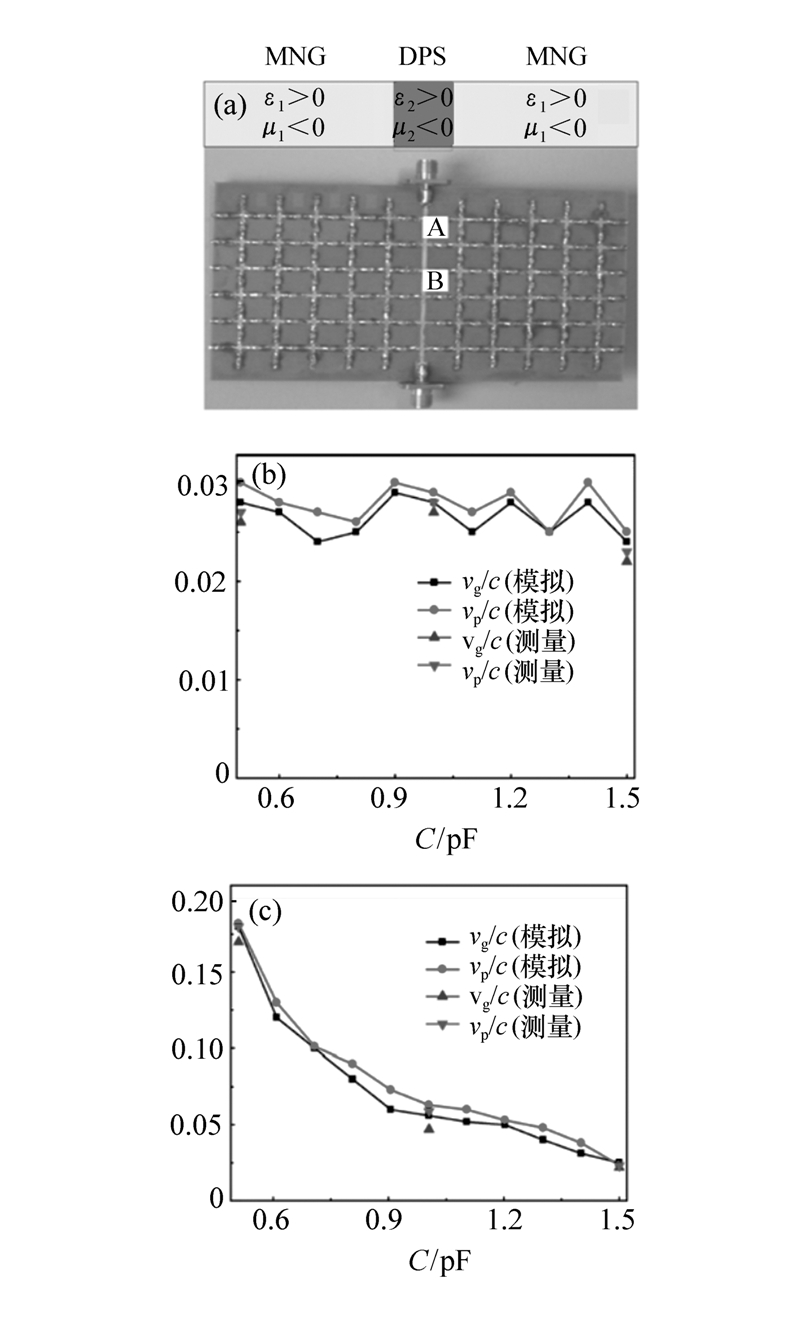
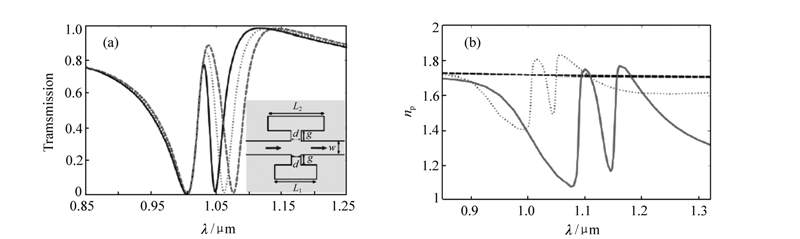
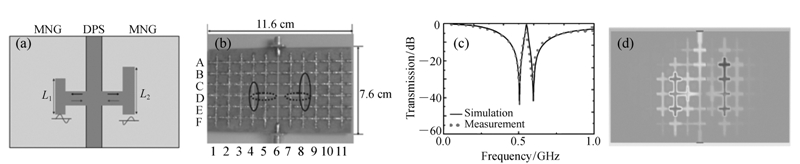
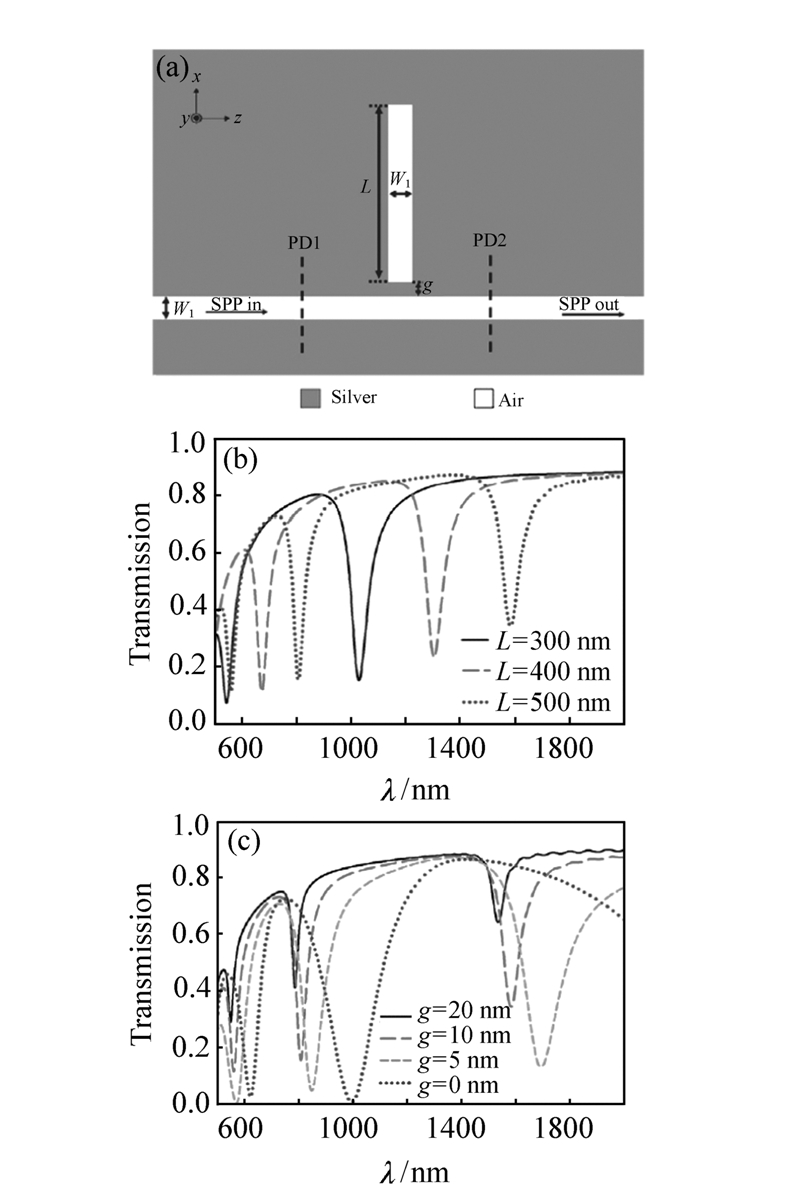
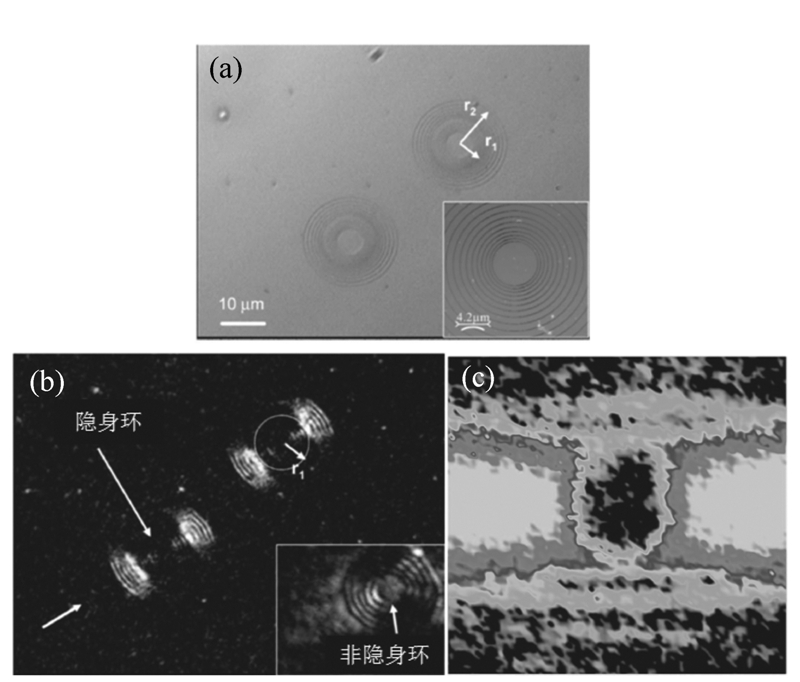
本文在介绍表面等离子波导基本理论的基础上,主要对表面等离子波导的若干应用进行综述, 包括基于表面等离子波导实现的光学和微波频段的慢波效应、类电磁感应透明现象、可调滤波器,以及通过对电磁波绕射而实现的隐身效应等。最后指出该领域存在的问题与挑战, 并对今后的发展趋势进行了展望。分析认为,通过引入增益介质、采用超导材料等方法降低表面等离子波导材料的损耗、减少工艺制作的难度是今后亟待解决的问题。
本文在介绍表面等离子波导基本理论的基础上,主要对表面等离子波导的若干应用进行综述, 包括基于表面等离子波导实现的光学和微波频段的慢波效应、类电磁感应透明现象、可调滤波器,以及通过对电磁波绕射而实现的隐身效应等。最后指出该领域存在的问题与挑战, 并对今后的发展趋势进行了展望。分析认为,通过引入增益介质、采用超导材料等方法降低表面等离子波导材料的损耗、减少工艺制作的难度是今后亟待解决的问题。


2015, 8(3): 340-349.
doi: 10.3788/CO.20150803.0340
摘要:
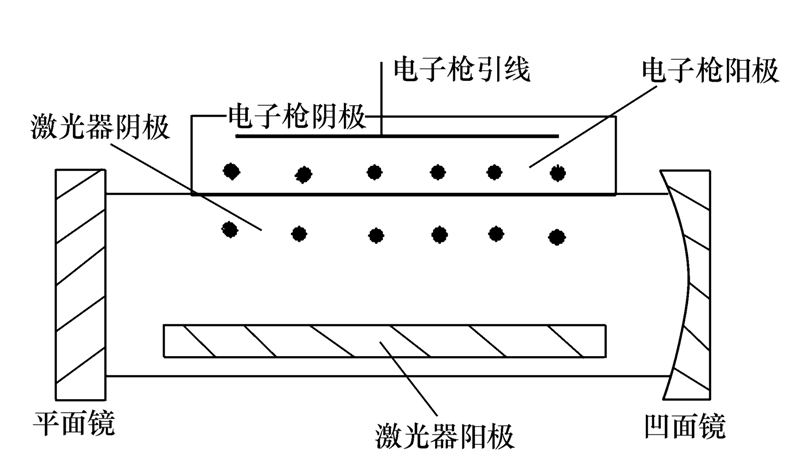
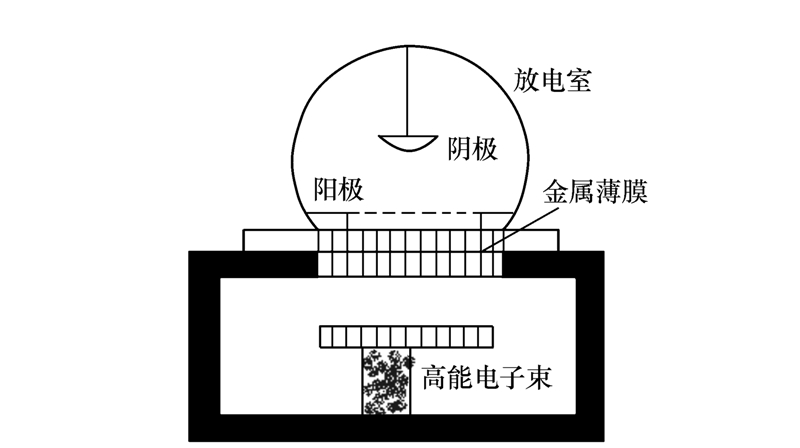
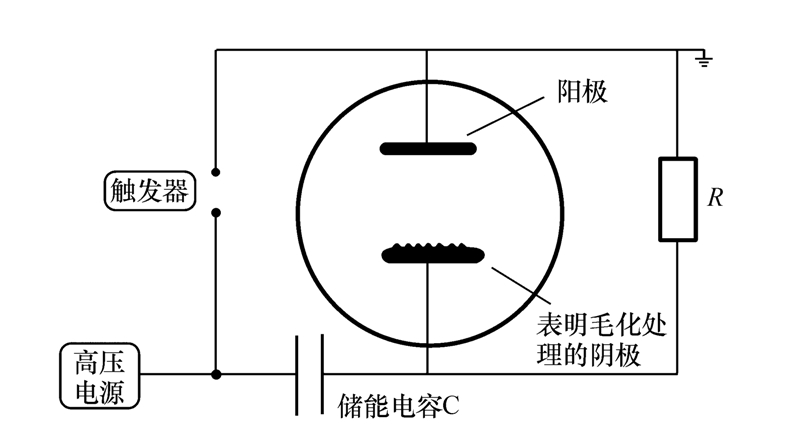
HF/DF激光器是中红外波段能提供最高能量输出的激光光源,也是中红外波段应用非常广泛的相干光源。本文介绍了近几年国内外关于非链式HF/DF激光器的研究进展及其成果应用,分析了非链式HF/DF激光器在应用方面的优缺点,总结了实现非链式HF/DF激光输出的关键技术和存在的问题,指出了该技术的未来发展方向。
HF/DF激光器是中红外波段能提供最高能量输出的激光光源,也是中红外波段应用非常广泛的相干光源。本文介绍了近几年国内外关于非链式HF/DF激光器的研究进展及其成果应用,分析了非链式HF/DF激光器在应用方面的优缺点,总结了实现非链式HF/DF激光输出的关键技术和存在的问题,指出了该技术的未来发展方向。


2015, 8(3): 350-359.
doi: 10.3788/CO.20150803.0350
摘要:
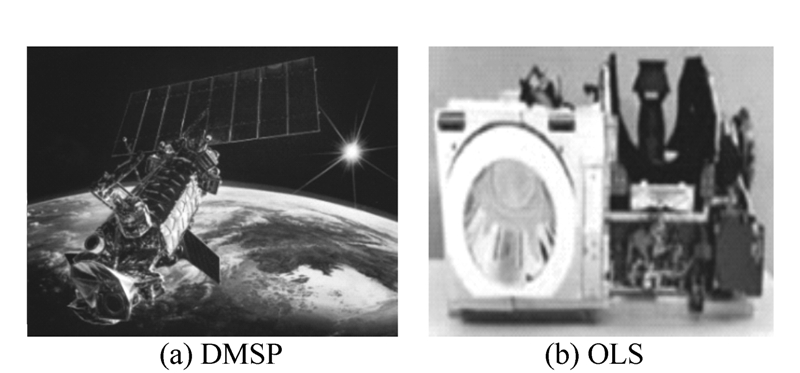
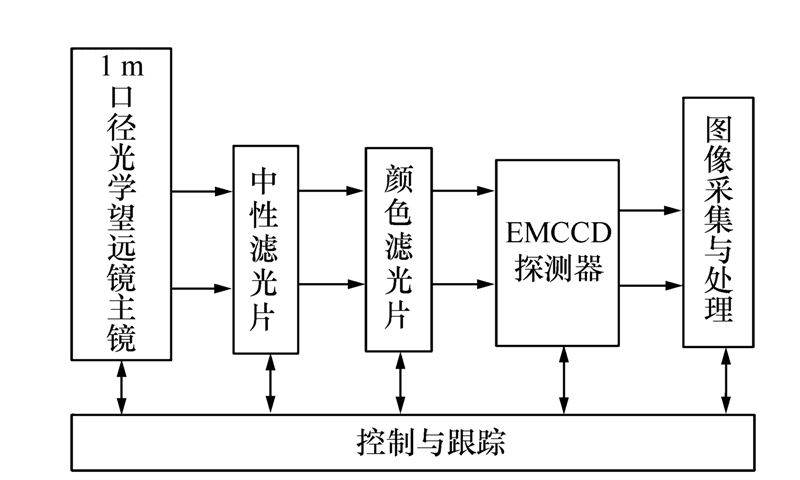
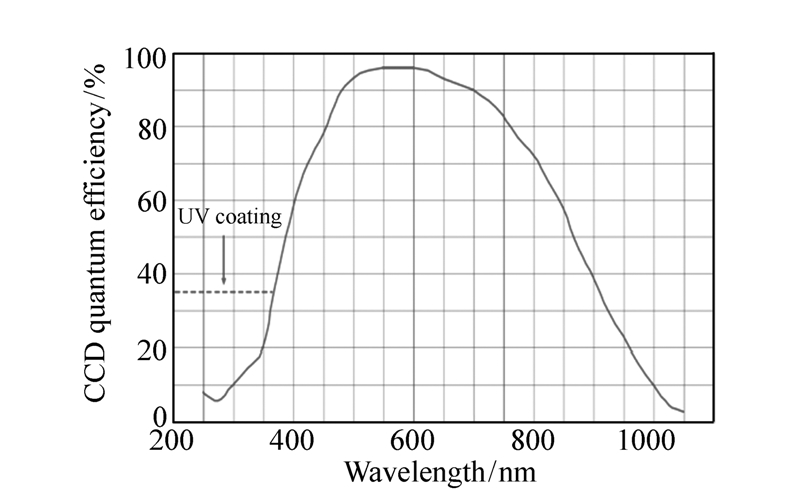
星载微光探测仪器可以在低照度条件下获取可见光至近红外谱段的云图及地面特征资料,是监测夜间和晨昏时段低云大雾的最有效手段。本文介绍了星载微光探测原理;综述了国内外星载微光探测仪器的发展历程,对其卫星系统、仪器技术指标、成像关键技术、数据特点等做了详细论述;最后总结了星载微光探测技术在低云大雾监测、城市灯光和火情监测、烟雾和尘埃监测等方面的应用,它可为我国气象卫星发展相近载荷起到借鉴作用,并完善和丰富我国现有的气象业务观测体系。
星载微光探测仪器可以在低照度条件下获取可见光至近红外谱段的云图及地面特征资料,是监测夜间和晨昏时段低云大雾的最有效手段。本文介绍了星载微光探测原理;综述了国内外星载微光探测仪器的发展历程,对其卫星系统、仪器技术指标、成像关键技术、数据特点等做了详细论述;最后总结了星载微光探测技术在低云大雾监测、城市灯光和火情监测、烟雾和尘埃监测等方面的应用,它可为我国气象卫星发展相近载荷起到借鉴作用,并完善和丰富我国现有的气象业务观测体系。



2015, 8(3): 360-367.
doi: 10.3788/CO.20150803.0360
摘要:
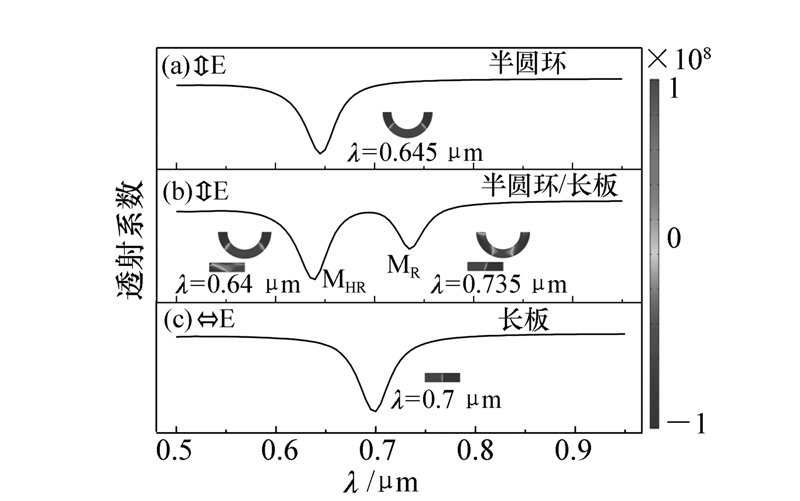
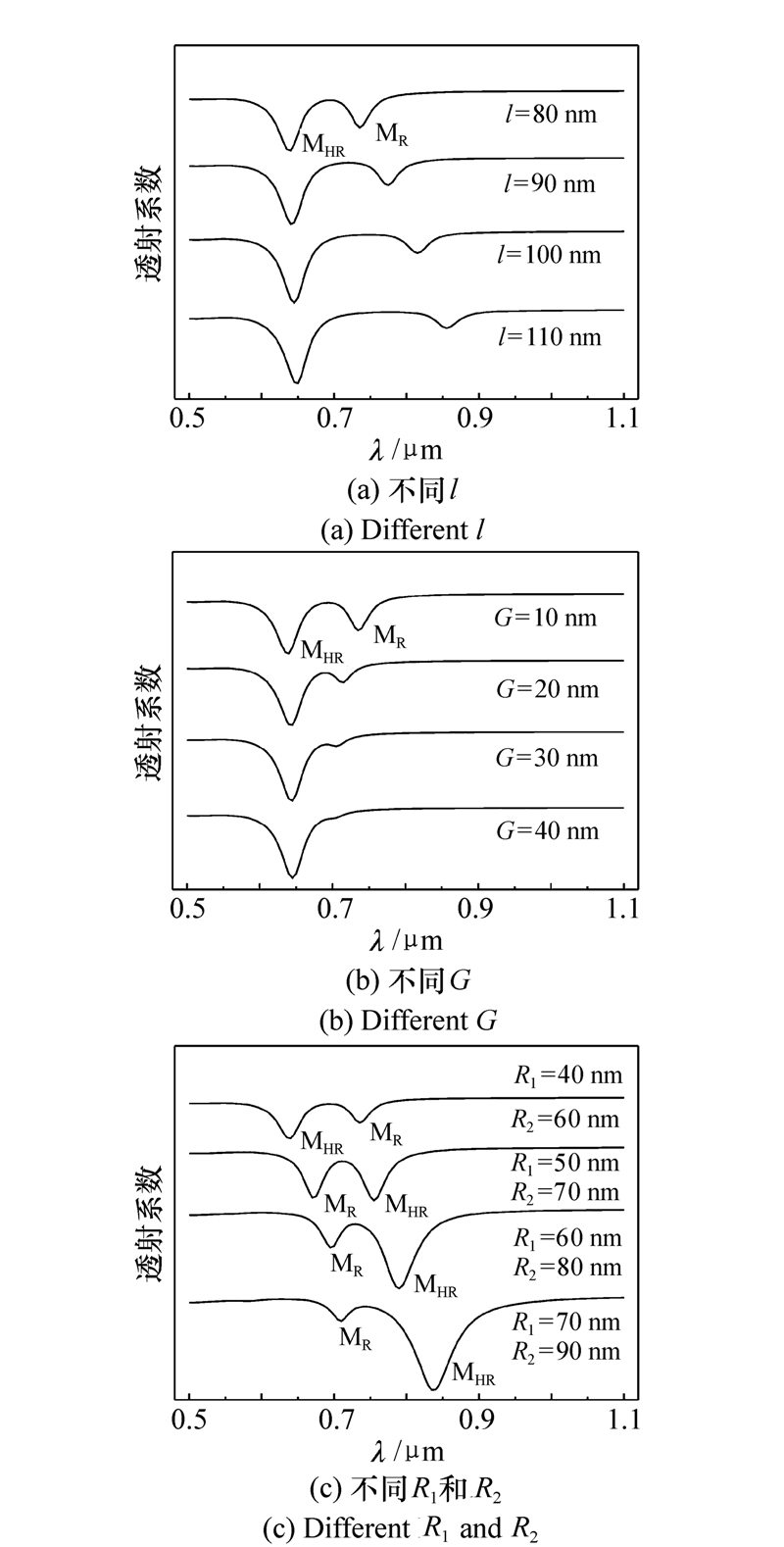
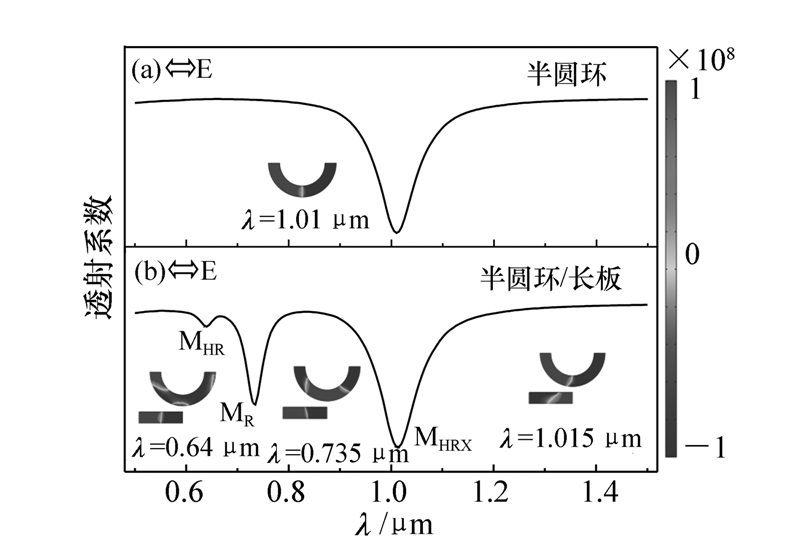
本文设计了金属半圆环/长板阵列,并应用有限元方法研究了该阵列的透射特性。研究表明:由于半圆环与长板之间的电场耦合,在该阵列中产生了法诺共振现象。法诺共振峰强烈地依赖于半圆环/长板的结构参数和相对位置,并且法诺共振峰对周围介质折射率有着较高的灵敏度,最高可以达到862.5 nm/RIU。这些结果有助于设计基于法诺共振的微纳光子学器件。
本文设计了金属半圆环/长板阵列,并应用有限元方法研究了该阵列的透射特性。研究表明:由于半圆环与长板之间的电场耦合,在该阵列中产生了法诺共振现象。法诺共振峰强烈地依赖于半圆环/长板的结构参数和相对位置,并且法诺共振峰对周围介质折射率有着较高的灵敏度,最高可以达到862.5 nm/RIU。这些结果有助于设计基于法诺共振的微纳光子学器件。






2015, 8(3): 368-377.
doi: 10.3788/CO.20150803.0368
摘要:
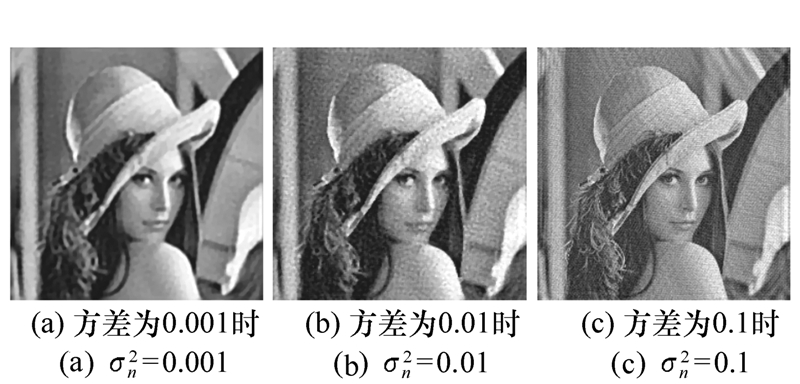
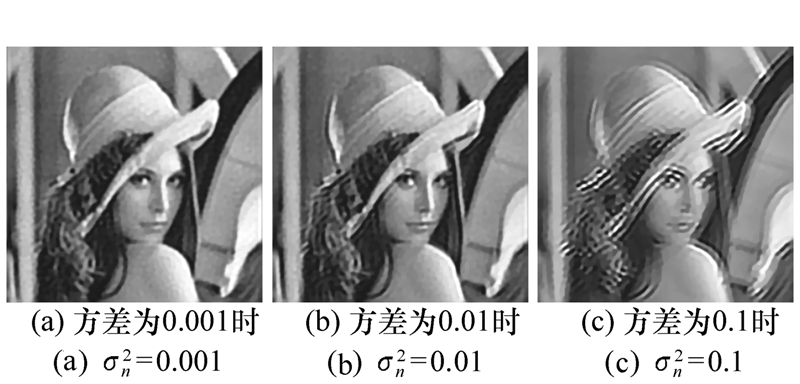
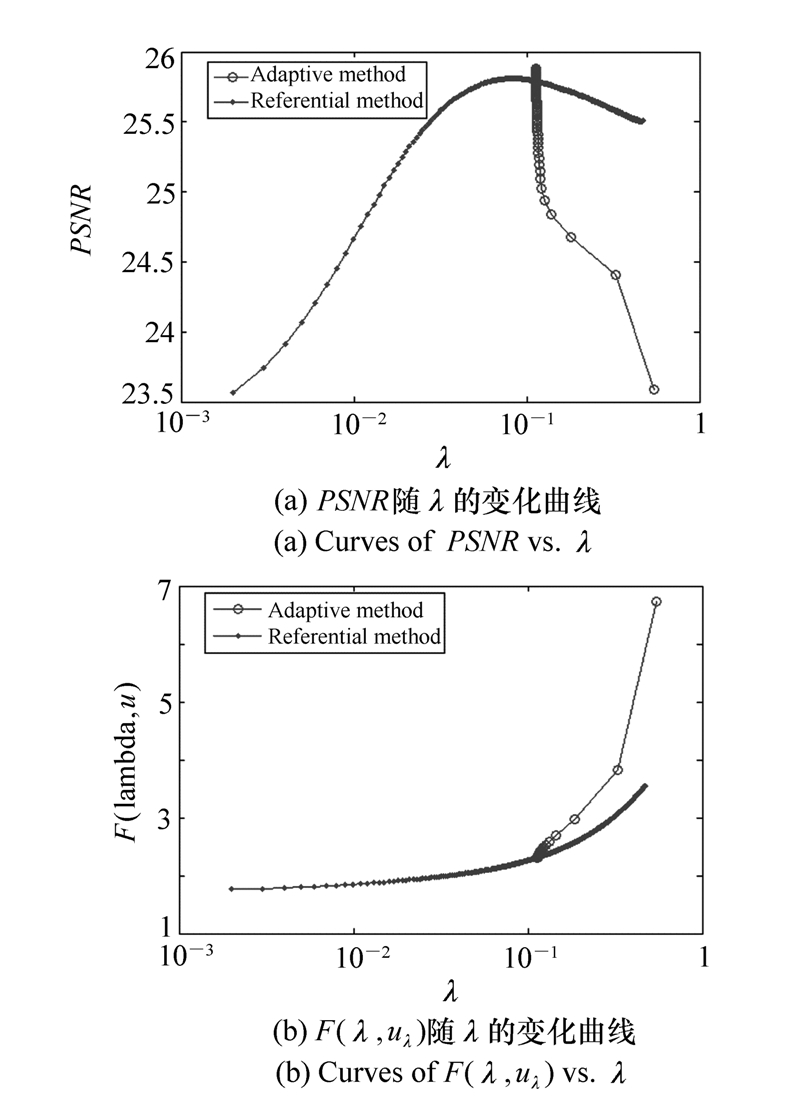
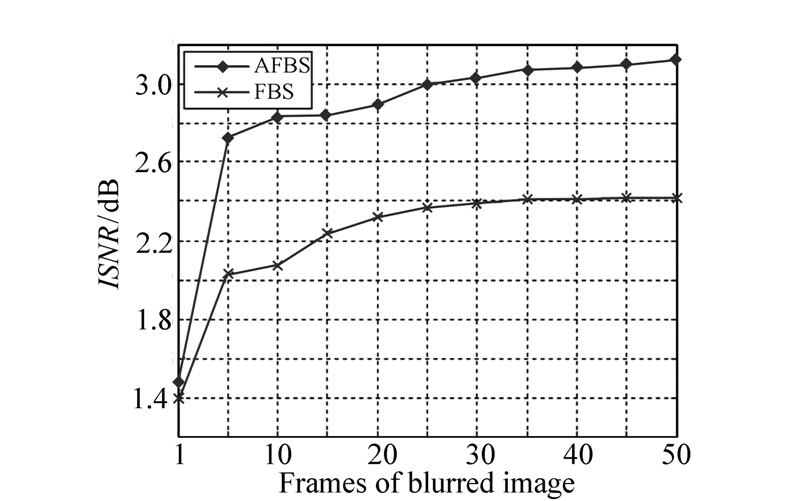
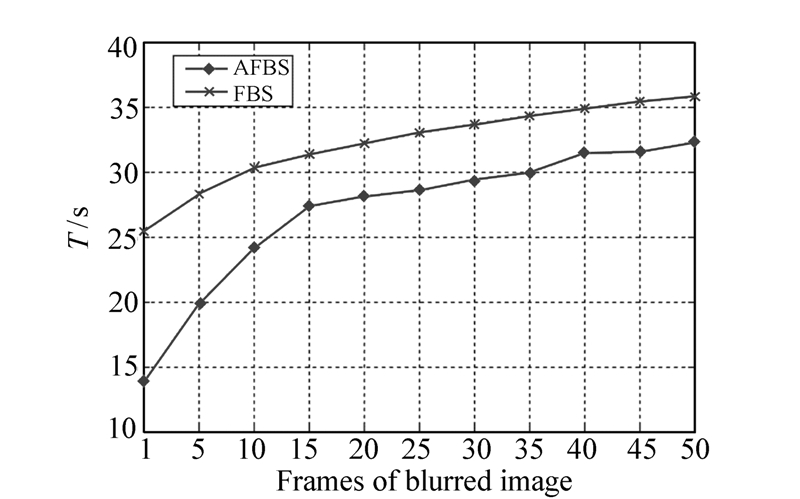
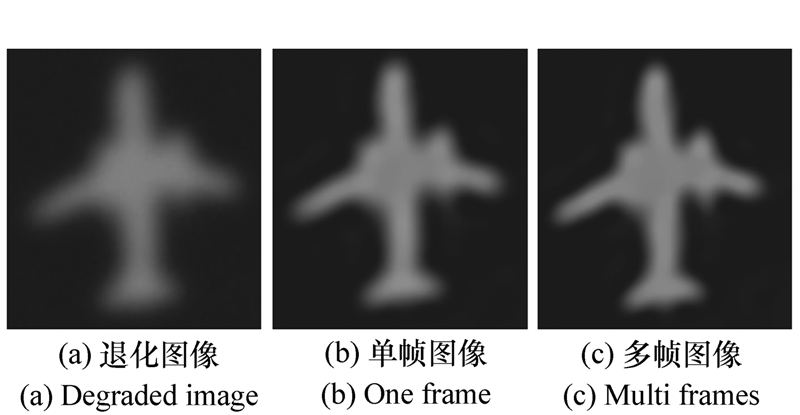
针对湍流退化图像随机性的问题,提出了一种基于随机点扩散函数的多帧湍流退化图像自适应复原方法。首先介绍了随机点扩散函数的图像退化模型,并分析了点扩散函数随机性对图像复原造成的影响,建立了基于随机点扩散函数的多帧图像退化模型。在此基础上,建立了基于多帧退化图像的全变分复原模型,利用前向后向算子分裂法对模型进行求解,提高了算法的运算效率。然后,提出了一种新的自适应正则化参数选取方法,该方法利用全变分复原模型的目标函数计算正则化参数,当正则化参数收敛时,复原图像的峰值信噪比达到最大值,因此利用目标函数的相对差值作为自适应算法迭代终止的条件,可以获得最佳复原效果。最后通过实验分析,算法中退化图像的帧数应不大于10帧。实验结果表明:当取10帧退化图像时,AFBS算法运算时间与单帧的FBS算法相当,信噪比增益为1.4 dB。本文算法对图像噪声有明显的抑制作用,对湍流退化图像可以获得较好的复原效果。
针对湍流退化图像随机性的问题,提出了一种基于随机点扩散函数的多帧湍流退化图像自适应复原方法。首先介绍了随机点扩散函数的图像退化模型,并分析了点扩散函数随机性对图像复原造成的影响,建立了基于随机点扩散函数的多帧图像退化模型。在此基础上,建立了基于多帧退化图像的全变分复原模型,利用前向后向算子分裂法对模型进行求解,提高了算法的运算效率。然后,提出了一种新的自适应正则化参数选取方法,该方法利用全变分复原模型的目标函数计算正则化参数,当正则化参数收敛时,复原图像的峰值信噪比达到最大值,因此利用目标函数的相对差值作为自适应算法迭代终止的条件,可以获得最佳复原效果。最后通过实验分析,算法中退化图像的帧数应不大于10帧。实验结果表明:当取10帧退化图像时,AFBS算法运算时间与单帧的FBS算法相当,信噪比增益为1.4 dB。本文算法对图像噪声有明显的抑制作用,对湍流退化图像可以获得较好的复原效果。




2015, 8(3): 378-385.
doi: 10.3788/CO.20150803.0378
摘要:
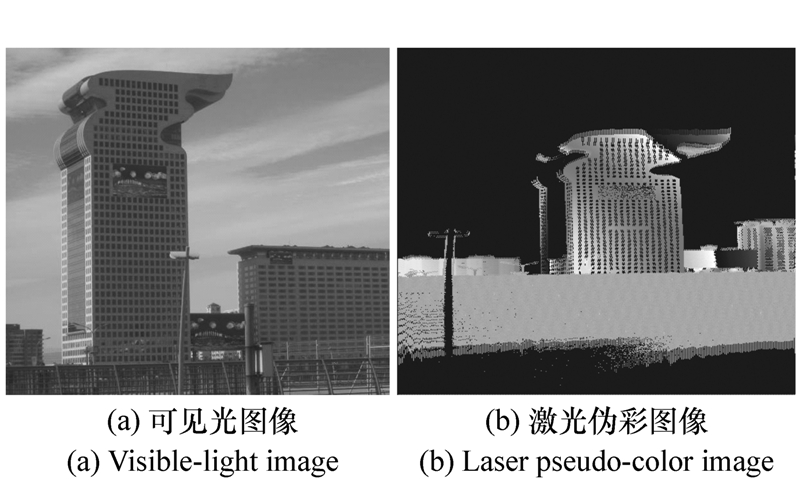
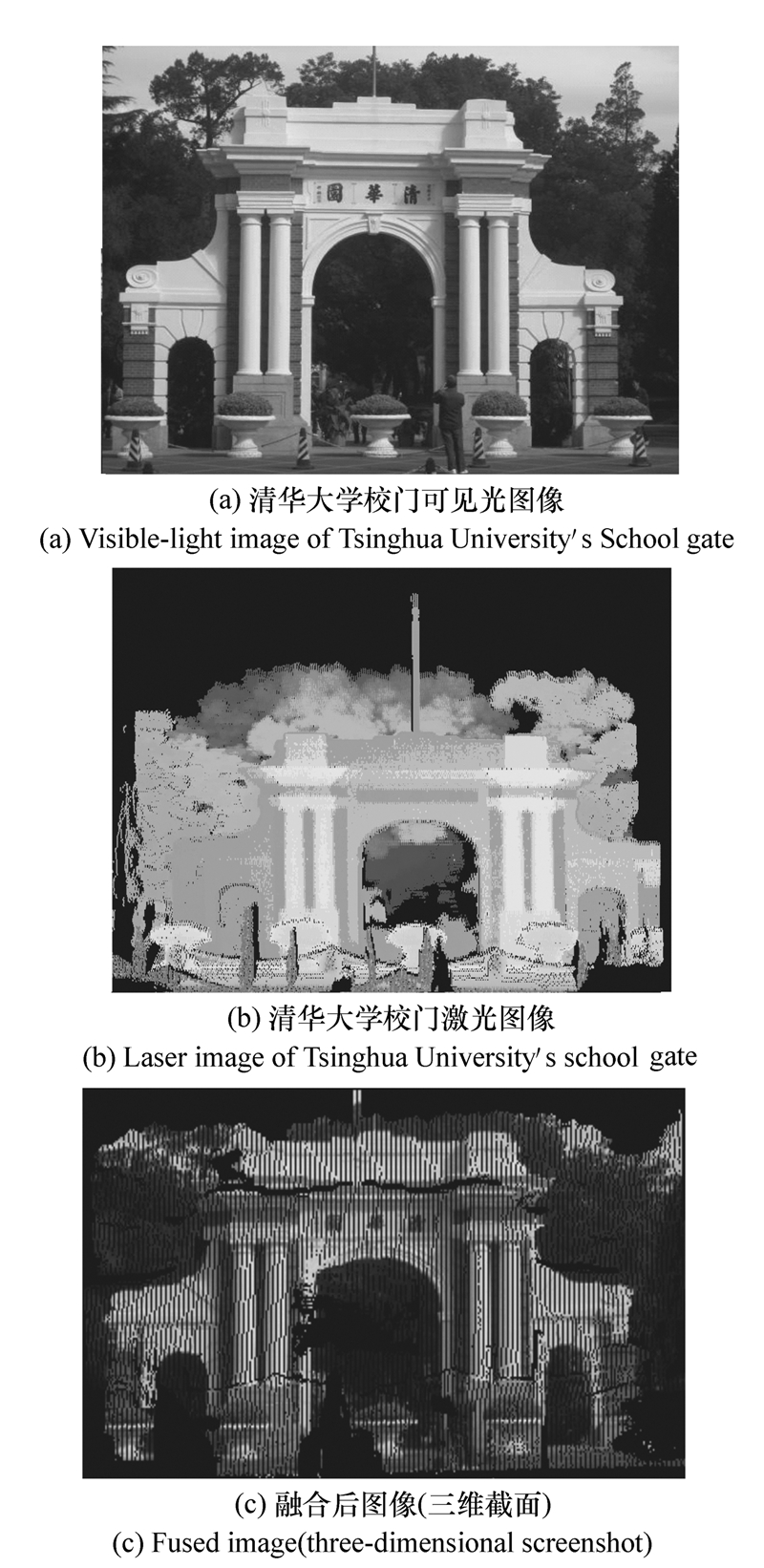
本文应用扫描式激光成像雷达获取试验数据并实现对激光数据的三维成像处理,给出了基于目标特征的激光雷达图像与被动光学图像的数据融合方法,实现了激光图像和光学图像间的三维融合。试验结果表明,本文所提出的基于目标特征的两种不同质图像间的融合方法是可行的,融合后的图像具有丰富的光谱信息和三维立体信息。
本文应用扫描式激光成像雷达获取试验数据并实现对激光数据的三维成像处理,给出了基于目标特征的激光雷达图像与被动光学图像的数据融合方法,实现了激光图像和光学图像间的三维融合。试验结果表明,本文所提出的基于目标特征的两种不同质图像间的融合方法是可行的,融合后的图像具有丰富的光谱信息和三维立体信息。



2015, 8(3): 386-393.
doi: 10.3788/CO.20150803.0386
摘要:
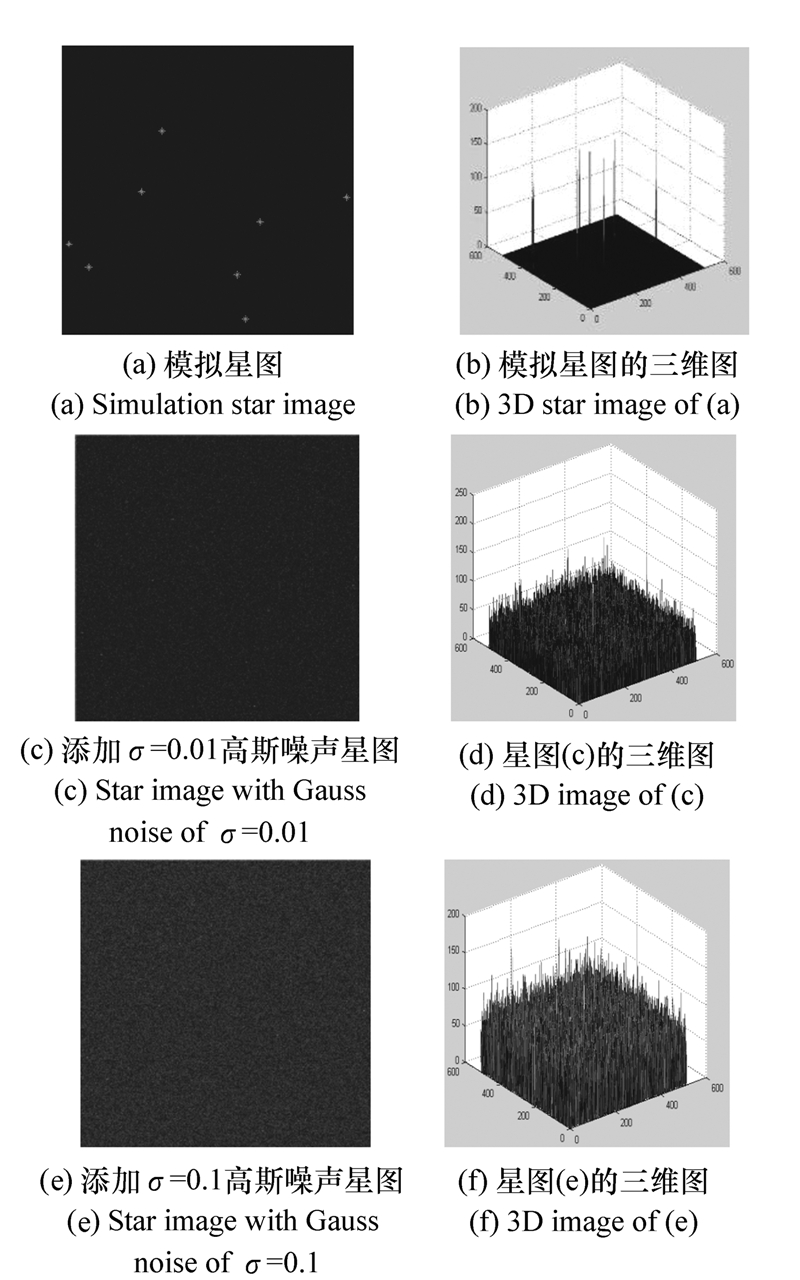
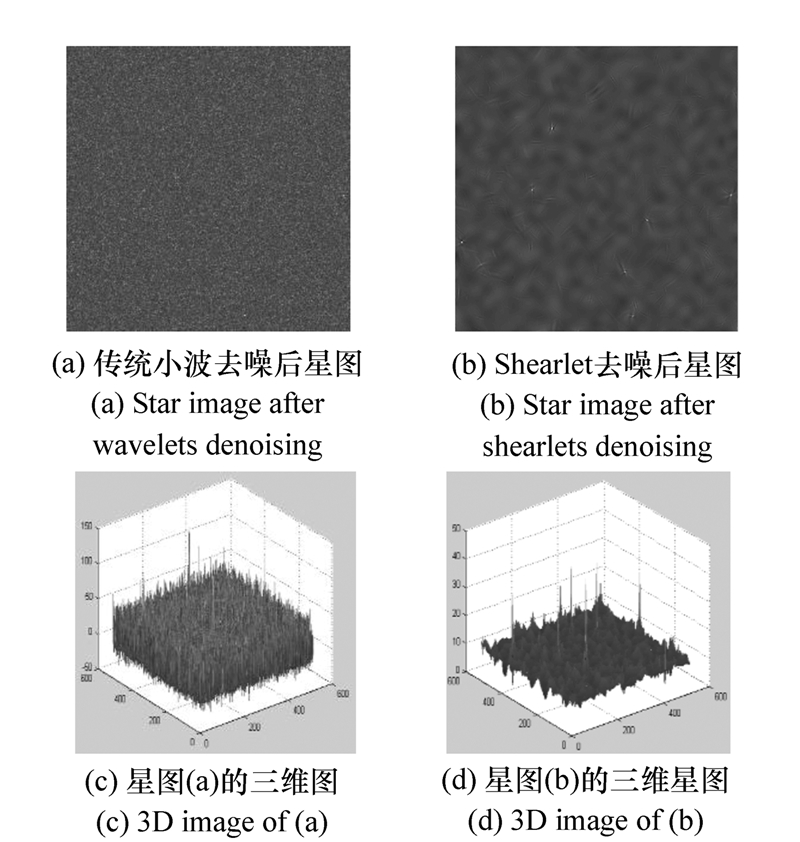
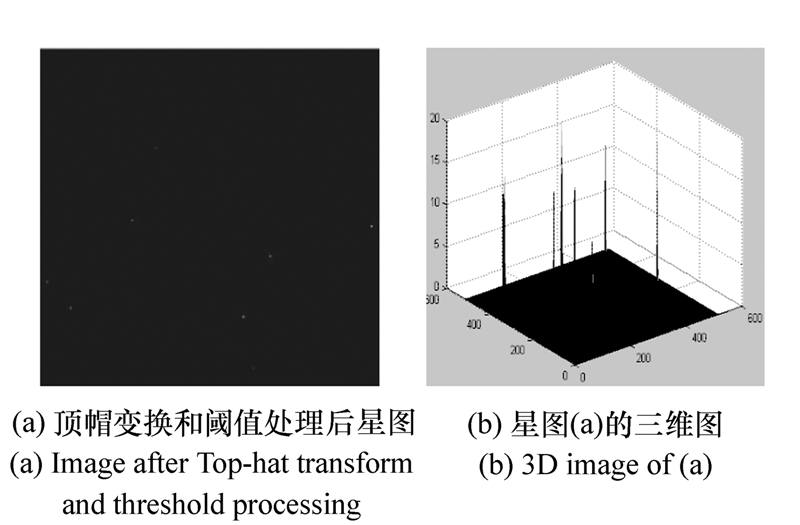
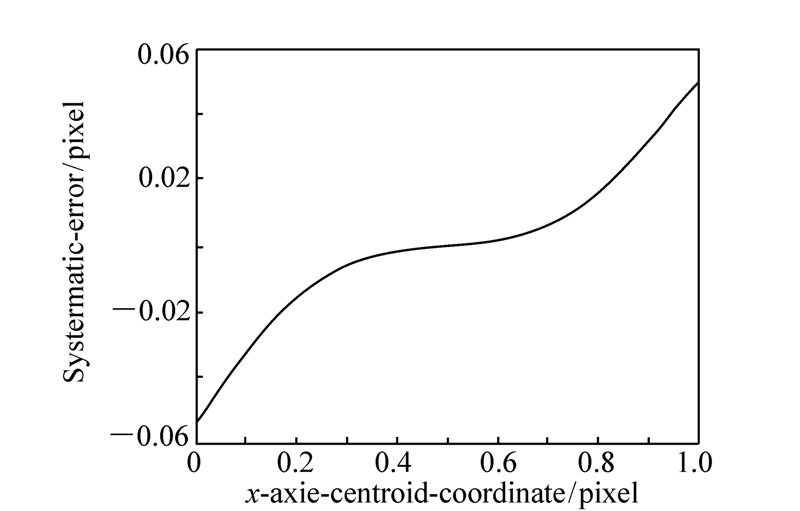
为了实现高精度和高准确性的星图识别和姿态确定,本文对星点提取算法进行了研究,将剪切波变换应用到星点提取技术中。首先,通过利用剪切波变换对星图进行分解,得到不同尺度、不同方向的系数;然后,对剪切系数进行阈值处理并重构得到去噪后的星图,再对重构星图进行顶帽变换和自适应阈值处理,完成星图滤波;最后,通过质心误差补偿法提取星点的坐标,有效地完成星点提取。实验结果表明,采用剪切波变换的星图滤波对噪声去除非常有效;质心误差补偿法的误差在0.003左右,明显优于传统的质心法,基本满足星敏感器的精度高和抗干扰能力强等要求。
为了实现高精度和高准确性的星图识别和姿态确定,本文对星点提取算法进行了研究,将剪切波变换应用到星点提取技术中。首先,通过利用剪切波变换对星图进行分解,得到不同尺度、不同方向的系数;然后,对剪切系数进行阈值处理并重构得到去噪后的星图,再对重构星图进行顶帽变换和自适应阈值处理,完成星图滤波;最后,通过质心误差补偿法提取星点的坐标,有效地完成星点提取。实验结果表明,采用剪切波变换的星图滤波对噪声去除非常有效;质心误差补偿法的误差在0.003左右,明显优于传统的质心法,基本满足星敏感器的精度高和抗干扰能力强等要求。


2015, 8(3): 394-400.
doi: 10.3788/CO.20150803.0394
摘要:
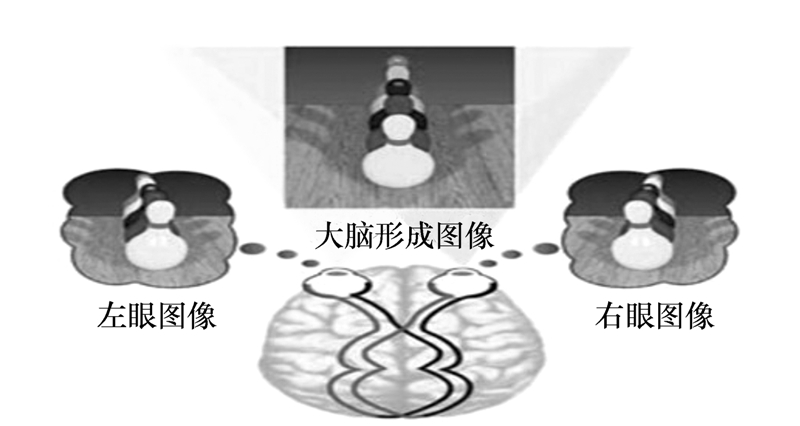
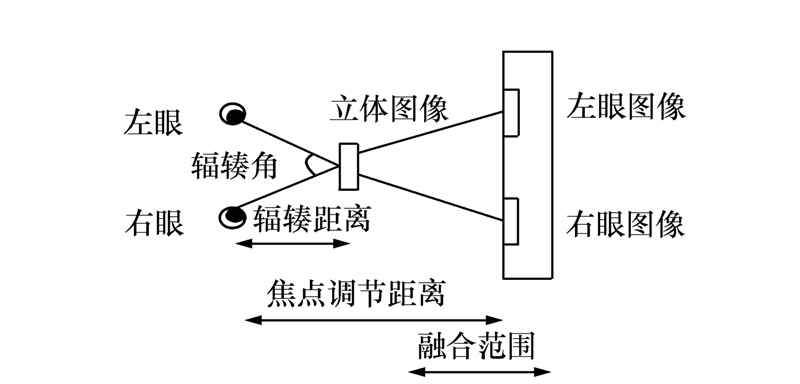
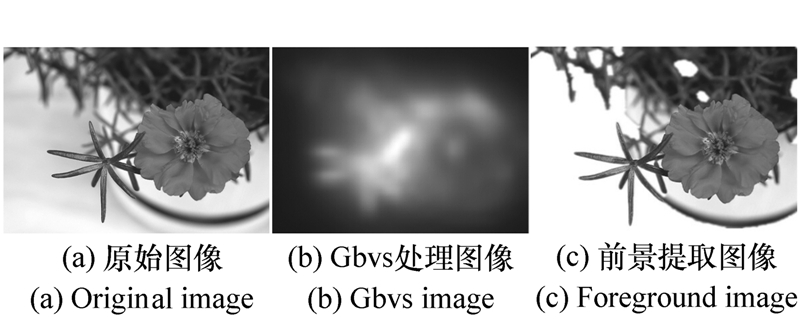
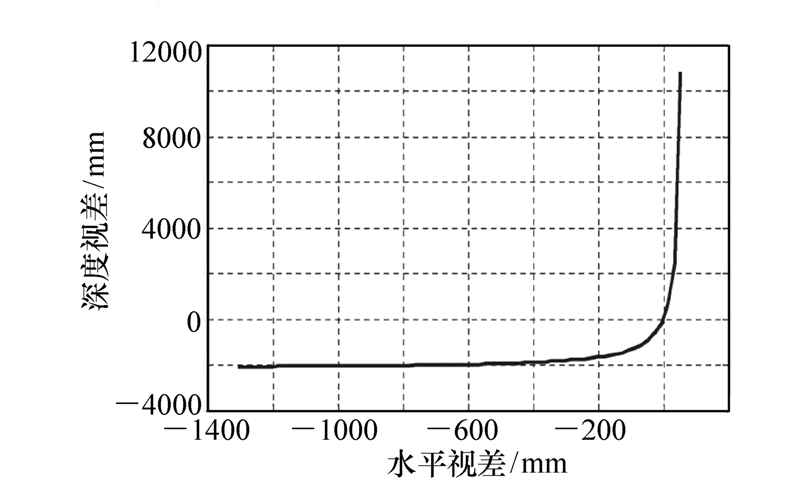
结合立体视频帧左右视图的灰度图,采用鲁棒性算法与软剪刀算法相结合的"画笔"方案来提取立体视频帧的前景区域,合成视差图并提取水平视差,计算深度视差;根据主观评价结果建立视差深度—视觉舒适度模型,再结合亮度对视觉舒适度的评价模型进行优化,使模型的评分更接近人类视觉系统的评分;结合人类主观评价实验的结果,用逆向代入法求出模型的系数确定模型,最终实现基于人类视觉系统特性的对立体视频视觉舒适度的评价。实验结果表明:通过视觉舒适度模型计算得到的结果与人类主观评价结果之间的误差率不超过5%,其中大部分视频误差率不超过1%。说明评价模型更符合人类主观感知结果的立体视频视觉舒适度,模型评分更接近人类视觉系统特性的主观实验评分,这为立体视频舒适度的评价提供了参考。
结合立体视频帧左右视图的灰度图,采用鲁棒性算法与软剪刀算法相结合的"画笔"方案来提取立体视频帧的前景区域,合成视差图并提取水平视差,计算深度视差;根据主观评价结果建立视差深度—视觉舒适度模型,再结合亮度对视觉舒适度的评价模型进行优化,使模型的评分更接近人类视觉系统的评分;结合人类主观评价实验的结果,用逆向代入法求出模型的系数确定模型,最终实现基于人类视觉系统特性的对立体视频视觉舒适度的评价。实验结果表明:通过视觉舒适度模型计算得到的结果与人类主观评价结果之间的误差率不超过5%,其中大部分视频误差率不超过1%。说明评价模型更符合人类主观感知结果的立体视频视觉舒适度,模型评分更接近人类视觉系统特性的主观实验评分,这为立体视频舒适度的评价提供了参考。

2015, 8(3): 401-406.
doi: 10.3788/CO.20150803.0401
摘要:
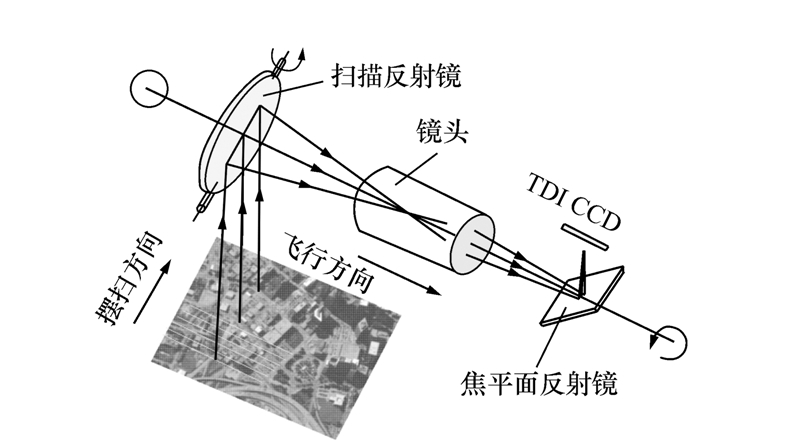
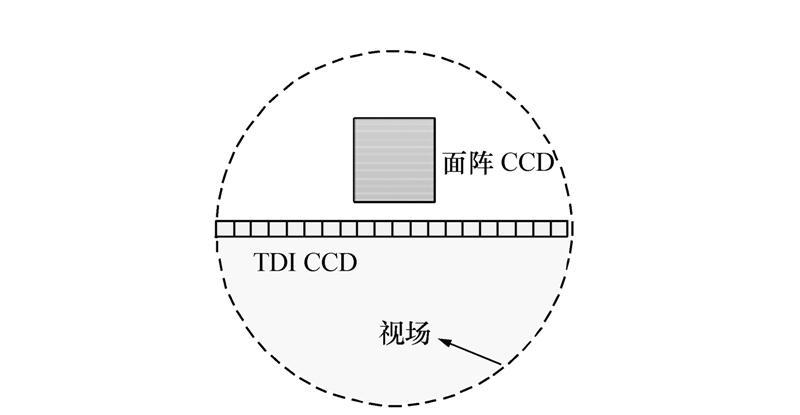
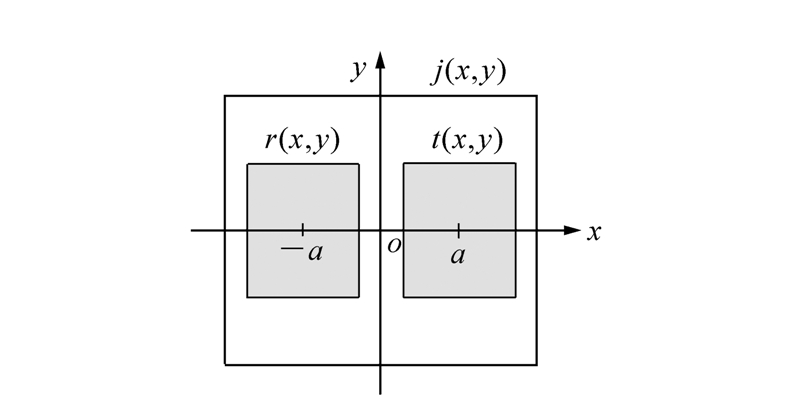
为了提高像移测量精度,针对机载航空摆扫相机提出一种坐标变换法和图像相关法相结合的像移测量方法。利用坐标变换法得到初始像移速度,利用图像联合变换相关法对像移速度残差进行补偿。联合图像通过一个面阵CCD获得,该面阵CCD放置在相机焦平面上并与成像线阵TDI CCD平行,其输出的当前图像与参考图像合并构成联合图像进行二维空间联合变换相关运算,得到像移修正矢量。对该矢量分别在相机摆扫方向和载机飞行方向进行分解,从而得到摆扫像移和前向像移的修正量。仿真实验结果表明,在输入图像信噪比为4 dB时,像移测量误差在0.1 pixel以内。
为了提高像移测量精度,针对机载航空摆扫相机提出一种坐标变换法和图像相关法相结合的像移测量方法。利用坐标变换法得到初始像移速度,利用图像联合变换相关法对像移速度残差进行补偿。联合图像通过一个面阵CCD获得,该面阵CCD放置在相机焦平面上并与成像线阵TDI CCD平行,其输出的当前图像与参考图像合并构成联合图像进行二维空间联合变换相关运算,得到像移修正矢量。对该矢量分别在相机摆扫方向和载机飞行方向进行分解,从而得到摆扫像移和前向像移的修正量。仿真实验结果表明,在输入图像信噪比为4 dB时,像移测量误差在0.1 pixel以内。



2015, 8(3): 407-414.
doi: 10.3788/CO.20150803.0407
摘要:
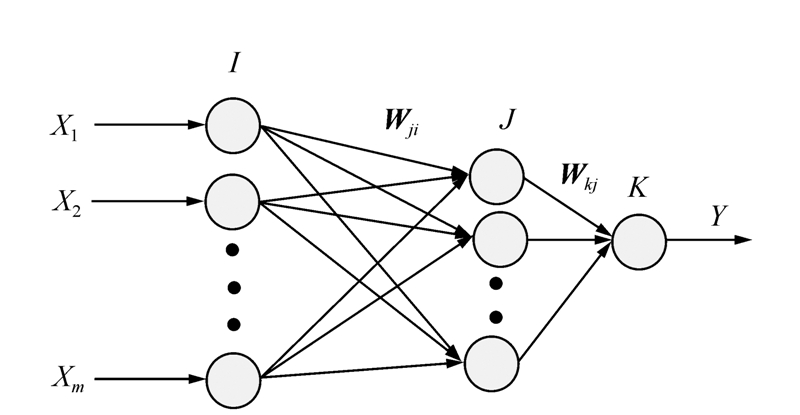
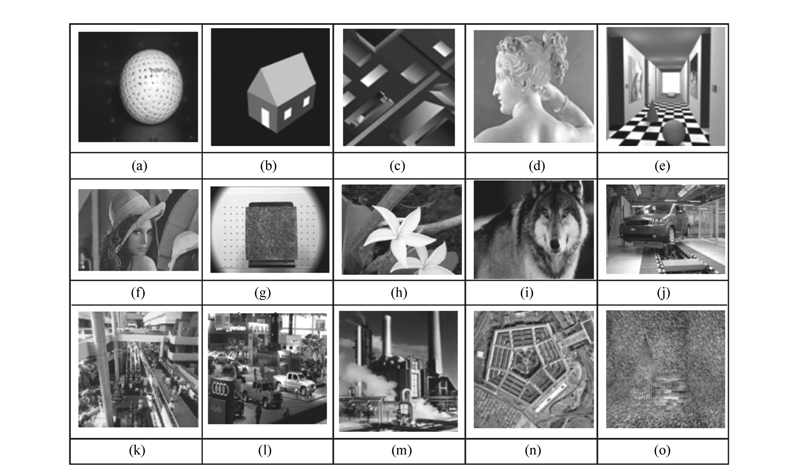
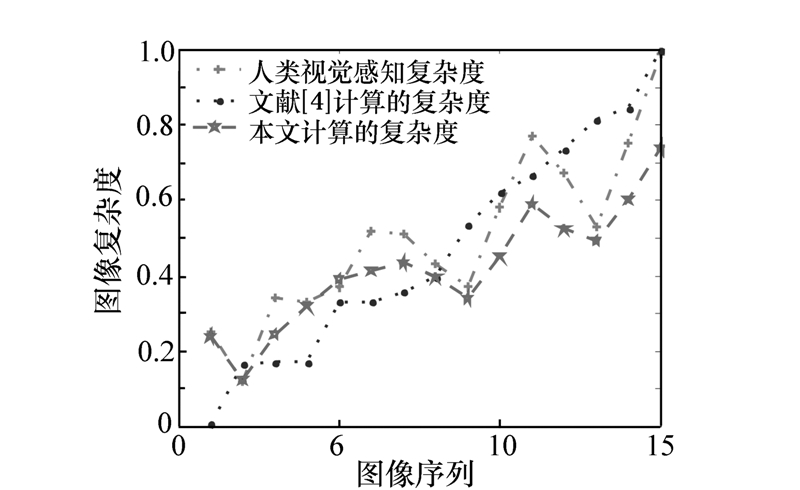
为了更好地描述图像内部的复杂程度,建立图像复杂度与各指标之间的数学模型是研究图像复杂度最关键的一步。首先从图像纹理出发,试图建立图像复杂度与各指标之间定量、精确的数学关系描述。针对目前图像复杂度与各衡量指标之间没有明确的数学关系的特点,文中采用灰度共生矩阵对纹理的主要特征参数进行分析,提出了基于BP神经网络的图像复杂度评价方法,建立了图像复杂度与各个指标之间非线性的数学评价模型。通过大量的图片对神经网络进行训练学习,得到各指标的权重值。验证结果表明,所建评价模型能够真实地反映图像内部的复杂程度,获得的实验结果与人类视觉感知的结果基本一致。对于将BP神经网络应用于图像复杂度的研究具有一定的参考价值。
为了更好地描述图像内部的复杂程度,建立图像复杂度与各指标之间的数学模型是研究图像复杂度最关键的一步。首先从图像纹理出发,试图建立图像复杂度与各指标之间定量、精确的数学关系描述。针对目前图像复杂度与各衡量指标之间没有明确的数学关系的特点,文中采用灰度共生矩阵对纹理的主要特征参数进行分析,提出了基于BP神经网络的图像复杂度评价方法,建立了图像复杂度与各个指标之间非线性的数学评价模型。通过大量的图片对神经网络进行训练学习,得到各指标的权重值。验证结果表明,所建评价模型能够真实地反映图像内部的复杂程度,获得的实验结果与人类视觉感知的结果基本一致。对于将BP神经网络应用于图像复杂度的研究具有一定的参考价值。
2015, 8(3): 415-421.
doi: 10.3788/CO.20150803.0415
摘要:
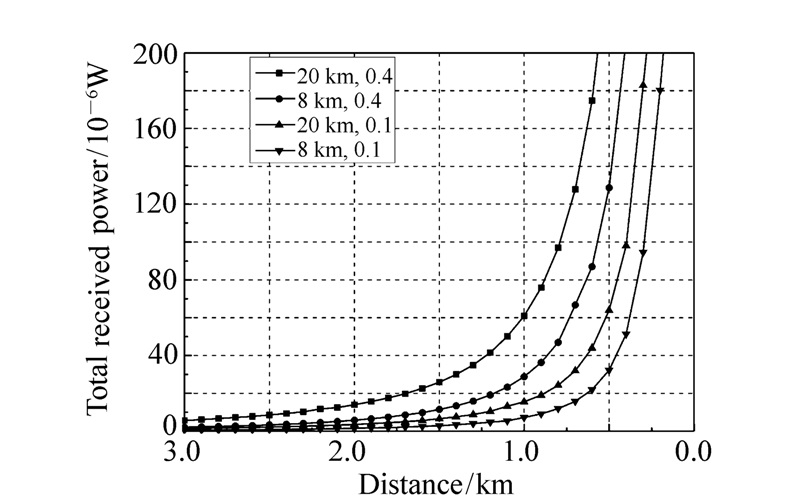
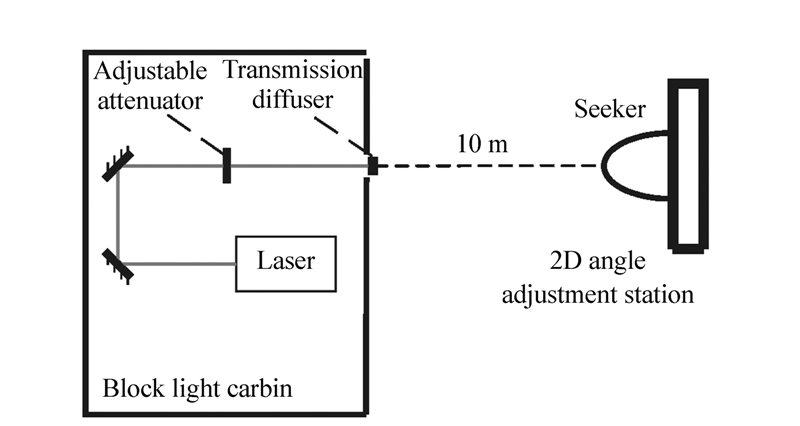
针对全捷联半主动导引头大线性视场的要求,分析了四象限光电系统线性视场与目标距离的关系。首先根据系统参数计算不同能见度、不同目标反射率下的目标距离与导引头接收光功率关系;通过建立光学系统的仿真模型,利用光线追迹方法获得不同视场对应的探测器光敏面光斑功率分布;最后结合探测器灵敏度阈值,得到线性视场与接收激光功率的关系:随着目标距离减小,线性视场从0°增大到光学设计理论值。实验测试结果表明,线性视场随着接收功率增大,从0°增大到±9°,与理论分析一致。因此,全捷联半主动激光制导系统设计应该考虑导引头线性视场变化规律。
针对全捷联半主动导引头大线性视场的要求,分析了四象限光电系统线性视场与目标距离的关系。首先根据系统参数计算不同能见度、不同目标反射率下的目标距离与导引头接收光功率关系;通过建立光学系统的仿真模型,利用光线追迹方法获得不同视场对应的探测器光敏面光斑功率分布;最后结合探测器灵敏度阈值,得到线性视场与接收激光功率的关系:随着目标距离减小,线性视场从0°增大到光学设计理论值。实验测试结果表明,线性视场随着接收功率增大,从0°增大到±9°,与理论分析一致。因此,全捷联半主动激光制导系统设计应该考虑导引头线性视场变化规律。






2015, 8(3): 422-427.
doi: 10.3788/CO.20150803.0422
摘要:
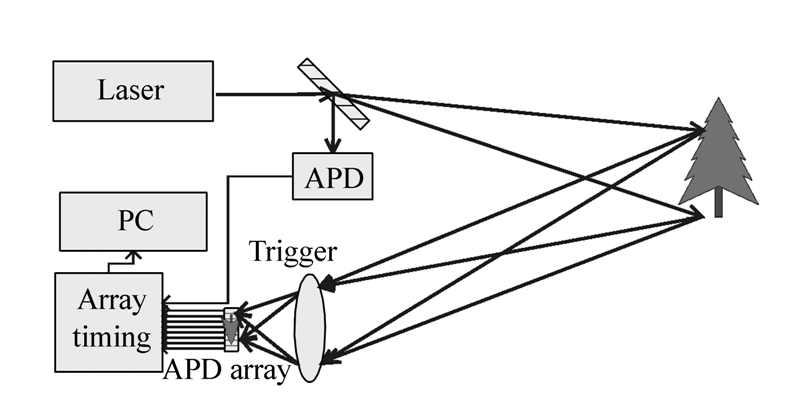
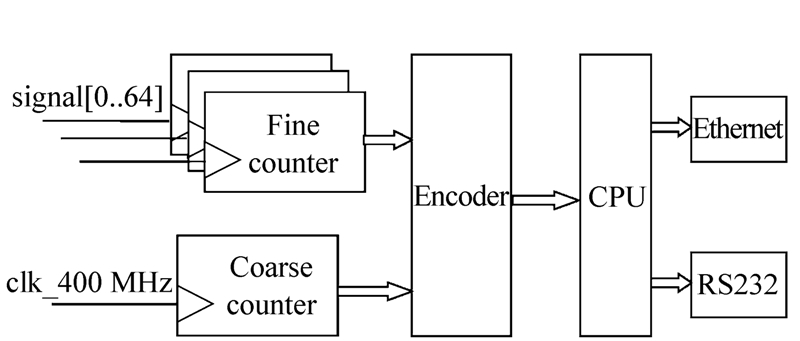
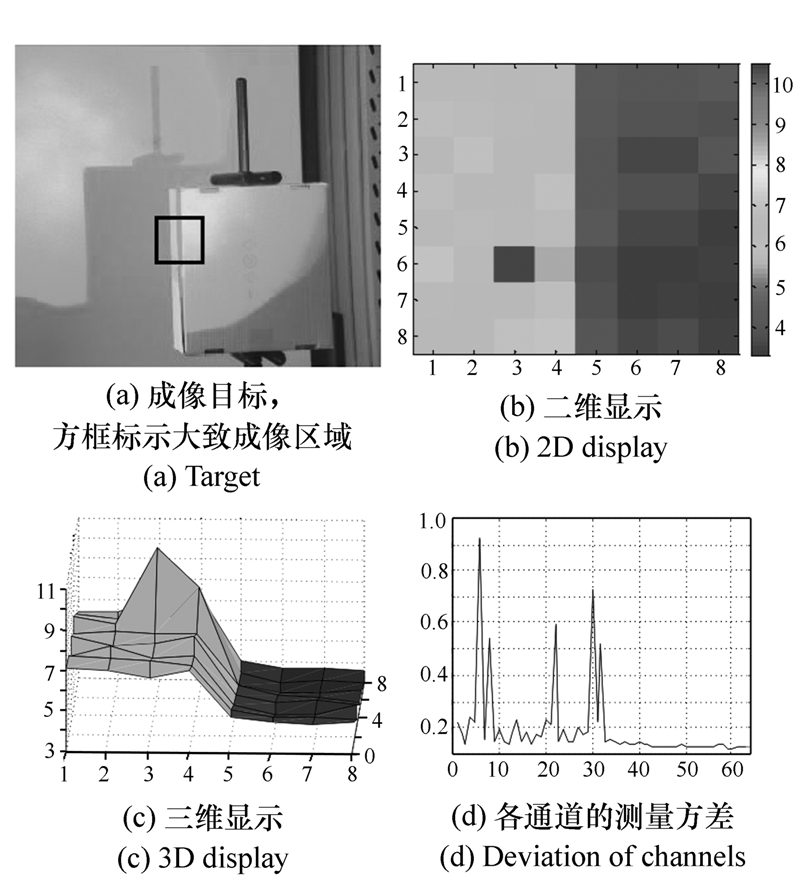
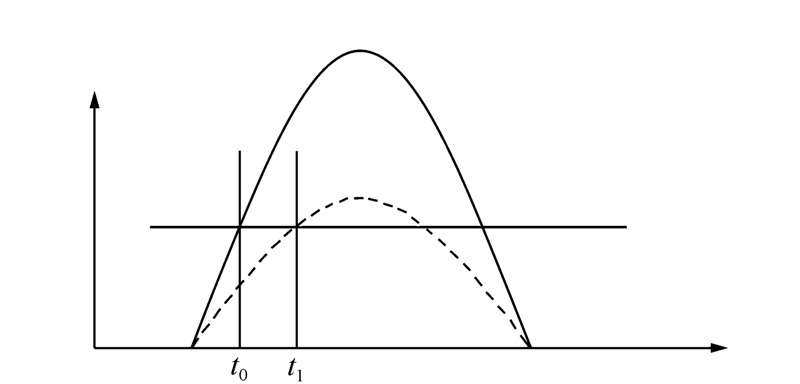
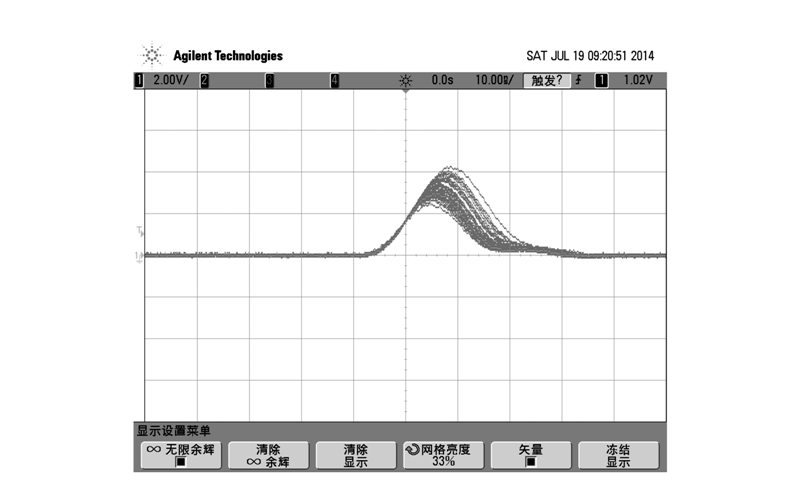
为了实现对目标的无扫描阵列激光三维成像并研究系统参数对三维成像距离分辨率的影响,研制了8×8 pixel激光三维成像接收机。接收机采用线性模式APD阵列,设计了模拟信号放大、阈值处理将回波光信号转换为数字信号后,利用FPGA设计实现64通道高精度阵列计时系统,实现了对目标的无扫描实时三维成像功能。首先对设计完成的三维成像接收机组成及成像原理进行了介绍,对三维成像接收机中APD探测器阵列信号的模拟处理和数字处理流程和实现方式进行了说明。随后分别对三维成像的核心FPGA计时系统及探测器整体进行了电子学测试和实验测试。测试结果表明,FPGA计时子系统的时间分辨率优于140 ps,三维成像系统整体距离分辨率在0.2 m左右。最后对分辨率的误差进行了分析,结果表明,激光回波强度波动是影响此接收机距离分辨率的最主要因素。
为了实现对目标的无扫描阵列激光三维成像并研究系统参数对三维成像距离分辨率的影响,研制了8×8 pixel激光三维成像接收机。接收机采用线性模式APD阵列,设计了模拟信号放大、阈值处理将回波光信号转换为数字信号后,利用FPGA设计实现64通道高精度阵列计时系统,实现了对目标的无扫描实时三维成像功能。首先对设计完成的三维成像接收机组成及成像原理进行了介绍,对三维成像接收机中APD探测器阵列信号的模拟处理和数字处理流程和实现方式进行了说明。随后分别对三维成像的核心FPGA计时系统及探测器整体进行了电子学测试和实验测试。测试结果表明,FPGA计时子系统的时间分辨率优于140 ps,三维成像系统整体距离分辨率在0.2 m左右。最后对分辨率的误差进行了分析,结果表明,激光回波强度波动是影响此接收机距离分辨率的最主要因素。



2015, 8(3): 428-438.
doi: 10.3788/CO.20150803.0428
摘要:
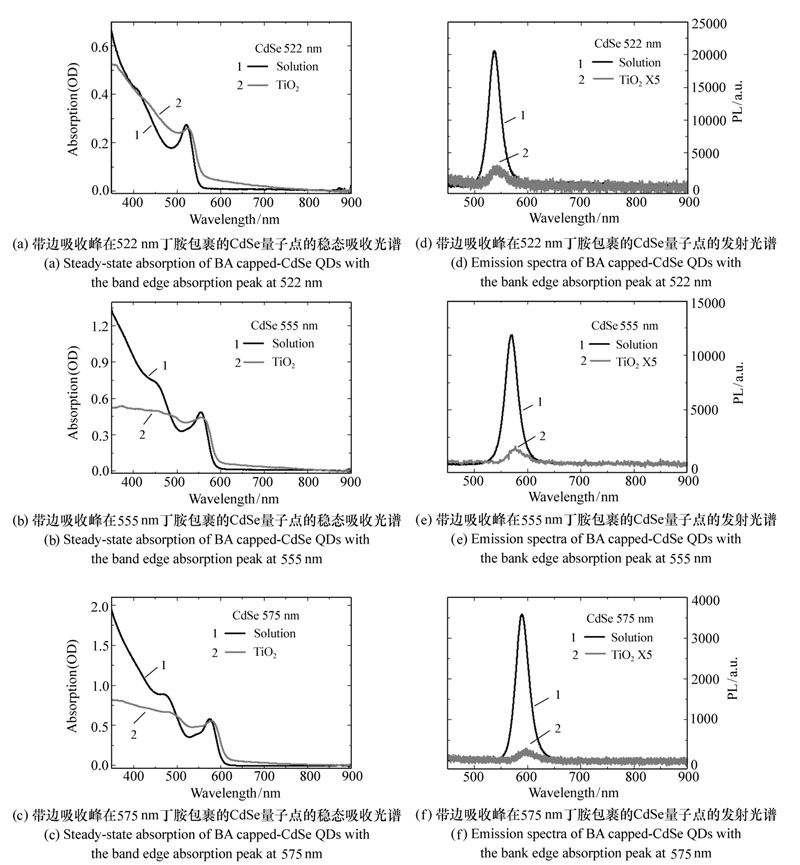
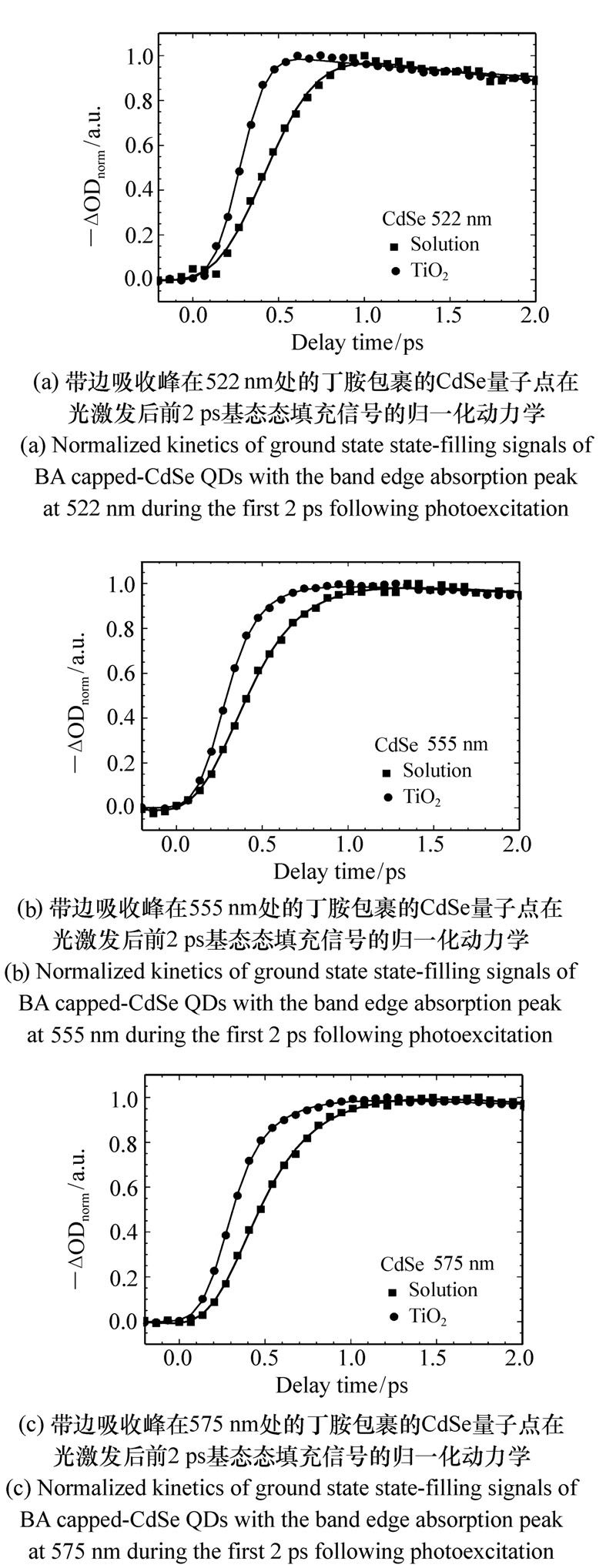
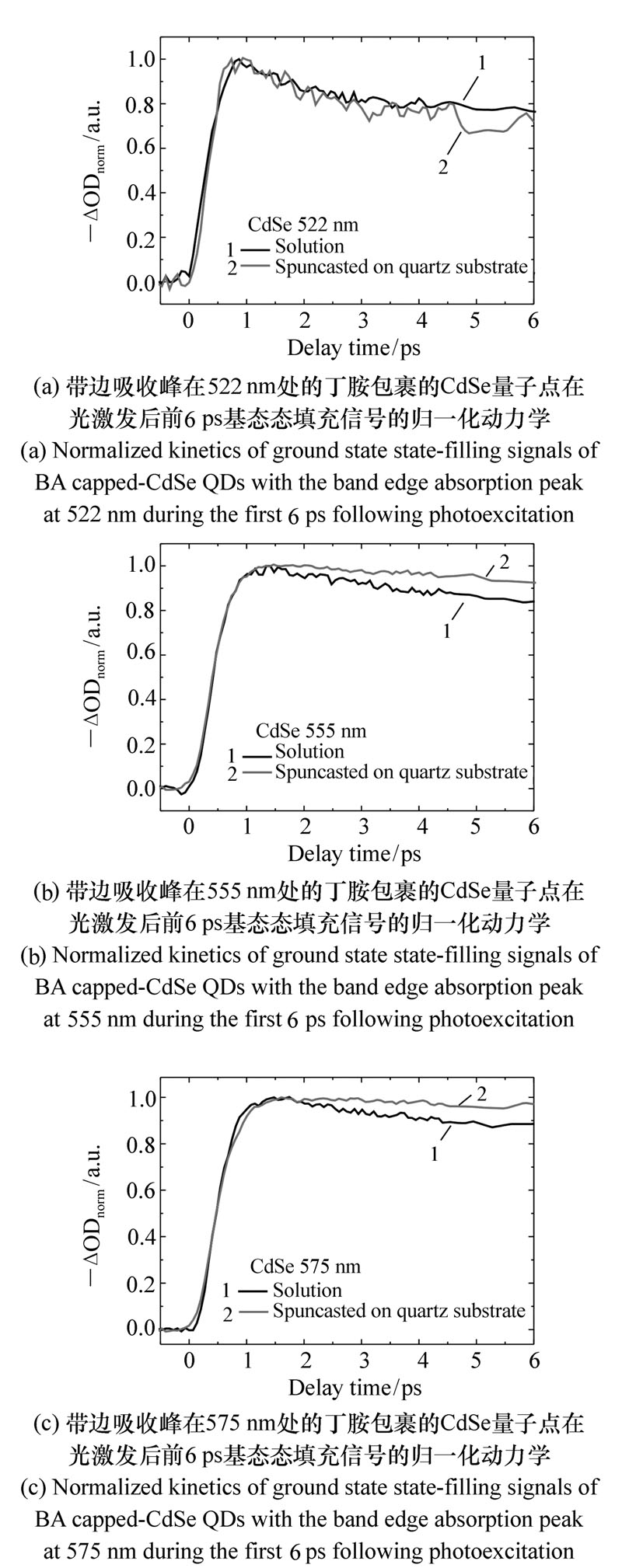
利用超快光谱技术系统研究了在丁胺包裹的CdSe量子点敏化的TiO2纳米晶薄膜起始时刻界面间电子转移动力学。与之前的报道不同,该实验结果表明:CdSe量子点经过表面修饰后,两相电子注入机制——热电子和冷电子注入得以被证实,即:电子能分别从CdSe量子点导带中高的振动能级和导带底转移到TiO2的导带。该机制详细描绘了电子在纳米界面间转移的图景。进一步研究发现:热电子注入的电子耦合强度(3.6±0.1 meV)比弛豫后的基态电子注入高两个数量级,基于Marcus理论,伴随着0.083 eV的重组能,冷电子注入的耦合强度值为~50 μeV。
利用超快光谱技术系统研究了在丁胺包裹的CdSe量子点敏化的TiO2纳米晶薄膜起始时刻界面间电子转移动力学。与之前的报道不同,该实验结果表明:CdSe量子点经过表面修饰后,两相电子注入机制——热电子和冷电子注入得以被证实,即:电子能分别从CdSe量子点导带中高的振动能级和导带底转移到TiO2的导带。该机制详细描绘了电子在纳米界面间转移的图景。进一步研究发现:热电子注入的电子耦合强度(3.6±0.1 meV)比弛豫后的基态电子注入高两个数量级,基于Marcus理论,伴随着0.083 eV的重组能,冷电子注入的耦合强度值为~50 μeV。




2015, 8(3): 439-446.
doi: 10.3788/CO.20150803.0439
摘要:
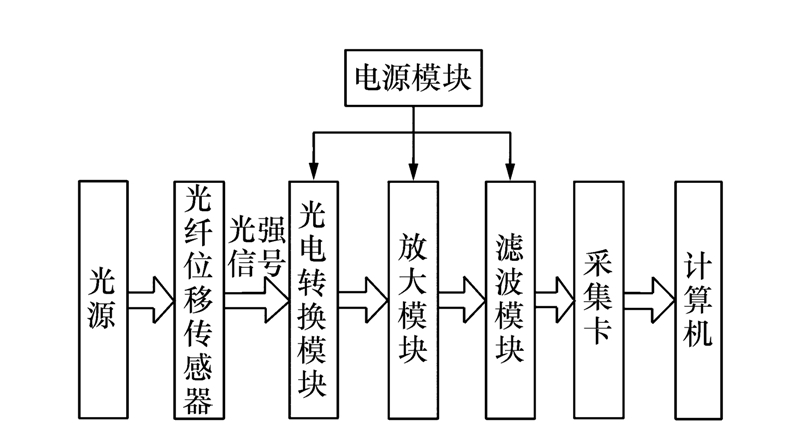
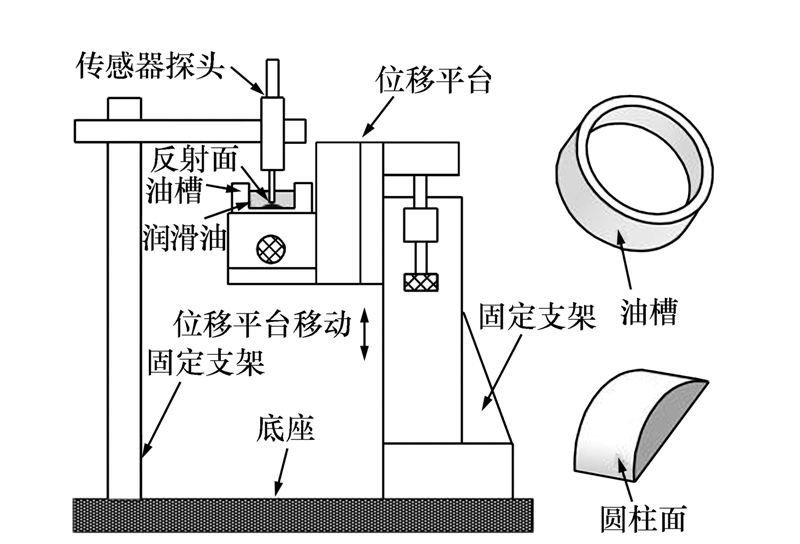
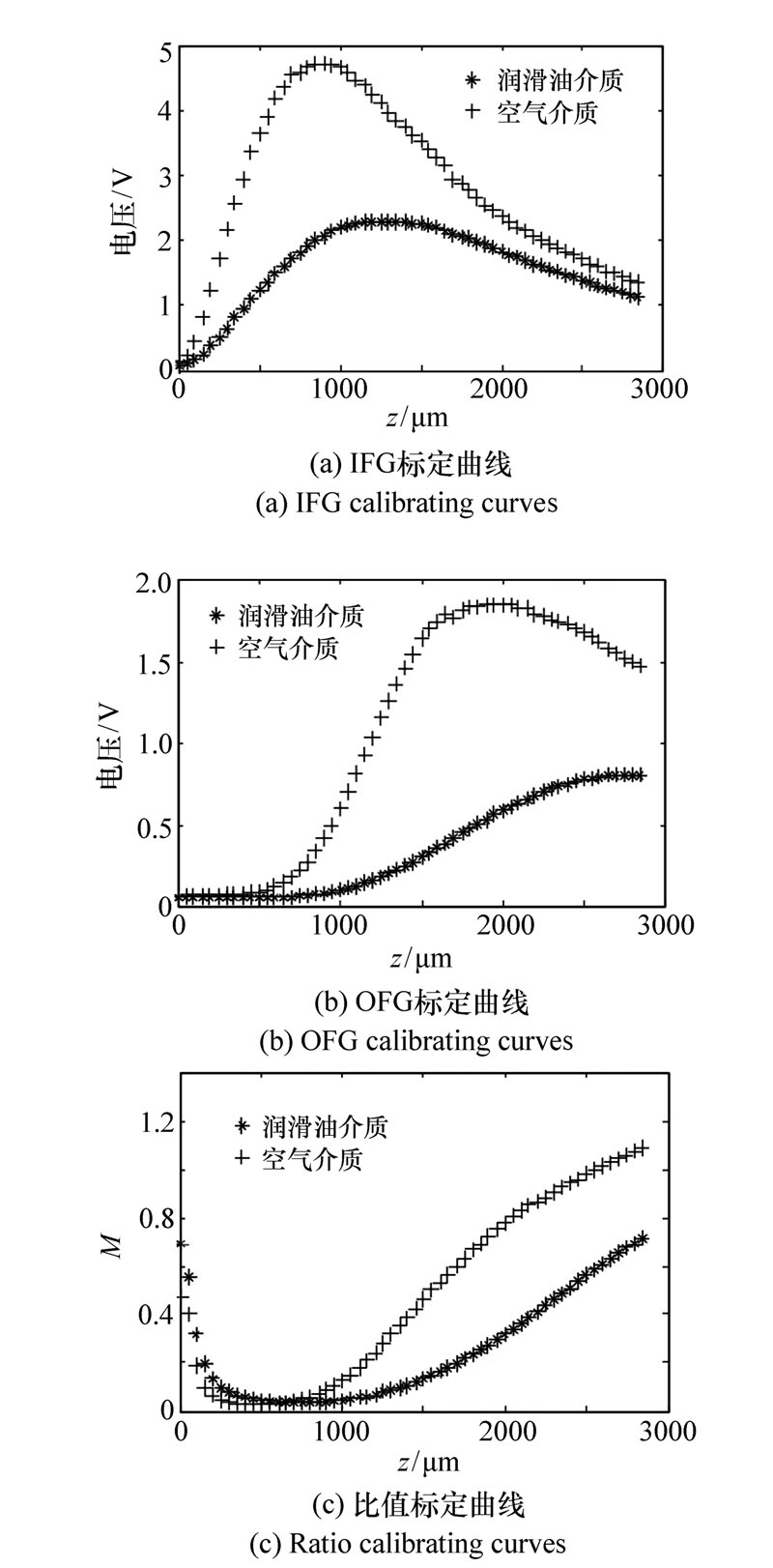
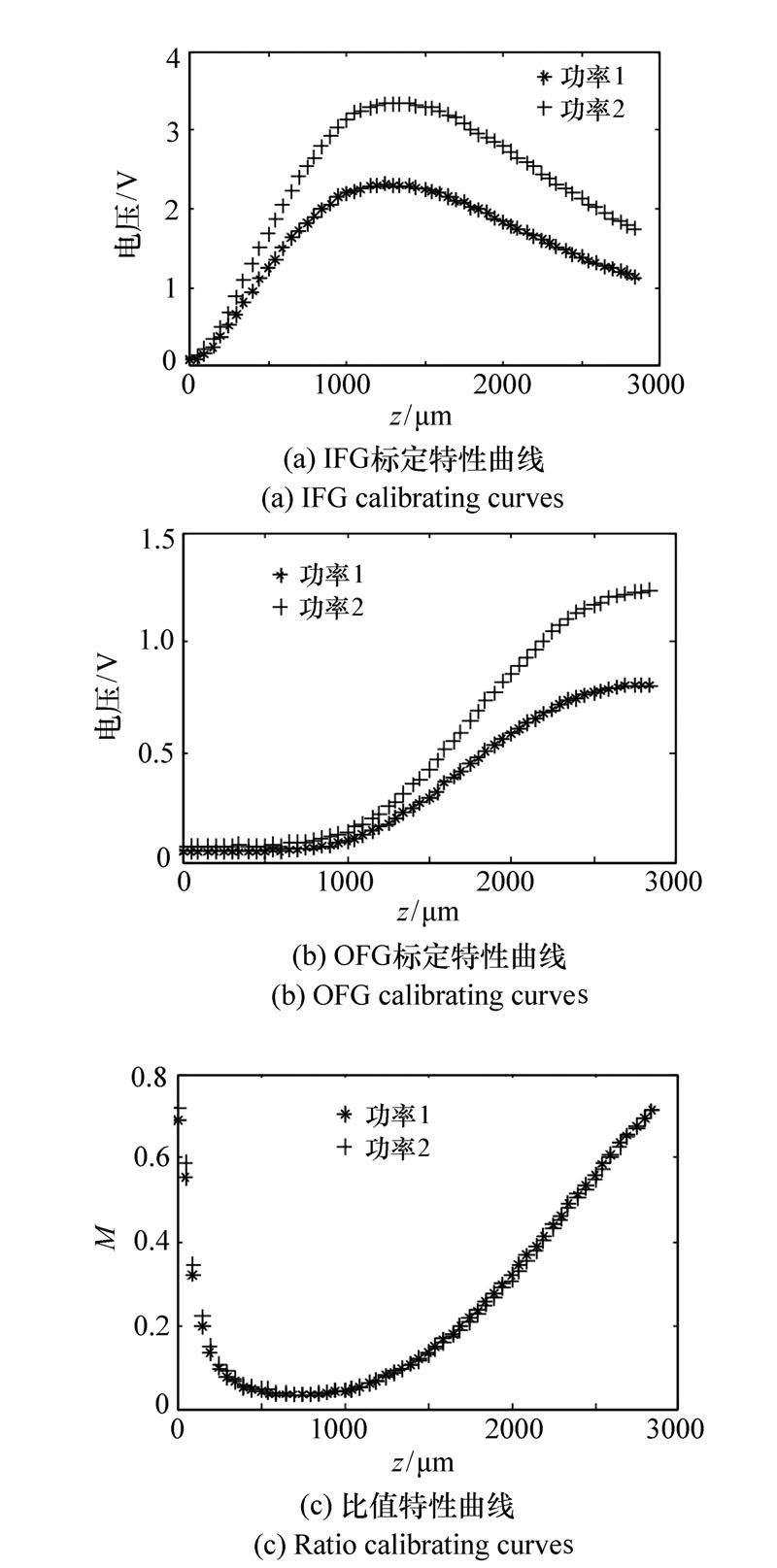
针对双圈同轴式光纤(TCCOF)位移传感器用于滑动轴承油膜厚度检测时,由于传播介质为润滑油,传感器输出特性会受到影响,本文根据折射定律分析了传播介质对光纤最大入射角的影响,考虑传播过程中的光损并利用光场的准高斯分布规律建立了润滑油环境下的传感器数学模型,同时通过仿真计算得到了传播介质不同时的传感器输出特性。在此基础上,搭建了相应的传感器标定实验平台进行验证。结果表明:空气中TCCOF传感器的灵敏度为0.691/mm,润滑油中TCCOF传感器的灵敏度为0.464/mm;TCCOF传感器在润滑油测量环境中可减小光功率不同对传感器特性的影响;TCCOF传感器灵敏度随着反射面曲率半径的增大而增大;由于具有对称结构,当反射面为圆柱面时,TCCOF传感器可减小探头周向安装角度对其输出特性的影响。因此,在利用TCCOF传感器进行油膜厚度检测时,必须在相应润滑油环境下及相应的反射面情况下进行传感器标定。
针对双圈同轴式光纤(TCCOF)位移传感器用于滑动轴承油膜厚度检测时,由于传播介质为润滑油,传感器输出特性会受到影响,本文根据折射定律分析了传播介质对光纤最大入射角的影响,考虑传播过程中的光损并利用光场的准高斯分布规律建立了润滑油环境下的传感器数学模型,同时通过仿真计算得到了传播介质不同时的传感器输出特性。在此基础上,搭建了相应的传感器标定实验平台进行验证。结果表明:空气中TCCOF传感器的灵敏度为0.691/mm,润滑油中TCCOF传感器的灵敏度为0.464/mm;TCCOF传感器在润滑油测量环境中可减小光功率不同对传感器特性的影响;TCCOF传感器灵敏度随着反射面曲率半径的增大而增大;由于具有对称结构,当反射面为圆柱面时,TCCOF传感器可减小探头周向安装角度对其输出特性的影响。因此,在利用TCCOF传感器进行油膜厚度检测时,必须在相应润滑油环境下及相应的反射面情况下进行传感器标定。





2015, 8(3): 447-455.
doi: 10.3788/CO.20150803.0447
摘要:
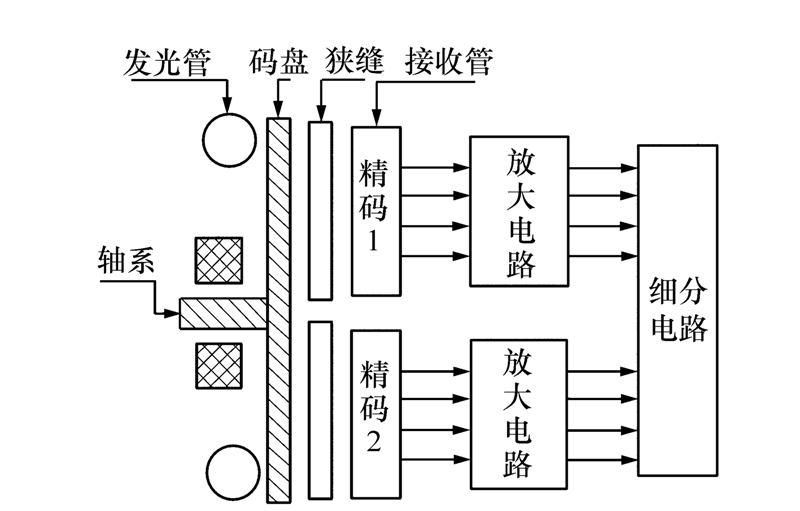
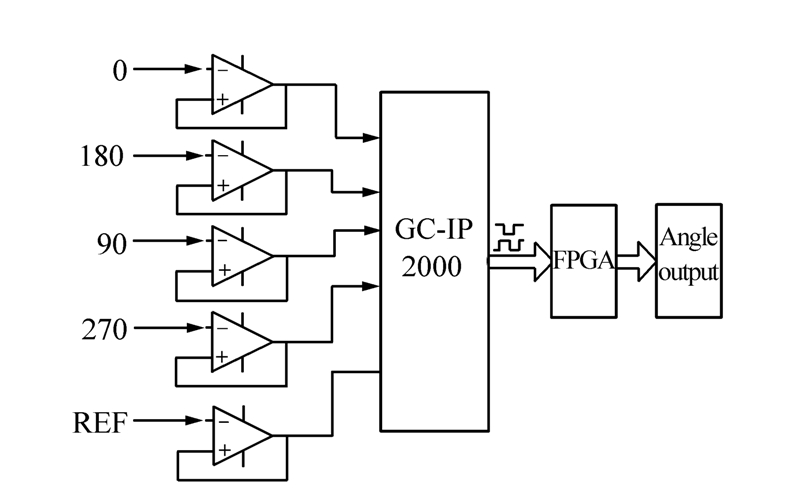
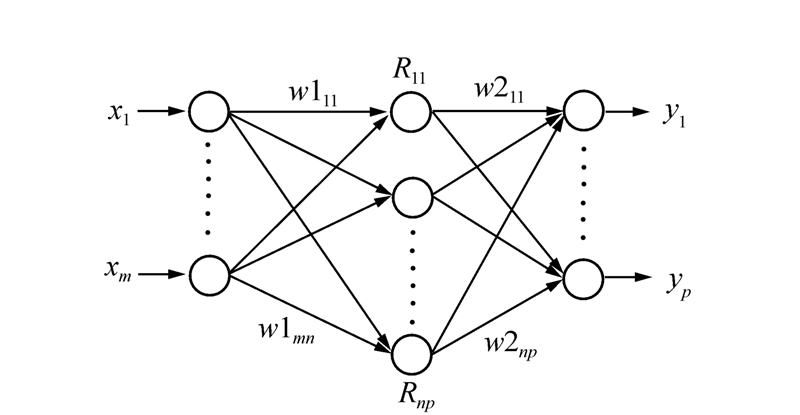
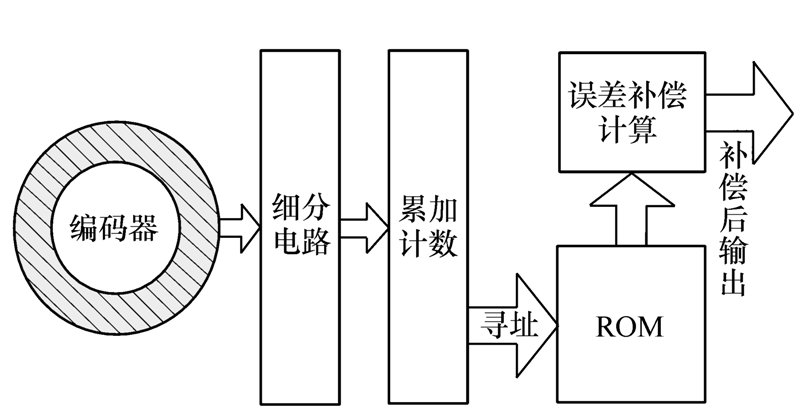
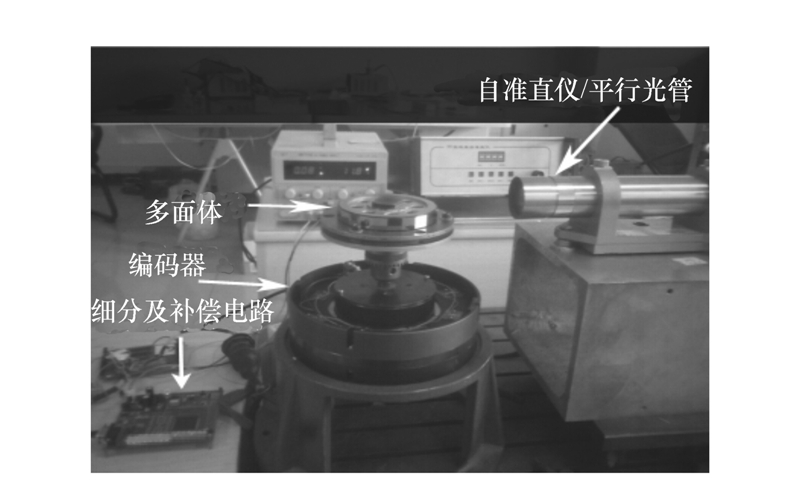
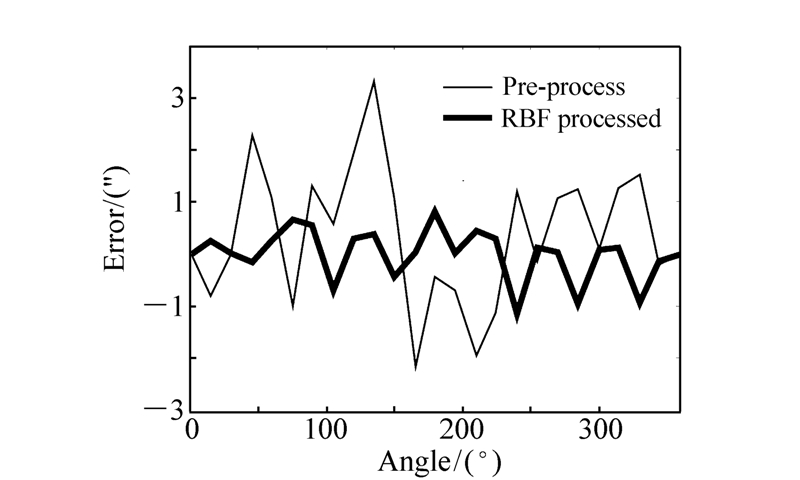
在编码器动态特性检测中,角度基准的快速反应和精度直接影响着动态特性检测装置的准确性。为实现角度基准的快速响应,提高基准编码器的测角精度,本文设计了高精度快速细分角度基准编码器。首先,通过对目前角度基准不足对编码器动态特性检测影响的分析,得出动态检测精度主要受基准编码器的数据处理延时影响。其次,通过对基准编码器结构、细分电路、处理电路等的设计,完成了23位高实时性角度基准编码器的制作。最后,为提高检测精度,利用RBF神经网络对角度基准进行误差补偿。所设计的角度基准编码器分辨率达到0.15",并且可以在10 r/s速度时,保证逐分辨率输出。经过测量,补偿前基准编码器的精度为1.30",补偿后的基准编码器误差峰峰值不超过2.5",精度优于0.6"。高精度、高实时性角度基准编码器的研制,提高了编码器动态特性检测系统的检测精度,为研究编码器动态特性提供了基础。
在编码器动态特性检测中,角度基准的快速反应和精度直接影响着动态特性检测装置的准确性。为实现角度基准的快速响应,提高基准编码器的测角精度,本文设计了高精度快速细分角度基准编码器。首先,通过对目前角度基准不足对编码器动态特性检测影响的分析,得出动态检测精度主要受基准编码器的数据处理延时影响。其次,通过对基准编码器结构、细分电路、处理电路等的设计,完成了23位高实时性角度基准编码器的制作。最后,为提高检测精度,利用RBF神经网络对角度基准进行误差补偿。所设计的角度基准编码器分辨率达到0.15",并且可以在10 r/s速度时,保证逐分辨率输出。经过测量,补偿前基准编码器的精度为1.30",补偿后的基准编码器误差峰峰值不超过2.5",精度优于0.6"。高精度、高实时性角度基准编码器的研制,提高了编码器动态特性检测系统的检测精度,为研究编码器动态特性提供了基础。




2015, 8(3): 456-463.
doi: 10.3788/CO.20150803.0456
摘要:
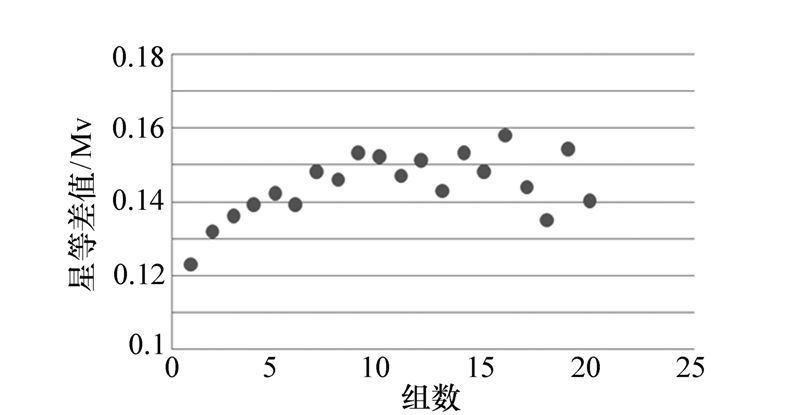
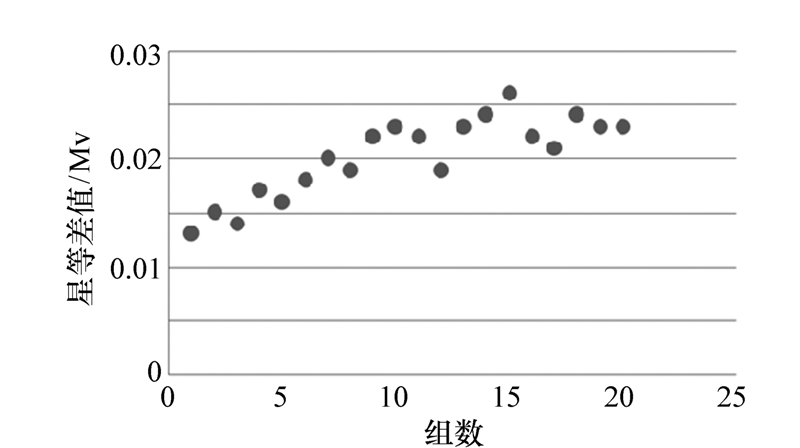
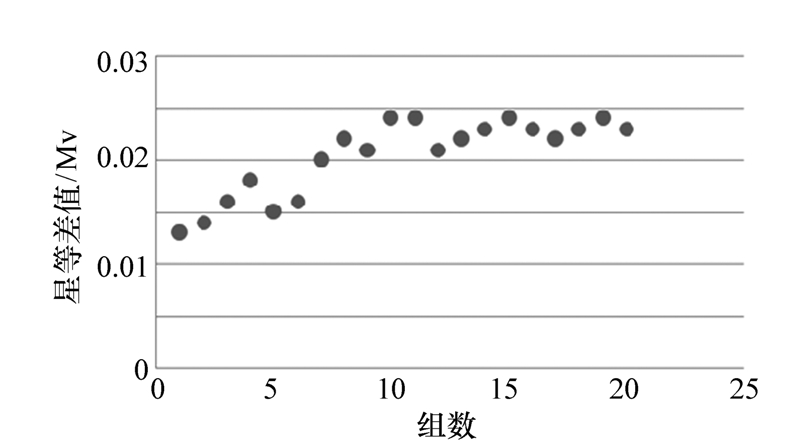
介绍了地基测量空间目标光度的两种方式。首先介绍了系统组成及对比测量原理,然后基于工程角度分析提出了宽谱段测量和滤光片测量两种方式,并给出了两种测量方式的误差分析。若G型恒星及空间目标在同一视场可选择宽谱段测量方式,若途经天区G型定标星较少,可以选择滤光片测量方式。外场实验验证表明,宽谱段测量方式信噪比较高,可探测的极限星等为16等星,在天气条件较好的情况下测量精度在0.15星等左右,而滤光片测量方式由于探测到的能量较少,在相同信噪比下可探测极限星等为14等星,天气变化较小条件下测量精度在0.02星等左右,两种测量方式误差相当,但宽谱段测量方式定标恒星数量增加2.4倍,便于数据处理与计算。
介绍了地基测量空间目标光度的两种方式。首先介绍了系统组成及对比测量原理,然后基于工程角度分析提出了宽谱段测量和滤光片测量两种方式,并给出了两种测量方式的误差分析。若G型恒星及空间目标在同一视场可选择宽谱段测量方式,若途经天区G型定标星较少,可以选择滤光片测量方式。外场实验验证表明,宽谱段测量方式信噪比较高,可探测的极限星等为16等星,在天气条件较好的情况下测量精度在0.15星等左右,而滤光片测量方式由于探测到的能量较少,在相同信噪比下可探测极限星等为14等星,天气变化较小条件下测量精度在0.02星等左右,两种测量方式误差相当,但宽谱段测量方式定标恒星数量增加2.4倍,便于数据处理与计算。



2015, 8(3): 464-470.
doi: 10.3788/CO.20150803.0464
摘要:
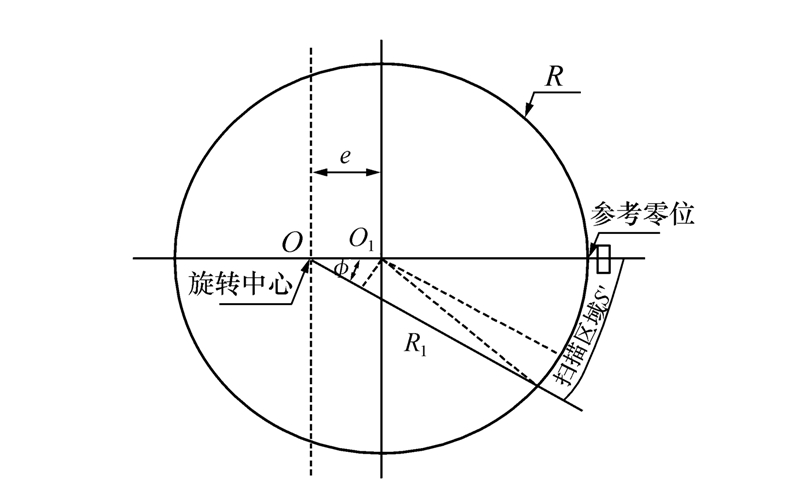
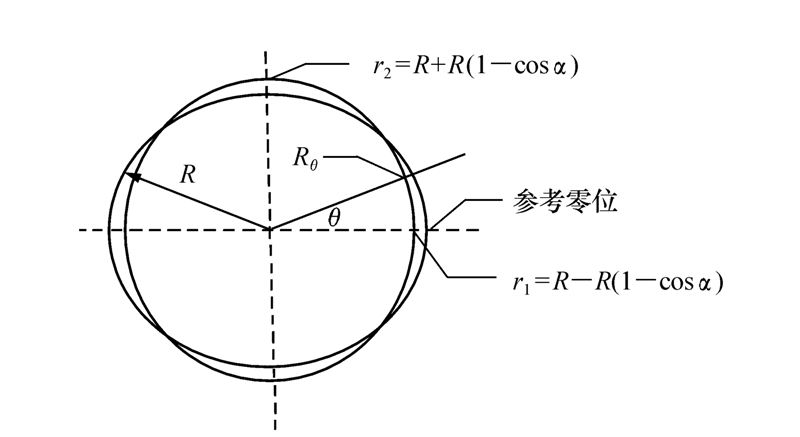
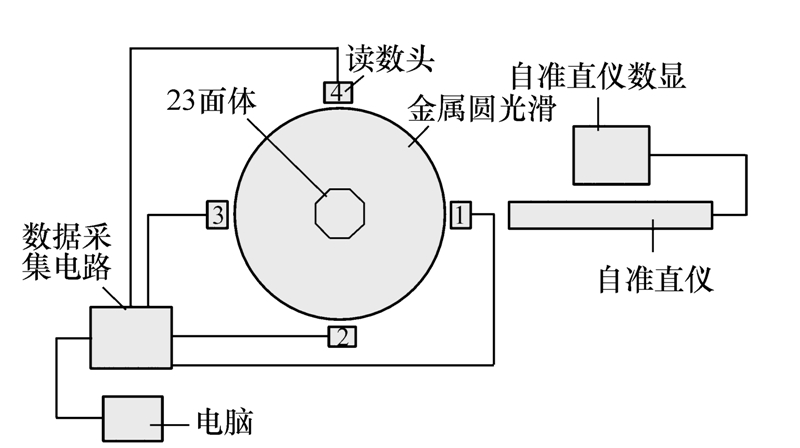
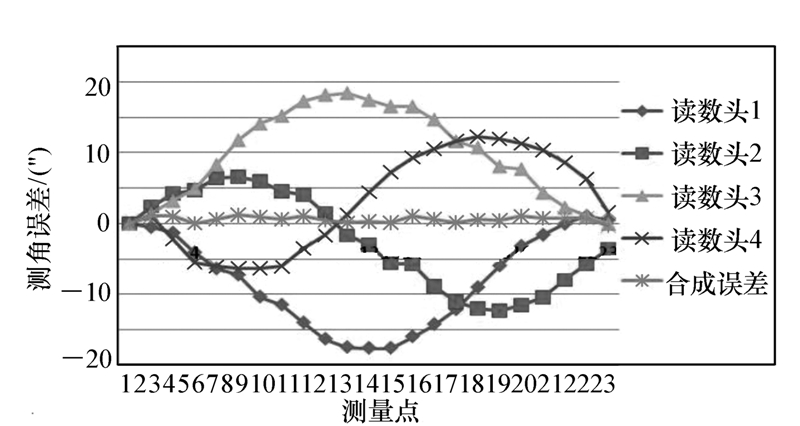
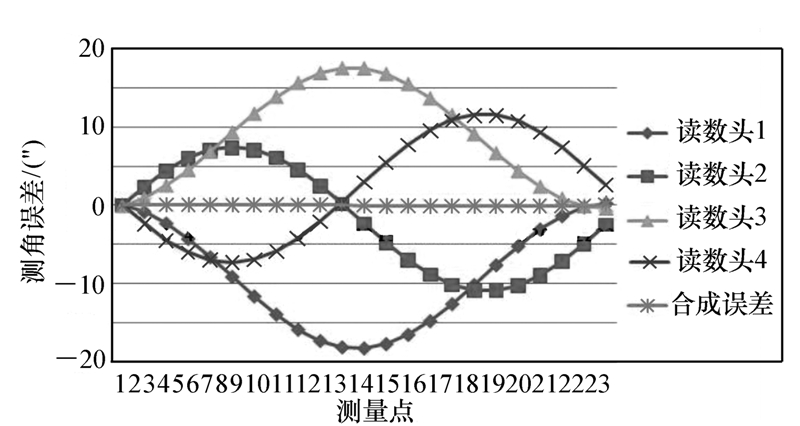
根据望远镜测角系统的精度需求,分析了影响拼接式编码器测角精度的误差源,以及多读数头测角消差原理,确定了采用相位相差90°的4读数头的测角方式。在某望远镜方位轴系转台进行了逆时针和顺时针方向的测角试验,通过对测角数据进行谐波分析并补偿后,得到两组实验测角误差RMS分别为0.34"、0.38"。实验表明,相位相差90°的均布4读数头的测角方式消除了由轴系误差、编码器安装位置误差和钢带安装盘部分圆度误差对测角精度的影响,实现了亚角秒级测角的目的。研究结果可用于大口径望远镜设计阶段的误差分析与分配、预估测角精度,为降低设计和加工误差提供参考。
根据望远镜测角系统的精度需求,分析了影响拼接式编码器测角精度的误差源,以及多读数头测角消差原理,确定了采用相位相差90°的4读数头的测角方式。在某望远镜方位轴系转台进行了逆时针和顺时针方向的测角试验,通过对测角数据进行谐波分析并补偿后,得到两组实验测角误差RMS分别为0.34"、0.38"。实验表明,相位相差90°的均布4读数头的测角方式消除了由轴系误差、编码器安装位置误差和钢带安装盘部分圆度误差对测角精度的影响,实现了亚角秒级测角的目的。研究结果可用于大口径望远镜设计阶段的误差分析与分配、预估测角精度,为降低设计和加工误差提供参考。



2015, 8(3): 471-479.
doi: 10.3788/CO.20150803.0471
摘要:
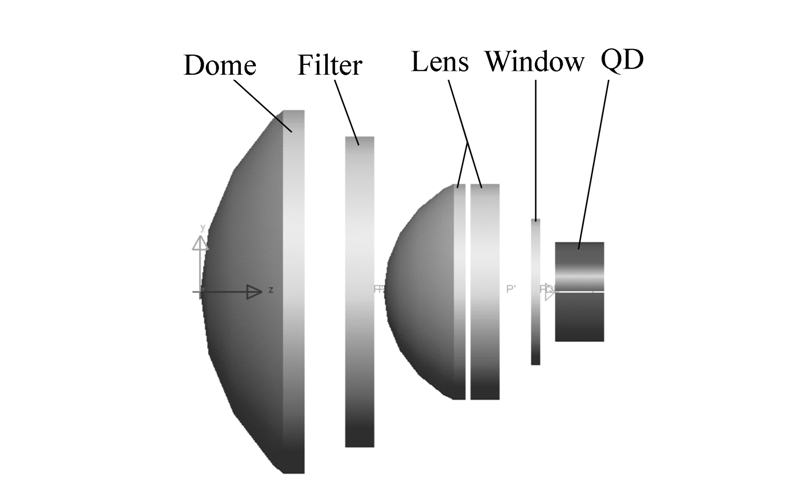
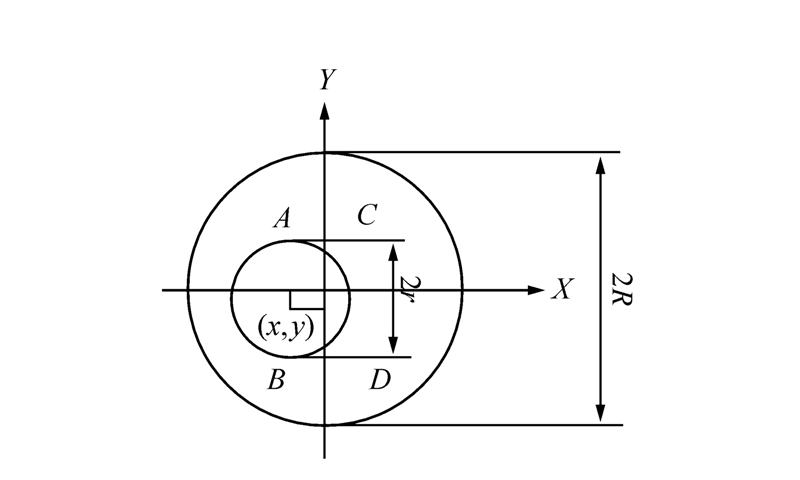
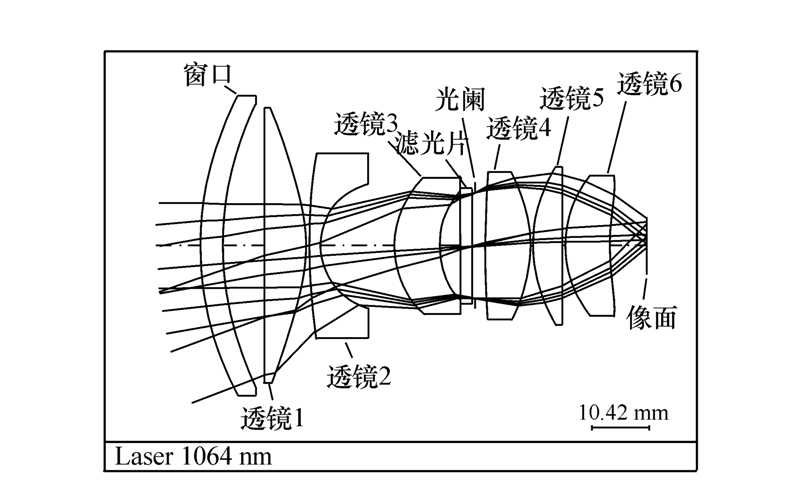
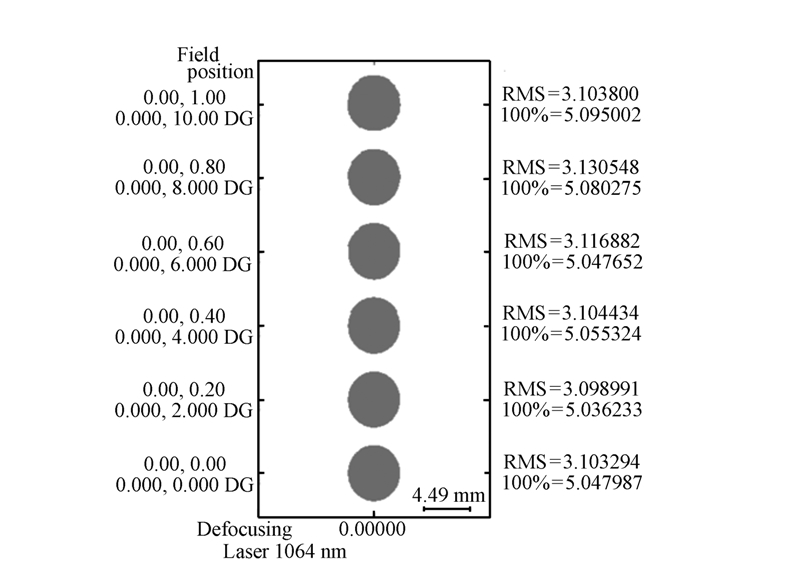
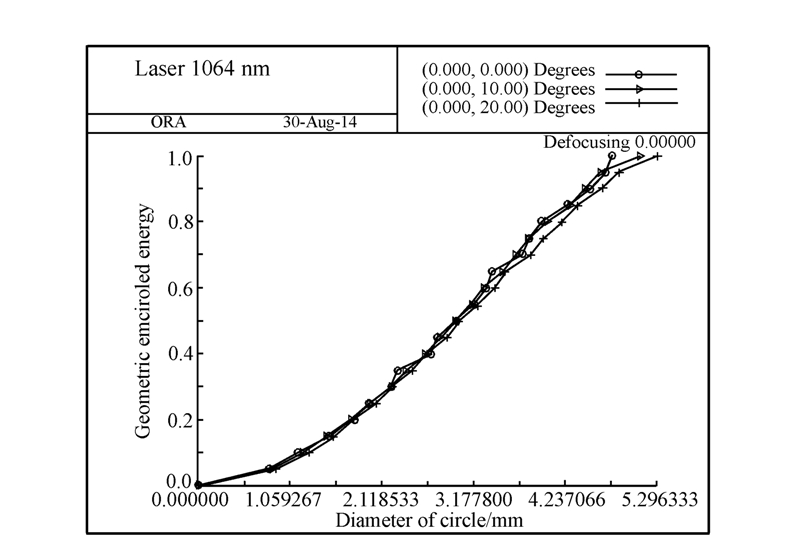
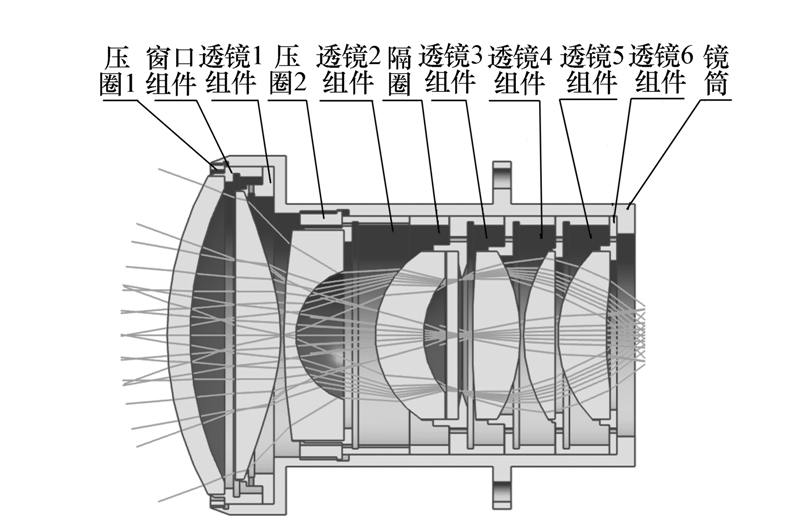
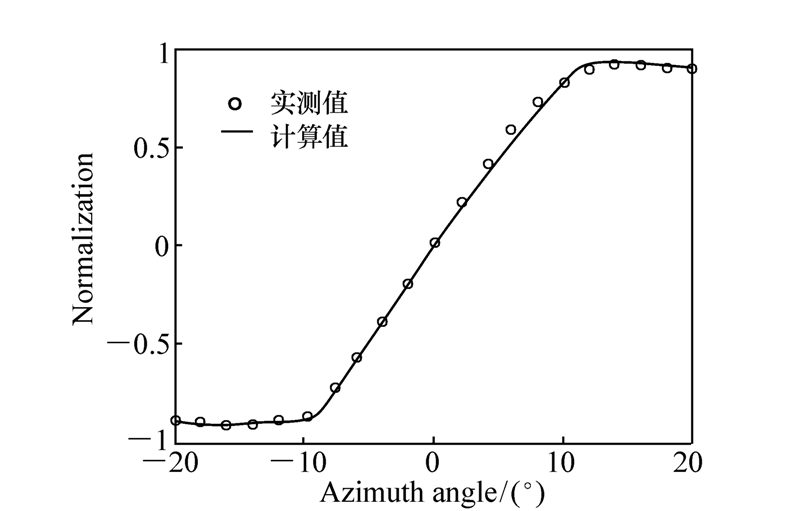
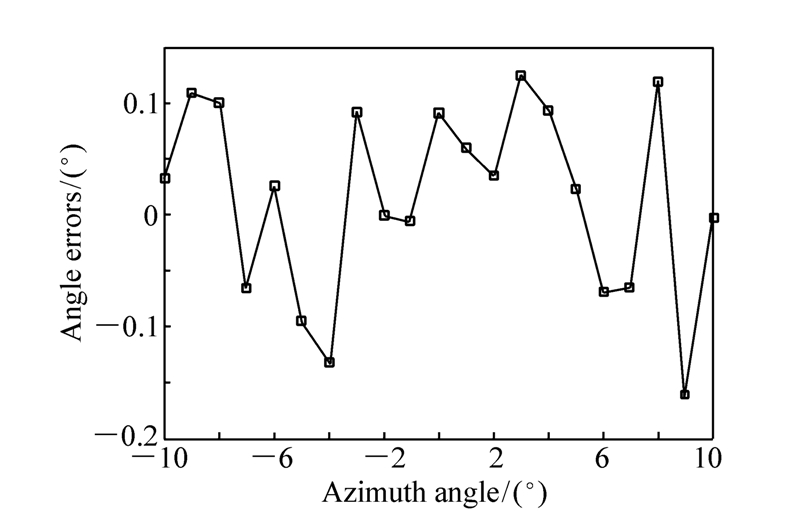
为了满足激光制导对大视场、高线性度探测的性能要求,基于激光制导炸弹的应用需求,介绍了四象限探测器的工作原理和特点,分析了光斑大小、能量均匀性、线性度、探测距离等参数对探测精度的影响;结合系统性能指标,选择了合理的光学系统结构类型,完成了光学系统设计和光机结构设计;利用畸变、点列图、足迹图、能量集中度等指标对系统性能进行了评价,并分析了目标大小和探测距离对光斑大小的影响。测试结果表明,激光导引镜头总视场为±20°、线性视场为±10°、目标大小为1.5~2.4 m、探测距离为50 m~4 km、测角精度优于0.2°,能够满足激光导引的需求。
为了满足激光制导对大视场、高线性度探测的性能要求,基于激光制导炸弹的应用需求,介绍了四象限探测器的工作原理和特点,分析了光斑大小、能量均匀性、线性度、探测距离等参数对探测精度的影响;结合系统性能指标,选择了合理的光学系统结构类型,完成了光学系统设计和光机结构设计;利用畸变、点列图、足迹图、能量集中度等指标对系统性能进行了评价,并分析了目标大小和探测距离对光斑大小的影响。测试结果表明,激光导引镜头总视场为±20°、线性视场为±10°、目标大小为1.5~2.4 m、探测距离为50 m~4 km、测角精度优于0.2°,能够满足激光导引的需求。



2015, 8(3): 480-498.
doi: 10.3788/CO.20150803.0480
摘要:
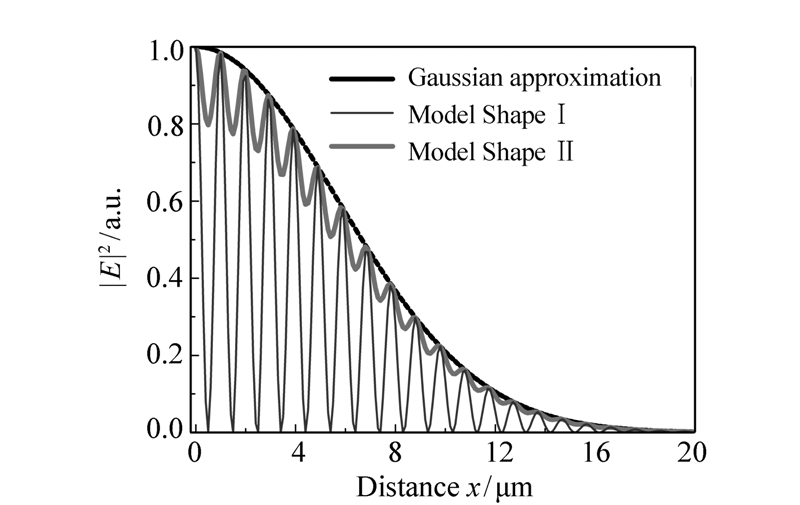
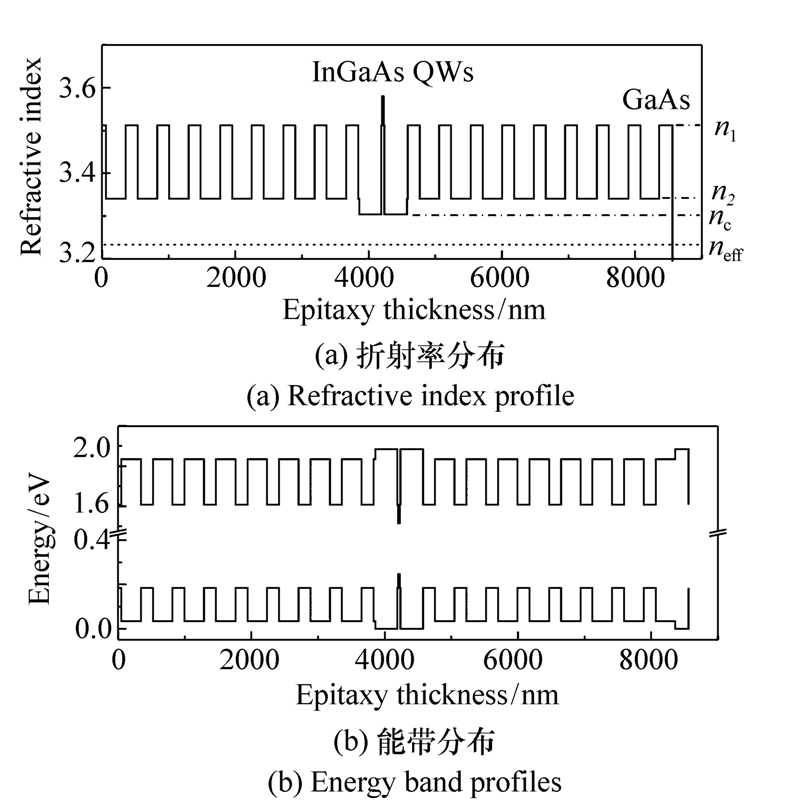
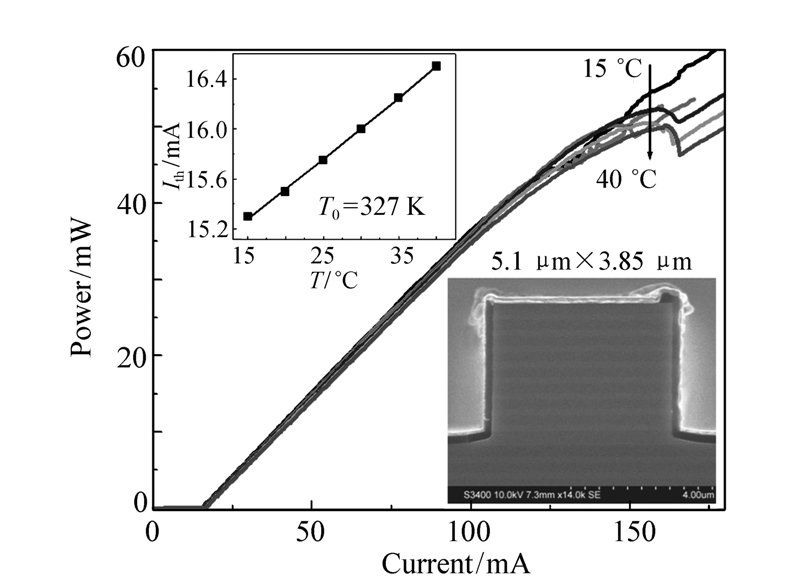
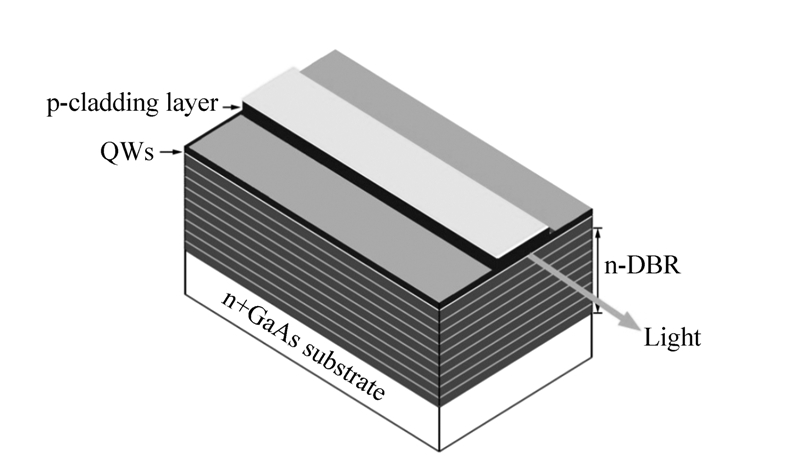
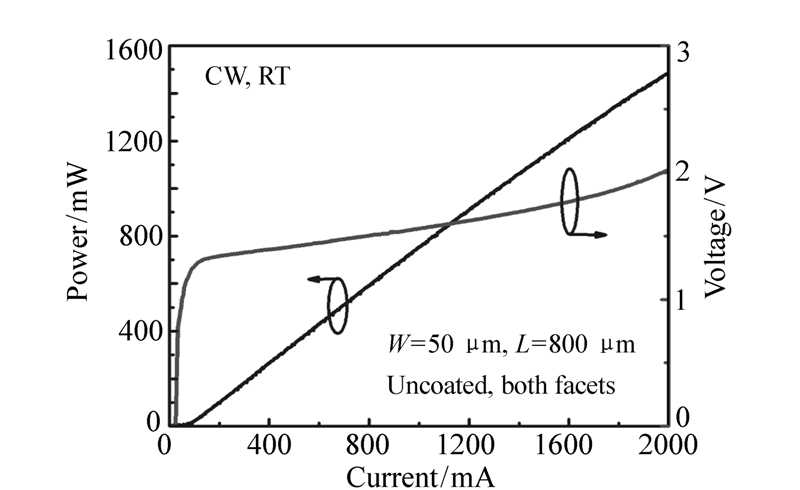
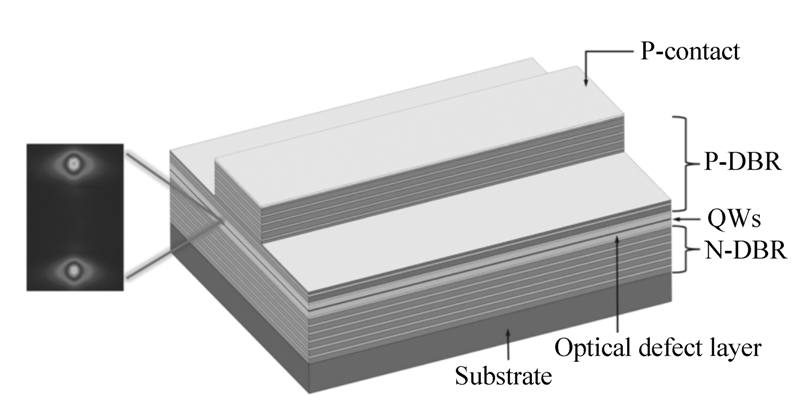
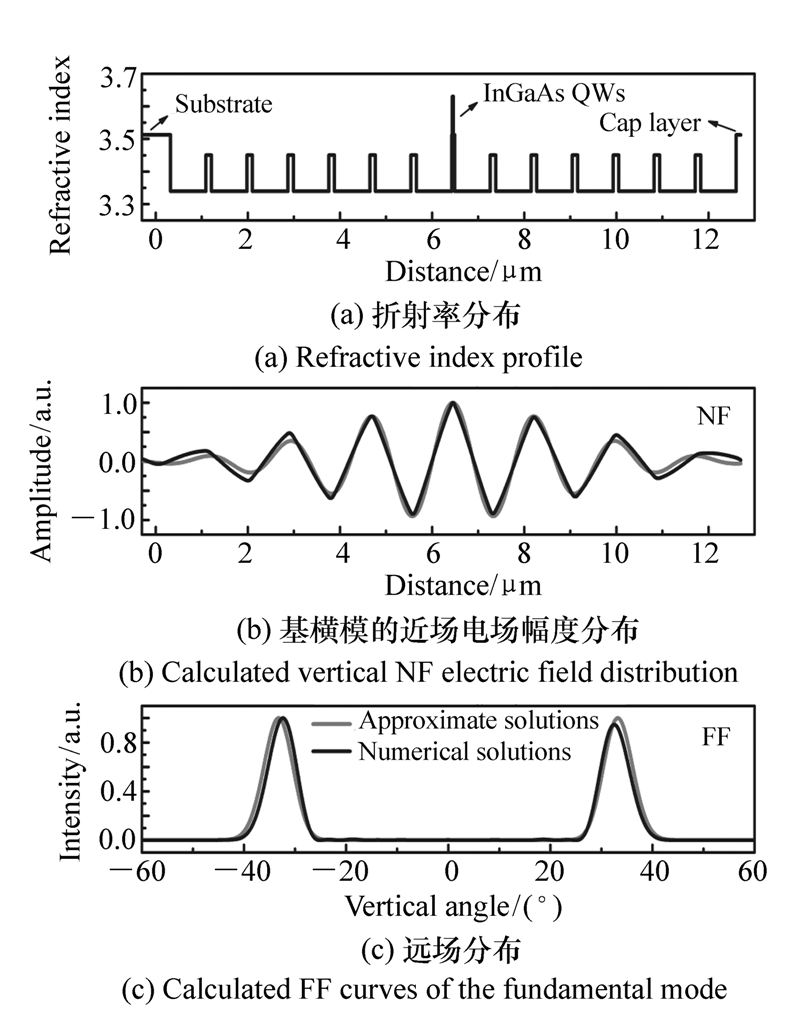
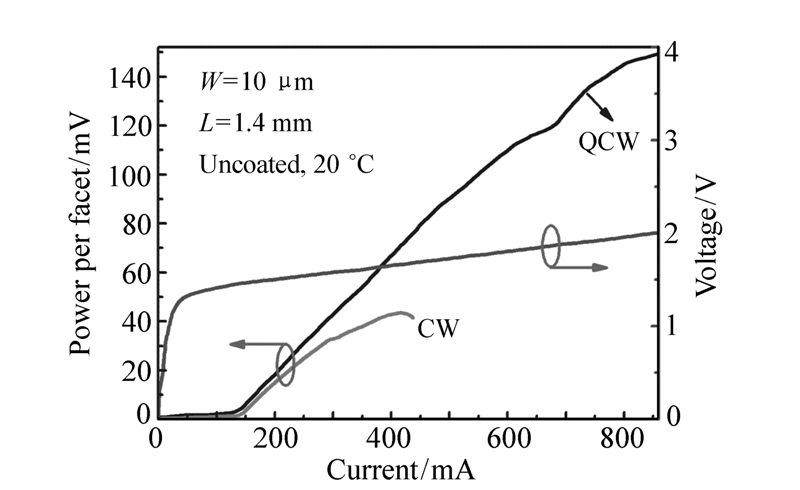
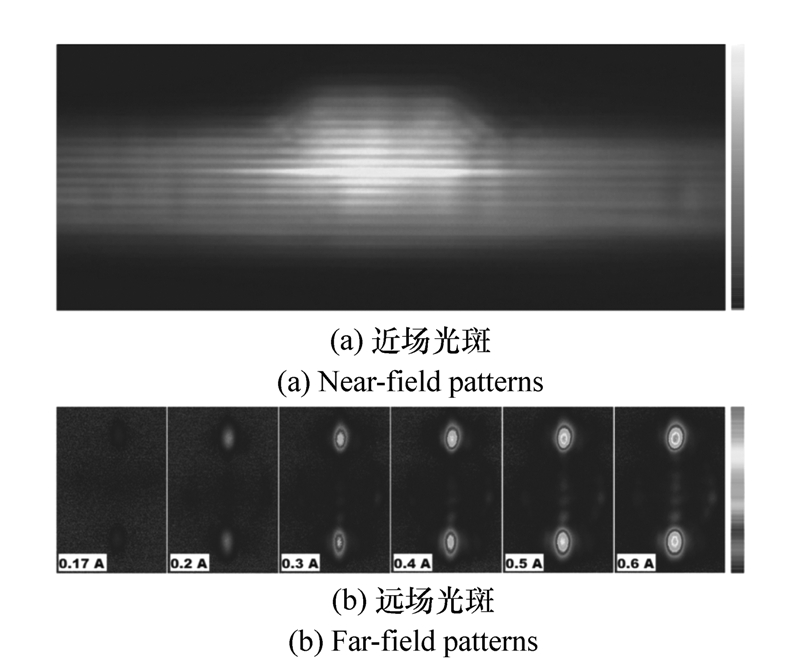
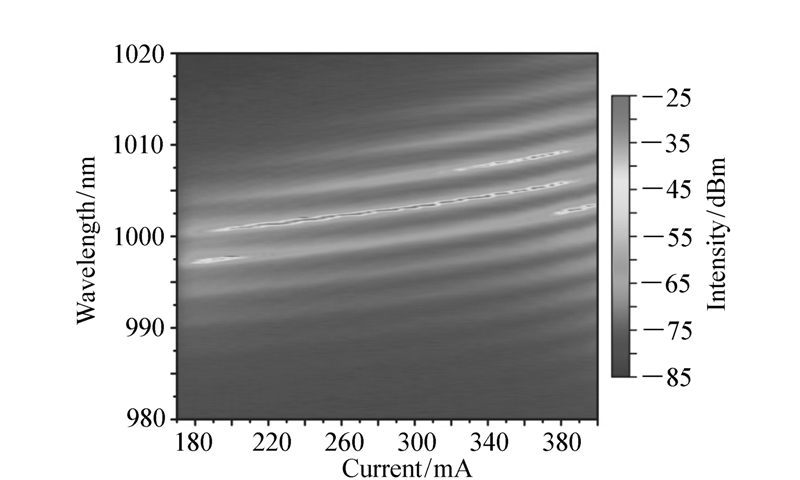
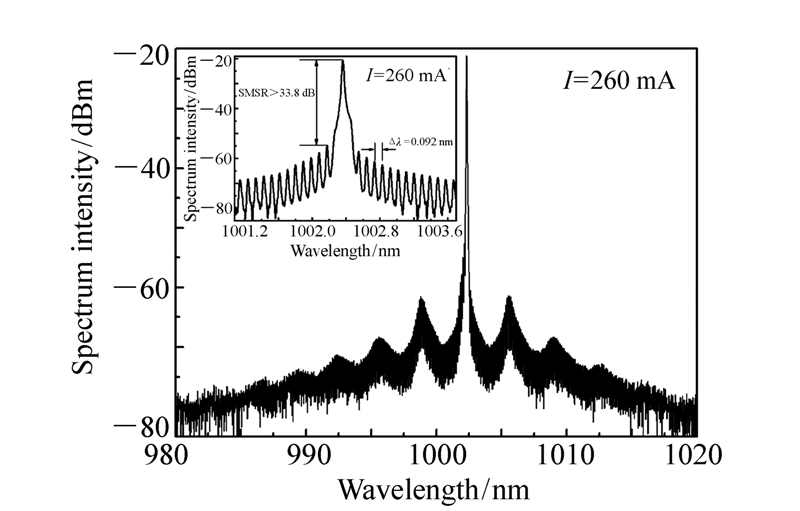
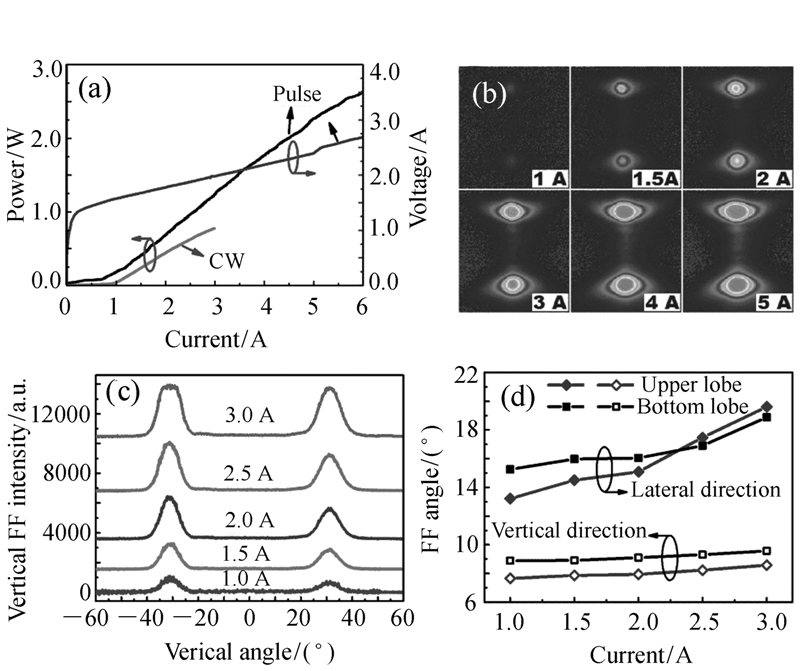
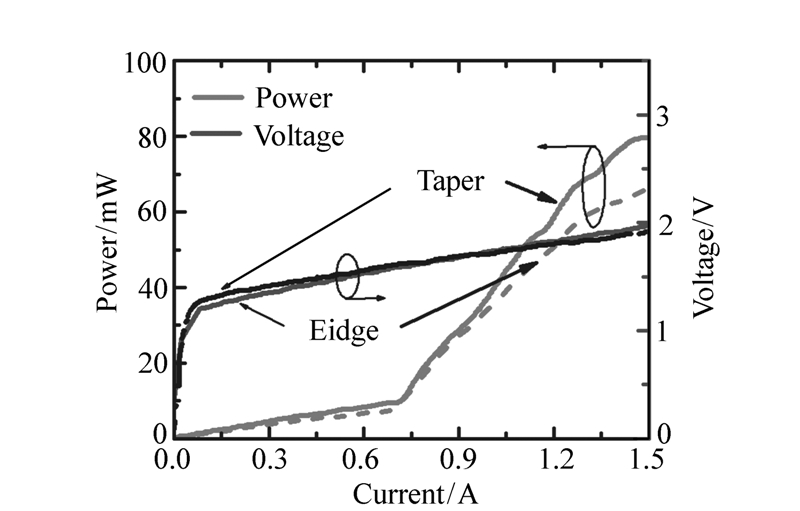
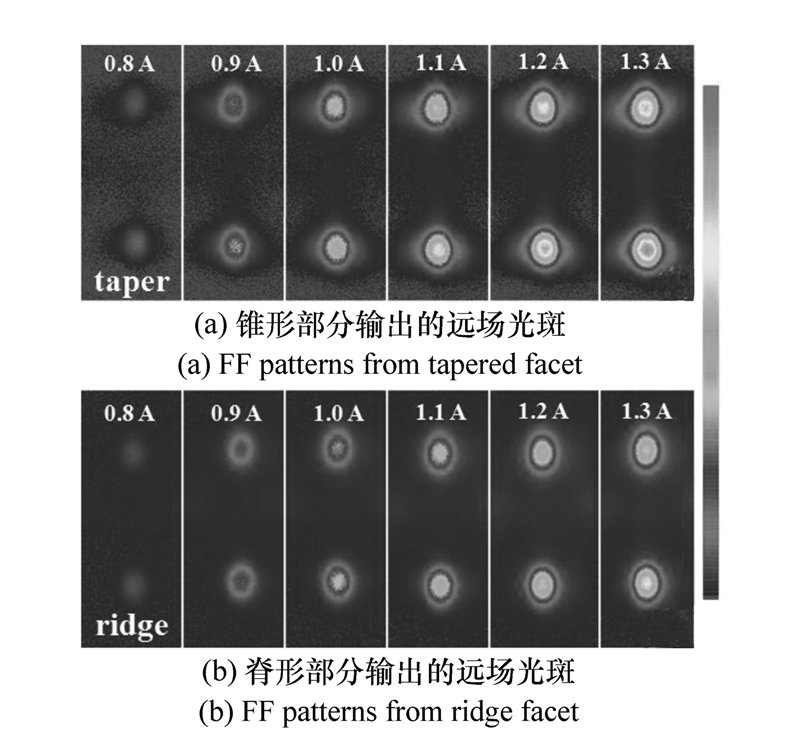
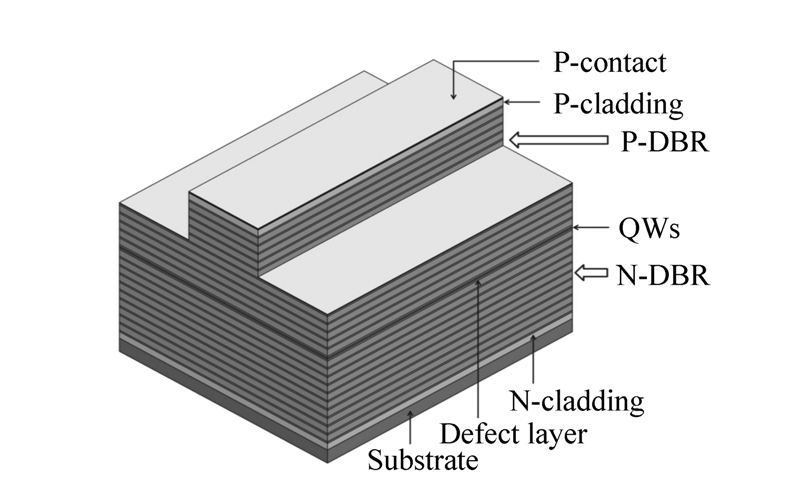
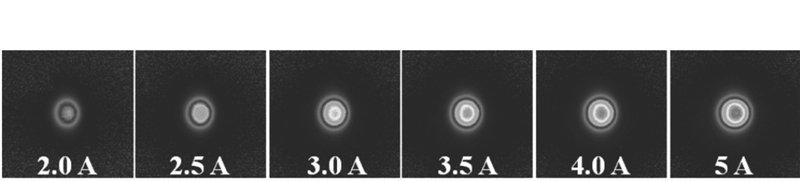
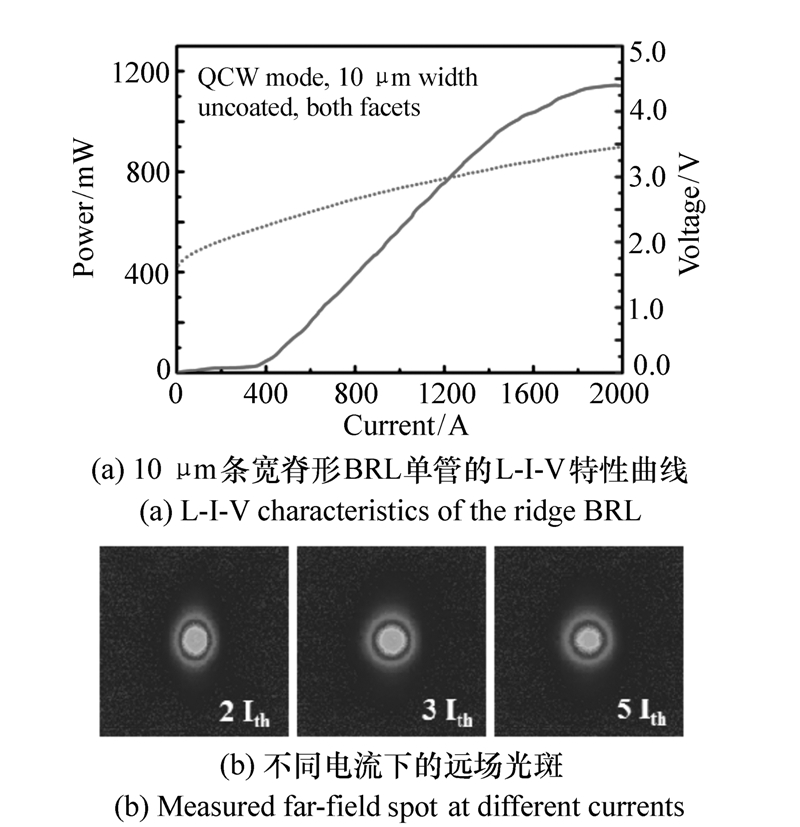
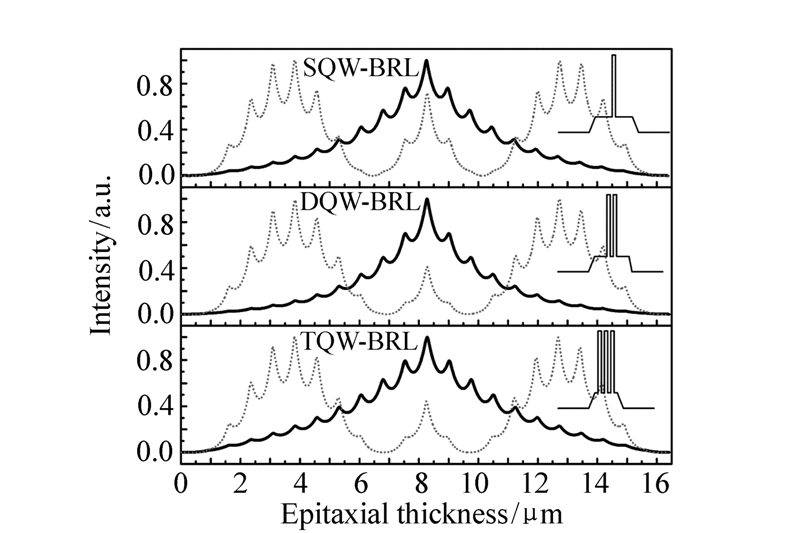
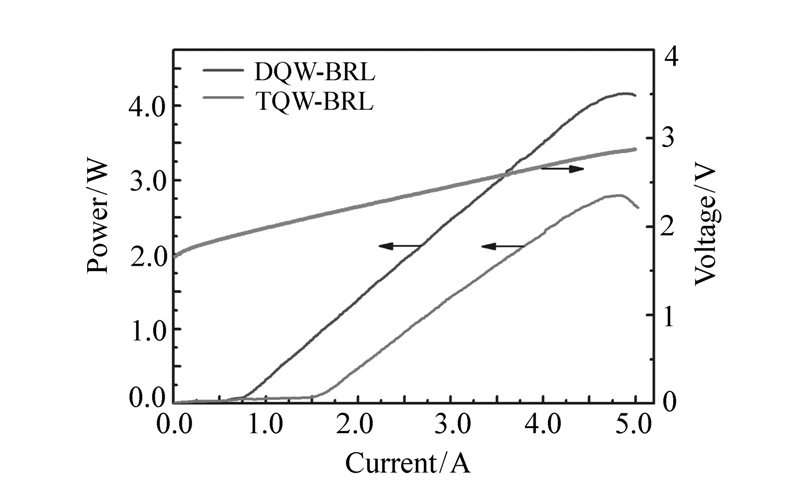
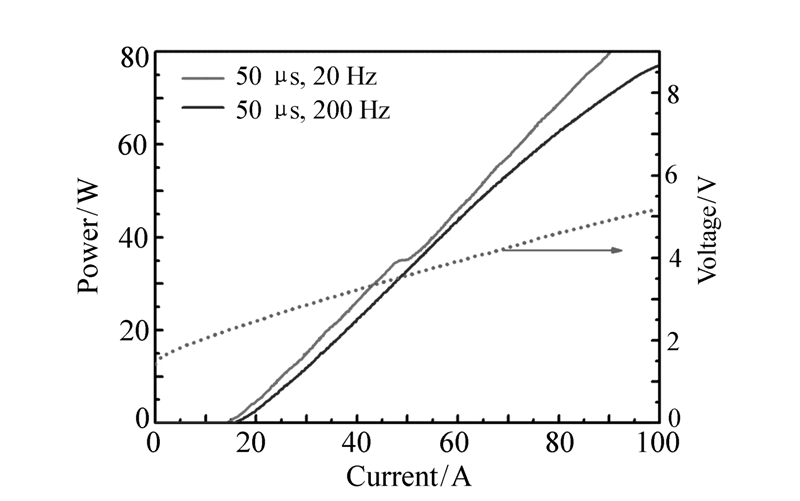
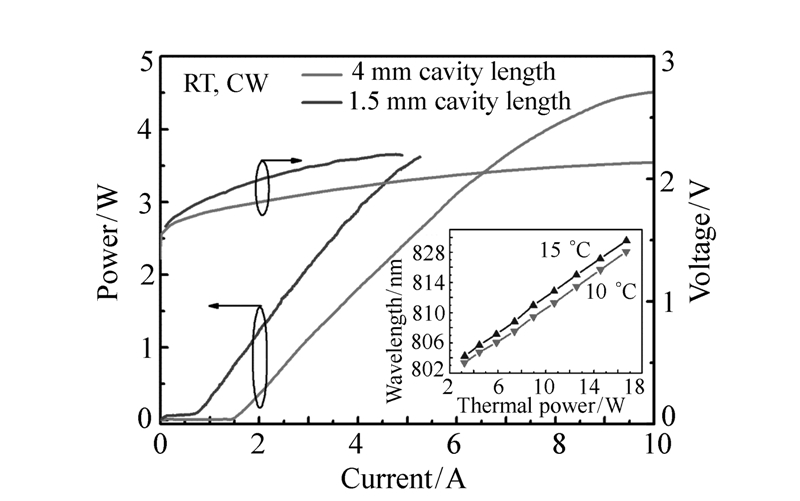
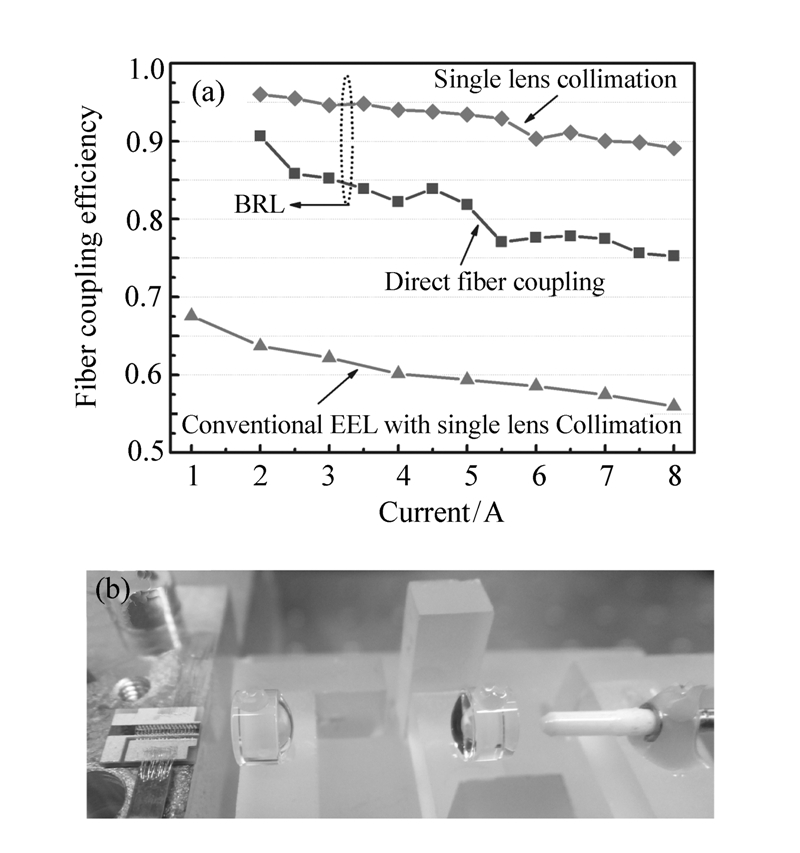
高功率半导体激光器在固体或光纤激光器泵浦、材料加工、医疗、传感、空间通讯和国防上有着极其重要的应用,但传统半导体激光器面临垂直发散角大、椭圆光斑的难题,限制了其直接应用。为了降低激光器的垂直发散角,本项目采用布拉格反射波导结构,利用光子带隙导引替代传统的全反射进行光场限制,优化设计了多种布拉格反射波导激光器结构,并制备了高性能的激光器器件。首先,采用传输矩阵理论和布洛赫波近似的方法计算了布拉格反射波导的模式色散关系,发现通过控制腔模光场分布,可实现不同远场的激光输出。接着,针对布拉格波导光子带隙导引机制,深入研究了四分之一波长布拉格反射波导激光器、单边布拉格反射波导激光器的光场特性,弄清了影响此类激光器远场的本质因素,最终设计并验证了一种布拉格反射波导双光束激光器,激光器在垂直方向可输出两个对称的、近圆形光束,单光束垂直和侧向发散角半高全宽分别低至7.2°和5.4°。另外,通过调控光缺陷层,使激光器工作在受抑隧穿光子带隙导引机制下,实现了超窄的单光束激光输出,激光器单管连续输出功率超过4.6 W,垂直发散角最低降至4.9°(半高全宽)和9.8°(95%功率)。这种高功率、窄的圆形光束输出可以大幅降低半导体激光器的应用成本,提高泵浦或光纤耦合效率,具有广阔的应用前景。
高功率半导体激光器在固体或光纤激光器泵浦、材料加工、医疗、传感、空间通讯和国防上有着极其重要的应用,但传统半导体激光器面临垂直发散角大、椭圆光斑的难题,限制了其直接应用。为了降低激光器的垂直发散角,本项目采用布拉格反射波导结构,利用光子带隙导引替代传统的全反射进行光场限制,优化设计了多种布拉格反射波导激光器结构,并制备了高性能的激光器器件。首先,采用传输矩阵理论和布洛赫波近似的方法计算了布拉格反射波导的模式色散关系,发现通过控制腔模光场分布,可实现不同远场的激光输出。接着,针对布拉格波导光子带隙导引机制,深入研究了四分之一波长布拉格反射波导激光器、单边布拉格反射波导激光器的光场特性,弄清了影响此类激光器远场的本质因素,最终设计并验证了一种布拉格反射波导双光束激光器,激光器在垂直方向可输出两个对称的、近圆形光束,单光束垂直和侧向发散角半高全宽分别低至7.2°和5.4°。另外,通过调控光缺陷层,使激光器工作在受抑隧穿光子带隙导引机制下,实现了超窄的单光束激光输出,激光器单管连续输出功率超过4.6 W,垂直发散角最低降至4.9°(半高全宽)和9.8°(95%功率)。这种高功率、窄的圆形光束输出可以大幅降低半导体激光器的应用成本,提高泵浦或光纤耦合效率,具有广阔的应用前景。