


-
摘要: 空间引力波探测中为实现引力波信号科学测量,卫星发射到预定轨道后需首先完成百万公里级激光链路的构建。同时为保证引力波信号不会被激光指向噪声淹没,激光指向稳定性需达到nrad/
-
Key words:
- Taiji program /
- gravitational wave /
- laser acquisition /
- fine pointing
-

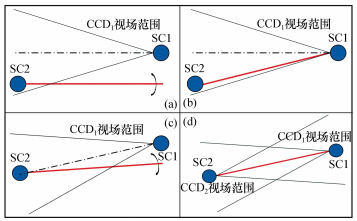
图 2 CCD激光信号捕获方案示意图(a); SC2激光扫描(b); SC1接收到来自SC2激光(c); SC1视线对准SC2;(d)SC2视线对准SC1
Figure 2. CCD laser acquisition scheme (a)SC2 laser scanning; (b)SC1 captures the laser from SC2; (c)SC1 points to SC2; (d)SC2 points to SC1

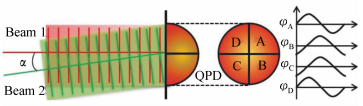
图 5 DWS测角原理图。其中Beam 1为本地激光,Beam 2为传播激光,α为光束夹角
Figure 5. Schematic diagram of angle-measuring principle for DWS. Beam 1 represents the local beam, Beam 2 represents the propagating beam and α represents the included angle

图 6 两光束均入射到QPD中心时由DWS技术引入的角度测量误差与入射光束偏角关系图
Figure 6. Relationship between the measurement error induced by the DWS and angular offset when both beams vertically enter the QPD center
表 1 矫正过程不确定区域的误差预算
Table 1. Error budget of uncertain areas in correction process
误差项 平面内误差/μrad 平面外误差/μrad STR与卫星矫正误差 50 50 望远镜与卫星矫正误差 50 50 望远镜与望远镜指向驱动器矫正误差 25 25 望远镜指向驱动器绝对位置误差 0.5 0 飞船姿态的长期项漂移 30 30 望远镜平面内指向角相对飞船的长期项漂移 0.01 0 总计(线性和) 155.5 155  下载: 导出CSV
下载: 导出CSV
表 2 CCD捕获过程不确定区域的误差预算
Table 2. Error budget of uncertain area in CCD acquisition process
误差项 误差值/μrad 导航误差 11.9 望远镜视线矫正残余误差 5 视线与输出光束角度误差 1 卫星姿态长期项漂移 5 望远镜平面内指向角相对飞船的长期项漂移 1 总计(线性和) 23.9
下载: 导出CSV
表 3 QPD捕获过程不确定区域的误差预算
Table 3. Error budget of uncertain area in QPD acquisition process
误差项 误差值/μrad CCD捕获精度 0.04 卫星姿态与望远镜平面内指向角短期项抖动 0.1 QPD与CCD位置矫正偏差 1 总计(线性和) 1.14
下载: 导出CSV
表 4 太极计划各级指向探测器要求
Table 4. Performance requirements of point sensors at various levels in Taiji program
STR CCD QPD 视场 0.35 rad 200 μrad 1.5 μrad 精度 5 μrad (RMS 3σ) 40 nrad (RMS 3σ) 10 nrad/  下载: 导出CSV
下载: 导出CSV
-
[1] HU W R, WU Y L. The Taiji program in space for gravitational wave physics and the nature of gravity[J]. National Science Review, 2017, 4(5):685-686. doi: 10.1093/nsr/nwx116 [2] JIN G. Program in space detection of gravitational wave in Chinese Academy of Sciences[J]. Journal of Physics:Conference Series, 2017, 840(1):012009. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=IOP_9343271 [3] 罗子人, 白姗, 边星, 等.空间激光干涉引力波探测[J].力学进展, 2013, 43(4):415-447. http://d.old.wanfangdata.com.cn/Periodical/twxjz201501004LUO Z R, BAI SH, BIAN X, et al.. Gravitational wave detection by space laser interferometry[J]. Advances in Mechanics, 2013, 43(4):415-447.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/twxjz201501004 [4] 黄双林, 龚雪飞, 徐鹏, 等.空间引力波探测——天文学的一个新窗口[J].中国科学:物理学力学天文学, 2017, 47(1):010404. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkx-cg201701004HUANG SH L, GONG X F, XU P, et al.. Gravitational wave detection in space—a new window in astronomy[J]. Scientia Sinica Physica, Mechanica & Astronomica, 2017, 47(1):010404.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkx-cg201701004 [5] CIRILLO F, GATH P F. Control system design for the constellation acquisition phase of the LISA mission[J]. Journal of Physics:Conference Series, 2009, 154(1):012014. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000000588624 [6] CIRILLO F. Controller design for the acquisition phase of the LISA mission using a Kalman filter[D]. Pisa: Universitàdi Pisa, 2007. [7] HYDE T T, MAGHAMI P G, MERKOWITZ S M. Pointing acquisition and performance for the laser interferometry space antenna mission[J]. Classical and Quantum Gravity, 2004, 21(5):S635-S640. doi: 10.1088/0264-9381/21/5/036 [8] JONO T, TOYODA M, NAKAGAWA K, et al.. Acquisition, tracking and pointing systems of OICETS for free space laser communications[J]. Proceedings of SPIE, 1999, 3692:41-50. doi: 10.1117/12.352886 [9] LUO Z R, WANG Q L, MAHRDT C, et al.. Possible alternative acquisition scheme for the gravity recovery and climate experiment follow-on-type mission[J]. Applied Optics, 2017, 56(5):1495-1500. doi: 10.1364/AO.56.001495 [10] WUCHENICH D M R, MAHRDT C, SHEARD B S, et al.. Laser link acquisition demonstration for the GRACE Follow-on mission[J]. Optics Express, 2014, 22(9):11351-11366. doi: 10.1364/OE.22.011351 [11] HECHENBLAIKNER G. Measurement of the absolute wavefront curvature radius in a heterodyne interferometer[J]. Journal of the Optical Society of America A, 2010, 27(9):2078-2083. doi: 10.1364/JOSAA.27.002078 [12] SHEARD B S, HEINZEL G, DANZMANN K, et al.. Intersatellite laser ranging instrument for the GRACE Follow-on mission[J]. Journal of Geodesy, 2012, 86(12):1083-1095. doi: 10.1007/s00190-012-0566-3 [13] 董玉辉.面向空间激光干涉引力波探测的精密指向和弱光锁相控制技术的研究[D].北京: 中国科学院大学, 2015.DONG Y H. Intersatellite interferometry: fine pointing and weak-light phase locking techniques for space gravitational wave observatory[D]. Beijing: University of Chinese Academy of Sciences, 2015.(in Chinese) [14] 梁斌, 朱海龙, 张涛, 等.星敏感器技术研究现状及发展趋势[J].中国光学, 2016, 9(1):16-29. http://www.chineseoptics.net.cn/CN/abstract/abstract9384.shtmlLIANG B, ZHU H L, ZHANG T, et al.. Research status and development tendency of star tracker technique[J]. Chinese Optics, 2016, 9(1):16-29.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9384.shtml [15] HYDE T T, MAGHAMIP G. Precision pointing for the laser interferometry space antenna mission[J]. Journal of the Astronautical Sciences, 2003, 113:497-508. http://cn.bing.com/academic/profile?id=12ddf90c1de61edfbd9be7f75d5d2d74&encoded=0&v=paper_preview&mkt=zh-cn -

 下载:
下载:



计量
- 文章访问数: 4063
- HTML全文浏览量: 1516
- PDF下载量: 410
- 被引次数: 0
