


Design of asymmetric space optical remote sensor active thermal control system by multi-objective optimization
-
摘要: 针对大口径、离轴、非对称结构的空间光学遥感器主动热控功率最小分配的难题,提出一种基于多目标遗传算法的功率优化方法。首先根据空间相机结构建立有限元模型。然后,凭借设计者的经验,根据相机结构特点及大致热分布规律,初步划分热控区域,规划设计变量和目标变量。之后,将设计变量和目标变量代入多目标遗传算法求出Pareto最优解集。最后,在最优解集中选出合适的功率分配代入到仿真模型中进行计算,得到优化后的功率分配及温度场。对某离轴三反空间相机进行了功率优化和地面热平衡试验。经TMG仿真计算,优化后整机波动范围在低温工况和高温工况分别降低了4.76%和35.7%,并且总功耗降低了6.85%。经地面热平衡试验表明,整机温度场温差控制在±0.5℃以内,满足±2℃的指标要求。Abstract: As for active thermal control problem of minimum power allocation in space optical remote sensor with large diameter, off-axis, symmetric structure, a power optimization method based on multi objective genetic algorithm is proposed in this paper. First of all, according to the spatial structure of the camera a finite element model is created. The next, heat distribution is divided by the experience of the designer's depending on the camera structural characteristics. Design variables and target variables are selected. Then, we plug the design variables and target variables into the multiple objective genetic algorithm and Pareto sets are obtained. Finally, suitable power allocation is selected from the set of optimal solution and substituted into the simulation model. Then the optimization of power distribution and temperature field are obtained. In this paper an off-axis three mirrors space camera is optimized and tested. After optimization and TMG simulation, the total temperature difference is reduced by 4.76% under low temperature condition and 35.7% under high temperature condition. The result of the heat balance shows that the temperature field of the whole camera is controlled within ±0.5 ℃ or less, which is far less than the target requirements of ±2 ℃.
-
Key words:
- remote sensor /
- thermal design /
- multi-objective genetic algorithm
-

图 2 某非对称结构空间光学遥感器热控区域分布图
Figure 2. Thermal control area distribution of a space optical remote with non-symmetrical structure

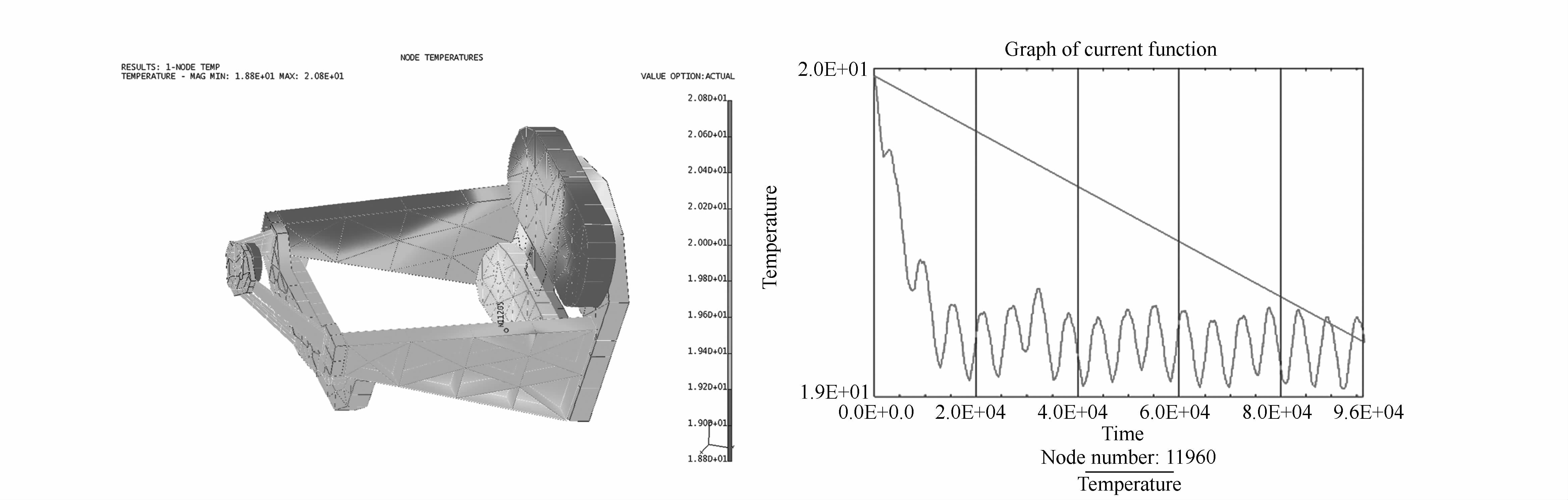
图 8 优化后高温工况温度分布
Figure 8. Temperature distribution under high temperature conditions after optimization

图 11 高温16 ℃工况温度曲线
Figure 11. Temperature curves of high temperature conditions at 16 ℃
表 1 相机热控分区
Table 1. Thermal control district of cameras
序号 加热区位置 H1 左梁前段 H2 左梁后段 H3 右梁前段 H4 右梁后段 H5 次镜背板 H6 折迭镜背板 H7 支撑板 H8 焦面 H9 遮光罩1 H10 遮光罩2 H11 遮光罩3 H12 遮光罩4 H13 三镜对应背板 H14 主镜对应背板 H15 支撑架1 H16 支撑架2 H17 支撑架3 H18 电控箱  下载: 导出CSV
下载: 导出CSV
表 2 常规方法分区热控功率分配
Table 2. Power distribution of common subarea thermal control
序号 设计功率/W H1 8 H2 8 H3 16 H4 16 H5 4 H6 12 H7 6 H8 0 H9 5 H10 5 H11 5 H12 5 H13 15 H14 16 H15 3 H16 3 H17 3 H18 0 总功率 130
下载: 导出CSV
表 3 设计变量编号及位置
Table 3. Designed variable number and location
编号 加热区位置 H1 左梁前段 H2 左梁后段 H3 右梁前段 H4 右梁后段 H5 次镜背板 H6 折迭镜背板 H7 支撑板 H9 遮光罩 H10 三镜对应背板 H11 主镜对应背板 H12 支撑架1 H13 支撑架2 H14 支撑架3
下载: 导出CSV
表 4 目标变量编号及位置
Table 4. Target variable number and location
编号 代表区域 节点号 目标/℃ ZJ 主镜 12058 20 CJ 次镜 10368 20 SJ 三镜 11244 20 ZDJ 折叠镜 11655 20
下载: 导出CSV
表 5 设计变量的约束
Table 5. Constraints of the designed variables
编号 上边界/mW 下边界/mW H1 1×106 5.6×107 H2 1×106 5.6×107 H3 1×106 5.6×107 H4 1×106 5.6×107 H5 1×106 5.6×107 H6 1×106 5.6×107 H7 1×106 5.6×107 H9 1×106 5.6×107 H10 1×106 5.6×107 H11 1×106 5.6×107 H12 1×106 5.6×107 H13 1×106 5.6×107 H14 1×106 5.6×107
下载: 导出CSV
表 6 整理后的优化结果
Table 6. Optimization results after finishing
编号 优化结果 H1 7 H2 8.3 H3 16 H4 12.3 H5 3 H6 10.5 H7 6 H9 18.2 H10 15.2 H11 15.8 H12 3 H13 3 H14 2.8 总功率 121.1
下载: 导出CSV
表 7 优化前后稳态分析结果对比
Table 7. Results contrast of steady-state analysis before and after optimization
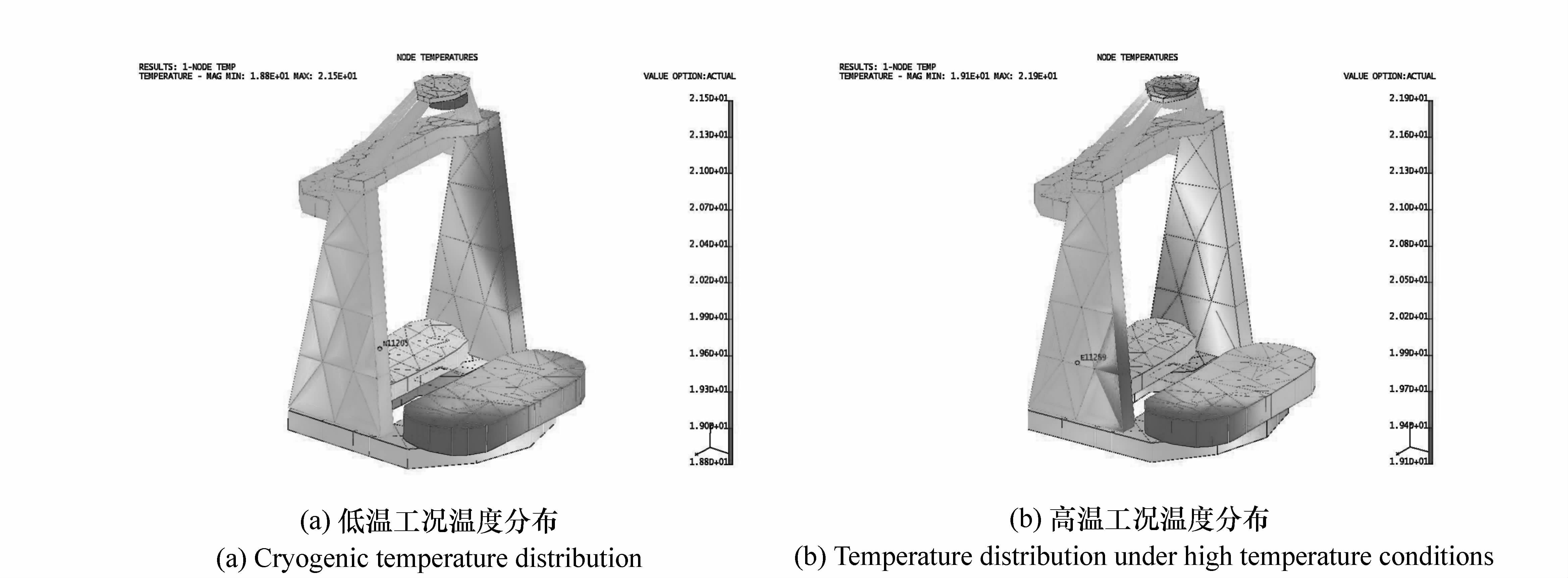
名称 优化前/℃ 优化后/℃ 优化率/% 低温工况 高温工况 低温工况 高温工况 低温工况 高温工况 主镜 18.8~19.5 19.0~19.9 18.8~19.4 19.0~19.6 14.3 33.3 次镜 18.8~19.0 20.0~20.1 18.8~19.0 20.0~20.1 0 0 三镜 20.7~20.9 20.4~20.7 20.7~20.8 20.4~20.6 50 33.3 折叠镜 19.7~20.1 20.3~20.4 19.8~20.1 20.3~20.4 25 0 整机 18.8~20.9 19.1~21.9 18.8~20.8 19.1~20.9 4.76 35.7 总功耗 130 W 121.1 W 6.85%
下载: 导出CSV
-
[1] 卢锷,颜昌翔,吴清文,等.空间光学遥感器环境适应性设计与试验研究[J].中国光学与应用光学,2009,10(5):364-376.LU E,YAN CH X,WU Q W,et al.. Research on adaptability of optical remote sensors in mechanical and space thermal environments[J]. Chinese J. Optics and Applied Optics,2009,10(5):364-376.(in Chinese) [2] 辛宏伟,关英俊,李景林,等.大孔径长条反射镜支撑结构的设计[J].光学 精密工程,2011,19(07):1560-1567.XIN H W,GUAN Y J,LI J L,et al.. Design of support for large aperture rectangular mirror[J]. Opt. Precision Eng.,2011,19(07):1560-1567.(in Chinese) [3] HOLLAND J H. Adaptive of Natural and Artificial Systems[M]. Michigan:University of Michigan Press,1975. [4] GOLDBERG D E. Genetic Algorithm in Search, Optimization and Machine Learning[M]. Reading,Massachusetts:Addison Wesley Longman,Inc,1989:152-154. [5] DAVIEL D. Handbook of Genetic Algorithm[M]. New York:Van Nostrand Reinhold,1991:345-248. [6] DEB K,AGRAWAL S,PRATAP A,et al.. A fast elitist non-dominated sorting genetica algorithm for multi-objective optimization: NSGA-II[C]. Proceedings of the Parallel Problem Solving from Nature VI Conference. Paris France,2000:848-859. [7] 李小玉,郑建华,吴霞,等.基于多目标遗传算法的太阳高纬探测器轨道设计[J].空间科学学报,2011,31(5):653-658.LI X Y,ZHENG J H,WU X,et al.. Sun polar probe trajectory design based on multi-objective genetic algorithm[J]. Chin. J. Space Sci.,2011,31(5):653-658.(in Chinese) [8] VAN VELDHUIZEN D A,LAMONT G B. Multiobjective evolutionary algorithms:analyzing the state-of-theart[J]. Evolutionary Computation,2000,8(2):125-147. [9] 訾克明,吴清文,李泽学,等.空间光学遥感器的热设计实例及仿真分析[J].计算机仿真,2008,25(12):77-80.ZI K M,WU Q W,LI Z X,et al.. Simulation analysis of a space optical remote-sensor's thermal design[J]. Computer Simulation,2008,25(12):77-78.(in Chinese) [10] 杨献伟,吴清文,李书胜,等.空间光学遥感器热设计[J].中国光学,2011,4(2):139-146.YANG X W,WU Q W,LI SH SH,et al. Thermal design of space optical remote sensor[J]. Chinese Optics,2011,4(2):139-146.(in Chinese) [11] 张星祥,任建岳.TMA空间相机性能稳定性的全状态分析与测试[J].红外与激光工程,2014,43(9):2996-3004.ZHANG X X,REN J Y. Analysis and testing on imaging-performance stability of TMA space camera at various states[J]. Infrared and Laser Engineering,2014,43(9):2996-3004.(in Chinese) [12] 任建岳,陈长征,何斌,等.SiC和SiC/Al在TMA空间遥感器中的应用[J].光学 精密工程,2008,16(12):2537-2543.REN J Y,CHEN CH ZH,HE B,et al.. Application of SiC and SiC/Al to TMA optical remote sensor[J]. Opt. Precision Eng.,2008,16(12):2537-2543.(in Chinese) [13] 王书新,李景林,张帆,等.响应面模型的大口径空间反射镜优化[J].红外与激光工程,2013,42(S2):291-297.WANG SH X,LI J L,ZHANG F,et al.. Optimization of large aperture space reflector based on RSM[J]. Infrared and Laser Engineering,2013,42(S2):291-297.(in Chinese) [14] 陈立恒,李延春,罗志涛,等.空间相机大功率CCD器件的热设计与热试验[J].光学 精密工程,2011,19(9):2117-2122.CHEN L H,LI Y CH,LUO ZH T,et al.. Thermal design and testing of CCD for space camera[J]. Opt. Precision Eng.,2011,19(9):2117-2122.(in Chinese) [15] 韩冬,吴清文,陈立恒,等.空间相机热设计中的极端工况确定[J].光学技术,2009,35(6):843-850.HAN D,WU Q W,CHEN L H,et al.. Determination of extreme working conditions for attitude-varied space camera in thermal design[J]. Optical technique,2009,35(6):843-850.(in Chinese) -

 下载:
下载:








计量
- 文章访问数: 2623
- HTML全文浏览量: 933
- PDF下载量: 783
- 被引次数: 0
