


Laser guided lens based on four-quadrant detector
-
摘要: 为了满足激光制导对大视场、高线性度探测的性能要求,基于激光制导炸弹的应用需求,介绍了四象限探测器的工作原理和特点,分析了光斑大小、能量均匀性、线性度、探测距离等参数对探测精度的影响;结合系统性能指标,选择了合理的光学系统结构类型,完成了光学系统设计和光机结构设计;利用畸变、点列图、足迹图、能量集中度等指标对系统性能进行了评价,并分析了目标大小和探测距离对光斑大小的影响。测试结果表明,激光导引镜头总视场为±20°、线性视场为±10°、目标大小为1.5~2.4 m、探测距离为50 m~4 km、测角精度优于0.2°,能够满足激光导引的需求。Abstract: In order to meet the leaser guiding requirements, such as large FOV, high linearity detecting and so on, the working principle and characteristics of four-quadrant detector are introduced based on the application requirements of laser-guided bombs. Spot size, energy uniformity, linearity, detection range and other parameters which influence detection accuracy are analyzed. Based on the system requirements, a reasonable structure type of optical system is selected, and optical system design and machine design are completed. Distortion, spot diagram, footprint and geometric encircled energy are used to evaluate the system performance, and the effects of target size and detection distance on spot size of the guidance system are presented. Test results show that the total FOV is ±20°; the linear FOV is ±10°; the detectable target size is 1.5~2.4 m; the detectable detection range is 50 m~4 km and angle detecting accuracy is better than 0.2°, which meet the needs of laser guidance.
-
Key words:
- laser seeker /
- four-quadrant detector /
- optical design /
- opti-mechanical design /
- simulation analysis
-

图 3 光学系统畸变曲线(目标大小为1.5 m,探测距离为4 000 m)
Figure 3. Distortion of optical system(Diameter of target:1.5 m,detection distance:4 000 m)

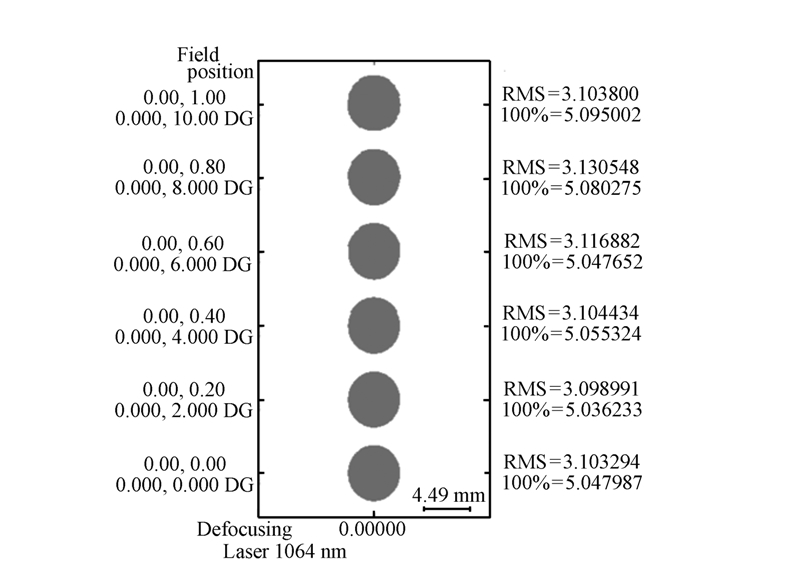
图 4 不同视场的点列图分布(目标大小为1.5 m,探测距离为4 000 m)
Figure 4. Spot of optical system(Diameter of target:1.5 m,detection distance:4 000 m)

图 5 光线足迹图(目标大小为1.5 m,探测距离为4 000 m)
Figure 5. Spot of footprint(Diameter of target:1.5 m,detection distance:4 000 m)

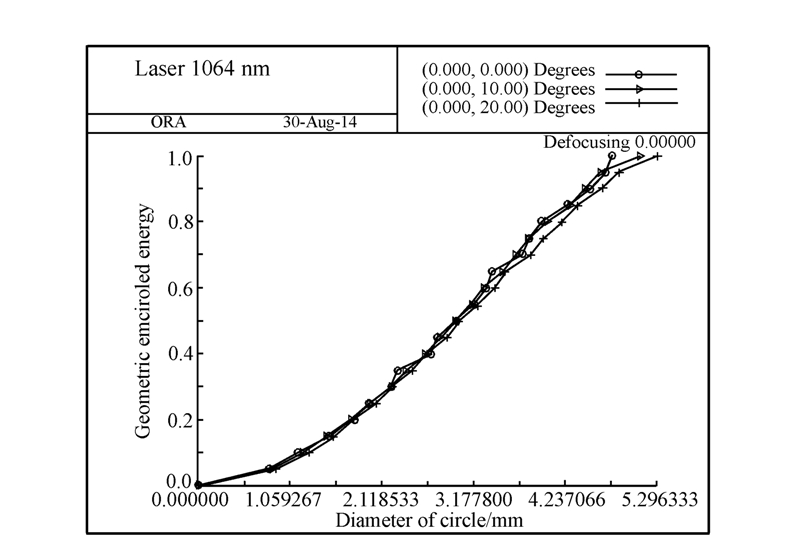
图 6 不同视场光斑能量集中度曲线(目标大小为1.5 m,探测距离为4 000 m)
Figure 6. Geometric encircled energy for different fields(Diameter of target:1.5 m,detection distance:4 000 m)
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] -

 下载:
下载:




计量
- 文章访问数: 3480
- HTML全文浏览量: 1086
- PDF下载量: 958
- 被引次数: 0
