2015年 8卷 第6期
2015, 8(6): 895-908.
doi: 10.3788/CO.20150806.0895
 摘要
摘要 HTML全文
HTML全文 PDF 1980KB
PDF 1980KB
摘要:
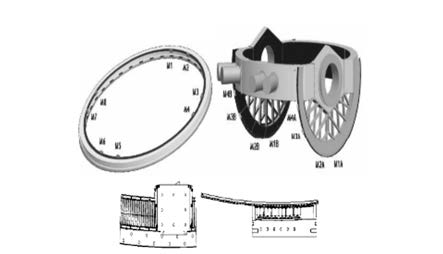
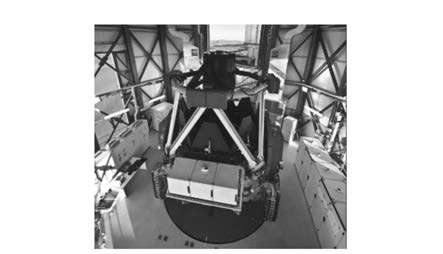
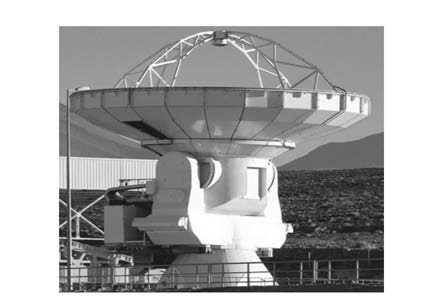
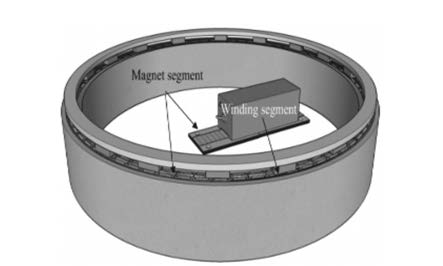
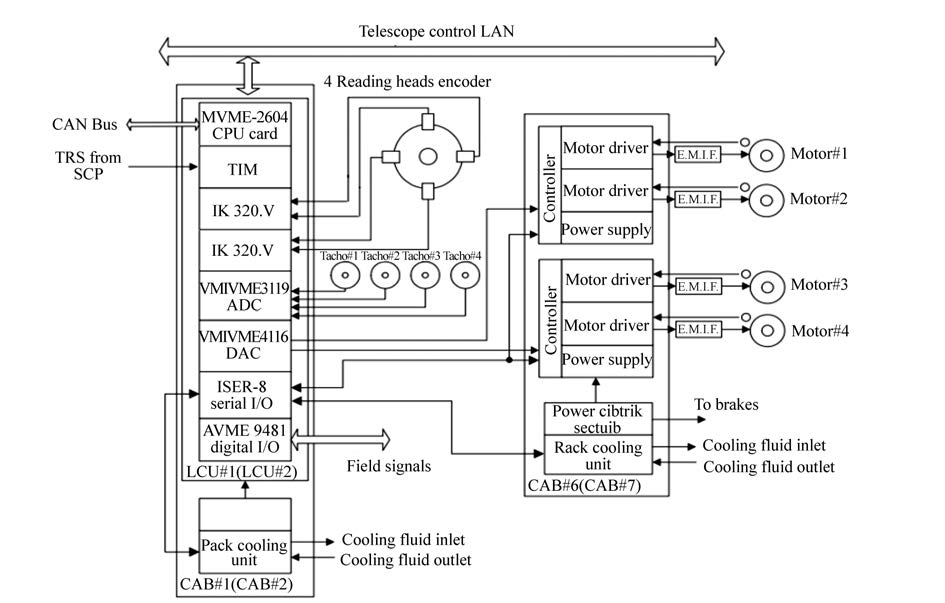
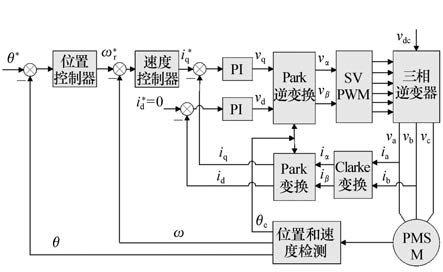
本文主要介绍了当前国际上地基大口径望远镜交流伺服控制系统的发展现状,详细论述了望远镜驱动方式的选择、交流永磁同步力矩电机的应用情况、控制系统的硬件组成以及伺服系统的控制策略。讨论了大型望远镜交流伺服控制系统设计的难点及未来发展趋势,为大型望远镜交流伺服控制系统的设计提供一定的参考。
本文主要介绍了当前国际上地基大口径望远镜交流伺服控制系统的发展现状,详细论述了望远镜驱动方式的选择、交流永磁同步力矩电机的应用情况、控制系统的硬件组成以及伺服系统的控制策略。讨论了大型望远镜交流伺服控制系统设计的难点及未来发展趋势,为大型望远镜交流伺服控制系统的设计提供一定的参考。










2015, 8(6): 909-918.
doi: 10.3788/CO.20150806.0909
摘要:
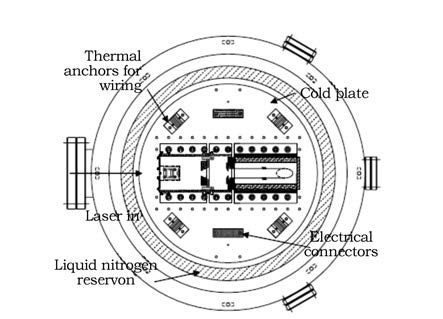
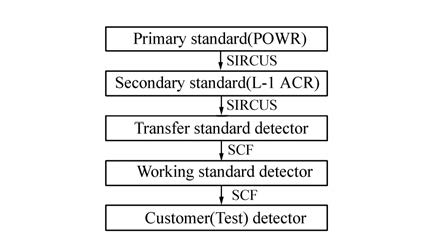
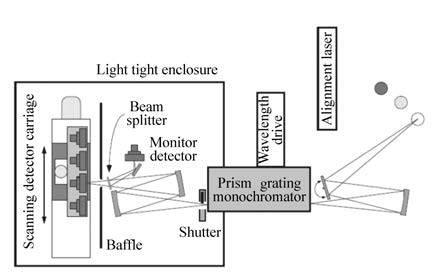
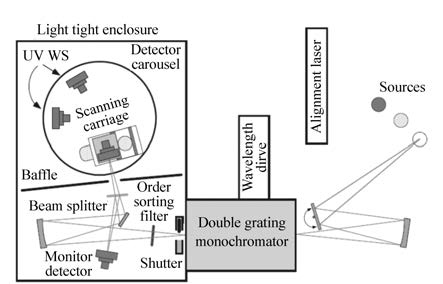
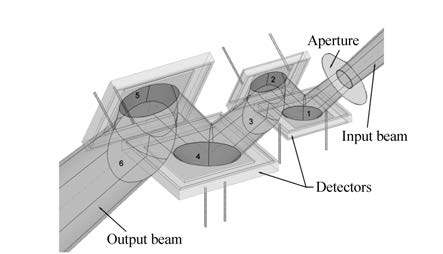
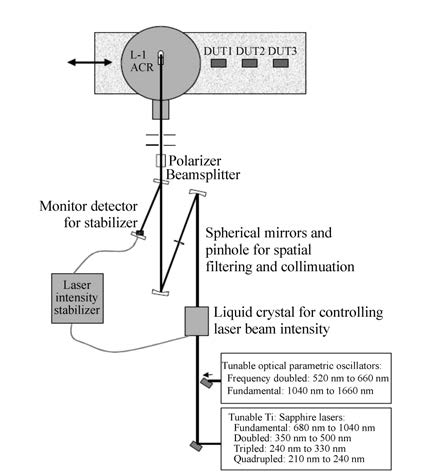
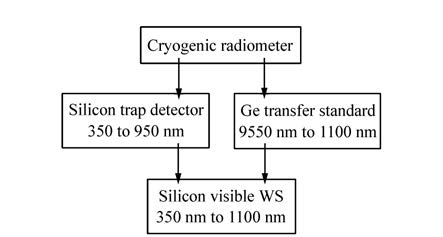
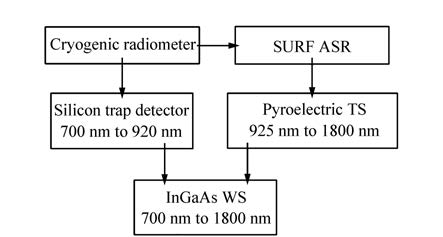
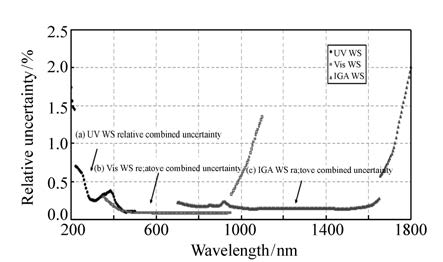
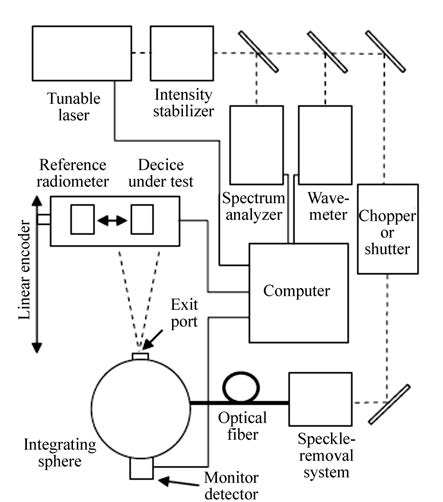
本文在评述低温绝对辐射计和SIRCUS发展的基础上,讨论了基于探测器标准的光谱可调谐自校准标准光源的工作原理、发展与应用前景。在探测器型光谱辐射标准研究方面,工作在液氦温度的低温绝对辐射计不确定度达0.01%。美国国家标准与技术研究院(NIST)建立的均匀光源光谱辐照度和光谱辐亮度响应度定标装置(SIRCUS)采用一系列激光器,由低温绝对辐射计传递的硅陷阱探测器定标,不确定度已达到0.1%,成功应用于空间遥感仪器高精度辐射定标。分析认为,发展中的基于探测器标准的光谱可调谐自校准标准光源,定标精度高,自行校正老化、衰减,保证了定标精度长期稳定。
本文在评述低温绝对辐射计和SIRCUS发展的基础上,讨论了基于探测器标准的光谱可调谐自校准标准光源的工作原理、发展与应用前景。在探测器型光谱辐射标准研究方面,工作在液氦温度的低温绝对辐射计不确定度达0.01%。美国国家标准与技术研究院(NIST)建立的均匀光源光谱辐照度和光谱辐亮度响应度定标装置(SIRCUS)采用一系列激光器,由低温绝对辐射计传递的硅陷阱探测器定标,不确定度已达到0.1%,成功应用于空间遥感仪器高精度辐射定标。分析认为,发展中的基于探测器标准的光谱可调谐自校准标准光源,定标精度高,自行校正老化、衰减,保证了定标精度长期稳定。








2015, 8(6): 919-925.
doi: 10.3788/CO.20150806.0919
摘要:
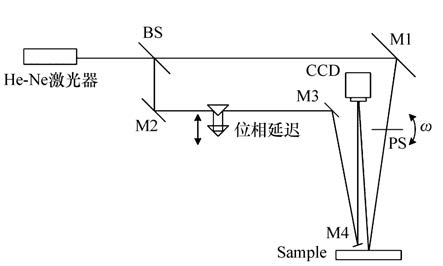
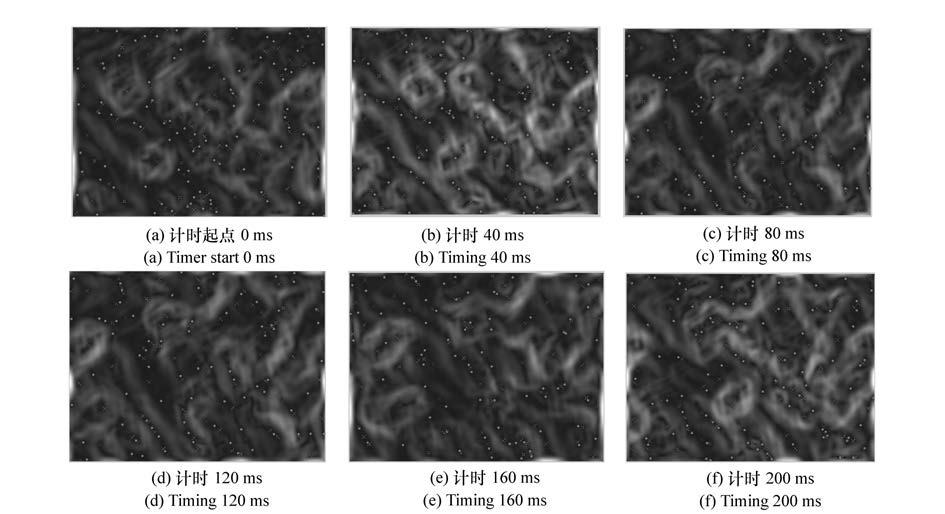
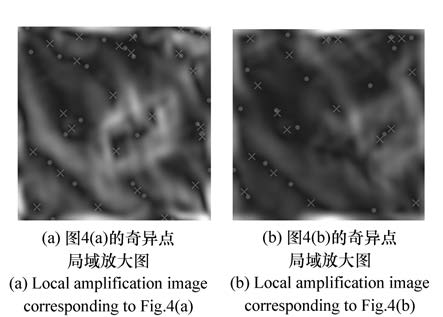
通过对由纳米磁流体运动引起的双扫描激光散斑干涉光场及其变化做拉盖尔-高斯滤波下的傅里叶变换,获得动态散斑干涉图对应的光学涡旋分布及变化特征。分析认为,光学涡旋分布及变化对应着由纳米磁微粒及其团族的运动所引起的动态散斑变化。当纳米磁微粒聚集到分散的过程中,动态激光散斑光场的奇异场分布发生相应变化,说明了磁流体运动过程对应涡旋密度有先大后小,再由小变大的两个变化;并且光学涡旋密度高,对应较小颗粒的散斑场,磁流体处于稳态的状况;光学涡旋密度低,对应较大颗粒的散斑场,对应着磁流体激烈的运动。研究结果体现了奇异场分布变化和纳米磁流体动后趋稳的过程存在对应关系。
通过对由纳米磁流体运动引起的双扫描激光散斑干涉光场及其变化做拉盖尔-高斯滤波下的傅里叶变换,获得动态散斑干涉图对应的光学涡旋分布及变化特征。分析认为,光学涡旋分布及变化对应着由纳米磁微粒及其团族的运动所引起的动态散斑变化。当纳米磁微粒聚集到分散的过程中,动态激光散斑光场的奇异场分布发生相应变化,说明了磁流体运动过程对应涡旋密度有先大后小,再由小变大的两个变化;并且光学涡旋密度高,对应较小颗粒的散斑场,磁流体处于稳态的状况;光学涡旋密度低,对应较大颗粒的散斑场,对应着磁流体激烈的运动。研究结果体现了奇异场分布变化和纳米磁流体动后趋稳的过程存在对应关系。

2015, 8(6): 926-932.
doi: 10.3788/CO.20150806.0926
摘要:
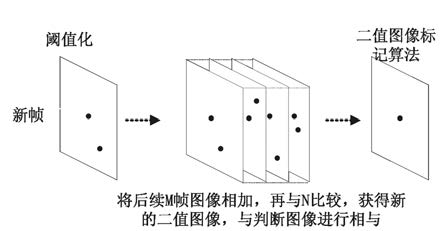
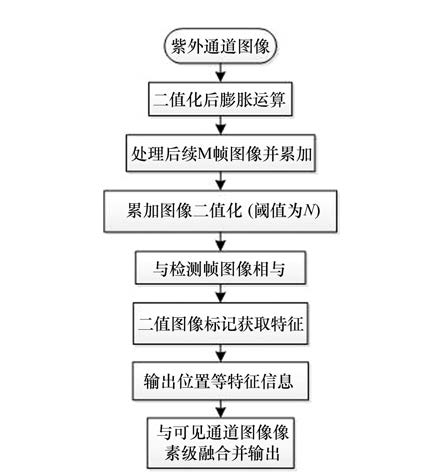
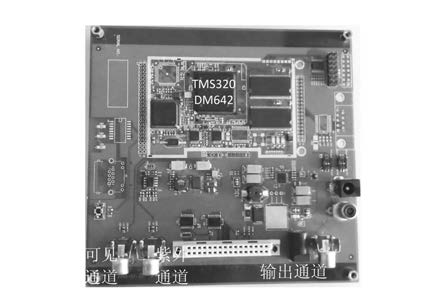
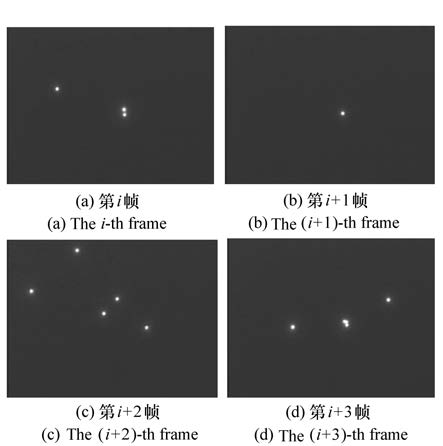
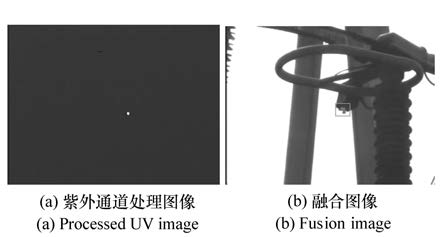
针对目前商用日盲紫外/可见光双谱段电晕探测仪对故障的判定效率低且容易受噪声干扰问题,本文提出了一种微弱日盲紫外电晕自动实时检测方法。在分析电晕目标和噪声时间域统计特性的基础上,该方法利用电晕目标在时间域连续的特点,首先完成灰度图像二值化、形态学膨胀等预处理,其次将N帧连续图像累加后阈值化,最后进行特征提取,获取电晕位置、面积等特征信息,实现电晕的自动实时检测。在完成设备辐射标定的基础上,可立即回溯得到故障的光子计数参考值。建立了该方法的探测概率、虚警率数学模型。将其在高速数字处理平台TMS320DM642上实现并输入测试视频,结果表明:在典型参数情况下该方法单次检测虚警概率为2.85×10-5,处理时间小于120 ms,可实现微弱日盲紫外电晕的实时检测。
针对目前商用日盲紫外/可见光双谱段电晕探测仪对故障的判定效率低且容易受噪声干扰问题,本文提出了一种微弱日盲紫外电晕自动实时检测方法。在分析电晕目标和噪声时间域统计特性的基础上,该方法利用电晕目标在时间域连续的特点,首先完成灰度图像二值化、形态学膨胀等预处理,其次将N帧连续图像累加后阈值化,最后进行特征提取,获取电晕位置、面积等特征信息,实现电晕的自动实时检测。在完成设备辐射标定的基础上,可立即回溯得到故障的光子计数参考值。建立了该方法的探测概率、虚警率数学模型。将其在高速数字处理平台TMS320DM642上实现并输入测试视频,结果表明:在典型参数情况下该方法单次检测虚警概率为2.85×10-5,处理时间小于120 ms,可实现微弱日盲紫外电晕的实时检测。


2015, 8(6): 933-941.
doi: 10.3788/CO.20150806.0933
摘要:
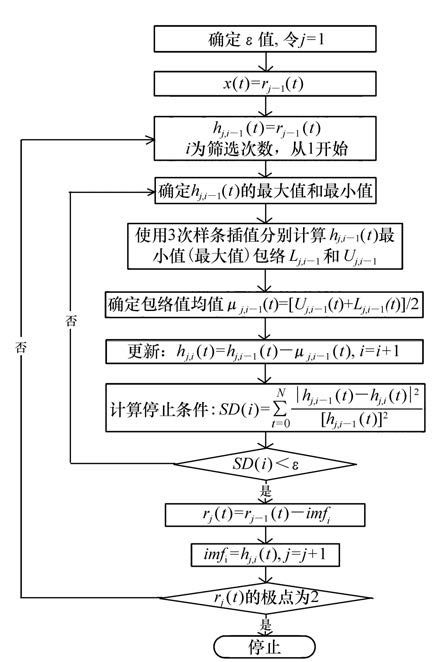
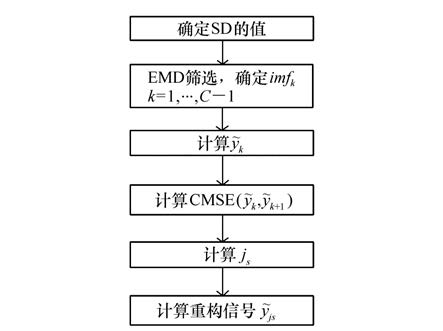
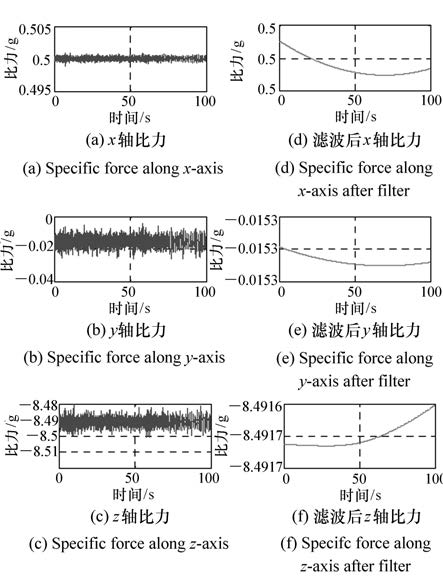
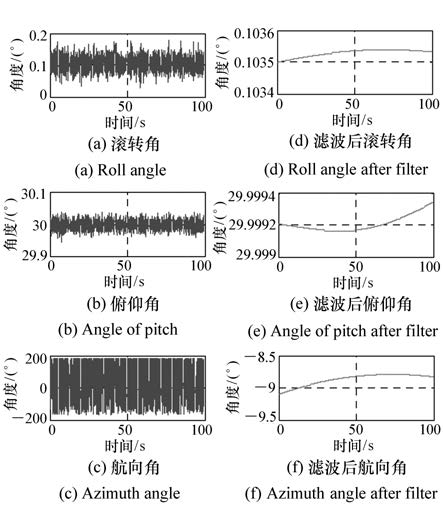
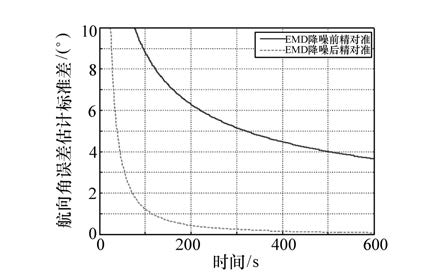
为了实现低成本SINS初始对准,降低对准过程复杂程度,提高系统对准精度,缩短对准时间,本文引入了EMD滤波技术。首先,采集IMU输出信号,根据EMD算法将信号分解为IMF簇,按照CMSE标准对信号进行重构,完成信号滤波处理;接着,按照AR模型对经EMD滤波前后的数据噪声进行建模;然后,分别利用原始信号和EMD降噪后信号进行SINS姿态粗对准;最后,根据IMU模型和SINS误差模型,采用零速对准方式,完成SINS精对准。实验结果表明:经EMD降噪后的信号粗对准精度为1.3°,精对准精度为0.87 mrad,精对准收敛时间为200 s。
为了实现低成本SINS初始对准,降低对准过程复杂程度,提高系统对准精度,缩短对准时间,本文引入了EMD滤波技术。首先,采集IMU输出信号,根据EMD算法将信号分解为IMF簇,按照CMSE标准对信号进行重构,完成信号滤波处理;接着,按照AR模型对经EMD滤波前后的数据噪声进行建模;然后,分别利用原始信号和EMD降噪后信号进行SINS姿态粗对准;最后,根据IMU模型和SINS误差模型,采用零速对准方式,完成SINS精对准。实验结果表明:经EMD降噪后的信号粗对准精度为1.3°,精对准精度为0.87 mrad,精对准收敛时间为200 s。



2015, 8(6): 942-950.
doi: 10.3788/CO.20150806.0942
摘要:
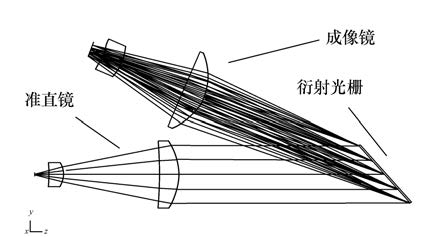
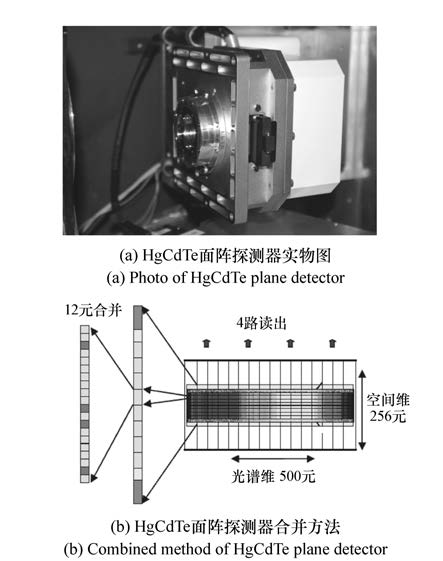
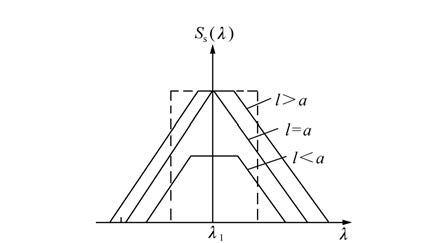
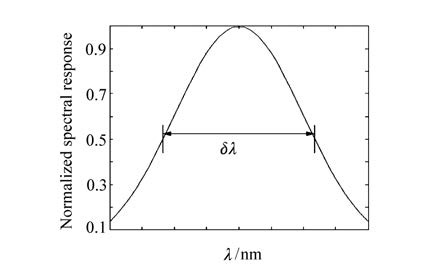
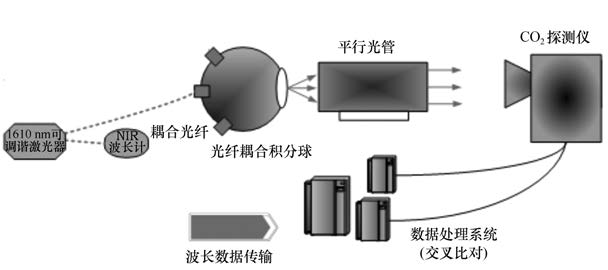
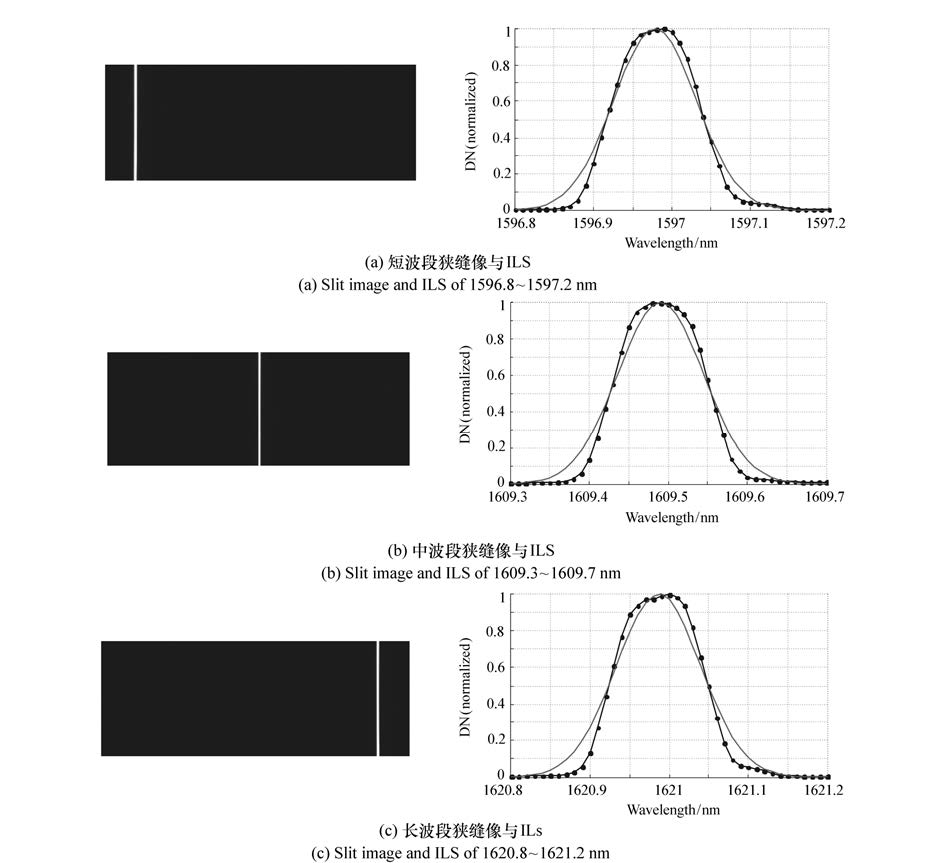
基于能量集中度的装调方法采用一套由可调谐激光器、积分球、平行光管和数据采集处理软件等组成的精细定焦系统,以确定CO2探测仪1 610 nm通道光谱仪的最佳焦面位置并完成探测器的精确安装,以像元光谱响应曲线(ILS)的全高半宽度(FWHM)作为聚焦评价函数,通过调整探测器方位遍历搜寻该函数最小值并作为正焦的最终评价依据,进而完成光谱仪的精细定焦任务。定焦结果显示:探测器获得的光谱响应曲线平均半宽度为0.128 1 nm,与理论值吻合良好。该系统不仅操作简单、结构紧凑且具有较高的定焦精度,也为光谱仪定标等后续工作提供了实验保障。
基于能量集中度的装调方法采用一套由可调谐激光器、积分球、平行光管和数据采集处理软件等组成的精细定焦系统,以确定CO2探测仪1 610 nm通道光谱仪的最佳焦面位置并完成探测器的精确安装,以像元光谱响应曲线(ILS)的全高半宽度(FWHM)作为聚焦评价函数,通过调整探测器方位遍历搜寻该函数最小值并作为正焦的最终评价依据,进而完成光谱仪的精细定焦任务。定焦结果显示:探测器获得的光谱响应曲线平均半宽度为0.128 1 nm,与理论值吻合良好。该系统不仅操作简单、结构紧凑且具有较高的定焦精度,也为光谱仪定标等后续工作提供了实验保障。

2015, 8(6): 951-956.
doi: 10.3788/CO.20150806.0951
摘要:
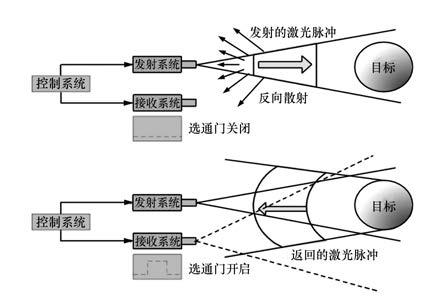
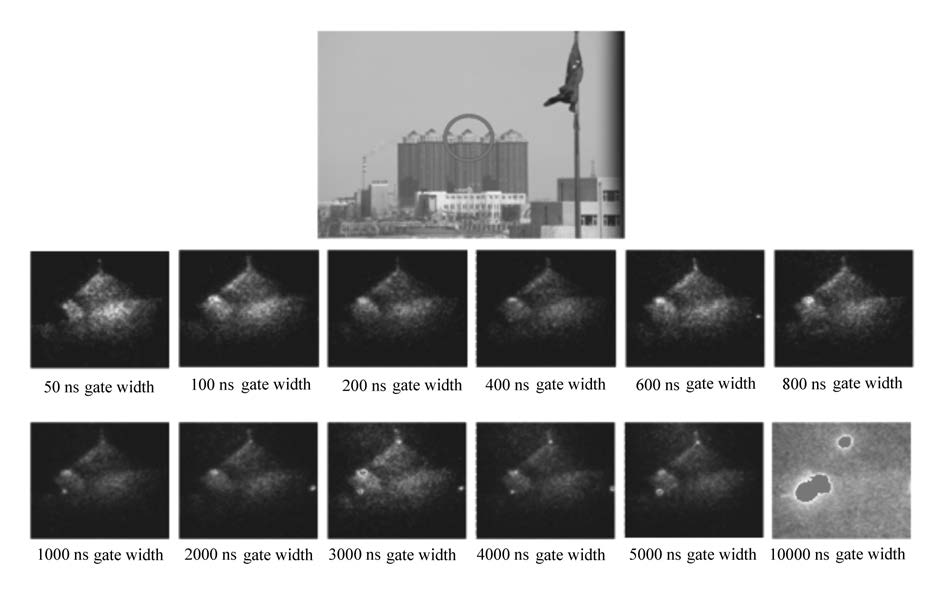
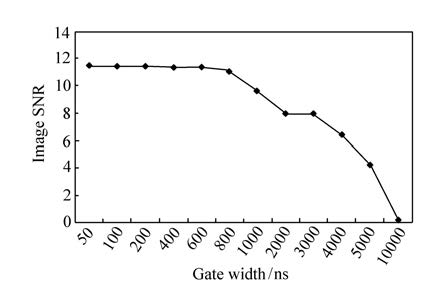
为了解不同激光测距精度下的选通成像信噪比,本文利用外场实验系统对不同门宽条件下的图像信噪比进行了分析。首先,根据激光距离选通成像理论建立作用距离模型,初步确定系统各项参数。在此基础上,构建外场实验系统,并利用实验系统进行外场实验研究。对不同门宽条件下的图像进行分析对比,获得门宽与图像信噪比关系曲线。实验结果表明:在门宽2 μs范围内,图像信噪比≥8,图像质量满足自动识别要求,充分证明了距离选通成像系统对测距精度要求较低,完全满足实际应用需求。
为了解不同激光测距精度下的选通成像信噪比,本文利用外场实验系统对不同门宽条件下的图像信噪比进行了分析。首先,根据激光距离选通成像理论建立作用距离模型,初步确定系统各项参数。在此基础上,构建外场实验系统,并利用实验系统进行外场实验研究。对不同门宽条件下的图像进行分析对比,获得门宽与图像信噪比关系曲线。实验结果表明:在门宽2 μs范围内,图像信噪比≥8,图像质量满足自动识别要求,充分证明了距离选通成像系统对测距精度要求较低,完全满足实际应用需求。

2015, 8(6): 957-963.
doi: 10.3788/CO.20150806.0957
摘要:
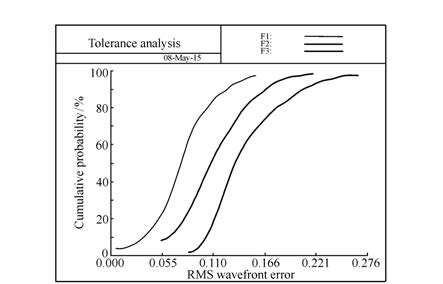
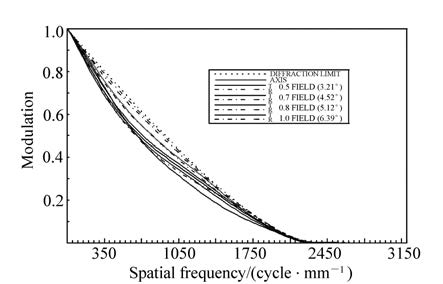
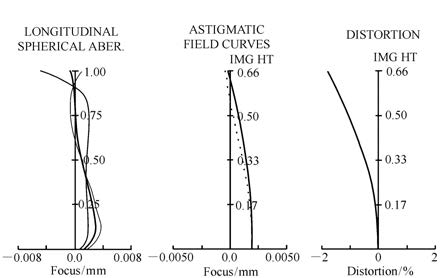
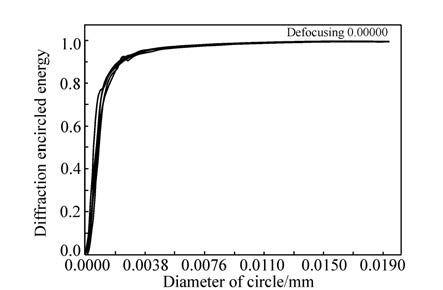
为解决普通生物显微物镜视场小、场曲和色差严重的问题,本文利用光学软件Code V设计了一款20×平场复消色差显微物镜,通过合理的结构优化、光焦度分配及材料选择,使该物镜具有大视场、高数值孔径、平场复消色差的特点。设计分析结果表明,该物镜平场数为0.11 μm,最大焦移量为0.5 μm,满足显微物镜国际标准的规定;光学传递函数(MTF)曲线与理论衍射极限接近,达到指标要求,该物镜在可见光范围内实现了平场复消色差设计。公差分析结果表明RMS波前差劣化至0.24λ,能够满足加工和实际应用要求。
为解决普通生物显微物镜视场小、场曲和色差严重的问题,本文利用光学软件Code V设计了一款20×平场复消色差显微物镜,通过合理的结构优化、光焦度分配及材料选择,使该物镜具有大视场、高数值孔径、平场复消色差的特点。设计分析结果表明,该物镜平场数为0.11 μm,最大焦移量为0.5 μm,满足显微物镜国际标准的规定;光学传递函数(MTF)曲线与理论衍射极限接近,达到指标要求,该物镜在可见光范围内实现了平场复消色差设计。公差分析结果表明RMS波前差劣化至0.24λ,能够满足加工和实际应用要求。


2015, 8(6): 964-970.
doi: 10.3788/CO.20150806.0964
摘要:
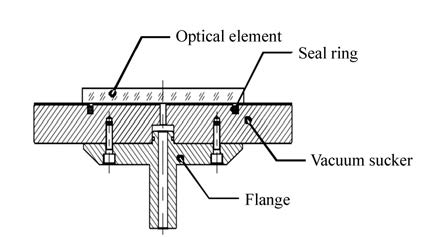
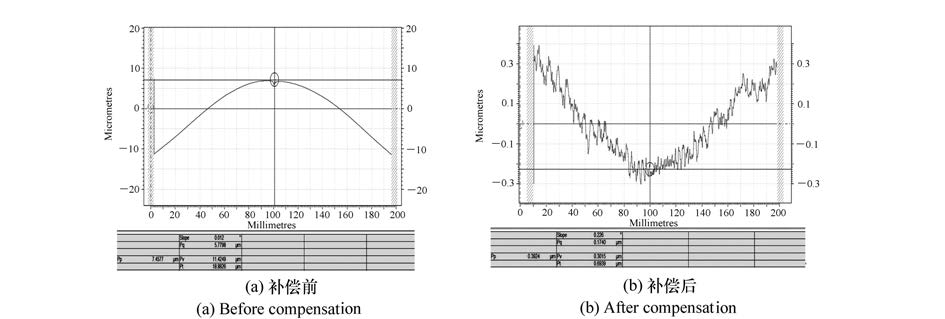
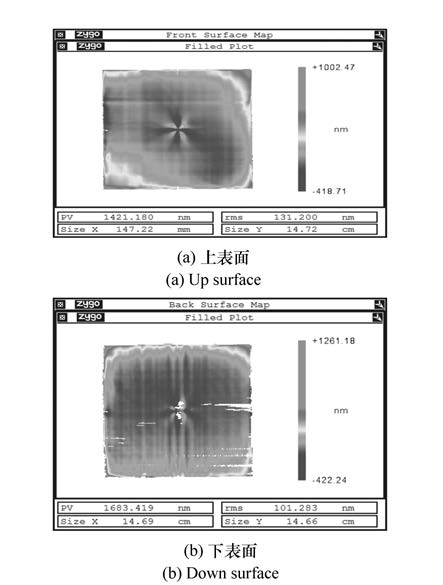
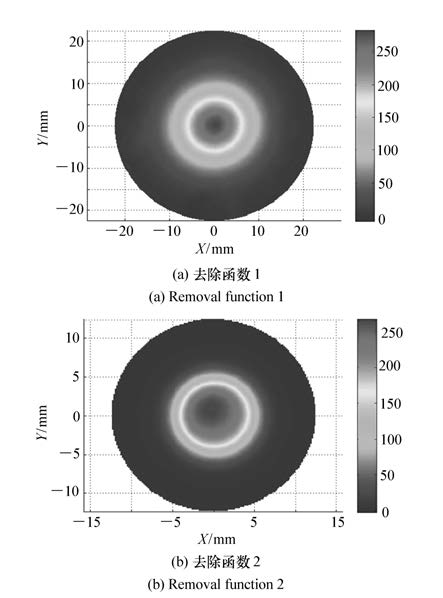
针对超薄光学元件在加工过程中因重力和磨头产生应力形变的特点,提出了一种高效、先进的超薄光学元件综合加工方法。该方法综合运用了精密铣磨、精密抛光、离子束修形等先进技术进行面形控制。在铣磨阶段采用受力分析和误差补偿的方法降低了元件变形引入的面形误差;在抛光阶段通过气囊抛光和沥青抛光的迭代实现了面形快速收敛;在离子束加工阶段充分利用其非接触、无应力的加工特点实现了高精度面形修正。实验选择径厚比为34(边长152 mm,厚度6.35 mm)的方形融石英材料进行加工实验。结果表明:在铣磨、抛光、修形阶段的各项指标都达到了精密光学元件的加工水平,最终的面形精度为PV=25 nm,RMS=1.5 nm。该加工方法可以广泛应用于超薄光学元件的高精度加工。
针对超薄光学元件在加工过程中因重力和磨头产生应力形变的特点,提出了一种高效、先进的超薄光学元件综合加工方法。该方法综合运用了精密铣磨、精密抛光、离子束修形等先进技术进行面形控制。在铣磨阶段采用受力分析和误差补偿的方法降低了元件变形引入的面形误差;在抛光阶段通过气囊抛光和沥青抛光的迭代实现了面形快速收敛;在离子束加工阶段充分利用其非接触、无应力的加工特点实现了高精度面形修正。实验选择径厚比为34(边长152 mm,厚度6.35 mm)的方形融石英材料进行加工实验。结果表明:在铣磨、抛光、修形阶段的各项指标都达到了精密光学元件的加工水平,最终的面形精度为PV=25 nm,RMS=1.5 nm。该加工方法可以广泛应用于超薄光学元件的高精度加工。




2015, 8(6): 971-979.
doi: 10.3788/CO.20150806.0971
摘要:
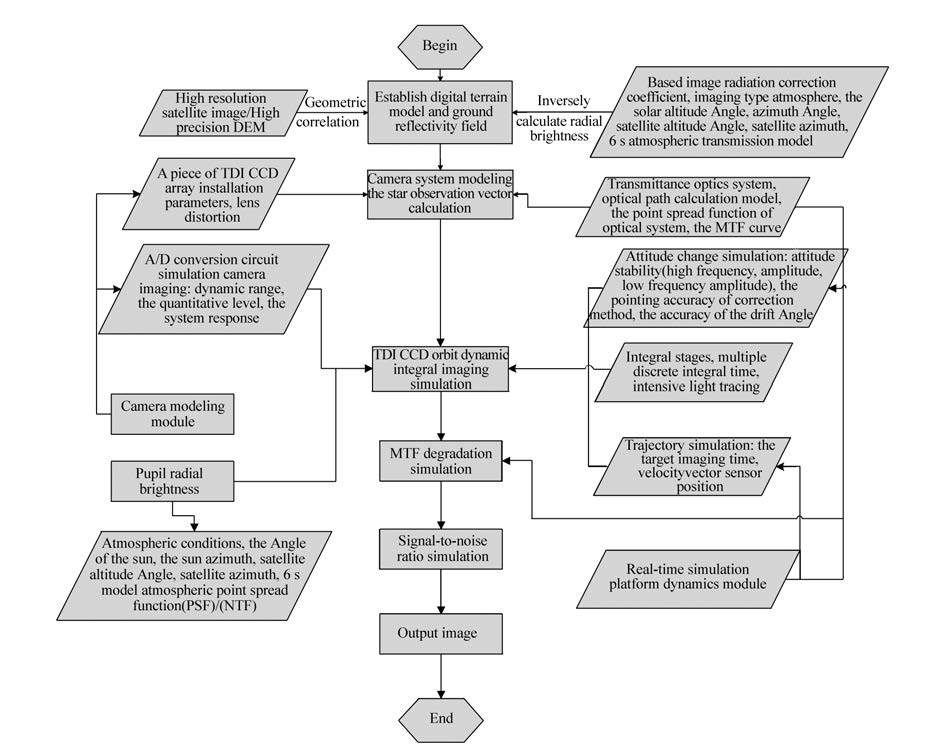
基于在轨成像物理机理的立体测绘相机成像建模与仿真综合考虑了大气辐射传输、卫星运行平台、光学系统成像、相机辐射响应等各个环节,采用数值模拟技术进行精确建模,可用于进行成像过程端到端的完整分析,评估成像系统设计可行性及成像质量。本文以可见光立体测绘相机为例,采用高精度高、分辨率地表物理模型作为输入源,首先结合立体测绘相机内外方位元素计算正视相机和前视相机CCD光敏面各亚像元区域中心的观测向量,然后根据目标相机的成像参数得到地面目标在相机入瞳处的辐亮度,最后通过光线追迹算法和光学系统点扩散函数模型计算探测器靶面的辐通量,经由探测器辐射响应模型得到数字影像。实验结果表明,正视相机几何物理模型定位精度达124 m,前视相机定位精度达193 m,能够较为可靠地模拟出立体影像,模拟方法可行。
基于在轨成像物理机理的立体测绘相机成像建模与仿真综合考虑了大气辐射传输、卫星运行平台、光学系统成像、相机辐射响应等各个环节,采用数值模拟技术进行精确建模,可用于进行成像过程端到端的完整分析,评估成像系统设计可行性及成像质量。本文以可见光立体测绘相机为例,采用高精度高、分辨率地表物理模型作为输入源,首先结合立体测绘相机内外方位元素计算正视相机和前视相机CCD光敏面各亚像元区域中心的观测向量,然后根据目标相机的成像参数得到地面目标在相机入瞳处的辐亮度,最后通过光线追迹算法和光学系统点扩散函数模型计算探测器靶面的辐通量,经由探测器辐射响应模型得到数字影像。实验结果表明,正视相机几何物理模型定位精度达124 m,前视相机定位精度达193 m,能够较为可靠地模拟出立体影像,模拟方法可行。



2015, 8(6): 980-987.
doi: 10.3788/CO.20150806.0980
摘要:
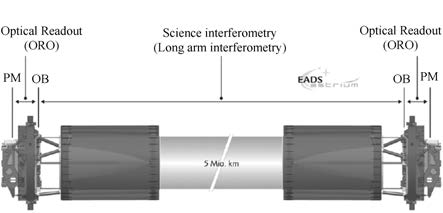
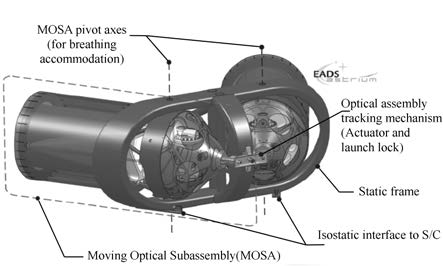
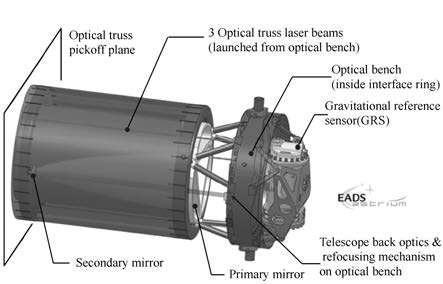
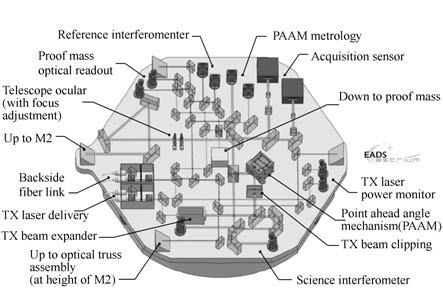
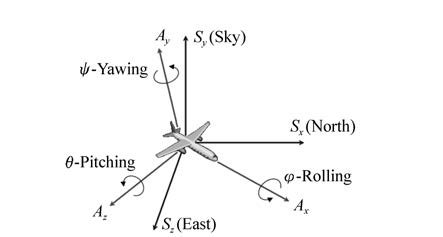
为了验证广义相对论,世界各国竞相开展了空间引力波探测方面的研究。本文以欧洲空间引力波探测LISA(Laser Interferometer Space Antenna)计划为例,根据基线设计,对LISA系统有效载荷及主要组件的设计进行了分析和阐述。LISA主要探测和研究低频引力波辐射,其工作频段为10-3~1 Hz,工作距离为5×106 km,预计能探测到双致密星系统以及星系合并引起的超大质量并合等波源,测距精度达到pm量级。以上研究希望能对我国未来的空间引力波探测计划有一定启示。
为了验证广义相对论,世界各国竞相开展了空间引力波探测方面的研究。本文以欧洲空间引力波探测LISA(Laser Interferometer Space Antenna)计划为例,根据基线设计,对LISA系统有效载荷及主要组件的设计进行了分析和阐述。LISA主要探测和研究低频引力波辐射,其工作频段为10-3~1 Hz,工作距离为5×106 km,预计能探测到双致密星系统以及星系合并引起的超大质量并合等波源,测距精度达到pm量级。以上研究希望能对我国未来的空间引力波探测计划有一定启示。

2015, 8(6): 988-996.
doi: 10.3788/CO.20150806.0988
摘要:
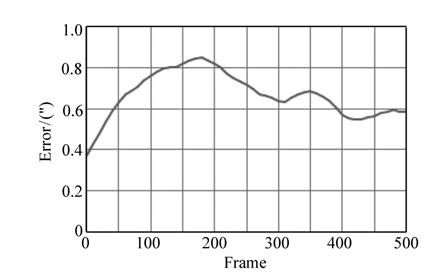
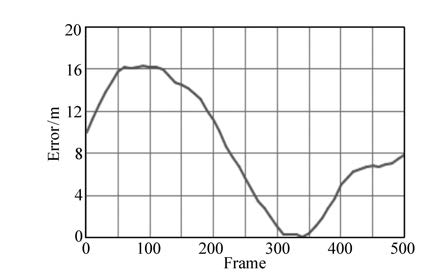
根据直线交会测量原理,构建了机载光电平台目标定位数学模型。首先建立5个坐标系,确定了坐标系之间的变换关系,在地心直角坐标系下,根据光电平台观测目标的方位和俯仰角度参数,结合飞机的位置和姿态测量参数,通过坐标变换确定从光电平台到目标之间的观测直线方程。选择一组目标观测直线建立目标交会测量目标函数,根据最小二乘原理,建立关于直线交会点坐标的线性方程组。解出直线交会点的三维坐标并根据从地心直角坐标系到大地地理坐标系的变换关系,计算目标的大地经纬度和高程坐标,通过样本数据进行交会定位精度实验。实验结果表明,本文方法定位结果和实际测量数据接近,经度误差为0.65",纬度误差为0.82",高程误差为5 m,验证了本文方法的准确性。本文方法有效可行,对机载光电平台目标定位具有实用价值。
根据直线交会测量原理,构建了机载光电平台目标定位数学模型。首先建立5个坐标系,确定了坐标系之间的变换关系,在地心直角坐标系下,根据光电平台观测目标的方位和俯仰角度参数,结合飞机的位置和姿态测量参数,通过坐标变换确定从光电平台到目标之间的观测直线方程。选择一组目标观测直线建立目标交会测量目标函数,根据最小二乘原理,建立关于直线交会点坐标的线性方程组。解出直线交会点的三维坐标并根据从地心直角坐标系到大地地理坐标系的变换关系,计算目标的大地经纬度和高程坐标,通过样本数据进行交会定位精度实验。实验结果表明,本文方法定位结果和实际测量数据接近,经度误差为0.65",纬度误差为0.82",高程误差为5 m,验证了本文方法的准确性。本文方法有效可行,对机载光电平台目标定位具有实用价值。



2015, 8(6): 997-1003.
doi: 10.3788/CO.20150806.0997
摘要:
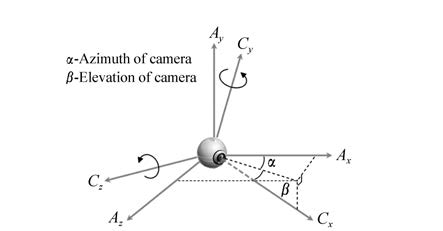
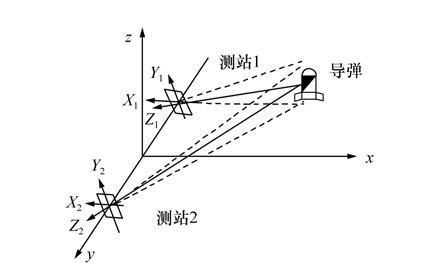
针对导弹发射姿态测量问题,提出采用高速摄像机通过斜瞄和平瞄姿态测量方法求解导弹中轴线俯仰角和方位角,仿真典型导弹起飞段近距离姿态测量,分析两种测量方法对导弹飞行姿态测量精度和适用性。仿真结果表明:平瞄和斜瞄姿态测量方法,测量误差在0.2°以内。斜瞄方式使用更便捷,通用性好。平瞄方式测量精度高,数据处理方法、机械结构相对简单,在适合的应用场合优势明显。此分析方法、分析结果为姿态测量方法选取和研究等提供一种可行的途径,也可为其它运动目标的姿态测量提供借鉴。
针对导弹发射姿态测量问题,提出采用高速摄像机通过斜瞄和平瞄姿态测量方法求解导弹中轴线俯仰角和方位角,仿真典型导弹起飞段近距离姿态测量,分析两种测量方法对导弹飞行姿态测量精度和适用性。仿真结果表明:平瞄和斜瞄姿态测量方法,测量误差在0.2°以内。斜瞄方式使用更便捷,通用性好。平瞄方式测量精度高,数据处理方法、机械结构相对简单,在适合的应用场合优势明显。此分析方法、分析结果为姿态测量方法选取和研究等提供一种可行的途径,也可为其它运动目标的姿态测量提供借鉴。


2015, 8(6): 1004-1012.
doi: 10.3788/CO.20150806.1004
摘要:
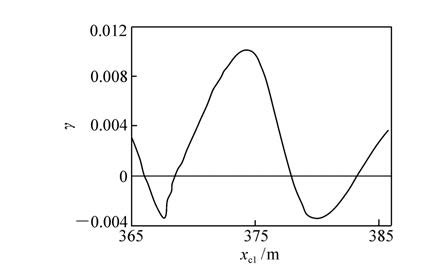
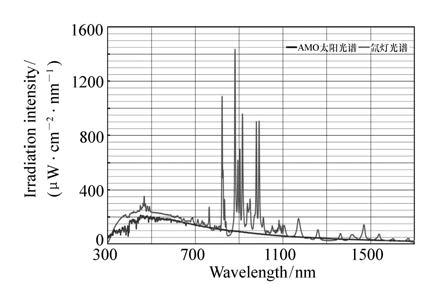
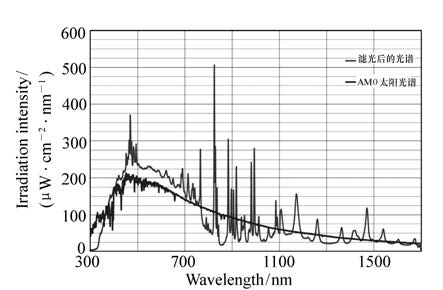
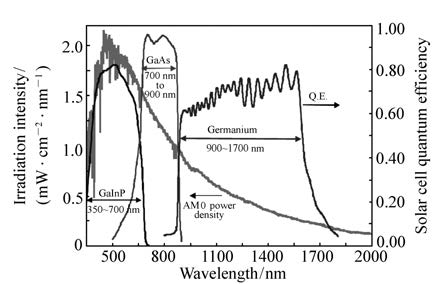
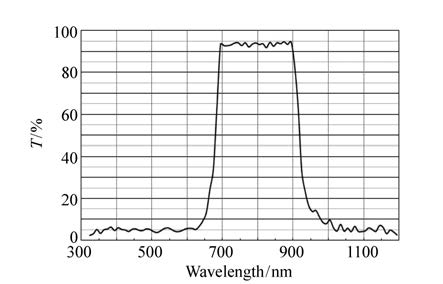
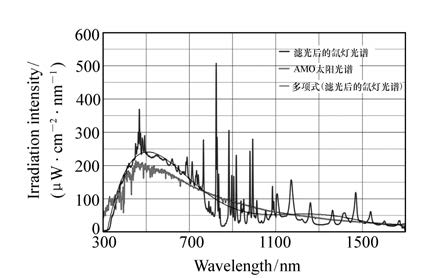
本文设计并研制了一种实用型三谱段太阳模拟器,其光谱匹配可同时调整3个谱段(300~700 nm,700~900 nm,900~1 700 nm)范围的能量,修正后可满足三结砷化镓太阳电池的测试使用要求。本文重点阐述了三谱段太阳模拟器滤光片的设计和氙灯光谱的修正及测试,介绍了太阳模拟器的光机结构。实验表明:三谱段太阳模拟器的光谱匹配满足三结砷化镓太阳电池各子电池的响应电流值。在有效辐照面150 mm×150 mm上,平均辐照度可以达到2个太阳常数(2 730 W/m2),辐照不均匀度达到±1.77%,辐照不稳定度达到±0.83%,为太阳电池自动分拣系统提供了可靠稳定的平台。
本文设计并研制了一种实用型三谱段太阳模拟器,其光谱匹配可同时调整3个谱段(300~700 nm,700~900 nm,900~1 700 nm)范围的能量,修正后可满足三结砷化镓太阳电池的测试使用要求。本文重点阐述了三谱段太阳模拟器滤光片的设计和氙灯光谱的修正及测试,介绍了太阳模拟器的光机结构。实验表明:三谱段太阳模拟器的光谱匹配满足三结砷化镓太阳电池各子电池的响应电流值。在有效辐照面150 mm×150 mm上,平均辐照度可以达到2个太阳常数(2 730 W/m2),辐照不均匀度达到±1.77%,辐照不稳定度达到±0.83%,为太阳电池自动分拣系统提供了可靠稳定的平台。










2015, 8(6): 1013-1019.
doi: 10.3788/CO.20150806.1013
摘要:
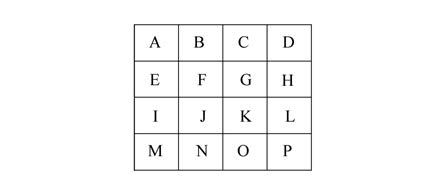
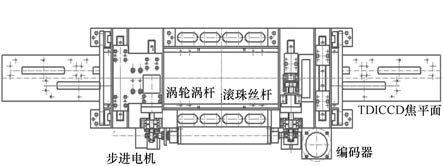
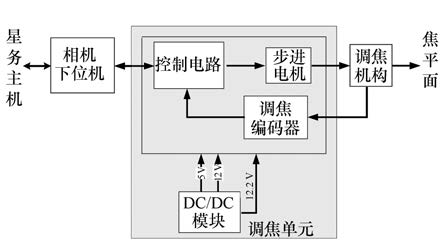
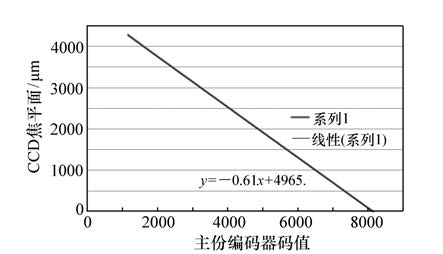
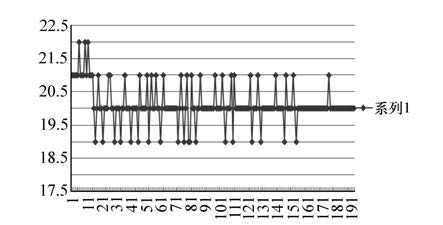
本文详细介绍了一种基于卫星平台的对地观测高分辨率空间TDICCD相机调焦控制系统的设计与实现。针对相机轨道标称值为644.6 km的太阳同步轨道,为实现对地全色成像2 m分辨率和多光谱成像8 m分辨率,推扫成像不小于100 km的地面覆盖宽度要求,采用8片TDICCD高精度交错拼接技术获得高分辨率相机焦平面,以实现对地推扫成像高分辨率和宽覆盖的要求。首先,介绍高分辨率TDICCD相机的离轴光学系统设计;然后,介绍相机调焦系统组成和TDICCD长焦平面拼接技术;最后,对相机调焦系统进行调焦精度测试,根据测试数据分析出相机调焦精度并与理论设计值进行比较分析,调焦,精度测试结果为±7.2 μm(3σ),满足高分辨率TDICCD相机在轨成像需要的高精度调焦要求。
本文详细介绍了一种基于卫星平台的对地观测高分辨率空间TDICCD相机调焦控制系统的设计与实现。针对相机轨道标称值为644.6 km的太阳同步轨道,为实现对地全色成像2 m分辨率和多光谱成像8 m分辨率,推扫成像不小于100 km的地面覆盖宽度要求,采用8片TDICCD高精度交错拼接技术获得高分辨率相机焦平面,以实现对地推扫成像高分辨率和宽覆盖的要求。首先,介绍高分辨率TDICCD相机的离轴光学系统设计;然后,介绍相机调焦系统组成和TDICCD长焦平面拼接技术;最后,对相机调焦系统进行调焦精度测试,根据测试数据分析出相机调焦精度并与理论设计值进行比较分析,调焦,精度测试结果为±7.2 μm(3σ),满足高分辨率TDICCD相机在轨成像需要的高精度调焦要求。


2015, 8(6): 1020-1026.
doi: 10.3788/CO.20150806.1020
摘要:
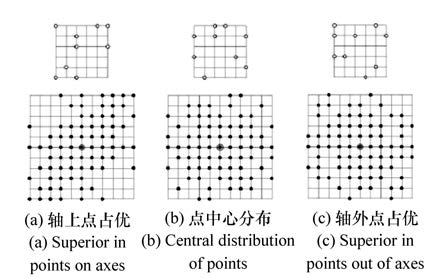
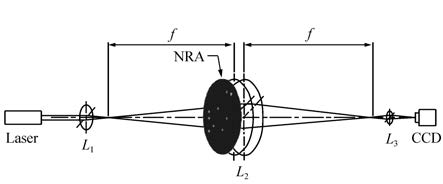
本文归纳了基于分波前干涉原理的具有代表性的干涉测量方法——杨氏双孔干涉法、逆波前杨氏干涉法和非冗余孔径阵列干涉测量法,以及基于分振幅干涉原理的干涉测量方法——自参考干涉测量法;介绍了各种测量方法的工作原理、实验配置;比较了4种测量方法的优缺点,并给出每种方法的最佳应用领域。本文结论可为根据对空间相干性测量的不同要求,选择合适的测量方法提供初步参考。
本文归纳了基于分波前干涉原理的具有代表性的干涉测量方法——杨氏双孔干涉法、逆波前杨氏干涉法和非冗余孔径阵列干涉测量法,以及基于分振幅干涉原理的干涉测量方法——自参考干涉测量法;介绍了各种测量方法的工作原理、实验配置;比较了4种测量方法的优缺点,并给出每种方法的最佳应用领域。本文结论可为根据对空间相干性测量的不同要求,选择合适的测量方法提供初步参考。





2015, 8(6): 1027-1034.
doi: 10.3788/CO.20150806.1027
摘要:
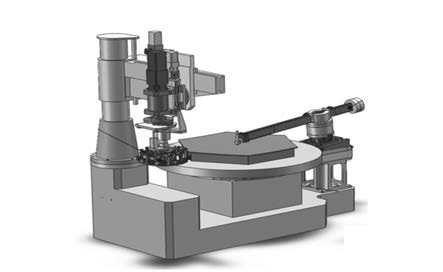
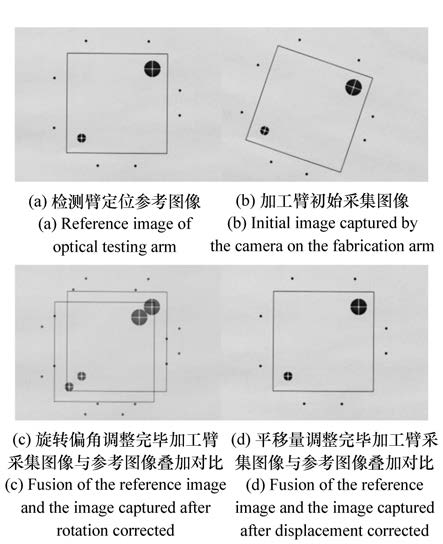
本文提出了基于特殊点对靶标的快速对准装置,实现机床加工臂和检测臂初始扫描位置自动高精度复位。靶标由外围区域四组放大倍率标定点对和中心区域大小对准点对组成;对准装置经初次使用前的畸变校正后,每次自动识别靶标区域完成自动对焦;根据外围点对进行放大倍率标定;自动识别中心大小点对并对其进行坐标定位;根据当前点对靶标位置计算与理想位置角度量和平移量偏差,指导机床转台和导轨互相配合,迭代调整直至完成精确对准。实验表明该方法对准精度约为5 μm,优于几十μm的机械定位精度,更利于实现超高精度光学加工的快速收敛,提高大口径反射镜加工效率。
本文提出了基于特殊点对靶标的快速对准装置,实现机床加工臂和检测臂初始扫描位置自动高精度复位。靶标由外围区域四组放大倍率标定点对和中心区域大小对准点对组成;对准装置经初次使用前的畸变校正后,每次自动识别靶标区域完成自动对焦;根据外围点对进行放大倍率标定;自动识别中心大小点对并对其进行坐标定位;根据当前点对靶标位置计算与理想位置角度量和平移量偏差,指导机床转台和导轨互相配合,迭代调整直至完成精确对准。实验表明该方法对准精度约为5 μm,优于几十μm的机械定位精度,更利于实现超高精度光学加工的快速收敛,提高大口径反射镜加工效率。



2015, 8(6): 1035-1043.
doi: 10.3788/CO.20150806.1035
摘要:
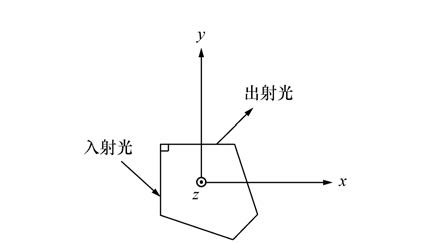
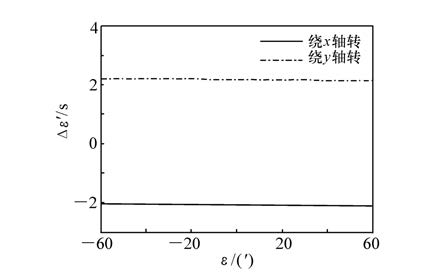
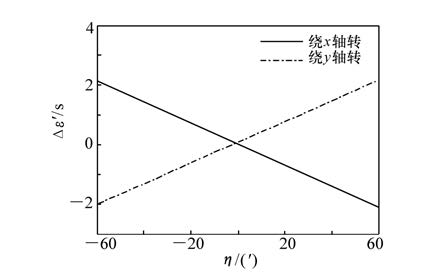
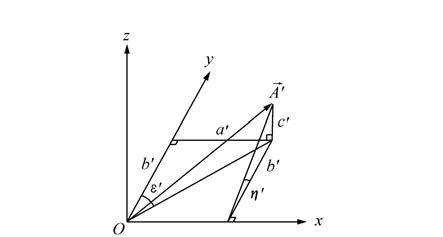
为了对大口径平面镜面形轮廓的五棱镜扫描法测试进行误差分析和修正,对五棱镜转动时出射光角度的变化进行了分析与精确计算。首先建立了合适的坐标系并规定了角度的正负,然后由入射光的偏摆角和俯仰角计算入射光向量,接着介绍了五棱镜的作用矩阵与坐标转换矩阵,在此基础上详细分析了五棱镜转动的整个过程并且计算了出射光向量。然后计算出射光的偏摆角和俯仰角,再计算当五棱镜没有转动时出射光的偏摆角和俯仰角。最后计算出射光偏摆角和俯仰角的变化。特别分析了当入射光垂直入射五棱镜的情况。随后进行了实际计算与实验,总结了出射光角度变化的一些规律。将计算数据与实验数据进行了比较,结果最大偏差为1"。最大偏差在实验精度范围内,证明了计算方法是正确的。
为了对大口径平面镜面形轮廓的五棱镜扫描法测试进行误差分析和修正,对五棱镜转动时出射光角度的变化进行了分析与精确计算。首先建立了合适的坐标系并规定了角度的正负,然后由入射光的偏摆角和俯仰角计算入射光向量,接着介绍了五棱镜的作用矩阵与坐标转换矩阵,在此基础上详细分析了五棱镜转动的整个过程并且计算了出射光向量。然后计算出射光的偏摆角和俯仰角,再计算当五棱镜没有转动时出射光的偏摆角和俯仰角。最后计算出射光偏摆角和俯仰角的变化。特别分析了当入射光垂直入射五棱镜的情况。随后进行了实际计算与实验,总结了出射光角度变化的一些规律。将计算数据与实验数据进行了比较,结果最大偏差为1"。最大偏差在实验精度范围内,证明了计算方法是正确的。



2015, 8(6): 1044-1050.
doi: 10.3788/CO.20150806.1044
摘要:
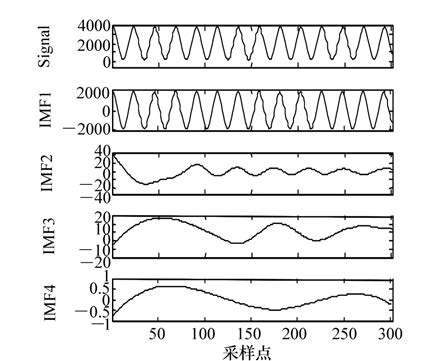
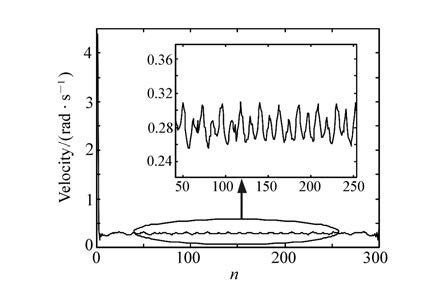
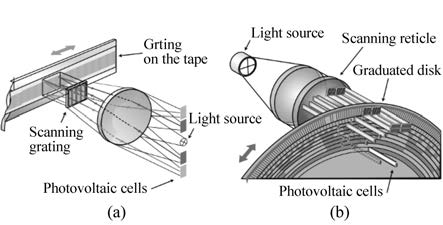
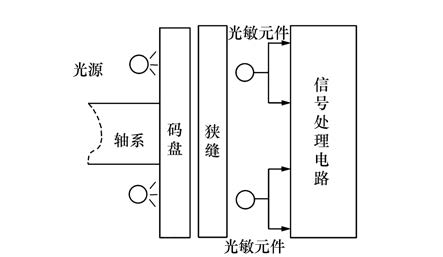
为了提高编码器的测速精度,研究了基于希尔伯特-黄变换的光电编码器单莫尔条纹测速方法。首先,利用AD采集编码器的单路莫尔条纹光电信号,并将信号序列通过EMD变换,滤除直流分量;然后,利用希尔伯特变换求出信号的相位变化,并通过差分运算求取信号的瞬时频率;最后,结合编码器的具体参数求取编码器的转速。实验结果表明:对某21位编码器进行测速实验,测速误差均方差由0.022 4 rad/s降低到0.013 4 rad/s。此方法测速稳定性高,抗干扰能力强,可用于速度精度要求较高的测速场合。
为了提高编码器的测速精度,研究了基于希尔伯特-黄变换的光电编码器单莫尔条纹测速方法。首先,利用AD采集编码器的单路莫尔条纹光电信号,并将信号序列通过EMD变换,滤除直流分量;然后,利用希尔伯特变换求出信号的相位变化,并通过差分运算求取信号的瞬时频率;最后,结合编码器的具体参数求取编码器的转速。实验结果表明:对某21位编码器进行测速实验,测速误差均方差由0.022 4 rad/s降低到0.013 4 rad/s。此方法测速稳定性高,抗干扰能力强,可用于速度精度要求较高的测速场合。