


Design of 3D laser imaging receiver based on 8×8 APD detector array
-
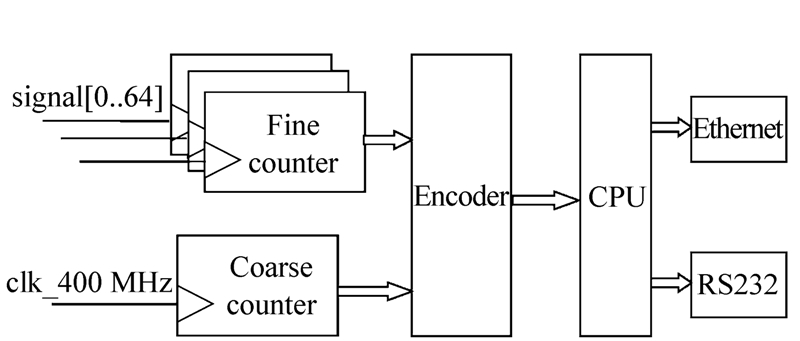
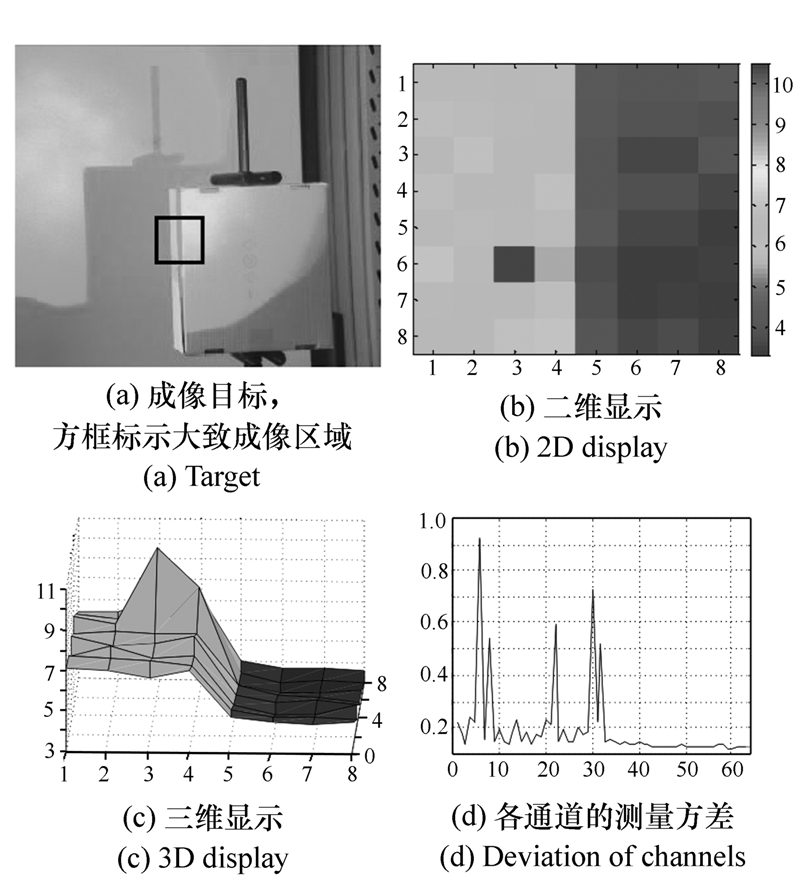
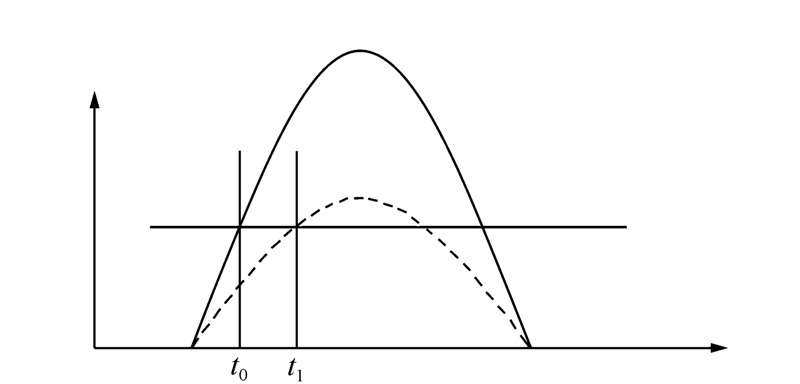
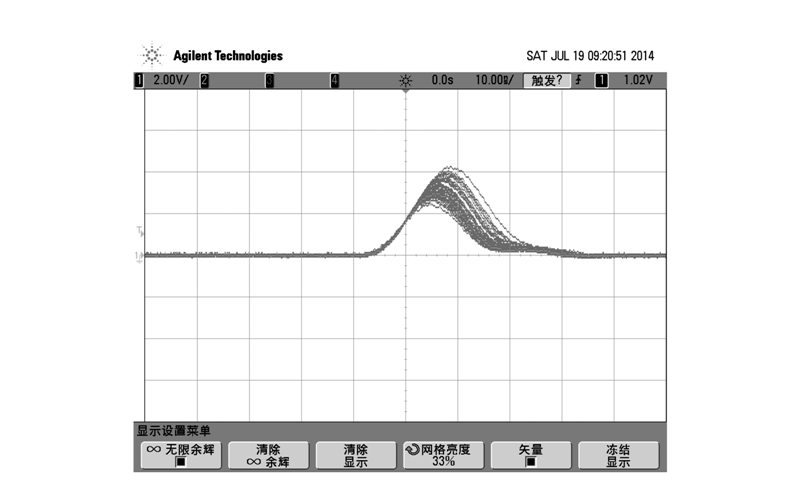
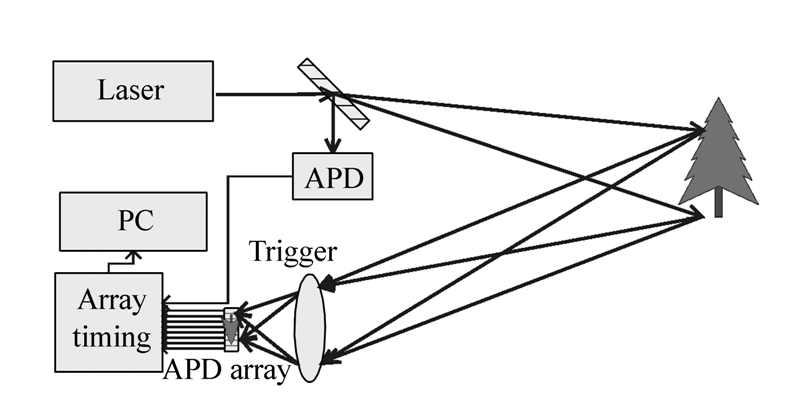
摘要: 为了实现对目标的无扫描阵列激光三维成像并研究系统参数对三维成像距离分辨率的影响,研制了8×8 pixel激光三维成像接收机。接收机采用线性模式APD阵列,设计了模拟信号放大、阈值处理将回波光信号转换为数字信号后,利用FPGA设计实现64通道高精度阵列计时系统,实现了对目标的无扫描实时三维成像功能。首先对设计完成的三维成像接收机组成及成像原理进行了介绍,对三维成像接收机中APD探测器阵列信号的模拟处理和数字处理流程和实现方式进行了说明。随后分别对三维成像的核心FPGA计时系统及探测器整体进行了电子学测试和实验测试。测试结果表明,FPGA计时子系统的时间分辨率优于140 ps,三维成像系统整体距离分辨率在0.2 m左右。最后对分辨率的误差进行了分析,结果表明,激光回波强度波动是影响此接收机距离分辨率的最主要因素。Abstract: In order to realize scannerless three dimensional(3D) laser imaging and analyze system parameters impact on ranging precision, a 3D imaging receiver with 8×8 elements is implemented. The receiver utilizes linear mode APD array. Analog signal amplification and threshold processing is applied to convert the optical signal to digital pulse. Then a 64 channel time to digital convertor array is implemented in FPGA, and 3D laser imaging receiver is invented which can acquire 3D information of target in real-time. First the principle of 3D imaging and construction of the receiver is introduced, including procedure and implementation of the array signal processing. Then electrical test and 3D imaging experiment are carried out for FPGA timing unit and receiver respectively, which indicate a timing resolution of 140 ps and range resolution of 0.2 m. At last, range resolution error is analyzed and we come to the conclusion that laser pulse energy fluctuation is the main error source.
-
Key words:
- 3D imaging detector /
- APD detector array /
- high resolution ranging /
- tapped delay line
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] -

 下载:
下载:




图(8) / 表(1)
计量
- 文章访问数: 2107
- HTML全文浏览量: 606
- PDF下载量: 889
- 被引次数: 0
