


Analysis of beam steering control precision for Risley prisms based on forward solution
-
摘要: 为了获得Risley棱镜系统光束指向控制精度指标设计及性能提升的依据,对系统光束指向控制精度随轴系角度测量精度的非线性变化规律进行了研究。首先,以一级近轴近似矢量合成模型为基础,采用正解方法根据双棱镜方位推导了出射光束指向的解析表达式;然后,结合单自由度轴系伺服控制经验,通过泰勒级数展开的方式推导出了光束指向控制精度与轴系角度测量精度之间的非线性解析表达式,并由此获得了界定限判据;最后,分别对小偏向角系统和大偏向角系统进行了仿真分析,获得了光束指向控制精度在全视场区域内的变化情况。结果表明,本文研究所得的非线性解析式描述了影响系统光束指向控制精度诸多因素之间的相互关系,能够为Risley棱镜光束指向系统的设计及整体性能的优化提供依据。Abstract: In order to obtain the basis for index design of beam steering control precision and performance improvement for Risley prism system, the nonlinear relationship between Risley prism beam steering control precision and shaft angle measurement precision is investigated. First, based on the first-order paraxial approximation vector synthesis model, the analytical expression of the direction of the outgoing beam is derived from the double prisms position by the forward solution method. And then, based on the servocontrol experience of single degree of freedom shaft, the nonlinear analytical expression between the beam steering control precision and the shaft angle measurement precision is deduced by the Taylor series expansion method, and thus the dividing line criterion is obtained. Finally, the small deflection angle system and the large deflection angle system are simulated and analyzed respectively, and the change of the beam steering control precision over the whole field of view is obtained. Results show that the nonlinear analytical expression derived in this paper represents the relationship among the factors that affect the control precision of the system, which provides the basis for the design and optimization of the Risley prism beam steering system.
-
Key words:
- beam steering /
- Risley prism /
- control precision /
- forward solution /
- dividing line
-

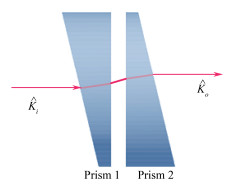
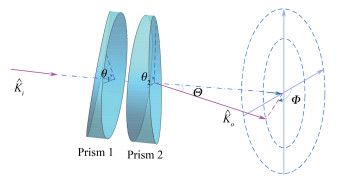
图 1 Risley棱镜光束偏转三维示意图
Figure 1. 3D schematic diagram of beam steering for Risley prisms

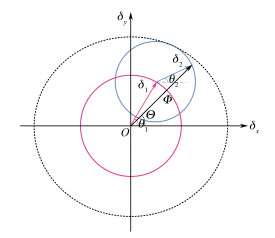
图 2 Risley棱镜光束偏转平面矢量投影示意图
Figure 2. 2D schematic diagram of beam steering for Risley prisms

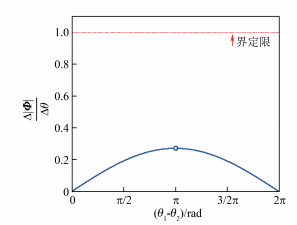
图 4 小偏向角系统

Figure 4. Curve of


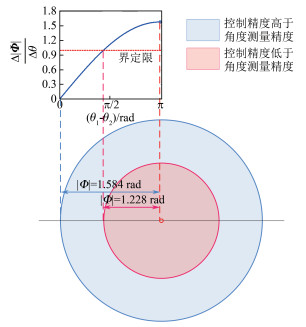
图 5 大偏向角系统

Figure 5. Curve of

-
[1] MARSHALL G F, STUTZ G E. Handbook of Optical and Laser Scanning[M]. Boca Raton:CRC Press, 2011. [2] SCHWARZE C R, VAILLANCOURT R, CARLSON D, et al.. Risley-prism based compact laser beam steering for IRCM, laser communications, and laser radar[EB/OL].[2016-11-16]. http://www.optra.com/images/TP-Compact-Beam-Steering.pdf [3] SCHUNDLER E, CARLSON D, VAILLANCOURT R, et al.. Compact, wide field DRS explosive detector[C]. Chemical, Biological, Radiological, Nuclear, and Explosives (CBRNE) Sensing XⅡ, IEEE, Orlando, USA, April 25, 2011:80181O. [4] DIXON J, ENGEL J R, SCHWARZE C. Risley prism universal pointing system (RPUPS)[J]. SPIE, 2015, 9579:95790B. https://www.researchgate.net/publication/300348675_Risley_prism_universal_pointing_system_RPUPS [5] SCHWARZE C. A new look at Risley prisms[J]. Photonics Spectra, 2006, 40(6):67-70. [6] 范大鹏, 周远, 鲁亚飞, 等.旋转双棱镜光束指向控制技术综述[J].中国光学, 2013, 6(2):136-150. http://www.chineseoptics.net.cn/CN/abstract/abstract8956.shtmlFAN D P, ZHOU Y, LU Y F, et al.. Overview of beam steering technology based on rotational double prisms[J].Chinese Optics, 2013, 6(2):136-150. (in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract8956.shtml [7] 洪华杰, 周远, 陶忠, 等. Risley棱镜在光学侦察中的应用[J].应用光学, 2014, 35(2):179-187. http://www.cnki.com.cn/Article/CJFDTOTAL-YYGX201402003.htmHONG H J, ZHOU Y, TAO ZH, et al.. Application of risley prism on optical reconnaissance[J]. Journal of Applied Optics, 2014, 35(2):179-187. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-YYGX201402003.htm [8] JEON Y G. Generalization of the first-order formula for analysis of scan patterns of Risley prisms[J]. Optical Eng., 2011, 50(11):113002. doi: 10.1117/1.3655501 [9] 周远, 鲁亚飞, 黑沫, 等.旋转双棱镜光束指向解析解[J].光学精密工程, 2013, 21(6):1373-1379. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201307008.htmZHOU Y, LU Y F, HEI M, et al.. Analytic solution of optical beam steering based on rotational double prisms[J]. Opt. Precision Eng., 2013, 21(6):1373-1379. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201307008.htm [10] 周远, 鲁亚飞, 黑沫, 等.旋转双棱镜光束指向的反向解析解[J].光学精密工程, 2013, 21(7):1693-1700. http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201307008.htmZHOU Y, LUY F, HEI M, et al.. Analytical inverse solutions for rotational double prism beam steering[J]. Opt. Precision Eng., 2013, 21(7):1693-1700. (in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXJM201307008.htm [11] LI Y. Third-order theory of the Risley-prism-based beam steering system[J]. Appl. Opt., 2011, 50(5):679-686. doi: 10.1364/AO.50.000679 [12] LI J. High precision pointing system based on Risley prism:analysis and simulation[J]. SPIE, 2015, 9255:92551I http://proceedings.spiedigitallibrary.org/pdfaccess.ashx?url=/data/conferences/spiep/82185/92551i.pdf [13] LI A, SUN W, YI W. An overview of inverse solution expressions for Risley-prism-based scanner[J]. SPIE, 2016, 9947:99470Z. http://adsabs.harvard.edu/abs/2016SPIE.9947E..0ZL [14] LI A H, LIU X SH, SUN W S. Forward and inverse solutions for three-element Risley prism beam scanners[J]. Opt. Express, 2017, 25(7):7677-7688. doi: 10.1364/OE.25.007677 [15] GERALD F, MARSHALL. Risley prism scan patterns[J]. SPIE, 1999, 3787:74-86. https://www.researchgate.net/publication/252299035_Risley_prism_scan_patterns [16] SCHITEA A, DUMA V F. Modeling of Risley prisms devices for exact scan patterns[J]. SPIE, 2013, 8789:878912. http://proceedings.spiedigitallibrary.org/pdfaccess.ashx?url=/data/conferences/spiep/74291/878912.pdf [17] LU Y F, ZHOU Y, HEI M, et al.. Frame frequency prediction for Risley-prism-based imaging laser radar[J]. Appl. Opt., 2014, 53(16):3556-3564. doi: 10.1364/AO.53.003556 [18] SANCHEZ M, GUTOW D. Control laws for a three-element Risley prism optical beam pointer[J]. SPIE, 2006, 6304:630403. http://adsabs.harvard.edu/abs/2006SPIE.6304E..03S [19] GARCIA-TORALES G, FLORES J L, MUNOZ R X. High precision prism scanning system[J]. SPIE, 2007, 6422:64220X. http://proceedings.spiedigitallibrary.org/pdfaccess.ashx?url=/data/conferences/spiep/9904/64220x_1.pdf [20] LU W, LIU L R, SUN J F. Control loop analysis of the complex axis in satellite laser communications[J]. SPIE, 2010, 7814:781410. [21] LI A, ZUO Q, SUN W, et al.. Beam distortion of rotation double prisms with an arbitrary incident angle[J]. Appl. Opt., 2016, 55(19):5164-5171. doi: 10.1364/AO.55.005164 [22] SANGHERA J S. Broadband beam steering using chalcogenide-based Risley prisms[J]. Optical Eng., 2011, 50(50):103-108. https://www.researchgate.net/publication/252998136_Broadband_beam_steering_using_chalcogenide-based_Risley_prisms [23] WEBER D C, TROLINGER J D, NICHOLS R G, et al.. Diffractively corrected Risley prism for infrared imaging[J]. SPIE, 2000, 4025:79-86. https://www.researchgate.net/publication/252457063_Diffractively_corrected_Risley_prism_for_infrared_imaging [24] ZHAO Y, YUAN Y. First-order approximation error analysis of Risley-prism-based beam directing system[J]. Appl. Opt., 2014, 53(34):8020-8031. doi: 10.1364/AO.53.008020 [25] ZHANG H, YUAN Y, SU L, et al.. Beam steering uncertainty analysis for Risley prisms based on Monte Carlo simulation[J]. Opt. Eng., 2017, 56(1):014105. doi: 10.1117/1.OE.56.1.014105 -

 下载:
下载:


图(6)
计量
- 文章访问数: 2662
- HTML全文浏览量: 1265
- PDF下载量: 739
- 被引次数: 0
