2019年 12卷 第3期
2019, 12(3): 425-431.
doi: 10.3788/CO.20191203.0425
 摘要
摘要 HTML全文
HTML全文 PDF 1944KB
PDF 1944KB
摘要:
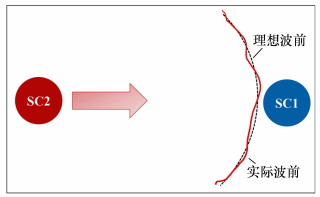
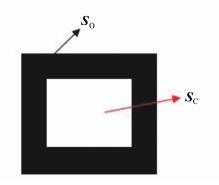
空间引力波探测中为实现引力波信号科学测量,卫星发射到预定轨道后需首先完成百万公里级激光链路的构建。同时为保证引力波信号不会被激光指向噪声淹没,激光指向稳定性需达到nrad/
空间引力波探测中为实现引力波信号科学测量,卫星发射到预定轨道后需首先完成百万公里级激光链路的构建。同时为保证引力波信号不会被激光指向噪声淹没,激光指向稳定性需达到nrad/


2019, 12(3): 432-440.
doi: 10.3788/CO.20191203.0432
摘要:
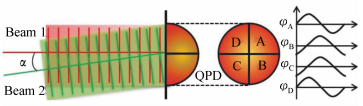
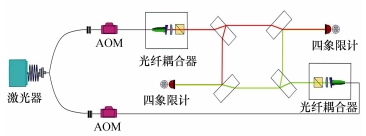
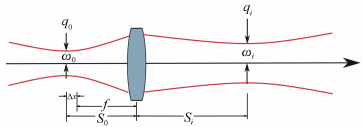
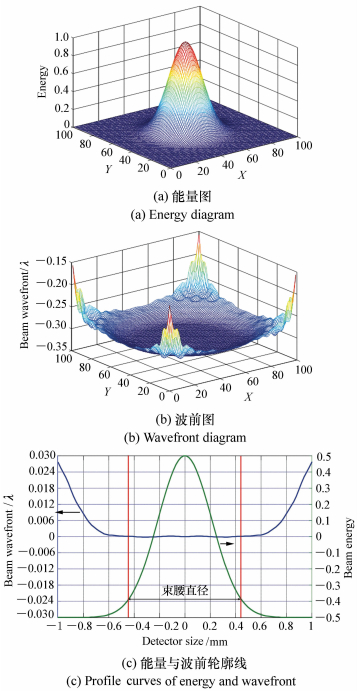
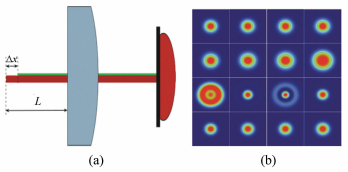
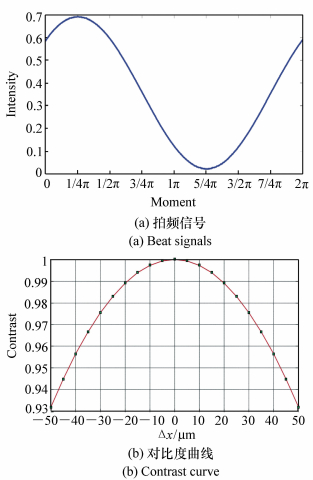
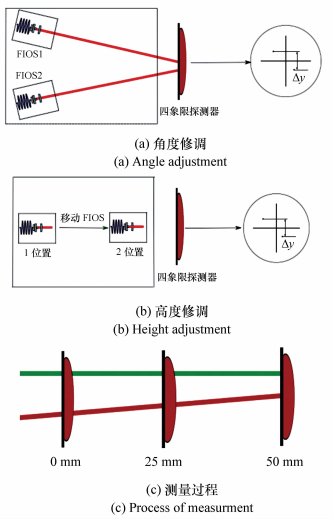
本文提出了一种全玻璃材料的光纤耦合器以实现高精度,高稳定的干涉测量。首先,介绍了干涉测量系统的工作原理以及光纤耦合器的系统设计,然后通过理论分析选取了非球面透镜,并根据具体的透镜参数进行了数值分析以及软件分析。接着进行了光束参数匹配度以及光束矢量匹配度的容差分析以及结构的热分析。最后结合理论分析以及精密的装调手段完成了光纤耦合器的制作。实验结果表明:光斑尺寸相对于仿真结果的误差约为3.4%,两光斑尺寸差异为0.9%,偏心距离低于40 μm,夹角约为60 μrad,基本满足干涉测量系统的使用要求。
本文提出了一种全玻璃材料的光纤耦合器以实现高精度,高稳定的干涉测量。首先,介绍了干涉测量系统的工作原理以及光纤耦合器的系统设计,然后通过理论分析选取了非球面透镜,并根据具体的透镜参数进行了数值分析以及软件分析。接着进行了光束参数匹配度以及光束矢量匹配度的容差分析以及结构的热分析。最后结合理论分析以及精密的装调手段完成了光纤耦合器的制作。实验结果表明:光斑尺寸相对于仿真结果的误差约为3.4%,两光斑尺寸差异为0.9%,偏心距离低于40 μm,夹角约为60 μrad,基本满足干涉测量系统的使用要求。





2019, 12(3): 441-454.
doi: 10.3788/CO.20191203.0441
摘要:
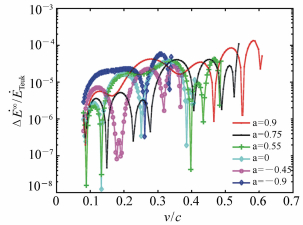
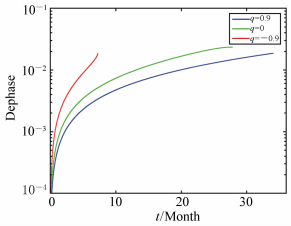
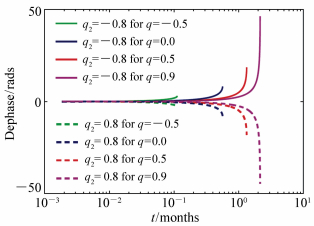
针对空间引力波探测器的数据处理,需高精度高效率计算极端质量比旋进系统引力波,本文提出了一个完全重校准波形计算模型。该模型基于高精度Teukolsky方程数值求解的数据,对等效单体问题的因子化波形中所有与质量比无关的系数进行重校准,并利用重校准后的系数实现波形的高效计算(相同计算环境下效率是Teukolsky方程数值求解的1 400倍)。其精度高于已有的校准模型精度至少一个量级,可满足空间引力波探测器对于无轨道倾角准圆轨道EMRI波形的精度要求。文中还研究了致密天体的自旋以及旋进系统的质量比引起的相位偏移,发现在波形计算中自旋和质量比均不可忽略。利用该模型对极端质量比旋进系统的波形实现高精度、高效率计算对于今后的空间引力波探测器波形模版构建将发挥重大作用。
针对空间引力波探测器的数据处理,需高精度高效率计算极端质量比旋进系统引力波,本文提出了一个完全重校准波形计算模型。该模型基于高精度Teukolsky方程数值求解的数据,对等效单体问题的因子化波形中所有与质量比无关的系数进行重校准,并利用重校准后的系数实现波形的高效计算(相同计算环境下效率是Teukolsky方程数值求解的1 400倍)。其精度高于已有的校准模型精度至少一个量级,可满足空间引力波探测器对于无轨道倾角准圆轨道EMRI波形的精度要求。文中还研究了致密天体的自旋以及旋进系统的质量比引起的相位偏移,发现在波形计算中自旋和质量比均不可忽略。利用该模型对极端质量比旋进系统的波形实现高精度、高效率计算对于今后的空间引力波探测器波形模版构建将发挥重大作用。



2019, 12(3): 455-462.
doi: 10.3788/CO.20191203.0455
摘要:
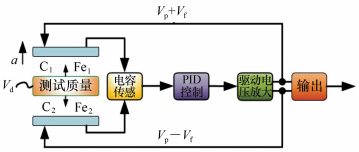
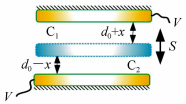
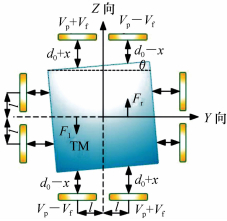
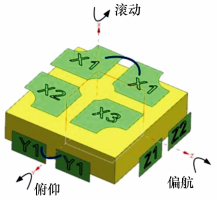
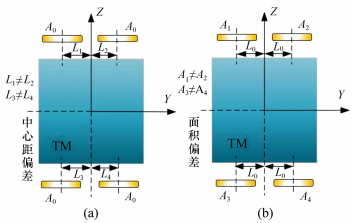
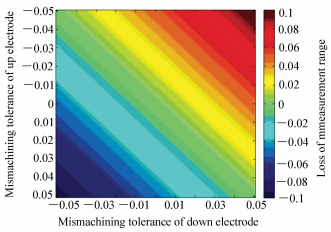
惯性传感器被广泛应用于地球重力场反演、等效原理验证等科学实验中,用来测量空间非保守力作用引起的微小加速度扰动以实现航天器的无拖曳控制。目前国内外正在大力开展的空间引力波探测计划中,惯性传感器作为核心测量载荷主要用于屏蔽外界噪声扰动,并通过静电控制和微推进器的测量及补偿实现测试质量在空间敏感轴方向自由漂浮运动。本文以静电悬浮式惯性传感器电容结构为基础,结合系统静电力驱动控制的工作原理,并以实际的加工条件为依据,对电极不对称性这一系统自身的误差来源展开分析,通过对各种不对称情况的系统性能影响比较分析,得到电极不对称性对于系统性能,特别是量程损失的影响显著。在此基础上结合实际加工条件得出将加工线度尺寸误差控制在10 μm以内,面积不对称性控制在1%~2%之间的基本要求,以降低其对系统测量范围的限制,进而提高科学目标。
惯性传感器被广泛应用于地球重力场反演、等效原理验证等科学实验中,用来测量空间非保守力作用引起的微小加速度扰动以实现航天器的无拖曳控制。目前国内外正在大力开展的空间引力波探测计划中,惯性传感器作为核心测量载荷主要用于屏蔽外界噪声扰动,并通过静电控制和微推进器的测量及补偿实现测试质量在空间敏感轴方向自由漂浮运动。本文以静电悬浮式惯性传感器电容结构为基础,结合系统静电力驱动控制的工作原理,并以实际的加工条件为依据,对电极不对称性这一系统自身的误差来源展开分析,通过对各种不对称情况的系统性能影响比较分析,得到电极不对称性对于系统性能,特别是量程损失的影响显著。在此基础上结合实际加工条件得出将加工线度尺寸误差控制在10 μm以内,面积不对称性控制在1%~2%之间的基本要求,以降低其对系统测量范围的限制,进而提高科学目标。



2019, 12(3): 463-476.
doi: 10.3788/CO.20191203.0463
摘要:
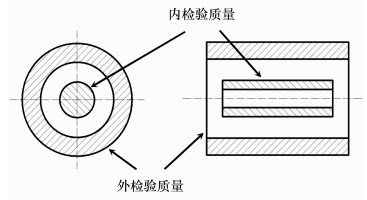
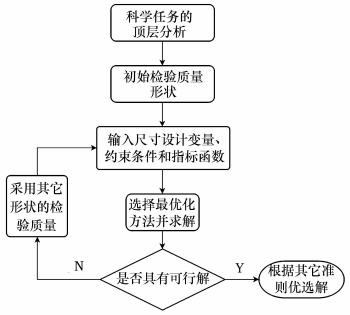
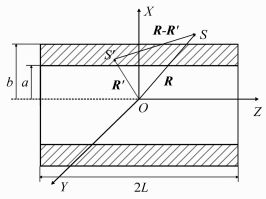
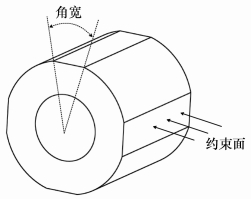
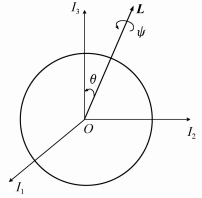
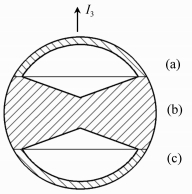
检验质量是无拖曳航天器的惯性参考基准,对检验质量进行结构优化设计、材料选择以及不同配置方案的分析比较,能够为今后无拖曳航天任务中引力参考敏感器的模块化设计提供参考。本文首先分析了检验质量形状的取决要素和设计准则,以空间等效原理检验实验中圆柱体检验质量为例,建立了点质量引力源对检验质量的引力耦合模型,推导了检验质量形状尺寸的优化设计过程,并针对检验质量约束作用面和主惯性矩的特殊考量,分析了其对形状尺寸设计的影响。然后从最大化科学测量信号强度和最小化噪声扰动两方面对检验质量的材料进行选择,得到低磁化率、高密度、低热膨胀系数等属性的材料作为检验质量的备选。最后以空间引力波探测实验为例,从加速度噪声性能指标、方案继承性和技术成熟度、无拖曳控制复杂度等方面对检验质量的不同配置方案进行权衡取舍和比较研究。
检验质量是无拖曳航天器的惯性参考基准,对检验质量进行结构优化设计、材料选择以及不同配置方案的分析比较,能够为今后无拖曳航天任务中引力参考敏感器的模块化设计提供参考。本文首先分析了检验质量形状的取决要素和设计准则,以空间等效原理检验实验中圆柱体检验质量为例,建立了点质量引力源对检验质量的引力耦合模型,推导了检验质量形状尺寸的优化设计过程,并针对检验质量约束作用面和主惯性矩的特殊考量,分析了其对形状尺寸设计的影响。然后从最大化科学测量信号强度和最小化噪声扰动两方面对检验质量的材料进行选择,得到低磁化率、高密度、低热膨胀系数等属性的材料作为检验质量的备选。最后以空间引力波探测实验为例,从加速度噪声性能指标、方案继承性和技术成熟度、无拖曳控制复杂度等方面对检验质量的不同配置方案进行权衡取舍和比较研究。

2019, 12(3): 477-485.
doi: 10.3788/CO.20191203.0477
摘要:
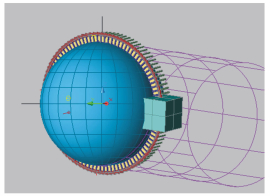
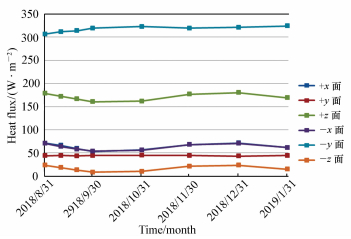
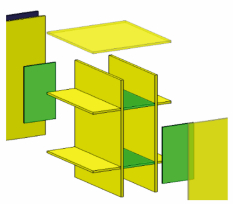
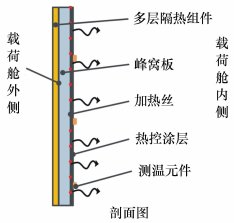
地面引力波探测由于受到地表振动、重力梯度等噪声以及试验尺度的限制,探测频段被限制在10Hz以上,而对于更大特征质量和尺度的波源,探测频段主要在中低频段(0.1 mHz~1 Hz)。因此,为避免地面干扰,需要在空间进行探测。由于引力波信号微弱,探测精度极高,针对空间引力波探测,国际上提出了以LISA为代表的空间引力波探测计划,国内中国科学院也提出了太极计划。然而,国内外的引力波探测卫星计划,对卫星的技术指标、设计复杂性和成本均提出了极高要求,短期之内难以实现。针对这一现实情况,本文参考LISA pathfinder的设计思路,设计一颗近地低成本商业卫星,针对引力波探测关键技术的验证需求,进行卫星任务需求分析及结构、热控、姿态控制等关键技术分析,提出商业化的低成本技术验证初步设想,希望能对空间引力波探测卫星总体设计提供一定借鉴。
地面引力波探测由于受到地表振动、重力梯度等噪声以及试验尺度的限制,探测频段被限制在10Hz以上,而对于更大特征质量和尺度的波源,探测频段主要在中低频段(0.1 mHz~1 Hz)。因此,为避免地面干扰,需要在空间进行探测。由于引力波信号微弱,探测精度极高,针对空间引力波探测,国际上提出了以LISA为代表的空间引力波探测计划,国内中国科学院也提出了太极计划。然而,国内外的引力波探测卫星计划,对卫星的技术指标、设计复杂性和成本均提出了极高要求,短期之内难以实现。针对这一现实情况,本文参考LISA pathfinder的设计思路,设计一颗近地低成本商业卫星,针对引力波探测关键技术的验证需求,进行卫星任务需求分析及结构、热控、姿态控制等关键技术分析,提出商业化的低成本技术验证初步设想,希望能对空间引力波探测卫星总体设计提供一定借鉴。



2019, 12(3): 486-492.
doi: 10.3788/CO.20191203.0486
摘要:
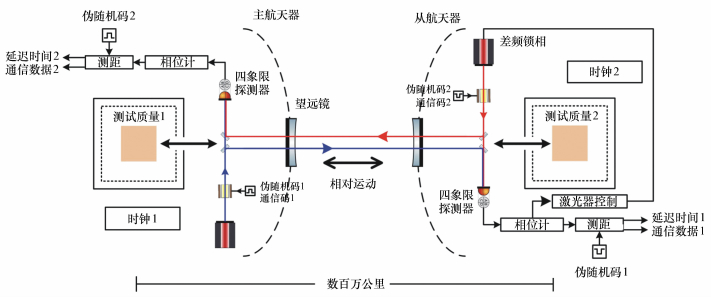
空间引力波探测任务中,由于干涉臂臂长的巨大差异,激光频率不稳定噪声成为系统最大的噪声源之一。需采用Pound-Drever-Hall锁腔、锁臂和TDI(Time Delay Interferometer)技术三级联合,将此噪声压制到10-6 Hz1/2量级,才能使得频率噪声低于散粒噪声。而实现TDI技术需要准确测量卫星间的绝对距离和星间通信。本文以空间引力波探测中的绝对距离测量和通信技术为背景,详细阐述此项技术的实现原理和方法。拟通过EOM(Electro-Optic Modulator)将测距伪随机码和通信码调制至主激光相位中,再传输至远端航天器。在远端航天器通过锁相环和延迟环组成的解调系统计算伪随机码的时间延迟,进而解析出卫星间的绝对距离和通信信息。相关结论可为未来的验证实验奠定理论和技术基础,同时为我国未来空间引力波探测的相关技术发展提供一定参考。
空间引力波探测任务中,由于干涉臂臂长的巨大差异,激光频率不稳定噪声成为系统最大的噪声源之一。需采用Pound-Drever-Hall锁腔、锁臂和TDI(Time Delay Interferometer)技术三级联合,将此噪声压制到10-6 Hz1/2量级,才能使得频率噪声低于散粒噪声。而实现TDI技术需要准确测量卫星间的绝对距离和星间通信。本文以空间引力波探测中的绝对距离测量和通信技术为背景,详细阐述此项技术的实现原理和方法。拟通过EOM(Electro-Optic Modulator)将测距伪随机码和通信码调制至主激光相位中,再传输至远端航天器。在远端航天器通过锁相环和延迟环组成的解调系统计算伪随机码的时间延迟,进而解析出卫星间的绝对距离和通信信息。相关结论可为未来的验证实验奠定理论和技术基础,同时为我国未来空间引力波探测的相关技术发展提供一定参考。


2019, 12(3): 493-502.
doi: 10.3788/CO.20191203.0493
摘要:
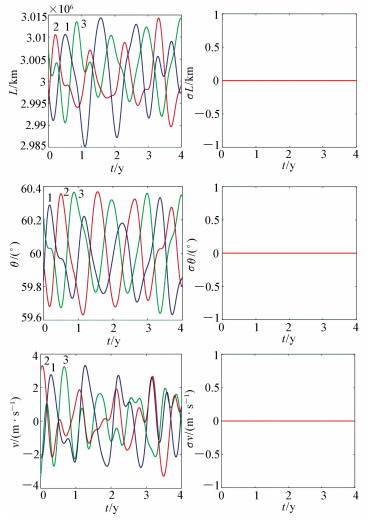
空间引力波探测任务要求构型在长达几年的工作过程中保持高水平稳定,而入轨误差可能会破坏构型的稳定性。因此本文研究了入轨误差对构型的影响。首先,分别用Monte-Carlo法和协方差分析函数描述法(Covariance Analysis Description Equation Technique,CADET)进行对照实验,验证了CADET法的正确性。运用CADET法分别研究了位置速度误差大小和方向对构型的影响。实验结果表明:CADET法具有计算效率高的优点,并且相对误差不超过6%;径向位置误差和切向速度误差对构型影响显著;当编队卫星位置和速度误差相对方向相同时对构型的影响更小;两种误差同时存在时,当位置误差不超过160 km,速度误差不超过3 cm/s时构型可维持稳定。CADET法准确有效且高速,适用于空间引力波探测任务的入轨误差分析。
空间引力波探测任务要求构型在长达几年的工作过程中保持高水平稳定,而入轨误差可能会破坏构型的稳定性。因此本文研究了入轨误差对构型的影响。首先,分别用Monte-Carlo法和协方差分析函数描述法(Covariance Analysis Description Equation Technique,CADET)进行对照实验,验证了CADET法的正确性。运用CADET法分别研究了位置速度误差大小和方向对构型的影响。实验结果表明:CADET法具有计算效率高的优点,并且相对误差不超过6%;径向位置误差和切向速度误差对构型影响显著;当编队卫星位置和速度误差相对方向相同时对构型的影响更小;两种误差同时存在时,当位置误差不超过160 km,速度误差不超过3 cm/s时构型可维持稳定。CADET法准确有效且高速,适用于空间引力波探测任务的入轨误差分析。

2019, 12(3): 503-514.
doi: 10.3788/CO.20191203.0503
摘要:
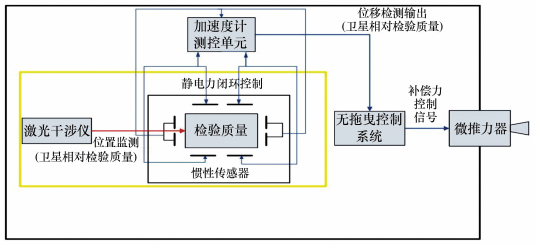
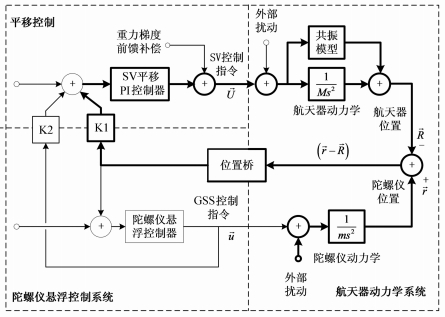
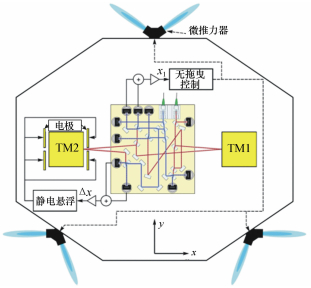
无拖曳控制技术通过控制微推力器产生的推力来抵消航天器受到的非保守力,其是获得超静超稳空间实验平台的关键技术之一。首先总结了无拖曳控制技术的研究现状与发展趋势,系统地总结了国外历次无拖曳航天器控制系统的详细设计方案以及国内的研究进展,随后分析了无拖曳控制技术的特点以及所面临的挑战,并概括了无拖曳控制所涉及到的关键技术。最后针对我国空间引力波探测对无拖曳控制技术的需求做了详细的分析与展望。
无拖曳控制技术通过控制微推力器产生的推力来抵消航天器受到的非保守力,其是获得超静超稳空间实验平台的关键技术之一。首先总结了无拖曳控制技术的研究现状与发展趋势,系统地总结了国外历次无拖曳航天器控制系统的详细设计方案以及国内的研究进展,随后分析了无拖曳控制技术的特点以及所面临的挑战,并概括了无拖曳控制所涉及到的关键技术。最后针对我国空间引力波探测对无拖曳控制技术的需求做了详细的分析与展望。





2019, 12(3): 515-525.
doi: 10.3788/CO.20191203.0515
摘要:
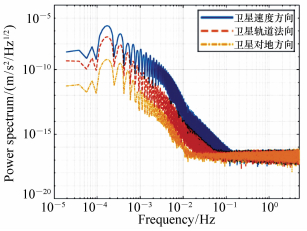
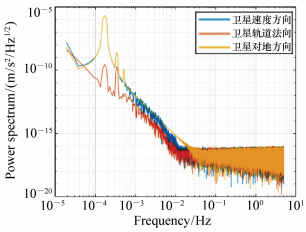
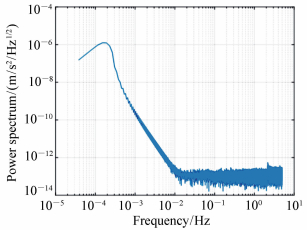
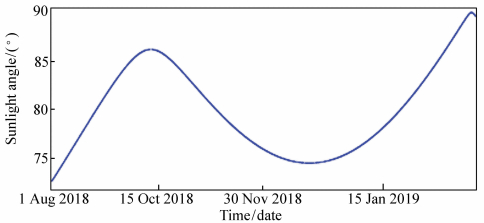
空间引力波探测对剩余加速度的要求极高,达到了10-15 ms-2Hz-1/2量级,然而在空间引力波探测时,惯性传感器所在位置的环境磁场会带来磁场力和洛伦兹力。为保证引力波的正常探测,必须将环境磁场及磁场梯度控制在一定范围内。本文主要针对星上剩磁对惯性传感器的影响,从星际磁场、卫星部件剩磁和时变磁场探测等几个方面探讨了剩磁与加速度之间的关系,也对卫星磁场源模拟以及磁场探测方法进行了讨论。结果表明,通过对磁场源位置和方向进行优化可以降低直流剩磁,通过弱磁探测装置对星际磁场和时变磁场进行实时监控以排除磁场噪声影响,对于得到高精度的引力波探测数据是必不可少的。本文研究说明实施星上剩磁对惯性传感器的影响分析是有必要的,并且可以发展一套卫星平台剩磁评估方案和弱磁探测方法。
空间引力波探测对剩余加速度的要求极高,达到了10-15 ms-2Hz-1/2量级,然而在空间引力波探测时,惯性传感器所在位置的环境磁场会带来磁场力和洛伦兹力。为保证引力波的正常探测,必须将环境磁场及磁场梯度控制在一定范围内。本文主要针对星上剩磁对惯性传感器的影响,从星际磁场、卫星部件剩磁和时变磁场探测等几个方面探讨了剩磁与加速度之间的关系,也对卫星磁场源模拟以及磁场探测方法进行了讨论。结果表明,通过对磁场源位置和方向进行优化可以降低直流剩磁,通过弱磁探测装置对星际磁场和时变磁场进行实时监控以排除磁场噪声影响,对于得到高精度的引力波探测数据是必不可少的。本文研究说明实施星上剩磁对惯性传感器的影响分析是有必要的,并且可以发展一套卫星平台剩磁评估方案和弱磁探测方法。
2019, 12(3): 526-534.
doi: 10.3788/CO.20191203.0526
摘要:
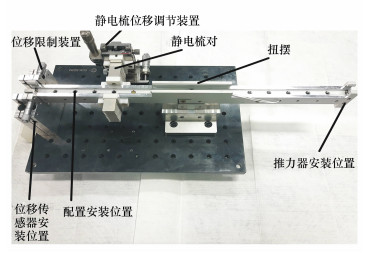
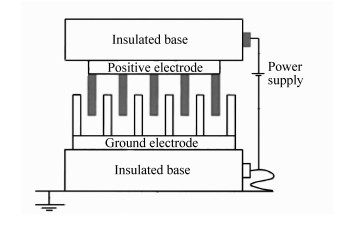
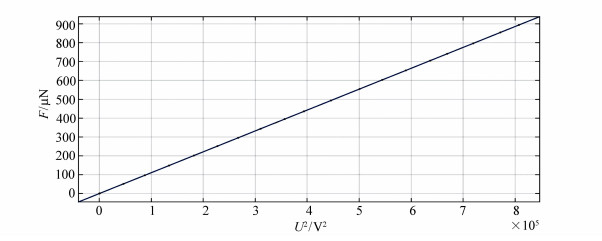
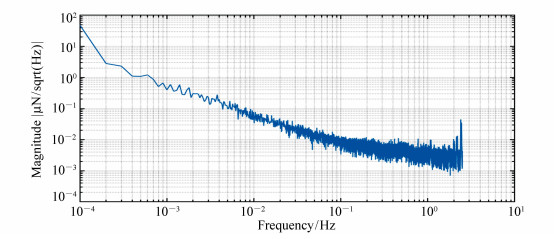
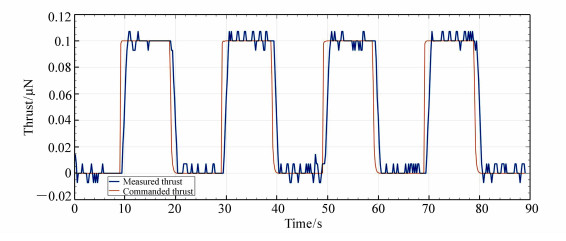
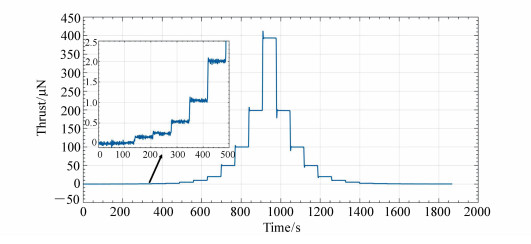
空间引力波探测任务需要具有亚微牛级推力分辨率和推力噪声的微推力器来实现卫星平台高精度无拖曳控制任务,为了在地面对所需微推力器的推力进行标定,设计并研制了一套基于扭摆的亚微牛级推力测量系统。该系统选用高精度、高分辨率电容式位移传感器作为扭摆角位移传感装置,利用高精度电子天平对静电梳进行标定,再利用该静电梳标定扭摆,得到推力与角位移的关系。此外,研究了高精度弱力标定技术和亚微牛级微推力在线测量技术,分析了测量误差来源以及控制方案,最后利用静电梳产生标准弱力测量扭摆推力分辨能力和范围等。实验结果表明:该系统可测推力范围为0~400 μN,分辨率达到0.1 μN,背景噪声功率谱密度优于0.1 μN/
空间引力波探测任务需要具有亚微牛级推力分辨率和推力噪声的微推力器来实现卫星平台高精度无拖曳控制任务,为了在地面对所需微推力器的推力进行标定,设计并研制了一套基于扭摆的亚微牛级推力测量系统。该系统选用高精度、高分辨率电容式位移传感器作为扭摆角位移传感装置,利用高精度电子天平对静电梳进行标定,再利用该静电梳标定扭摆,得到推力与角位移的关系。此外,研究了高精度弱力标定技术和亚微牛级微推力在线测量技术,分析了测量误差来源以及控制方案,最后利用静电梳产生标准弱力测量扭摆推力分辨能力和范围等。实验结果表明:该系统可测推力范围为0~400 μN,分辨率达到0.1 μN,背景噪声功率谱密度优于0.1 μN/


2019, 12(3): 535-558.
doi: 10.3788/CO.20191203.0535
摘要:
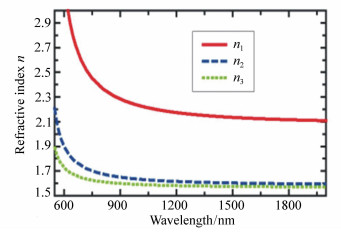
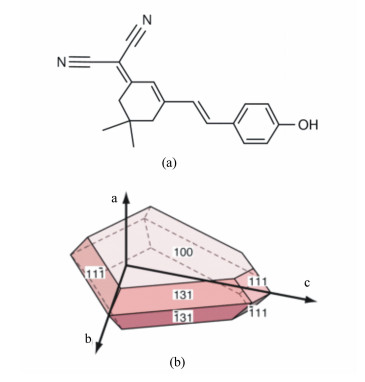
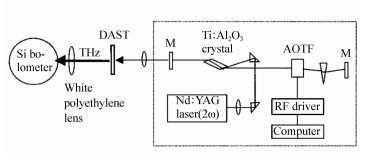
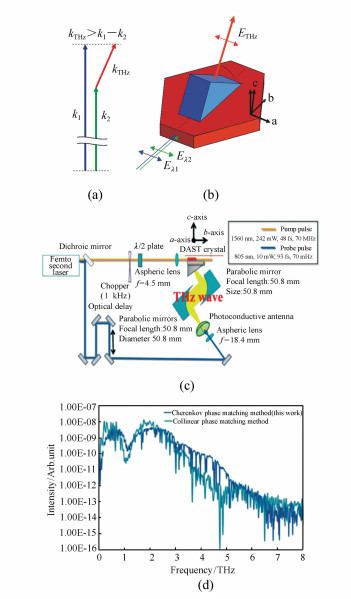
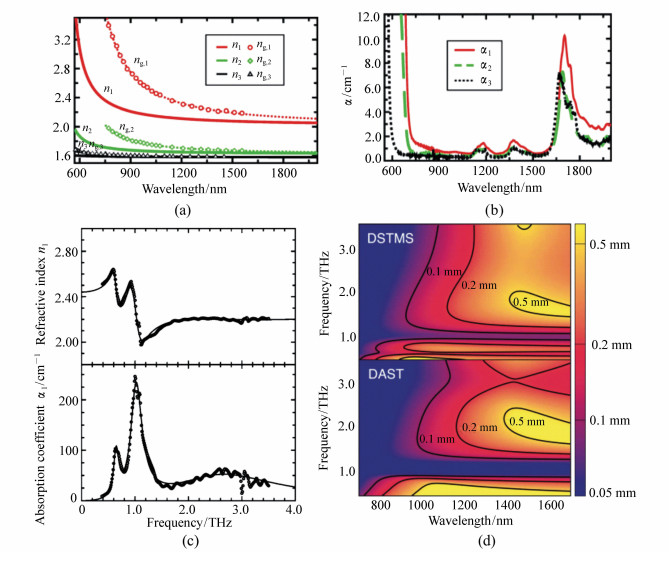
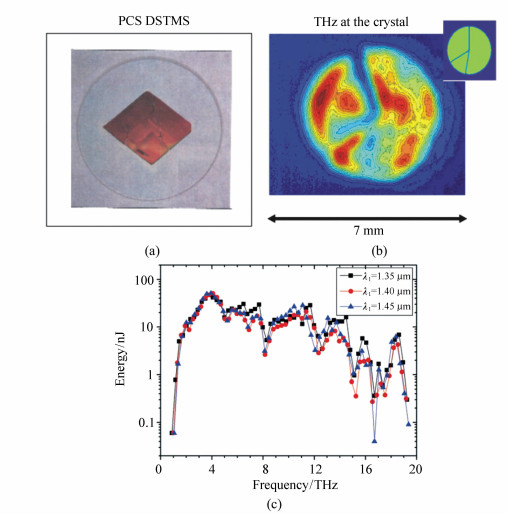
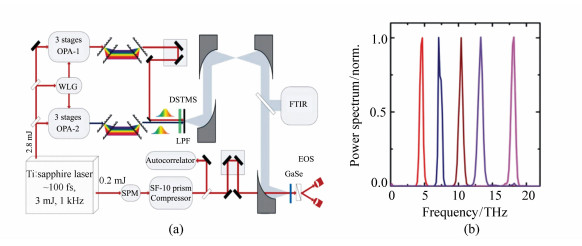
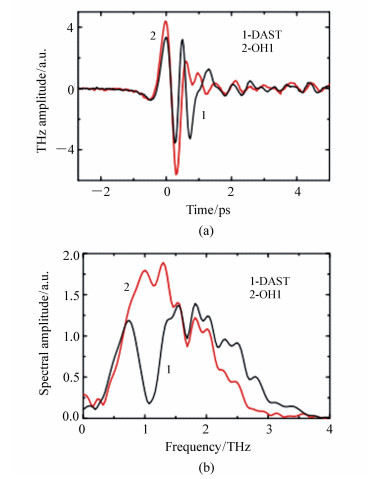
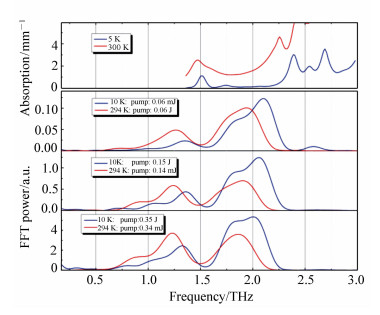
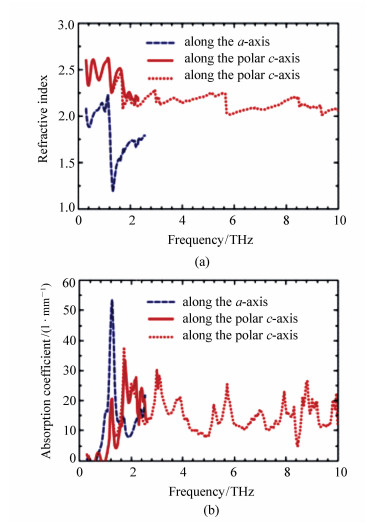
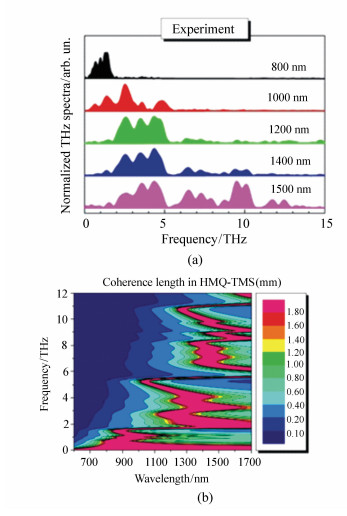
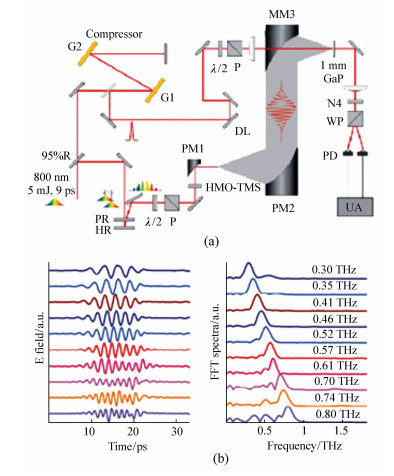
非线性光学晶体是非线性光学频率变换技术中的核心器件。近些年,为进一步提高基于非线性光学频率变换技术产生太赫兹波的输出能量、转换效率,拓宽产生太赫兹波的带宽,多种新型有机晶体得以发展,并凭借其更加出色的非线性光学性质,成为产生太赫兹波的理想材料。本文按照晶体类型介绍了目前可产生THz波的多种有机晶体的性质,并总结了基于多种有机晶体的超宽带太赫兹辐射源的国内外研究进展,同时结合THz光谱检测技术的应用需求分析了基于有机晶体宽带THz辐射源的发展趋势以及所面临的关键科学问题。
非线性光学晶体是非线性光学频率变换技术中的核心器件。近些年,为进一步提高基于非线性光学频率变换技术产生太赫兹波的输出能量、转换效率,拓宽产生太赫兹波的带宽,多种新型有机晶体得以发展,并凭借其更加出色的非线性光学性质,成为产生太赫兹波的理想材料。本文按照晶体类型介绍了目前可产生THz波的多种有机晶体的性质,并总结了基于多种有机晶体的超宽带太赫兹辐射源的国内外研究进展,同时结合THz光谱检测技术的应用需求分析了基于有机晶体宽带THz辐射源的发展趋势以及所面临的关键科学问题。







2019, 12(3): 559-566.
doi: 10.3788/CO.20191203.0559
摘要:
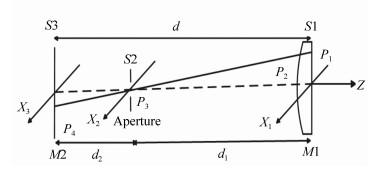
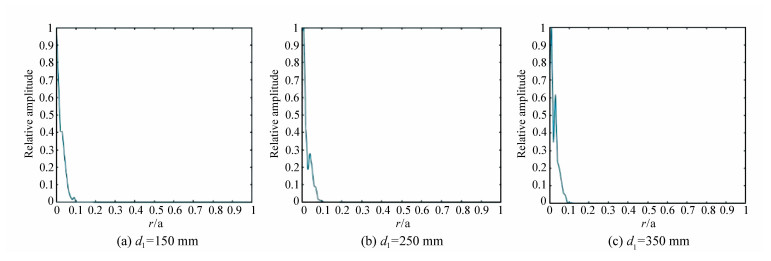
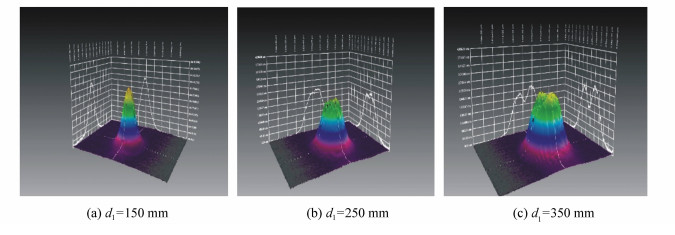
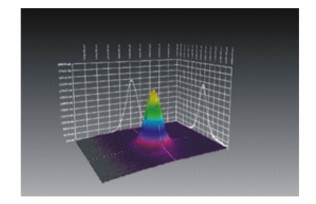
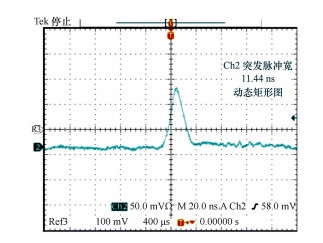
为了获得高光束质量的脉冲固体激光输出,研究了高斯非稳腔固体激光器的模式分布。运用边界有限元法将谐振腔内光场衍射积分方程转化成矩阵方程组,模拟分析了平凸高斯非稳腔内光阑位置、孔径大小以及高斯镜参数对输出光束模式的影响。基于理论模拟结果对激光器结构参数进行了优化,分别测量了腔内不同光阑位置和孔径下的激光器输出光束振幅及模式分布情况。在光阑半径为1 mm、光阑距高斯镜为150 mm、泵浦电压为900 V的实验条件下,光束质量Mx2=1.9、My2=2.3,激光最大输出能量为280 mJ的高光束质量激光输出。实验结果表明,在腔内加入选模光阑以及优化高斯镜参数可以进一步改善腔内模式分布,获得高光束质量激光输出,这与理论模拟结果基本相符。
为了获得高光束质量的脉冲固体激光输出,研究了高斯非稳腔固体激光器的模式分布。运用边界有限元法将谐振腔内光场衍射积分方程转化成矩阵方程组,模拟分析了平凸高斯非稳腔内光阑位置、孔径大小以及高斯镜参数对输出光束模式的影响。基于理论模拟结果对激光器结构参数进行了优化,分别测量了腔内不同光阑位置和孔径下的激光器输出光束振幅及模式分布情况。在光阑半径为1 mm、光阑距高斯镜为150 mm、泵浦电压为900 V的实验条件下,光束质量Mx2=1.9、My2=2.3,激光最大输出能量为280 mJ的高光束质量激光输出。实验结果表明,在腔内加入选模光阑以及优化高斯镜参数可以进一步改善腔内模式分布,获得高光束质量激光输出,这与理论模拟结果基本相符。










2019, 12(3): 567-574.
doi: 10.3788/CO.20191203.0567
摘要:
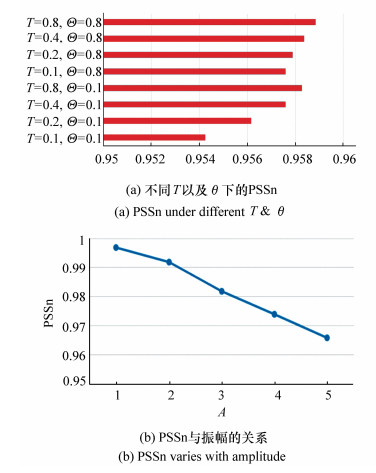
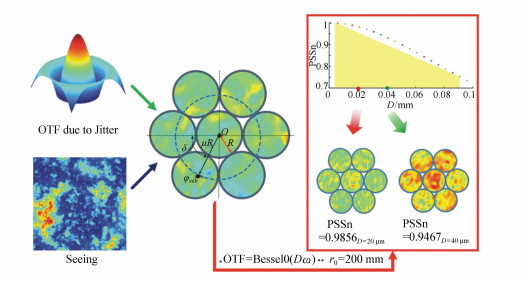
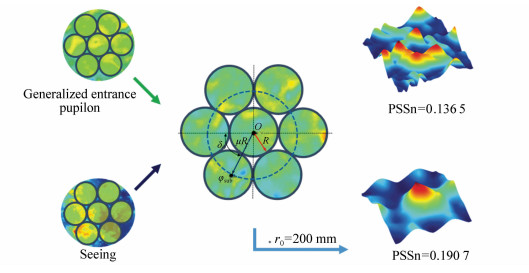
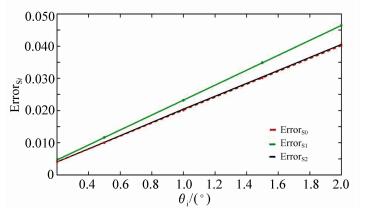
为了更好地对大口径光学系统进行误差分析、分配,本文在美国TMT主镜团队所提出的"标准化点源敏感性"的基础上,研究了大口径合成孔径望远镜各项误差的特性及其分配。首先,对"标准化点源敏感性"的基本性质进行了研究,论述了其作为大口径合成孔径望远镜全频域评价指标的优越性;之后,分析了不同误差源对合成孔径望远镜"标准化点源敏感性"的影响,以及在不同评价尺度下对应的标准化点源敏感性;最后,利用标准化点源敏感性与斜率均方根之间的关系,针对合成孔径望远镜子镜间相对位置误差存在封闭性的特点,提出了基于"Brownian Bridge"过程与"标准化点源敏感性"的误差模型。本文的工作对于类似的大口径系统设计与检测也有着一定指导意义。
为了更好地对大口径光学系统进行误差分析、分配,本文在美国TMT主镜团队所提出的"标准化点源敏感性"的基础上,研究了大口径合成孔径望远镜各项误差的特性及其分配。首先,对"标准化点源敏感性"的基本性质进行了研究,论述了其作为大口径合成孔径望远镜全频域评价指标的优越性;之后,分析了不同误差源对合成孔径望远镜"标准化点源敏感性"的影响,以及在不同评价尺度下对应的标准化点源敏感性;最后,利用标准化点源敏感性与斜率均方根之间的关系,针对合成孔径望远镜子镜间相对位置误差存在封闭性的特点,提出了基于"Brownian Bridge"过程与"标准化点源敏感性"的误差模型。本文的工作对于类似的大口径系统设计与检测也有着一定指导意义。

2019, 12(3): 575-586.
doi: 10.3788/CO.20191203.0575
摘要:
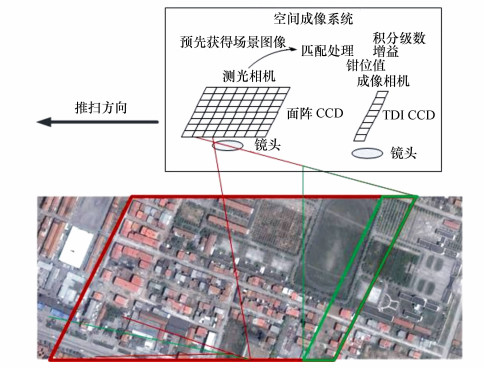
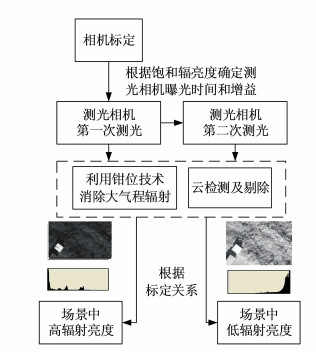
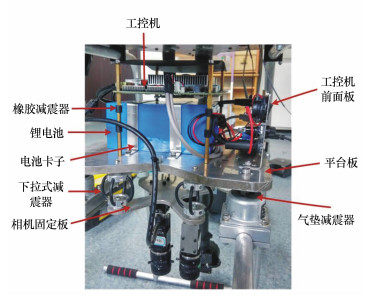
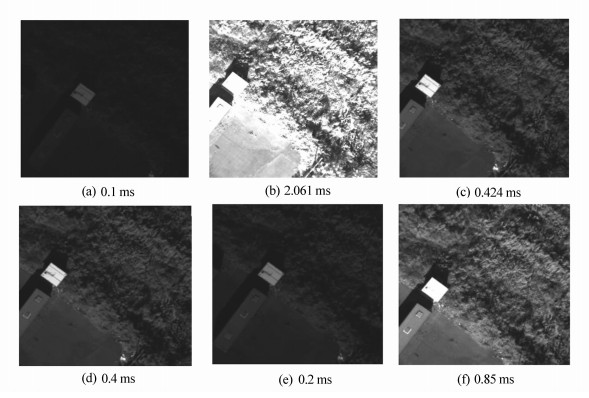
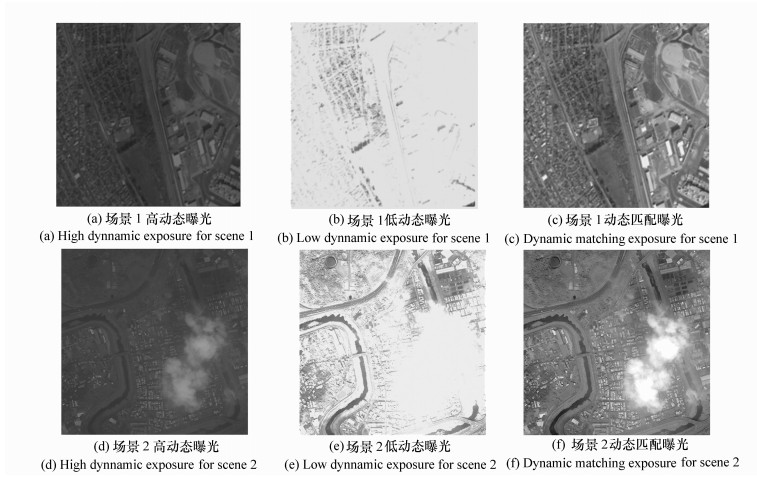
针对目前在轨卫星图像动态范围偏窄、直方图集中、灰度层次不够丰富、暗场景图像细节分辨能力不强的问题,提出一种卫星在轨动态场景实时匹配方法。首先,研究云检测和基于直方图特性的大气程辐射预估方法,消除它们对场景高、低动态测量的影响,并结合测光相机与成像相机辐射响应关系的标定,通过测光相机最多2次拍摄地面场景,实现场景动态范围的实时测量;然后,针对地面场景动态范围通常超出相机动态的问题,设计并提出了基于高亮度和低亮度匹配的相机与场景动态范围匹配方案,同时给出了不同情况下相机在轨参数解算方法。最后,通过无人机飞行试验对匹配方法进行了试验验证,结果表明:利用该方法可根据实时拍摄的地面景物合理地设置相机积分级数和增益,实现相机与场景动态范围的最佳匹配,有效灰阶提升优于100%,信息熵提升优于40%。
针对目前在轨卫星图像动态范围偏窄、直方图集中、灰度层次不够丰富、暗场景图像细节分辨能力不强的问题,提出一种卫星在轨动态场景实时匹配方法。首先,研究云检测和基于直方图特性的大气程辐射预估方法,消除它们对场景高、低动态测量的影响,并结合测光相机与成像相机辐射响应关系的标定,通过测光相机最多2次拍摄地面场景,实现场景动态范围的实时测量;然后,针对地面场景动态范围通常超出相机动态的问题,设计并提出了基于高亮度和低亮度匹配的相机与场景动态范围匹配方案,同时给出了不同情况下相机在轨参数解算方法。最后,通过无人机飞行试验对匹配方法进行了试验验证,结果表明:利用该方法可根据实时拍摄的地面景物合理地设置相机积分级数和增益,实现相机与场景动态范围的最佳匹配,有效灰阶提升优于100%,信息熵提升优于40%。








2019, 12(3): 587-595.
doi: 10.3788/CO.20191203.0587
摘要:
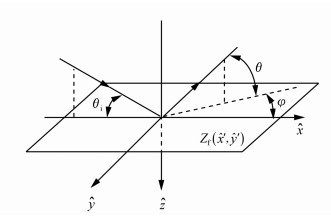
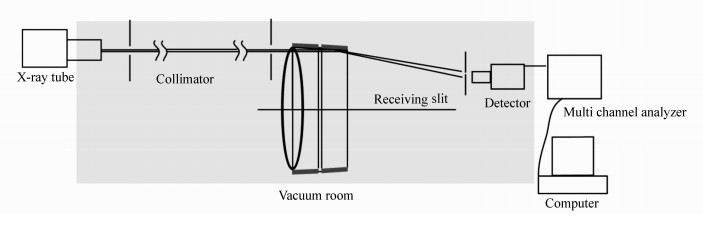
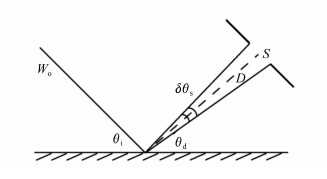
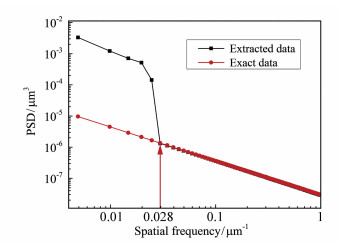
研究X射线散射法在软X射线掠入射望远镜反射镜的表面粗糙度测量中的应用。首先,在光滑表面近似和细光束条件下,根据Harvey-Shack表面散射理论得出反射镜的面形仅影响总反射光分布中的镜向部分,对散射部分的影响可以忽略不计;然后设计了X射线散射法测量Wolter-Ⅰ型软X射线掠入射望远镜的表面粗糙度的实验方案,并且对引起系统误差的主要因素进行了分析,确定了进行仿真实验时的参数;最后用Zemax对实验方案进行了仿真。在空间频率高于28/mm时,表面粗糙度的仿真测量结果与真值吻合得非常好。本文研究结果显示:在光滑表面近似和细光束条件下,反射镜的面形仅影响表面粗糙度的低频部分的测量准确性,对高频部分测量准确性的影响可以忽略不计,利用X射线散射法可以准确测量软X射线掠入射望远镜的表面粗糙度。
研究X射线散射法在软X射线掠入射望远镜反射镜的表面粗糙度测量中的应用。首先,在光滑表面近似和细光束条件下,根据Harvey-Shack表面散射理论得出反射镜的面形仅影响总反射光分布中的镜向部分,对散射部分的影响可以忽略不计;然后设计了X射线散射法测量Wolter-Ⅰ型软X射线掠入射望远镜的表面粗糙度的实验方案,并且对引起系统误差的主要因素进行了分析,确定了进行仿真实验时的参数;最后用Zemax对实验方案进行了仿真。在空间频率高于28/mm时,表面粗糙度的仿真测量结果与真值吻合得非常好。本文研究结果显示:在光滑表面近似和细光束条件下,反射镜的面形仅影响表面粗糙度的低频部分的测量准确性,对高频部分测量准确性的影响可以忽略不计,利用X射线散射法可以准确测量软X射线掠入射望远镜的表面粗糙度。



2019, 12(3): 596-605.
doi: 10.3788/CO.20191203.0596
摘要:
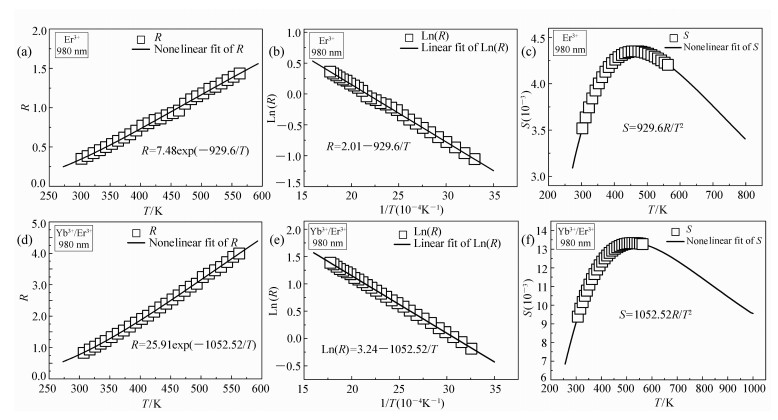
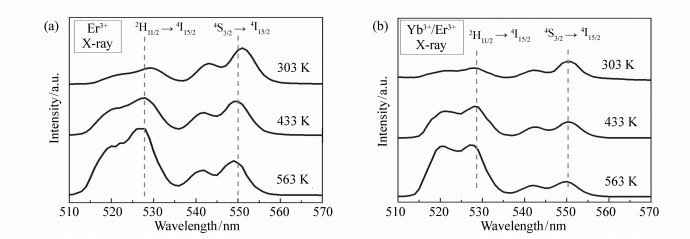
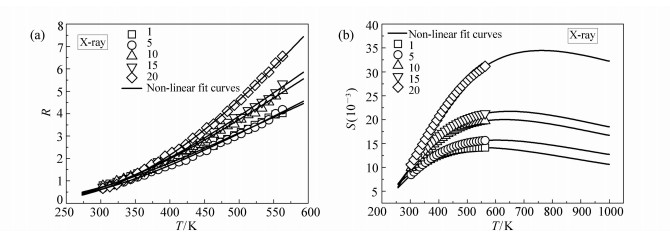
基于Er3+的两个热耦合能级发光强度测量的荧光强度比测温技术由于不受光谱损失和激发强度波动的影响,故能够提供准确的非接触式温度测量。但目前通用的荧光强度比技术都是基于上转换激发,而上转换材料效率较低,测温不准确。考虑到Er3+能级可通过不同激发源来布居,本文利用高能光子激发的高效下转换光学测温方法,来解决上转换发光带来的问题,并以具有高测温灵敏度的钨酸盐NaGd(WO4)2为基质。研究发现,NaGd(WO4)2可成功用于下转换测温,Yb3+/Er3+共掺样品比Er3+单掺拥有更高的测温灵敏度,且下转换测温灵敏度要高于上转换,在掺杂浓度为20% Yb3+/1% Er3+时,测温灵敏度高达344.6×10-4 K-1。这证明了NaGd(WO4)2:Yb3+/Er3+是理想的测温材料,也很好地验证了其在高灵敏度下转换测温的可行性,为荧光强度比技术的应用开辟了新的前景。
基于Er3+的两个热耦合能级发光强度测量的荧光强度比测温技术由于不受光谱损失和激发强度波动的影响,故能够提供准确的非接触式温度测量。但目前通用的荧光强度比技术都是基于上转换激发,而上转换材料效率较低,测温不准确。考虑到Er3+能级可通过不同激发源来布居,本文利用高能光子激发的高效下转换光学测温方法,来解决上转换发光带来的问题,并以具有高测温灵敏度的钨酸盐NaGd(WO4)2为基质。研究发现,NaGd(WO4)2可成功用于下转换测温,Yb3+/Er3+共掺样品比Er3+单掺拥有更高的测温灵敏度,且下转换测温灵敏度要高于上转换,在掺杂浓度为20% Yb3+/1% Er3+时,测温灵敏度高达344.6×10-4 K-1。这证明了NaGd(WO4)2:Yb3+/Er3+是理想的测温材料,也很好地验证了其在高灵敏度下转换测温的可行性,为荧光强度比技术的应用开辟了新的前景。




2019, 12(3): 606-615.
doi: 10.3788/CO.20191203.0606
摘要:
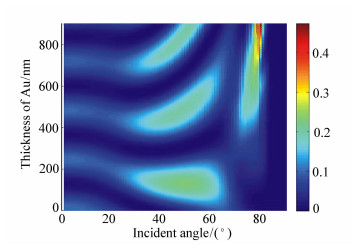
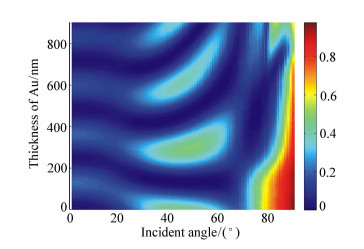
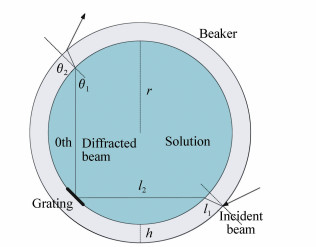
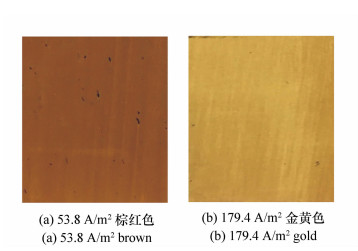
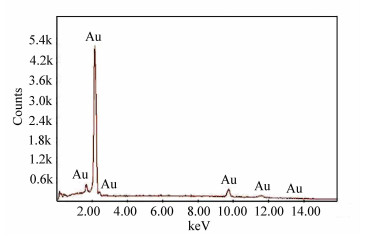
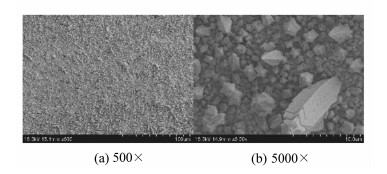
在使用电铸方法制作金属光栅时,采用传统的计时电铸方法常常不能保证金属栅条具有精确的沉积厚度。为了能够实时监测光栅栅条的沉积厚度,以实现电铸截止时刻的精确判断,建立了基于衍射效率判断金属沉积厚度的在线监测系统。采用严格耦合波理论计算了Au在光刻胶沟槽中进行沉积时,衍射效率随Au沉积厚度的变化规律,并讨论了光刻胶占宽比、电铸电流密度对衍射效率的影响;计算了电铸池、镀液对监测激光能量造成的损耗。实验得到的效率曲线与仿真结果相一致;电铸池、镀液对光能的损耗达94.88%。实验结果表明,采用在线监测方法实时判断金属沉积厚度是合理有效的;光刻胶占宽比对在线监测影响不大;电铸电流密度对在线监测有影响,且电流密度越高越有利于截止点的判断。
在使用电铸方法制作金属光栅时,采用传统的计时电铸方法常常不能保证金属栅条具有精确的沉积厚度。为了能够实时监测光栅栅条的沉积厚度,以实现电铸截止时刻的精确判断,建立了基于衍射效率判断金属沉积厚度的在线监测系统。采用严格耦合波理论计算了Au在光刻胶沟槽中进行沉积时,衍射效率随Au沉积厚度的变化规律,并讨论了光刻胶占宽比、电铸电流密度对衍射效率的影响;计算了电铸池、镀液对监测激光能量造成的损耗。实验得到的效率曲线与仿真结果相一致;电铸池、镀液对光能的损耗达94.88%。实验结果表明,采用在线监测方法实时判断金属沉积厚度是合理有效的;光刻胶占宽比对在线监测影响不大;电铸电流密度对在线监测有影响,且电流密度越高越有利于截止点的判断。








2019, 12(3): 616-627.
doi: 10.3788/CO.20191203.0616
摘要:
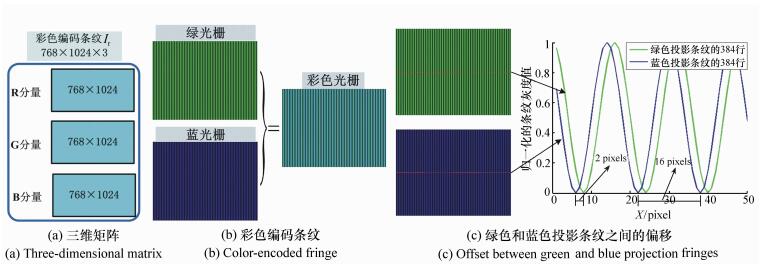
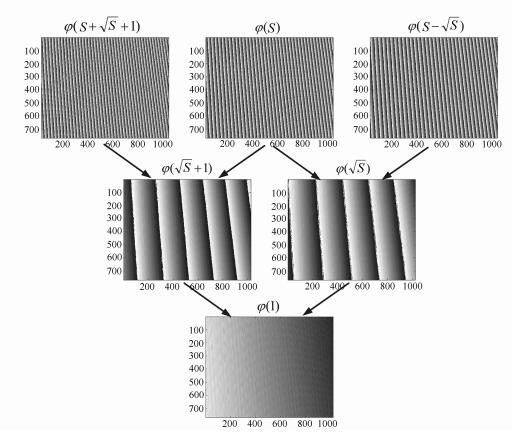
双N步相移轮廓术虽然可以大大降低由于光栅条纹的非正弦性所导致的相位误差,但增加了一倍的投影条纹数量,降低了测量效率。针对此问题,本文提出一种基于彩色编码光栅投影的双N步相移轮廓术,它将原相移条纹和附加相移条纹编码成双色条纹,融合到一幅彩色光栅条纹中投影,然后从采集的彩色条纹中提取两套条纹的相位信息,分别解包裹相位后,融合两包裹相位以减小相位误差。为验证所提方法的有效性,将该方法与两种典型的相位展开算法结合进行实验。实验结果证明,所提方法能有效降低相位误差,且不需要增加任何额外的光栅条纹,测量效率提高了46%。
双N步相移轮廓术虽然可以大大降低由于光栅条纹的非正弦性所导致的相位误差,但增加了一倍的投影条纹数量,降低了测量效率。针对此问题,本文提出一种基于彩色编码光栅投影的双N步相移轮廓术,它将原相移条纹和附加相移条纹编码成双色条纹,融合到一幅彩色光栅条纹中投影,然后从采集的彩色条纹中提取两套条纹的相位信息,分别解包裹相位后,融合两包裹相位以减小相位误差。为验证所提方法的有效性,将该方法与两种典型的相位展开算法结合进行实验。实验结果证明,所提方法能有效降低相位误差,且不需要增加任何额外的光栅条纹,测量效率提高了46%。







2019, 12(3): 628-637.
doi: 10.3788/CO.20191203.0628
摘要:
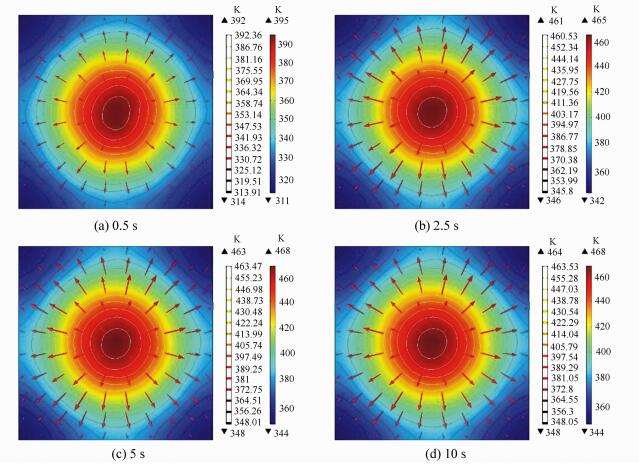
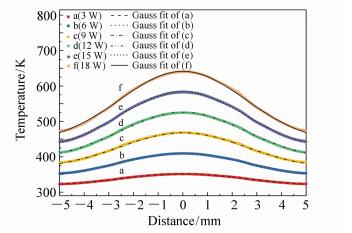
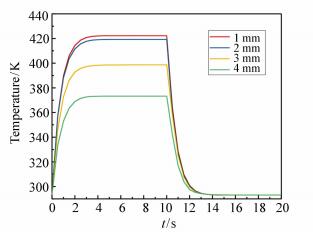
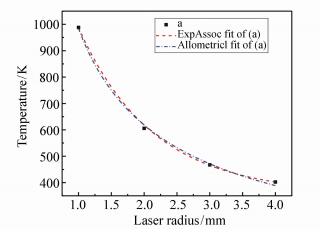
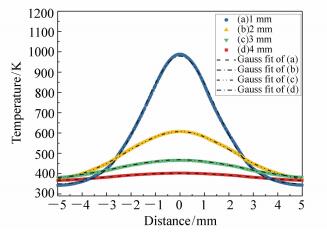
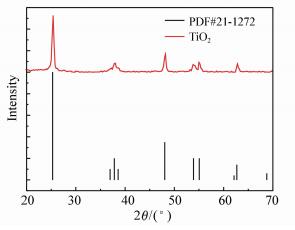
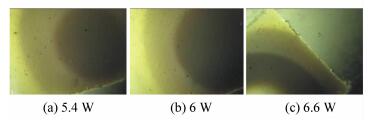
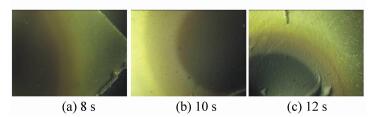
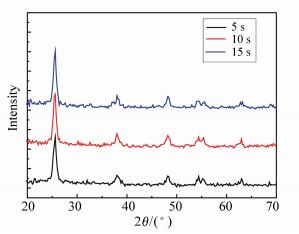
热传导规律的研究在激光诱导薄膜材料改性等应用中有着重要的作用,本文针对二氧化碳激光器辐照下的二氧化钛(TiO2)薄膜表面的热效应进行了理论仿真和实验研究。首先,对具有粗糙上表面的TiO2薄膜,利用有限元法构建了连续激光作用下的TiO2薄膜的立体模型并得到了其三维温度场分布。然后使用CO2激光器进行辐照实验,分析了辐照时间和功率等参数对TiO2薄膜形貌、晶相以及颜色的影响。仿真表明,连续激光辐照下TiO2薄膜的瞬态温度场呈高斯分布,且与激光功率、光斑半径、辐照时间等因素有关。当表面温度小于分解温度时,薄膜上表面最大平均温度与激光功率满足线性关系,与光斑半径满足ExpAssoc非线性关系。实验结果表明,激光辐照引起TiO2薄膜材料表面粗糙度降低且颜色变化。激光功率过小或辐照时间过短会导致有效作用面积小且不均匀,反之会产生热形变。结合仿真和实验可知使用功率为6 W,半径为3 mm的连续激光辐照TiO2薄膜10 s时取得的处理效果最优。
热传导规律的研究在激光诱导薄膜材料改性等应用中有着重要的作用,本文针对二氧化碳激光器辐照下的二氧化钛(TiO2)薄膜表面的热效应进行了理论仿真和实验研究。首先,对具有粗糙上表面的TiO2薄膜,利用有限元法构建了连续激光作用下的TiO2薄膜的立体模型并得到了其三维温度场分布。然后使用CO2激光器进行辐照实验,分析了辐照时间和功率等参数对TiO2薄膜形貌、晶相以及颜色的影响。仿真表明,连续激光辐照下TiO2薄膜的瞬态温度场呈高斯分布,且与激光功率、光斑半径、辐照时间等因素有关。当表面温度小于分解温度时,薄膜上表面最大平均温度与激光功率满足线性关系,与光斑半径满足ExpAssoc非线性关系。实验结果表明,激光辐照引起TiO2薄膜材料表面粗糙度降低且颜色变化。激光功率过小或辐照时间过短会导致有效作用面积小且不均匀,反之会产生热形变。结合仿真和实验可知使用功率为6 W,半径为3 mm的连续激光辐照TiO2薄膜10 s时取得的处理效果最优。



2019, 12(3): 638-648.
doi: 10.3788/CO.20191203.0638
摘要:
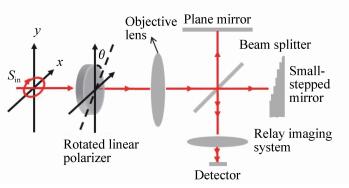
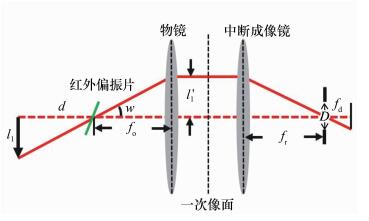
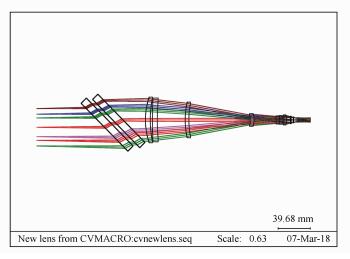
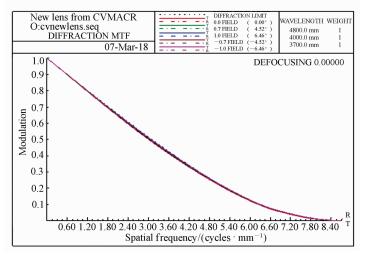
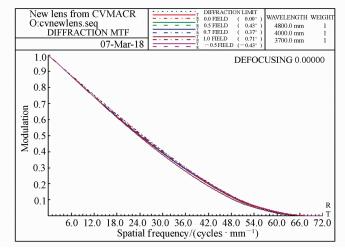
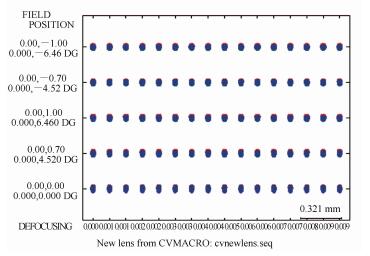
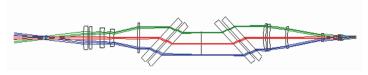
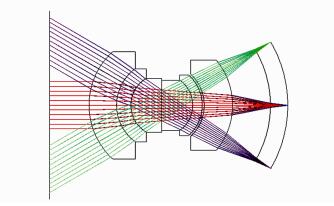
为满足中波红外高空间分辨率偏振干涉测量需求,本文提出一种基于微型静态干涉原理的中波红外线偏振干涉成像系统。该系统不含狭缝,具有信息量多,光通量大等优点。介绍了线偏振干涉成像系统的工作原理,采用近轴光学理论计算了初始结构参数,进行了系统优化设计。分析了入射光分别为完全非偏振光和线偏振光时系统的透过率,给出了系统所能探测的最小辐射强度。为了降低探测器强度的随机波动对偏振测量的影响,采用等权重方差优化了系统的偏振测量矩阵,并通过数值仿真验证了方法的正确性。最后,分析了偏振片的旋转误差对偏振测量的影响,给出了偏振探测精度为2%时的偏振片旋转公差容限。设计结果表明:傅立叶变换型线偏振干涉成像系统成像质量良好,在探测器的特征频率17 lp/mm处,各视场的调制传递函数值均大于0.6,满足系统的使用需求。
为满足中波红外高空间分辨率偏振干涉测量需求,本文提出一种基于微型静态干涉原理的中波红外线偏振干涉成像系统。该系统不含狭缝,具有信息量多,光通量大等优点。介绍了线偏振干涉成像系统的工作原理,采用近轴光学理论计算了初始结构参数,进行了系统优化设计。分析了入射光分别为完全非偏振光和线偏振光时系统的透过率,给出了系统所能探测的最小辐射强度。为了降低探测器强度的随机波动对偏振测量的影响,采用等权重方差优化了系统的偏振测量矩阵,并通过数值仿真验证了方法的正确性。最后,分析了偏振片的旋转误差对偏振测量的影响,给出了偏振探测精度为2%时的偏振片旋转公差容限。设计结果表明:傅立叶变换型线偏振干涉成像系统成像质量良好,在探测器的特征频率17 lp/mm处,各视场的调制传递函数值均大于0.6,满足系统的使用需求。






2019, 12(3): 649-662.
doi: 10.3788/CO.20191203.0649
摘要:
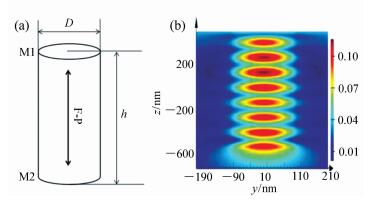
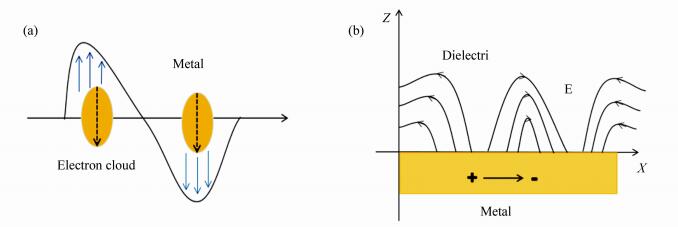
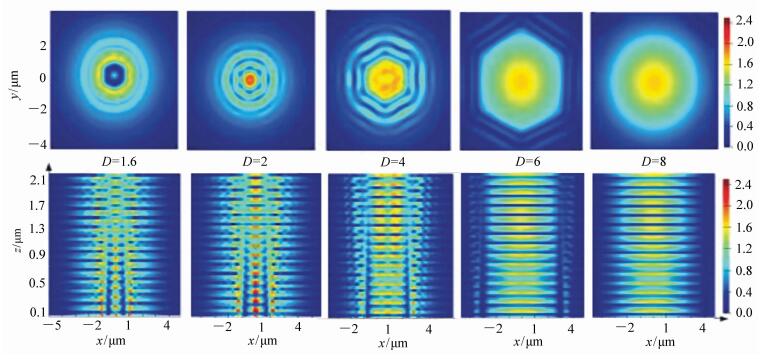
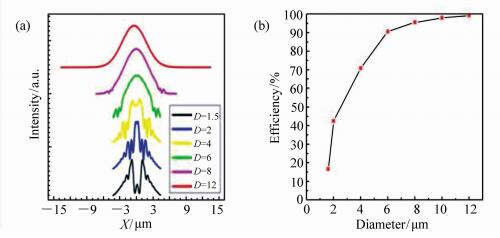
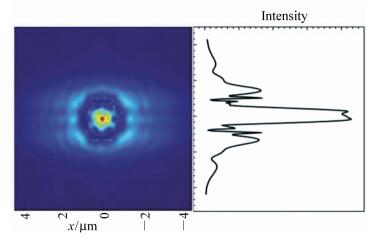
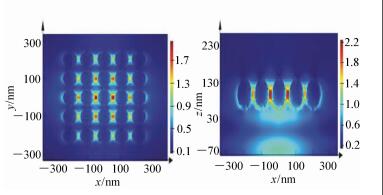
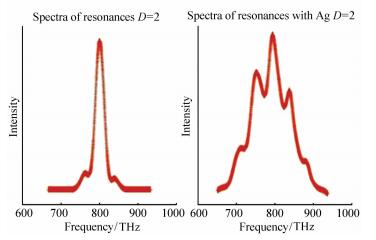
目前,利用氧化锌(ZnO)微纳米线结构形成具有自然谐振腔的紫外激光器件引起国内外广泛关注。针对ZnO本征缺陷导致器件发光及稳定性不足等问题,开展金属局域等离子激元局域场发光增强方面的研究,对ZnO基紫外激光器件的应用具有十分重要的意义。本文通过理论仿真构建氧化锌微米线结构模型,对微腔光学损耗及Fabry-Perot(F-P)谐振腔模式演化进行了理论分析。得到ZnO微腔直径变化与F-P谐振模式演化、光学损耗和光强分布的关系。在此基础上通过金属Ag纳米颗粒对ZnO微米线6个表面进行修饰,发现金属局域表面等离子激元共振耦合效应对微腔周围的损耗光有明显的抑制作用,并且在金属与微腔的交叉区通过共振耦合效应实现局域场增强。模拟结果表明,在损耗较大的微腔表面修饰Ag纳米颗粒以后,光场限域能力提高6.72%,而在金属颗粒之间沿X轴方向产生二次耦合现象,其电场强度更有2倍的增强效果。
目前,利用氧化锌(ZnO)微纳米线结构形成具有自然谐振腔的紫外激光器件引起国内外广泛关注。针对ZnO本征缺陷导致器件发光及稳定性不足等问题,开展金属局域等离子激元局域场发光增强方面的研究,对ZnO基紫外激光器件的应用具有十分重要的意义。本文通过理论仿真构建氧化锌微米线结构模型,对微腔光学损耗及Fabry-Perot(F-P)谐振腔模式演化进行了理论分析。得到ZnO微腔直径变化与F-P谐振模式演化、光学损耗和光强分布的关系。在此基础上通过金属Ag纳米颗粒对ZnO微米线6个表面进行修饰,发现金属局域表面等离子激元共振耦合效应对微腔周围的损耗光有明显的抑制作用,并且在金属与微腔的交叉区通过共振耦合效应实现局域场增强。模拟结果表明,在损耗较大的微腔表面修饰Ag纳米颗粒以后,光场限域能力提高6.72%,而在金属颗粒之间沿X轴方向产生二次耦合现象,其电场强度更有2倍的增强效果。




2019, 12(3): 670-677.
doi: 10.3788/CO.20191203.0670
摘要:
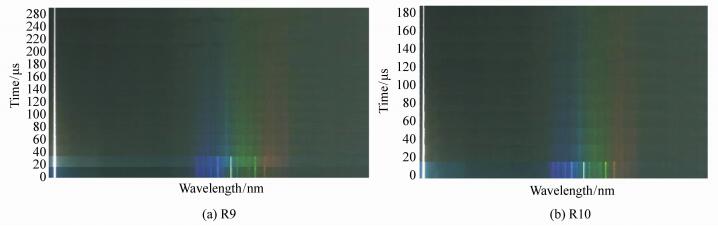
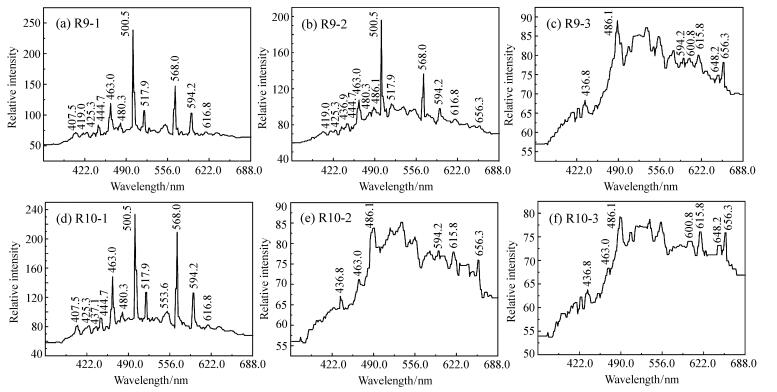
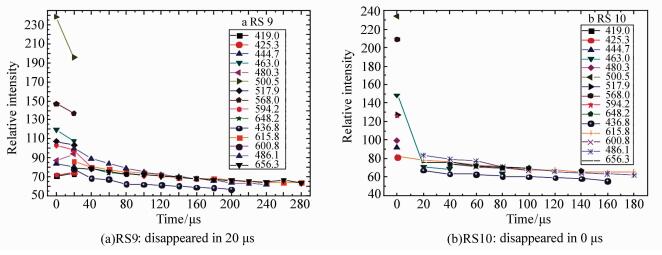
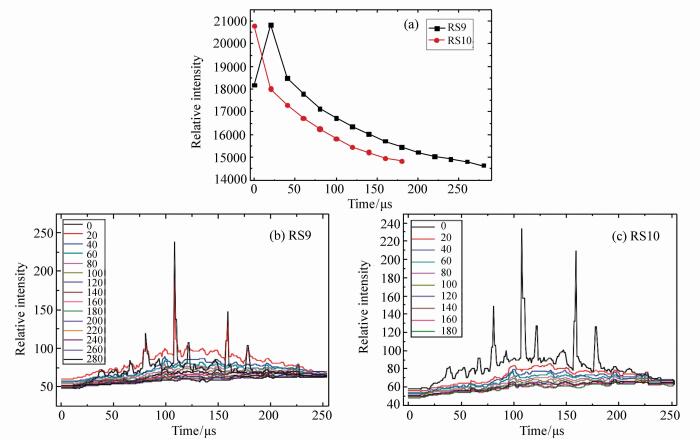
利用无狭缝光谱仪获得了一次人工触发闪电过程的发射光谱,其时间分辨率为20 μs,同时获得了通道底部电流强度,对不同电流强度下闪电光谱的辐射特性进行了分析。根据谱线持续时间将谱线分为三类,结合谱线激发能以及通道电流变化对影响谱线持续时间的原因展开了研究。对光谱总强度随时间的变化规律进行了分析,对闪电光谱短波段与长波段连续背景辐射的不同机制进行了分析,给出了两种辐射机制对连续背景辐射衰减的影响。
利用无狭缝光谱仪获得了一次人工触发闪电过程的发射光谱,其时间分辨率为20 μs,同时获得了通道底部电流强度,对不同电流强度下闪电光谱的辐射特性进行了分析。根据谱线持续时间将谱线分为三类,结合谱线激发能以及通道电流变化对影响谱线持续时间的原因展开了研究。对光谱总强度随时间的变化规律进行了分析,对闪电光谱短波段与长波段连续背景辐射的不同机制进行了分析,给出了两种辐射机制对连续背景辐射衰减的影响。

2019, 12(3): 678-685.
doi: 10.3788/CO.20191203.0678
摘要:
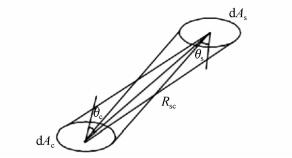
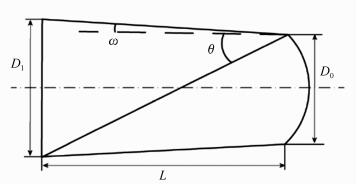
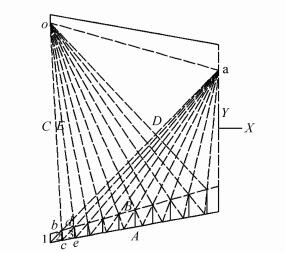
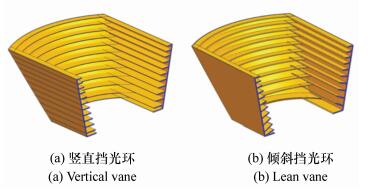
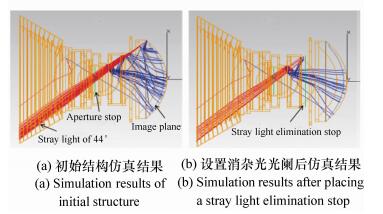
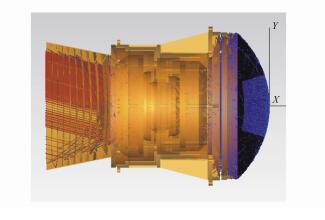
空间相机用于对空间暗弱目标的探测与监视,视场外杂散光的进入会降低像面对比度,严重时甚至会导致相机无法工作。大视场光学系统对杂散光尤为敏感。针对此问题,本文以一大视场空间相机为例,分析其杂散光的来源,通过研究杂光传输机理并总结抑制措施。为满足其轻小型的指标要求,在尺寸限制下分别设计挡光环垂直光轴和倾斜的遮光罩及光阑等消杂光结构。TracePro软件仿真结果显示:倾斜挡光环遮光罩的效果更好,该结构在杂光抑制角外的的点源透过率(PST)均达到10-7量级,系统至少可以满足6.5星等目标的探测,验证本文消杂光结构方案的有效性,为后续的系统优化提供了一定的参考。
空间相机用于对空间暗弱目标的探测与监视,视场外杂散光的进入会降低像面对比度,严重时甚至会导致相机无法工作。大视场光学系统对杂散光尤为敏感。针对此问题,本文以一大视场空间相机为例,分析其杂散光的来源,通过研究杂光传输机理并总结抑制措施。为满足其轻小型的指标要求,在尺寸限制下分别设计挡光环垂直光轴和倾斜的遮光罩及光阑等消杂光结构。TracePro软件仿真结果显示:倾斜挡光环遮光罩的效果更好,该结构在杂光抑制角外的的点源透过率(PST)均达到10-7量级,系统至少可以满足6.5星等目标的探测,验证本文消杂光结构方案的有效性,为后续的系统优化提供了一定的参考。



2019, 12(3): 686-692.
doi: 10.3788/CO.20191203.0686
摘要:
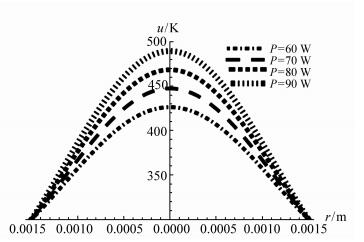
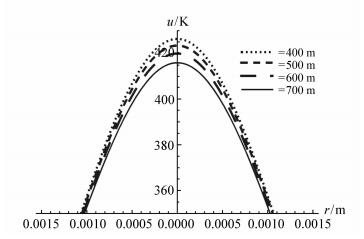
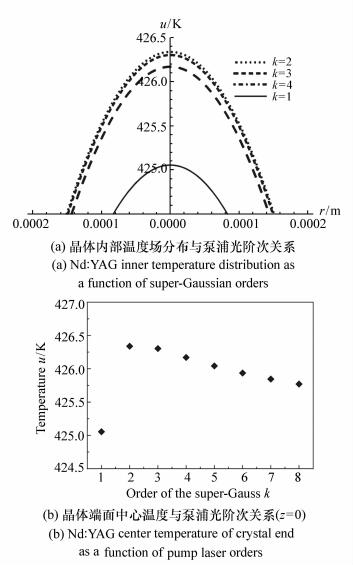
为了实现激光二极管端面泵浦Nd:YAG晶体温度场的精确计算,在晶体端面导热边界条件下建立热模型。首先根据热传导方程,以解析分析理论为基础,应用常数变易法和特征函数法,在考虑晶体端面存在热交换情况下,计算得到808 nm激光泵浦Nd:YAG圆棒晶体的温度场分布,分析了泵浦激光功率、光束半径及超高阶次等因素对晶体温度场分布的影响。分析结果表明:当功率为60 W、光斑半径为0.4 mm的泵浦光作用于半径为1.5 mm,长度为5 mm的Nd:YAG圆棒晶体时,该晶体内部最高温升出现在泵浦端面中心处,最高温升为426.3 K,得到晶体的热透镜焦距为272.98 mm。由于在计算中考虑了空气的导热作用对晶体温度场分布的影响,更符合实际情况,因此结果能更真实反映晶体内部温度场的分布情况。本文研究为精确分析相关激光晶体的温度场分布提供了指导,并为激光器性能的优化提供了理论依据。
为了实现激光二极管端面泵浦Nd:YAG晶体温度场的精确计算,在晶体端面导热边界条件下建立热模型。首先根据热传导方程,以解析分析理论为基础,应用常数变易法和特征函数法,在考虑晶体端面存在热交换情况下,计算得到808 nm激光泵浦Nd:YAG圆棒晶体的温度场分布,分析了泵浦激光功率、光束半径及超高阶次等因素对晶体温度场分布的影响。分析结果表明:当功率为60 W、光斑半径为0.4 mm的泵浦光作用于半径为1.5 mm,长度为5 mm的Nd:YAG圆棒晶体时,该晶体内部最高温升出现在泵浦端面中心处,最高温升为426.3 K,得到晶体的热透镜焦距为272.98 mm。由于在计算中考虑了空气的导热作用对晶体温度场分布的影响,更符合实际情况,因此结果能更真实反映晶体内部温度场的分布情况。本文研究为精确分析相关激光晶体的温度场分布提供了指导,并为激光器性能的优化提供了理论依据。


2019, 12(3): 693-700.
doi: 10.3788/CO.20191203.0693
摘要:
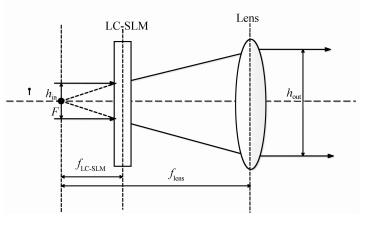
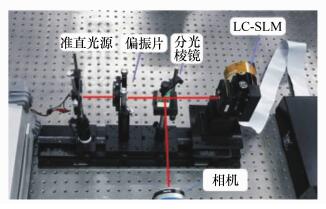
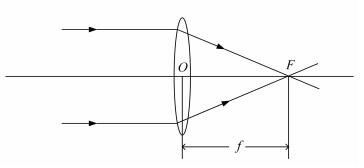
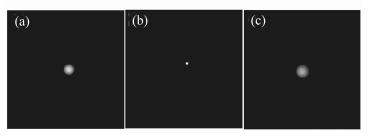
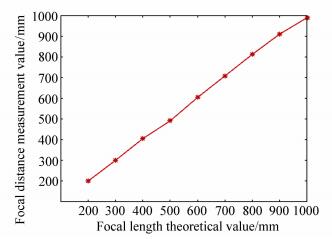
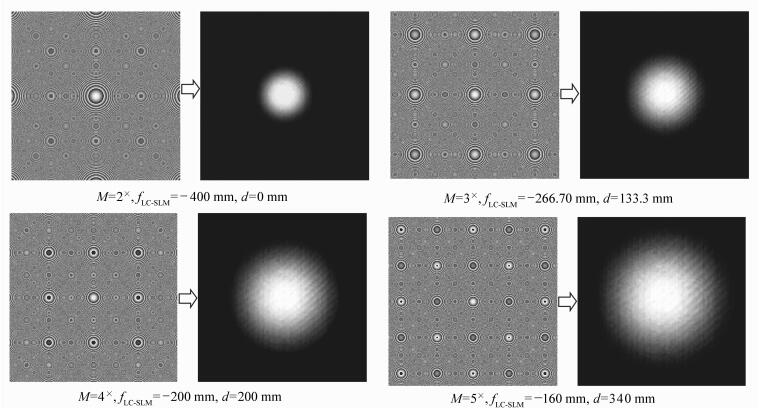
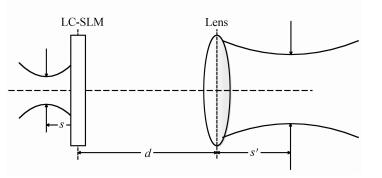
为了实现对激光束的准直变倍扩束,提出了一种基于液晶空间光调制器(Liquid Crystal Spatial Light Modulator,LC-SLM)实现数字变焦透镜的方法,并利用这种方法搭建了基于LC-SLM的变焦扩束系统。首先根据透镜相位变换原理和LC-SLM的相位调制特性由计算机编程生成不同焦距的数字透镜相位调制图,实现不同焦距的数字透镜功能,通过凸透镜对平行光束的汇聚作用,验证该功能的有效性,平均误差为0.95%。上述结果说明LC-SLM能够实现变焦透镜功能。接下来,通过与汇聚透镜组合实现对激光束的连续变倍率准直扩束。该系统的扩束倍率为2×~5×,均方根误差为0.539 7 mm,峰谷值为0.99 mm。实验结果表明,本文提出的方法可以实现对激光束不同倍率的扩束且扩束比连续可变。该系统解决了传统变焦系统无法满足多变的激光扩束需求的问题,且结构简单,精度高,在激光扩束应用方面具有广泛应用前景。
为了实现对激光束的准直变倍扩束,提出了一种基于液晶空间光调制器(Liquid Crystal Spatial Light Modulator,LC-SLM)实现数字变焦透镜的方法,并利用这种方法搭建了基于LC-SLM的变焦扩束系统。首先根据透镜相位变换原理和LC-SLM的相位调制特性由计算机编程生成不同焦距的数字透镜相位调制图,实现不同焦距的数字透镜功能,通过凸透镜对平行光束的汇聚作用,验证该功能的有效性,平均误差为0.95%。上述结果说明LC-SLM能够实现变焦透镜功能。接下来,通过与汇聚透镜组合实现对激光束的连续变倍率准直扩束。该系统的扩束倍率为2×~5×,均方根误差为0.539 7 mm,峰谷值为0.99 mm。实验结果表明,本文提出的方法可以实现对激光束不同倍率的扩束且扩束比连续可变。该系统解决了传统变焦系统无法满足多变的激光扩束需求的问题,且结构简单,精度高,在激光扩束应用方面具有广泛应用前景。