


-
摘要: 为了提高MEMS陀螺输出角速度的精度,采用Allan分析法以及Kalman滤波算法对MEMS陀螺仪进行随机误差分析和补偿。由Allan方差分析陀螺的输出数据,对Allan方差进行最小二乘法拟合,得到各项随机噪声的定量评价指标;对陀螺的输出数据使用AR模型进行数学建模,采用AIC准则确定了AR模型的阶次,建立了陀螺零漂数据的离散时间表达式;在AR模型所建立的陀螺随机误差模型的基础上,设计了Kalman滤波器,对陀螺输出数据使用Kalman算法进行了滤波处理,对陀螺的随机误差进行了补偿;通过Allan方差对Kalman算法对陀螺随机误差的补偿效果进行分析。实验结果表明:角速率随机游走Kalman滤波前为0.1487°/$\sqrt{h}$,Kalman滤波补偿后为0.0041°/$\sqrt{h}$,通过补偿可减小97.24%的角速率随机游走误差;零偏不稳定性Kalman滤波前为1.9408°/h,Kalman滤波补偿后为0.0542°/h,通过补偿可减小97.21%的零偏不稳定性误差;速率随机游走Kalman滤波前为2.6985°/h$\frac{3}{2}$,Kalman滤波补偿后为0.3343°/h$\frac{3}{2}$,通过补偿可减小87.61%的速率随机游走误差。Kalman滤波适用于MEMS陀螺的滤波处理,可有效降低陀螺的随机误差。Abstract: In order to improve the accuracy of MEMS gyro angular velocity, Allan analysis and Kalman filter algorithm are used to analyze and compensate the random error of MEMS gyroscope. First, Allan variance is used to analyze the gyro output data, and least squares algorithm is used to fit Allan variance. A quantitative evaluation of the random noise is obtained. Then, AR model is applied to set up a mathematical model of gyro output data, and AIC criterion is used to determine the order of the AR model, establishing a discrete time expression of gyro drift data. After that, the Kalman filter is designed based on gyro random error model established by AR model, and Kalman filtering algorithm is used for filtering processing of gyro output data. The random error of gyro can be compensated. Finally, the compensation effect of Kalman algorithm for the gyro random error is analyzed through Allan variance. Experimental results indicate that after compensation of Kalman filter the angular random walk is reduced by 97.24% from 0.148 7°/$\sqrt{h}$ to 0.004 1°/$\sqrt{h}$, the bias instability is reduced by 97.21% from 1.940 8°/h to 0.0542°/h, and rate random walk is reduced by 87.61% from 2.6985°/h$\frac{3}{2}$ to 0.3343°/h$\frac{3}{2}$. Kalman filter can be well applied to filtering process of MEMS gyroscope, and it can effectively reduce the gyro random error.
-
Key words:
- MEMS gyrocope /
- random error /
- Allan variance /
- AR model /
- Kalman filter
-

图 1 陀螺随机误差辨识典型Allan方差曲线
Figure 1. Typical Allan variance curve of Gyro random error identification

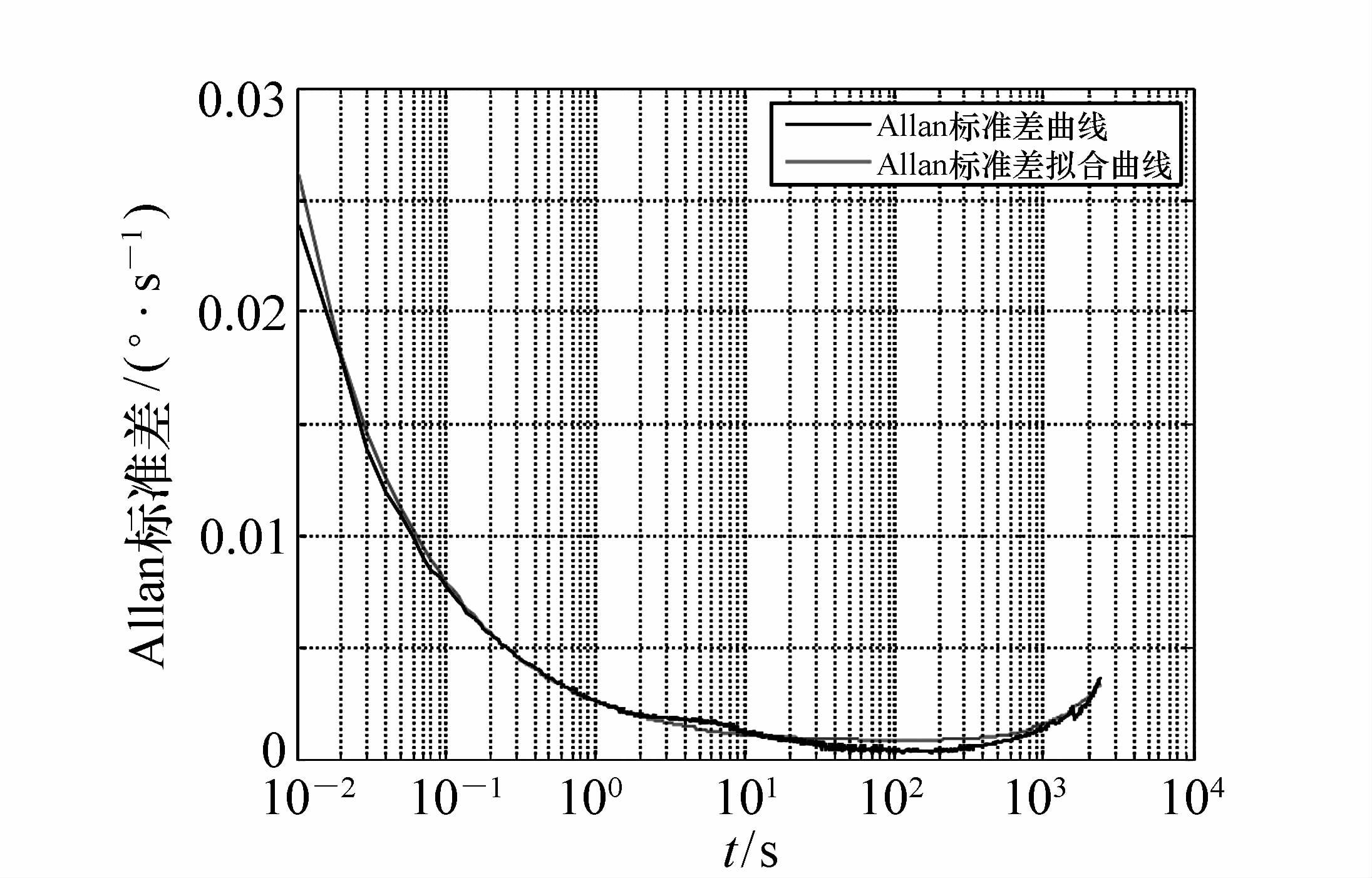
图 5 MSG1100D的Allan标准差及其拟合曲线
Figure 5. MSG1100D′s Allan standard deviation and it′s fitting curve

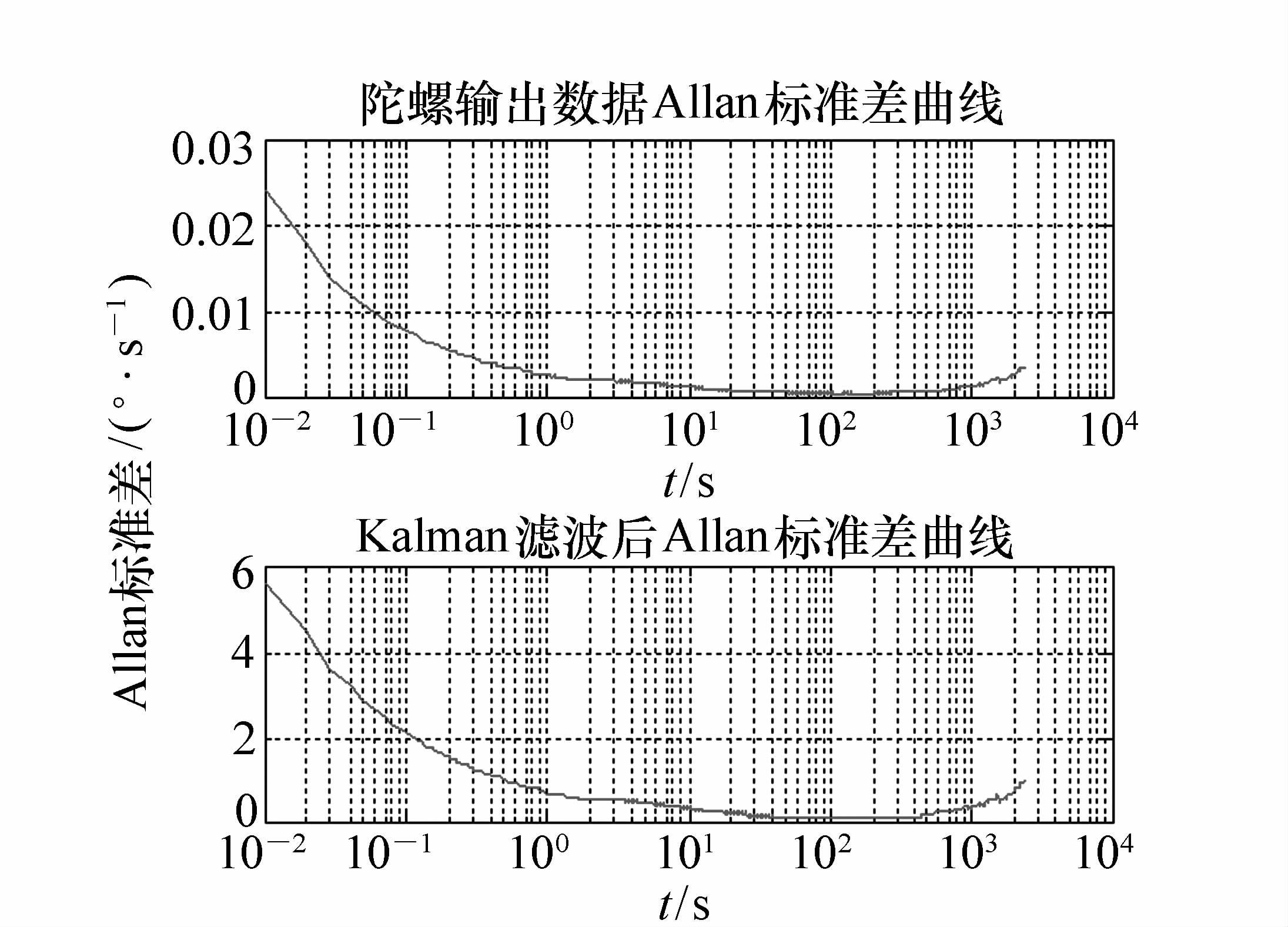
图 7 Kalman滤波前后Allan标准差对比曲线
Figure 7. Allan standard deviation contrast curves before and after Kalman filtering

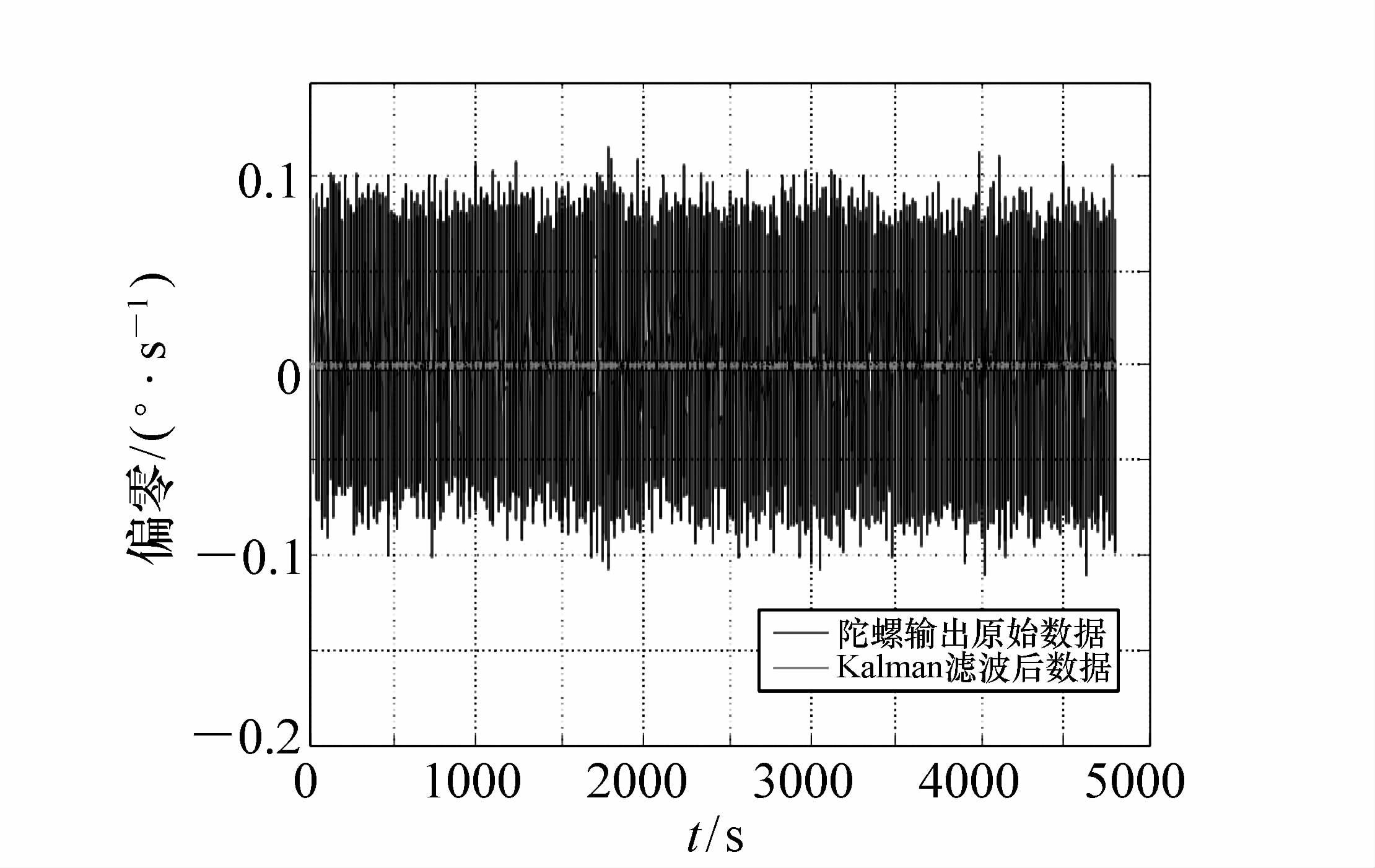
图 8 动态下MEMS陀螺随机误差Kalman滤波效果图
Figure 8. Kalman filtering effect of MEMS gyro random error under dynamic condition
表 1 MSG1100D陀螺的各项随机误差统计表
Table 1. Random error statistics of MSG1100D gyro
随机误差项 结果 量化噪声Q/urad 3.643 1×10-5 角随机游走N/(°/ $\sqrt{h}$ ) 0.148 7 零偏不稳定性B/(°/h) 1.940 8 速率随机游走K/(°/h $\frac{3}{2}$ ) 2.698 5 速率斜坡R/(°/h2) 24.167 9  下载: 导出CSV
下载: 导出CSV
表 2 AR模型拟合系数
Table 2. Fitting coefficients of AR model
Model φ1 φ2 φ3 AIC AR(1) 0.123 5 0 0 -7.341 6 AR(2) 0.123 7 0.001 9 0 -7.341 6 AR(3) 0.124 0.017 76 0.128 1 -7.358 1
下载: 导出CSV
表 3 滤波前后数据均值和方差对比
Table 3. Comparison of mean values and variance before and after filtering
参数 均值/(°/s) 方差/(°/s)2 滤波前 7×10-3 6.087 8×10-4 滤波后 1.952 4×10-4 3.737 3×10-7
下载: 导出CSV
表 4 Kalman滤波后陀螺的各项随机误差统计表
Table 4. Statistics of gyro random errors after Kalman filter
随机误差项 滤波后结果 随机误差降低百分比/% 量化噪声Q/urad 4.1×10-6 88.75 角随机游走N/(°/ $\sqrt{h}$ ) 0.0041 97.24 零偏不稳定性B/(°/h) 0.054 2 97.21 速率随机游走K/(°/h $\frac{3}{2}$ ) 0.334 3 87.61 速率斜坡R/(°/h2) 6.156 3 74.53
下载: 导出CSV
-
[1] 查颖,周长省,鞠玉涛.制导火箭弹MEMS陀螺仪信号处理仿真[J].计算机仿真,2013,30(12):70-73.ZHA Y,ZHOU CH SH,JU Y T. Simulation of signal processing for MEMS gyroscope for rockets[J]. Computer Simulation,2013,30(12):70-73.(in Chinese) [2] 赵阳,裘安萍,施芹,等.硅微陀螺仪零偏稳定性的优化[J].光学 精密工程,2014,22(9):2381-2386.ZHAO Y,QIU A P,SHI Q,et al.. Optimization of bias stability for silicon microgyroscope[J]. Opt. Precision Eng.,2014,22(9):2381-2386.(in Chinese) [3] 贾方秀,裘安萍,施芹,等.硅微振动陀螺仪设计与性能测试[J].光学 精密工程,2013,21(5):1272-1278.JIA F X,QIU A P,SHI Q,et al.. Design and experiment of micro machined vibratory gyroscope[J]. Opt. Precision Eng.,2013,21(5):1272-1278.(in Chinese) [4] 沈军,缪玲娟,吴军伟,等.基于RBF神经网络的光纤陀螺启动补偿及应用[J].红外与激光工程,2013,42(1):119-123.SHEN J,MIAO L J,WU J W,et al.. Application and compensation for startup phase of FOG based on RBF neural network[J]. Infrared and Laser Engineering,2013,42(1):119-123.(in Chinese) [5] ZOU X F,LU X Y. Estimate method of MEMS gyroscope performance based on allan variance[J]. MEMS Device & Technology,2010,8(47):490-498. [6] 赵曦晶,刘光斌,汪立新,等.光纤陀螺温度漂移自适应网络模糊推理补偿[J].红外与激光工程,2014,43(3):791-793.ZHAO X J,LIU G B,WANG L X,et al.. Compensation for FOG temperature drift based on adaptive neurofuzzy inference[J]. Infrared and Laser Engineering,2014,43(3):791-793.(in Chinese) [7] 黄磊.光纤陀螺随机噪声的建模与滤波[J].弹箭与制导学报,2013,33(6):27-29.HUANG L. Modeling and filtering methods of FOG random noise[J]. J. Projectiles, Rockets, Missiles and Guidance,2013,33(6):27-29.(in Chinese) [8] 于丽杰,高宗余.MEMS传感器随机误差分析[J].传感器与微系统,2012,31(3):63-65.YU L J,GAO Z Y. Stochastic error analysis on MEMS sensor[J]. Transducer and Microsystem Technologies,2012,31(3):63-65.(in Chinese) [9] 张宇辛,卞鸿巍,朱涛.MEMS陀螺随机误差的实验测试分析[J].舰船电子工程,2013,33(5):140-142.ZHANG Y X,BIAN H W,ZHU T. Testing and analysis for stochastic error of MEMS gyroscopes[J]. Ship Electronic Engineering,2013,33(5):140-142.(in Chinese) [10] TANG J H,FU Z X,DENG ZH L. Identification method for RLG random errors based on allan variance and equivalent theorem[J]. Chinese J. Aeronautics,2009,4(22):273-276. [11] 耿丹,许光明.小型激光陀螺随机误差的Allan方差分析[J].光学与光电技术,2013,11(1):12-13.GENG D,XU G M. Allan variance analysis of small laser gyro random error[J]. Optics & Optoelectronic Technology,2013,11(1):12-13.(in Chinese) [12] 陈晨,赵文宏,徐慧鑫,等.基于卡尔曼滤波的MEMS陀螺仪漂移补偿[J].机电工程,2013,30(3):311-313.CHEN C,ZHAO W H,XU H X,et al.. Compensation of MEMS gyroscope error based on Kalman filter[J]. J. Mechanical & Electrical Engineering,2013,30(3):311-313.( in Chinese) [13] 陈旭光,杨平,陈意.MEMS陀螺仪零位误差分析与处理[J].传感技术学报,2012,25(5):628-631.CHEN X G,YANG P,CHEN Y. Analysis and processing on zero position error of MEMS gyroscope[J]. Chinese J. Sensors and Actuators,2012,25(5):628-631.( in Chinese) [14] 吴峰.两轴平台稳定系统中MEMS陀螺误差建模与分析[D].天津:天津大学,2012:41-56.WU F. Error modeling and analysis of MEMS gyroscope in the two-axis platform stabilization system[D]. Tianjin:Tianjin University,2012:41-56.(in Chinese) [15] DIAO ZH L,QUAN H Y,LAN L D,et al.. Analysis and compensation of MEMS gyroscope drift[C]. 2013 Seventh International Conference on Sensing Technology,IEEE,2013:592-595. [16] LIANG X,CHENG Y J,HONG L CH,et al.. A novel Kalman filter for combining outputs of MEMS gyroscope array[J]. Measurement,2012,3(45):745 750. [17] 林旻序,汪永阳,戴明,等.线性加速度计在压电陀螺卡尔曼滤波技术中的应用[J].中国光学,2011,4(6):600-604.LIN M X,WANG Y Y,DAI M,et al.. Application of linear accelerometer to Kalman filter for piezoelectric gyro[J]. Chinese Optics,2011,4(6):600-604.(in Chinese) [18] DONG H SH,GAMINI D. Convergence and consistency analysis for extended Kalman filter based SLAM[J]. Robotics, IEEE Transactions on,2007,23(5):1036-1049. -

 下载:
下载:




计量
- 文章访问数: 3707
- HTML全文浏览量: 1424
- PDF下载量: 1335
- 被引次数: 0
