2015年 8卷 第5期
2015, 8(5): 679-698.
doi: 10.3788/CO.20150805.0699
 摘要
摘要 HTML全文
HTML全文 PDF 2030KB
PDF 2030KB
摘要:
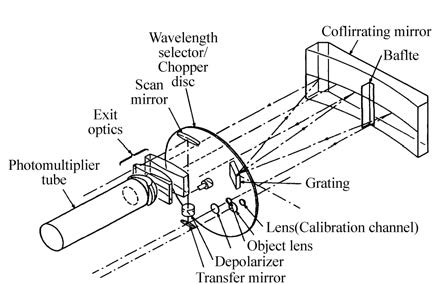
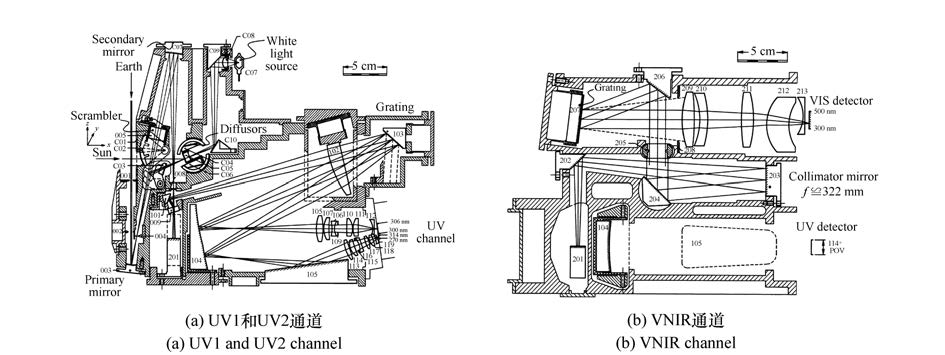
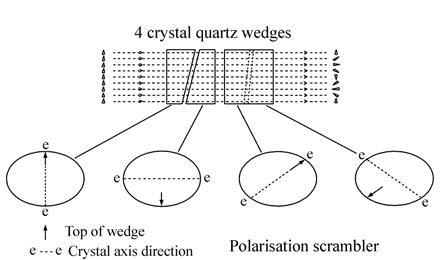
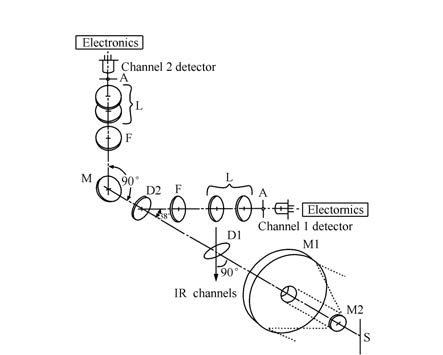
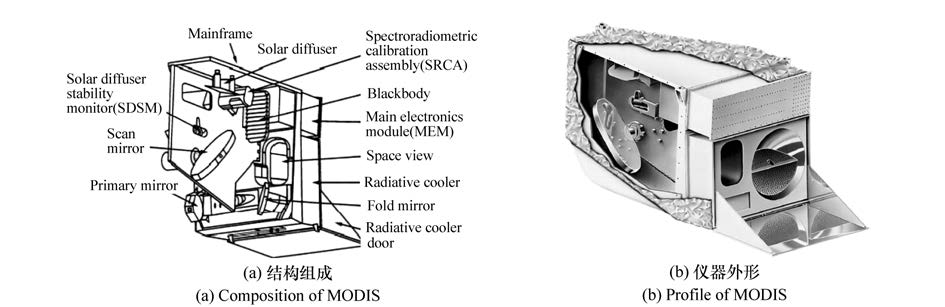
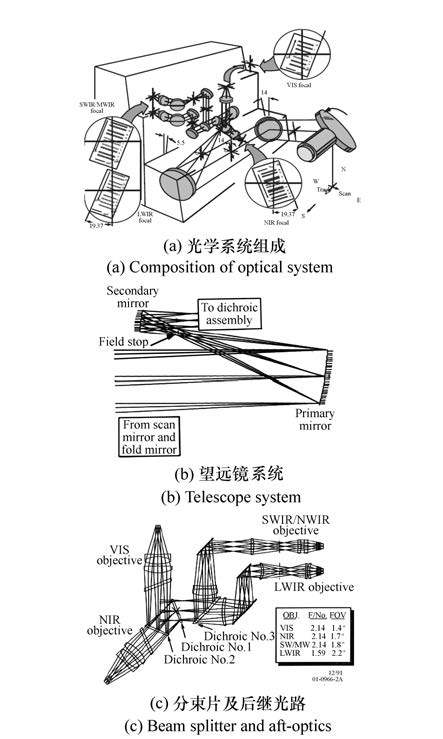
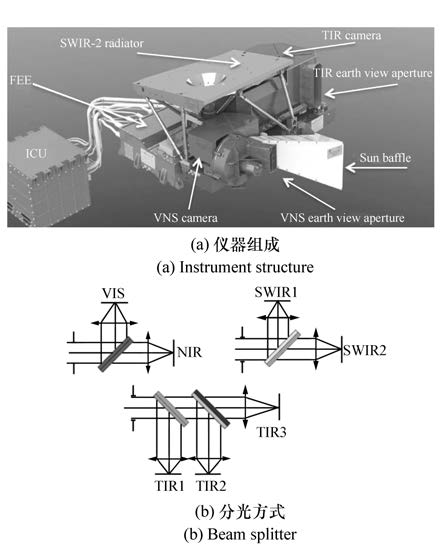
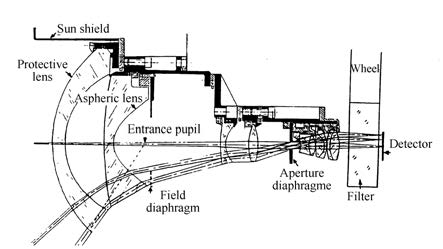
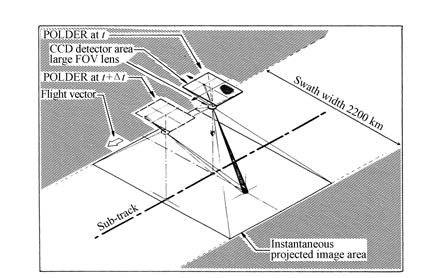
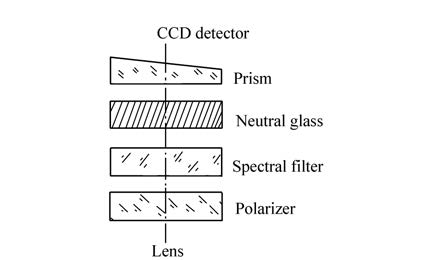
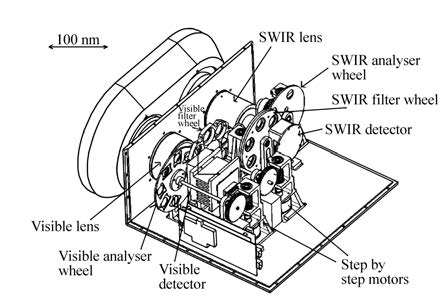
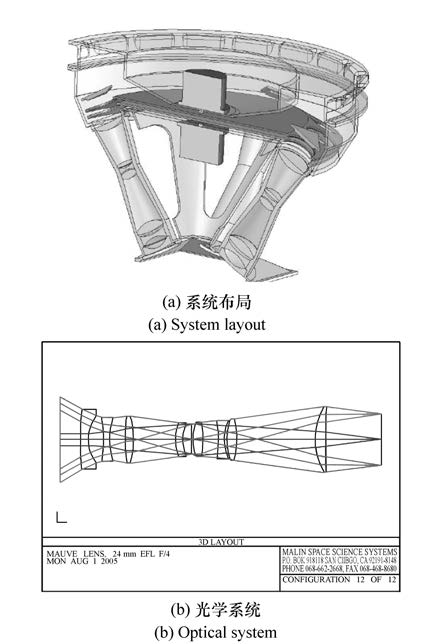
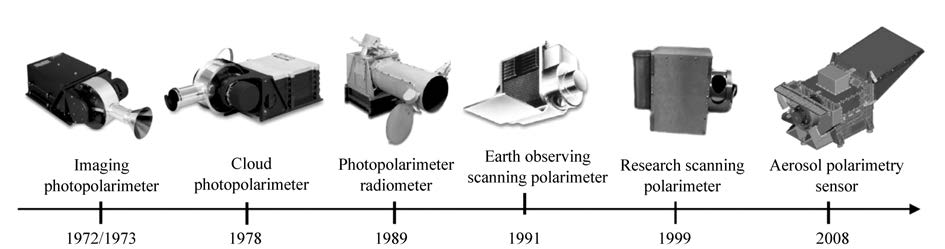
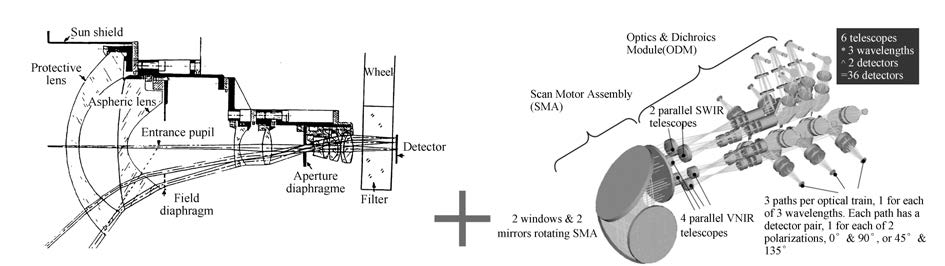
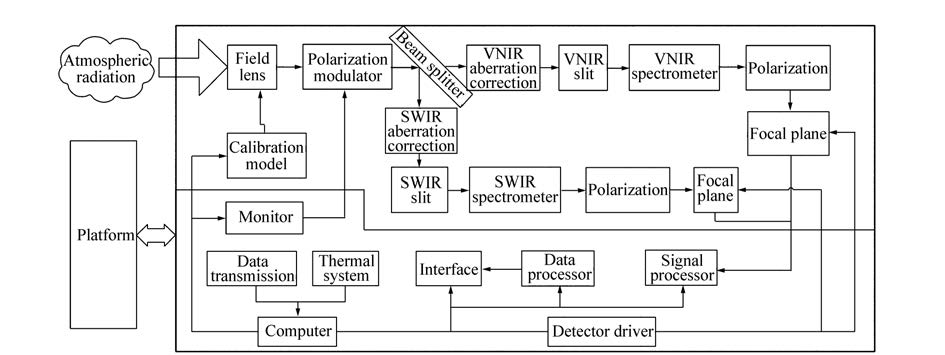
气溶胶是影响地球气候和环境的不确定因素之一,星载被动光学遥感具有大视场、宽波段、高时空分辨率等优势,已成为云与气溶胶探测的有效手段之一。本文简述了云与气溶胶光学遥感探测的必要性和可行性,详细介绍了国内外典型云与气溶胶光学遥感仪器的系统组成、主要技术参数和方案特点,并基于现有仪器的不足和气溶胶反演需求,指出了云与气溶胶光学遥感仪器的发展趋势,给出了新一代云与气溶胶光学遥感仪器的方案设计结果。集成大视场、中等分辨率、多角度、多光谱、宽谱段、长寿命的高精度偏振测量是新一代星载云与气溶胶光学遥感探测仪的首选方案和发展趋势。
气溶胶是影响地球气候和环境的不确定因素之一,星载被动光学遥感具有大视场、宽波段、高时空分辨率等优势,已成为云与气溶胶探测的有效手段之一。本文简述了云与气溶胶光学遥感探测的必要性和可行性,详细介绍了国内外典型云与气溶胶光学遥感仪器的系统组成、主要技术参数和方案特点,并基于现有仪器的不足和气溶胶反演需求,指出了云与气溶胶光学遥感仪器的发展趋势,给出了新一代云与气溶胶光学遥感仪器的方案设计结果。集成大视场、中等分辨率、多角度、多光谱、宽谱段、长寿命的高精度偏振测量是新一代星载云与气溶胶光学遥感探测仪的首选方案和发展趋势。







2015, 8(5): 699-713.
doi: 10.3788/CO.20150805.0679
摘要:
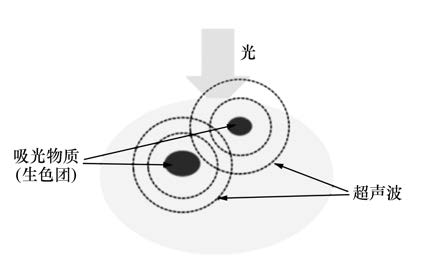
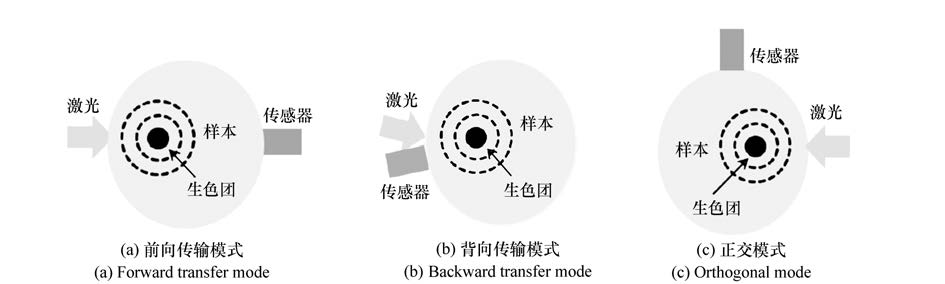
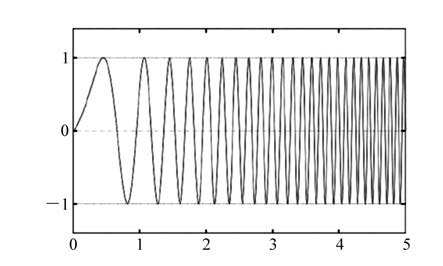
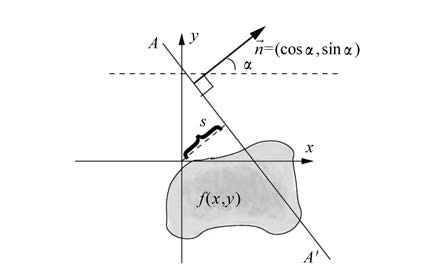
本文阐述了光声成像的工作原理,光声信号的产生,传播和探测过程,并总结了光声成像的研究进展,包括时域光声成像和频率域光声成像的研究进展、以及各自的特点,为光声成像领域的研究起到一定的借鉴作用。分析认为光声成像技术有着其他医学成像技术没有的诸多优点,如高分辨率、高对比度、成像深度深等具有广阔的应用前景和较高应用价值,是未来生物医学领域最重要的实时医学成像技术之一,因此得到了国际上的广泛关注。
本文阐述了光声成像的工作原理,光声信号的产生,传播和探测过程,并总结了光声成像的研究进展,包括时域光声成像和频率域光声成像的研究进展、以及各自的特点,为光声成像领域的研究起到一定的借鉴作用。分析认为光声成像技术有着其他医学成像技术没有的诸多优点,如高分辨率、高对比度、成像深度深等具有广阔的应用前景和较高应用价值,是未来生物医学领域最重要的实时医学成像技术之一,因此得到了国际上的广泛关注。





2015, 8(5): 714-724.
doi: 10.3788/CO.20150805.0714
摘要:
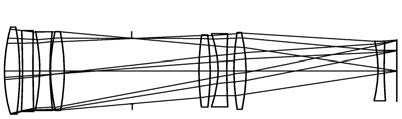
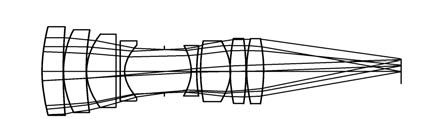
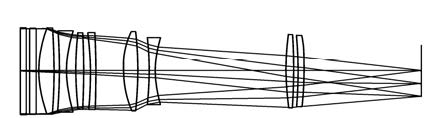
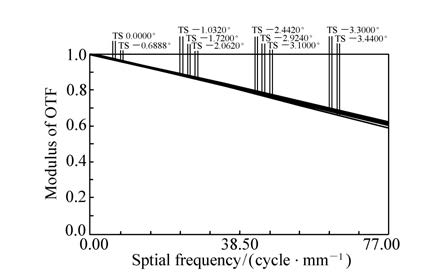
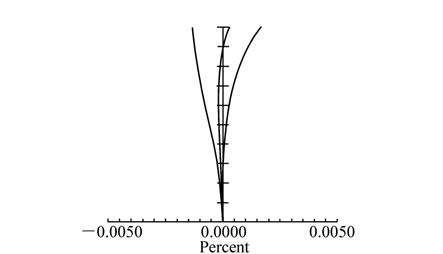
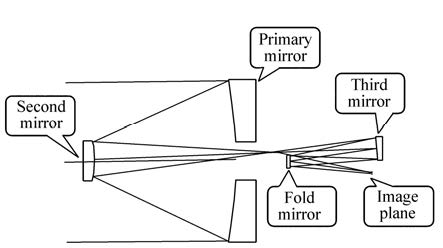
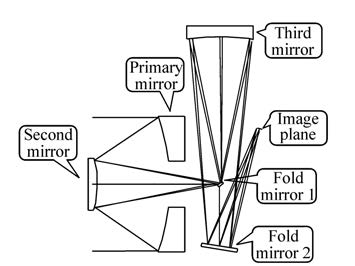
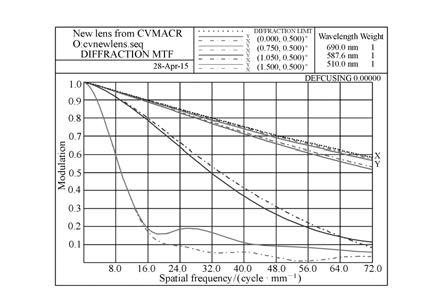
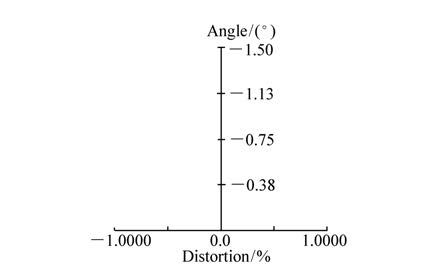
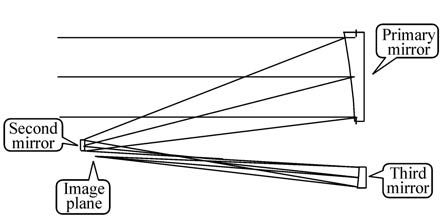
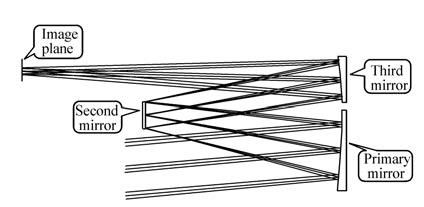
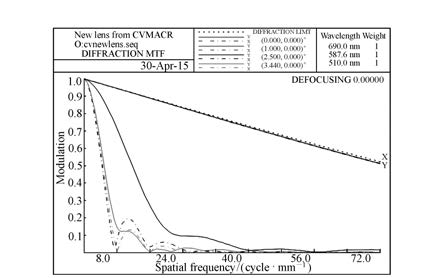
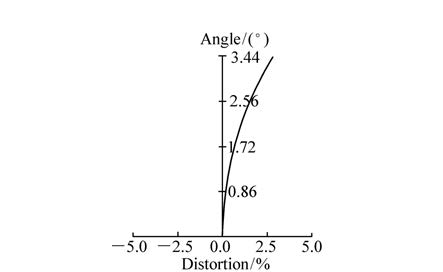
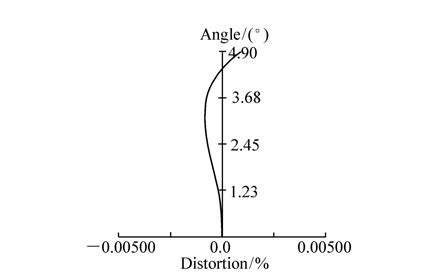
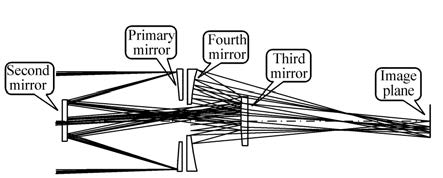
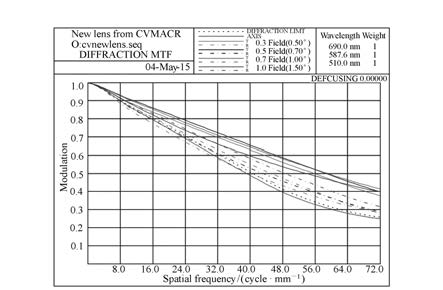
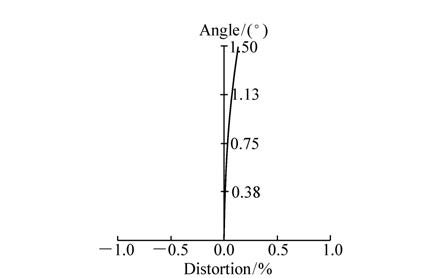
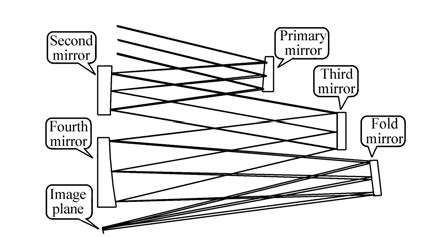
将遥感技术应用到测绘当中是现代地质测绘技术的发展趋势,随着光学载荷分辨率的不断提高,遥感测绘已经成为社会发展和国民经济发展的重要保障。光学载荷决定了测绘空间遥感器的分辨率、测绘精度、卫星平台体积与重量,是遥感器的核心部分。本文对高成像质量透射光学系统、同轴三反光学系统、离轴三反系统等常用的空间遥感测绘光学系统的结构形式和光学性能分别进行了介绍,并对处于研发阶段的新型空间反射光学系统的结构形式和光学性能进行了展望。分析认为,根据不同的应用环境和技术指标,合理选用不同种类的遥感测绘光学系统,可以最大程度利用平台资源,满足遥感测绘需求。
将遥感技术应用到测绘当中是现代地质测绘技术的发展趋势,随着光学载荷分辨率的不断提高,遥感测绘已经成为社会发展和国民经济发展的重要保障。光学载荷决定了测绘空间遥感器的分辨率、测绘精度、卫星平台体积与重量,是遥感器的核心部分。本文对高成像质量透射光学系统、同轴三反光学系统、离轴三反系统等常用的空间遥感测绘光学系统的结构形式和光学性能分别进行了介绍,并对处于研发阶段的新型空间反射光学系统的结构形式和光学性能进行了展望。分析认为,根据不同的应用环境和技术指标,合理选用不同种类的遥感测绘光学系统,可以最大程度利用平台资源,满足遥感测绘需求。








2015, 8(5): 725-735.
doi: 10.3788/CO.20150805.0725
摘要:
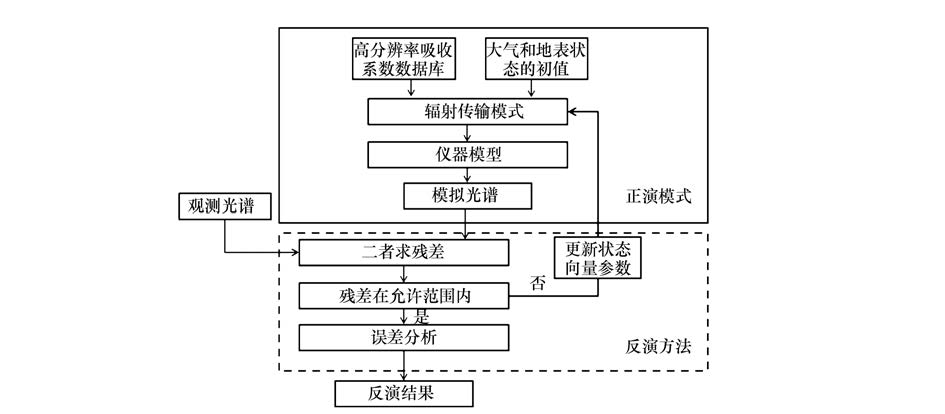
在应用需求的拉动和高光谱技术发展的驱动下,利用被动式星载近红外高分辨率光谱仪探测大气CO2分子柱含量已成为一个相当活跃的研究领域。本文介绍了卫星遥感CO2在科学和社会发展方面的基本需求,分析了被动遥感CO2的优势和不足;对国际上最新的以美国OCO-2(2014年7月发射)和日本GOSAT(2009年1月发射)为代表的专项CO2遥感任务进行了综述,包括仪器指标、观测模式和定标模式等方面;着重对OCO-2定标精度需求和多种在轨定标方式进行了阐述;从应用和数据处理角度,简要比较了光栅和傅里叶干涉探测技术探测CO2的主要特点;最后对定量反演原理进行了概述,并对这一领域的未来发展进行了展望。
在应用需求的拉动和高光谱技术发展的驱动下,利用被动式星载近红外高分辨率光谱仪探测大气CO2分子柱含量已成为一个相当活跃的研究领域。本文介绍了卫星遥感CO2在科学和社会发展方面的基本需求,分析了被动遥感CO2的优势和不足;对国际上最新的以美国OCO-2(2014年7月发射)和日本GOSAT(2009年1月发射)为代表的专项CO2遥感任务进行了综述,包括仪器指标、观测模式和定标模式等方面;着重对OCO-2定标精度需求和多种在轨定标方式进行了阐述;从应用和数据处理角度,简要比较了光栅和傅里叶干涉探测技术探测CO2的主要特点;最后对定量反演原理进行了概述,并对这一领域的未来发展进行了展望。
2015, 8(5): 736-743.
doi: 10.3788/CO.20150805.0736
摘要:
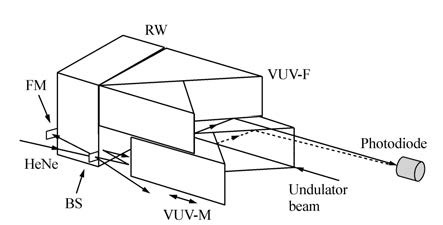
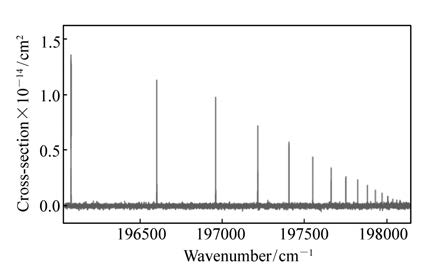
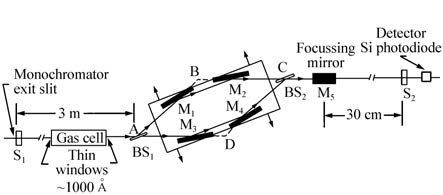
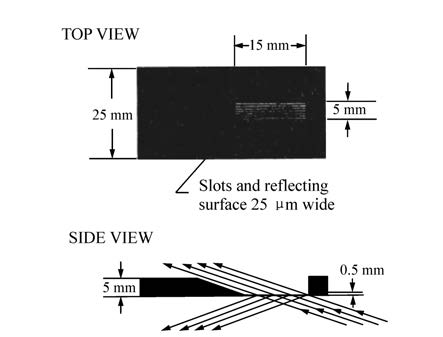
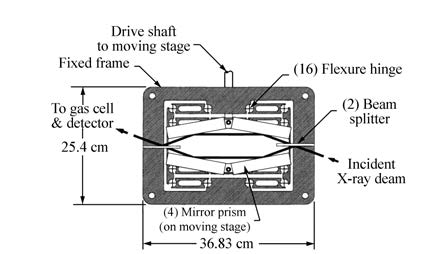
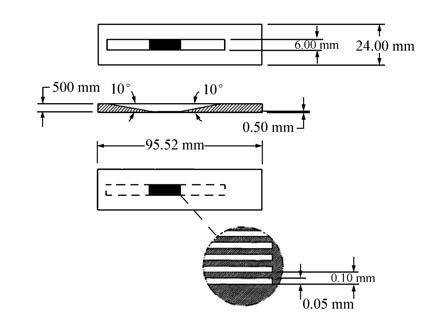
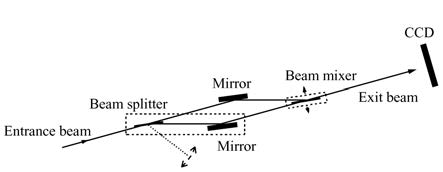
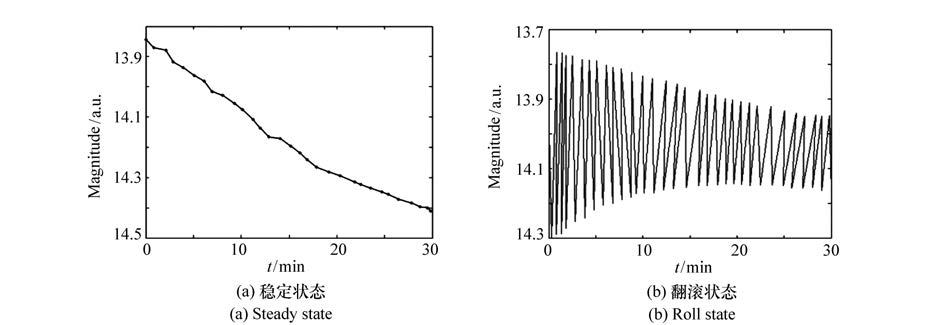
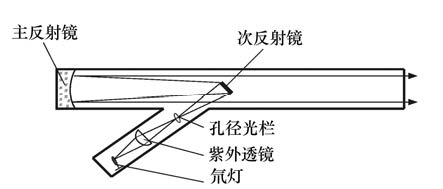
本文分析了真空紫外分波前傅里叶变换光谱技术原理、特点及其必要性,介绍了几种采用真空紫外分波前傅里叶变换光谱技术的光谱仪的代表性结构、性能和应用,探讨了国内真空紫外分波前傅里叶变换光谱技术的未来发展,为获得高分辨率真空紫外光谱提供了另一途径。
本文分析了真空紫外分波前傅里叶变换光谱技术原理、特点及其必要性,介绍了几种采用真空紫外分波前傅里叶变换光谱技术的光谱仪的代表性结构、性能和应用,探讨了国内真空紫外分波前傅里叶变换光谱技术的未来发展,为获得高分辨率真空紫外光谱提供了另一途径。




2015, 8(5): 744-754.
doi: 10.3788/CO.20150805.0744
摘要:
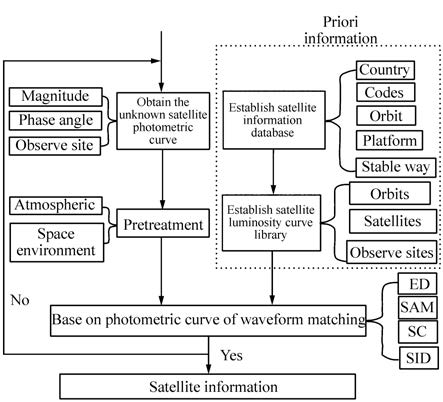
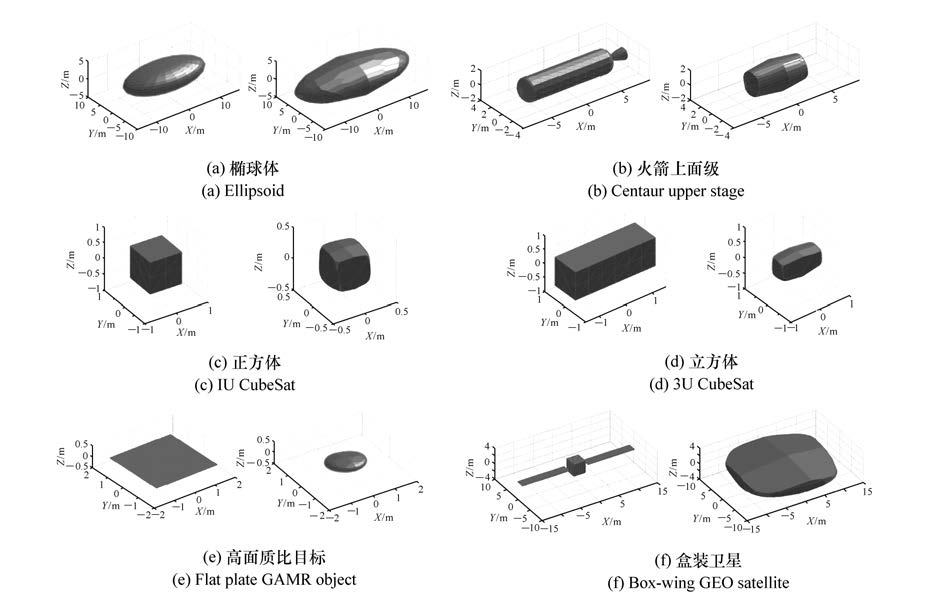
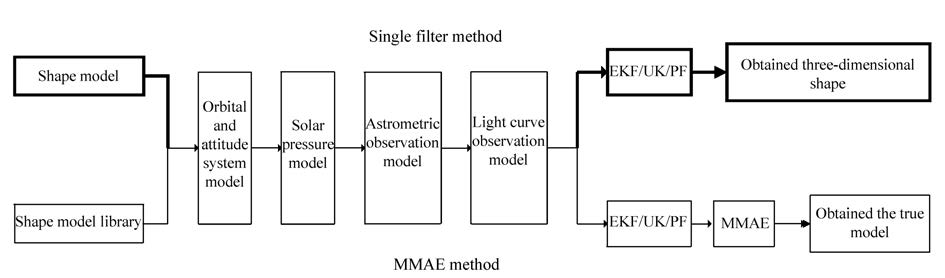
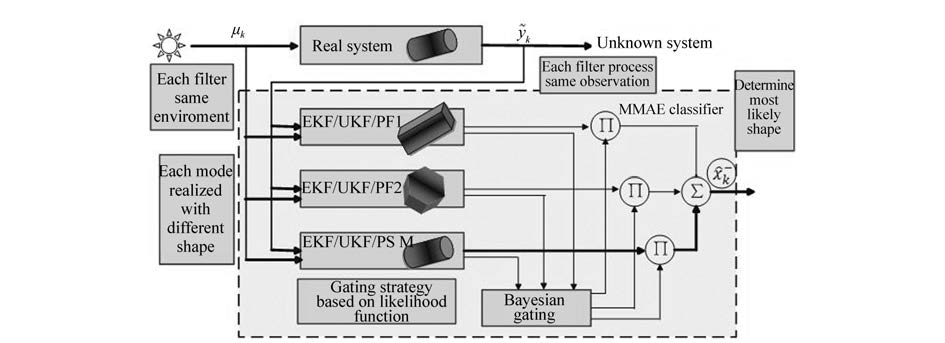
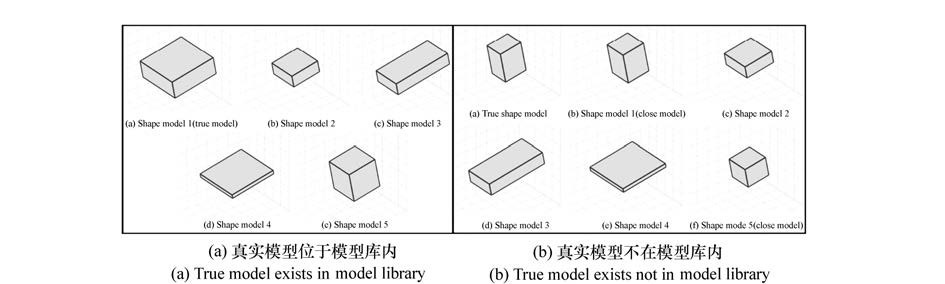
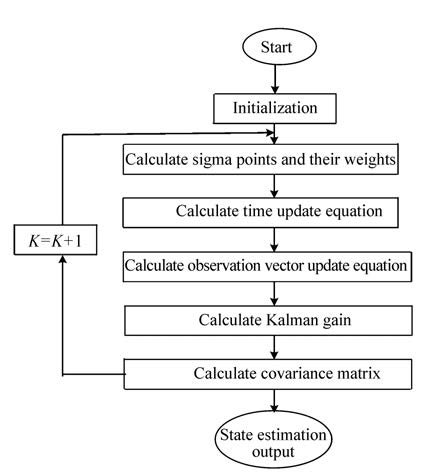
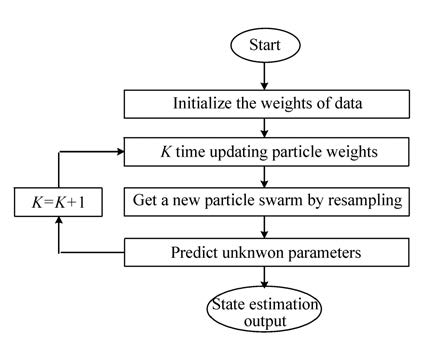
光度曲线反演空间目标形状和姿态等参数为空间目标监视与识别提供了新的技术途径。首先分析了基于光度曲线反演空间目标信息的必要性,之后通过关注和跟踪国内外最新发展情况,全面总结了目前进行形状反演的3种主流方法的研究现状及优缺点,对3种反演方法进行了比较分析,指出基于非线性滤波技术的形状反演方法是未来的主要发展方向,并分析了3种非线性滤波技术的优缺点。最后针对反演存在的问题,指出了基于改进的实时性更好的粒子滤波算法,融合多种传感器信息反演几何形状和表面材料更为复杂的空间目标是下一步研究发展的主要方向。
光度曲线反演空间目标形状和姿态等参数为空间目标监视与识别提供了新的技术途径。首先分析了基于光度曲线反演空间目标信息的必要性,之后通过关注和跟踪国内外最新发展情况,全面总结了目前进行形状反演的3种主流方法的研究现状及优缺点,对3种反演方法进行了比较分析,指出基于非线性滤波技术的形状反演方法是未来的主要发展方向,并分析了3种非线性滤波技术的优缺点。最后针对反演存在的问题,指出了基于改进的实时性更好的粒子滤波算法,融合多种传感器信息反演几何形状和表面材料更为复杂的空间目标是下一步研究发展的主要方向。





2015, 8(5): 755-767.
doi: 10.3788/CO.20150805.0755
摘要:
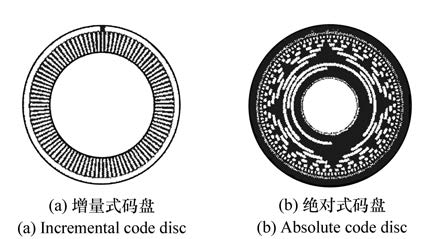
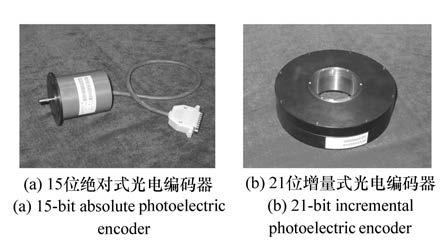
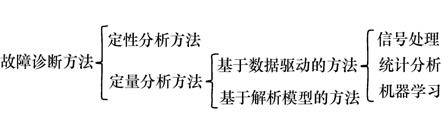
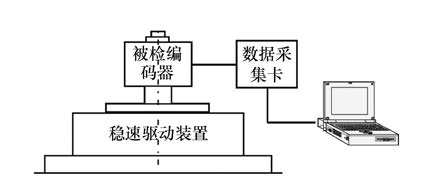
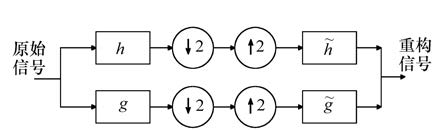
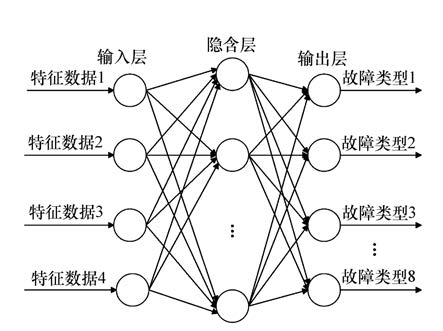
光电编码器是以高精度计量光栅为检测元件的高精度数字化测角设备,在当代自动化领域应用广泛。为深入研究光电编码器故障诊断方法,提高诊断效率,本文首先介绍了光电编码器分类、工作原理;其次,介绍了国内外光电编码器故障诊断关键技术现状,对具有代表性的故障诊断技术进行了分析与比较,总结了各诊断方法的优缺点;最后,对光电编码器诊断技术进行了展望,揭示了其诊断方法向自动化、便携化、动态检测、多技术融合和故障预测方向发展的趋势。
光电编码器是以高精度计量光栅为检测元件的高精度数字化测角设备,在当代自动化领域应用广泛。为深入研究光电编码器故障诊断方法,提高诊断效率,本文首先介绍了光电编码器分类、工作原理;其次,介绍了国内外光电编码器故障诊断关键技术现状,对具有代表性的故障诊断技术进行了分析与比较,总结了各诊断方法的优缺点;最后,对光电编码器诊断技术进行了展望,揭示了其诊断方法向自动化、便携化、动态检测、多技术融合和故障预测方向发展的趋势。




2015, 8(5): 768-774.
doi: 10.3788/CO.20150805.0768
摘要:
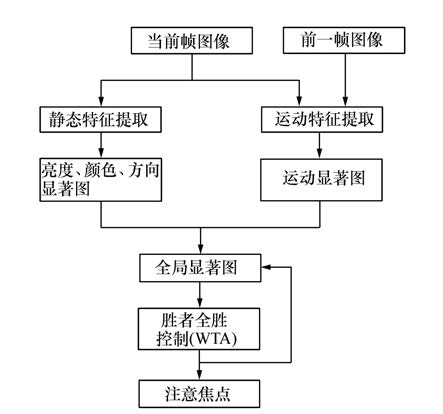
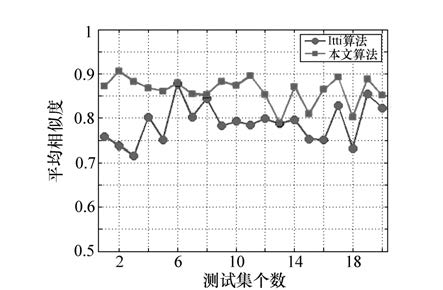
针对传统视觉显著性模型在自顶向下的任务指导和动态信息处理方面的不足,设计并实现了融入运动特征的视觉显著性模型。利用该模型提取了图像的静态特征和动态特征,静态特征的提取在图像的亮度、颜色和方向通道进行,运动特征的提取采用基于多尺度差分的特征提取方法实现,然后各通道分别通过滤波、差分得到显著图,在生成全局显著图时,提出多通道参数估计方法,计算图像感兴趣区域与眼动感兴趣区域的相似度,从而可在图像上准确定位目标位置。针对20组视频图像序列(每组50帧)进行了实验,结果表明:本文算法提取注意焦点即目标区域的平均相似度为0.87,使用本文算法能够根据不同任务情境,选择各特征通道的权重参数,从而可有效提高目标搜索的效率。
针对传统视觉显著性模型在自顶向下的任务指导和动态信息处理方面的不足,设计并实现了融入运动特征的视觉显著性模型。利用该模型提取了图像的静态特征和动态特征,静态特征的提取在图像的亮度、颜色和方向通道进行,运动特征的提取采用基于多尺度差分的特征提取方法实现,然后各通道分别通过滤波、差分得到显著图,在生成全局显著图时,提出多通道参数估计方法,计算图像感兴趣区域与眼动感兴趣区域的相似度,从而可在图像上准确定位目标位置。针对20组视频图像序列(每组50帧)进行了实验,结果表明:本文算法提取注意焦点即目标区域的平均相似度为0.87,使用本文算法能够根据不同任务情境,选择各特征通道的权重参数,从而可有效提高目标搜索的效率。


2015, 8(5): 775-784.
doi: 10.3788/CO.20150805.0775
摘要:
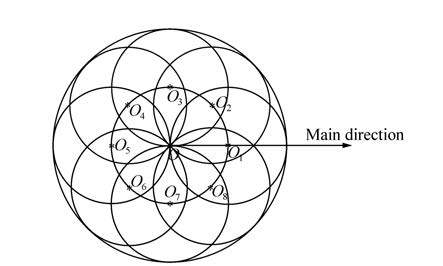
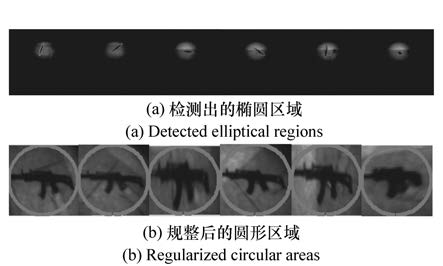
针对激光主动成像的图像特性,提出一种基于快速轮廓转动力矩的目标识别方法。将转动力矩的概念引入目标识别中,提出的快速轮廓转动力矩特征(FCTF)不仅包含了轮廓的尺寸、位置、规则度以及目标的亮暗等信息,同时对于旋转、尺度缩放等变换具有不变性。采用转动力矩的快速计算方法,提高了识别算法的计算效率。识别算法首先使用最大稳定极值区域(MSER)算法检测出目标特征区域,并将其变换为圆形区域,然后结合快速转动力矩特征算法提取出目标区域的局部不变特征,最后输入训练好的支持向量机分类器进行识别。实验结果表明相比于已有的激光主动成像目标识别方法,所提算法对于旋转、仿射变换均具有更高的识别率,同时单帧平均运算时间为9.68 ms,满足激光主动成像目标识别系统实时性的要求。
针对激光主动成像的图像特性,提出一种基于快速轮廓转动力矩的目标识别方法。将转动力矩的概念引入目标识别中,提出的快速轮廓转动力矩特征(FCTF)不仅包含了轮廓的尺寸、位置、规则度以及目标的亮暗等信息,同时对于旋转、尺度缩放等变换具有不变性。采用转动力矩的快速计算方法,提高了识别算法的计算效率。识别算法首先使用最大稳定极值区域(MSER)算法检测出目标特征区域,并将其变换为圆形区域,然后结合快速转动力矩特征算法提取出目标区域的局部不变特征,最后输入训练好的支持向量机分类器进行识别。实验结果表明相比于已有的激光主动成像目标识别方法,所提算法对于旋转、仿射变换均具有更高的识别率,同时单帧平均运算时间为9.68 ms,满足激光主动成像目标识别系统实时性的要求。



2015, 8(5): 785-793.
doi: 10.3788/CO.20150805.0785
摘要:
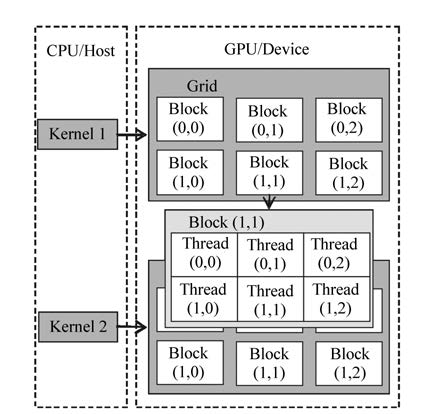
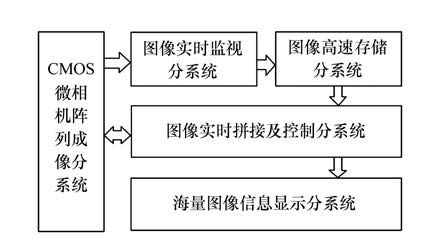
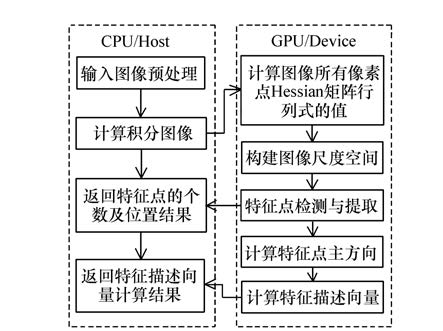
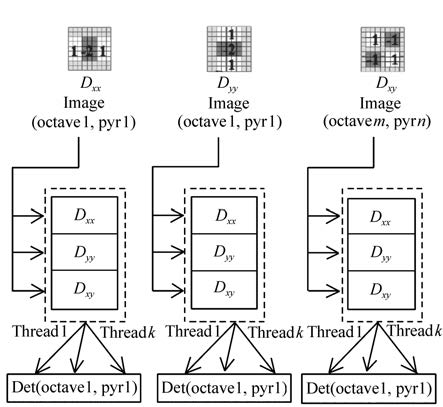
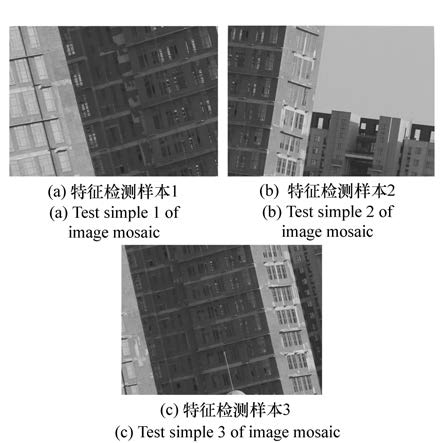
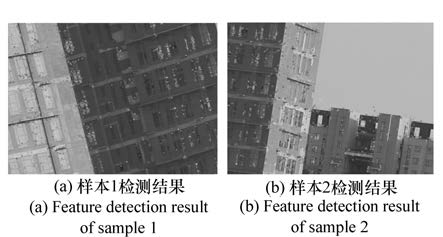
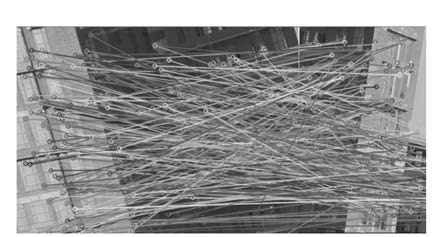
为了满足工程应用对图像拼接实时性的要求,依据已设计完成的基于同心球透镜与微相机拼接阵列复合结构的十亿像素瞬态成像系统,提出一种基于统一计算设备架构(CUDA)与先验信息相结合的自适应图像拼接并行加速算法。首先,利用高精度四维标定平台对相邻微相机成像重叠区域进行预标定。接着,采用基于CUDA的快速鲁棒特征(SURF)方法检测提取重叠区域图像的候选特征点集。然后,运用基本线性代数运算子程序(CUBLAS)加速基于随机KD-Tree索引的近似最近邻搜索(ANN)算法,用于获取初始匹配点对。最后,提出一种改进的并行渐近式抽样一致性(IPROSAC)算法,用于剔除误匹配点对和空间变换矩阵的参数估计,从而得到拼接图像的空间几何变换关系。实验结果表明,该算法的图像拼接时间为287 ms,与单独采用CPU串行算法相比速度提高了近30倍。
为了满足工程应用对图像拼接实时性的要求,依据已设计完成的基于同心球透镜与微相机拼接阵列复合结构的十亿像素瞬态成像系统,提出一种基于统一计算设备架构(CUDA)与先验信息相结合的自适应图像拼接并行加速算法。首先,利用高精度四维标定平台对相邻微相机成像重叠区域进行预标定。接着,采用基于CUDA的快速鲁棒特征(SURF)方法检测提取重叠区域图像的候选特征点集。然后,运用基本线性代数运算子程序(CUBLAS)加速基于随机KD-Tree索引的近似最近邻搜索(ANN)算法,用于获取初始匹配点对。最后,提出一种改进的并行渐近式抽样一致性(IPROSAC)算法,用于剔除误匹配点对和空间变换矩阵的参数估计,从而得到拼接图像的空间几何变换关系。实验结果表明,该算法的图像拼接时间为287 ms,与单独采用CPU串行算法相比速度提高了近30倍。



2015, 8(5): 794-799.
doi: 10.3788/CO.20150805.0794
摘要:
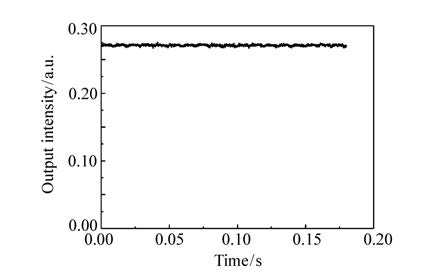
本文报道了一种全固态腔内和频608.1 nm激光器。在激光谐振腔两个分臂中,两支激光二极管分别泵浦Nd: YVO4和Nd: YAG晶体,分别选择1 342 nm波长(Nd: YVO4晶体的4F3/2-4I13/2谱线)与1 112 nm波长(Nd: YAG晶体的4F3/2-4I11/2谱线)振荡并进行腔内和频。通过优化谐振腔设计,腔内两个波长获得了较好的模式匹配。在两个分臂的交叠部分,利用LBO I类相位匹配进行和频,获得和频608.1 nm激光输出。实验表明,当Nd: YVO4与Nd: YAG晶体泵浦功率分别为600和740 mW时,获得了功率为23.8 mW、波长为608.1 nm激光输出,激光输出稳定、噪声低。利用本文提出的和频结构是获得608.1 nm激光输出较为有效的方法。
本文报道了一种全固态腔内和频608.1 nm激光器。在激光谐振腔两个分臂中,两支激光二极管分别泵浦Nd: YVO4和Nd: YAG晶体,分别选择1 342 nm波长(Nd: YVO4晶体的4F3/2-4I13/2谱线)与1 112 nm波长(Nd: YAG晶体的4F3/2-4I11/2谱线)振荡并进行腔内和频。通过优化谐振腔设计,腔内两个波长获得了较好的模式匹配。在两个分臂的交叠部分,利用LBO I类相位匹配进行和频,获得和频608.1 nm激光输出。实验表明,当Nd: YVO4与Nd: YAG晶体泵浦功率分别为600和740 mW时,获得了功率为23.8 mW、波长为608.1 nm激光输出,激光输出稳定、噪声低。利用本文提出的和频结构是获得608.1 nm激光输出较为有效的方法。



2015, 8(5): 800-805.
doi: 10.3788/CO.20150805.0800
摘要:
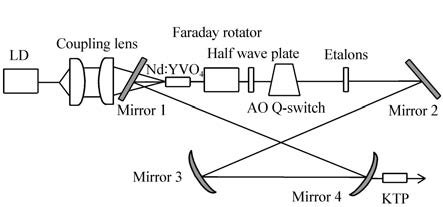
为了研制激光干涉成像所需的主振荡功率放大(MOPA)结构脉冲单频激光器,本文完成MOPA激光器的种子源即声光调Q脉冲单频1 064 nm激光器的特性研究,同时完成种子源腔外倍频绿光特性研究。脉冲单频激光器采用声光调Q模块实现脉宽约20 ns的1 064 nm脉冲激光输出,采用环形腔设计并采用一组不同厚度的标准具实现单纵模运转。实验研究基频1 064nm和倍频532 nm激光脉冲的线宽,得出在全脉宽范围内都具有较高时间相干性的结论。实验分别获得脉宽约28 ns峰值功率约6.5 kW的1 064 nm脉冲单频激光和脉宽约20 ns、峰值功率约0.5 kW的532 nm脉冲单频激光,腔外倍频效率为5.6%。实验同时也验证了腔外倍频的激光脉宽压缩效应。
为了研制激光干涉成像所需的主振荡功率放大(MOPA)结构脉冲单频激光器,本文完成MOPA激光器的种子源即声光调Q脉冲单频1 064 nm激光器的特性研究,同时完成种子源腔外倍频绿光特性研究。脉冲单频激光器采用声光调Q模块实现脉宽约20 ns的1 064 nm脉冲激光输出,采用环形腔设计并采用一组不同厚度的标准具实现单纵模运转。实验研究基频1 064nm和倍频532 nm激光脉冲的线宽,得出在全脉宽范围内都具有较高时间相干性的结论。实验分别获得脉宽约28 ns峰值功率约6.5 kW的1 064 nm脉冲单频激光和脉宽约20 ns、峰值功率约0.5 kW的532 nm脉冲单频激光,腔外倍频效率为5.6%。实验同时也验证了腔外倍频的激光脉宽压缩效应。





2015, 8(5): 806-813.
doi: 10.3788/CO.20150805.0806
摘要:
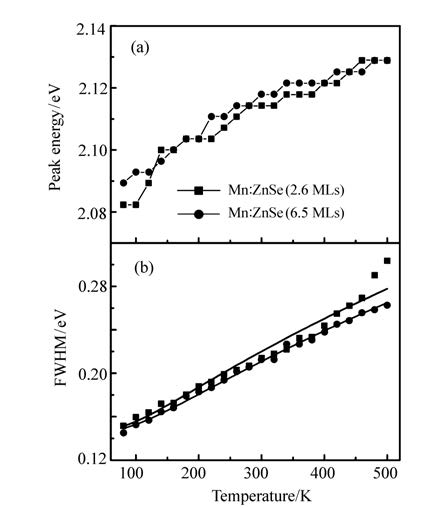
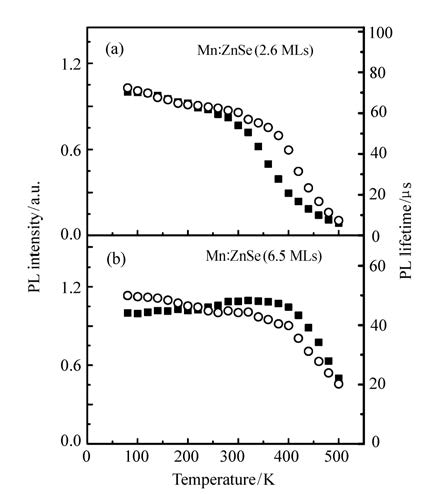
量子点(QD)照明器件中电流导致的焦耳热会使其工作温度高于室温,因此研究量子点的发光热稳定性十分重要。本文利用稳态光谱和时间分辨光谱研究了具有不同壳层厚度的Mn掺杂ZnSe(Mn: ZnSe)量子点的变温发光性质,温度范围是80~500 K。实验结果表明,厚壳层(6.5单层(MLs))Mn: ZnSe量子点的发光热稳定性要优于薄壳层(2.6 MLs)的量子点。从80 K升温到400 K的过程中,厚壳层Mn: ZnSe量子点的发光几乎没有发生热猝灭,发光量子效率在400 K高温下依然可以达到60%。通过对比Mn: ZnSe量子点的变温发光强度与荧光寿命,对Mn: ZnSe量子点发光热猝灭机制进行了讨论。最后,为了研究Mn: ZnSe量子点的发光热猝灭是否为本征猝灭,对具有不同壳层厚度的Mn: ZnSe量子点进行了加热-冷却循环(300-500-300 K)测试,发现厚壳层的Mn: ZnSe量子点的发光在循环中基本可逆。因此,Mn: ZnSe量子点可以适用于照明器件,即使器件中会出现不可避免的较强热效应。
量子点(QD)照明器件中电流导致的焦耳热会使其工作温度高于室温,因此研究量子点的发光热稳定性十分重要。本文利用稳态光谱和时间分辨光谱研究了具有不同壳层厚度的Mn掺杂ZnSe(Mn: ZnSe)量子点的变温发光性质,温度范围是80~500 K。实验结果表明,厚壳层(6.5单层(MLs))Mn: ZnSe量子点的发光热稳定性要优于薄壳层(2.6 MLs)的量子点。从80 K升温到400 K的过程中,厚壳层Mn: ZnSe量子点的发光几乎没有发生热猝灭,发光量子效率在400 K高温下依然可以达到60%。通过对比Mn: ZnSe量子点的变温发光强度与荧光寿命,对Mn: ZnSe量子点发光热猝灭机制进行了讨论。最后,为了研究Mn: ZnSe量子点的发光热猝灭是否为本征猝灭,对具有不同壳层厚度的Mn: ZnSe量子点进行了加热-冷却循环(300-500-300 K)测试,发现厚壳层的Mn: ZnSe量子点的发光在循环中基本可逆。因此,Mn: ZnSe量子点可以适用于照明器件,即使器件中会出现不可避免的较强热效应。


2015, 8(5): 814-822.
doi: 10.3788/CO.20150805.0814
摘要:
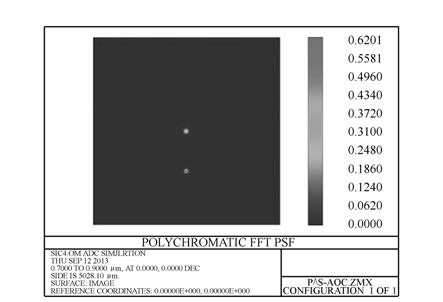
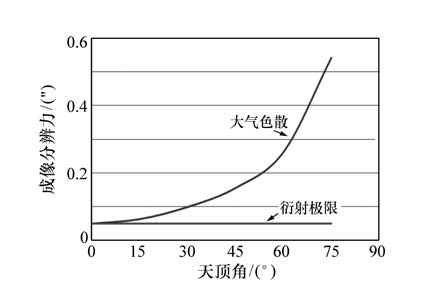
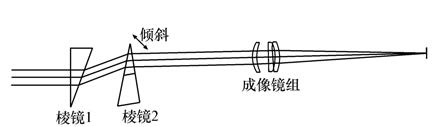
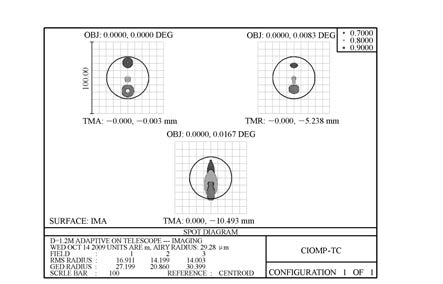
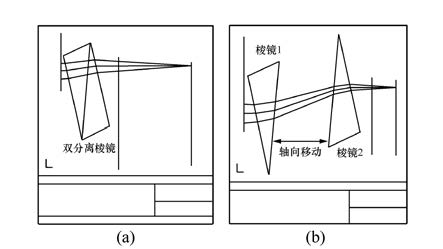
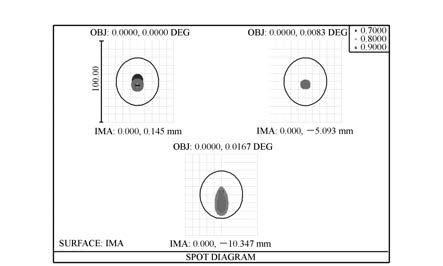
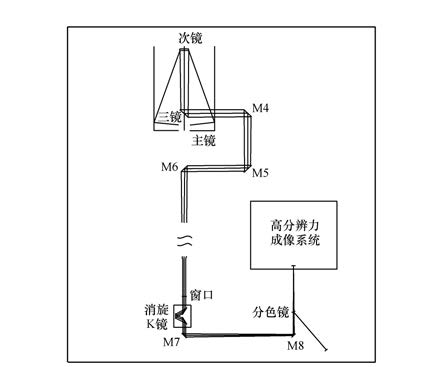
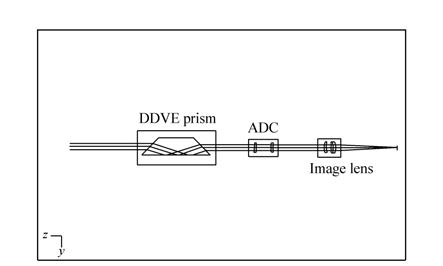
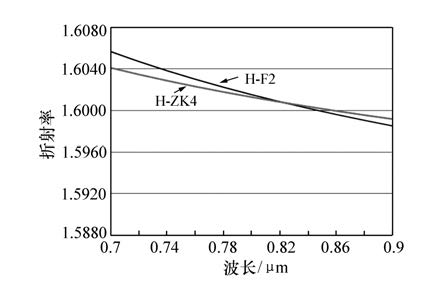
本文分析研究大气色散对4 m望远镜成像系统分辨率的影响及校正方法。首先计算分析了大气色散对其成像分辨力的影响,计算结果表明,天顶角大于15°时,大气色散开始影响系统成像分辨力,天顶角大于45°时,对系统成像分辨力有着较为严重的影响,需要设置大气色散校正器来进行消除。本文列举了3种大气色散校正器的实现形式,分别比较了它们的优缺点,最后选择了胶合棱镜旋转补偿的形式来消除大气色散对4 m望远镜高分辨力成像系统的影响。基于4 m望远镜高分辨力成像系统的特点,将大气色散校正器放置于成像元件前的平行光路中,并利用光学设计软件对不同天顶角与大气色散校正器的旋转角度进行了仿真分析,该大气色散校正器的最大楔角为9.65°,旋转精度为±0.1°,对系统分辨力影响为1/1 000。分析结果表明,旋转精度完全能够满足系统成像分辨力的要求,证明本文对大气色散的影响分析和大气色散校正器的设计是有效的。
本文分析研究大气色散对4 m望远镜成像系统分辨率的影响及校正方法。首先计算分析了大气色散对其成像分辨力的影响,计算结果表明,天顶角大于15°时,大气色散开始影响系统成像分辨力,天顶角大于45°时,对系统成像分辨力有着较为严重的影响,需要设置大气色散校正器来进行消除。本文列举了3种大气色散校正器的实现形式,分别比较了它们的优缺点,最后选择了胶合棱镜旋转补偿的形式来消除大气色散对4 m望远镜高分辨力成像系统的影响。基于4 m望远镜高分辨力成像系统的特点,将大气色散校正器放置于成像元件前的平行光路中,并利用光学设计软件对不同天顶角与大气色散校正器的旋转角度进行了仿真分析,该大气色散校正器的最大楔角为9.65°,旋转精度为±0.1°,对系统分辨力影响为1/1 000。分析结果表明,旋转精度完全能够满足系统成像分辨力的要求,证明本文对大气色散的影响分析和大气色散校正器的设计是有效的。





2015, 8(5): 823-831.
doi: 10.3788/CO.20150805.0823
摘要:
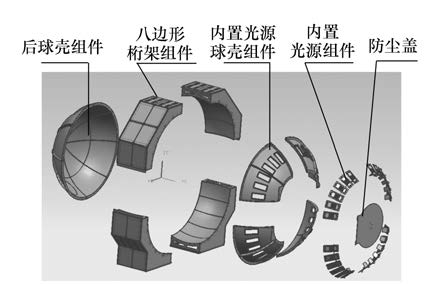
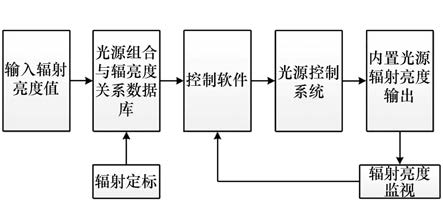
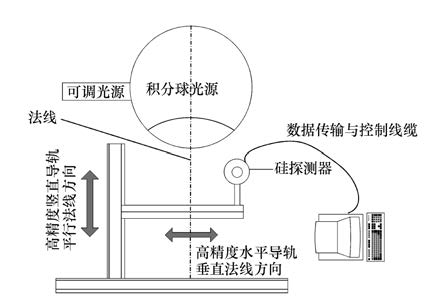
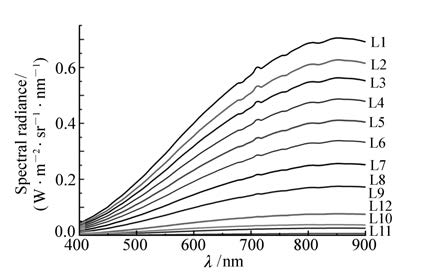
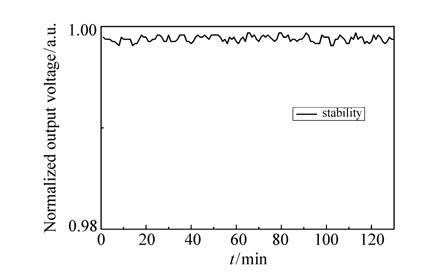
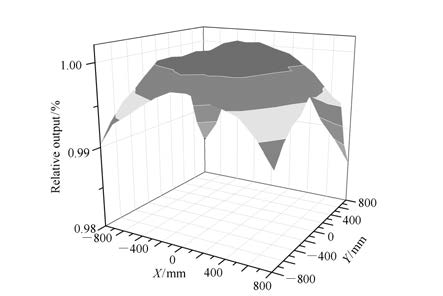
针对目前光学口径不断增大的空间光学遥感器实验室辐射定标的需求,基于近距离扩展源照明方法设计了400~900 nm谱段内最大积分辐射亮度为200 W/(m2·sr)的4 m直径均匀扩展定标光源。该定标光源内径为4 000 mm,出光面直径为1 600 mm。对该定标光源光机结构进行了详细设计,利用光纤光谱仪监视输出的相对光谱分布,CPLD结合单片机实现输出光谱辐亮度值无人值守智能化远程自动控制。使用PR 735光谱辐射计测量该光源400~900 nm谱段内最大积分辐射亮度为222.62 W/(m2·sr),通过对定标光源的稳定性、面均匀性及角度均匀性测试,分析了定标光源的测量不确定度为3.57%。实验结果表明:该定标光源可以满足口径1 600 mm以下可见/近红外空间光学载荷的实验室辐射定标需要,并可实现智能程控化控制,提高了定标测试精度。
针对目前光学口径不断增大的空间光学遥感器实验室辐射定标的需求,基于近距离扩展源照明方法设计了400~900 nm谱段内最大积分辐射亮度为200 W/(m2·sr)的4 m直径均匀扩展定标光源。该定标光源内径为4 000 mm,出光面直径为1 600 mm。对该定标光源光机结构进行了详细设计,利用光纤光谱仪监视输出的相对光谱分布,CPLD结合单片机实现输出光谱辐亮度值无人值守智能化远程自动控制。使用PR 735光谱辐射计测量该光源400~900 nm谱段内最大积分辐射亮度为222.62 W/(m2·sr),通过对定标光源的稳定性、面均匀性及角度均匀性测试,分析了定标光源的测量不确定度为3.57%。实验结果表明:该定标光源可以满足口径1 600 mm以下可见/近红外空间光学载荷的实验室辐射定标需要,并可实现智能程控化控制,提高了定标测试精度。


2015, 8(5): 832-839.
doi: 10.3788/CO.20150805.0832
摘要:
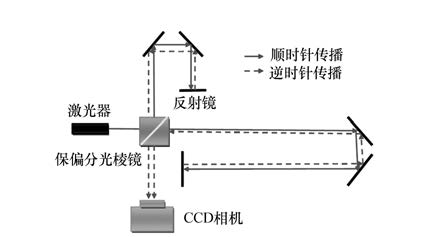
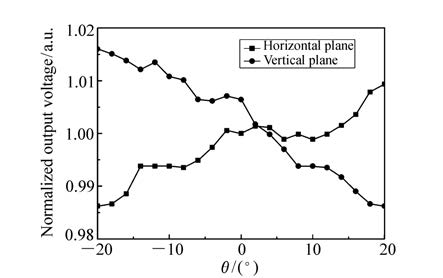
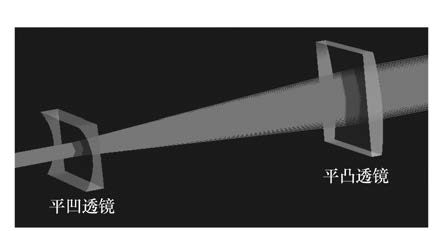
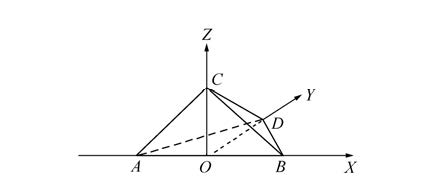
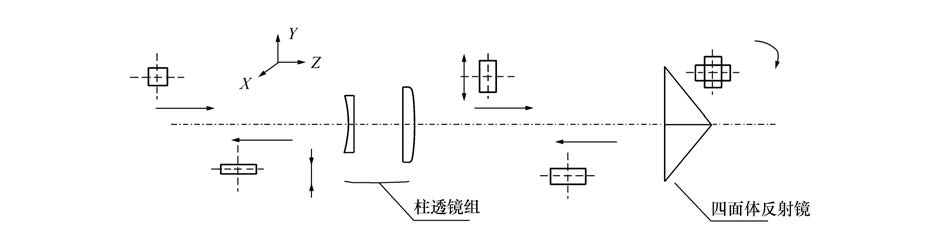
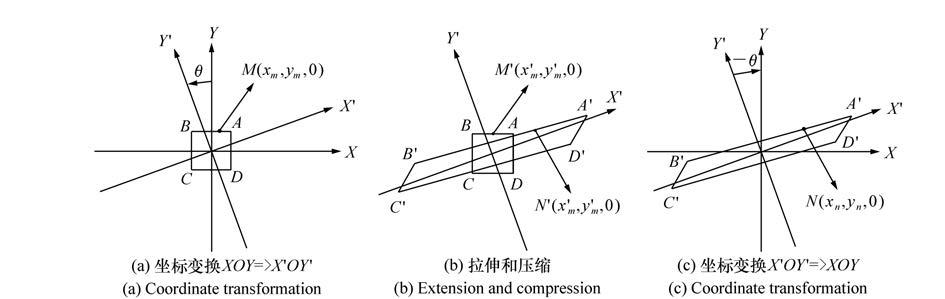
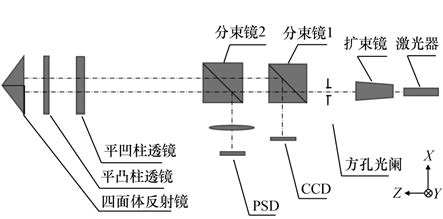
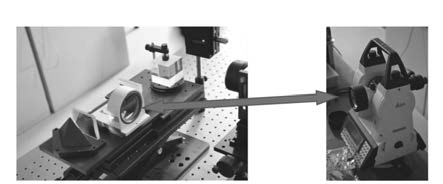
为了实现三维角度的同时测量,提出了一种基于柱透镜组的小角度测量方法。首先,在传统激光准直法的基础上,采用柱透镜组和特殊的四面体反射镜代替平面反射镜作为合作目标,用于表征三维角度的变化。然后,利用矩阵分析光束在传播过程中的形状、位置参数变化,说明了采用柱透镜组进行小角度测量的算法。最后,在实验室条件下对扭转角的测量进行了实验验证。实验结果表明:在工作距离1.2 m,光束直径5 mm时,扭转角测量范围20',测量误差RMS值优于8",基本满足非接触小角度测量的要求,具有一定的工程实用价值。
为了实现三维角度的同时测量,提出了一种基于柱透镜组的小角度测量方法。首先,在传统激光准直法的基础上,采用柱透镜组和特殊的四面体反射镜代替平面反射镜作为合作目标,用于表征三维角度的变化。然后,利用矩阵分析光束在传播过程中的形状、位置参数变化,说明了采用柱透镜组进行小角度测量的算法。最后,在实验室条件下对扭转角的测量进行了实验验证。实验结果表明:在工作距离1.2 m,光束直径5 mm时,扭转角测量范围20',测量误差RMS值优于8",基本满足非接触小角度测量的要求,具有一定的工程实用价值。



2015, 8(5): 840-846.
doi: 10.3788/CO.20150805.0840
摘要:
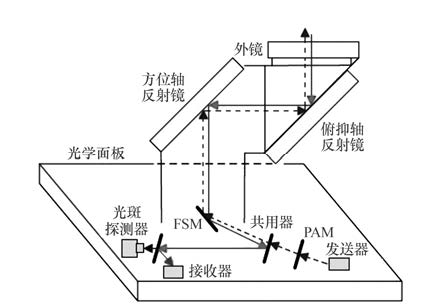
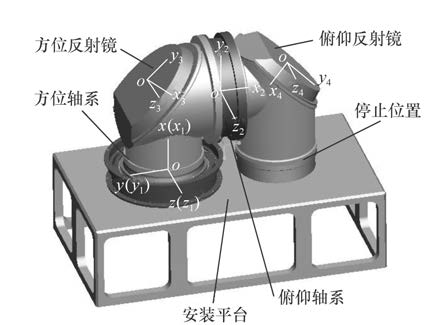
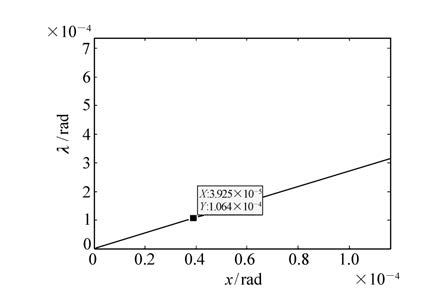
本文提出了一种机构指向误差计算方法。首先,采用反射镜单位法向量和光束单位方向向量分别表示机构反射镜的姿态和激光束的传播方向,接着采用坐标变换和矩阵传递求出反射镜在总体坐标系中的单位法向量,通过向量对称计算出激光束经过两次镜面反射后的方向向量,最后将机构各参数的理论值和实际值代入上述算法,分别求出激光束经过两次镜面反射后的理论方向向量和实际方向向量,两向量夹角即为机构的指向误差。在得到指向误差和部件误差的关系式后,机构设计时即可通过机构指向误差反计算求出部件的误差值。结果表明:机构物理样机测试指向误差值为0.005 7°,将机构部件参数测试误差值代入误差正计算算式,得出机构的指向误差值为0.006 1°,以该指向误差通过反计算得出的参数平均误差值为0.002 25°,与测试结果相近,可以为机构的精度设计提供参考依据。
本文提出了一种机构指向误差计算方法。首先,采用反射镜单位法向量和光束单位方向向量分别表示机构反射镜的姿态和激光束的传播方向,接着采用坐标变换和矩阵传递求出反射镜在总体坐标系中的单位法向量,通过向量对称计算出激光束经过两次镜面反射后的方向向量,最后将机构各参数的理论值和实际值代入上述算法,分别求出激光束经过两次镜面反射后的理论方向向量和实际方向向量,两向量夹角即为机构的指向误差。在得到指向误差和部件误差的关系式后,机构设计时即可通过机构指向误差反计算求出部件的误差值。结果表明:机构物理样机测试指向误差值为0.005 7°,将机构部件参数测试误差值代入误差正计算算式,得出机构的指向误差值为0.006 1°,以该指向误差通过反计算得出的参数平均误差值为0.002 25°,与测试结果相近,可以为机构的精度设计提供参考依据。
2015, 8(5): 847-872.
doi: 10.3788/CO.20150805.0847
摘要:
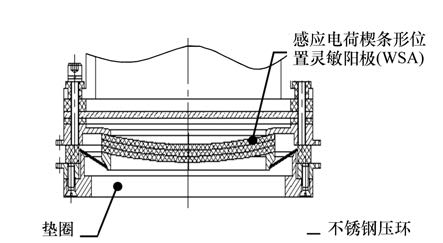
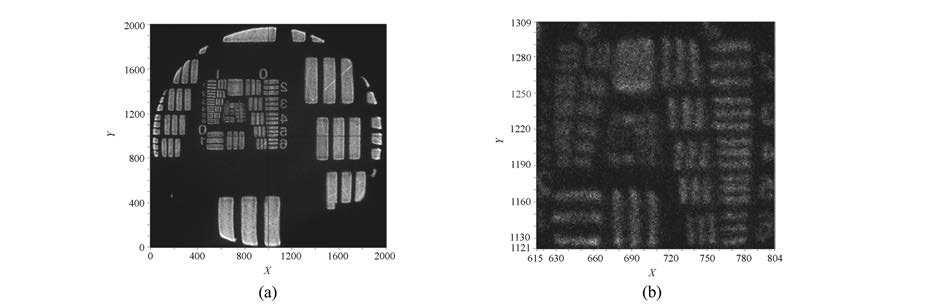
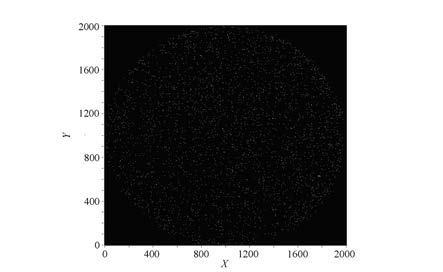
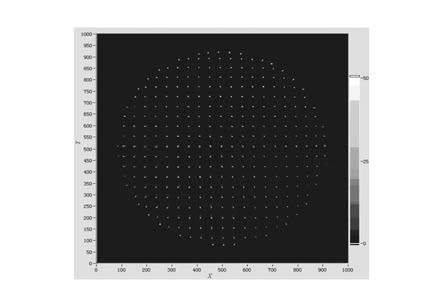
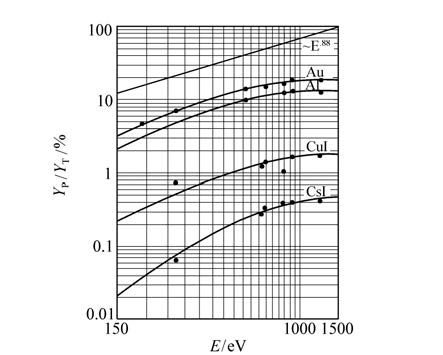
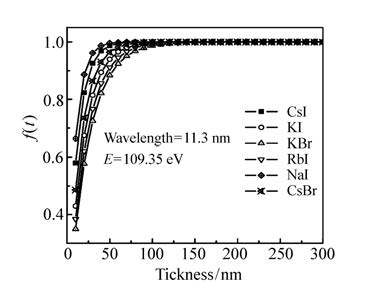
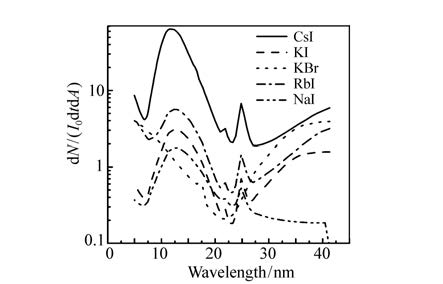
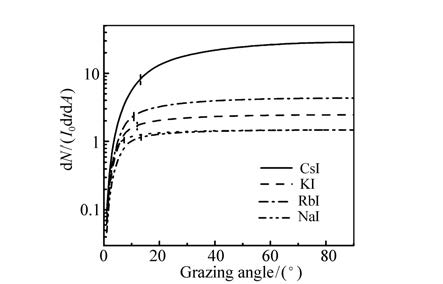
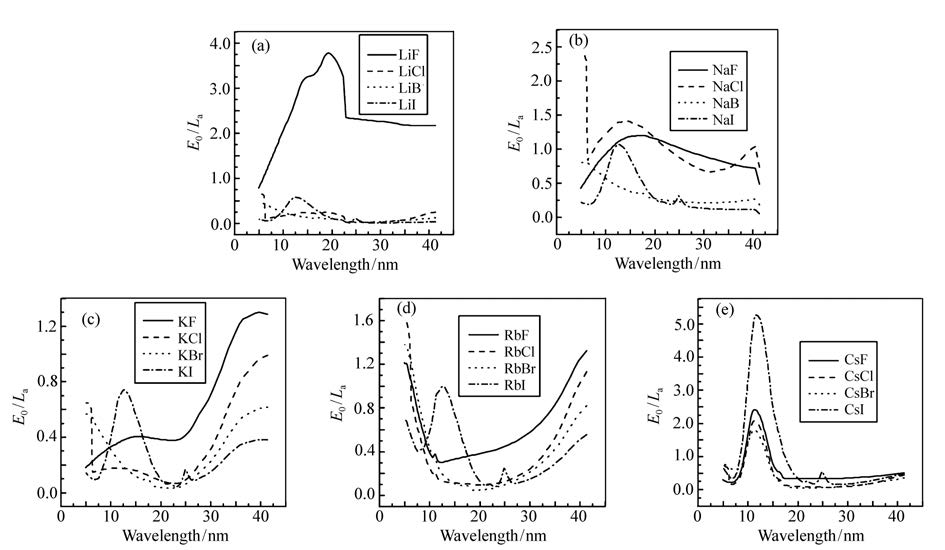
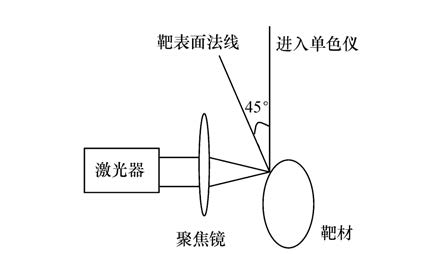
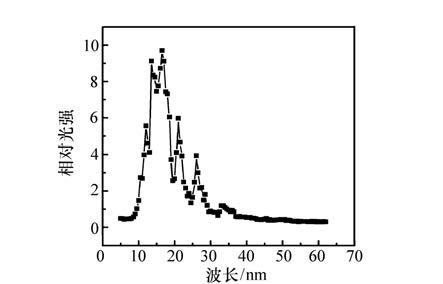
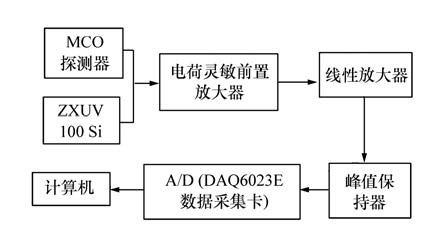
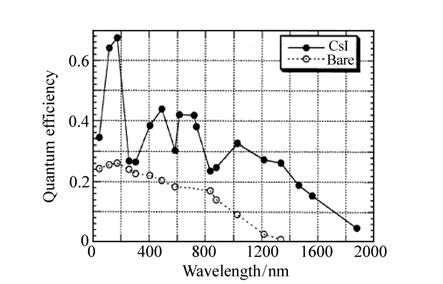
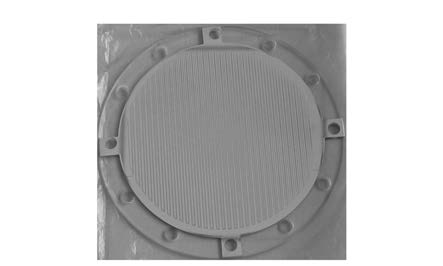
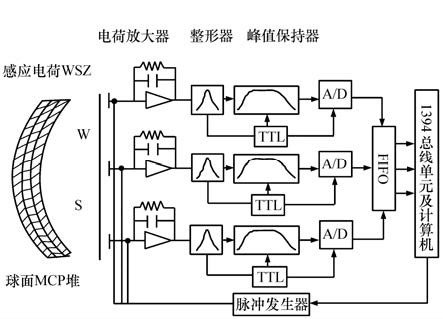
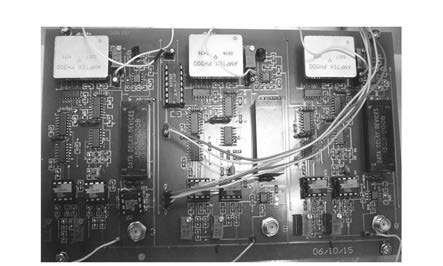
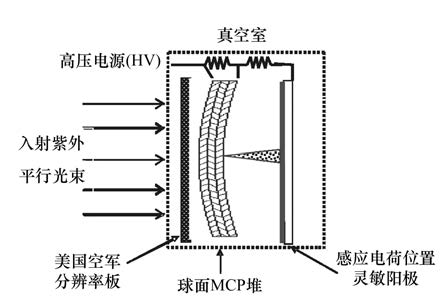
本项目对我国空间探测的极紫外(EUV)波段大视场相机所需求的球面光子计数成像探测器的关键技术进行了研究。首先,建立了光阴极材料次级电子产出模型,利用该模型计算了软X射线-EUV波段常用的光电阴极材料—碱卤化物的次级电子产出,分析了微通道板(MCP)的次级电子产出。建立了测量MCP量子探测效率的装置,并推导出MCP量子探测效率的计算公式,测量了MCP在软X射线-EUV波段的量子效率以及MCP量子效率随掠入射角的变化。其次,建立了球面实芯微通道板的制备装置,利用高温热成型方法制备出曲率半径为150 mm球面MCP,利用光刻技术制备出有效直径为48 mm的楔条形感应电荷位置灵敏阳极,在此基础上集成了一套使用球面MCP和感应电荷位置灵敏阳极的两维光子计数成像探测器。再次,研制出包括快速前端模拟电路与后续数字电路的成像读出电路,编制了能矫正图像畸变的图像实时采集和处理软件。最后,建立了MCP探测器空间分辨率、图像线性的检测装置,对研制出的探测器性能进行了检测,检测结果表明:探测器的各项技术指标完全满足要求。
本项目对我国空间探测的极紫外(EUV)波段大视场相机所需求的球面光子计数成像探测器的关键技术进行了研究。首先,建立了光阴极材料次级电子产出模型,利用该模型计算了软X射线-EUV波段常用的光电阴极材料—碱卤化物的次级电子产出,分析了微通道板(MCP)的次级电子产出。建立了测量MCP量子探测效率的装置,并推导出MCP量子探测效率的计算公式,测量了MCP在软X射线-EUV波段的量子效率以及MCP量子效率随掠入射角的变化。其次,建立了球面实芯微通道板的制备装置,利用高温热成型方法制备出曲率半径为150 mm球面MCP,利用光刻技术制备出有效直径为48 mm的楔条形感应电荷位置灵敏阳极,在此基础上集成了一套使用球面MCP和感应电荷位置灵敏阳极的两维光子计数成像探测器。再次,研制出包括快速前端模拟电路与后续数字电路的成像读出电路,编制了能矫正图像畸变的图像实时采集和处理软件。最后,建立了MCP探测器空间分辨率、图像线性的检测装置,对研制出的探测器性能进行了检测,检测结果表明:探测器的各项技术指标完全满足要求。
























2015, 8(5): 873-880.
doi: 10.3788/CO.20150805.0873
摘要:
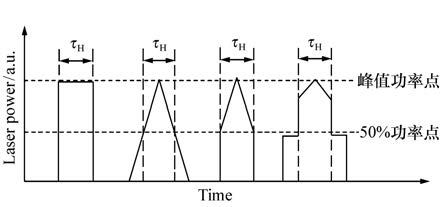
本文根据激光术语国家标准和ISO 国际标准对某些常用激光术语概念的理解与应用问题进行了讨论,并针对国内外科技期刊和专著经常将脉冲功率与峰值功率混为一谈的问题提出了质疑,同时也指出了在激光术语使用过程中存在的其它错误现象,分析了产生类似错误的原因并给出了规范的使用方法。最后,以脉冲激光器术语定义为例通过脉冲激光振荡过程的物理原理分析提出了关于该术语定义的一些修改考虑与建议。
本文根据激光术语国家标准和ISO 国际标准对某些常用激光术语概念的理解与应用问题进行了讨论,并针对国内外科技期刊和专著经常将脉冲功率与峰值功率混为一谈的问题提出了质疑,同时也指出了在激光术语使用过程中存在的其它错误现象,分析了产生类似错误的原因并给出了规范的使用方法。最后,以脉冲激光器术语定义为例通过脉冲激光振荡过程的物理原理分析提出了关于该术语定义的一些修改考虑与建议。