


-
摘要: 针对共光路菲索型动态干涉仪采集到的4幅条纹图的空间一致性问题,本文提出一种新的条纹图配准思路,将条纹图与图像配准在关联度上人为分开,搭建了专用的图像配准装置,避免将条纹与十字丝标志点混在一幅图像内而影响干涉仪的测量精度。首先通过本文搭建的条纹图配准装置对4台CMOS相机进行物理配准,然后利用整体最小二乘法对采集到的同一十字丝刻划板图像进行十字丝提取、交点计算以及旋转量计算,实现共光路菲索型动态干涉仪条纹图像的点点对应。最后通过试验对比验证,证明了本文算法的配准精度优于模板重心法的配准结果,互相关度达到96%以上。Abstract: To solve the space coherence of four inference fringe images by dynamic interferometer with common light paths, we propose a new notion of inference fringe image registration. We detach the conjunction between the inference fringe image and the image registration, and erect the equipment for inference fringe image registration, avoiding the confusion between the inference fringe and the cross wire which can influence the measure precision of dynamic interferometer. First, we realize the physical registration of four CMOS cameras using the equipment for inference fringe image registration. Then, we go along the image registration for the four cross wire images of the depict board by cross wire extraction, intersection point caculation and rotution amount caculation using total least square method, and realize the parallelism between the pix and pix of the dynamic interferometer with common light paths. Last, experimental results show that the proposed registration algorithm can improve the accuracy of registration, which is superior to that of the method of bary center. The method proposed in this paper can achieve the cross-correlation value of over 96%.
-

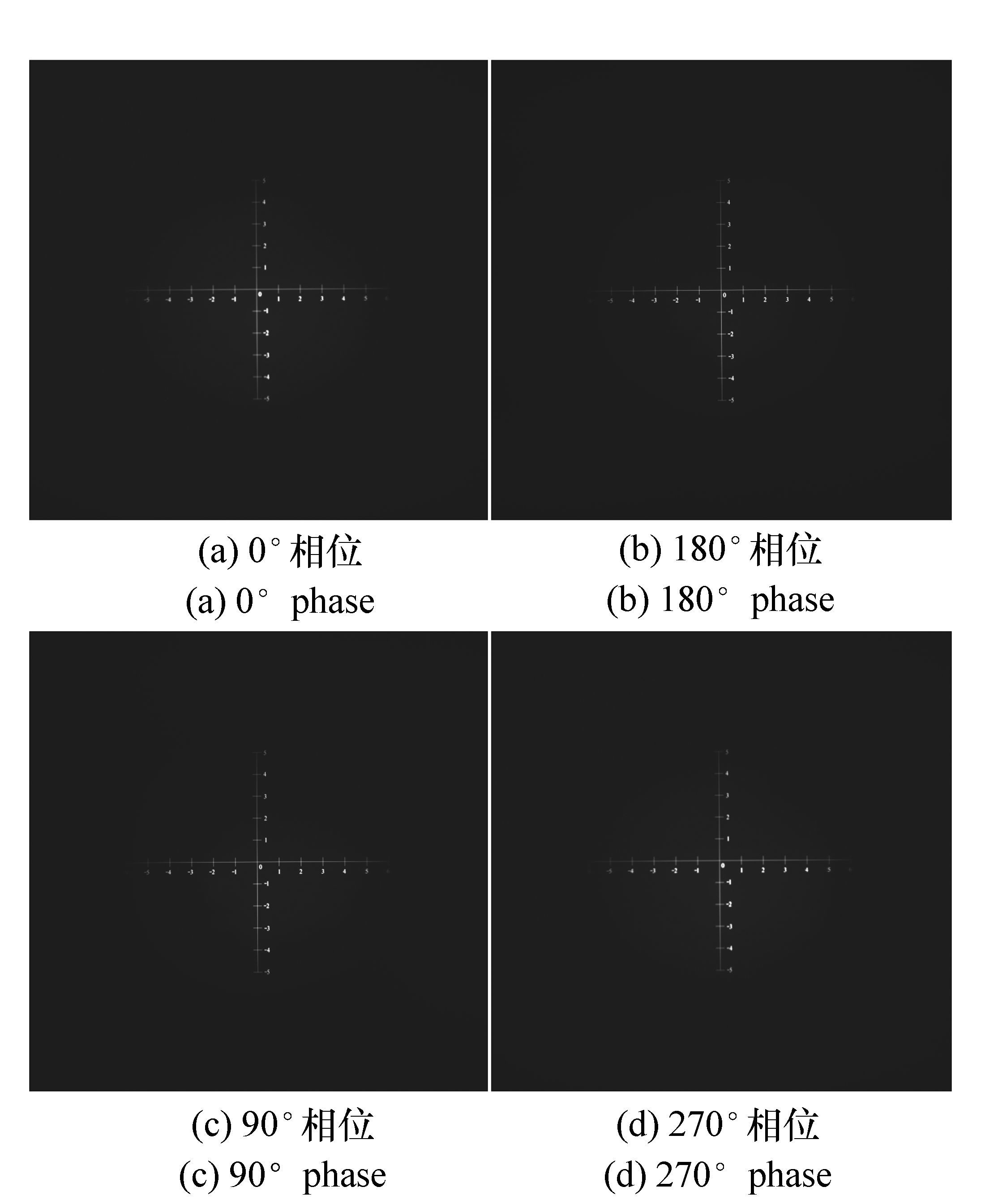
图 2 调整前刻划板采集图
Figure 2. Collecting picture of depiction board before regulating depiction

图 3 预处理结果及十字丝放大显示图
Figure 3. Result of pretreatment and the enlarged image of cross wire

图 4 整体最小二乘法配准后刻划板图
Figure 4. Depiction board picture after registration using total least square

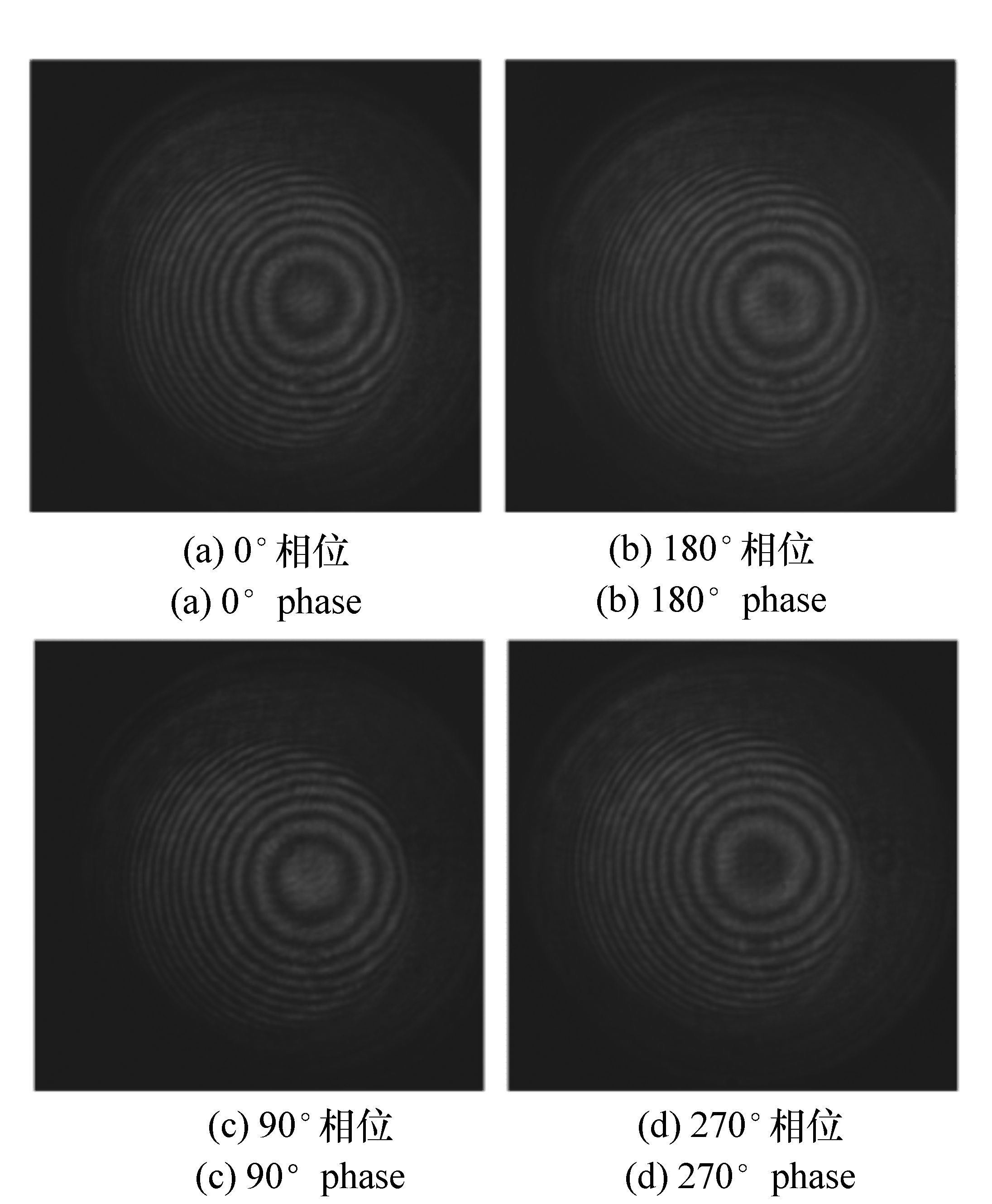
图 5 按配准得到的公式变换后的条纹图
Figure 5. Fringe picture of transform using the registration result
表 1 整体最小二乘法得到配准结果
Table 1. Registration result using total least square
图像序列 十字丝中心点 平移量 直线斜率 旋转量/(°) 0相位 (1 030,1 045) (6,21) 0.013 6 0.779 2 180相位 (1 016,1 021) (-8,-3) 0.001 3 0.074 5 90相位 (1 023,1 025) (-1,1) 0.000 8 0.045 8 270相位 (1 019,1 027) (-5,3) 0.001 1 0.063 0  下载: 导出CSV
下载: 导出CSV
表 2 互相关度计算结果
Table 2. Result of cross-correlation value
相机标号 配准前 整体最小二乘法 重心法 (1,2) 0.15 0.96 0.83 (1,3) 0.17 0.97 0.84 (1,4) 0.14 0.97 0.82 (2,3) 0.12 0.98 0.92 (2,4) 0.10 0.96 0.91 (3,4) 0.15 0.97 0.90
下载: 导出CSV
-
[1] 王永红,冯家亚,王鑫,等.基于狭缝光阑的剪切散斑干涉动态测量[J].光学精密工程,2015,23(3):645-651. doi: 10.3788/OPE.WANG Y H,FENG J Y,WANG X,et al.. Shearing speckle interferometry based on slit aperture for dynamic measurement[J]. Opt. Precision Eng.,2015,23(3):645-651.(in Chinese) doi: 10.3788/OPE. [2] 王永红,李骏睿,孙建飞,等.散斑干涉相位条纹图的频域滤波处理[J].中国光学,2013,7(3):389-395. http://www.chineseoptics.net.cn/CN/abstract/abstract9139.shtmlWANG Y H,LI J R,Sun J F,et al.. Frequency domain filtering for phase fringe patterns of digital speckle pattern interfeinmetry[J]. Chine Optics,2013,7(3):389-395.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9139.shtml [3] 左芬.同步移相干涉测量的抗振技术研究[D].南京:南京理工大学,2008.ZUO F. Study on the simultaneous phase-shifting anti-vibrational interferometry[D]. Nanjing:Nanjing University of Science and Technology,2008.(in Chinese) [4] 徐晨.动态干涉测量技术与应用研究[D].南京:南京理工大学,2009.XU C. Study of dynamic interferometry technology and application[D]. Nanjing:Nanjing University of Science and Technology,2009.(in Chinese) [5] 田枫、白福忠、吴亚琴,等.基于统计分析方法的同步移相干涉图位置配准[J].光学学报,2014,6:0626001.1-7. http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201406040.htmTIAN F,BAI F ZH,WU Y Q,et al. Position registration for simultaneous phase-shifting interferograms based on statistical analysis method[J]. Acta Optica Sinica,2014,6:0626001.1-7.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201406040.htm [6] KAUFMANN G H,GALIZZI G E. Phase measurement in temporal speckle pattern interferometry:comparison between the phase-shifting and the Fourier transform methods[J]. Applied Optics,2002,41(34):7254-7263. doi: 10.1364/AO.41.007254 [7] WANG F,PENG X S,LIU S Y. The method to filter the noise in the speckle fringe pattern based on spin filtering[J]. Strong Laser and Ion Beam,2009,21(z):230-234. [8] WANG M X,FANG Y,HU H P. The independent component analysis method based on two-dimensional wavelet transform and its application in image separation[J]. Electronics and Information J.,2006,28(3):471-475. [9] 武迎春,曹益平,肖焱山.任意相移最小二乘法迭代的在线三维检测[J].光学精密工程,2014,22(5):1347-1353. doi: 10.3788/OPE.WU Y CH,CAO Y P,XIAO Y SH. On-line three-dimensional inspection using randomly phase-shifting fringe based on least-square iteration[J]. Opt. Precision Eng.,2014,22(5):1347-1353.(in Chinese) doi: 10.3788/OPE. [10] 丁克良,沈云中,欧吉坤.整体最小二乘法直线拟合[J].辽宁工程技术大学学报(自然科学版),2010,19(1):44-47. http://www.cnki.com.cn/Article/CJFDTOTAL-FXKY201001014.htmDING K L,SHENG Y ZH,OU J K. Methods of line-fitting based on total least-squares[J]. J. Liaoning Technical University(Natural Science),2010,19(1):44-47.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-FXKY201001014.htm [11] 张海华,刘春.顾及粗差的混合最小二乘平差实验分析[J].现代测绘,2010,5:8-12. http://www.cnki.com.cn/Article/CJFDTOTAL-JSCH201005002.htmZHANG H H,LIU CH. Mixed total least squares and least squares adjustment experimental anal ysis with gross error considered[J]. Modern Surveying and Mapping,2010,5:8-12.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JSCH201005002.htm [12] 郭交,李真芳,保铮.基于相位梯度的干涉条纹图配准方法[J].西安电子科技大学学报(自然科学版),2011,1:110-116. http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201101019.htmGUO J,LI ZH F,BAO ZH. Coregistration of multiple-pass interferogram of a single-baseline InSAR system based on phase gradients[J]. J. Xidian University,2011,1:110-116.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-XDKD201101019.htm [13] 田枫.自参考干涉波前探测中光瞳形状问题研究[D].内蒙古工业大学,2014. http://cdmd.cnki.com.cn/Article/CDMD-10128-1015532128.htmTIAN F. Research on pupil shape problem in self-referencing interferometer wavefrom detection[D]. Inner Mongolia University of technology,2014.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10128-1015532128.htm [14] WU S,HE X,YANG L. Enlarging the angle of view in Michelson interferometer based stereography by embedding a 4f system[J]. Appl. Opt.,2011,50(21):1669-1705. http://cn.bing.com/academic/profile?id=2018897626&encoded=0&v=paper_preview&mkt=zh-cn [15] 王新华,黄玮,欧阳继红.多探测器拼接成像系统实时图像配准[J].中国光学,2015,8(2):211-219. doi: 10.3788/co.WANG X H,HUANG W,OUYANG J H. Real-time image registration of the multi-detectors mosaic imaging system[J]. Chine Optics,2015,8(2):211-219.(in Chinese) doi: 10.3788/co. -

 下载:
下载:





计量
- 文章访问数: 2677
- HTML全文浏览量: 967
- PDF下载量: 777
- 被引次数: 0
