


Application of cylindrical lenses in small angle measurement
-
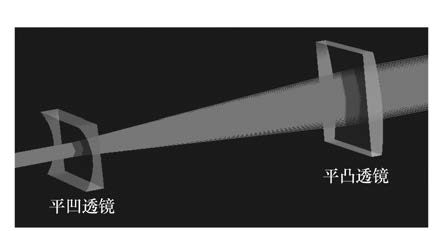
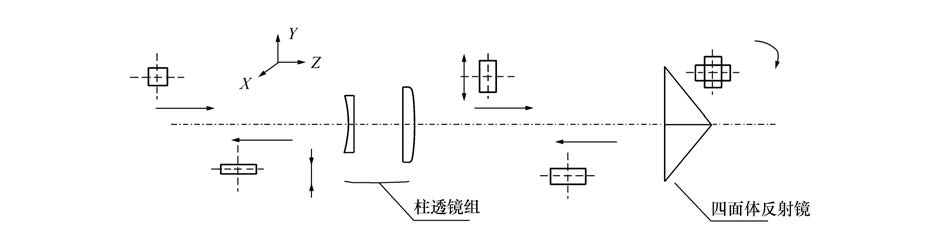
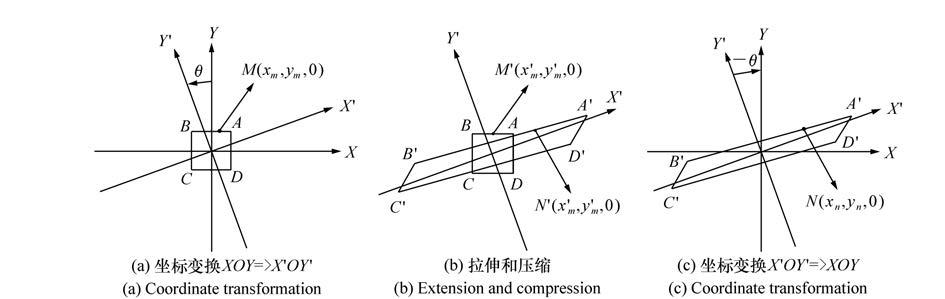
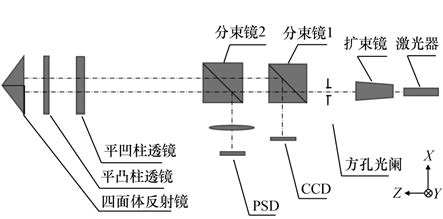
摘要: 为了实现三维角度的同时测量,提出了一种基于柱透镜组的小角度测量方法。首先,在传统激光准直法的基础上,采用柱透镜组和特殊的四面体反射镜代替平面反射镜作为合作目标,用于表征三维角度的变化。然后,利用矩阵分析光束在传播过程中的形状、位置参数变化,说明了采用柱透镜组进行小角度测量的算法。最后,在实验室条件下对扭转角的测量进行了实验验证。实验结果表明:在工作距离1.2 m,光束直径5 mm时,扭转角测量范围20',测量误差RMS值优于8",基本满足非接触小角度测量的要求,具有一定的工程实用价值。Abstract: In order to realize three-dimensional(3D) angle measurement, a photoelectric method using cylindrical lens is presented. First, based on the principle of auto-collimation, a pair of cylindrical lens and a tetrahedral reflector are used instead of a plane mirror to indicate the change of pitch, yaw and roll. Then after the analysis with matrix theory, the relationship between shape and position of the light beam and the angles to be measured is revealed, followed by the algorithm and parameter analysis. Finally, an experiment for roll angle measurement is conducted to test and verify this method. Experimental results show that the system has a range of 20' and an accuracy of error RMS(Root Mean Square) superior to 8" at a working distance of 1.2 m, which can basically satisfy the requirements of non-contact small angle measurement, and has certain practical value in engineering.
-
Key words:
- photoelectric measurement /
- angle measurement /
- laser collimation /
- cylindrical lens
-
[1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] -

 下载:
下载:




图(9) / 表(1)
计量
- 文章访问数: 1957
- HTML全文浏览量: 518
- PDF下载量: 772
- 被引次数: 0
