


Stripmap mode synthetic aperture ladar imaging under large random phase errors condition
-
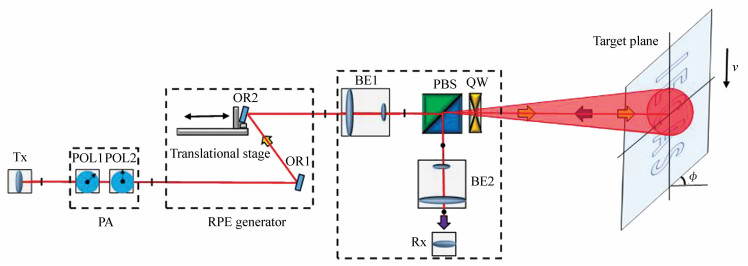
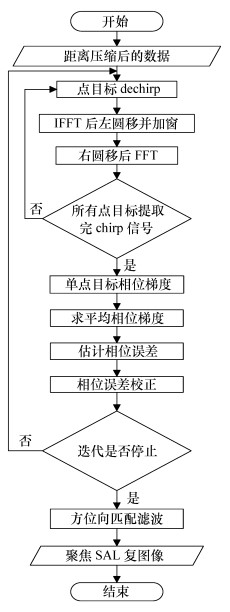
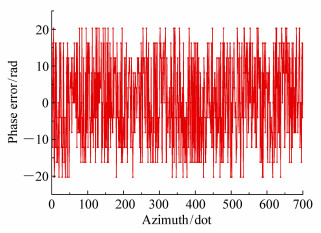
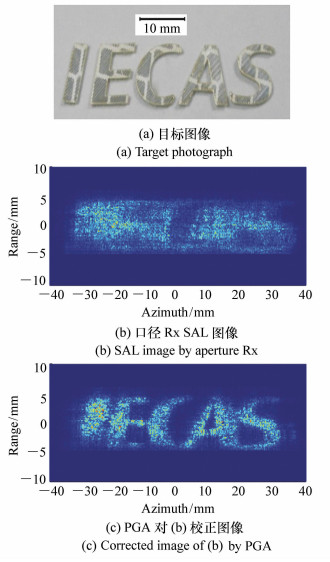
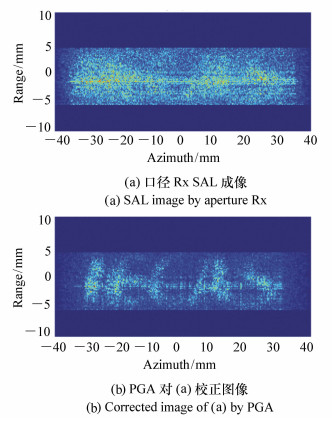
摘要: 为了探索大随机相位误差条件下合成孔径雷达(SAL)成像特点和规律,本文采用波长为1 550 nm的线性调频激光器建立了能够产生大的共模随机相位误差的条带模式SAL成像实验装置。利用此装置获得了不同目标回波强度下条带模式SAL成像实验数据,结合条带模式相位梯度自聚焦(PGA)多次迭代处理,获得了高分辨率SAL图像。实验发现在[-6.45π,6.45π]范围的大随机相位误差下,通过简单的距离压缩和方位匹配滤波,无法实现SAL图像聚焦,图像信噪比仅为3 dB。进一步采用PGA处理,就能很好地校正相位误差,得到聚焦良好的SAL图像,图像信噪比达到43 dB。实验还发现,当存在大共模随机相位误差时,PGA处理展现出非常强的鲁棒性,在回波弱到10-15 W的情况下依然有效。在大相位误差存在的SAL系统(如机载SAL)中,PGA处理能有效消除相位误差,实现图像聚焦;另外,增大探测激光功率以提高成像数据信噪比,将有助于提升PGA处理效果。Abstract: For exploring the characteristics and regularities of SAL imaging under large random phase error conditions, we build the stripmap mode SAL imaging experiment setup by using a 1 550-nm linear chirp laser. By using this device which can generate large common-mode random phase errors, we obtain stripmap mode SAL imaging experimental data under different target echo intensities. Using the phase gradient autofocus(PGA) algorithm of the stripe pattern, we complete the process with multiple iterations to obtain a high-resolution SAL image. When large random phase error exists in the range of[-6.45π, 6.45π], the SAL image cannot be focused by simple distance compression or azimuth matched filtering, and the signal to noise ratio(SNR) of the image can only be 3 dB. By PGA processing, the phase error can be significantly lessened, and a well-focused SAL image with SNR of 43 dB can be obtained. Experiments also show that PGA processing is robust in the presence of common-mode random phase error and the process continues to be valid when echo is as weak as 10-15 W. It can be concluded that in SAL systems that include large random phase errors(such as airborne SAL), PGA processing can effectively eliminate phase error and achieve sharper image focusing. In addition, increasing the detection laser power to increase the SNR of an image will strengthen effective PGA processing.
-
表 1 SAL实验参数
Table 1. Parameters of SAL experiment
Parameters Values Carrier wavelength(λ0) 1 550 nm Wavelength scanning speed 100 nm/s Transmitting beam divergence angle 3.0 mrad Target distance(I0) 1.85 m Pulse length(τpul) 100 ms Side-looking angle(ϕ) 45° Random error(ΔL0) [-2.5 μm, 2.5 μm] Imaging mode stripmap  下载: 导出CSV
下载: 导出CSV
-
[1] BASHKANSKY M, LUCKE R L, FUNK E, et al.. Two-dimensional synthetic aperture imaging in the optical domain[J]. Optics Letters, 2002, 27(22):1983-1985. doi: 10.1364/OL.27.001983 [2] BECK S M, BUCK J R, BUELL W F, et al.. Synthetic-aperture imaging laser radar:laboratory demonstration and signal processing[J]. Applied Optics, 2005, 44(35):7621-7629. doi: 10.1364/AO.44.007621 [3] KRAUSE B W, BUCK J, RYAN C, et al.. Synthetic aperture ladar flight demonstration[C]. Proceedings of Conference on Lasers and Electro-Optics, Baltimore, U.S.America: CLEO, 2011. [4] CROUCH S, BARBER Z W. Laboratory demonstrations of interferometric and spotlight synthetic aperture ladar techniques[J]. Optics Express, 2012, 20(22):24237-24246. doi: 10.1364/OE.20.024237 [5] ZHAO ZH L, WU J, SU Y Y, et al.. Three-dimensional imaging interferometric synthetic aperture ladar[J]. Chinese Optics Letters, 2014, 12(9):091101. doi: 10.3788/COL [6] 吴谨, 赵志龙, 吴曙东, 等.12.9 m高分辨率合成孔径激光雷达成像[J].光学学报, 2015, 35(12):1228002.WU J, ZHAO ZH L, WU SH D, et al.. High resolution synthetic aperture ladar imaging at 12.9 m distance[J]. Acta Optica Sinica, 2015, 35(12):1228002.(in Chinese) [7] TRAHAN R, NEMATI B, ZHOU H, et al.. Low-CNR inverse synthetic aperture LADAR imaging demonstration with atmospheric turbulence[J]. SPIE, 2016, 9846:98460E. [8] TURBIDE S, MARCHESE L, BERGERON A, et al.. Synthetic aperture ladar based on a MOPAW laser[J]. SPIE, 2016, 10005:1000502. [9] LI G Z, WANG N, WANG R, et al.. Imaging method for airborne SAL data[J]. Electronics Letters, 2017, 53(5):351-352. doi: 10.1049/el.2016.4205 [10] 卢智勇, 周煜, 孙建锋, 等.机载直视合成孔径激光成像雷达外场及飞行实验[J].中国激光, 2017, 44(1):0110001. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20172017030600036096LU ZH Y, ZHOU Y, SUN J F, et al.. Airborne down-looking synthetic aperture imaging ladar field experiment and its flight testing[J]. Chinese Journal of Lasers, 2017, 44(1):0110001.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20172017030600036096 [11] 张珂殊, 潘洁, 王然, 等.大幅宽激光合成孔径雷达成像技术研究[J].雷达学报, 2017, 6(1):1-10. http://d.old.wanfangdata.com.cn/Periodical/ldxb201701001ZHANG K SH, PAN J, WANG R, et al.. Study of wide swath synthetic aperture ladar imaging techology[J]. Journal of Radars, 2017, 6(1):1-10.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/ldxb201701001 [12] 赵志龙, 吴谨, 王海涛, 等.微弱回波条件下差分合成孔径激光雷达成像实验演示[J].光学精密工程, 2018, 26(2):276-283. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201802004ZHAO ZH L, WU J, WANG H T, et al.. Experimental demonstration of differential synthetic aperture ladar imaging at very low return level[J]. Opt. Precision Eng., 2018, 26(2):276-283.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201802004 [13] 周峰.机载SAR运动补偿和窄带干扰抑制及其单通道GMTI的研究[D].西安: 西安电子科技大学, 2007.ZHOU F. Study of motion compensation, narrow band interference suppression and single channel GMTI of airborne SAR[D]. Xi'an: Xidian University, 2007.(in Chinese) [14] 徐显文, 洪光烈, 凌元, 等.合成孔径激光雷达振动相位误差的模拟探测[J].光学学报, 2011, 31(5):112-118. http://www.opticsjournal.net/Abstract.htm?id=OJ110428000120mSoVrXXU X W, HONG G L, LING Y, et al.. Simulative detection of vibration phase error of synthetic aperture lidar[J]. Acta Optica Sinica, 2011, 31(5):112-118.(in Chinese) http://www.opticsjournal.net/Abstract.htm?id=OJ110428000120mSoVrX [15] 吴谨.合成孔径激光雷达成像之匹配滤波器[J].光学学报, 2010, 30(7):2123-2129. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201001438233WU J. Matched filter in synthetic aperture ladar imaging[J]. Acta Optica Sinica, 2010, 30(7):2123-2129.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201001438233 [16] LUCKE R L. Synthetic aperture ladar simulations with phase screens and Fourier propagation[C]. Proceedings of 2004 IEEE Aerospace Conference, Montana, U.S.America, 2004: 1788-1798. [17] WU J, LI F F, ZHAO ZH L, et al.. Demonstration of stripmap mode synthetic aperture ladar with PGA-independent high resolution images[J]. Infrared and Laser Engineering, 2014, 43(11):3559-3564. [18] 孟大地, 丁赤飚.一种用于条带式SAR的自聚焦算法[J].电子与信息学报, 2005, 27(9):1349-1352. http://d.old.wanfangdata.com.cn/Periodical/dzkxxk200509002MENG D D, DING CH B. A new approach to autofocus considering strip map SAR[J]. Journal of Electronics & Information Technology, 2005, 27(9):1349-1352.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/dzkxxk200509002 [19] STAPPAERTS E A, SCHARLEMANN E T. Differential synthetic aperture ladar[J]. Optics Letters, 2005, 30(18):2385-2387. doi: 10.1364/OL.30.002385 -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 3375
- HTML全文浏览量: 1506
- PDF下载量: 195
- 被引次数: 0
