


Image motion measurement for airborne camera based on joint transform correlation
-
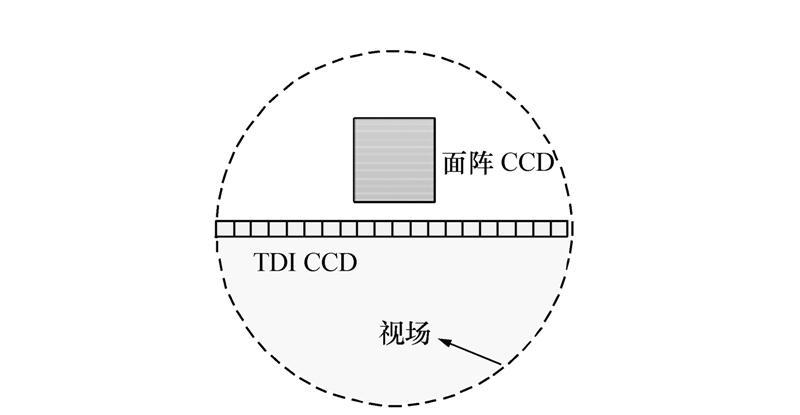
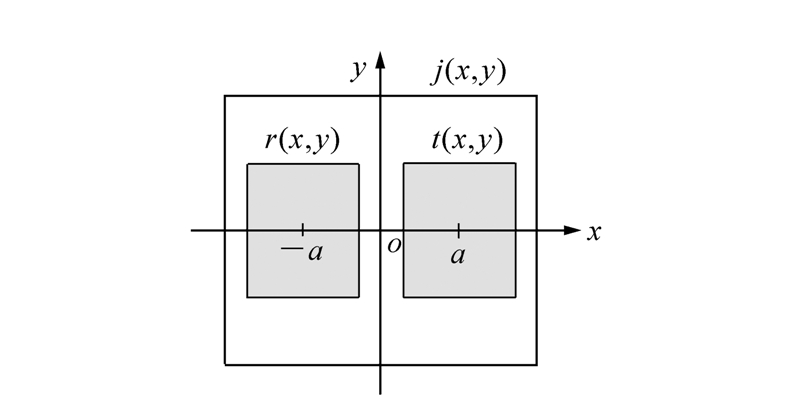
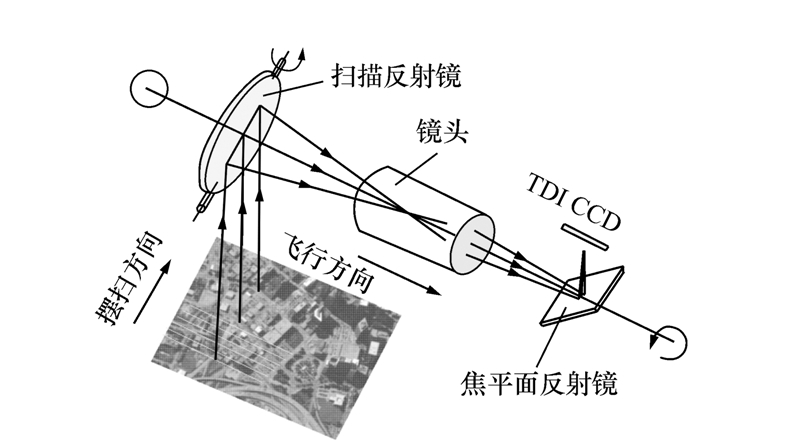
摘要: 为了提高像移测量精度,针对机载航空摆扫相机提出一种坐标变换法和图像相关法相结合的像移测量方法。利用坐标变换法得到初始像移速度,利用图像联合变换相关法对像移速度残差进行补偿。联合图像通过一个面阵CCD获得,该面阵CCD放置在相机焦平面上并与成像线阵TDI CCD平行,其输出的当前图像与参考图像合并构成联合图像进行二维空间联合变换相关运算,得到像移修正矢量。对该矢量分别在相机摆扫方向和载机飞行方向进行分解,从而得到摆扫像移和前向像移的修正量。仿真实验结果表明,在输入图像信噪比为4 dB时,像移测量误差在0.1 pixel以内。Abstract: To improve the precision of image motion measurement for airborne pendulum-swing cameras, a method of image motion measurement combining the coordinate transformation and image correlation is proposed. First, the initial image motion velocity is calculated by using the coordinate transformation method. Then, the image motion velocity residual errors are compensated by using image joint transformation correlation method. The joint images are produced by an area array CCD which is set paralleled to the imaging linear TDI CCD in the focal plane of the camera. The current and the reference frames output from the area array CCD are combined into a joint image. By taking 2D spatial correlation computation on the joint image, the image motion correction vector is obtained. Corrections of the forward and pendulum-swing image motions are determined by decomposing the vector. Simulation test results show that the image motion measurement error is less than 0.1 pixels for input images with SNR=4 dB.
-
Key words:
- airborne cameras /
- image motion compensation /
- area CCD /
- joint transform correlation
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] -

 下载:
下载:




图(7)
计量
- 文章访问数: 1473
- HTML全文浏览量: 476
- PDF下载量: 839
- 被引次数: 0
