


-
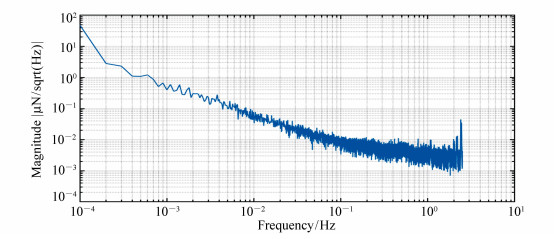
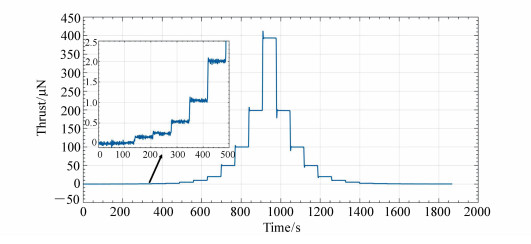
摘要: 空间引力波探测任务需要具有亚微牛级推力分辨率和推力噪声的微推力器来实现卫星平台高精度无拖曳控制任务,为了在地面对所需微推力器的推力进行标定,设计并研制了一套基于扭摆的亚微牛级推力测量系统。该系统选用高精度、高分辨率电容式位移传感器作为扭摆角位移传感装置,利用高精度电子天平对静电梳进行标定,再利用该静电梳标定扭摆,得到推力与角位移的关系。此外,研究了高精度弱力标定技术和亚微牛级微推力在线测量技术,分析了测量误差来源以及控制方案,最后利用静电梳产生标准弱力测量扭摆推力分辨能力和范围等。实验结果表明:该系统可测推力范围为0~400 μN,分辨率达到0.1 μN,背景噪声功率谱密度优于0.1 μN/
-
Key words:
- gravitational wave /
- torsion balance /
- micro thrust /
- measurement of weak force
-

图 7 温度变化与产生的结构变形之间的关系
Figure 7. Relationship between temperature changes and structural deformation
表 1 弱力测量结果
Table 1. Measurement results of the weak force generator
测量项目 测量数据 实测电压/V 0 35.03 215.8 296.13 366.42 426.65 476.84 516.96 557.14 597.28 质量(10 μg) 0 14 525 990 1 516 2 055 2 567 3 018 3 505 4 029 实测电压/V 627.42 667.54 707.68 737.83 767.91 798.06 818.16 848.26 878.42 898.45 质量(10 μg) 4 445 5 032 5 556 6 147 6 659 7 192 7 560 8 125 8 714 9 116  下载: 导出CSV
下载: 导出CSV
-
[1] 萨顿G P, 比布拉兹O.火箭发动机基础[M].洪鑫, 张宝炯, 译.北京: 科学出版社, 2003.SUTTON G P, BIBLARZ O. Rocket Engine Foundation[M]. HONG X, ZHANG B J, trans. Beijing: Science Press, 2003.(in Chinese) [2] 韩先伟.微波等离子推力器真空实验研究与卫星应用探索[D].西安: 西北工业大学, 2002. http://cdmd.cnki.com.cn/Article/CDMD-10699-2003101467.htmHAN X W. Vacuum experiment research of microwave plasma thruster and application probe of geosynchronous satellite[D]. Xi'an: Northwestern Polytechnical University, 2002.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10699-2003101467.htm [3] 方元坤, 袁斌文, 孟子阳, 等.分布式遥感编队多星协同观测中的姿态控制[J].光学 精密工程, 2019, 27(1):58-68. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201901008FANG Y K, YUAN B W, MENG Z Y, et al.. Attitude control in multi-satellite cooperative observations for distributed remote sensing[J]. Opt. Precision Eng., 2019, 27(1):58-68.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201901008 [4] 贺建武.射频离子微推力器工作机理及性能优化研究[D].北京: 中国科学院大学, 2017.HE J W. Researches on working mechanism and performance optimization of radio-frequency ion microthruster[D]. Beijing: University of the Chinese Academy of Sciences, 2017.(in Chinese) [5] 洪延姬, 周伟静, 王广宇.微推力测量方法及其关键问题分析[J].航空学报, 2013, 34(10):2287-2299. http://d.old.wanfangdata.com.cn/Periodical/hkxb201310005HONG Y J, ZHOU W J, WANG G Y. Methods of microthrust measurement and analysis of its key issues[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(10):2287-2299.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/hkxb201310005 [6] 赵凤鸣.基于扭秤的弱力测量的初步分析和校验[D].沈阳: 东北大学, 2013: 14. http://cdmd.cnki.com.cn/Article/CDMD-10145-1015707476.htmZHAO F M. Based on the weak-force torsion balance measurements preliminary analysis and verification[D]. Shenyang: Northeastern University, 2013: 14.(in Chinese) http://cdmd.cnki.com.cn/Article/CDMD-10145-1015707476.htm [7] 汤海滨, 刘畅, 向民, 等.微推力全弹性测量装置[J].推进技术, 2007, 28(6):703-706. doi: 10.3321/j.issn:1001-4055.2007.06.024TANG H B, LIU CH, XIANG M, et al.. Full elastic microthrust measurement equipment[J]. Journal of Propulsion Technology, 2007, 28(6):703-706.(in Chinese) doi: 10.3321/j.issn:1001-4055.2007.06.024 [8] EDAMITSU T, TAHARA H. Performance measurement and flowfield calculation of an electrothermal pulsed plasma thruster with a propellant feeding mechanism[C]. Proceedings of the 29th International Electric Propulsion Conference, 2005. [9] 杨娟, 刘宪闯, 王与权, 等.微波推力器独立系统的三丝扭摆推力测量[J].推进技术, 2016, 37(2):362-371. http://d.old.wanfangdata.com.cn/Periodical/tjjs201602022YANG J, LIU X CH, WANG Y Q, et al.. Thrust measurement of an independent microwave thruster propulsion device with three-wire torsion pendulum thrust measurement system[J]. Journal of Propulsion Technology, 2016, 37(2):362-371.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tjjs201602022 [10] NAGAO N, YOKOTA S, KOMURASAKI K, et al.. Development of a two-axis dual pendulum thrust stand for thrust vector measurement of hall thrusters[C]. Proceedings of the 30th International Electric Propulsion Conference, 2007. [11] PACKAN D, BONNET J, ROCCA S. Thrust measurements with the ONERA micronewton balance[C]. Proceedings of the 30th International Electric Propulsion Conference, 2007. [12] NEUNZIG O, DROBNY C, TAJMAR M. Development of a compact milli-newton thrust balance and characterization of a miniature hall-effect thruster[C]. Proceedings of the 35th International Electric Propulsion Conference, Georgia, USA, 2017. [13] 马隆飞, 贺建武, 薛森文, 等.双丝扭秤微推力测量系统[J].推进技术, 2018, 39(4):948-954. http://d.old.wanfangdata.com.cn/Periodical/tjjs201804029MA L F, HE J W, XUE S W, et al.. A microthrust measurement system with two-wire torsion balance[J]. Journal of Propulsion Technology, 2018, 39(4):948-954.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tjjs201804029 [14] 姚东, 李钰鹏, 赵亚, 等.适用于光黏工艺的干涉仪公差保证方法[J].光学 精密工程, 2018, 26(8):1945-1953. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201808015YAO D, LI Y P, ZHAO Y, et al.. Tolerance assurance of interferometer for optical HCB process[J]. Opt. Precision Eng., 2018, 26(8):1945-1953.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201808015 [15] 刘旭辉, 杨飞虎, 魏延明, 等.基于扭摆台架的动态推力测试方法研究[J].推进技术, 2017, 38(4):925-931. http://d.old.wanfangdata.com.cn/Periodical/tjjs201704025LIU X H, YANG F H, WEI Y M, et al.. Study of dynamic thrust measurement using torsional pendulum[J]. Journal of Propulsion Technology, 2017, 38(4):925-931.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/tjjs201704025 [16] KOLBECK J, PORTER T E, KEIDAR M. High precision thrust balance development at the george washington[C]. Proceedings of the 35th International Electric Propulsion Conference, Georgia, USA, 2017. [17] 葛川, 张德福, 李朋志, 等.电容式位移传感器的线性度标定与不确定度评定[J].光学 精密工程, 2015, 23(9):2546-2552. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201509016GE CH, ZHANG D F, LI P ZH, et al.. Linearity calibration and uncertainty evaluation for capacitance displacement sensor[J]. Opt. Precision Eng., 2015, 23(9):2546-2552.(in Chinese) http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201509016 -

 下载:
下载:


 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 2216
- HTML全文浏览量: 738
- PDF下载量: 229
- 被引次数: 0
