2018年 11卷 第6期

2018, 11(6): 875-888.
doi: 10.3788/CO.20181106.0875
 摘要
摘要 HTML全文
HTML全文 PDF 4189KB
PDF 4189KB
摘要:
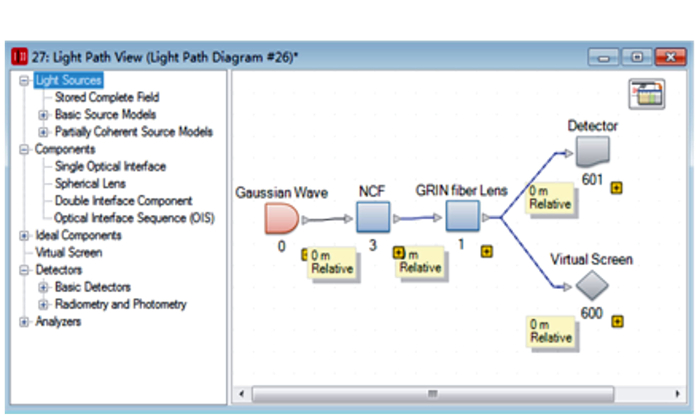
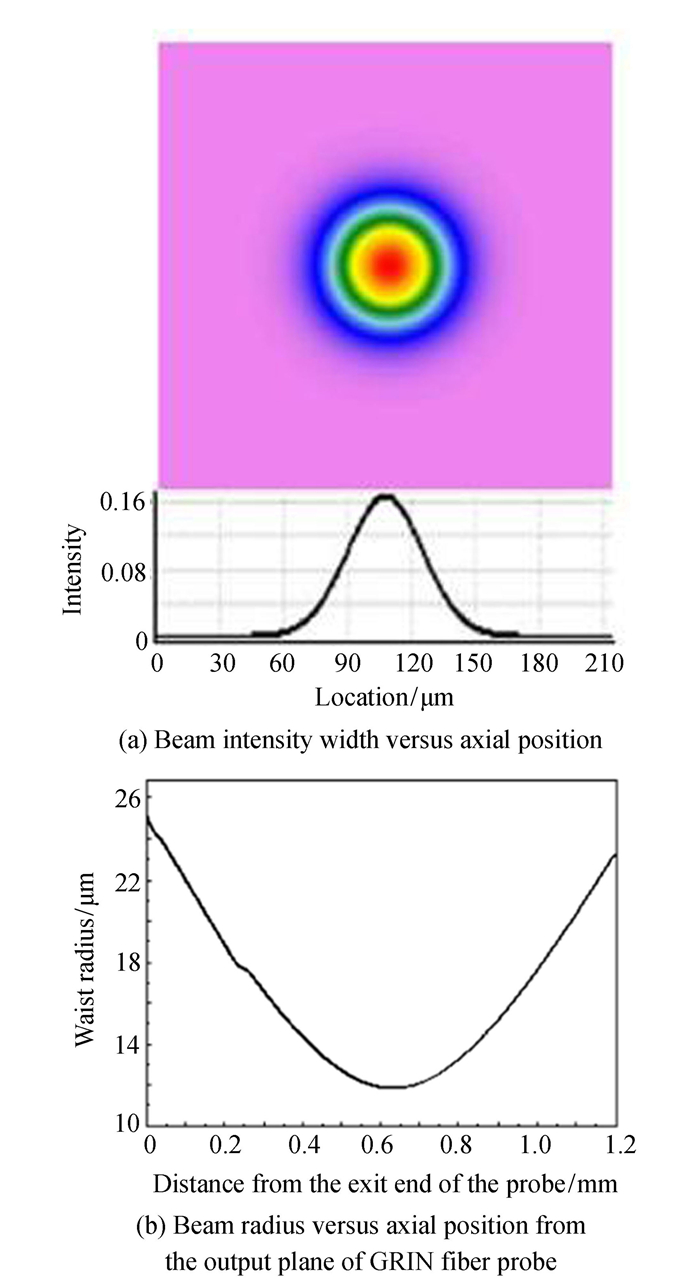
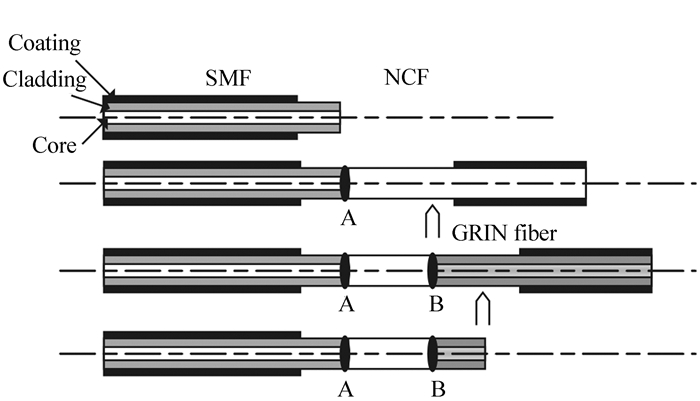
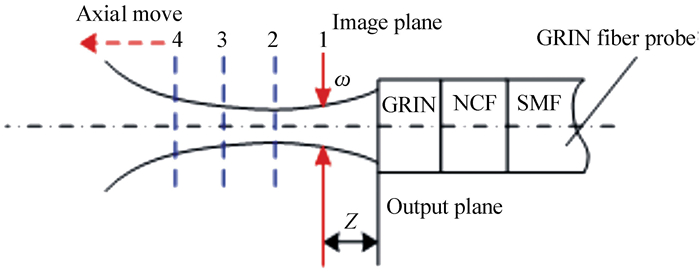
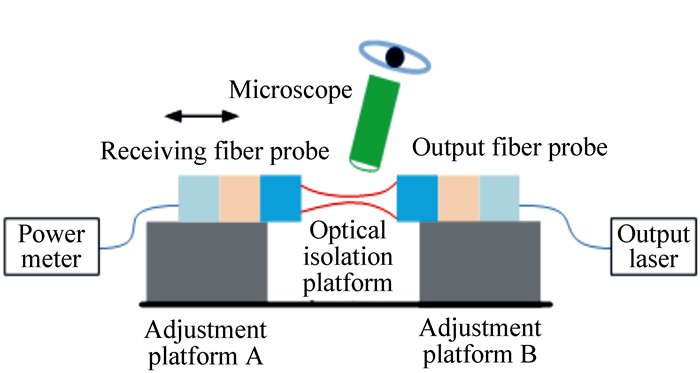
梯度折射率(Gradient-index,GRIN)光纤探头是一种全光纤型超小光学镜头,在心血管等狭小空间组织内窥影像检测中具有广阔的应用前景。但其发展一直缺少系统的理论体系。本文讨论探头设计、制作和性能测试等方面的关键问题。基于GRIN光纤探头聚焦性能的特征参数,对解析设计方法与数值仿真设计方法进行比较分析。针对超小GRIN光纤探头的制作难题,研究一种光纤熔接和切割的高精度一体化集成装置,描述GRIN光纤探头的制作方法。此外,分析了超小GRIN光纤探头聚焦性能检测的方法及装置。本文为超小GRIN光纤探头的设计、制作及性能测试提供了一个方法体系。
梯度折射率(Gradient-index,GRIN)光纤探头是一种全光纤型超小光学镜头,在心血管等狭小空间组织内窥影像检测中具有广阔的应用前景。但其发展一直缺少系统的理论体系。本文讨论探头设计、制作和性能测试等方面的关键问题。基于GRIN光纤探头聚焦性能的特征参数,对解析设计方法与数值仿真设计方法进行比较分析。针对超小GRIN光纤探头的制作难题,研究一种光纤熔接和切割的高精度一体化集成装置,描述GRIN光纤探头的制作方法。此外,分析了超小GRIN光纤探头聚焦性能检测的方法及装置。本文为超小GRIN光纤探头的设计、制作及性能测试提供了一个方法体系。






2018, 11(6): 889-900.
doi: 10.3788/CO.20181106.0889
摘要:
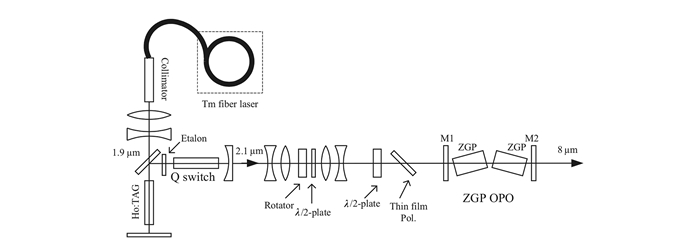
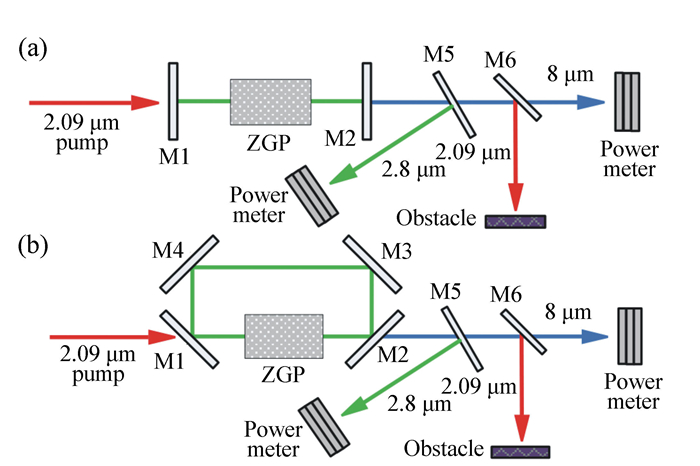
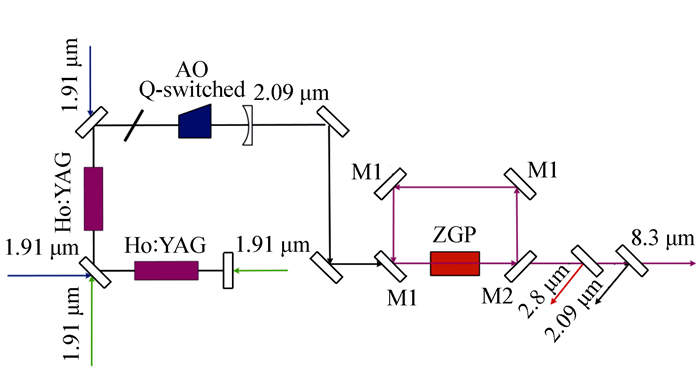
8~12 μm波段是大气的一个窗口,被定义为长波红外波段。该波段激光对雾、烟尘等具有较强的穿透力,在激光光电对抗、激光遥感、医疗、环境监测及光通讯领域具有重要的应用前景。本文调研了常用的8~12 μm非线性频率变换晶体,以及基于非线性频率变换晶体的远红外光参量振荡器的研究进展,对国内外能实现8~12 μm波段激光输出的非线性晶体及激光系统进行了系统地归纳和总结,通过分析比较得出在8~12 μm波段获得的最大输出能量为毫焦量级,最大功率为瓦量级。国内该技术与国外有着不小的差距,主要受制于高重频、高功率脉冲1~3 μm泵浦源技术不成熟及高性能非线性晶体材料研制基础薄弱,我国在长波远红外固体激光器领域研究进展缓慢,因此研制大尺寸、高质量远红外激光晶体及输出波长更长的远红外高功率激光器已经成为激光器未来发展方向之一。
8~12 μm波段是大气的一个窗口,被定义为长波红外波段。该波段激光对雾、烟尘等具有较强的穿透力,在激光光电对抗、激光遥感、医疗、环境监测及光通讯领域具有重要的应用前景。本文调研了常用的8~12 μm非线性频率变换晶体,以及基于非线性频率变换晶体的远红外光参量振荡器的研究进展,对国内外能实现8~12 μm波段激光输出的非线性晶体及激光系统进行了系统地归纳和总结,通过分析比较得出在8~12 μm波段获得的最大输出能量为毫焦量级,最大功率为瓦量级。国内该技术与国外有着不小的差距,主要受制于高重频、高功率脉冲1~3 μm泵浦源技术不成熟及高性能非线性晶体材料研制基础薄弱,我国在长波远红外固体激光器领域研究进展缓慢,因此研制大尺寸、高质量远红外激光晶体及输出波长更长的远红外高功率激光器已经成为激光器未来发展方向之一。

2018, 11(6): 901-913.
doi: 10.3788/CO.20181106.0901
摘要:
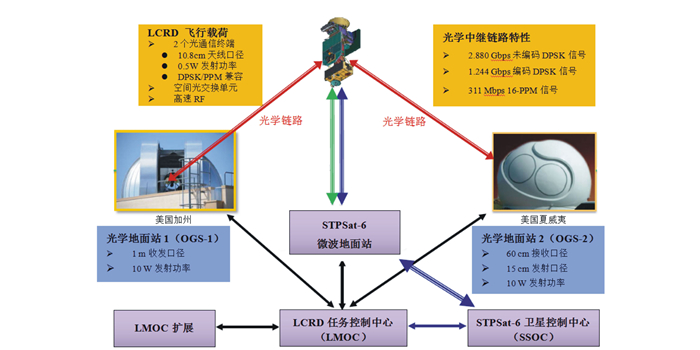
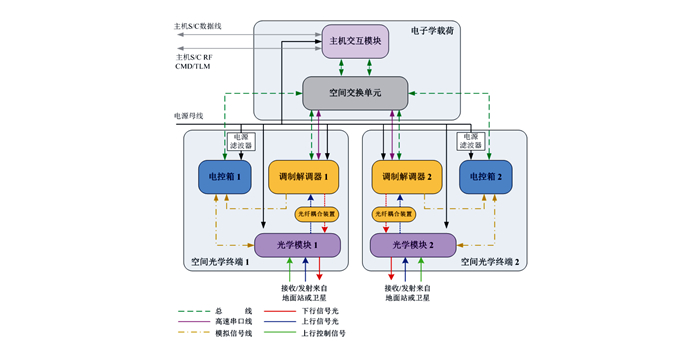
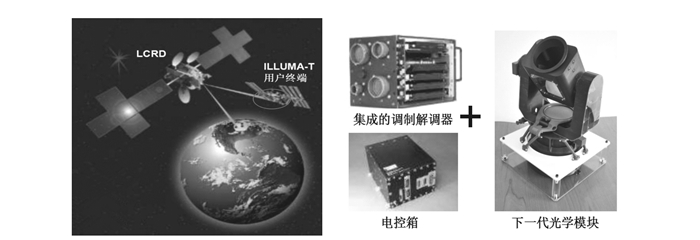
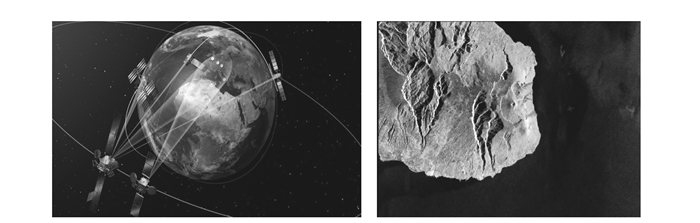
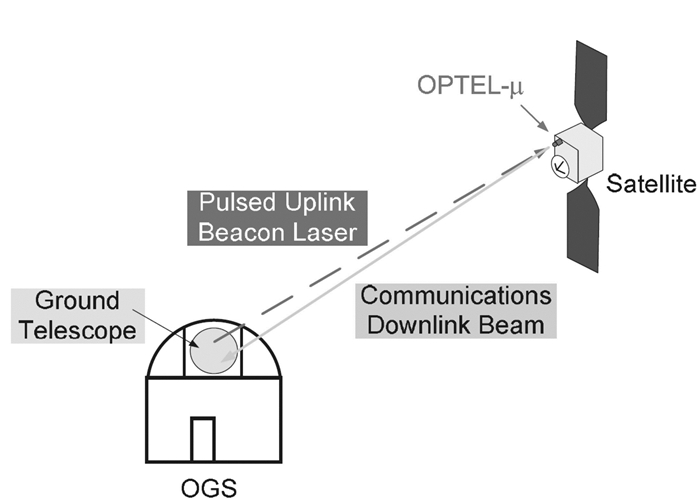
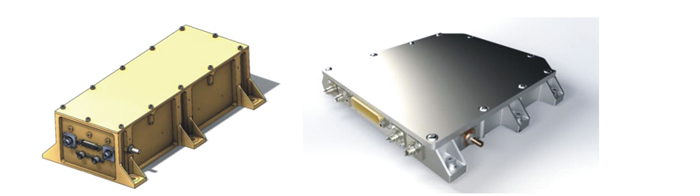
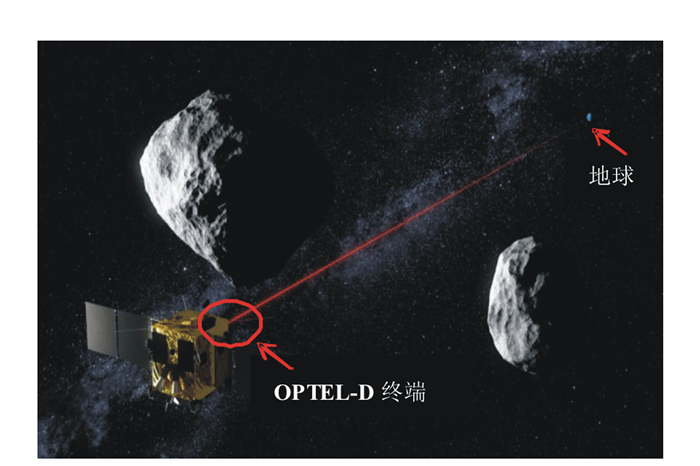
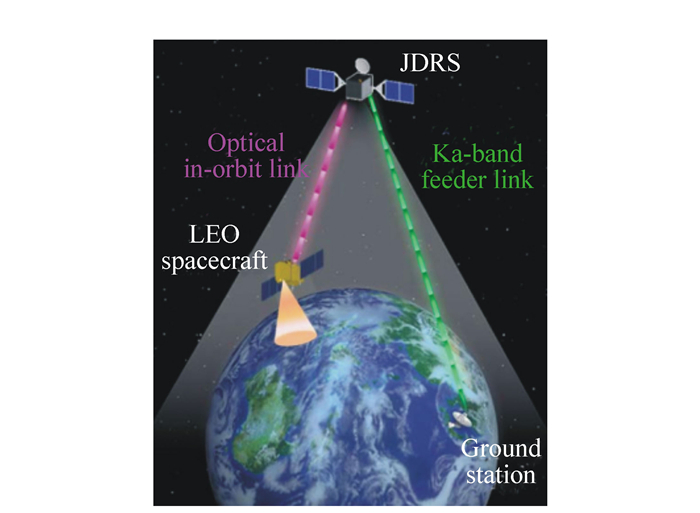
空间激光通信凭借其带宽优势,成为未来高速空间通信不可或缺的有效手段,是近年来国际上的研究热点。本文详细介绍了美国、欧洲和日本在空间激光通信技术领域的最新研究进展和未来发展规划,总结了国内外空间激光通信演示计划的主要参数指标。通过对空间激光通信最新研究计划的分析,归纳出空间激光通信高速化、深空化、集成化、网络化、一体化5个发展趋势,以及需要突破的高阶调制、高灵敏度探测、多制式兼容、"一对多"通信等关键技术。为我国激光通信设备及相关研究提供借鉴和参考。
空间激光通信凭借其带宽优势,成为未来高速空间通信不可或缺的有效手段,是近年来国际上的研究热点。本文详细介绍了美国、欧洲和日本在空间激光通信技术领域的最新研究进展和未来发展规划,总结了国内外空间激光通信演示计划的主要参数指标。通过对空间激光通信最新研究计划的分析,归纳出空间激光通信高速化、深空化、集成化、网络化、一体化5个发展趋势,以及需要突破的高阶调制、高灵敏度探测、多制式兼容、"一对多"通信等关键技术。为我国激光通信设备及相关研究提供借鉴和参考。







2018, 11(6): 914-930.
doi: 10.3788/CO.20181106.0914
摘要:
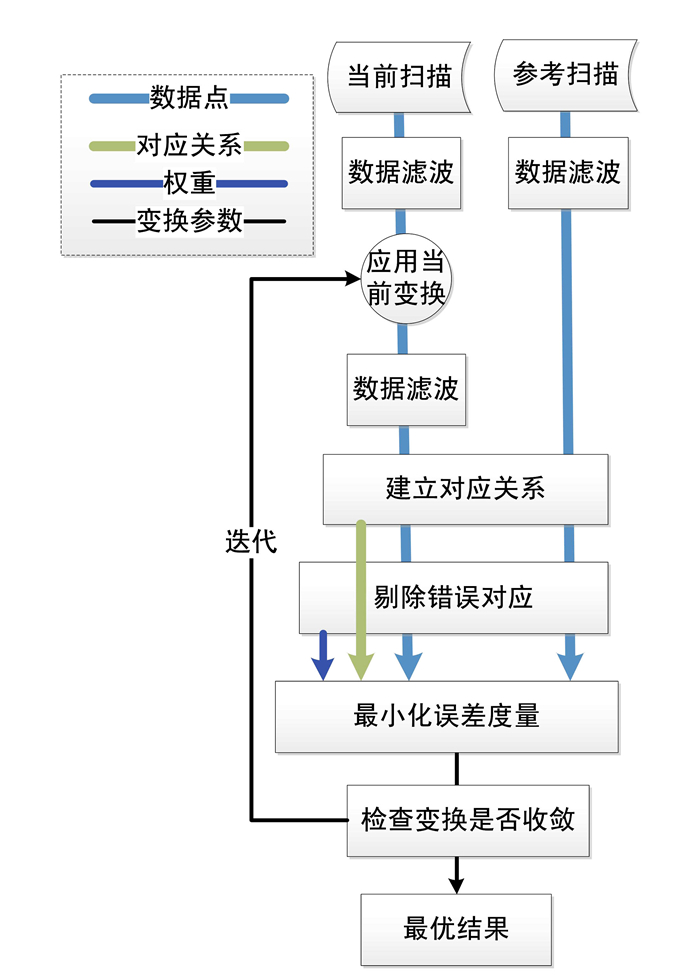
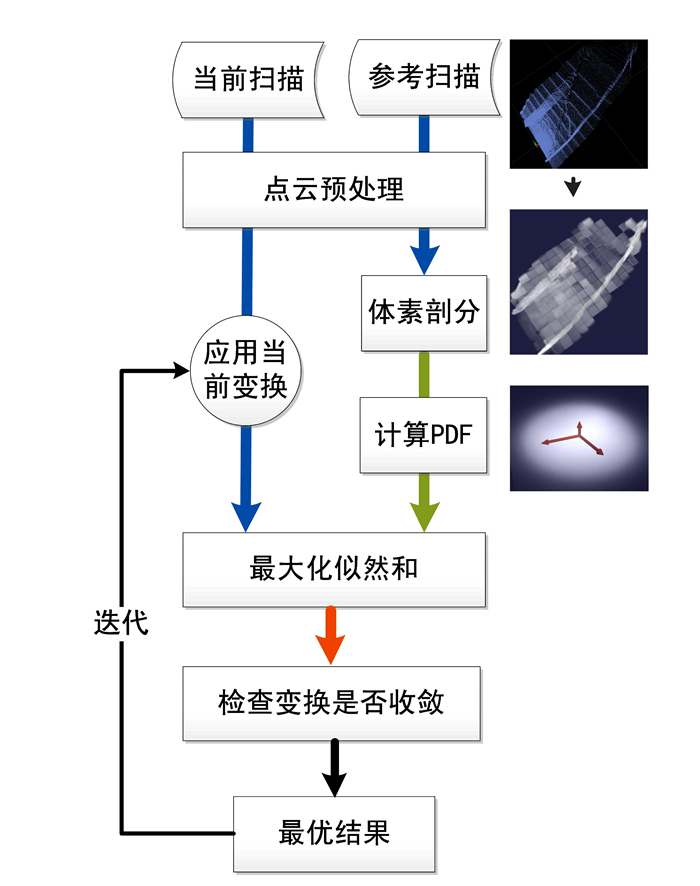
激光扫描匹配是利用激光雷达进行导航、定位与地图构建的基础,本文对各类激光扫描匹配方法进行了综述。将现有方法归纳为基于点的扫描匹配方法、基于特征的扫描匹配方法和基于数学特性的扫描匹配方法3类,系统总结了相应类型的常见方法;对典型的算法及其改进算法进行了梳理,并指出了存在的主要问题和发展趋势;介绍了激光扫描匹配方法性能评价和对比的最新研究进展,最后,展望了激光扫描匹配技术未来的研究方向。
激光扫描匹配是利用激光雷达进行导航、定位与地图构建的基础,本文对各类激光扫描匹配方法进行了综述。将现有方法归纳为基于点的扫描匹配方法、基于特征的扫描匹配方法和基于数学特性的扫描匹配方法3类,系统总结了相应类型的常见方法;对典型的算法及其改进算法进行了梳理,并指出了存在的主要问题和发展趋势;介绍了激光扫描匹配方法性能评价和对比的最新研究进展,最后,展望了激光扫描匹配技术未来的研究方向。

2018, 11(6): 931-948.
doi: 10.3788/CO.20181106.0931
摘要:
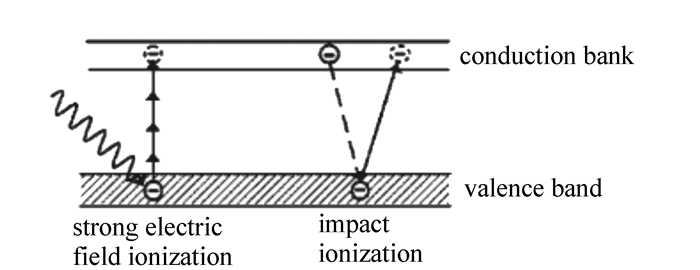
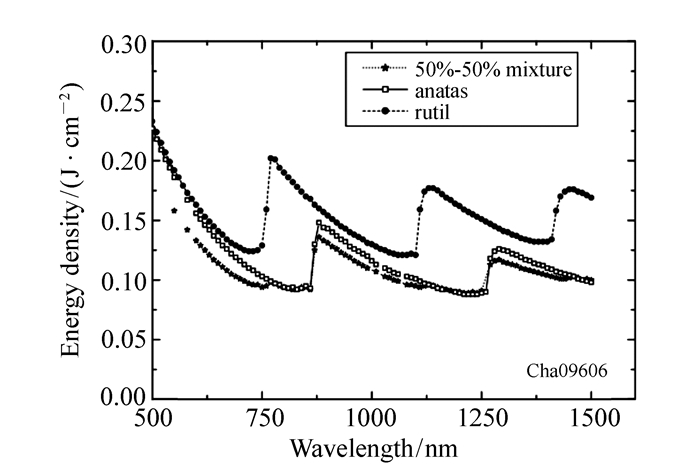
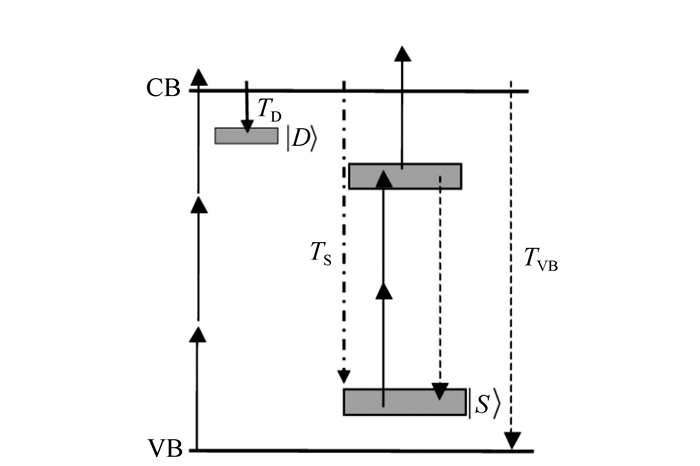
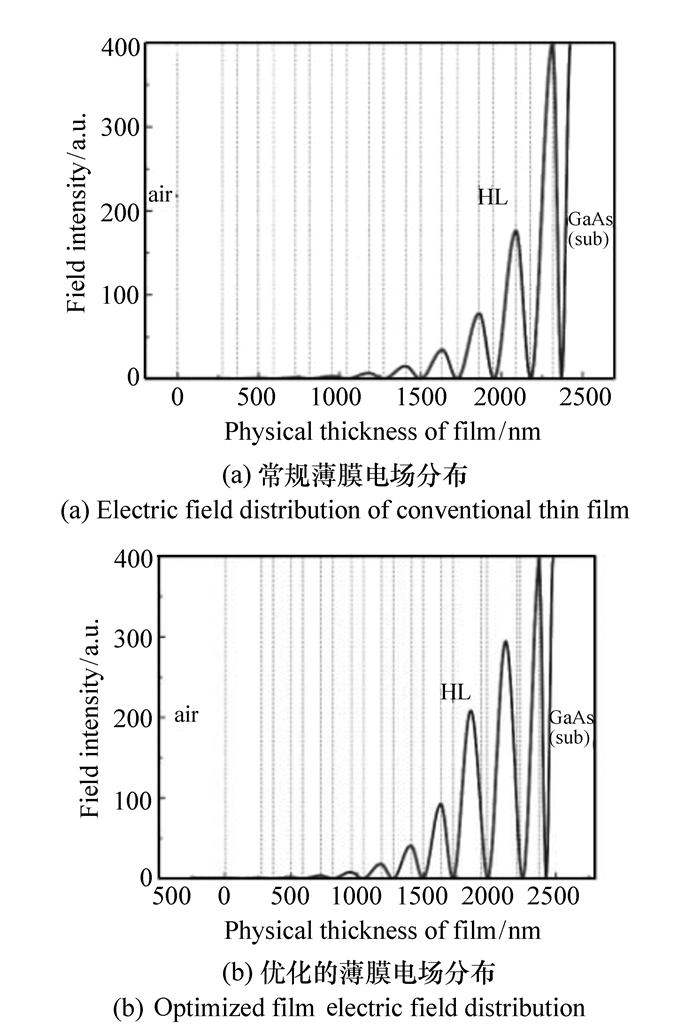
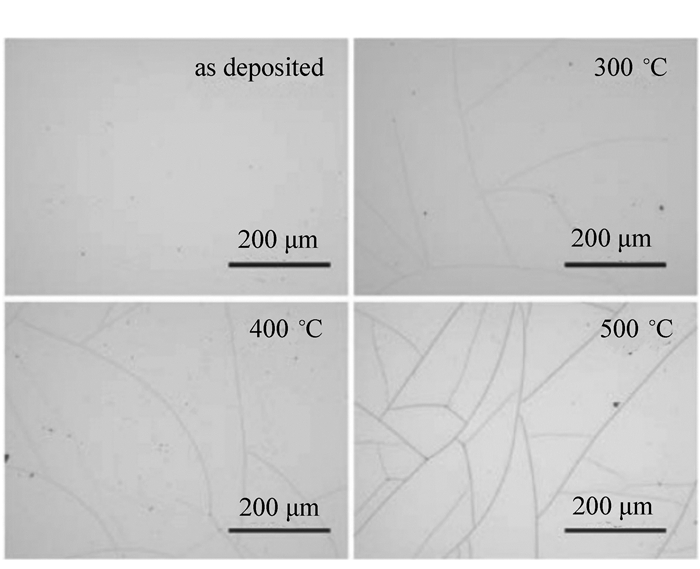
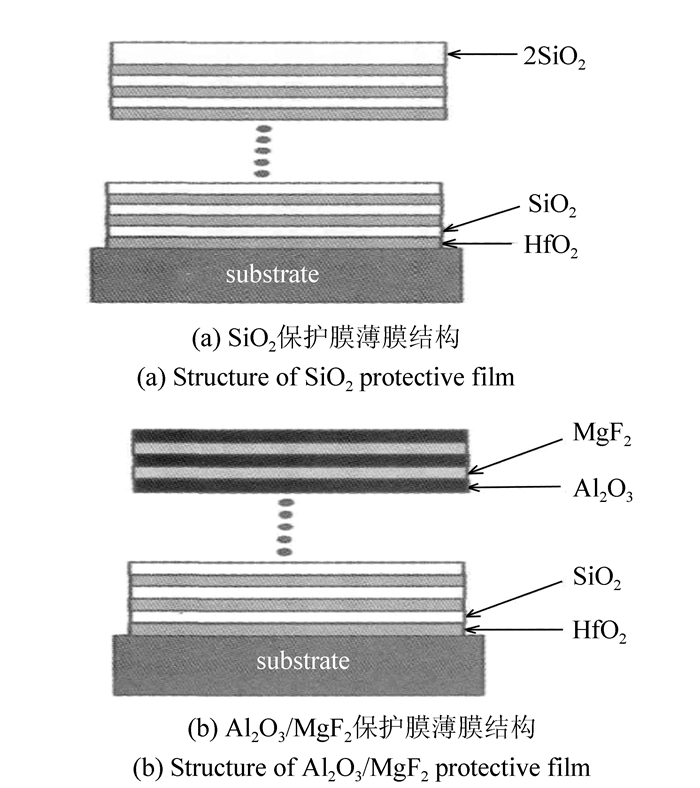
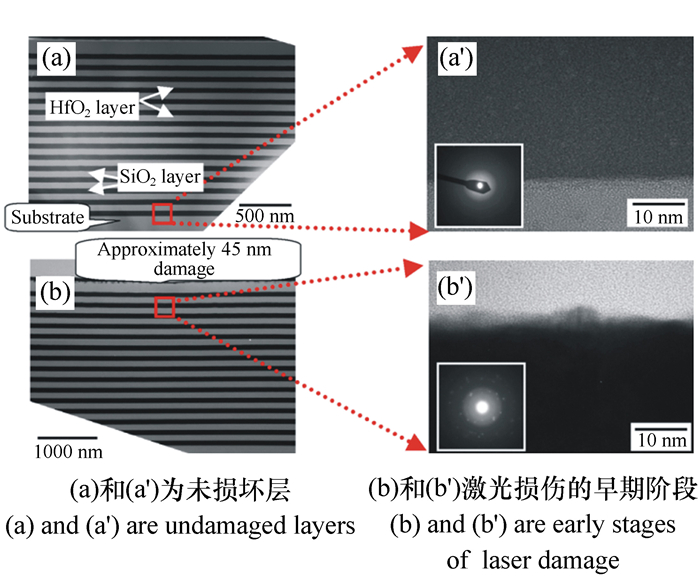
激光诱导损伤阈值是大功率光学系统中重要参数,其数值大小对激光系统的输出功率与稳定性具有重要影响。为了突破损伤阈值对激光光学系统输出功率的限制,科研人员主要从制备薄膜工艺、激光特性、薄膜特性以及薄膜后工艺等方面开展研究。本文介绍了高反膜理论、制备工艺;综述了近十年来国内外对高反膜损伤研究的成果;阐述了激光特性、薄膜特性以及薄膜后工艺对薄膜损伤阈值的影响。在此基础上,对提高高反膜损伤阈值的研究和发展趋势进行了分析与展望。
激光诱导损伤阈值是大功率光学系统中重要参数,其数值大小对激光系统的输出功率与稳定性具有重要影响。为了突破损伤阈值对激光光学系统输出功率的限制,科研人员主要从制备薄膜工艺、激光特性、薄膜特性以及薄膜后工艺等方面开展研究。本文介绍了高反膜理论、制备工艺;综述了近十年来国内外对高反膜损伤研究的成果;阐述了激光特性、薄膜特性以及薄膜后工艺对薄膜损伤阈值的影响。在此基础上,对提高高反膜损伤阈值的研究和发展趋势进行了分析与展望。





2018, 11(6): 949-957.
doi: 10.3788/CO.20181106.0949
摘要:
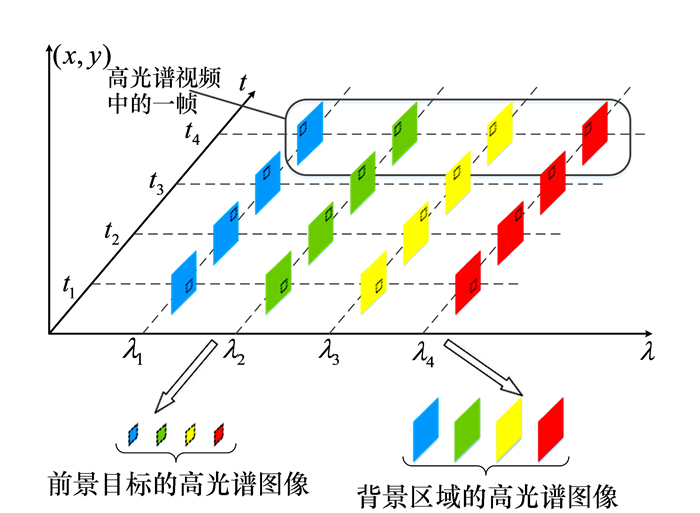
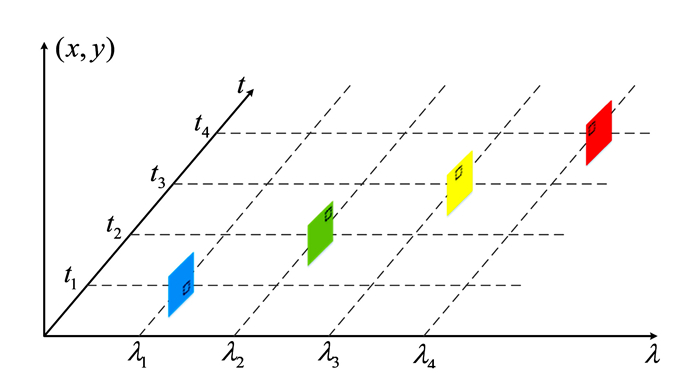
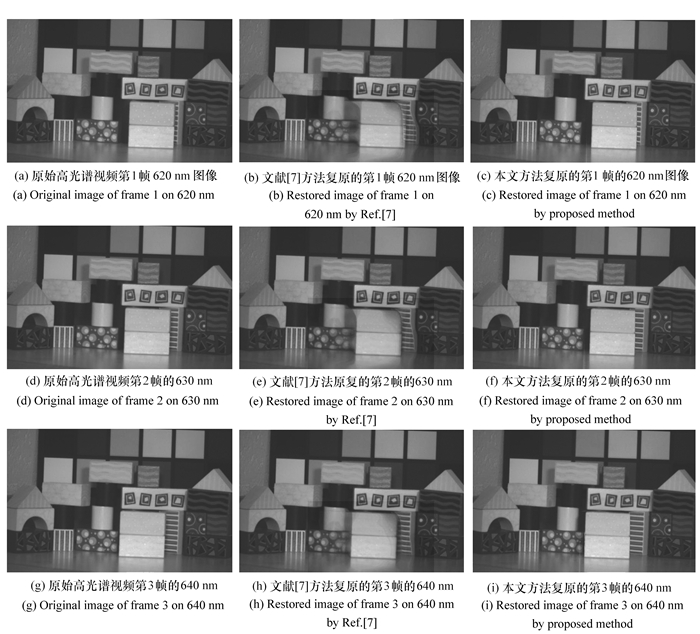
针对液晶可调滤波片高光谱成像系统记录动态场景的成像特点,提出一种图-谱结合的压缩感知高光谱视频图像复原方法。首先,通过前景目标检测获得运动前景目标的高光谱图像,实现运动前景目标与背景区域分离,并根据前景目标检测结果将背景区域划分为运动区域(被前景目标遮挡区域)与静止区域(未被前景目标遮挡区域)。然后,基于高光谱图像空间维、光谱维相关性,对静止区域进行字典学习获得稀疏先验信息,结合压缩感知理论用于运动区域恢复,得到完整的背景区域高光谱图像。最后,将运动前景目标高光谱图像与背景区域高光谱图像相结合,得到高光谱视频图像。实验结果表明:本文提出的高光谱视频图像复原方法在峰值信噪比和视觉效果上都要优于现有算法,峰值信噪比平均提高5 dB以上。
针对液晶可调滤波片高光谱成像系统记录动态场景的成像特点,提出一种图-谱结合的压缩感知高光谱视频图像复原方法。首先,通过前景目标检测获得运动前景目标的高光谱图像,实现运动前景目标与背景区域分离,并根据前景目标检测结果将背景区域划分为运动区域(被前景目标遮挡区域)与静止区域(未被前景目标遮挡区域)。然后,基于高光谱图像空间维、光谱维相关性,对静止区域进行字典学习获得稀疏先验信息,结合压缩感知理论用于运动区域恢复,得到完整的背景区域高光谱图像。最后,将运动前景目标高光谱图像与背景区域高光谱图像相结合,得到高光谱视频图像。实验结果表明:本文提出的高光谱视频图像复原方法在峰值信噪比和视觉效果上都要优于现有算法,峰值信噪比平均提高5 dB以上。




2018, 11(6): 958-973.
doi: 10.3788/CO.20181106.0958
摘要:
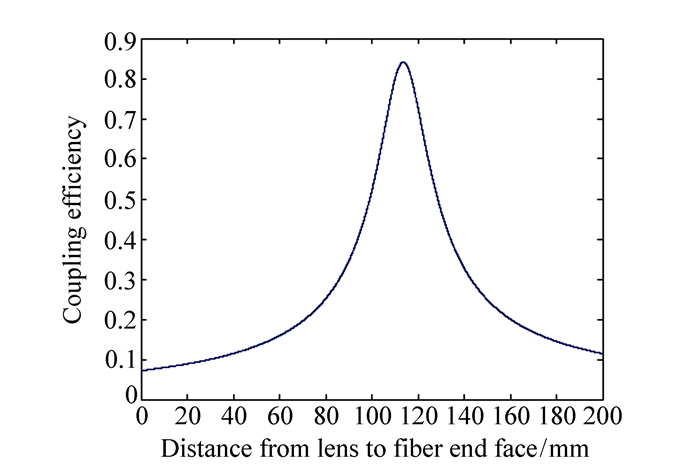
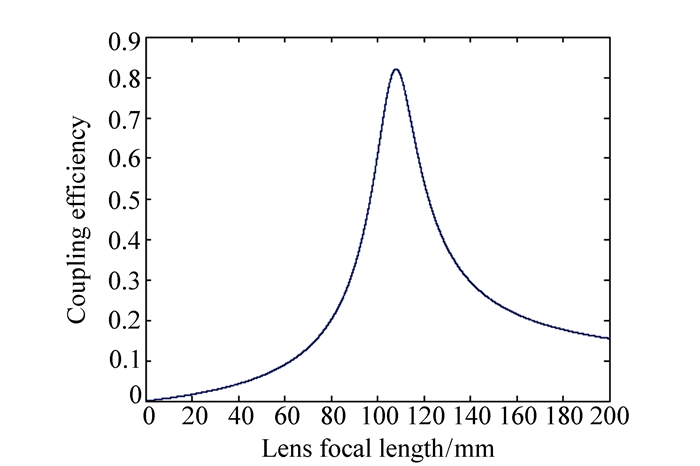
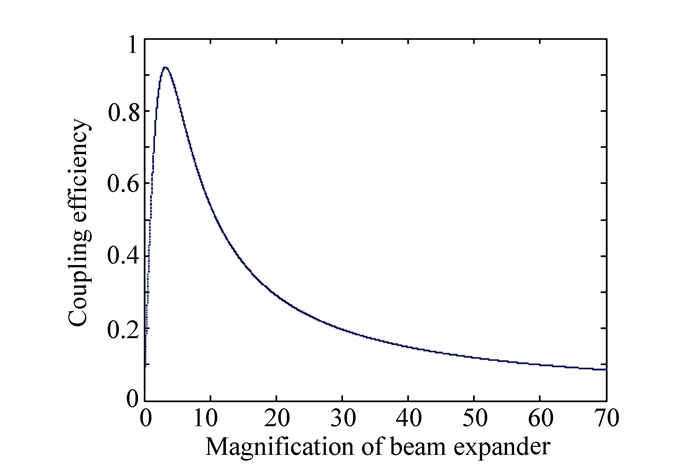
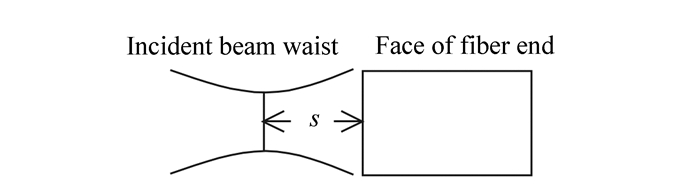
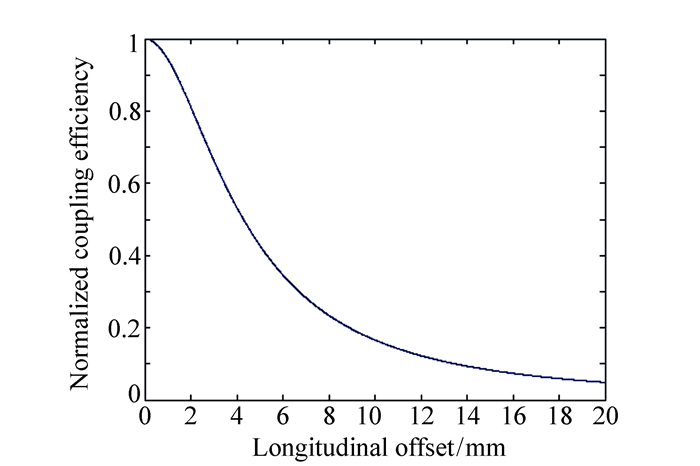
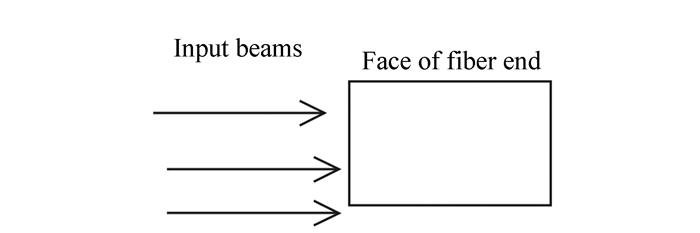
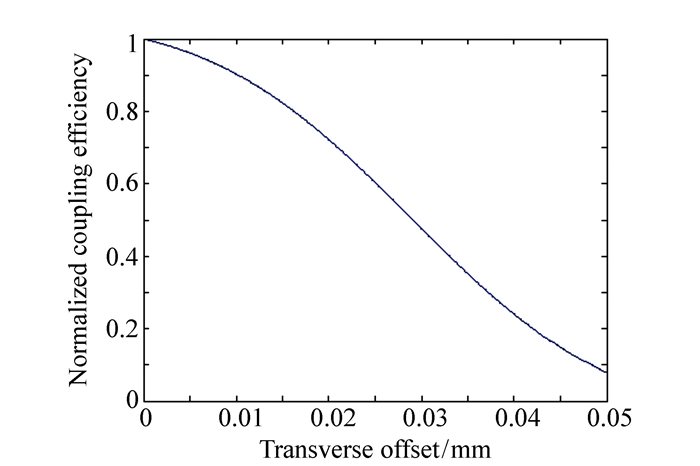
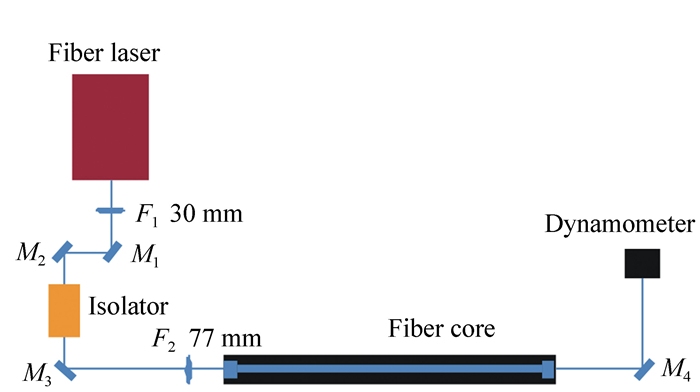
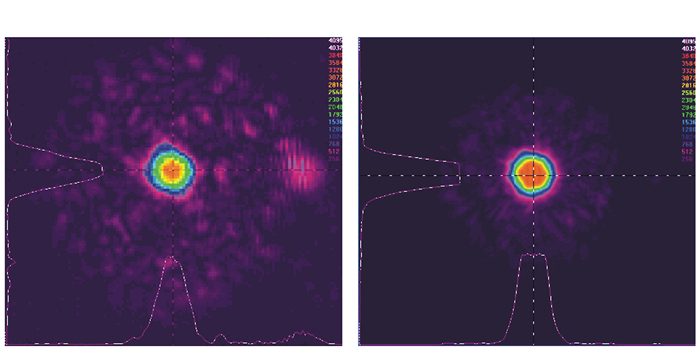
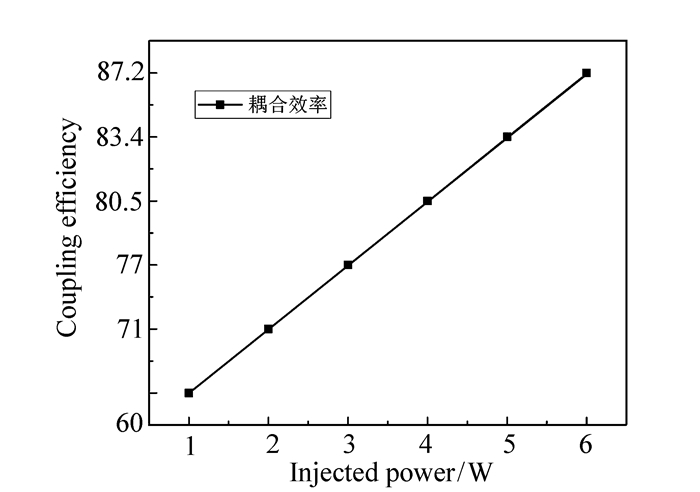
耦合效率的高低与耦合后光斑的好坏直接影响着光子晶体光纤棒的放大效果,因此需要对种子光的耦合效果进行研究,选择合适的激光器作为种子源。本文对光子晶体光纤棒在固体激光器与光纤激光器两种情况下的耦合效率进行了理论分析;模拟计算了两种激光器情况下耦合效率的变化规律以及对准误差对耦合效率的影响;选择合适的透镜或透镜组,使用两种激光器对光子晶体光纤棒进行了耦合实验;对比两种激光器的耦合效果可知:固体激光器的耦合效率最高只能达到62.4%,而光纤激光器的耦合效率可以达到80%以上;在光纤激光器耦合情况下,对不同功率注入时耦合效率,以及耦合后光斑进行了实验分析。得到的实验结果对后续光纤棒的放大实验具有指导作用。
耦合效率的高低与耦合后光斑的好坏直接影响着光子晶体光纤棒的放大效果,因此需要对种子光的耦合效果进行研究,选择合适的激光器作为种子源。本文对光子晶体光纤棒在固体激光器与光纤激光器两种情况下的耦合效率进行了理论分析;模拟计算了两种激光器情况下耦合效率的变化规律以及对准误差对耦合效率的影响;选择合适的透镜或透镜组,使用两种激光器对光子晶体光纤棒进行了耦合实验;对比两种激光器的耦合效果可知:固体激光器的耦合效率最高只能达到62.4%,而光纤激光器的耦合效率可以达到80%以上;在光纤激光器耦合情况下,对不同功率注入时耦合效率,以及耦合后光斑进行了实验分析。得到的实验结果对后续光纤棒的放大实验具有指导作用。






2018, 11(6): 974-982.
doi: 10.3788/CO.20181106.0974
摘要:
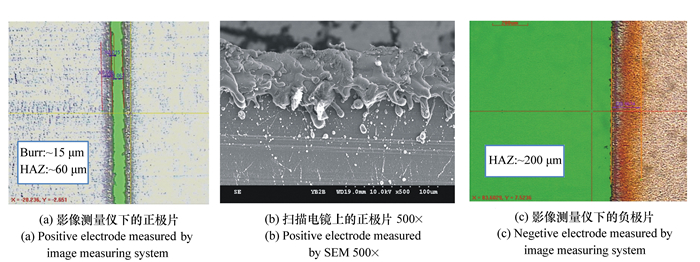
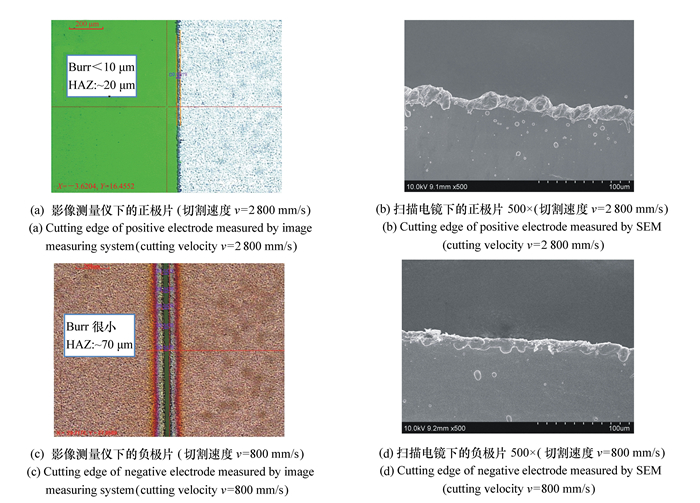
为适应锂离子动力电池行业发展需求,寻求一种高效高质切片方式,本文研究了多种激光器的切片质量。通过影像测量仪和扫描电镜(SEM)对比发现,100 ns脉宽调Q型1 064 nm光纤激光器切割正极铝箔时毛刺和热影响区(HAZ)约为15 μm和60 μm,切负极铜箔时HAZ约为200 μm;20 ns脉宽的MOPA光纤激光器切割铝箔毛刺10 μm,HAZ约为20 μm,切铜箔时HAZ约70 μm;脉宽为10 ps的固体激光器切割铝箔毛刺和HAZ分别约为6 μm和10 μm,切铜箔时实现无熔融重凝区;20 ns脉宽的355 nm紫外和532 nm的绿光固体激光器切割铝箔HAZ分别为10 μm和17 μm,切铜箔时HAZ则分别为大于70 μm和100 μm。实验结果表明:脉宽越窄,重复频率越高,切割的极片质量越好,ps激光器切割的极片精度最高,质量最好,是切割极片最理想激光器。而目前,频率高、脉宽相对窄的MOPA光纤激光器切割速度最高,切割的正极片完全满足工业要求,更适合极片切割的工业推广。
为适应锂离子动力电池行业发展需求,寻求一种高效高质切片方式,本文研究了多种激光器的切片质量。通过影像测量仪和扫描电镜(SEM)对比发现,100 ns脉宽调Q型1 064 nm光纤激光器切割正极铝箔时毛刺和热影响区(HAZ)约为15 μm和60 μm,切负极铜箔时HAZ约为200 μm;20 ns脉宽的MOPA光纤激光器切割铝箔毛刺10 μm,HAZ约为20 μm,切铜箔时HAZ约70 μm;脉宽为10 ps的固体激光器切割铝箔毛刺和HAZ分别约为6 μm和10 μm,切铜箔时实现无熔融重凝区;20 ns脉宽的355 nm紫外和532 nm的绿光固体激光器切割铝箔HAZ分别为10 μm和17 μm,切铜箔时HAZ则分别为大于70 μm和100 μm。实验结果表明:脉宽越窄,重复频率越高,切割的极片质量越好,ps激光器切割的极片精度最高,质量最好,是切割极片最理想激光器。而目前,频率高、脉宽相对窄的MOPA光纤激光器切割速度最高,切割的正极片完全满足工业要求,更适合极片切割的工业推广。


2018, 11(6): 983-990.
doi: 10.3788/CO.20181106.0983
摘要:
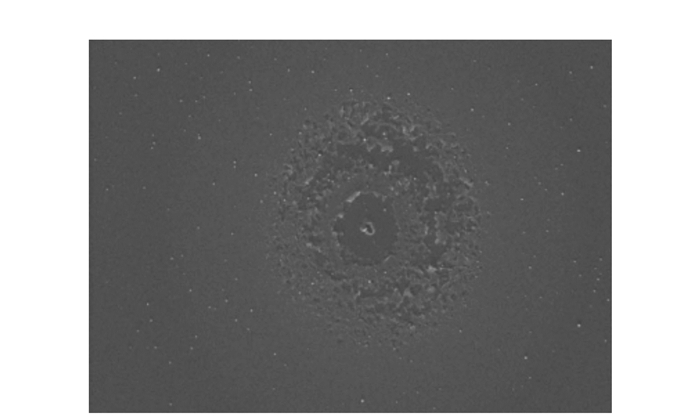
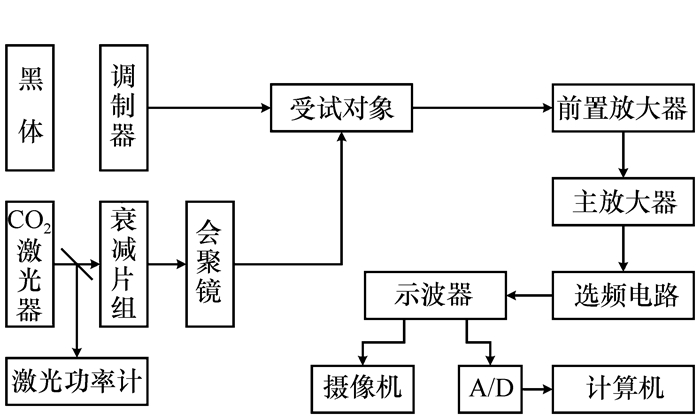
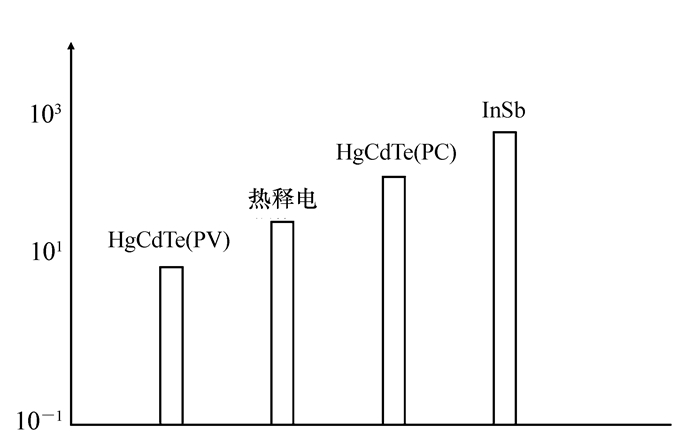
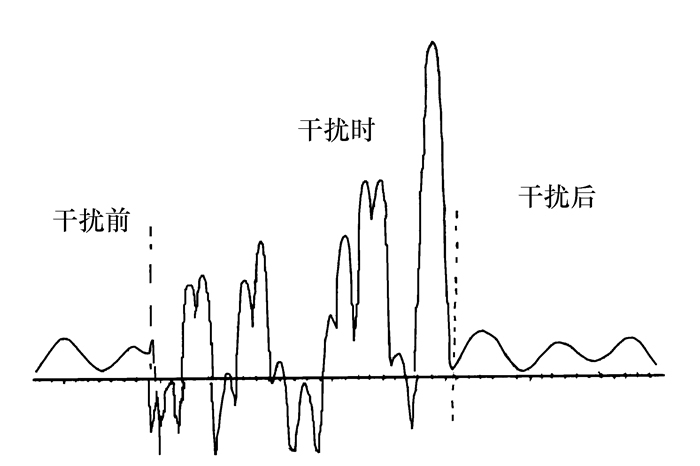
本文针对高重频CO2激光干扰技术展开分析和研究。首先,概述了激光对抗武器的概念、分类和特点,以及激光对抗武器的干扰与破坏的主要目标对象。其次,分析了红外探测器激光干扰损伤效果的检测方法。再次,分析了光学元件激光变形损伤效果的检测方法以及光学薄膜的激光损伤检测方法。按照上述检测方法进行实验,分别对红外单元探测器、光学元件、光学薄膜和其他材料的激光损伤阈值实验数据进行分析与讨论。最后,总结了全文并且展望了激光干扰技术的发展。
本文针对高重频CO2激光干扰技术展开分析和研究。首先,概述了激光对抗武器的概念、分类和特点,以及激光对抗武器的干扰与破坏的主要目标对象。其次,分析了红外探测器激光干扰损伤效果的检测方法。再次,分析了光学元件激光变形损伤效果的检测方法以及光学薄膜的激光损伤检测方法。按照上述检测方法进行实验,分别对红外单元探测器、光学元件、光学薄膜和其他材料的激光损伤阈值实验数据进行分析与讨论。最后,总结了全文并且展望了激光干扰技术的发展。


2018, 11(6): 991-1000.
doi: 10.3788/CO.20181106.0991
摘要:
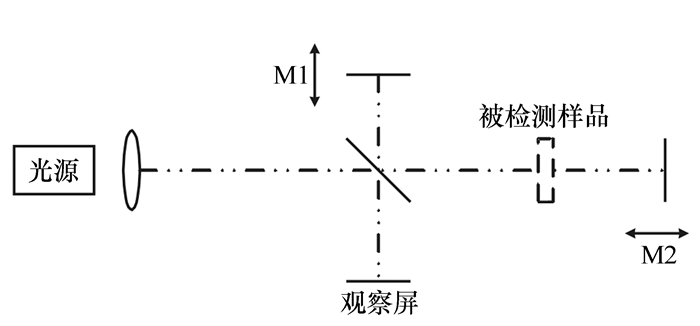
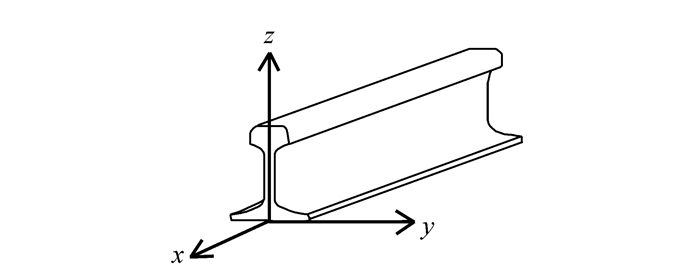
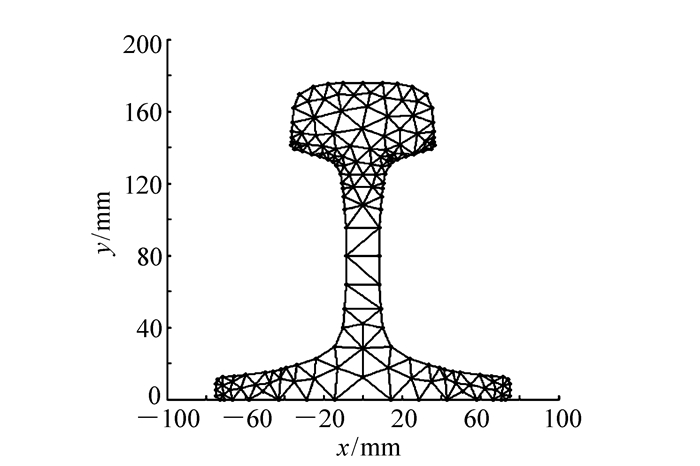
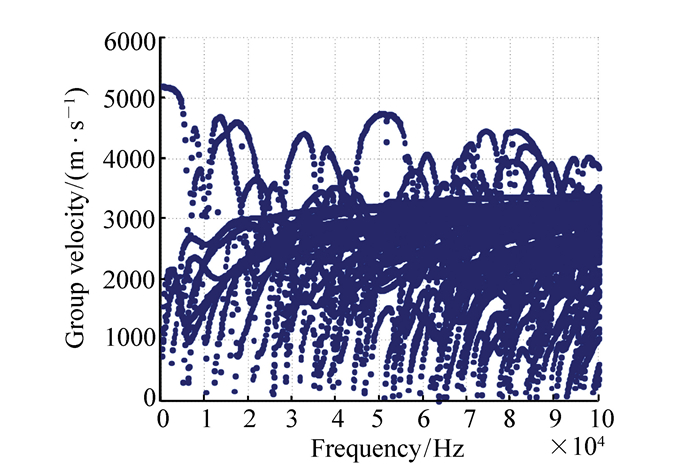
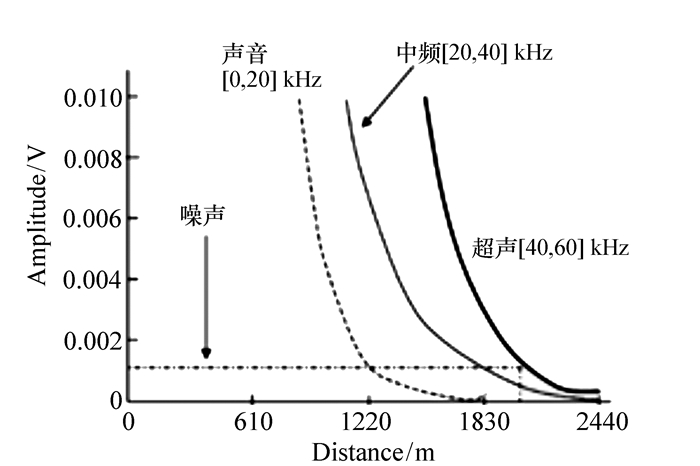
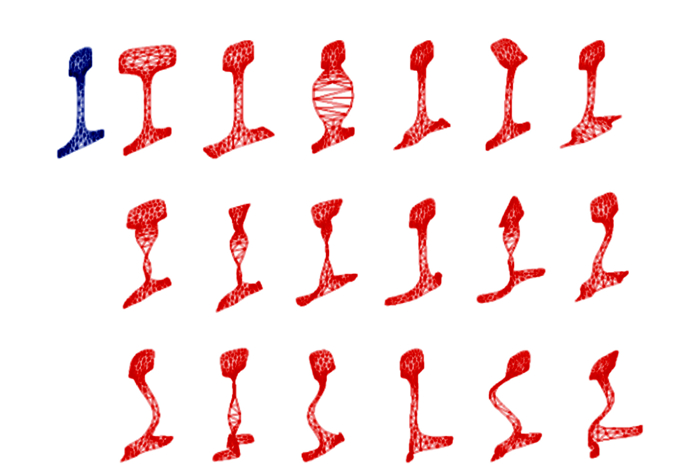
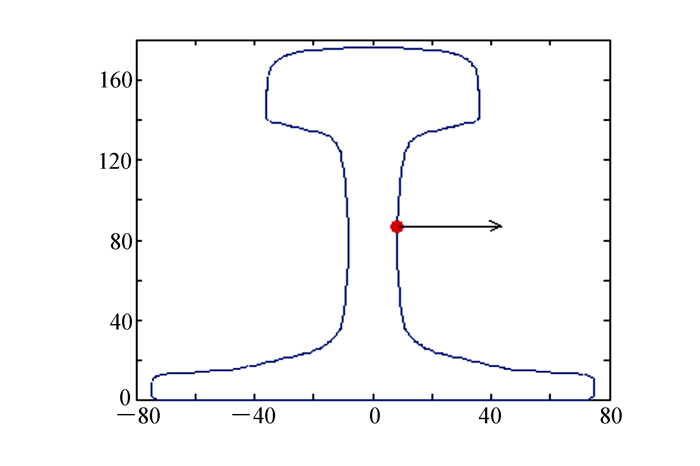
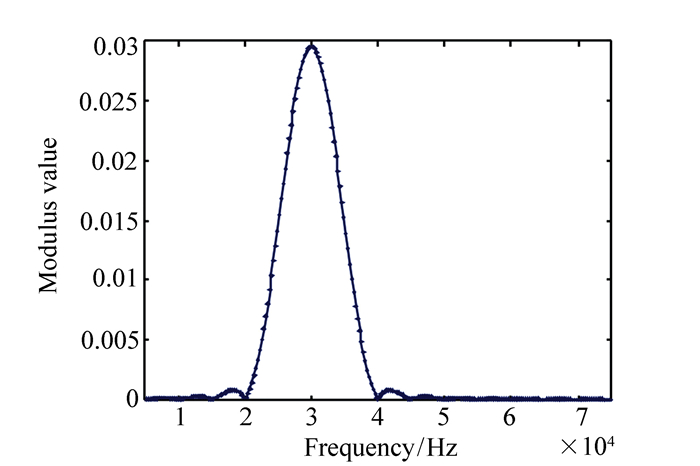
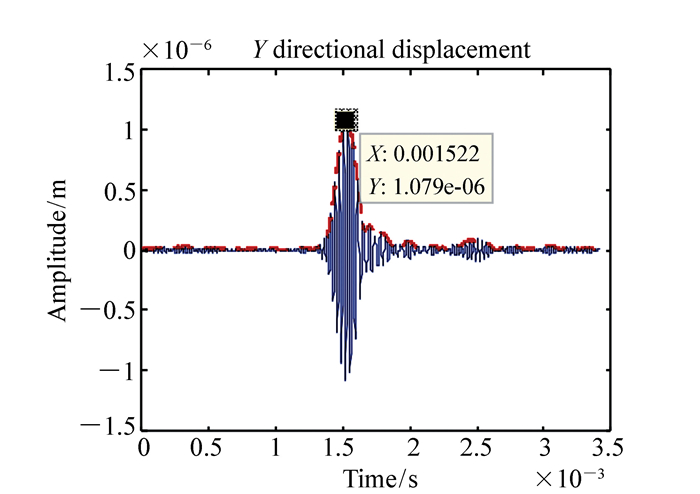
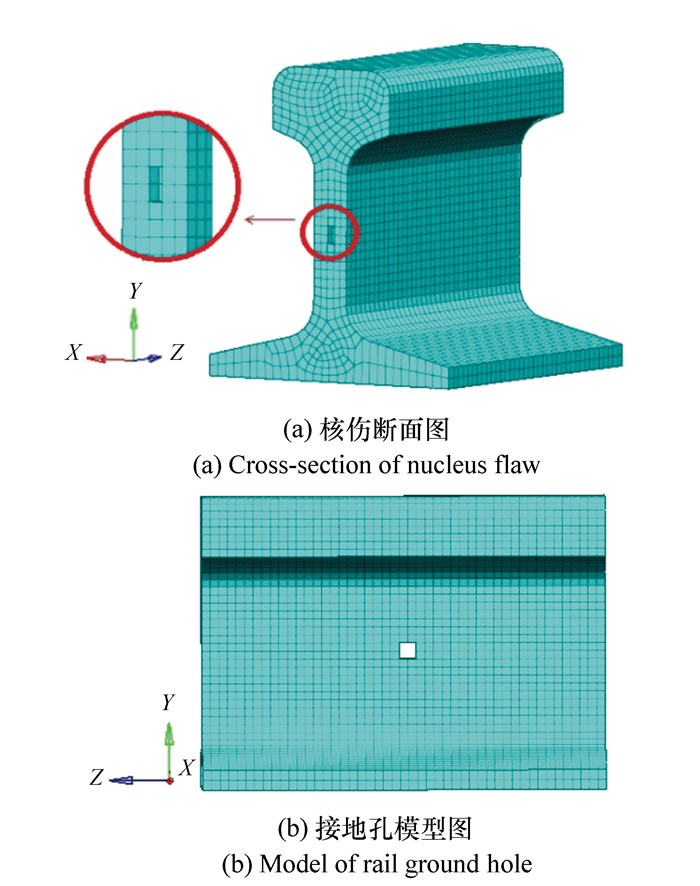
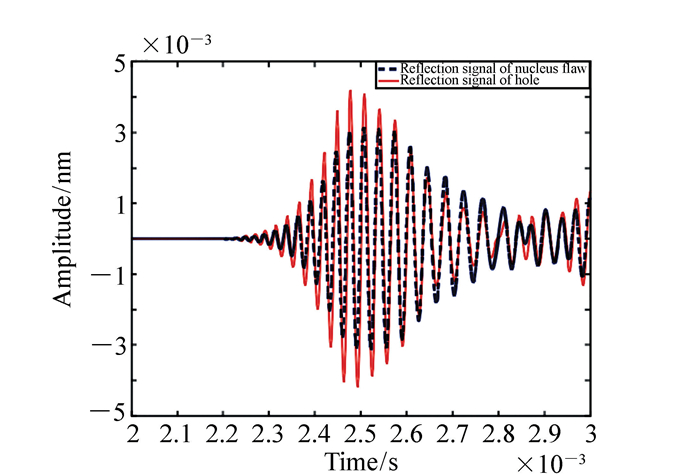
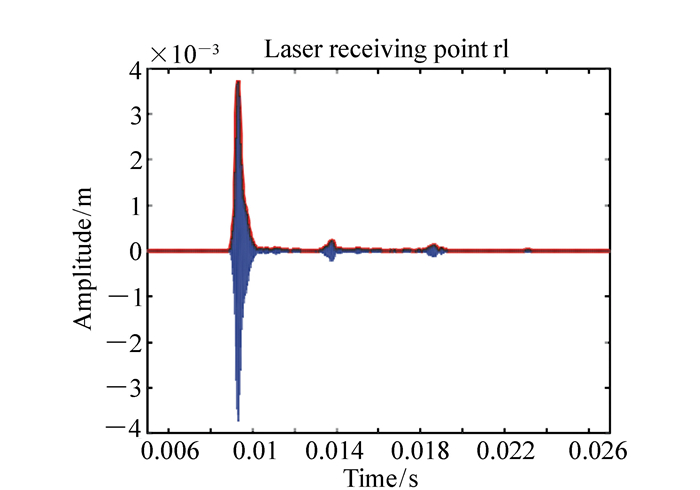
针对现阶段我国铁路上应用的探伤设备只能在天窗时间进行人工巡检,无法在线监测的问题,提出一种基于超声导波的激光多普勒频移法钢轨内部缺陷监测方法。首先,引入环境温度作为变量改进了半解析有限元方法,并应用该方法获得了我国无缝线路CHN60钢轨在特定温度下的频散曲线。通过分析振型并结合激励响应算法确定了适于检测缺陷的模态及其激励方式,从而激励该超声导波模态使其在钢轨中传播。然后,应用半反半透玻璃镜将激光分为参考光和测量光,测量光通过Bragg Cell进行频偏照射钢轨表面,通过反射光产生的多普勒频移与参考光干涉得到光强度变化曲线,经过信号处理及标定测得钢轨内部缺陷的回波速度信号,再经过数字化处理和计算得到缺陷的位置。最后,在北京环形铁路试验基地进行了现场实验,以钢轨接地孔模拟钢轨内部核伤,得到缺陷定位误差均小于0.5 m,验证了该方法的可行性。使用激光多普勒频移方法检测导波信号从而定位缺陷的方法可以有效避免由于换能器接触性测量而产生的误差。该方法在不影响列车的正常运营的同时,实现了全天候无间断的在线监测,提高了检测效率。
针对现阶段我国铁路上应用的探伤设备只能在天窗时间进行人工巡检,无法在线监测的问题,提出一种基于超声导波的激光多普勒频移法钢轨内部缺陷监测方法。首先,引入环境温度作为变量改进了半解析有限元方法,并应用该方法获得了我国无缝线路CHN60钢轨在特定温度下的频散曲线。通过分析振型并结合激励响应算法确定了适于检测缺陷的模态及其激励方式,从而激励该超声导波模态使其在钢轨中传播。然后,应用半反半透玻璃镜将激光分为参考光和测量光,测量光通过Bragg Cell进行频偏照射钢轨表面,通过反射光产生的多普勒频移与参考光干涉得到光强度变化曲线,经过信号处理及标定测得钢轨内部缺陷的回波速度信号,再经过数字化处理和计算得到缺陷的位置。最后,在北京环形铁路试验基地进行了现场实验,以钢轨接地孔模拟钢轨内部核伤,得到缺陷定位误差均小于0.5 m,验证了该方法的可行性。使用激光多普勒频移方法检测导波信号从而定位缺陷的方法可以有效避免由于换能器接触性测量而产生的误差。该方法在不影响列车的正常运营的同时,实现了全天候无间断的在线监测,提高了检测效率。






2018, 11(6): 1001-1010.
doi: 10.3788/CO.20181106.1001
摘要:
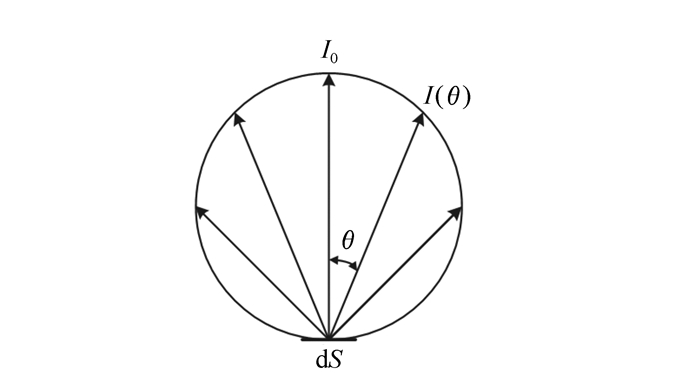
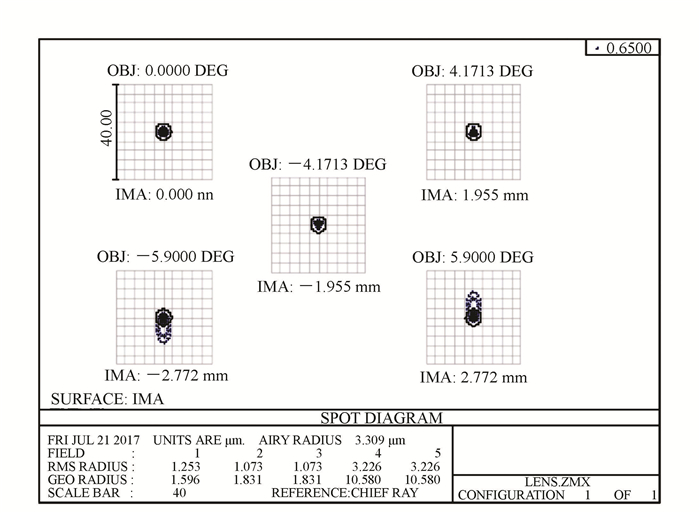
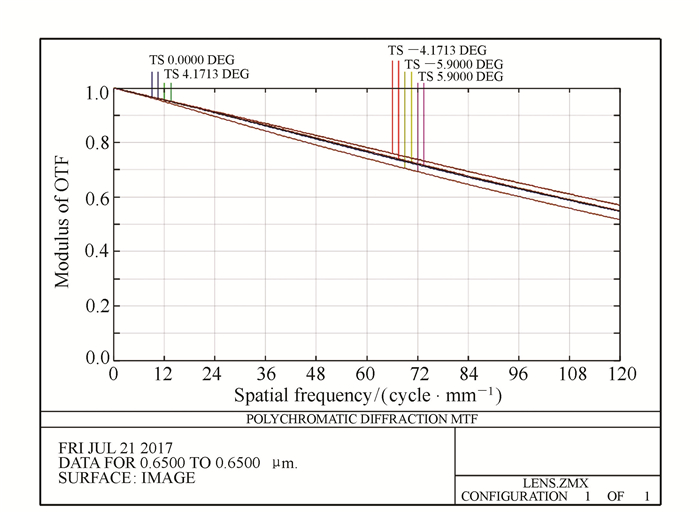
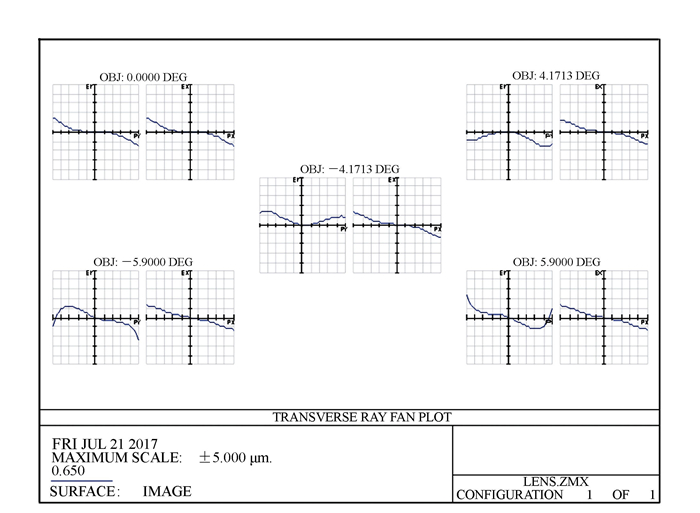
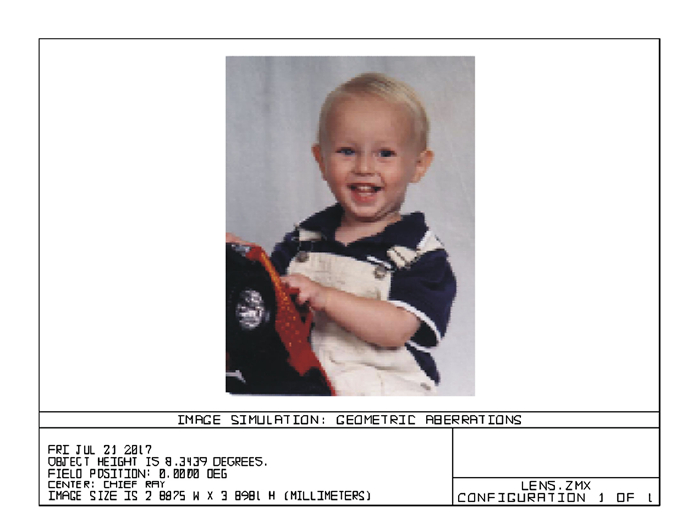
光斑质量直接影响激光位移传感器测量的精度。为了提高激光位移传感器传感探头光学系统的成像质量,设计了传感探头四片式微小型光学系统。本文在理想成像基础上,分析光束在光学系统中能量传递的变化规律,对比光电探测器的感光能力,利用光学设计软件(ZEMAX)实现了激光位移传感器传感探头微小型光学系统的设计。通过理论计算分析,严格控制传感探头孔径光阑的大小,对光学系统进行优化处理,成像最大弥散斑半径低于3.3 μm,空间分辨率120 lp/mm以下的传递函数MTF(Modulation Transfer Function)值大于0.5,光线扇形图的最大像差小于5 μm,畸变量低于0.1859%。该光学系统具有良好的成像效果,可以满足激光位移传感器探测系统对成像系统成像光斑质量的要求,以保证传感器的测量精确度优于5 μm。
光斑质量直接影响激光位移传感器测量的精度。为了提高激光位移传感器传感探头光学系统的成像质量,设计了传感探头四片式微小型光学系统。本文在理想成像基础上,分析光束在光学系统中能量传递的变化规律,对比光电探测器的感光能力,利用光学设计软件(ZEMAX)实现了激光位移传感器传感探头微小型光学系统的设计。通过理论计算分析,严格控制传感探头孔径光阑的大小,对光学系统进行优化处理,成像最大弥散斑半径低于3.3 μm,空间分辨率120 lp/mm以下的传递函数MTF(Modulation Transfer Function)值大于0.5,光线扇形图的最大像差小于5 μm,畸变量低于0.1859%。该光学系统具有良好的成像效果,可以满足激光位移传感器探测系统对成像系统成像光斑质量的要求,以保证传感器的测量精确度优于5 μm。





2018, 11(6): 1011-1016.
doi: 10.3788/CO.20181106.1011
摘要:
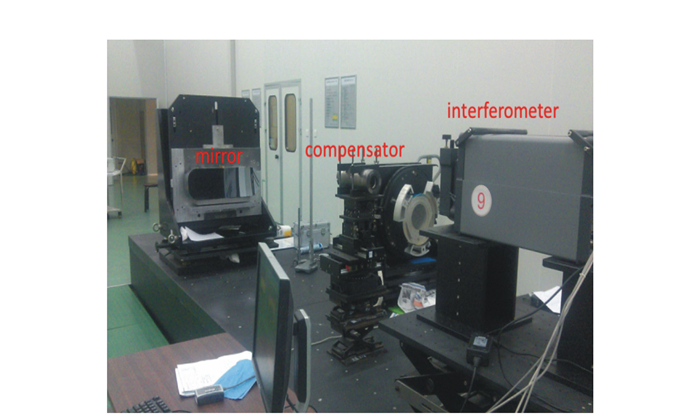
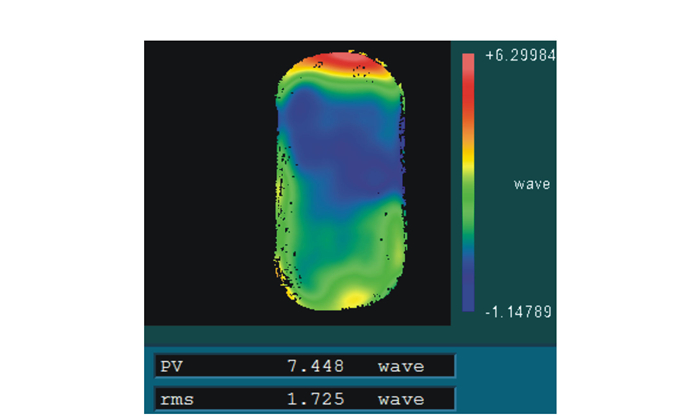
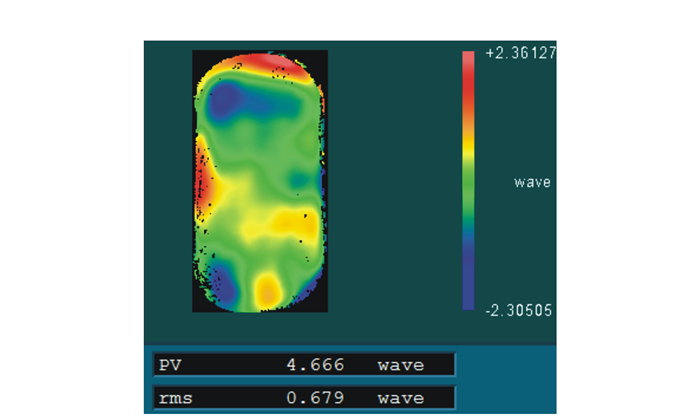
为了解决长条形镜面面形拟合中各项不正交,无法在调整中利用像差指导计算机辅助装调的问题,本文建立了一套合理的拟合模型。该模型以矩阵求解正交化Zernike多项式系数为基础,将离散的数据点作为定义域,对已选取的Zernike项进行定义域内正交化计算,并以获得的各正交项为基底,实现对长条形镜面及其他异形光学镜面的正交化多项式拟合求解。进而确定在干涉检测中加工误差与装调误差的分离,为光学镜面的最终面形收敛提供保障。根据本文实验结果,对一口径600 mm×260 mm,PV与RMS值分别为5.889λ及1.002λ的长条形光学镜面进行拟合,利用Metropro去像散后,面形未得到收敛,PV与RMS值分别变为7.448λ及1.725λ。而采用本文算法处理后,其PV与RMS值分别收敛为4.666λ及0.679λ,验证了本文方法对于长条形镜面拟合的正确性。
为了解决长条形镜面面形拟合中各项不正交,无法在调整中利用像差指导计算机辅助装调的问题,本文建立了一套合理的拟合模型。该模型以矩阵求解正交化Zernike多项式系数为基础,将离散的数据点作为定义域,对已选取的Zernike项进行定义域内正交化计算,并以获得的各正交项为基底,实现对长条形镜面及其他异形光学镜面的正交化多项式拟合求解。进而确定在干涉检测中加工误差与装调误差的分离,为光学镜面的最终面形收敛提供保障。根据本文实验结果,对一口径600 mm×260 mm,PV与RMS值分别为5.889λ及1.002λ的长条形光学镜面进行拟合,利用Metropro去像散后,面形未得到收敛,PV与RMS值分别变为7.448λ及1.725λ。而采用本文算法处理后,其PV与RMS值分别收敛为4.666λ及0.679λ,验证了本文方法对于长条形镜面拟合的正确性。

2018, 11(6): 1017-1023.
doi: 10.3788/CO.20181106.1017
摘要:
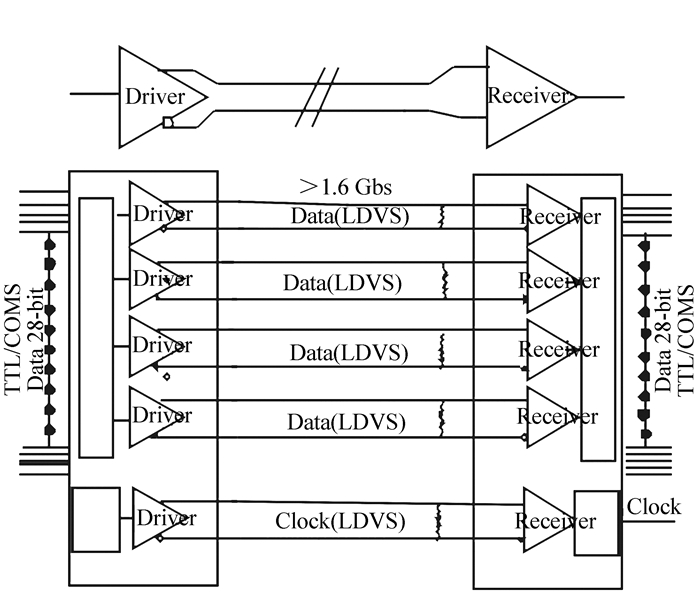
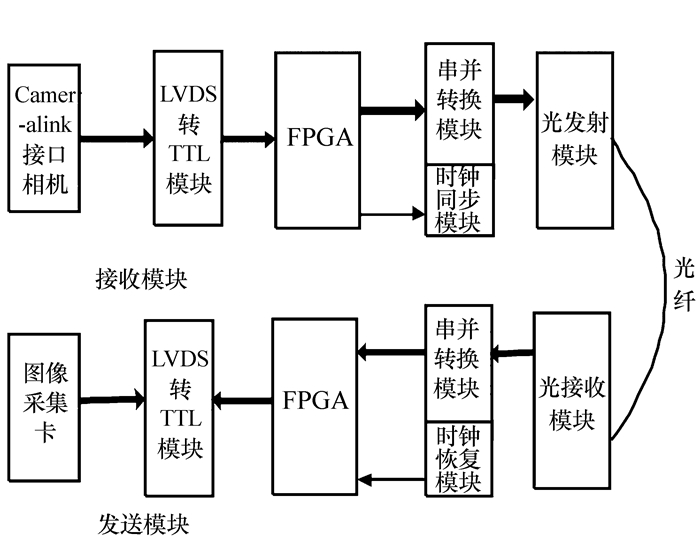
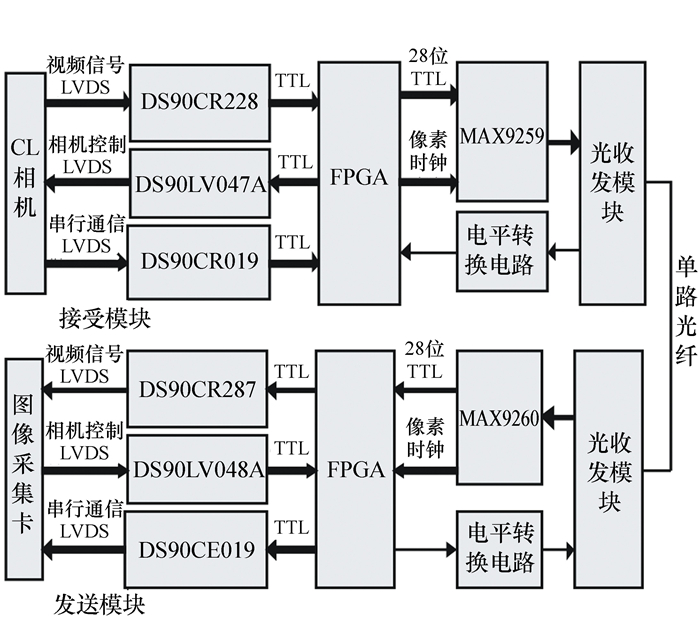
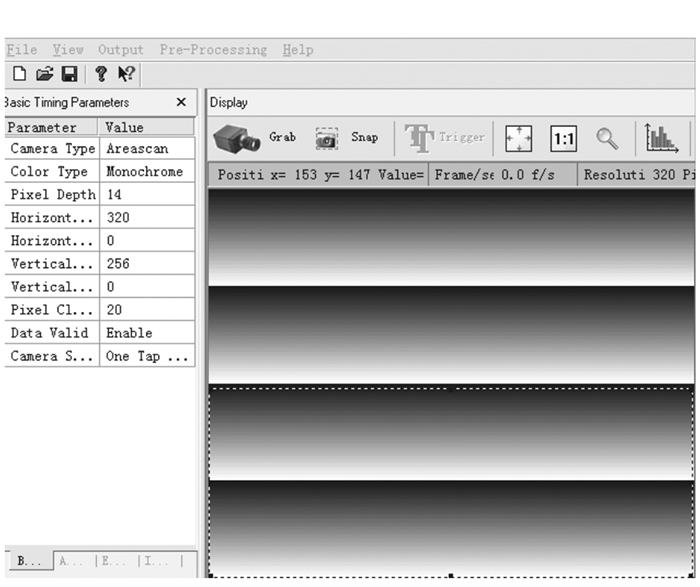
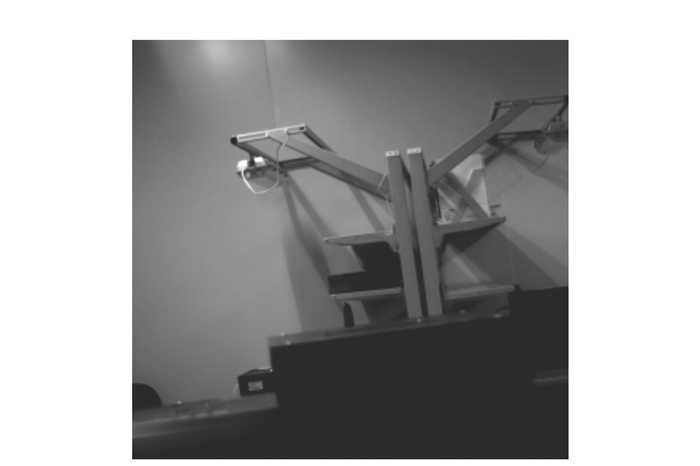
为了提高光电经纬仪上图像传输系统的性能,建立了光纤传输系统,本文针对传统CameraLink光纤传输系统方案中FPGA开发繁琐的问题,结合CameraLink接口协议和串行/解串行技术,设计了一种新的base型CameraLink的光纤传输系统,该系统采用SerDes芯片组MAX9259/MAX9260代替编解码芯片,实现数据在Cameralink并行接口与光电转换模块串行接口之间的相互转化,并通过两种实验方案验证了系统的可行性。该方案省去传统方案中时分复用及异步FIFO缓存,降低了光纤传输系统的开发难度,并缩短了研发周期。实验结果表明:系统传输速率达到2.5 Gb/s,具有传输稳定可靠,传输图像质量好,带宽高,抗电磁干扰能力强等特点,可满足多种像素时钟相机的需求。
为了提高光电经纬仪上图像传输系统的性能,建立了光纤传输系统,本文针对传统CameraLink光纤传输系统方案中FPGA开发繁琐的问题,结合CameraLink接口协议和串行/解串行技术,设计了一种新的base型CameraLink的光纤传输系统,该系统采用SerDes芯片组MAX9259/MAX9260代替编解码芯片,实现数据在Cameralink并行接口与光电转换模块串行接口之间的相互转化,并通过两种实验方案验证了系统的可行性。该方案省去传统方案中时分复用及异步FIFO缓存,降低了光纤传输系统的开发难度,并缩短了研发周期。实验结果表明:系统传输速率达到2.5 Gb/s,具有传输稳定可靠,传输图像质量好,带宽高,抗电磁干扰能力强等特点,可满足多种像素时钟相机的需求。

2018, 11(6): 1024-1031.
doi: 10.3788/CO.20181106.1024
摘要:
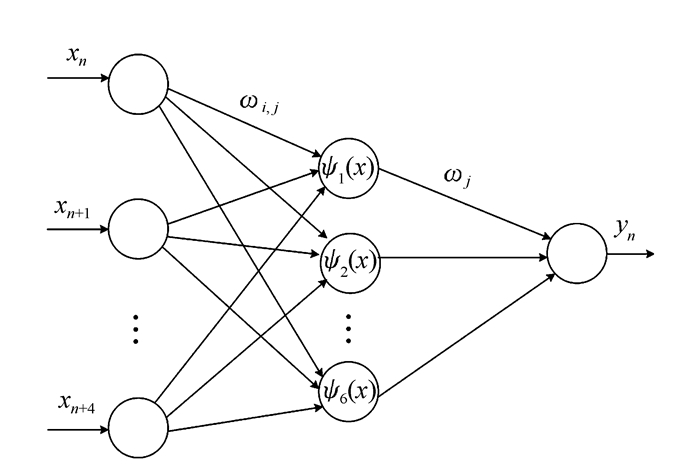
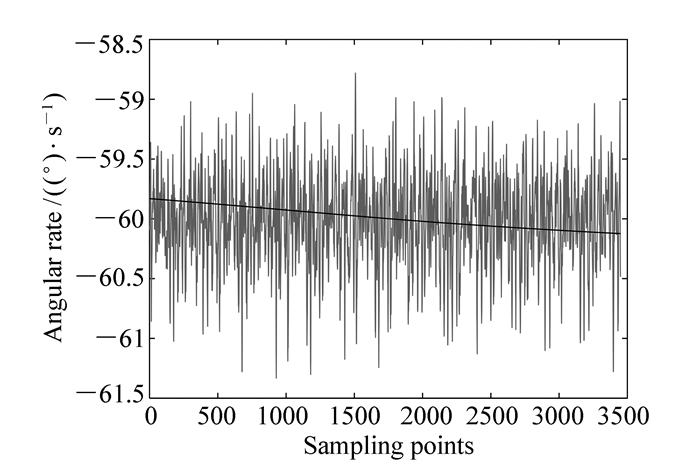
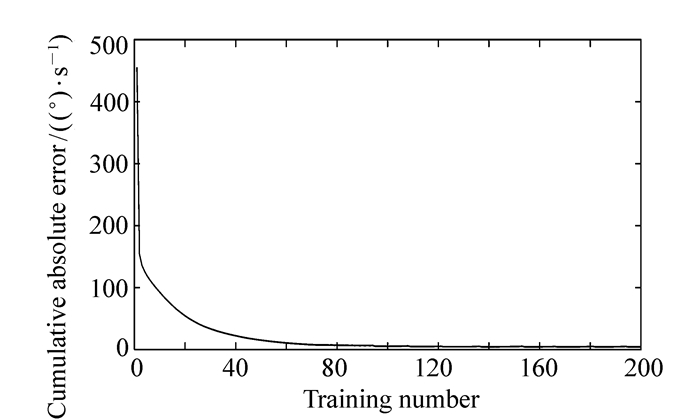
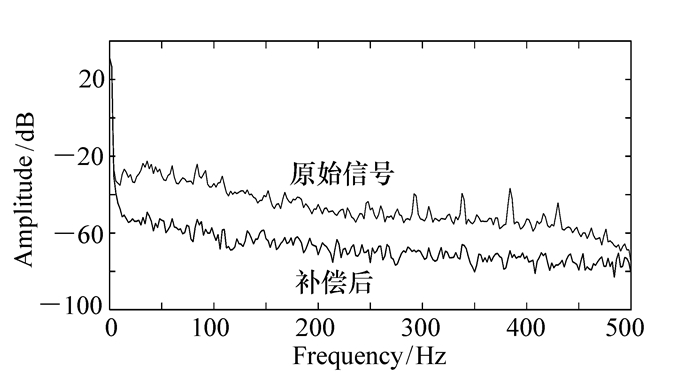
为了提高光纤陀螺的测量精度,提出了一种基于小波神经网络的误差补偿方法。首先使用小波分析中的Mallat分解算法提取出陀螺信号中的主趋势项,对其误差余项进行重构。然后将重构信号作为小波神经网络的目标输出,将原始陀螺信号作为训练样本。为了提高小波神经网络的训练速度同时防止其陷入局部极小值,采用增加动量因子和自适应调整学习速率的方法来改进训练方法。训练后建立的神经网络模型对光纤陀螺误差具有良好的估计能力。结果表明,经过小波神经网络方法补偿后,光纤陀螺的输出精度达到了0.019 4°/s,光纤陀螺的测量性能得到了提高。
为了提高光纤陀螺的测量精度,提出了一种基于小波神经网络的误差补偿方法。首先使用小波分析中的Mallat分解算法提取出陀螺信号中的主趋势项,对其误差余项进行重构。然后将重构信号作为小波神经网络的目标输出,将原始陀螺信号作为训练样本。为了提高小波神经网络的训练速度同时防止其陷入局部极小值,采用增加动量因子和自适应调整学习速率的方法来改进训练方法。训练后建立的神经网络模型对光纤陀螺误差具有良好的估计能力。结果表明,经过小波神经网络方法补偿后,光纤陀螺的输出精度达到了0.019 4°/s,光纤陀螺的测量性能得到了提高。



2018, 11(6): 1032-1046.
doi: 10.3788/CO.20181106.1032
摘要:
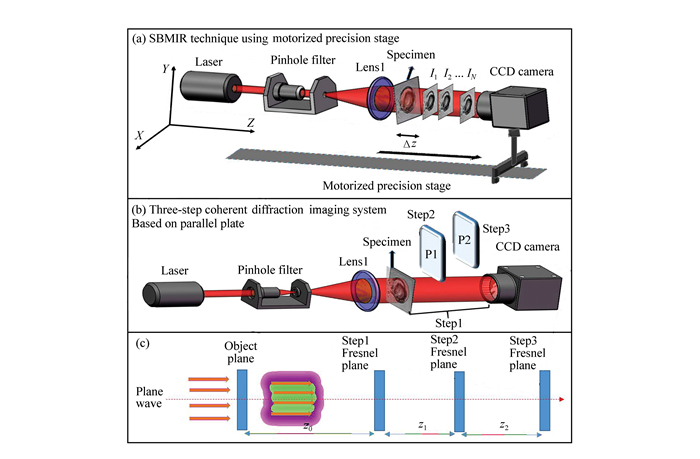
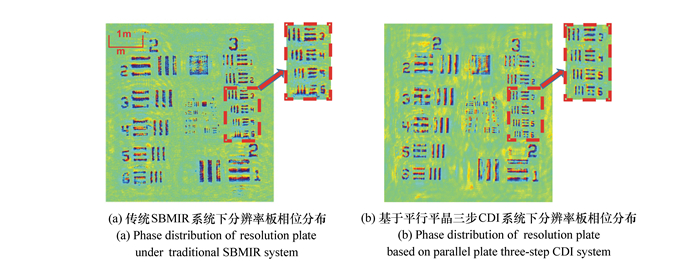
传统单光束多强度重建(SBMIR)系统中,多次平移图像传感器所积累的误差导致光电成像系统的成像效果及有效分辨率降低,为了解决这一问题。本文提出基于平行平晶的三步相干衍射成像系统,采取插入或抽取2块平行平晶的方法获取3个不同的衍射面,实现了对复振幅型物体的成像及恢复重建。数值模拟及实验表明,系统有效克服了SBMIR系统中数次平移的误差积累问题,且仅需记录3个衍射面,避免过采样。而且光学系统实现简便、可重复性高。
传统单光束多强度重建(SBMIR)系统中,多次平移图像传感器所积累的误差导致光电成像系统的成像效果及有效分辨率降低,为了解决这一问题。本文提出基于平行平晶的三步相干衍射成像系统,采取插入或抽取2块平行平晶的方法获取3个不同的衍射面,实现了对复振幅型物体的成像及恢复重建。数值模拟及实验表明,系统有效克服了SBMIR系统中数次平移的误差积累问题,且仅需记录3个衍射面,避免过采样。而且光学系统实现简便、可重复性高。




2018, 11(6): 1047-1060.
doi: 10.3788/CO.20181106.1047
摘要:
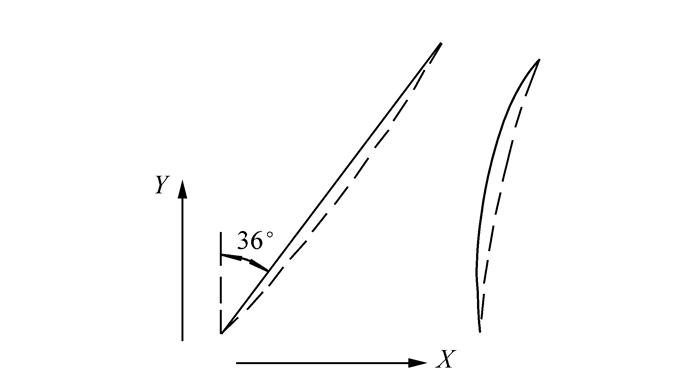
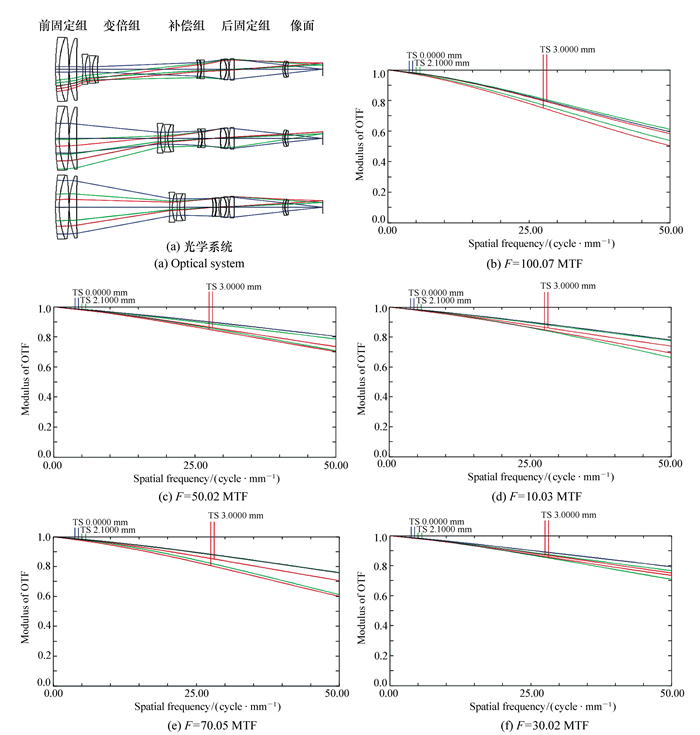
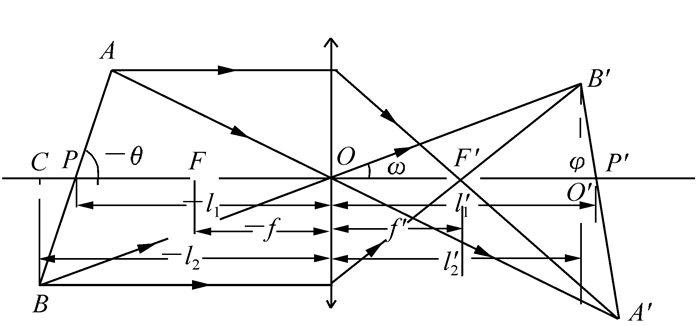
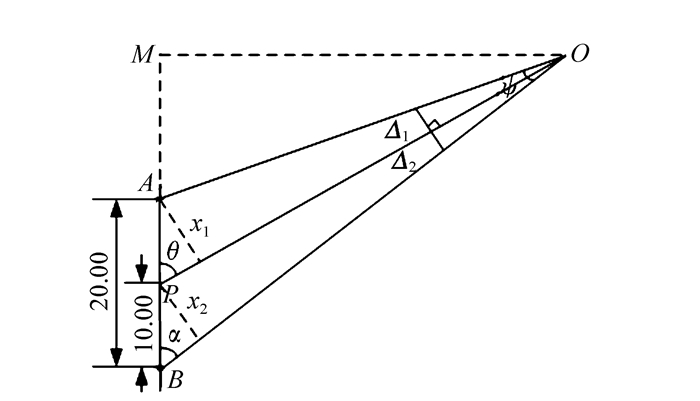
ZEMAX和CODE V等光学设计软件,虽然有很强的优化功能,但如果想得到好的设计结果,初始解的选择至关重要。求初始解的普遍做法是,将已有的光学系统或其中某一个组元拿来进行缩放。这种办法带有盲目性。另一种方法就是利用高斯光学和三级像差理论求变焦距物镜的初始解。这一方法有助于创新设计,但却很少被应用。本文介绍了作者在运用这一方法过程中产生的观点、理念、经验和成果。本文通过一个十倍变焦距物镜设计实例,详细介绍了求初始解的过程,为了验证该初始解的效果,还用ZEMAX进行了像差优化。为了增加说服力,设计过程的每一步,都给出了具体的数据,包括经ZEMAX优化得到的最后结果。
ZEMAX和CODE V等光学设计软件,虽然有很强的优化功能,但如果想得到好的设计结果,初始解的选择至关重要。求初始解的普遍做法是,将已有的光学系统或其中某一个组元拿来进行缩放。这种办法带有盲目性。另一种方法就是利用高斯光学和三级像差理论求变焦距物镜的初始解。这一方法有助于创新设计,但却很少被应用。本文介绍了作者在运用这一方法过程中产生的观点、理念、经验和成果。本文通过一个十倍变焦距物镜设计实例,详细介绍了求初始解的过程,为了验证该初始解的效果,还用ZEMAX进行了像差优化。为了增加说服力,设计过程的每一步,都给出了具体的数据,包括经ZEMAX优化得到的最后结果。