2016年 9卷 第1期
2016, 9(1): 1-15.
doi: 10.3788/CO.20160901.0001
 摘要
摘要 HTML全文
HTML全文 PDF 1608KB
PDF 1608KB
摘要:
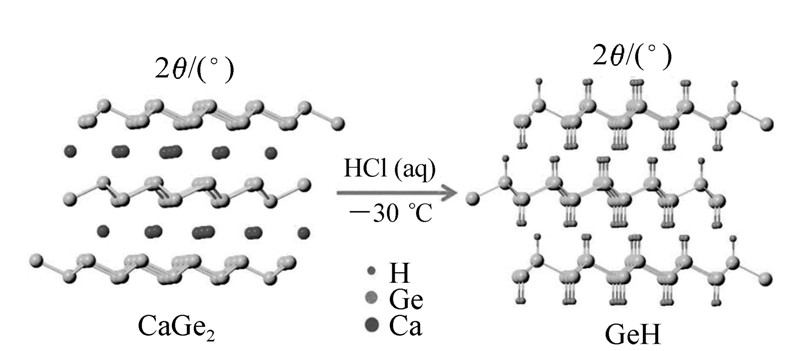
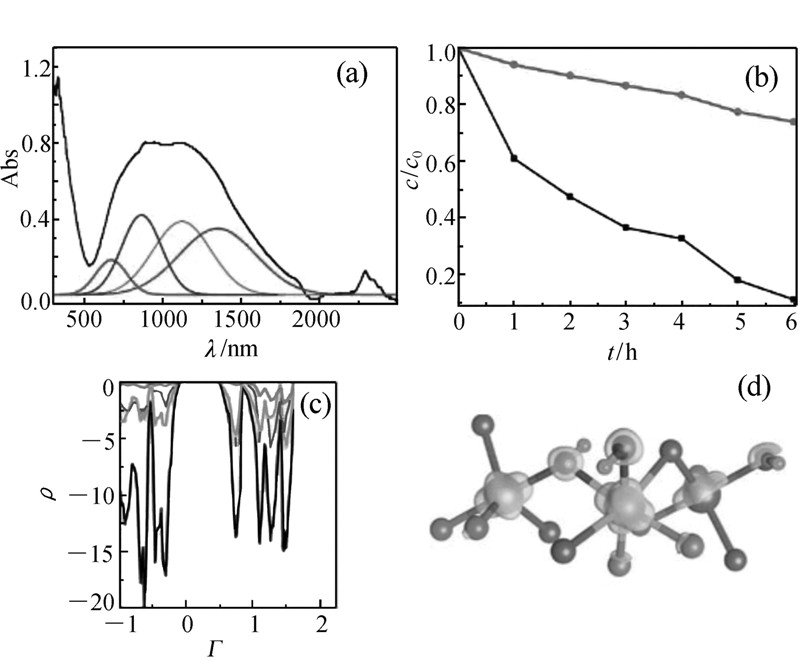
光催化技术在解决能源短缺和环境污染问题方面有重要的应用前景,引起了人们的广泛关注。宽光谱响应和高量子效率是实现光催化材料大规模应用的前提。本文介绍了近年来紫外、可见和近红外光催化方面的最新进展,阐述了拓展光响应范围和促进载流子分离的有效途径,总结了光催化材料发展所面临的问题,并对其发展趋势进行了展望。
光催化技术在解决能源短缺和环境污染问题方面有重要的应用前景,引起了人们的广泛关注。宽光谱响应和高量子效率是实现光催化材料大规模应用的前提。本文介绍了近年来紫外、可见和近红外光催化方面的最新进展,阐述了拓展光响应范围和促进载流子分离的有效途径,总结了光催化材料发展所面临的问题,并对其发展趋势进行了展望。

2016, 9(1): 16-29.
doi: 10.3788/CO.20160901.0016
摘要:
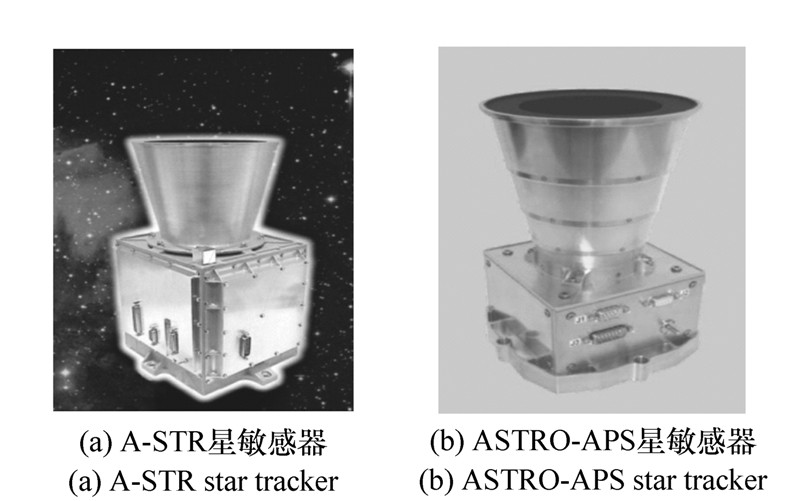
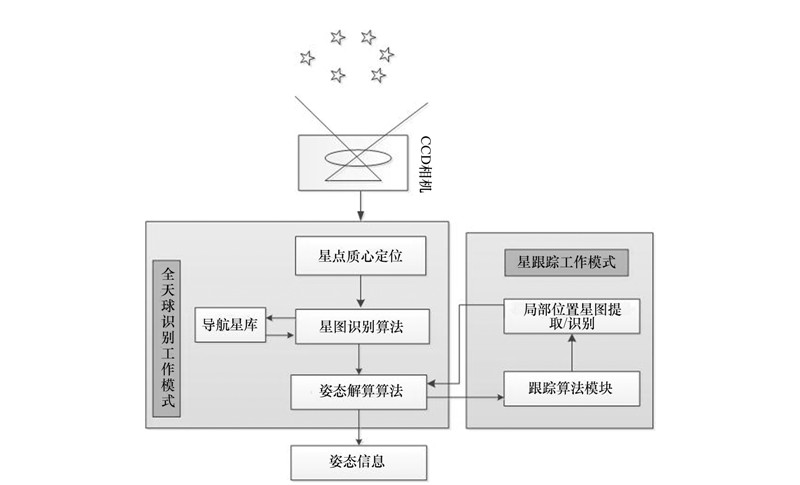
本文综述了星敏感器技术的研究现状和未来发展趋势。首先,总结了国内外星载星敏感器的发展历程。接着,根据星敏感器工作原理,分析讨论了星点质心定位算法、星图识别算法和姿态解算算法等星敏感器关键技术的发展现状。通过讨论星点质心定位精度对星敏感器测量精度影响,分析了星点质心定位算法以及对应误差补偿的研究现状;基于星座特征、字符模式和智能行为,介绍了星图识别算法并进行了对比分析;根据确定姿态解算算法和动态姿态解算算法分析了姿态解算算法的研究现状。最后,对星敏感器的未来发展进行了展望,讨论了航空机载星敏感器、微小型星敏感器和甚高精度星敏感器的发展趋势以及未来重点研究内容。
本文综述了星敏感器技术的研究现状和未来发展趋势。首先,总结了国内外星载星敏感器的发展历程。接着,根据星敏感器工作原理,分析讨论了星点质心定位算法、星图识别算法和姿态解算算法等星敏感器关键技术的发展现状。通过讨论星点质心定位精度对星敏感器测量精度影响,分析了星点质心定位算法以及对应误差补偿的研究现状;基于星座特征、字符模式和智能行为,介绍了星图识别算法并进行了对比分析;根据确定姿态解算算法和动态姿态解算算法分析了姿态解算算法的研究现状。最后,对星敏感器的未来发展进行了展望,讨论了航空机载星敏感器、微小型星敏感器和甚高精度星敏感器的发展趋势以及未来重点研究内容。



2016, 9(1): 30-40.
doi: 10.3788/CO.20160901.0030
摘要:
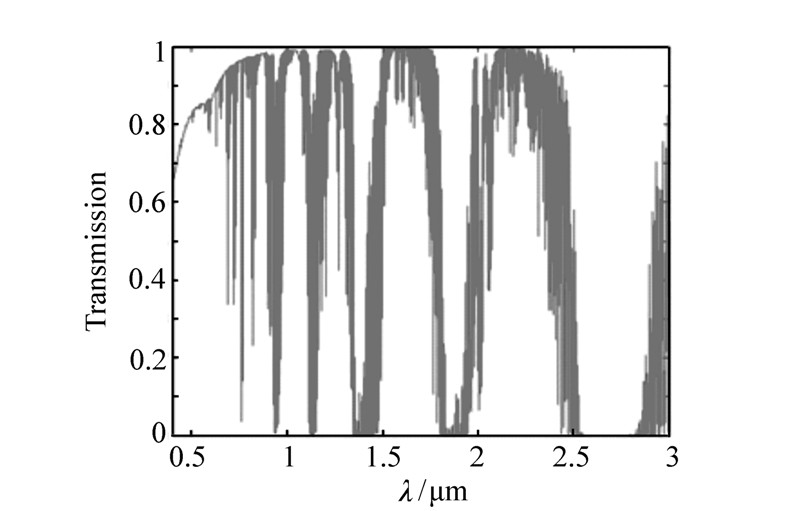
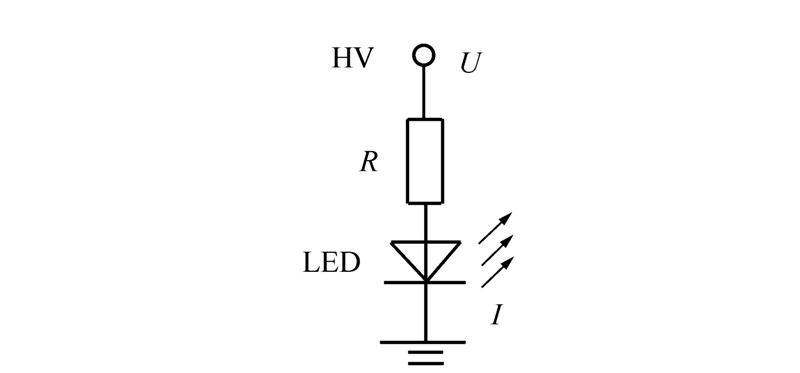
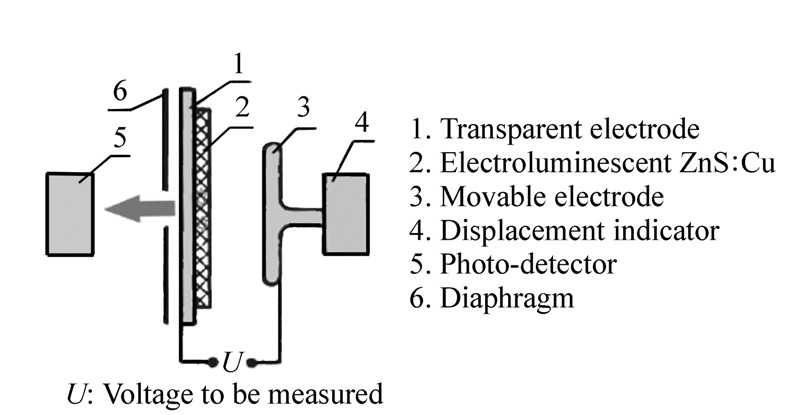
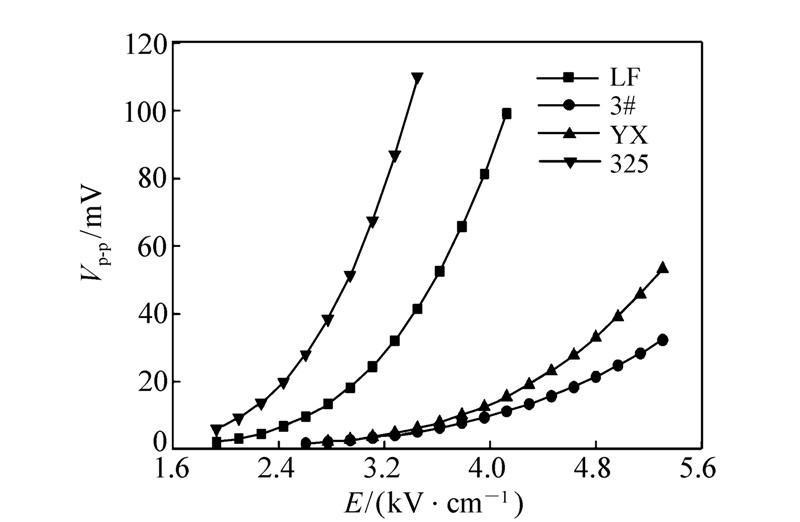
本文综述了基于电致发光效应的光学电压传感器机理、分类及其主要特性,分析总结了此类传感器的研究现状及其存在的主要问题,同时提出未来研究课题的建议。电致发光型电压传感器的主要优点在于不需要载波光源,因而可以有效避免以往光学电压器中工作光源性能不稳定所引起的传感器性能变化;此外,此类电压传感器结构简单、体积小、重量轻、成本低,可以实现较高的性能价格比。今后研究的主要问题包括合理选择电压传感材料与器件、提高传感器的温度和湿度稳定性等。电致发光型电压传感器在电力工业和航空航天等领域的科学研究与实验中将具有广泛的应用前景。
本文综述了基于电致发光效应的光学电压传感器机理、分类及其主要特性,分析总结了此类传感器的研究现状及其存在的主要问题,同时提出未来研究课题的建议。电致发光型电压传感器的主要优点在于不需要载波光源,因而可以有效避免以往光学电压器中工作光源性能不稳定所引起的传感器性能变化;此外,此类电压传感器结构简单、体积小、重量轻、成本低,可以实现较高的性能价格比。今后研究的主要问题包括合理选择电压传感材料与器件、提高传感器的温度和湿度稳定性等。电致发光型电压传感器在电力工业和航空航天等领域的科学研究与实验中将具有广泛的应用前景。





2016, 9(1): 41-50.
doi: 10.3788/CO.20160901.0041
摘要:
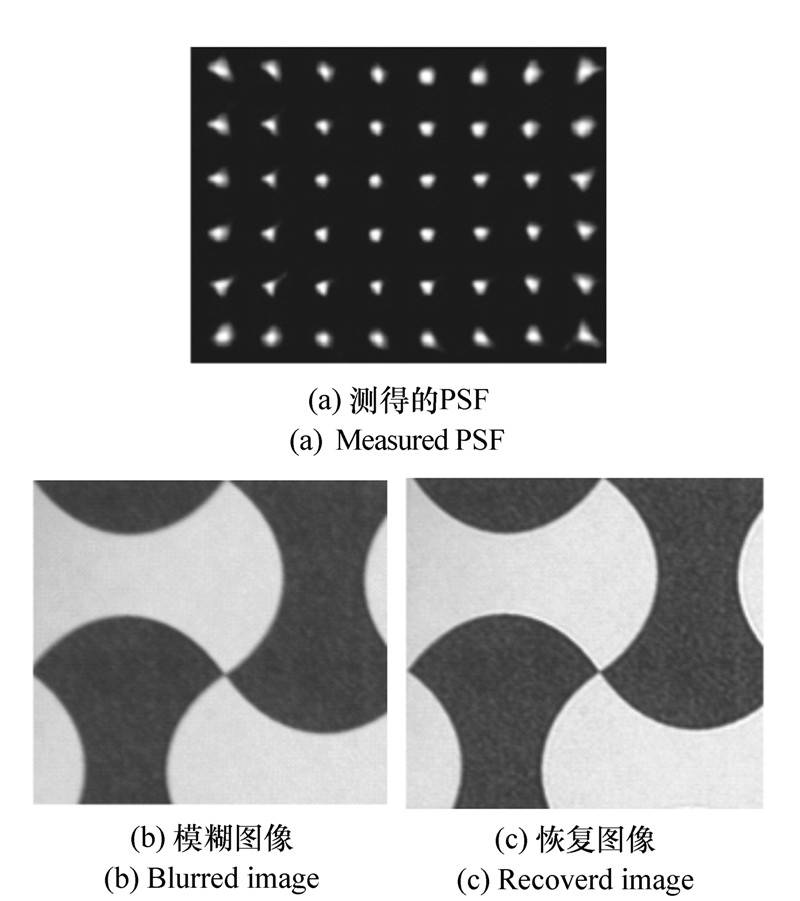
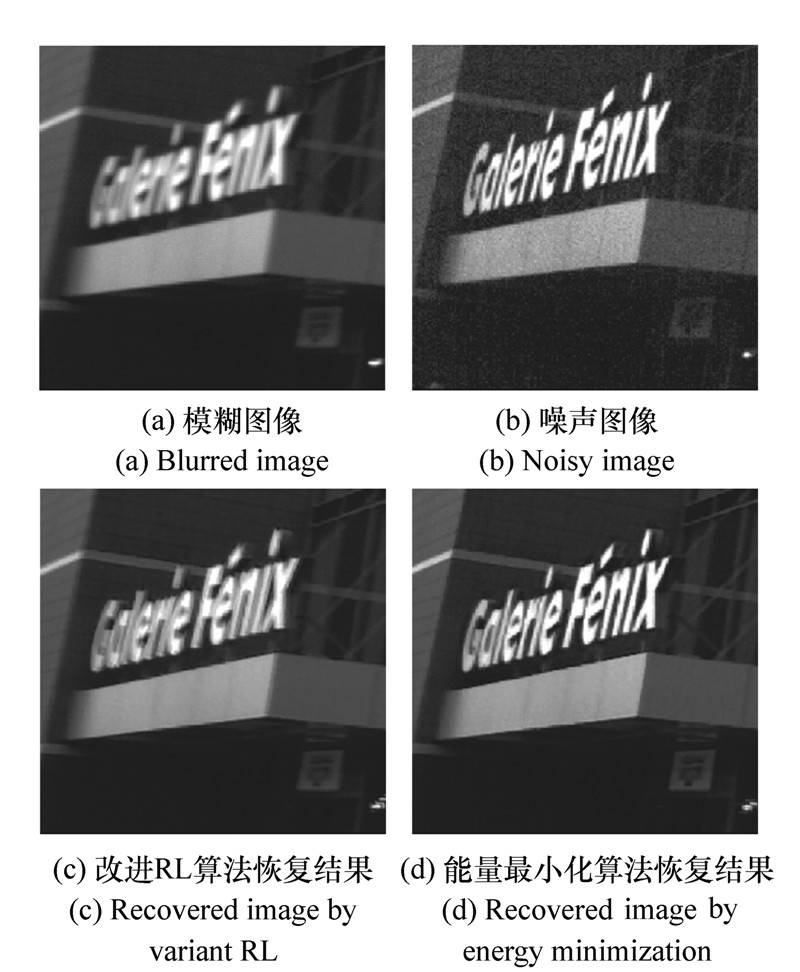
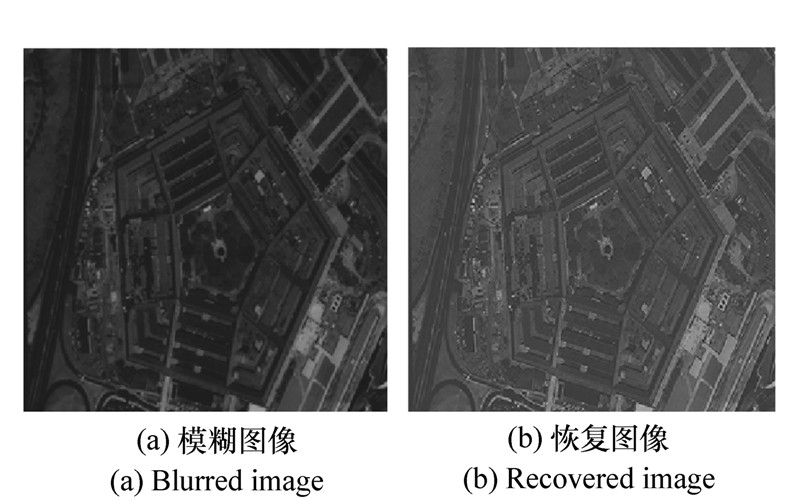
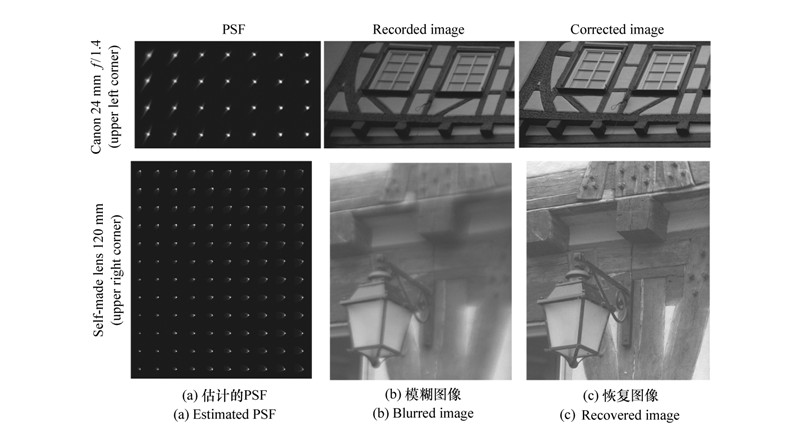
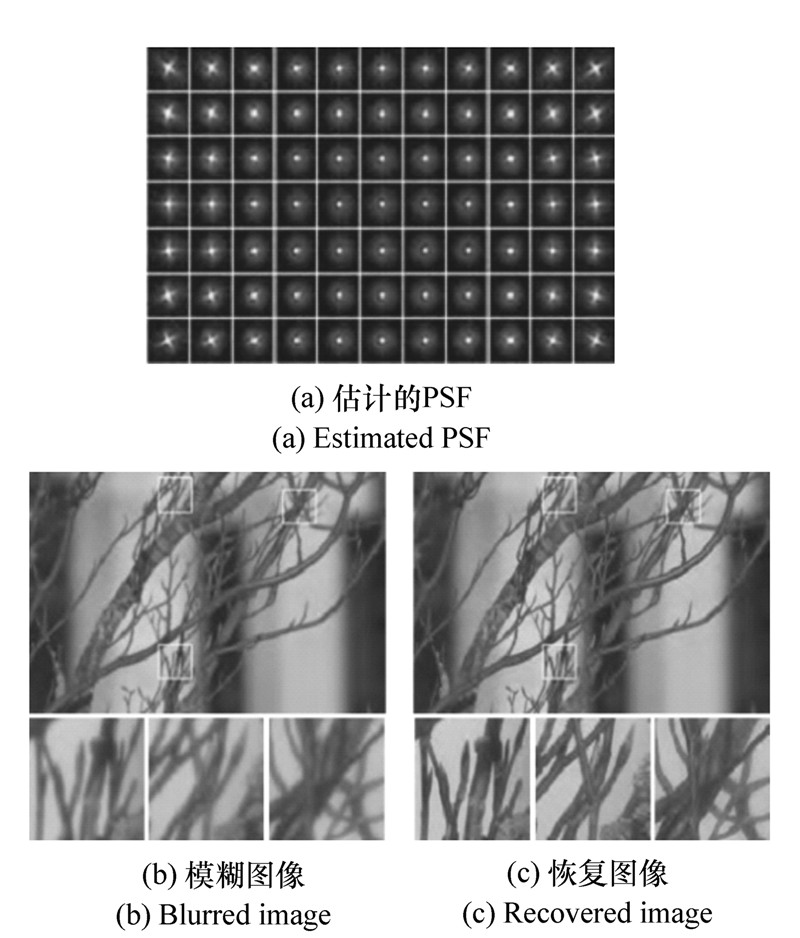
传统的图像复原一般认为点扩散函数(PSF)是空间不变的,实际光学系统由于受到像差等因素的影响,并非严格的线性空间不变系统,基于空间变化PSF的非盲去卷积图像复原法逐渐体现其优越性。空间变化PSF的非盲去卷积图像复原法先准确估计图像空间变化的PSF,再利用非盲去卷积算法对图像进行复原,有利于恢复出高质量图像。本文从算法的角度综述了近几年提出的基于空间变化PSF的非盲去卷积图像复原方法,并对比了基于强边缘预测估计PSF的非盲去卷积法、基于模糊噪声图像对PSF估计非盲去卷积法等算法的优缺点,各算法分别在PSF估计精确度、振铃效应抑制效果、适用范围等方面体现出各自的优劣。空间变化PSF的非盲去卷积图像复原法的研究,有利于推进图像复原技术向更高水平发展,使光学系统往轻小型化方向发展,从而在多个科学领域发挥其重要作用。
传统的图像复原一般认为点扩散函数(PSF)是空间不变的,实际光学系统由于受到像差等因素的影响,并非严格的线性空间不变系统,基于空间变化PSF的非盲去卷积图像复原法逐渐体现其优越性。空间变化PSF的非盲去卷积图像复原法先准确估计图像空间变化的PSF,再利用非盲去卷积算法对图像进行复原,有利于恢复出高质量图像。本文从算法的角度综述了近几年提出的基于空间变化PSF的非盲去卷积图像复原方法,并对比了基于强边缘预测估计PSF的非盲去卷积法、基于模糊噪声图像对PSF估计非盲去卷积法等算法的优缺点,各算法分别在PSF估计精确度、振铃效应抑制效果、适用范围等方面体现出各自的优劣。空间变化PSF的非盲去卷积图像复原法的研究,有利于推进图像复原技术向更高水平发展,使光学系统往轻小型化方向发展,从而在多个科学领域发挥其重要作用。

2016, 9(1): 51-64.
doi: 10.3788/CO.20160901.0051
摘要:
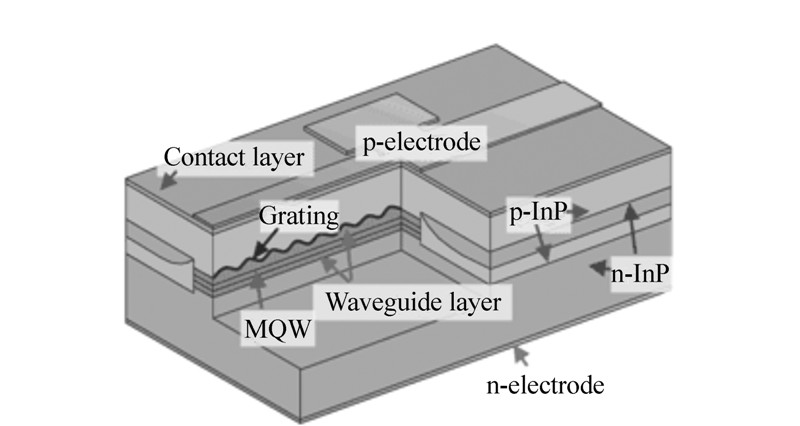
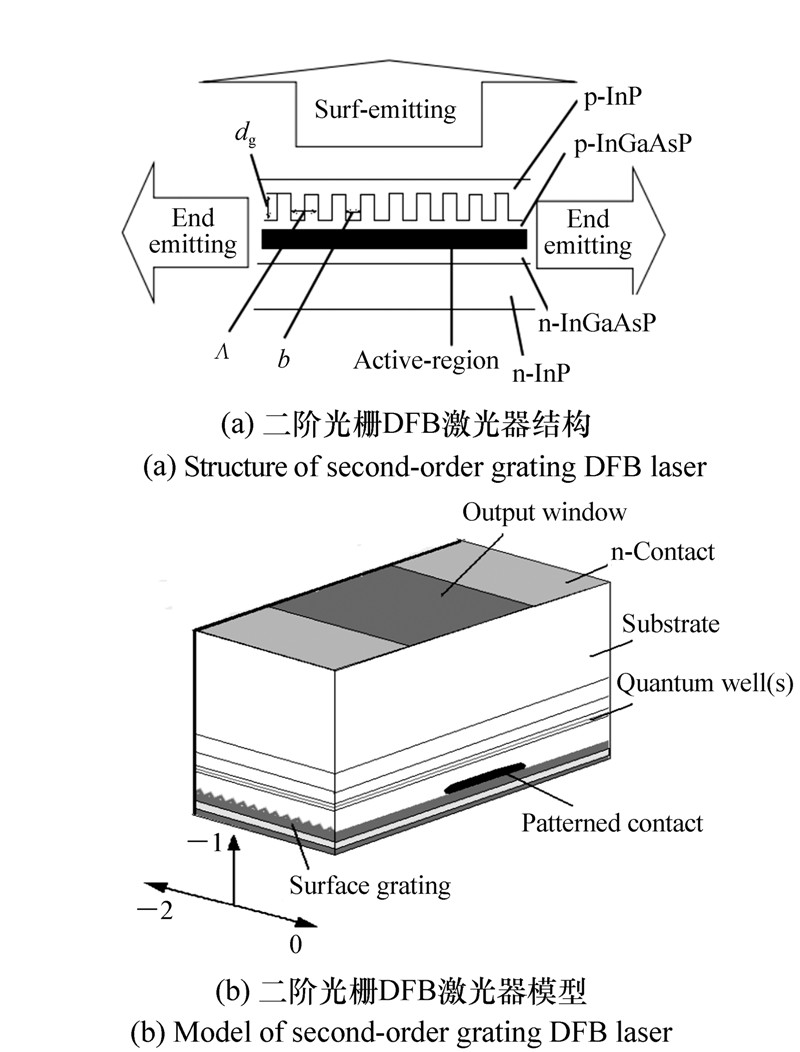
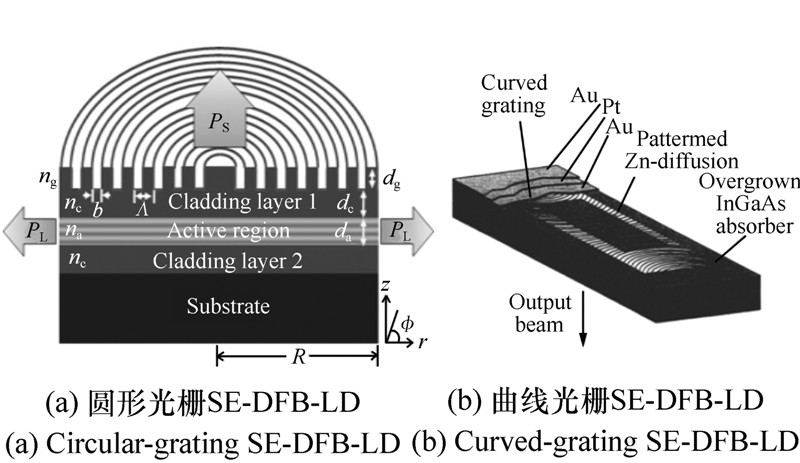
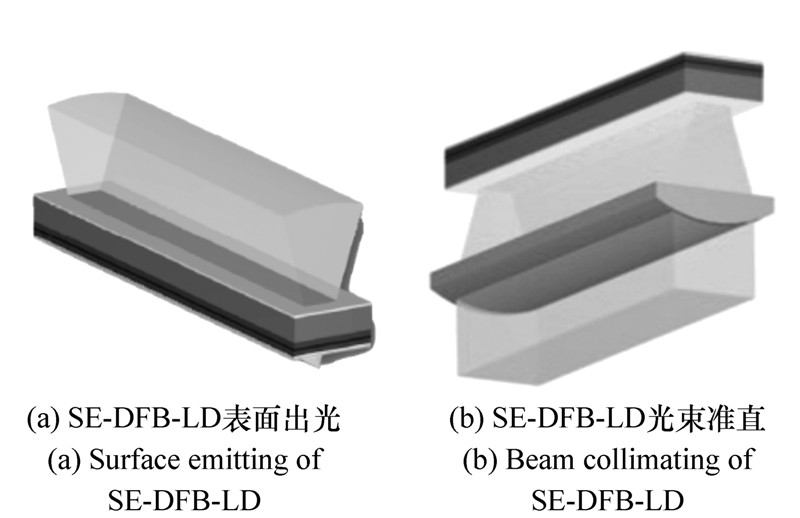
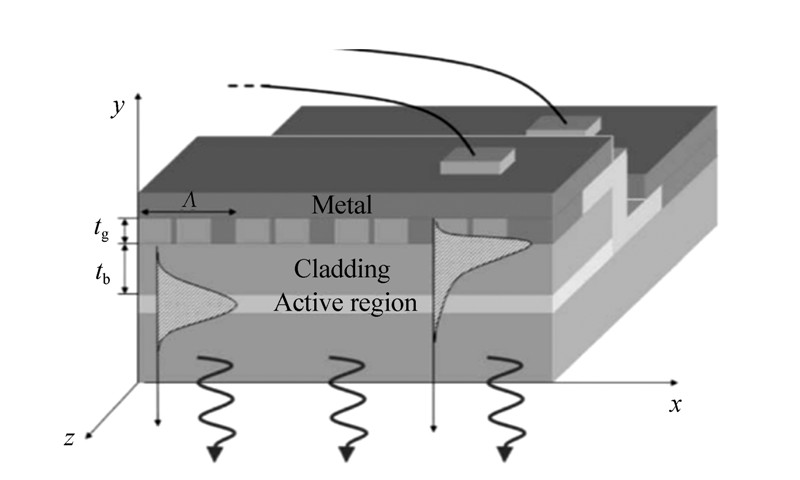
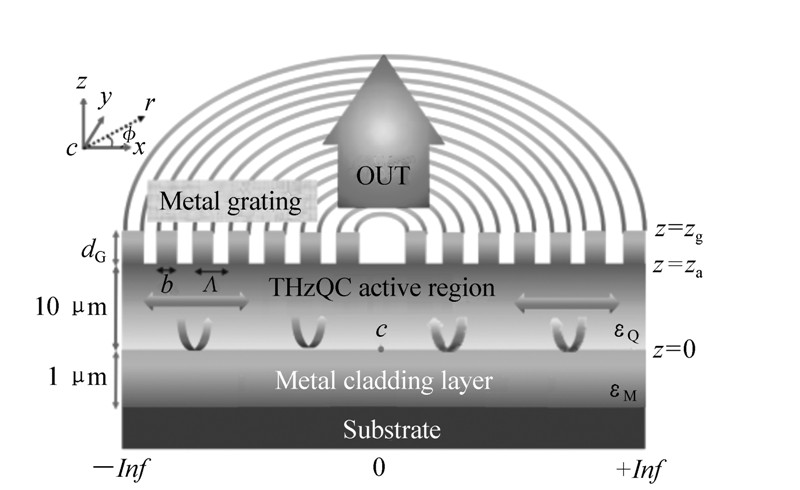
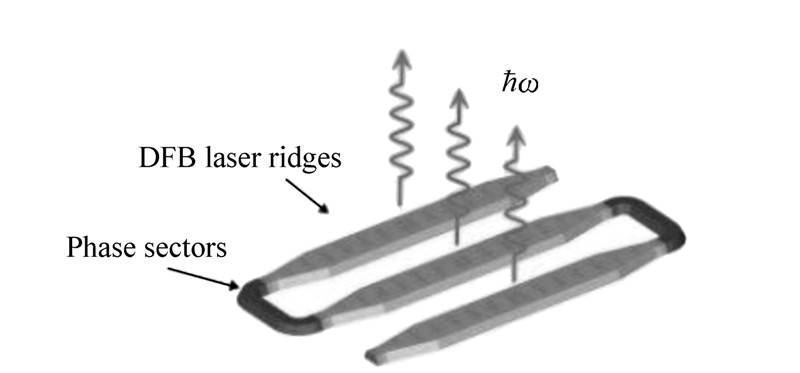
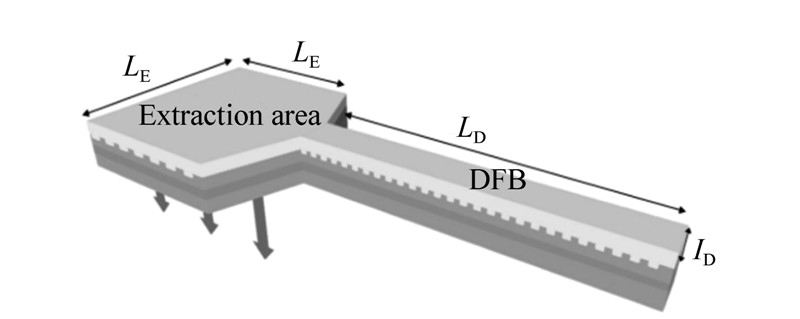
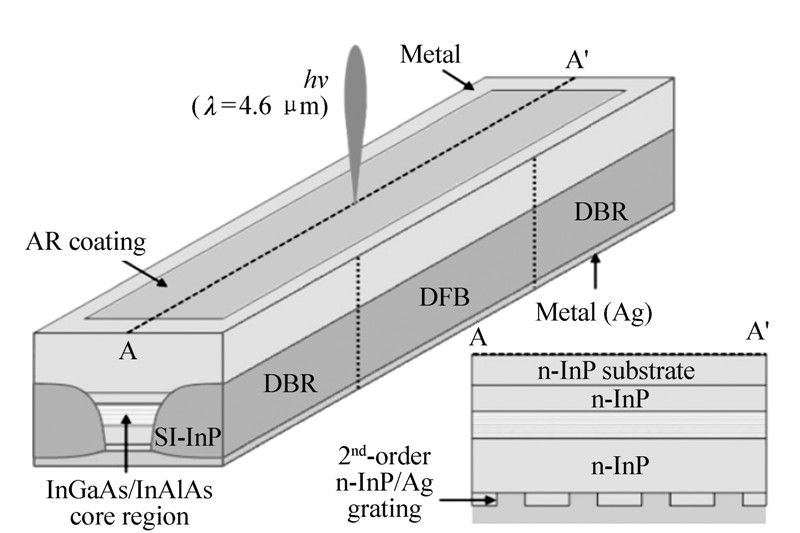
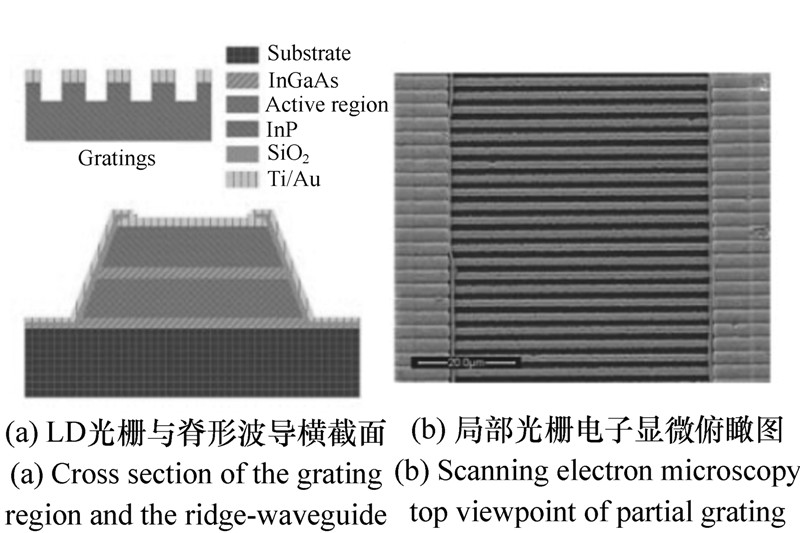
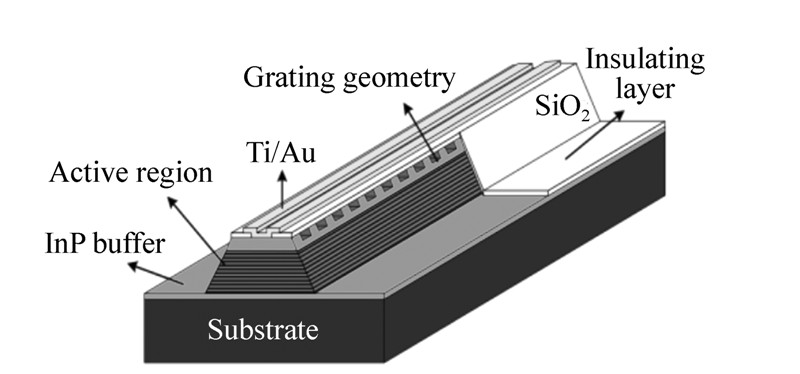
本文详细阐述了面发射分布反馈半导体激光器(SE-DFB-LD)的基本工作原理、结构设计及其工作性能,针对国内外研究最新进展与发展现状进行了总结和评述,并在此基础上,对面发射半导体激光器的研究工作和发展趋势做出了进一步的讨论和展望。随着面发射分布反馈半导体激光器各性能指标的不断优化提升和后期加工、装调技术的逐渐成熟,其将不断满足科学研究及工业、军事等实际应用领域对半导体激光器的需求,具有很大的发展潜力。
本文详细阐述了面发射分布反馈半导体激光器(SE-DFB-LD)的基本工作原理、结构设计及其工作性能,针对国内外研究最新进展与发展现状进行了总结和评述,并在此基础上,对面发射半导体激光器的研究工作和发展趋势做出了进一步的讨论和展望。随着面发射分布反馈半导体激光器各性能指标的不断优化提升和后期加工、装调技术的逐渐成熟,其将不断满足科学研究及工业、军事等实际应用领域对半导体激光器的需求,具有很大的发展潜力。






2016, 9(1): 65-73.
doi: 10.3788/CO.20160901.0065
摘要:
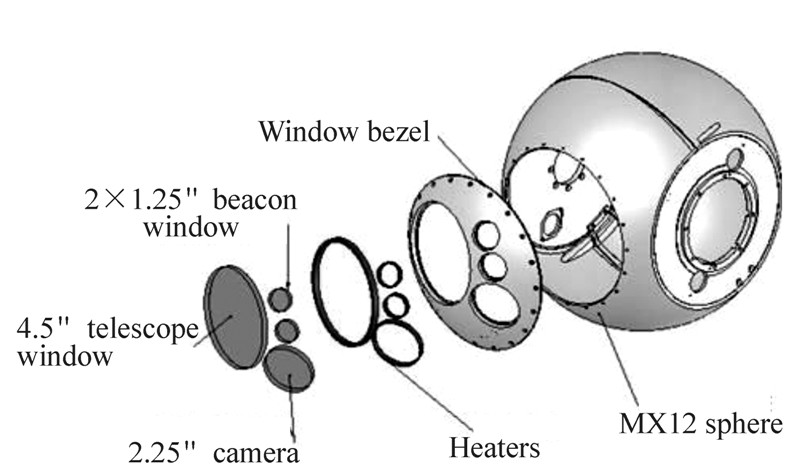
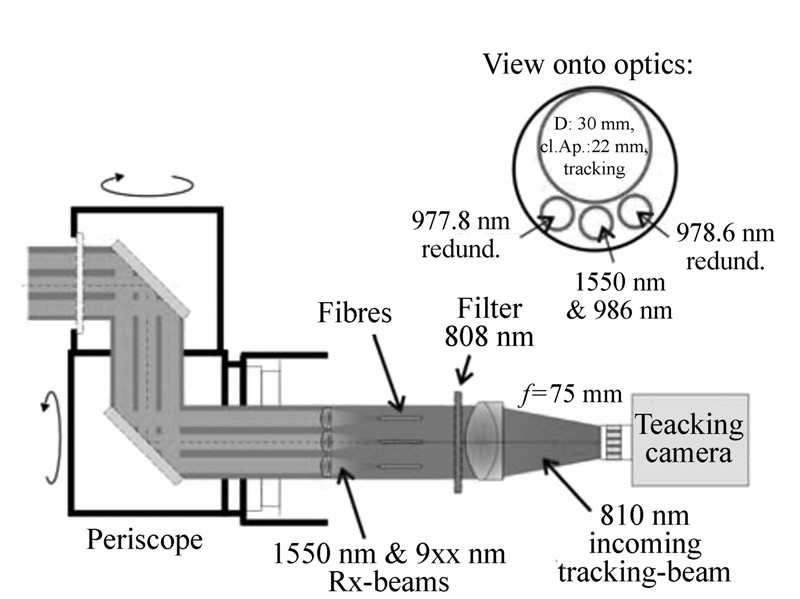
本文首先介绍了激光通信的突出地位和重大成果,说明机载激光通信技术的先进性和重要性。然后阐明了机载激光通信系统的工作原理,说明进行机载激光通信研究的可行性。接着简要叙述了机载激光通信系统的发展历史和国内外研究现状,重点对其性能指标和技术特点进行了分析。在此基础上,提出了机载激光通信的关键技术,并指出其应用前景和发展趋势。在不久的未来,机载激光通信将会成为信息化战争必不可少的通信手段。
本文首先介绍了激光通信的突出地位和重大成果,说明机载激光通信技术的先进性和重要性。然后阐明了机载激光通信系统的工作原理,说明进行机载激光通信研究的可行性。接着简要叙述了机载激光通信系统的发展历史和国内外研究现状,重点对其性能指标和技术特点进行了分析。在此基础上,提出了机载激光通信的关键技术,并指出其应用前景和发展趋势。在不久的未来,机载激光通信将会成为信息化战争必不可少的通信手段。




2016, 9(1): 74-80.
doi: 10.3788/CO.20160901.0074
摘要:
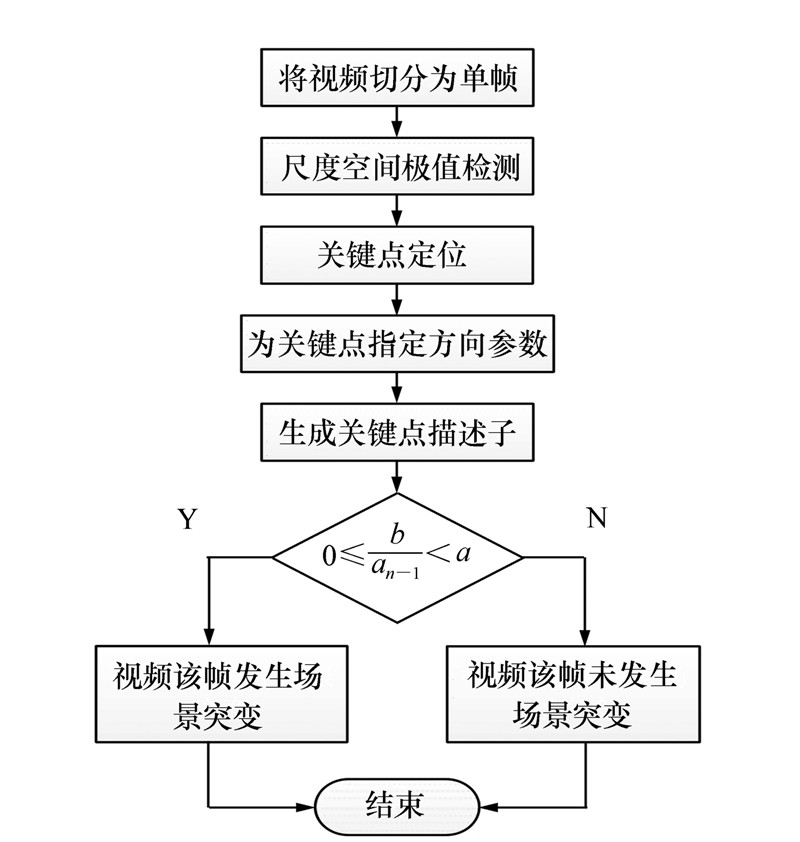
视频场景变化检测对于视频的标注以及语义检索具有非常重要的作用。本文提出了一种结合SIFT(Scale Invariant Feature Transformation)特征点提取的场景变化检测算法。首先利用SIFT算法分别提取出视频前后帧的特征点并分别统计其数量,然后对视频前后帧进行图像匹配,统计匹配上的特征点数量,最后将该帧的匹配特征点数量与该帧前一帧的特征点数量做比值,从而通过该比值判断场景变化情况。实验结果表明,视频场景突变检测率平均可以达到95.79%。本算法可以在视频帧进行图像匹配的过程中对场景的变化情况进行判断,因此该算法不仅应用范围较广,还可以保证场景变化检测的精度,仿真结果证明了算法的有效性。
视频场景变化检测对于视频的标注以及语义检索具有非常重要的作用。本文提出了一种结合SIFT(Scale Invariant Feature Transformation)特征点提取的场景变化检测算法。首先利用SIFT算法分别提取出视频前后帧的特征点并分别统计其数量,然后对视频前后帧进行图像匹配,统计匹配上的特征点数量,最后将该帧的匹配特征点数量与该帧前一帧的特征点数量做比值,从而通过该比值判断场景变化情况。实验结果表明,视频场景突变检测率平均可以达到95.79%。本算法可以在视频帧进行图像匹配的过程中对场景的变化情况进行判断,因此该算法不仅应用范围较广,还可以保证场景变化检测的精度,仿真结果证明了算法的有效性。



2016, 9(1): 81-88.
doi: 10.3788/CO.20160901.0081
摘要:
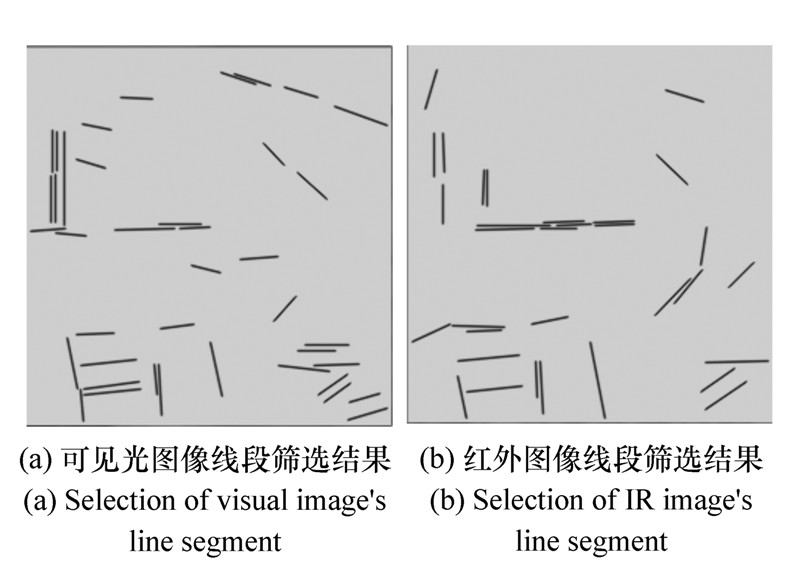
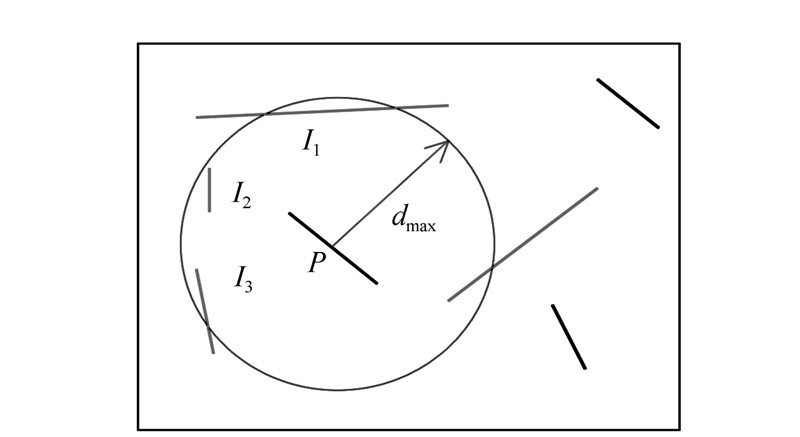
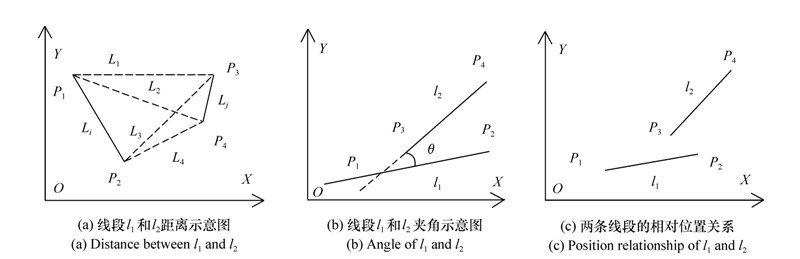
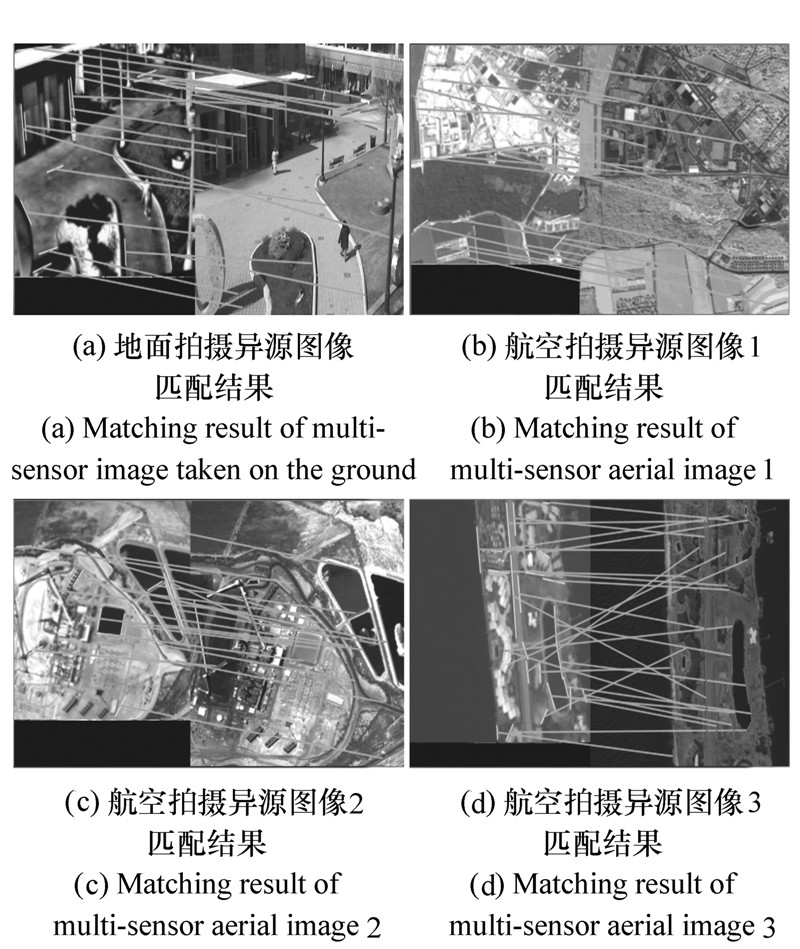
为了寻求应用于复杂地物条件下异源景象匹配的算法,使其满足尺度和旋转不变性,受视觉成像系统的启发,利用初始简图可以表征图像大部分信息的特点,提出了一种新的基于线段对的异源图像匹配算法。首先,提取并筛选图像中能够表征图像信息的线段;然后,利用线段自身信息及线段的相对位置关系构建线段对特征;接着,通过线段对之间的相似性对图像进行粗匹配;最后,利用线段之间的拓扑关系进行精匹配。实验表明,本文方法对具有旋转、缩放和平移变换的异源图像的匹配正确率达到了75%以上,运算时间是传统匹配算法的1/5左右,基本满足了异源景象匹配应用对算法实时性和准确性的要求。
为了寻求应用于复杂地物条件下异源景象匹配的算法,使其满足尺度和旋转不变性,受视觉成像系统的启发,利用初始简图可以表征图像大部分信息的特点,提出了一种新的基于线段对的异源图像匹配算法。首先,提取并筛选图像中能够表征图像信息的线段;然后,利用线段自身信息及线段的相对位置关系构建线段对特征;接着,通过线段对之间的相似性对图像进行粗匹配;最后,利用线段之间的拓扑关系进行精匹配。实验表明,本文方法对具有旋转、缩放和平移变换的异源图像的匹配正确率达到了75%以上,运算时间是传统匹配算法的1/5左右,基本满足了异源景象匹配应用对算法实时性和准确性的要求。




2016, 9(1): 89-96.
doi: 10.3788/CO.20160901.0089
摘要:
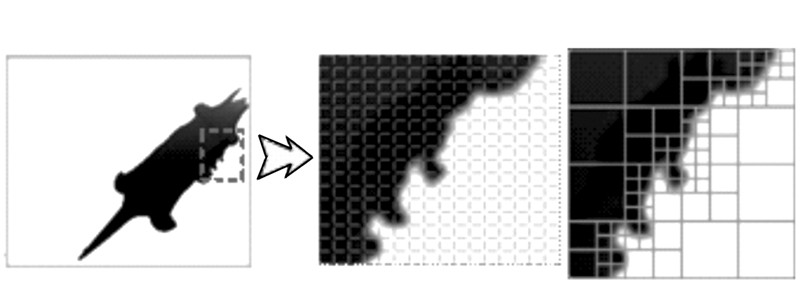
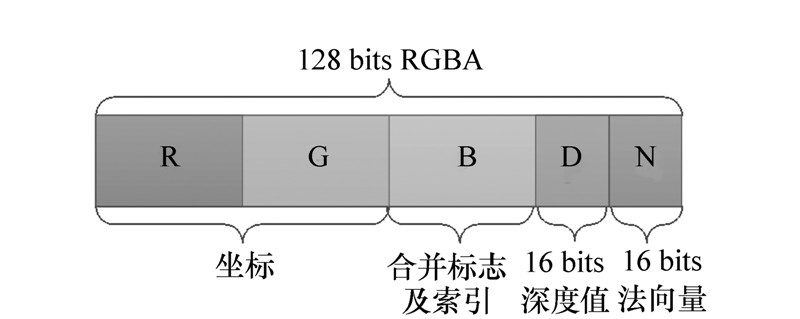
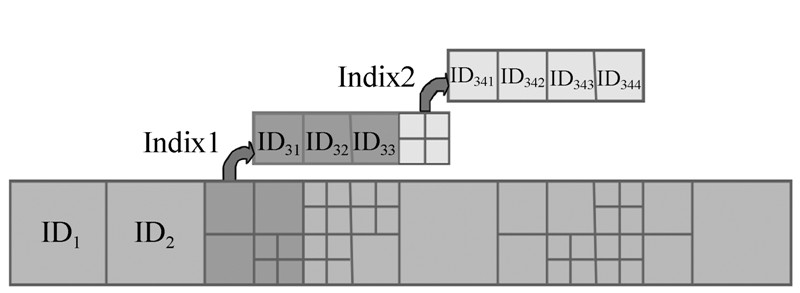
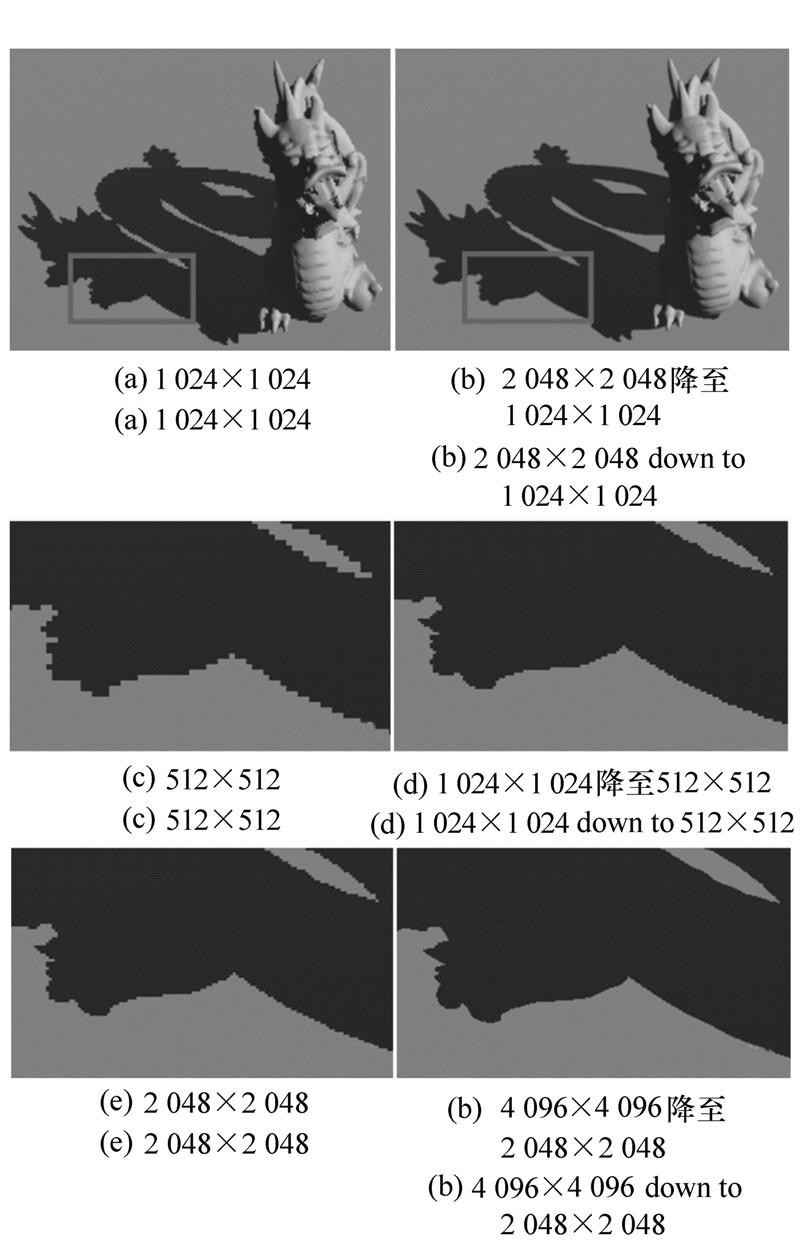
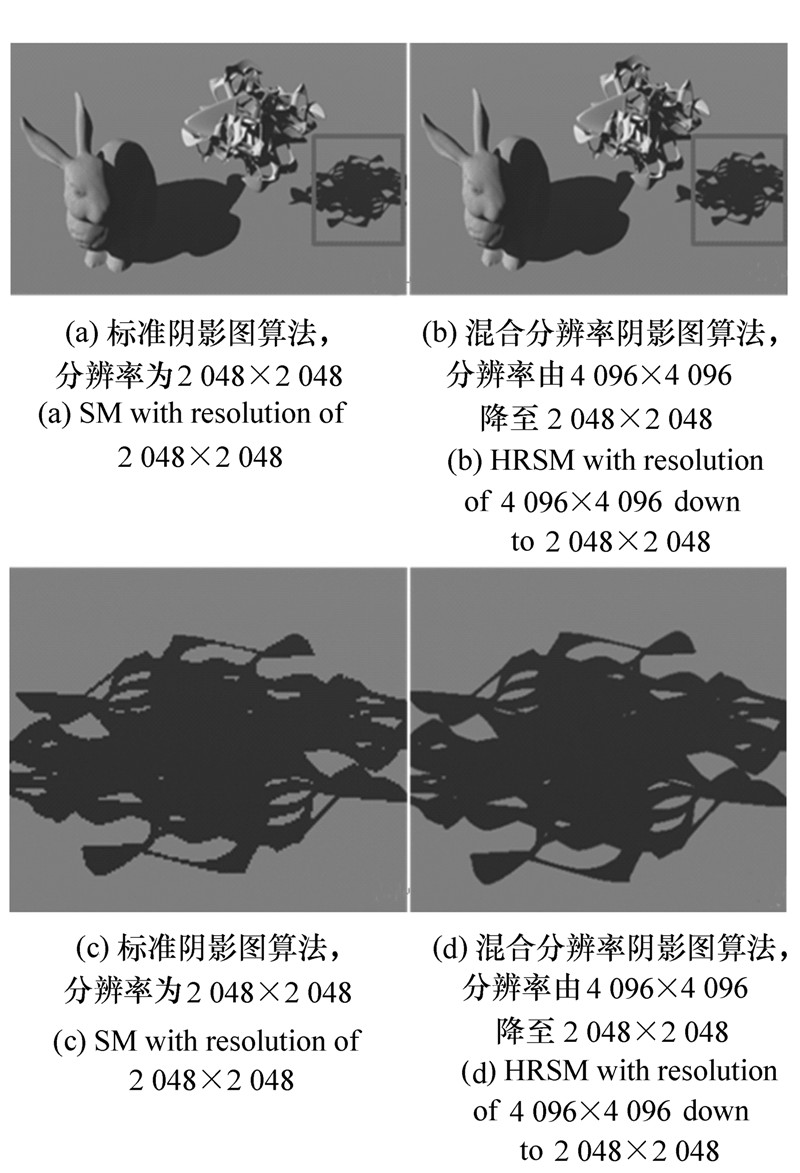
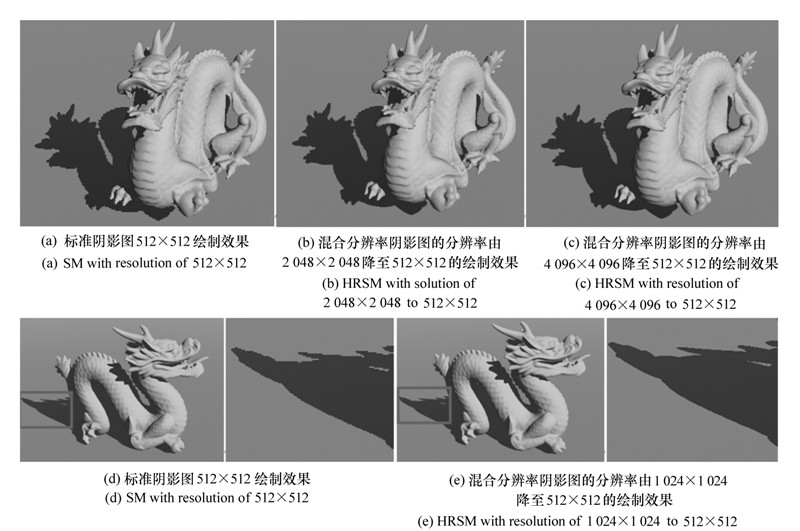
在实时的虚拟场景渲染中,为减少阴影图算法由分辨率不足导致的阴影走样,提出了利用并行线性扫描的混合分辨率阴影图算法。首先,从光源视角生成高分辨率阴影图,利用并行线性扫描算法对深度均值差进行计算和分析,自底向上的合并纹素,建立纹素之间的索引关系并讨论混合分辨率阴影图的存储。在渲染阶段,利用混合分辨率阴影图进行深度测试,绘制实时的反走样阴影。实验表明,与标准阴影图相比,混合分辨率阴影图能提高20%以上的重要区域分辨率,明显改善阴影边界锯齿走样,使Dragon等模型的计算时间减少9%~18%。经实际应用验证,混合分辨率阴影图是一种有效的实时阴影绘制算法,可有效减少阴影图算法的走样。
在实时的虚拟场景渲染中,为减少阴影图算法由分辨率不足导致的阴影走样,提出了利用并行线性扫描的混合分辨率阴影图算法。首先,从光源视角生成高分辨率阴影图,利用并行线性扫描算法对深度均值差进行计算和分析,自底向上的合并纹素,建立纹素之间的索引关系并讨论混合分辨率阴影图的存储。在渲染阶段,利用混合分辨率阴影图进行深度测试,绘制实时的反走样阴影。实验表明,与标准阴影图相比,混合分辨率阴影图能提高20%以上的重要区域分辨率,明显改善阴影边界锯齿走样,使Dragon等模型的计算时间减少9%~18%。经实际应用验证,混合分辨率阴影图是一种有效的实时阴影绘制算法,可有效减少阴影图算法的走样。

2016, 9(1): 97-105.
doi: 10.3788/CO.20160901.0097
摘要:
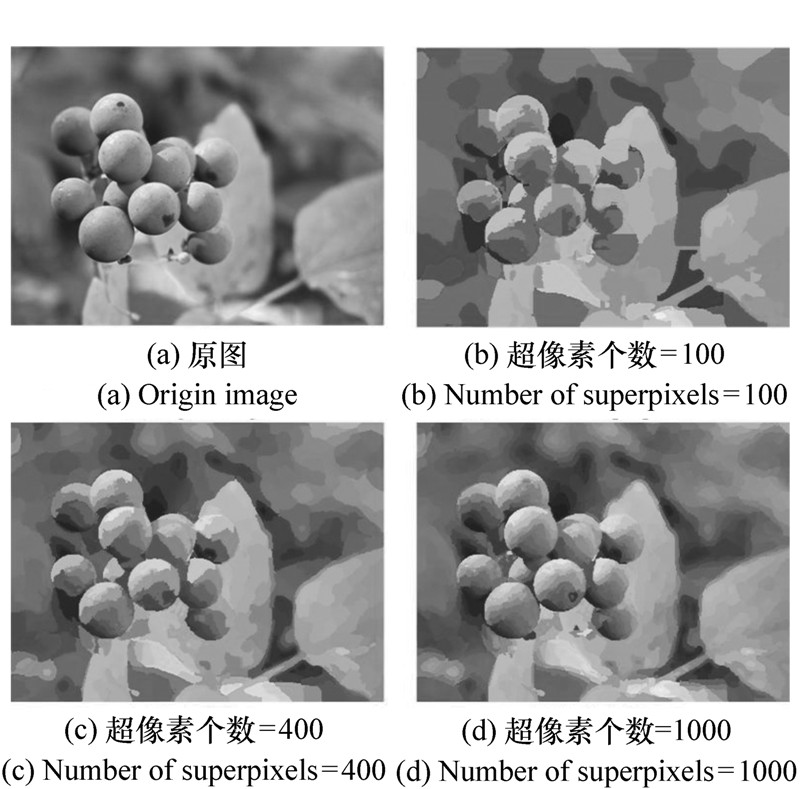
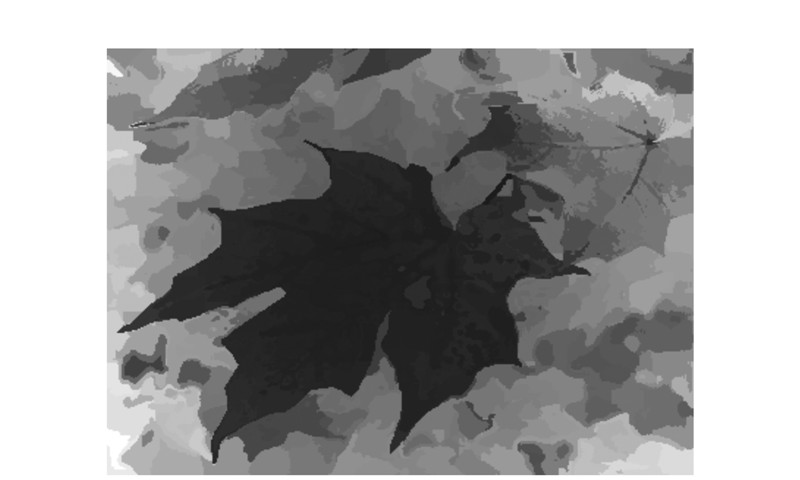
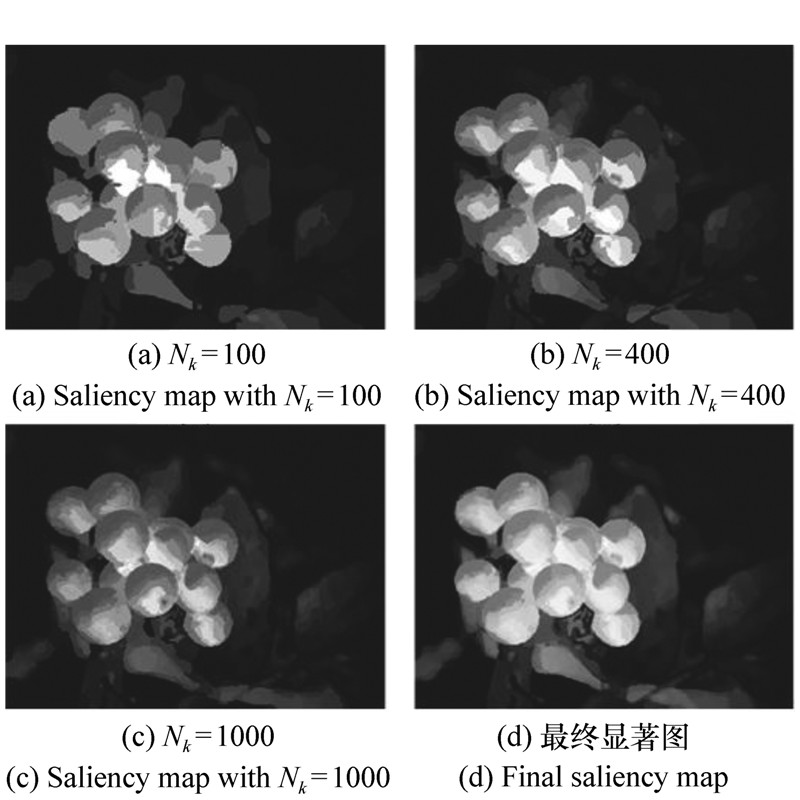
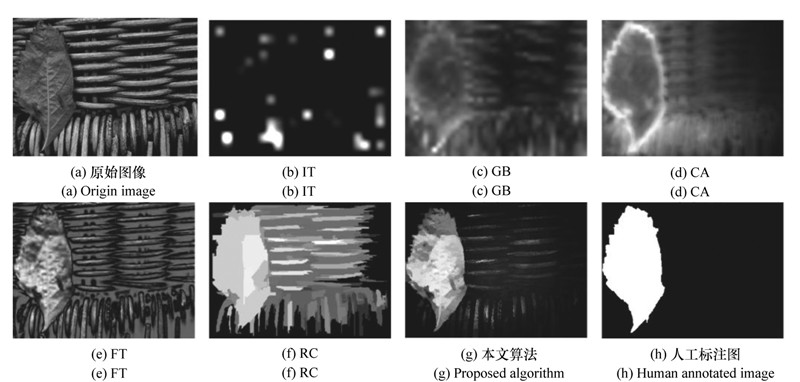
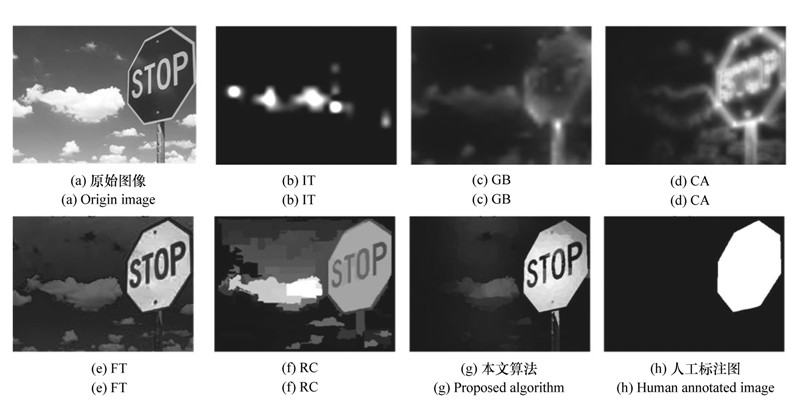
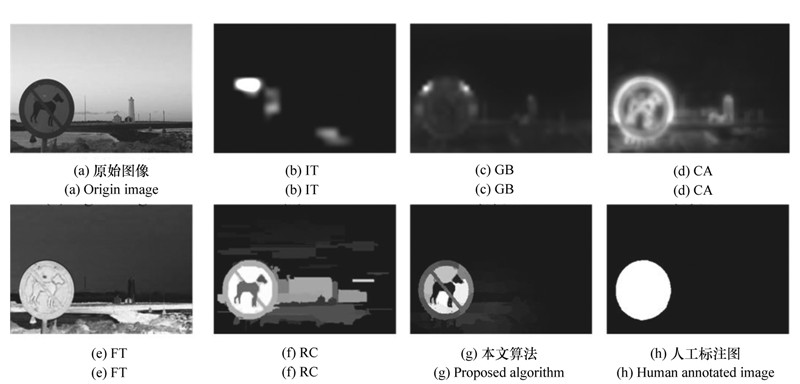
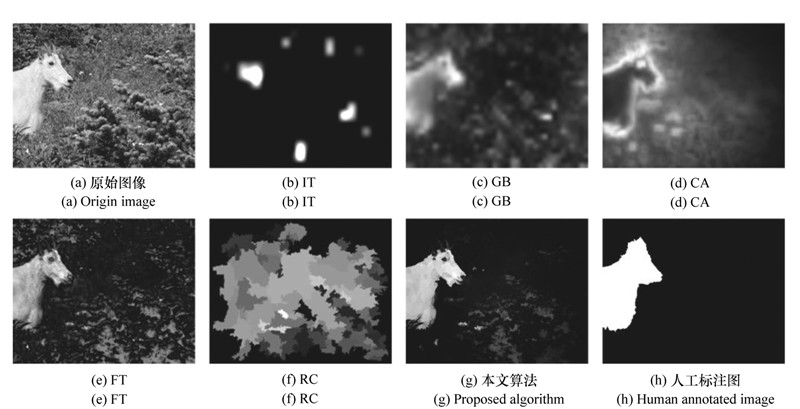
为了对图像中的显著目标进行更精确的识别,提出一种新的基于多尺度区域对比的视觉显著性计算模型。首先基于多尺度思想将图像分别分割为不同数目的超像素,对超像素内的像素颜色值取平均以生成抽象化图像;然后根据显著特征的稀少性及显著特征的聚集性,计算单一尺度下超像素颜色特征的显著性值;最后通过取各尺度超像素显著度的平均值来融合多尺度显著图,得到最终的视觉显著图。实验表明,以MSRA图库中的1000张随机自然图片为例,该模型较现有较好的区域对比模型,显著目标识别的精确率提高了14.8%,F-Measure值提高了9.2%。与现有的算法相比,该模型提高了算法对显著目标大小的适应性,减少了背景对显著目标识别的干扰,具有更好的一致性,能更好地识别显著目标。
为了对图像中的显著目标进行更精确的识别,提出一种新的基于多尺度区域对比的视觉显著性计算模型。首先基于多尺度思想将图像分别分割为不同数目的超像素,对超像素内的像素颜色值取平均以生成抽象化图像;然后根据显著特征的稀少性及显著特征的聚集性,计算单一尺度下超像素颜色特征的显著性值;最后通过取各尺度超像素显著度的平均值来融合多尺度显著图,得到最终的视觉显著图。实验表明,以MSRA图库中的1000张随机自然图片为例,该模型较现有较好的区域对比模型,显著目标识别的精确率提高了14.8%,F-Measure值提高了9.2%。与现有的算法相比,该模型提高了算法对显著目标大小的适应性,减少了背景对显著目标识别的干扰,具有更好的一致性,能更好地识别显著目标。





2016, 9(1): 106-113.
doi: 10.3788/CO.20160901.0106
摘要:
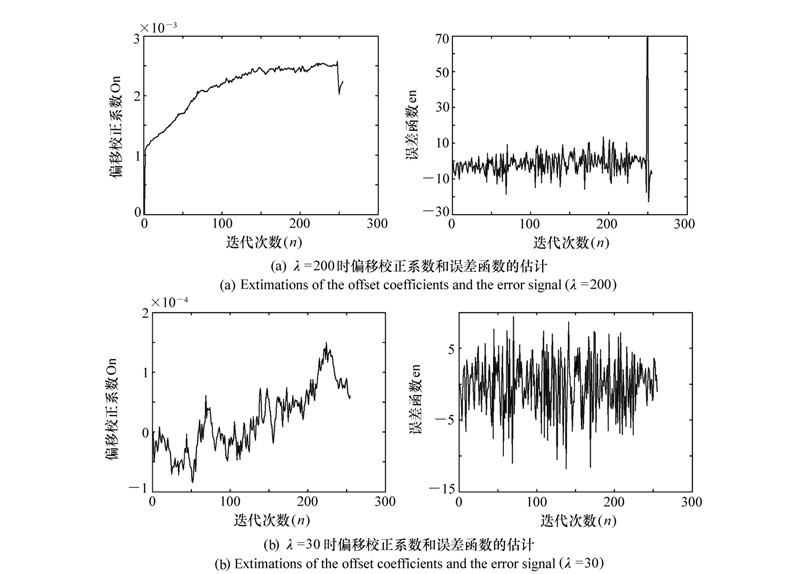
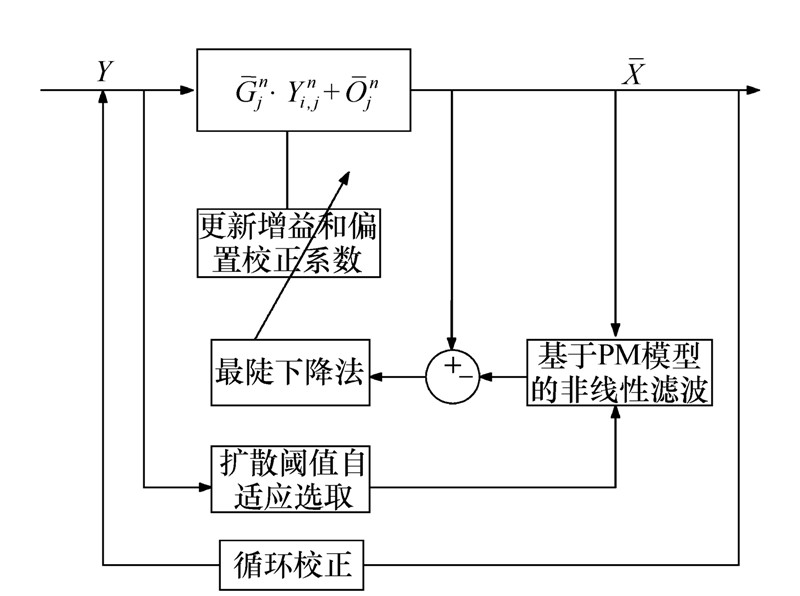
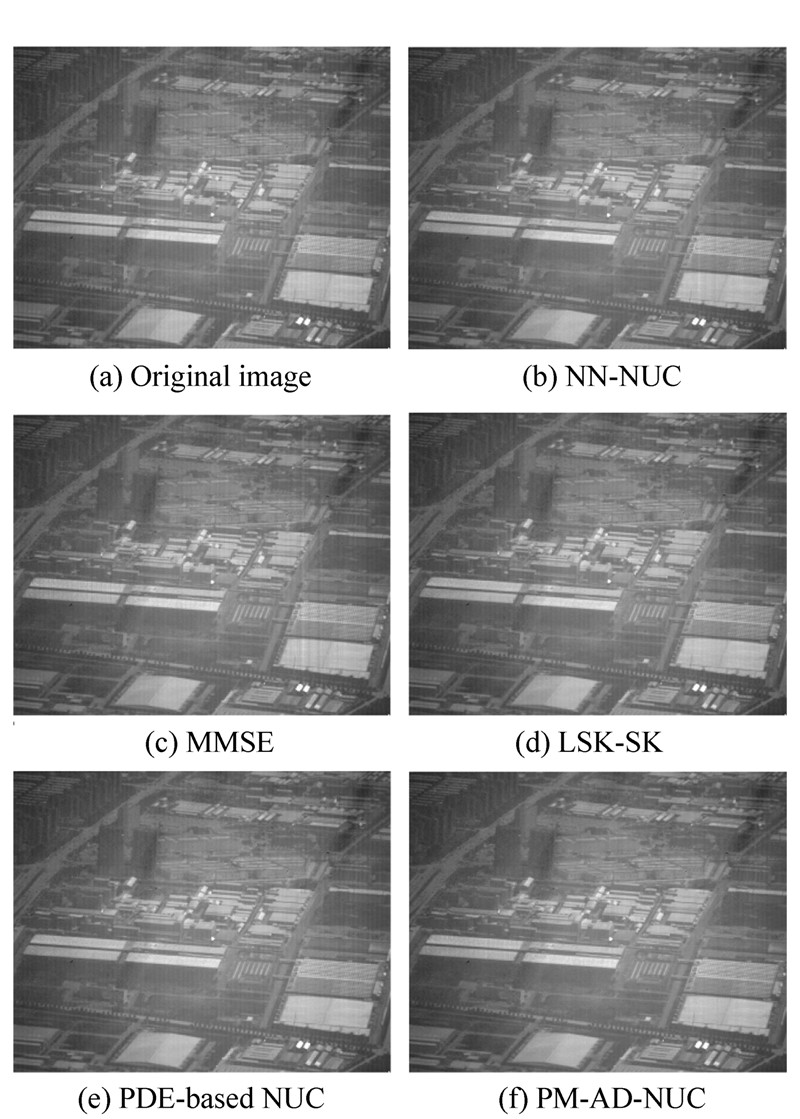
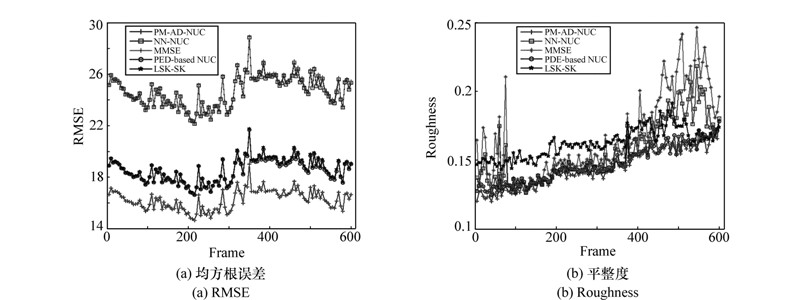
针对红外焦平面成像系统存在列向条纹非均匀性的现象,采用了一种基于自适应PM扩散模型的非均匀校正新算法。首先,综合利用图像梯度信息和局部灰度统计信息,自适应计算PM模型的扩散阈值;然后将每列像素的PM模型估计值作为该列像素的期望值;最后采用最陡下降法迭代计算得到每列像元的校正参数,并对结果进行循环校正以提高校正效果。实验结果表明:该算法可以保护图像边缘信息,与同类算法相比,能够更有效地抑制条纹非均匀性,并且能够防止图像产生鬼影。
针对红外焦平面成像系统存在列向条纹非均匀性的现象,采用了一种基于自适应PM扩散模型的非均匀校正新算法。首先,综合利用图像梯度信息和局部灰度统计信息,自适应计算PM模型的扩散阈值;然后将每列像素的PM模型估计值作为该列像素的期望值;最后采用最陡下降法迭代计算得到每列像元的校正参数,并对结果进行循环校正以提高校正效果。实验结果表明:该算法可以保护图像边缘信息,与同类算法相比,能够更有效地抑制条纹非均匀性,并且能够防止图像产生鬼影。

2016, 9(1): 114-121.
doi: 10.3788/CO.20160901.0114
摘要:
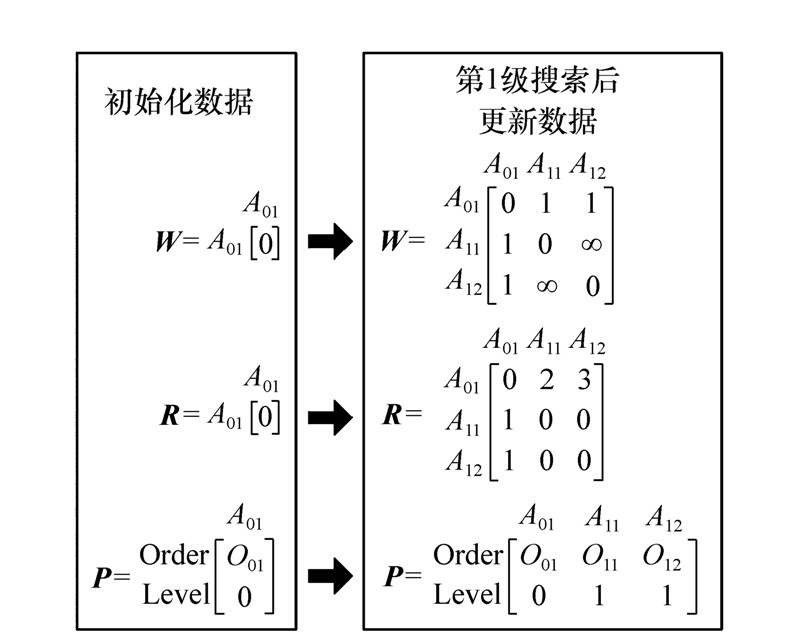
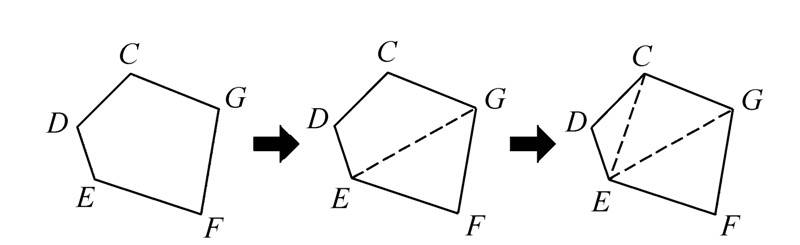
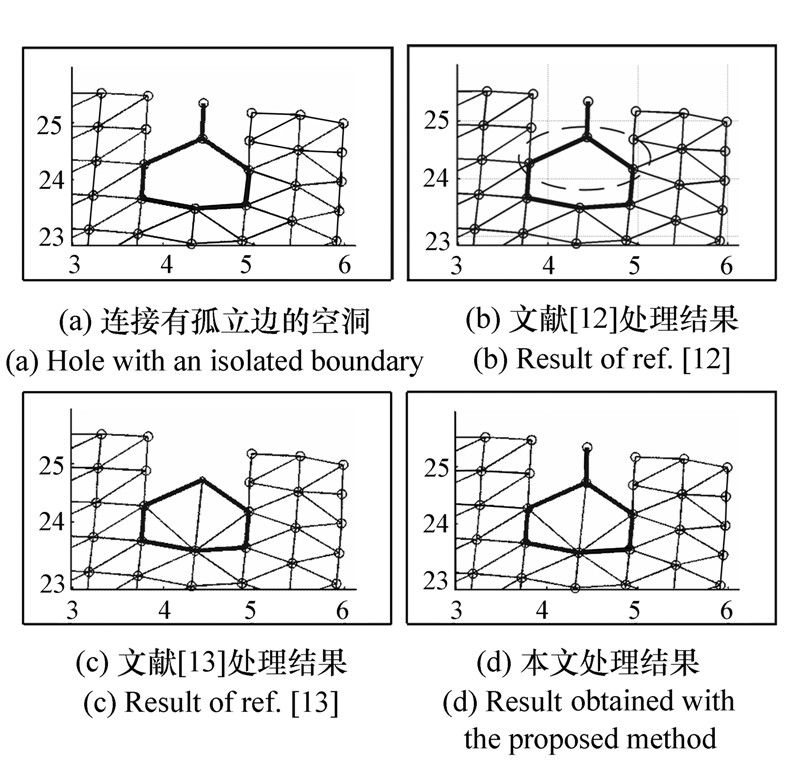
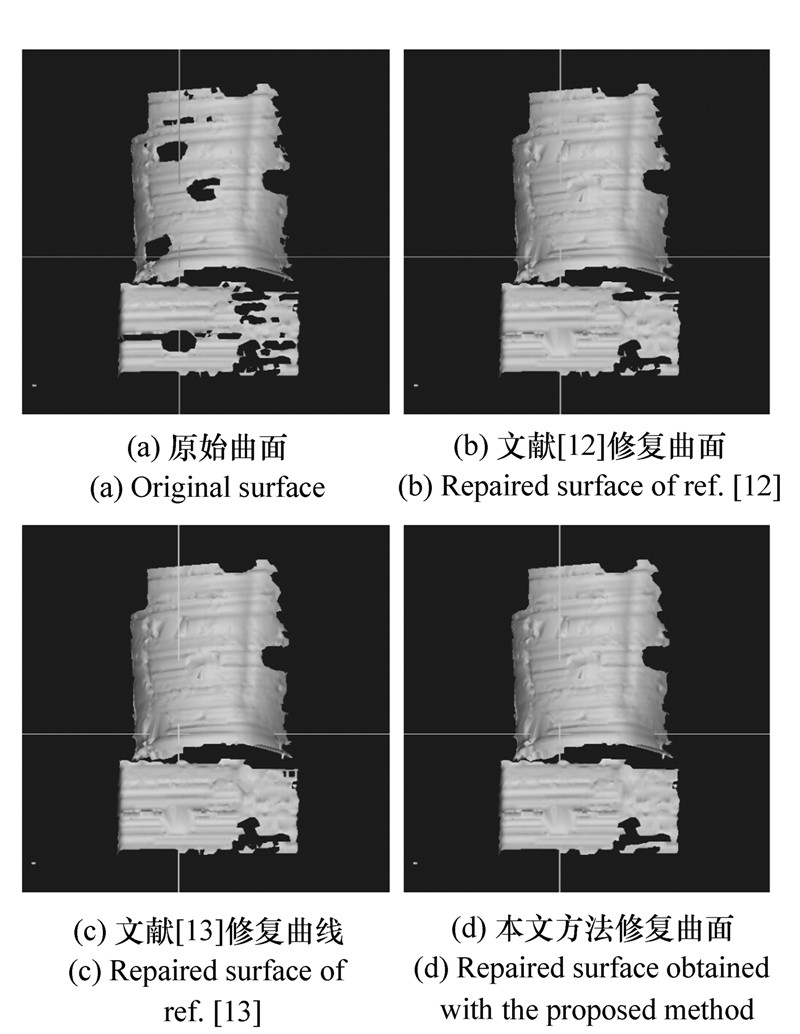
为了解决三维激光扫描系统中重构曲面存在的空洞问题,提出了基于Floyd最短路径选择算法的空洞识别与修复方法。该方法对三维曲面中所有可能构成空洞的边界点进行逐个处理,采用树搜索算法获得与处理点直接或间接相连的边界点;将搜索到的边界点作为路径选择的节点,将连接节点的边界边作为路径选择的边并根据节点的搜索级别设置边的长度。当新搜索到的边界点与已搜索点发生重复时,首先,利用Floyd算法处理距离矩阵和路由矩阵找到空洞端点;然后,根据重复点与空洞端点生成空洞边集,最后,采用波前法对空洞边集进行处理。实验结果表明:本文所提方法能够准确识别连接有孤立边的空洞以及两个相邻空洞的特殊空洞结构,与传统方法相比,该方法具有更强的通用性和鲁棒性,空洞修复数量与两个传统方法相比分别提高了54.1%和21.3%。
为了解决三维激光扫描系统中重构曲面存在的空洞问题,提出了基于Floyd最短路径选择算法的空洞识别与修复方法。该方法对三维曲面中所有可能构成空洞的边界点进行逐个处理,采用树搜索算法获得与处理点直接或间接相连的边界点;将搜索到的边界点作为路径选择的节点,将连接节点的边界边作为路径选择的边并根据节点的搜索级别设置边的长度。当新搜索到的边界点与已搜索点发生重复时,首先,利用Floyd算法处理距离矩阵和路由矩阵找到空洞端点;然后,根据重复点与空洞端点生成空洞边集,最后,采用波前法对空洞边集进行处理。实验结果表明:本文所提方法能够准确识别连接有孤立边的空洞以及两个相邻空洞的特殊空洞结构,与传统方法相比,该方法具有更强的通用性和鲁棒性,空洞修复数量与两个传统方法相比分别提高了54.1%和21.3%。



2016, 9(1): 122-129.
doi: 10.3788/CO.20160901.0122
摘要:
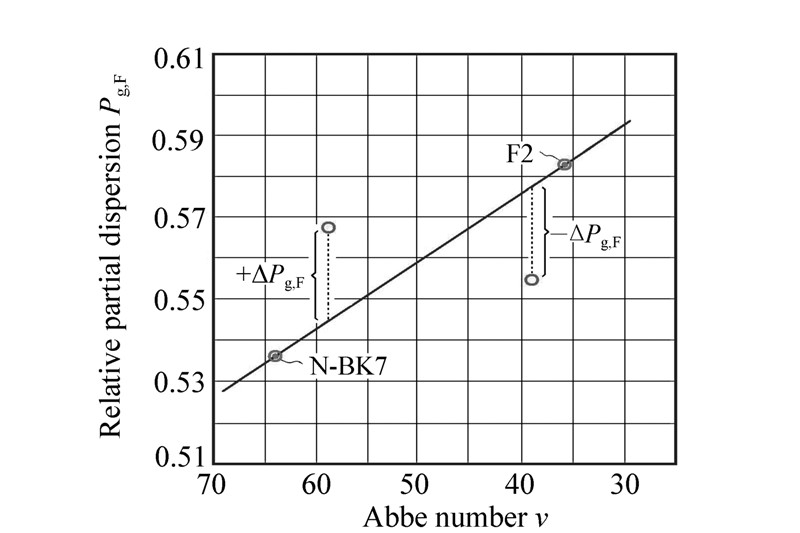
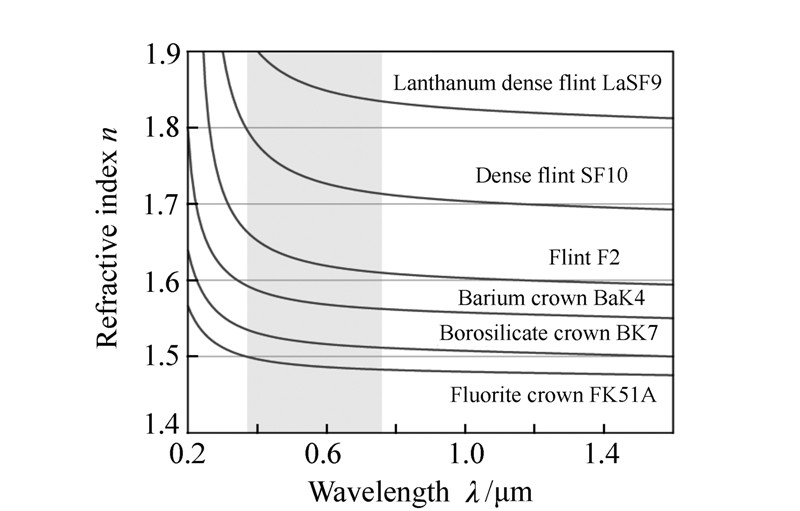
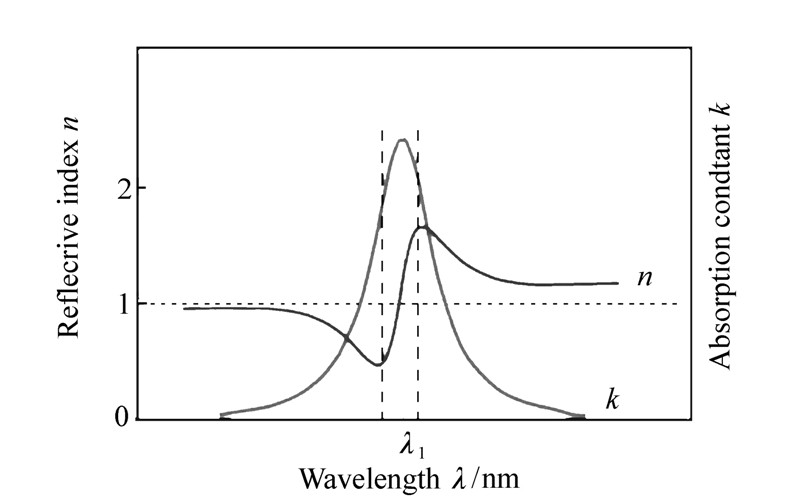
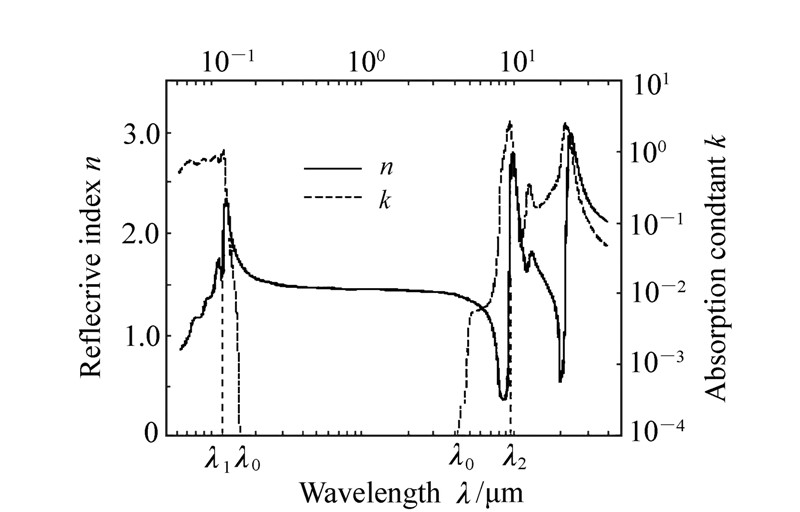
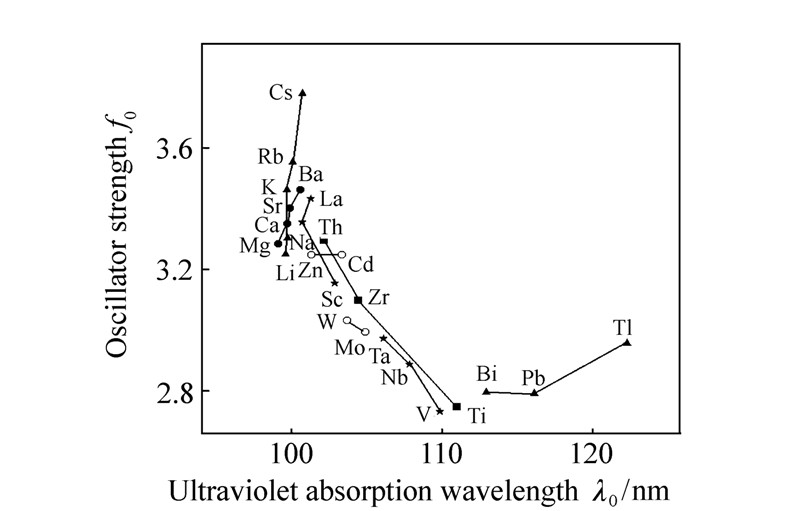
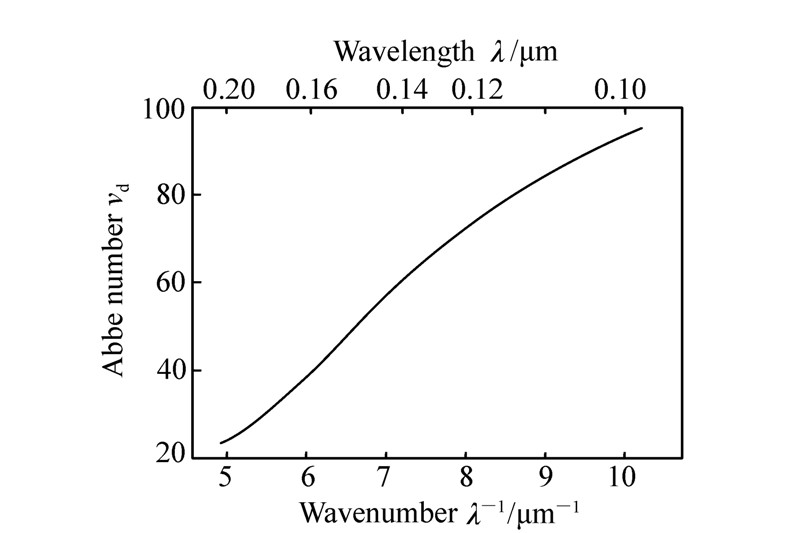
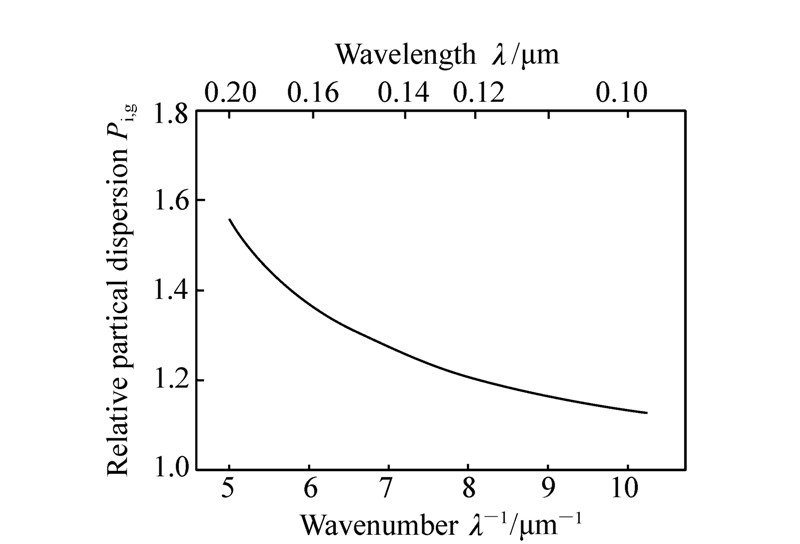
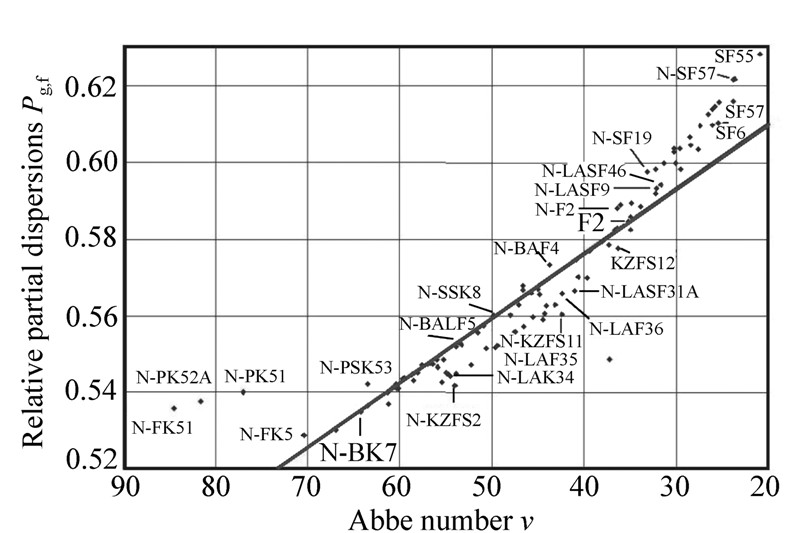
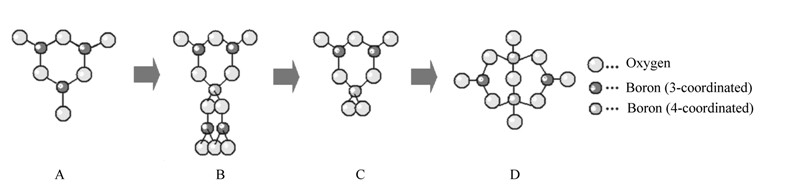
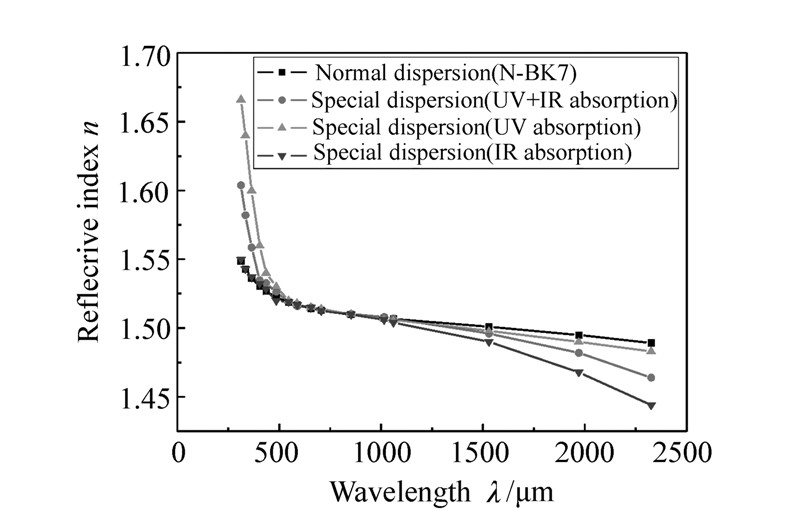
本文对光学玻璃的特殊色散机理进行了深入研究。研究认为,光学玻璃的特殊色散性能表征参数主要是相对部分色散偏离值ΔPg,F,ΔPg,F绝对值越大,表明光学玻璃的特殊色散越大,越有利于消除光学系统的二级光谱。光学玻璃的特殊色散机理是由紫外和红外本征吸收引起。色散曲线中本征吸收峰的漂移和强弱将影响可见光区色散曲线斜率,进而使玻璃的相对部分色散偏离值变化。紫外本征吸收是由电子跃迁引起的;而红外本征吸收是由分子或分子集团振动造成的。开展特殊色散机理研究不仅可以深入揭示光学玻璃的"组分-结构-性能"关系规律,而且有助于开发特殊色散性能更优异的新型光学玻璃。
本文对光学玻璃的特殊色散机理进行了深入研究。研究认为,光学玻璃的特殊色散性能表征参数主要是相对部分色散偏离值ΔPg,F,ΔPg,F绝对值越大,表明光学玻璃的特殊色散越大,越有利于消除光学系统的二级光谱。光学玻璃的特殊色散机理是由紫外和红外本征吸收引起。色散曲线中本征吸收峰的漂移和强弱将影响可见光区色散曲线斜率,进而使玻璃的相对部分色散偏离值变化。紫外本征吸收是由电子跃迁引起的;而红外本征吸收是由分子或分子集团振动造成的。开展特殊色散机理研究不仅可以深入揭示光学玻璃的"组分-结构-性能"关系规律,而且有助于开发特殊色散性能更优异的新型光学玻璃。

2016, 9(1): 130-136.
doi: 10.3788/CO.20160901.0130
摘要:
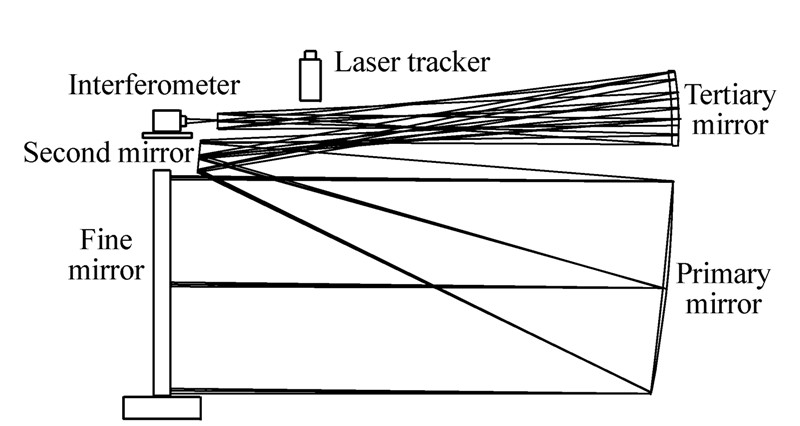
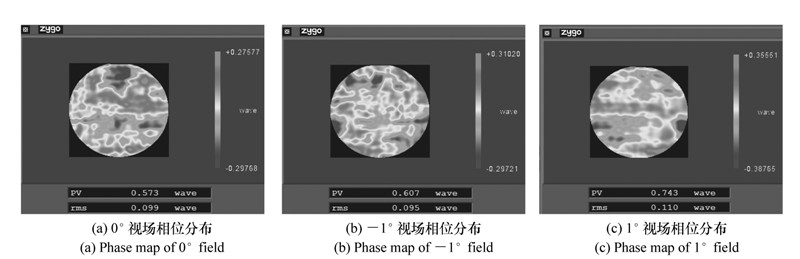
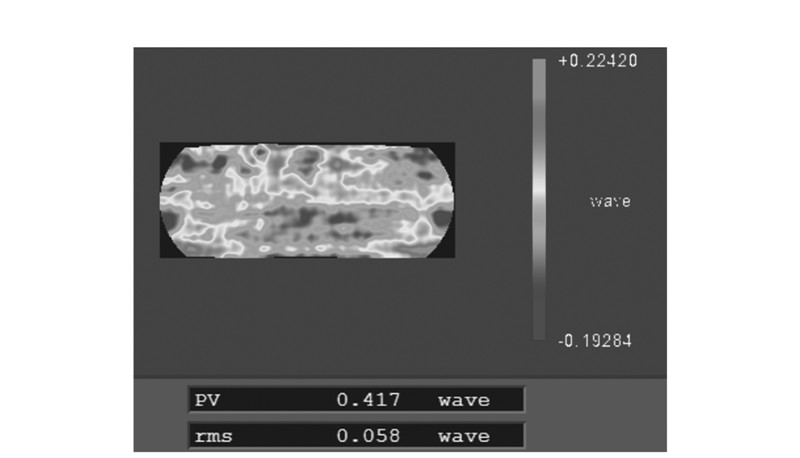
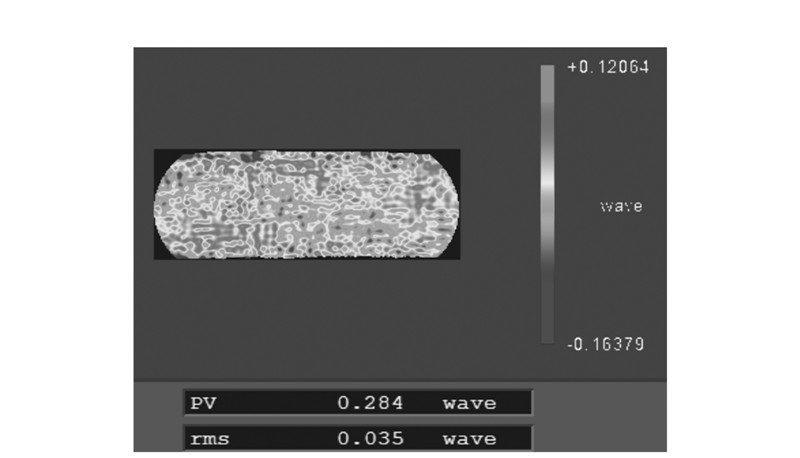
针对大口径离轴凸非球面面形检测的困难,本文将光学系统波像差检验技术与子孔径拼接干涉技术相结合,提出了凸非球面系统拼接检测方法。对该方法的基本原理和具体实现过程进行了分析和研究,并建立了合理的子孔径拼接数学模型。当离轴三反光学系统的主镜和三镜加工完成以后,对整个系统进行装调和测试,并依次测定光学系统各视场的波像差分布,通过综合优化子孔径拼接算法和全口径面形数据插值可以求解得到大口径非球面全口径的面形信息,从而为非球面后续加工和系统的装调提供了依据和保障。结合工程实例,对一口径为287 mm×115 mm的离轴非球面次镜进行了系统拼接测试和加工,经过两个周期的加工和测试,其面形分布的RMS值接近1/30λ(λ=632.8 nm)。
针对大口径离轴凸非球面面形检测的困难,本文将光学系统波像差检验技术与子孔径拼接干涉技术相结合,提出了凸非球面系统拼接检测方法。对该方法的基本原理和具体实现过程进行了分析和研究,并建立了合理的子孔径拼接数学模型。当离轴三反光学系统的主镜和三镜加工完成以后,对整个系统进行装调和测试,并依次测定光学系统各视场的波像差分布,通过综合优化子孔径拼接算法和全口径面形数据插值可以求解得到大口径非球面全口径的面形信息,从而为非球面后续加工和系统的装调提供了依据和保障。结合工程实例,对一口径为287 mm×115 mm的离轴非球面次镜进行了系统拼接测试和加工,经过两个周期的加工和测试,其面形分布的RMS值接近1/30λ(λ=632.8 nm)。



2016, 9(1): 137-143.
doi: 10.3788/CO.20160901.0137
摘要:
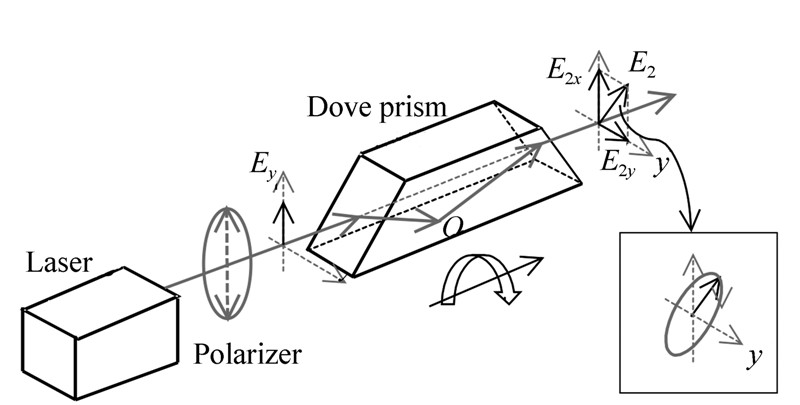
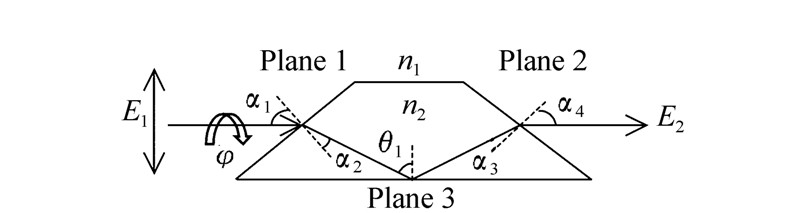
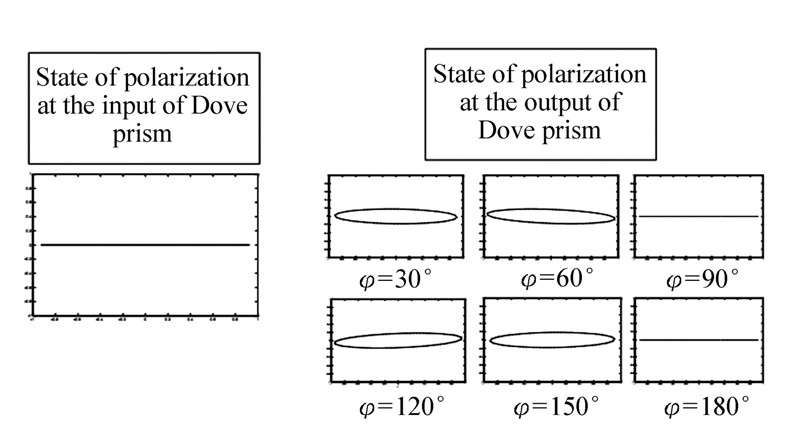
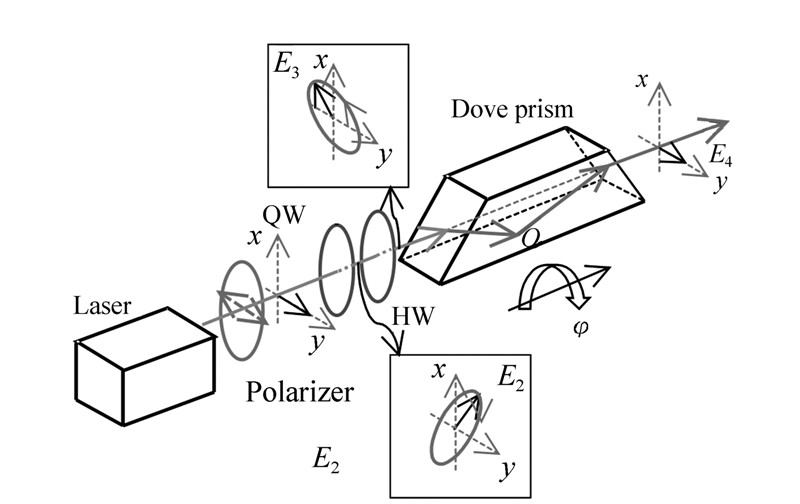
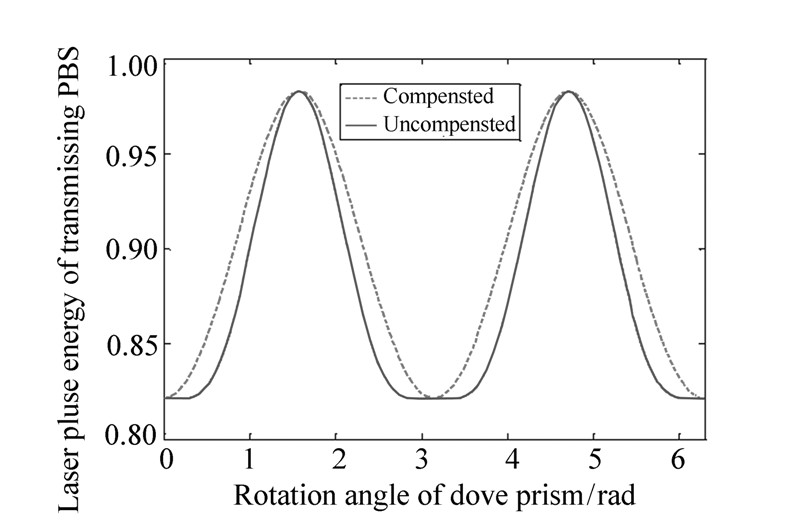
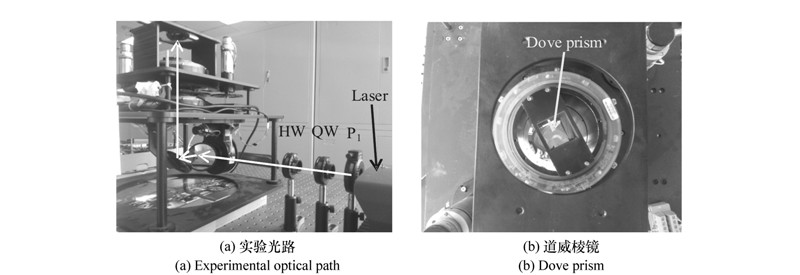
为了避免机载光电吊舱中共口径光学系统内部由于道威棱镜旋转引起的激光照射脉冲偏振态的变化,利用琼斯矩阵对道威棱镜的偏振特性与四分之一波片、半波片补偿道威棱镜旋转引起的激光脉冲偏振态变化进行了理论分析和实验验证。结果表明:线偏振的激光脉冲通过旋转一定角度的道威棱镜时,激光脉冲偏振态变为椭圆偏振,偏振态发生变化;而激光脉冲首先通过旋转一定角度的四分之一波片与半波片时,可使通过道威棱镜系统的激光脉冲偏振态保持不变,且两波片旋转角度与道威棱镜旋转角度之间存在一种非线性关系。采用偏振补偿方法可有效避免机载共口径光学系统中道威棱镜引起的激光脉冲偏振态变化,提高激光脉冲能量利用率,降低激光脉冲后向散射抑制难度。
为了避免机载光电吊舱中共口径光学系统内部由于道威棱镜旋转引起的激光照射脉冲偏振态的变化,利用琼斯矩阵对道威棱镜的偏振特性与四分之一波片、半波片补偿道威棱镜旋转引起的激光脉冲偏振态变化进行了理论分析和实验验证。结果表明:线偏振的激光脉冲通过旋转一定角度的道威棱镜时,激光脉冲偏振态变为椭圆偏振,偏振态发生变化;而激光脉冲首先通过旋转一定角度的四分之一波片与半波片时,可使通过道威棱镜系统的激光脉冲偏振态保持不变,且两波片旋转角度与道威棱镜旋转角度之间存在一种非线性关系。采用偏振补偿方法可有效避免机载共口径光学系统中道威棱镜引起的激光脉冲偏振态变化,提高激光脉冲能量利用率,降低激光脉冲后向散射抑制难度。


2016, 9(1): 144-154.
doi: 10.3788/CO.20160901.0144
摘要:
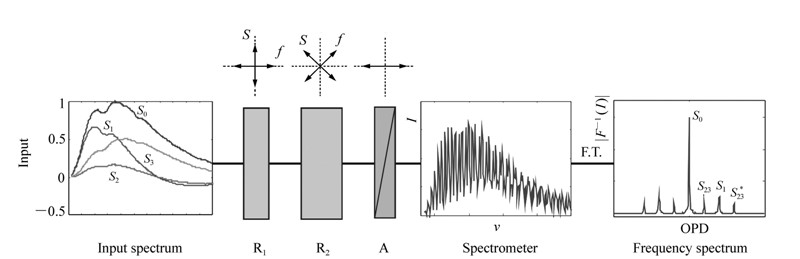
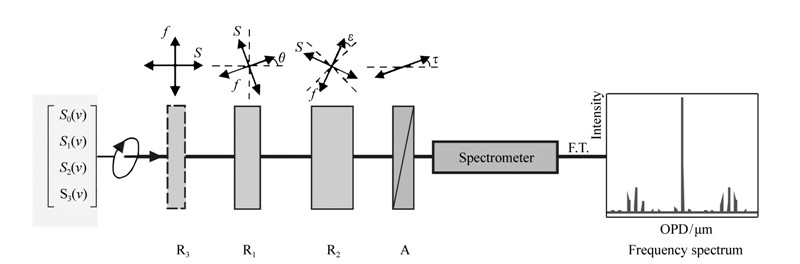
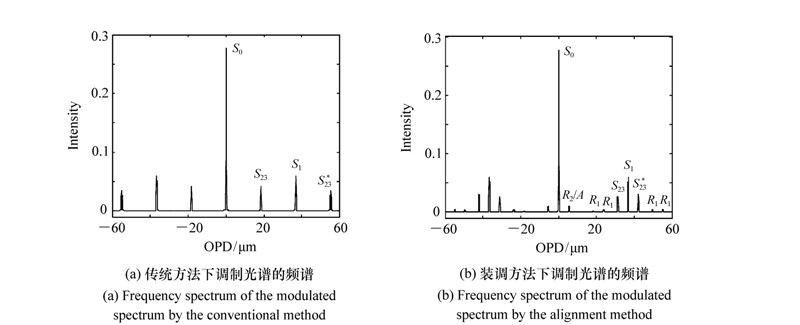
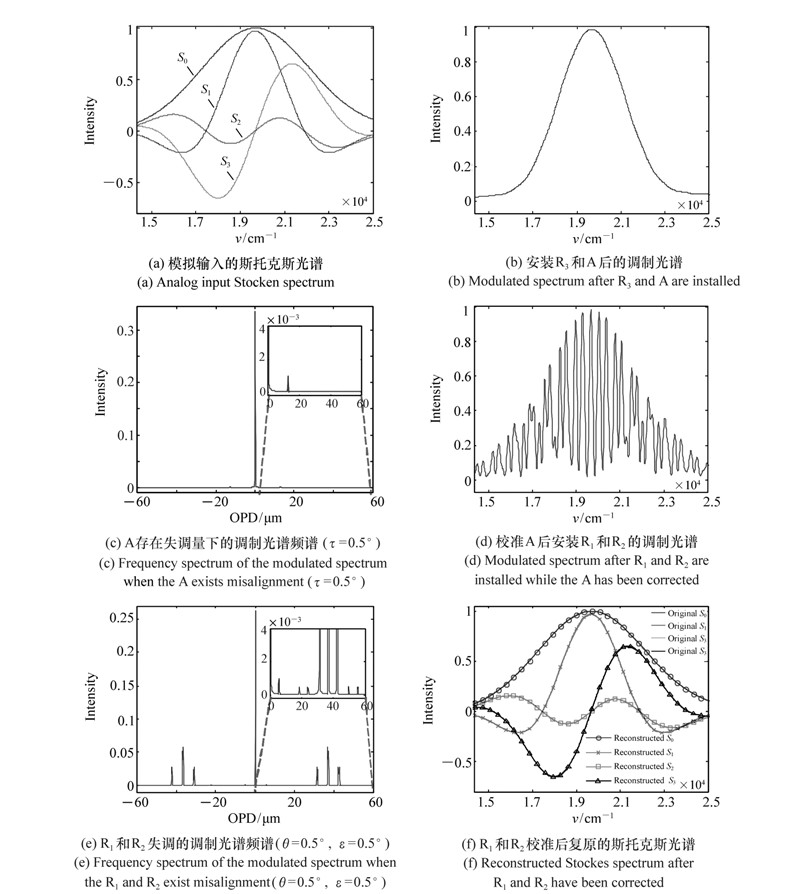
为了提高光谱偏振调制器的探测精度,提出了光谱偏振调制器的高精度装调方法。首先,分析了光谱偏振调制器的调制原理,提出了采用三片多级相位延迟器加线偏振器的装调方案;然后,建立了调制器装调的数理模型,设计了校准多级相位延迟器的厚度;最后,对成像过程进行了计算机仿真实验验证,并模拟了成像系统的装调过程。结果表明:利用该方法能够灵敏检测偏振器件间的微小相对旋转角度误差,可实现调制器的高精度装调,在输入本文设定的校准光谱条件下,绝对精度可达0.2°。该方法保留了传统光谱调制器充分利用通道带宽的优势,保证了复原光谱的分辨率,为强度调制型光谱偏振成像系统的精密装调提供了一定的理论参考。
为了提高光谱偏振调制器的探测精度,提出了光谱偏振调制器的高精度装调方法。首先,分析了光谱偏振调制器的调制原理,提出了采用三片多级相位延迟器加线偏振器的装调方案;然后,建立了调制器装调的数理模型,设计了校准多级相位延迟器的厚度;最后,对成像过程进行了计算机仿真实验验证,并模拟了成像系统的装调过程。结果表明:利用该方法能够灵敏检测偏振器件间的微小相对旋转角度误差,可实现调制器的高精度装调,在输入本文设定的校准光谱条件下,绝对精度可达0.2°。该方法保留了传统光谱调制器充分利用通道带宽的优势,保证了复原光谱的分辨率,为强度调制型光谱偏振成像系统的精密装调提供了一定的理论参考。



2016, 9(1): 155-166.
doi: 10.3788/CO.20160901.0155
摘要:
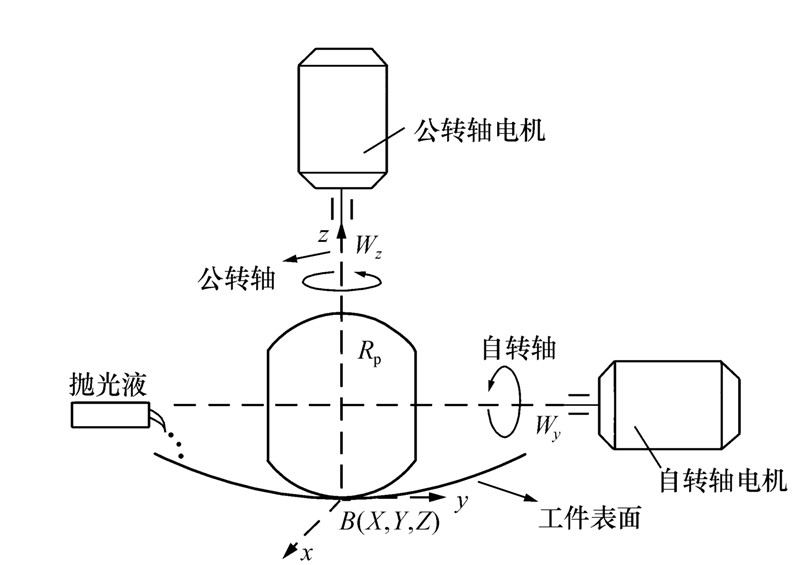
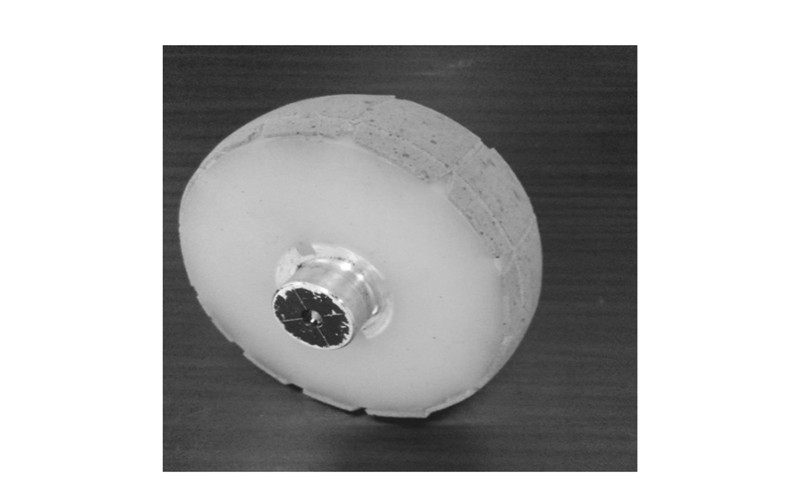
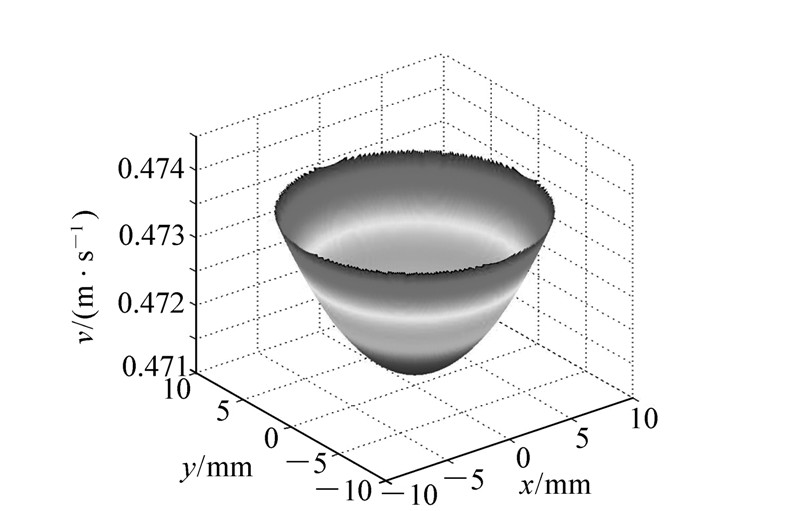
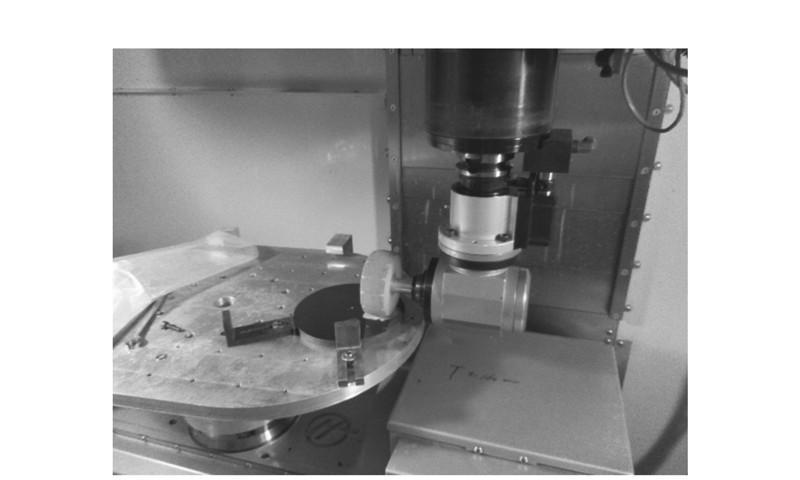
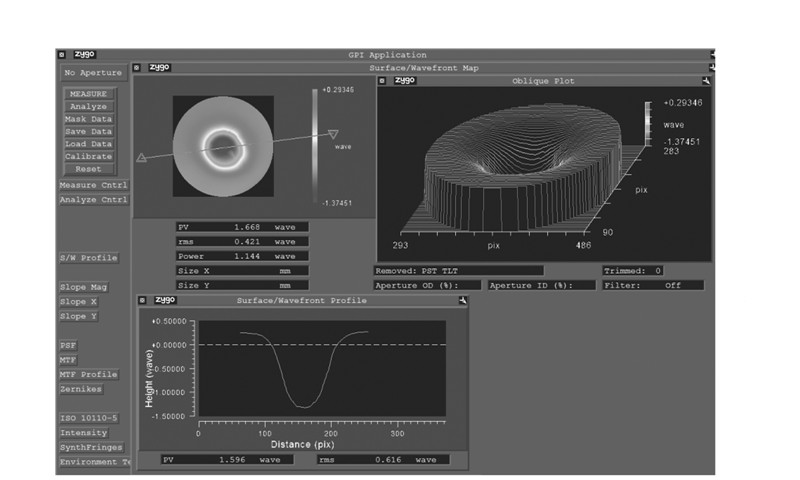
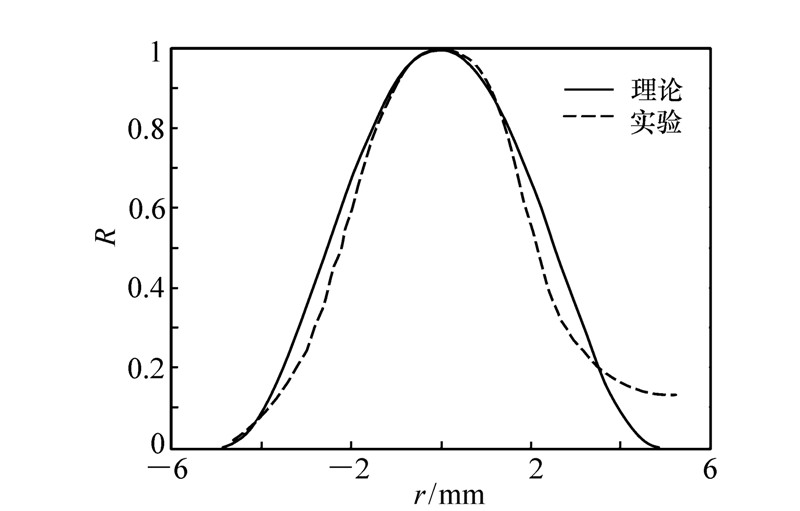
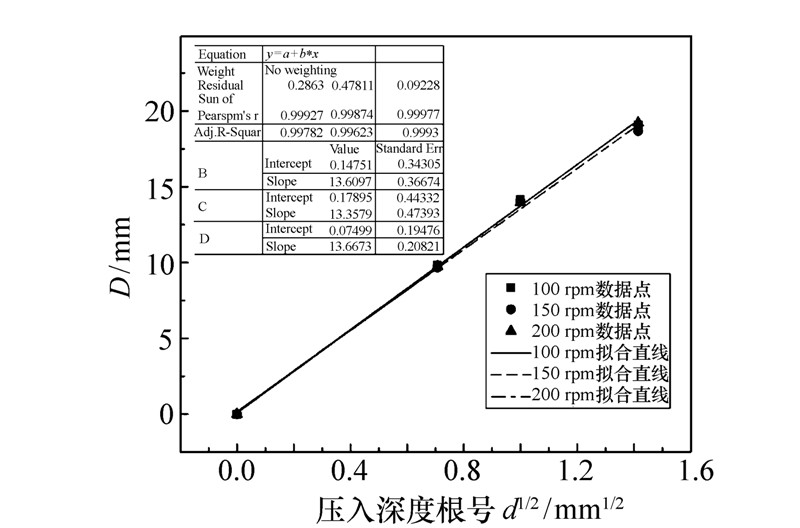
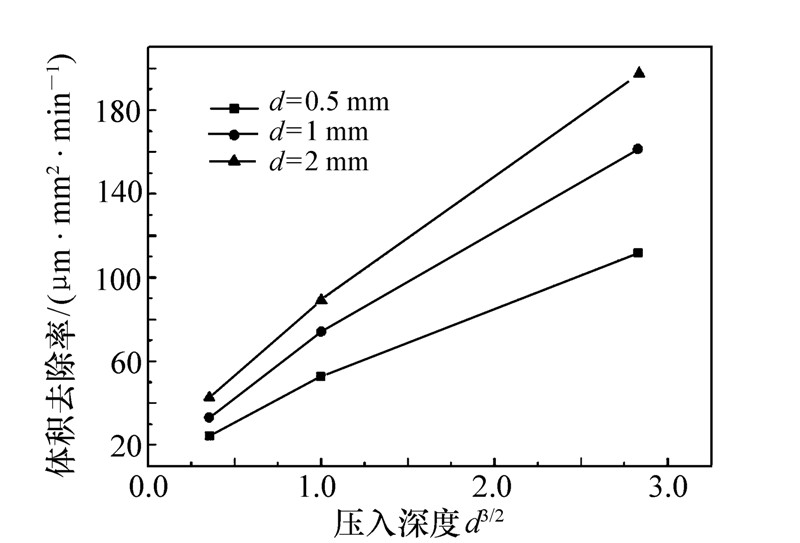
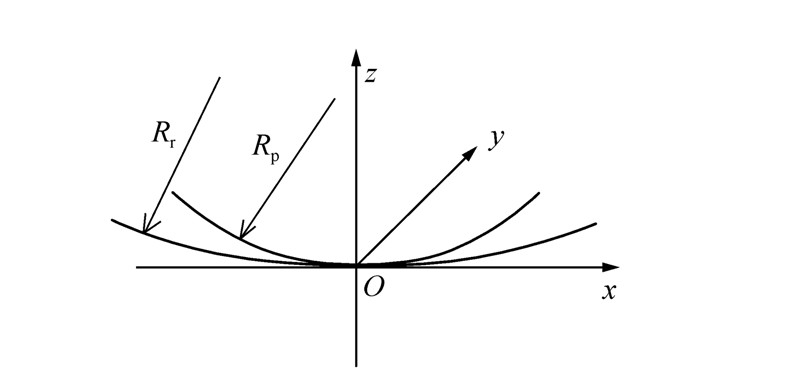
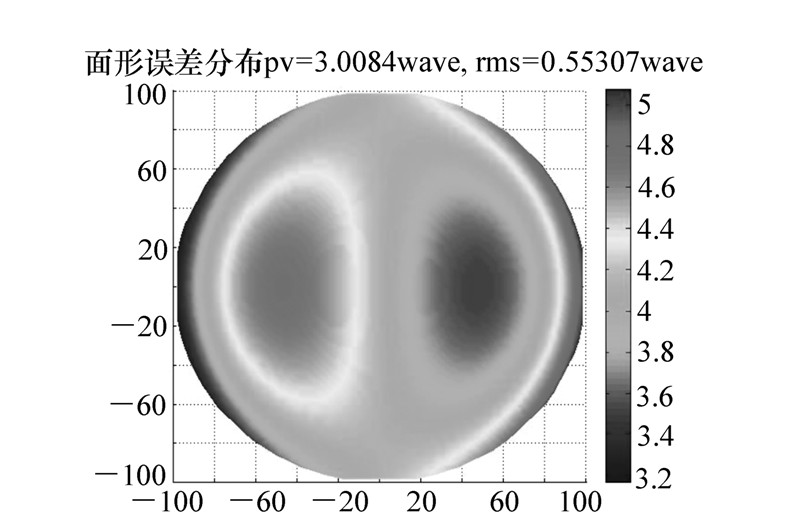
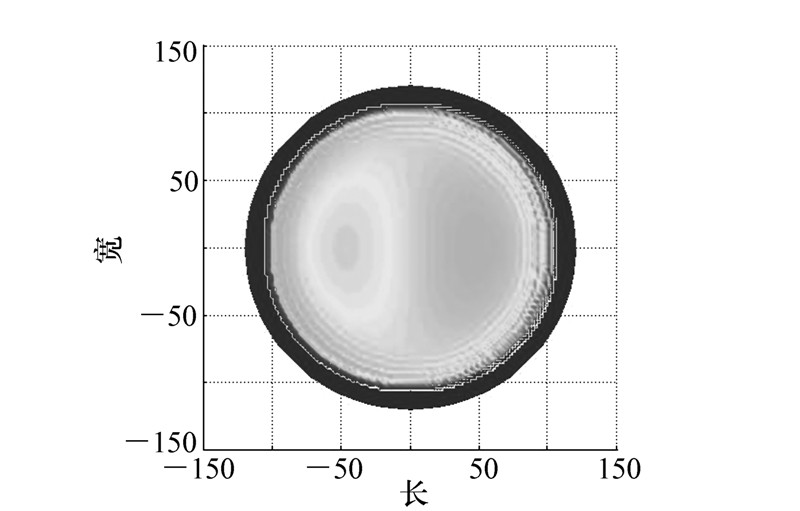
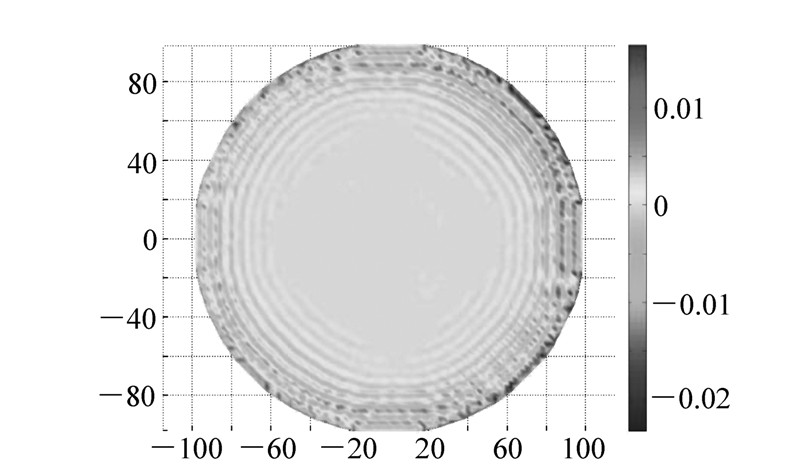
为了提高光学加工效率,缩短大口径光学元件制造周期,本文提出了一种具有公自转运动模式的新型高效抛光方式,对其结构、工作原理以及去除特性进行了研究。首先,介绍了公自转抛光装置机械结构及工作原理。接着,根据Hertz接触理论和Preston方程进行了去除函数建模,讨论了不同转速比情况下的去除函数形状。然后,根据理论模型进行了去除函数实验、工艺参数实验以及稳定性实验,研究了压入深度、转速等工艺参数对去除结果的影响。最后,进行了200 mm口径SiC工件的仿真加工。实验结果表明:在2 mm压入深度、200 rpm转速情况下,去除区域直径为19.23 mm,体去除率达到0.197 mm3/min,去除效率高于同等去除区域大小的传统小磨头加工方式;仿真加工结果表明:SiC仿真镜经过3.7 h加工,面形从3.008λPV,0.553λRMS提高到0.065λPV,0.005λRMS,收敛效率为达到98.18%。
为了提高光学加工效率,缩短大口径光学元件制造周期,本文提出了一种具有公自转运动模式的新型高效抛光方式,对其结构、工作原理以及去除特性进行了研究。首先,介绍了公自转抛光装置机械结构及工作原理。接着,根据Hertz接触理论和Preston方程进行了去除函数建模,讨论了不同转速比情况下的去除函数形状。然后,根据理论模型进行了去除函数实验、工艺参数实验以及稳定性实验,研究了压入深度、转速等工艺参数对去除结果的影响。最后,进行了200 mm口径SiC工件的仿真加工。实验结果表明:在2 mm压入深度、200 rpm转速情况下,去除区域直径为19.23 mm,体去除率达到0.197 mm3/min,去除效率高于同等去除区域大小的传统小磨头加工方式;仿真加工结果表明:SiC仿真镜经过3.7 h加工,面形从3.008λPV,0.553λRMS提高到0.065λPV,0.005λRMS,收敛效率为达到98.18%。