


-
摘要: 采用基于拉普拉斯算符聚焦形貌恢复方法,提出了模拟目标深度测量的数值模型。数值模拟的核心是基于通过几何光学预测的理想图像的卷积与透镜广义孔径函数的多色点扩散函数,即用聚焦误差替代抛物线圆柱形貌或高斯函数。该模型可以使用基于聚焦形貌恢复方法的传感器真实组件参数、光源光谱、光学系统离差、相机的光谱灵敏度。提出了光学系统离差(消球差、消色差、色差)对确定目标表面形貌的精确度和可靠性的影响。结果表明,该模型可以有效提高实验效率,缩短时滞,降低成本。Abstract: We propose a numerical model for simulation of an object depth measurement by means of a shape from focus method using Laplacian operator. The core of the simulation is based on convolution of an ideal image (predicted by the geometrical optics) with polychromatic point spread functions of a generalized aperture function of lens including focus error instead of more exploited the pillbox shape or the Gaussian functions. The model allows to employ parameters of real components of the sensor based on the method, a light source spectrum, dispersion of an optical system and spectral sensitivity of a camera. The influence of dispersion of optical systems (aberration-free, achromatic and with chromatic aberration) on accuracy and reliability of the determination of the object's surface topography is presented. It is indicated that this model can increase the experiment effectively and decrease time lag with the reducing of operating expenses.
-

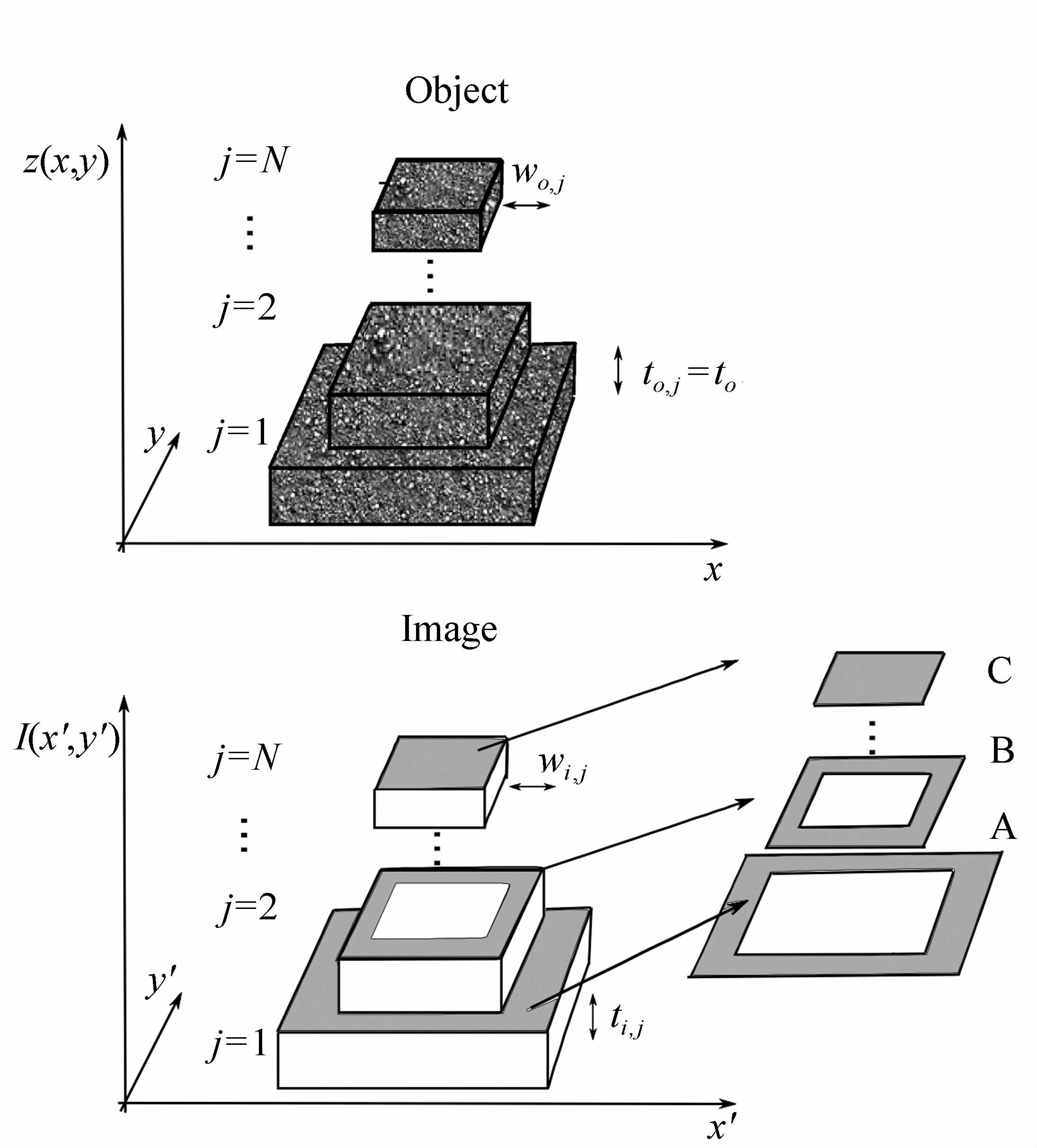
Figure 2. The depth z (x, y) of the 3D object and intensity distribution I (x′, y′) corresponding to its ideal image. The image is divided into the limited regions A, B, …, C (gray areas) , in which the spatially invariant hi, j (x′, y′) is computed for j=1, 2, …, N, while N denotes number of the regions. The depth z (x, y) changes in discrete increments to, j=to (height of a single step) . For simplicity, we assume imaging 1: 1, therefore widths wo, j of individual steps are the same as the widths wi, j of the appropriate regions A, B, …, C

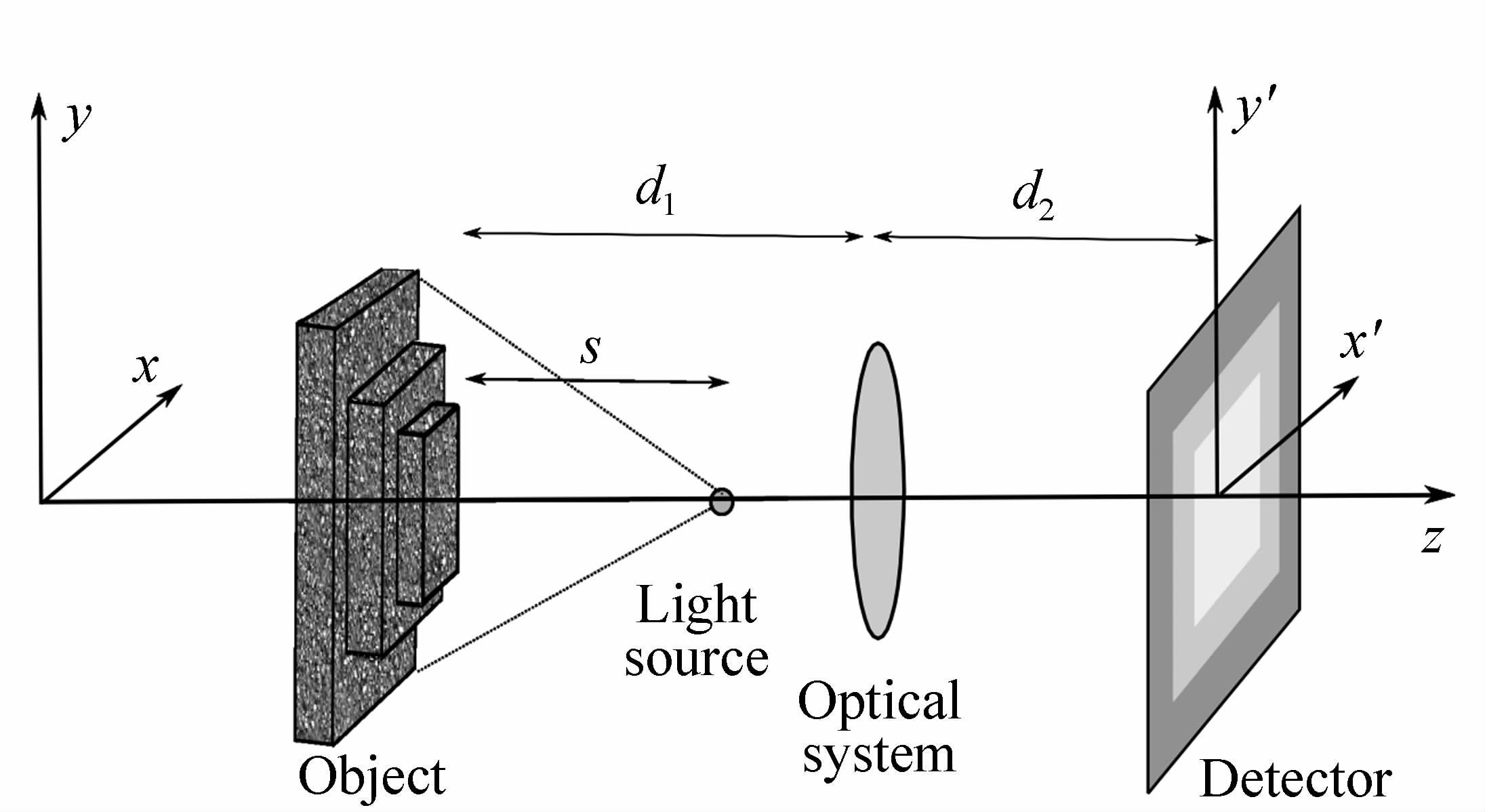
Figure 3. Scheme for simulation of the shape from focus method. The pyramidal object is placed at the distance d1 from the optical system. The image of the object produced by the optical system is observed at the distance d2 by means of the detector. Light source is situated at the distance s from the object

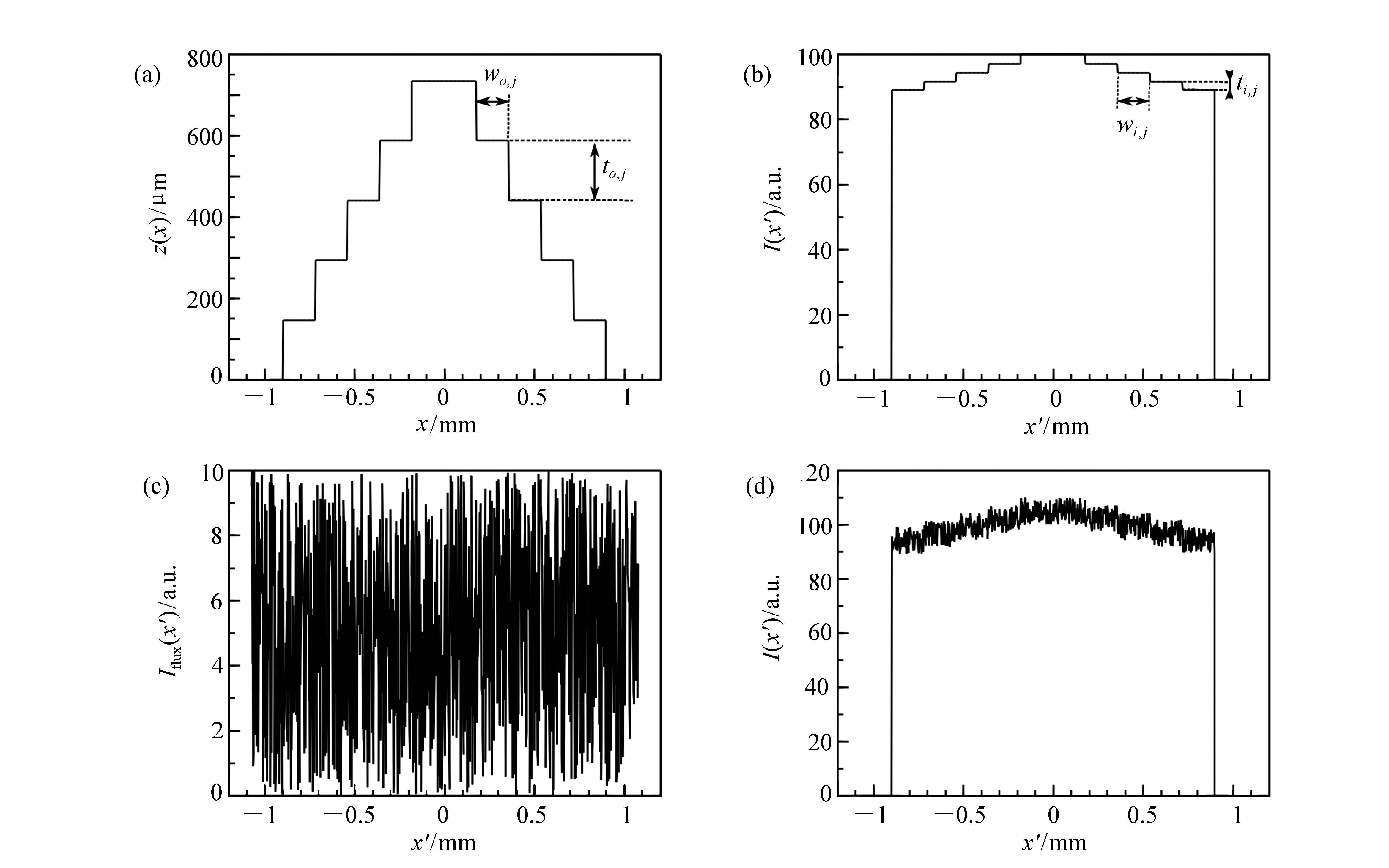
Figure 4. (a) A one-dimensional profile z (x) of the object under test and (d) a resulting intensity distribution I (x′) , computed by summation of (b) the intensity distribution I (x′) with (c) the fluctuation Ifluct (x′)

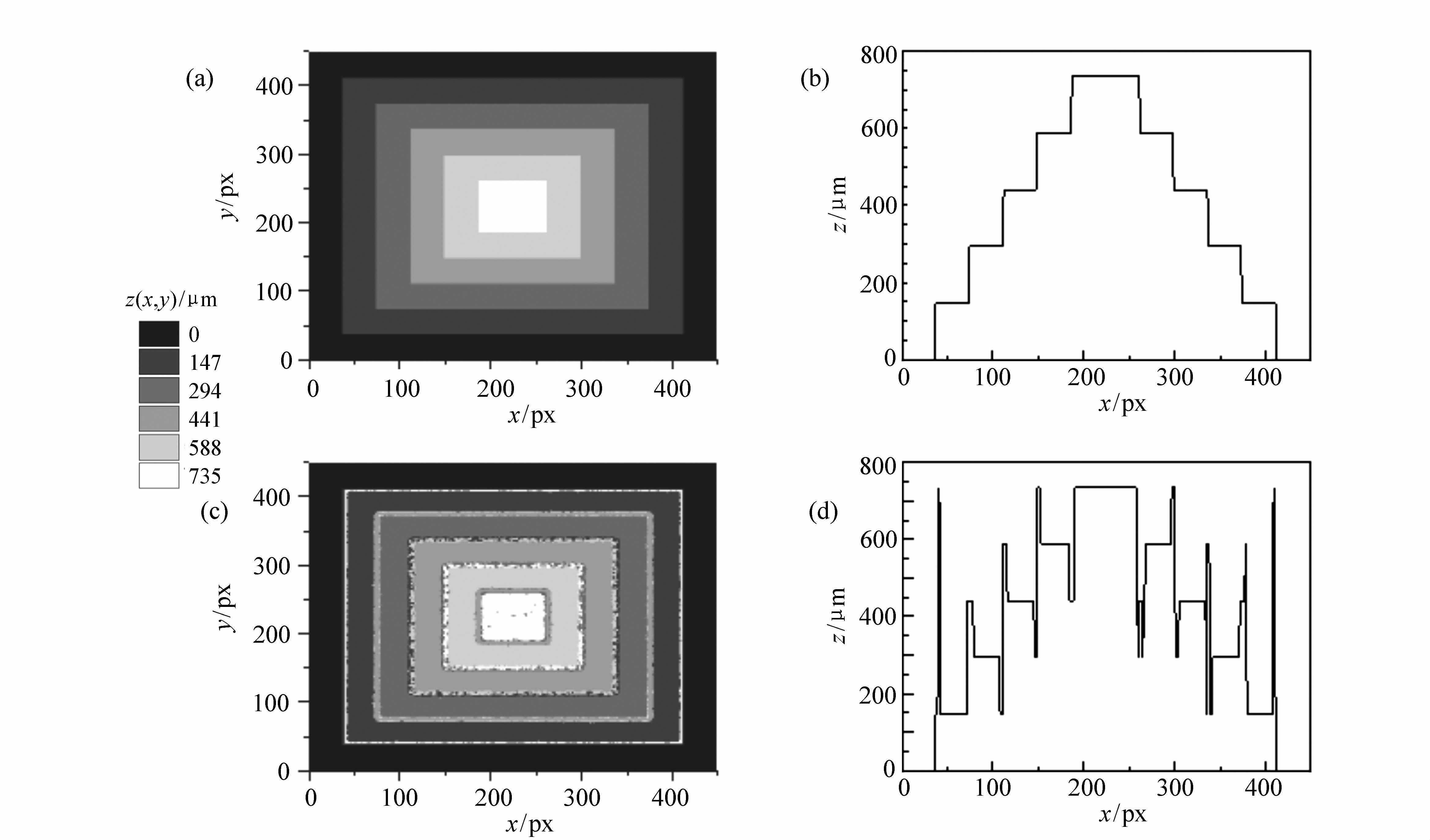
Figure 5. (a) An ideal case of the depth map z (x, y) (matrix of 451×451 pixels) of the object represented by the pyramid with 5 levels with total height 735 μm, and height of the individual level of the pyramid is 147 μm (b) a cross section of the depth map z (x, y) from (a) at a position y=225, (c) the depth map z (x, y) of the object acquired via simulation of the shape from focus method using the aberration-free optical system (d) a cross section of the depth map z (x, y) from (c) at a position y=225

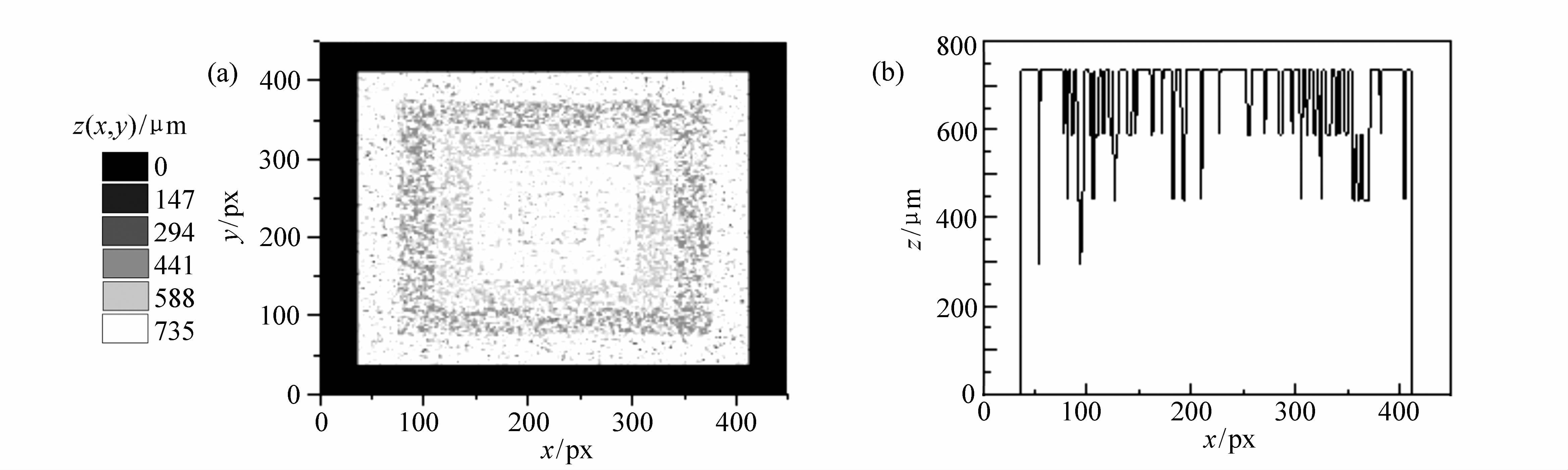
Figure 6. (a) A depth map z (x, y) of the object under test acquired via simulation of the shape from focus method using the optical system with chromatic aberration (b) a cross section of the depth map z (x, y) at a position y=225

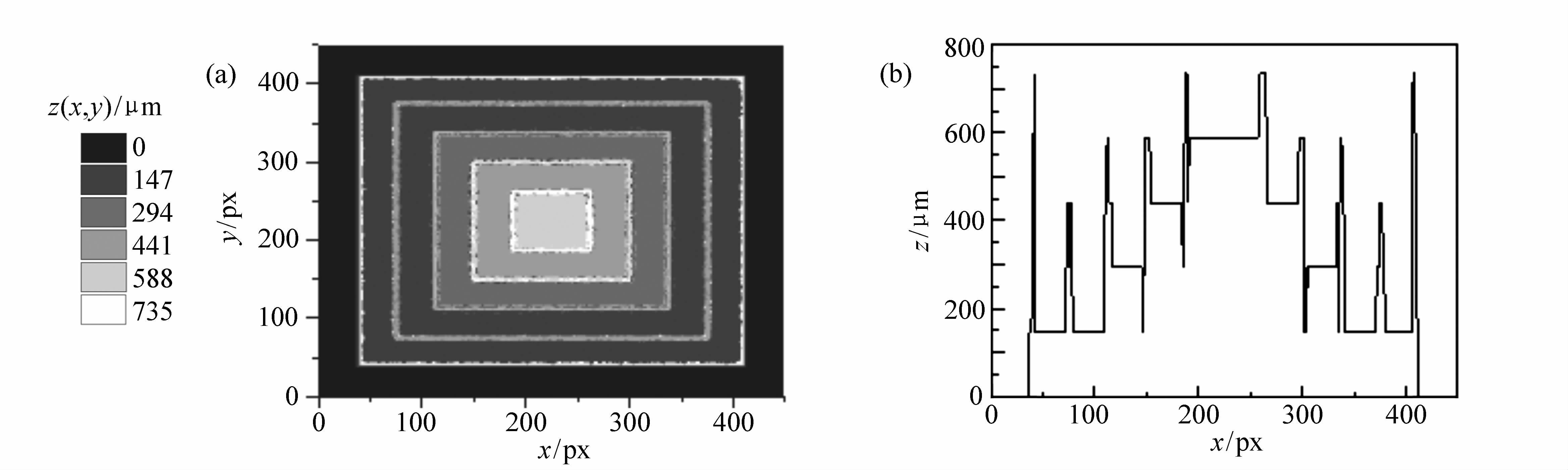
Figure 7. (a) A depth map z (x, y) of the object under test acquired via simulation of the shape from focus method using the achromatic optical system (b) a cross section of the depth map z (x, y) at a position y=225

Figure 8. Sum of modified Laplacian function F (i, j) computed by Eq. (14) for i=225, j=125 (the point on the third level of the pyramidal object) as a function of d1 for aberration-free (ideal) optical system, optical system with chromatic aberration and achromatic optical system. The total object height is 735 μm

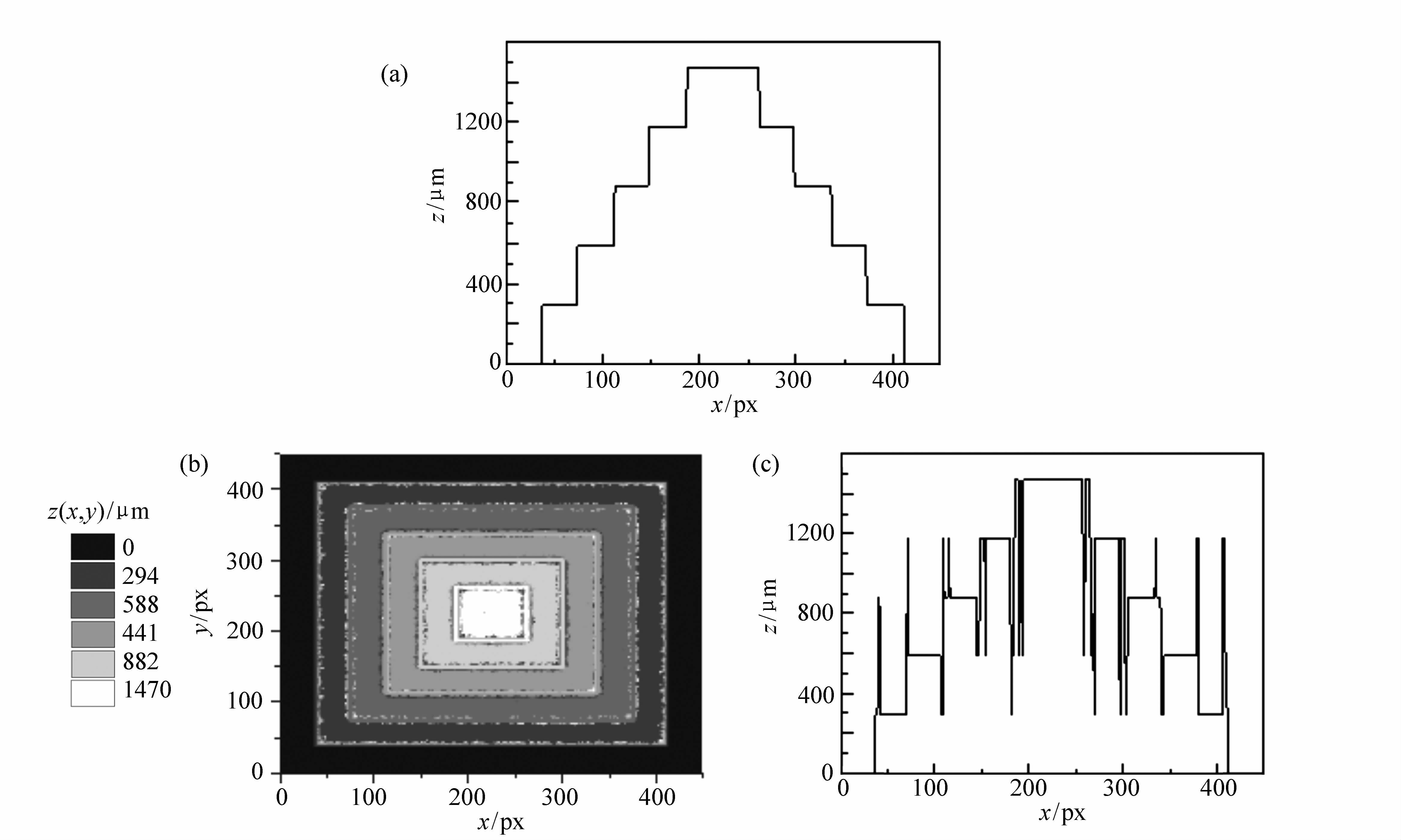
Figure 9. (a) A one-dimensional profile z (x) of the object under test, (b) a depth map z (x, y) of the object under test acquired via simulation of the shape from focus method using the achromatic optical system (c) a cross section of the depth map z (x, y) at a position y=225. The total object′s height is 1470 μm
-
[1] NAYAR S K,NAKAGAWA Y. Shape from focus[J]. IEEE,1994,16 (8) :824-831. [2] PERTUZ S,PUIG D,GARCIA M A. Reliability measure for shape from focus[J]. Image Vis. Comput.,2013,31 (10) :725-734. [3] MAHMOOD M T,SHIM S,CHOI T S. Depth and image focus enhancement for digital cameras[C]. IEEE 15th International Symposium on Consumer Electronics,Singapore,2011:50-53. [4] PERTUZ S,PUIG D,GARCIA M A. Analysis of focus measure operators for shape from focus[J]. Pattern Recognit.,2013,46 (5) :1415-1432. [5] SUBBARAO M. Direct recovery of depth-map I:differential methods[C]. IEEE Computer Society Workshop on Computer Vision,Miami Beach,Florida,USA,1987:58-65. [6] RAVIKUMAR S,THIBOS L N,BRADLEY A. Calculation of retinal image quality for polychromatic light[J]. J. Opt Soc. Am. A,2008,25 (10) :2395-2407. [7] CLAXTON C D,STAUNTON R C. Measurement of the point-spread function of a noisy imaging system[J]. J. Opt. Soc. Am. A,2008,25 (1) :159-170. [8] TAKEDA M. Chromatic aberration matching of the polychromatic optical transfer function[J]. Appl. Opt.,1981,20 (4) :684-687. [9] MANDAL S. A novel technique for evaluating the polychromatic optical transfer function of defocused optical imaging systems[J]. Optik,2013,124 (17) :2627-2629. [10] BARNDEN R. Calculation of axial polychromatic optical transfer function[J]. Opt. Acta,1974,21 (12) :981-1003. [11] SUBBARAO M,LU M-C. Computer modeling and simulation of camera defocus[C]. Conference on Optics, Illumination, and Image Sensing for Machine Vision VII, Boston, Massachusetts,USA,1992,Proc. SPIE,1993,1822:110-120. [12] MOELLER M,BENNING M,SCHÖNLIEB C,CREMERS D. Variational Depth from Focus Reconstruction[J]. IEEE,2015,24 (12) :5369-5378. [13] SALEH B E A,TEICH M C. Fundamentals of Photonics[M]. New York:John Wiley & Sons,1991. [14] GOODMAN J W. Introduction to Fourier Optics[M]. New York:McGraw-Hill Book Co.,1968. [15] ATIF M. Optimal depth estimation and extended depth of field from single images by computational imaging using chromatic aberrations[D]. Heidelberg:Ruperto Carola Heidelberg University,2013. [16] HADJ S B,BLANC-FÉRAUD L. Modeling and removing depth variant blur in 3D fluorescence microscopy[C]. IEEE International Conference on Acoustics,Speech and Signal Processing,Kyoto,Japan,2012:689-692. [17] BARSKY B A,TOBIAS M J,CHU D-P,et al.. Elimination of artifacts due to occlusion and discretization problems in image space blurring techniques[J]. Graph. Models,2005,67 (6) :584-599. [18] ZHANG L,NAYAR S. Projection defocus analysis for scene capture and image display[J]. ACM Trans. Graph.,2006,25 (3) :907-915. [19] FURLAN W D,SAAVEDRA G,SILVESTRE E,et al.. Polychromatic axial behavior of aberrated optical systems:Wigner distribution function approach[J]. Appl. Opt.,1997,36 (35) :9146-9151. [20] CMOS Camera DCC1545M[EB/OL]. [2016-01-07].http://www.thorlabs.de/newgrouppage9.cfm?objectgroup_id=4024/. [21] Relative spectral power distribution of CIE Standard Illuminant D65[EB/OL]. [2016-01-07].http://files.cie.co.at/204.xls/. [22] Dispersion formula of glass N-BK7[EB/OL]. [2016-01-07].http://refractiveindex.info/?shelf=glass &book=BK7 & page=SCHOTT. [23] Mounted Achromatic Doublet AC127-075-A-ML[EB/OL]. [2016-01-07]. https://www.thorlabs.de/newgrouppage9.cfm?objectgroup_id=2696. [24] MADOU M J. Manufacturing Techniques for Microfabrication and Nanotechnology[M]. Boca Raton,Florida:CRC Press-Taylor & Francis Group,2011. -

 下载:
下载:




计量
- 文章访问数: 1989
- HTML全文浏览量: 440
- PDF下载量: 863
- 被引次数: 0
