


Three-step coherent diffraction imaging system based on parallel plates
doi: 10.3788/CO.20181106.1032
-
摘要: 传统单光束多强度重建(SBMIR)系统中,多次平移图像传感器所积累的误差导致光电成像系统的成像效果及有效分辨率降低,为了解决这一问题。本文提出基于平行平晶的三步相干衍射成像系统,采取插入或抽取2块平行平晶的方法获取3个不同的衍射面,实现了对复振幅型物体的成像及恢复重建。数值模拟及实验表明,系统有效克服了SBMIR系统中数次平移的误差积累问题,且仅需记录3个衍射面,避免过采样。而且光学系统实现简便、可重复性高。Abstract: In a traditional single beam multiple-intensity reconstruction(SBMIR) system, error is accumulated by multiple translational image sensors, which reduces the imaging effect and the effective resolution of the photoelectric imaging system. In this paper, a three-step coherent diffraction imaging system based on parallel plates is proposed. Three different diffraction planes are obtained by inserting or extracting two parallel plates and imaging and restoration reconstruction of complex amplitude objects are achieved. The numerical simulation and experiments show that the system overcomes the error accumulation problem of several translations in the SBMIR system, and one only needs to record three diffraction surfaces to avoid oversampling. The proposed optical system is easy to implement and has high repeatability.
-

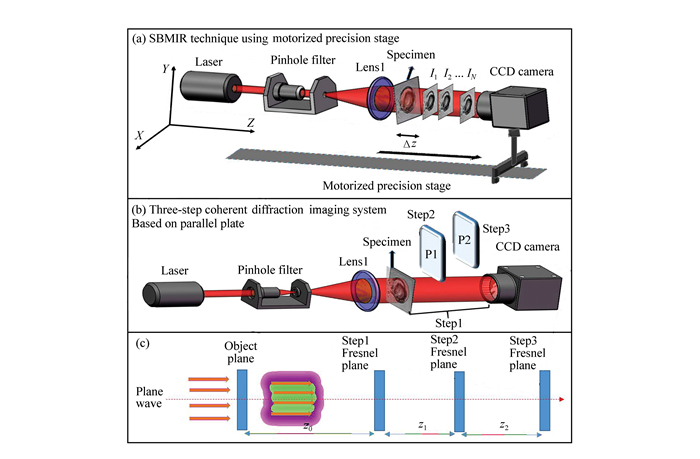
图 1 系统结构比较及原理分析
Figure 1. Structural comparison and principle analysis of proposed system

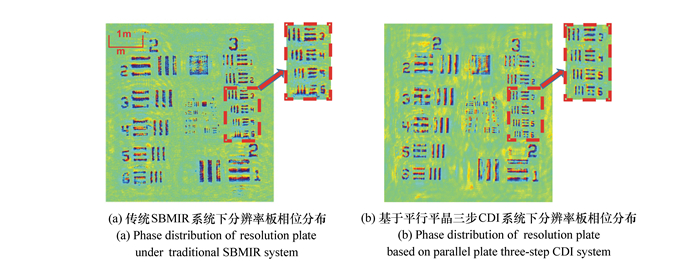
图 4 恢复重建后相位分布比较
Figure 4. Comparison of phase distribution after restoration and reconstruction
-
[1] WITTE S, TENNER V T, NOOM D W, et al.. Lensless diffractive imaging with ultra-broadband table-top sources:from infrared to extreme-ultraviolet wavelengths[J]. Light Science & Applications, 2014, 3, Doi:10.103811sa.2014.44. [2] FIENUP J R. Phase retrieval algorithms:a personal tour[Invited] [J]. Applied Optics, 2013, 52(1):45-56. doi: 10.1364/AO.52.000045 [3] SMITH J S, ARONSTEIN D L, DEAN B H, et al.. Phase retrieval on broadband and under-sampled images for the JWST testbed telescope[J]. Proc SPIE, 2009, 7436. doi: 10.1117/12.825636 [4] MIAO J, CHARALAMBOUS P, KIRZ J, et al.. Extending the methodology of X-ray crystallography to allow imaging of micrometre-sized non-crystalline specimens[J]. Nature, 1999, 400(6742):342-344. doi: 10.1038/22498 [5] ZHANG F, RODENBURG J M. Phase retrieval based on wave-front relay and modulation[J]. Physical Review B Condensed Matter, 2010, 82(12):2511-2524 http://adsabs.harvard.edu/abs/2010PhRvB..82l1104Z [6] 王卫兵, 王挺峰, 郭劲.自适应光学随机并行梯度下降算法波前整形规律仿真[J].中国光学, 2014, 7(3):411-420. http://www.chineseoptics.net.cn/CN/abstract/abstract9140.shtmlWANG W B, WANG T F, GUO J. Simulation on the law of wave-front shaping with stochastic parallel gradient descent algorithm for adaptive optics[J].Chinese Optics, 2014, 7(3):411-420.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9140.shtml [7] 蔺超, 郑玉权.微型X射线数字成像系统的测试与应用[J].中国光学与应用光学, 2010, 3(6):591-597. doi: 10.3969/j.issn.2095-1531.2010.06.009LIN CH, ZHENG Y Q. Test and application of compact digital X-ray imaging system[J]. Chinese Journal of Optics and Applied Optics, 2010, 3(6):591-597.(in Chinese) doi: 10.3969/j.issn.2095-1531.2010.06.009 [8] WILLIAMS G J, QUINEY H M, DHAL B B, et al.. Fresnel coherent diffractive imaging[J]. Physical Review Letters, 2006, 97(2):025506. doi: 10.1103/PhysRevLett.97.025506 [9] 李俊昌, 彭祖杰, Tankam, 等.散射光彩色数字全息光学系统及波面重建算法研究[J].物理学报, 2010, 59(7):4646-4655. http://d.old.wanfangdata.com.cn/Periodical/wlxb201007038LI J CH, PENG Z J, TAN K P, et al.. An optical system of scattered light digital color holography and its wave front reconstruction algorithm[J]. Acta Physica Sinica, 2010, 59(7):4646-4655.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/wlxb201007038 [10] 吴迎春, 吴学成, 王智化, 等.压缩感知重建数字同轴全息[J].光学学报, 2011, 31(11):76-81. http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201111015.htmWU Y CH, WU X CH, WANG ZH H, et al.. Compressed sensing reconstruction of digital coaxial holography[J]. Acta Optica Sinica, 2011, 31(11):76-81.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-GXXB201111015.htm [11] ZHANG F C, PEDRINI G, OSTEN W. Phase retrieval of arbitrary complex-valued fields through aperture-plane modulation[J]. Physical Review A, 2007, 75(4):043805. doi: 10.1103/PhysRevA.75.043805 [12] GERCHBERG R W, ASW O. A practical algorithm for determination of phase from image and diffraction plane pictures[J]. Optik, 1972, 35:237-250. [13] 刘贝贝, 于瀛洁, 伍小燕, 等.基于光强传输方程的相位恢复条件[J].光学精密工程, 2015, 23(10z):77-84. http://d.old.wanfangdata.com.cn/Conference/8796472LIU B B, YU Y J, WU X Y, et al.. Applicable conditions of phase retrieval based on transport of intensity equation[J]. Opt. Precision Eng., 2015, 23(10z):77-84(in Chinese) http://d.old.wanfangdata.com.cn/Conference/8796472 [14] LAURENT B. Numerical phase retrieval from beam intensity measurements in three planes[J]. SPIE, 2003, 4932:590-598. http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=888071 [15] FALLDORF C, AGOUR M, C V K, et al.. Phase retrieval by means of a spatial light modulator in the Fourier domain of an imaging system[J]. Appl. Opt., 2010, 49(10):1826-1830. doi: 10.1364/AO.49.001826 [16] 徐宁汉, 谭峭峰, 金国藩.利用随机二元纯相位调制重构复杂光场波前[J].中国激光, 2010, 37(7):1800-1806. http://www.cqvip.com/QK/95389X/201007/34594331.htmlXU N H, TAN Q F, JIN G F.Reconstruction of complex wave-Front by random binary phase modulation[J]. Chinese Journal of Lasers, 2010, 37(7):1800-1806.(in Chinese) http://www.cqvip.com/QK/95389X/201007/34594331.html [17] 黄利新, 姚军, 高福华, 等.基于旋转相位调制的复杂光场相位恢复算法[J].中国激光, 2010, 37(12):3066-3069. http://www.cnki.com.cn/Article/CJFDTOTAL-JJZZ201012024.htmHUANG L X, YAO J, GAO F H, et al.. Phase retrieval of complex optical fields based on rotated phase modulation[J]. Chinese Journal of Lasers, 2010, 37(12):3066-3069.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-JJZZ201012024.htm [18] PEDRINI G, OSTENW, ZHANG Y. Wave-front reconstruction from a sequence of interferograms recorded at different planes[J]. Optics Letters, 2005, 30(8):833. doi: 10.1364/OL.30.000833 [19] ALMORO P, PEDRINI G, OSTEN W. Complete wavefront reconstruction using sequential intensity measurements of a volume speckle field[J]. Applied Optics, 2006, 45(34):8596-8605. doi: 10.1364/AO.45.008596 [20] 高昕, 李希宇, 王斌, 等.改进的强度相干成像室内实验方法[J].光学精密工程, 2015, 23(1):83-92. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201501012GAO X, LI X Y, WANG B, et al.. Improved experiment method for intensity correlation imaging in laboratory[J]. Opt. Precision Eng., 2015, 23(1):83-92.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201501012 [21] ZHANG Y, PEDRINI G, OSTEN W, et al.. Whole optical wave field reconstruction from double or multi in-line holograms by phase retrieval algorithm[J]. Optics Express, 2003, 11(24):3234. doi: 10.1364/OE.11.003234 -

 下载:
下载:




图(5)
计量
- 文章访问数: 2293
- HTML全文浏览量: 877
- PDF下载量: 179
- 被引次数: 0
