


-
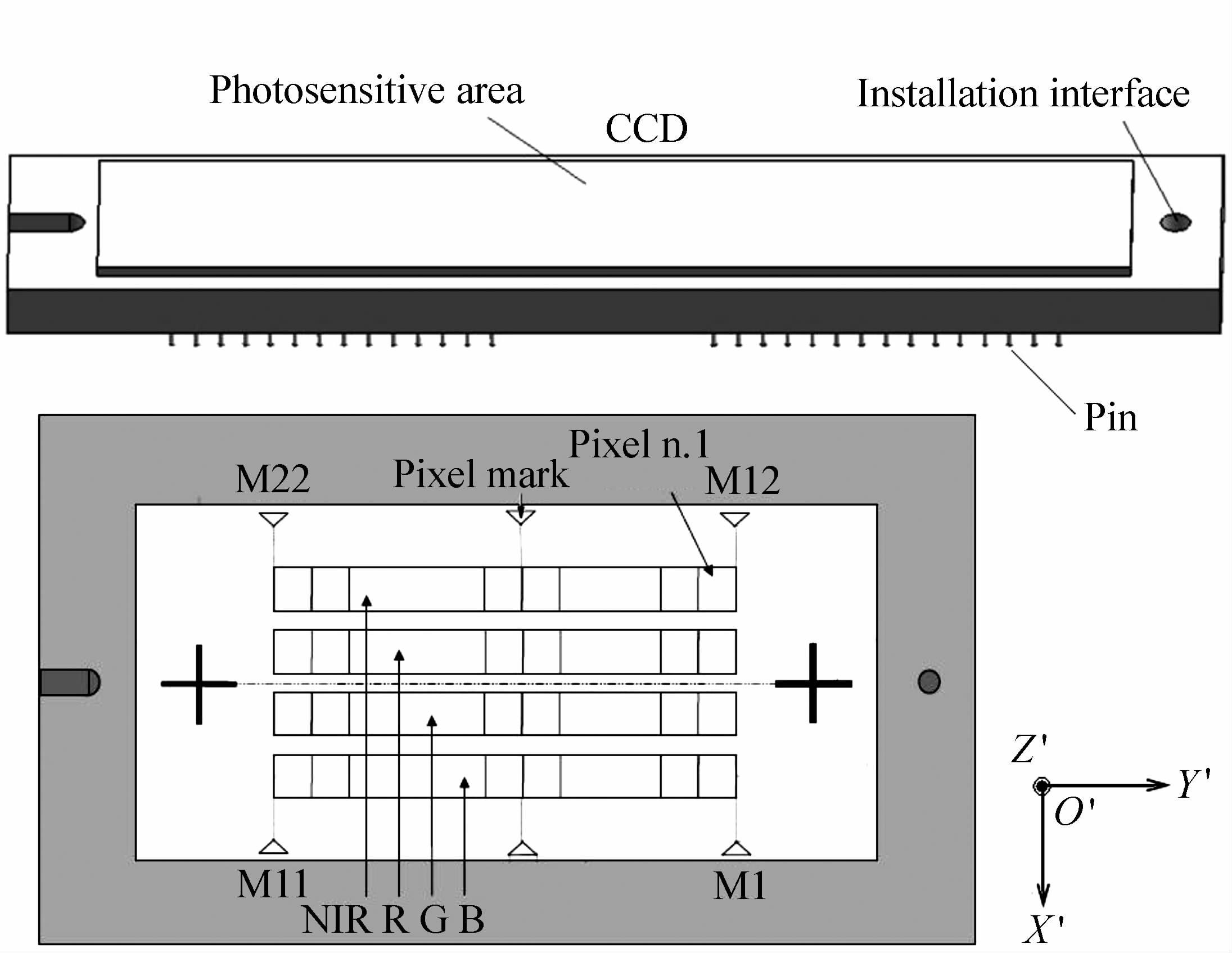
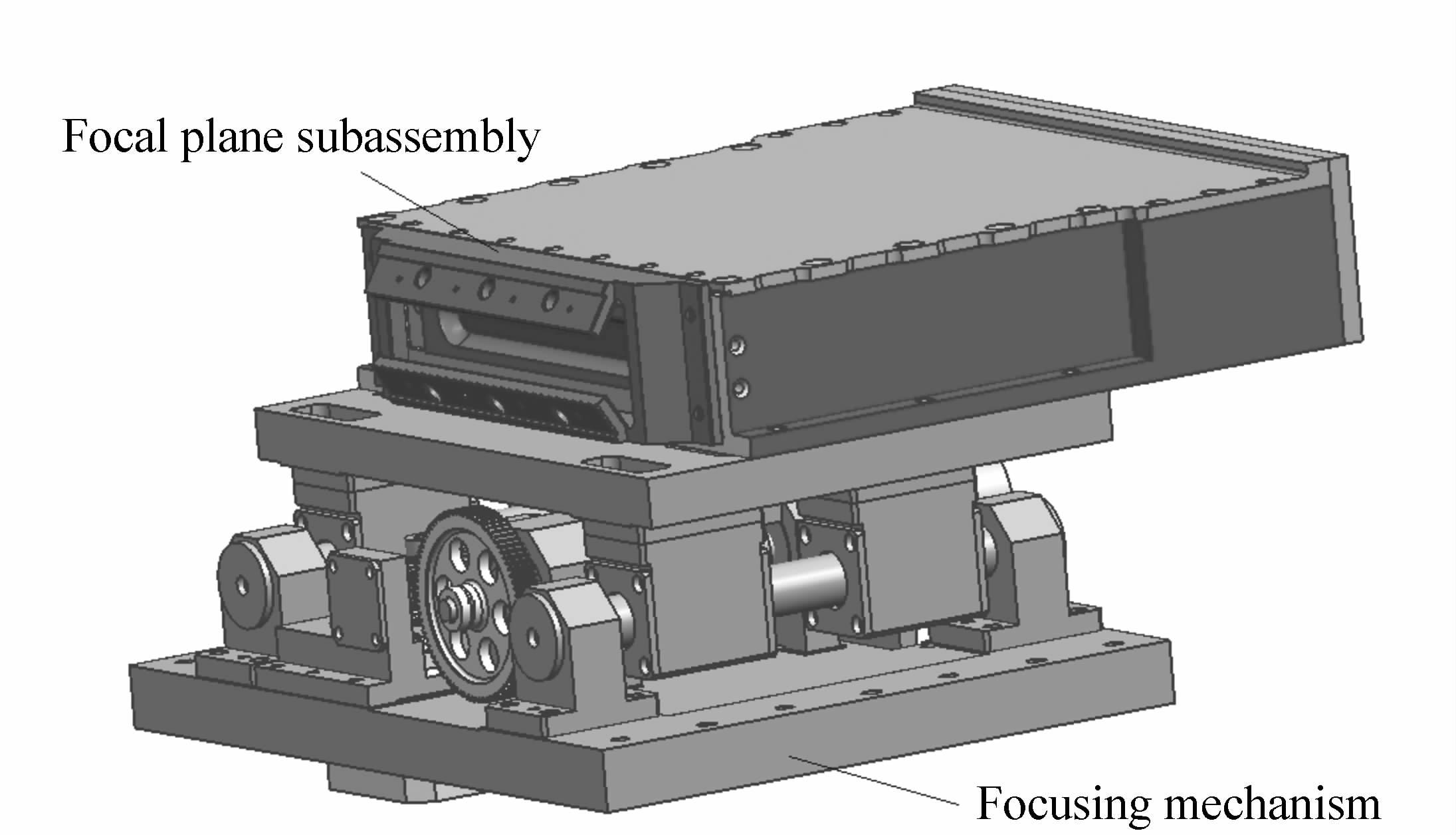
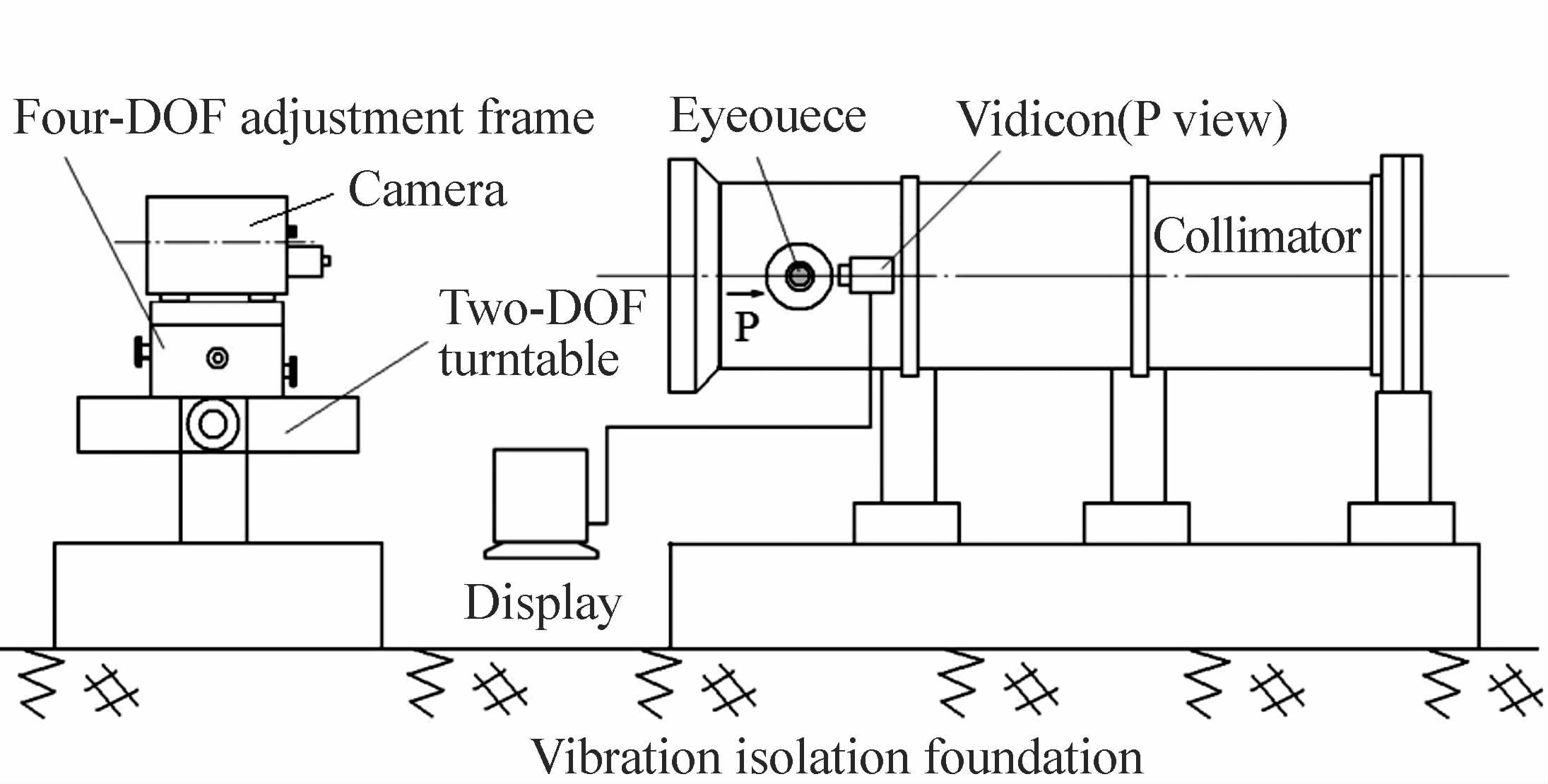
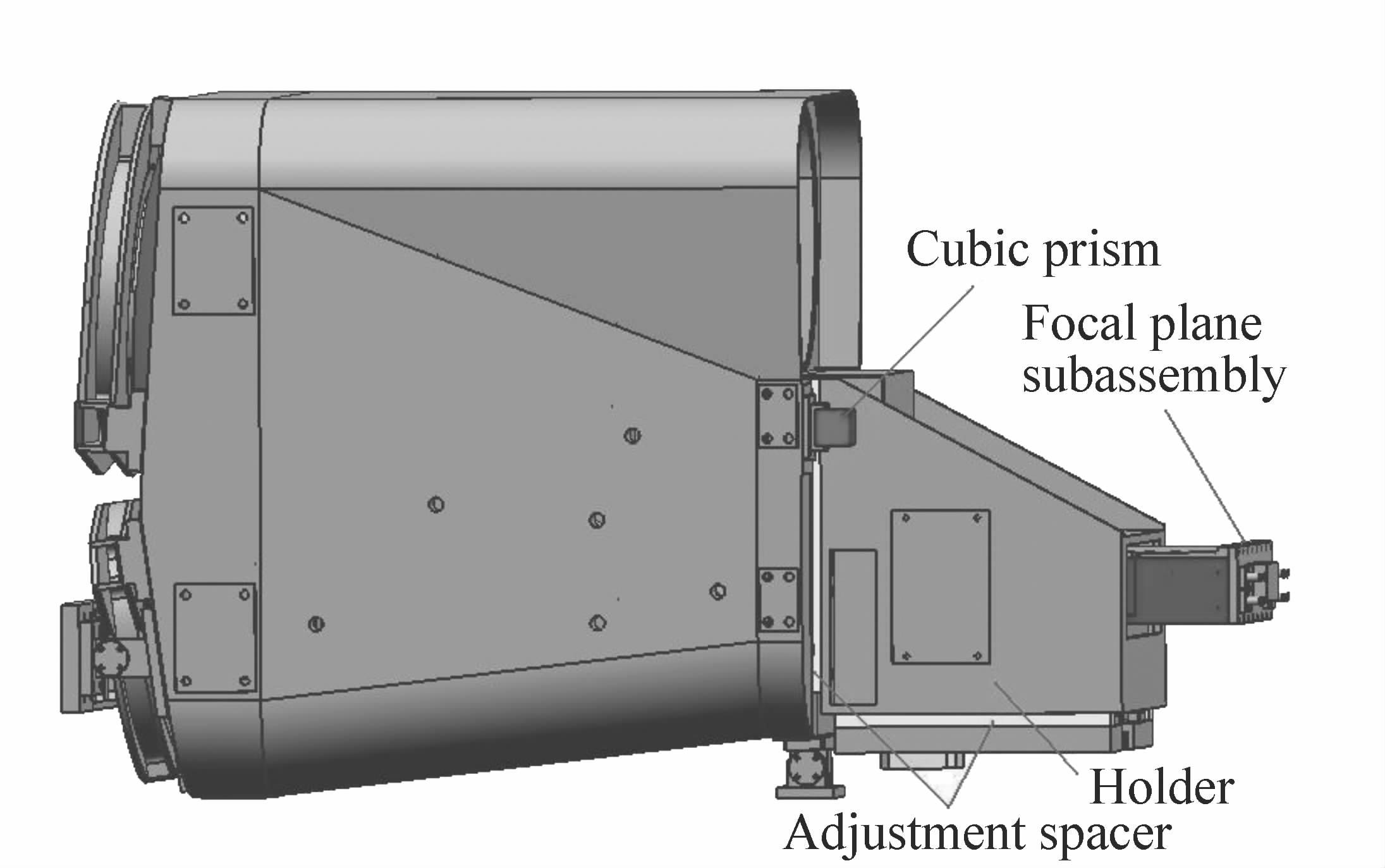
摘要: 针对某离轴多光谱相机焦平面高精度的装调要求,设计了焦平面组件,阐述了装调、检测的仪器设备和方法。首先将焦平面组件安装至镜头,测量并解算出CCD光敏面的角度和位移偏差,接着根据偏差确定调整垫修研量,进行初次修垫并重新安装,然后利用调整工装微调CCD姿态至满足指标要求,调整垫处打销钉定位,最后根据拟合出的最佳焦平面位置再次修研调整垫,利用销钉复位完成装调工作。检测结果表明,相机的CCD光敏面相对于设计焦平面三维角度偏差分别为Δα=-6.7",Δβ=1.9',Δγ=13.2",三维位移偏差分别为Δx=-0.004 mm,Δy=0.006 mm,Δz=-0.070 mm,相机四谱段、全视场MTF优于0.25,满足设计和装调要求。测量和解算误差分析表明,所用的设备与方法能够满足装调精度的要求,可以为此类相机的研制提供一定的技术参考。Abstract: To meet the requirements of high alignment accuracy for a multispectral camera, a focal plane subassembly is designed. Meanwhile, the instruments, fixtures and methods for alignment and measurement are described. First of all, the focal plane subassembly is mounted to the optics so that deflections and shifts of the CCD photosensitive area related to the image plane could be measured and calculated. According to the results given previously, the removal dimension of adjustment spacers is determined and preliminary modification is applied to the spacers. Thereafter, the focal plane subassembly is remounted. Then, the CCD is fine adjusted to its correct orientation and location, and locating pins are embedded into the spacers to hold this adjustment. Finally, based on the fitted optimum focal plane position, spacers are carefully ground and restored. Thus, the alignment is completed. Test results show that, three-dimensional deflections are Δα=-6.7", Δβ=1.9' and Δγ=13.2" respectively; three-dimensional shifts are Δx=-0.004 mm, Δy=0.006 mm and Δz=-0.070 mm respectively. The Modulation Transfer Functions(MTF) corresponding to four spectra and whole field of view are more than 0.25, which can meet the design and alignment specifications. The measurement and calculation error analysis shows that the equipments and methods can meet the precision requirements and provide technique references for homologous cameras.
-
Key words:
- multispectral camera /
- focal plane /
- alignment /
- measurement /
- Modulation Transfer Function(MTF)
-
表 1 焦平面装调偏差实测结果
Table 1. Results of alignment deviations
Parameters Δα Δβ Δγ Δx/mm Δy/mm Δz/mm Deviations -6.7″ 1.9′ 13.2″ -0.004 0.006 -0.070 Requirements ±15″ ±4′ ±30″ ±0.04 ±0.02 ±0.1  下载: 导出CSV
下载: 导出CSV
表 2 相机四谱段MTF检测结果
Table 2. Four-spectral MTFs of the camera
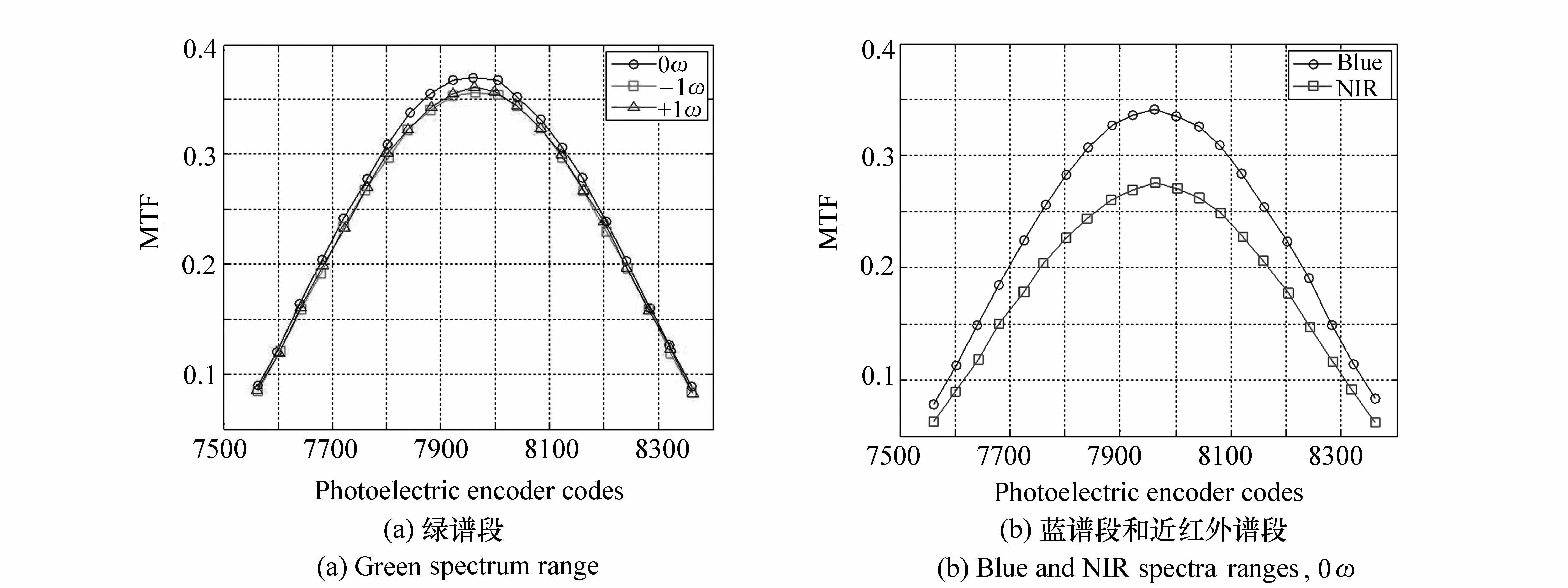
Field MTF(B) MTF(G) MTF(R) MTF(NIR) MTF(Lens) -1ω 0.332 0.355 0.340 0.265 0.681 -0.5ω 0.341 0.366 0.347 0.271 0.705 0ω 0.343 0.370 0.351 0.273 0.712 +0.5ω 0.342 0.368 0.349 0.272 0.709 +1ω 0.334 0.358 0.344 0.268 0.689
下载: 导出CSV
表 3 焦平面装调中的各种误差
Table 3. Errors in focal plane alignment progress
Error Type Value 2-DOF turntable alignment,σ1 0.5″ Leicatheodolite alignment,σ2 0.7″ Camera alignment,σ3 1″ Optical axis orientation,σ4 1.5″ Leicatheodolite measurement,σ5 1.0″ Collimator alignment,σ6 1.0″ Collimator measurement,σ7 0.5″ Focusing mechanism position,σ8 4 codes Least-squarefitting,σ9 6 codes
下载: 导出CSV
-
[1] 武星星,刘金国.大视场多光谱空间相机在轨自动相对辐射校正研究[J].仪器仪表学报,2013,34(1):104-111.WU X X,LIU J G. Research on on-orbit automatic relative radiometric correction of multi-spectral space camera with large field of view[J]. Chinese J. Scientific Instrument,2013,34(1):104-111.(in Chinese) [2] JOHN W F. The QuickBird telescope:the reality of large, high-quality, commercial space optics[J]. SPIE,1999,3779:22-30. [3] BICKNELL W E,DIGENIS C J,FORMAN S E. EO-1 advanced land imager[J]. SPIE,1999,3750:80-88. [4] SHIMODA H. Japanese earth observation programs[J]. SPIE,1999,3870:37-48. [5] 曲宏松,金光,张叶."NextView 计划"与光学遥感卫星的发展趋势[J].中国光学与应用光学,2009,2(6):27-36.QU H S,JIN G,ZHANG Y. NextView program and progress in optical remote sensing satellites[J]. Chinese J. Optics and Applied Optics,2009,2(6):27-36.(in Chinese) [6] 徐伟,朴永杰.从Pleiades剖析新一代高性能小卫星技术发展[J].中国光学,2013,6(1):9-19.XU W,PIAO Y J. Analysis of new generation high-performance small satellite technology based on the Pleiades[J]. Chinese Optics,2013,6(1):9-19.(in Chinese) [7] 焦斌亮,王朝晖,林可祥,等.星载多光谱CCD相机研究[J].仪器仪表学报,2004,25(2):146-151.JIAO B L,WANG Z H,LIN K X,et al.. A multispectral CCD camera for satellite use[J]. Chinese J. Scientific Instrument,2004,25(2):146-151.(in Chinese) [8] 刘姜伟,黄海乐,李五.天绘一号卫星高分辨、多光谱相机与三线阵正视相机夹角在轨标定方法研究[J].红外与激光工程,2015,44(2):662-667.LIU J W,HUANG H L,LI W. Research on method for the in-flight calibration of mapping satellite-1 high-resolution camera, multispectral camera and three-line-array nadir camera's intersection angle[J]. Infrared and Laser Engineering,2015,44(2):662-667.(in Chinese) [9] 蒋永华,张过,唐新民,等.资源三号测绘卫星多光谱影像高精度谱段配准[J].测绘学报,2013,12(6):884-890.JIANG Y H,ZHANG G,TANG X M,et al.. Research on high accuracy band-to-band registration method of ZY-3 multispectral image[J]. Acta Geodaetica et Cartographica Sinica,2013,12(6):884-890.(in Chinese) [10] 贾福娟,吴雁林,黄颖,等.环境减灾_1A_1B卫星宽覆盖多光谱CCD相机技术[J].航天器工程,2009,18(6):37-42.JIA F J,WU Y L,HUANG Y,et al.. Design and on-orbit application of CCD camera on HJ-1A/1B satellites[J]. Spacecraft Engineering,2009,18(6): 37-42.(in Chinese) [11] 范斌,蔡伟军,张孝弘,等.资源三号卫星多光谱相机技术[J].航天返回与遥感,2012,33(3):75-84.FAN B,CAI W J,ZHANG X H,et al.. Technology of the multi-spectral camera of ZY-3 satellite[J]. Spacecraft Recovery & Remote Sensing,2012,33(3):75-84.(in Chinese) [12] 巩盾.空间遥感测绘光学系统研究综述[J].中国光学,2015,8(5):714-724.GONG D. Review on mapping space remote sensor optical system[J]. Chinese Optics,2015,8(5):714-724.(in Chinese) [13] 沙巍,陈长征,许艳军,等.离轴三反空间相机主三镜共基准一体化结构[J].光学 精密工程,2015:23(6):1612-1619.SHA W,CHEN CH ZH,XU Y J,et al.. Integrated primary and tertiary mirror components from common base line of off-axis TMA space camera[J]. Opt. Precision Eng.,2015: 23(6):1612-1619.(in Chinese) [14] 孙继明,郭疆,邵明东,等.大视场时间延迟积分CCD遥感相机的精密定焦[J].光学 精密工程,2014,22(3):602-607.SUN J M,GUO J,SHAO M D,et al.. Precise focusing for TDICCD camera with wide field of view[J]. Opt. Precision Eng.,2014,22(3):602-607.(in Chinese) [15] 吴国栋.一种三线阵测绘相机CCD像面的装调方法[J].仪器仪表学报,2009,30(11):2395-2398.WU G D. Alignment method of CCD image plane for three-line array mapping camera[J]. Chinese J. Scientific Instrument,2009,30(11):2395-2398.(in Chinese) [16] 许志涛,刘金国,龙科慧,等.高分辨率空间相机调焦机构精度分析[J].光学学报,2013,33(7):0728001.XU ZH T,LIU J G,LONG K H,et al.. Accuracy analysis of focusing mechanism of high resolution space camera[J]. Acta Optica Sinica,2013,33(7):0728001.(in Chinese) [17] 马宏,王金波.误差理论与仪器精度[M].北京:兵器工业出版社,2007:84-87.MA H,WANG J B. Error Theory and Precision of Instrument[M]. Beijing:Weapon Industry Press,2007:84-87.(in Chinese) -

 下载:
下载:





图(12) / 表(3)
计量
- 文章访问数: 2270
- HTML全文浏览量: 519
- PDF下载量: 998
- 被引次数: 0
