2016年 9卷 第6期

2016, 9(6): 615-624.
doi: 10.3788/CO.20160906.0615
 摘要
摘要 HTML全文
HTML全文 PDF 2511KB
PDF 2511KB
摘要:
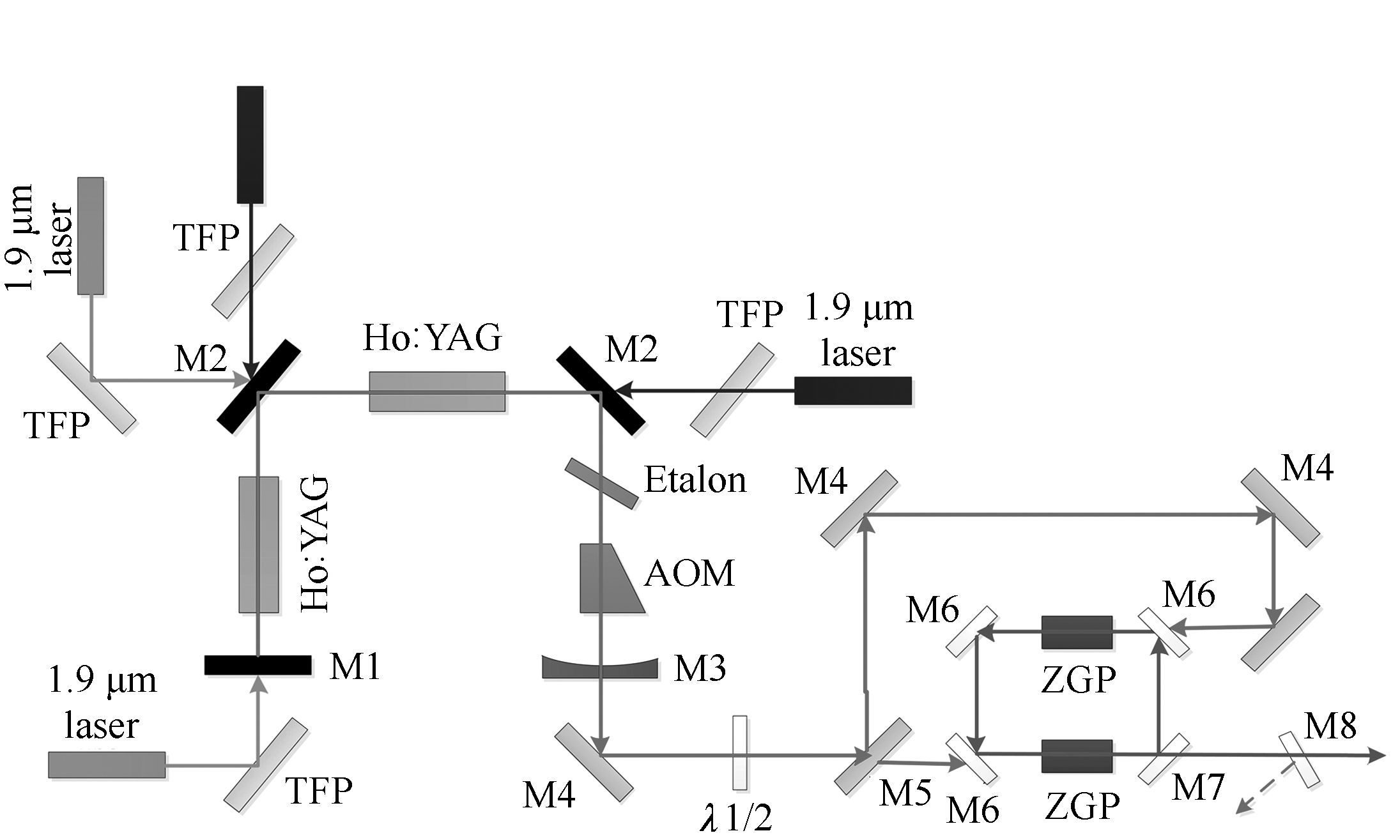
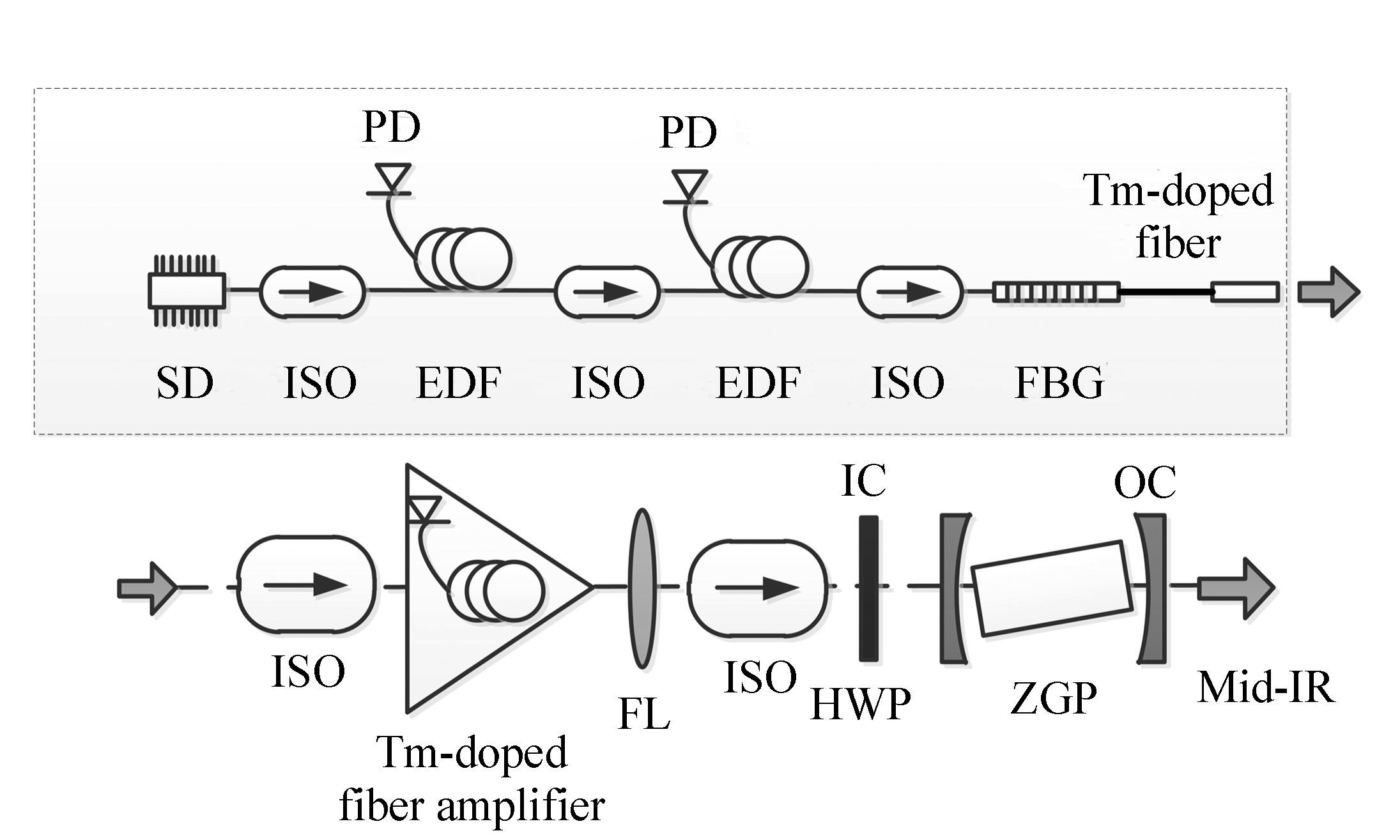
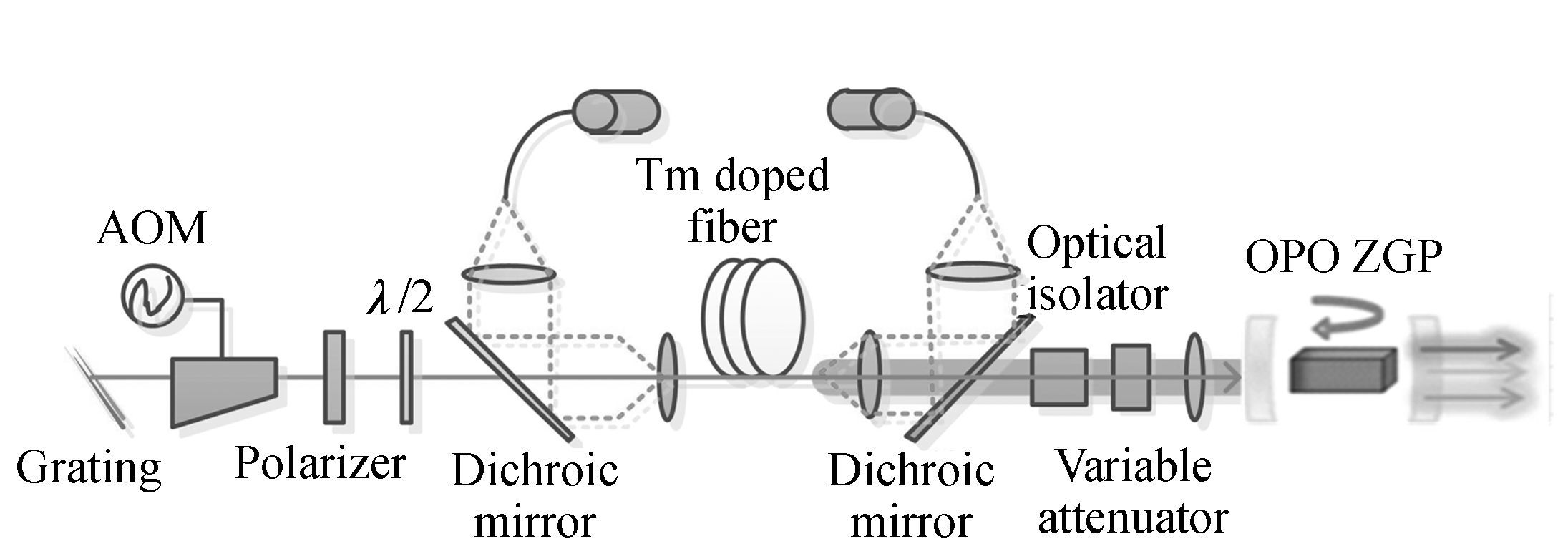
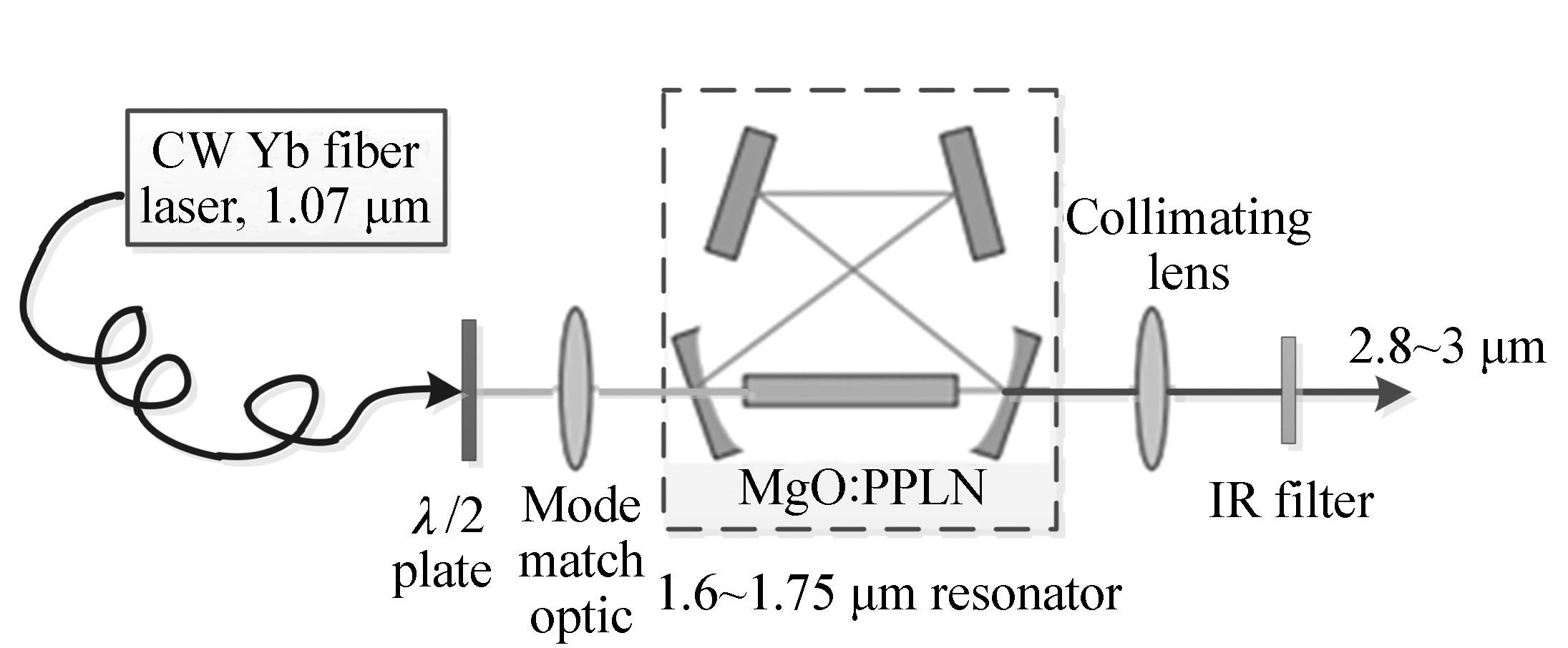
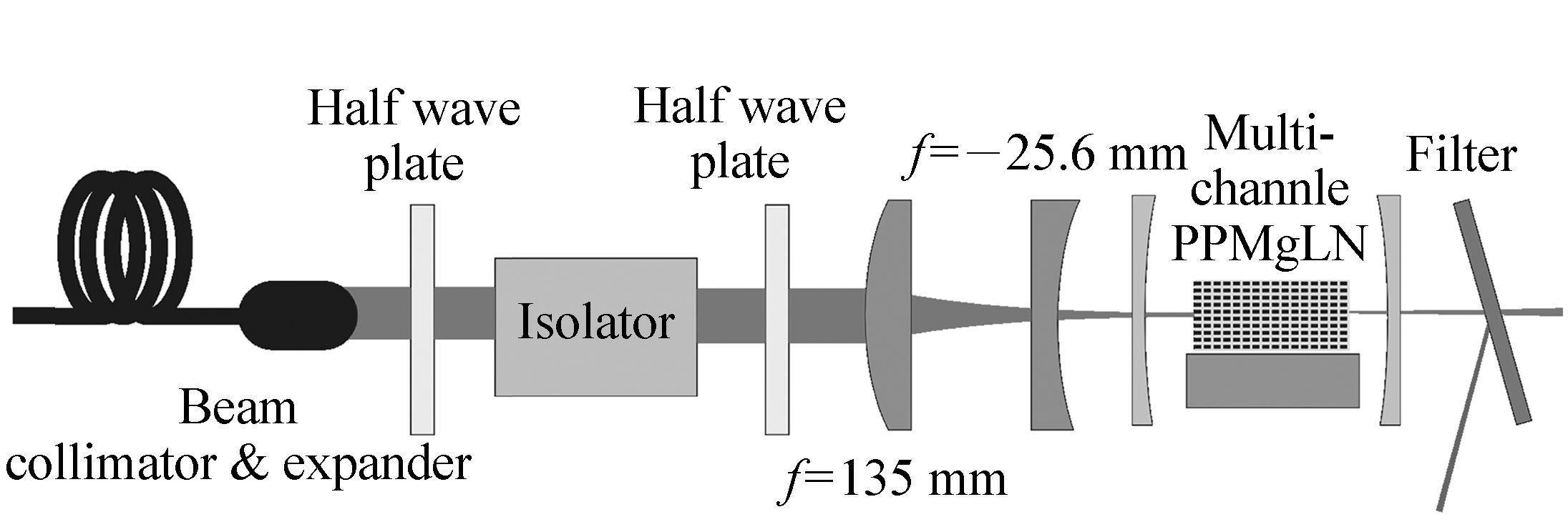
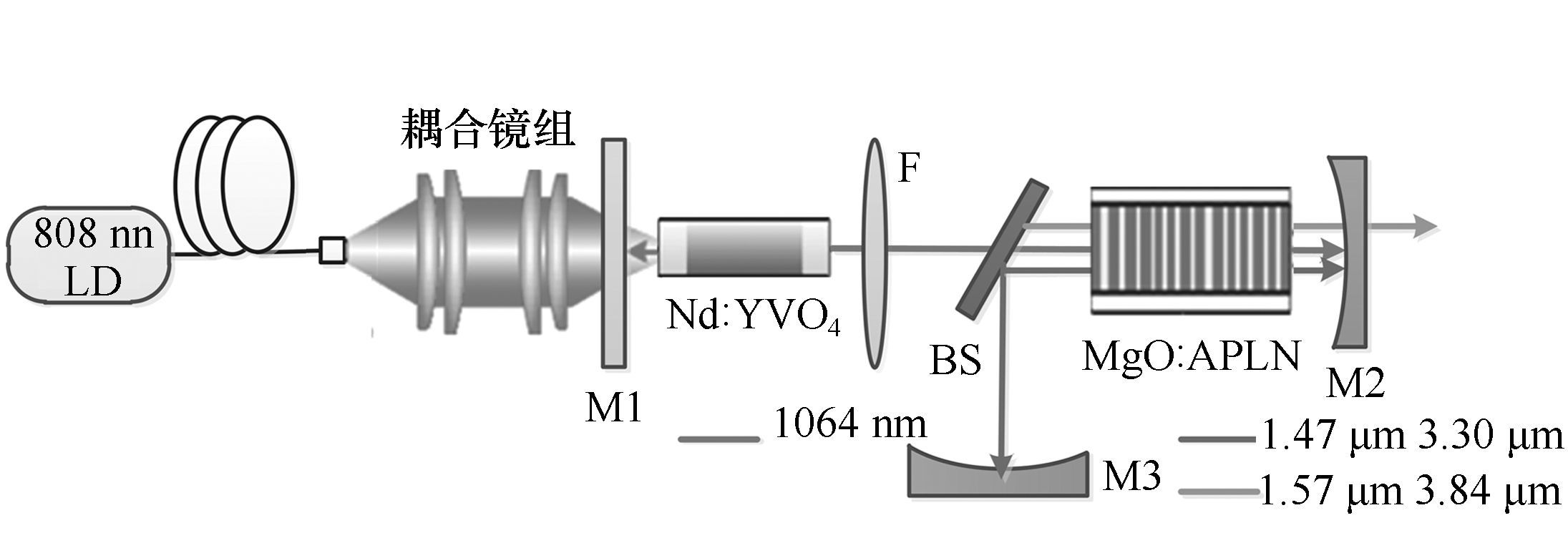
3~5 μm中红外激光器在环境污染检测、医疗、工业等领域具有重要的应用价值。本文总结了基于ZnGeP2、MgO∶PPLN晶体的光参量振荡器(OPO)的国内外发展现状,分析了其各自不同结构系统设计的优势和发展前景。指出高功率、小体积、轻重量的光学参量振荡器是未来重要发展方向,发展的技术核心是生长更大尺寸的中红外激光晶体以及研制更高性能指标的OPO泵浦源,并对中红外激光器的发展趋势进行了展望。
3~5 μm中红外激光器在环境污染检测、医疗、工业等领域具有重要的应用价值。本文总结了基于ZnGeP2、MgO∶PPLN晶体的光参量振荡器(OPO)的国内外发展现状,分析了其各自不同结构系统设计的优势和发展前景。指出高功率、小体积、轻重量的光学参量振荡器是未来重要发展方向,发展的技术核心是生长更大尺寸的中红外激光晶体以及研制更高性能指标的OPO泵浦源,并对中红外激光器的发展趋势进行了展望。






2016, 9(6): 625-632.
doi: 10.3788/CO.20160906.0625
摘要:
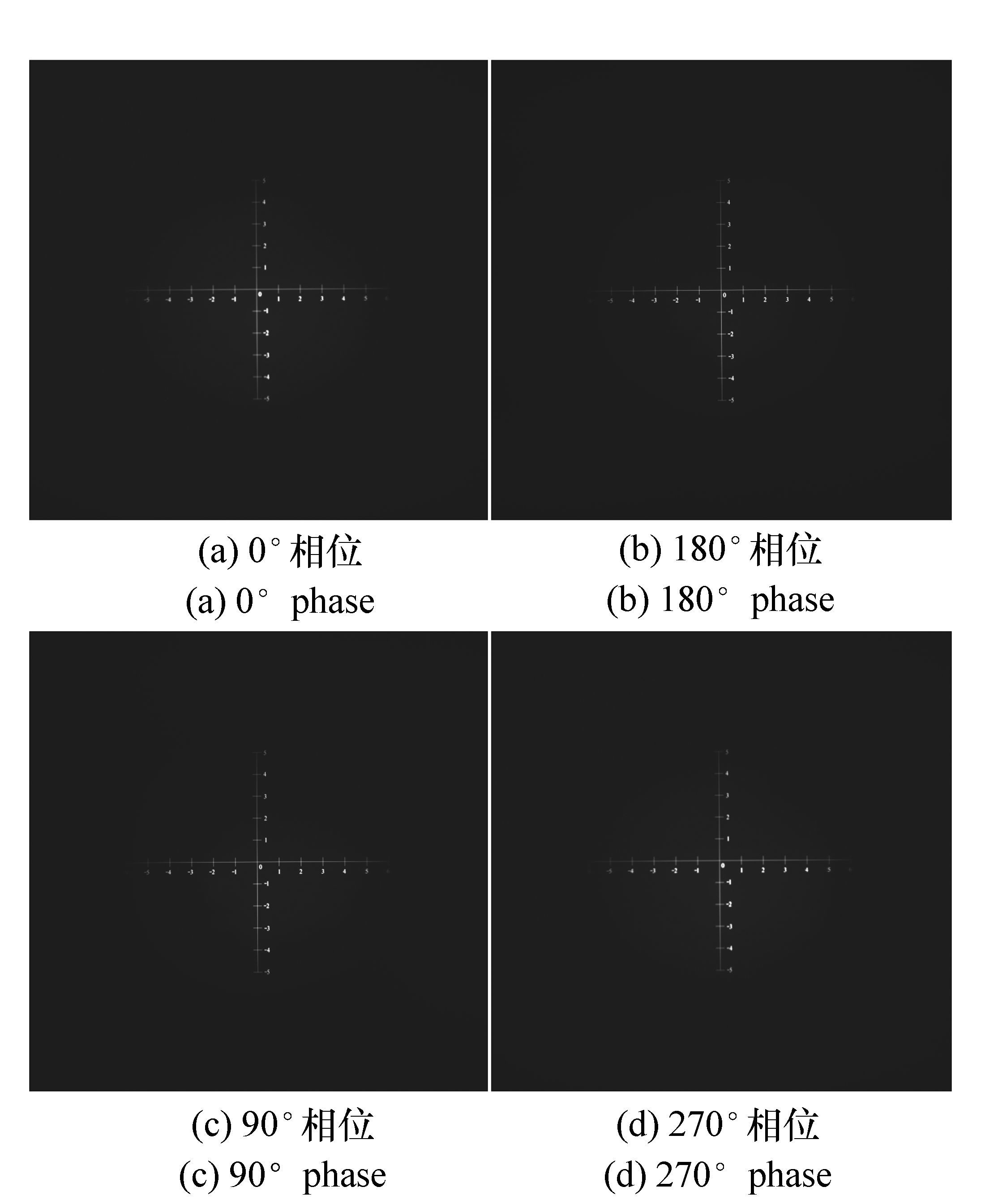
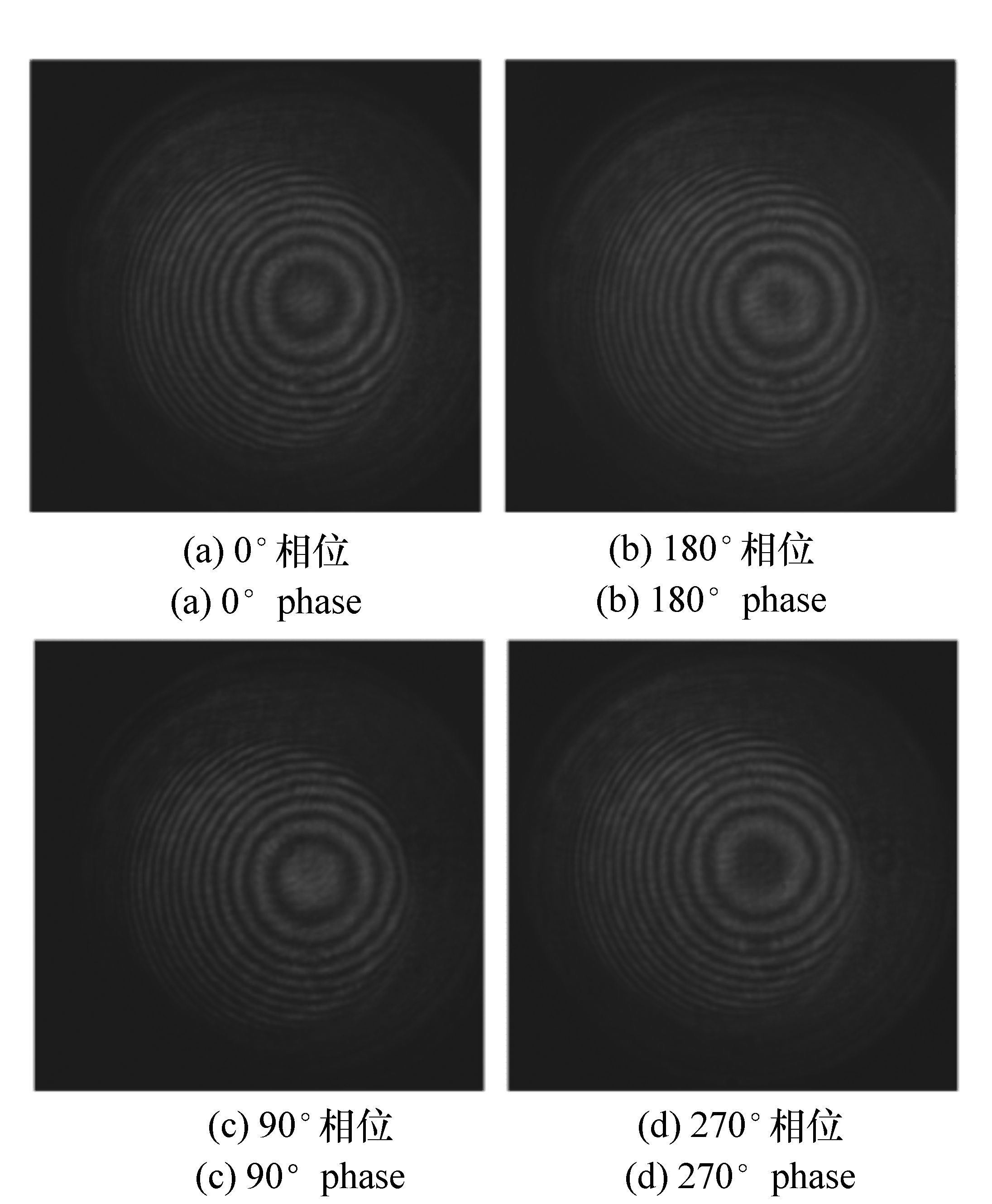
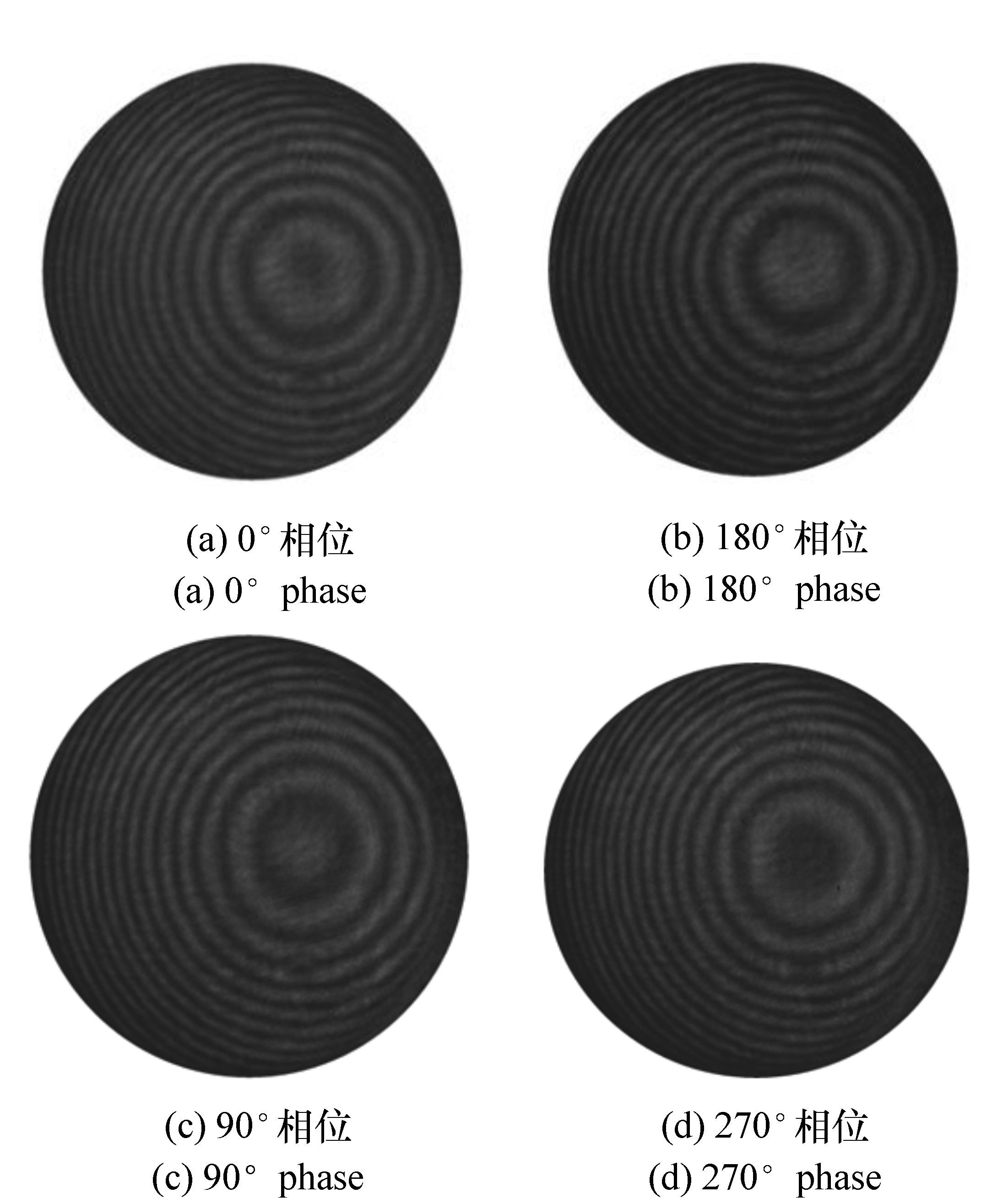
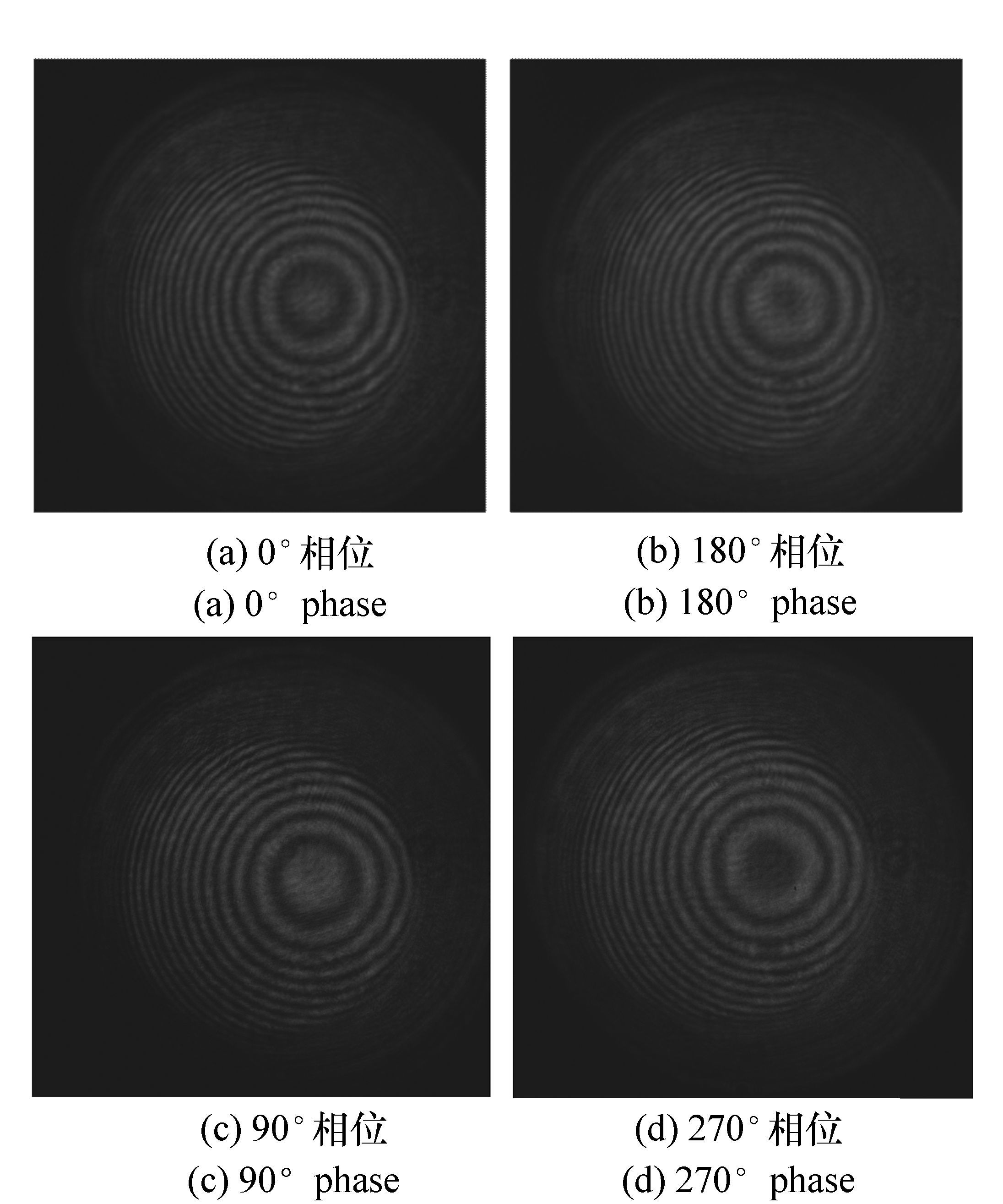
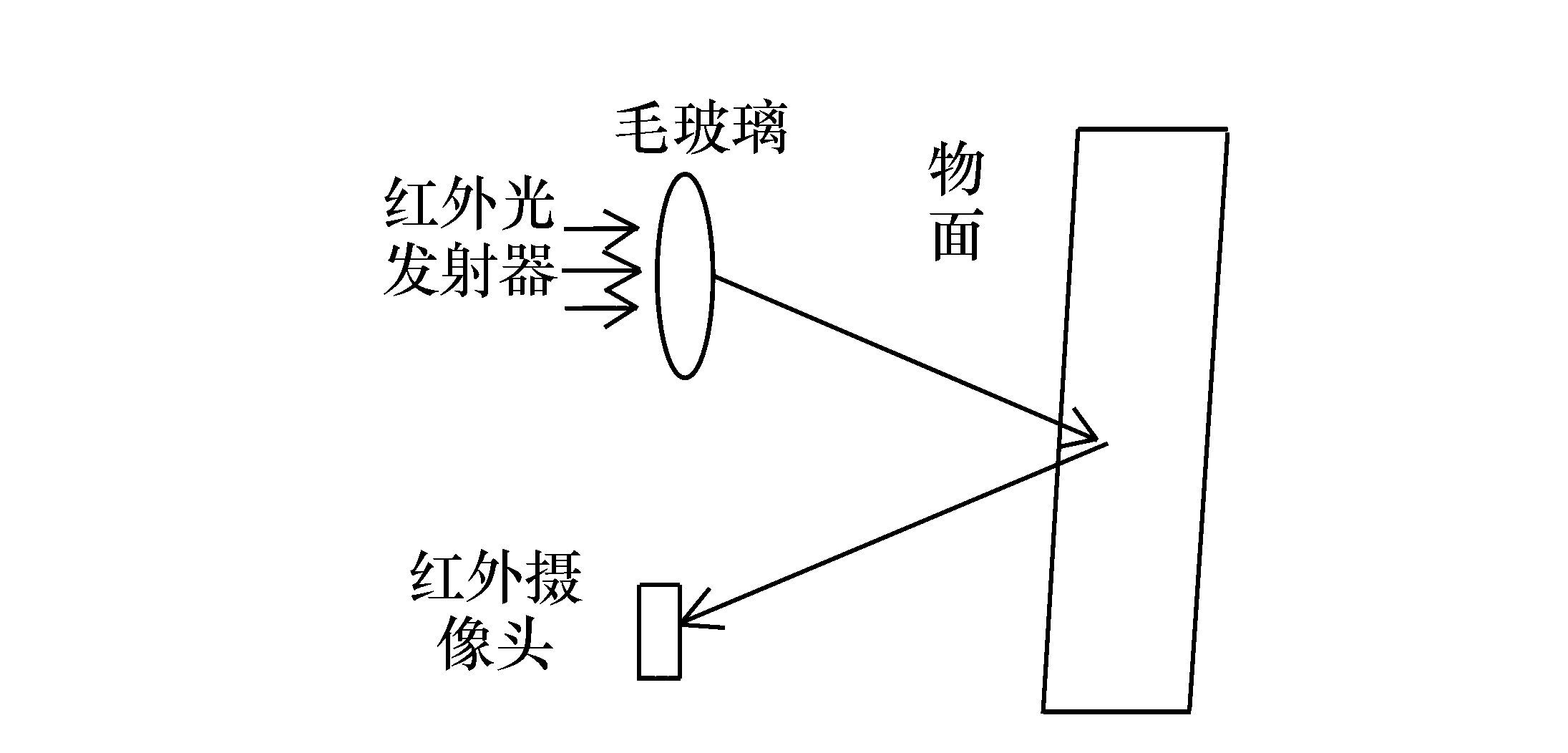
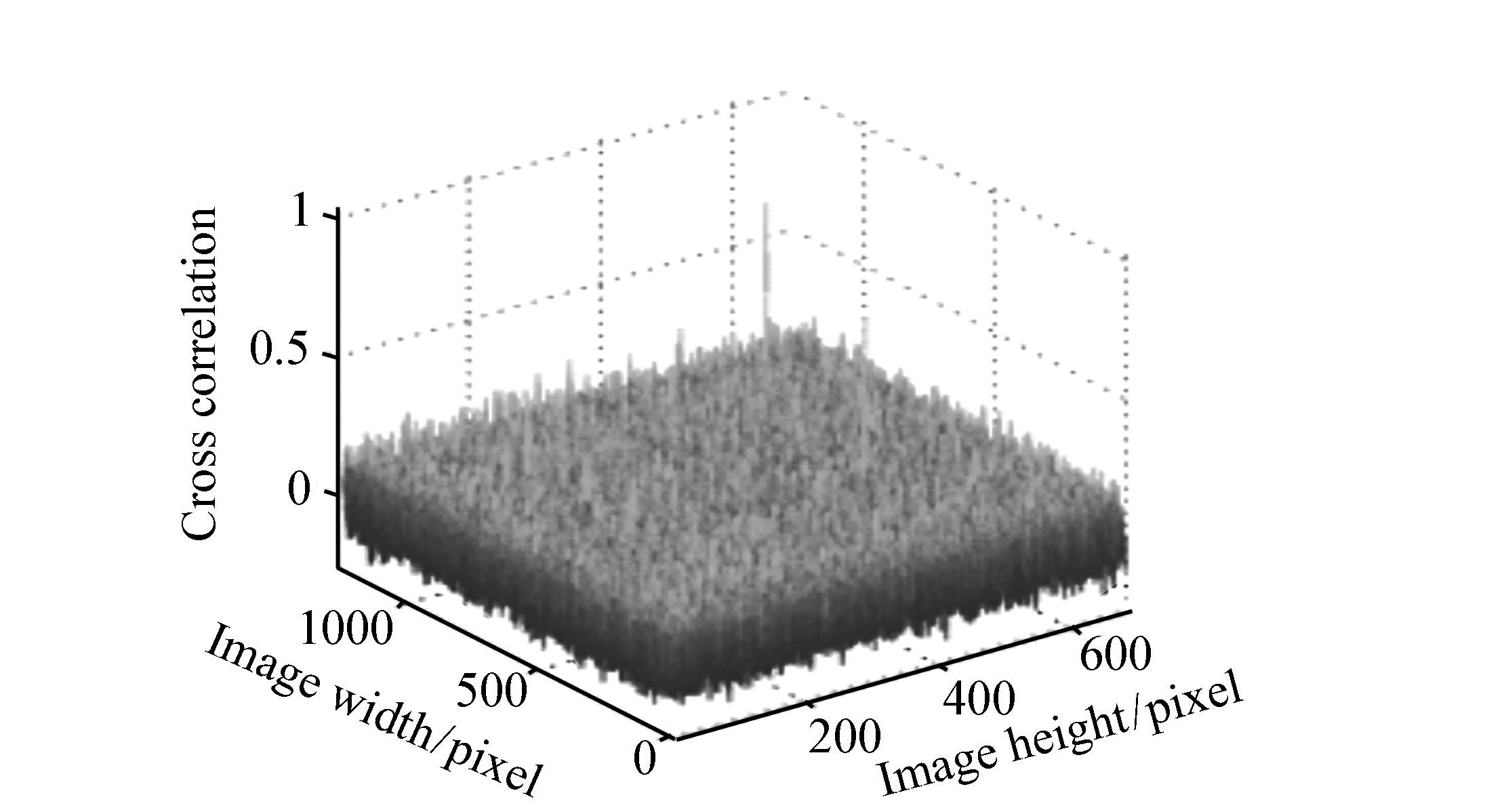
针对共光路菲索型动态干涉仪采集到的4幅条纹图的空间一致性问题,本文提出一种新的条纹图配准思路,将条纹图与图像配准在关联度上人为分开,搭建了专用的图像配准装置,避免将条纹与十字丝标志点混在一幅图像内而影响干涉仪的测量精度。首先通过本文搭建的条纹图配准装置对4台CMOS相机进行物理配准,然后利用整体最小二乘法对采集到的同一十字丝刻划板图像进行十字丝提取、交点计算以及旋转量计算,实现共光路菲索型动态干涉仪条纹图像的点点对应。最后通过试验对比验证,证明了本文算法的配准精度优于模板重心法的配准结果,互相关度达到96%以上。
针对共光路菲索型动态干涉仪采集到的4幅条纹图的空间一致性问题,本文提出一种新的条纹图配准思路,将条纹图与图像配准在关联度上人为分开,搭建了专用的图像配准装置,避免将条纹与十字丝标志点混在一幅图像内而影响干涉仪的测量精度。首先通过本文搭建的条纹图配准装置对4台CMOS相机进行物理配准,然后利用整体最小二乘法对采集到的同一十字丝刻划板图像进行十字丝提取、交点计算以及旋转量计算,实现共光路菲索型动态干涉仪条纹图像的点点对应。最后通过试验对比验证,证明了本文算法的配准精度优于模板重心法的配准结果,互相关度达到96%以上。



2016, 9(6): 633-641.
doi: 10.3788/CO.20160906.0633
摘要:
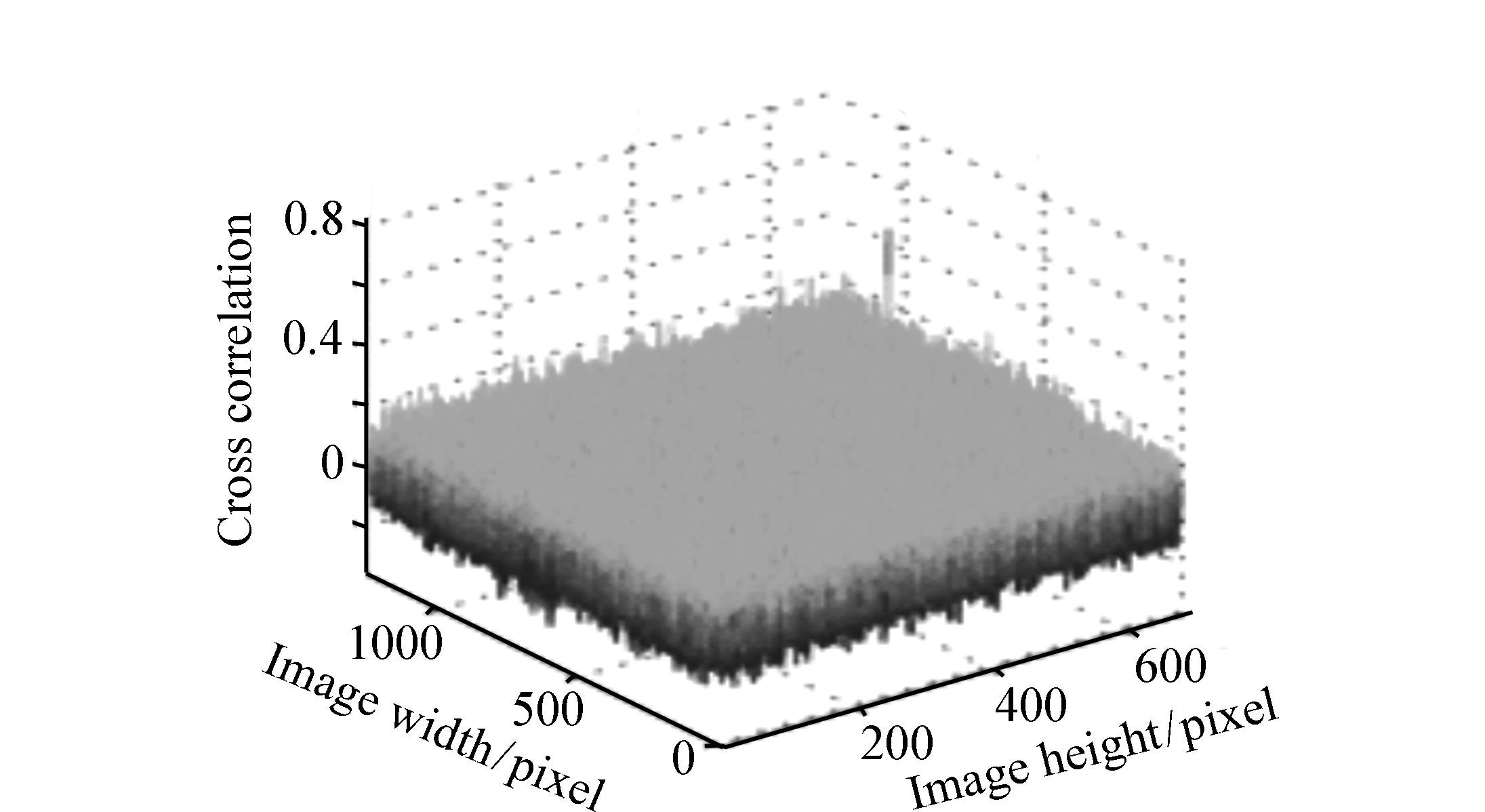
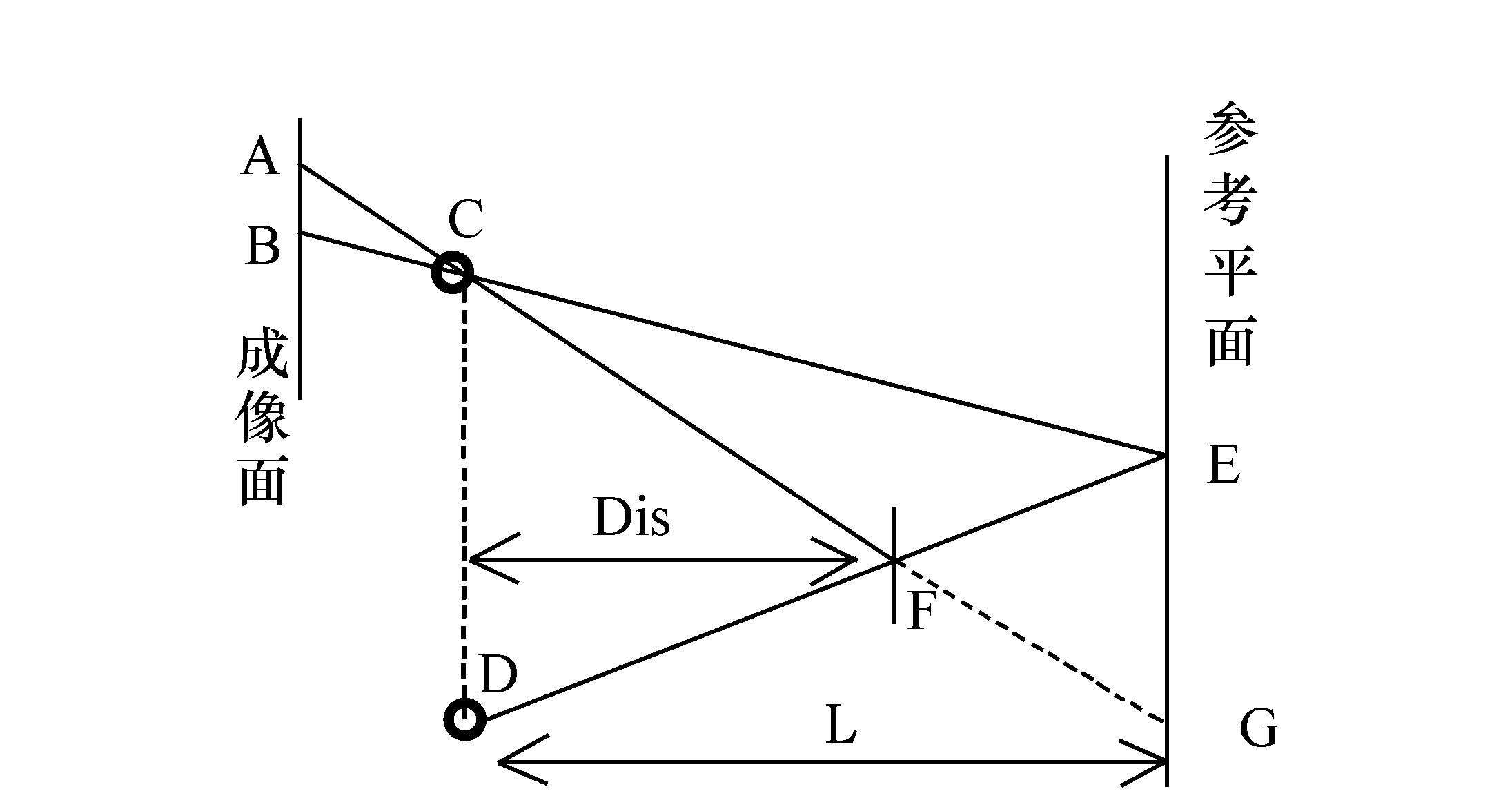
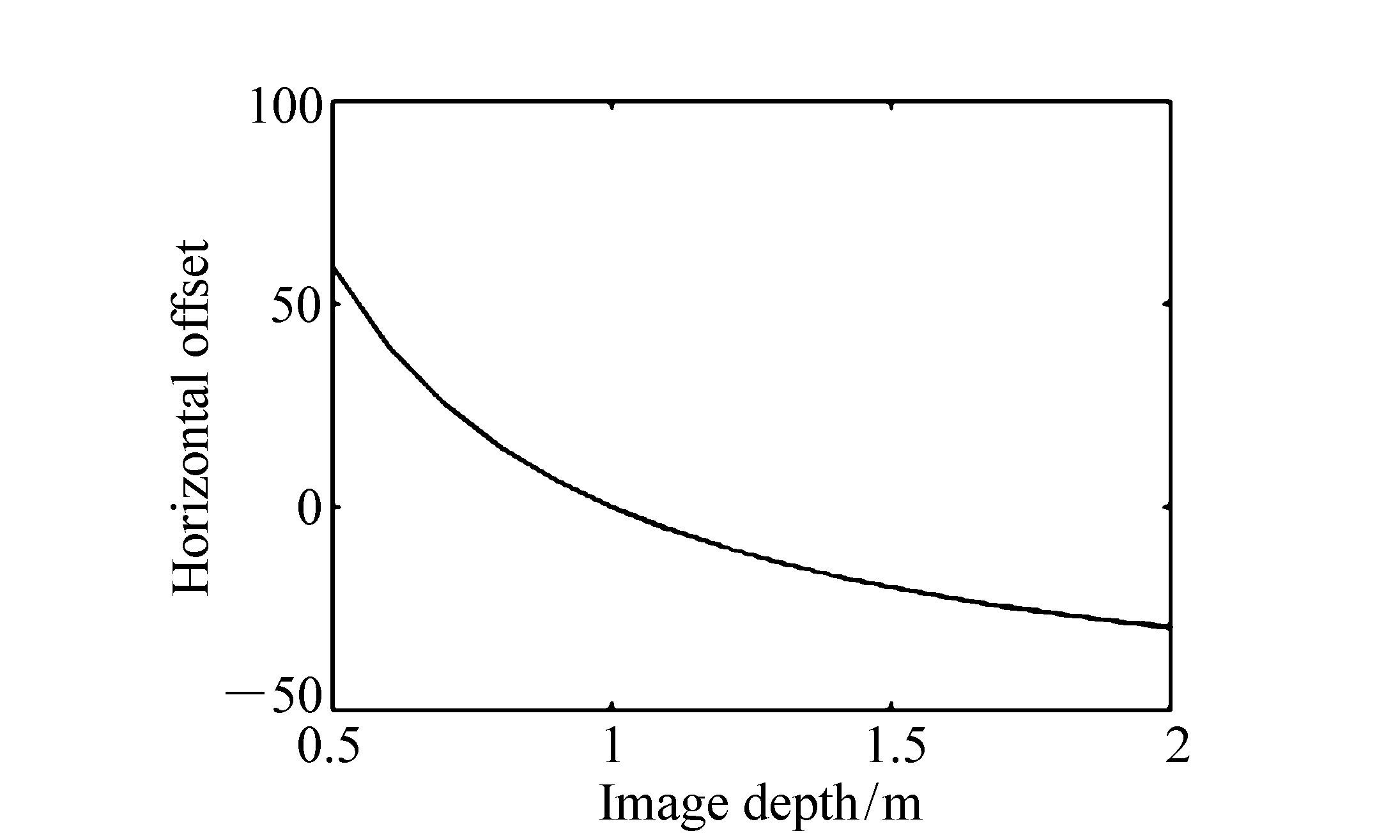
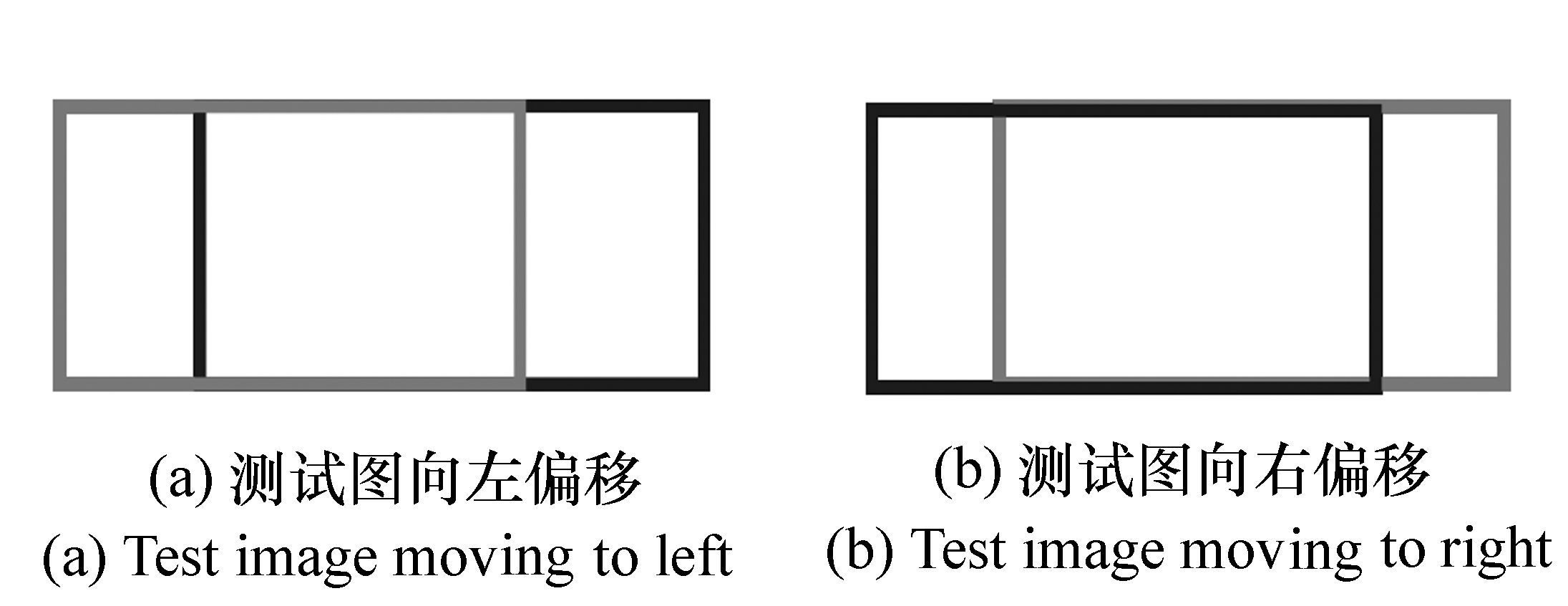
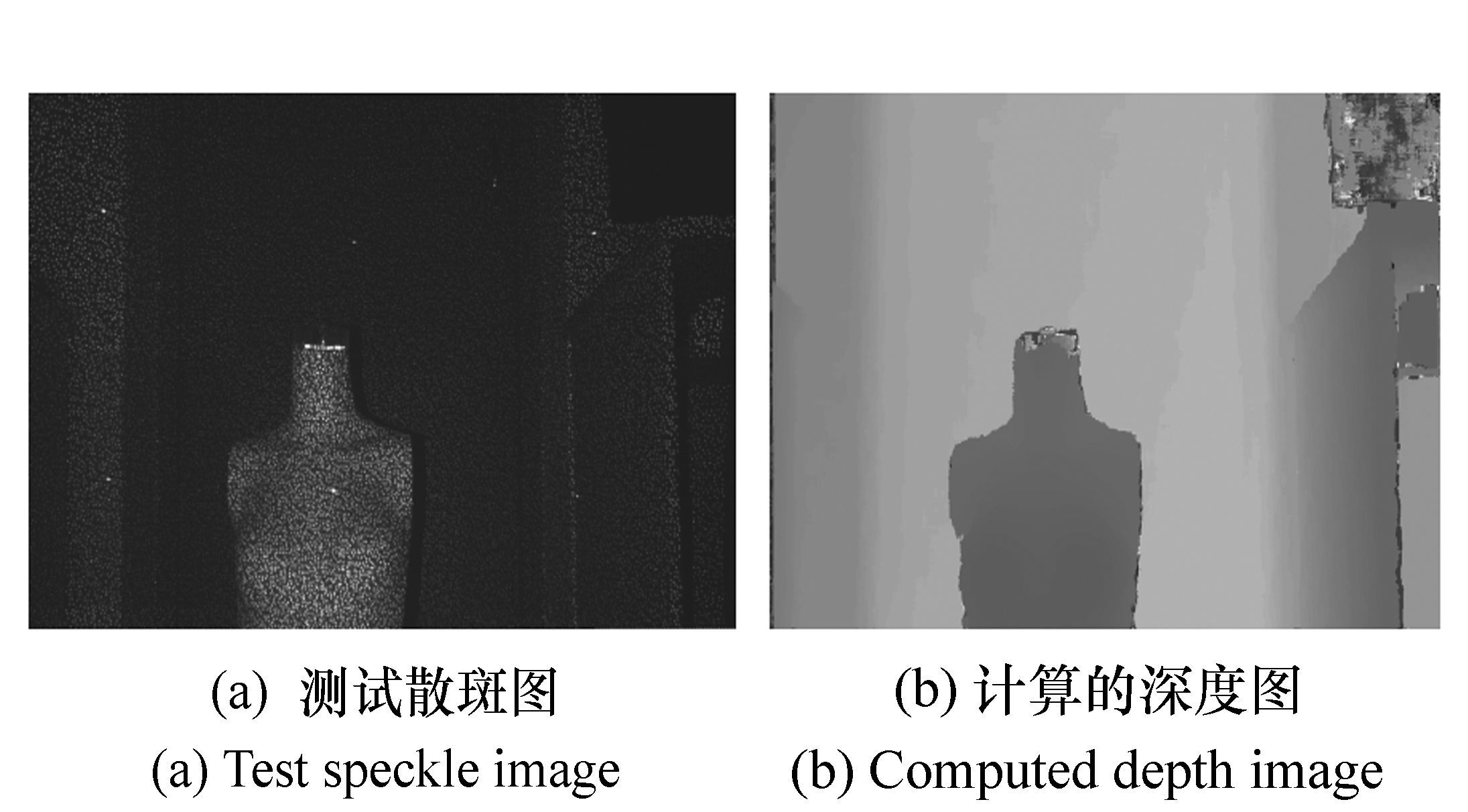
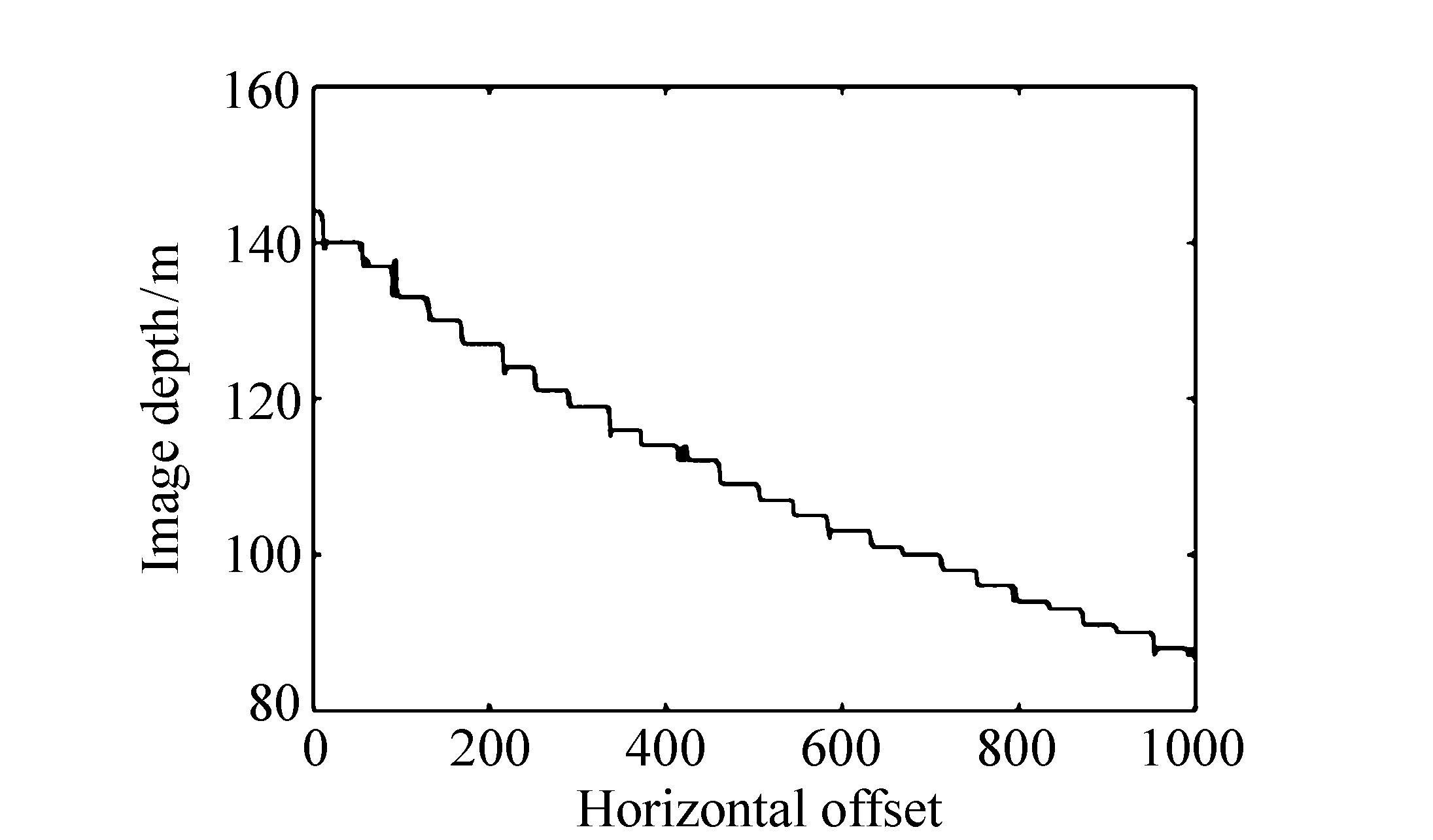
相对于普通灰度和彩色二维图像,深度图像可以得到物体的三维信息,使视觉识别和人机交互更加智能。国内外目前还没有低成本、公开的实时获取高质量深度图的方法。本文在对散斑图获取深度图原理研究的基础上,采取激光散斑的方式,运用块匹配的方法给出了一种大范围深度图的获取方法。首先,从原理上验证了块匹配方法的可行性;然后,分别从理论和实验两个方面对深度图的计算公式进行了推导和验证;再次,对深度图恢复过程进行了详细叙述,包括散斑图像的预处理和块匹配的过程;最后,给出了运用该块匹配方法得到的实验数据。实验结果表明,本文方法在物体距离相机50 cm左右时精度可以达到5 mm,200 cm时精度可以达到5 cm,可以满足室内大部分对象的识别要求。
相对于普通灰度和彩色二维图像,深度图像可以得到物体的三维信息,使视觉识别和人机交互更加智能。国内外目前还没有低成本、公开的实时获取高质量深度图的方法。本文在对散斑图获取深度图原理研究的基础上,采取激光散斑的方式,运用块匹配的方法给出了一种大范围深度图的获取方法。首先,从原理上验证了块匹配方法的可行性;然后,分别从理论和实验两个方面对深度图的计算公式进行了推导和验证;再次,对深度图恢复过程进行了详细叙述,包括散斑图像的预处理和块匹配的过程;最后,给出了运用该块匹配方法得到的实验数据。实验结果表明,本文方法在物体距离相机50 cm左右时精度可以达到5 mm,200 cm时精度可以达到5 cm,可以满足室内大部分对象的识别要求。









2016, 9(6): 642-648.
doi: 10.3788/CO.20160906.0642
摘要:
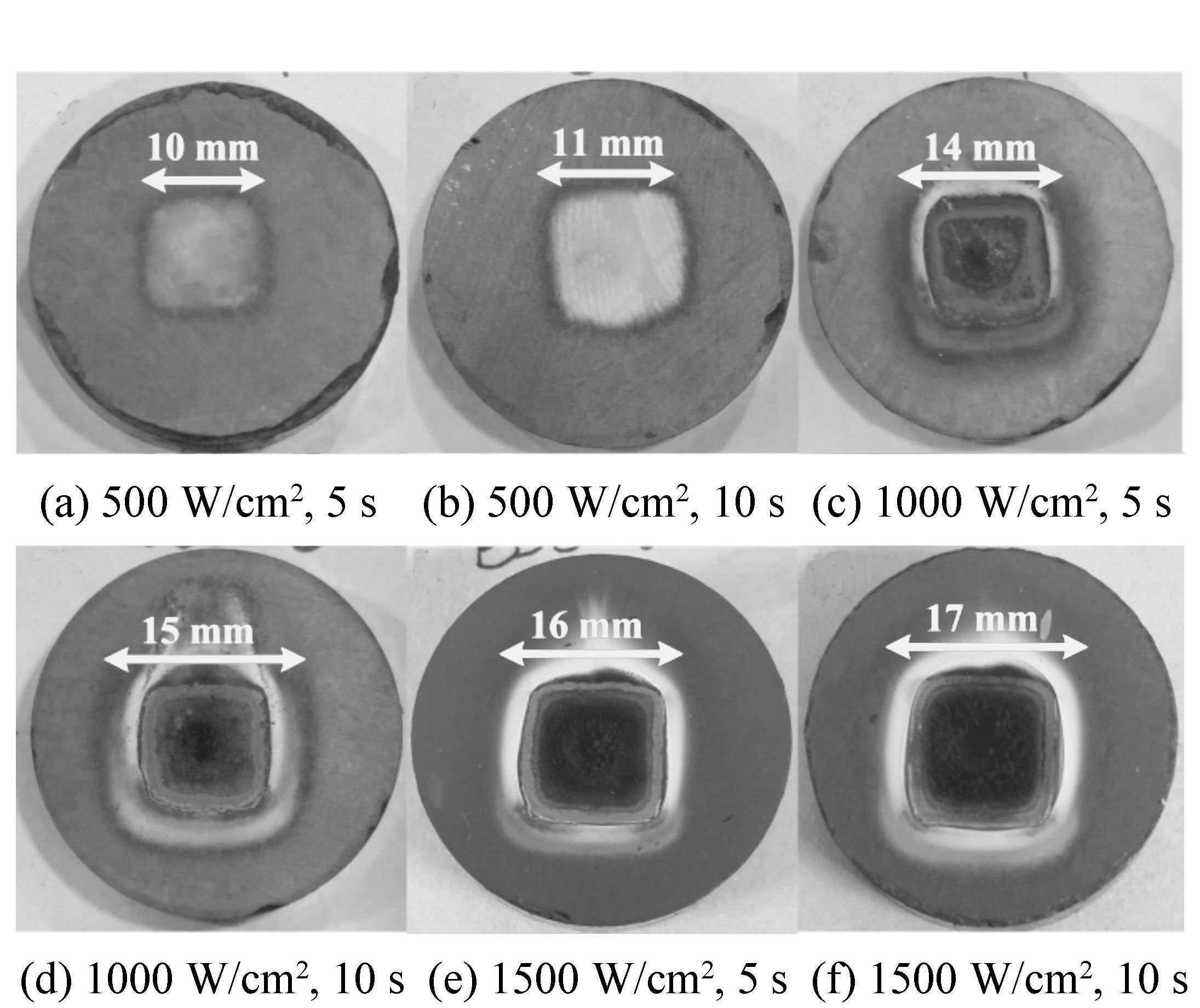
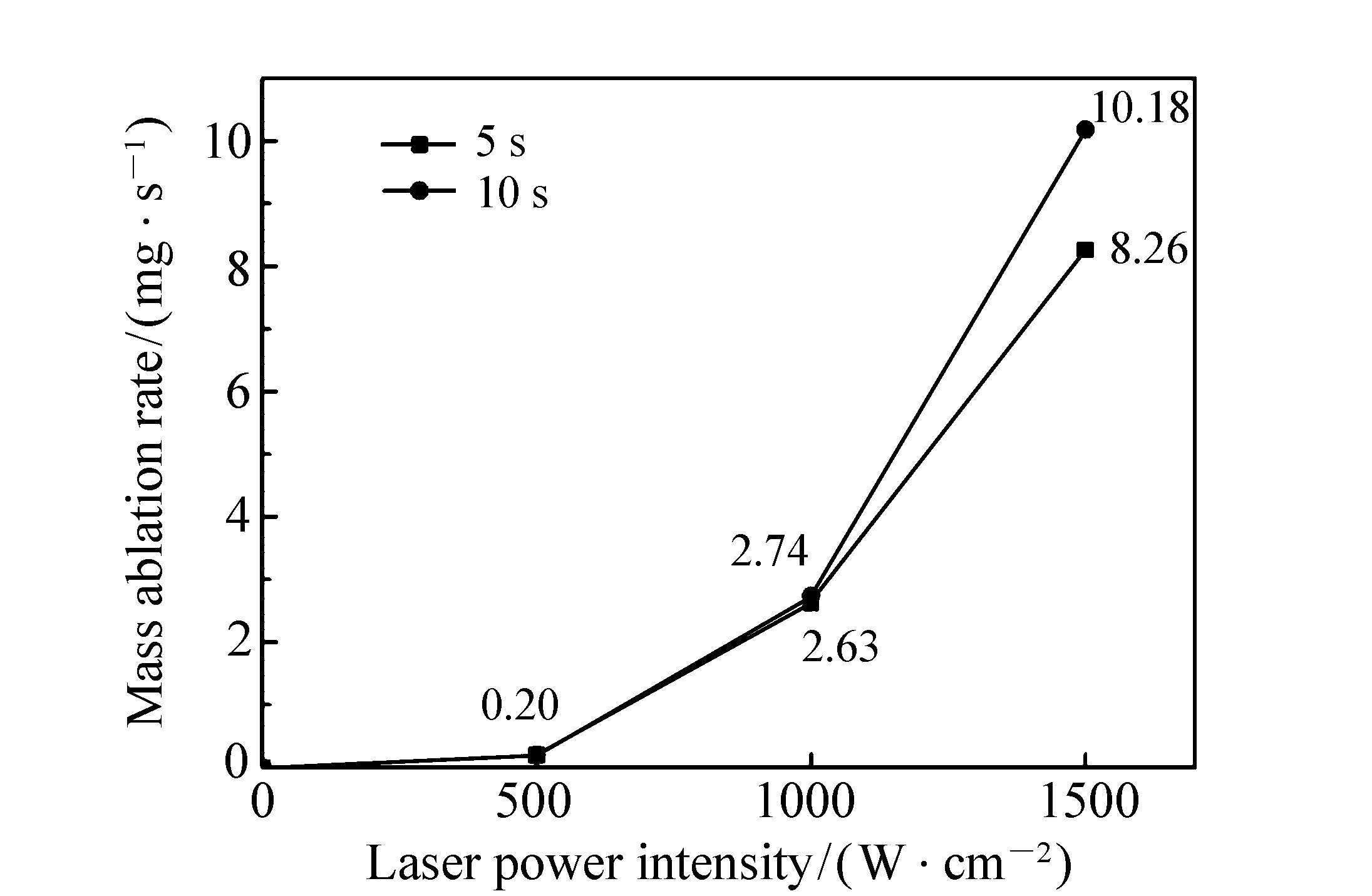
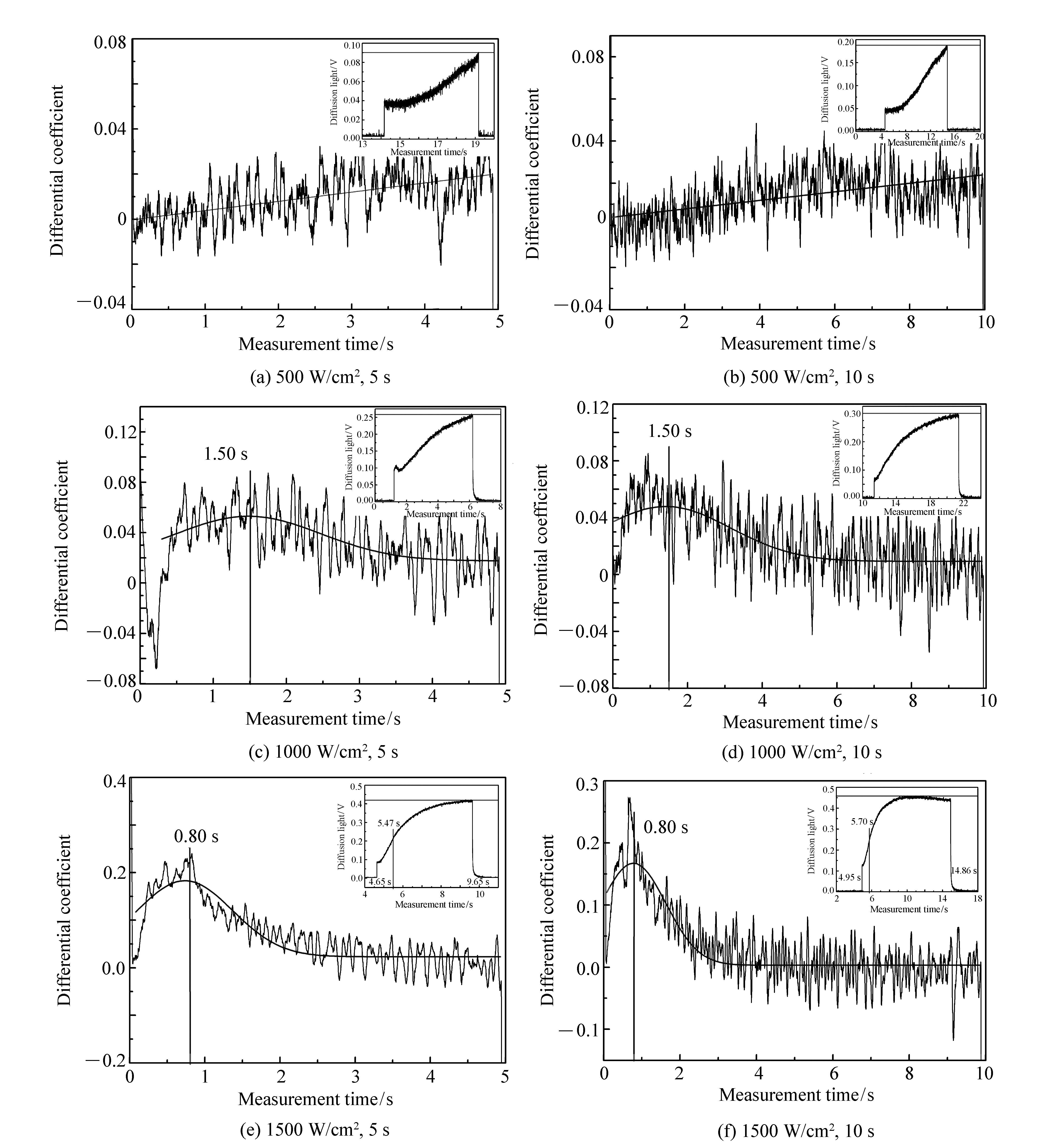
石墨-二氧化硅作为无机添加材料,广泛应用于各类航空航天器烧蚀涂层领域,其在高温下具有较高的反应吸热焓,在高能激光烧蚀领域具有良好的应用前景。目前,关于石墨-二氧化硅的高能激光烧蚀研究较少,尤其在高能激光烧蚀中的反应时间和烧蚀阈值难以确定。针对此问题,利用近红外探测器对激光辐照样品表面的散射光进行实时探测,并对其散射光曲线进行微分拟合处理。基于此散射光信号,结合样品烧蚀后的形态结构分析,研究了石墨-二氧化硅在不同激光功率密度下的反应时间阈值。研究结果表明:在激光输出功率密度为500 W/cm2持续辐照10 s时,散射光拟合曲线持续升高无突变,表明未发生明显的烧蚀;当激光功率密度升高至1 000~1 500 W/cm2时,散射光微分拟合曲线出现明显转折点,对应的反应时间阈值分别为1.5 s和0.8 s。
石墨-二氧化硅作为无机添加材料,广泛应用于各类航空航天器烧蚀涂层领域,其在高温下具有较高的反应吸热焓,在高能激光烧蚀领域具有良好的应用前景。目前,关于石墨-二氧化硅的高能激光烧蚀研究较少,尤其在高能激光烧蚀中的反应时间和烧蚀阈值难以确定。针对此问题,利用近红外探测器对激光辐照样品表面的散射光进行实时探测,并对其散射光曲线进行微分拟合处理。基于此散射光信号,结合样品烧蚀后的形态结构分析,研究了石墨-二氧化硅在不同激光功率密度下的反应时间阈值。研究结果表明:在激光输出功率密度为500 W/cm2持续辐照10 s时,散射光拟合曲线持续升高无突变,表明未发生明显的烧蚀;当激光功率密度升高至1 000~1 500 W/cm2时,散射光微分拟合曲线出现明显转折点,对应的反应时间阈值分别为1.5 s和0.8 s。


2016, 9(6): 649-655.
doi: 10.3788/CO.20160906.0649
摘要:
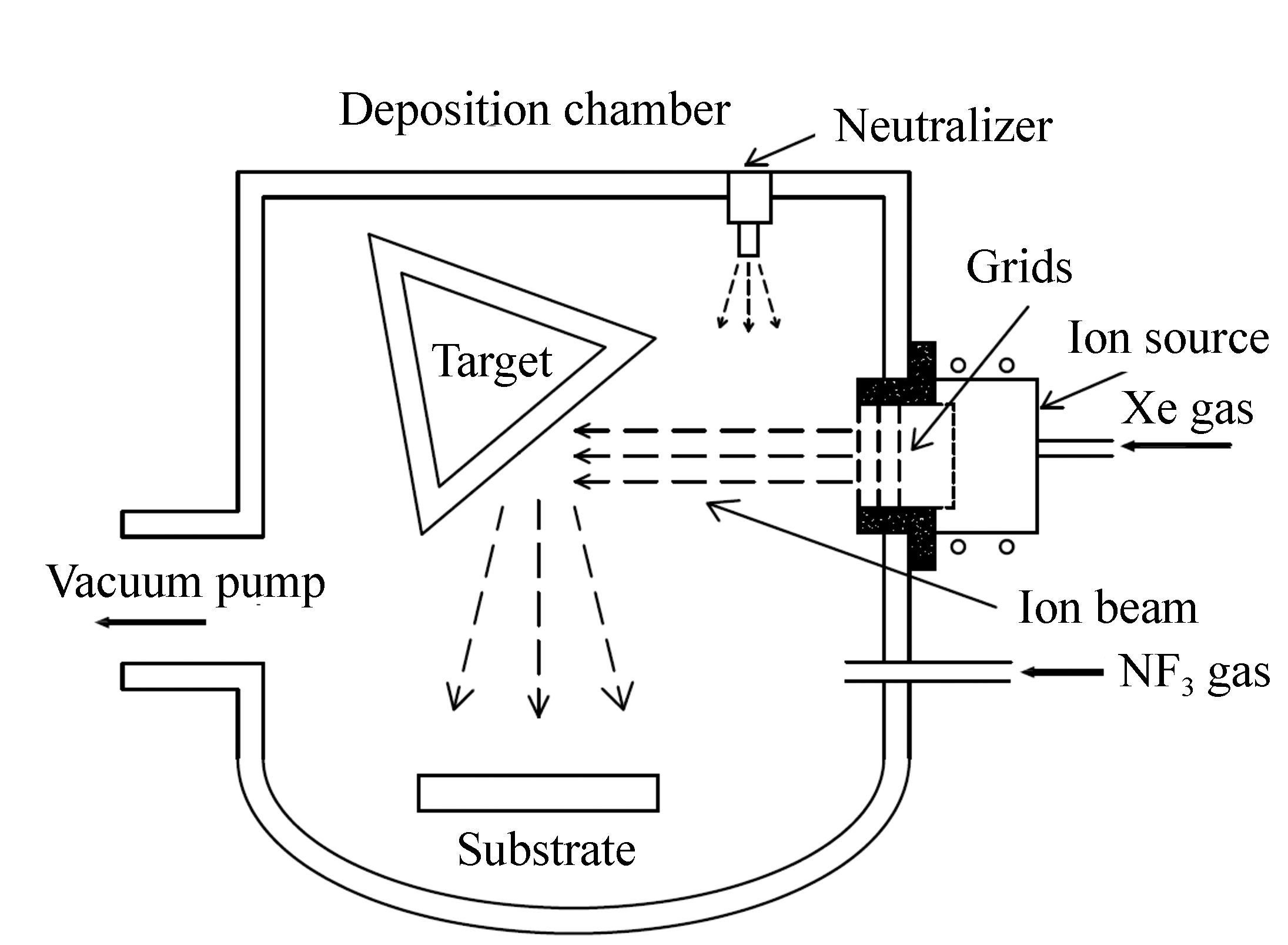
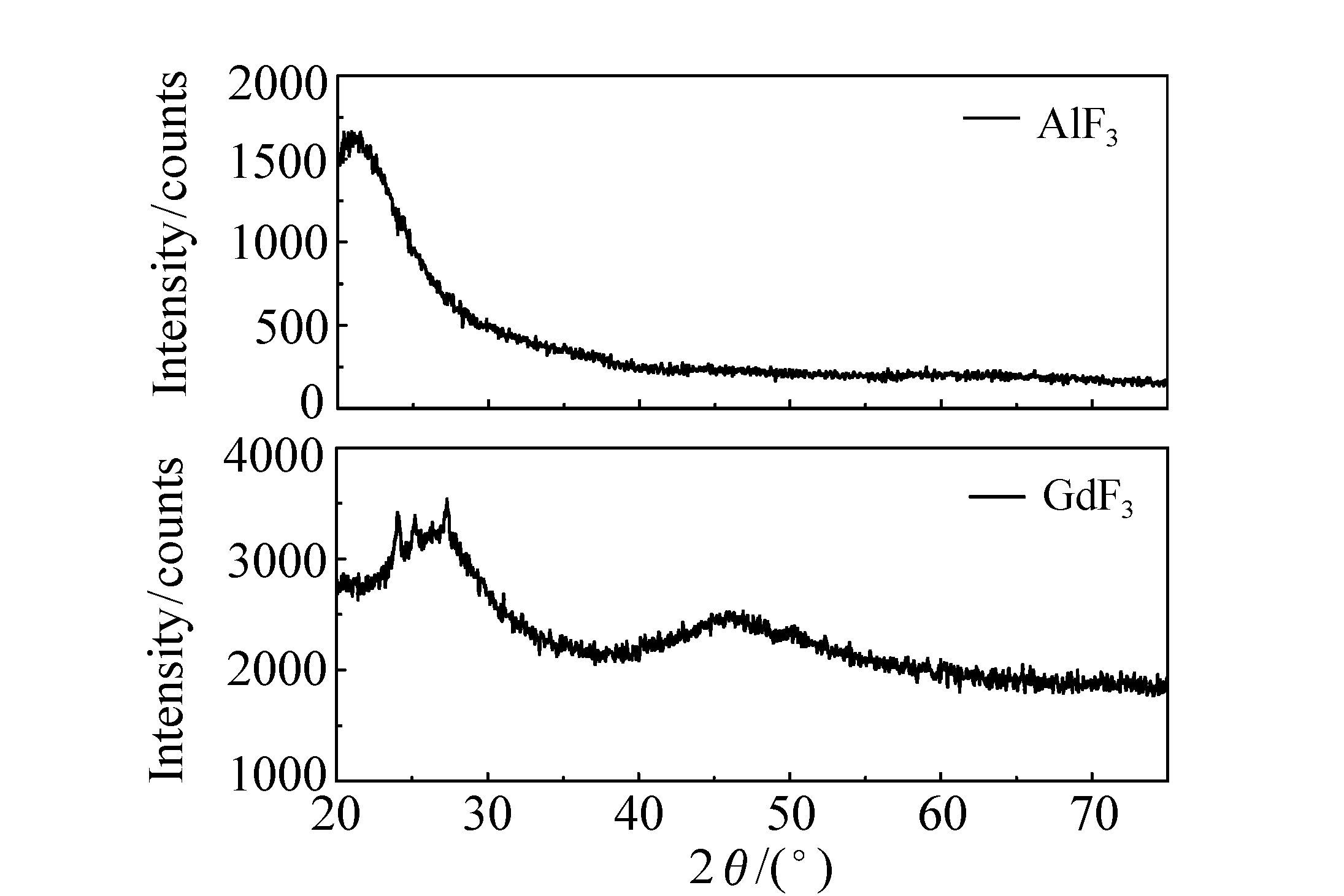
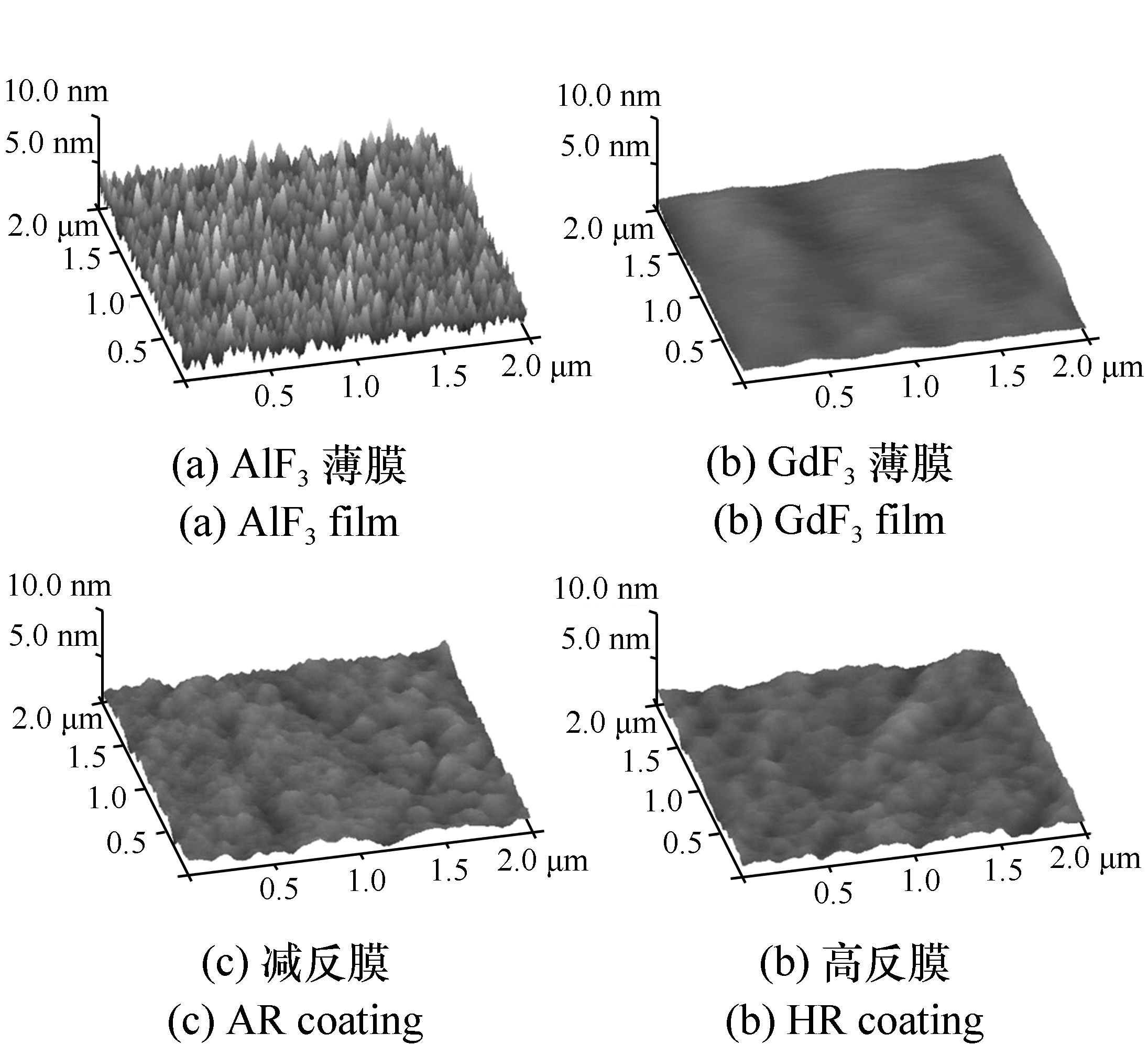
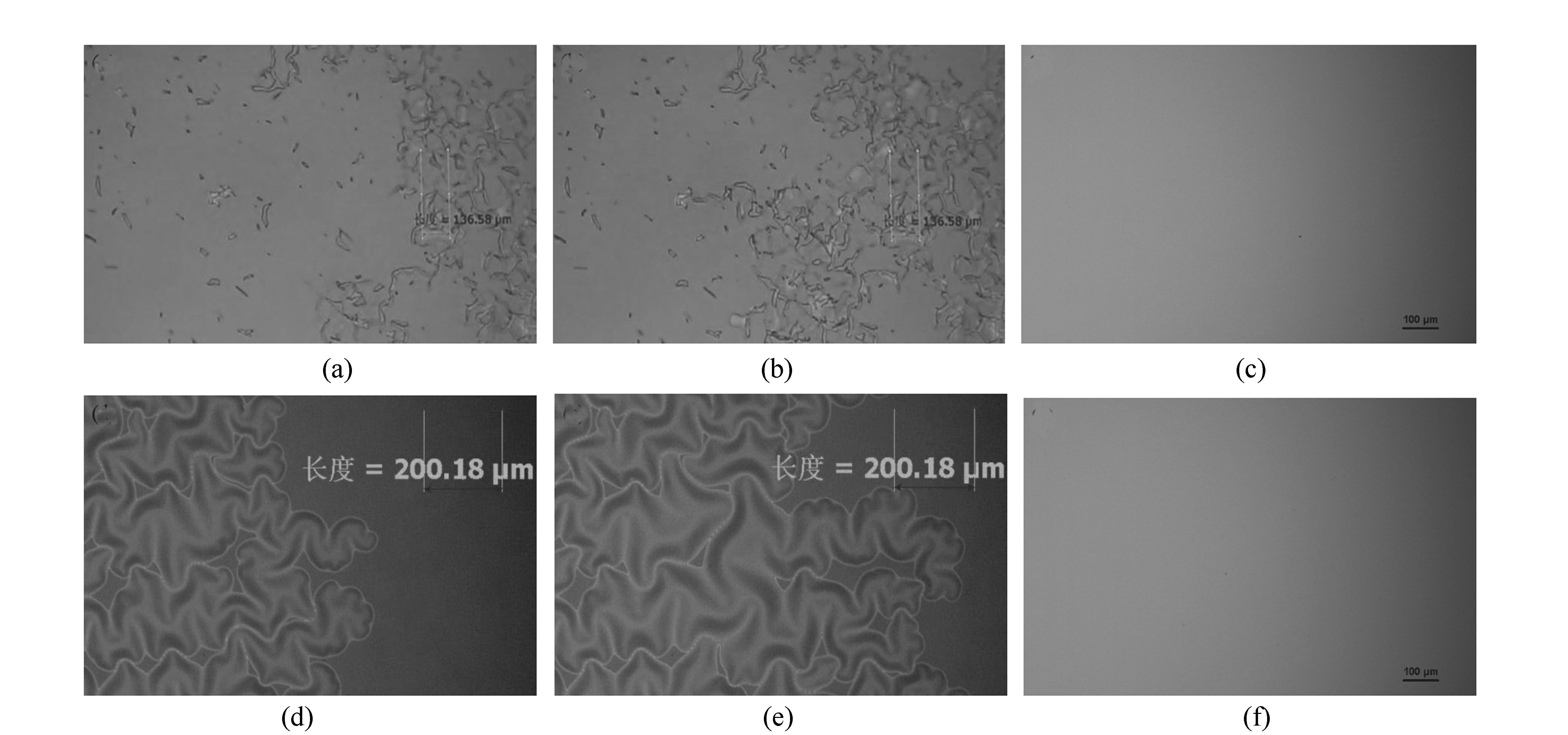
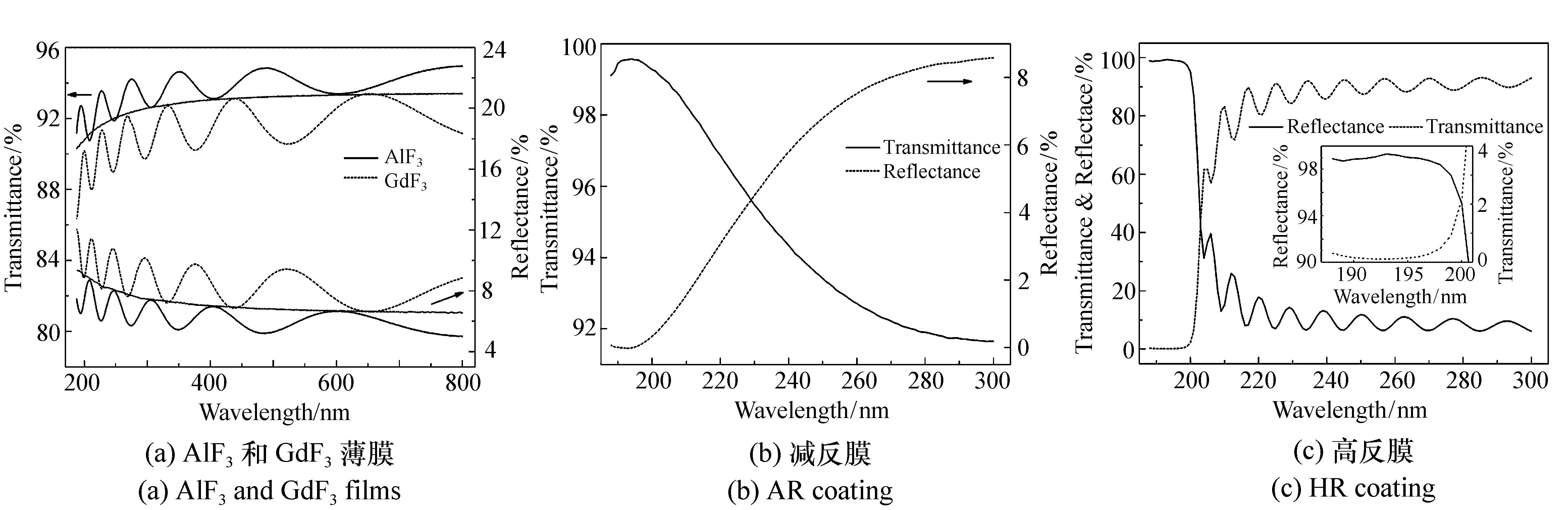
采用离子束溅射制备了AlF3、GdF3单层膜及193 nm减反和高反膜系,分别使用分光光度计、原子力显微镜和应力仪研究了薄膜的光学特性、微观结构以及残余应力。在优选的沉积参数下制备出消光系数分别为1.1×10-4和3.0×10-4的低损耗AlF3和GdF3薄膜,对应的折射率分别为1.43和1.67,193 nm减反膜系的透过率为99.6%,剩余反射几乎为零,而高反膜系的反射率为99.2%,透过率为0.1%。应力测量结果表明,AlF3薄膜表现为张应力而GdF3薄膜具有压应力,与沉积条件相关的低生长应力是AlF3和GdF3薄膜残余应力较小的主要原因,采用这两种材料制备的减反及高反膜系应力均低于50 MPa。针对平面和曲率半径为240 mm的凸面元件,通过设计修正挡板,250 mm口径膜厚均匀性均优于97%。为亚纳米精度的平面元件镀制193 nm减反膜系,镀膜后RMS由0.177 nm变为0.219 nm。
采用离子束溅射制备了AlF3、GdF3单层膜及193 nm减反和高反膜系,分别使用分光光度计、原子力显微镜和应力仪研究了薄膜的光学特性、微观结构以及残余应力。在优选的沉积参数下制备出消光系数分别为1.1×10-4和3.0×10-4的低损耗AlF3和GdF3薄膜,对应的折射率分别为1.43和1.67,193 nm减反膜系的透过率为99.6%,剩余反射几乎为零,而高反膜系的反射率为99.2%,透过率为0.1%。应力测量结果表明,AlF3薄膜表现为张应力而GdF3薄膜具有压应力,与沉积条件相关的低生长应力是AlF3和GdF3薄膜残余应力较小的主要原因,采用这两种材料制备的减反及高反膜系应力均低于50 MPa。针对平面和曲率半径为240 mm的凸面元件,通过设计修正挡板,250 mm口径膜厚均匀性均优于97%。为亚纳米精度的平面元件镀制193 nm减反膜系,镀膜后RMS由0.177 nm变为0.219 nm。



2016, 9(6): 656-662.
doi: 10.3788/CO.20160906.0656
摘要:
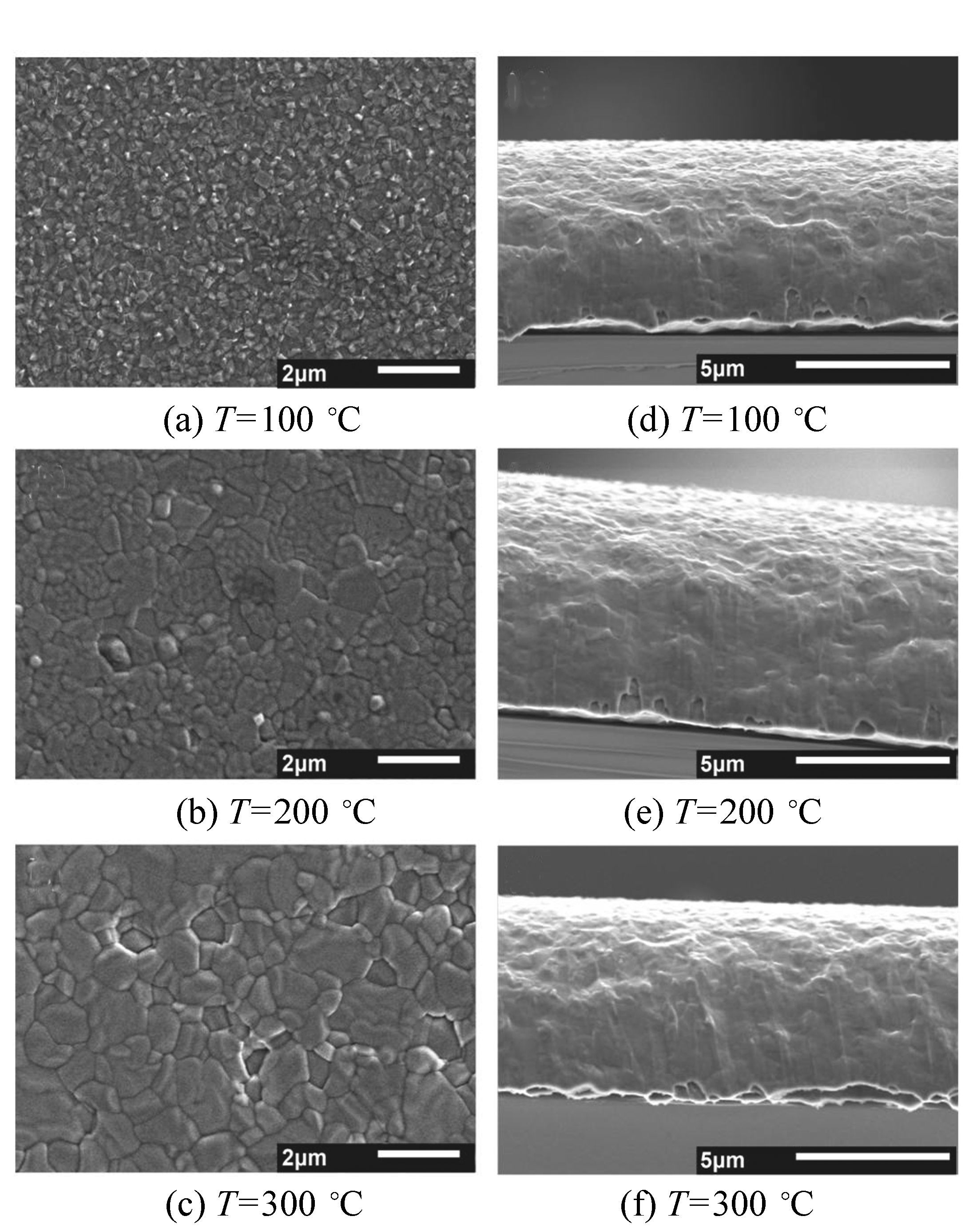
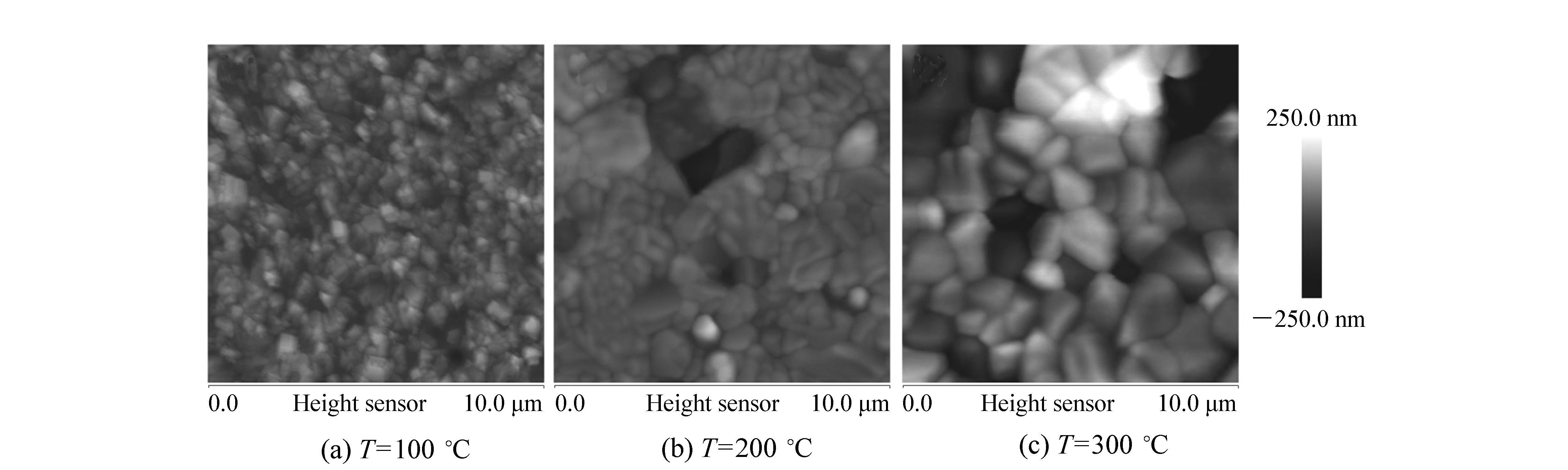
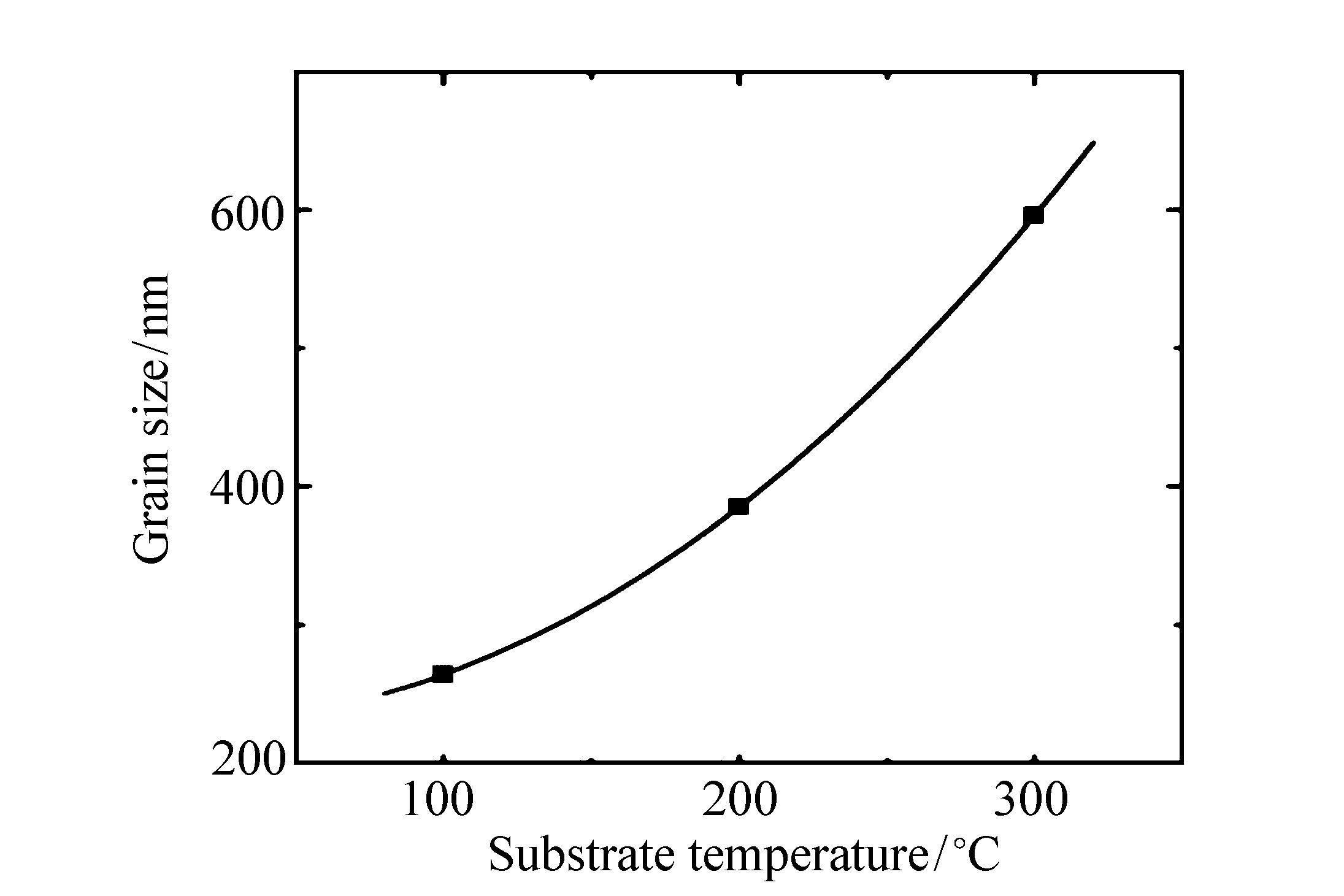
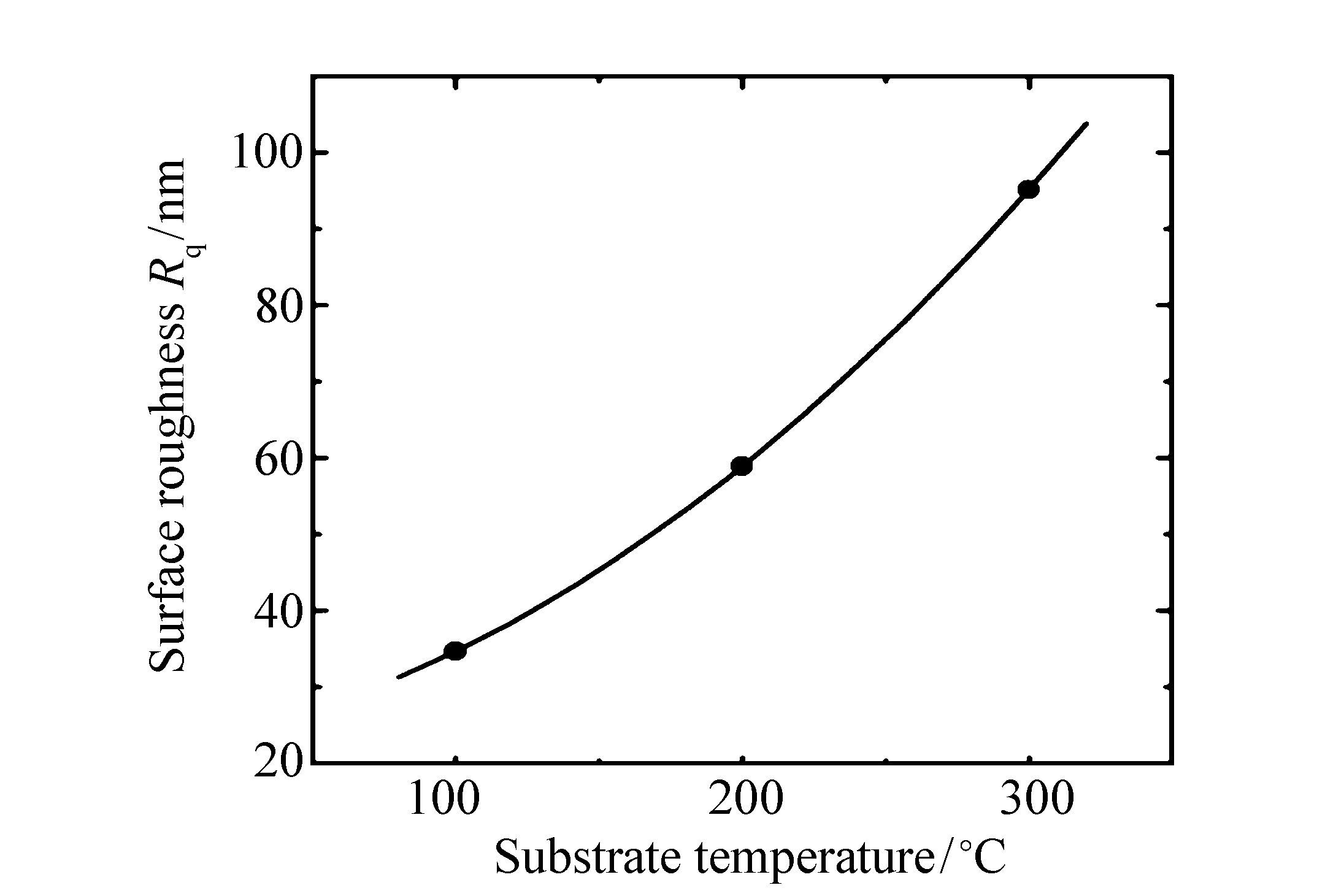
大尺寸中阶梯光栅具有大孔径和极高的衍射级次,可以实现普通光栅难以达到的极高光谱分辨率。中阶梯光栅通常是利用刻划机在厚铝膜上刻划而成,所以制备大面积均匀性的高质量铝膜刻划基底是实现高性能大尺寸中阶梯光栅的关键因素。在较厚铝膜的制备工艺中,基底温度是至关重要的工艺参数。本文通过电子束热蒸发镀铝工艺在不同基底温度下制备了厚铝膜样品,并利用原子力显微镜、扫描电镜等手段从宏观和微观尺度详细分析了基底温度对铝膜质量的影响。铝膜平均晶粒尺寸从100℃时的264.34 nm增大到200℃时的384.97 nm和300℃时的596.35 nm,表面粗糙度Rq从100℃时的34.7 nm增长到200℃时的58.9 nm和300℃时的95.1 nm。结果表明,随着基底温度的升高表面粗糙度迅速增大,铝膜的表面质量严重退化。
大尺寸中阶梯光栅具有大孔径和极高的衍射级次,可以实现普通光栅难以达到的极高光谱分辨率。中阶梯光栅通常是利用刻划机在厚铝膜上刻划而成,所以制备大面积均匀性的高质量铝膜刻划基底是实现高性能大尺寸中阶梯光栅的关键因素。在较厚铝膜的制备工艺中,基底温度是至关重要的工艺参数。本文通过电子束热蒸发镀铝工艺在不同基底温度下制备了厚铝膜样品,并利用原子力显微镜、扫描电镜等手段从宏观和微观尺度详细分析了基底温度对铝膜质量的影响。铝膜平均晶粒尺寸从100℃时的264.34 nm增大到200℃时的384.97 nm和300℃时的596.35 nm,表面粗糙度Rq从100℃时的34.7 nm增长到200℃时的58.9 nm和300℃时的95.1 nm。结果表明,随着基底温度的升高表面粗糙度迅速增大,铝膜的表面质量严重退化。
2016, 9(6): 663-670.
doi: 10.3788/CO.20160906.0663
摘要:
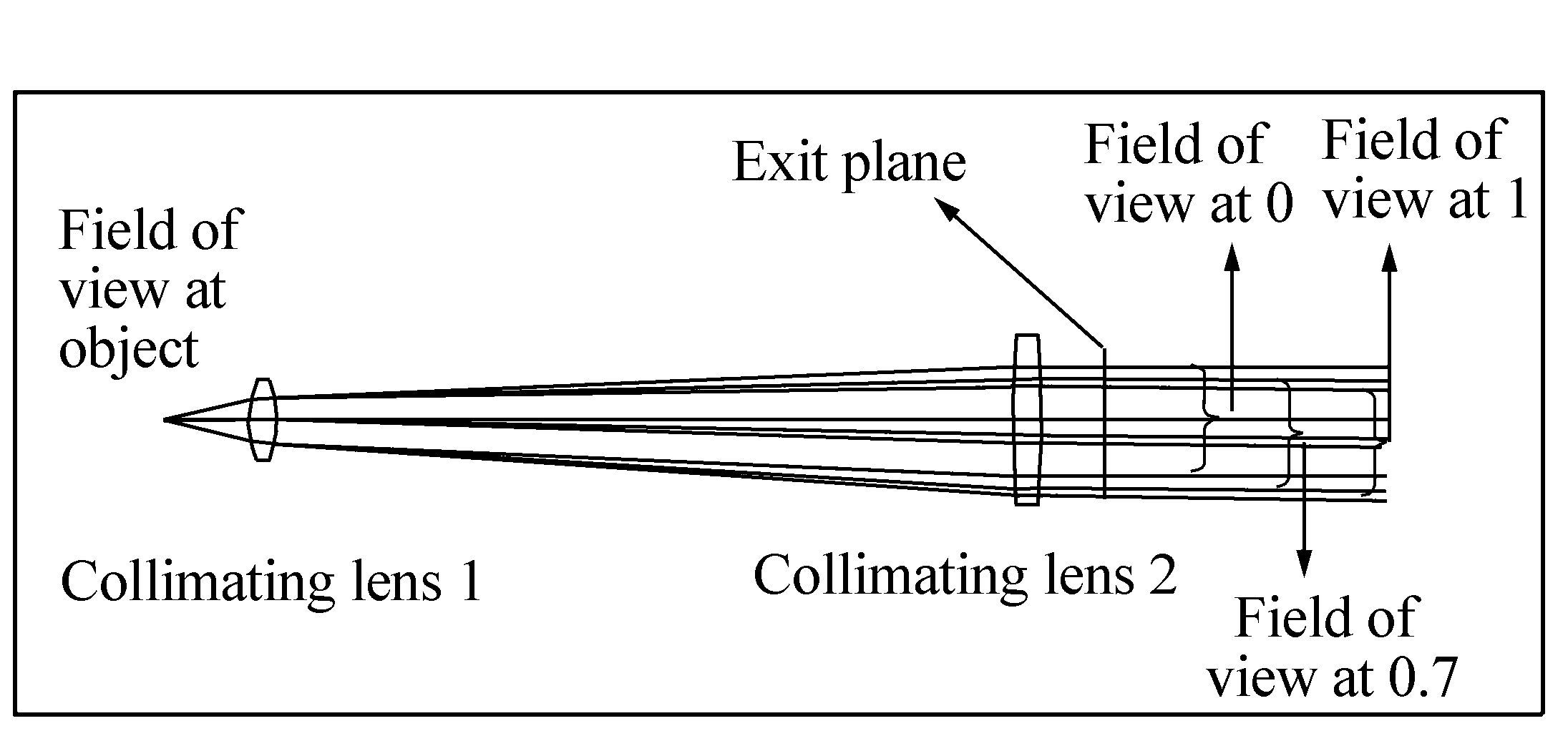
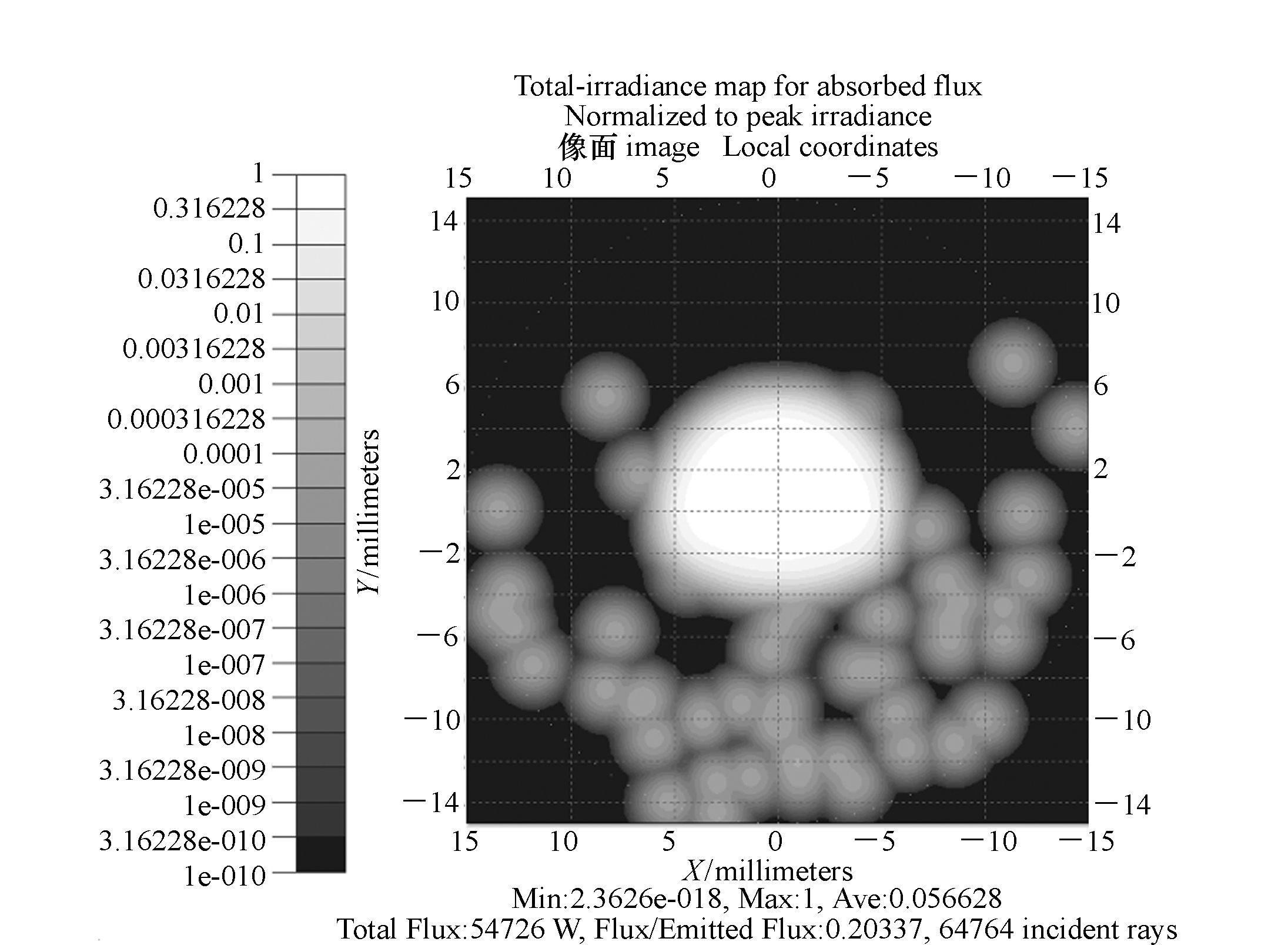
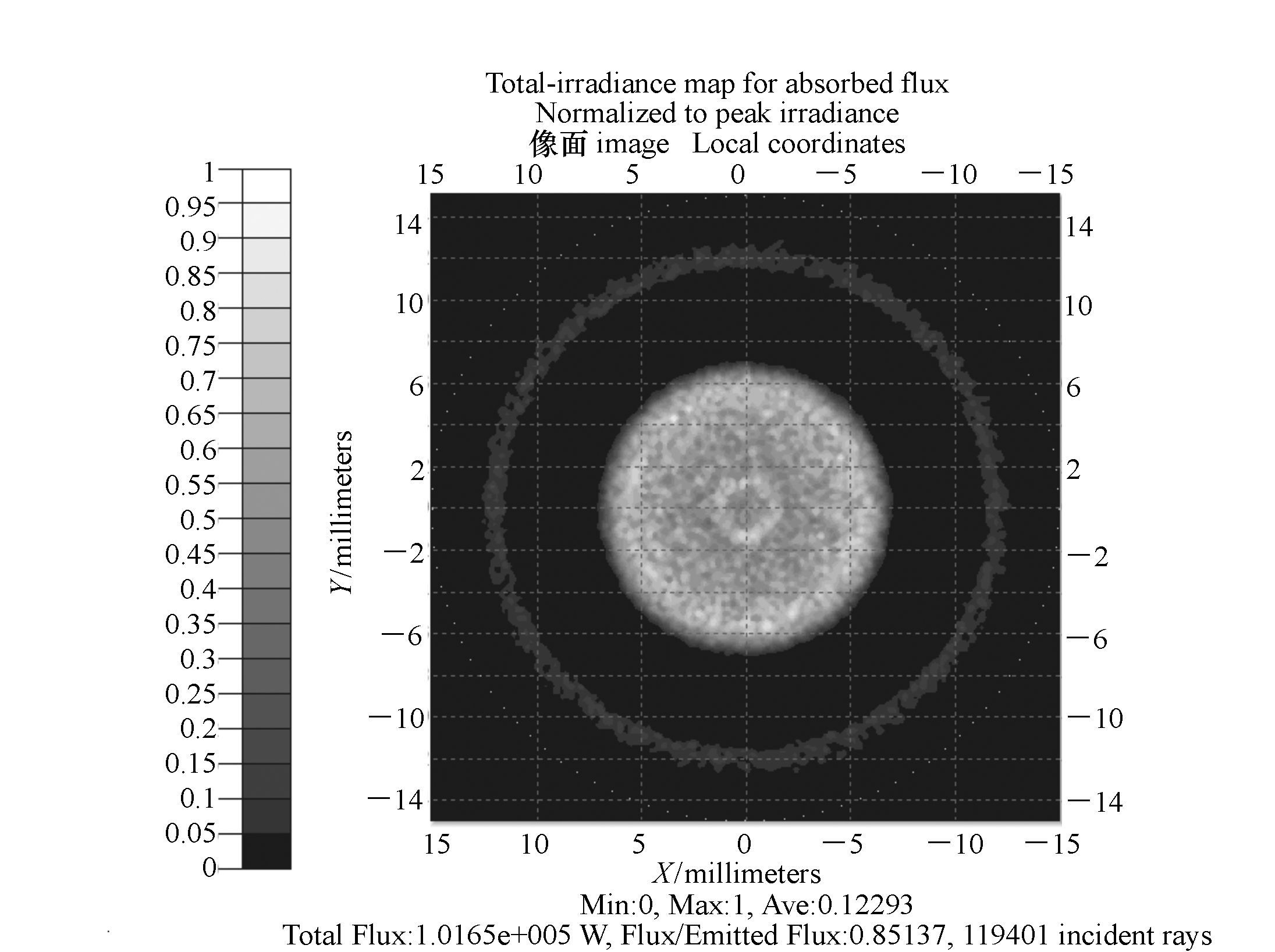
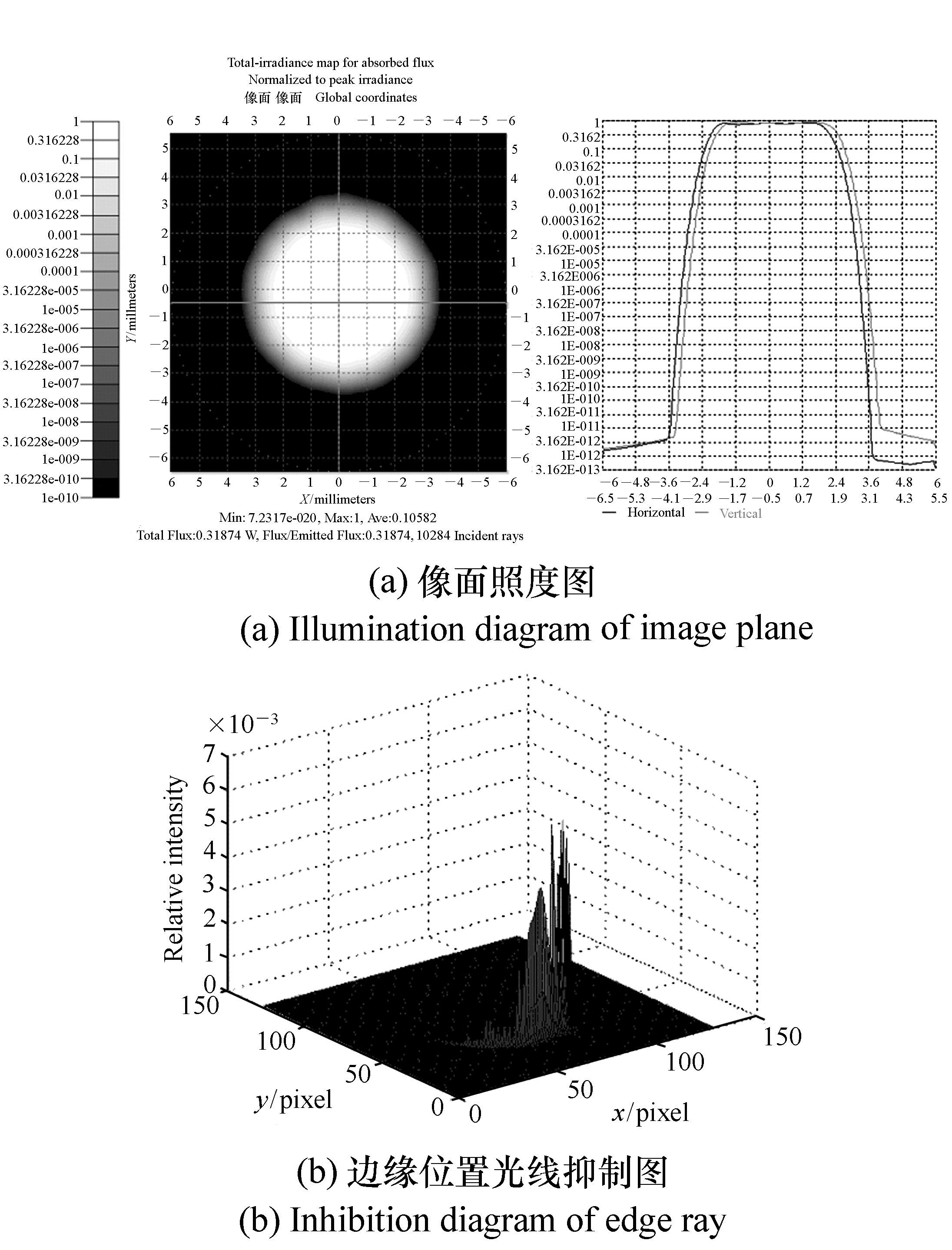
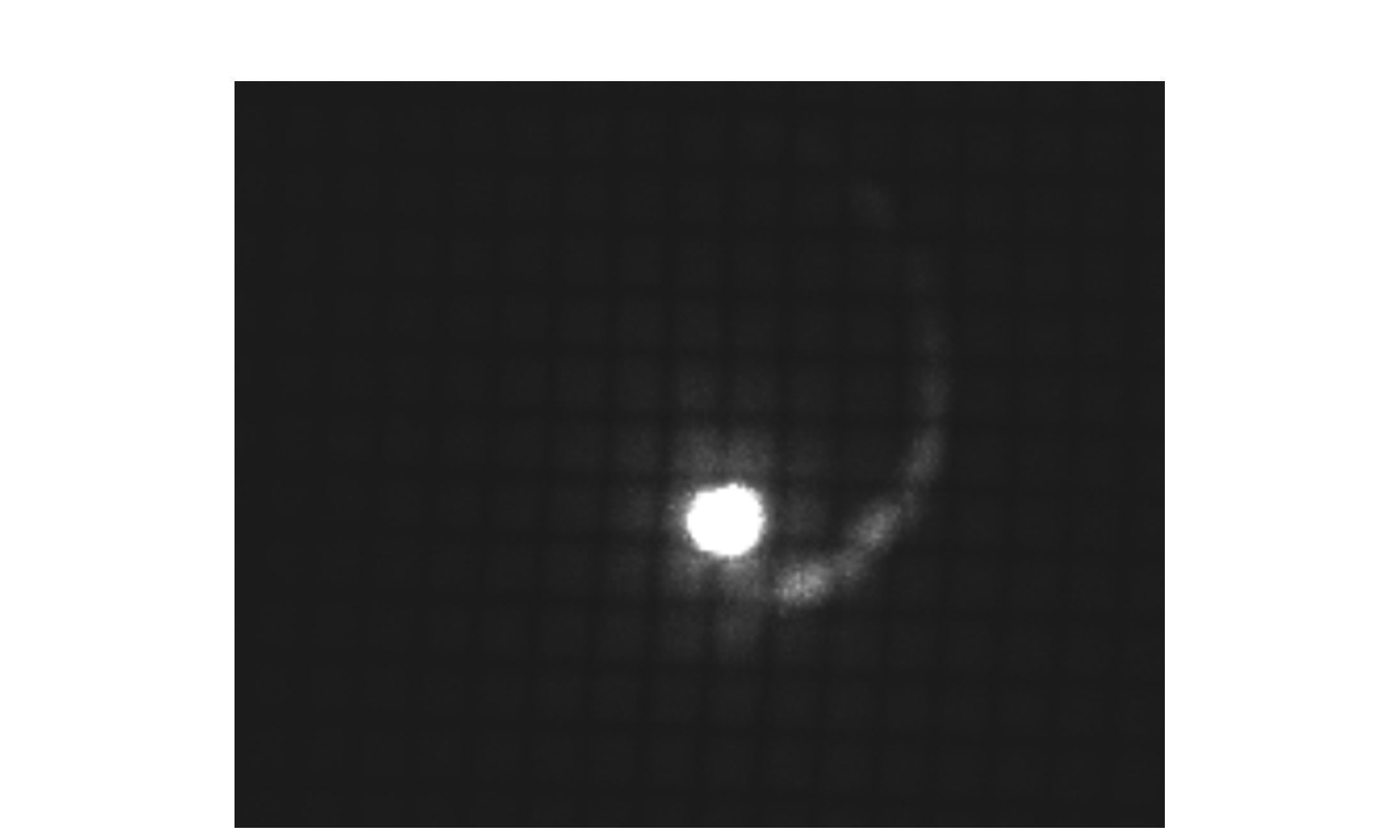
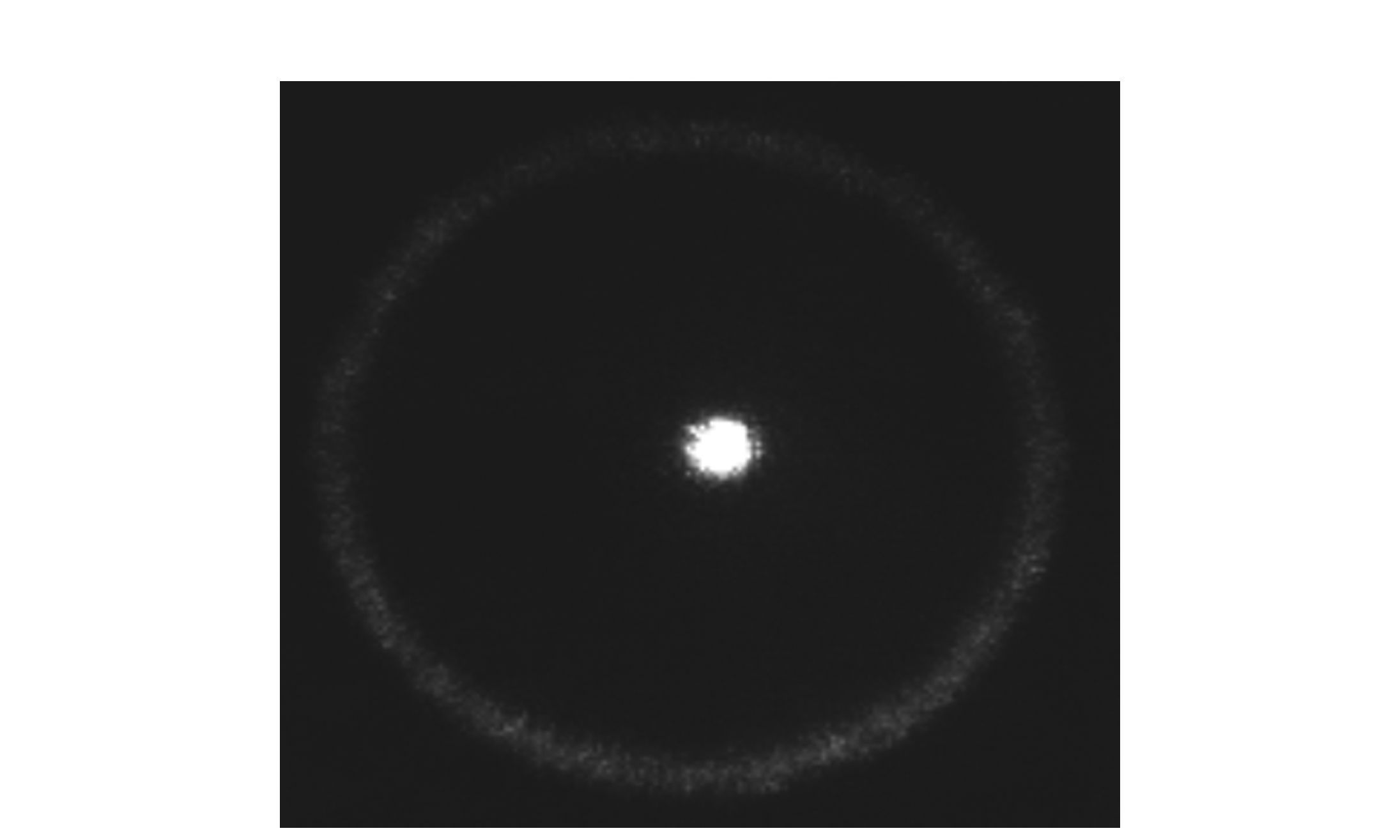
针对不同光学系统中存在的杂散光所造成的假信号或信号饱和影响,本文结合像面照度分析和消光环抑制的方法,对准直系统进行分析,找到产生杂散光的主要原因,设计了3种不同结构的消光环以消除杂散光。仿真实验结果确定了最优形式的消光环结构,边缘杂散光抑制最大下限值为0.38%,平均抑制值5.68×10-4%;以此模型为基础,进行了杂散光抑制实验。实验结果表明,带有消光环结构的准直系统可以有效抑制杂散光,保证了后续光学系统的功能实现,对其他杂散光抑制系统具有借鉴作用。
针对不同光学系统中存在的杂散光所造成的假信号或信号饱和影响,本文结合像面照度分析和消光环抑制的方法,对准直系统进行分析,找到产生杂散光的主要原因,设计了3种不同结构的消光环以消除杂散光。仿真实验结果确定了最优形式的消光环结构,边缘杂散光抑制最大下限值为0.38%,平均抑制值5.68×10-4%;以此模型为基础,进行了杂散光抑制实验。实验结果表明,带有消光环结构的准直系统可以有效抑制杂散光,保证了后续光学系统的功能实现,对其他杂散光抑制系统具有借鉴作用。






2016, 9(6): 671-677.
doi: 10.3788/CO.20160906.0671
摘要:
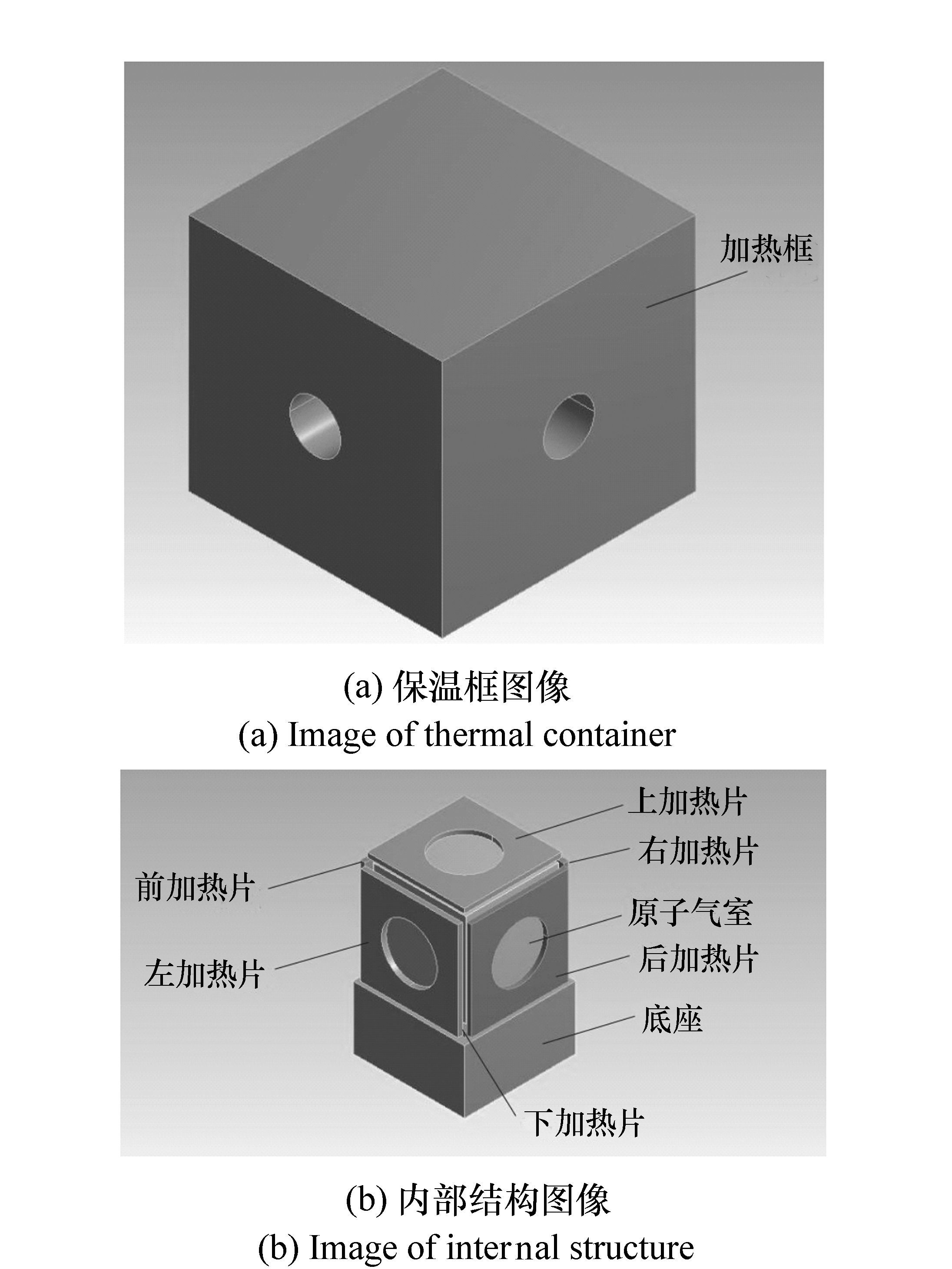
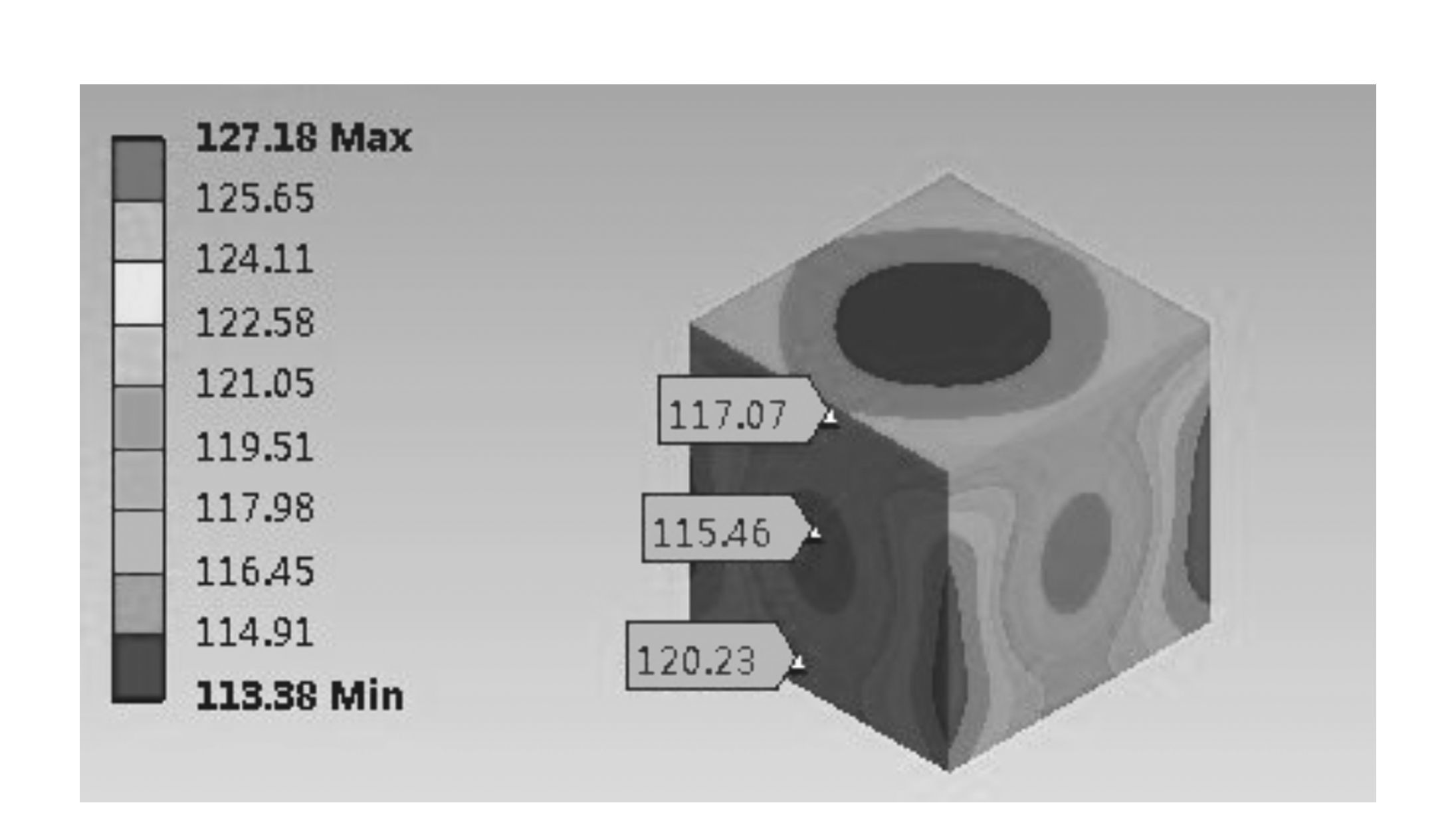
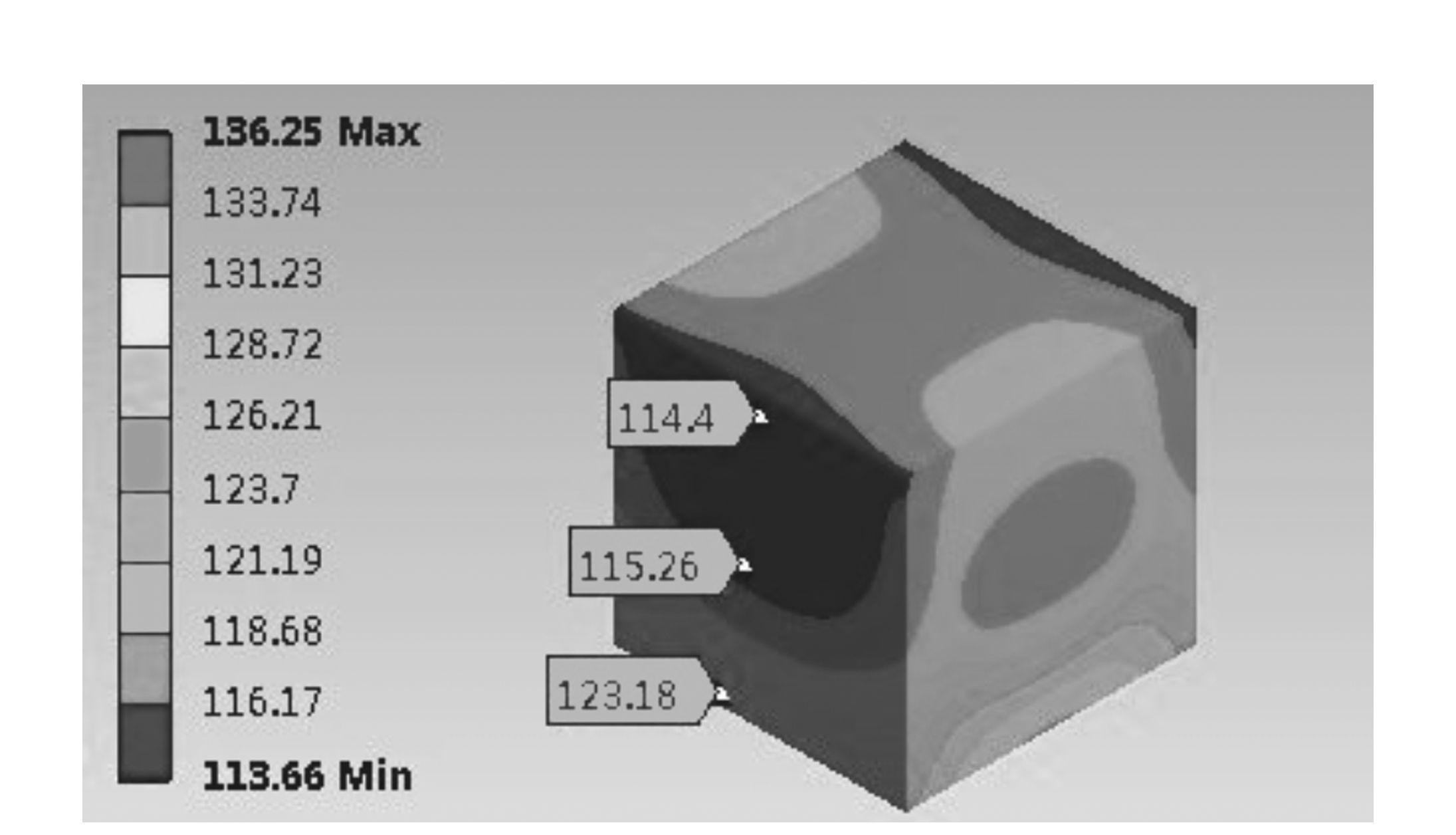
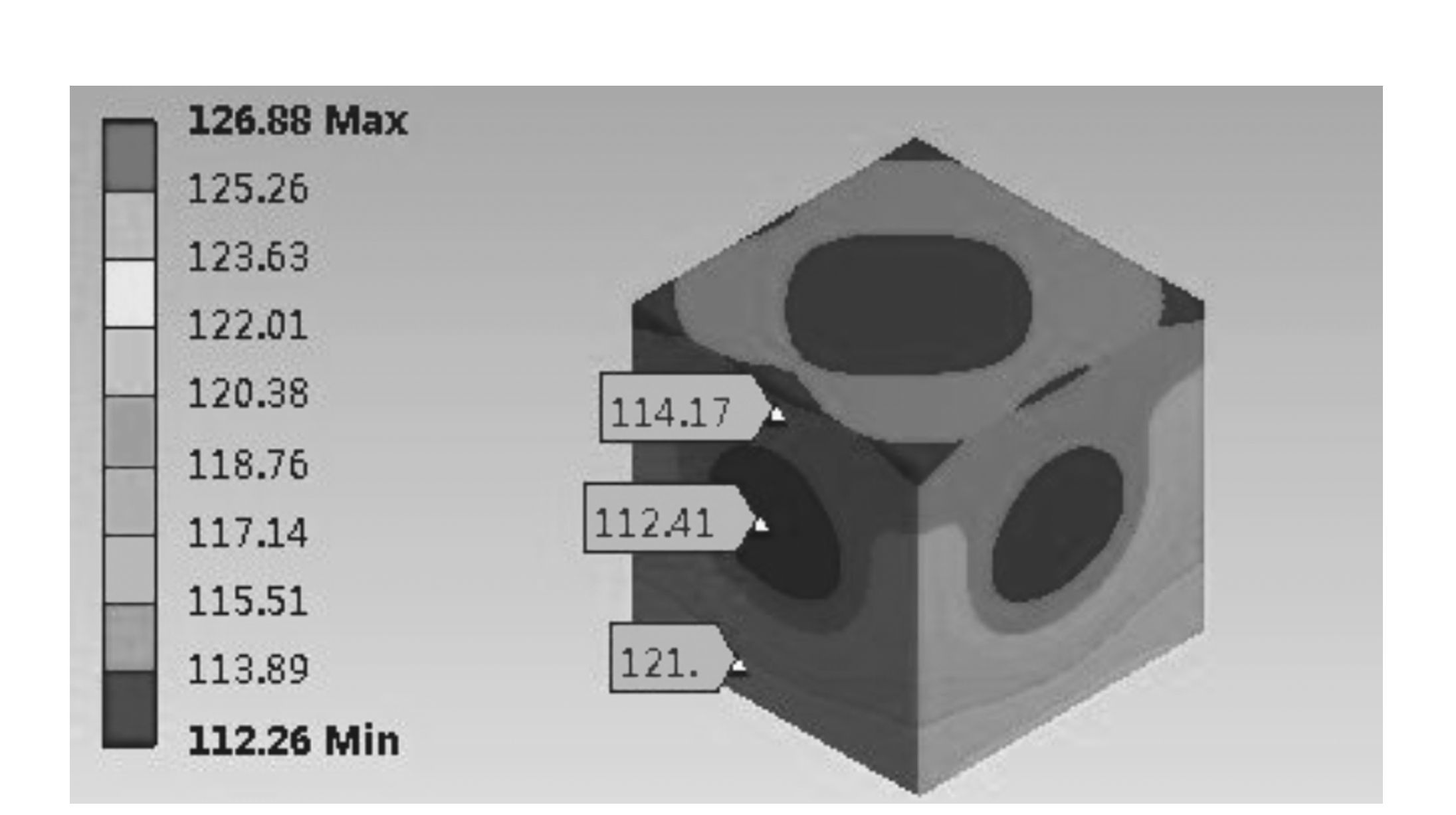
为研究核磁共振陀螺中加热机构对原子气室性能的影响,设计了5种典型加热方式。利用有限元分析软件ANSYS建立了原子气室的温度场模型,给出了原子气室表面的稳态温度场分布情况。同时设计了探测精度为0.01℃的测温电路,对原子气室表面不同位置的温度进行监控,获得了不同加热方式下原子气室表面的温度变化情况。将仿真和实验结果进行比较,发现误差在5%之内,验证了仿真模型的正确性。综合仿真和实验结果比较了不同加热方式下原子气室表面温度分布情况,获得了能够使原子气室表面温度分布最均匀的加热方式。
为研究核磁共振陀螺中加热机构对原子气室性能的影响,设计了5种典型加热方式。利用有限元分析软件ANSYS建立了原子气室的温度场模型,给出了原子气室表面的稳态温度场分布情况。同时设计了探测精度为0.01℃的测温电路,对原子气室表面不同位置的温度进行监控,获得了不同加热方式下原子气室表面的温度变化情况。将仿真和实验结果进行比较,发现误差在5%之内,验证了仿真模型的正确性。综合仿真和实验结果比较了不同加热方式下原子气室表面温度分布情况,获得了能够使原子气室表面温度分布最均匀的加热方式。





2016, 9(6): 678-686.
doi: 10.3788/CO.20160906.0678
摘要:
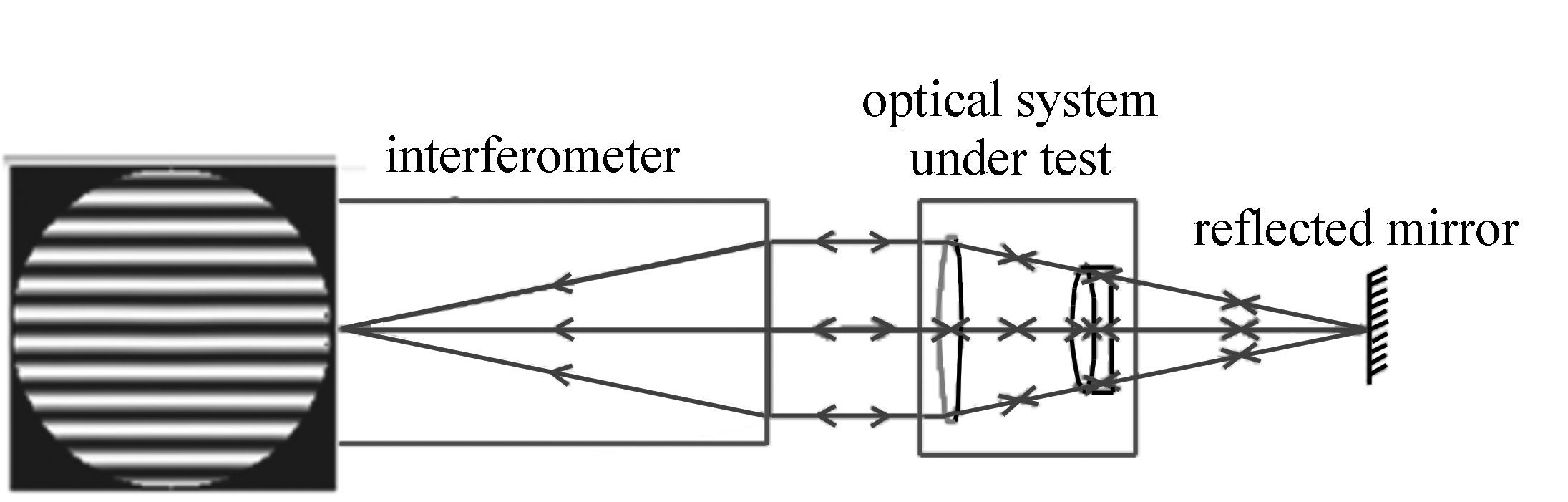
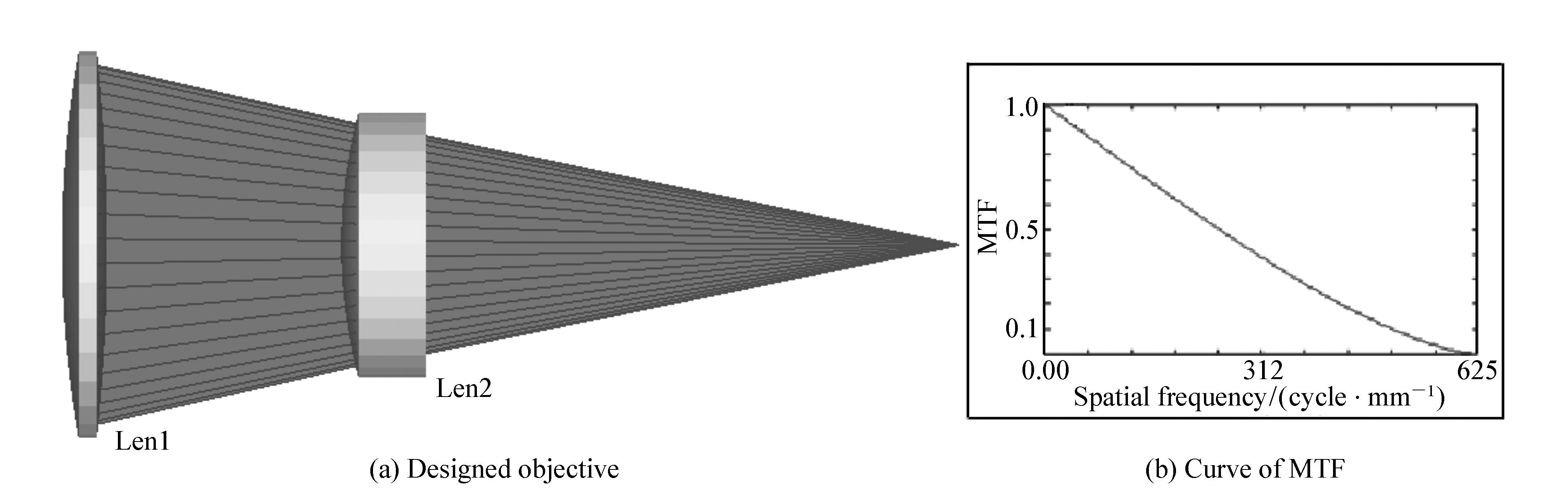
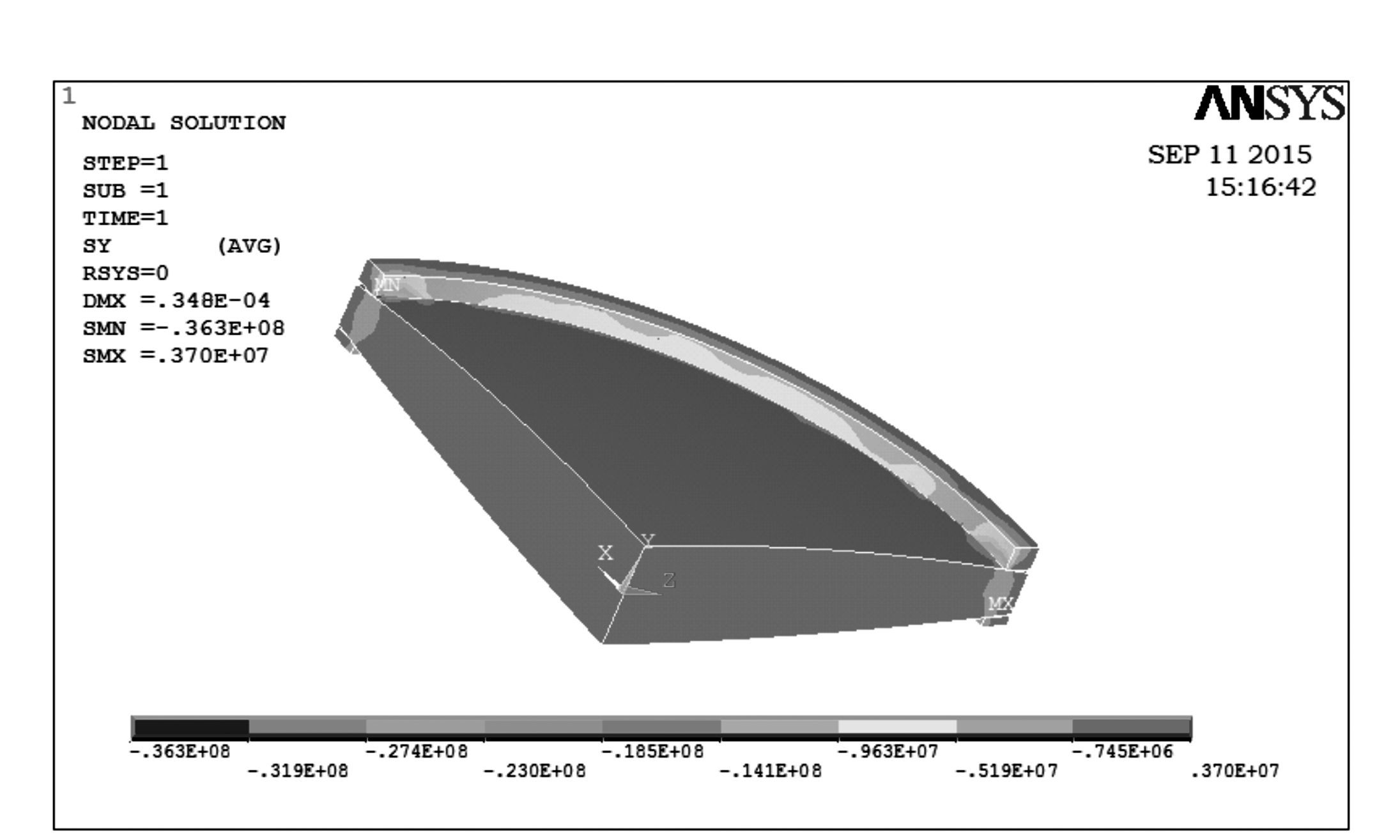
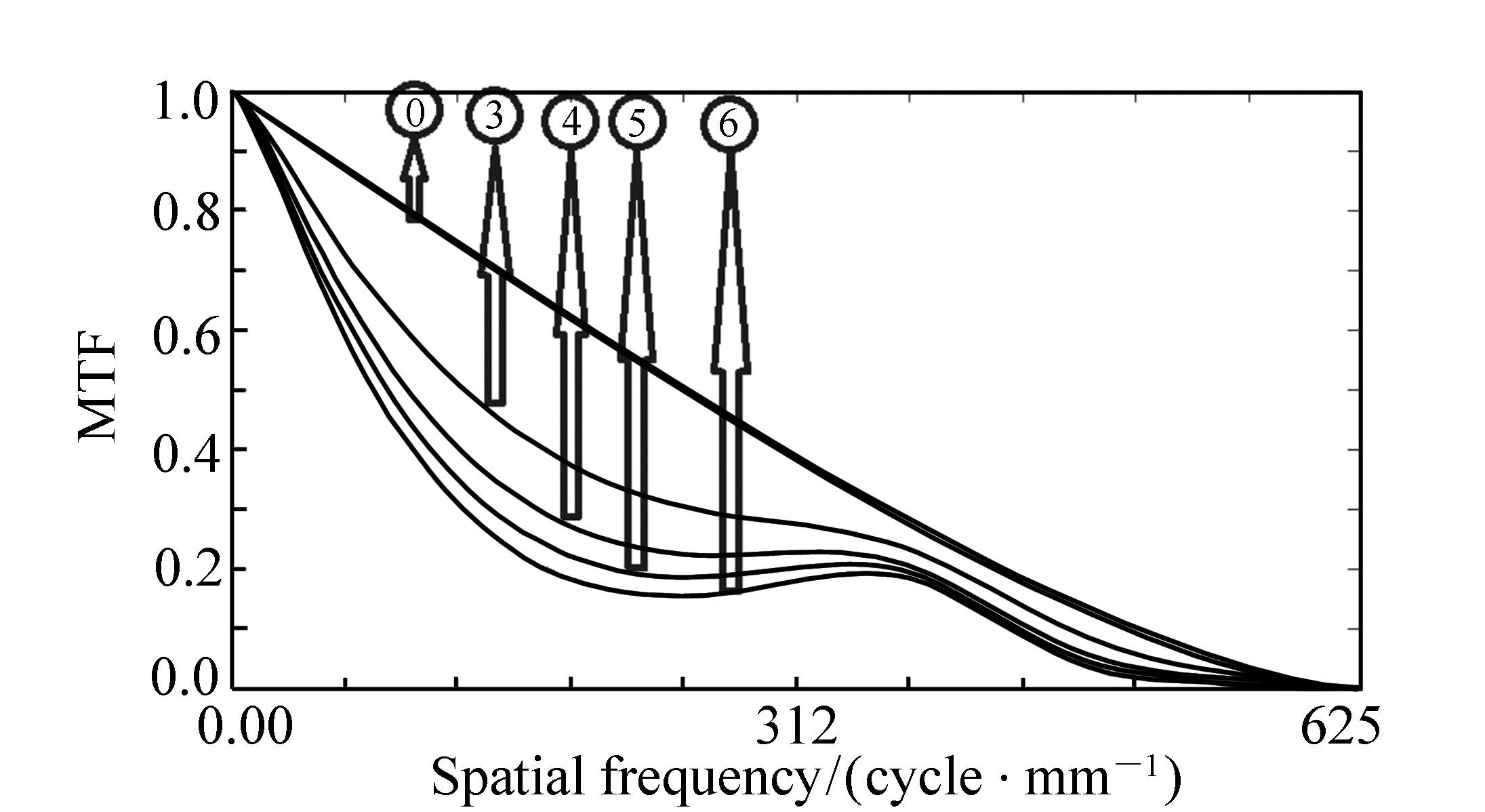
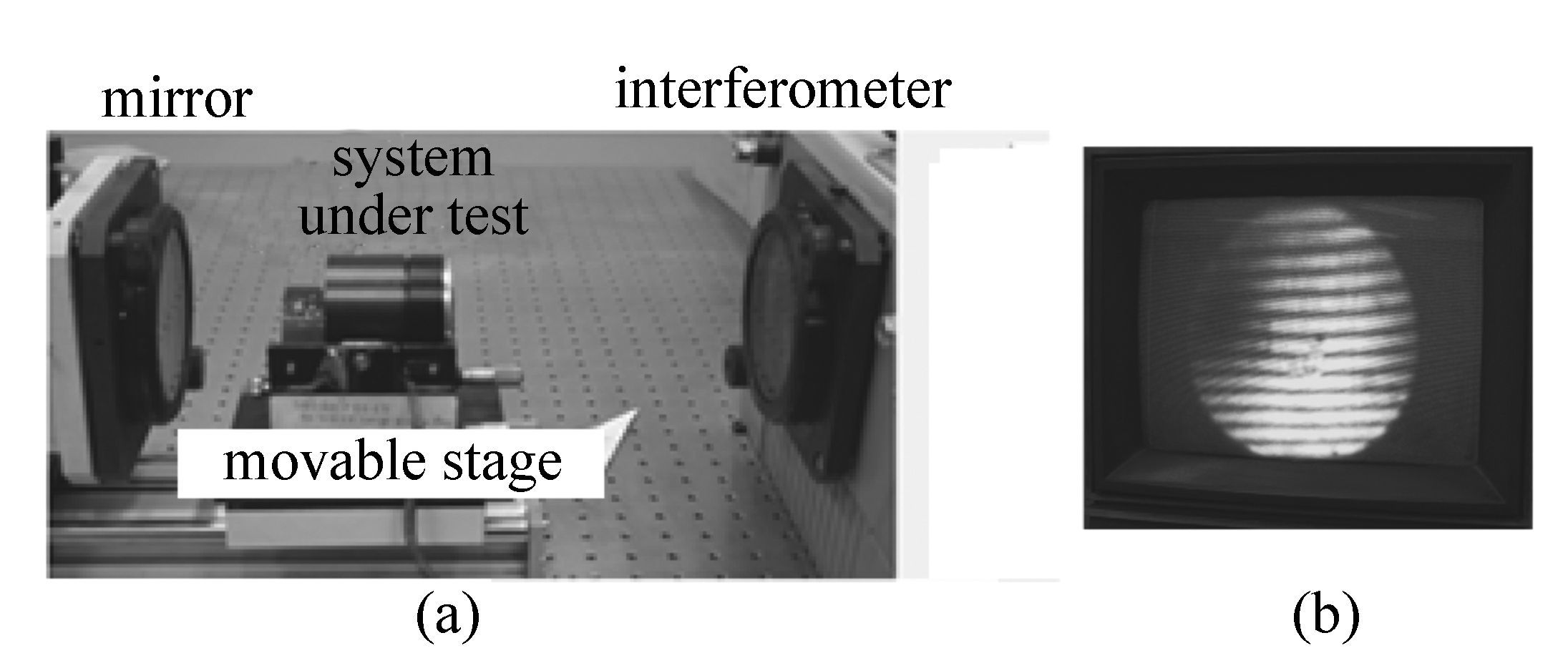
本文通过计算预测光学性能的方法表征在光学系统组装和外界环境因素影响下的光学系统灵敏度。该方法即通过调制传递函数来表征静态机械应力对光学物镜性能的影响。采用光学干涉仪对经过加工、组装且存在机械应力的光学物镜进行测试,并比较实验调制传递函数与计算模拟分析的调制传递函数。结果表明,计算结果与实验结果相符,证实了本文方法的有效性。
本文通过计算预测光学性能的方法表征在光学系统组装和外界环境因素影响下的光学系统灵敏度。该方法即通过调制传递函数来表征静态机械应力对光学物镜性能的影响。采用光学干涉仪对经过加工、组装且存在机械应力的光学物镜进行测试,并比较实验调制传递函数与计算模拟分析的调制传递函数。结果表明,计算结果与实验结果相符,证实了本文方法的有效性。







2016, 9(6): 687-694.
doi: 10.3788/CO.20160906.0687
摘要:
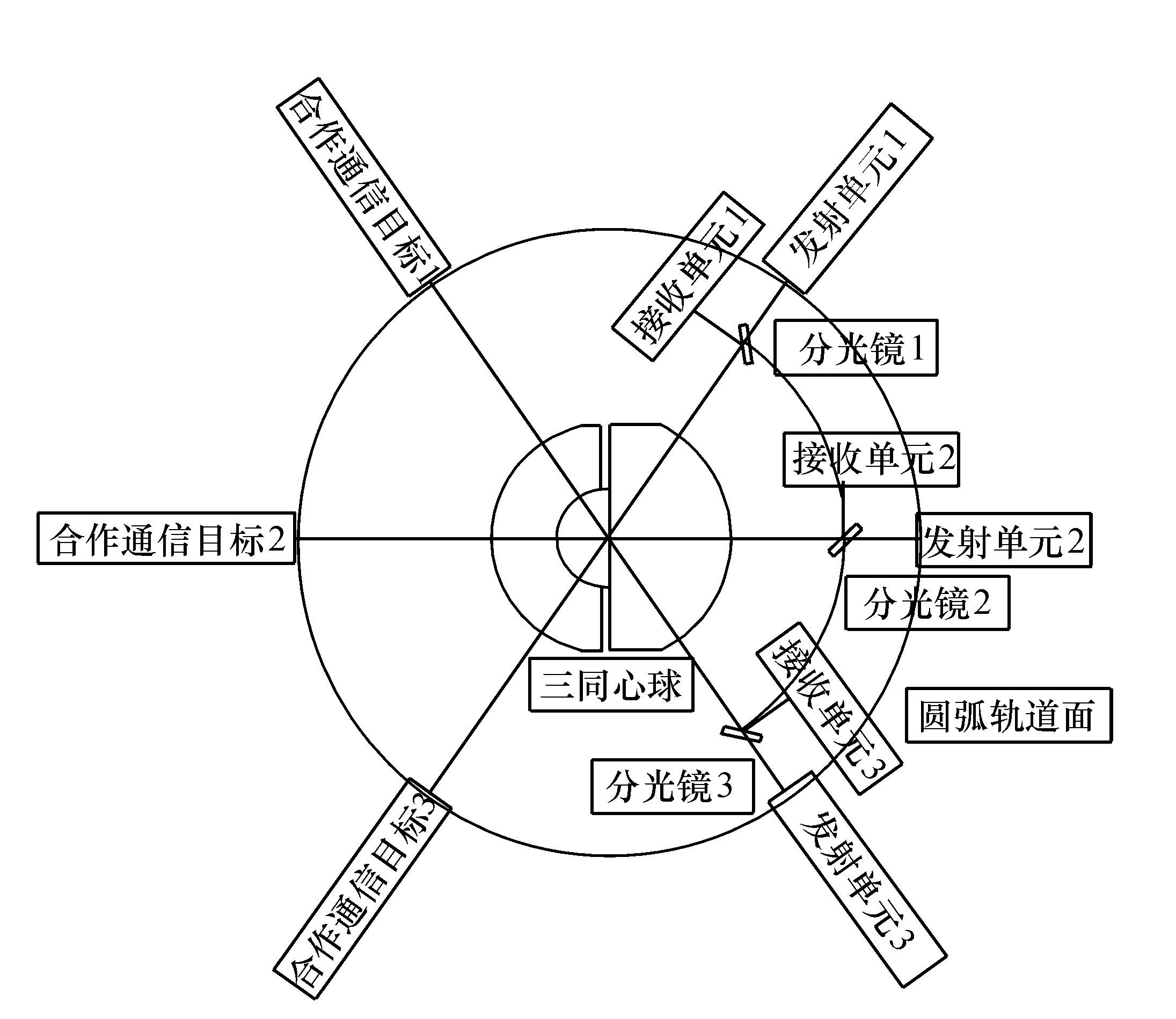
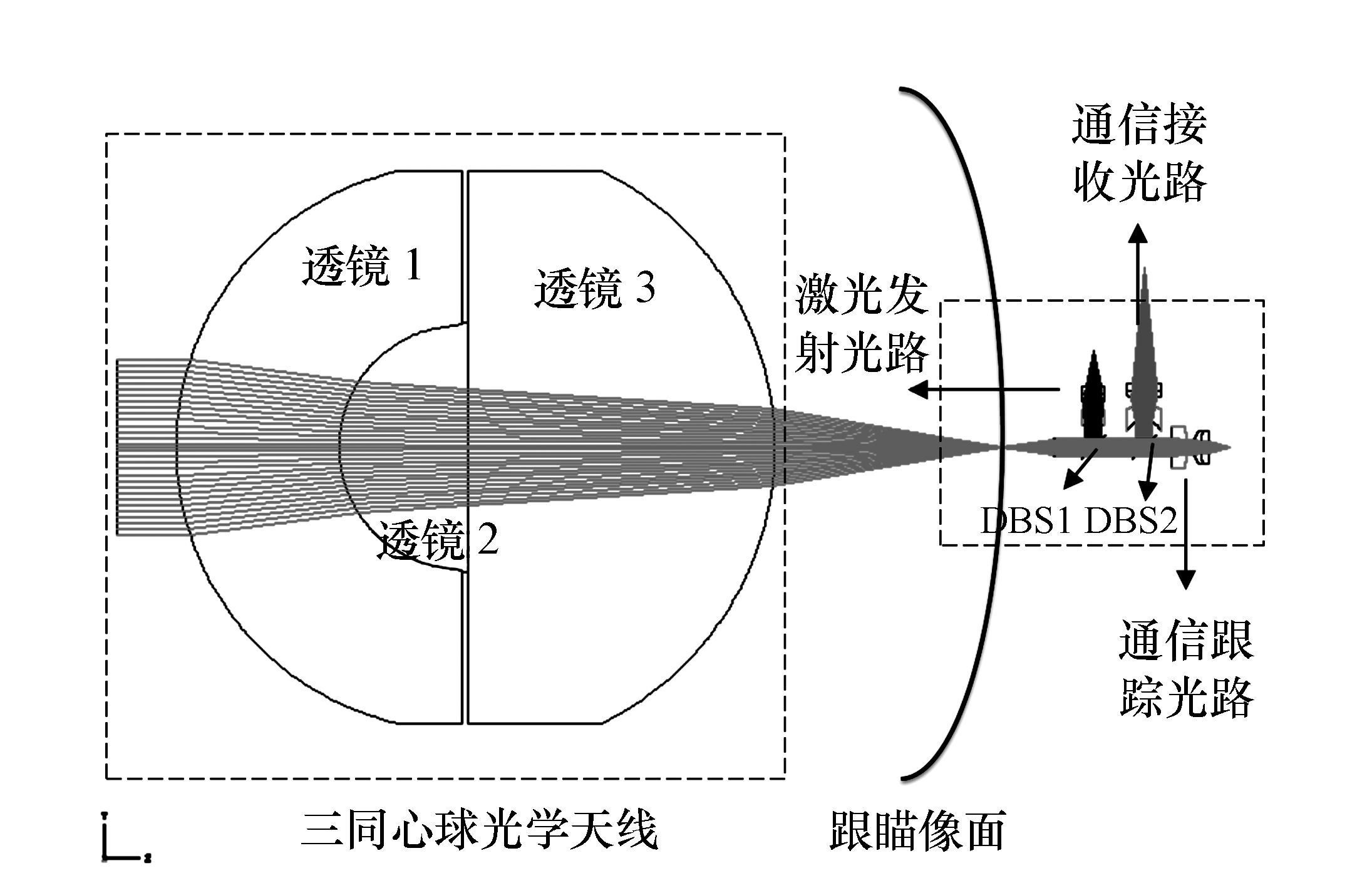
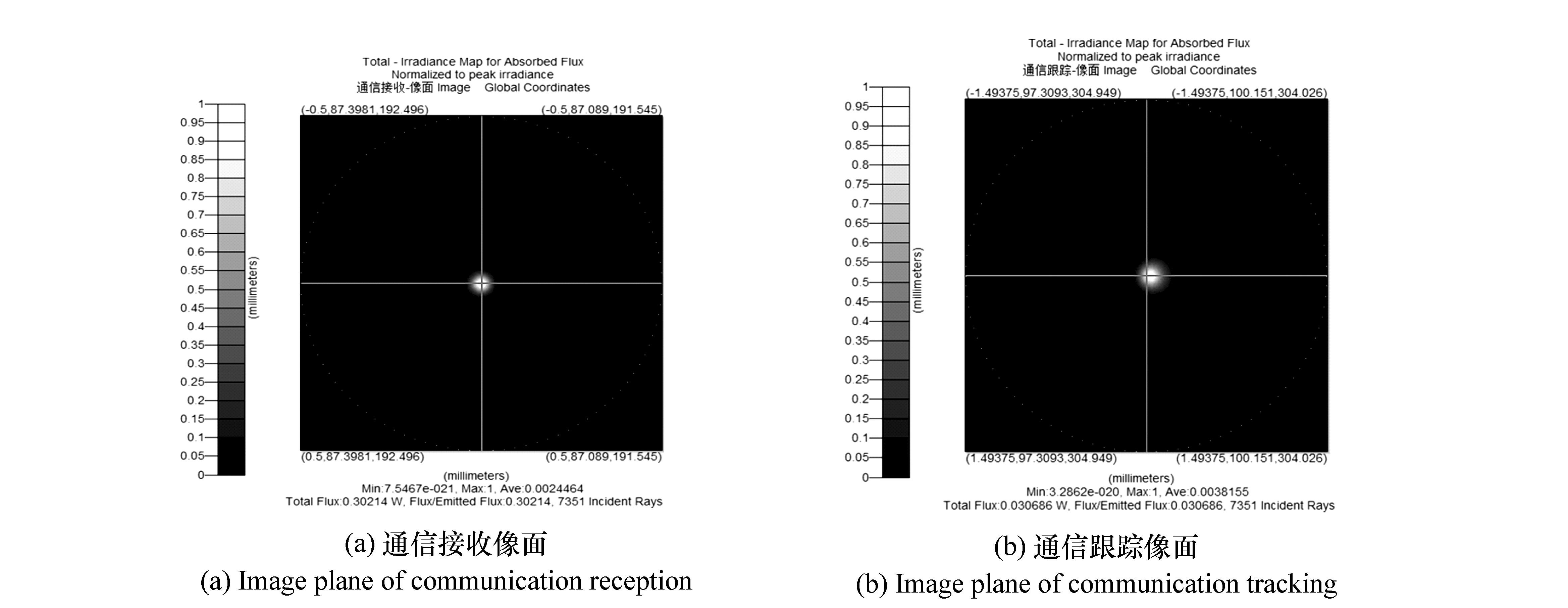
针对独有的跟踪方式,具体讨论了激光通信三同心球光学系统的跟瞄方案,并进行了具体规划。通过对通信跟踪光路和通信接收光路的视场和精度分析,给出了二者的相关参数,作为Matlab理论计算跟踪像面轨道的依据。利用Tracepro软件模拟了引入相关误差量后的通信跟踪和通信接收像面光斑质心偏移和光斑大小变化情况。仿真结果显示:随着角度的旋转,通信接收的质心偏差在±4 μm范围内,通信跟踪的质心偏差在±50 μm范围内;通信接收像面光斑直径小于80 μm,通信跟踪像面光斑直径均在400 μm以内。系统所引入的误差在允许范围之内,不影响相关跟踪通信功能。
针对独有的跟踪方式,具体讨论了激光通信三同心球光学系统的跟瞄方案,并进行了具体规划。通过对通信跟踪光路和通信接收光路的视场和精度分析,给出了二者的相关参数,作为Matlab理论计算跟踪像面轨道的依据。利用Tracepro软件模拟了引入相关误差量后的通信跟踪和通信接收像面光斑质心偏移和光斑大小变化情况。仿真结果显示:随着角度的旋转,通信接收的质心偏差在±4 μm范围内,通信跟踪的质心偏差在±50 μm范围内;通信接收像面光斑直径小于80 μm,通信跟踪像面光斑直径均在400 μm以内。系统所引入的误差在允许范围之内,不影响相关跟踪通信功能。




2016, 9(6): 695-703.
doi: 10.3788/CO.20160906.0695
摘要:
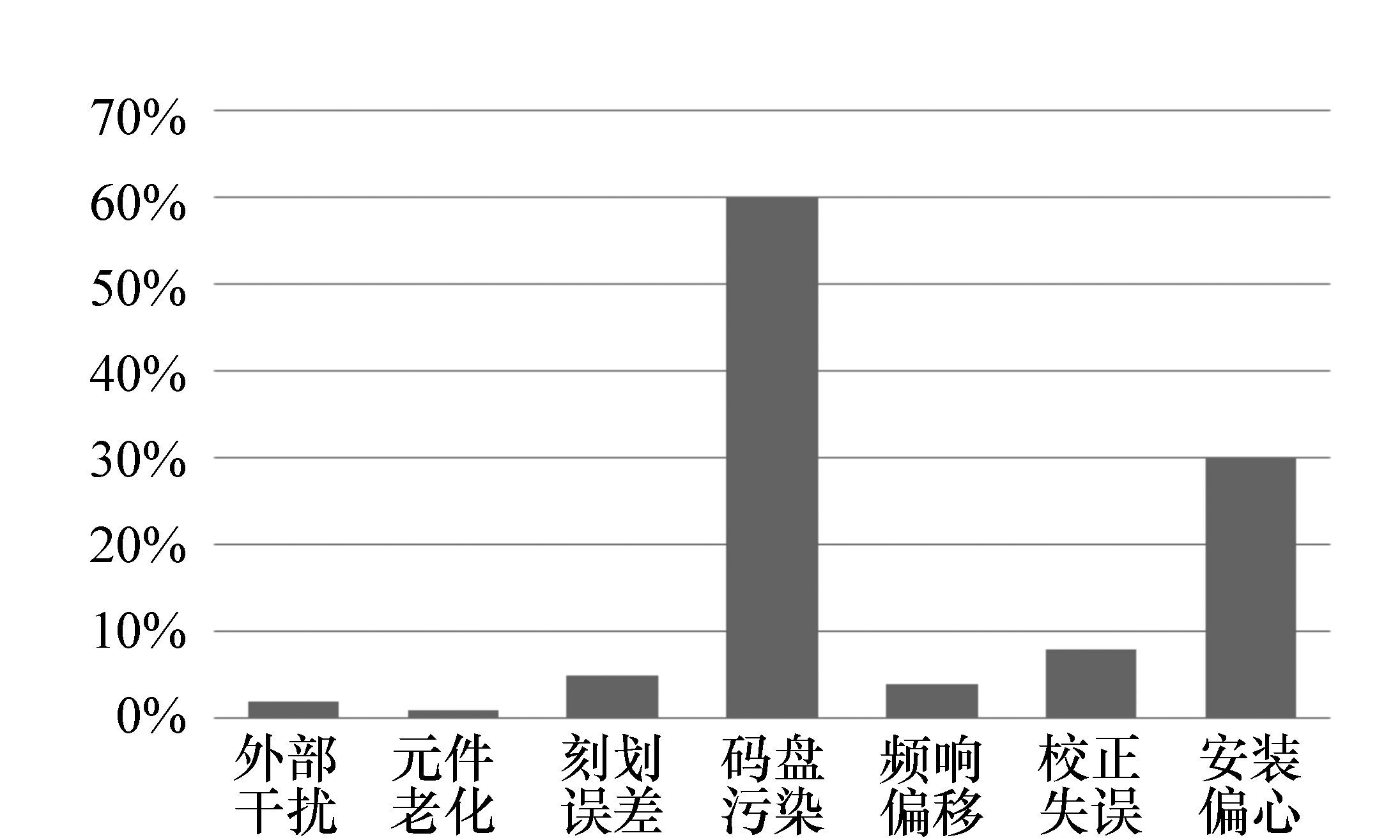
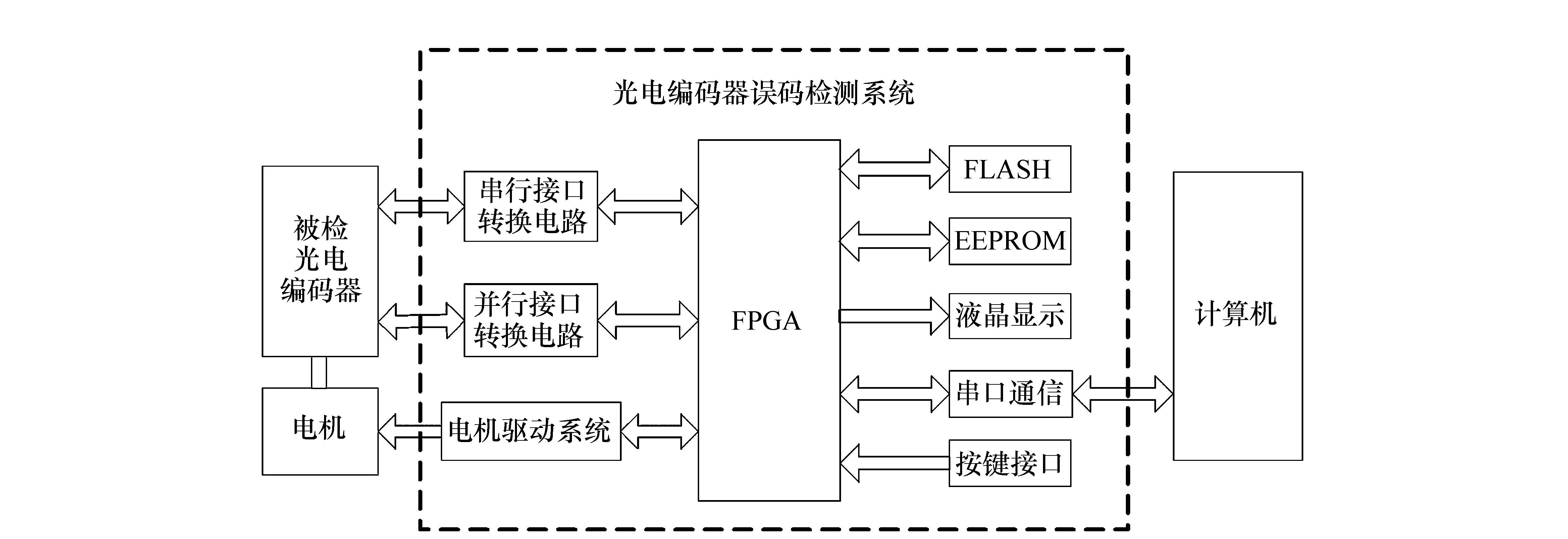
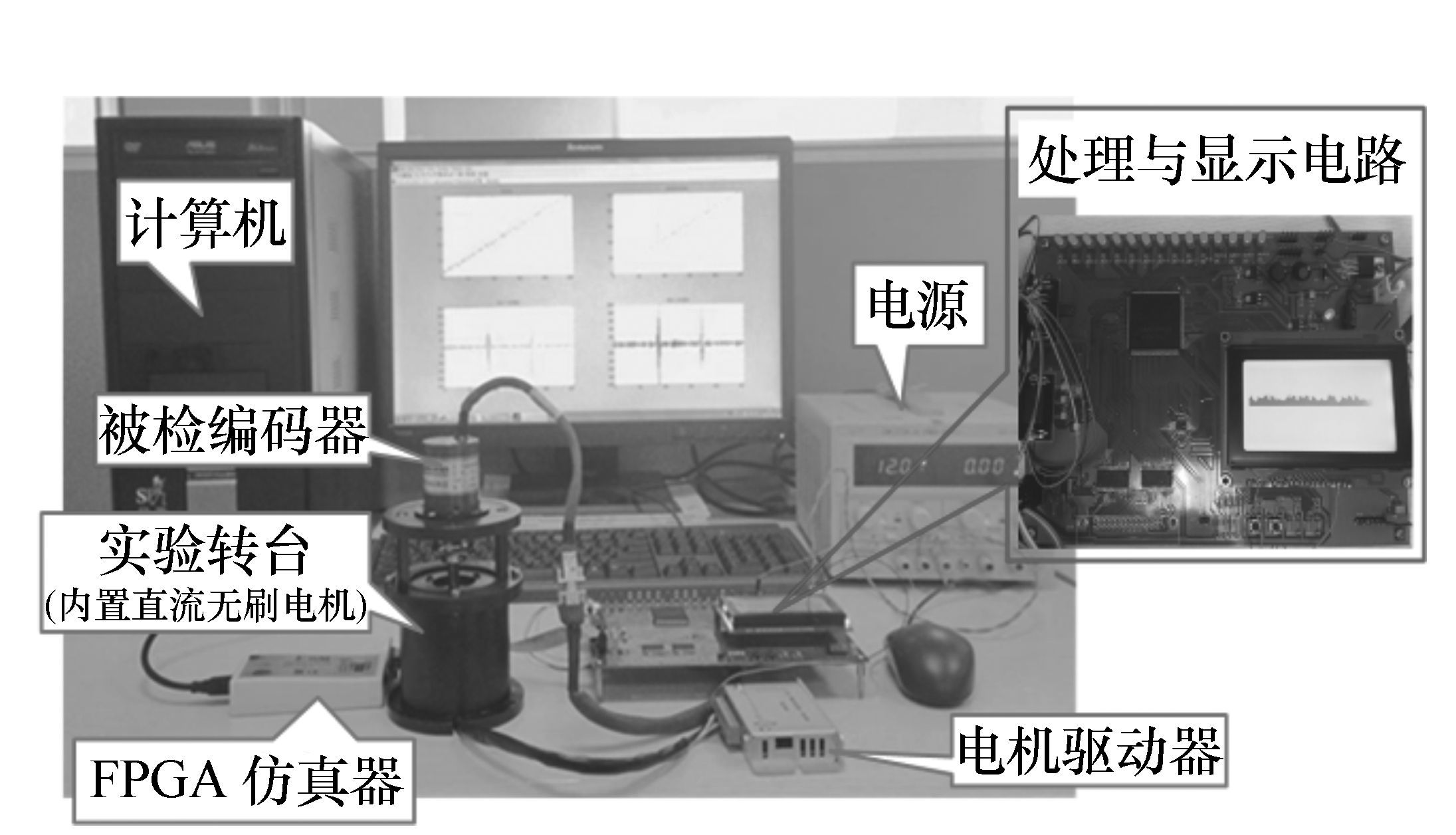
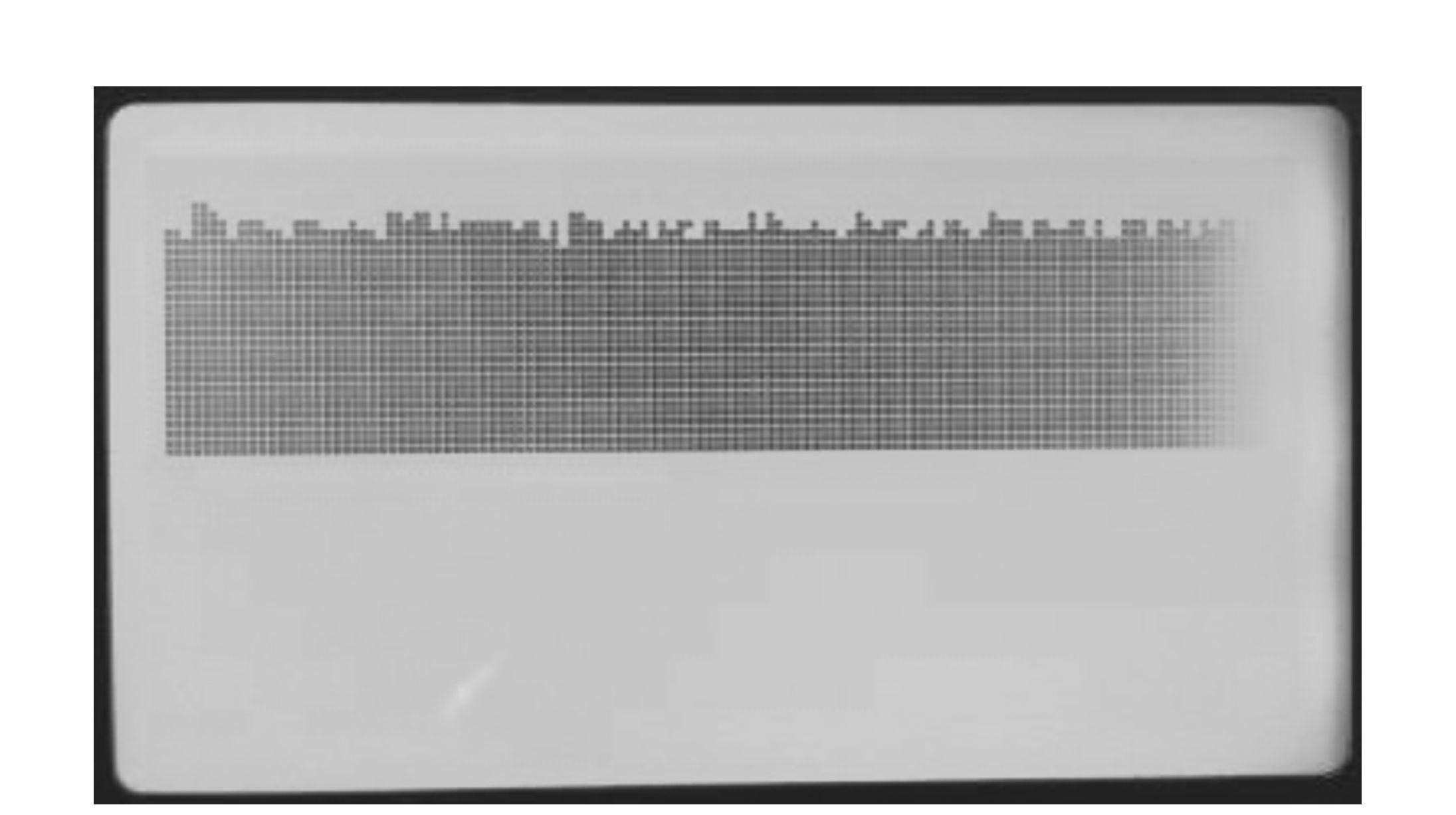
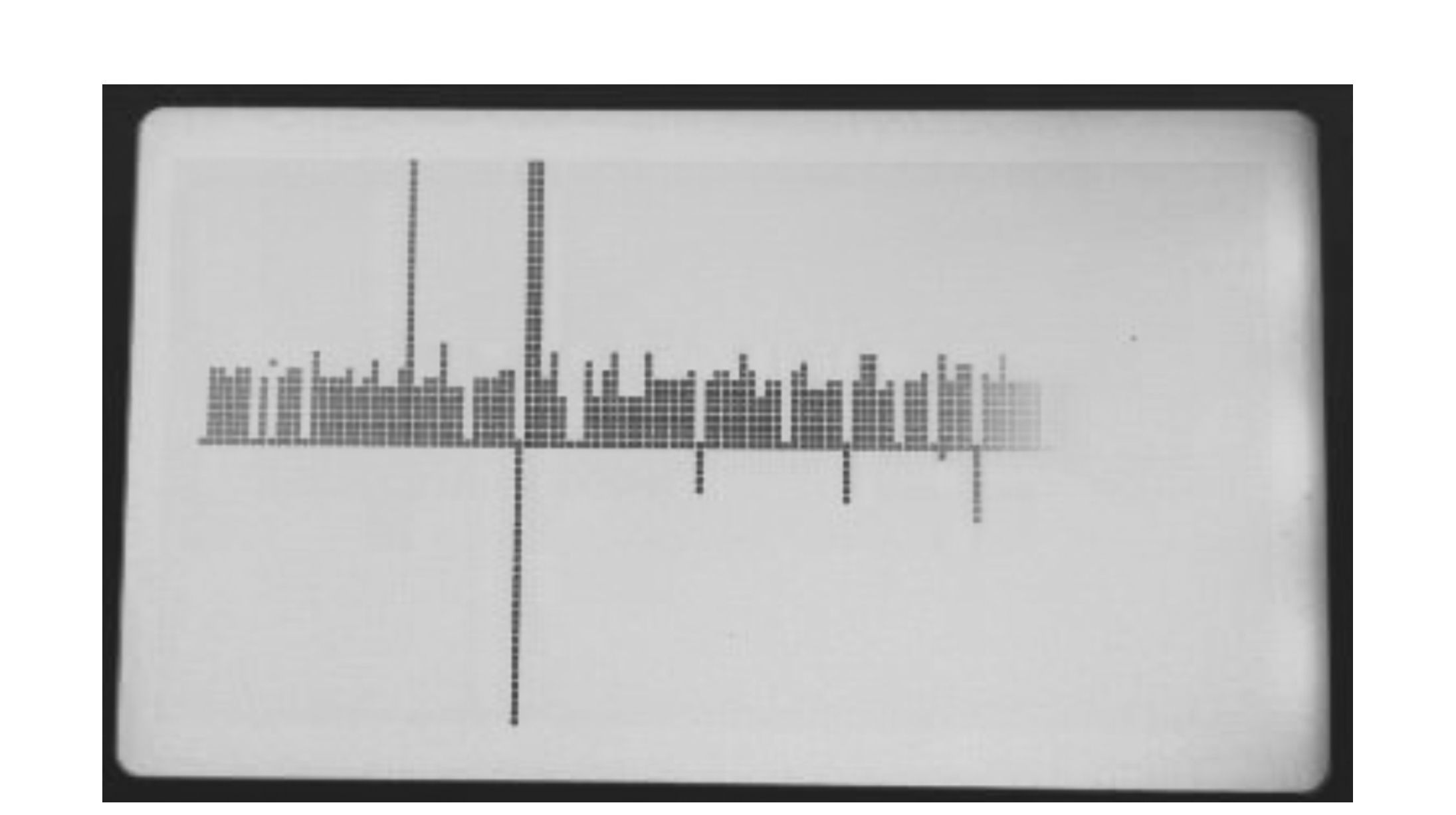
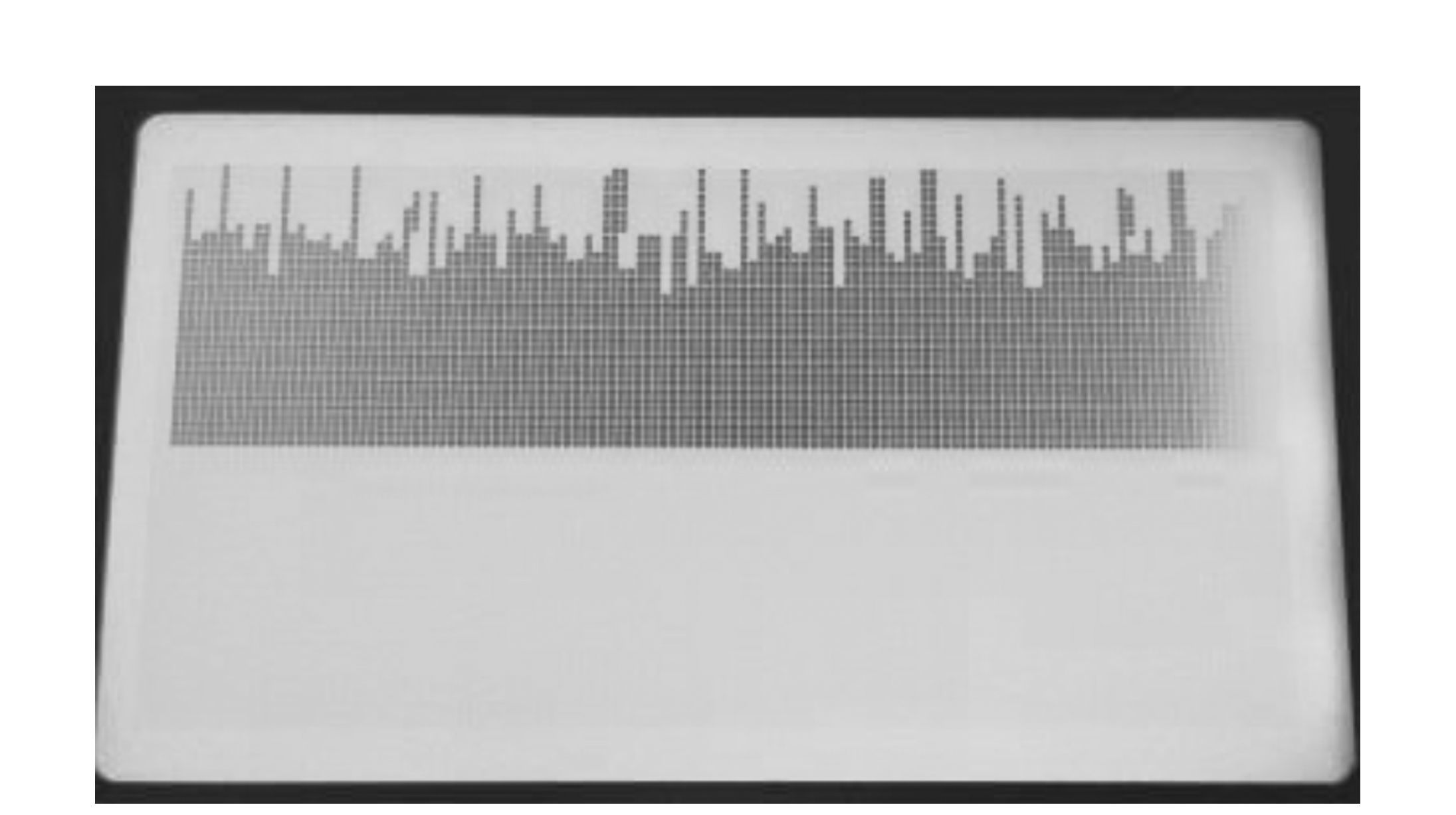
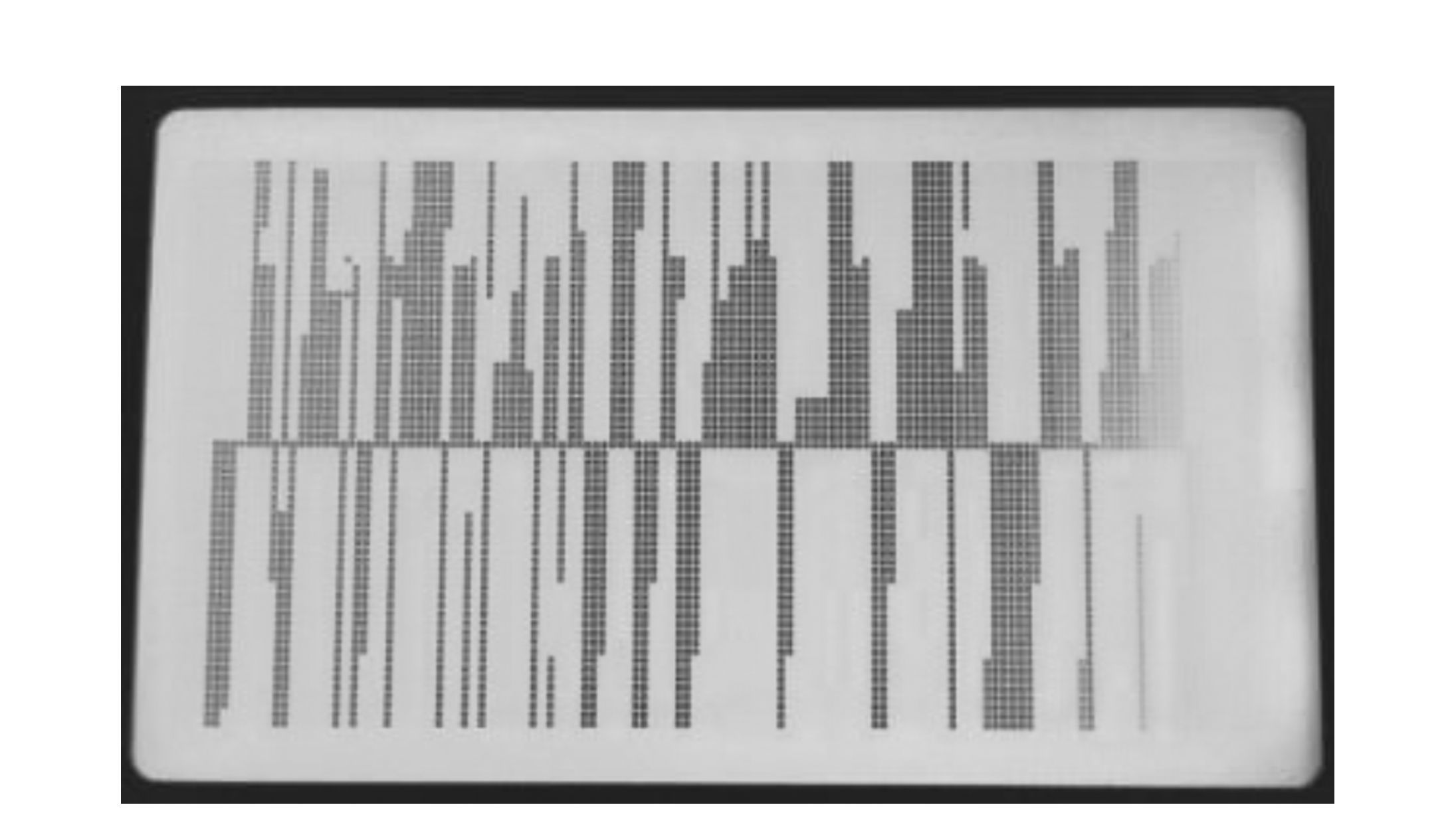
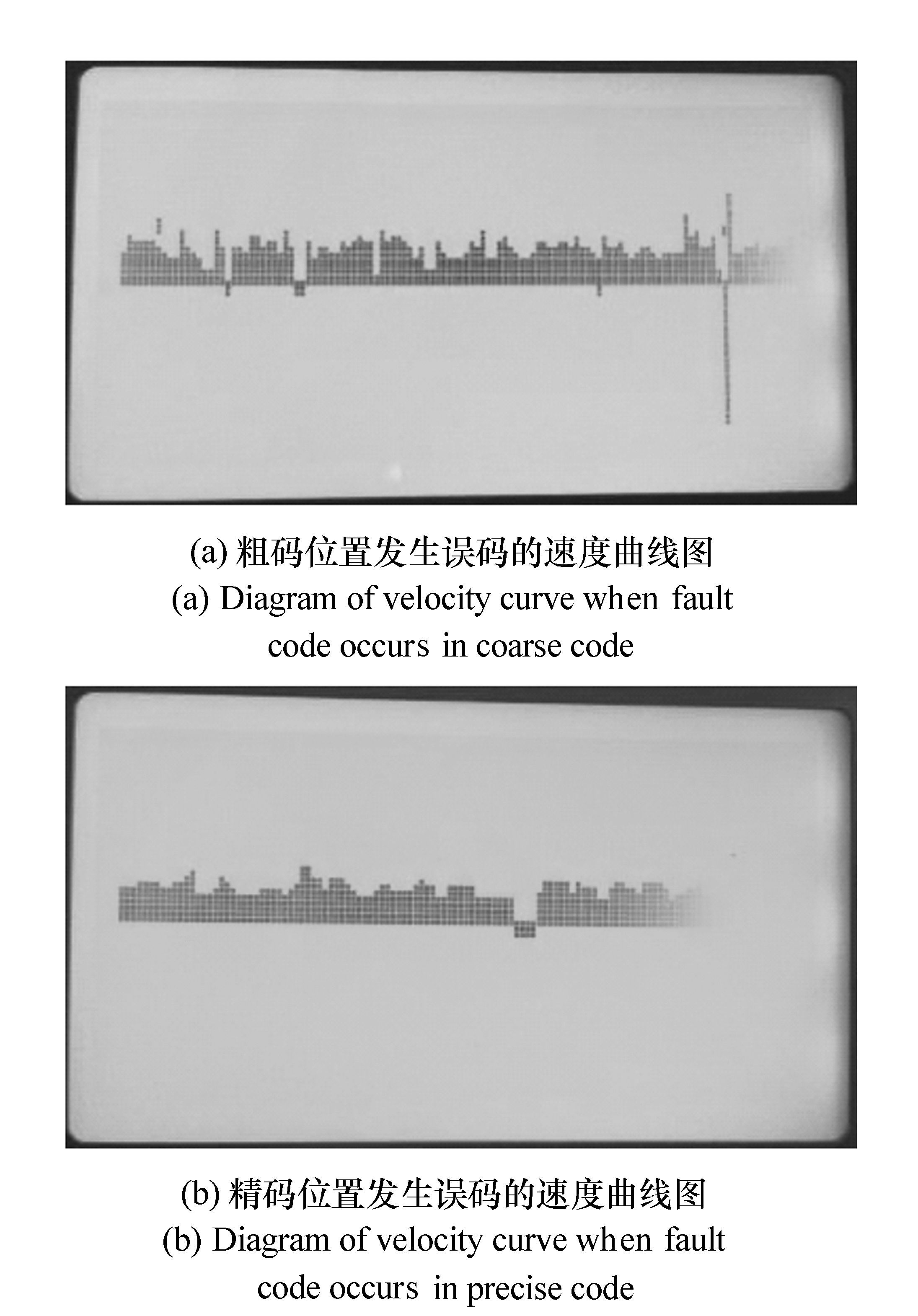
在批量生产光电编码器时,对光电编码器是否存在误码进行检测是一个重要的环节。现有的检测方法采用二进制灯排手动转动编码器用肉眼进行观测,存在手动检测慢、肉眼观测误差较大、检测结果受转动速度影响等缺点。在大批量生产的光电编码器,采用传统方法进行误码检测费时费力。为解决编码器生产及使用过程中对光电编码器的自动误差检测,本文设计了小型光电编码器误码自动检测系统。首先,在参照大量光电编码器生产经验的基础上,分析了编码器误码产生的主要原因;然后,提出了基于微分算法实现对光电编码器是否存在误码进行判断的误码自动检测方法;最后,以FPGA为主控芯片,设计了小型光电编码器自动误码检测系统。该系统能够实现对光电编码器的高速数据采集、数据处理与误码判断,并将误码判断结果通过LCD液晶显示。同时,可以根据需要将数据传输到计算机中作进一步分析。检测实验表明:本文所设计的误码检测系统成功实现了对15位串/并口光电编码器在高速和低速下进行数据采集及误码判断。系统可用于批量生产下光电编码器的误码自动检测,减少了人工操作,提高了自动化程度。系统具有智能便捷,移动性强,适用于实验室及各种工作场合下的误码检测等优点,检测速度较以往检测方法提高了3~5倍。
在批量生产光电编码器时,对光电编码器是否存在误码进行检测是一个重要的环节。现有的检测方法采用二进制灯排手动转动编码器用肉眼进行观测,存在手动检测慢、肉眼观测误差较大、检测结果受转动速度影响等缺点。在大批量生产的光电编码器,采用传统方法进行误码检测费时费力。为解决编码器生产及使用过程中对光电编码器的自动误差检测,本文设计了小型光电编码器误码自动检测系统。首先,在参照大量光电编码器生产经验的基础上,分析了编码器误码产生的主要原因;然后,提出了基于微分算法实现对光电编码器是否存在误码进行判断的误码自动检测方法;最后,以FPGA为主控芯片,设计了小型光电编码器自动误码检测系统。该系统能够实现对光电编码器的高速数据采集、数据处理与误码判断,并将误码判断结果通过LCD液晶显示。同时,可以根据需要将数据传输到计算机中作进一步分析。检测实验表明:本文所设计的误码检测系统成功实现了对15位串/并口光电编码器在高速和低速下进行数据采集及误码判断。系统可用于批量生产下光电编码器的误码自动检测,减少了人工操作,提高了自动化程度。系统具有智能便捷,移动性强,适用于实验室及各种工作场合下的误码检测等优点,检测速度较以往检测方法提高了3~5倍。





2016, 9(6): 704-712.
doi: 10.3788/CO.20160906.0704
摘要:
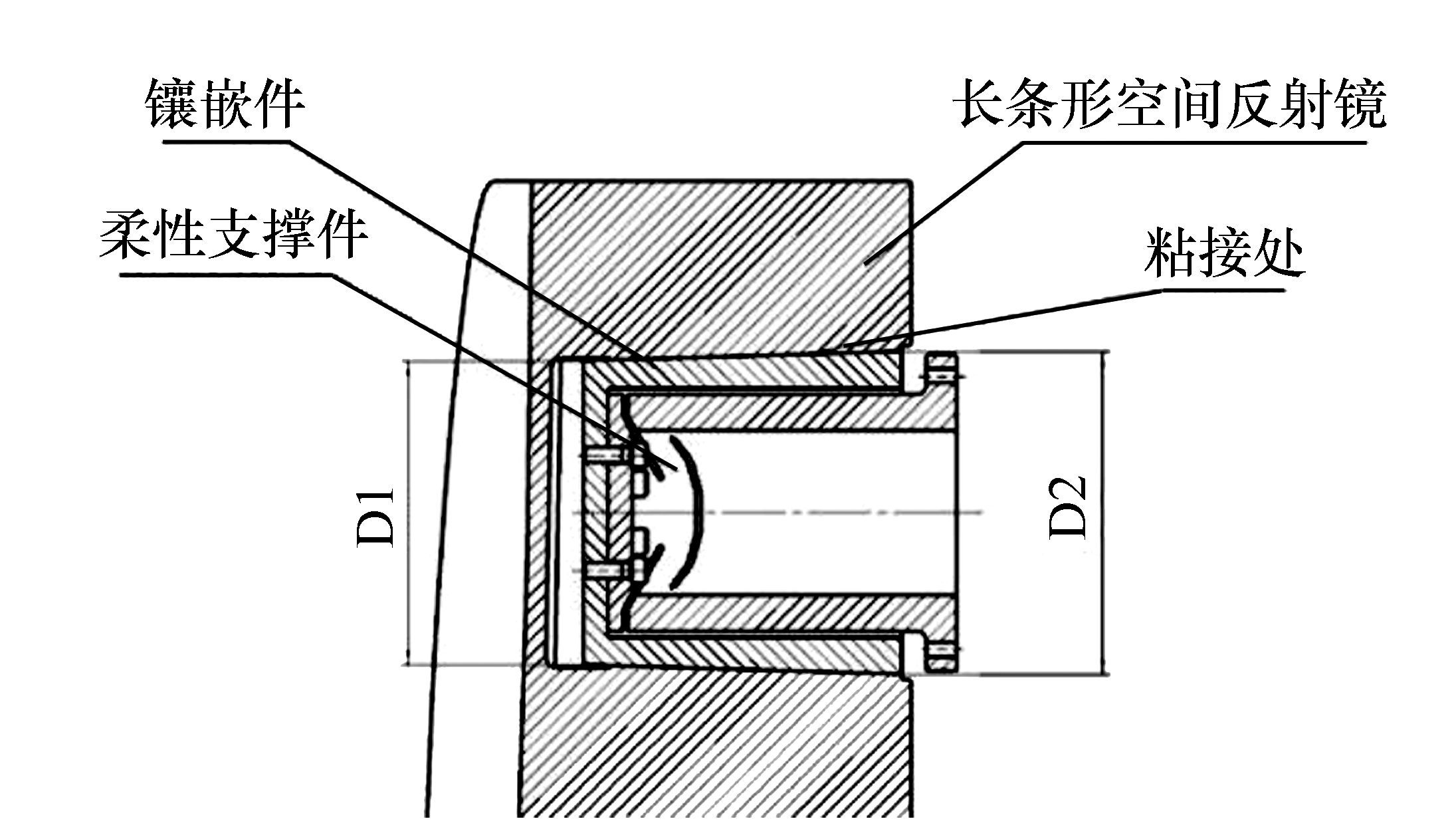
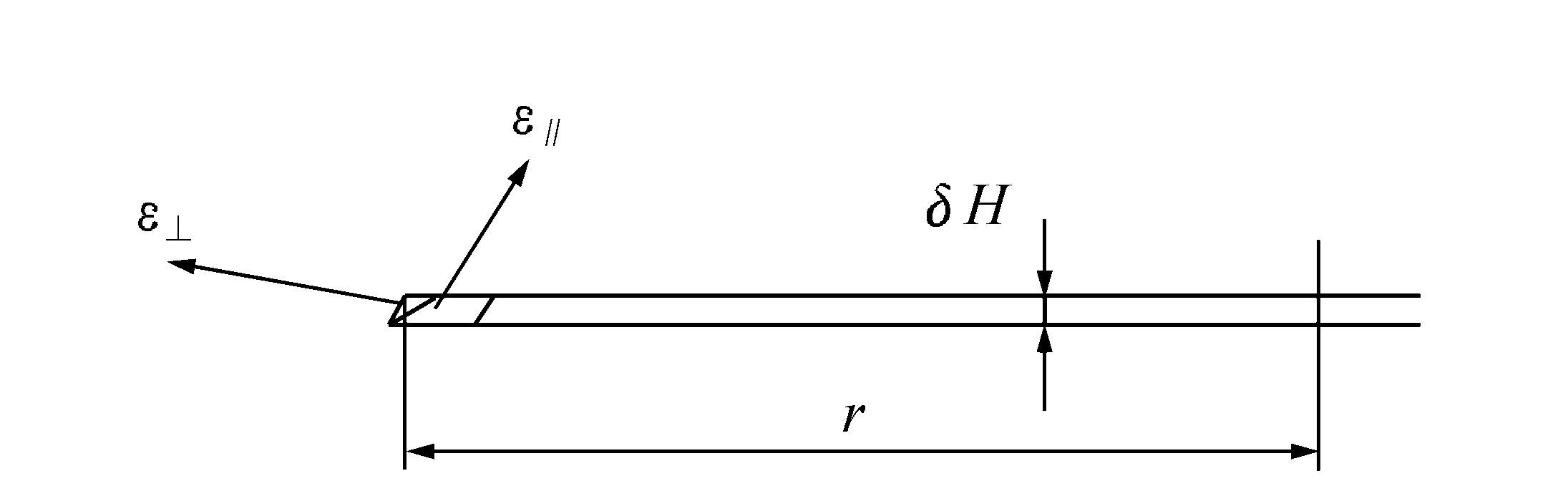
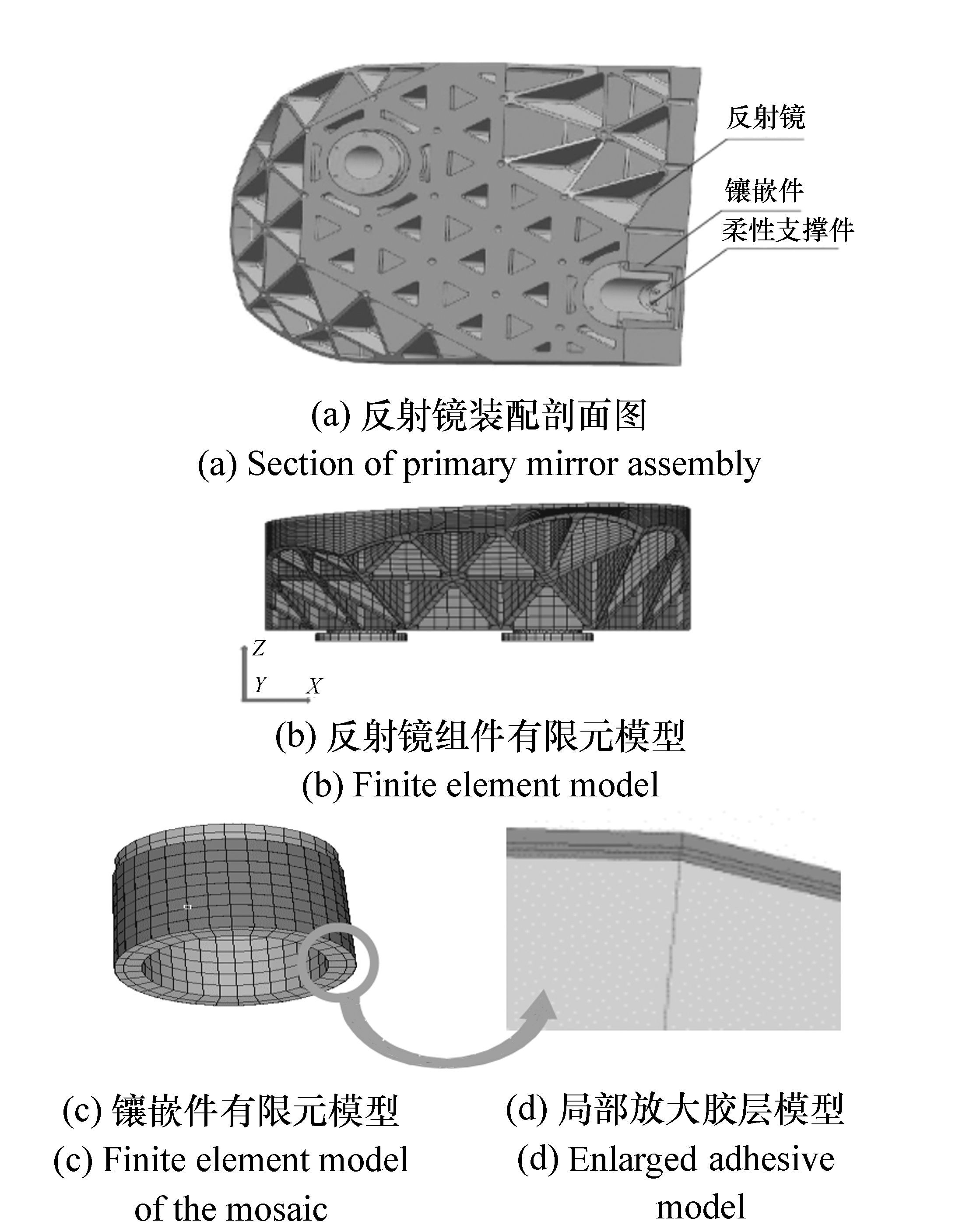
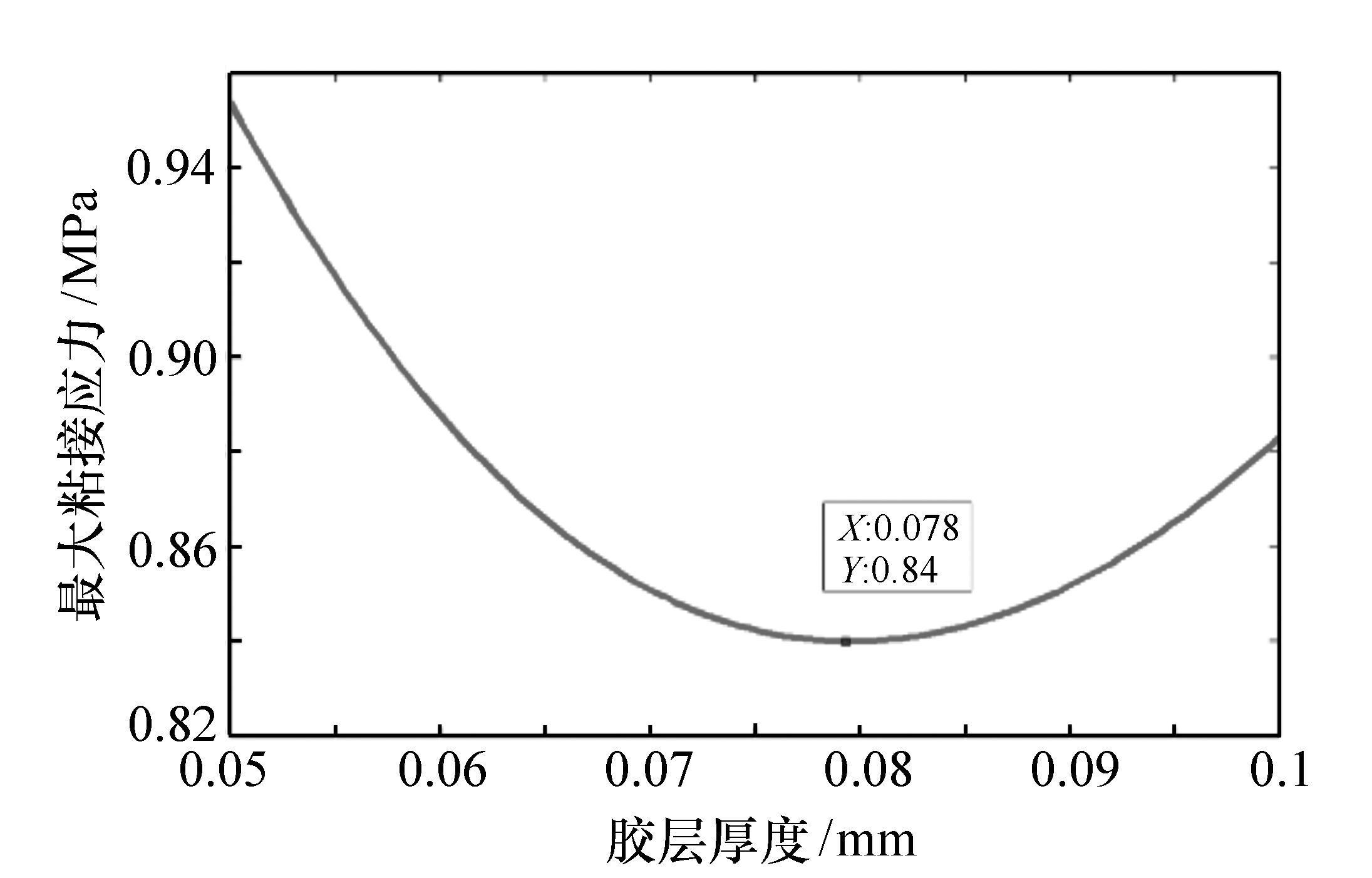
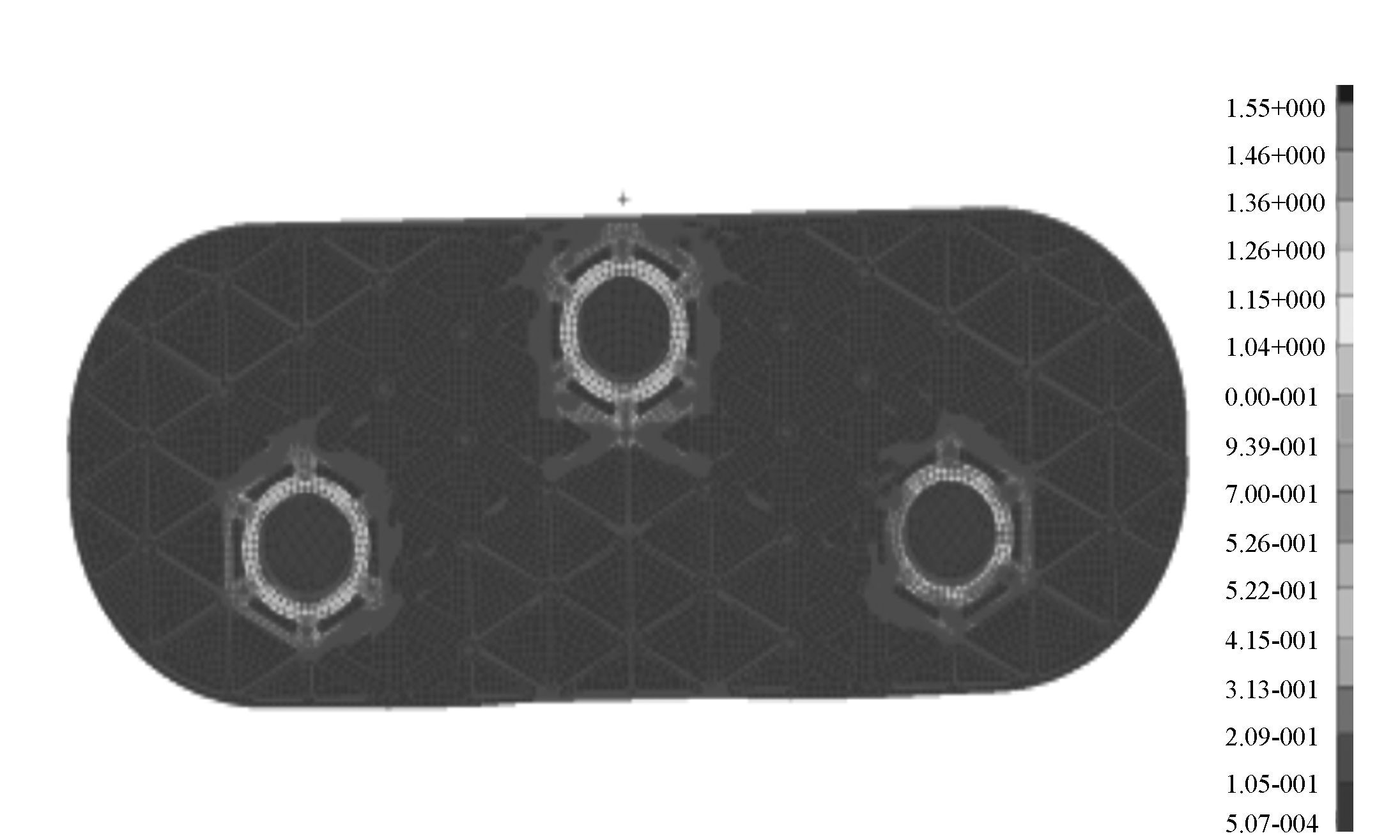
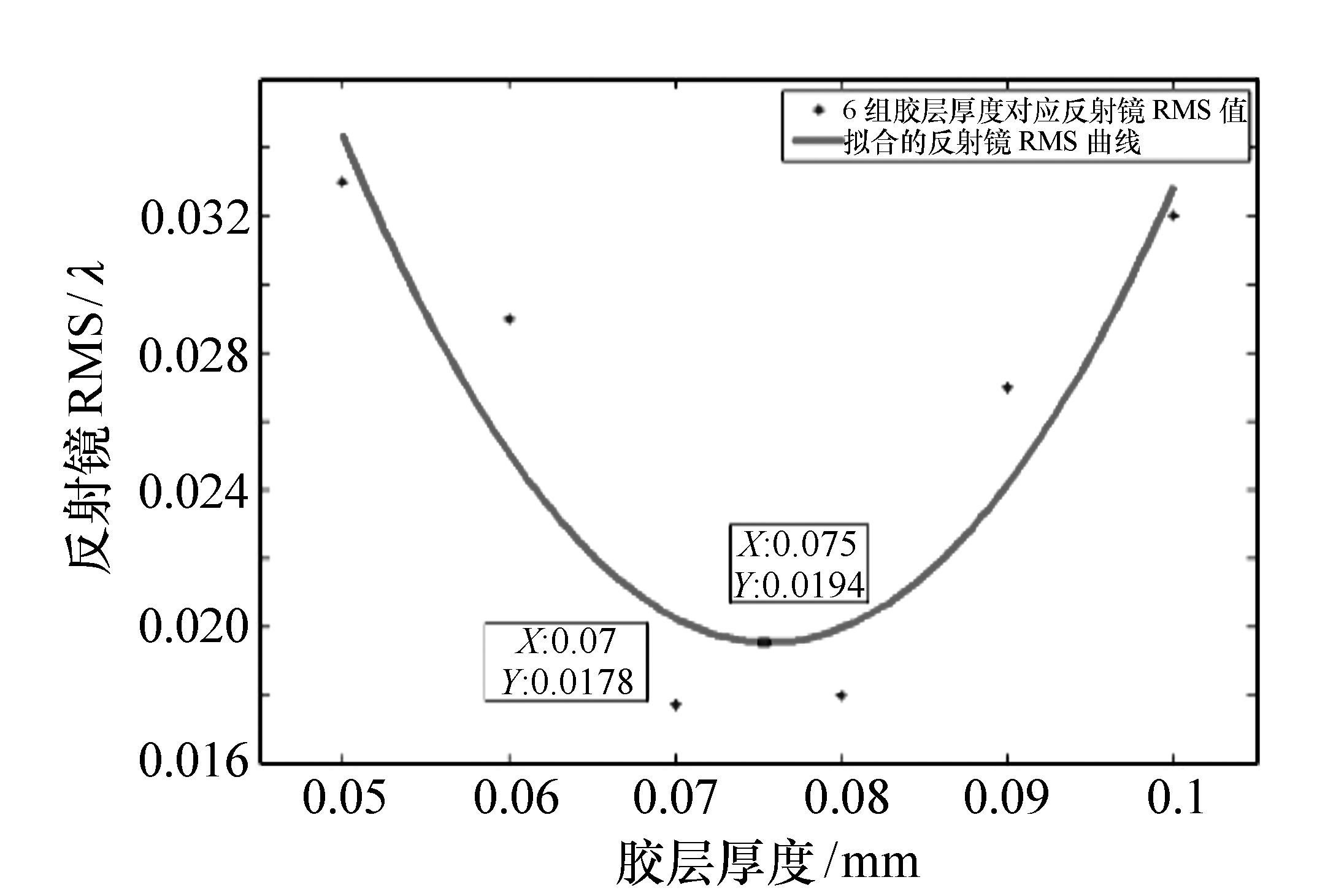
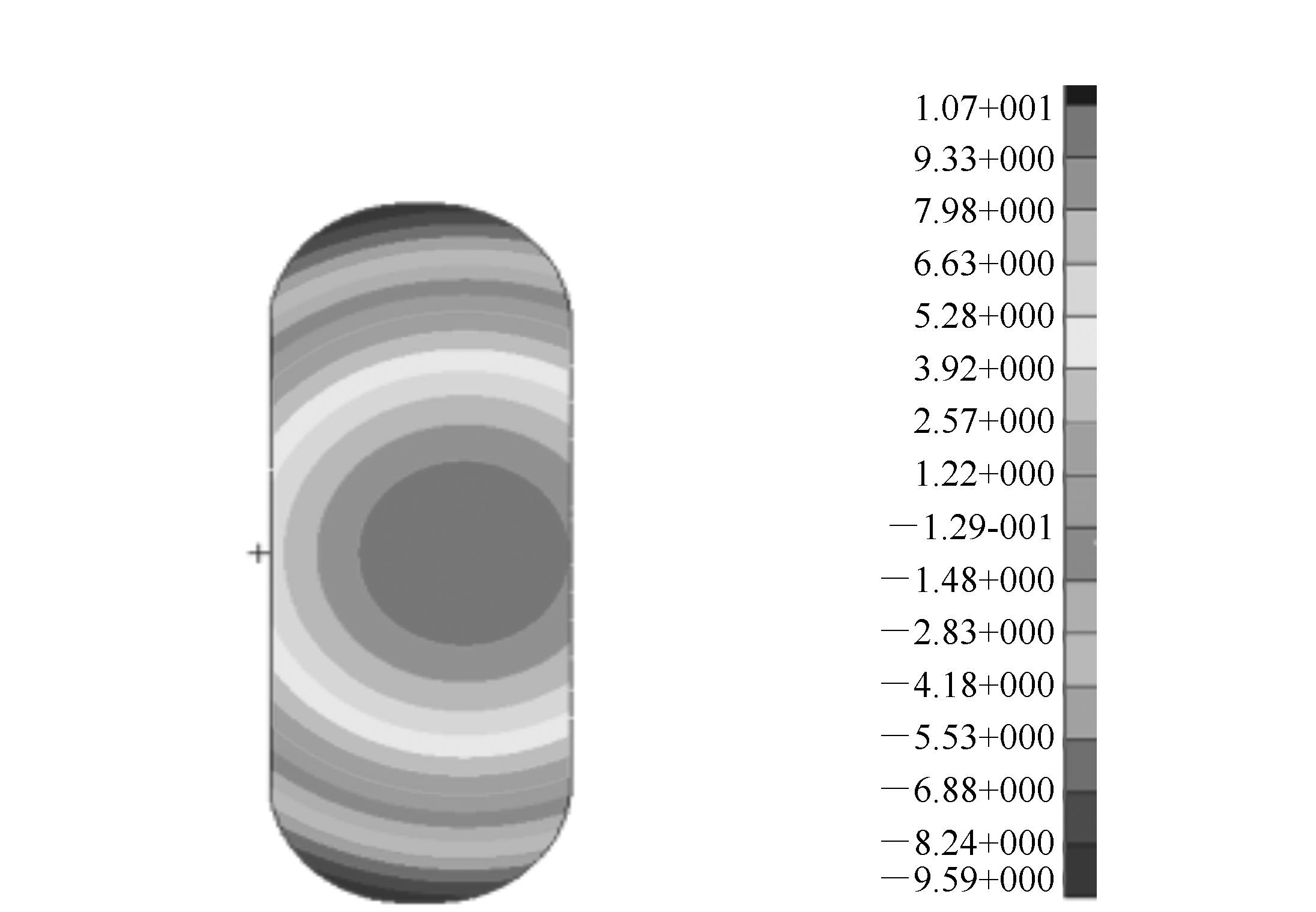
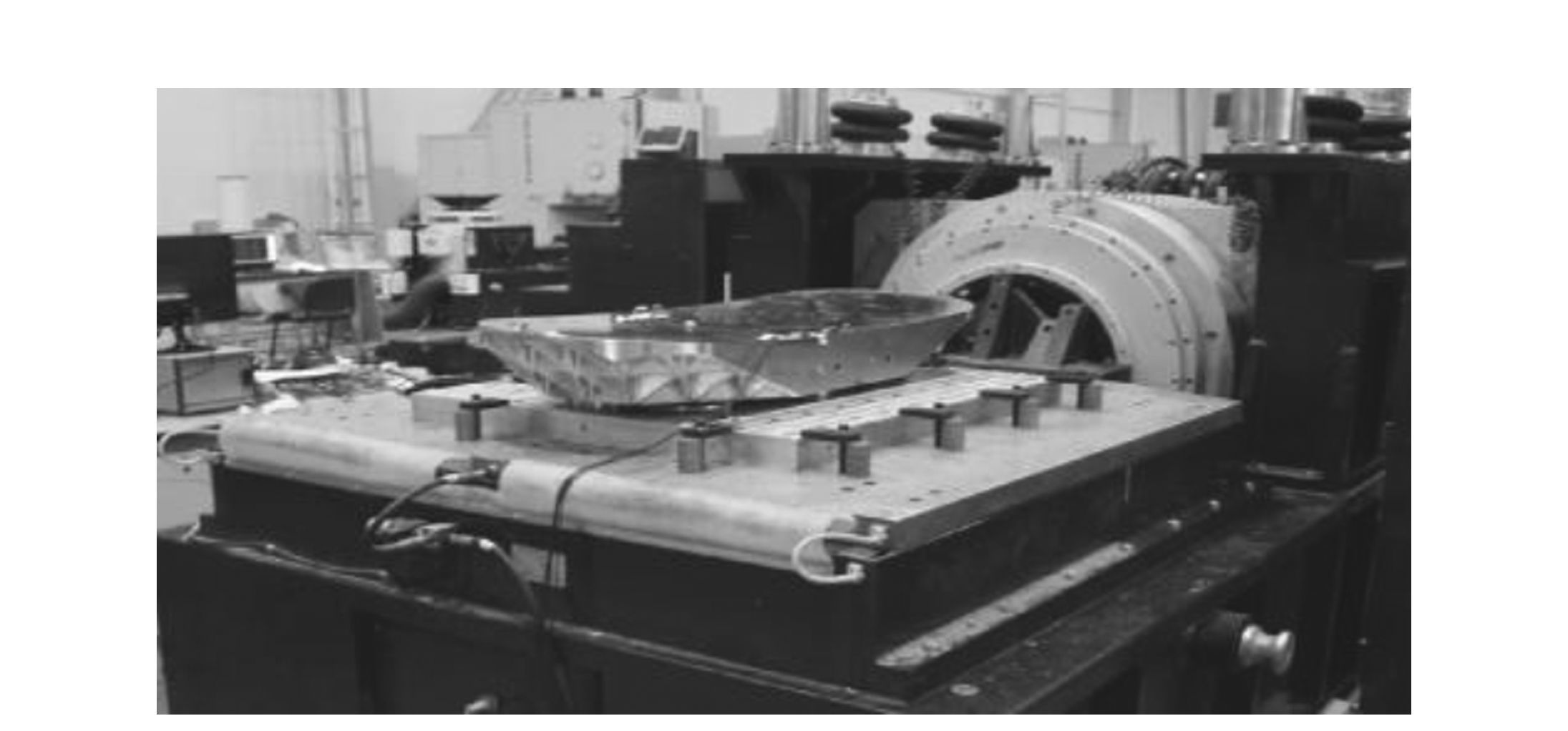
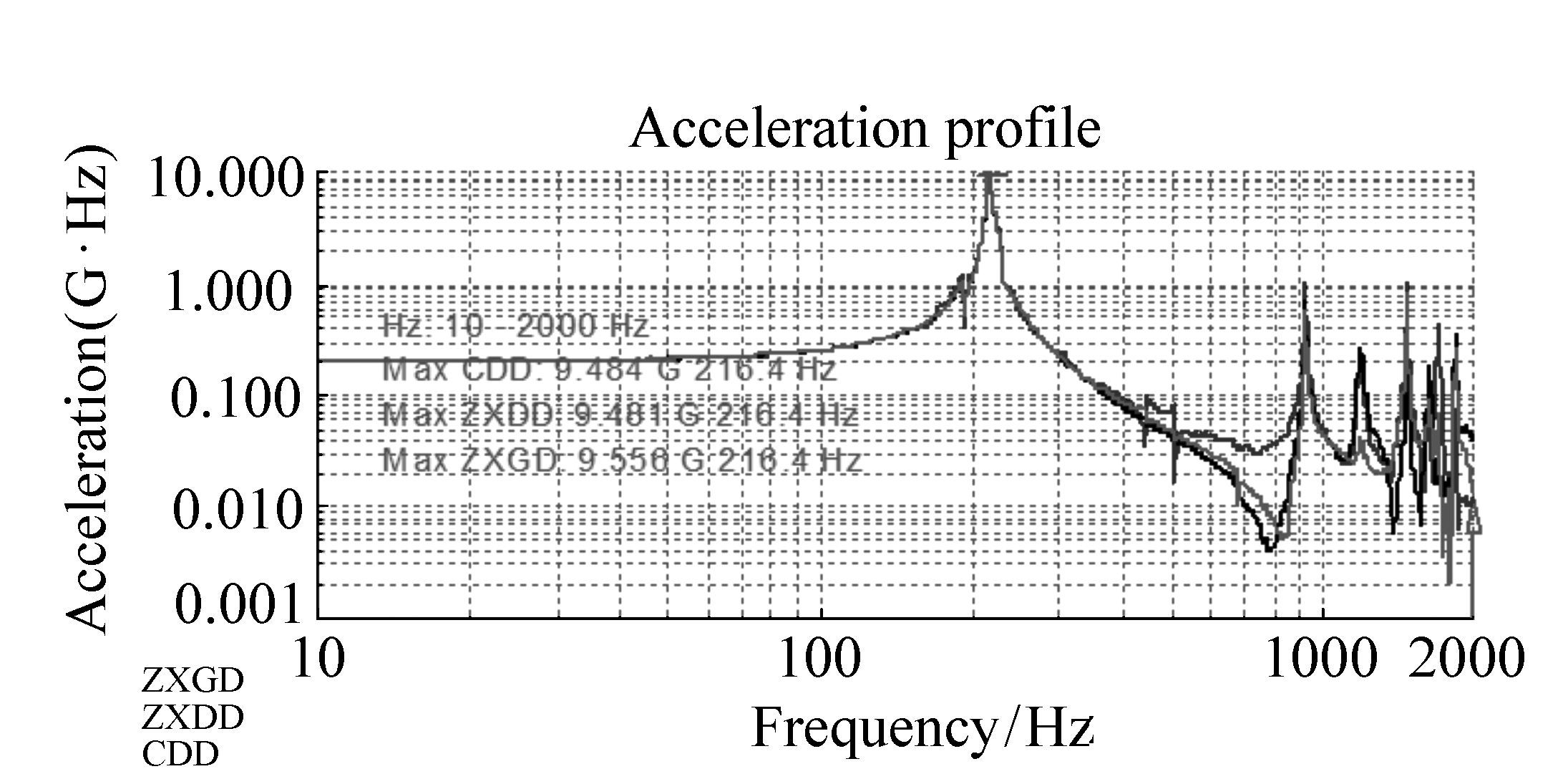
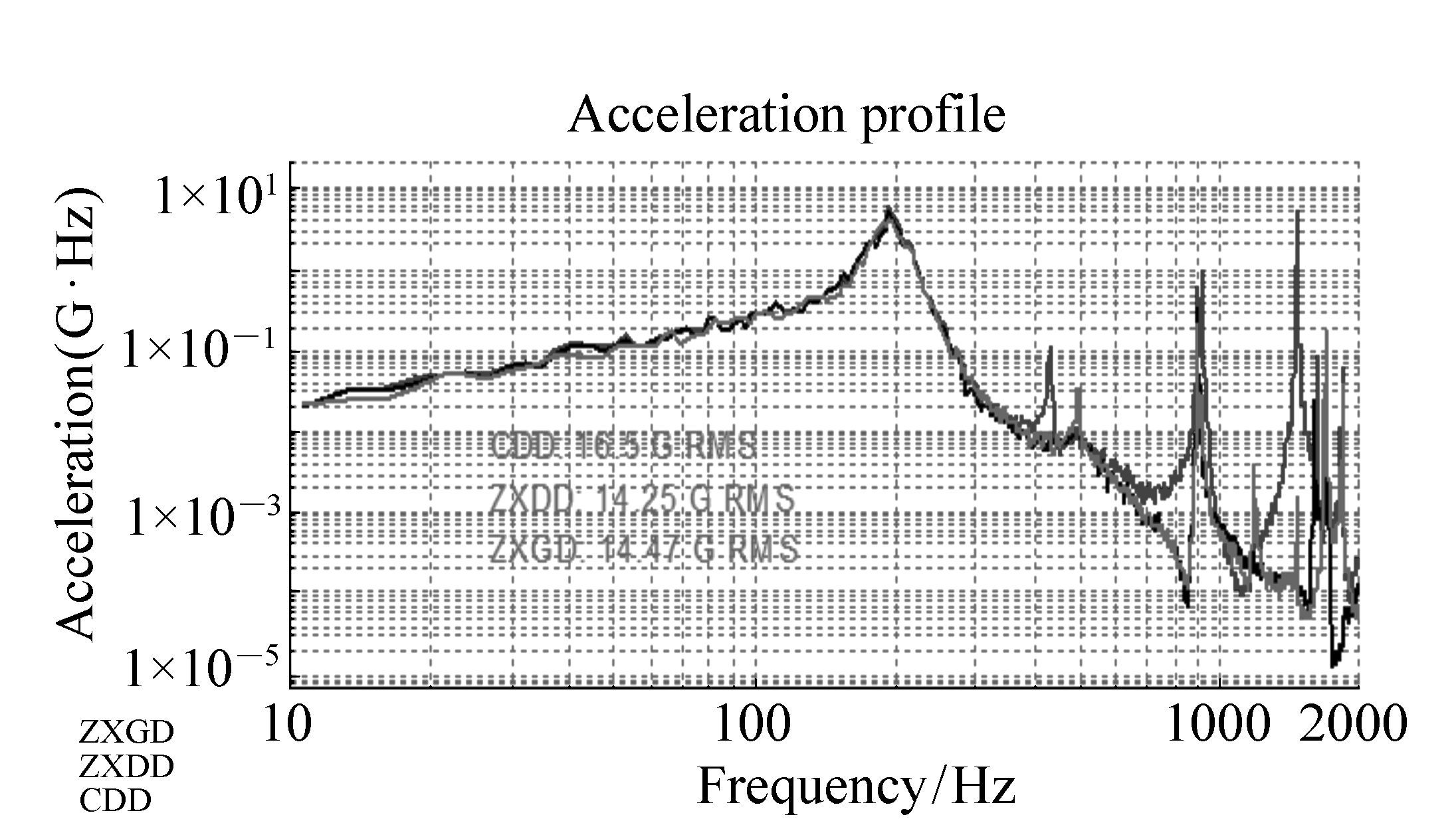
为了实现尺寸为1 200 mm×484 mm的大长宽比长条形空间反射镜的无热装配,减小反射镜面形精度受热应力的影响,本文对环氧胶(GHJ-01(Z))胶层厚度对反射镜面形的影响及胶层在静、动力学载荷下的应力进行了研究。首先,介绍了现有的几种基于胡克定律推导的无热粘结厚度方程及其假设条件,并推导了带有锥度的背部盲孔反射镜无热粘结胶层厚度的方程,得出无热粘结胶层厚度曲线;然后,建立了6种不同胶层厚度的反射镜组件模型并进行了分析与比较。通过分析,在+5℃温升工况下,反射镜胶层厚度为0.07 mm时具有最好的面形精度,其RMS值0.0178λ,其检测方向在自重作用下的面形精度RMS值为0.0173λ,一阶频率为220.17 Hz;最后对胶层无热化设计后的反射镜组件进行了振动试验和粘结剂剪切强度试验,分析与试验表明:反射镜组件一阶频率为216.4 Hz,与有限元分析结果相对误差为1.71%;满足动静态刚度要求;同时,在动力学载荷下该厚度胶层的应力均小于其固化后的抗剪强度,安全裕度为2.46;各项指标满足设计要求。
为了实现尺寸为1 200 mm×484 mm的大长宽比长条形空间反射镜的无热装配,减小反射镜面形精度受热应力的影响,本文对环氧胶(GHJ-01(Z))胶层厚度对反射镜面形的影响及胶层在静、动力学载荷下的应力进行了研究。首先,介绍了现有的几种基于胡克定律推导的无热粘结厚度方程及其假设条件,并推导了带有锥度的背部盲孔反射镜无热粘结胶层厚度的方程,得出无热粘结胶层厚度曲线;然后,建立了6种不同胶层厚度的反射镜组件模型并进行了分析与比较。通过分析,在+5℃温升工况下,反射镜胶层厚度为0.07 mm时具有最好的面形精度,其RMS值0.0178λ,其检测方向在自重作用下的面形精度RMS值为0.0173λ,一阶频率为220.17 Hz;最后对胶层无热化设计后的反射镜组件进行了振动试验和粘结剂剪切强度试验,分析与试验表明:反射镜组件一阶频率为216.4 Hz,与有限元分析结果相对误差为1.71%;满足动静态刚度要求;同时,在动力学载荷下该厚度胶层的应力均小于其固化后的抗剪强度,安全裕度为2.46;各项指标满足设计要求。

2016, 9(6): 713-720.
doi: 10.3788/CO.20160906.0713
摘要:
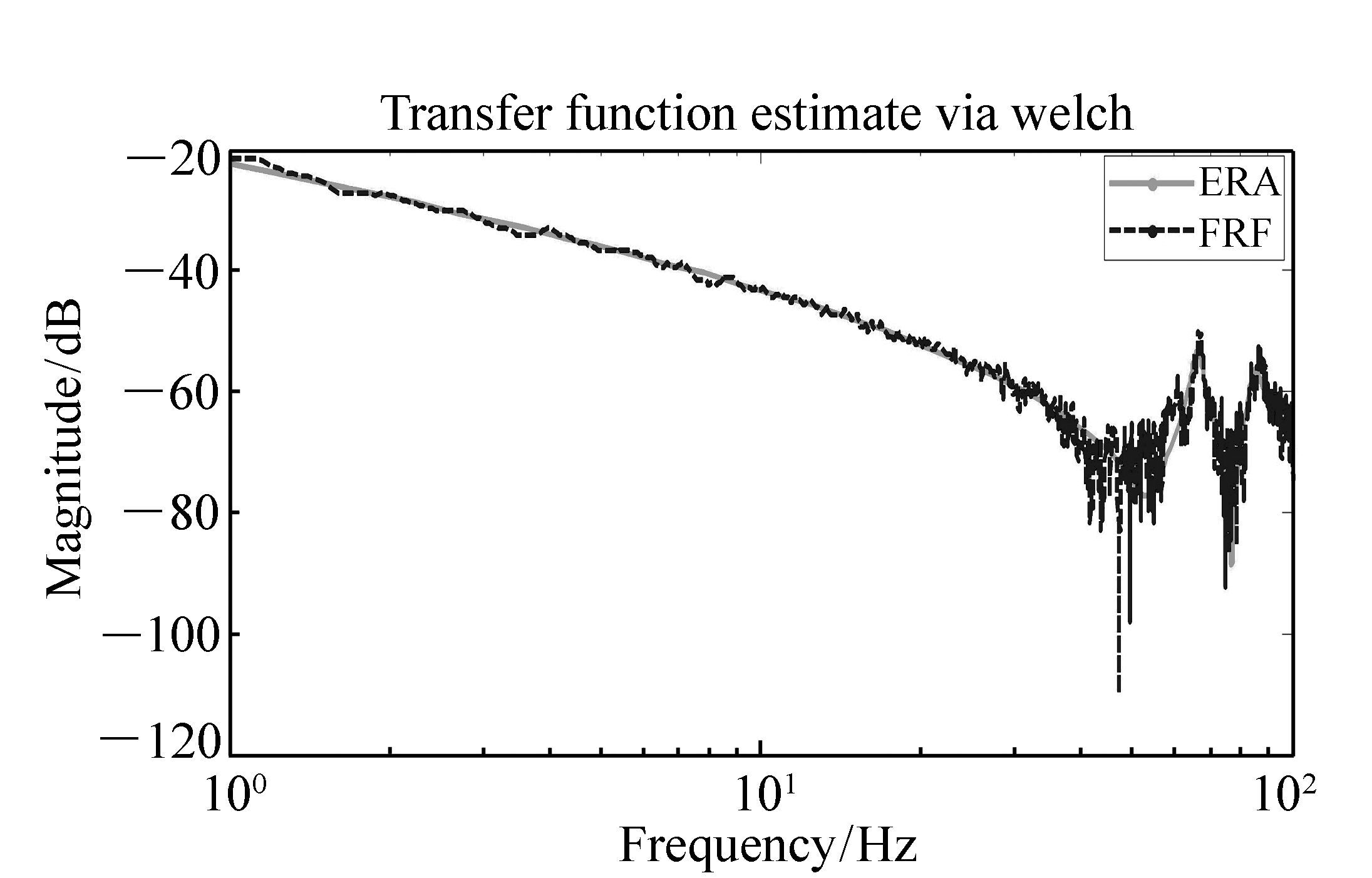
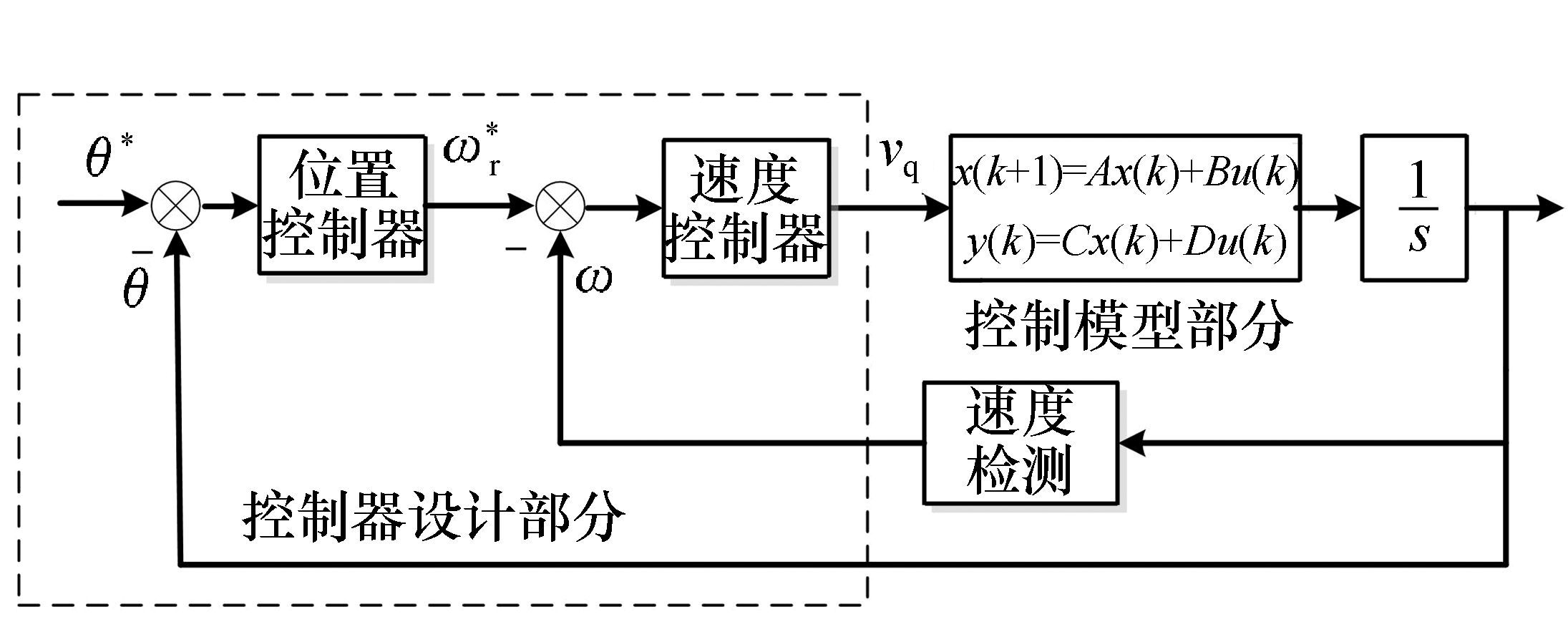
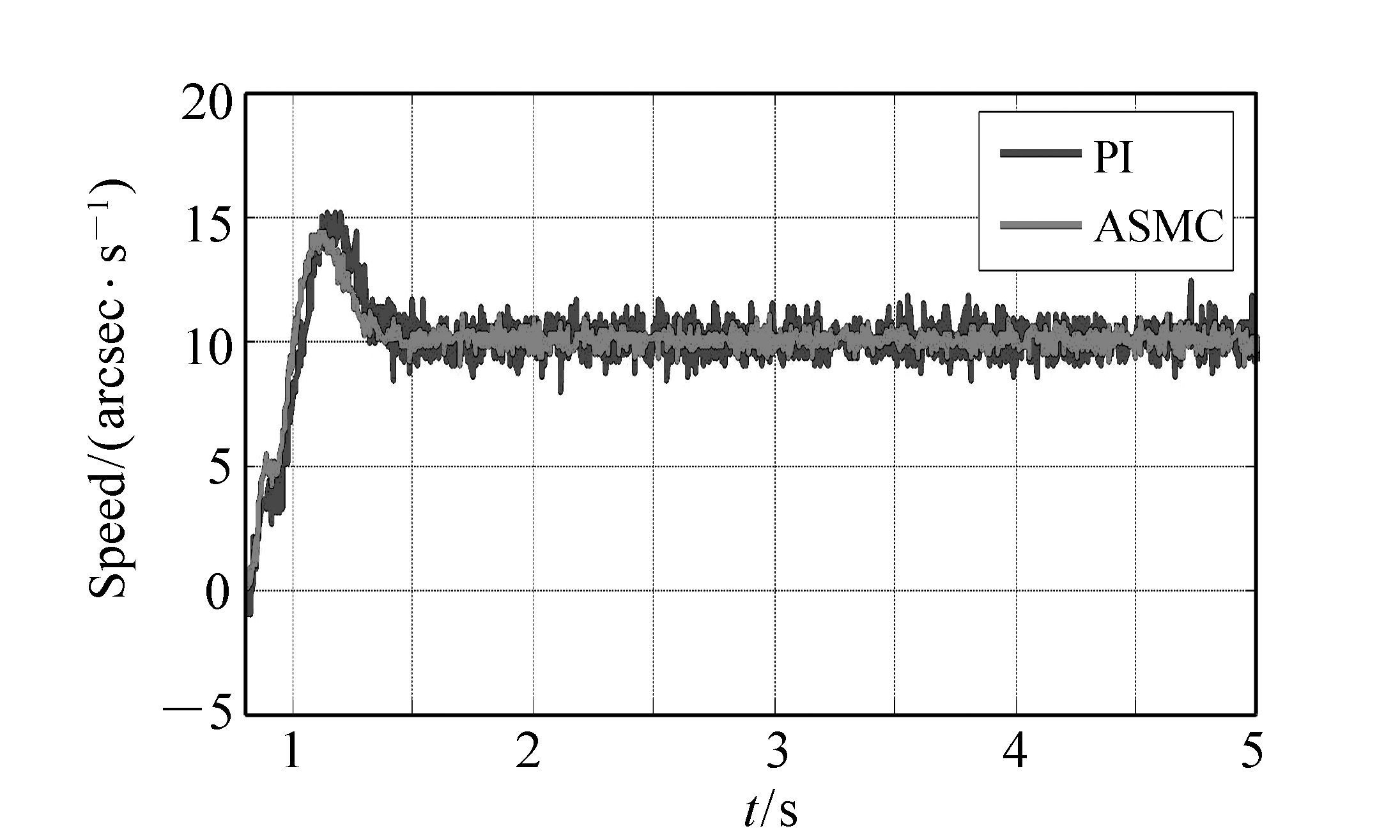
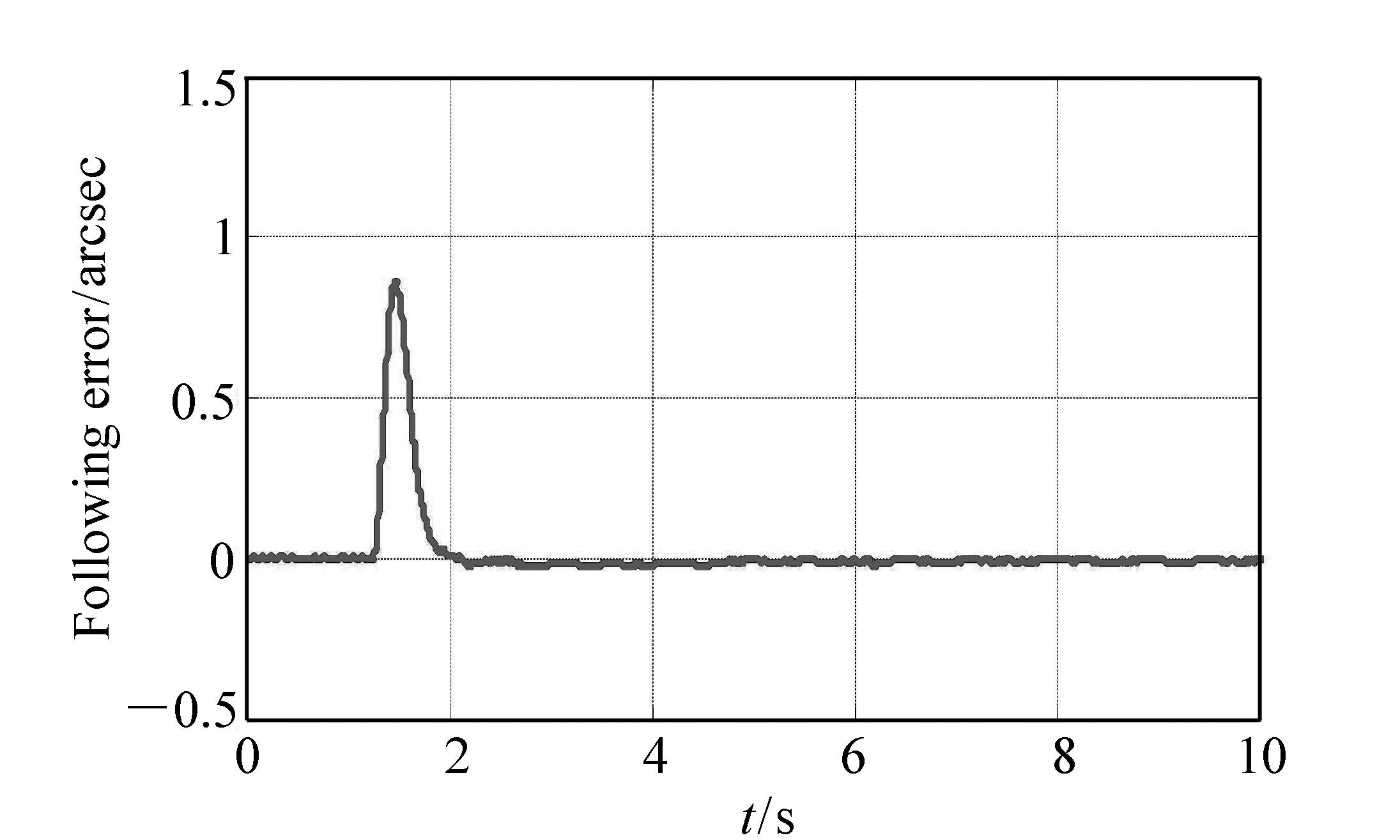
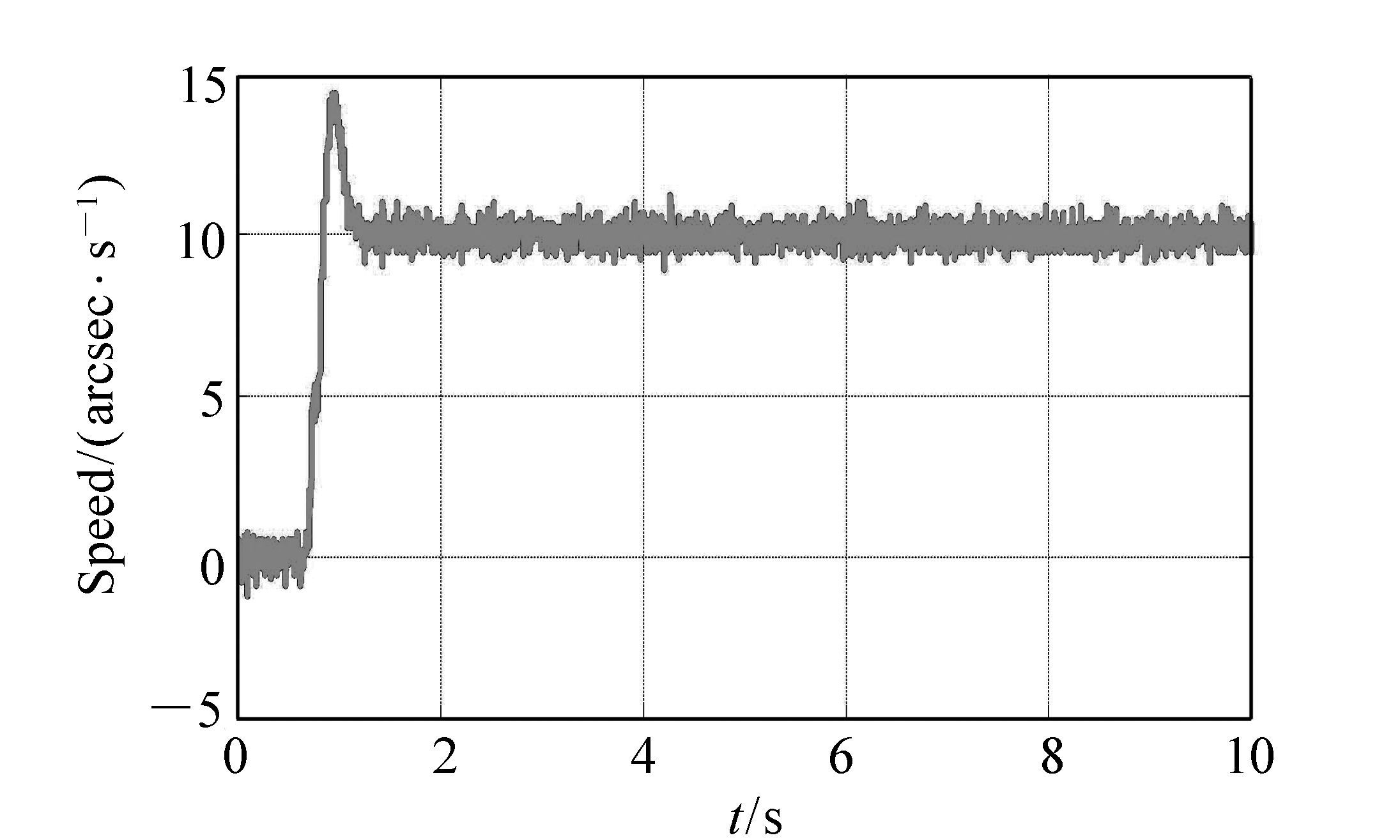
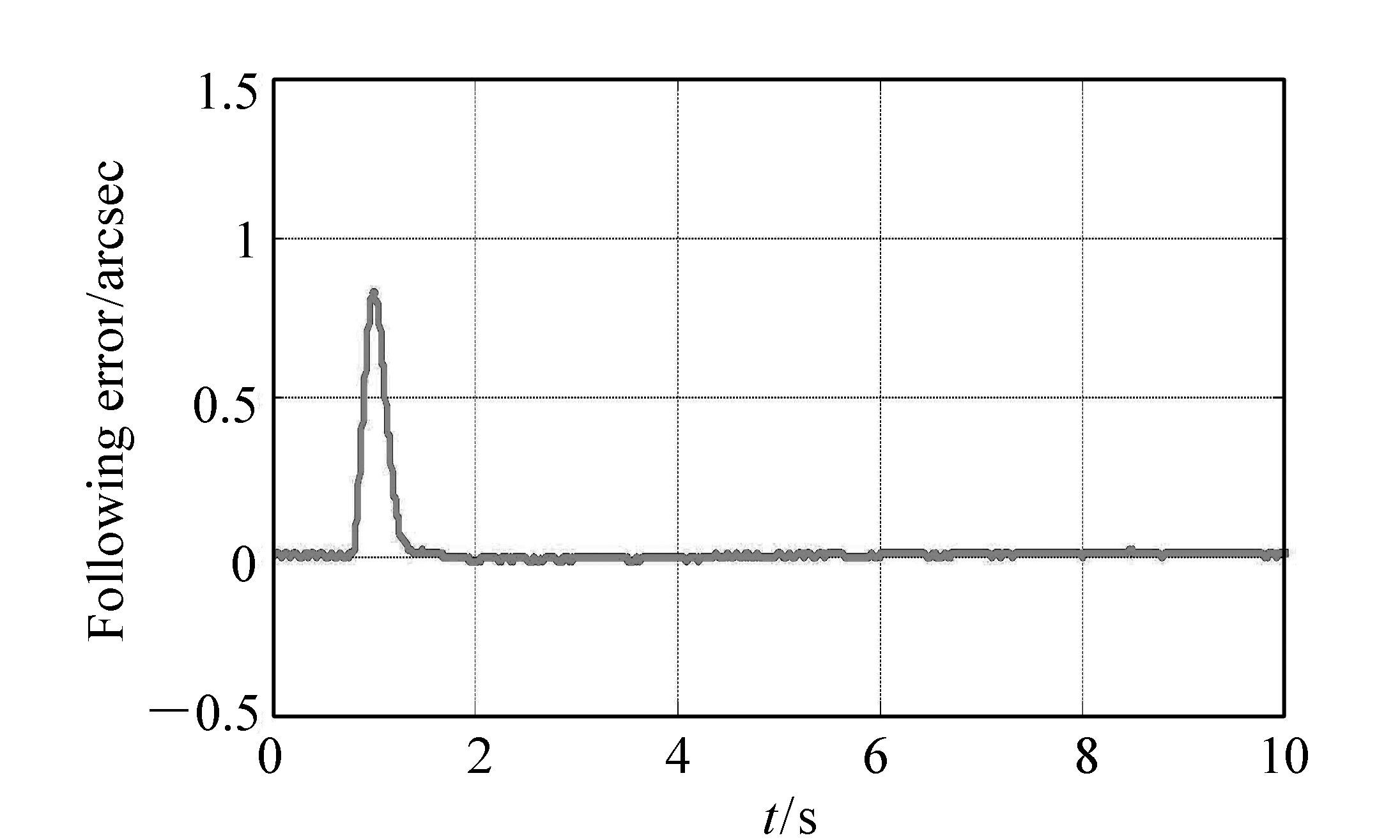
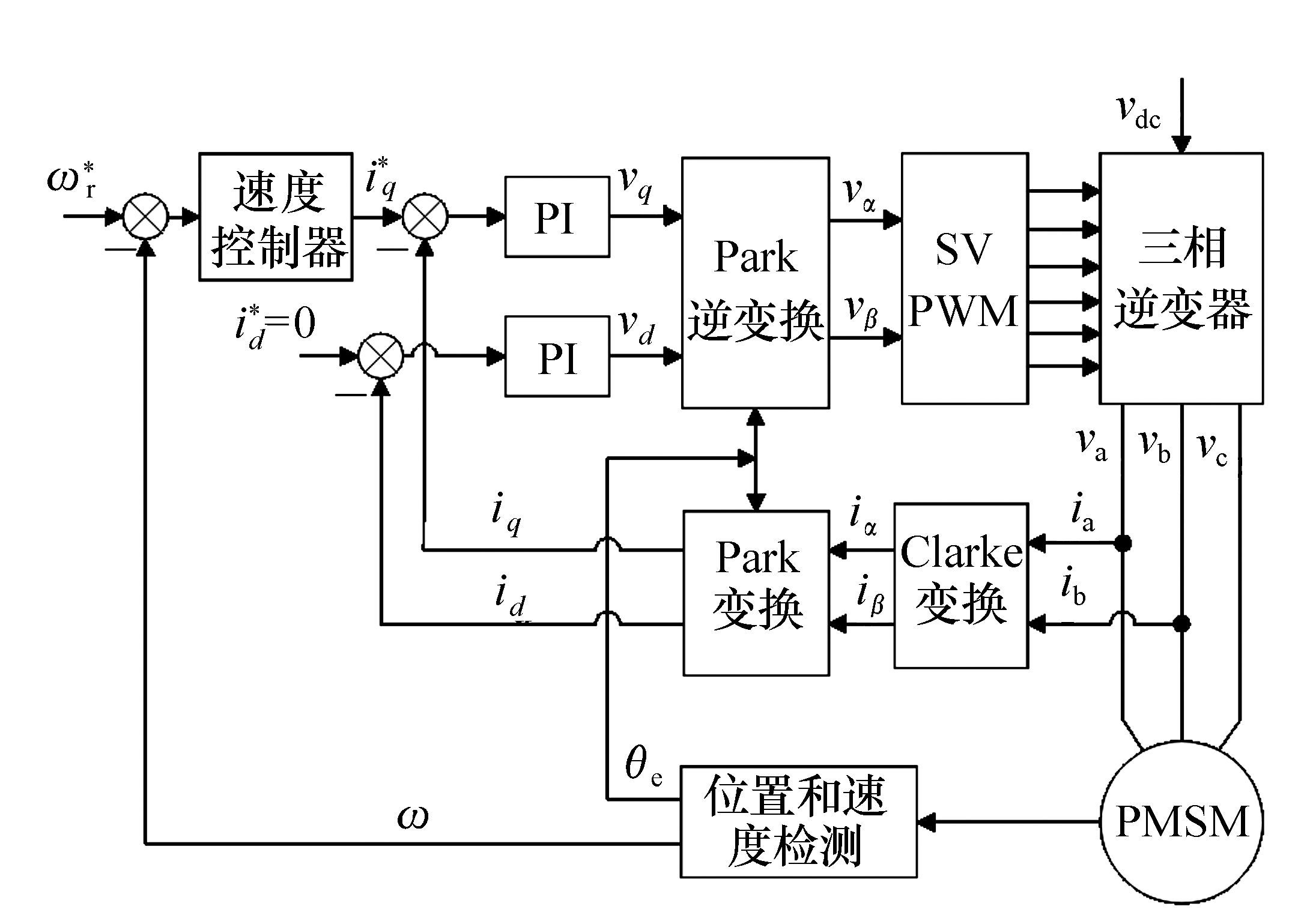
为了提高永磁同步电机驱动的大型望远镜转台的低速跟踪性能,设计了自适应滑模控制器以实时抑制系统的参数不确定性和外部扰动对系统的影响。为了优化控制器参数和缩短控制系统的调试周期,辨识出了转台控制系统的控制模型,同时建立了系统内部的非线性因素模型,综合上述模型对系统进行了集成仿真。仿真和实验结果证明了所设计的自适应滑模控制器对系统参数不确定性、外部扰动和噪声具有较好的鲁棒性,对望远镜转台的低速控制效果良好。
为了提高永磁同步电机驱动的大型望远镜转台的低速跟踪性能,设计了自适应滑模控制器以实时抑制系统的参数不确定性和外部扰动对系统的影响。为了优化控制器参数和缩短控制系统的调试周期,辨识出了转台控制系统的控制模型,同时建立了系统内部的非线性因素模型,综合上述模型对系统进行了集成仿真。仿真和实验结果证明了所设计的自适应滑模控制器对系统参数不确定性、外部扰动和噪声具有较好的鲁棒性,对望远镜转台的低速控制效果良好。