


Development of shape estimation of space target based on lightcurve inversion
-
摘要: 光度曲线反演空间目标形状和姿态等参数为空间目标监视与识别提供了新的技术途径。首先分析了基于光度曲线反演空间目标信息的必要性,之后通过关注和跟踪国内外最新发展情况,全面总结了目前进行形状反演的3种主流方法的研究现状及优缺点,对3种反演方法进行了比较分析,指出基于非线性滤波技术的形状反演方法是未来的主要发展方向,并分析了3种非线性滤波技术的优缺点。最后针对反演存在的问题,指出了基于改进的实时性更好的粒子滤波算法,融合多种传感器信息反演几何形状和表面材料更为复杂的空间目标是下一步研究发展的主要方向。Abstract: Shape and attitude estimation based on lightcurve inversion provide a new technological approach for space target surveillance systems. Firstly, the necessity of space target information inversion based on lightcurve is discussed. Secondly, the performance of the main three methods of shape estimation are comprehensively summarized, and the method of shape estimation based on nonlinear filter technology is the main development direction in the future. Then, the advantages and disadvantages of nonlinear filter technology are analyzed. Finally, aiming at the problem of inversion, we point out the next research and development direction of fusing multiple sensor information based on the particle filter algorithm with better real-time performance to inverse more complex geometrical shape and surface materials of space target.
-
Key words:
- photometric data processing /
- space target /
- lightcurve /
- ground-based detection /
- shape model
-

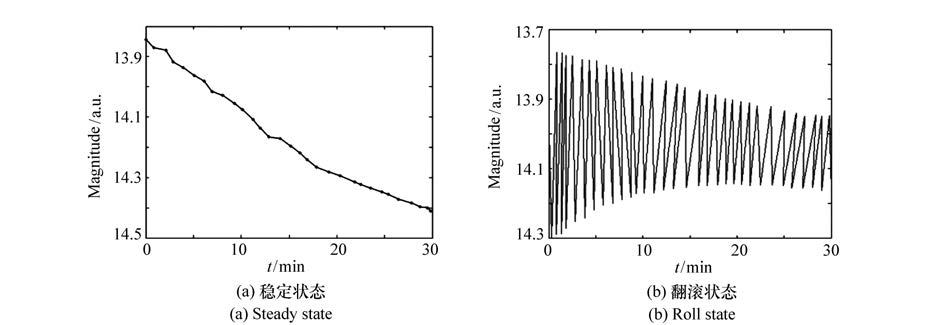
图 1 不同状态目标基于时间序列光度曲线
Figure 1. Different states target lightcurve based on time sequence

图 2 不同类别的空间目标太阳帆板指向分布图
Figure 2. Distribution diagram of solar panel offsets on different space target

图 3 不同形状空间目标光度值的下限曲线
Figure 3. Lower limit of lightcurve in different space target shapes

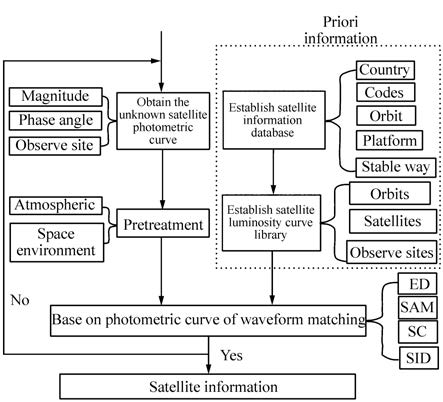
图 4 基于光度曲线特点的空间目标信息反演方法
Figure 4. Principle diagram of satellite information inversion based on the photometric curve

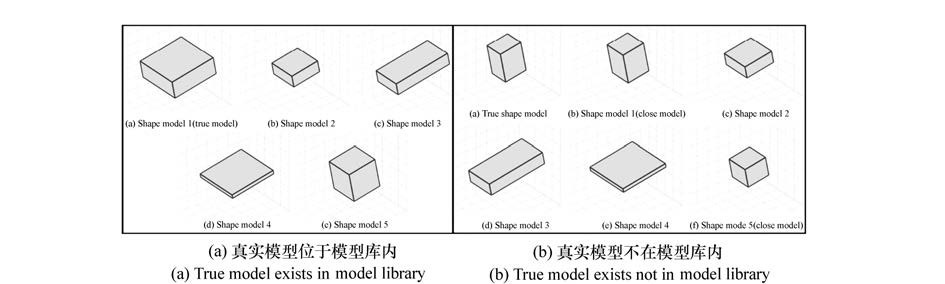
图 5 基于高斯面密度法的空间目标反演结果
Figure 5. Space target inversion results based on the Gaussian surface density

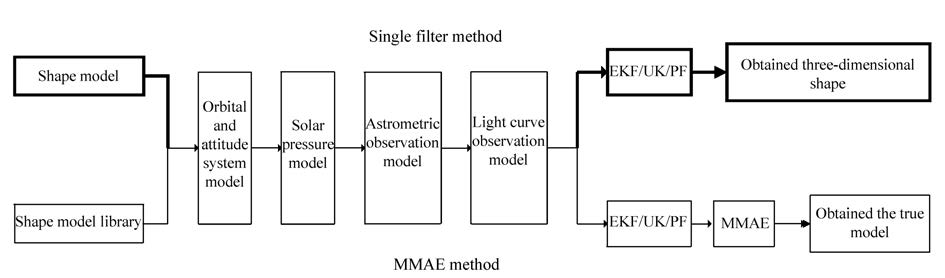
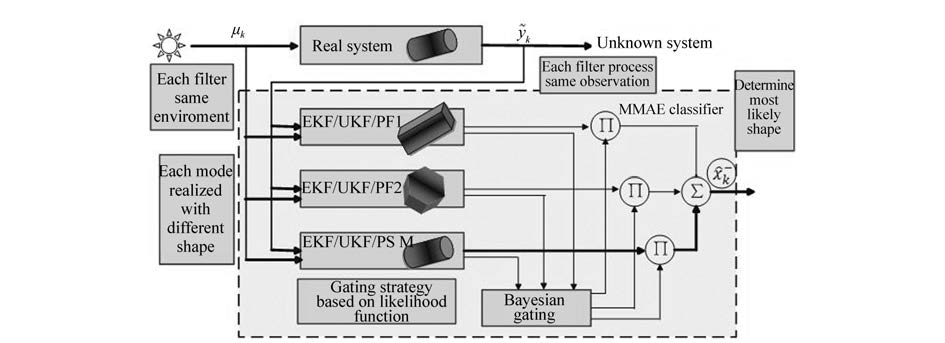
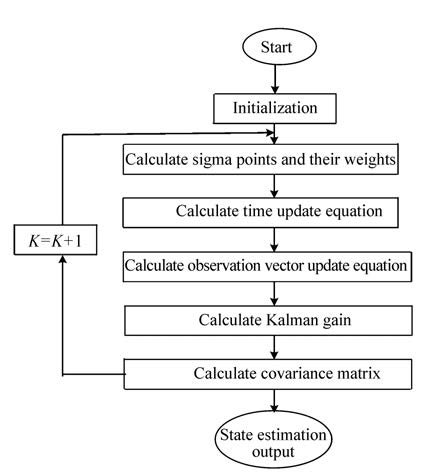
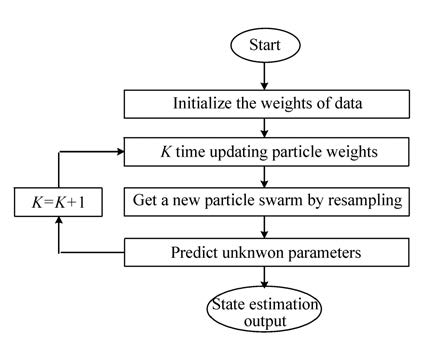
图 6 基于非线性滤波技术的形状反演方法流程图
Figure 6. Flow chart of the shape inversion method based on nonlinear filter technology
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] -

 下载:
下载:





计量
- 文章访问数: 1839
- HTML全文浏览量: 503
- PDF下载量: 901
- 被引次数: 0
