


Find preliminary solution of zoom objective lens using gaussian optics and third-order aberration theory
-
摘要: ZEMAX和CODE V等光学设计软件,虽然有很强的优化功能,但如果想得到好的设计结果,初始解的选择至关重要。求初始解的普遍做法是,将已有的光学系统或其中某一个组元拿来进行缩放。这种办法带有盲目性。另一种方法就是利用高斯光学和三级像差理论求变焦距物镜的初始解。这一方法有助于创新设计,但却很少被应用。本文介绍了作者在运用这一方法过程中产生的观点、理念、经验和成果。本文通过一个十倍变焦距物镜设计实例,详细介绍了求初始解的过程,为了验证该初始解的效果,还用ZEMAX进行了像差优化。为了增加说服力,设计过程的每一步,都给出了具体的数据,包括经ZEMAX优化得到的最后结果。Abstract: Despite the optical design softwares like ZEMAX and CODE V own the strong optimization features, the selection of preliminary solution is still critical if a good design result is expected. A common practice for finding a preliminary solution is to scale an existing optical system or one of its components. However, this approach has a certain blindness. Another method is using the Gaussian optics and the third-order aberration theory to find the initial solution of the zoom objective lens. This approach is helpful to produce innovative ideas in design but is rarely used. The ideas, concept, experiences, and results generated by this approach are introduced in this paper. Through the design example of a ten-fold zoom objective lens, the process of finding the preliminary solution is introduced in detail. In order to verify the initial solution obtained, the aberration optimization is also performed using ZEMAX. For the sake of increasing power of conviction, specific data is given at each step of the design process, including the final results obtained by ZEMAX optimization.
-
Key words:
- zoom /
- Gaussian optics /
- third-order aberration /
- optical design
-

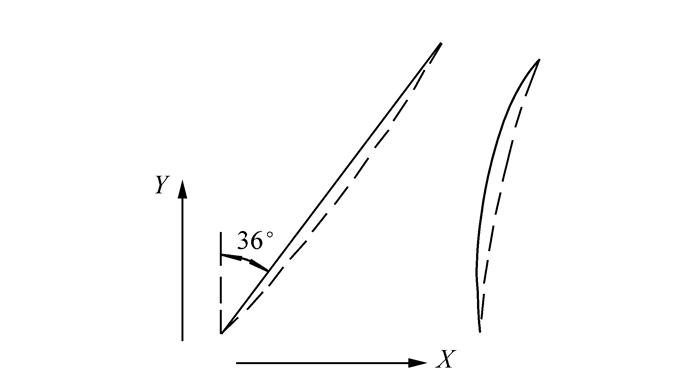
图 2 凸轮曲线展开图。实线代表变倍曲线为直线,其升角36°。虚线代表变倍曲线为双曲线。X为焦距由10变化到100时,变倍组移动方向。Y为焦距由10变化到100的滚筒转动方向
Figure 2. Unfold curves of the cam. The solid lines express the variable curves in shape of strait line with rise angle of 36°. The dotted lines express the variable curves in shape of bi-curve. X:The moving direction of the zooming groups from F=10 to F=100. Y:The rotation direction of roller.

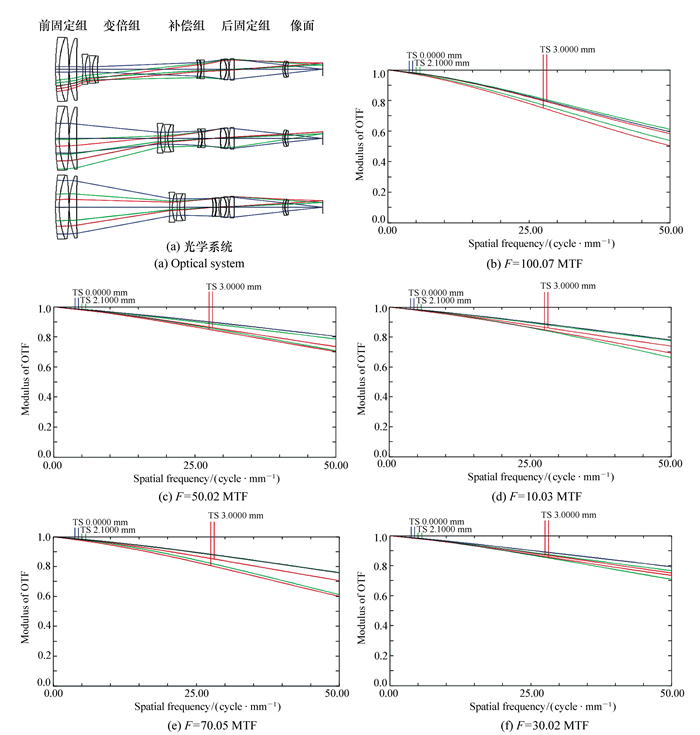
图 3 10×变焦距物镜的光学系统结构和传递函数
Figure 3. Structure and transfer functions of optical system with 10× zooming objective lens
表 1 两移动组件的移动量和各组之间间隔
Table 1. Movements of two move components and interval between components
F X Y D1 D2 D3 D4 100 0 0 41.85 15 4 20 70 -2.579 1 -3.983 0 39.270 9 13.596 2 7.983 0 20 55 -4.850 1 -5.851 2 36.999 9 13.998 9 9.851 2 20 30 -12.547 8 -7.931 1 29.302 2 19.616 7 11.931 1 20 10 -35.599 7 -6.306 9 6.250 3 44.292 8 10.306 9 20  下载: 导出CSV
下载: 导出CSV
表 2 F=100、F=35和F=10各组元相关参数
Table 2. Related parameters of components for F=100, F=35 and F=10
F 前固组 变倍组 补偿组 后固前 后固后 100 u′-u 0.208 3 -0.229 2 -0.120 4 0.266 2 0 h 12.5 3.781 3 4.093 8 4.658 7 2.158 7 hp -9.675 9 -1.671 4 -0.322 0 1.609 9 35 u′-u 0.072 9 -0.125 7 -0.088 4 0.266 2 0 h 4.375 2.075 1 3.065 3 4.658 7 2.158 7 hp -11.702 5 -2.847 -0.9423 0 1.609 9 10 u′-u 0.020 8 -0.067 8 -0.094 2 0.266 2 0 h 1.25 1.119 8 3.203 4.658 7 2.159 7 hp -8.205 7 -5.475 8 -0.829 6 0 1.609 9
下载: 导出CSV
表 3 解方程后得出的各焦距的像差系数
Table 3. Aberration coefficients of zooming groups in each focal length after solving equations
F 100 90 70 55 40 25 15 10 S1 0 0.000 6 0.000 5 0 -0.000 5 -0.000 9 -0.000 7 0 S2 0 -0.000 3 -0.000 3 0 0.000 5 0.000 8 0.000 5 0 S3 0 0 0 0 0 0.000 1 0.000 2 0 S5 -0.025 9 -0.026 4 -0.027 6 -0.028 3 -0.028 6 -0.026 4 -0.015 0.011 3
下载: 导出CSV
表 4 去掉无光焦度组四组元的像差系数
Table 4. Aberration coefficients of the four groups by removing afocal group
F 100 90 70 55 40 25 15 10 S1 0 -0.001 5 -0.001 3 0 0.001 3 0.002 0.001 6 0 S2 0 0.001 4 0.001 5 0 -0.001 8 -0.002 6 -0.001 6 0 S3 0 -0.002 1 -0.005 2 -0.006 1 -0.005 6 -0.003 6 -0.001 5 0
下载: 导出CSV
表 5 采用0点方法时像差的减小量
Table 5. Aberration reduction results using zero-point method
F 100 90 70 55 40 25 15 10 S1 0 -0.001 2 -0.001 0 0 0.001 0 0.001 6 0.001 3 0 S2 0 0.001 2 0.001 3 0 -0.001 5 -0.001 6 -0.001 3 0 S3 0.001 9 0 -0.002 9 -0.003 8 -0.003 5 -0.001 0 0 0.001 2
下载: 导出CSV
表 6 各组元的p∞、w∞和p0值以及结构
Table 6. p∞, w∞, p0 and structure of each component
前固定组 变倍组 补偿组 后固组前 后固组后 p∞=0.210 1 p∞=1.121 2 p∞=-1.865 3 p∞=-0.262 3 p∞=10.811 9 w∞=0.938 8 w∞=1.331 6 w∞=1.802 6 w∞=0.611 2 w∞=1.128 5 p0=-0.319 4 p0=-0.057 3 p0=-4.159 7 p0=-0.446 6 p0=10.011 0 半径 玻璃 半径 玻璃 半径 玻璃 半径 玻璃 半径 玻璃 121.917 5 ZF7 -74.656 9 ZK9 -19.888 4 ZF7 42.750 3 K9 9.622 6 ZK9 42.715 2 K9 22.115 3 -13.023 7 -9.897 5 ZF7 5.6437 -99.809 9 -28.057 7 ZK9 -16.332 4 ZK9 20.121 1 6.874 5 ZK9 51.853 1 LAK2 13.439 9 ZF7 48.494 3 17.668 7 LAK2 13.850 3 411.755 1 50.519 0 141.750 4
下载: 导出CSV
表 7 薄透镜系统像差
Table 7. System aberrations of thin lenses
F 像差类别 S1 S2 S3 S4 S5 C1 C2 100 系数 0.001 55 0.000 479 -0.000 03 -0.001 195 -0.025 84 0 0 初级 0.049 6 0.000 639 -0.002 141 -0.038 24 -0.034 46 0 0 实际 -0.120 3 0.005 158 -0.443 1 0.070 15 -0.038 97 -1.281 6 0.0126 8 高级 -0.169 9 0.004 519 -0.440 9 0.108 4 -0.000 45 -1.281 6 0.0126 8 70 系数 0.002 078 0.000 126 0 -0.001 195 -0.027 54 0 0 初级 0.066 51 0.000 168 0 -0.038 24 -0.036 72 0 0 实际 -0.064 81 0.001 538 -0.365 6 0.047 67 -0.042 19 -0.633 3 0.011 75 高级 -0.131 3 0.001 37 -0.365 6 0.085 91 -0.005 47 -0.633 3 0.011 75 55 系数 0.001 576 0.000 459 -0.000 02 -0.001 195 -0.028 23 0 0 初级 0.050 44 0.000 612 -0.001 35 -0.038 24 -0.037 65 0 0 实际 -0.086 99 0.001 646 -0.318 1 -0.032 96 -0.044 04 -0.548 7 0.010 24 高级 -0.137 4 0.001 034 -0.316 8 0.005 28 -0.006 39 -0.548 7 0.010 24 30 系数 0.000 758 0.001 167 0.000 06 -0.001 195 -0.027 49 0 0 初级 0.024 26 0.001 556 0.003 952 -0.038 24 -0.036 64 0 0 实际 -0.121 8 0.002 586 -0.229 1 0.007 815 -0.045 96 -0.546 0.004 71 高级 -0.146 1 0.001 030 -0.233 1 0.046 55 -0.009 32 -0.546 0.004 71 10 系数 0.001 579 0.0004 33 -0.000 05 -0.001 195 0.010 77 0 0 初级 0.050 5 0.000 578 -0.000 303 -0.038 24 0.014 36 0 0 实际 -0.090 47 0.001 538 -0.166 95 -0.001 345 0.010 15 -0.535 7 -0.007 35 高级 -0.141 0 0.000 96 -0.166 6 0.036 90 -0.004 21 -0.535 7 -0.007 35 注:S2一列中的像差为O.S.C. C1一列中的色差是以波长为单位。
下载: 导出CSV
表 8 初始解(厚透镜系统)的像差
Table 8. Aberrations of initial solution for thick lens system
F 像差类别 S1 S2 S3 S4 S5 C1 C2 100 系数 0.014 13 0.006 108 0.000 206 -0.001 608 -0.022 55 -0.000 607 0.000 61 初级 0.451 8 0.008 146 0.013 16 -0.051 43 -0.030 07 -0.516 5 0.004 876 实际 0.429 1 0.013 126 -0.337 43 0.033 45 -0.034 4 -1.229 3 0.015 02 高级 -0.022 7 0.004 98 -0.350 6 0.085 29 -0.004 24 -0.712 8 0.010 14 70 系数 0.013 94 0.003 955 0.001 099 -0.001 608 -0.023 73 0.000 018 0.000 272 初级 0.446 38 0.005 273 0.070 38 -0.051 43 -0.031 64 0.001 531 0.002 174 实际 0.406 61 0.007 370 -0.217 8 0.013 77 -0.036 53 -0.247 1 0.011 91 高级 -0.039 77 0.002 106 -0.282 2 0.065 17 -0.005 29 -0.248 6 0.009 736 55 系数 0.013 01 0.003 744 0.001 569 -0.001 608 -0.024 09 0.000 242 0.000 088 初级 0.416 0.004 992 0.100 31 -0.051 43 -0.032 13 0.205 9 0.000 70 实际 0.362 2 0.006 843 -0.141 6 0.000 06 -0.037 66 -0.022 8 0.009 27 高级 -0.052 7 0.001 851 -0.241 9 0.051 49 -0.005 53 -0.228 6 0.008 57 30 系数 0.011 66 0.003 849 0.002 441 -0.001 608 -0.022 57 0.002 38 0.000 748 初级 0.373 7 0.005 132 0.156 42 -0.051 43 -0.030 09 2.025 3 0.005 93 实际 0.310 72 0.007 052 -0.004 87 -0.024 12 -0.037 75 1.759 5 0.010 86 高级 -0.062 98 0.001 92 -0.161 29 0.027 31 -0.007 66 -0.265 8 0.004 94 10 系数 0.013 116 0.002 626 0.002 779 -0.001 608 0.016 89 0.000 861 -0.000 455 初级 0.419 42 0.003 502 0.177 9 -0.051 43 0.022 45 0.477 4 -0.003 635 实际 0.360 36 0.005 836 0.063 51 -0.027 65 0.020 61 0.478 8 -0.010 5 高级 -0.059 06 0.002 334 -0.114 4 0.023 78 -0.001 84 0.001 4 -0.006 865
下载: 导出CSV
表 9 初始解结构数据
Table 9. Structure data of initial solution
序号 半径 间隔 玻璃 组元焦距 1 121.912 8 1.5 ZF7 60 2 42.713 6 4 K9 3 -99.806 1 0.1 4 51.851 1 3 LAK2 5 411.739 3 变焦间隔 6 -78.323 4 1 ZBAF1 -16.5 7 23.201 4 2 8 -29.346 0 1 ZK9 9 14.057 0 2 ZF7 10 52.838 7 变焦间隔 11 -19.607 6 1.2 ZF7 -34 12 -12.839 8 1.5 13 -16.101 8 1 ZK9 14 47.809 6 变焦间隔 15 42.797 8 2.5 K9 17.498 3 16 -9.908 4 1 ZF7 17 -20.143 5 0.1 18 17.688 3 2 LAK2 19 141.907 9 20 20 9.622 58 0.7 F4 -315.43 21 5.643 74 0.3 22 6.874 45 1 ZK9 23 11.940 0 变焦间隔 F d5 d10 d14 100 37.972 0 12.045 9 0.871 5 70 35.392 3 10.611 7 4.854 8 55 33.121 9 11.044 8 6.722 7 30 25.423 6 16.632 2 8.802 6 10 2.372 3 41.338 7 7.178 4
下载: 导出CSV
表 10 最终设计结果结构数据
Table 10. Structure data of final design results
序号 半径 间隔 玻璃 口径 组元焦距 1 134.843 4 1.5 ZF7 29.8 60.120 2 2 47.075 39 4 K9 29.38 3 -134.108 2 0.1 29.36 4 47.300 25 3 LAK2 28.76 5 413.596 3 变焦间隔 28.37 6 -66.570 41 1 ZBAF1 13.9 -16.494 9 7 19.972 16 2 12.88 8 -41.840 76 1 ZK9 12.65 9 15.549 69 2 ZF7 12.38 10 54.753 75 变焦间隔 12.18 11 -18.917 59 1.2 ZF7 8.38 -33.879 8 12 -13.284 99 1.5 8.53 13 -15.468 31 1 ZK9 8.52 14 78.311 92 变焦间隔 8.69 15 45.045 39 2.5 K9 8.85 17.527 2 16 -9.877 915 1 ZF7 9.23 17 -18.838 67 0.1 9.76 18 23.768 19 2 LAK2 10.04 19 -199.390 2 20 9.97 20 12.480 83 0.7 F4 7.5 -586.08 21 7.204 519 0.3 7.15 22 10.466 23 1 ZK9 7.15 23 23.432 3 14.383 01 7.04 变焦间隔 F d5 d10 d14 最佳像面 100.07 38.280 17 11.728 7 0.607 73 14.382 02 70.05 35.667 3 10.405 0 4.544 1 14.449 3 55.02 33.406 05 10.778 18 6.431 32 14.382 02 30.02 25.611 9 16.608 6 8.394 9 14.468 3 10.03 2.565 75 41.261 78 6.793 77 14.382 02
下载: 导出CSV
-
[1] 程雪岷, 王光宇, 张丽琴, 等.变焦距镜头初始结构智能化设计方法[J].计算物理, 2002, 19(6):521-526. doi: 10.3969/j.issn.1001-246X.2002.06.010CHENG X M, WANG G Y, ZHANG L Q, et al.. Intelligent computer-aided design of zoom lens layout[J]. Chinese Journal of Computational Physics, 2002, 19(6):521-526.(in Chinese) doi: 10.3969/j.issn.1001-246X.2002.06.010 [2] 史光辉.光学补偿式步进变焦距物镜[J].光学工程, 2009, 36(6):1-3. http://d.old.wanfangdata.com.cn/Periodical/gdgc200906001SHI G H. Optical compensated step zoom lenses[J]. Opto-electronic Engineering, 2009, 36(6):1-3.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gdgc200906001 [3] 史光辉.一次成像折反式步进变焦距物镜[J].光电工程, 2008, 35(11):1-3. doi: 10.3969/j.issn.1003-501X.2008.11.001SHI G H. One imaging catadioptric step zoom lens[J]. Opto-electronic Engineering, 2008, 35(11):1-3.(in Chinese) doi: 10.3969/j.issn.1003-501X.2008.11.001 [4] 史光辉.利用本征色差校正二级光谱[J].光学学报, 1981, 1(5):433-439. doi: 10.3321/j.issn:0253-2239.1981.05.008SHI G H. Correction of secondary spectrum with intrinsic aberrations[J]. Acta Optica Sinica, 1981, 1(5):433-439.(in Chinese) doi: 10.3321/j.issn:0253-2239.1981.05.008 [5] 史光辉.具有两次透射的无光焦度校正透镜组的准施密特系统[J].光学学报, 1998, 18(3):373-375. doi: 10.3321/j.issn:0253-2239.1998.03.026SHI G H. A Pseudo-Schimidt system with through-twice afocal corrective lens[J]. Acta Optica Sinica, 1998, 18(3):373-375.(in Chinese) doi: 10.3321/j.issn:0253-2239.1998.03.026 [6] 电影镜头设计组.电影摄影物镜光学设计[M].中国工业出版社, 1971.Design group of film lens. Optical Design for Film Photographic[M]. Industry Publication House of China, 1971.(in Chinese) [7] 林大健.工程光学设计[M].机械工业出版社, 1987.LIN D J. Optical Design for Engineering[M]. Machine Industry Publication House, 1987.(in Chinese) [8] 史光辉, 李媛媛.求解变焦距物镜象差方程程序[J].仪器仪表学报, 1993, 14(1):76-80. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK000003609187SHI G H, LI Y Y. A program for solving equations of aberration equations of zoom lenses[J]. Chinese Journal of Scientific Instrument, 1993, 14(1):76-80.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK000003609187 [9] 史光辉.求满足C1和P∞、W∞透镜组的初始解程序[J].仪器仪表学报, 1988, 9(4):362-367. http://www.cqvip.com/QK/94550X/198804/89818866495756564852484851.htmlSHI G H. A program for finding the initial solution of the group of lenses with given values of C1 and P∞、W∞[J]. Chinese Journal of Scientific Instrument, 1988, 9(4):362-367.(in Chinese) http://www.cqvip.com/QK/94550X/198804/89818866495756564852484851.html [10] 史光辉.变焦距物镜凸轮曲线形式的选择和修正[J].光学精密机械, 1978(3).SHI G H. Choice and correct for curves of cam of zoom lenses[J]. Opt. Precision Eng., 1978(3).(in Chinese) [11] 王之江.光学设计理论基础[M].北京:科学出版社, 1965.WANG ZH J. Theoretical Basic of Optical Design[M]. Bejing:Scien Press, 1965.(in Chinese) [12] 史光辉, 丁甲民.长焦距大视场折反射系统光学设计[J].光学学报, 1991, 11(7):651-655. doi: 10.3321/j.issn:0253-2239.1991.07.017SHI G H, DING J M. Optical design of catadioptric lenses with long focal length and wide field of view[J]. Acta Optica Sinica, 1991, 11(7):651-655.(in Chihese doi: 10.3321/j.issn:0253-2239.1991.07.017 [13] 史光辉, 杨威.用于图像拼接的电视摄像光学系统[J].中国光学, 2014, 7(4):638-643. http://www.chineseoptics.net.cn/CN/abstract/abstract9188.shtmlSHI G H, YANG W. Optical system used to compose images in television photograph[J]. Chinese Optics, 2014, 7(4):638-643.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9188.shtml [14] 王红, 田铁印.5倍变焦距光学系统小型化设计[J].中国光学, 2014, 7(2):315-319. http://www.chineseoptics.net.cn/CN/abstract/abstract9134.shtmlWANG H, TIAN T Y. Miniature design of 5×zoom optical system[J]. Chinese Optics, 2014, 7(2):315-319.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9134.shtml [15] 田铁印, 王红.长焦距大口径连续变焦距光学系统[J].光学精密工程, 2014, 22(9):2369-2374. http://d.old.wanfangdata.com.cn/Periodical/yygx200705010TIAN T Y, WANG H. Optical zoom system with long focal length and large aperture[J]. Opt. Precision Eng., 2014, 22(9):2369-2374.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/yygx200705010 -

 下载:
下载:


计量
- 文章访问数: 2909
- HTML全文浏览量: 858
- PDF下载量: 310
- 被引次数: 0
