


Drag-free control and its application in China's space gravitational wave detection
-
摘要: 无拖曳控制技术通过控制微推力器产生的推力来抵消航天器受到的非保守力,其是获得超静超稳空间实验平台的关键技术之一。首先总结了无拖曳控制技术的研究现状与发展趋势,系统地总结了国外历次无拖曳航天器控制系统的详细设计方案以及国内的研究进展,随后分析了无拖曳控制技术的特点以及所面临的挑战,并概括了无拖曳控制所涉及到的关键技术。最后针对我国空间引力波探测对无拖曳控制技术的需求做了详细的分析与展望。Abstract: Drag-free control technology counteracts non-conservative forces that act on a spacecraft by controlling thrust generated by micro-thrusters. It is among the key technologies for obtaining an ultra-quiet and ultra-stable space experimental platform. Firstly, the status of current research and the development trends of drag-free control technologies both abroad and within China are summarized. Then the characteristics and challenges of drag-free control technologies are analyzed and the key technologies involved in drag-free control are summarized. Finally, analysis and prospection are provided for applications of drag-free control technologies in China's space gravitational wave detection.
-

图 3 “GP-B”位移模式无拖曳控制系统
Figure 3. Drag-free control system with "GP-B" displacement mode

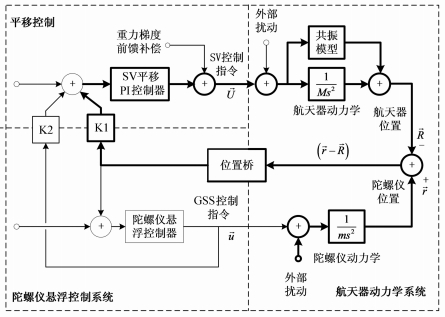
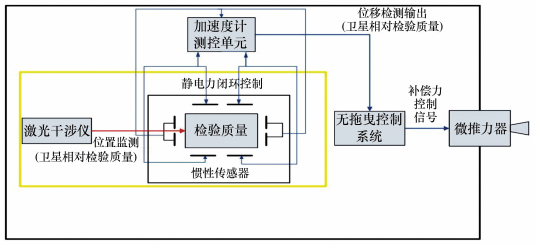
图 4 “GP-B”加速度计模式无拖曳控制系统
Figure 4. Drag-free control system with "GP-B" accelerometer mode

图 5 GOCE卫星无拖曳与姿态控制框图
Figure 5. Block diagram of the drag-free and attitude control of GOCE

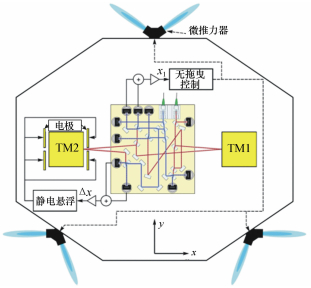
图 7 LPF检验质量和航天器坐标系和变量定义
Figure 7. Test masses, spacecraft coordinate and variable definition of LPF

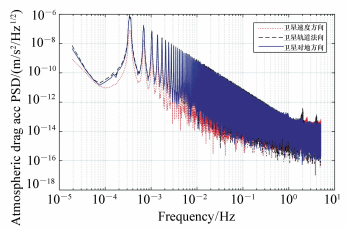
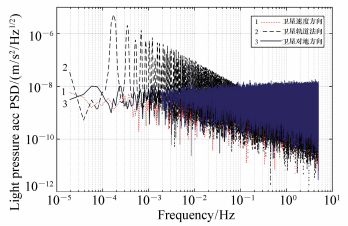
图 9 600 km轨道太阳光压扰动加速度功率谱噪声
Figure 9. Spectral density noise of disturbance acceleration sun pressure at 600 km
表 1 检验质量的分类
Table 1. Classification of test mass
形状 代表卫星 稳定模式 优点 球形 GPB 自旋稳定 自旋稳定,消除球度不规则引起的观测误差 圆柱形 STEP 自旋稳定 自旋稳定,消除圆度不规则引起的观测误差 方形 LPF 三轴稳定 自由度分离,便于控制  下载: 导出CSV
下载: 导出CSV
表 2 无拖曳控制微推力器
Table 2. Micro-thruster with drag-free control
推力器 代表卫星 推力范围 推力噪声 离子微推形 GOCE 几微牛~几百毫牛 几十微牛 冷气微推 Trial I 几微牛~几十毫牛 0.1~几十微牛 微胶体微推 LPF 几微牛~几十微牛 0.1微牛 场发射微推 LPF 几微牛~几十微牛 0.1微牛
下载: 导出CSV
-
[1] 胡明, 李洪银, 周泽兵.无拖曳控制技术及其应用[J].载人航天, 2013, 19(2):61-69. doi: 10.3969/j.issn.1674-5825.2013.02.010HU M, LI H Y, ZHOU Z B. Drag-free control technology and its applications[J]. Manned Spaceflight, 2013, 19(2):61-69.(in Chinese) doi: 10.3969/j.issn.1674-5825.2013.02.010 [2] 刘志国, 朴云松, 乔从丰.多波段引力波宇宙研究和空间太极计划[J].现代物理知识, 2016, 28(5):28-33. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xdwlzc201605006LIU ZH G, PIAO Y S, QIAO C F. Research on multi-band gravitational wave universe and "Taiji" plan[J]. Modern Physics, 2016, 28(5):28-33.(in Chinese) http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xdwlzc201605006 [3] 施梨, 曹喜滨, 张锦绣, 等.无阻力卫星发展现状[J].宇航学报, 2010, 31(6):1511-1520. doi: 10.3873/j.issn.1000-1328.2010.06.001SHI L, CAO X B, ZHANG J X, et al.. Survey of drag-free satellite[J]. Journal of Astronautics, 2010, 31(6):1511-1520.(in Chinese) doi: 10.3873/j.issn.1000-1328.2010.06.001 [4] 邹奎, 苟兴宇, 薛大同.重力梯度测量卫星无拖曳控制技术[J].空间控制技术与应用, 2017, 43(2):28-35. doi: 10.3969/j.issn.1674-1579.2017.02.005ZOU K, GOU X Y, XUE D T. An overview on drag-free control for gravitational gradiometry satellites[J]. Aerospace Control and Application, 2017, 43(2):28-35.(in Chinese) doi: 10.3969/j.issn.1674-1579.2017.02.005 [5] LANGE B. The drag-free satellite[J]. AIAA Journal, 1964, 2(9):1590-1606. doi: 10.2514/3.55086 [6] LANGE B. The control and use of drag-free satellites[D]. Stanford California: Stanford University, 1964. [7] Staff of the Space Department, Staff of the Guidance, Control Laboratory. A satellite freed of all but gravitational forces:"Triad I"[J]. Journal of Spacecraft and Rockets, 1974, 11(9):637-644. doi: 10.2514/3.62146 [8] BUCHMAN S, EVERITT C W F, PARKINSON B, et al.. The gravity probe B relativity mission[J]. Advances in Space Research, 2000, 25(6):1177-1180. doi: 10.1016/S0273-1177(99)00982-5 [9] BENCZE W J, DEBRA D B, HERMAN L, et al.. On-orbit performance of the Gravity Probe B drag-free translation control system[C]. Proceedings of the 29th AAS Guide Control. American Astronautical Society, 2006. [10] CANUTO E, MOLANO A, MASSOTTI L. Drag-free control of the GOCE satellite:noise and observer design[J]. IEEE Transactions on Control Systems Technology, 2010, 18(2):501-509. doi: 10.1109/TCST.2009.2020169 [11] SECHI G, BUONOCORE M, COMETTO F, et al.. In-flight results from the drag-free and attitude control of GOCE satellite[J]. IFAC Proceedings Volumes, 2011, 44(1):733-740. doi: 10.3182/20110828-6-IT-1002.02966 [12] CANUTO E, MASSOTTI L. All-propulsion design of the drag-free and attitude control of the European satellite GOCE[J]. Acta Astronautica, 2009, 64(2-3):325-344. doi: 10.1016/j.actaastro.2008.07.017 [13] GHISI C E, STEIGER C, ROMANAZZO M, et al.. Drag-free attitude and orbit control system performance of ESA's GOCE mission during low orbit operations and de-orbiting[C]. Proceedings of Space Operations: Innovations, Inventions, and Discoveries, Progress in Astronautics and Aeronautics, AIAA, 2014: 461-487. [14] EVERS W J. GOCE dynamical analysis and drag free mode control[R]. Eindhoven: Technische Universiteit Eindhoven, 2004. [15] ARMANO M, AUDLEY H, AUGER G, et al.. Free-flight experiments in LISA Pathfinder[J]. Journal of Physics:Conference Series, 2015, 610(1):012006. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Arxiv000001238814 [16] PRADELS G, TOUBOUL P. In-orbit calibration approach of the MICROSCOPE experiment for the test of the equivalence principle at 10-15[J]. Classical and Quantum Gravity, 2003, 20(13):2677-2688. doi: 10.1088/0264-9381/20/13/315 [17] CHHUN R, RODRIGUES M, TOUBOUL P. Microscope mission and performance[J]. Nuclear Physics B-Proceedings Supplements, 2002, 113(1-3):277-281. doi: 10.1016/S0920-5632(02)01852-2 [18] EISNER A, YUHASZ R. A flight evaluation of the DISCOS system on the TRIAD satellite[R]. JHU/APL TG-1216, Silver Spring: The Johns Hopkins Univ., Applied Physics Lab., 1973. [19] LI J, BENCZE W J, DEBRA D B, et al.. On-orbit performance of gravity probe B drag-free translation control and orbit determination[J]. Advances in Space Research, 2007, 40(1):1-10. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=2115ab801fa181bc5d6eab66962a9ec7 [20] ARMANO M, AUDLEY H, AUGER G, et al.. Sub-femto-g free fall for space-based gravitational wave observatories:LISA pathfinder results[J]. Physical Review Letters, 2016, 116(23):231101. doi: 10.1103/PhysRevLett.116.231101 [21] FICHTER W, GATH P, VITALE S, et al.. LISA Pathfinder drag-free control and system implications[J]. Classical and Quantum Gravity, 2005, 22(10):S139-S148. doi: 10.1088/0264-9381/22/10/002 [22] ARMANO M, AUDLEY H, BAIRD J, et al.. Beyond the required LISA free-fall performance:new LISA pathfinder results down to 20 μHz[J]. Physical Review Letters, 2018, 120(6):061101. doi: 10.1103/PhysRevLett.120.061101 [23] FICHTER W, SCHLEICHER A, BENNANI S, et al.. Closed loop performance and limitations of the LISA pathfinder drag-free control system[C]. Proceedings of AIAA Guidance, Navigation and Control Conference and Exhibit, AIAA, 2007. [24] 王世华, 陈秀玲, 徐淦.利用三光束激光干涉仪评估纳米平台的移动性能[J].光学 精密工程, 2011, 19(9):2284-2292. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201109040WANG SH H, CHEN X L, XU G. Evaluation of nano-stage movement by using triple-beam laser interferometer[J]. Opt. Precision Eng., 2011, 19(9):2284-2292.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201109040 [25] 罗子人, 白姗, 边星, 等.空间激光干涉引力波探测[J].力学进展, 2013, 43(4):415-447. http://d.old.wanfangdata.com.cn/Periodical/twxjz201501004LUO Z R, BAI SH, BIAN X, et al.. Gravitational wave detection by space laser interferometry[J]. Advances in Mechanics, 2013, 43(4):415-447.(In Chinese) http://d.old.wanfangdata.com.cn/Periodical/twxjz201501004 [26] 王智, 沙巍, 陈哲, 等.空间引力波探测望远镜初步设计与分析[J].中国光学, 2018, 11(1):131-151. http://www.chineseoptics.net.cn/CN/abstract/abstract9549.shtmlWANG ZH, SHA W, CHEN ZH, et al.. Preliminary design and analysis of telescope for space gravitational wave detection[J]. Chinese Optics, 2018, 11(1):131-151.(in Chinese) http://www.chineseoptics.net.cn/CN/abstract/abstract9549.shtml [27] DEBRA D B. Drag-free spacecraft as platforms for space missions and fundamental physics[J]. Classical and Quantum Gravity, 1997, 14(6):1549-1555. doi: 10.1088/0264-9381/14/6/026 [28] SPEAKE C C, ANDREWS P L. Capacitive sensing for drag-free satellites[J]. Classical and Quantum Gravity, 1997, 14(6):1557-1565. doi: 10.1088/0264-9381/14/6/027 [29] WEBER W J, CAVALLERI A, DOLESI R, et al.. Position sensors for LISA drag-free control[J]. Classical and Quantum Gravity, 2002, 19(7):1751-1756. doi: 10.1088/0264-9381/19/7/371 [30] CLAVIER O H. Development of a superconducting position sensor for the satellite test of the equivalence principle[D]. Stanford: Stanford University, 2001. [31] KÖHLER J, BEJHED J, KRATZ H, et al.. A hybrid cold gas microthruster system for spacecraft[J]. Sensors and Actuators A:Physical, 2002, 97-98:587-598. doi: 10.1016/S0924-4247(01)00805-6 [32] ZIEMER J, MERKOWITZ S. Microthrust propulsion for the LISA mission[C]. Proceedings of the 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, AIAA, 2004. [33] MERKOWITZ S M, MAGHAMI P G, SHARMA A, et al.. A μNewton thrust-stand for LISA[J]. Classical and Quantum Gravity, 2002, 19(7):1745-1750. doi: 10.1088/0264-9381/19/7/370 [34] NICOLINI D, DEL AMO J G, SACCOCCIA G. Plasma measurements in the ESA electric propulsion laboratory[C]. Proceedings of the 7th Spacecraft Charging Technology Conference, European Space Agency, 2001: 389-394. [35] HAINES A R. Development of a drag-free control system[C]. Processing of the 14th Annual AIAA/USU conference on small satellite, AIAA, 2000. [36] LEACH R. Development of hardware for a drag-free control system[J]. Proceedings of SPIE, 2003, 4856:19-31. doi: 10.1117/12.458567 [37] 李传江, 王玉爽, 马广富, 等.带卡尔曼估计器的无拖曳卫星干扰补偿控制[J].哈尔滨工业大学学报, 2012, 44(7):8-13. http://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201207003.htmLI CH J, WANG Y SH, MA G F, et al.. Disturbance compensation control for drag-free satellite with Kalman estimator[J]. Journal of Harbin Institute of Technology, 2012, 44(7):8-13.(in Chinese) http://www.cnki.com.cn/Article/CJFDTOTAL-HEBX201207003.htm [38] CANUTO E. Embedded model control:outline of the theory[J]. ISA Transactions, 2007, 46(3):363-377. doi: 10.1016/j.isatra.2007.01.006 [39] CANUTO E. Drag-free and attitude control for the GOCE satellite[J]. Automatica, 2008, 44(7):1766-1780. doi: 10.1016/j.automatica.2007.11.023 -

 下载:
下载:





计量
- 文章访问数: 4750
- HTML全文浏览量: 1777
- PDF下载量: 339
- 被引次数: 0
