2016年 9卷 第4期
2016, 9(4): 397-404.
doi: 10.3788/CO.20160904.0397
 摘要
摘要 HTML全文
HTML全文 PDF 2158KB
PDF 2158KB
摘要:
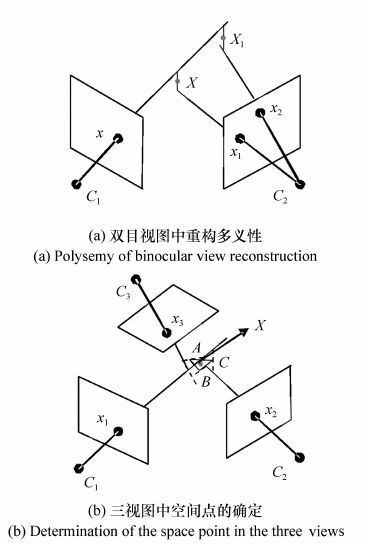
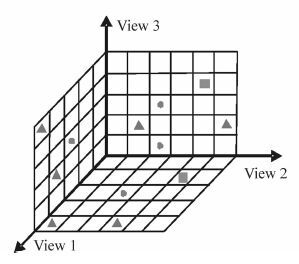
本文基于三坐标测量机(CMM)设计了一套视觉检测系统,该系统能够对零件实际空间特征信息进行比较全面地提取。针对位于CMM平台上带有角点的零件,利用Harris算子提取从CMM三个不同方位获取的零件图像的角点。对于Harris算子提取到的角点,本文提出一种八链码搜索法和SUSAN区域法相结合的伪角点剔除方法,最后基于立体视觉的原理,提出“距离空间图”匹配算法,将以上3幅图像一一建立匹配关系。实验中多次改变零件在CMM中姿态时,多次实验数据表明本文的角点提取精度与真实角点间仅存在1~2像素的偏差,零件的定位误差为1~3mm。通过实验验证,角点匹配和定位的稳定性和精度满足要求,具有一定的抗干扰性和实用性。
本文基于三坐标测量机(CMM)设计了一套视觉检测系统,该系统能够对零件实际空间特征信息进行比较全面地提取。针对位于CMM平台上带有角点的零件,利用Harris算子提取从CMM三个不同方位获取的零件图像的角点。对于Harris算子提取到的角点,本文提出一种八链码搜索法和SUSAN区域法相结合的伪角点剔除方法,最后基于立体视觉的原理,提出“距离空间图”匹配算法,将以上3幅图像一一建立匹配关系。实验中多次改变零件在CMM中姿态时,多次实验数据表明本文的角点提取精度与真实角点间仅存在1~2像素的偏差,零件的定位误差为1~3mm。通过实验验证,角点匹配和定位的稳定性和精度满足要求,具有一定的抗干扰性和实用性。





2016, 9(4): 405-414.
doi: 10.3788/CO.20160904.0405
摘要:
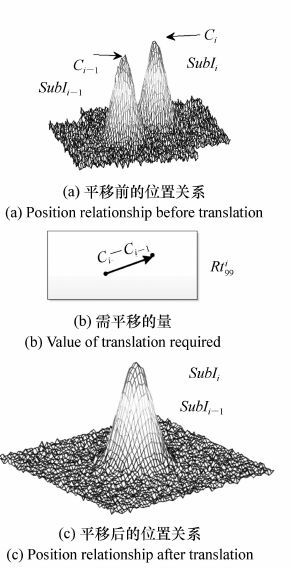
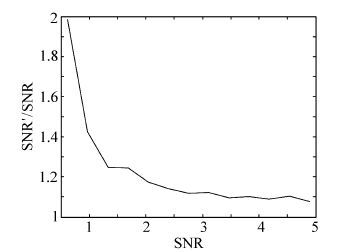
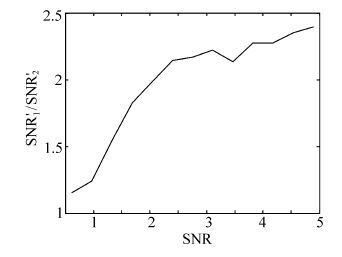
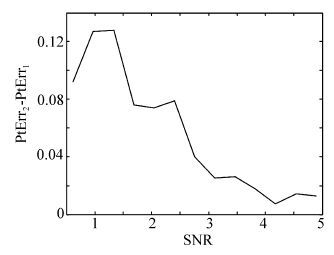
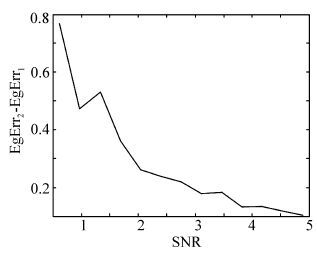
为实现白天红外光电测量系统对低信噪比恒星的质心及能量高精度计算,本文给出一种高效的方法。首先,分析了红外光学系统白天恒星的成像特征。其次,先对采集的图像序列进行预处理操作得到预处理图像。接着对预处理图像序列执行叠加求均值和下采样操作得到下采样图像。在下采样图像中以亮度为特征求取恒星的疑似位置后,在预处理图像序列上建立与疑似位置相对应的目标区域,在目标区域内顺序求取质心序列。对目标区域的图像序列以质心偏移为基础进行移位相加后获取目标图像。在目标图像上以信噪比为判据完成恒星提取,以及质心和能量的计算。再次,分析指出此方法能增强目标信噪比的原理,并给出其适用范围以及相关参数的确定方法。最后通过实验表明,采用移位相加法可增强目标的信噪比,并提高提取正确率;且对于SNR不大于4.8的恒星可将其质心和能量计算精度平均提高0.06 pixel和28.5%。移位相加法对低信噪比的恒星可较为精确地计算其质心和能量。
为实现白天红外光电测量系统对低信噪比恒星的质心及能量高精度计算,本文给出一种高效的方法。首先,分析了红外光学系统白天恒星的成像特征。其次,先对采集的图像序列进行预处理操作得到预处理图像。接着对预处理图像序列执行叠加求均值和下采样操作得到下采样图像。在下采样图像中以亮度为特征求取恒星的疑似位置后,在预处理图像序列上建立与疑似位置相对应的目标区域,在目标区域内顺序求取质心序列。对目标区域的图像序列以质心偏移为基础进行移位相加后获取目标图像。在目标图像上以信噪比为判据完成恒星提取,以及质心和能量的计算。再次,分析指出此方法能增强目标信噪比的原理,并给出其适用范围以及相关参数的确定方法。最后通过实验表明,采用移位相加法可增强目标的信噪比,并提高提取正确率;且对于SNR不大于4.8的恒星可将其质心和能量计算精度平均提高0.06 pixel和28.5%。移位相加法对低信噪比的恒星可较为精确地计算其质心和能量。

2016, 9(4): 415-422.
doi: 10.3788/CO.20160904.0415
摘要:
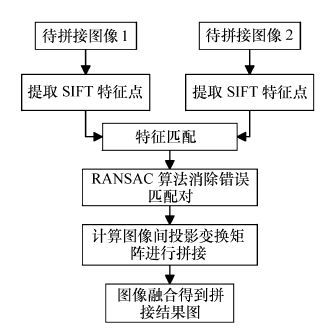
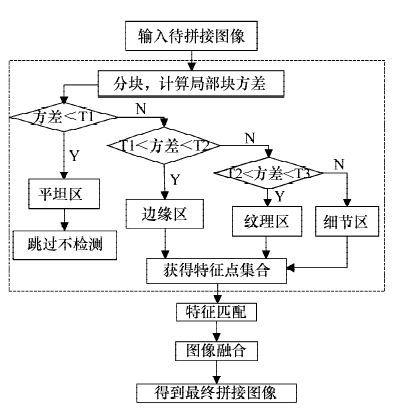
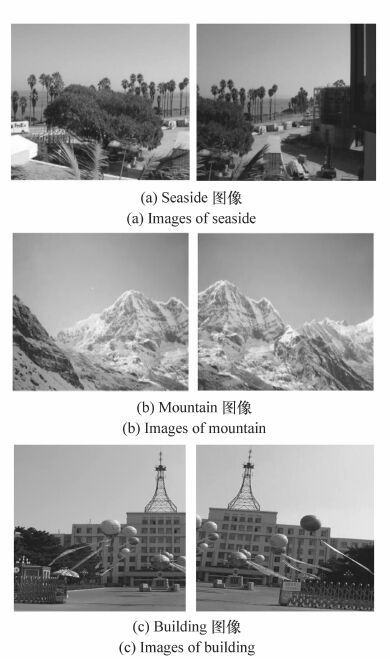
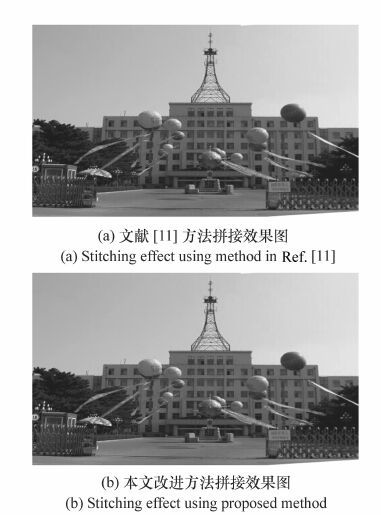
针对目前图像拼接中计算量较大、实时性较差的问题,本文提出了一种图像局部特征自适应的快速尺度不变特征变换(SIFT)拼接方法。首先,对待拼接图像分块,确定图像局部块的特征类型;接着自适应采用不同的简化方法提取各局部块的特征点。然后,通过特征匹配求出变换矩阵,并结合RANSAC算法去除伪匹配对。最后,通过图像融合得到最终的拼接图像。文中使用提出的方法对3组待拼接图像进行实验。从实验结果可以看出:与标准拼接方法相比,本文改进方法的计算速度提升了30%~45%。因此,这种方法能够在保证图像拼接质量的前提下,有效提高图像拼接的效率,克服图像拼接中计算复杂度高的问题,在实际图像拼接中具有一定的应用价值。
针对目前图像拼接中计算量较大、实时性较差的问题,本文提出了一种图像局部特征自适应的快速尺度不变特征变换(SIFT)拼接方法。首先,对待拼接图像分块,确定图像局部块的特征类型;接着自适应采用不同的简化方法提取各局部块的特征点。然后,通过特征匹配求出变换矩阵,并结合RANSAC算法去除伪匹配对。最后,通过图像融合得到最终的拼接图像。文中使用提出的方法对3组待拼接图像进行实验。从实验结果可以看出:与标准拼接方法相比,本文改进方法的计算速度提升了30%~45%。因此,这种方法能够在保证图像拼接质量的前提下,有效提高图像拼接的效率,克服图像拼接中计算复杂度高的问题,在实际图像拼接中具有一定的应用价值。

2016, 9(4): 423-431.
doi: 10.3788/CO.20160904.0423
摘要:
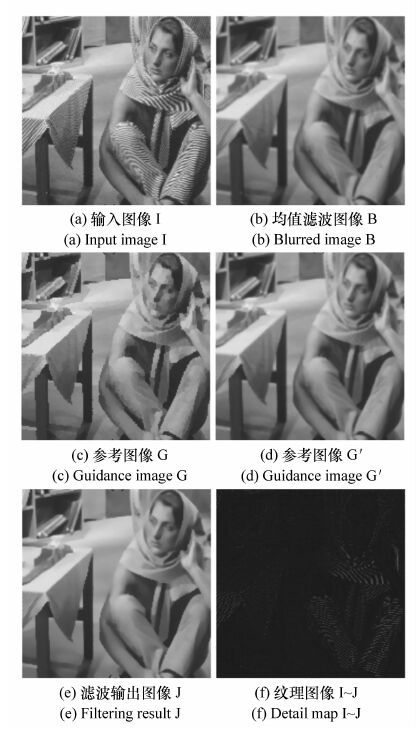
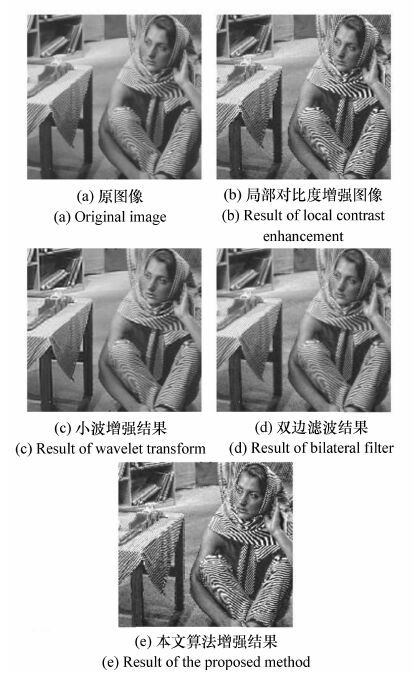
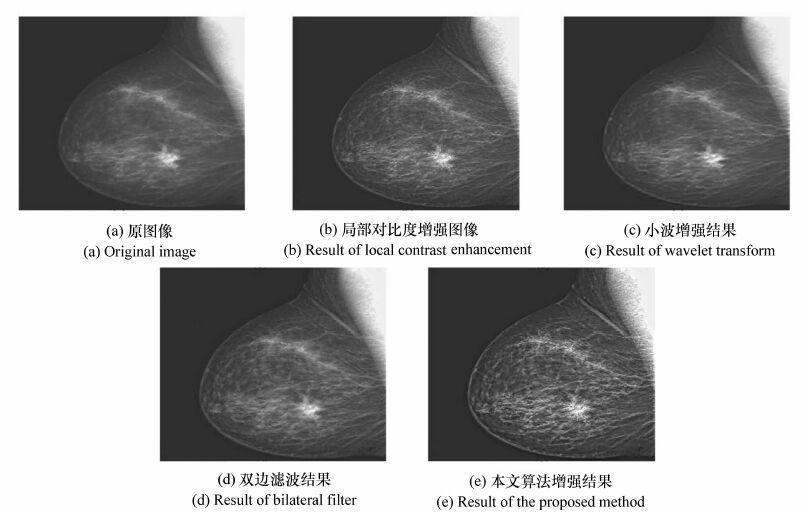
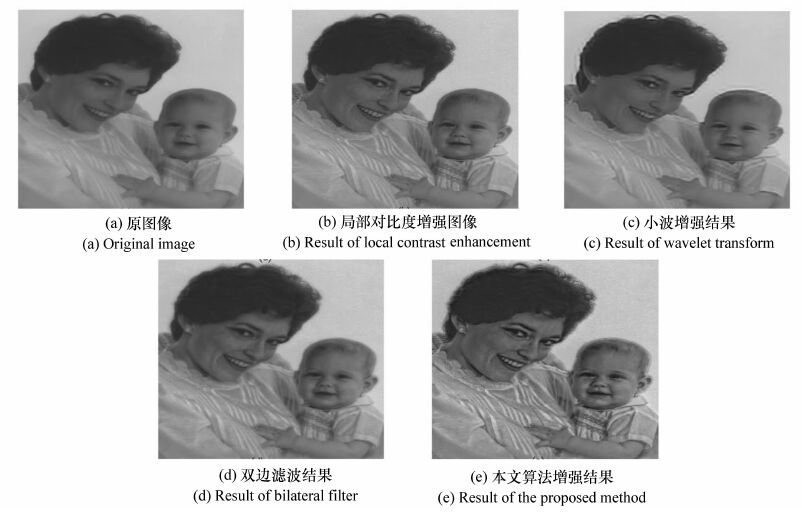
为了实现图像的细节增强,特别是纹理细节增强,同时尽可能保持图像的结构完整,提出了一种基于双边纹理滤波的图像多尺度分解方法。首先,对图像进行多尺度双边纹理滤波分解,分别得到一幅基本图像和一系列细节纹理图像。接着,类似于小波增强方法,对细节图像采用多尺度自适应增强方法,得到一系列增强后的纹理细节图像。最后,将基本图像和增强后细节图像相加,重构出最后的增强图像。实验结果表明:本文提出的增强方法能够在突出边缘的同时,较好地增强图像中的纹理细节信息。将基于双边纹理滤波的多尺度分解引入图像增强,能更好地体现图像纹理细节特征,为增强图像提供更加丰富的信息。
为了实现图像的细节增强,特别是纹理细节增强,同时尽可能保持图像的结构完整,提出了一种基于双边纹理滤波的图像多尺度分解方法。首先,对图像进行多尺度双边纹理滤波分解,分别得到一幅基本图像和一系列细节纹理图像。接着,类似于小波增强方法,对细节图像采用多尺度自适应增强方法,得到一系列增强后的纹理细节图像。最后,将基本图像和增强后细节图像相加,重构出最后的增强图像。实验结果表明:本文提出的增强方法能够在突出边缘的同时,较好地增强图像中的纹理细节信息。将基于双边纹理滤波的多尺度分解引入图像增强,能更好地体现图像纹理细节特征,为增强图像提供更加丰富的信息。



2016, 9(4): 432-438.
doi: 10.3788/CO.20160904.0432
摘要:
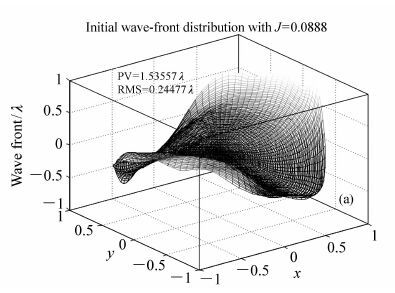
对随机并行梯度下降算法(SPGD)性能与不同变形镜排布规律的关系进行了研究。以采用Roddier方法生成的由52项Zernike像差构成的畸变波前为整形对象,对SPGD算法的收敛速率和整形效果与变形镜排布规律(单元数分别为19、21、32、37、45、60、61、77、91)之间的关系进行了仿真研究。结果表明:从整体分析,随着变形镜单元数逐渐增多,SPGD算法的收敛速率和整形效果均逐渐变差;从局部分析,由于变形镜元胞类型变化和边缘占空比的影响,在渐变规律中产生了局部差异。
对随机并行梯度下降算法(SPGD)性能与不同变形镜排布规律的关系进行了研究。以采用Roddier方法生成的由52项Zernike像差构成的畸变波前为整形对象,对SPGD算法的收敛速率和整形效果与变形镜排布规律(单元数分别为19、21、32、37、45、60、61、77、91)之间的关系进行了仿真研究。结果表明:从整体分析,随着变形镜单元数逐渐增多,SPGD算法的收敛速率和整形效果均逐渐变差;从局部分析,由于变形镜元胞类型变化和边缘占空比的影响,在渐变规律中产生了局部差异。




2016, 9(4): 439-451.
doi: 10.3788/CO.20160904.0439
摘要:
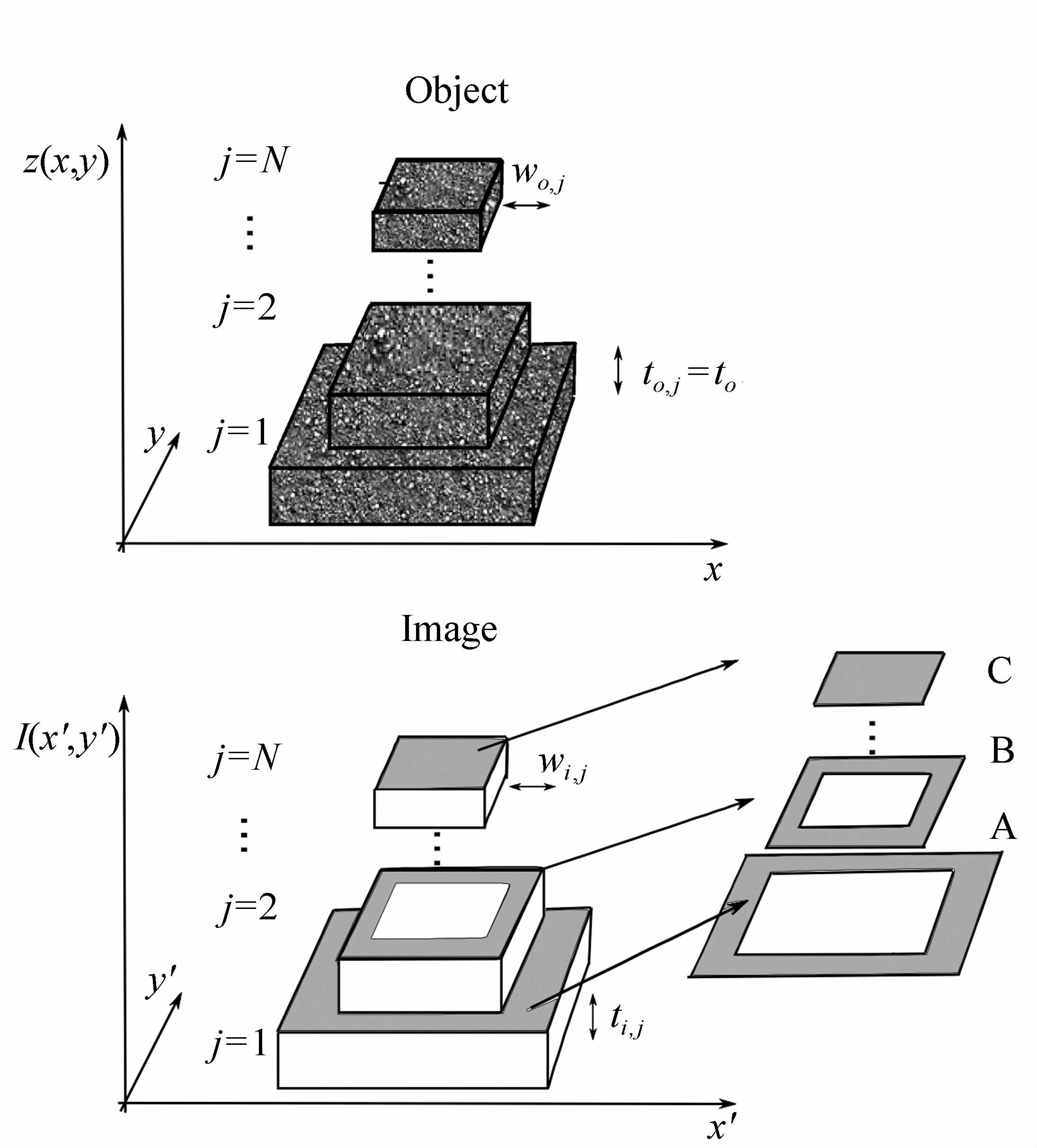
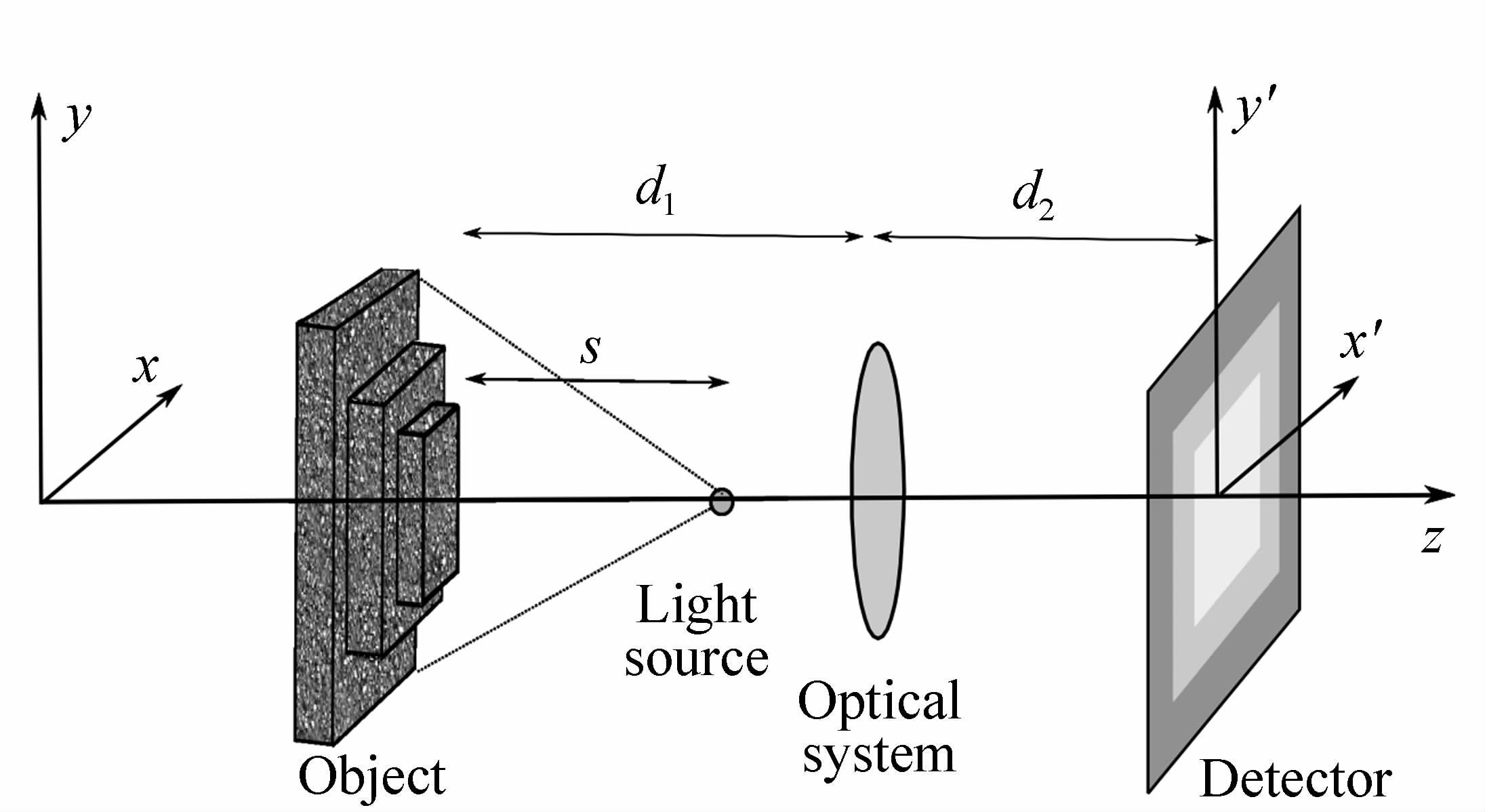
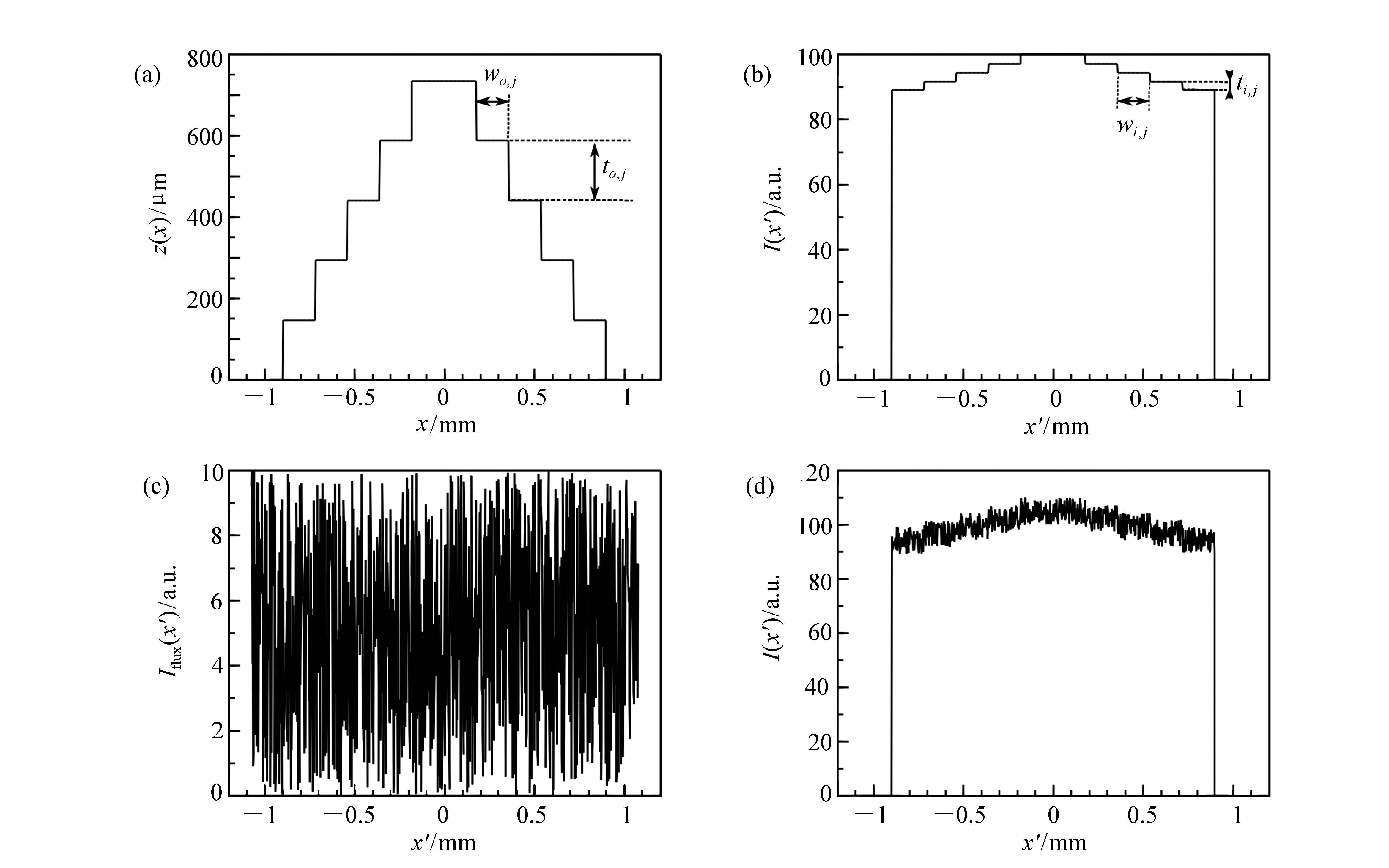
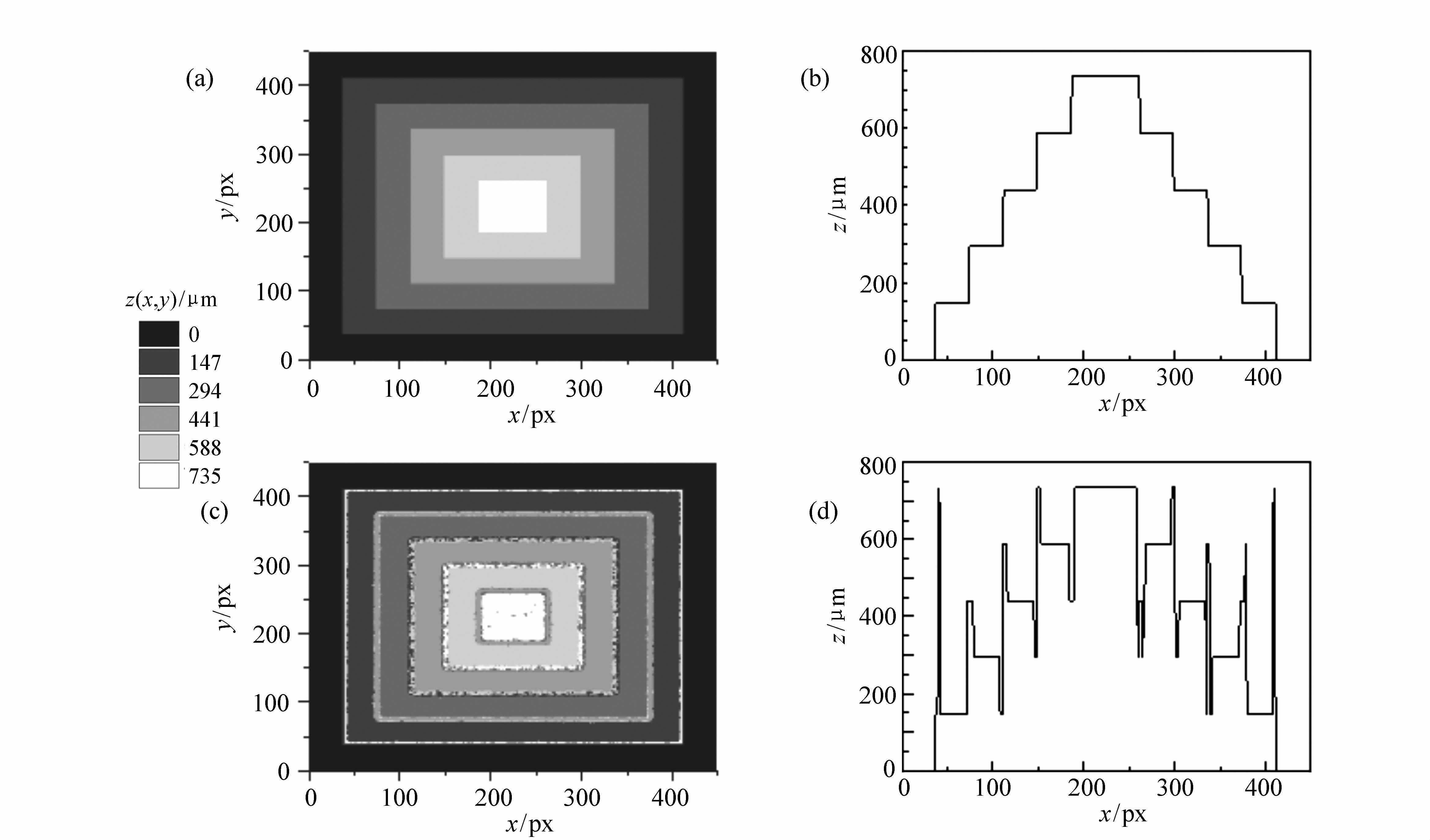
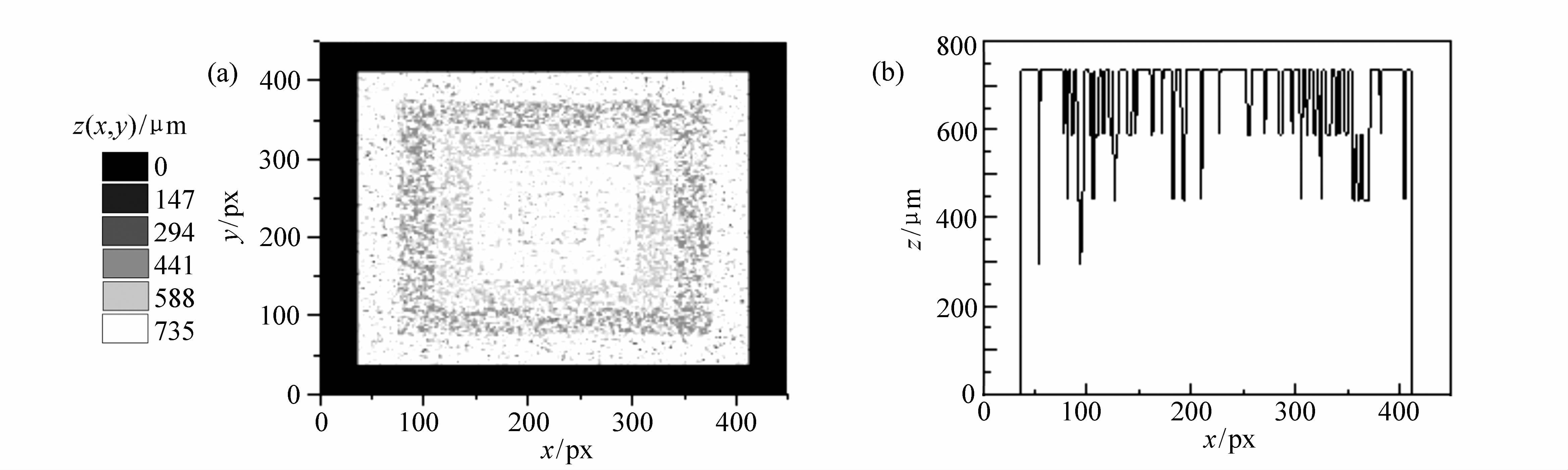
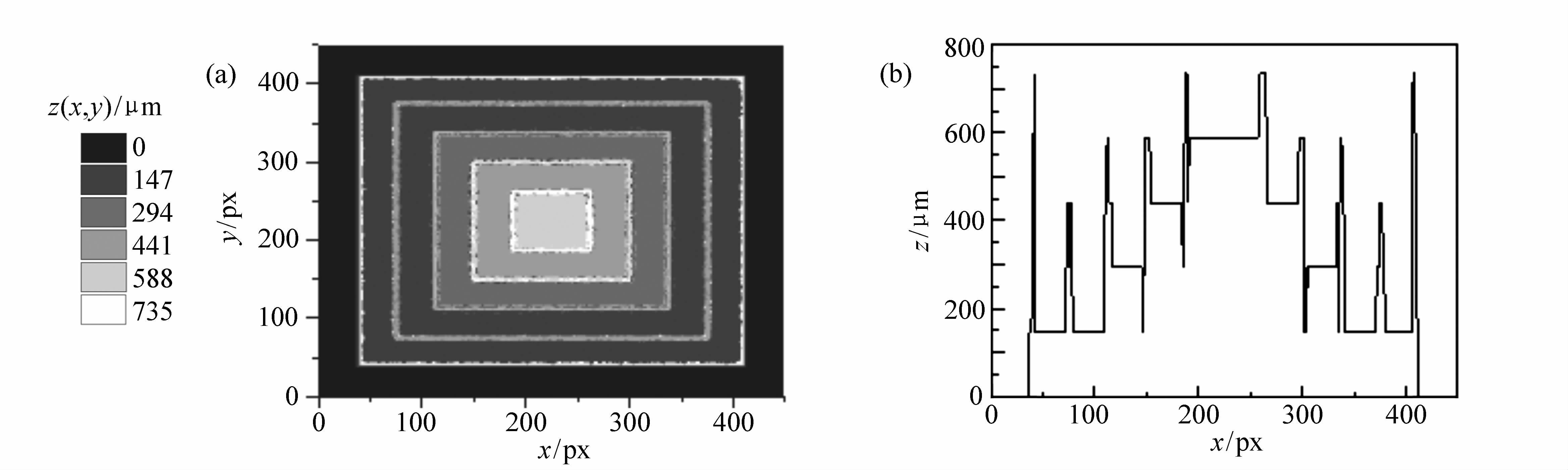
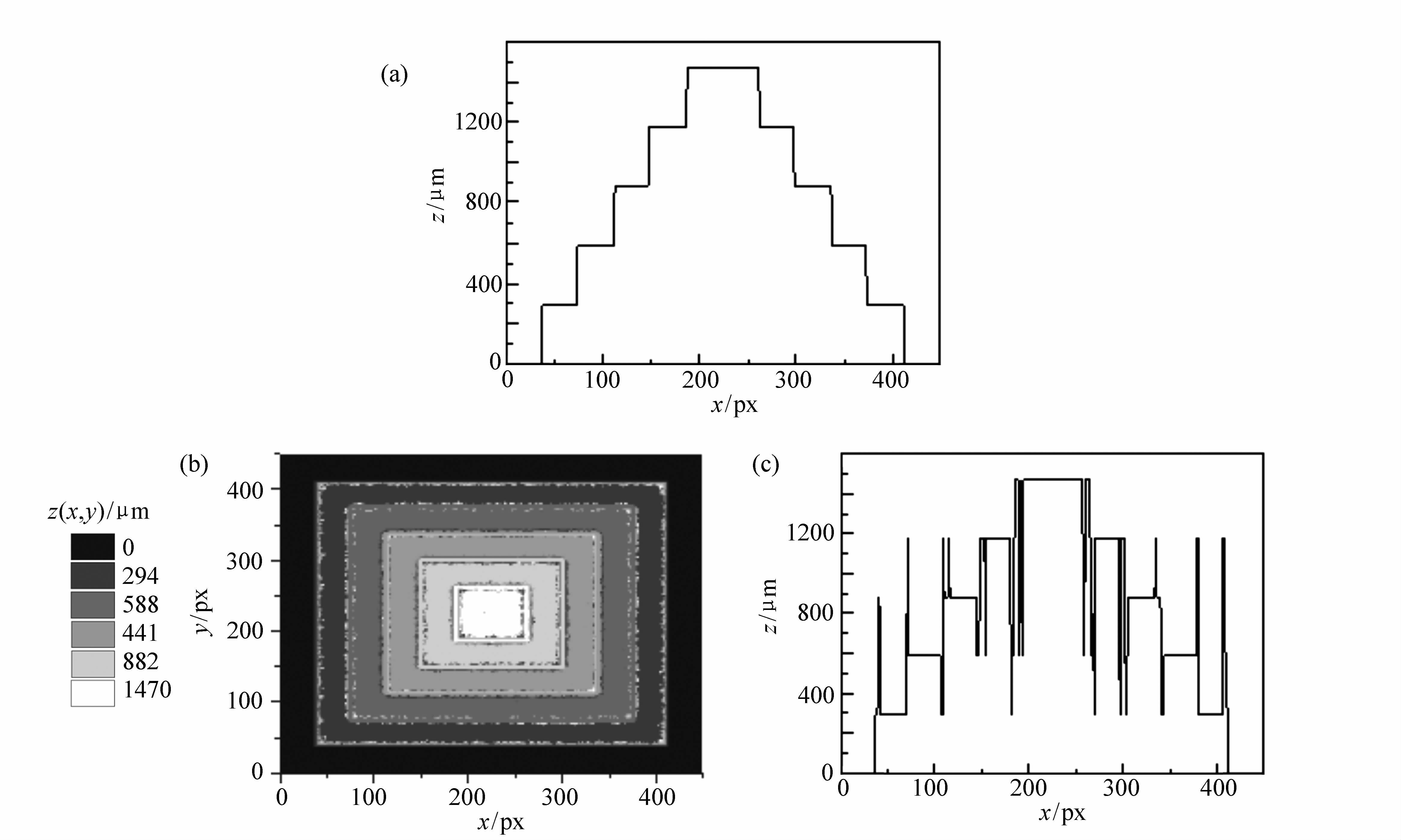
采用基于拉普拉斯算符聚焦形貌恢复方法,提出了模拟目标深度测量的数值模型。数值模拟的核心是基于通过几何光学预测的理想图像的卷积与透镜广义孔径函数的多色点扩散函数,即用聚焦误差替代抛物线圆柱形貌或高斯函数。该模型可以使用基于聚焦形貌恢复方法的传感器真实组件参数、光源光谱、光学系统离差、相机的光谱灵敏度。提出了光学系统离差(消球差、消色差、色差)对确定目标表面形貌的精确度和可靠性的影响。结果表明,该模型可以有效提高实验效率,缩短时滞,降低成本。
采用基于拉普拉斯算符聚焦形貌恢复方法,提出了模拟目标深度测量的数值模型。数值模拟的核心是基于通过几何光学预测的理想图像的卷积与透镜广义孔径函数的多色点扩散函数,即用聚焦误差替代抛物线圆柱形貌或高斯函数。该模型可以使用基于聚焦形貌恢复方法的传感器真实组件参数、光源光谱、光学系统离差、相机的光谱灵敏度。提出了光学系统离差(消球差、消色差、色差)对确定目标表面形貌的精确度和可靠性的影响。结果表明,该模型可以有效提高实验效率,缩短时滞,降低成本。



2016, 9(4): 452-462.
doi: 10.3788/CO.20160904.0452
摘要:
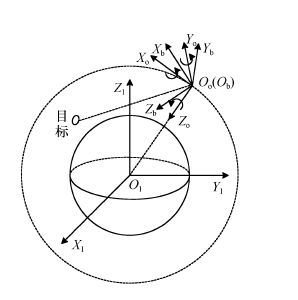
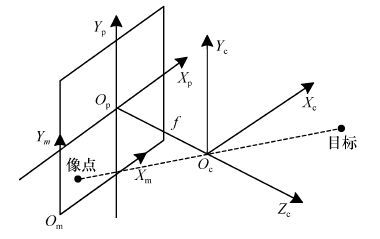
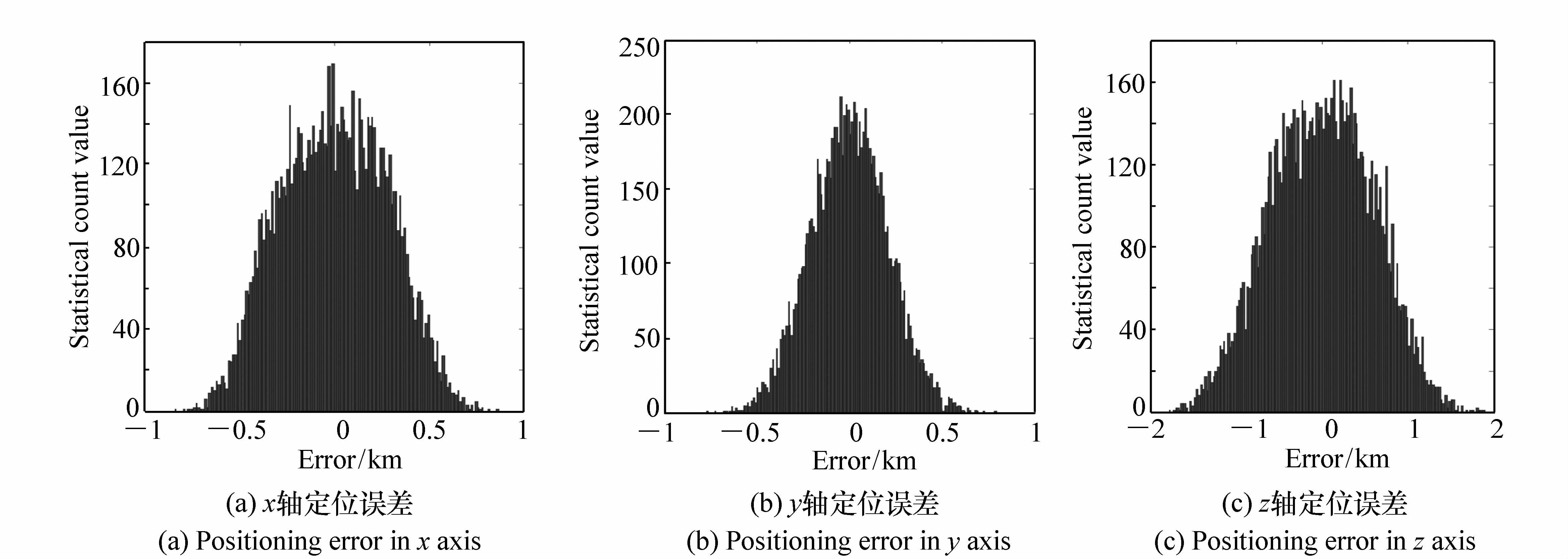
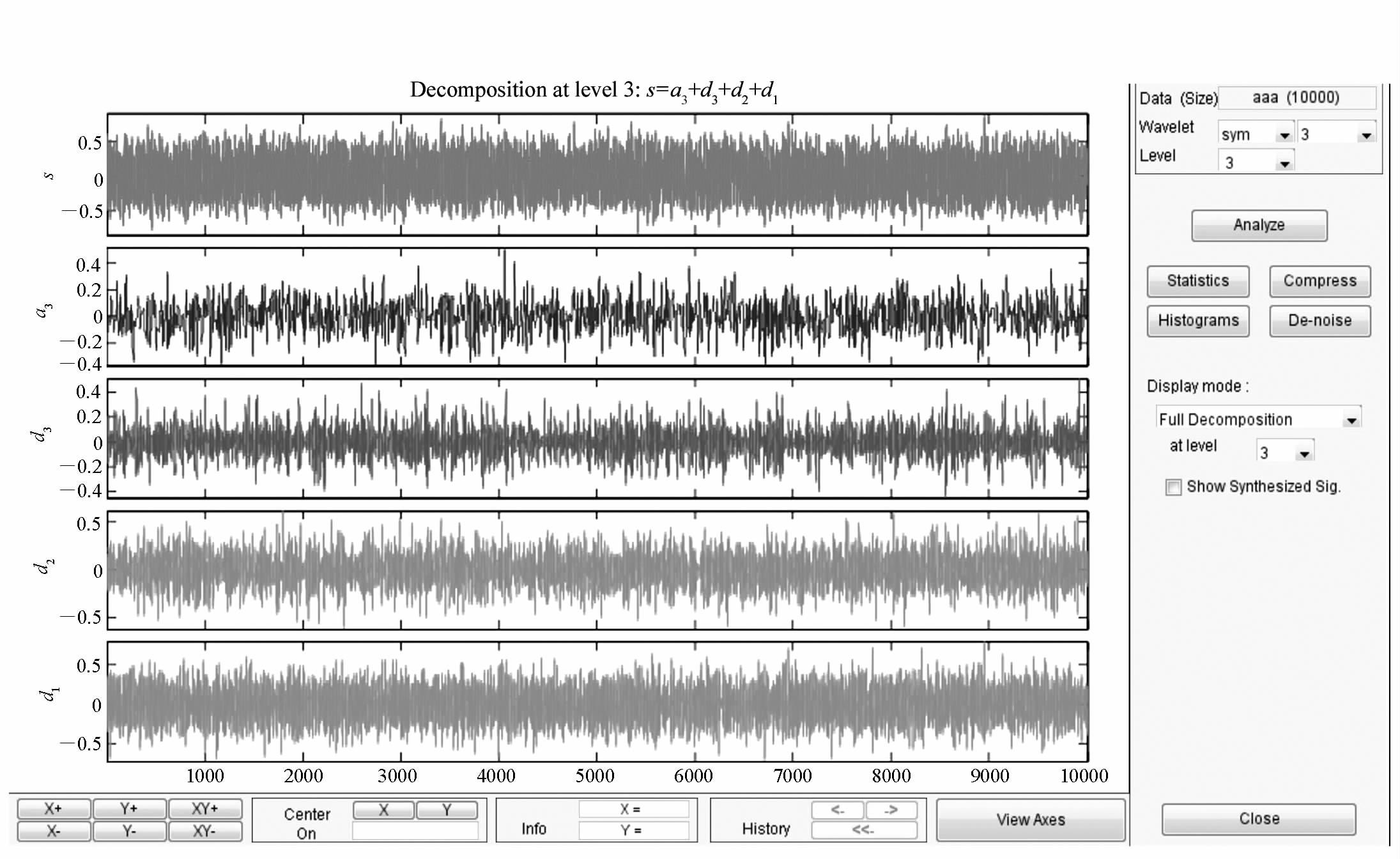
为提高双星光学观测体系的定位精度,构建了新型双星光学定位系统。通过对卫星、光电观测平台的建模,构建了地惯系下平台与目标间的观测矢量模型。利用几何定位算法,推导出了地惯系下的目标定位模型与定位误差模型,并利用蒙特卡罗法获得了定位误差分布。在此基础上,引入了小波理论进行误差的优化重构,以提高双星光学观测体系的定位精度。利用测量数据进行仿真,结果表明,引入小波理论对目标定位误差进行降噪重构后,可以使目标定位精度提高30%,为工程上减小目标定位误差提供了新的思路。
为提高双星光学观测体系的定位精度,构建了新型双星光学定位系统。通过对卫星、光电观测平台的建模,构建了地惯系下平台与目标间的观测矢量模型。利用几何定位算法,推导出了地惯系下的目标定位模型与定位误差模型,并利用蒙特卡罗法获得了定位误差分布。在此基础上,引入了小波理论进行误差的优化重构,以提高双星光学观测体系的定位精度。利用测量数据进行仿真,结果表明,引入小波理论对目标定位误差进行降噪重构后,可以使目标定位精度提高30%,为工程上减小目标定位误差提供了新的思路。





2016, 9(4): 463-471.
doi: 10.3788/CO.20160904.0463
摘要:
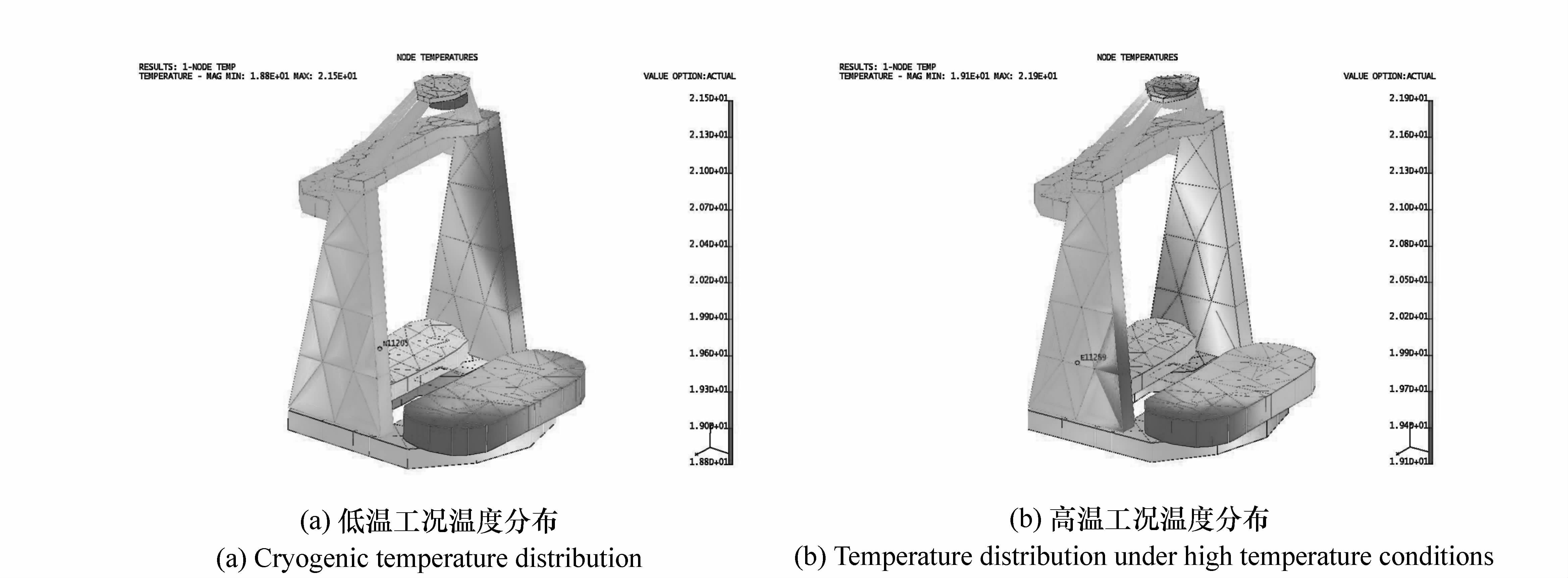
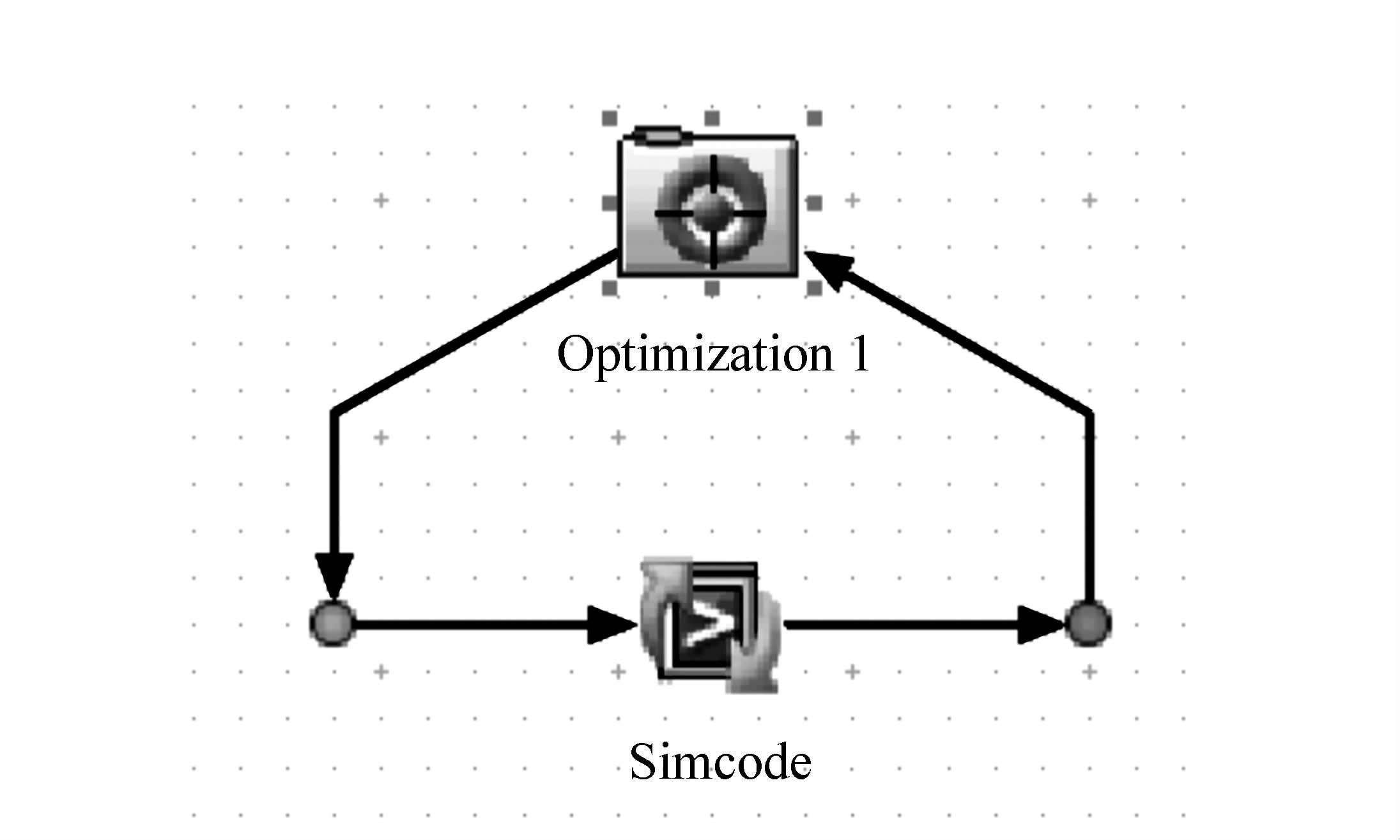
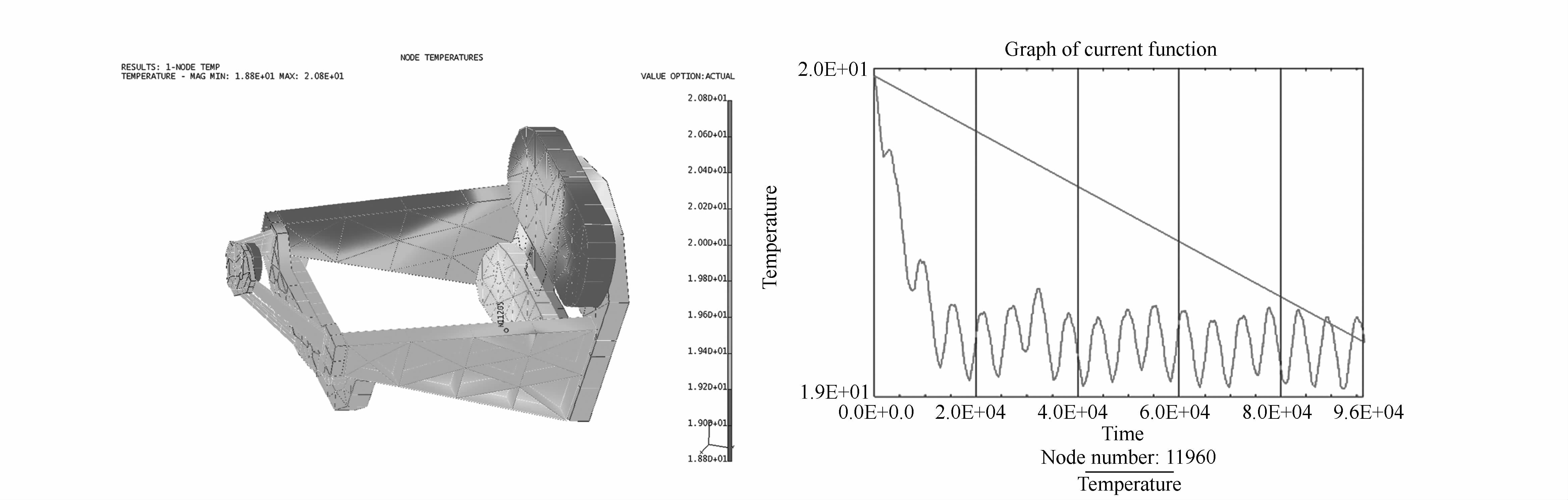
针对大口径、离轴、非对称结构的空间光学遥感器主动热控功率最小分配的难题,提出一种基于多目标遗传算法的功率优化方法。首先根据空间相机结构建立有限元模型。然后,凭借设计者的经验,根据相机结构特点及大致热分布规律,初步划分热控区域,规划设计变量和目标变量。之后,将设计变量和目标变量代入多目标遗传算法求出Pareto最优解集。最后,在最优解集中选出合适的功率分配代入到仿真模型中进行计算,得到优化后的功率分配及温度场。对某离轴三反空间相机进行了功率优化和地面热平衡试验。经TMG仿真计算,优化后整机波动范围在低温工况和高温工况分别降低了4.76%和35.7%,并且总功耗降低了6.85%。经地面热平衡试验表明,整机温度场温差控制在±0.5℃以内,满足±2℃的指标要求。
针对大口径、离轴、非对称结构的空间光学遥感器主动热控功率最小分配的难题,提出一种基于多目标遗传算法的功率优化方法。首先根据空间相机结构建立有限元模型。然后,凭借设计者的经验,根据相机结构特点及大致热分布规律,初步划分热控区域,规划设计变量和目标变量。之后,将设计变量和目标变量代入多目标遗传算法求出Pareto最优解集。最后,在最优解集中选出合适的功率分配代入到仿真模型中进行计算,得到优化后的功率分配及温度场。对某离轴三反空间相机进行了功率优化和地面热平衡试验。经TMG仿真计算,优化后整机波动范围在低温工况和高温工况分别降低了4.76%和35.7%,并且总功耗降低了6.85%。经地面热平衡试验表明,整机温度场温差控制在±0.5℃以内,满足±2℃的指标要求。






2016, 9(4): 472-482.
doi: 10.3788/CO.20160904.0472
摘要:
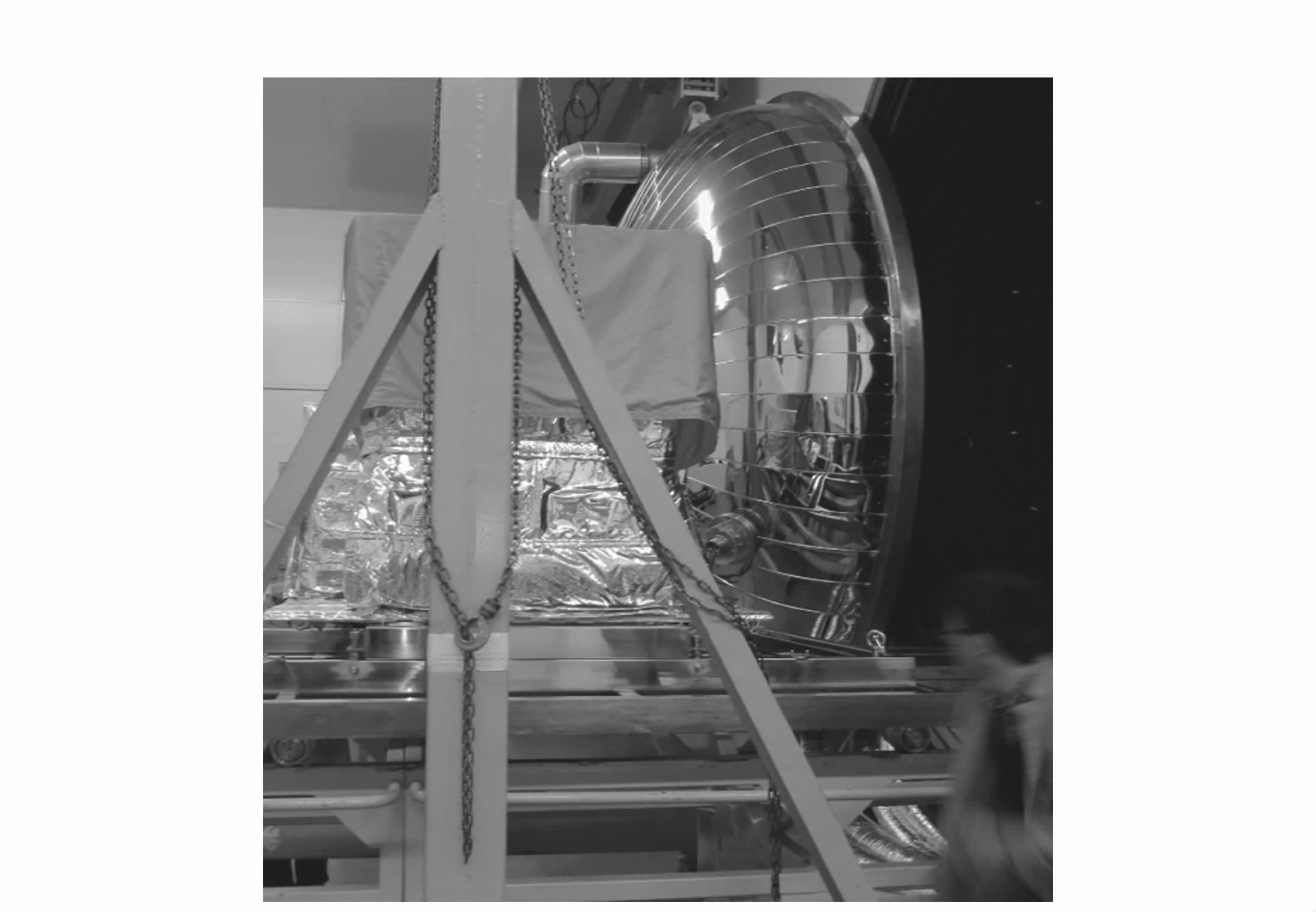
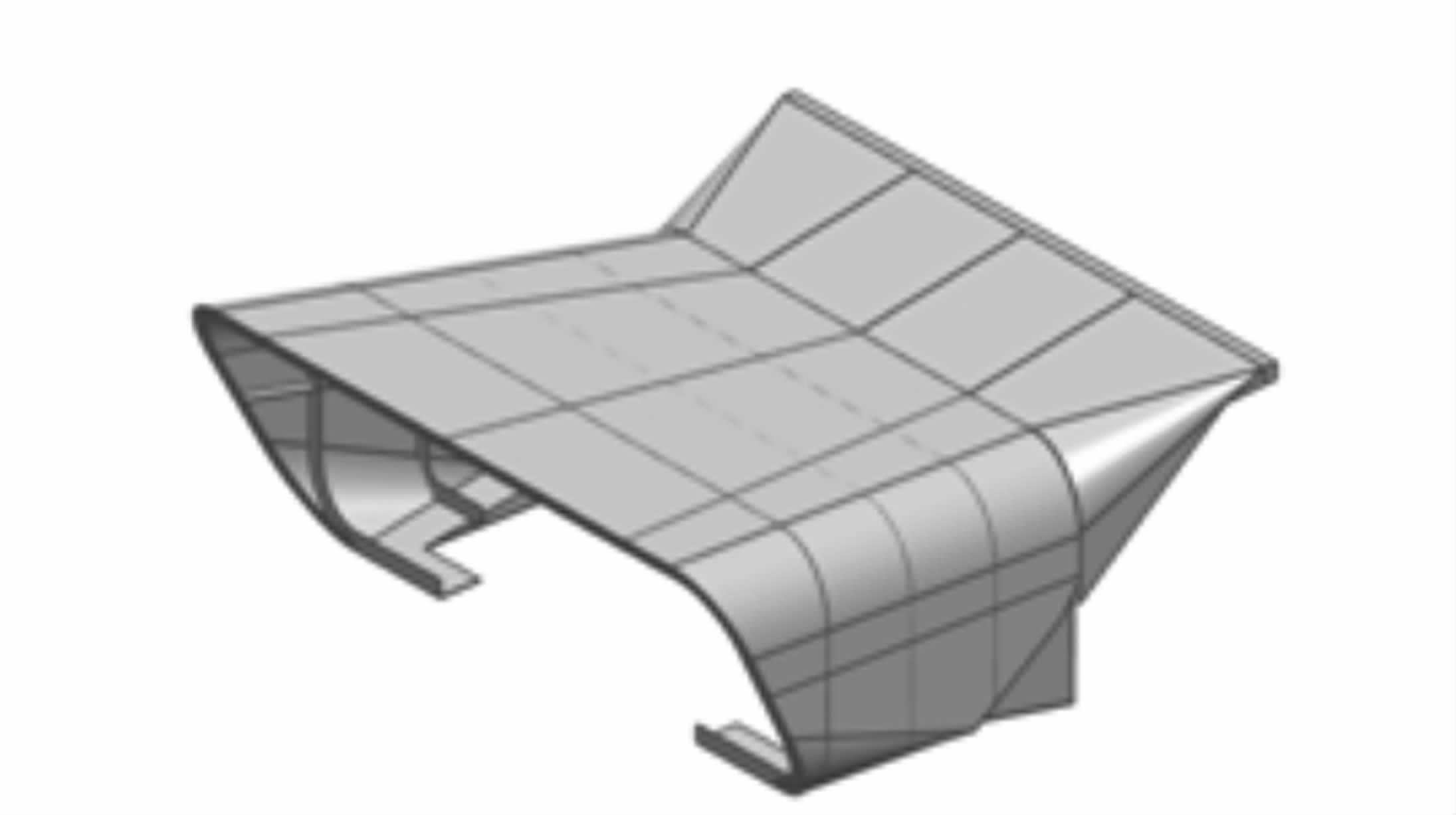
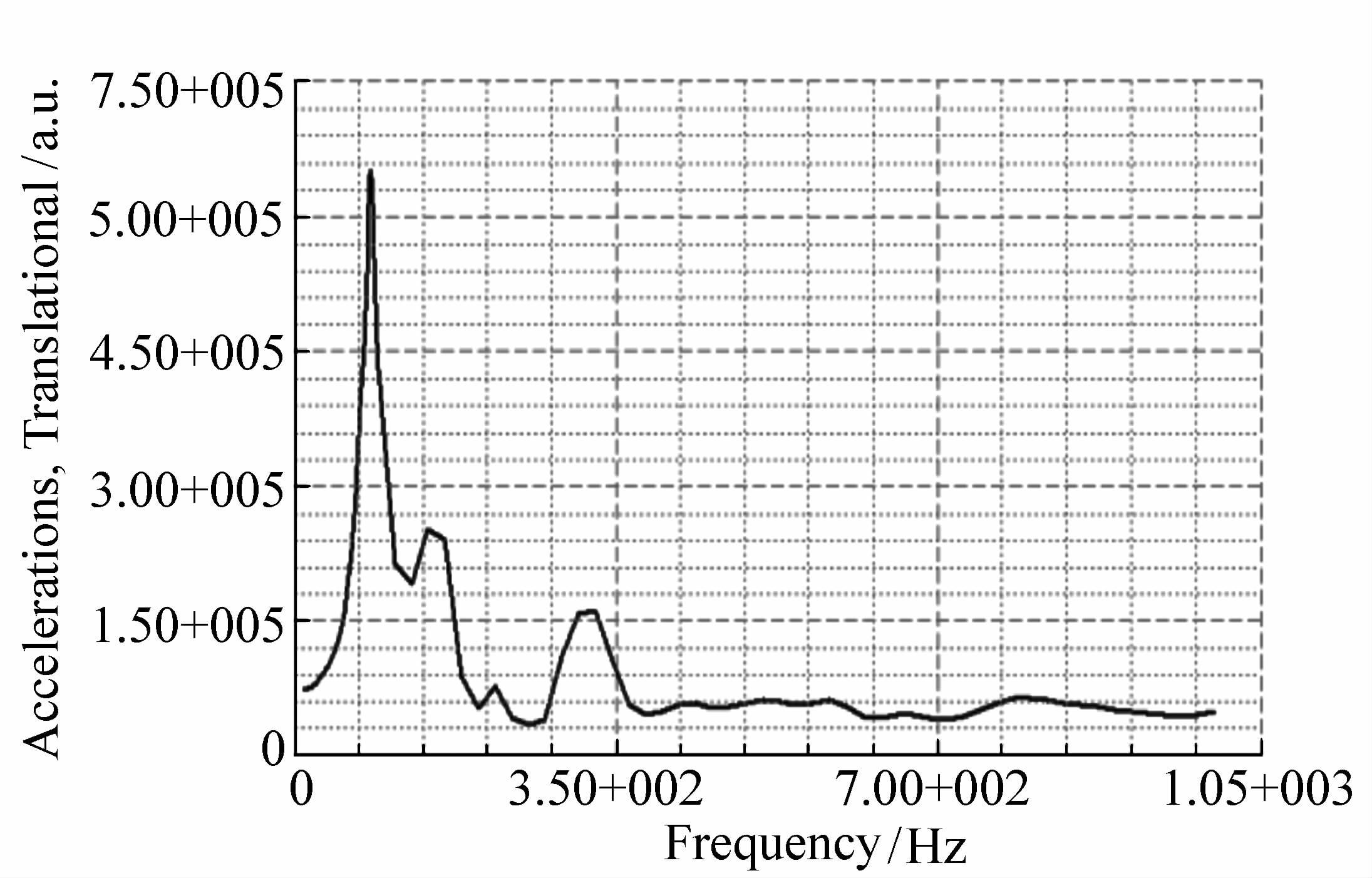
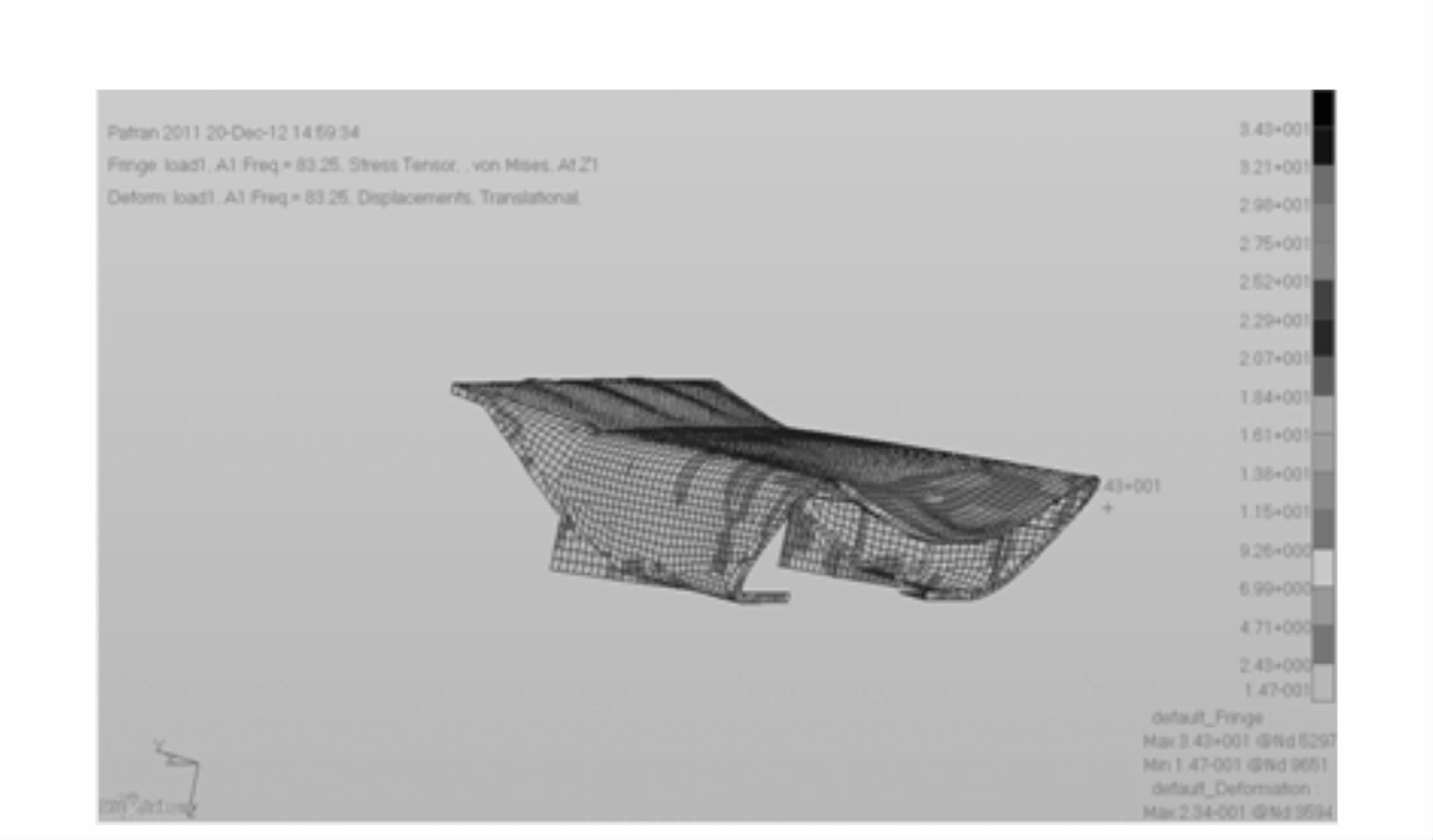
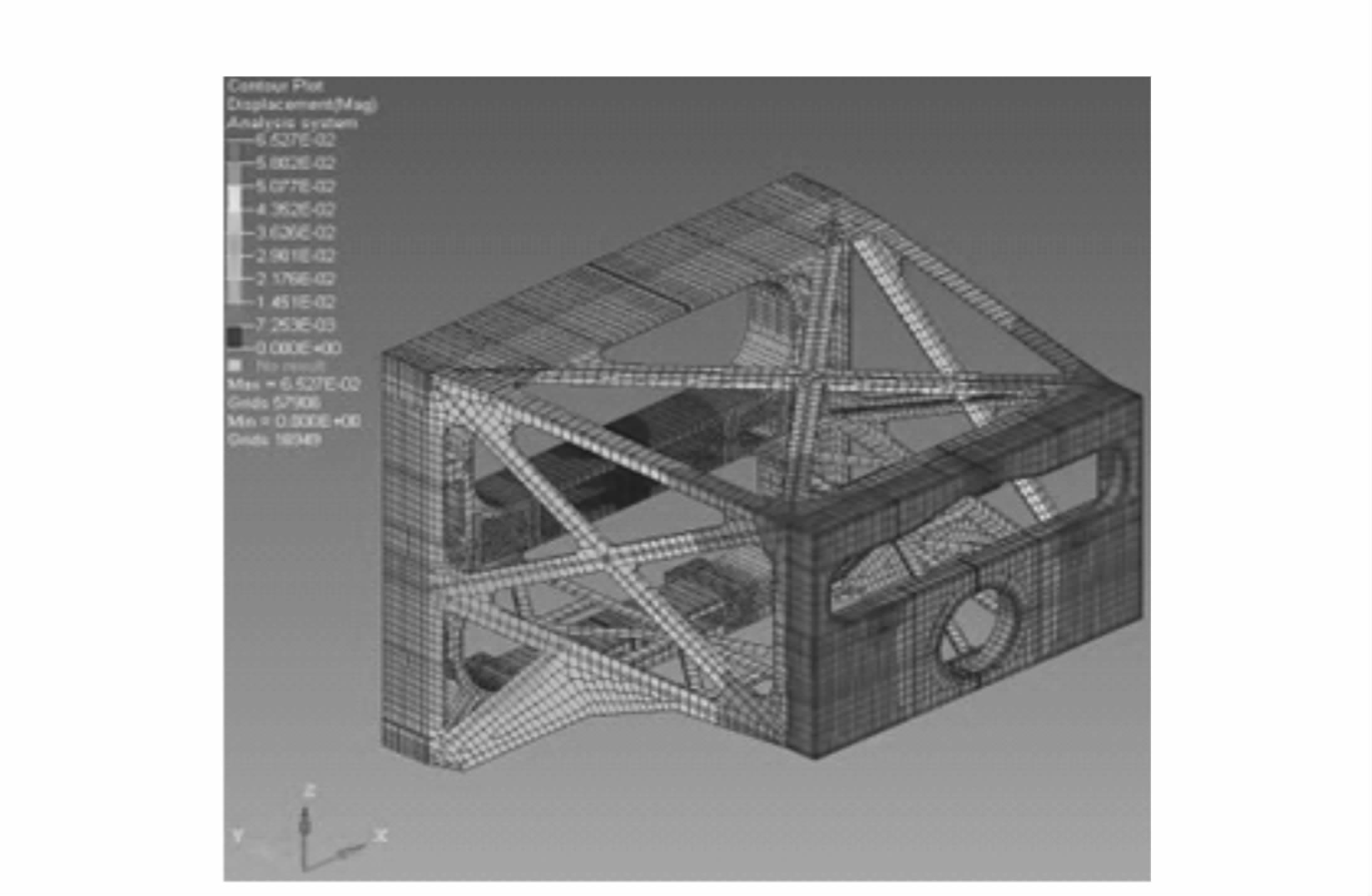
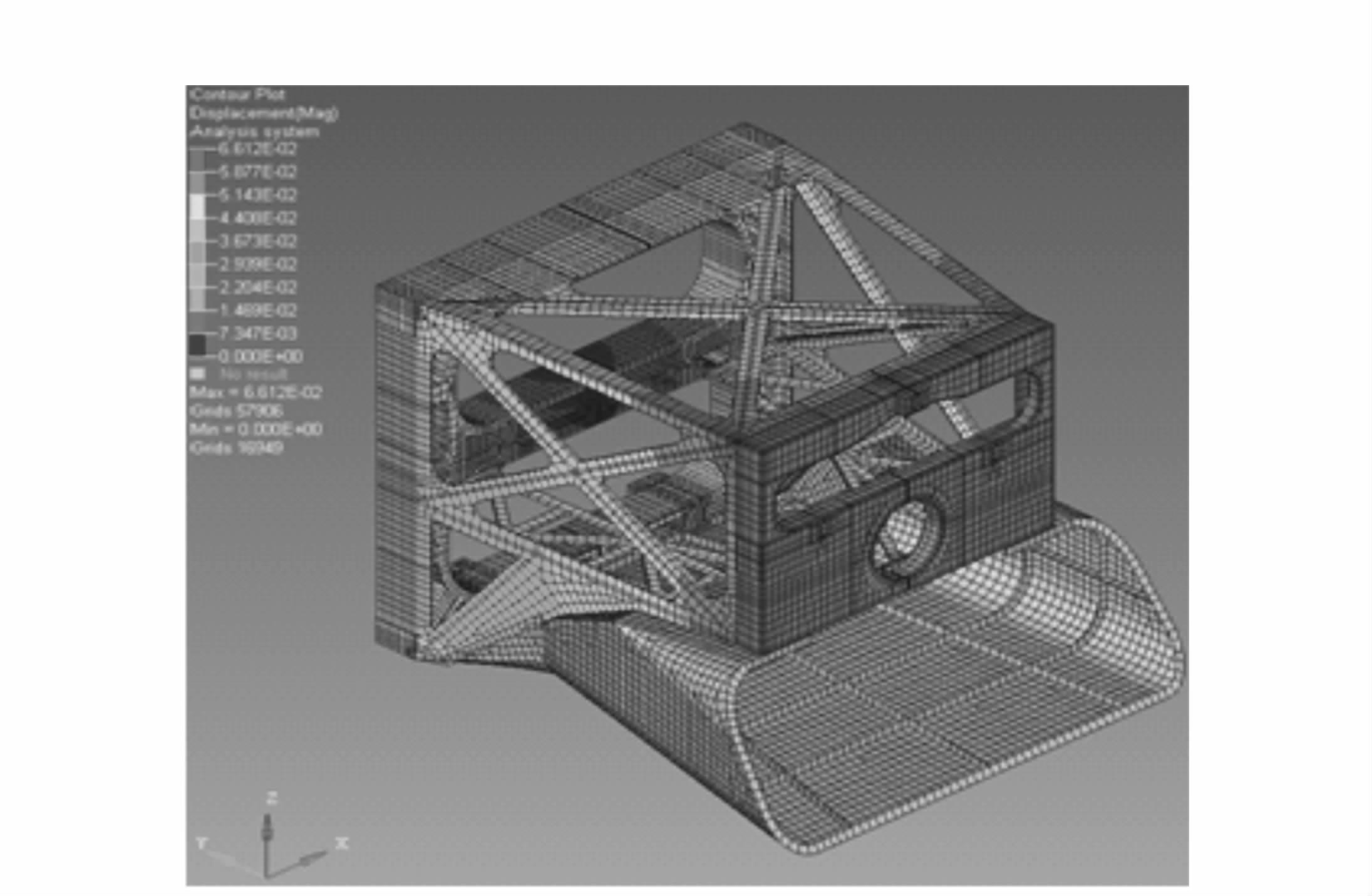
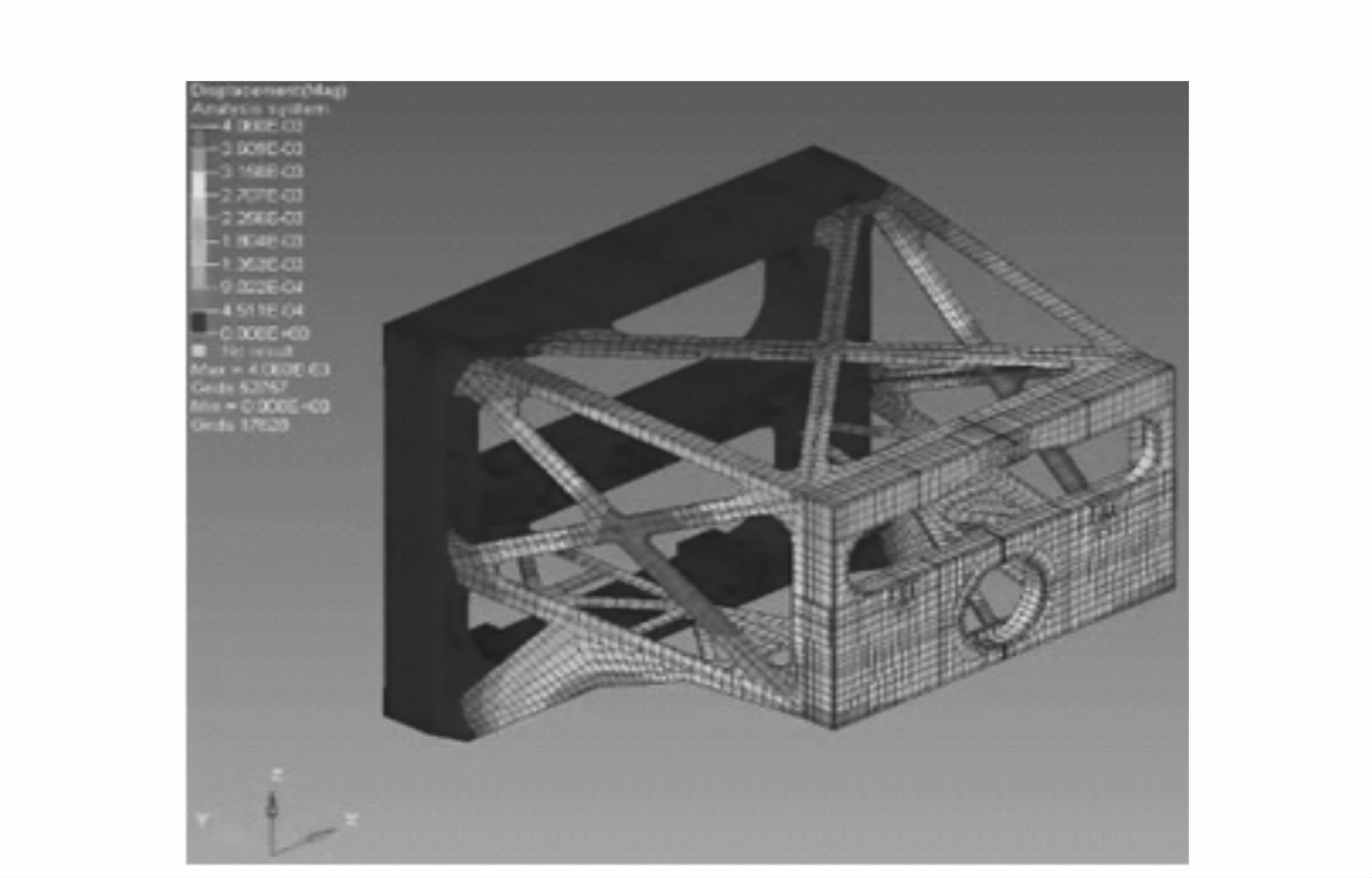
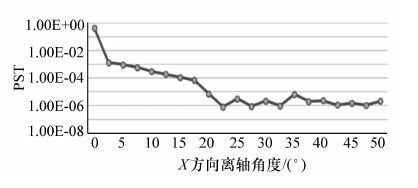
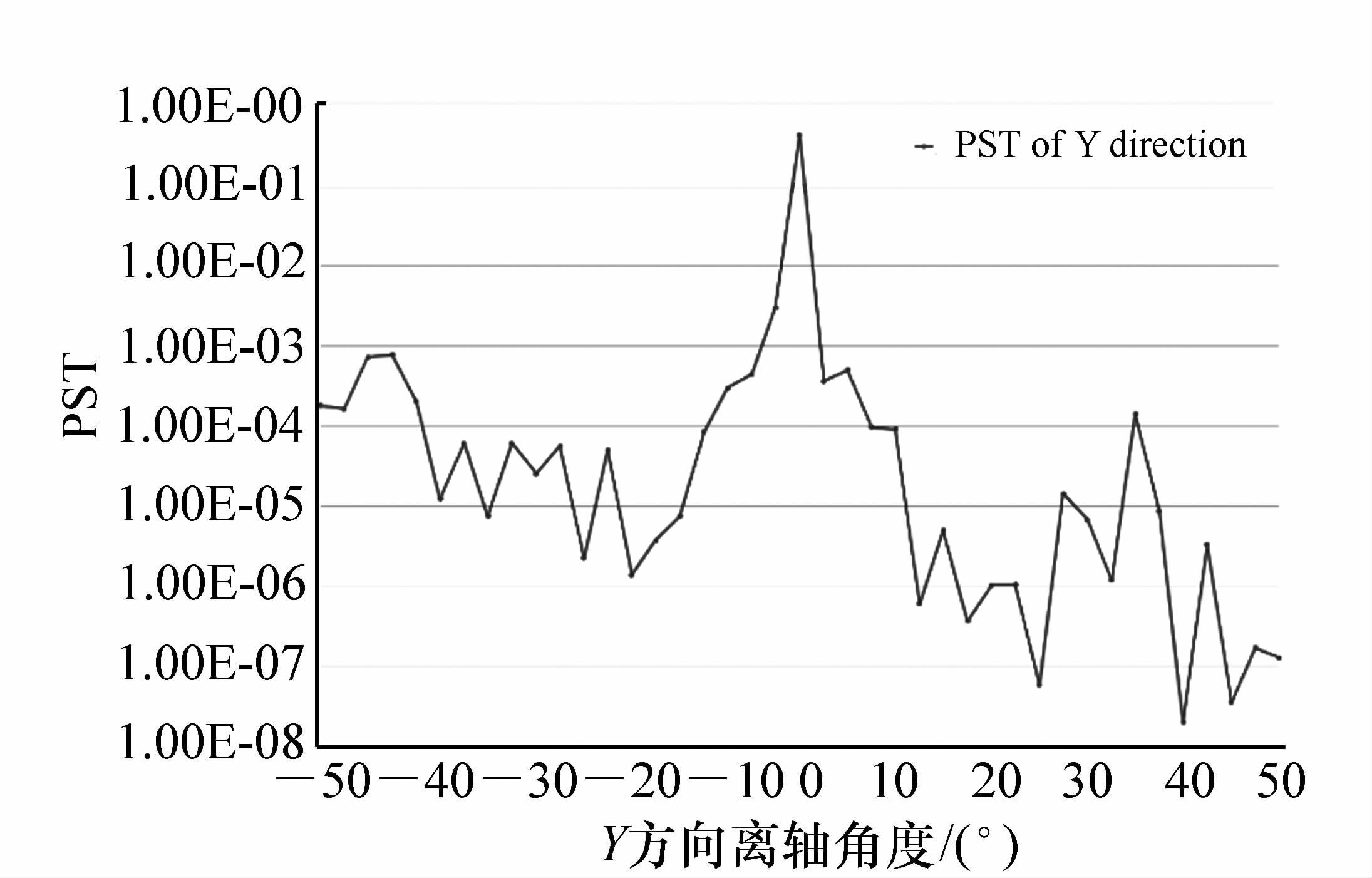
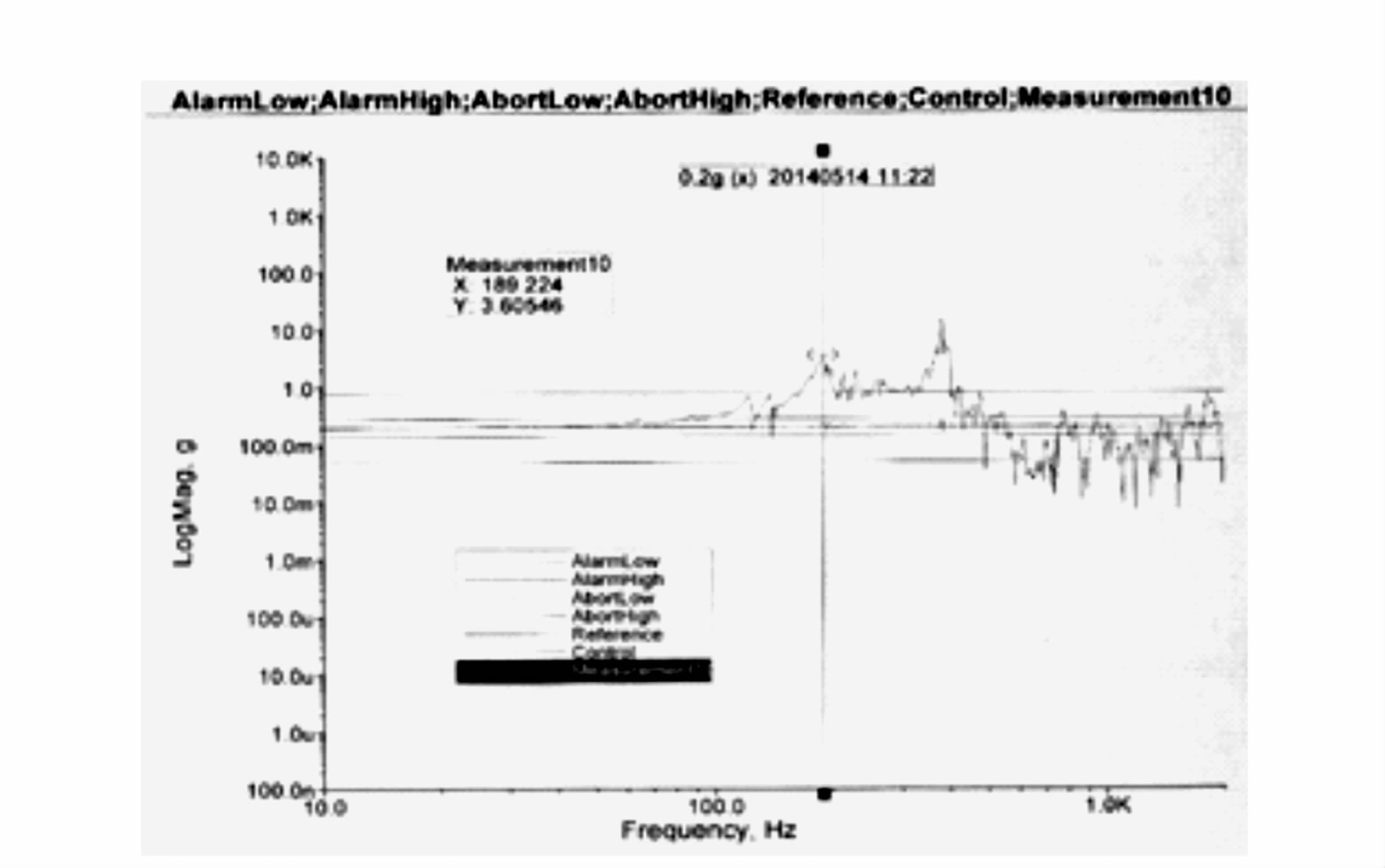
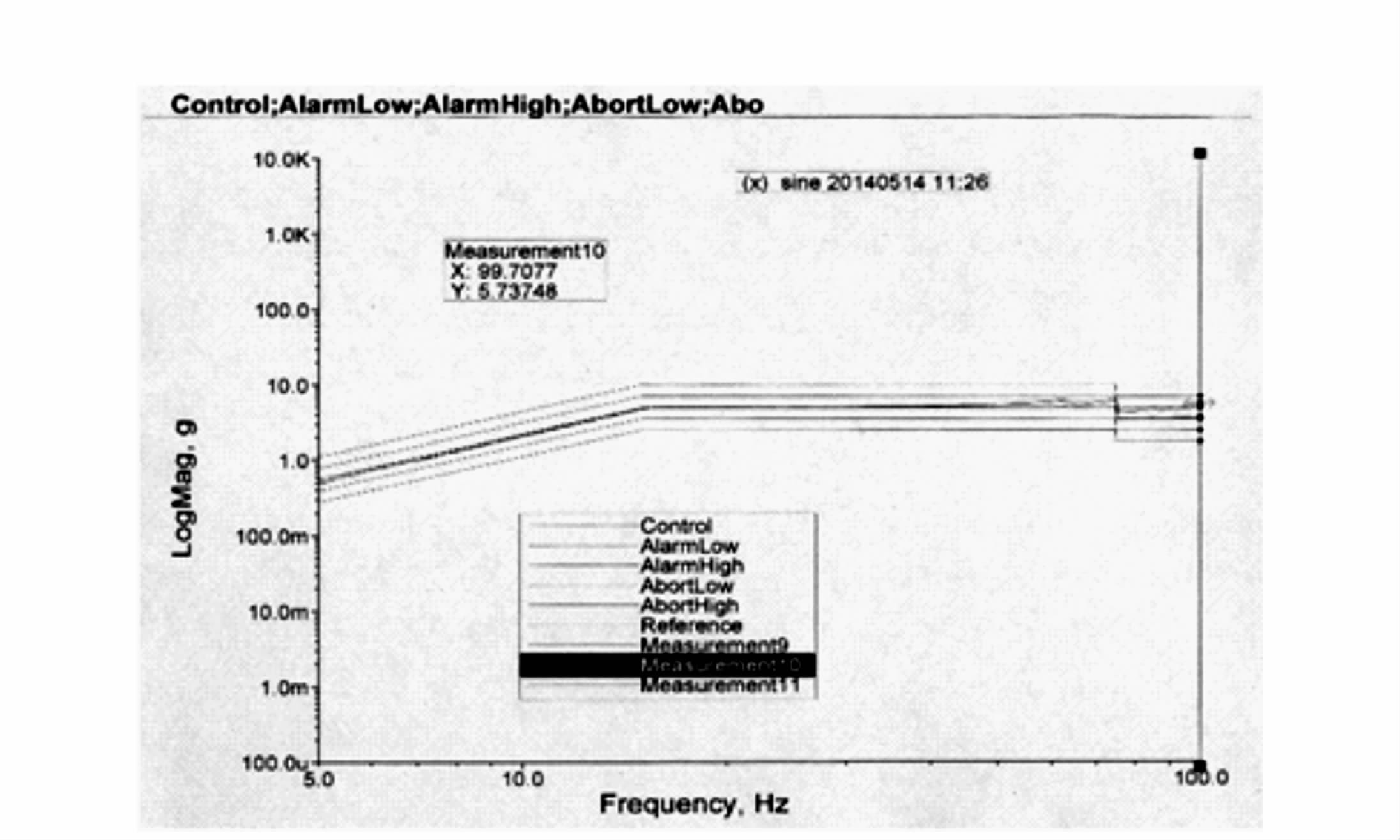
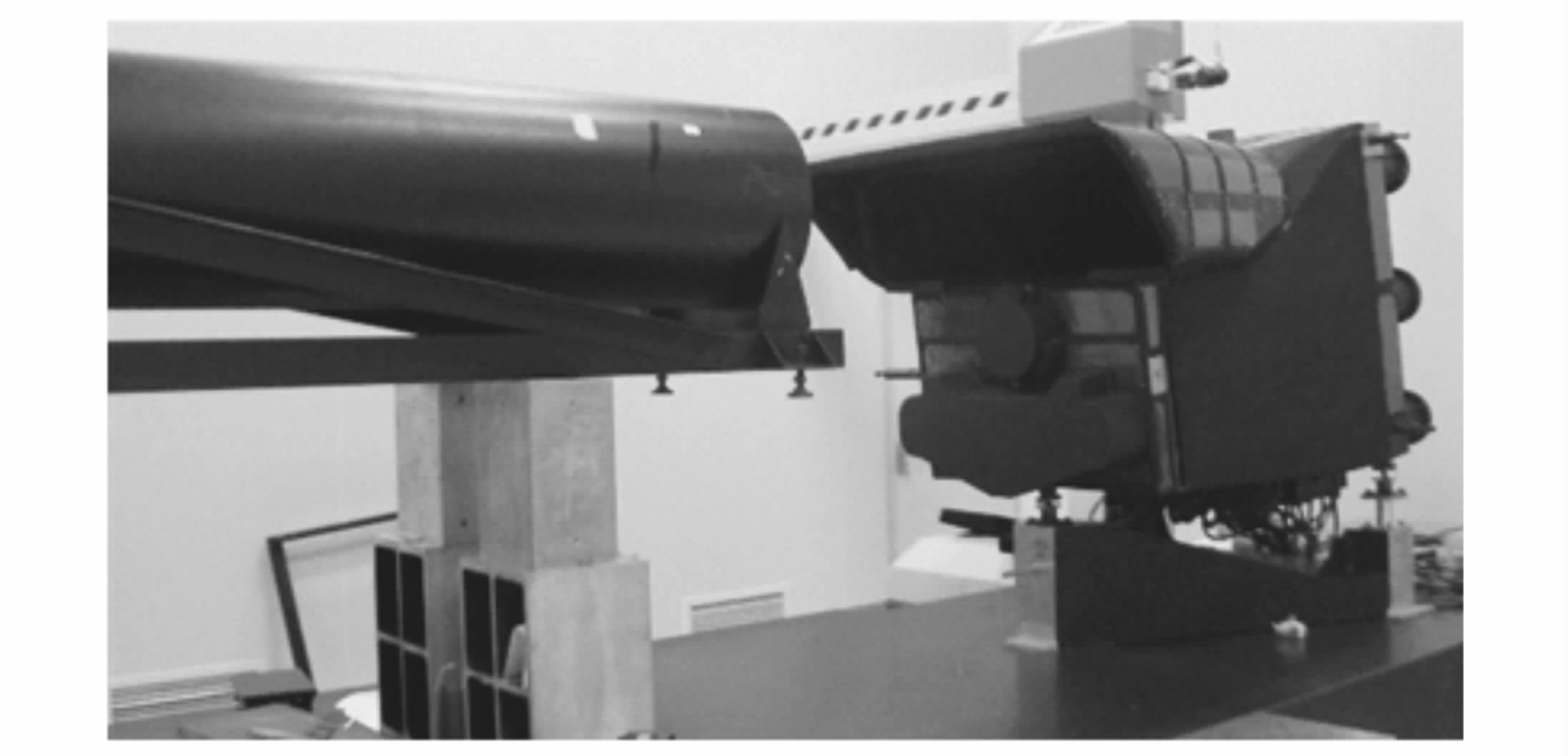
遮光罩是空间光学遥感器的重要组成部分,是抑制空间光学遥感器杂散光的首要措施。遮光罩削弱杂散光效果的好坏直接影响到光学遥感器光学系统的成像品质。本文设计了一种满足离轴三反空间光学遥感器要求的大尺寸碳纤维/环氧复合材料遮光罩,并结合有限元分析、杂散光分析及力学试验、光学系统传递函数检测手段来验证该遮光罩是否满足航天使用要求。结果显示,各视场光学系统传递函数检测结果基本一致,均在0.2以上。表明该大尺寸遮光罩具备良好的结构的稳定性、可靠性,能够满足空间应用要求。
遮光罩是空间光学遥感器的重要组成部分,是抑制空间光学遥感器杂散光的首要措施。遮光罩削弱杂散光效果的好坏直接影响到光学遥感器光学系统的成像品质。本文设计了一种满足离轴三反空间光学遥感器要求的大尺寸碳纤维/环氧复合材料遮光罩,并结合有限元分析、杂散光分析及力学试验、光学系统传递函数检测手段来验证该遮光罩是否满足航天使用要求。结果显示,各视场光学系统传递函数检测结果基本一致,均在0.2以上。表明该大尺寸遮光罩具备良好的结构的稳定性、可靠性,能够满足空间应用要求。










2016, 9(4): 483-490.
doi: 10.3788/CO.20160904.0483
摘要:
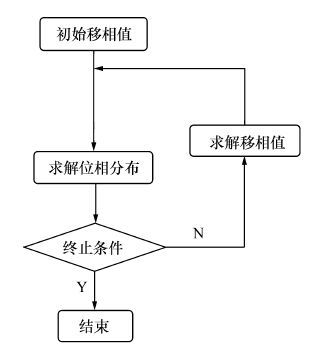
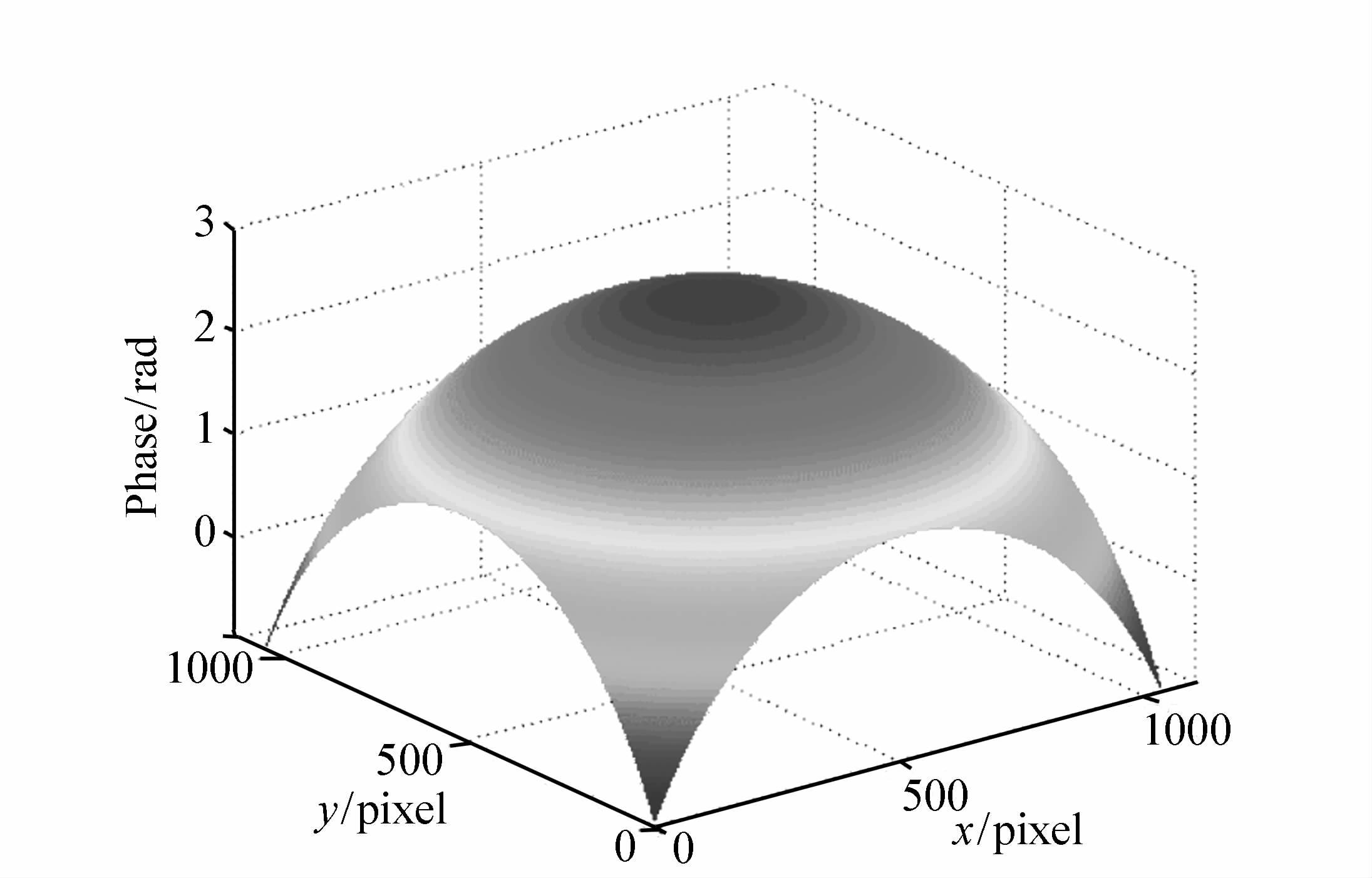
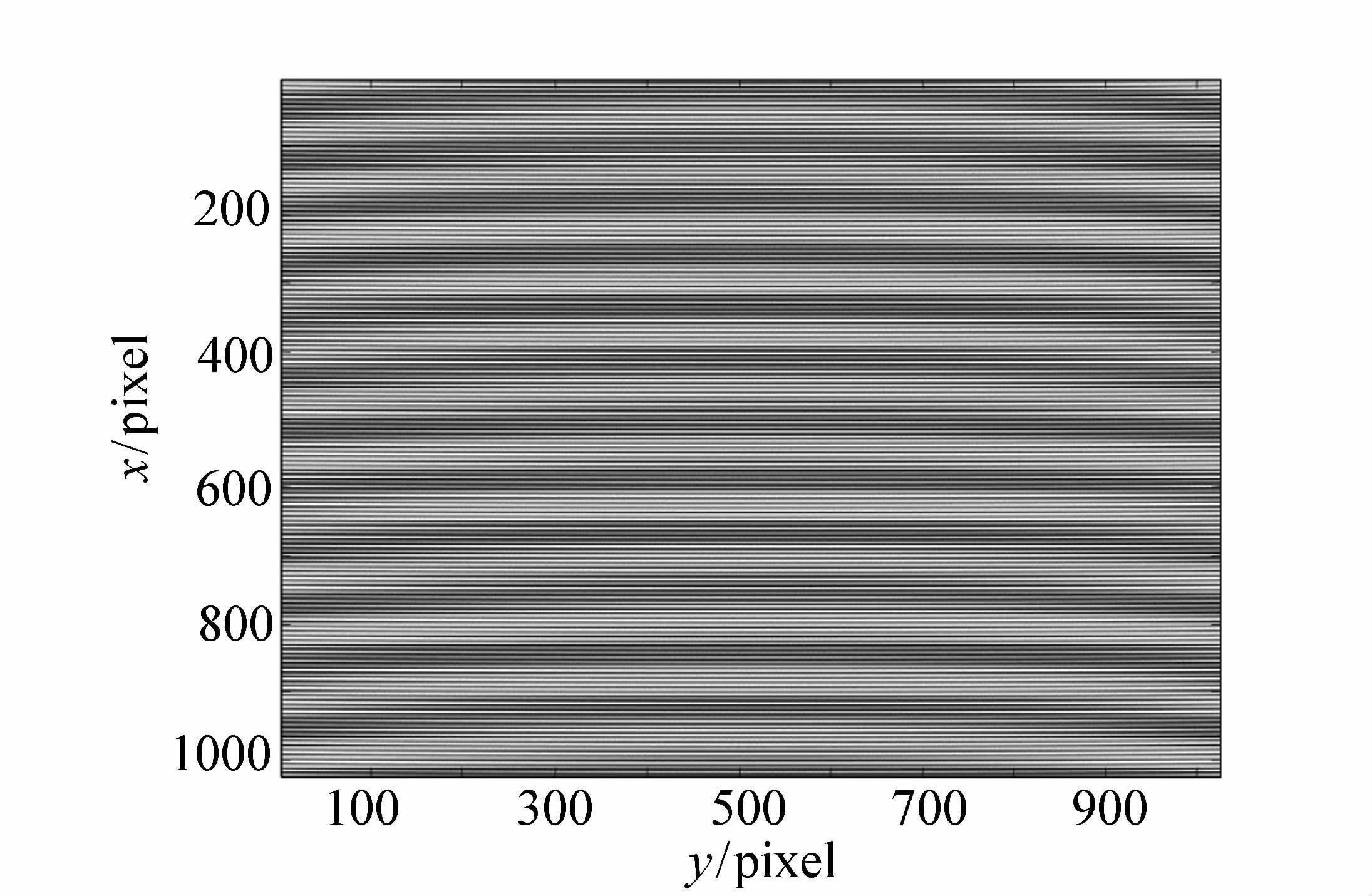
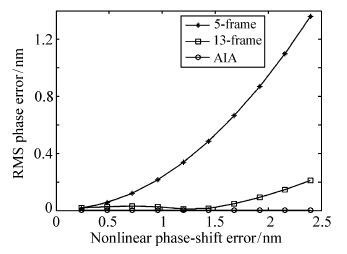
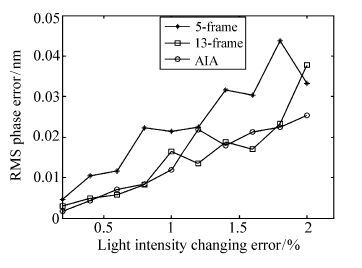
双点光源移相干涉测量是大口径光学元件位相缺陷检测的一种重要方法。为了分析双点干涉中误差对解相算法的影响,首先给出相位缺陷检测的系统结构和理论模型,在此基础上,针对测量过程中主要存在的一次移相误差、二次移相误差、光强误差和随机振动误差,研究了Hariharan 5帧移相算法、13帧移相算法和迭代随机移相算法的解相误差,并进行了仿真分析。结果表明,针对这几种误差源,13帧算法解相精度整体优于5帧法,迭代随机移相算法解相效果优于13帧法和5帧法,当这几种误差按实际指标同时作用时,迭代随机移相算法解相误差RMS小于5帧法和13帧法,PV值稳定在0.5 nm以内。由于随机振动占主要作用,说明迭代随机移相算法受误差影响很小。
双点光源移相干涉测量是大口径光学元件位相缺陷检测的一种重要方法。为了分析双点干涉中误差对解相算法的影响,首先给出相位缺陷检测的系统结构和理论模型,在此基础上,针对测量过程中主要存在的一次移相误差、二次移相误差、光强误差和随机振动误差,研究了Hariharan 5帧移相算法、13帧移相算法和迭代随机移相算法的解相误差,并进行了仿真分析。结果表明,针对这几种误差源,13帧算法解相精度整体优于5帧法,迭代随机移相算法解相效果优于13帧法和5帧法,当这几种误差按实际指标同时作用时,迭代随机移相算法解相误差RMS小于5帧法和13帧法,PV值稳定在0.5 nm以内。由于随机振动占主要作用,说明迭代随机移相算法受误差影响很小。


2016, 9(4): 491-500.
doi: 10.3788/CO.20160904.0491
摘要:
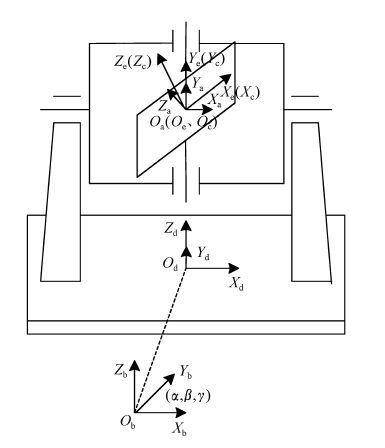
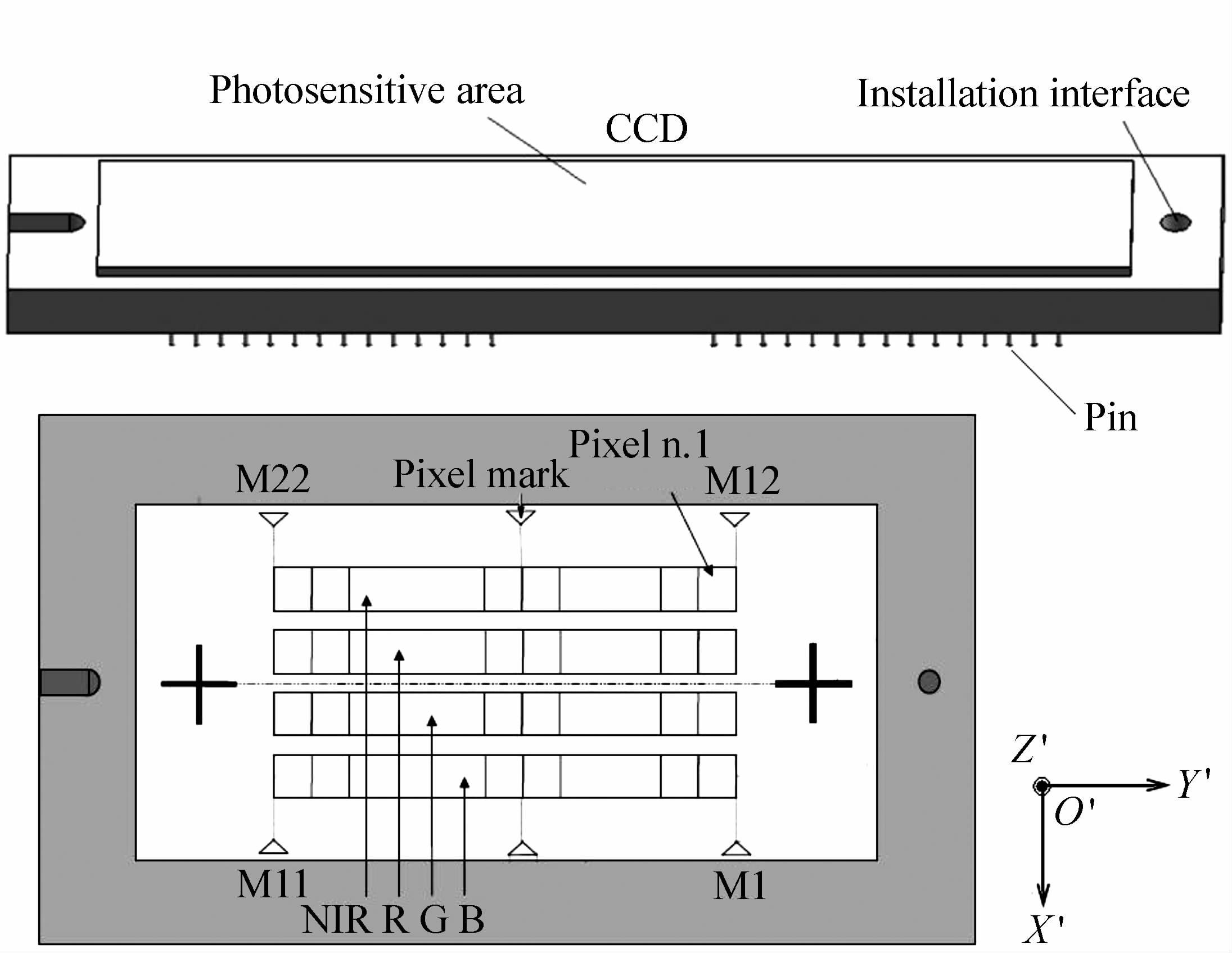
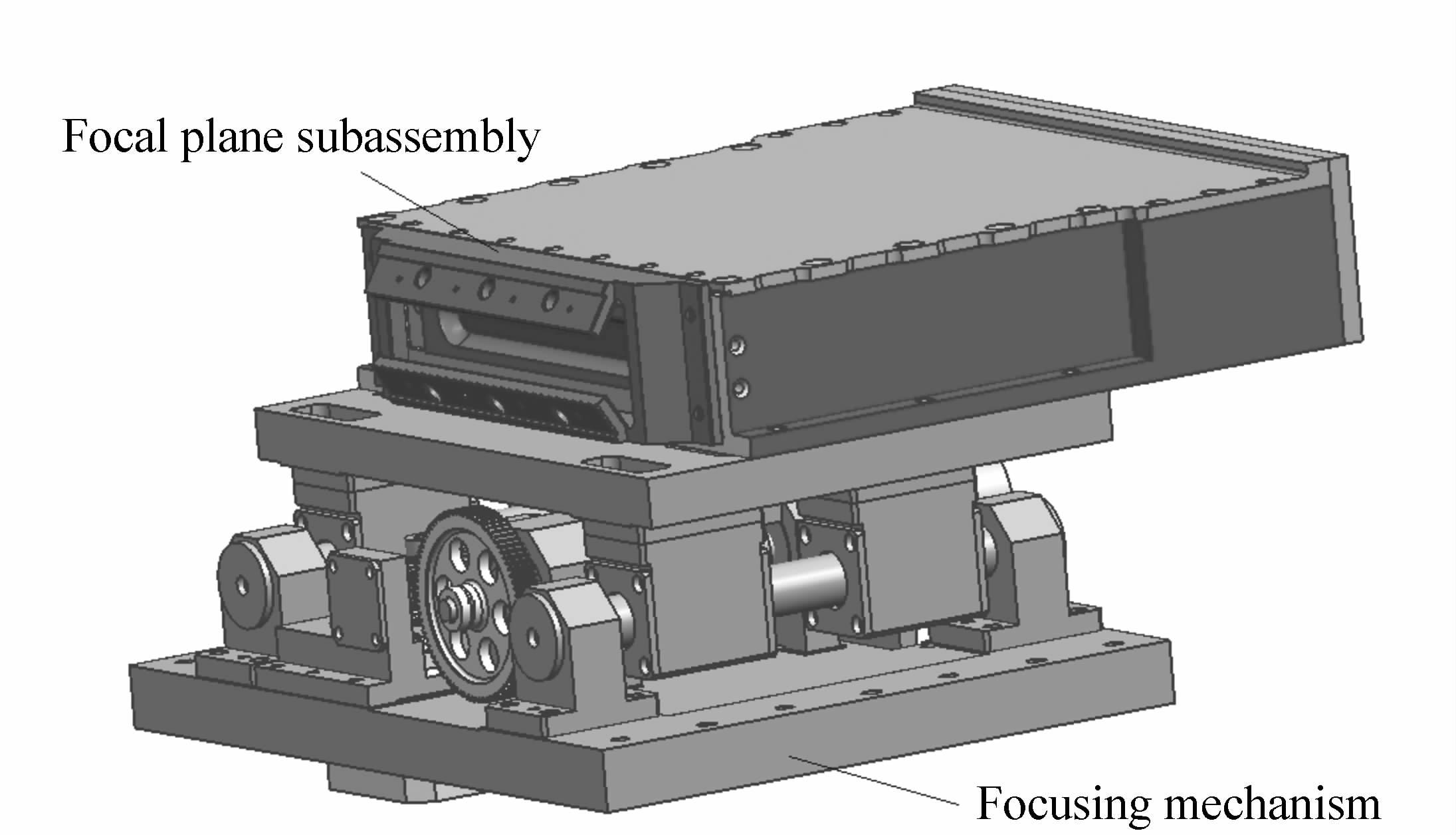
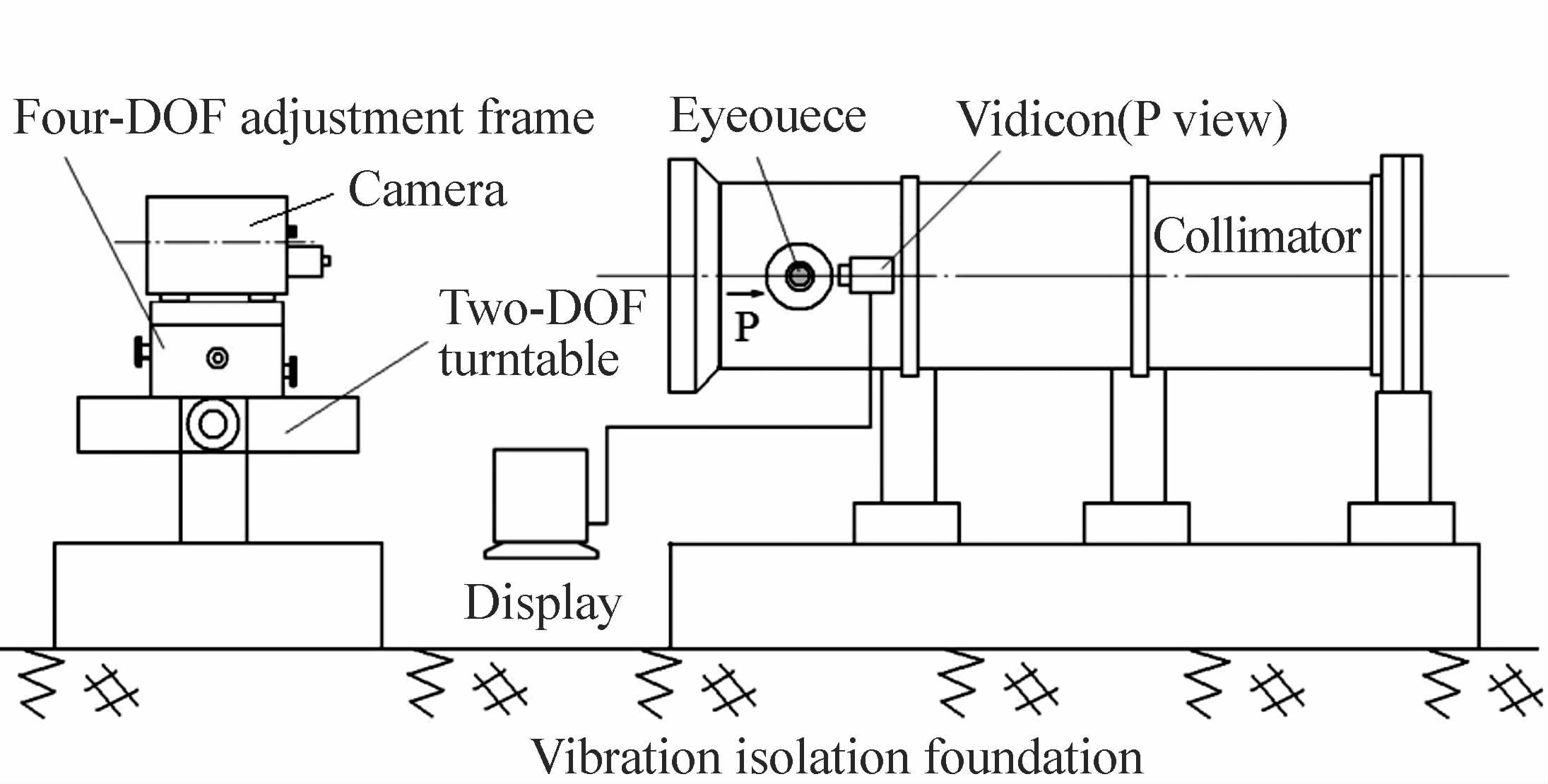
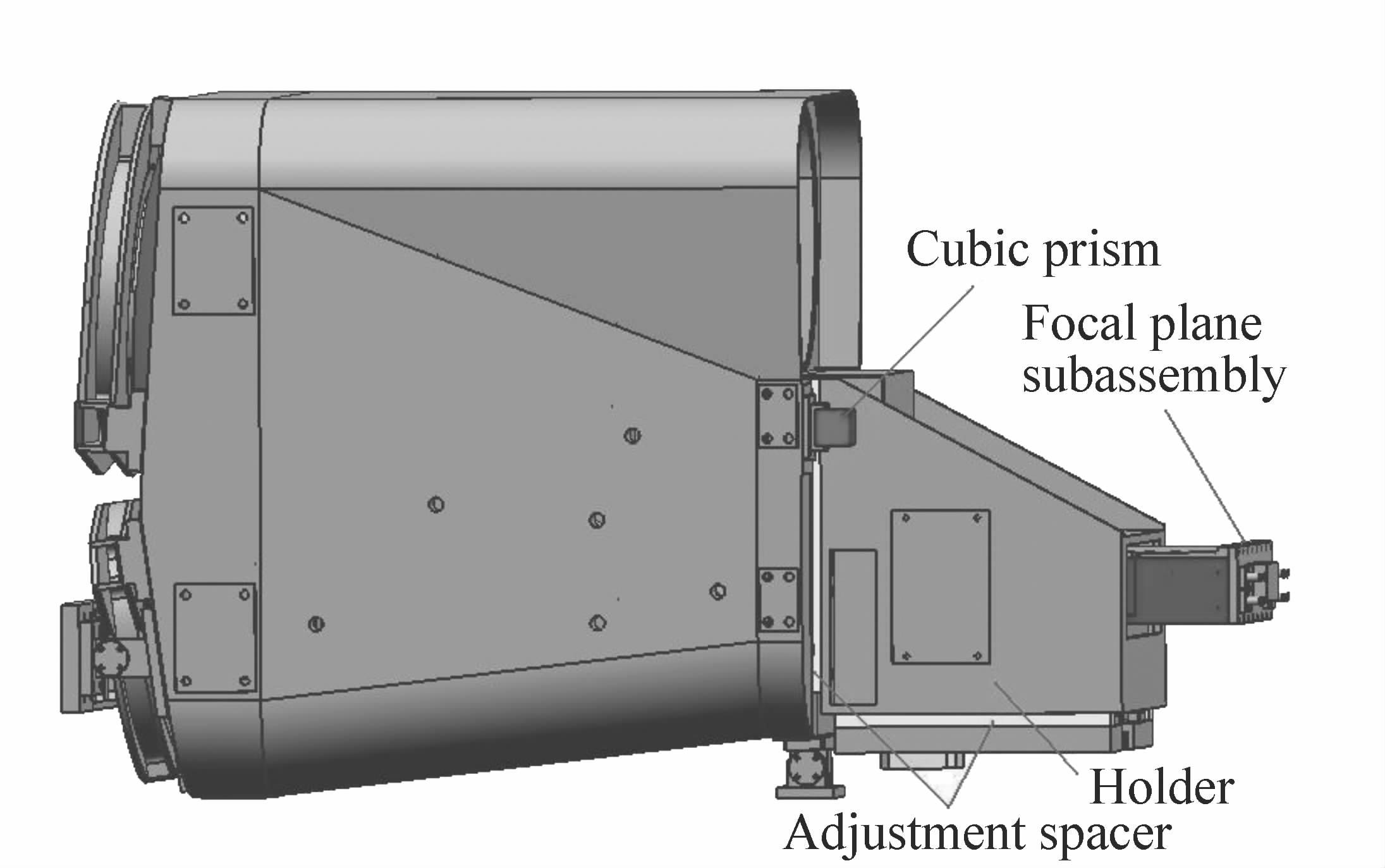
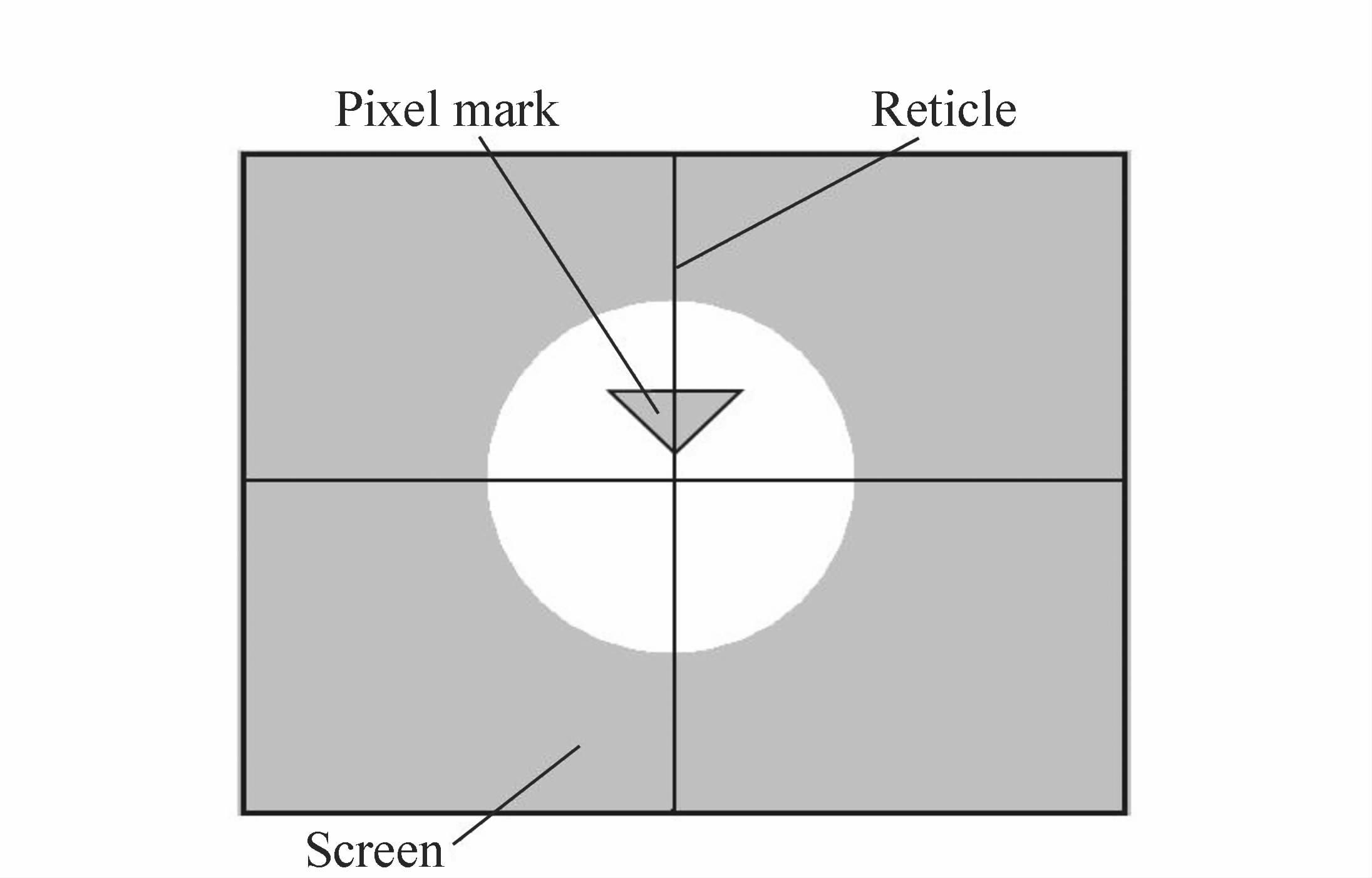
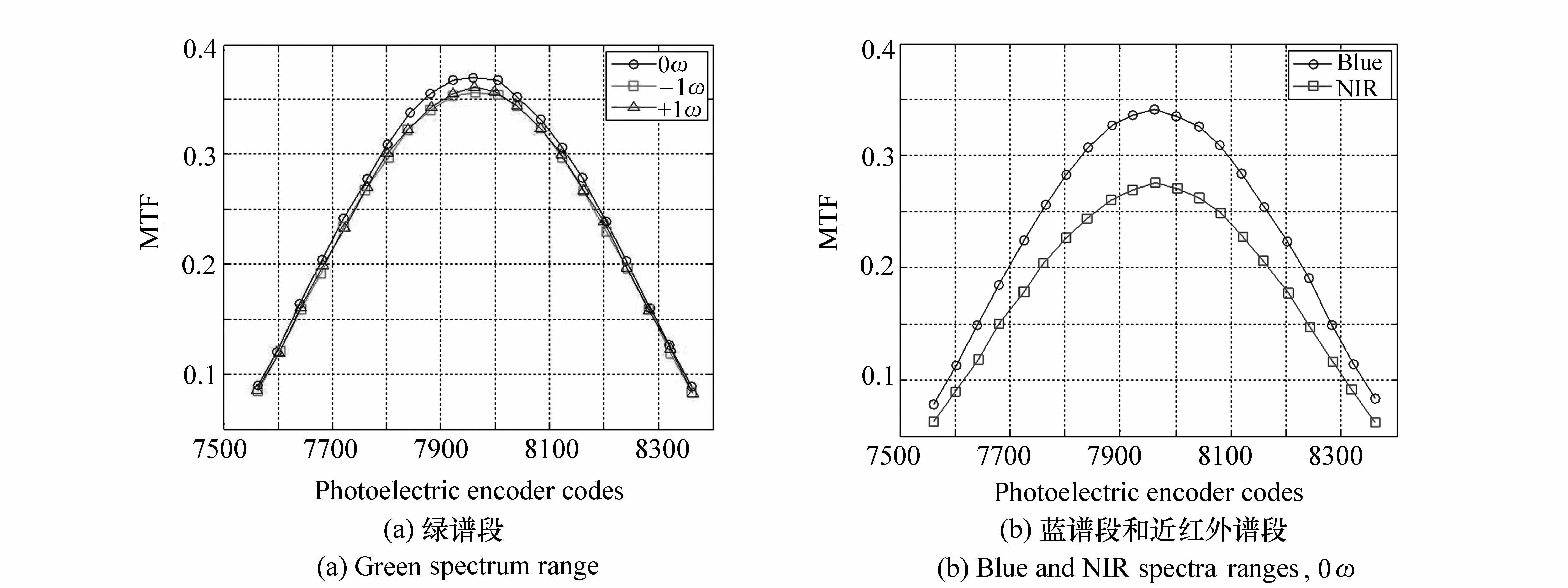
针对某离轴多光谱相机焦平面高精度的装调要求,设计了焦平面组件,阐述了装调、检测的仪器设备和方法。首先将焦平面组件安装至镜头,测量并解算出CCD光敏面的角度和位移偏差,接着根据偏差确定调整垫修研量,进行初次修垫并重新安装,然后利用调整工装微调CCD姿态至满足指标要求,调整垫处打销钉定位,最后根据拟合出的最佳焦平面位置再次修研调整垫,利用销钉复位完成装调工作。检测结果表明,相机的CCD光敏面相对于设计焦平面三维角度偏差分别为Δα=-6.7",Δβ=1.9',Δγ=13.2",三维位移偏差分别为Δx=-0.004 mm,Δy=0.006 mm,Δz=-0.070 mm,相机四谱段、全视场MTF优于0.25,满足设计和装调要求。测量和解算误差分析表明,所用的设备与方法能够满足装调精度的要求,可以为此类相机的研制提供一定的技术参考。
针对某离轴多光谱相机焦平面高精度的装调要求,设计了焦平面组件,阐述了装调、检测的仪器设备和方法。首先将焦平面组件安装至镜头,测量并解算出CCD光敏面的角度和位移偏差,接着根据偏差确定调整垫修研量,进行初次修垫并重新安装,然后利用调整工装微调CCD姿态至满足指标要求,调整垫处打销钉定位,最后根据拟合出的最佳焦平面位置再次修研调整垫,利用销钉复位完成装调工作。检测结果表明,相机的CCD光敏面相对于设计焦平面三维角度偏差分别为Δα=-6.7",Δβ=1.9',Δγ=13.2",三维位移偏差分别为Δx=-0.004 mm,Δy=0.006 mm,Δz=-0.070 mm,相机四谱段、全视场MTF优于0.25,满足设计和装调要求。测量和解算误差分析表明,所用的设备与方法能够满足装调精度的要求,可以为此类相机的研制提供一定的技术参考。




2016, 9(4): 501-510.
doi: 10.3788/CO.20160904.0501
摘要:
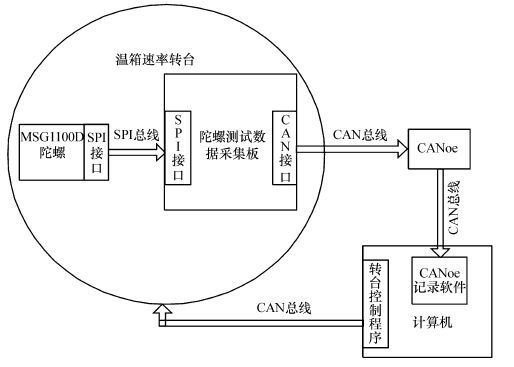
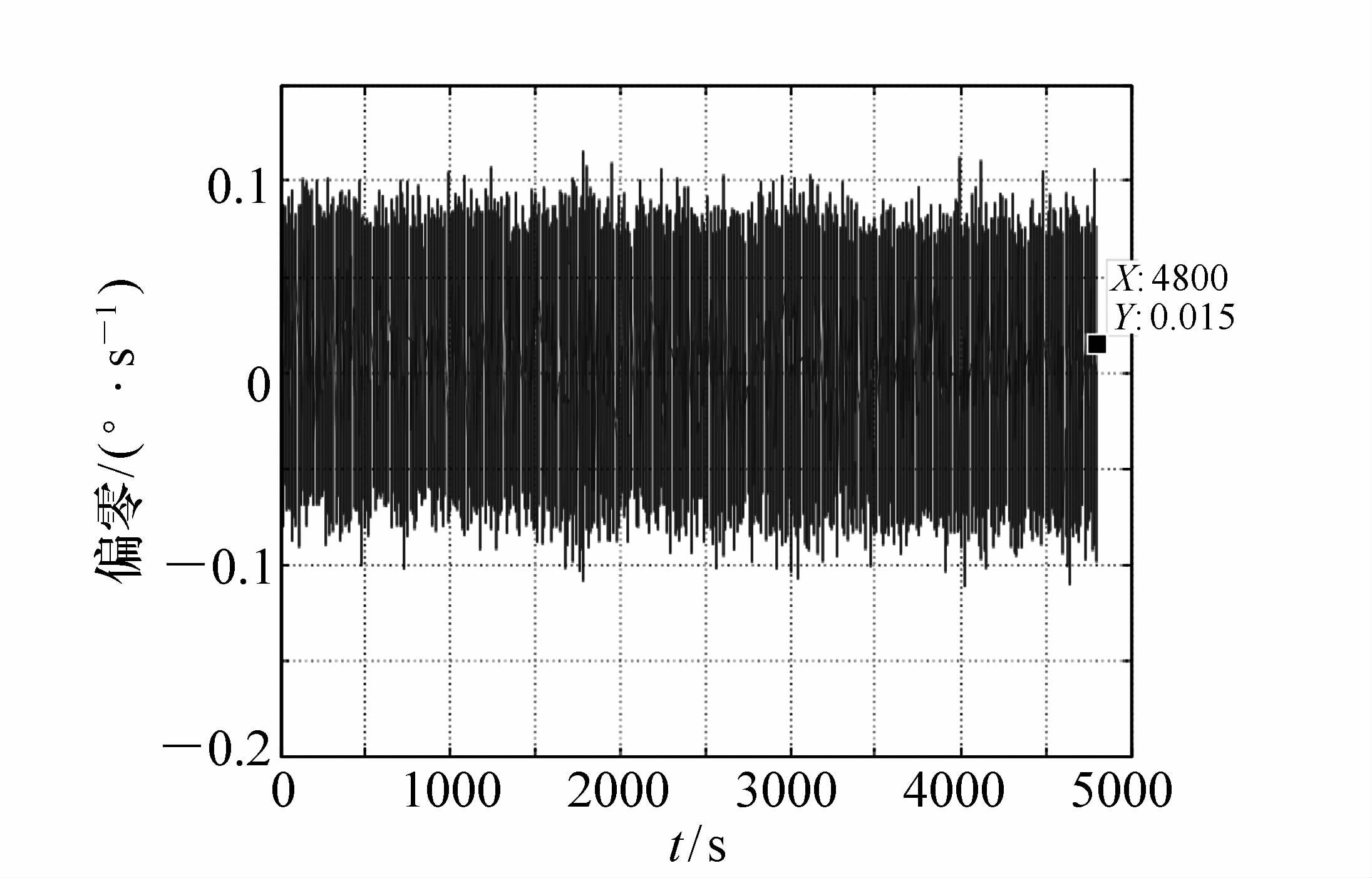
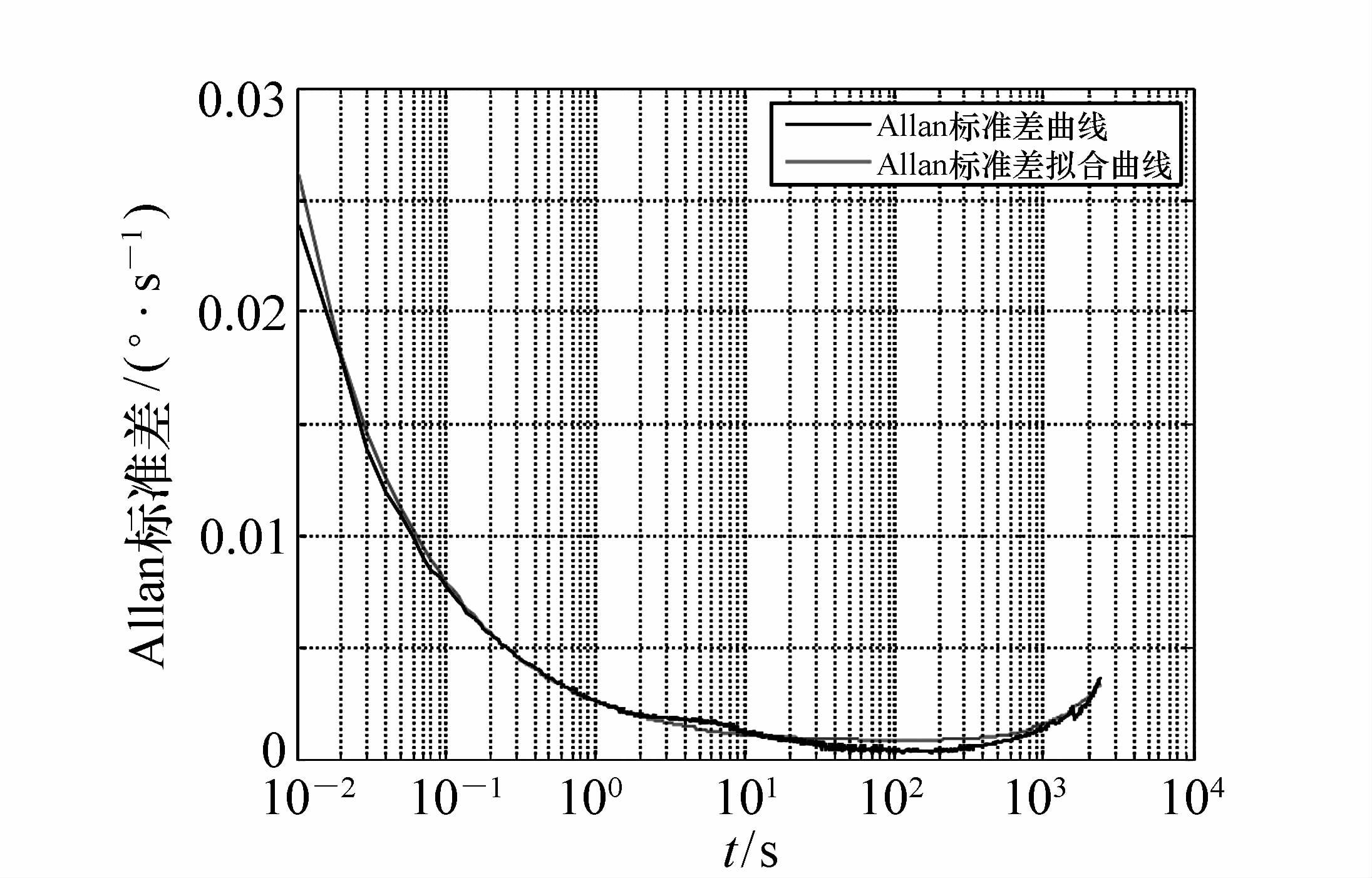
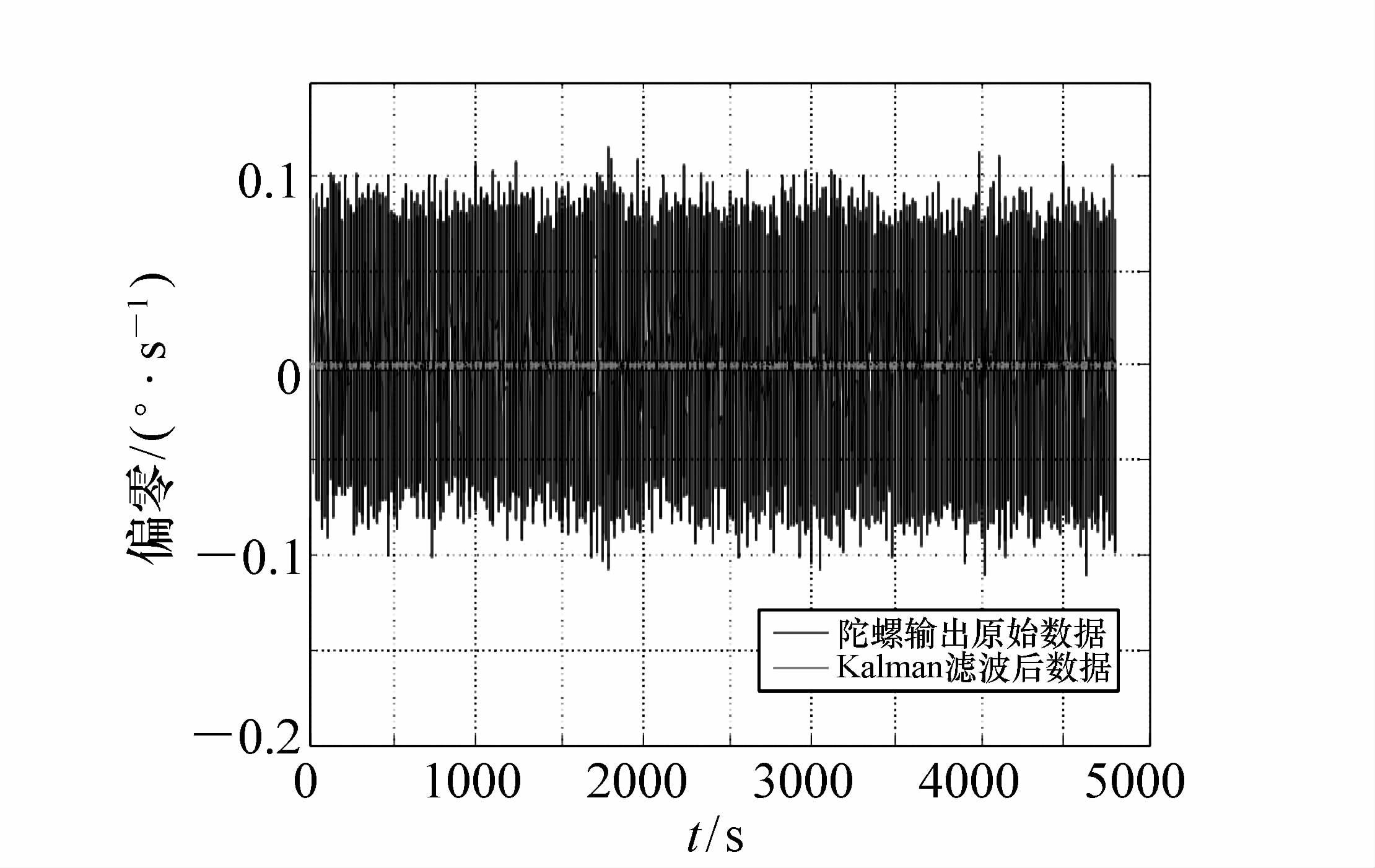
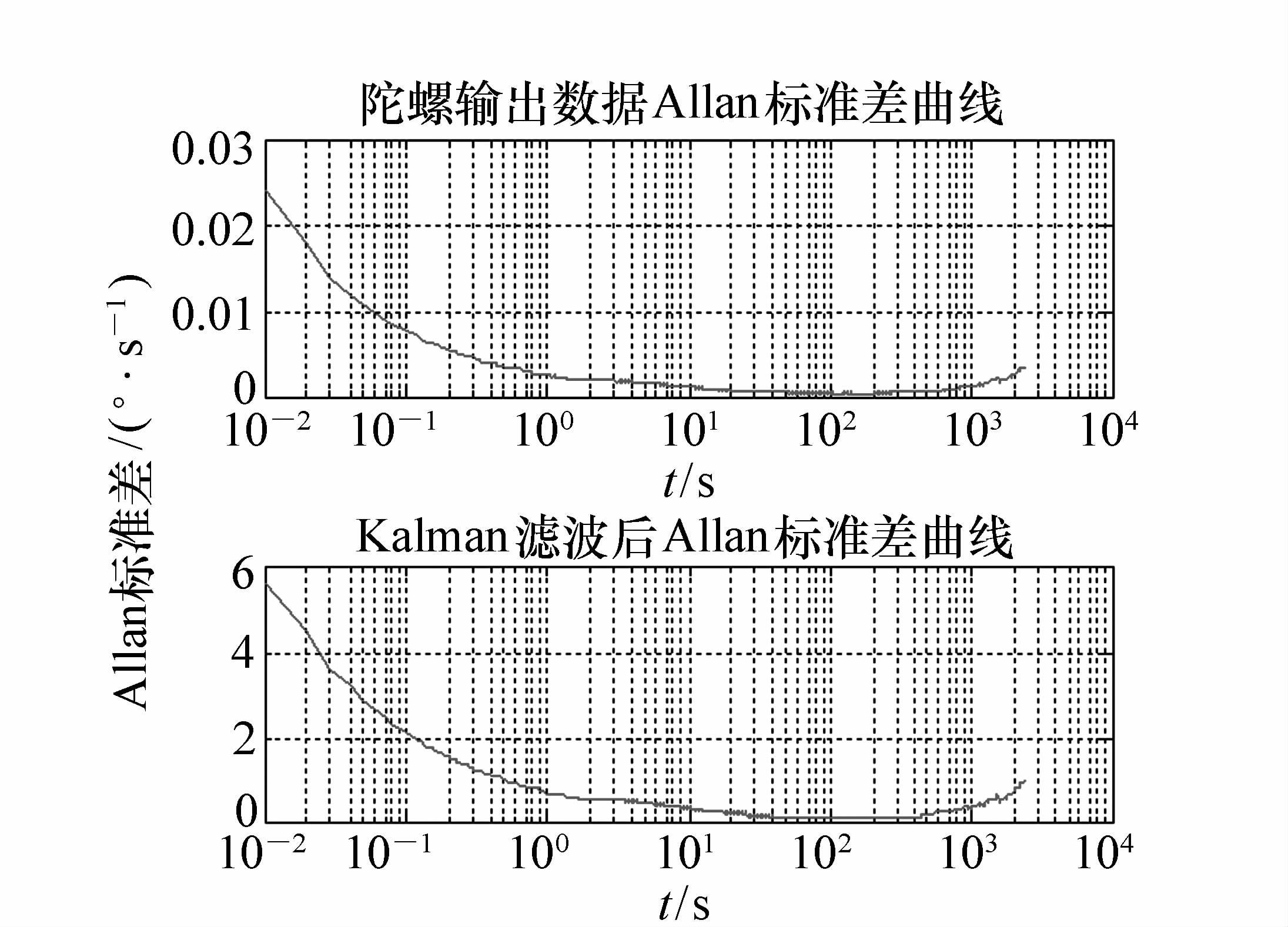
为了提高MEMS陀螺输出角速度的精度,采用Allan分析法以及Kalman滤波算法对MEMS陀螺仪进行随机误差分析和补偿。由Allan方差分析陀螺的输出数据,对Allan方差进行最小二乘法拟合,得到各项随机噪声的定量评价指标;对陀螺的输出数据使用AR模型进行数学建模,采用AIC准则确定了AR模型的阶次,建立了陀螺零漂数据的离散时间表达式;在AR模型所建立的陀螺随机误差模型的基础上,设计了Kalman滤波器,对陀螺输出数据使用Kalman算法进行了滤波处理,对陀螺的随机误差进行了补偿;通过Allan方差对Kalman算法对陀螺随机误差的补偿效果进行分析。实验结果表明:角速率随机游走Kalman滤波前为0.1487°/$\sqrt{h}$,Kalman滤波补偿后为0.0041°/$\sqrt{h}$,通过补偿可减小97.24%的角速率随机游走误差;零偏不稳定性Kalman滤波前为1.9408°/h,Kalman滤波补偿后为0.0542°/h,通过补偿可减小97.21%的零偏不稳定性误差;速率随机游走Kalman滤波前为2.6985°/h$\frac{3}{2}$,Kalman滤波补偿后为0.3343°/h$\frac{3}{2}$,通过补偿可减小87.61%的速率随机游走误差。Kalman滤波适用于MEMS陀螺的滤波处理,可有效降低陀螺的随机误差。
为了提高MEMS陀螺输出角速度的精度,采用Allan分析法以及Kalman滤波算法对MEMS陀螺仪进行随机误差分析和补偿。由Allan方差分析陀螺的输出数据,对Allan方差进行最小二乘法拟合,得到各项随机噪声的定量评价指标;对陀螺的输出数据使用AR模型进行数学建模,采用AIC准则确定了AR模型的阶次,建立了陀螺零漂数据的离散时间表达式;在AR模型所建立的陀螺随机误差模型的基础上,设计了Kalman滤波器,对陀螺输出数据使用Kalman算法进行了滤波处理,对陀螺的随机误差进行了补偿;通过Allan方差对Kalman算法对陀螺随机误差的补偿效果进行分析。实验结果表明:角速率随机游走Kalman滤波前为0.1487°/$\sqrt{h}$,Kalman滤波补偿后为0.0041°/$\sqrt{h}$,通过补偿可减小97.24%的角速率随机游走误差;零偏不稳定性Kalman滤波前为1.9408°/h,Kalman滤波补偿后为0.0542°/h,通过补偿可减小97.21%的零偏不稳定性误差;速率随机游走Kalman滤波前为2.6985°/h$\frac{3}{2}$,Kalman滤波补偿后为0.3343°/h$\frac{3}{2}$,通过补偿可减小87.61%的速率随机游走误差。Kalman滤波适用于MEMS陀螺的滤波处理,可有效降低陀螺的随机误差。