


-
摘要: 空间引力波探测任务中,由于干涉臂臂长的巨大差异,激光频率不稳定噪声成为系统最大的噪声源之一。需采用Pound-Drever-Hall锁腔、锁臂和TDI(Time Delay Interferometer)技术三级联合,将此噪声压制到10-6 Hz1/2量级,才能使得频率噪声低于散粒噪声。而实现TDI技术需要准确测量卫星间的绝对距离和星间通信。本文以空间引力波探测中的绝对距离测量和通信技术为背景,详细阐述此项技术的实现原理和方法。拟通过EOM(Electro-Optic Modulator)将测距伪随机码和通信码调制至主激光相位中,再传输至远端航天器。在远端航天器通过锁相环和延迟环组成的解调系统计算伪随机码的时间延迟,进而解析出卫星间的绝对距离和通信信息。相关结论可为未来的验证实验奠定理论和技术基础,同时为我国未来空间引力波探测的相关技术发展提供一定参考。Abstract: Due to the large unequal interferometer arm, laser frequency jitter noise is the dominant noise in space gravitational wave detection. This noise can be less than shot noise when the frequency jitter is suppressed below than 10-6 Hz1/2 through the combination of PDH(Pound-Drever-Hall), arm locking and TDI (Time Delay Interferometer) technologies. However, absolute ranging and laser communication are the preconditions of the TDI. In this paper, we discuss the principle and implementation of the absolute ranging and laser communication. The pseudo-random code and communication code are modulated by the EOM(Electro-Optic Modulator) into the phase of the main laser beam and then sent to the far satellite. The absolute distance and the message can be obtained through the PLL(Phase Lock Loop) and the DLL(Delay Lock Loop). The related conclusions can be regarded as the basis and principle for related experimentation and will give a design reference for future space gravitational wave detection in our country.
-

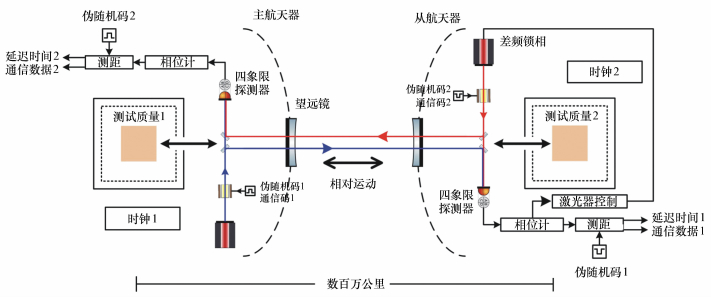
图 2 星间绝对距离测量和激光通信原理图
Figure 2. Principle diagram of the inter-satellites absolute ranging and laser communication
-
[1] ABBOTT B P, ABBOTT R, ABBOTT T D, et al.. Observation of gravitational waves from a binary black hole merger[J]. Physical Review Letters, 2016, 116(6):061102. doi: 10.1103/PhysRevLett.116.061102 [2] ABBOTT B P, ABBOTT R, ABBOTT T D, et al.. Prospects for observing and localizing gravitational-wave transients with advanced LIGO, advanced virgo and KAGRA[J]. Living Reviews in Relativity, 2018, 21(1):3. doi: 10.1007/s41114-018-0012-9 [3] PITKIN M, REID S, ROWAN S, et al.. Gravitational wave detection by interferometry(ground and space)[J]. Living Reviews in Relativity, 2011, 14(1):5. doi: 10.12942/lrr-2011-5 [4] GAIR J R, VALLISNERI M, LARSON S L, et al.. Testing general relativity with low-frequency, space-based gravitational-wave detectors[J]. Living Reviews in Relativity, 2013, 16(1):7. doi: 10.12942/lrr-2013-7 [5] BINÉTRUY P, BOHÉ A, CAPRINI C, et al.. Cosmological backgrounds of gravitational waves and eLISA/NGO: phase transitions, cosmic strings and other sources[J]. Journal of Cosmology and Astroparticle Physics, Institute of Physics(IOP)., 2012(6):027. http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1201.0983 [6] 王智, 马军, 李静秋.空间引力波探测计划-LISA系统设计要点[J].中国光学, 2015, 8(6):980-987. http://www.chineseoptics.net.cn/CN/abstract/abstract9334.shtmlWANG ZH, MA J, LI J Q. Space-based gravitational wave detection mission: design highlights of LISA system[J]. Chinese Optics, 2015, 8(6):980-987.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9334.shtml [7] 王智, 沙巍, 陈哲, 等.空间引力波探测望远镜初步设计与分析[J].中国光学, 2018, 11(1):131-151. http://www.chineseoptics.net.cn/CN/abstract/abstract9549.shtmlWANG ZH, SHA W, CHEN ZH, et al.. Preliminary design and analysis of telescope for space gravitational wave detection[J]. Chinese Optics, 2018, 11(1):131-151.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9549.shtml [8] ARMANO M, AUDLEY H, AUGER G, et al.. Sub-femto-g free fall for space-based gravitational wave observatories:LISA pathfinder results[J]. Physical Review Letters, 2016, 116(23):231101. doi: 10.1103/PhysRevLett.116.231101 [9] HU W R, WU Y L. The Taiji program in space for gravitational wave physics and the nature of gravity[J]. National Science Review, 2017, 4(5):685-686. doi: 10.1093/nsr/nwx116 [10] JIN G. Program in space detection of gravitational wave in Chinese Academy of Sciences[J]. Journal of Physics: Conference Series, 2017, 840(1):012009. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=IOP_9343271 [11] LUO J, CHEN L SH, DUAN H Z, et al.. TianQin:a space-borne gravitational wave detector[J]. Classical and Quantum Gravity, 2016, 33(3):035010. doi: 10.1088/0264-9381/33/3/035010 [12] 罗子人, 白姗, 边星, 等.空间激光干涉引力波探测[J].力学进展, 2013, 43(4):415-447. http://d.old.wanfangdata.com.cn/Periodical/twxjz201501004LUO Z R, BAI SH, BIAN X, et al.. Gravitational wave detection by space laser interferometry[J]. Advances in Mechanics, 2013, 43(4):415-447.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/twxjz201501004 [13] GERBERDING O, ISLEIF K S, MEHMET M, et al.. Laser-frequency stabilization via a quasimonolithic mach-zehnder interferometer with arms of unequal length and balanced dc readout[J]. Physical Review Applied, 2017, 7(2):024027. doi: 10.1103/PhysRevApplied.7.024027 [14] SHEARD B, HEINZEL G, DANZMANN K. LISA long-arm interferometry:an alternative frequency pre-stabilization system[J]. Classical and Quantum Gravity, 2010, 27(8):084011. doi: 10.1088/0264-9381/27/8/084011 [15] HEINZEL G, JOSÉESTEBAN J, BARKE S, et al.. Auxiliary functions of the LISA laser link:ranging, clock noise transfer and data communication[J]. Classical and Quantum Gravity, 2011, 28(9):094008. doi: 10.1088/0264-9381/28/9/094008 [16] ESTEBAN J J, GARCÍA A F, BARKE S, et al.. Experimental demonstration of weak-light laser ranging and data communication for LISA[J]. Optics Express, 2011, 19(17):15937-15946. doi: 10.1364/OE.19.015937 [17] POLLACK S E, STEBBINS R T. A demonstration of LISA laser communication[J]. Classical and Quantum Gravity, 2006, 23(12):4201-4213. doi: 10.1088/0264-9381/23/12/015 [18] TINTO M, DHURANDHAR S V. Time-delay interferometry[J]. Living Reviews in Relativity, 2014, 17(1):6. doi: 10.12942/lrr-2014-6 [19] SUTTON A, MCKENZIE K, WARE B, et al.. Laser ranging and communications for LISA[J]. Optics Express, 2010, 18(20):20759-20773. doi: 10.1364/OE.18.020759 [20] JOSÉESTEBAN J, GARCÍA A F, EICHHOLZ J, et al.. Ranging and phase measurement for LISA[J]. Journal of Physics:Conference Series, 2010, 228(1):012045. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000001937090 -

 下载:
下载:



图(3)
计量
- 文章访问数: 4880
- HTML全文浏览量: 1940
- PDF下载量: 412
- 被引次数: 0
