


High-precision real-time angle reference in dynamic measurement of photoelectric encoder
-
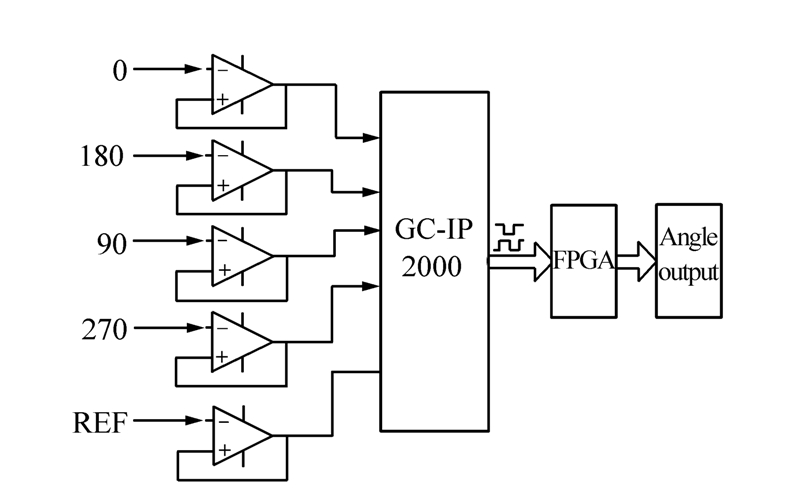
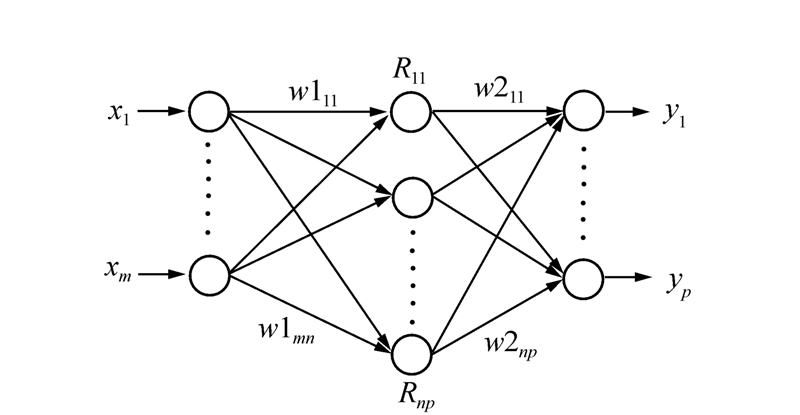
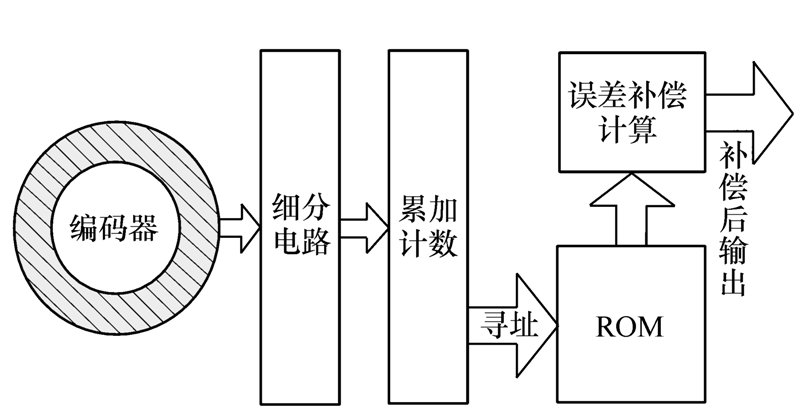
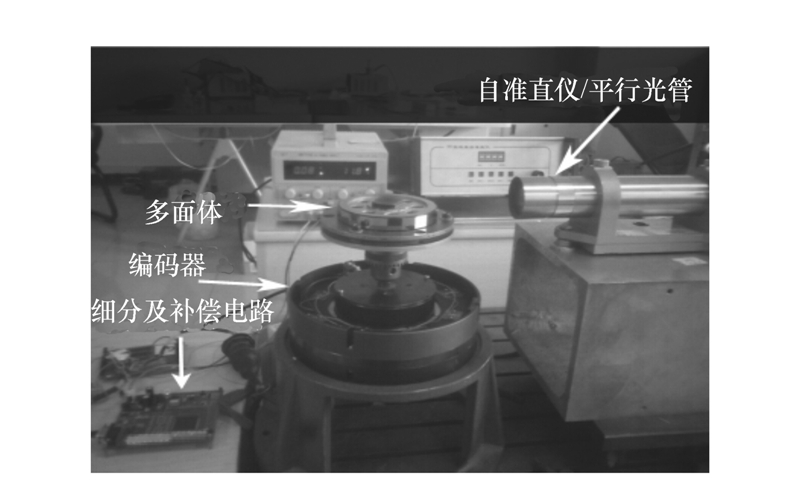
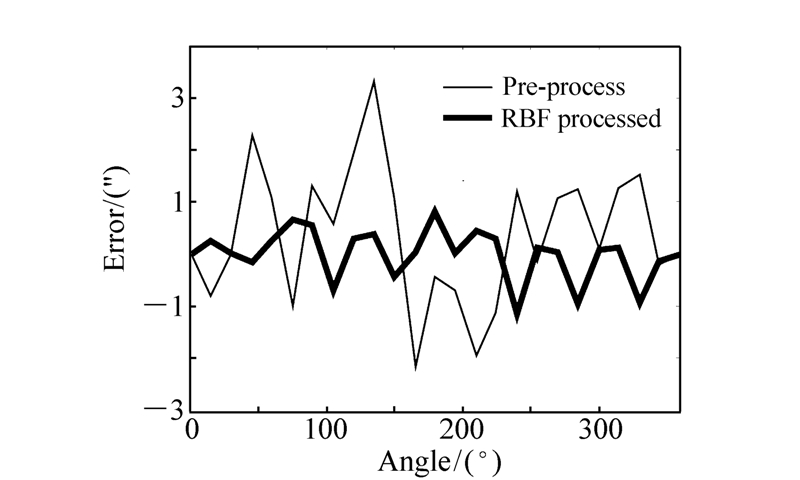
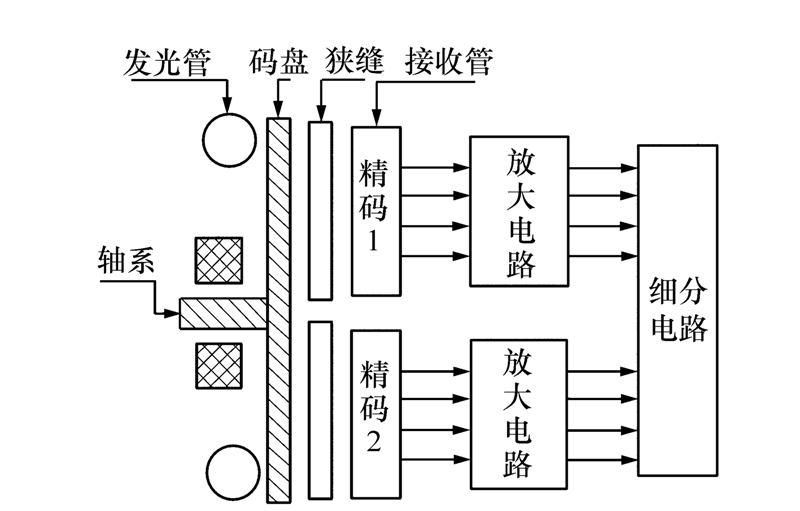
摘要: 在编码器动态特性检测中,角度基准的快速反应和精度直接影响着动态特性检测装置的准确性。为实现角度基准的快速响应,提高基准编码器的测角精度,本文设计了高精度快速细分角度基准编码器。首先,通过对目前角度基准不足对编码器动态特性检测影响的分析,得出动态检测精度主要受基准编码器的数据处理延时影响。其次,通过对基准编码器结构、细分电路、处理电路等的设计,完成了23位高实时性角度基准编码器的制作。最后,为提高检测精度,利用RBF神经网络对角度基准进行误差补偿。所设计的角度基准编码器分辨率达到0.15",并且可以在10 r/s速度时,保证逐分辨率输出。经过测量,补偿前基准编码器的精度为1.30",补偿后的基准编码器误差峰峰值不超过2.5",精度优于0.6"。高精度、高实时性角度基准编码器的研制,提高了编码器动态特性检测系统的检测精度,为研究编码器动态特性提供了基础。Abstract: In the detection of photoelectric encoder's dynamic characteristics, the quick response and the precision of reference encoder affect detection accuracy. A high precision and fast subdivision angle reference encoder is designed to achieve fast reaction and high precision. Firstly, the influence of insufficient angle reference on the detection of encoder's dynamic characteristics is analyzed and time-delay is the main factor that influences the precision of angle reference encoder. Secondly, 23 bit angle reference encoder has been manufactured by structure and circuit devising. Lastly, the encoder error has been compensated by using RBF neural network with the detection of angle reference encoder. The encoder resolution is 15", and it can guarantee the output speed in accordance with the required resolution at speed of 10 r/s. The precision proves to be less than 0.6" while it was 1.30" before error compensation. The error of peak to peak value is 2.5". As the trails show, the developed reference encoder with the properties of high resolution, high precision and high real-time improves the detection precision of photoelectric encoder's dynamic characteristics.
-
Key words:
- dynamic detection /
- angle reference /
- fast subdivision /
- high precision /
- error compensation
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] -

 下载:
下载:





图(10) / 表(3)
计量
- 文章访问数: 1814
- HTML全文浏览量: 616
- PDF下载量: 840
- 被引次数: 0
