2024年 17卷 第3期
 摘要
摘要 HTML全文
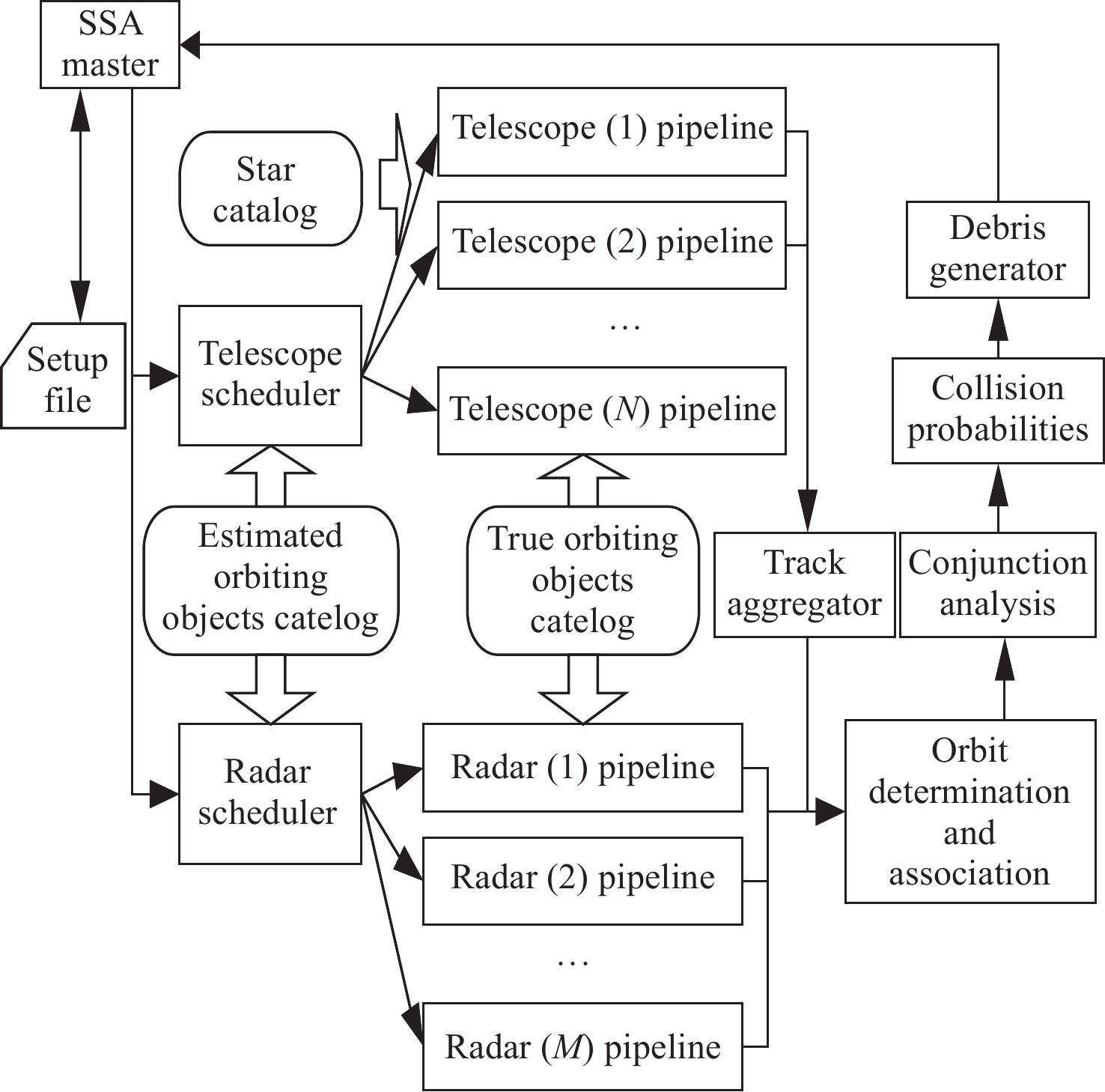
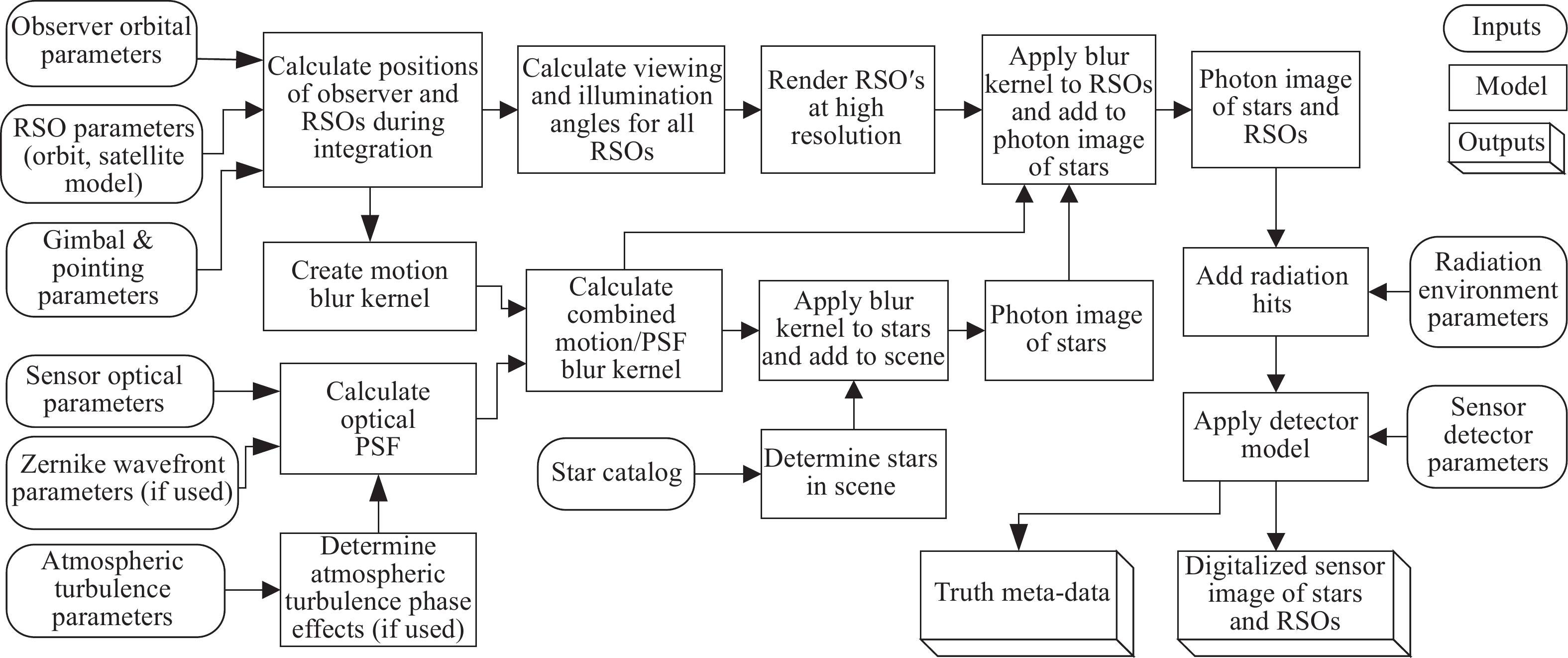
HTML全文空间态势感知(Space Situational Awareness, SSA)数据仿真可以为空间监测设备及态势感知算法(包括空间目标检测、跟踪、识别和表征)的开发、测试和验证提供关键性数据支持,在空间态势感知能力建设中发挥重要作用。本文以天基空间态势感知光学数据仿真为研究对象,给出了SSA数据仿真的研究目的和主要研究内容,详述了SSA光学成像仿真的典型研究方法与过程。介绍了国内外相关工作的研究现状与工作进展,涵盖双目视觉传感器、激光雷达、红外传感器、可见光望远镜和恒星敏感器等不同光学传感系统的成像建模与仿真工作成果。分析了空间态势感知数据仿真研究的发展趋势,为未来SSA数据仿真研究思路与方法提供参考。
 PDF 25553KB
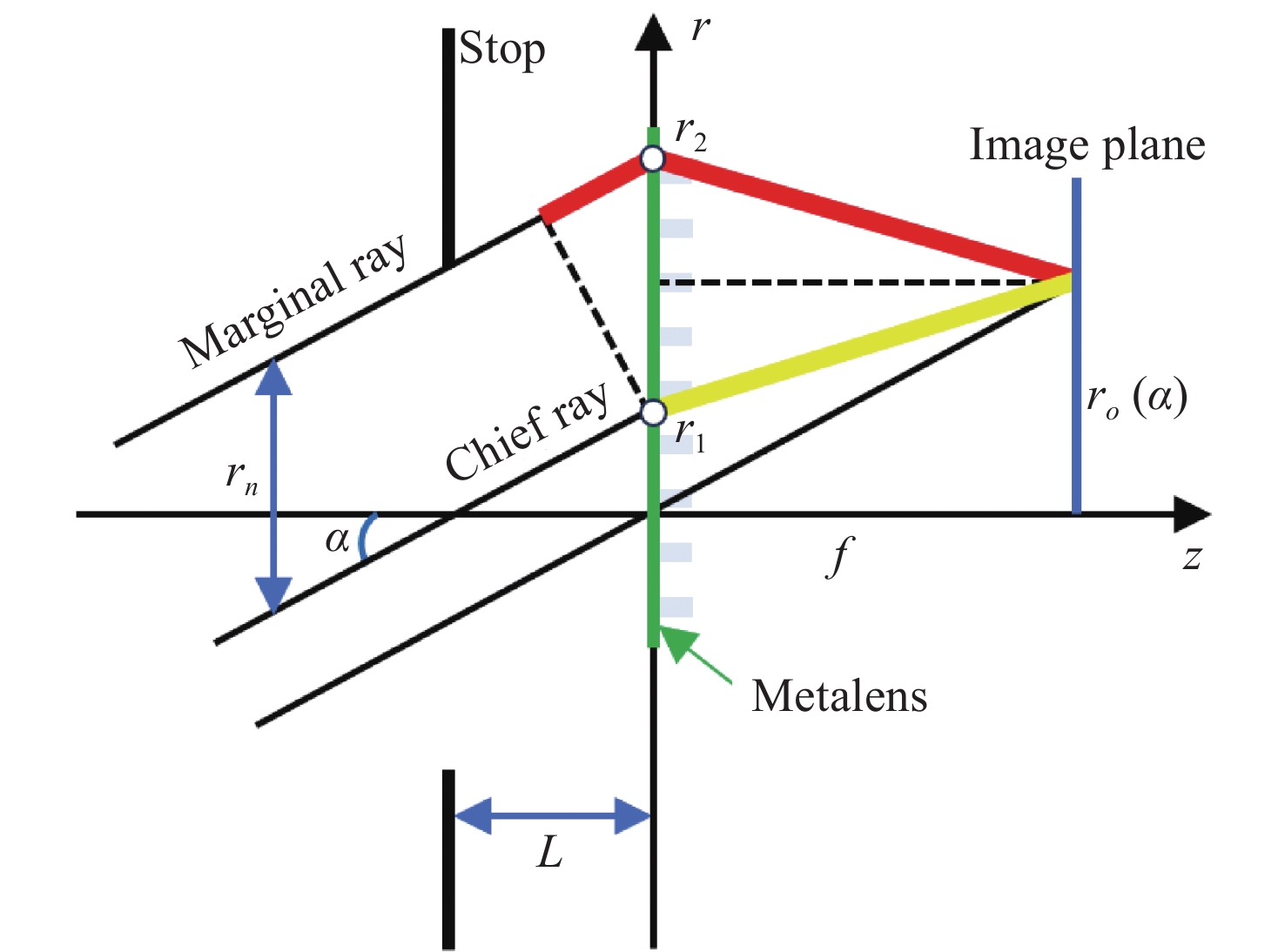
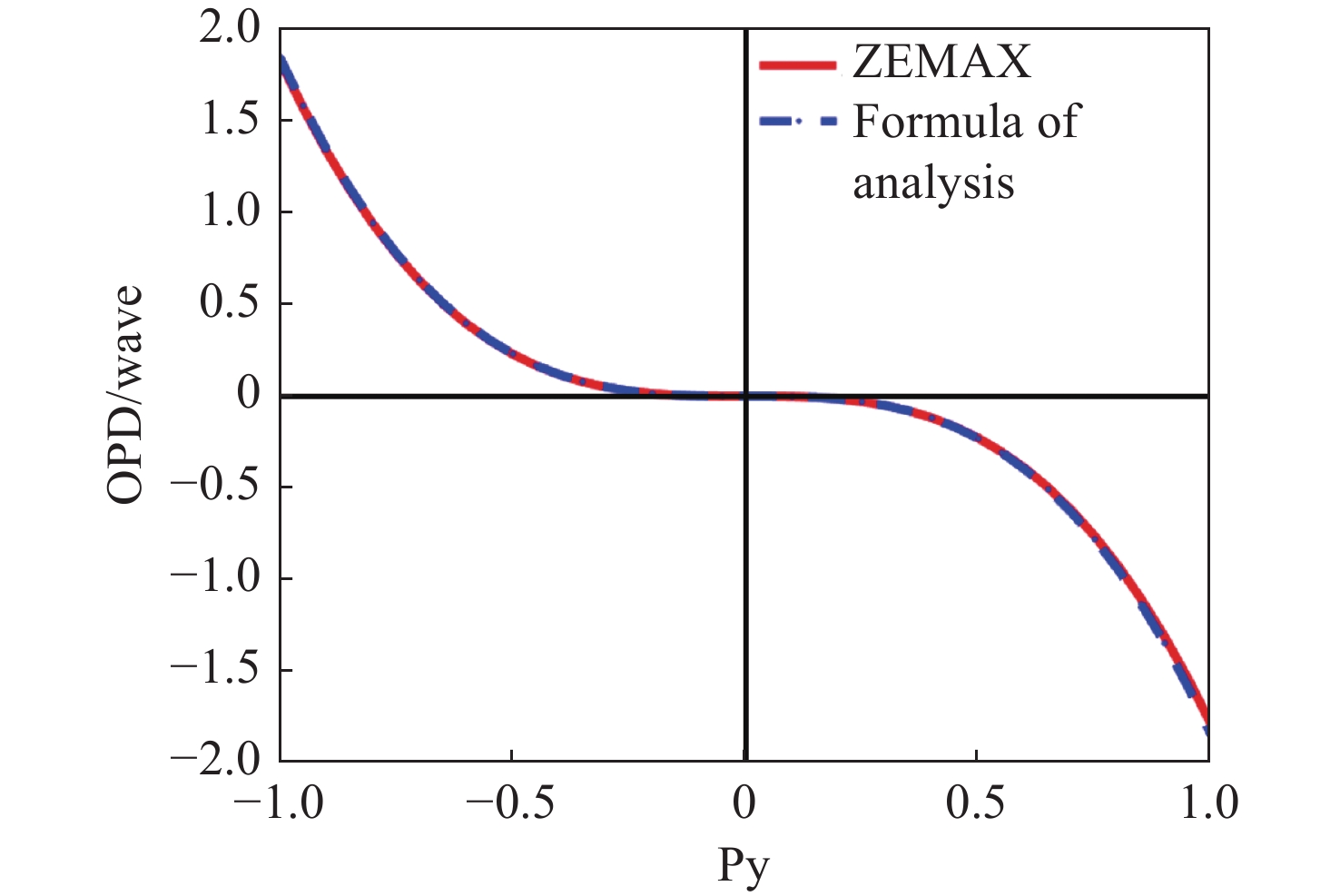
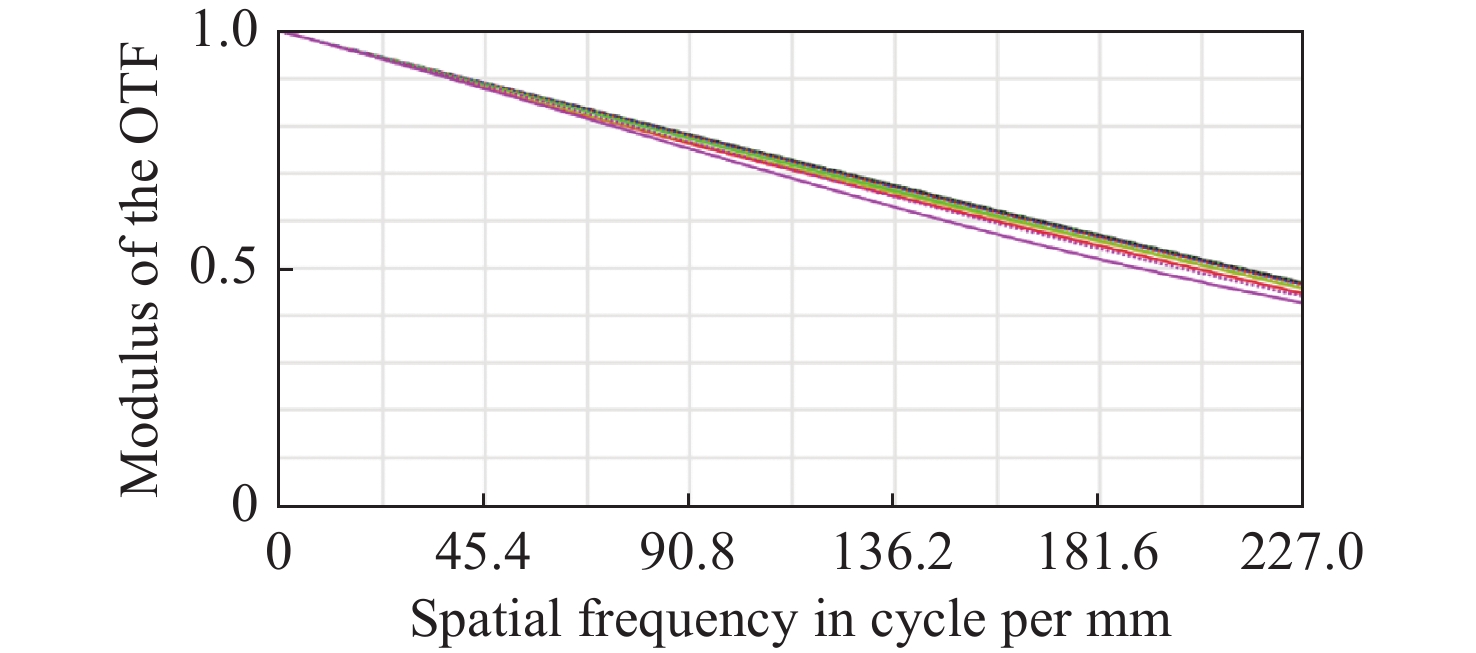
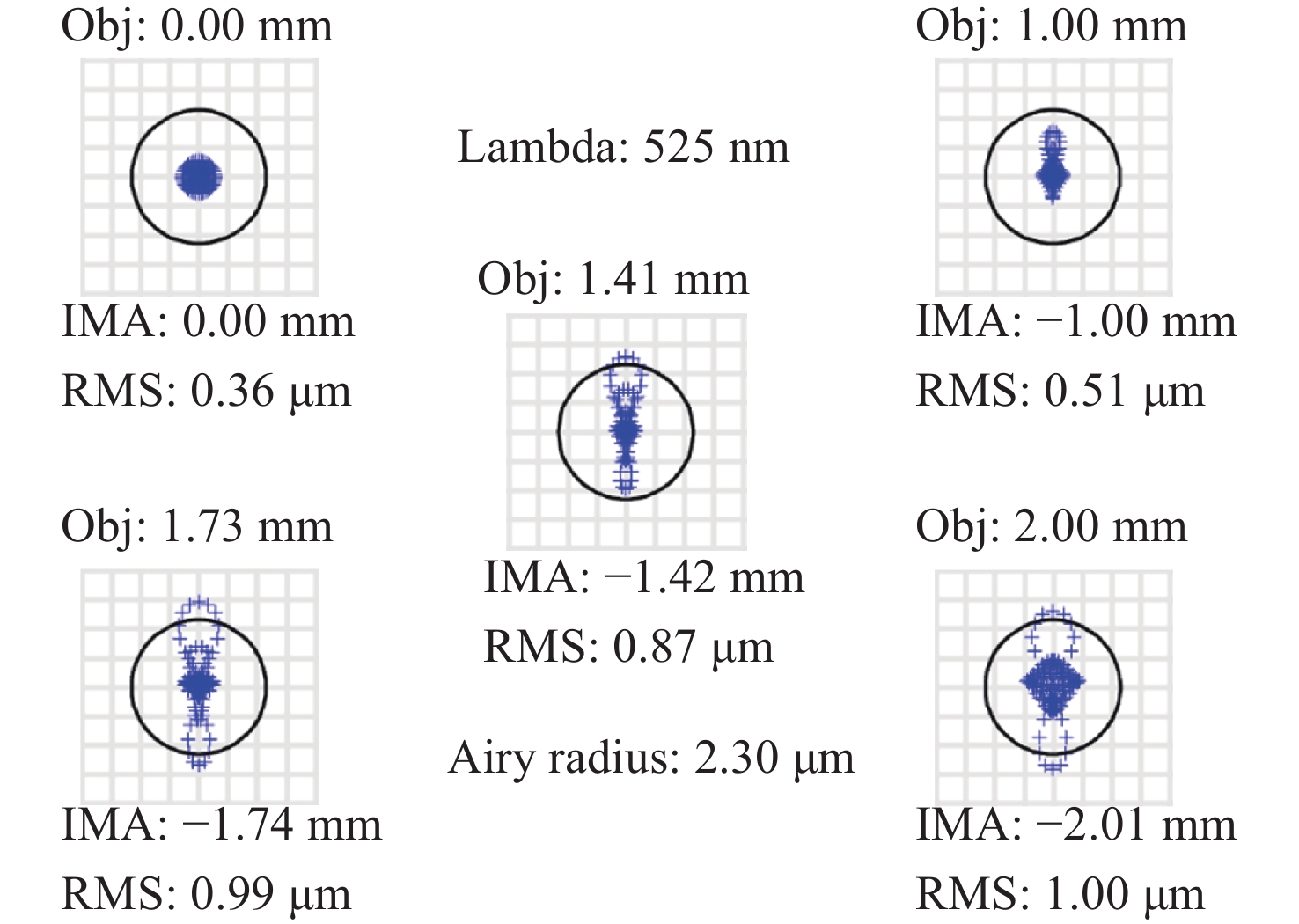
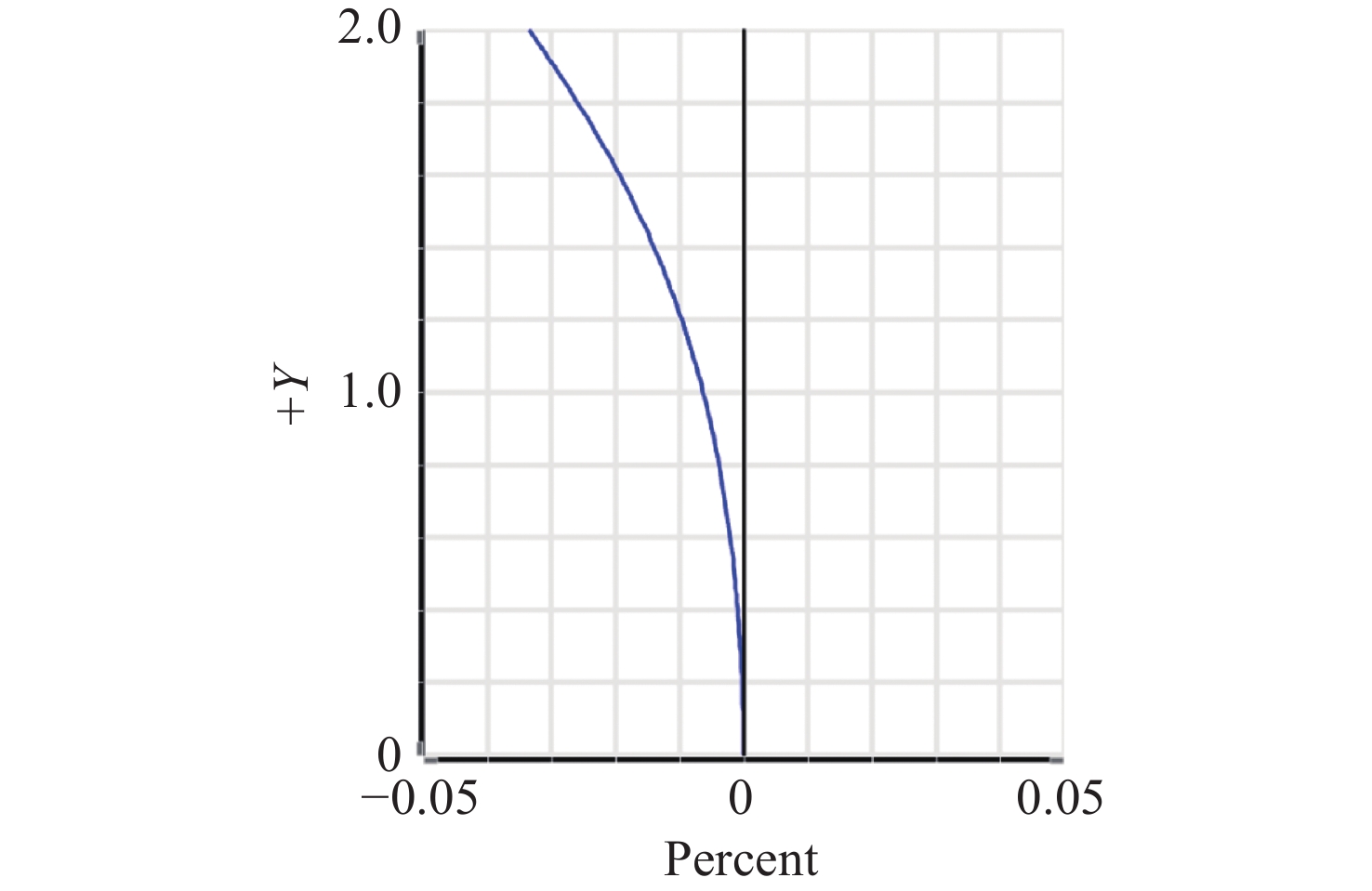
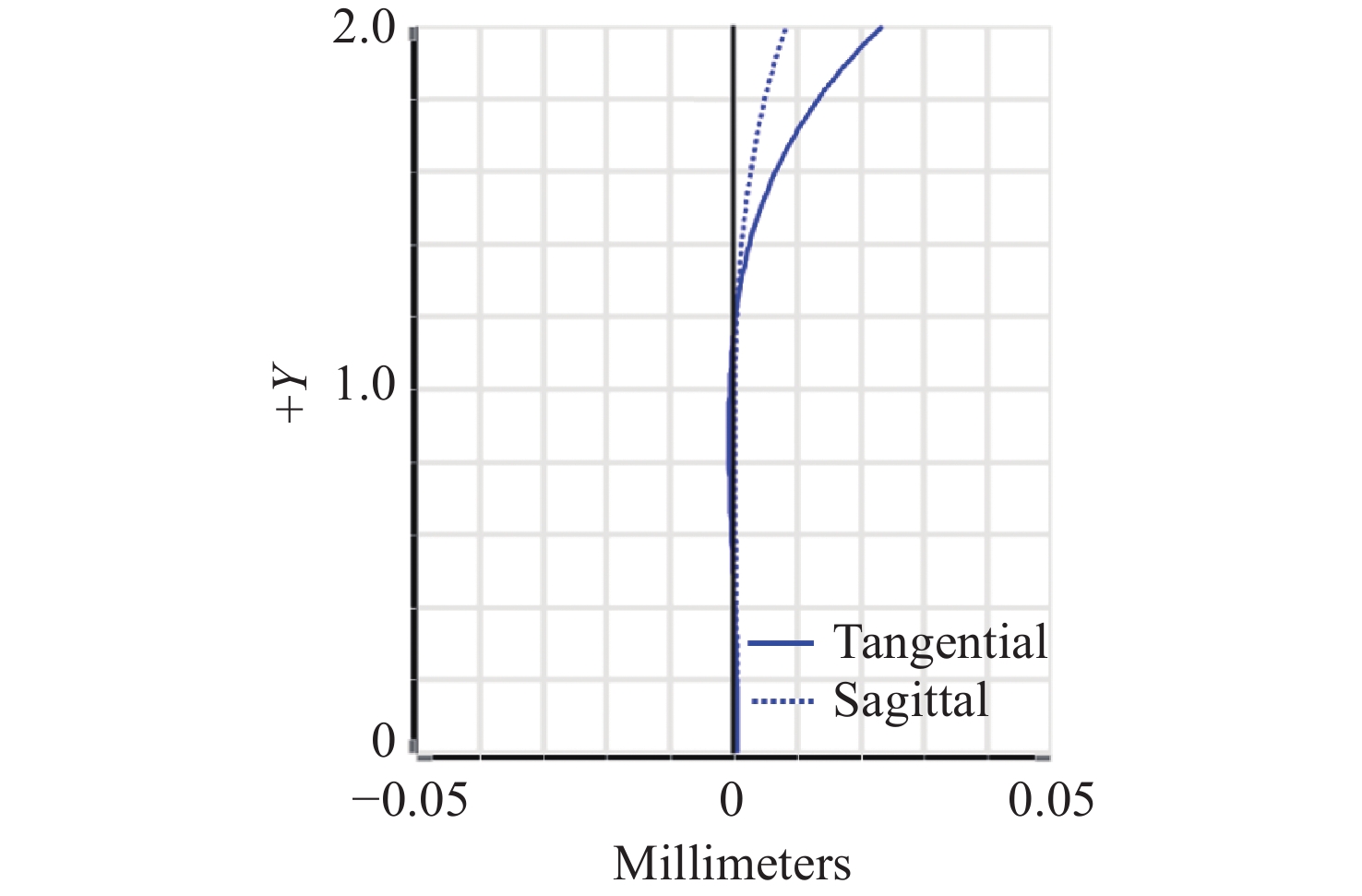
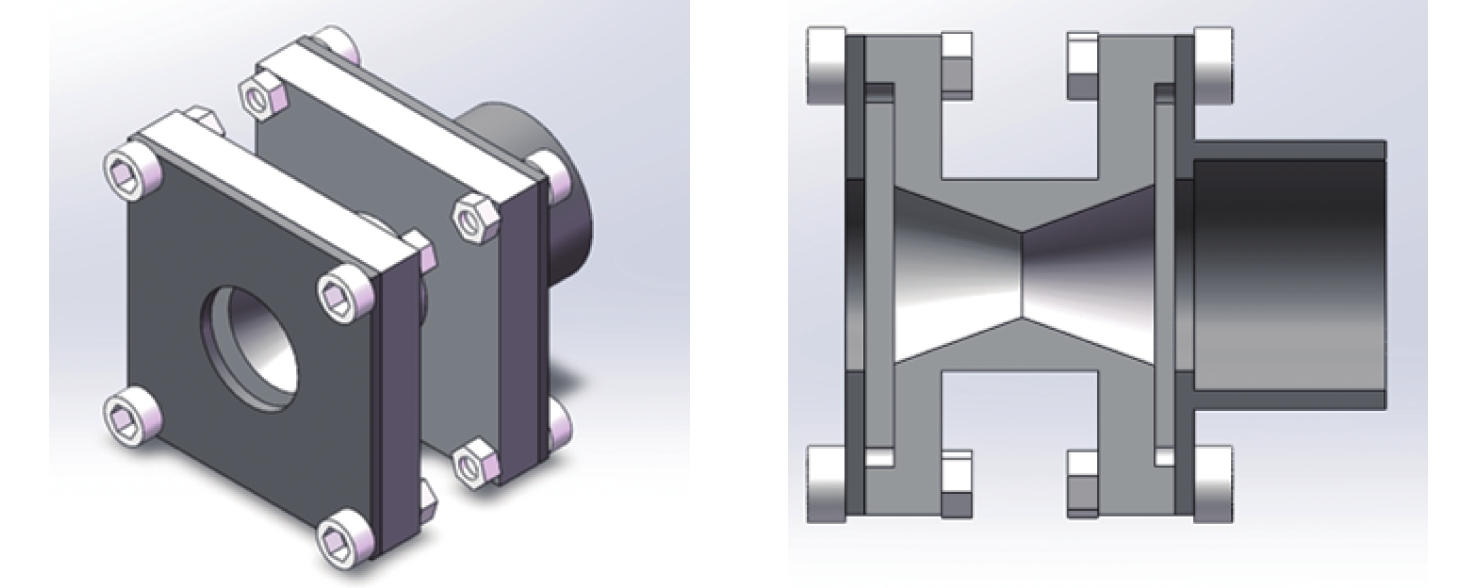
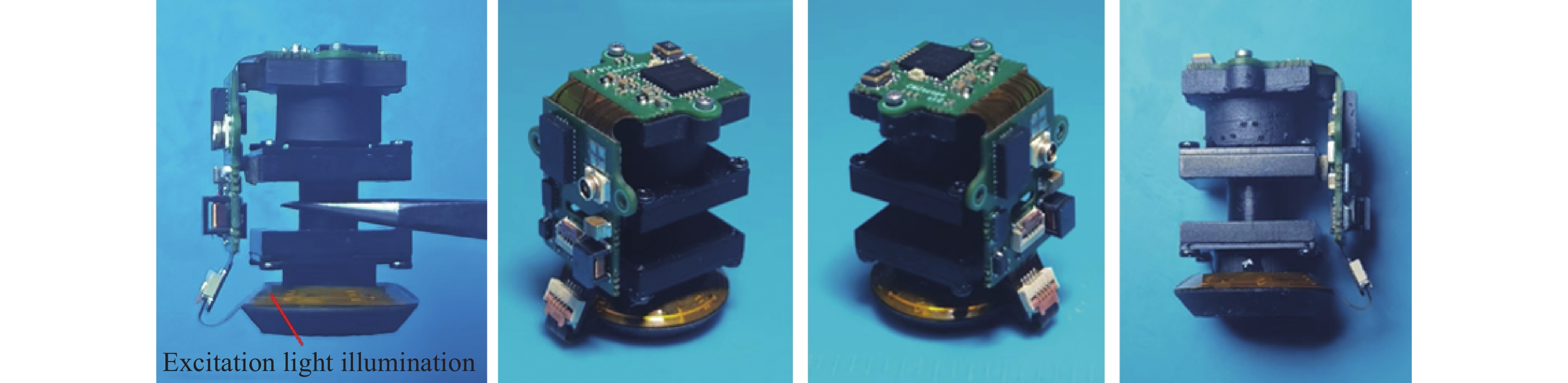
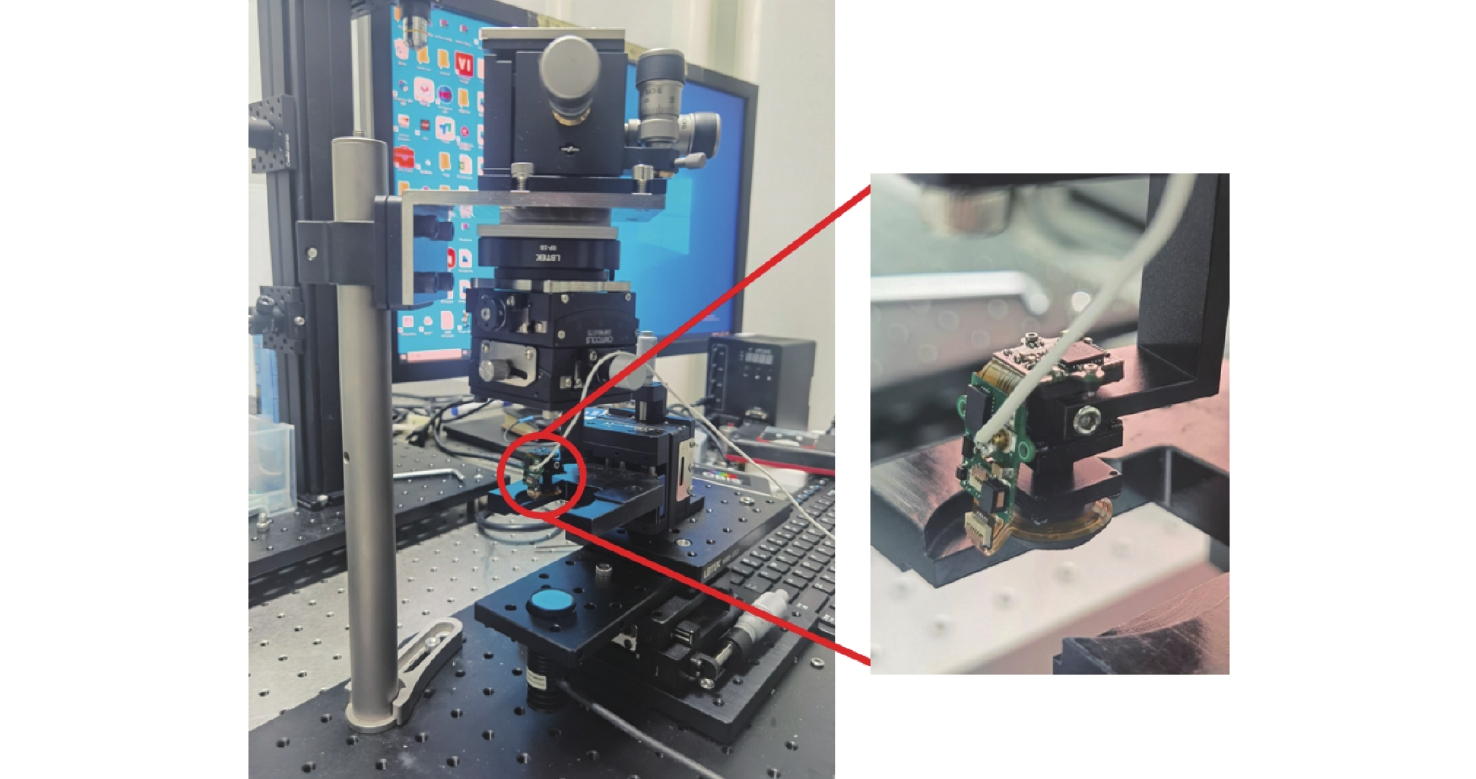
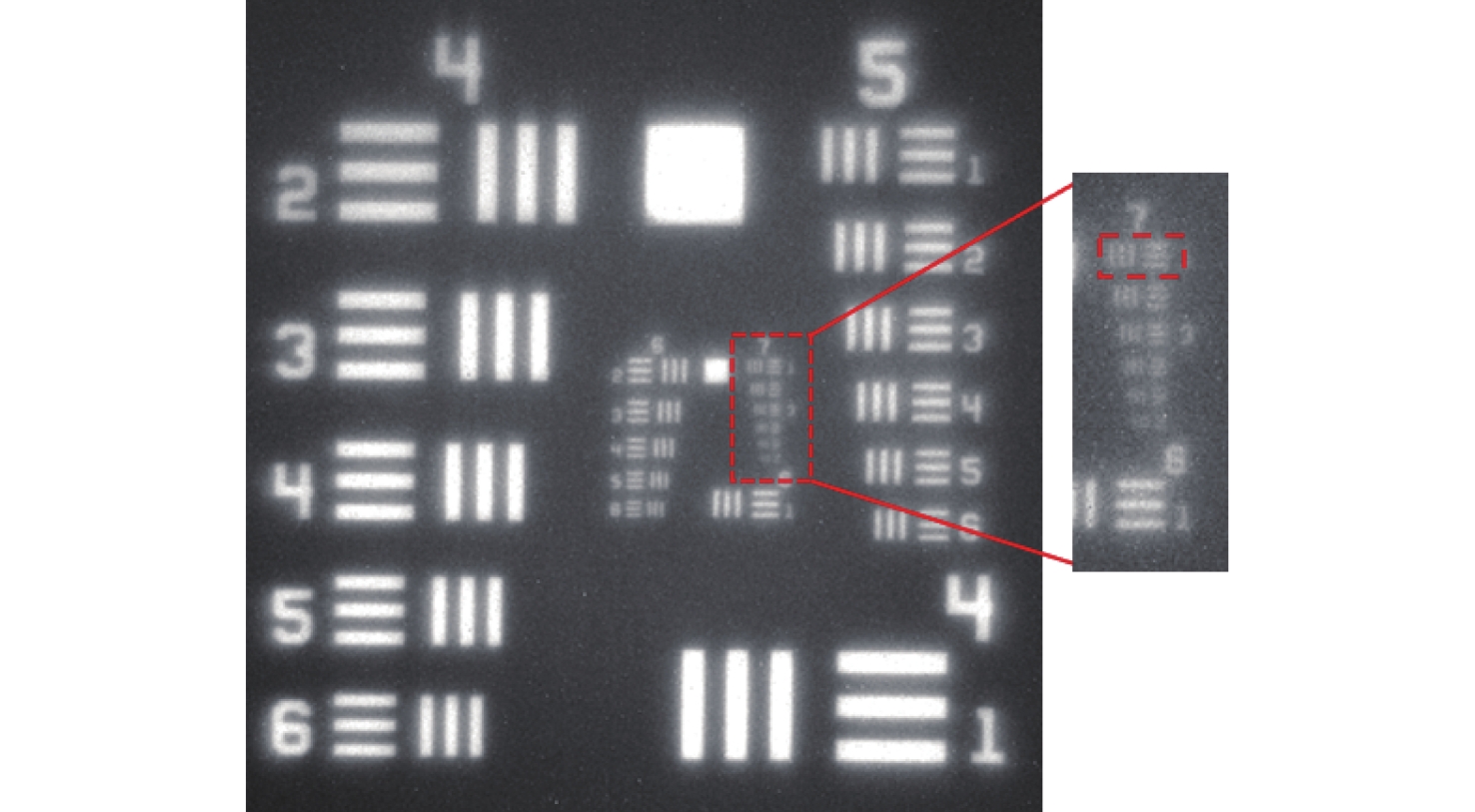
PDF 25553KB微型头戴式荧光显微镜可以对自由移动活体动物大脑中的神经活动进行实时成像,是近些年兴起的脑科学研究新仪器。然而,目前大多数微型荧光显微镜为了做到更小巧、更轻便,视场都比较小,这使得可用于观测的神经细胞数量受限,虽然有大视场系统的报道,但重量都比较大,对动物的自由行为会产生一定的影响。为了提高微型荧光显微镜成像性能,同时降低其重量,光学系统采用超轻、超薄、成像质量高的超构透镜。本文首先推导了双曲相位超构透镜的像差公式,并以此为指导,完成了一款视场为4 mm×4 mm、NA为0.14的微型荧光显微镜设计,实现了7种初级像差的校正。装配完成的样机重量仅为4.11 g,全视场范围内分辨率为7.8 μm,对自由移动小鼠大脑中的神经活动进行成像观测能够达到单细胞分辨率。


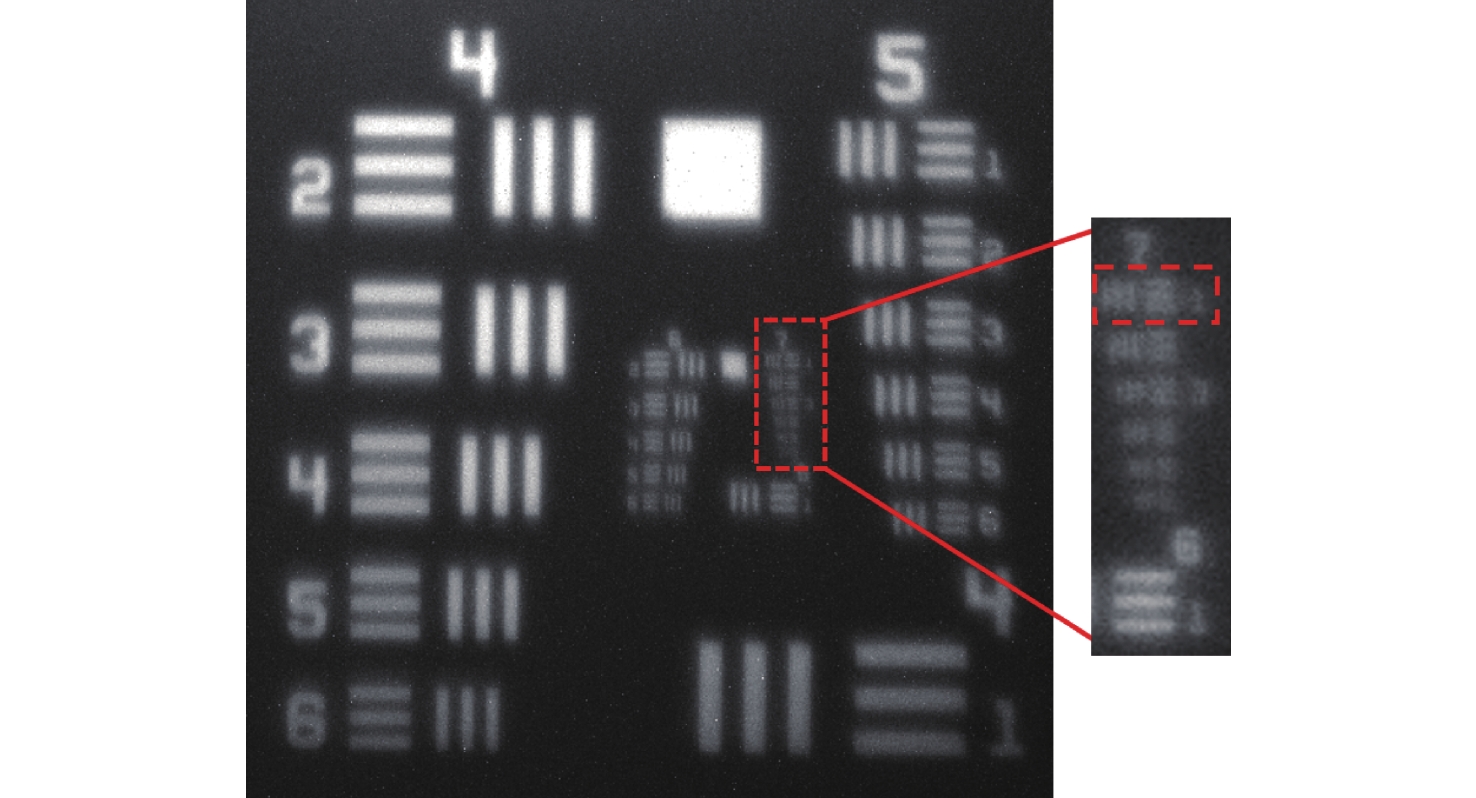
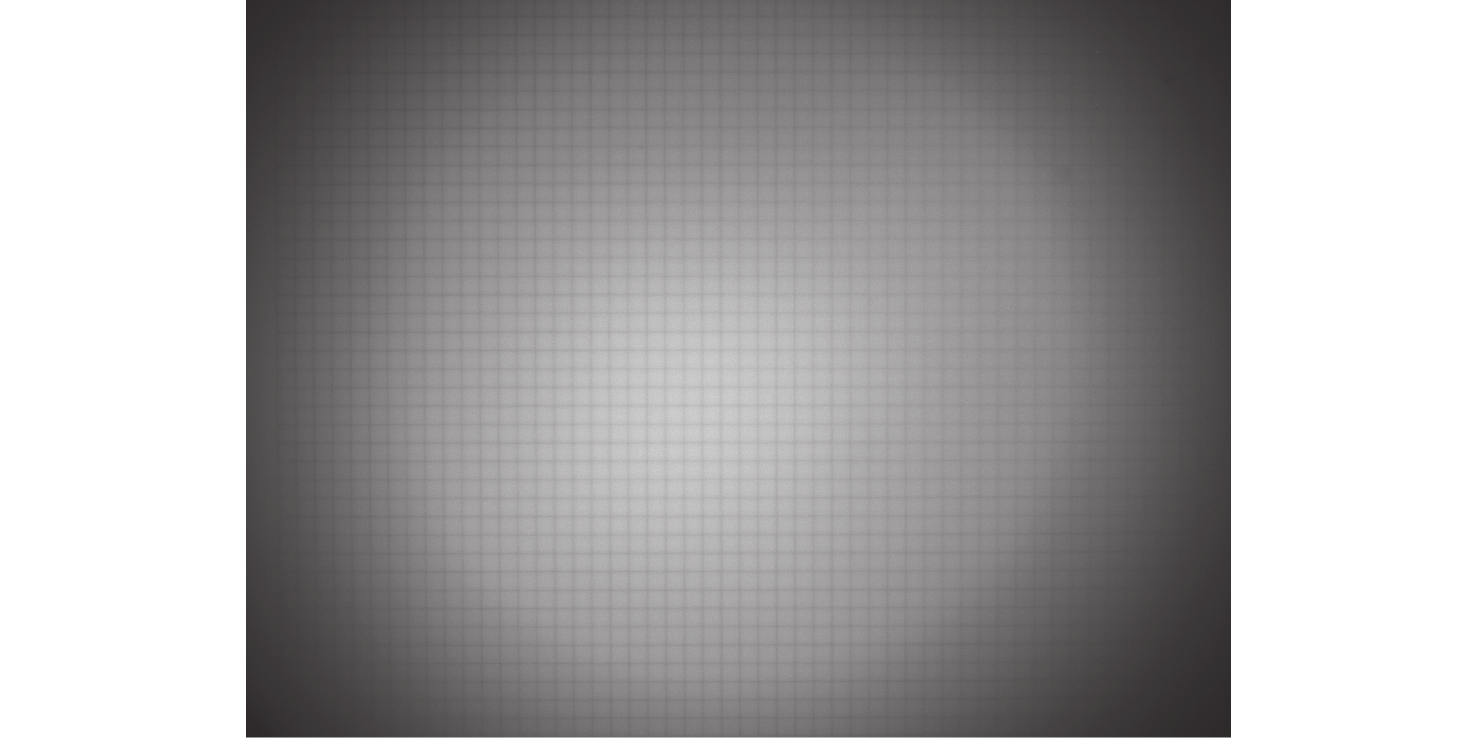
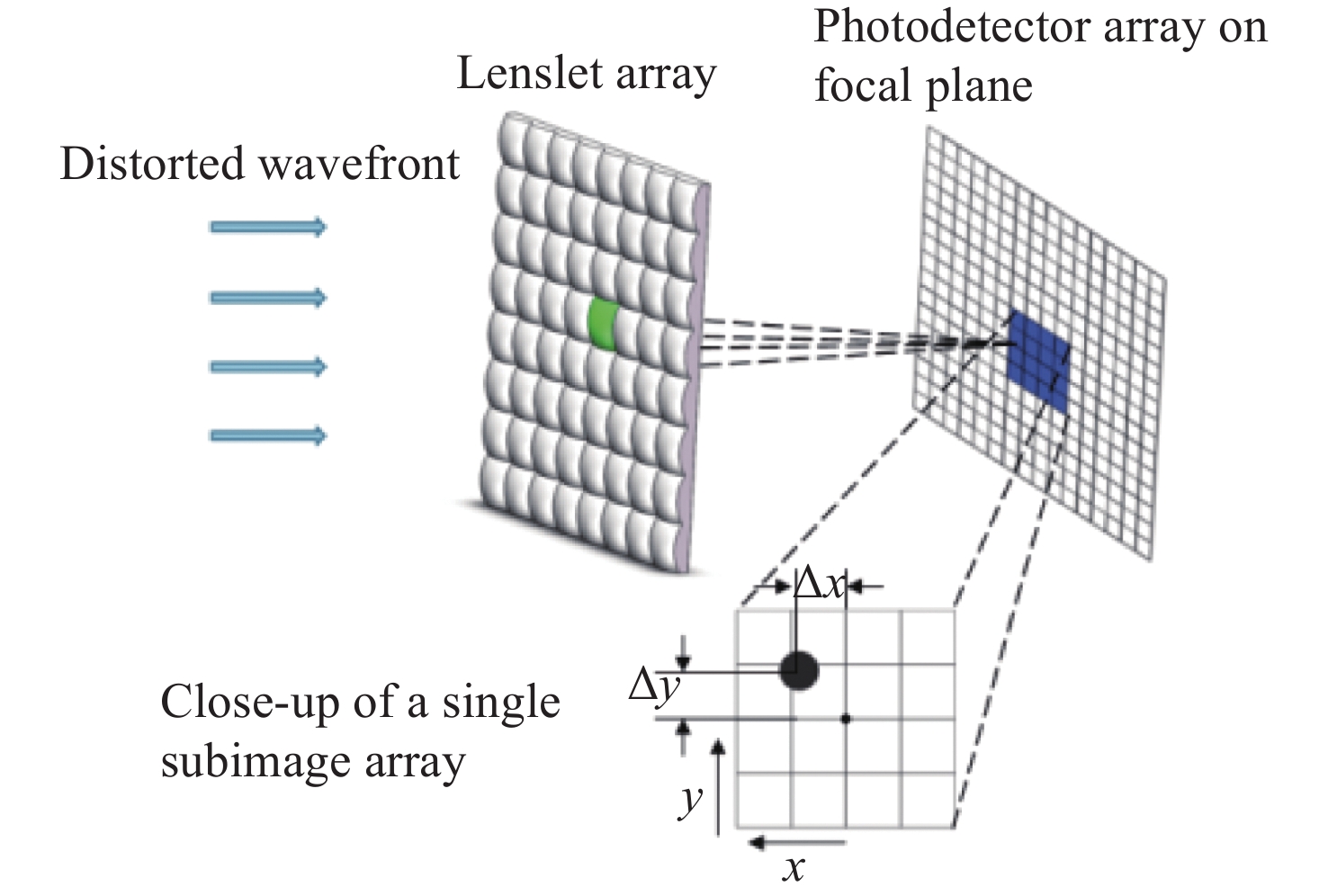
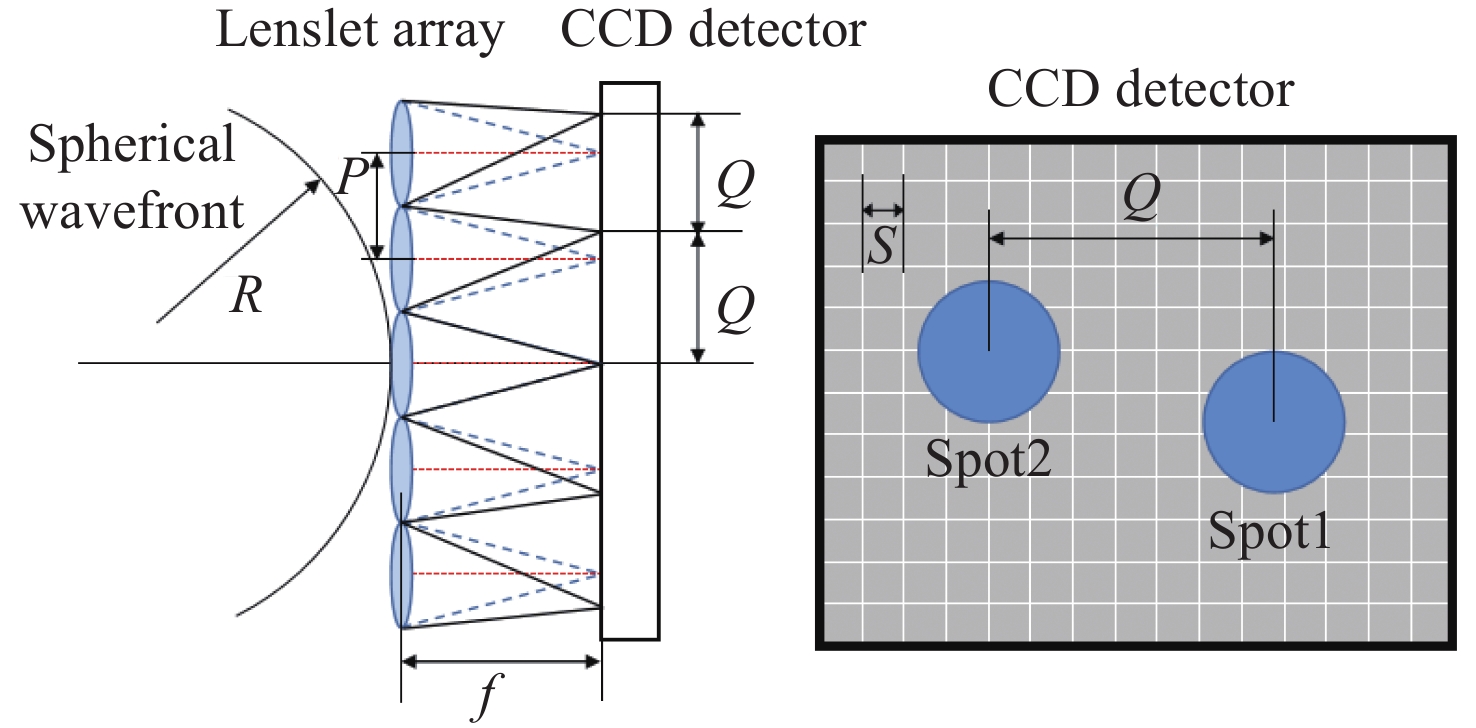
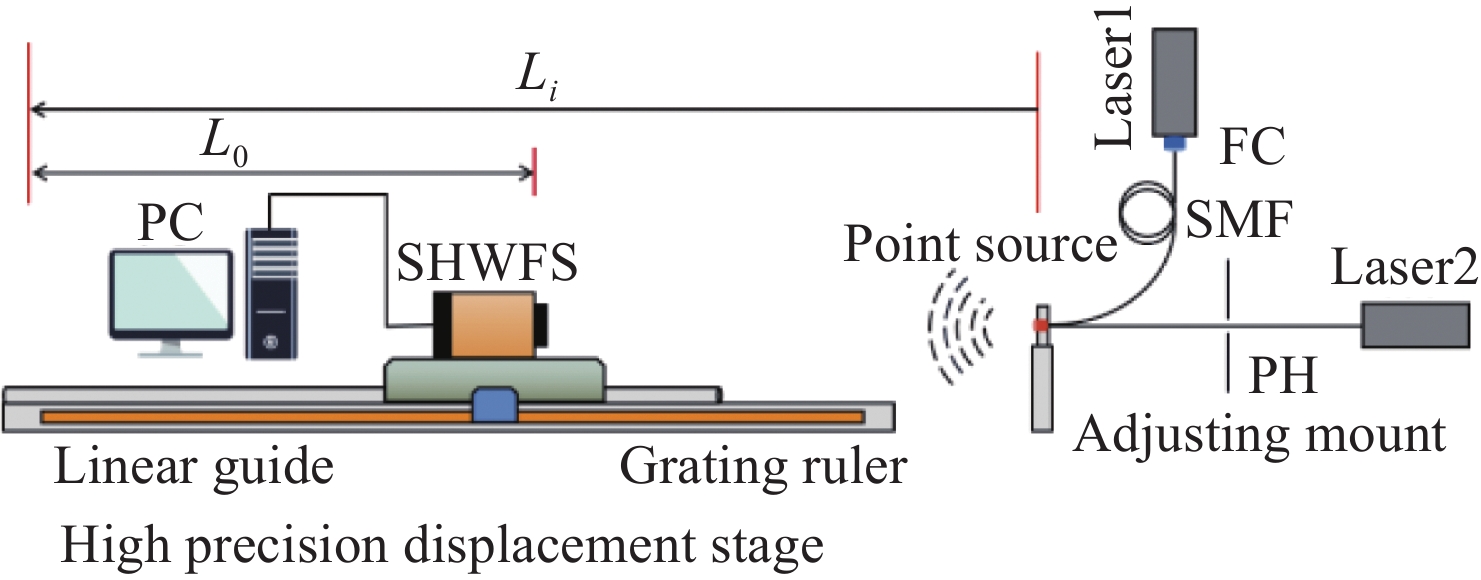
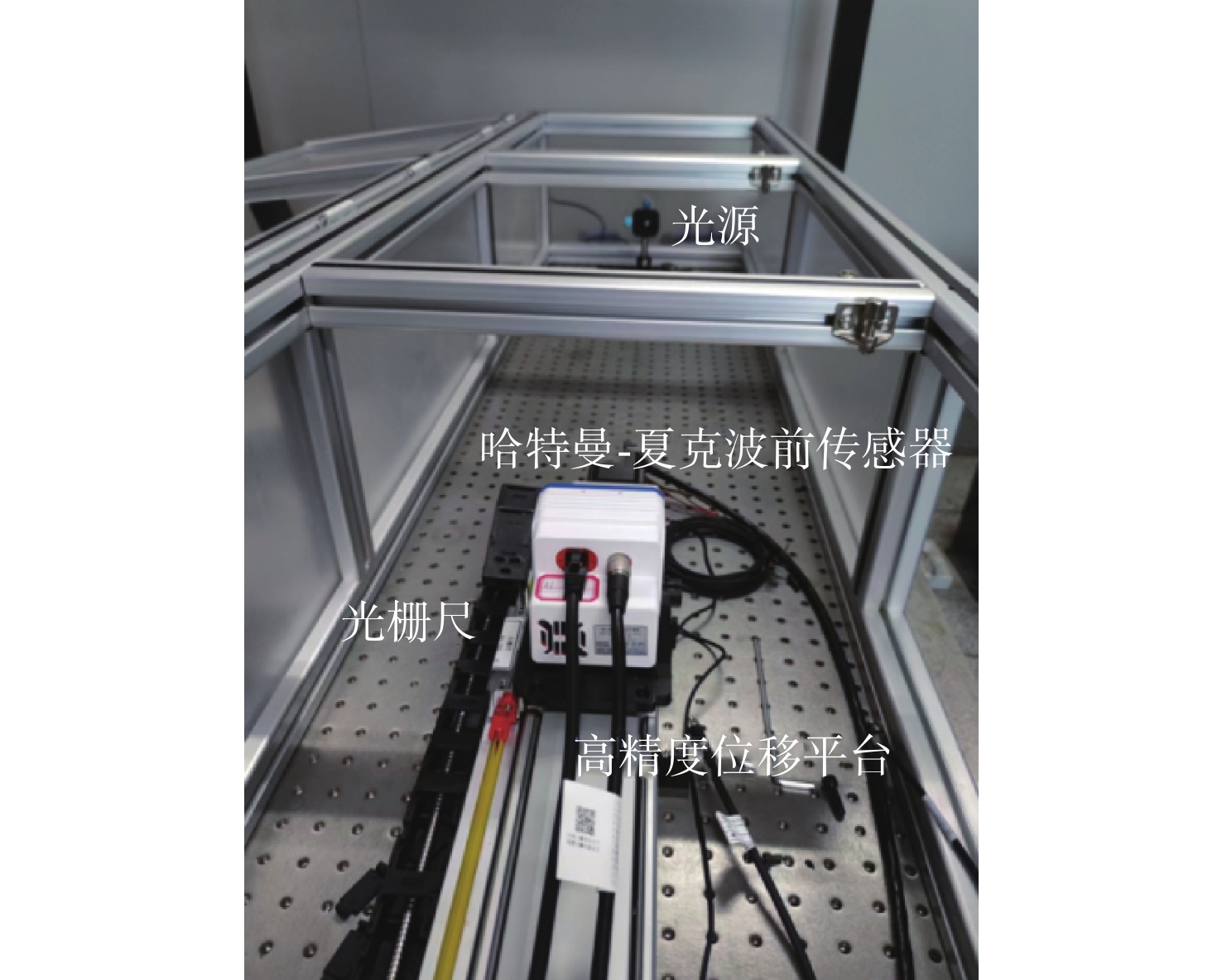
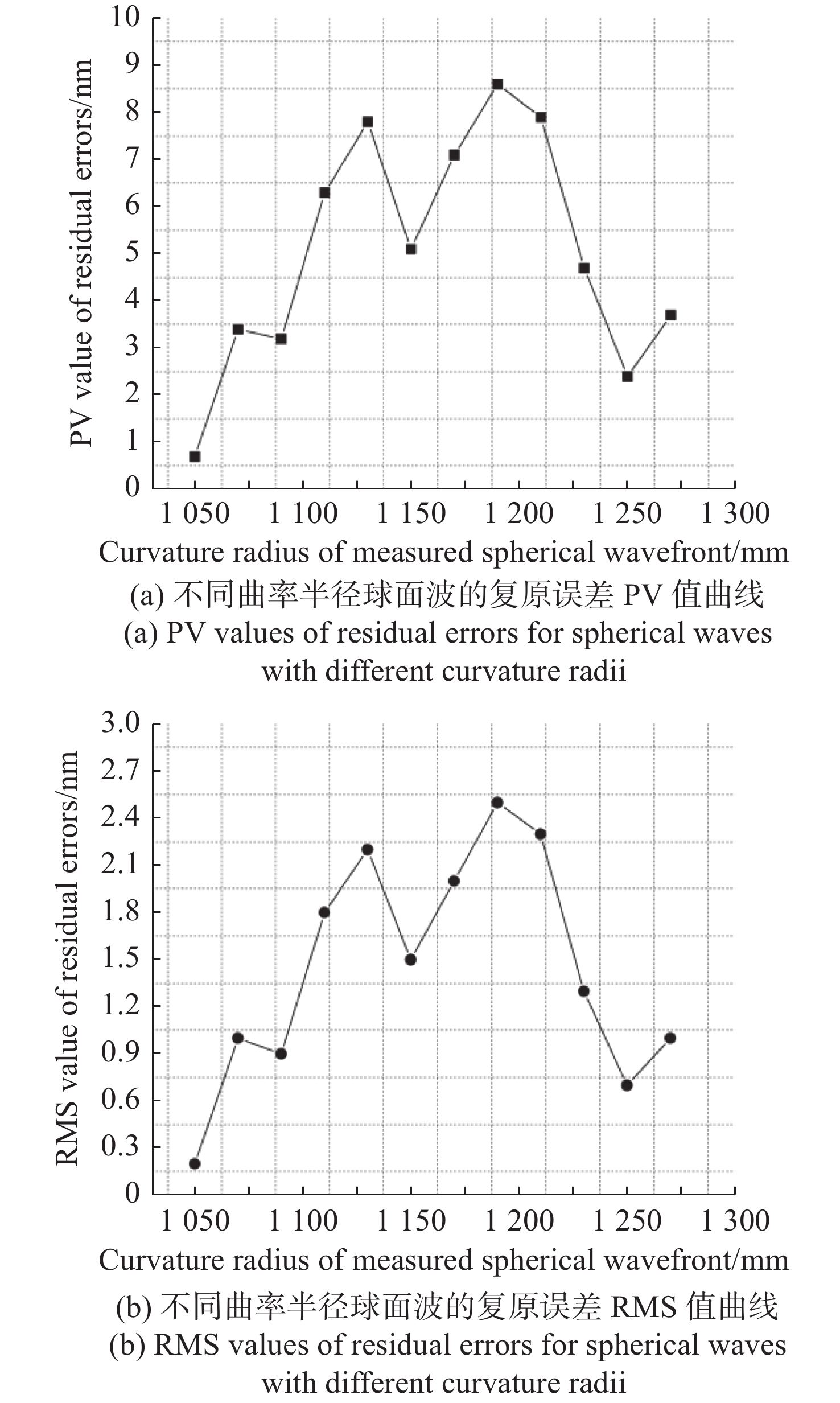
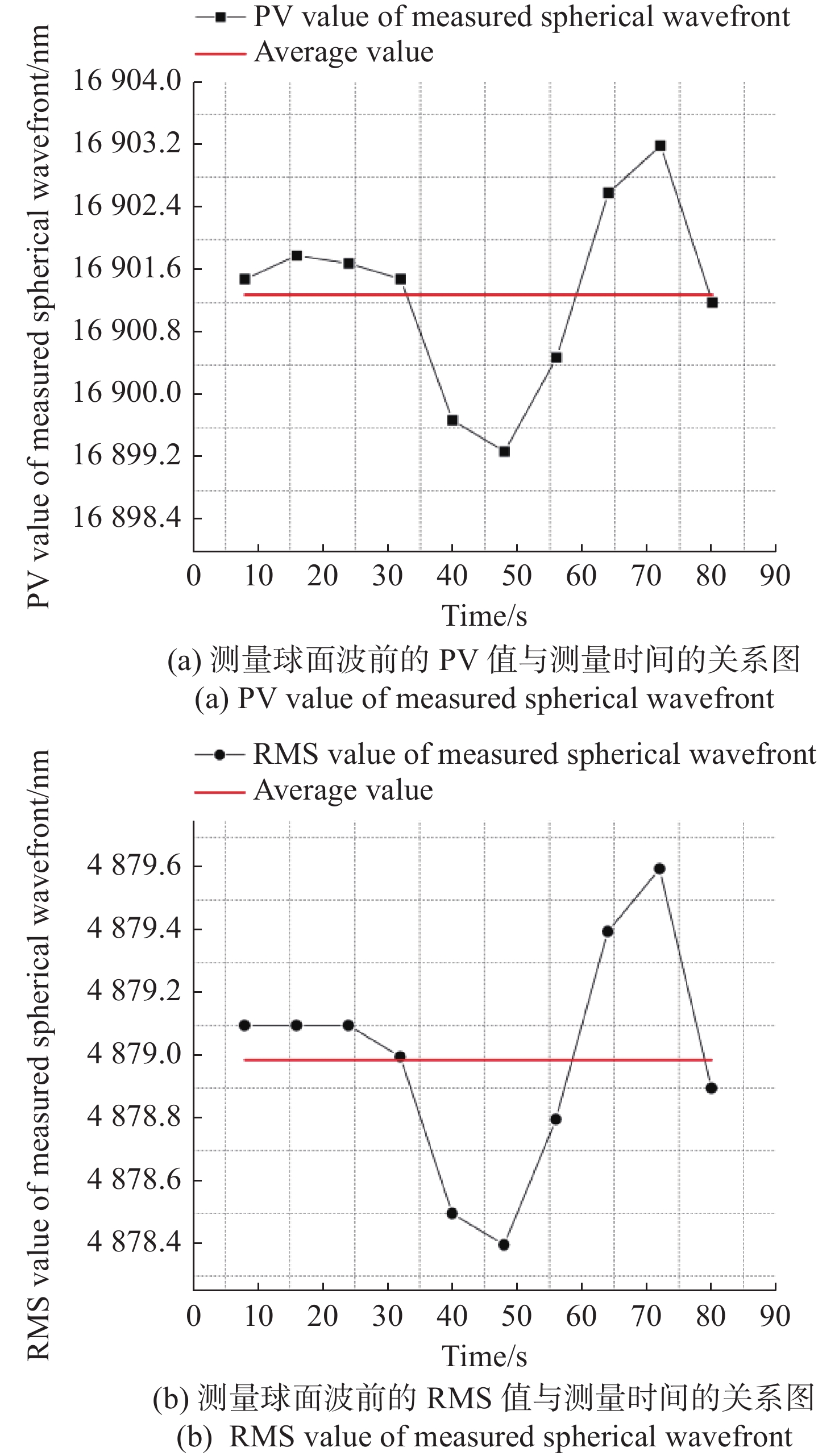
为解决哈特曼-夏克波前传感器传统标定方法存在的测量精度低、稳定性不足等问题,提出了一种基于球面波的哈特曼-夏克波前传感器高精度绝对标定方法。通过理论推导获取了球面波的高精度标定方法,结合搭建的球面波标定实验装置,对子孔径数为128×128的哈特曼-夏克波前传感器完成高精度标定。该方法计算得到了哈特曼-夏克波前传感器结构参数
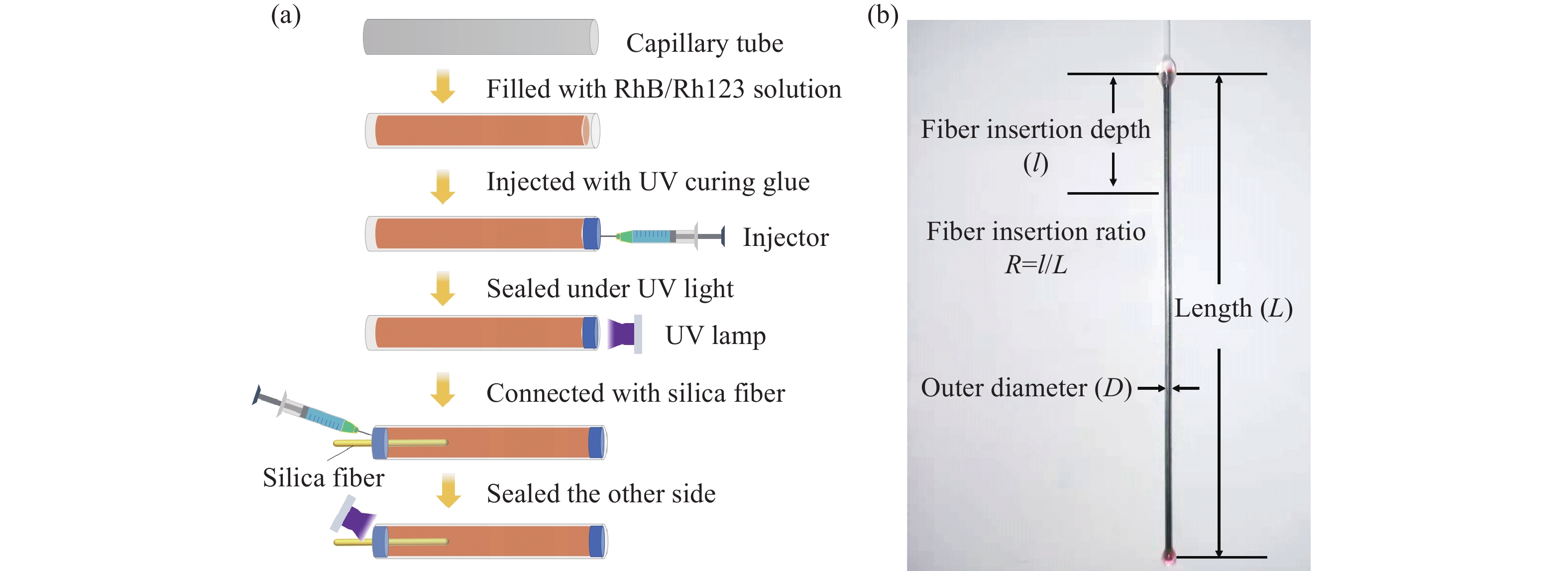
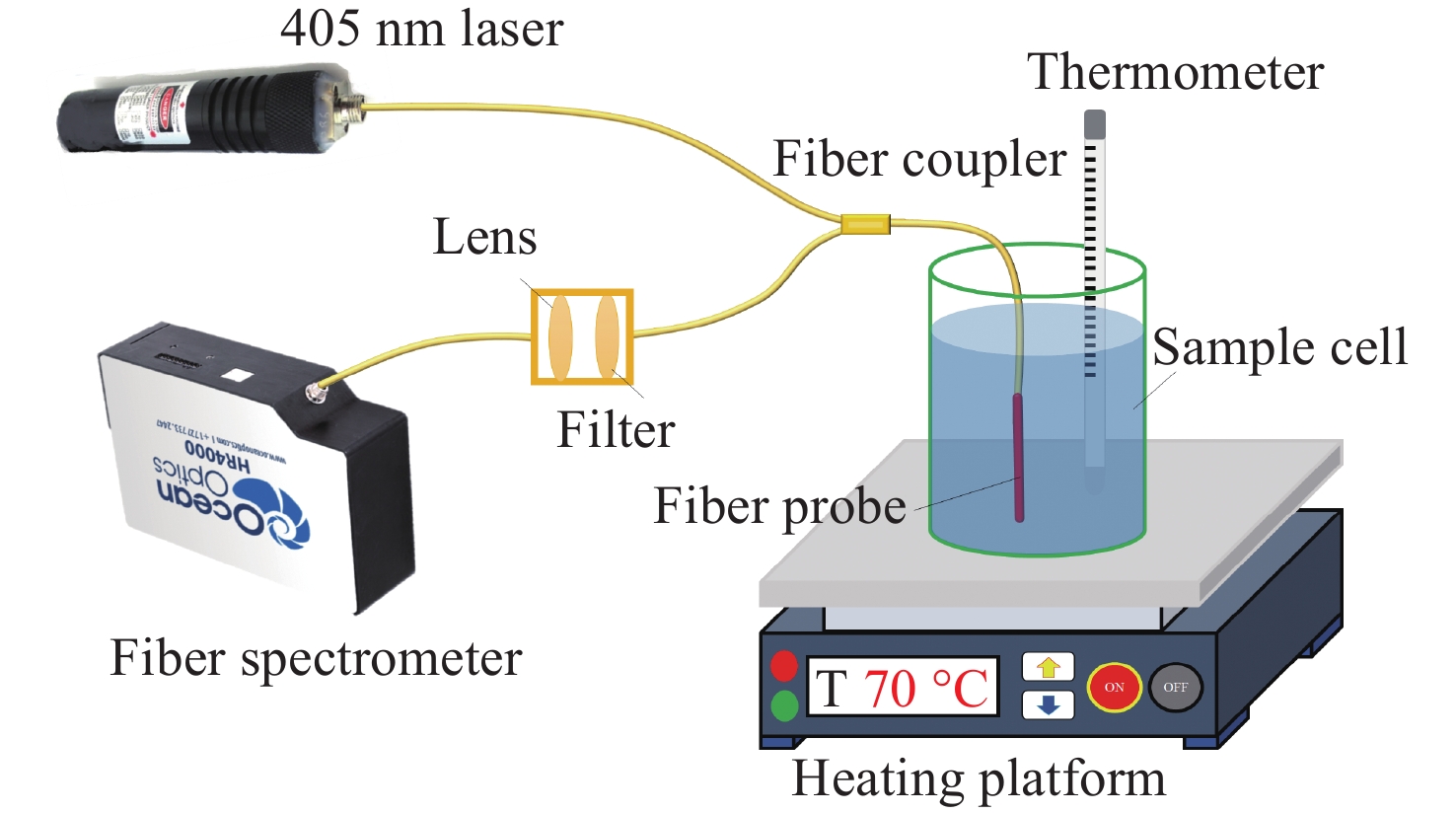
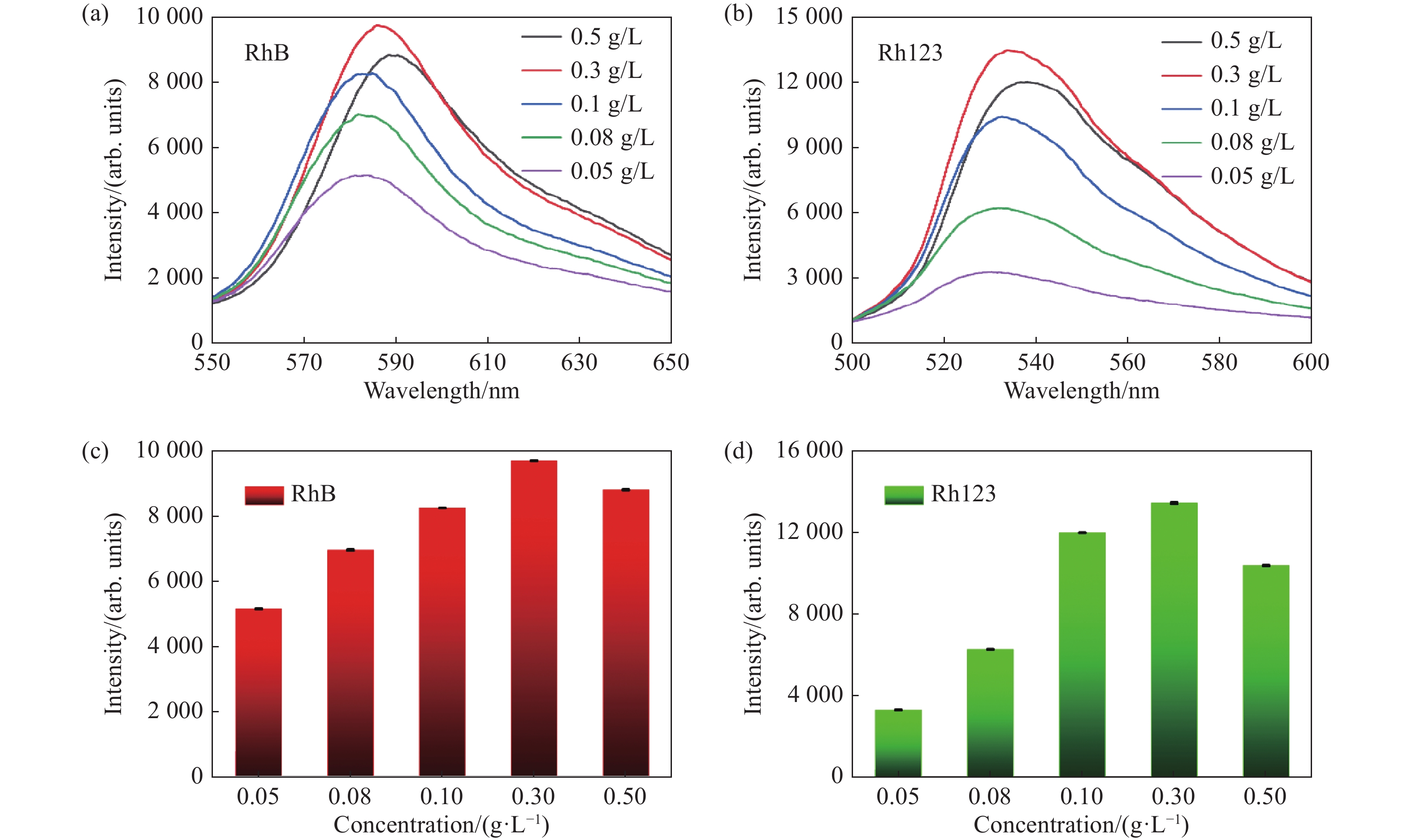
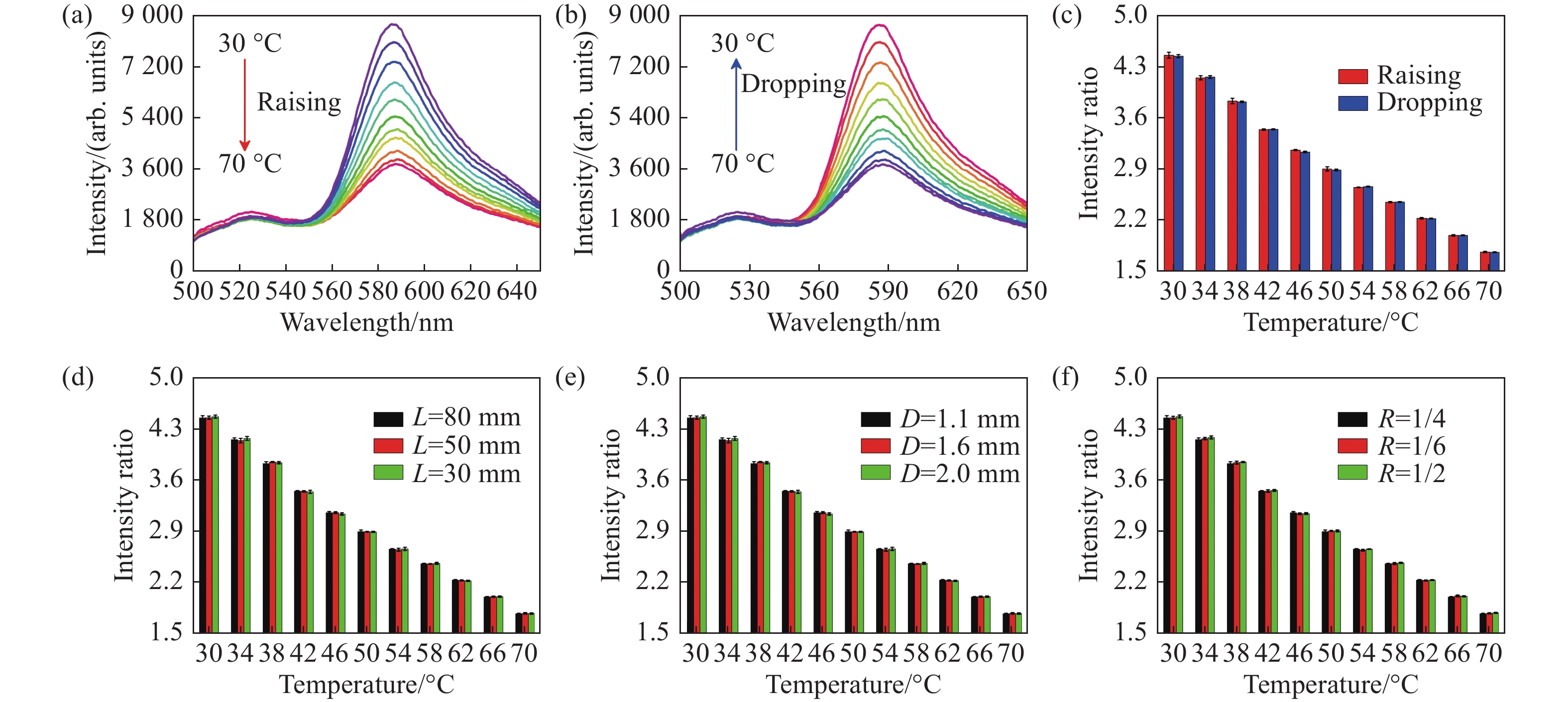
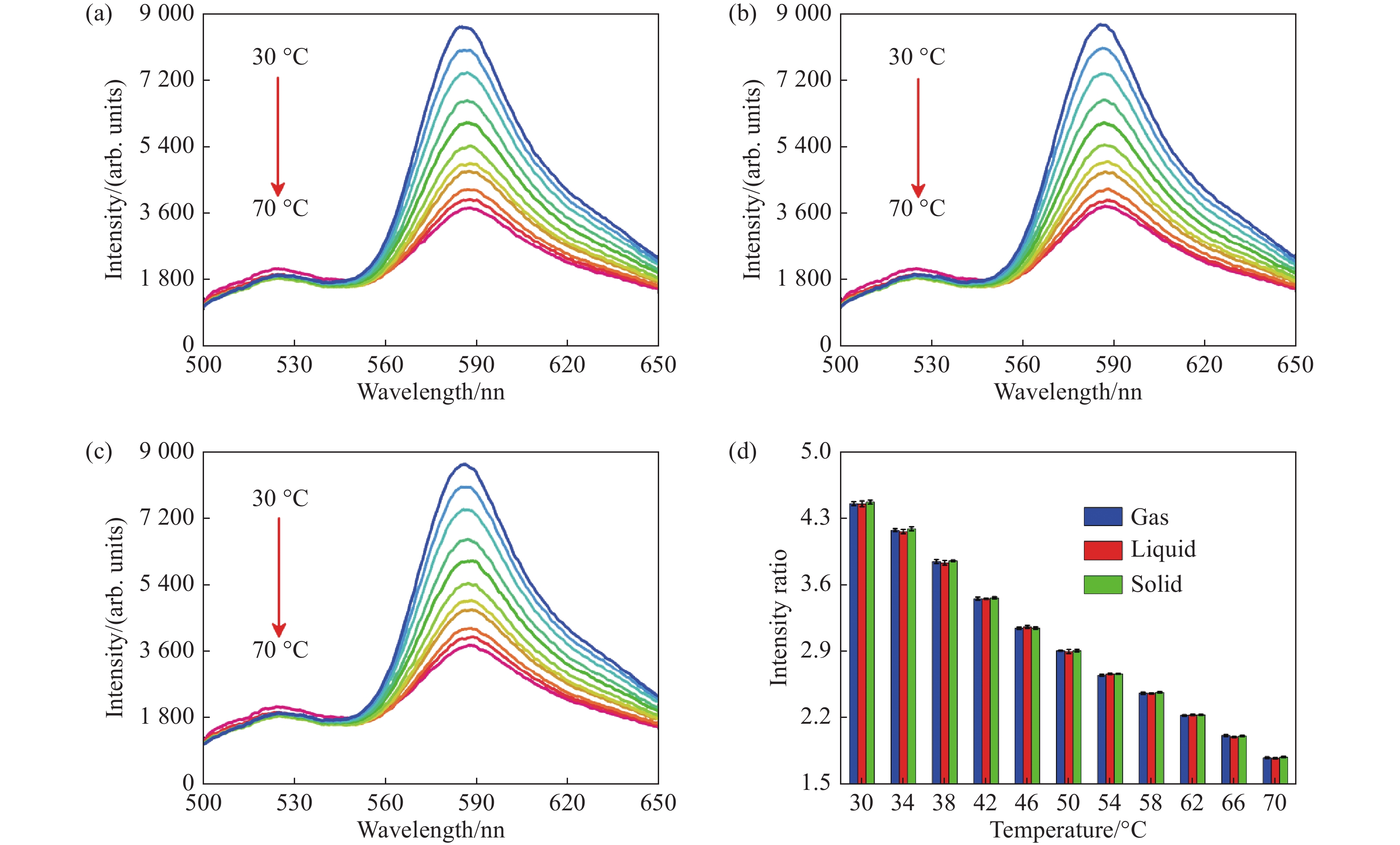
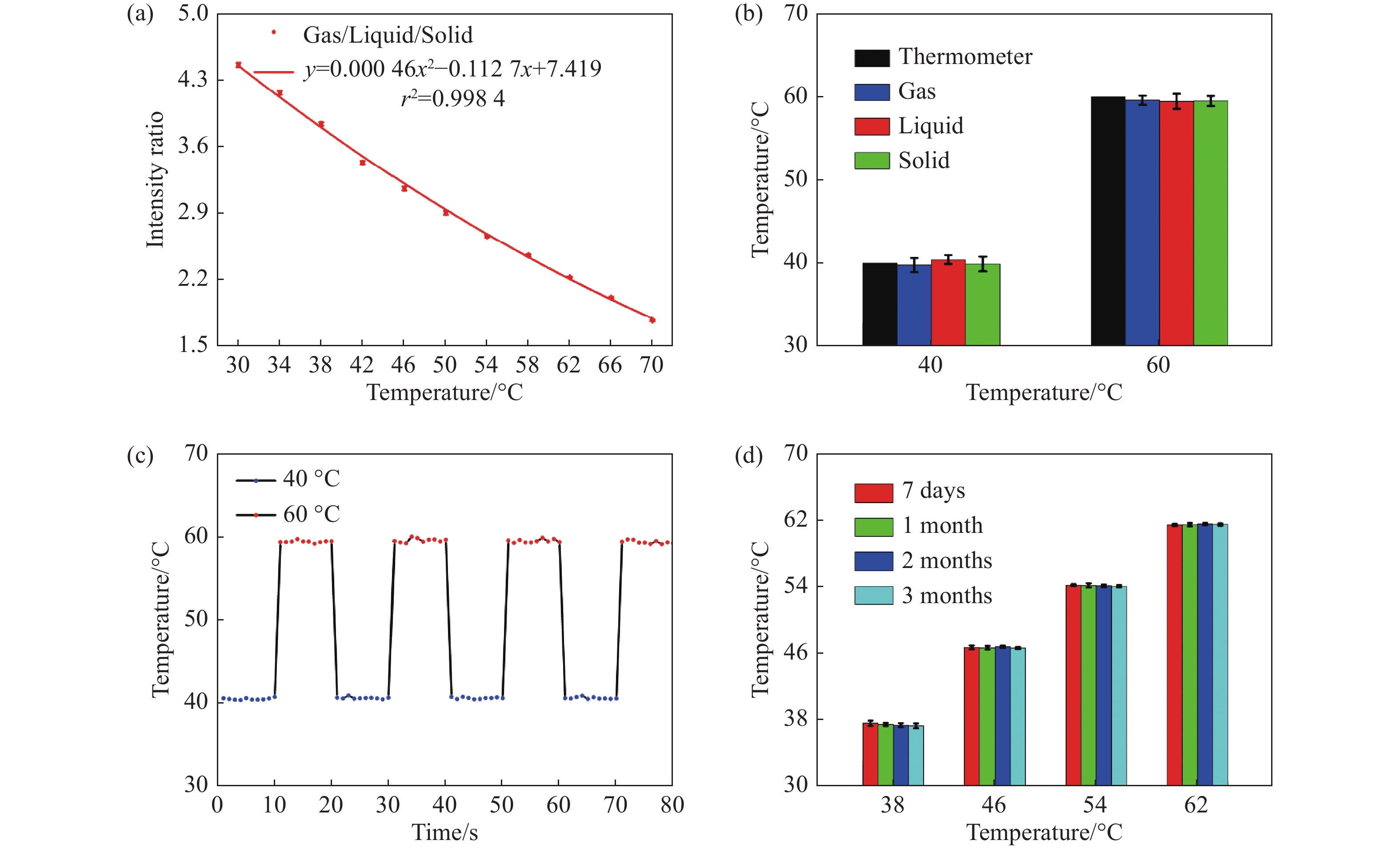
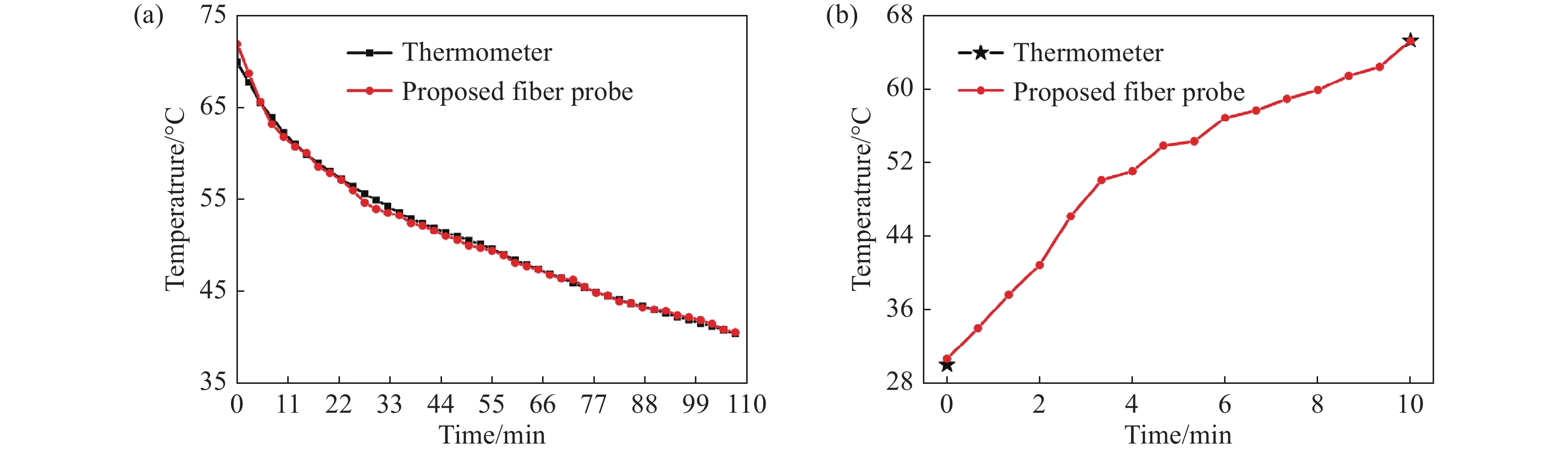
针对现有光纤荧光温度传感探头制备复杂的问题,本文提出了一种制备简单、成本低廉且性能优异的基于毛细管液芯的光纤荧光温度传感器。首先将对温度敏感的罗丹明B和对温度不敏感的罗丹明123的混合溶液作为温敏材料封装在不锈钢毛细管中制备成传感探头,利用两者荧光发射峰强度的比值进行温度传感。之后对传感探头中混合溶液的浓度和毛细管的结构参数进行了优化,并对传感器的性能进行了测试,最终将其应用于实际生活温度检测中。实验结果表明:该传感器的温度响应范围为30~70 °C,荧光强度比与温度之间呈二次相关,拟合相关系数高达0.9984,且具有很好的准确性、重复性和稳定性,使用时间可达3个月以上,能很好地应用于对日常生活中温度的检测。该光纤荧光温度传感器在实时监测和远端探测方面具有很大的潜力。
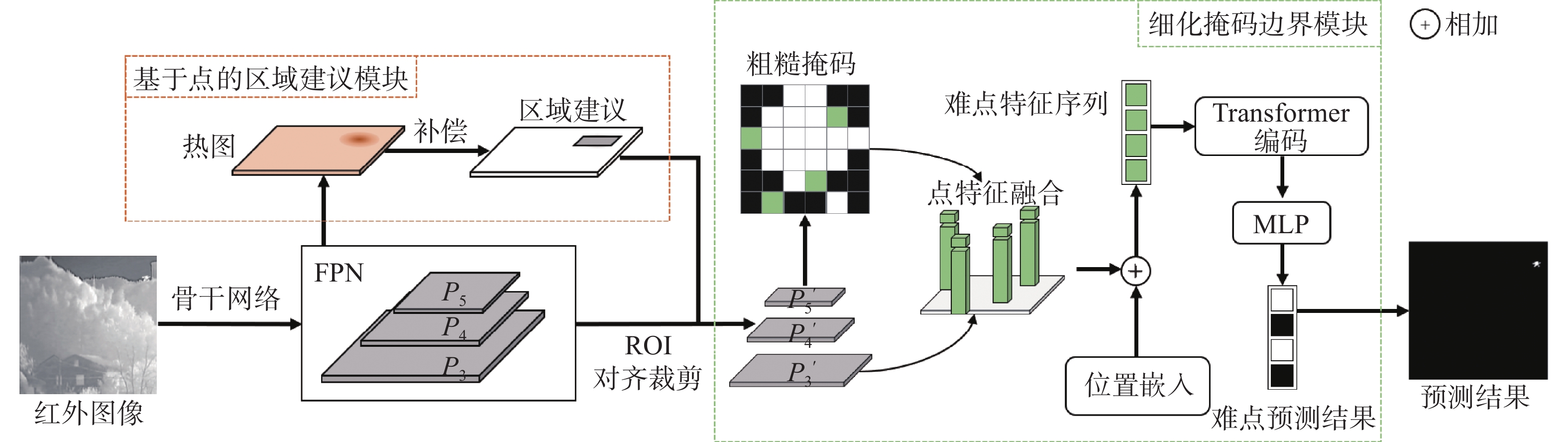
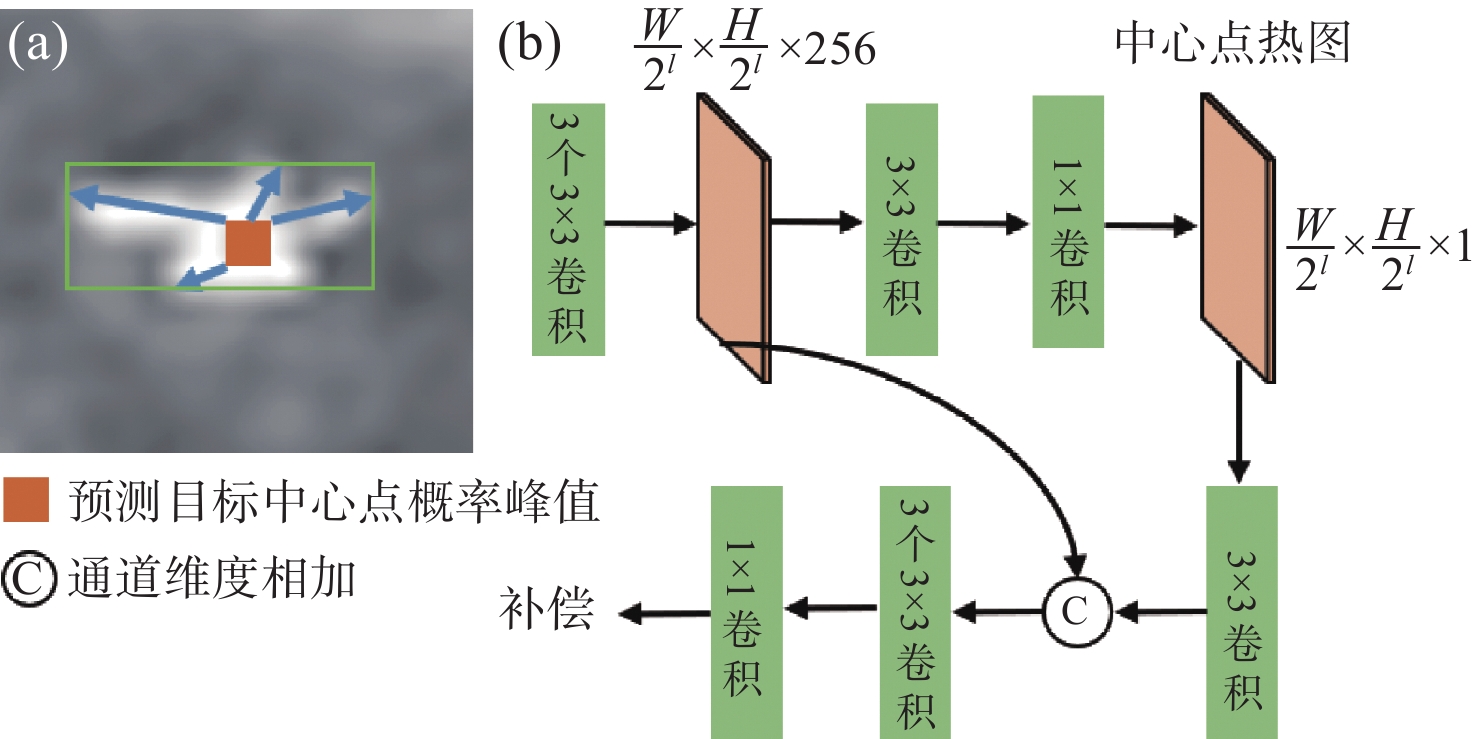
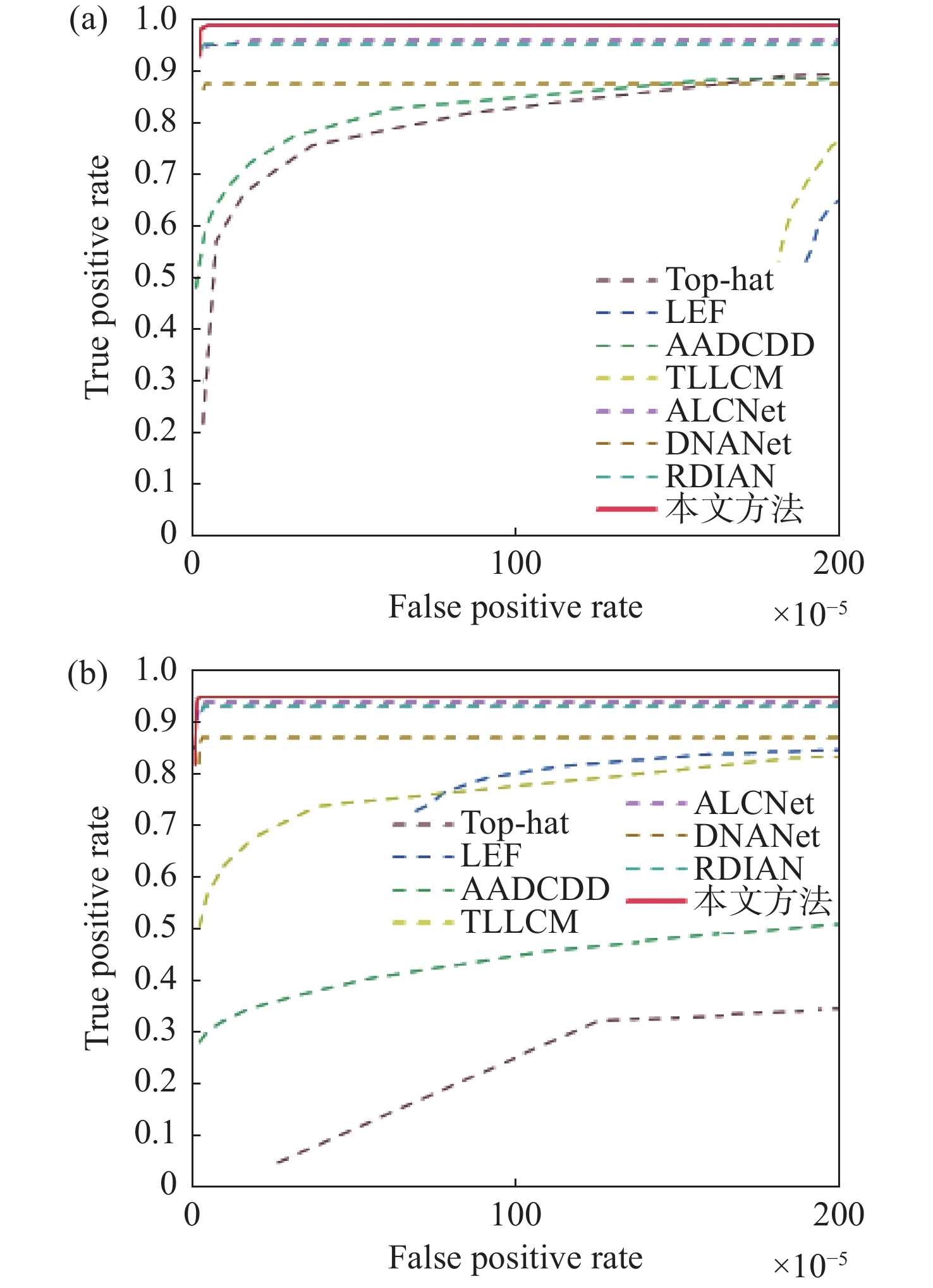
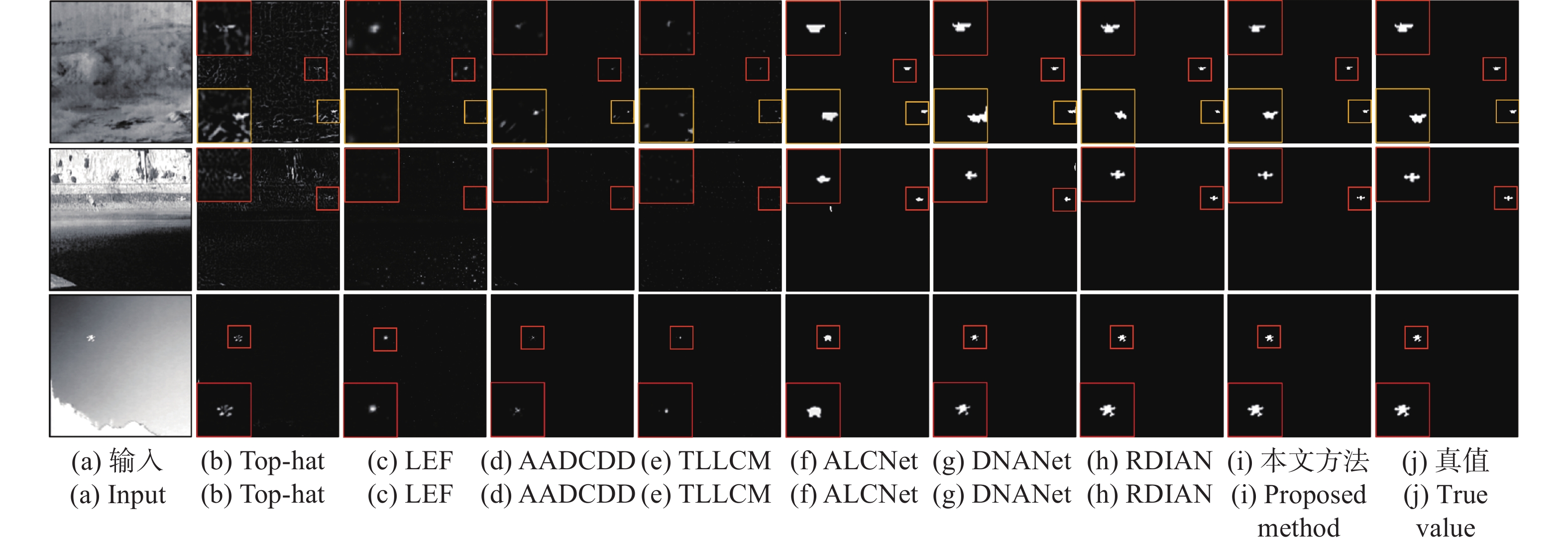
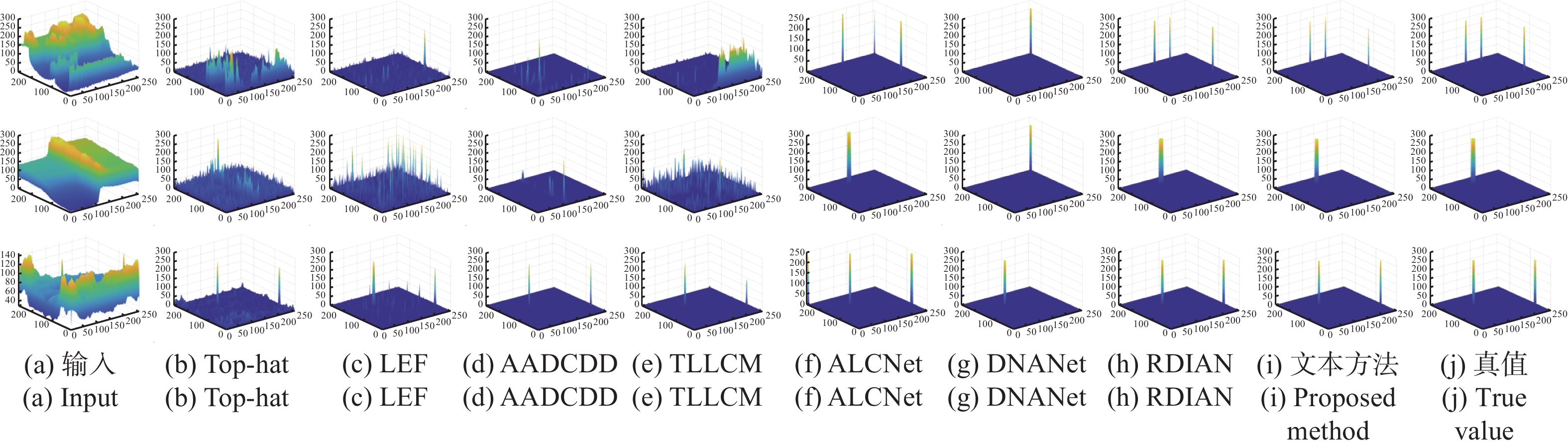
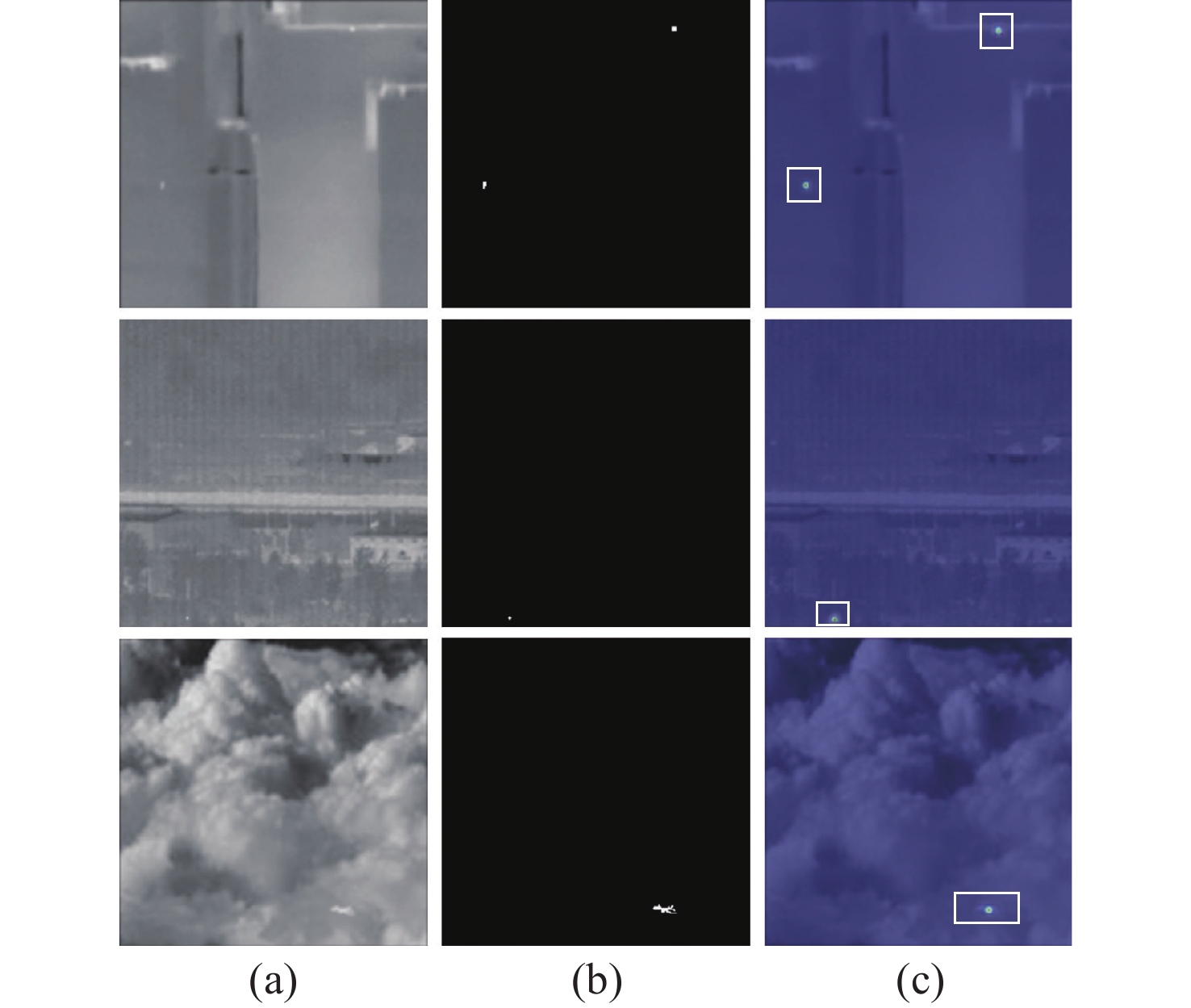
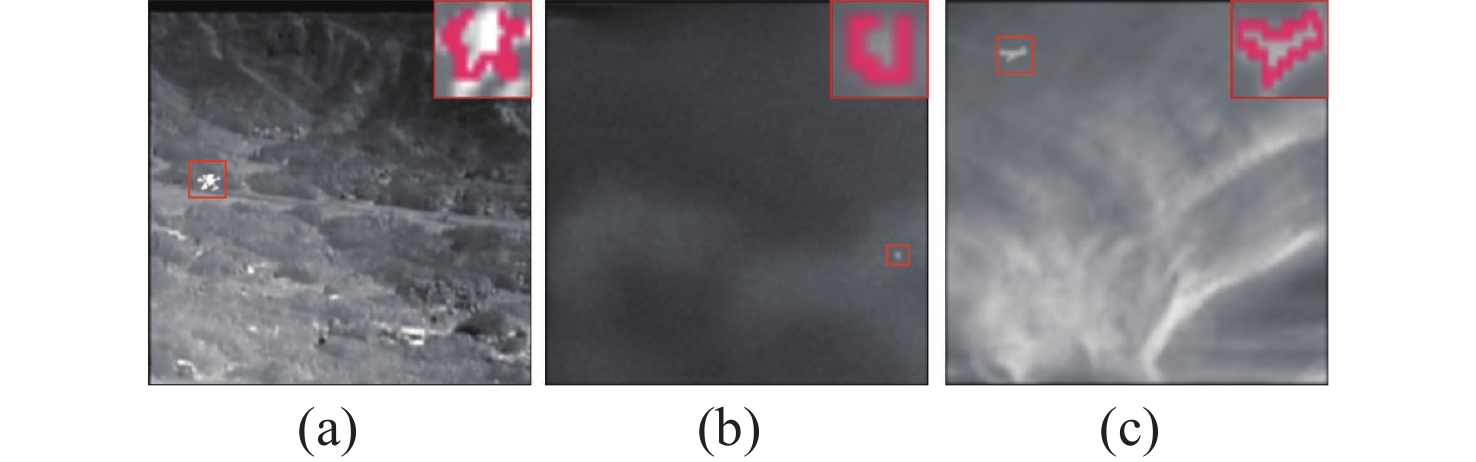
随着飞行器机动性能的提升,多帧红外小目标检测方法不足以满足检测要求。近年来,基于深度学习的单帧红外小目标检测方法取得了巨大成功。然而,红外小目标通常缺少形状特征,而且边界与背景模糊不清,给准确分割带来了一定的挑战。针对上述问题,本文提出难点注意力感知红外小目标检测网络。通过基于点的区域建议模块获取目标潜在区域,同时滤除多余背景。为实现高质量分割、细化掩码边界模块、判断粗掩码中无序、非局部难以分辨点,融合这些难点的多尺度特征,进行逐像素注意力建模。最后,由点检测头对难点注意力感知特征重新预测,生成精细分割掩码。在公开数据集NUDT-SIRST和IRDST上进行测试,平均精度均值mAP达到87.4和63.4,F值达到0.8935和0.7056。本文提出的难点注意力感知红外小目标检测网络可在多检测场景、多目标形态下实现准确分割,抑制误报信息,同时控制计算开销。
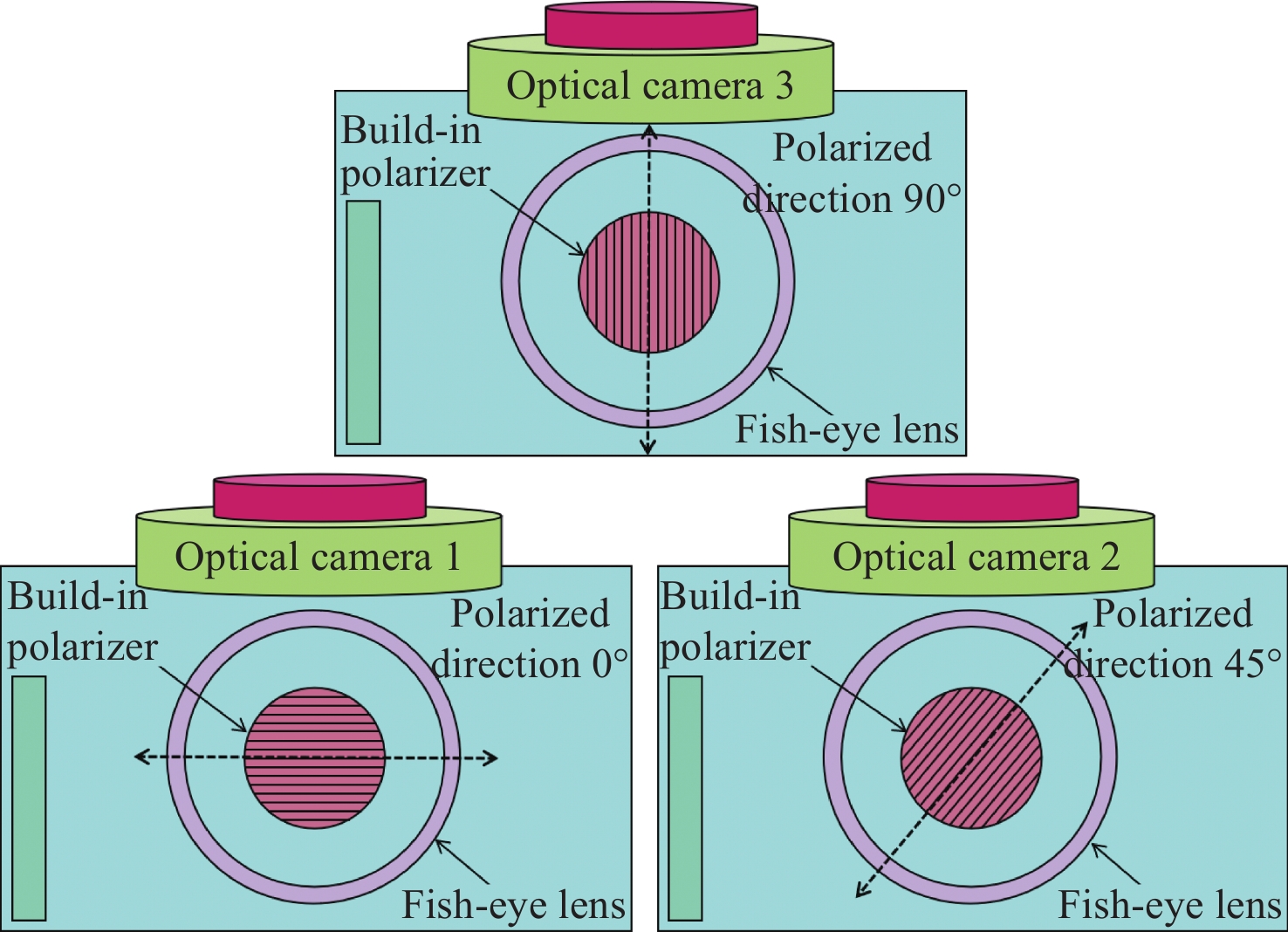
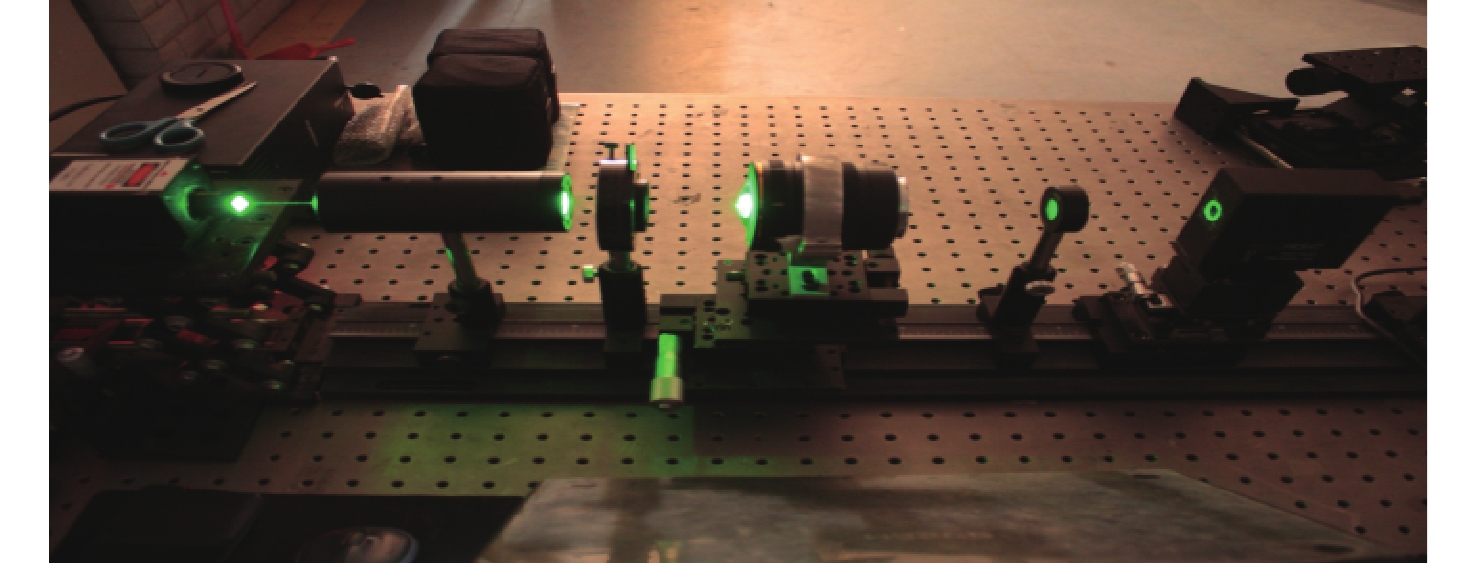
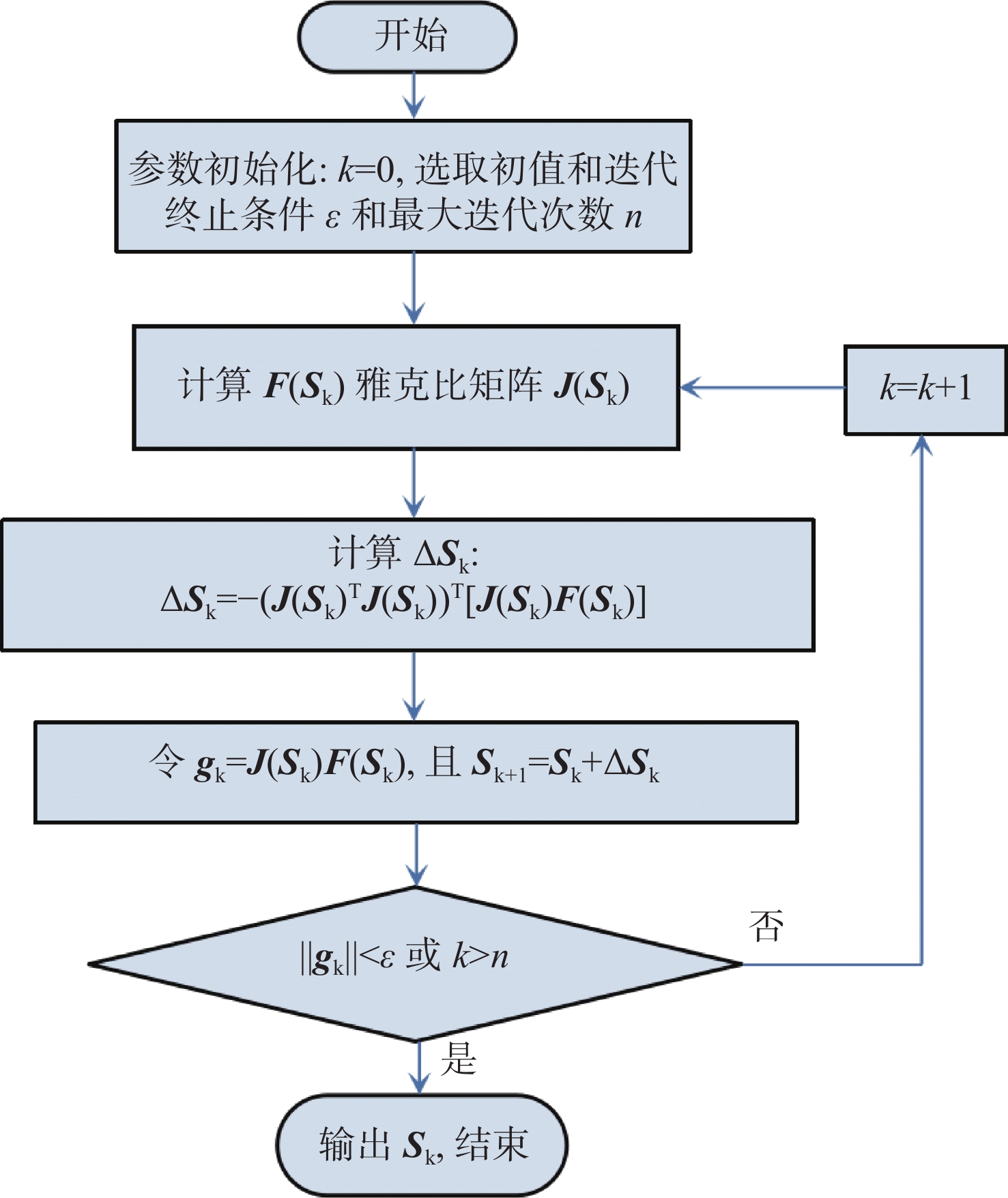
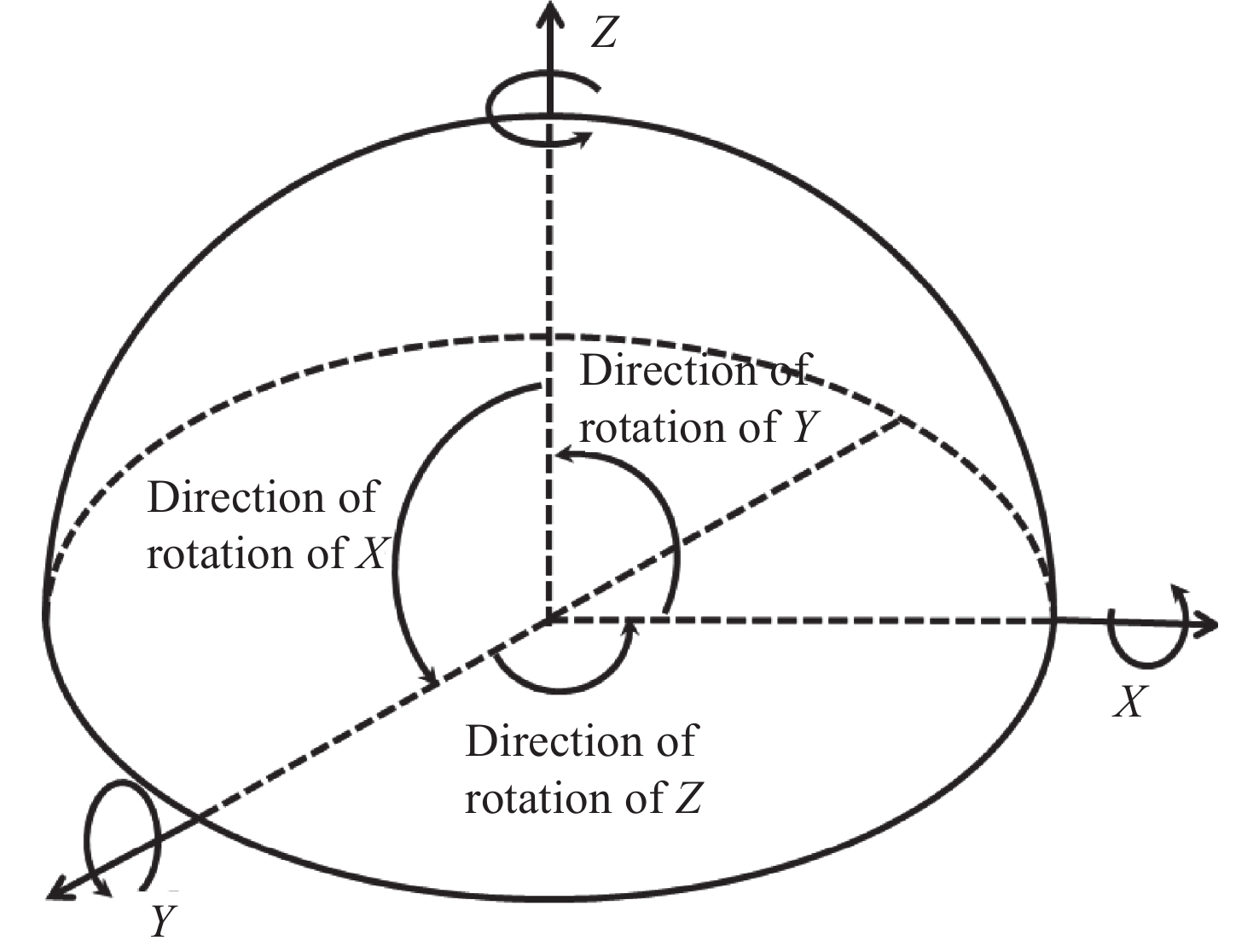
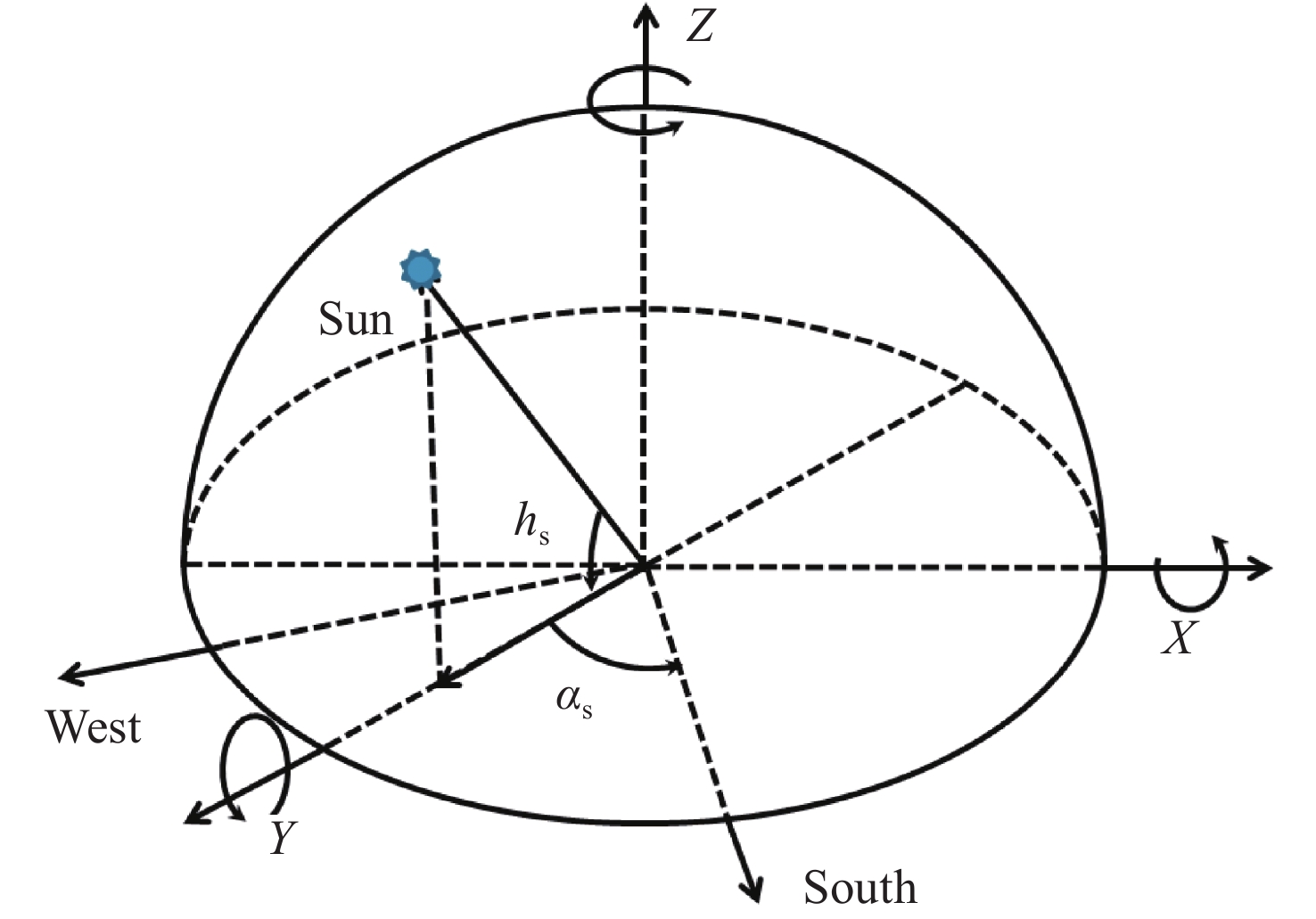
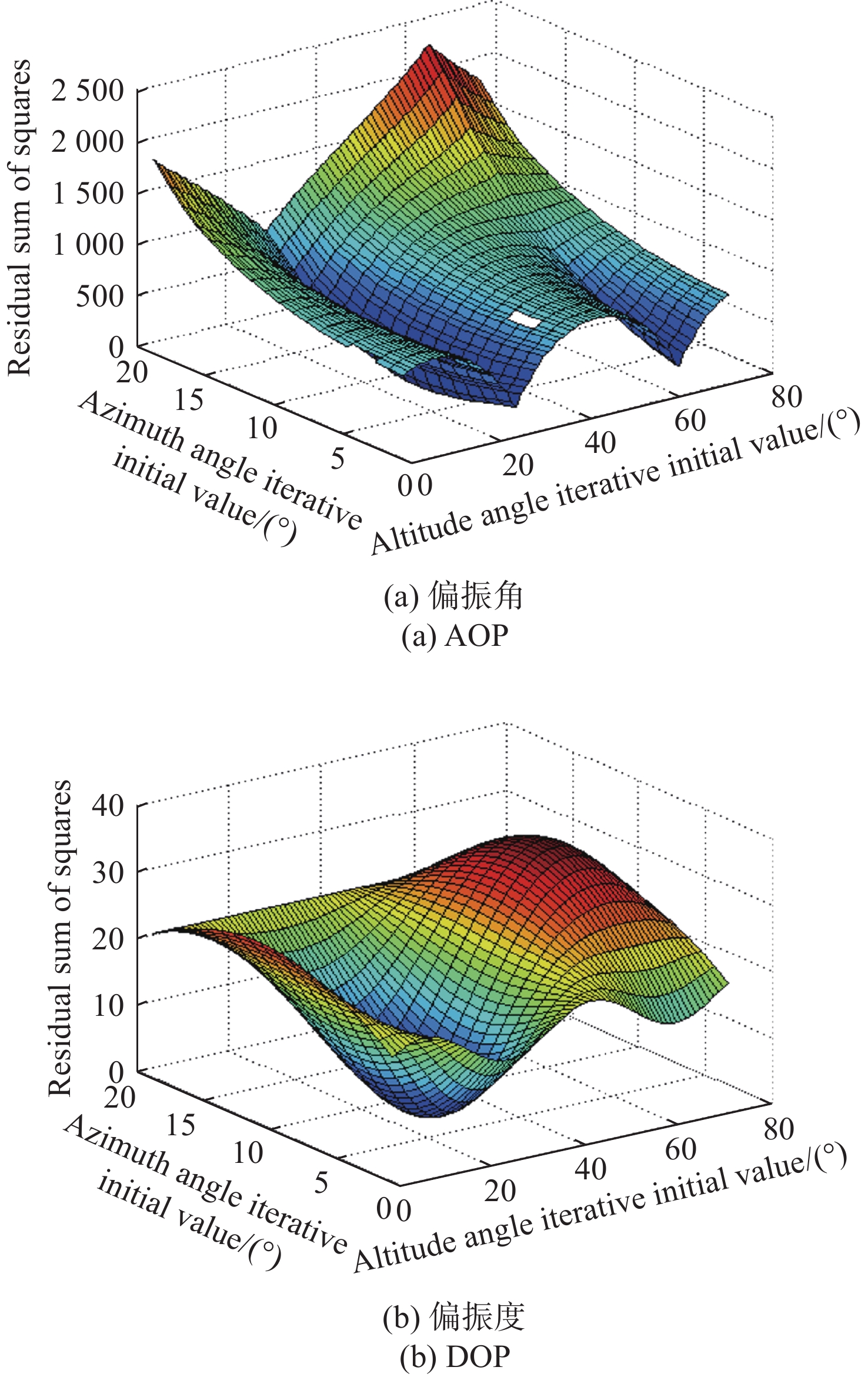
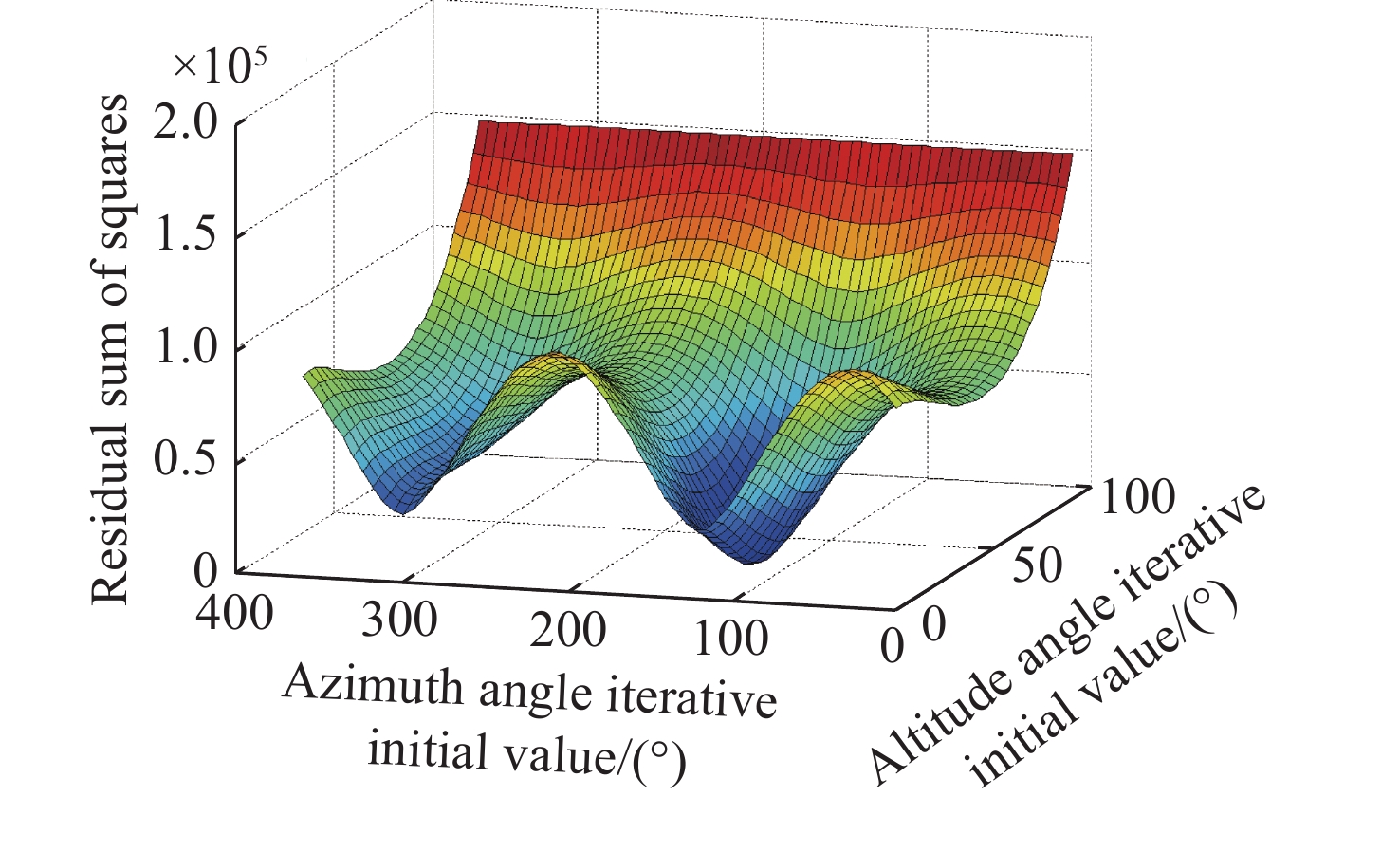
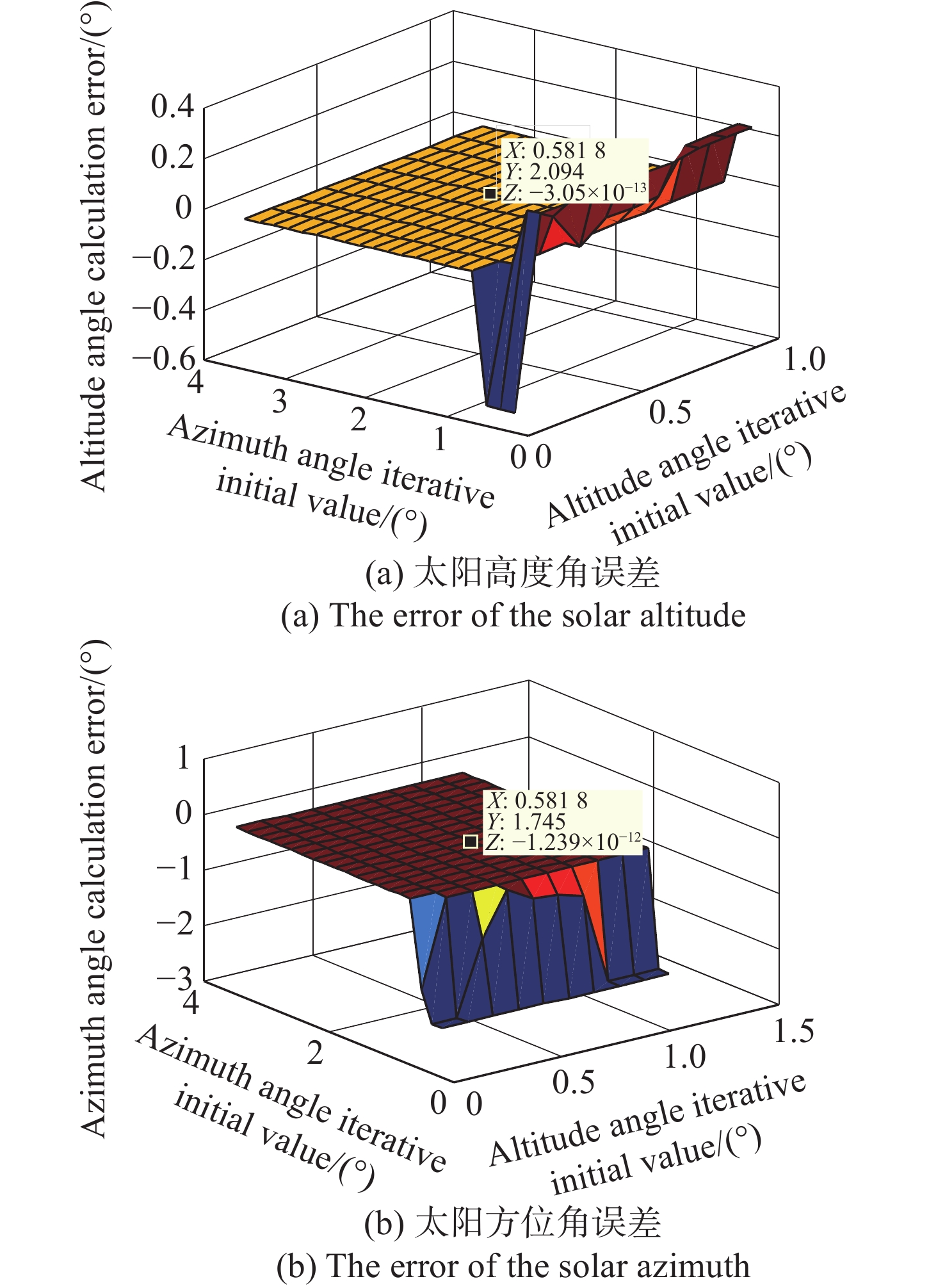
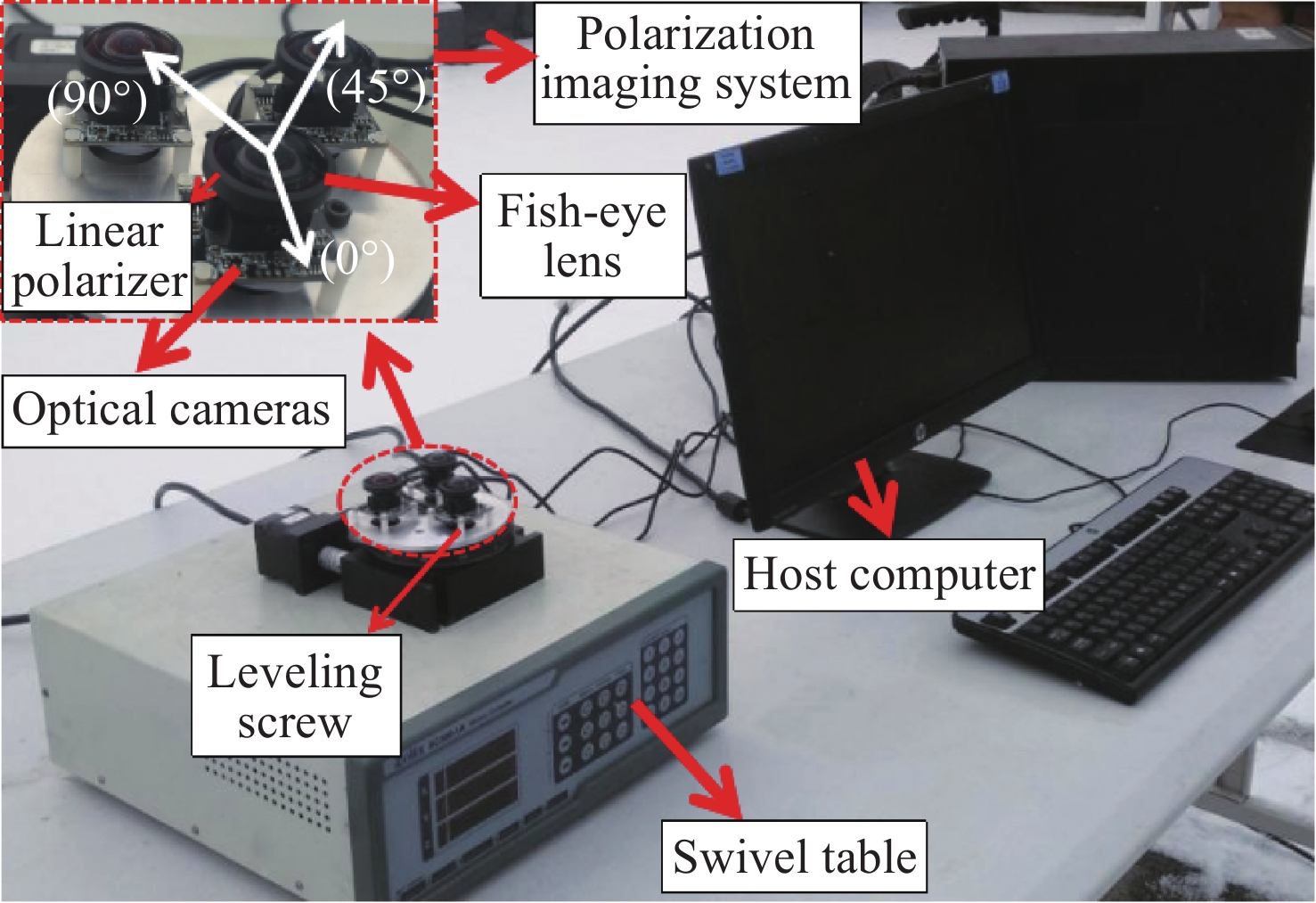
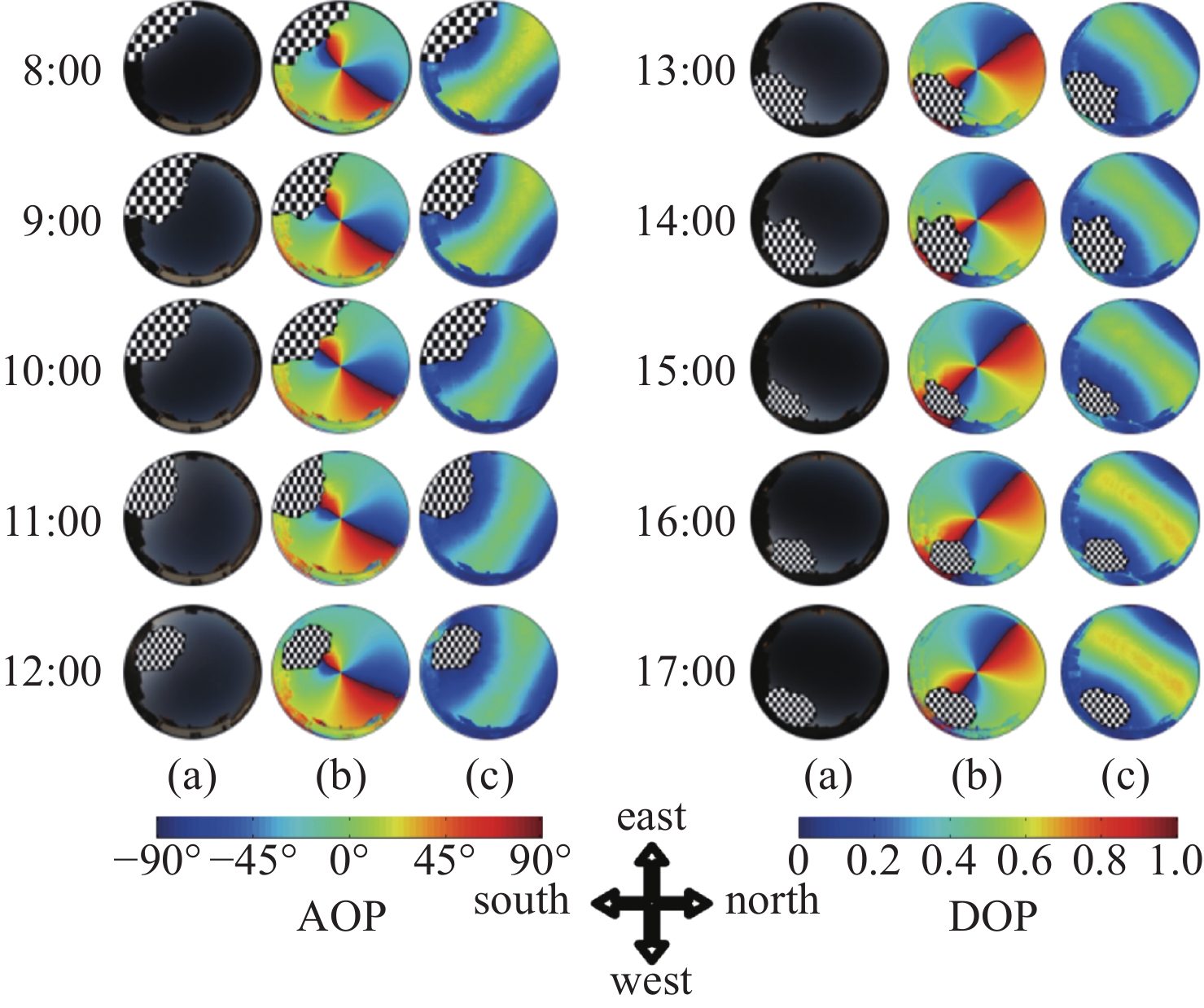
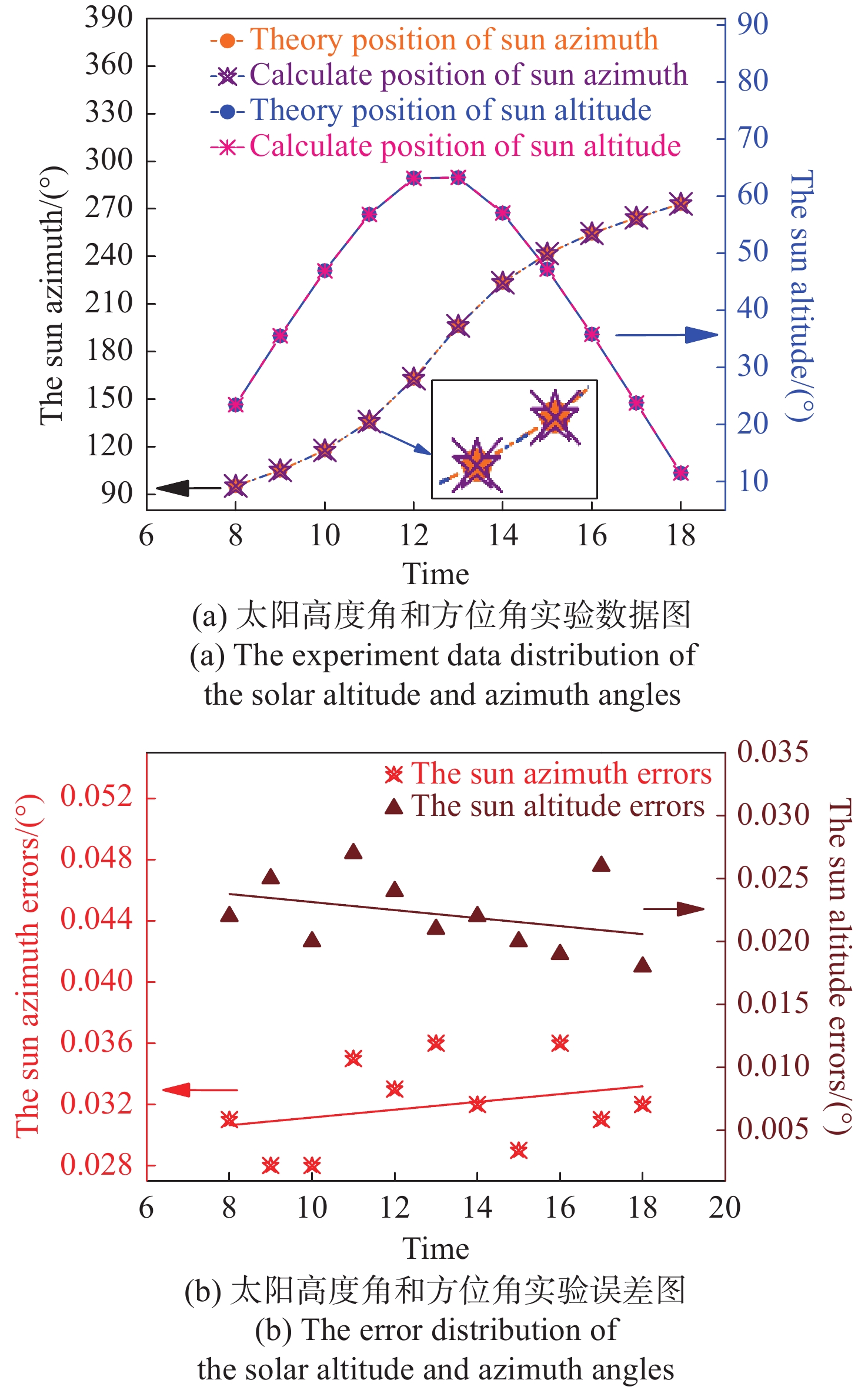
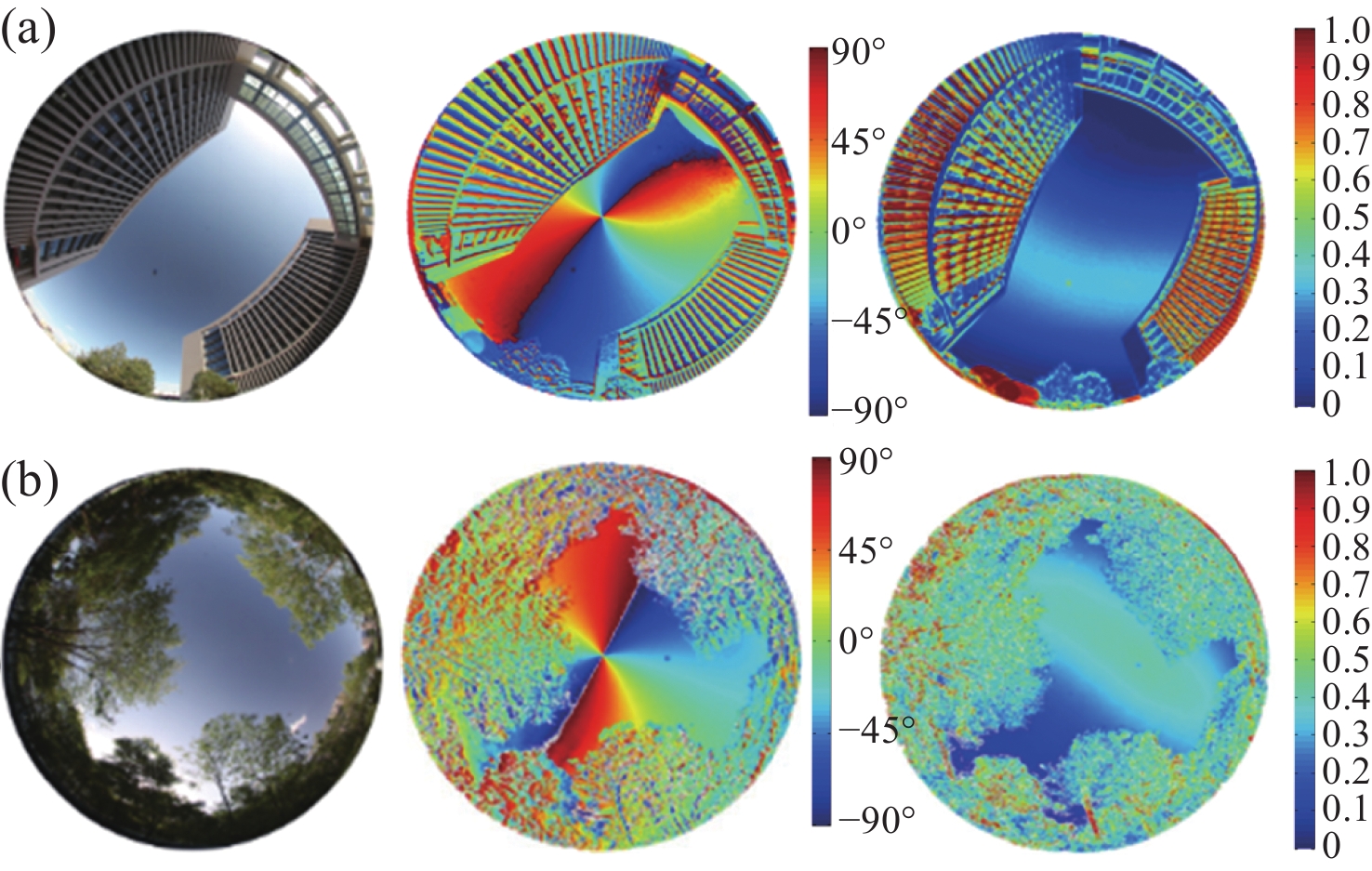
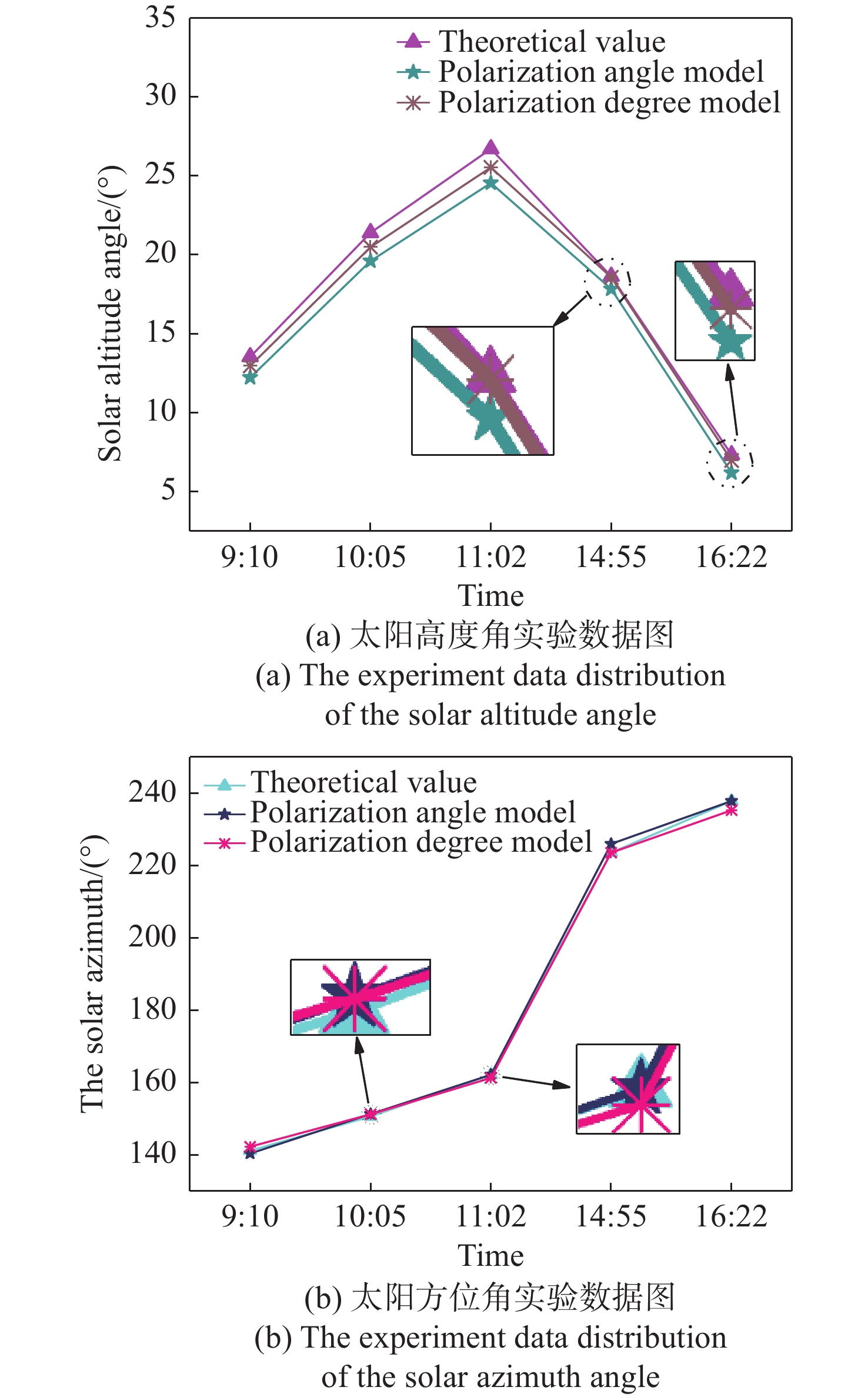
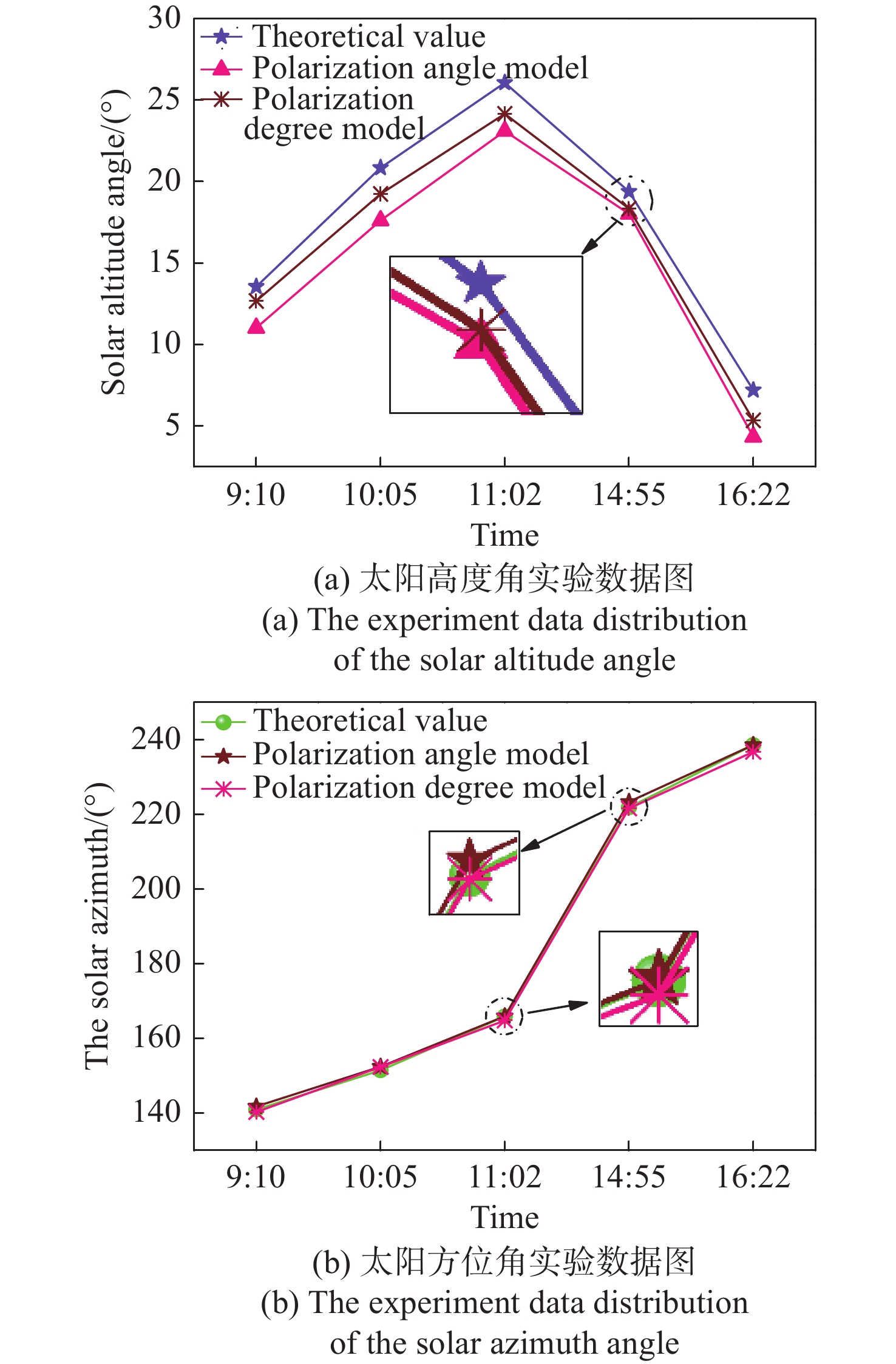
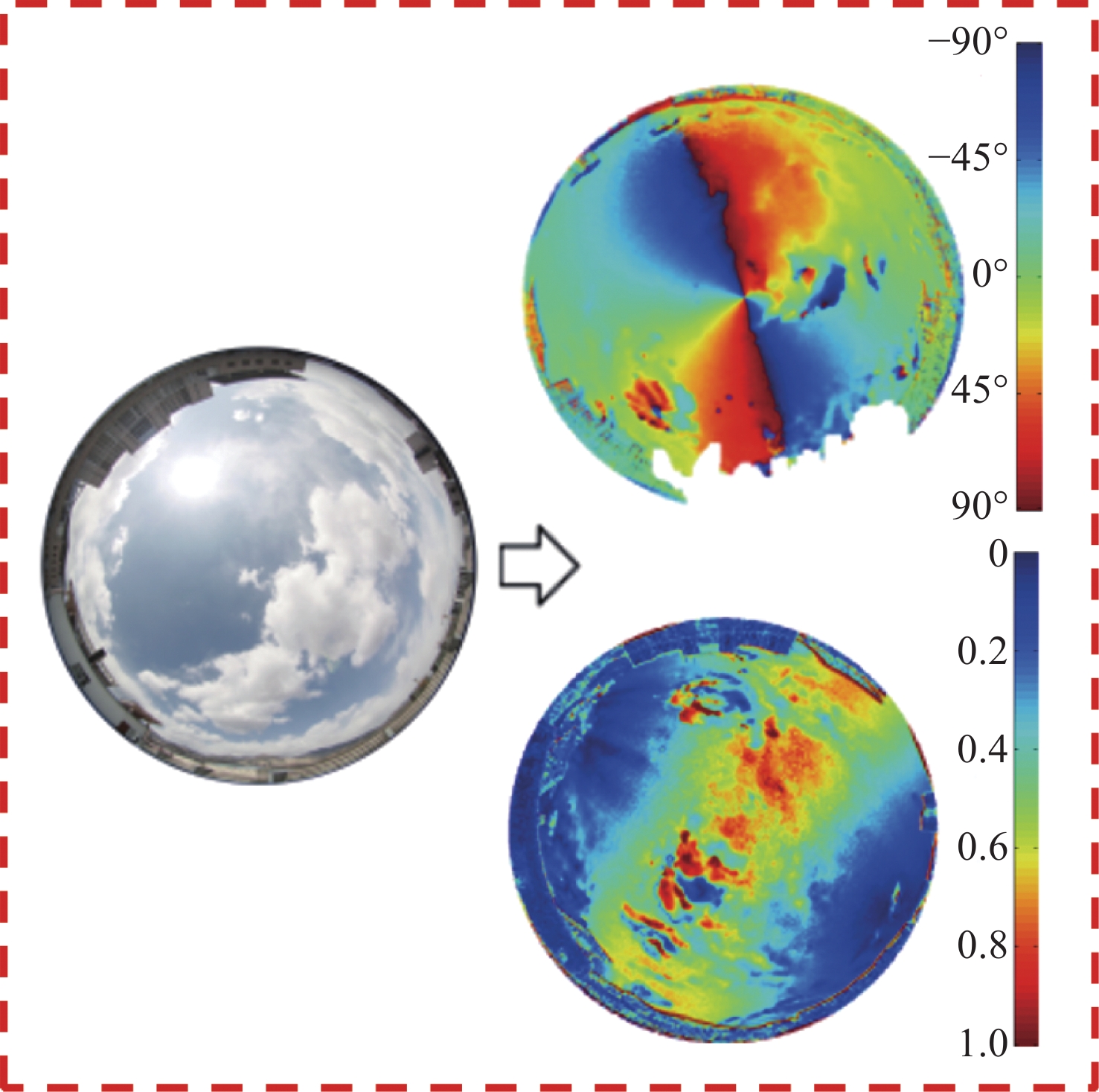
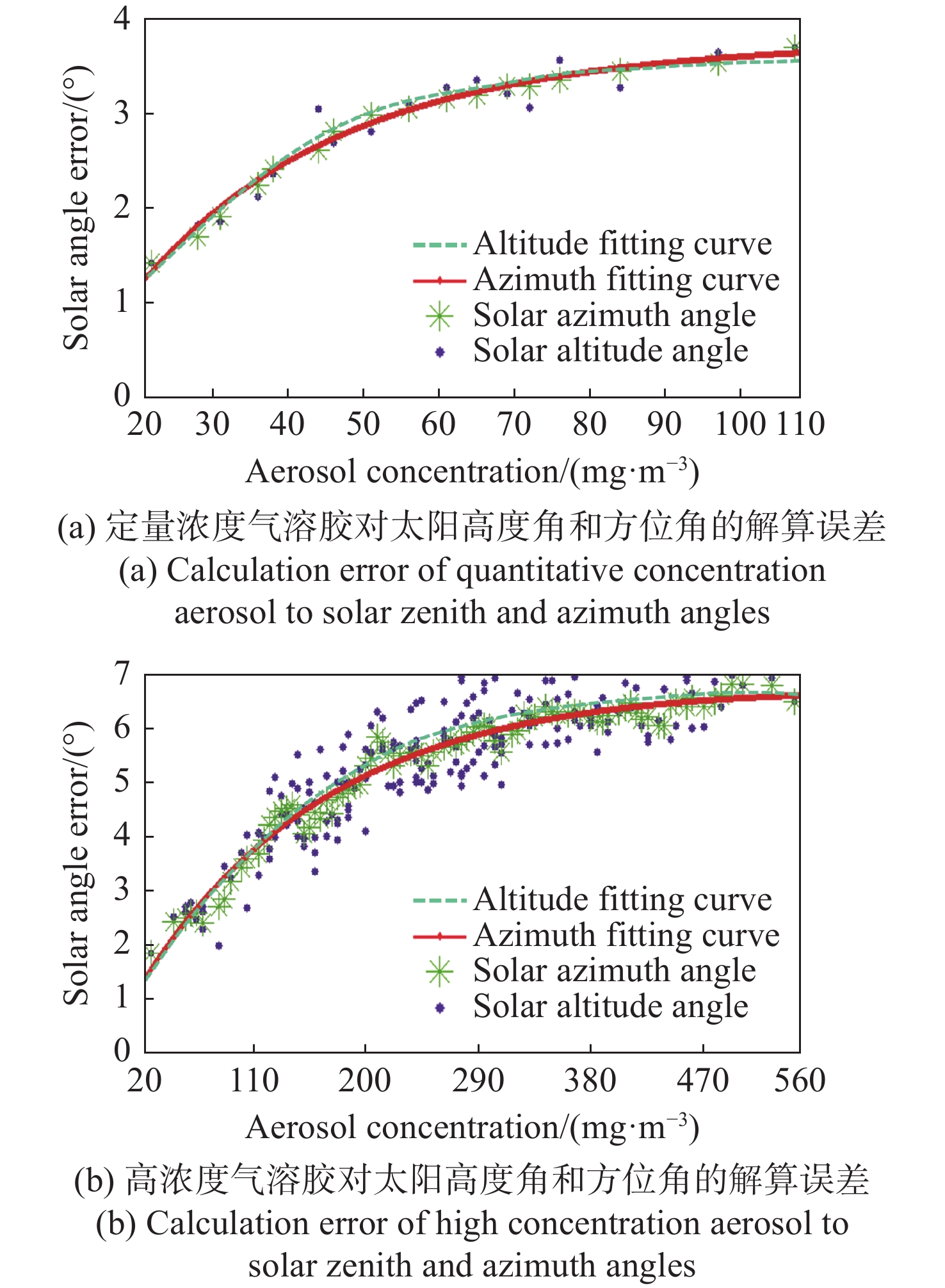
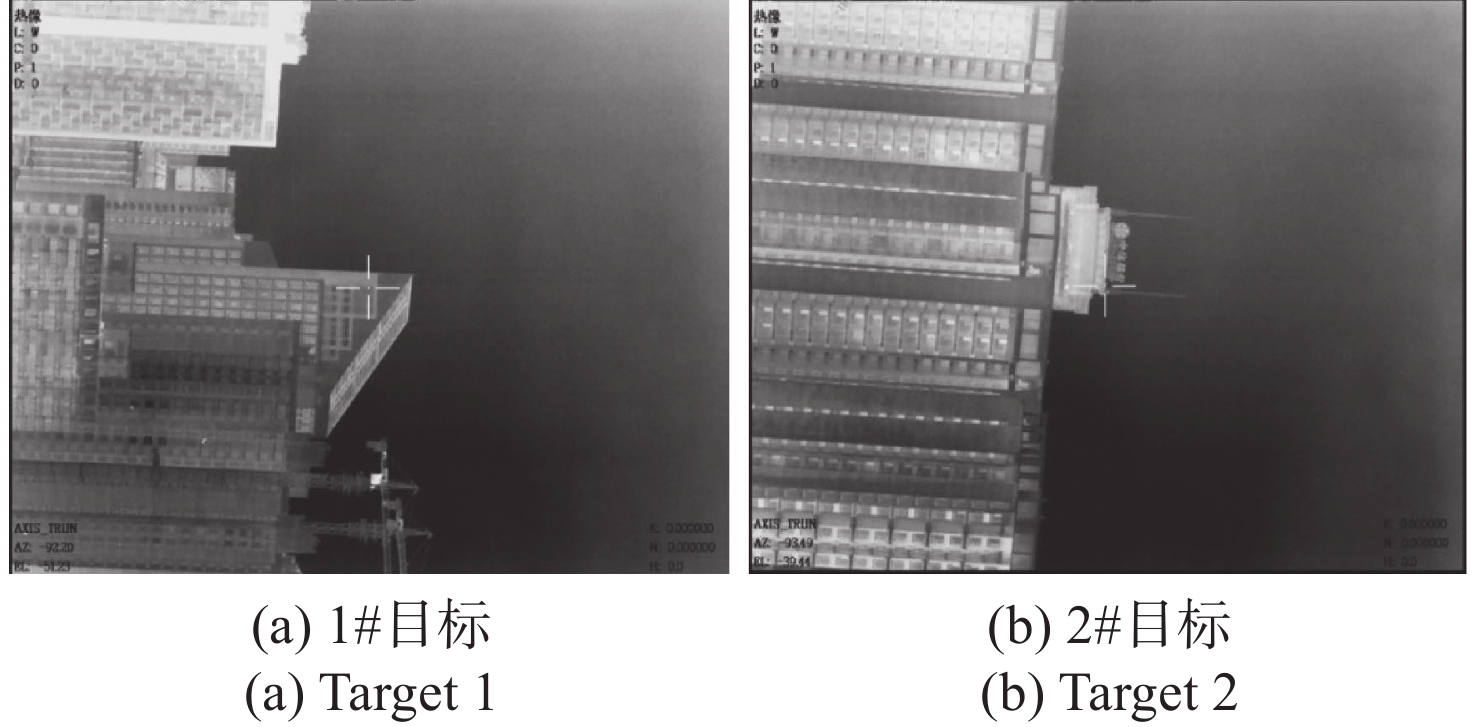
针对偏振光导航对天空中特征点精确位置信息的需求,提出一种基于全天域偏振模式成像系统对太阳位置进行精确检测的方法。与传统的基于光斑的太阳位置检测方法相比,该方法利用大气中固有的偏振信息完成对太阳位置的精确测量,具有检测方法简单、精度高且适用范围广等特点。搭建的光学采集系统由三个微小型的大视场摄像头模组和偏振片构成,使得结构更加紧凑,体积更小,高度更低。从原理出发,仿真分析太阳位置求解算法,采用搭建的光学采集系统对本算法在3种天气(晴天、遮挡、气溶胶)环境下进行验证。结果显示:当天气晴朗时,在同一天不同时刻,测量的太阳高度角和方位角的精度分别为0.024°和0.03°;当太阳被高层建筑物遮挡时,太阳的高度角和方位角的测量精度分别为0.08°和0.05°;当太阳被树木的枝叶遮挡时,太阳的高度角和方位角的测量精度分别为0.3°和0.1°。研究发现当气溶胶的浓度超过一定量时就会破坏偏振光的Rayleigh分布模式,进而会影响太阳位置的检测精度。实验结果表明,这种新型的检测方法不仅能够满足偏振光导航对太阳位置精确信息的需求,还能为喜欢探索宇宙奥秘的爱好者提供一种新的探索思路。


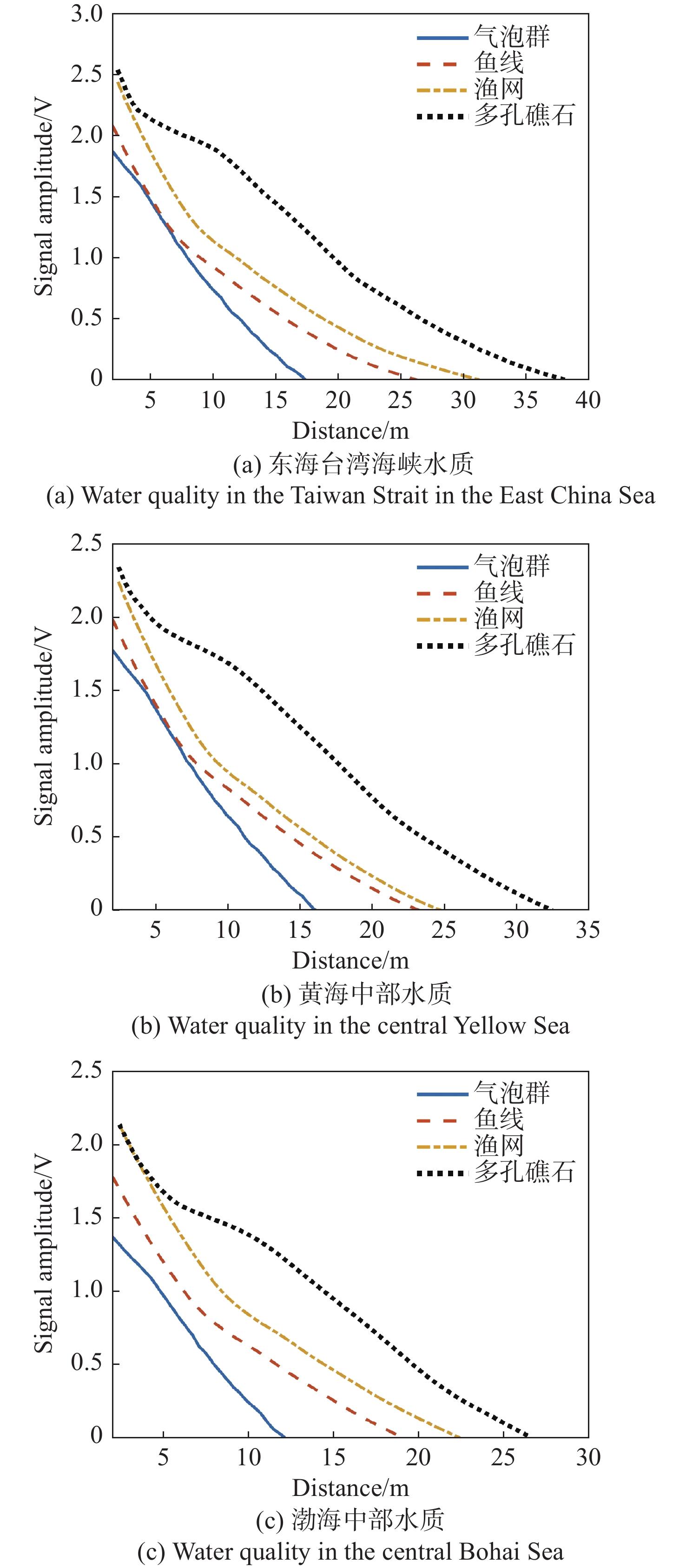
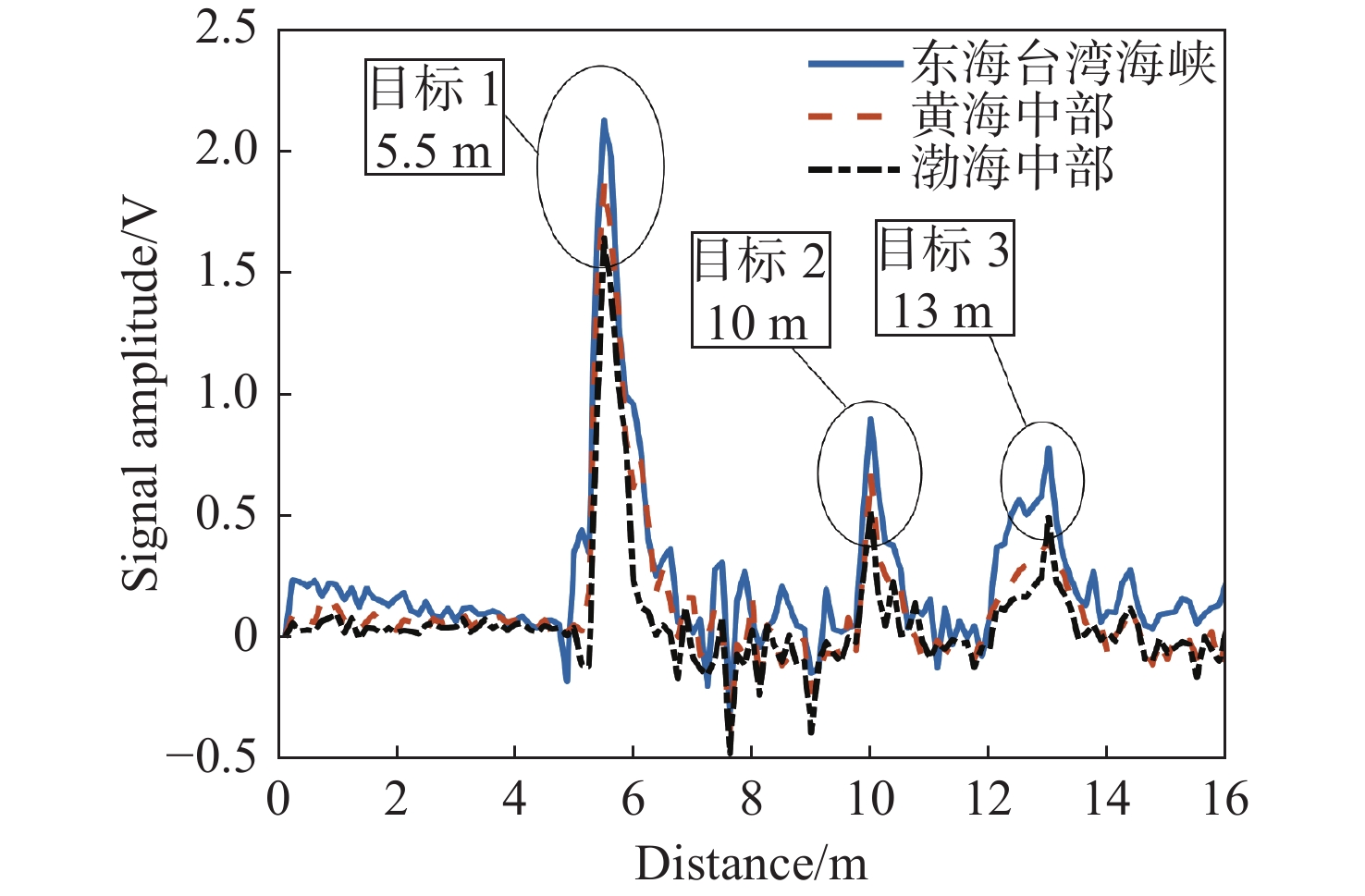
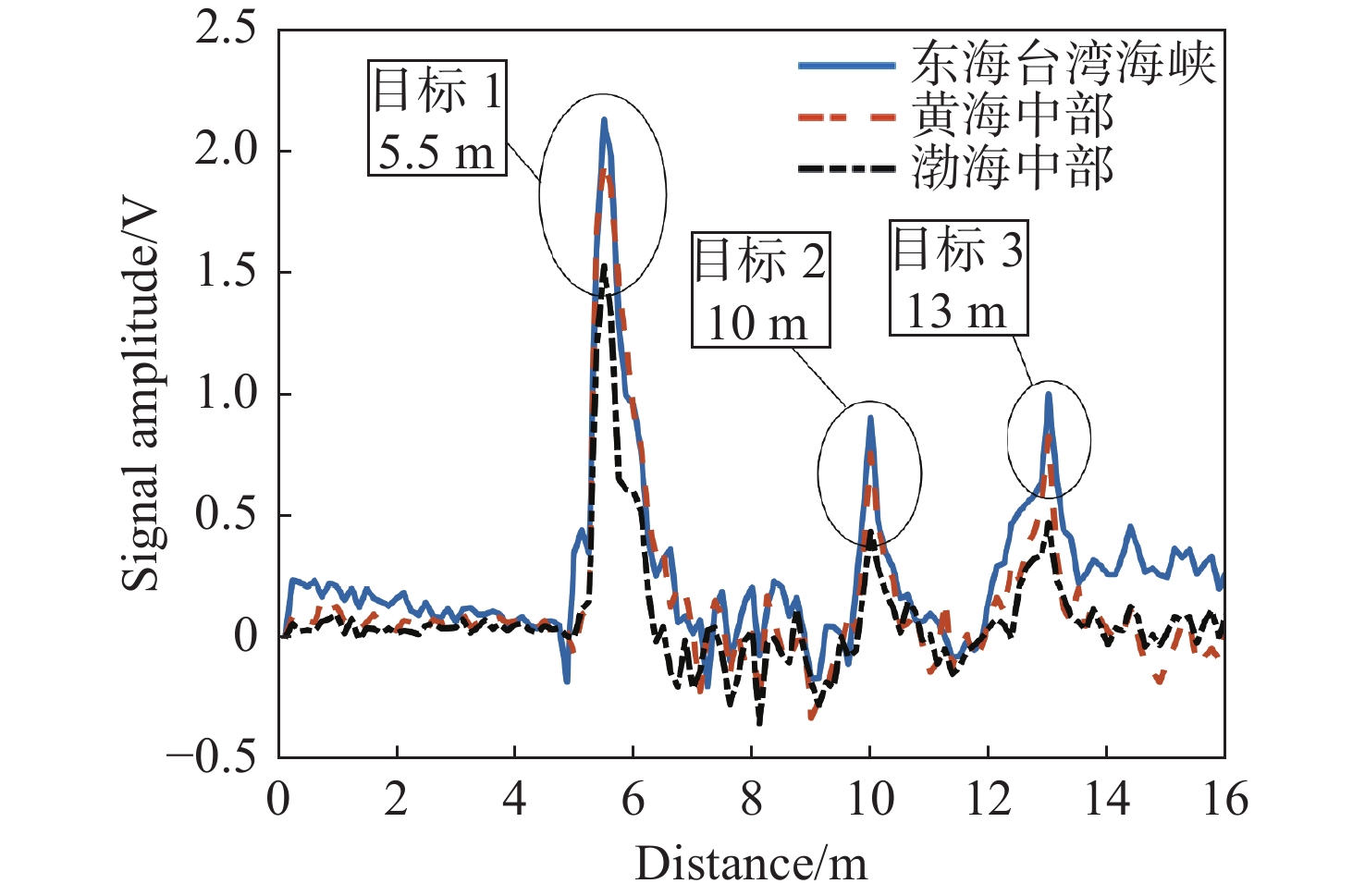
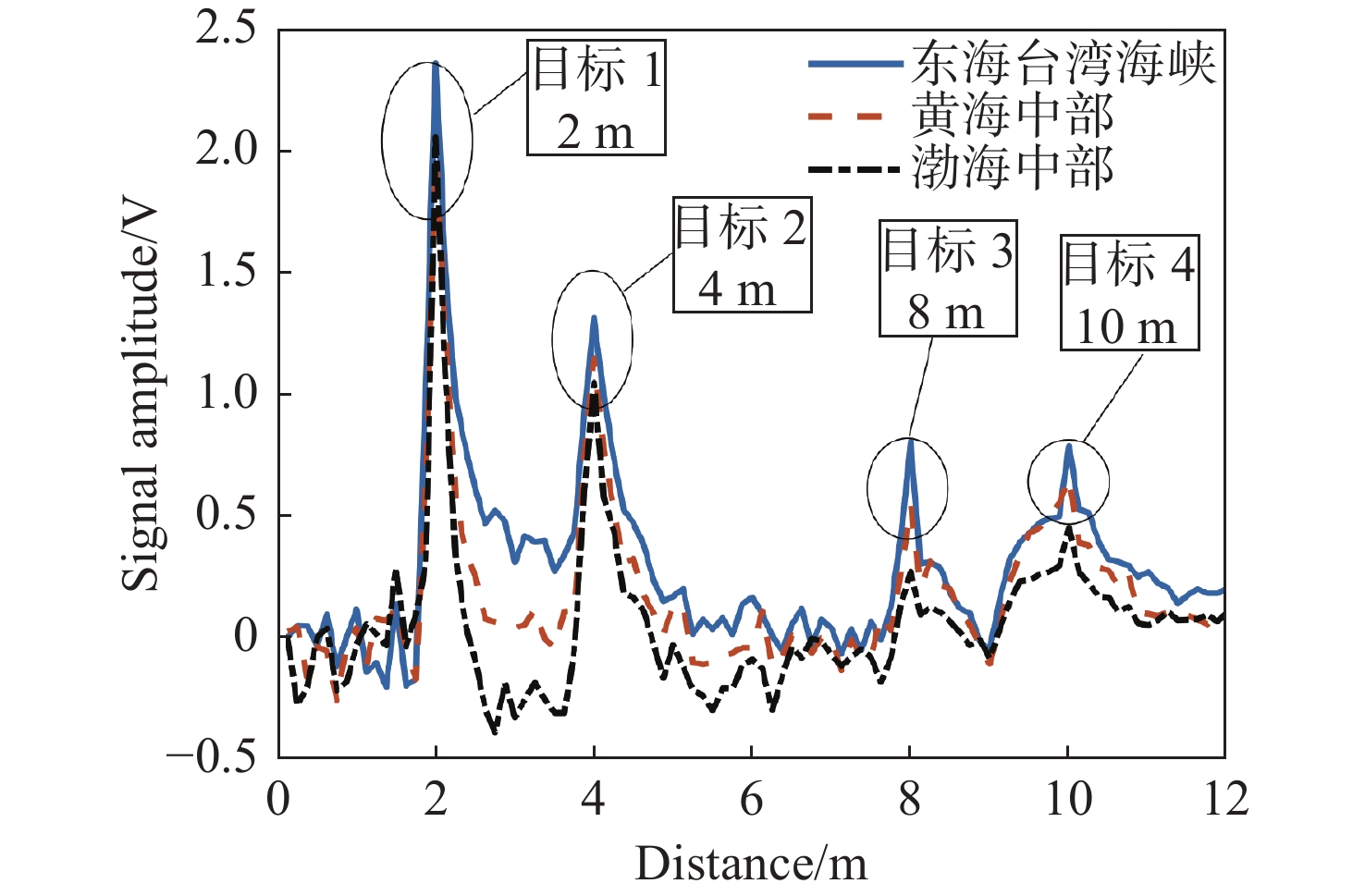
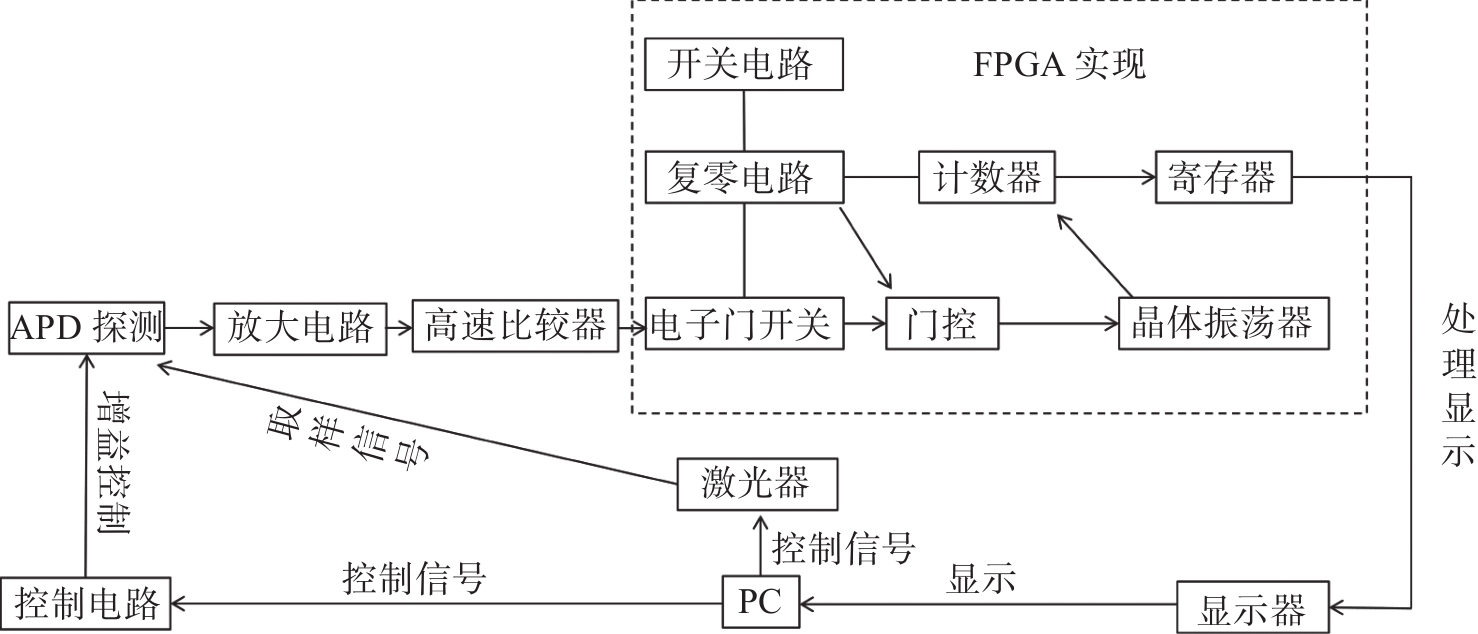
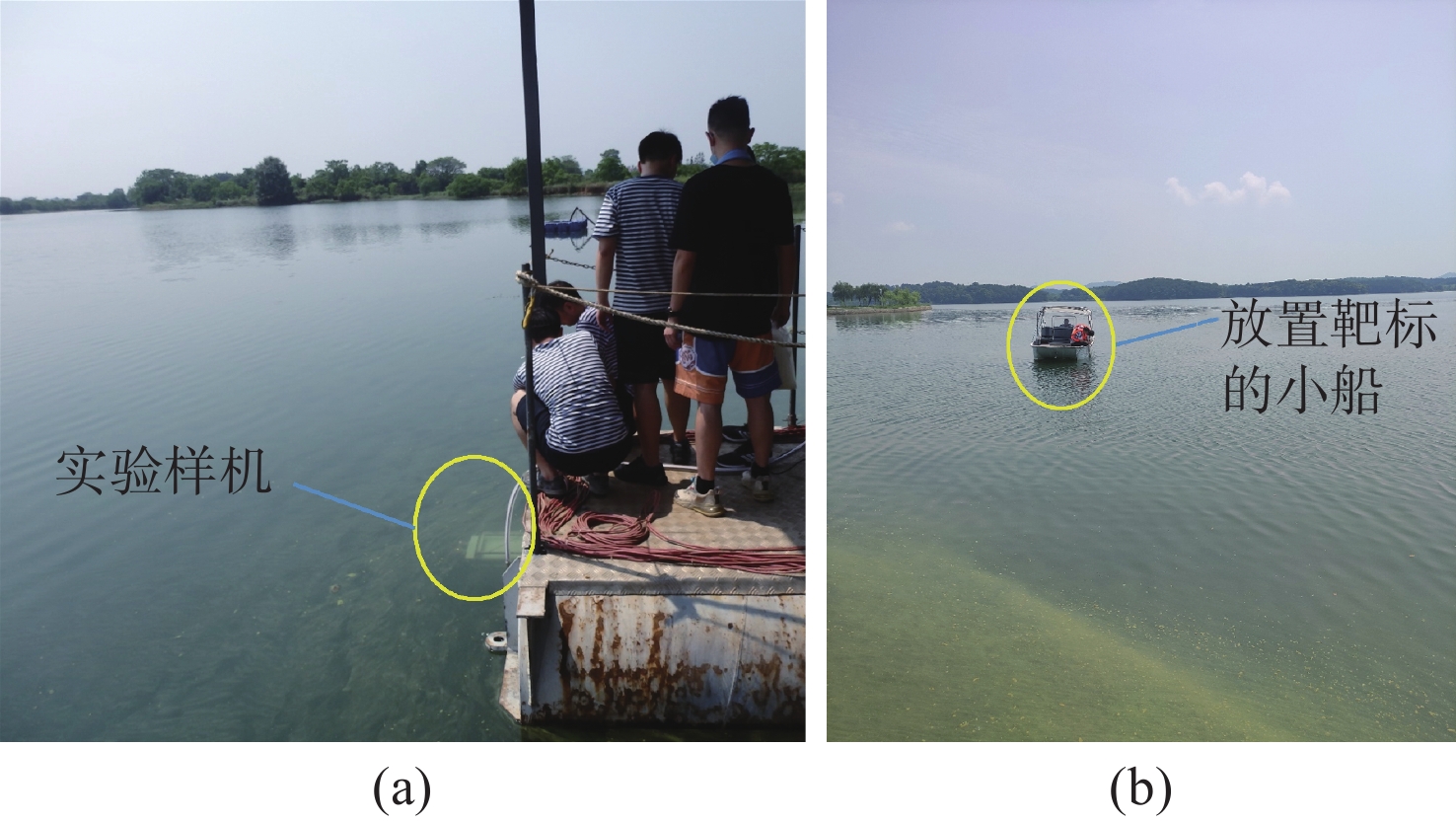
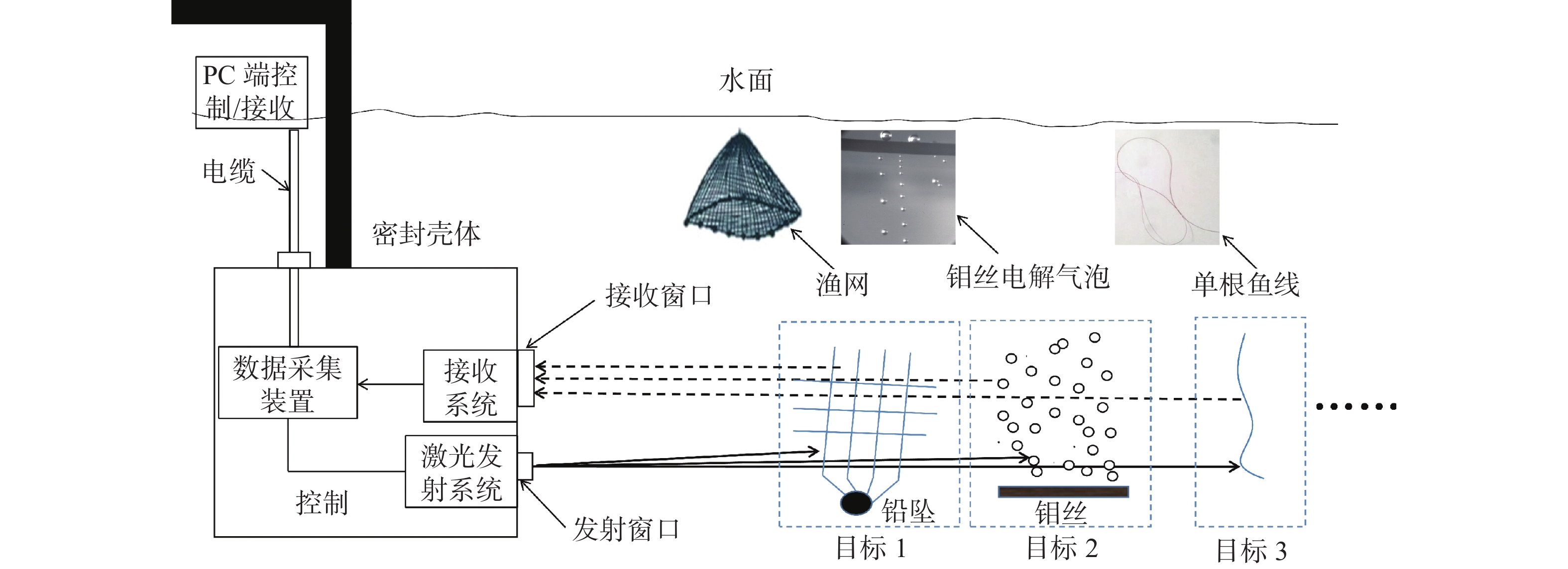
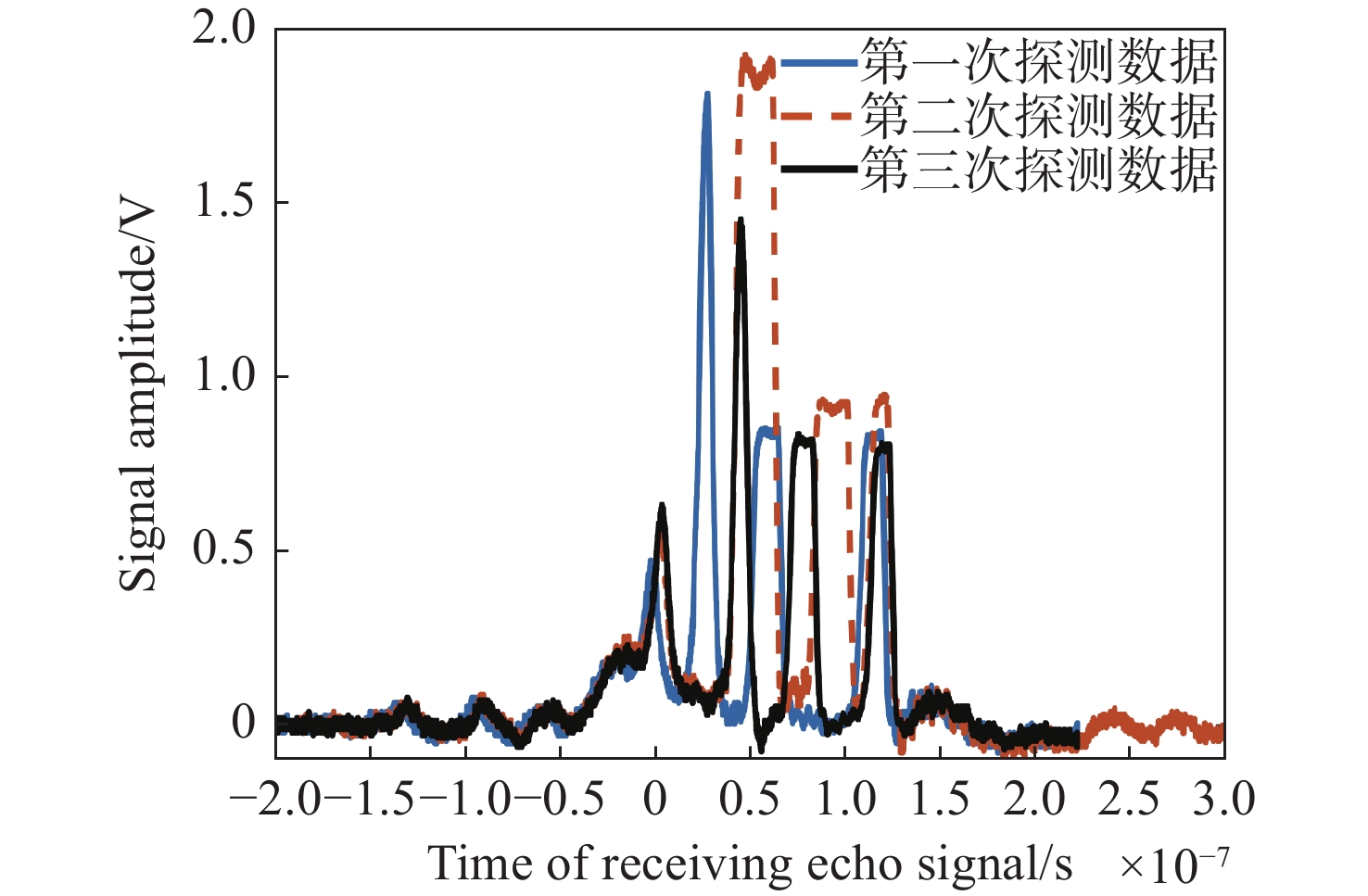
为了探究在近岸复杂水体中激光探测对微弱目标的探测能力,研究水质、目标特征、目标距离对水下激光探测的影响具有重要理论和应用价值。论文建立了水下微弱目标激光探测模型,采用蒙特卡洛仿真验证了不同浊度微弱多目标激光探测性能,模拟了不同距离下微弱目标的激光后向散射回波信号,对多个不同反射系数的目标后向散射回波特性进行了分析。同时设计并研制了灵巧便携式水下微弱目标激光探测系统,进行了实验室及外场湖泊环境下的多目标探测、测距测试验证。在浊度为12.87 NTU的近岸湖泊水域,该系统可在10 m范围内对3~4个直径为80~400 μm的不同低反射系数的混合小目标进行有效探测,平均测量误差为±0.11 m,与理论仿真结果一致。本文研究结果可为蓝绿激光水下多微弱目标探测链路计算、系统设计及参数优化提供参考,可以支撑近海浑浊水体下水下障碍物激光探测工程实践。






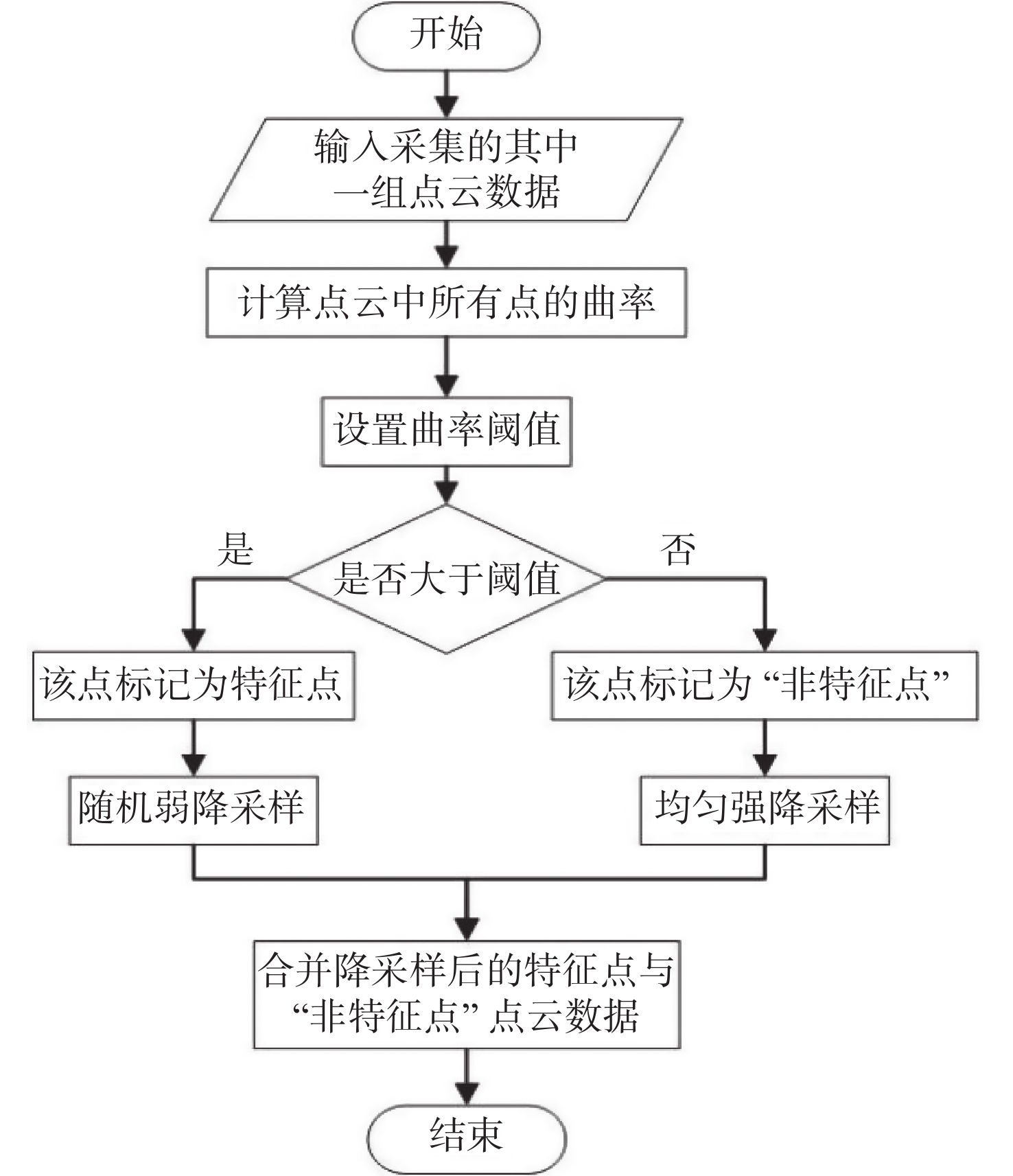
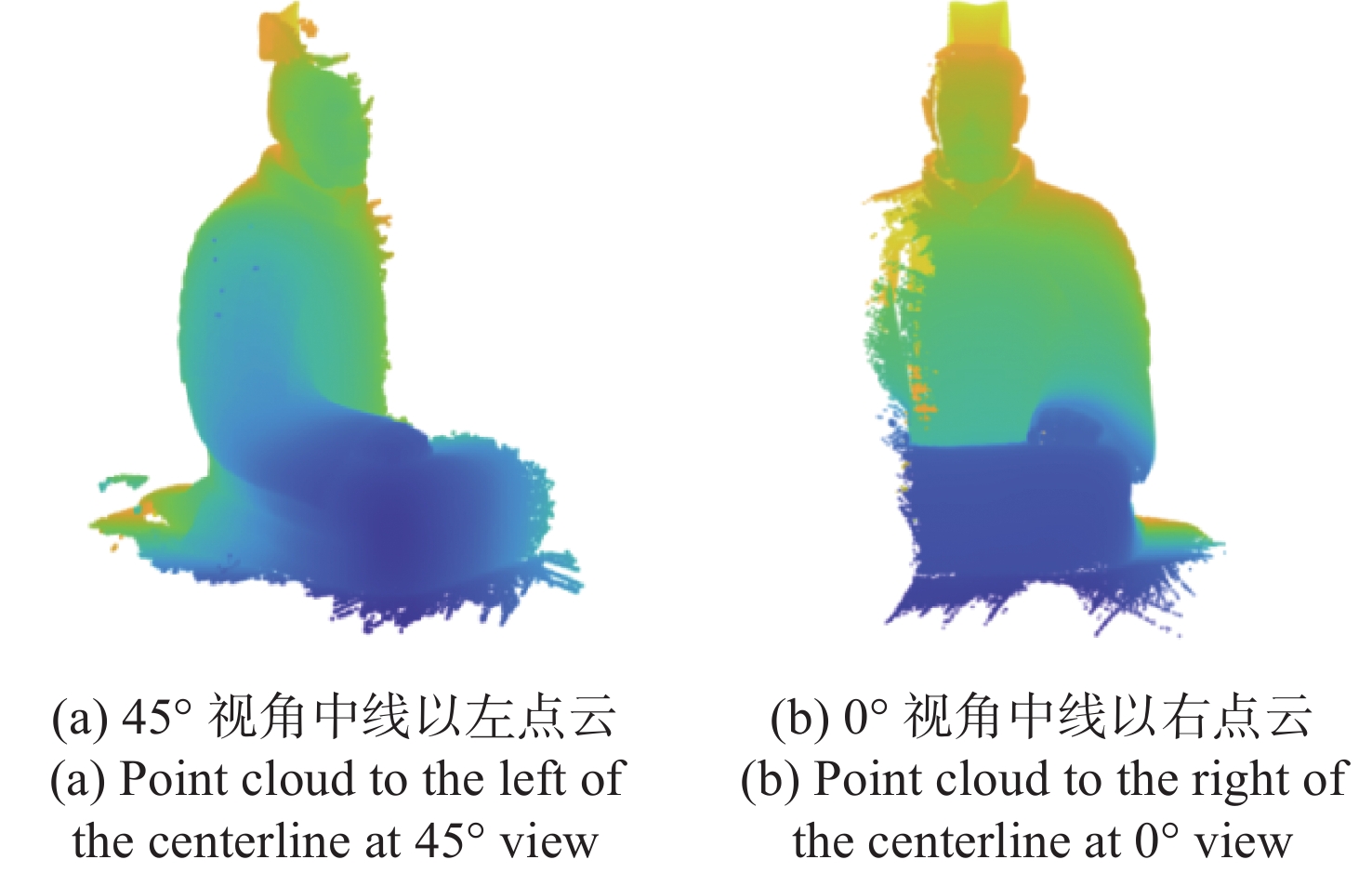
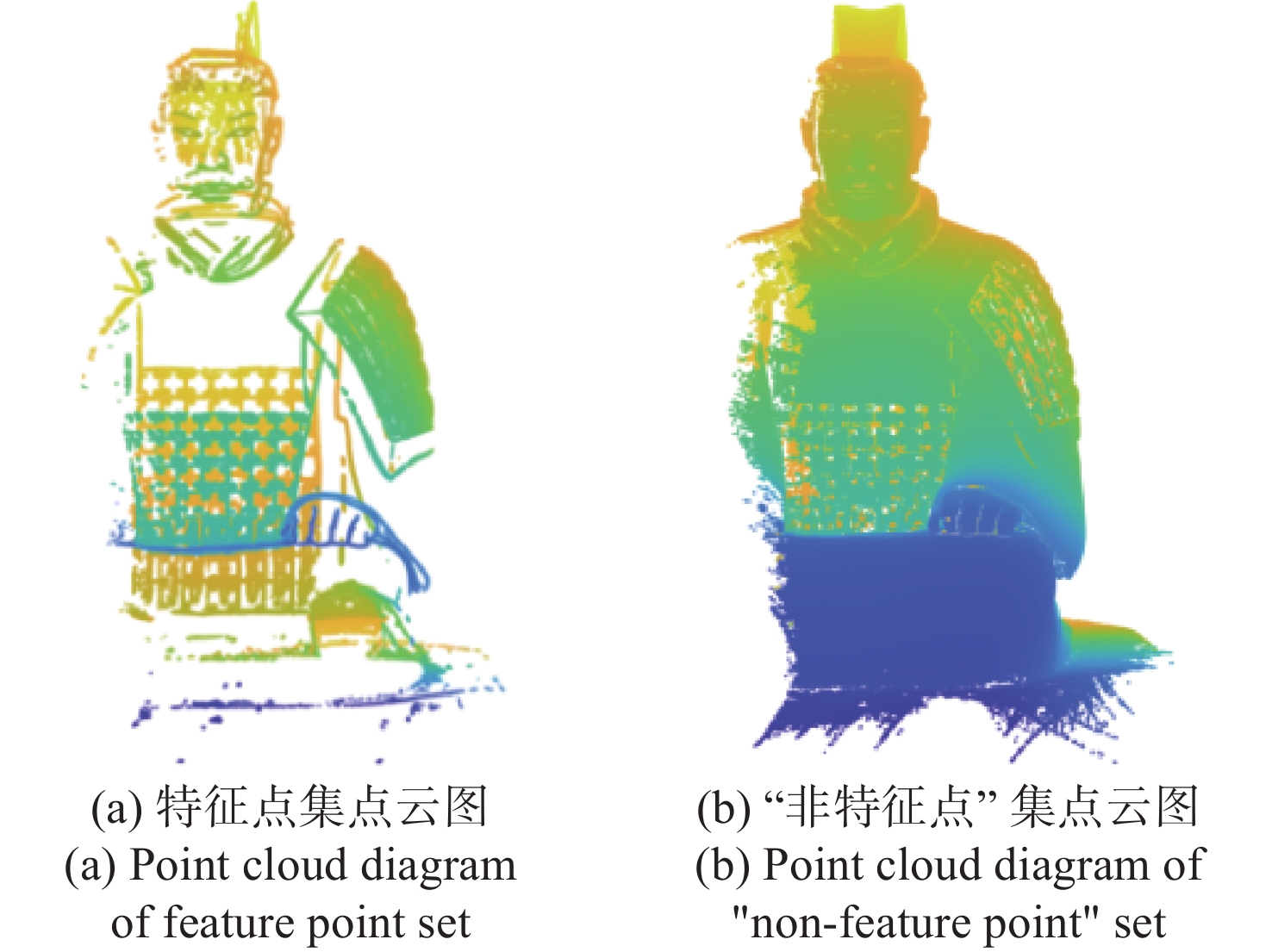
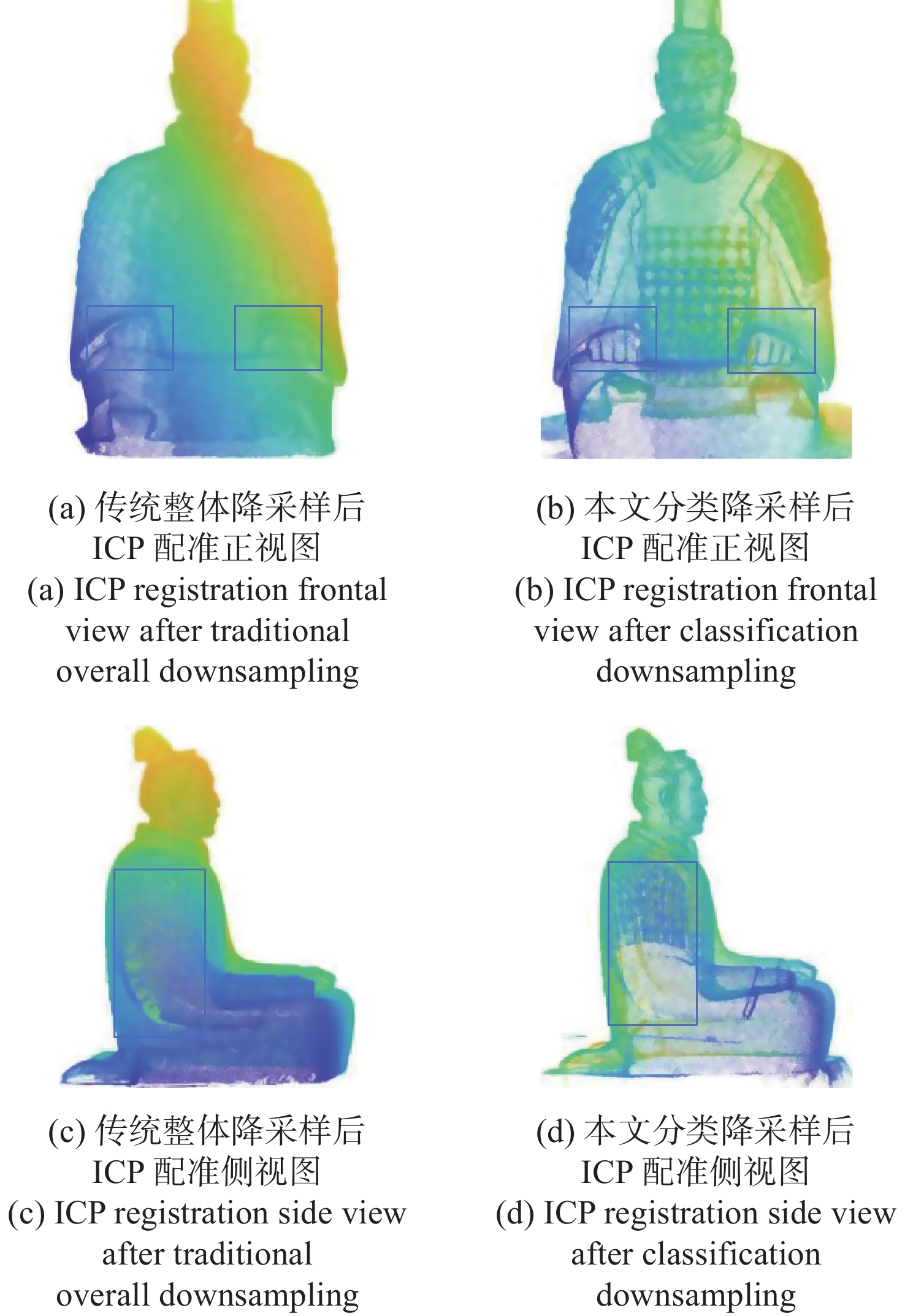
三维重构是文物数字化的关键技术,其中三维点云配准精度是评估重构质量优劣的重要指标之一。实际采样中,文物点云细节信息繁多,传统降采样后易出现细节缺失从而影响配准精度。为了解决这一问题,本文提出了一种基于曲率特征的文物点云分类降采样与配准方法。首先,通过线性矩阵激光测量获取文物的三维点云数据。其次,计算所有点的曲率值,并设置曲率阈值进行点云分类,不同点集按照其特征属性进行不同权重的降采样,从而最大限度地保留点云的形态特征和细节信息。最后,通过求解刚性变换模型实现点云配准。点云配准前的降采样处理后点云数据降至原始点云的1/3,与传统的整体降采样ICP方法相比,平均距离从0.89 mm约降至0.59 mm,标准偏差从0.29 mm约降至0.18 mm。在降低点云数据的同时也保证了配准的精度,适用于不同类型的文物点云数据。


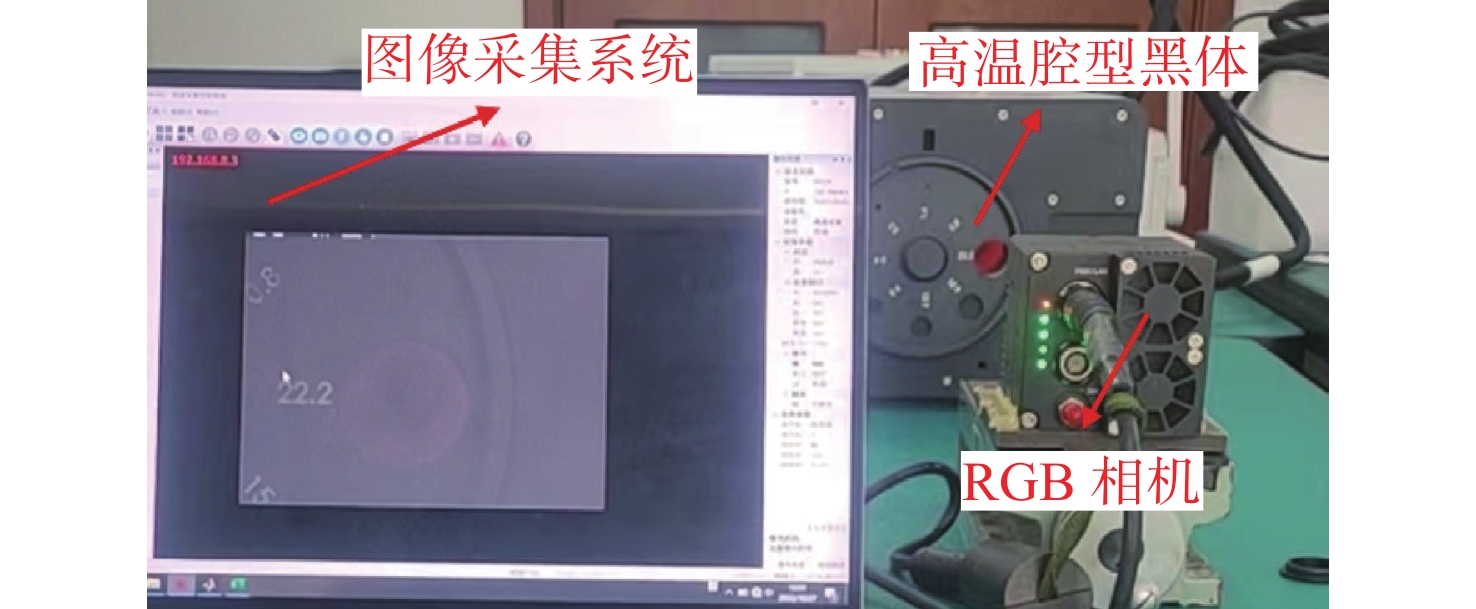
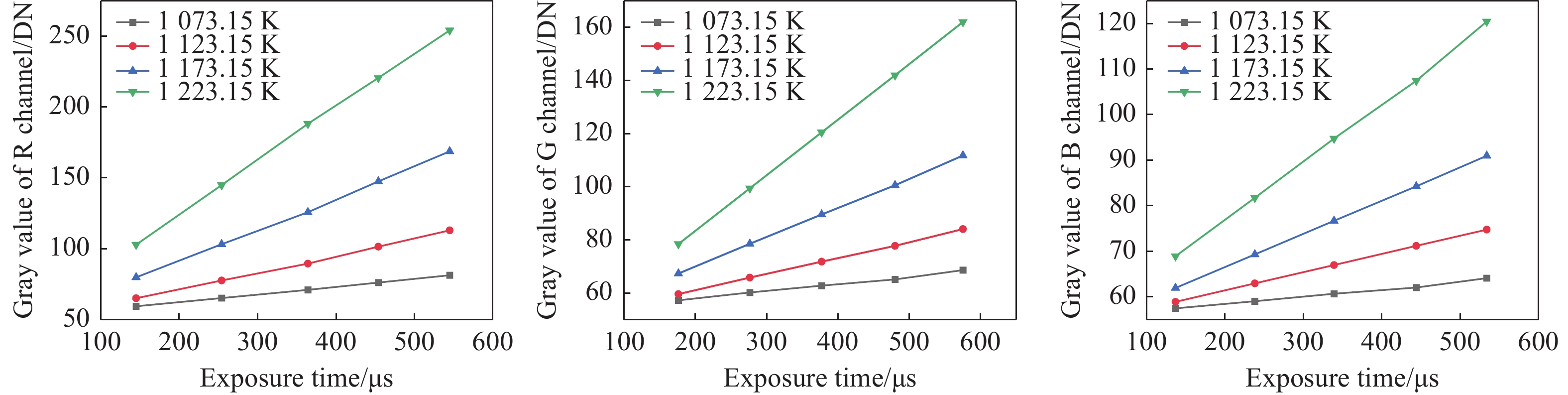
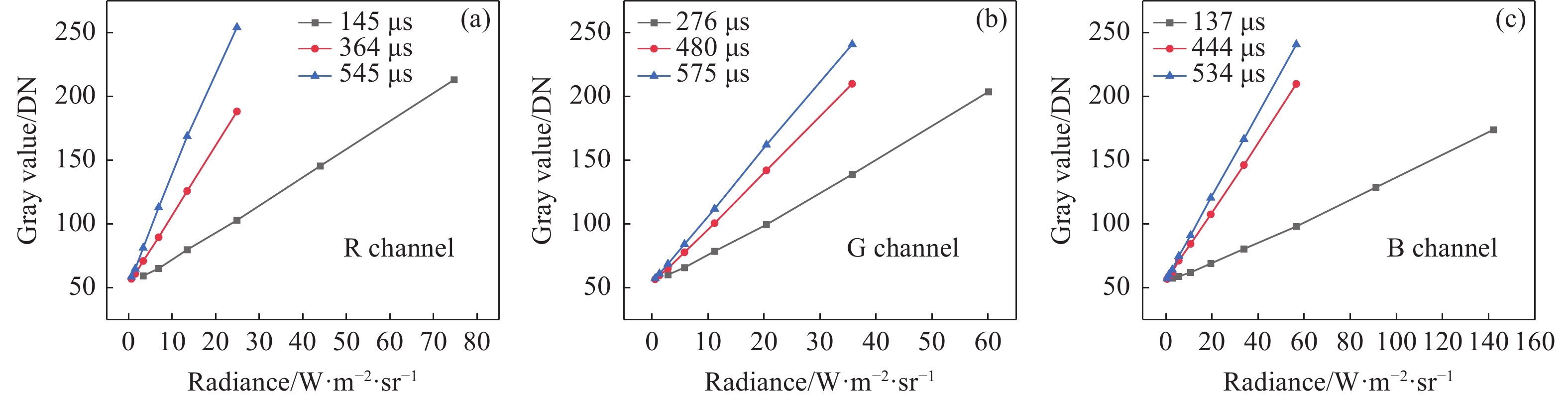
为了提高可见光波段(0.3 μm~0.9 μm)高温标定的效率,提出了可见光波段高温标定的简化方法。本文提出了带有曝光时间变量的可见光波段的高温标定模型,通过大量实验发现,RGB相机各个通道的灰度值不仅随曝光时间递增呈线性变化,且随黑体辐射亮度的递增也呈线性变化,进而确定了可见光波段高温标定模型的具体形式。为了求解简化后的可见光波段高温标定模型中的未知数,在两个黑体辐射亮度下,分别采集两个曝光时间下的图像数据,接着,对图像数据进行处理,便可以得到任意曝光时间下的RGB相机高温标定曲线。最后,对本文提出的简化可见光波段高温标定方法与常规按曝光时间进行可见光波段高温标定法进行比较。实验结果表明:R、G、B通道计算值与标定值的相对误差最大值分别为3.38%、2.56%和−1.14%,且各通道的计算值与标定值的相对误差均未超过3.50%。本文提出的数学模型可以有效地简化传统的高温标定法,进而大大缩短了高温标定时间,提高了高温标定的标定效率。
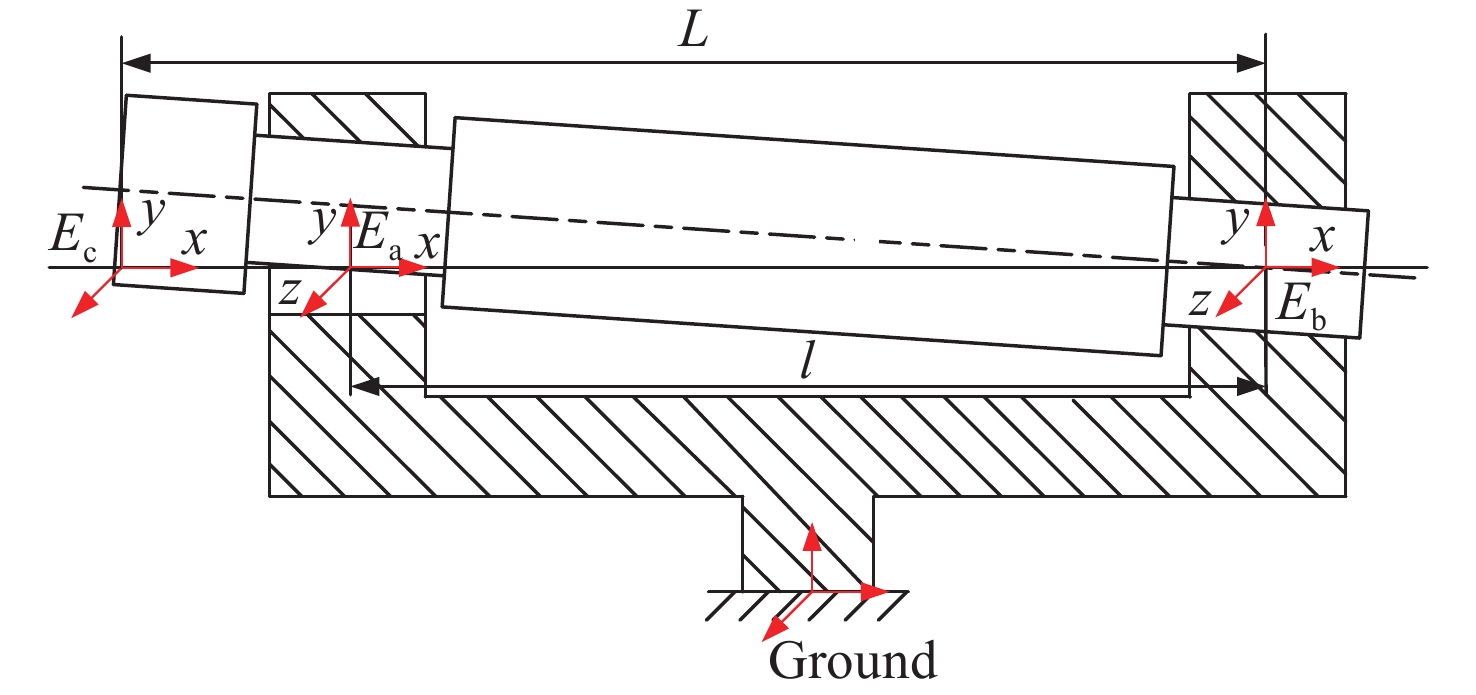
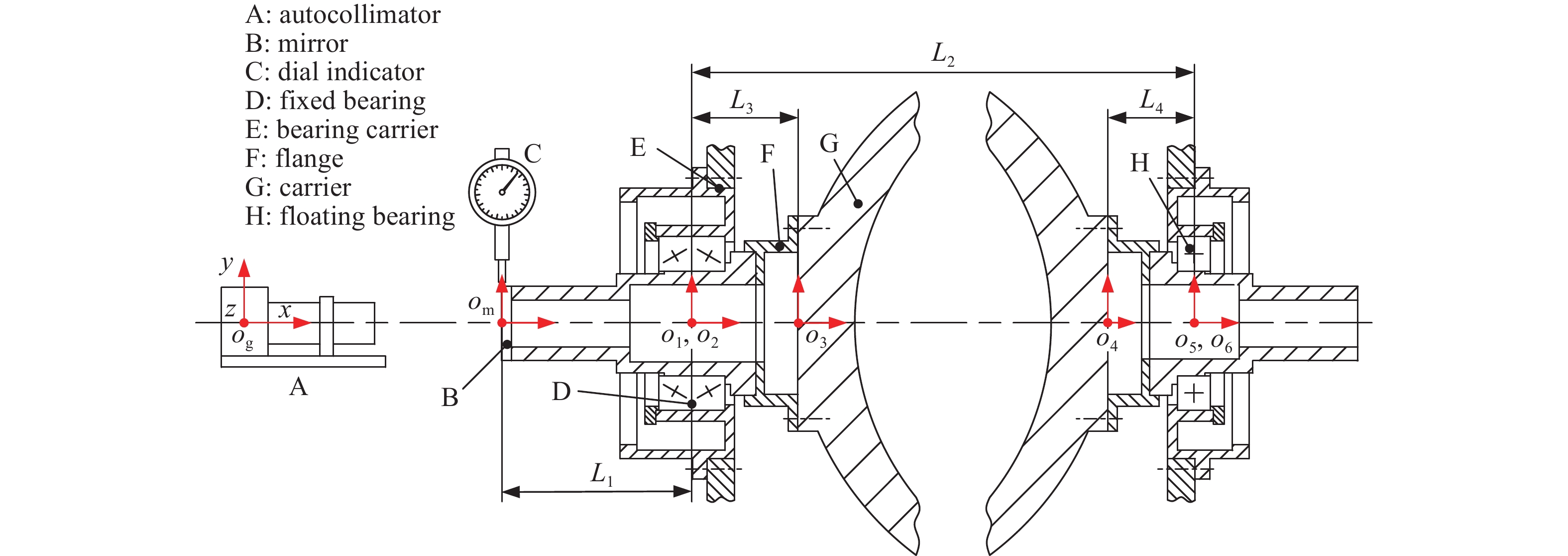
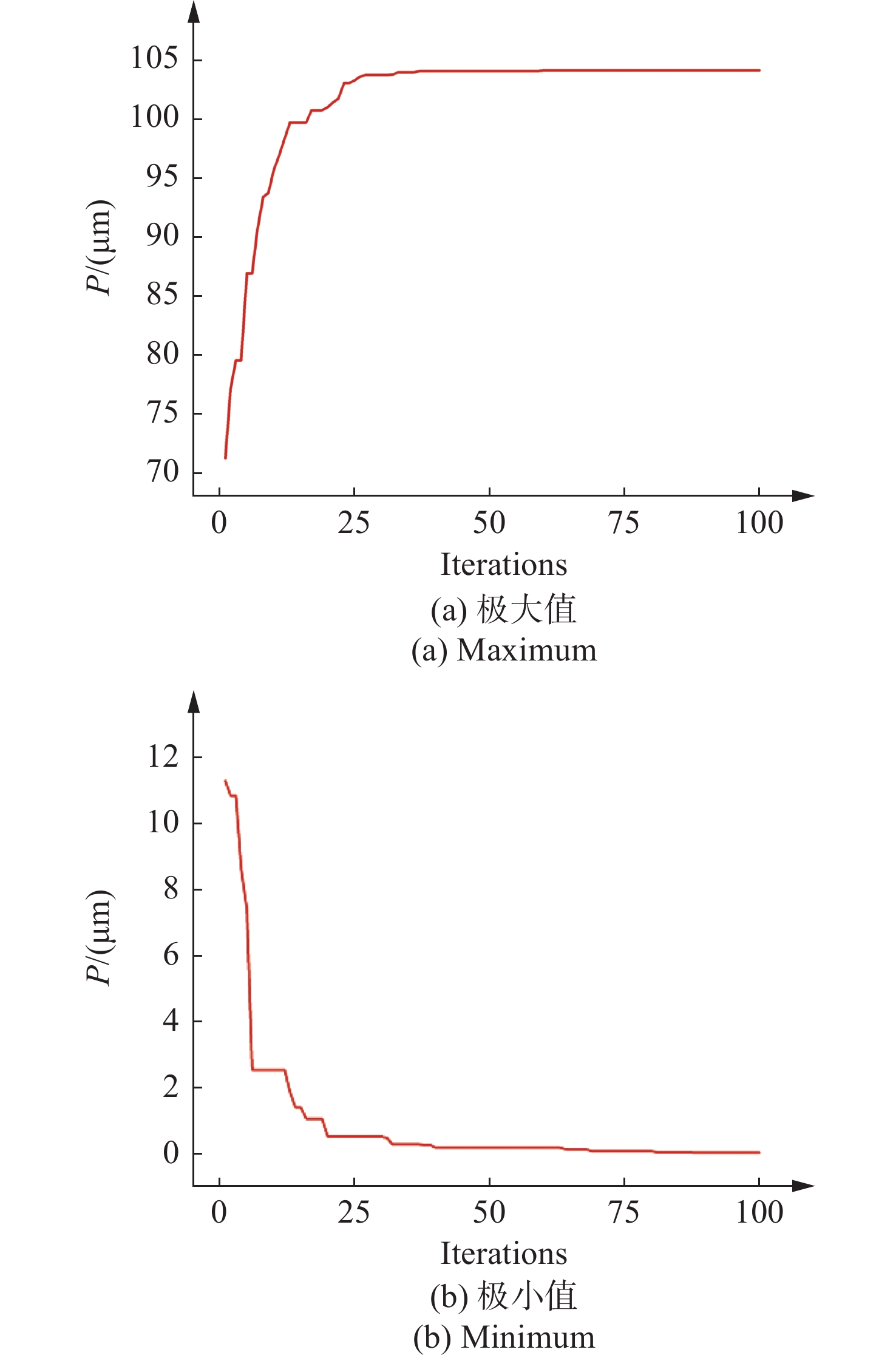
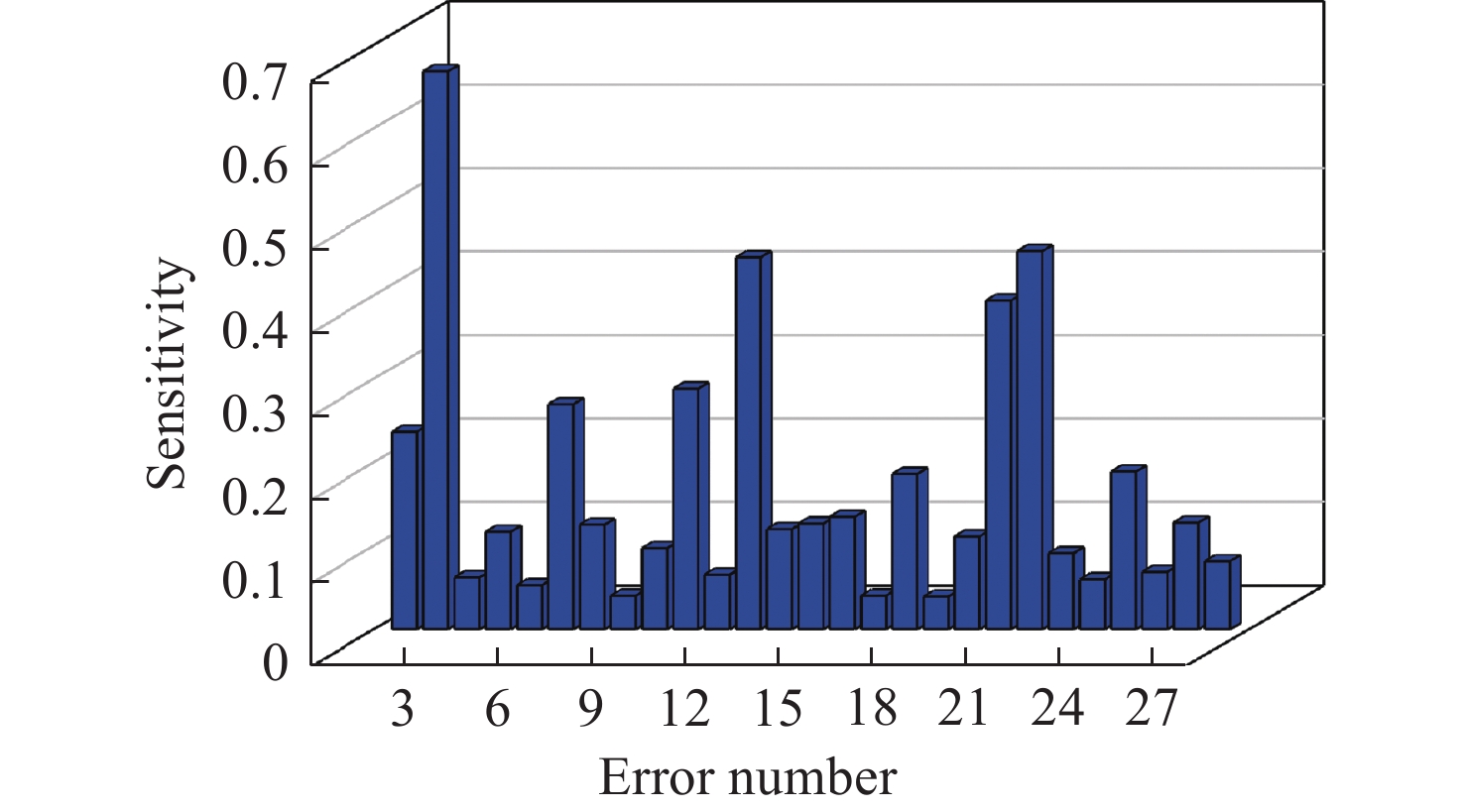
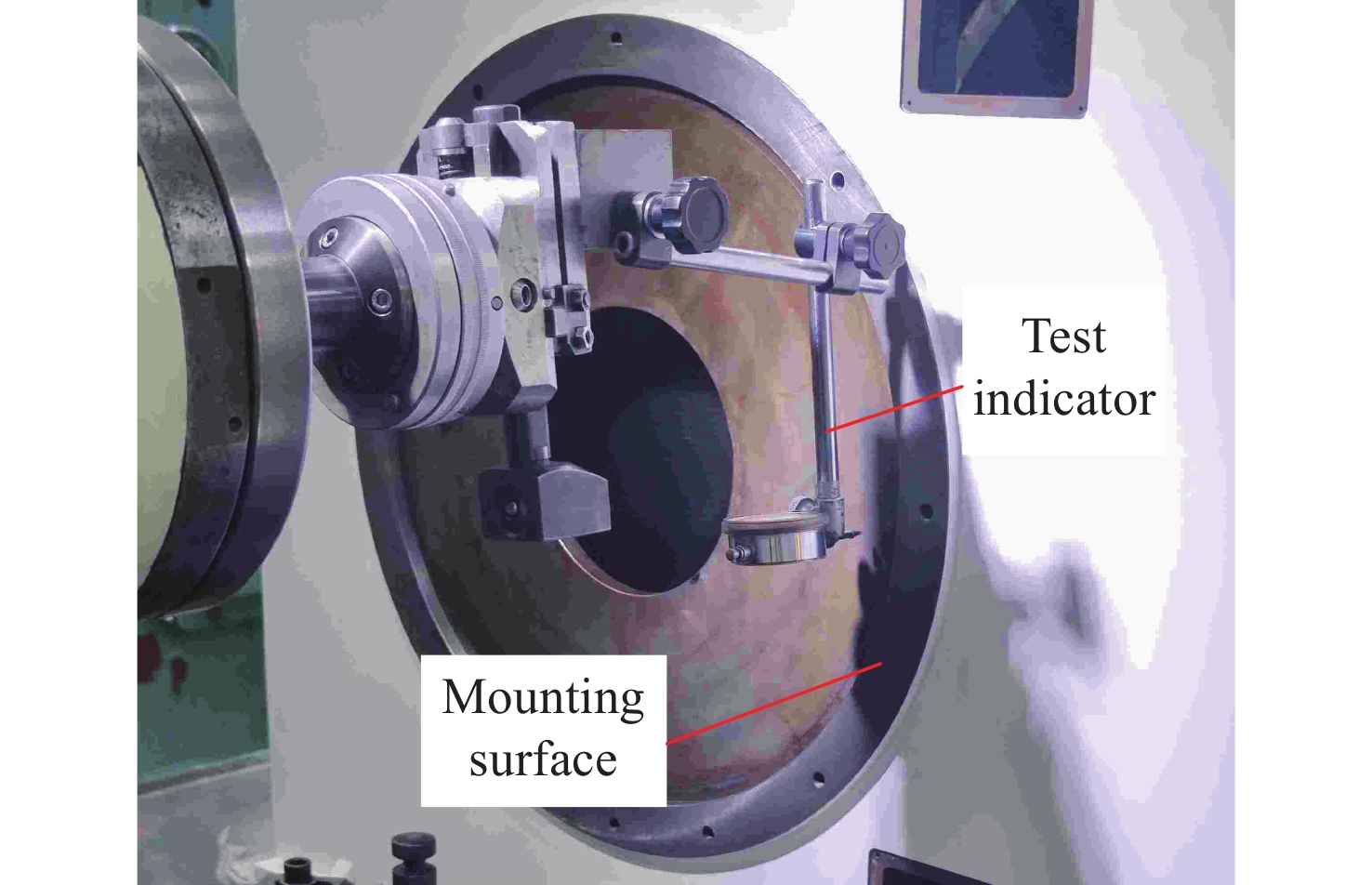
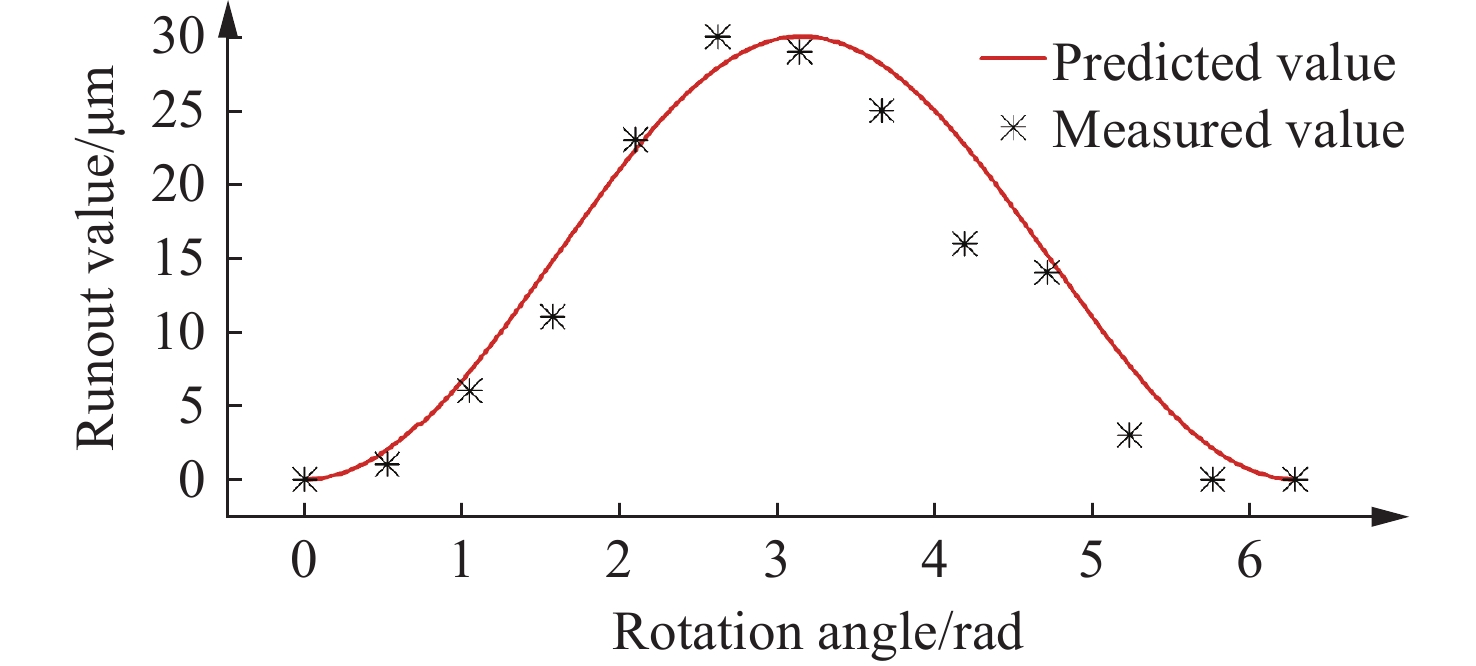
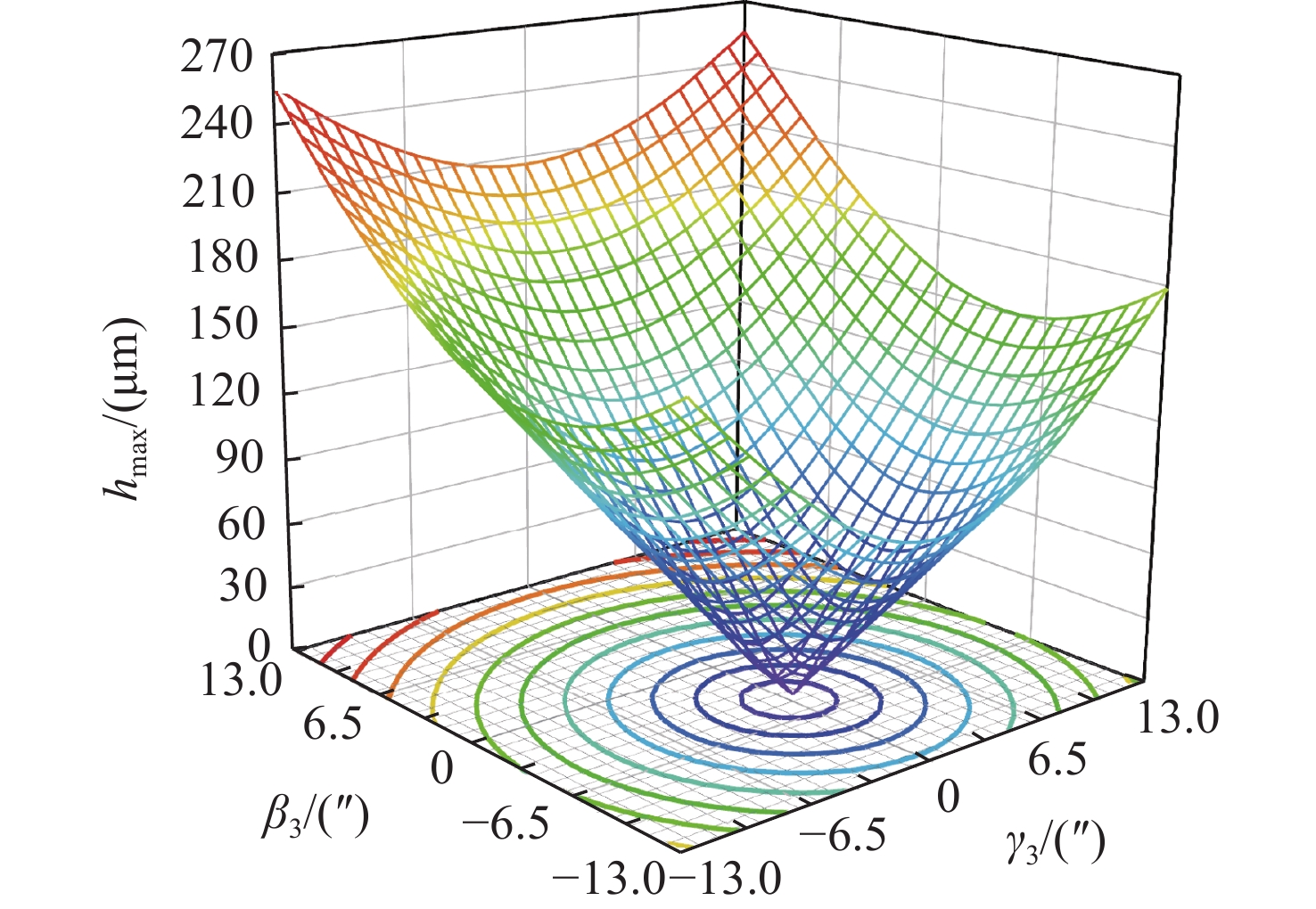
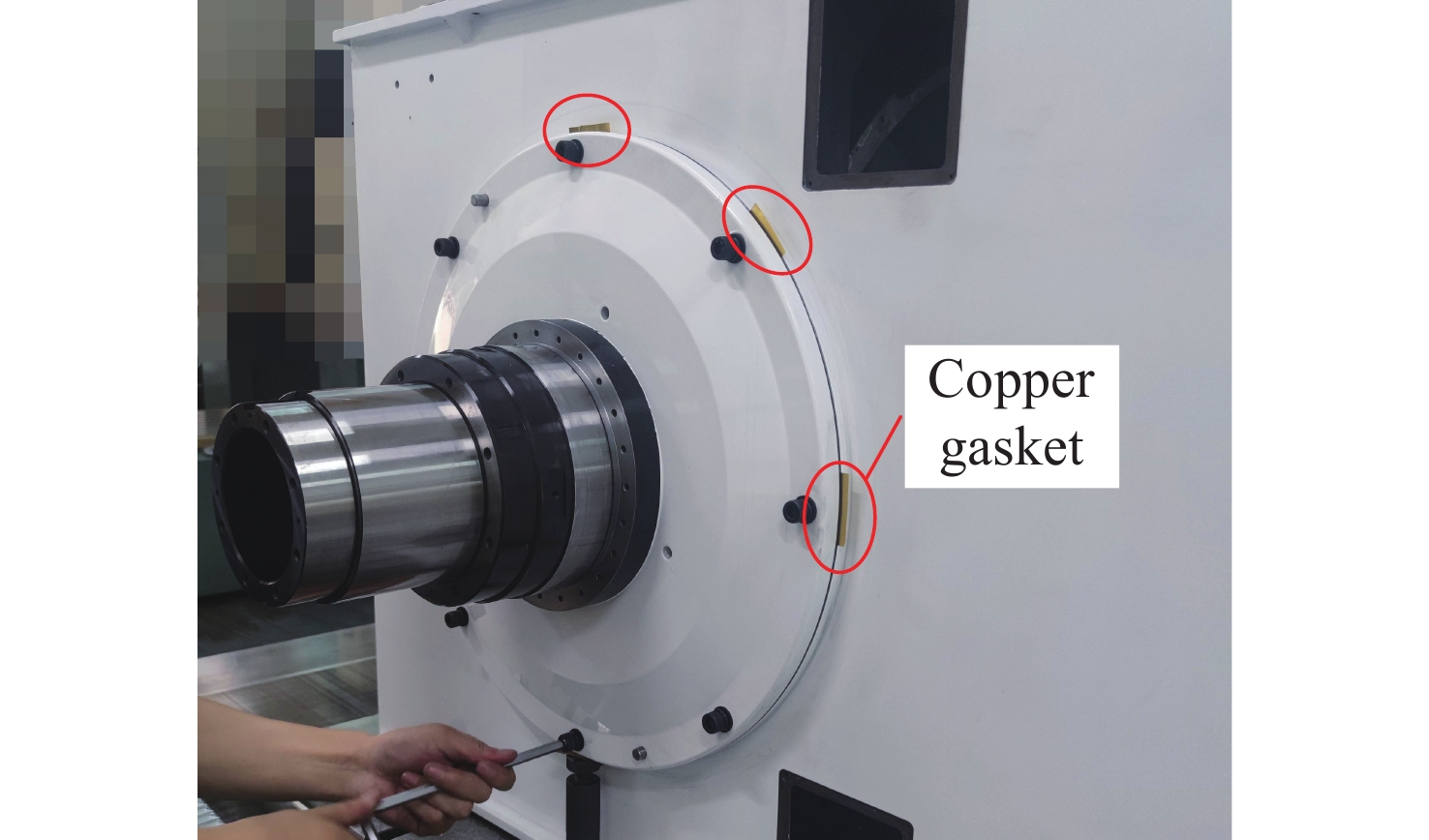
为提高光电经纬仪等二维转台的轴系运动精度,本文基于雅可比旋量理论建立了一种可考虑零件结构误差及其耦合放大效应的数学模型。针对“一端固定、一端游动”的轴系结构,提出了局部并联结构的分析方法。通过数值仿真分析,获得了各零件结构误差对轴系运动精度的影响以及最优的轴系装配方案。光学口径为650 mm的光电经纬仪的装调结果表明:装配优化后的轴系运动精度较优化前提高了32.1%。所构造的轴系运动精度模型及优化方法为指导光电经纬仪等二维转台的轴系装调以及公差设计提供了一定的理论根据。
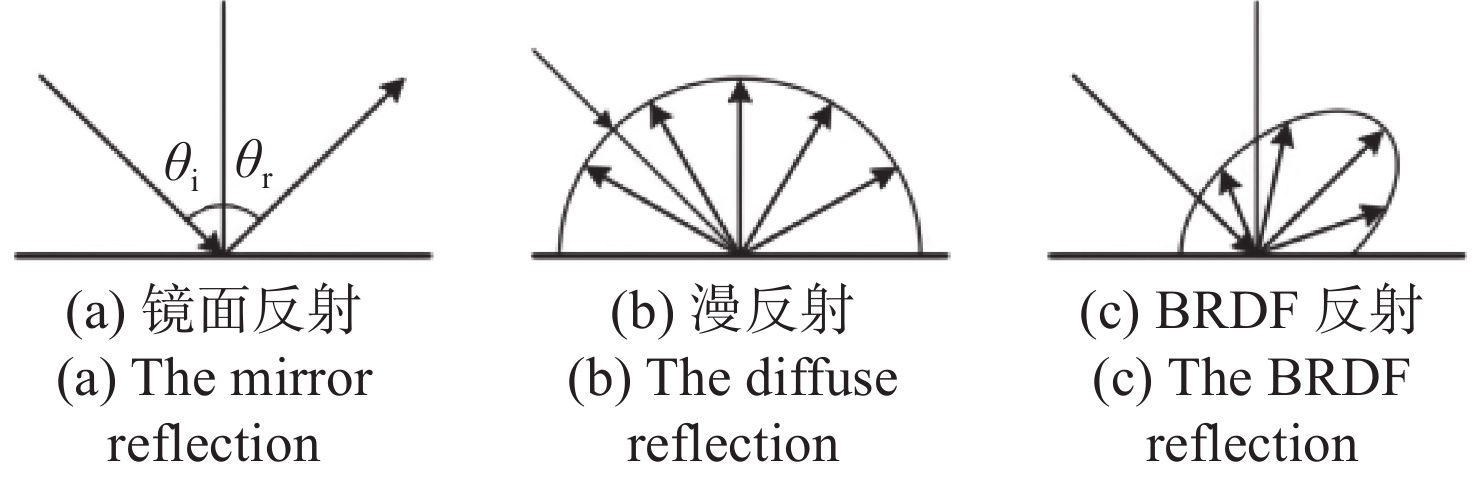
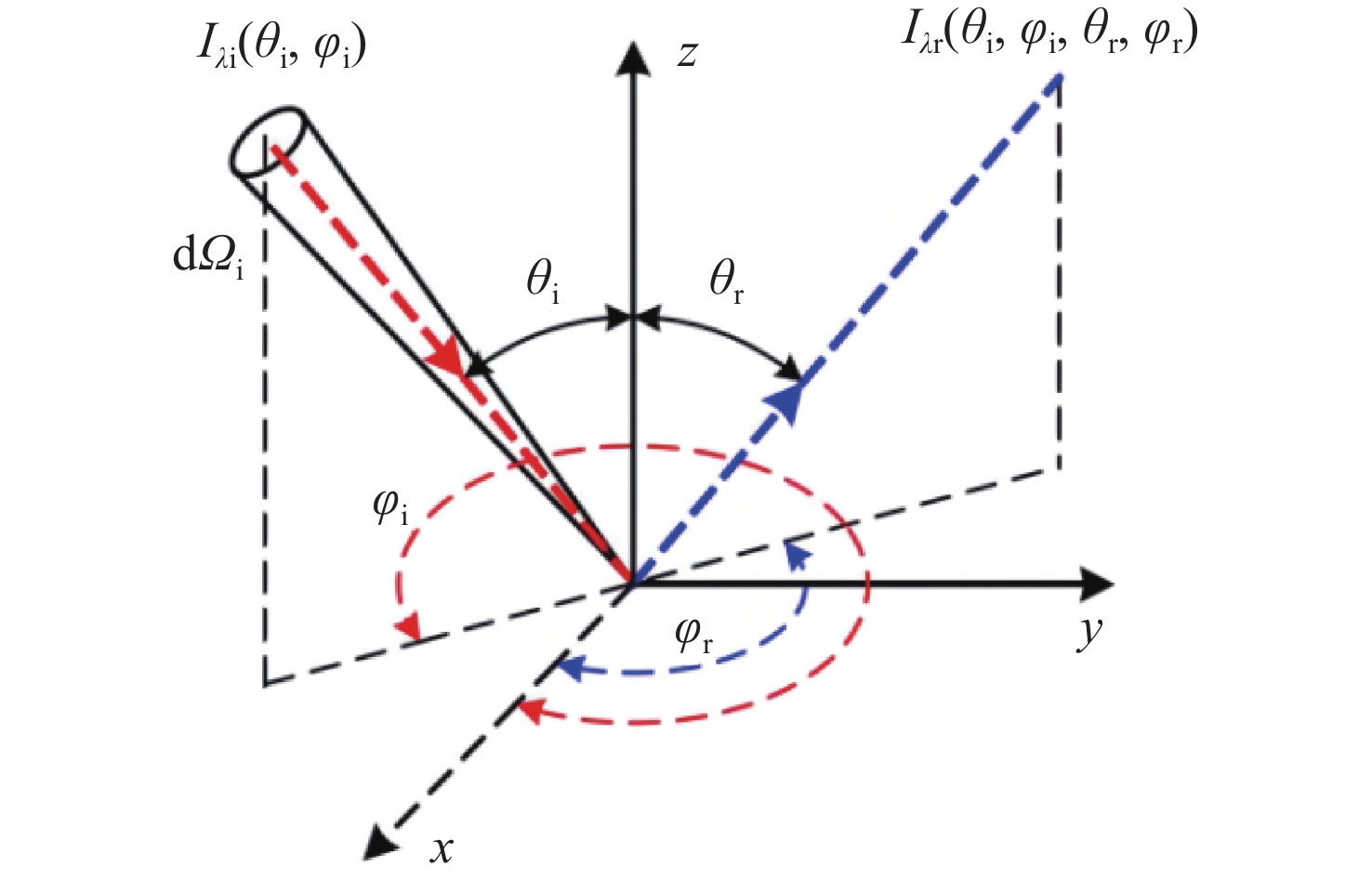
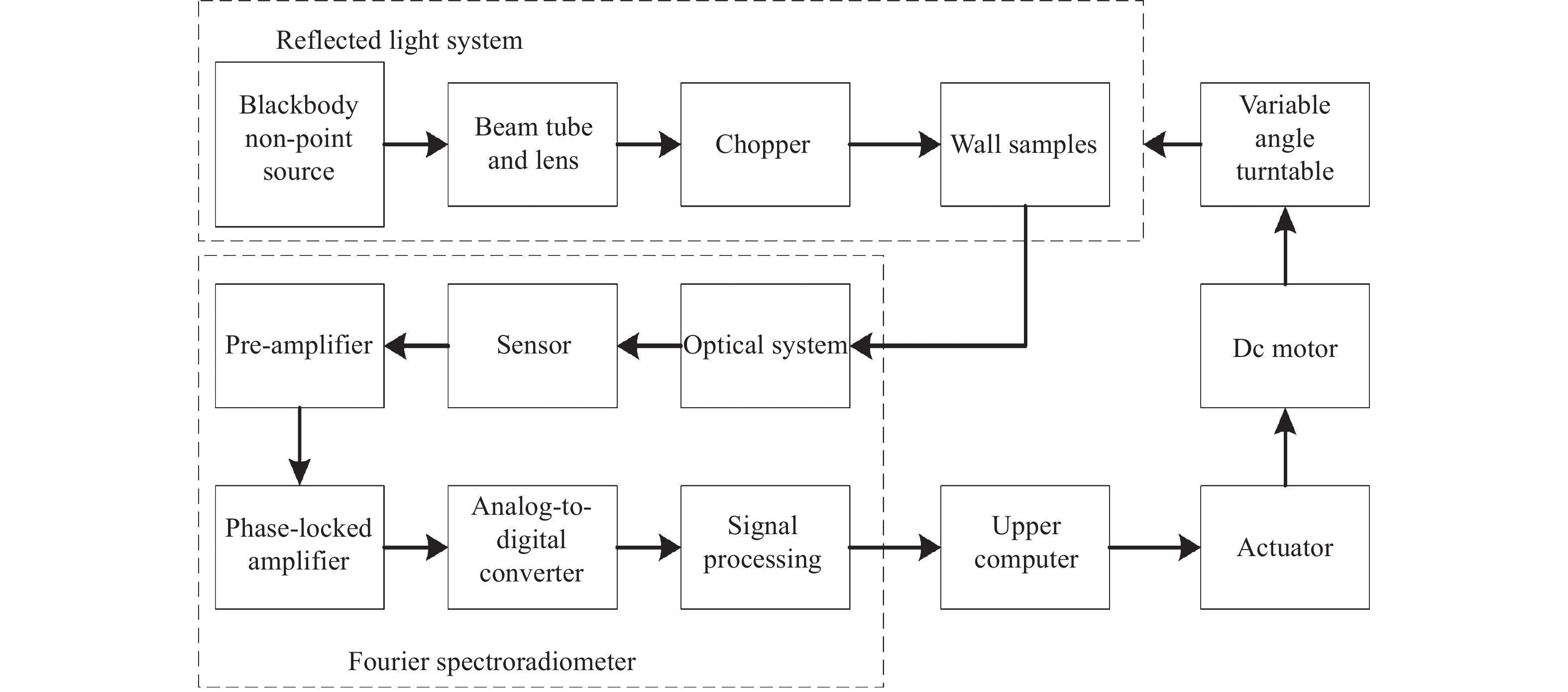
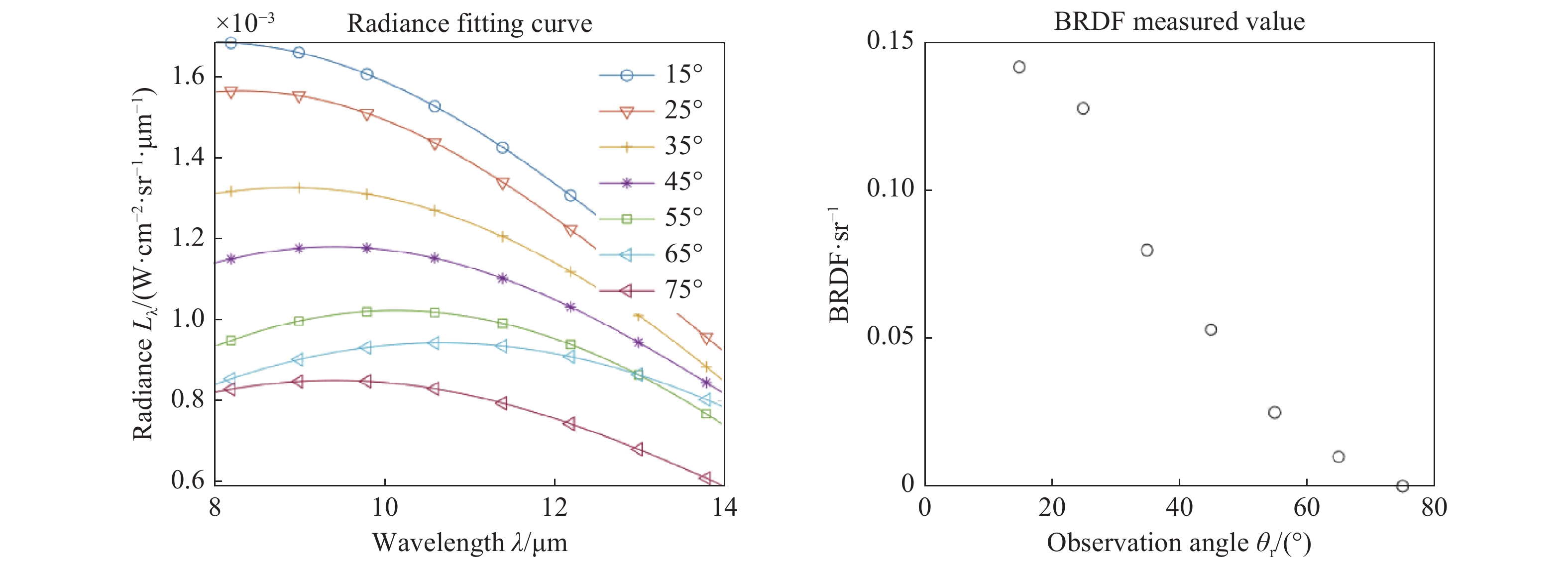
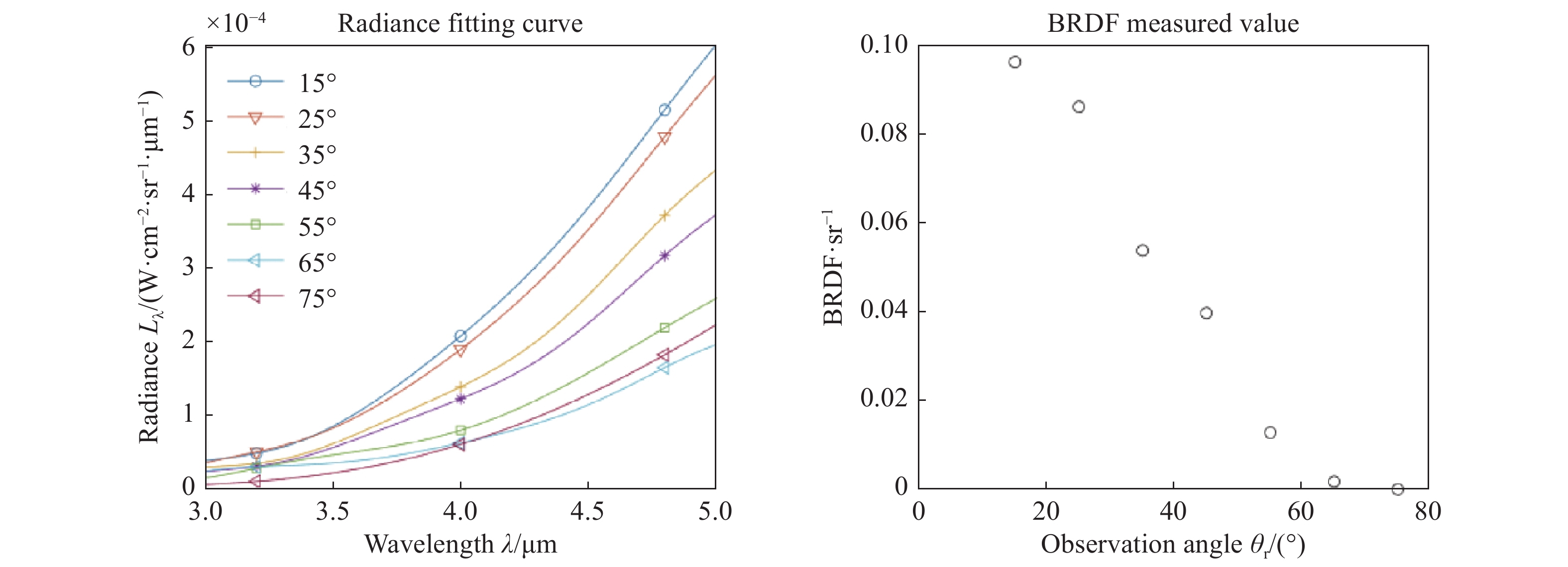
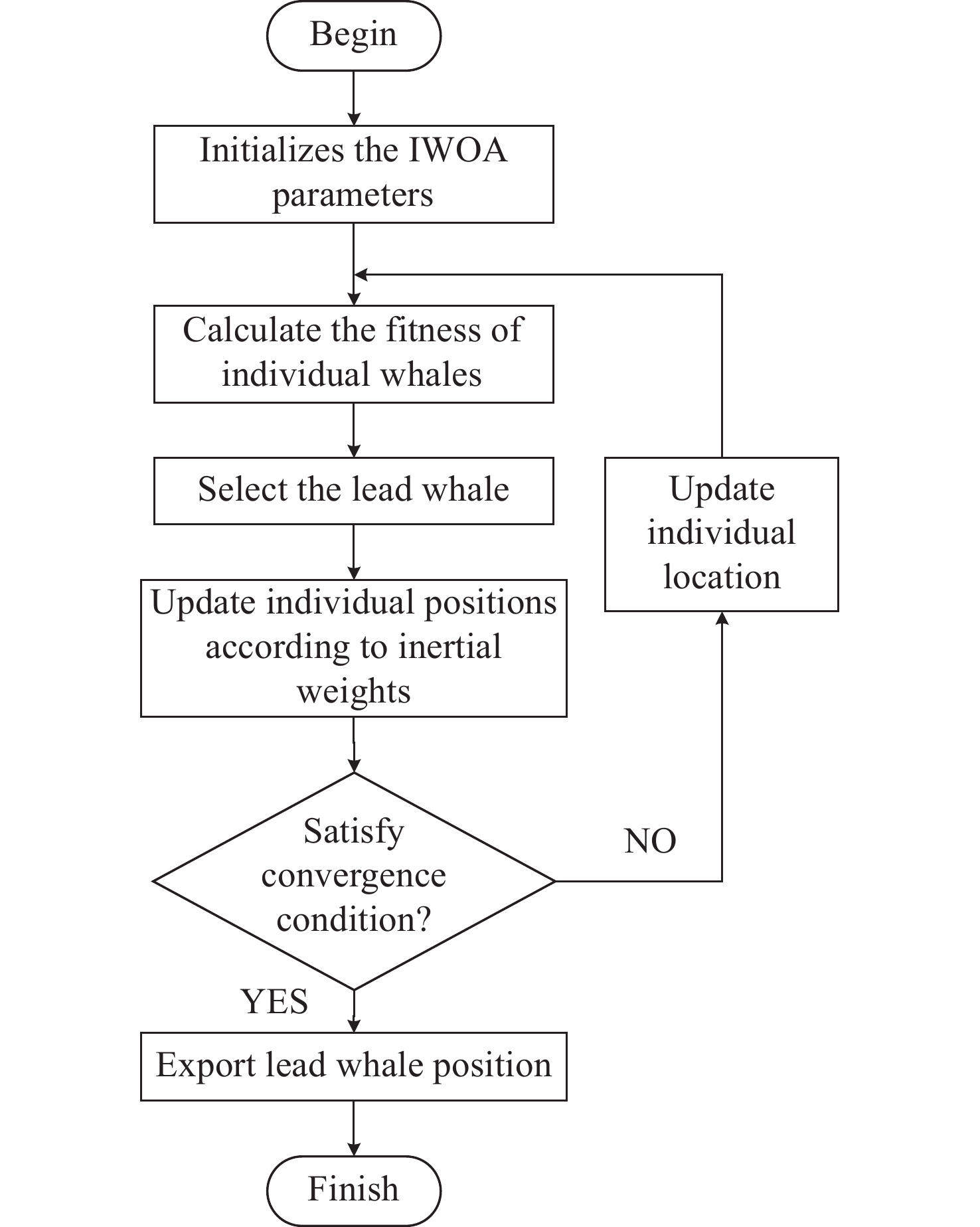
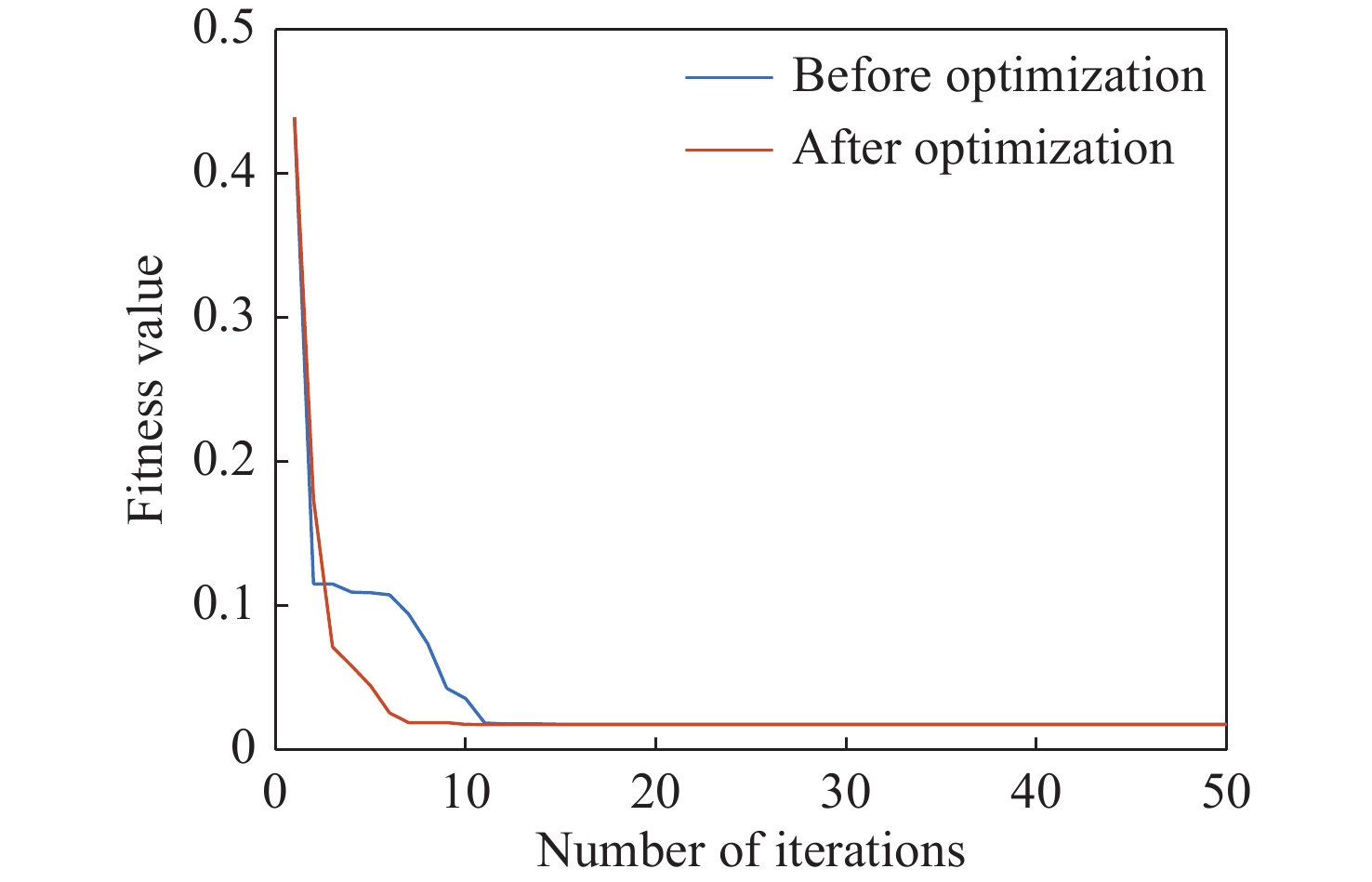
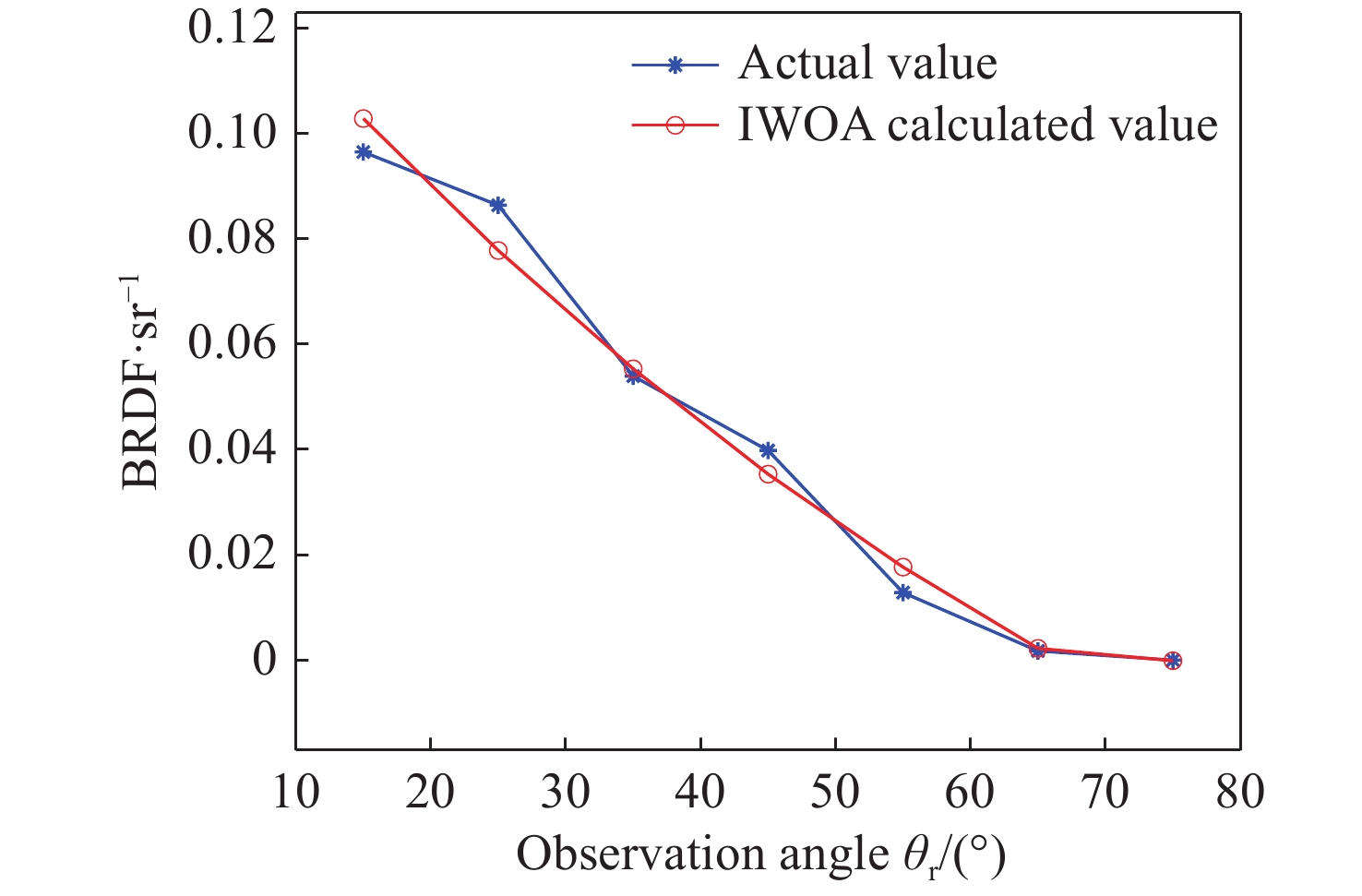
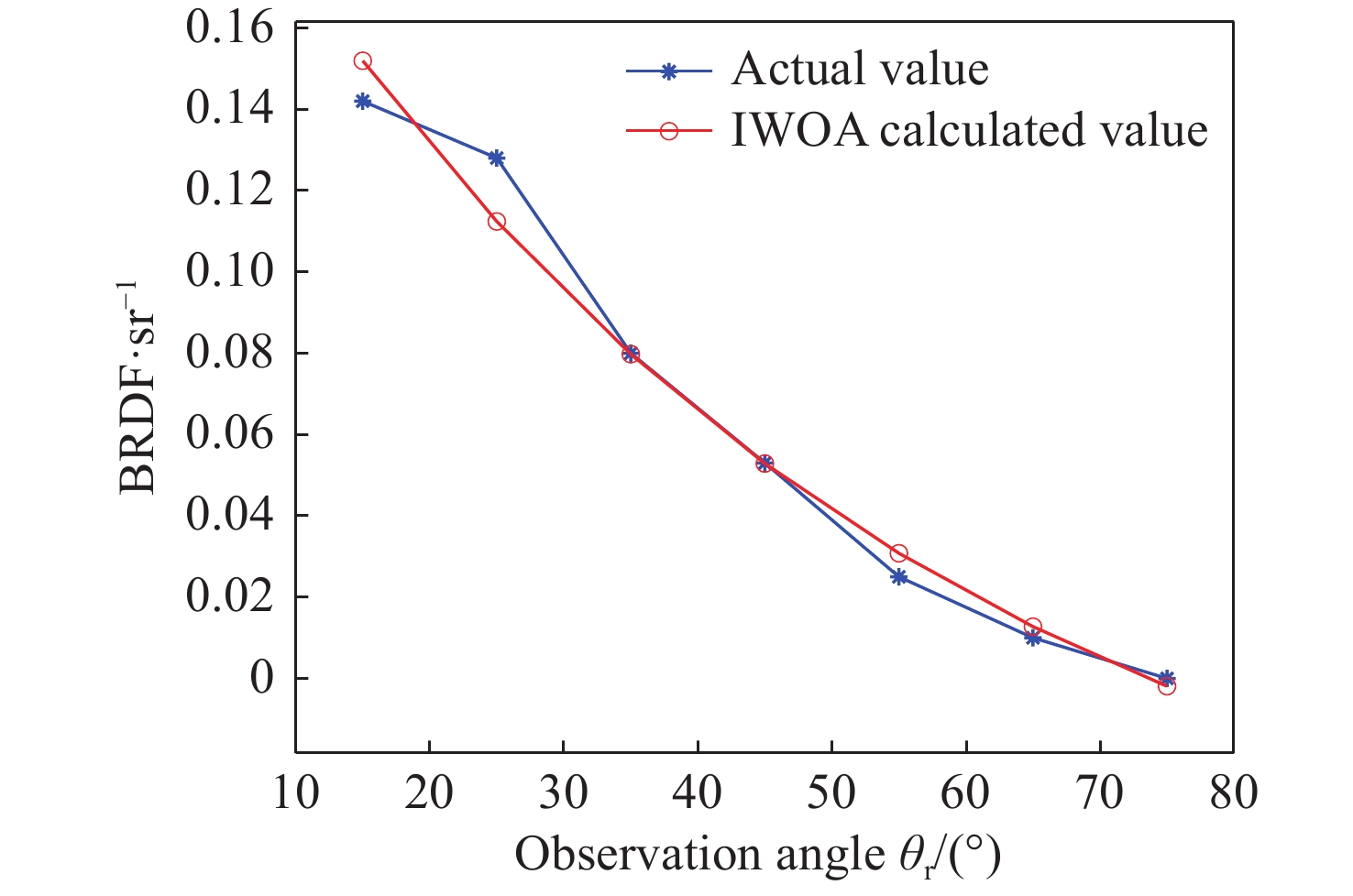
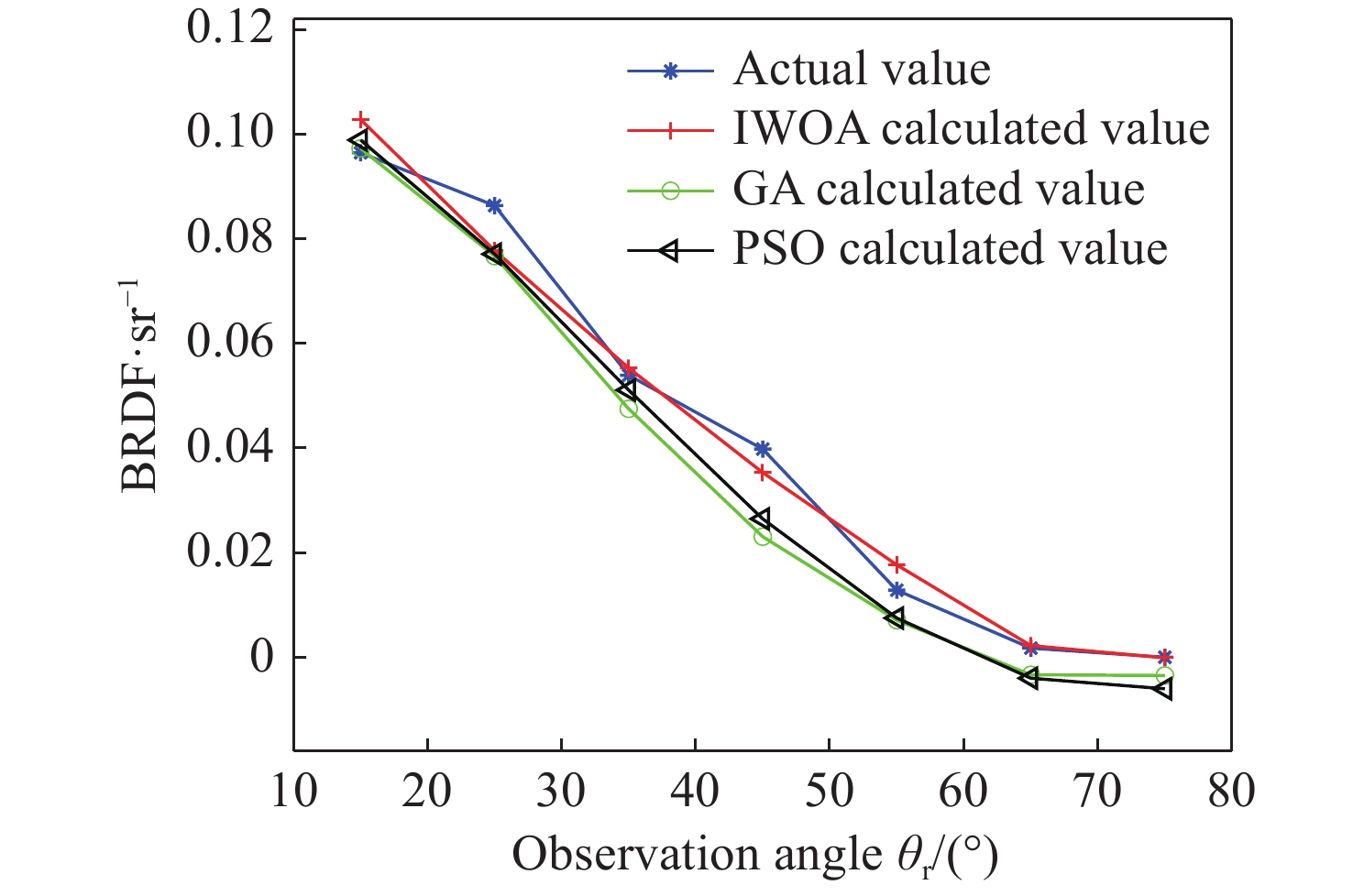
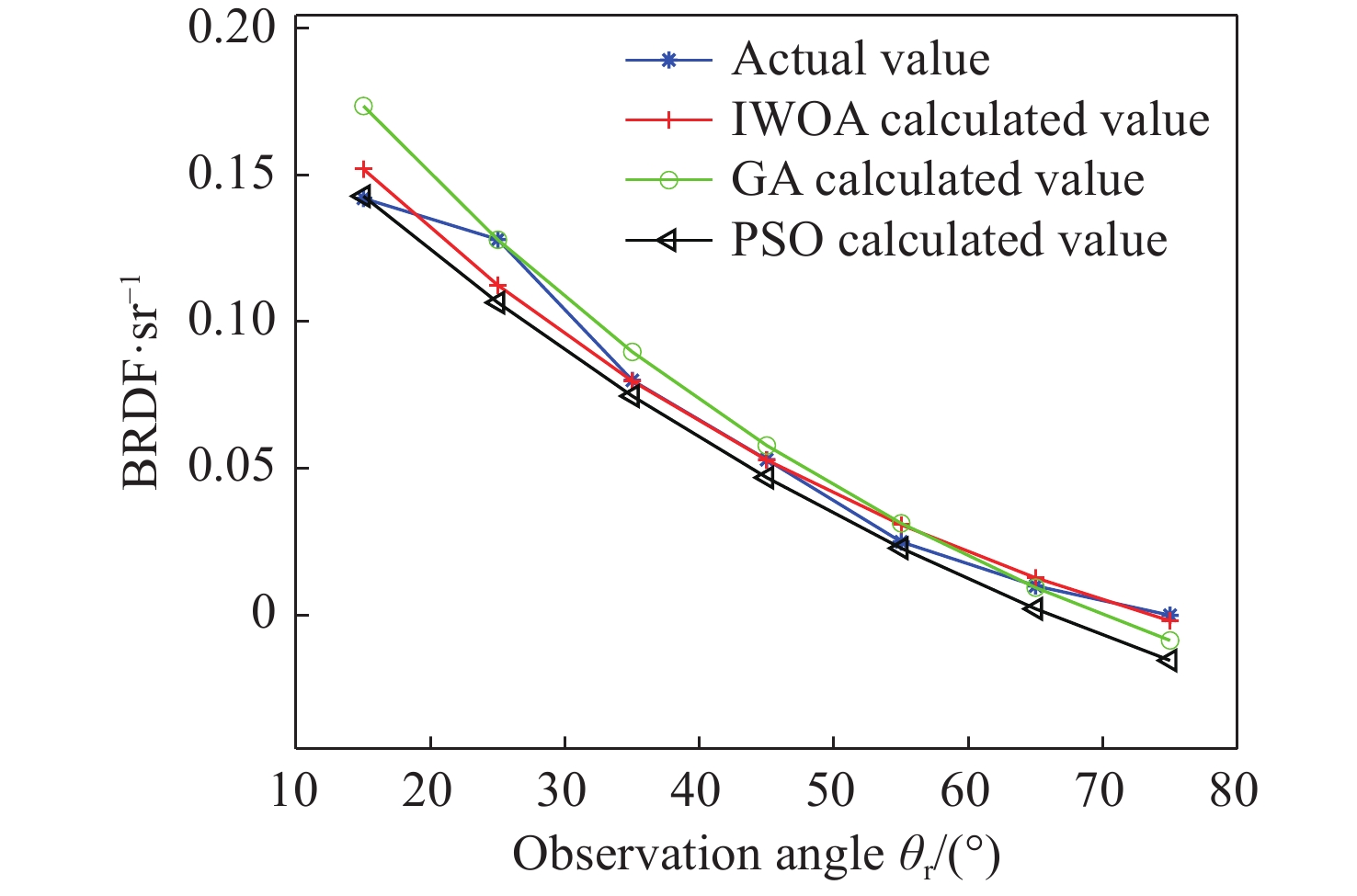
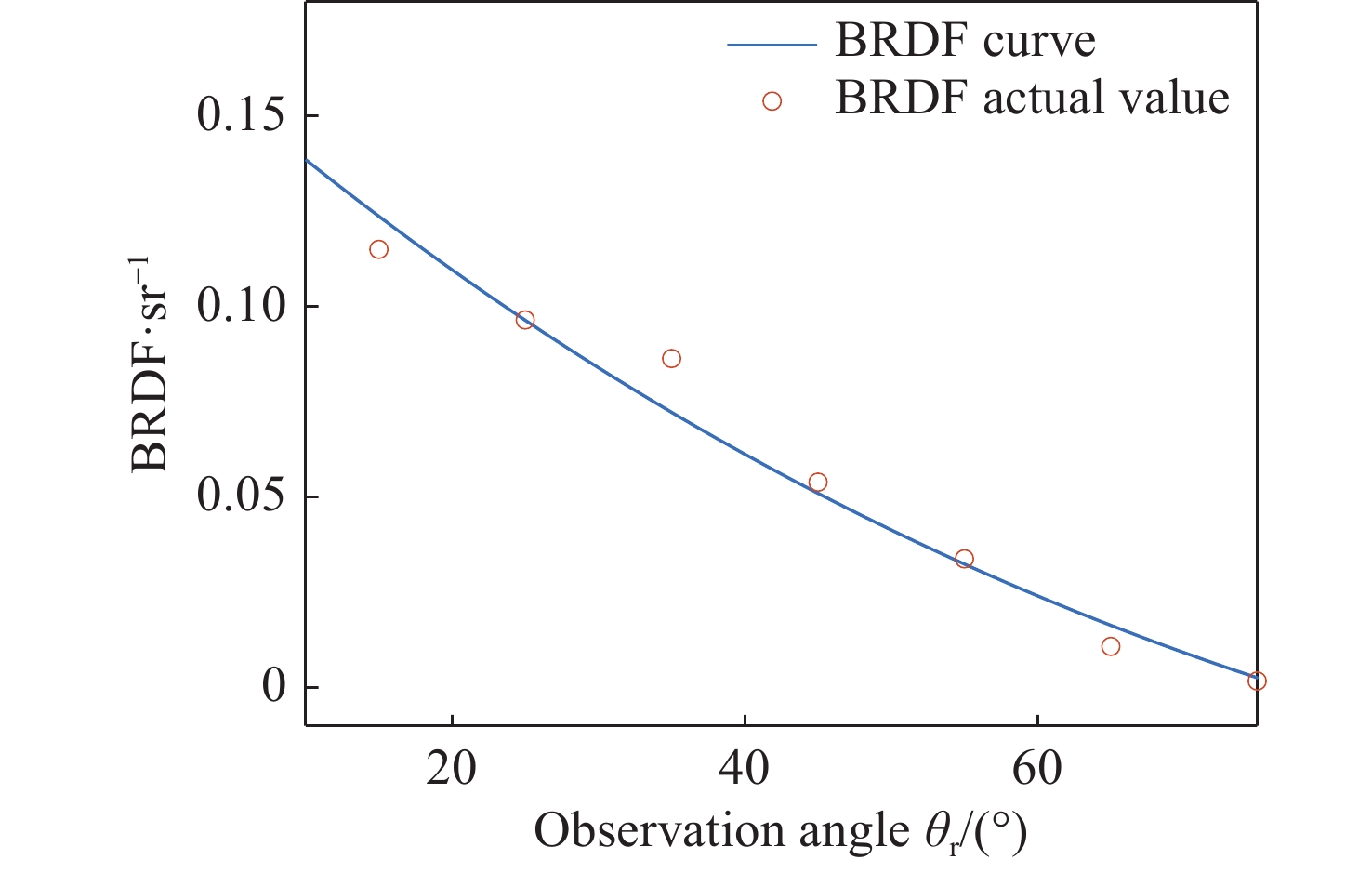
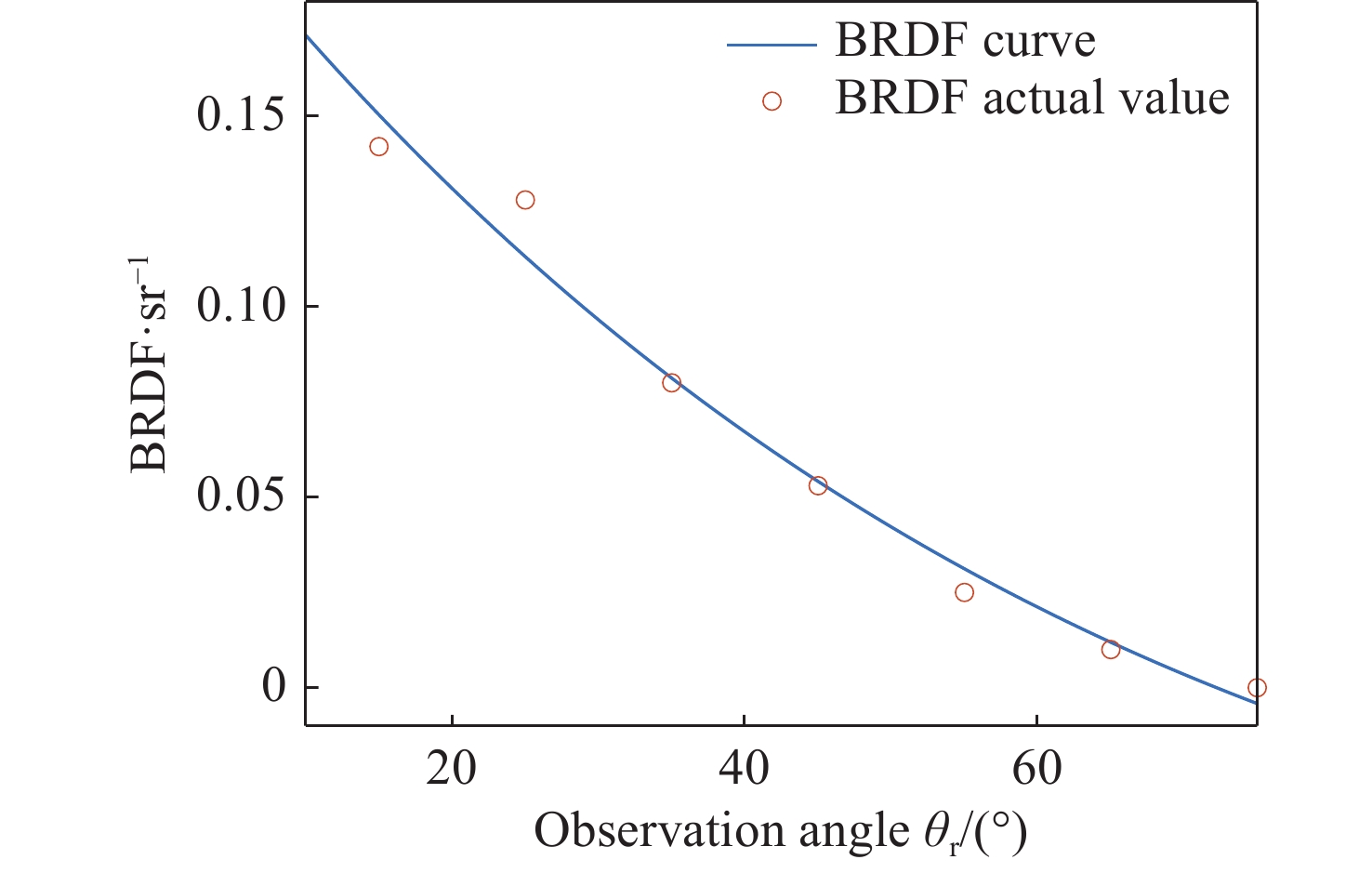
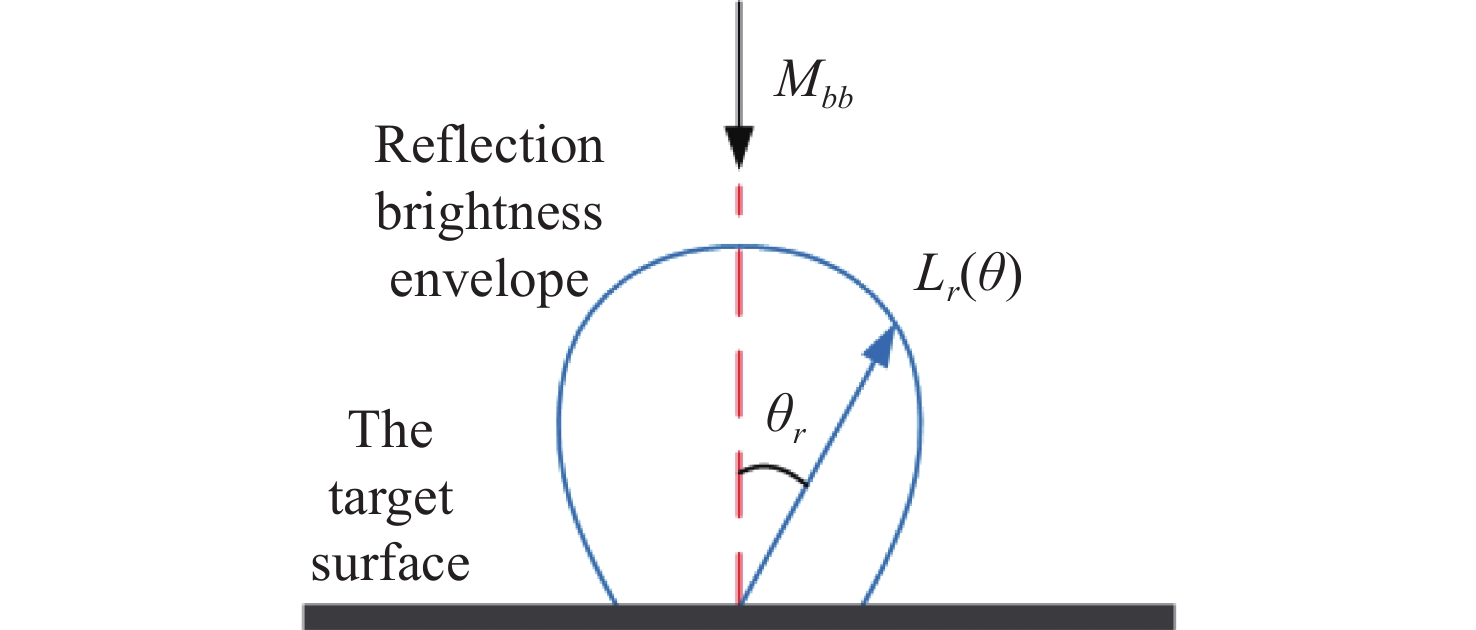
壁面的红外反射特性由双向反射分布函数(BRDF)表征和求解。目前BRDF测量需要大量实验数据,同时存在精度不高的问题。通过构建壁面反射特性测试平台,使用MR170型傅立叶红外光谱辐射计获取2~15 μm波段下入射角度和各个反射角度的目标辐射亮度。针对隐身目标,应用RBF网络对3~5 μm以及8~14 μm波段的辐射亮度曲线进行拟合,排除大气干扰,进而求解出上述两个波段隐身目标的BRDF值。为了解决BRDF模型精度不高的问题,提出了改进的鲸鱼优化算法(IWOA),对BRDF模型参数进行反演,并设计了基于BRDF的反射率求解方法。IWOA对BRDF计算模型参数反演有良好的效果。根据反射法,应用所得到的BRDF数据求解得到的反射率为0.5496,相对误差为6.17%,满足工程需求。
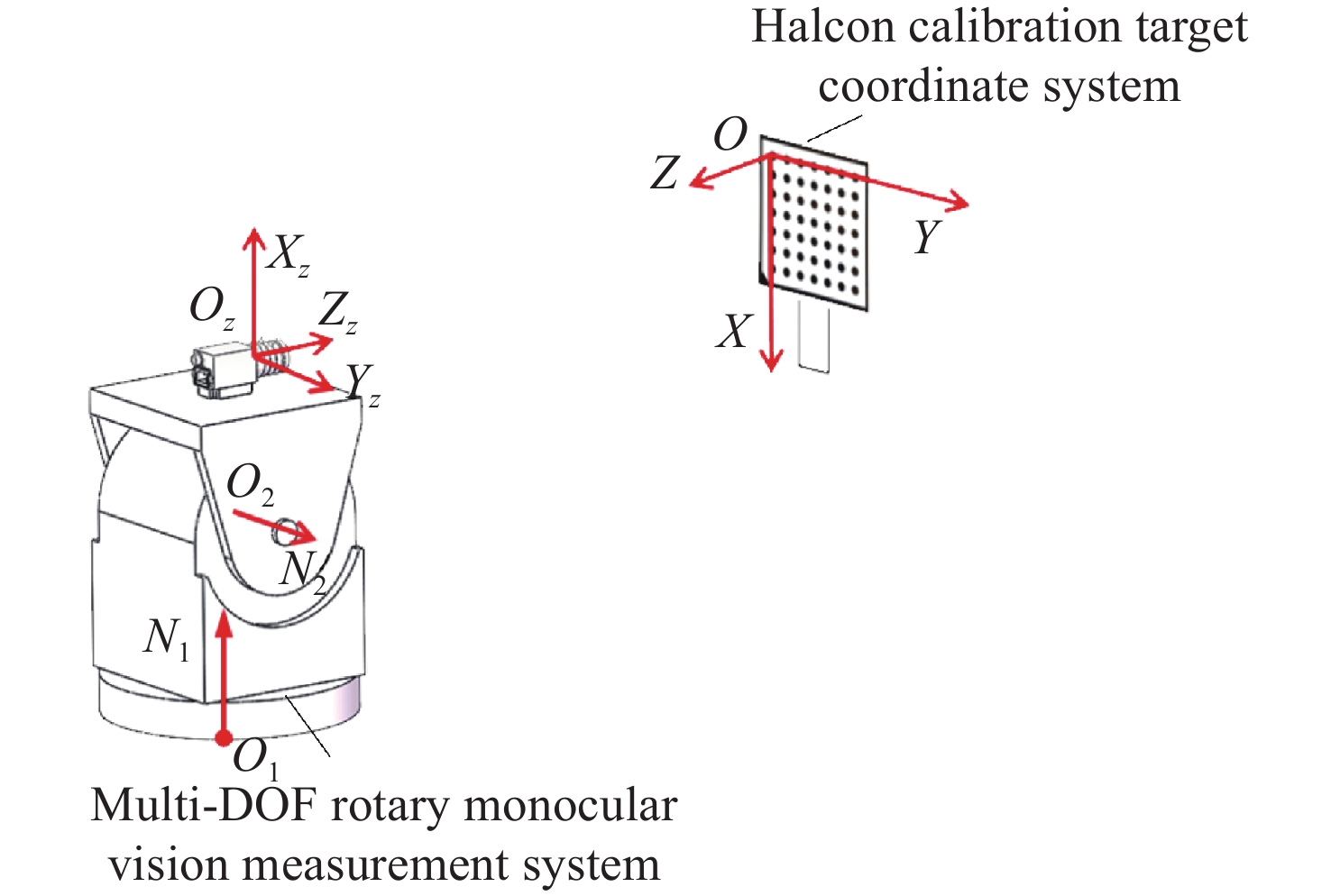
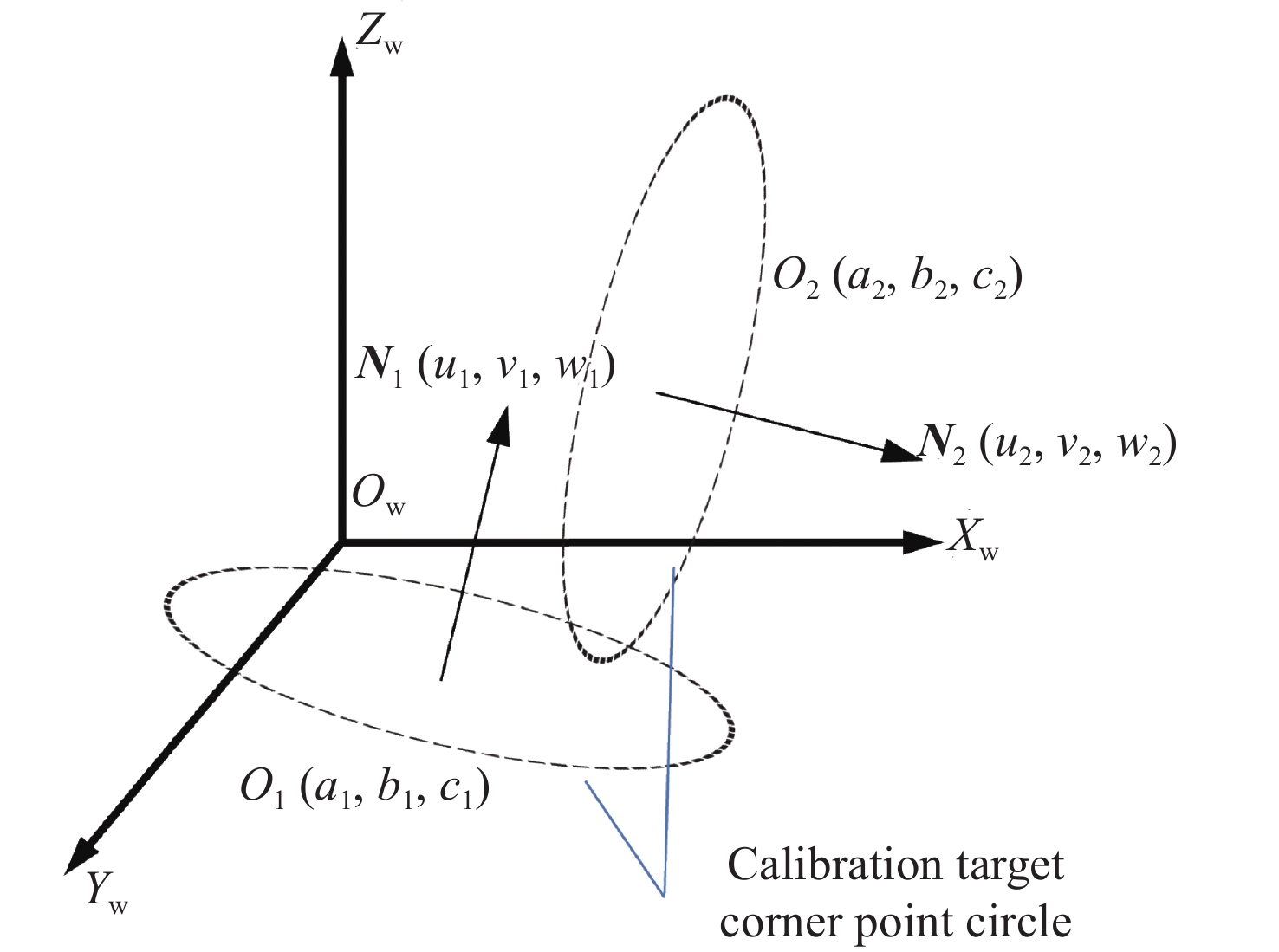
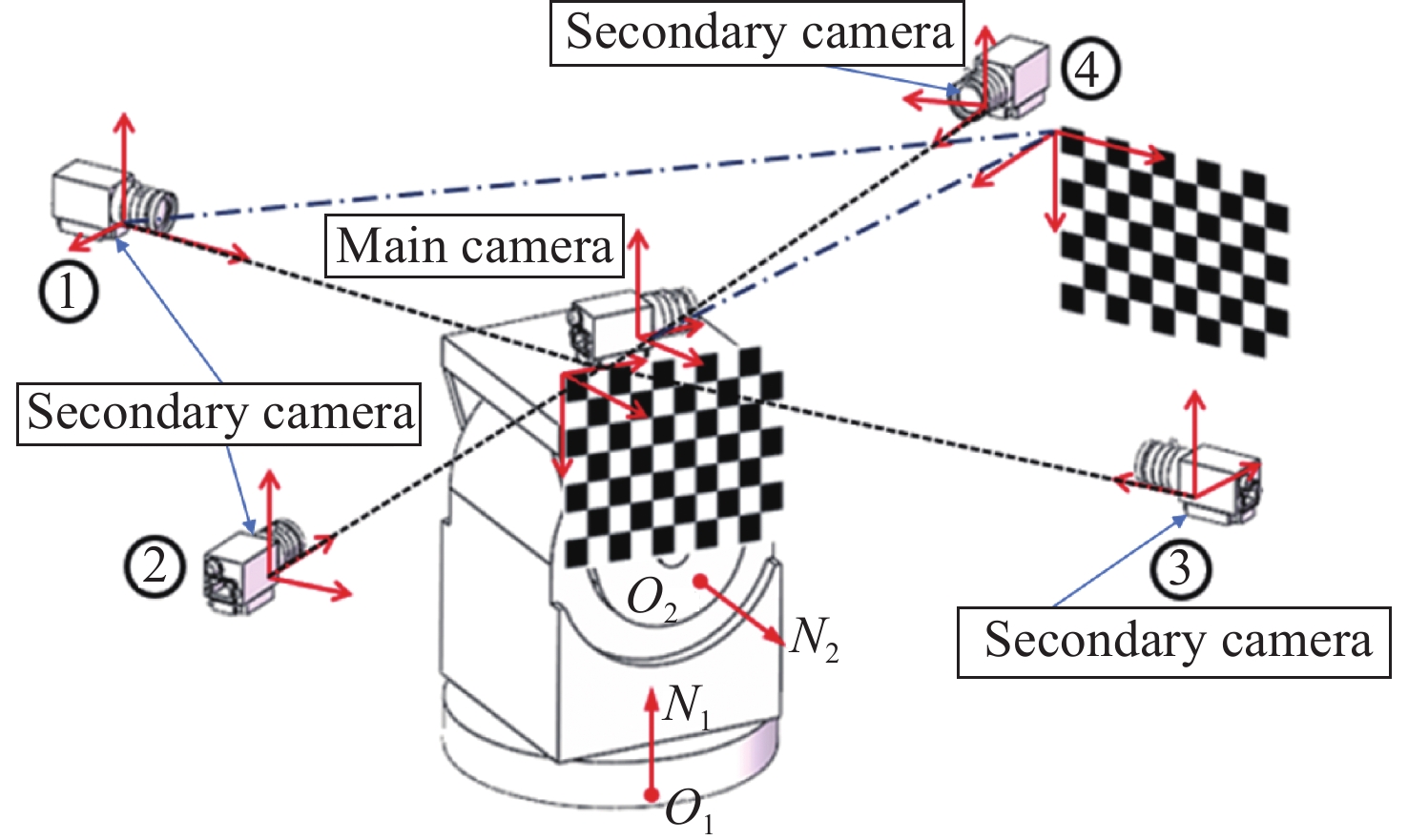
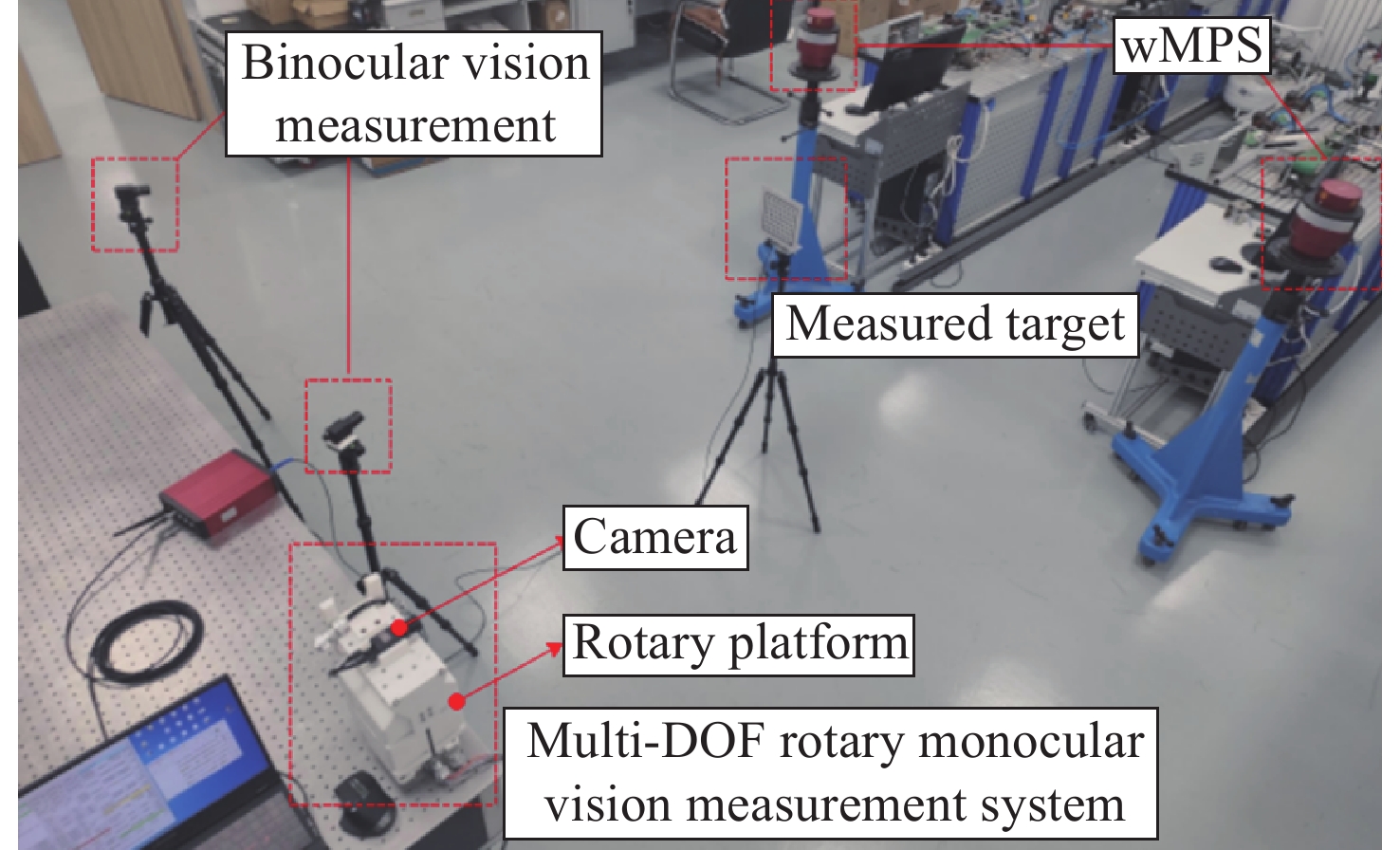
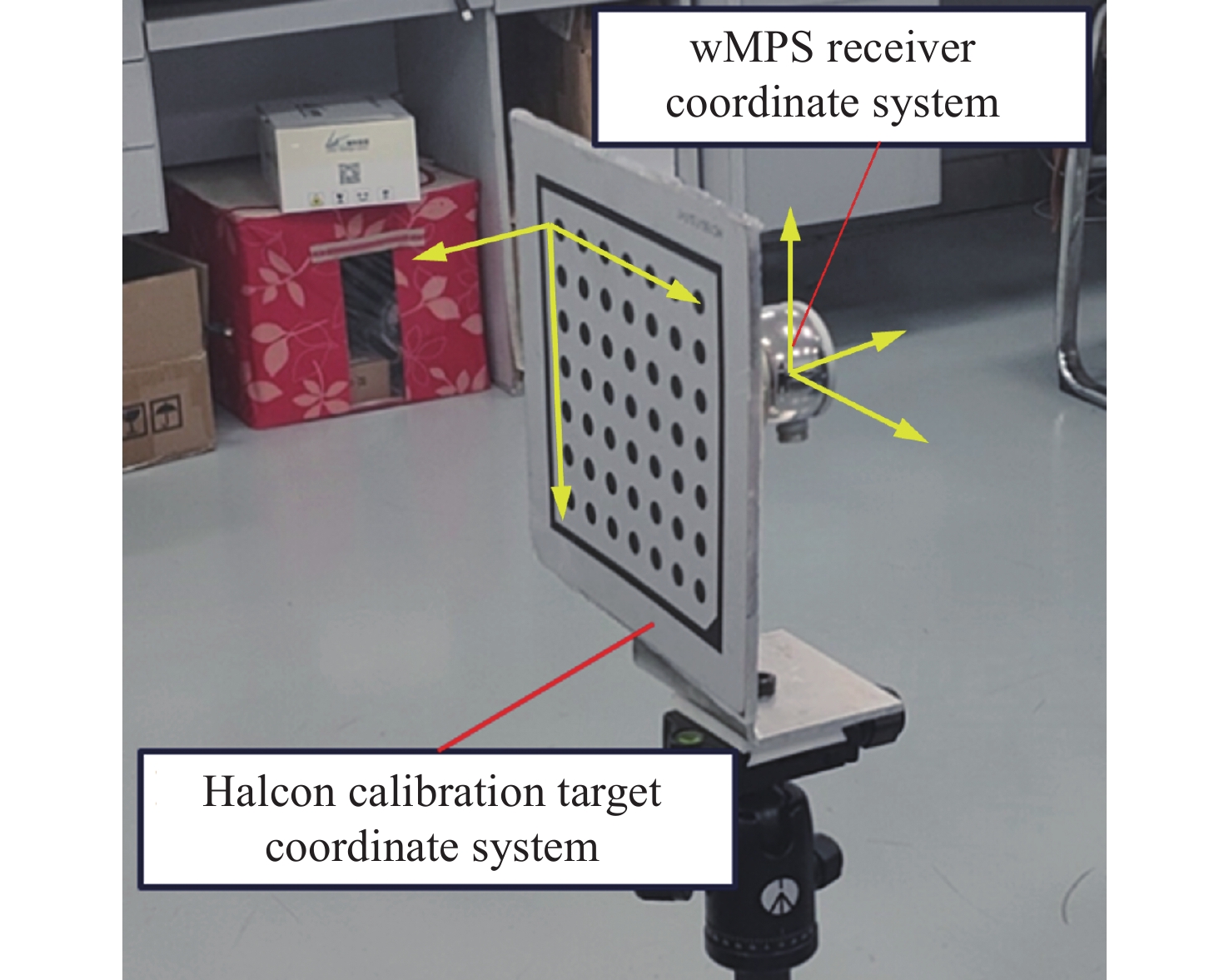
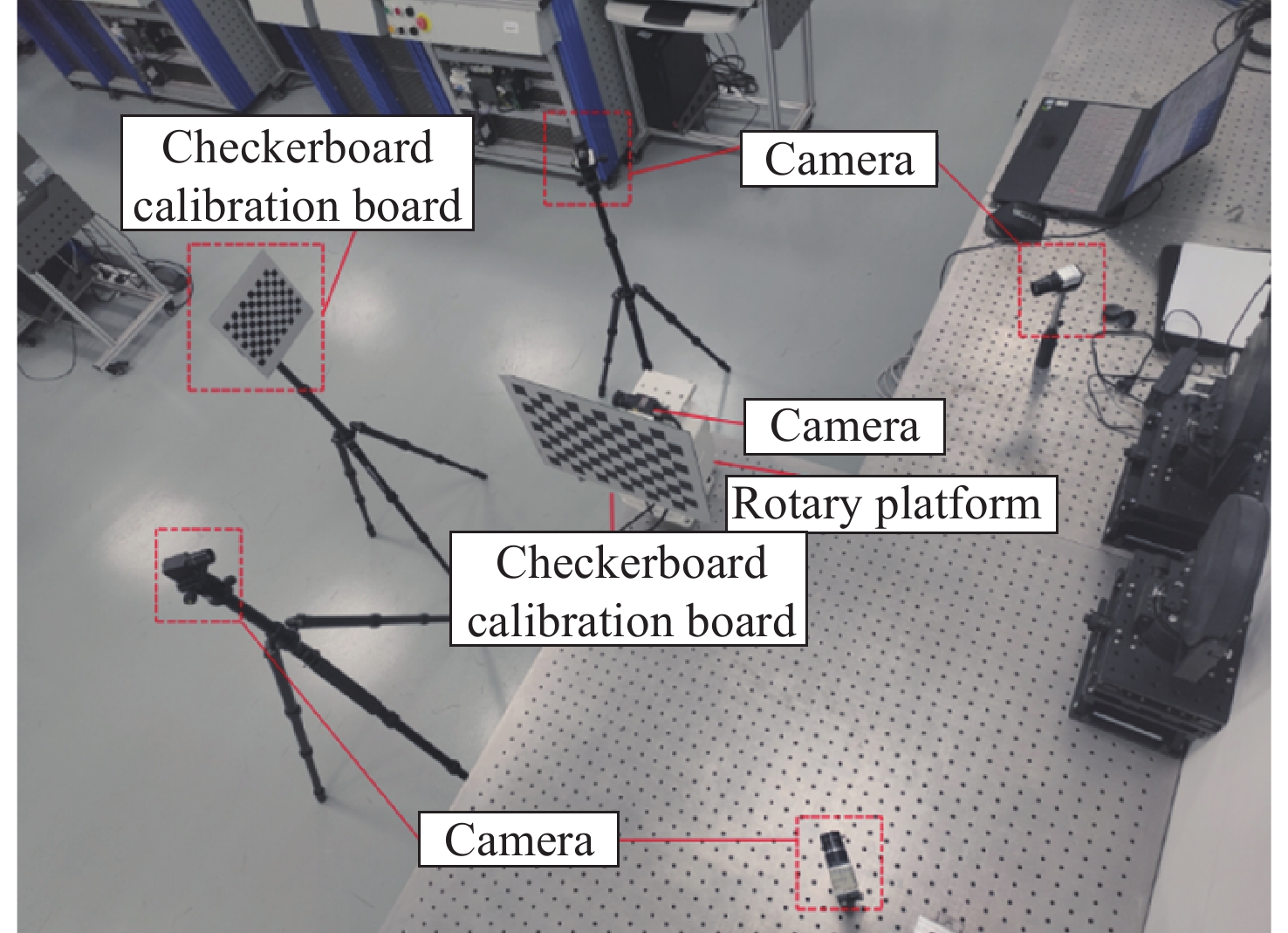
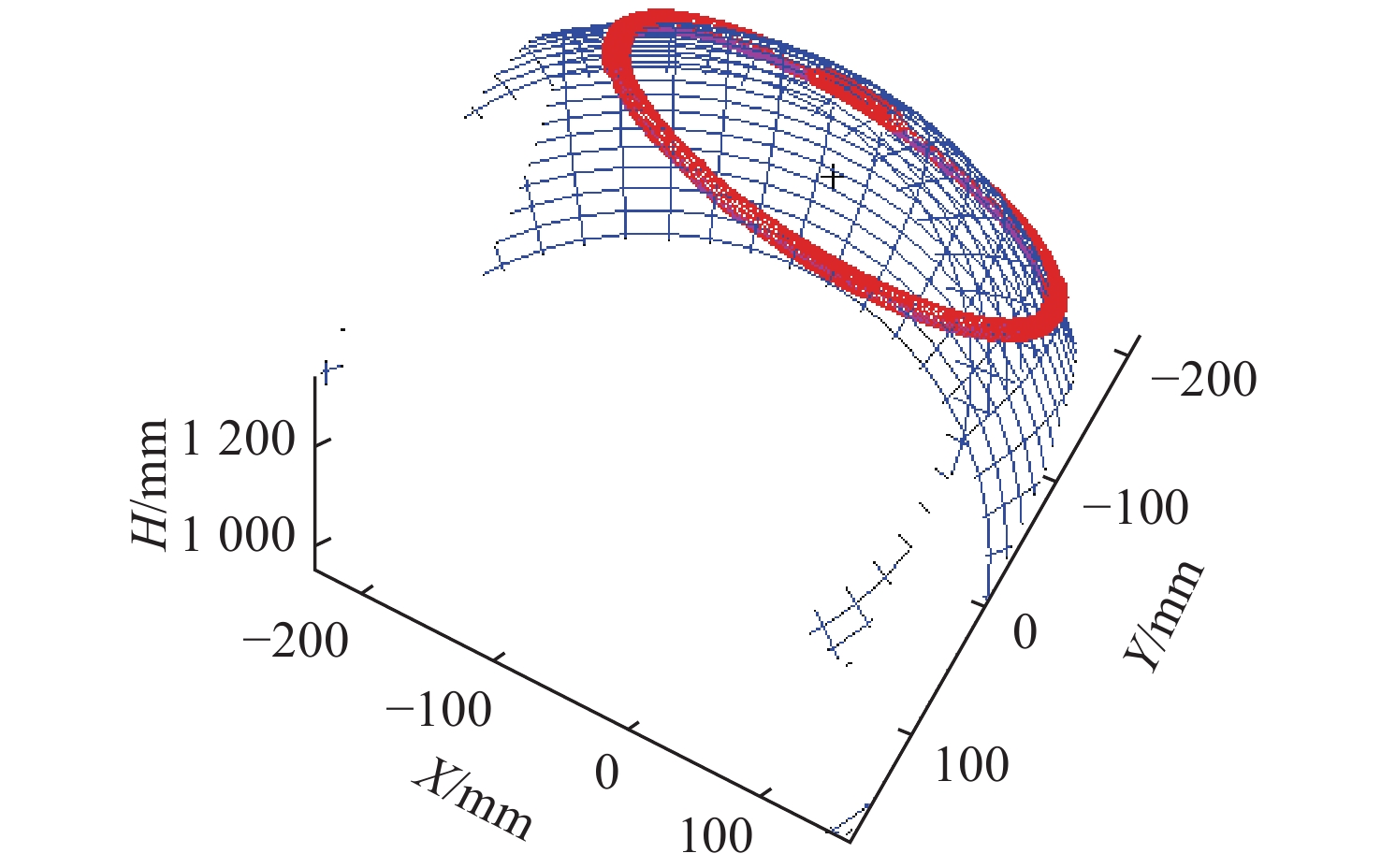
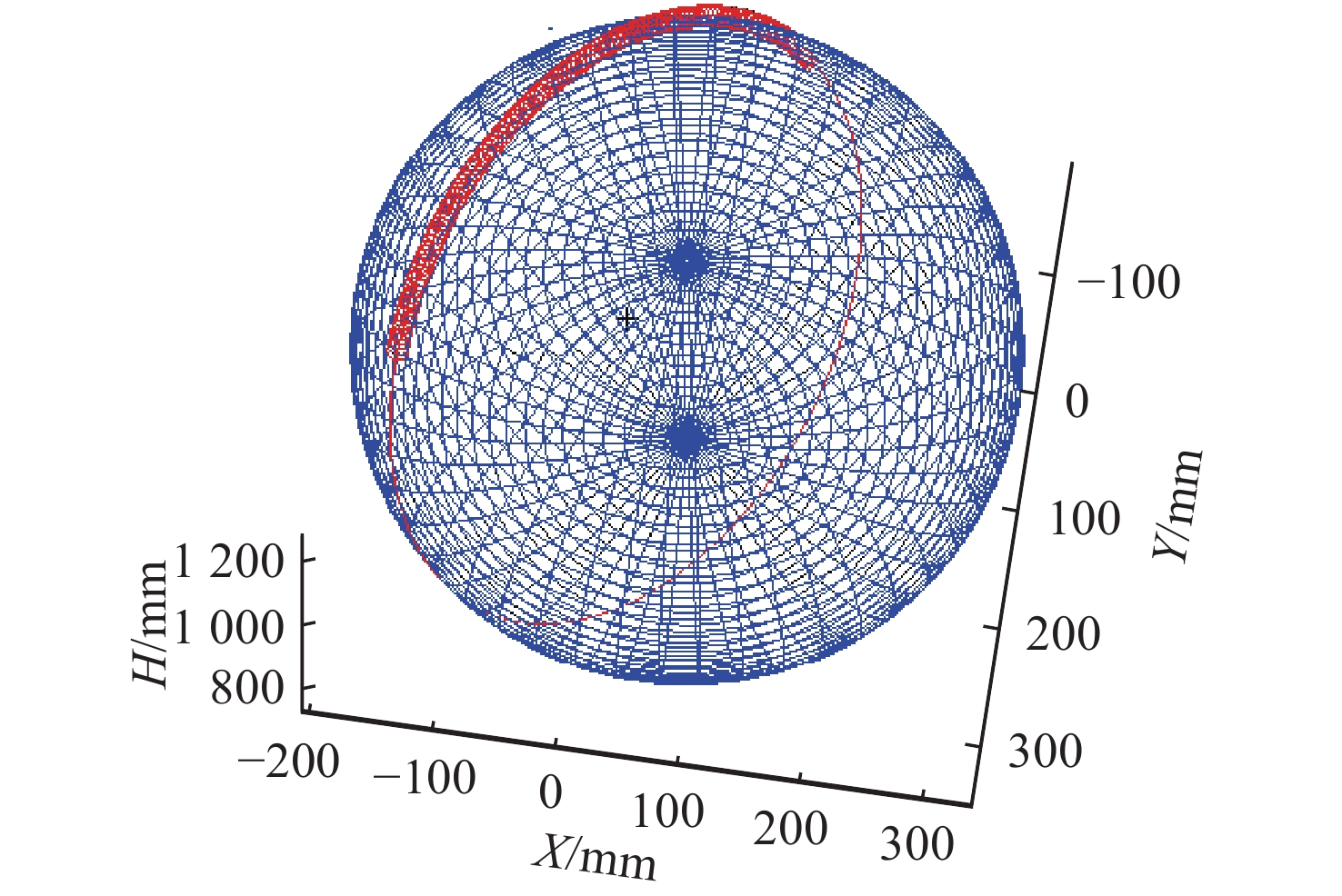
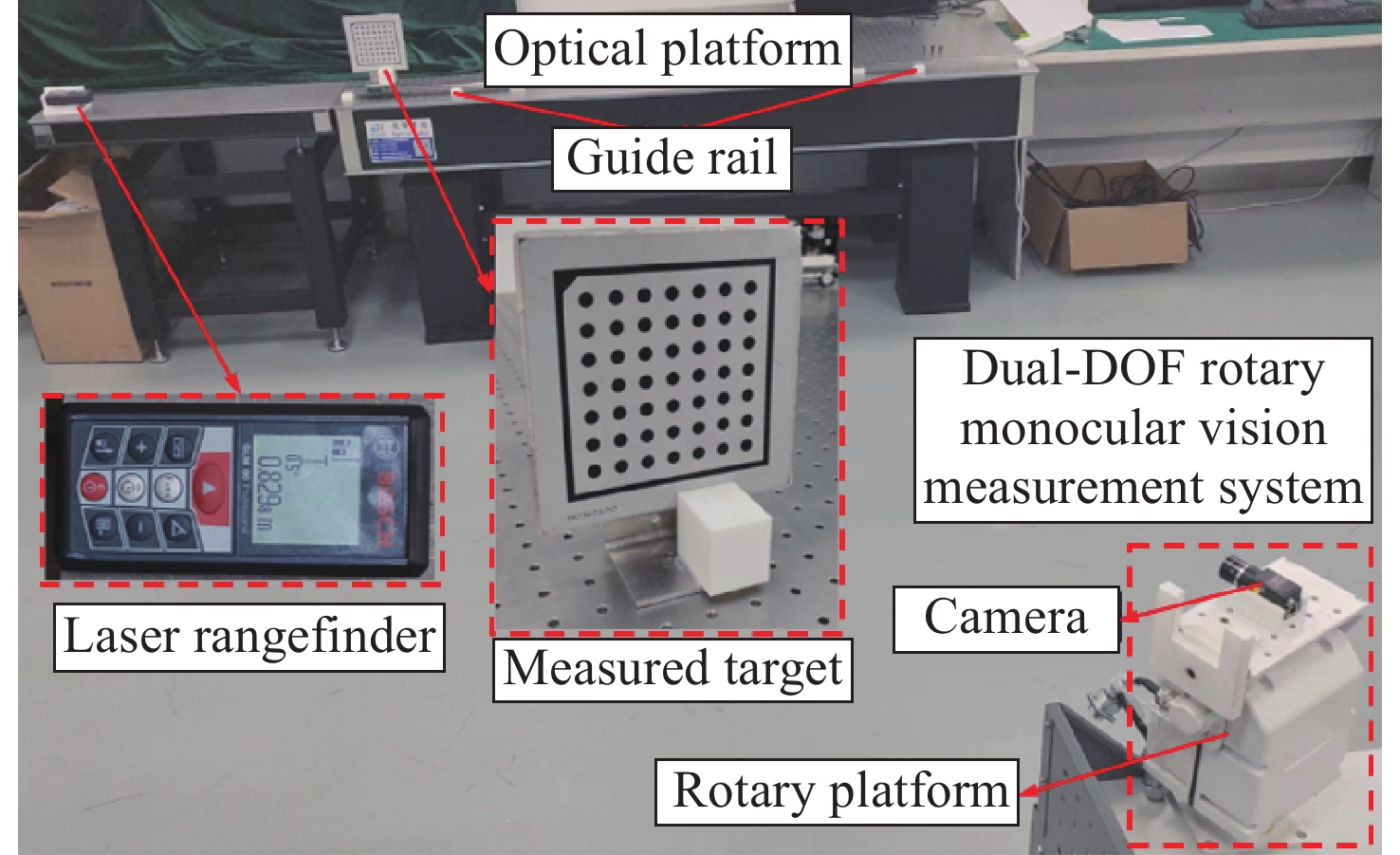
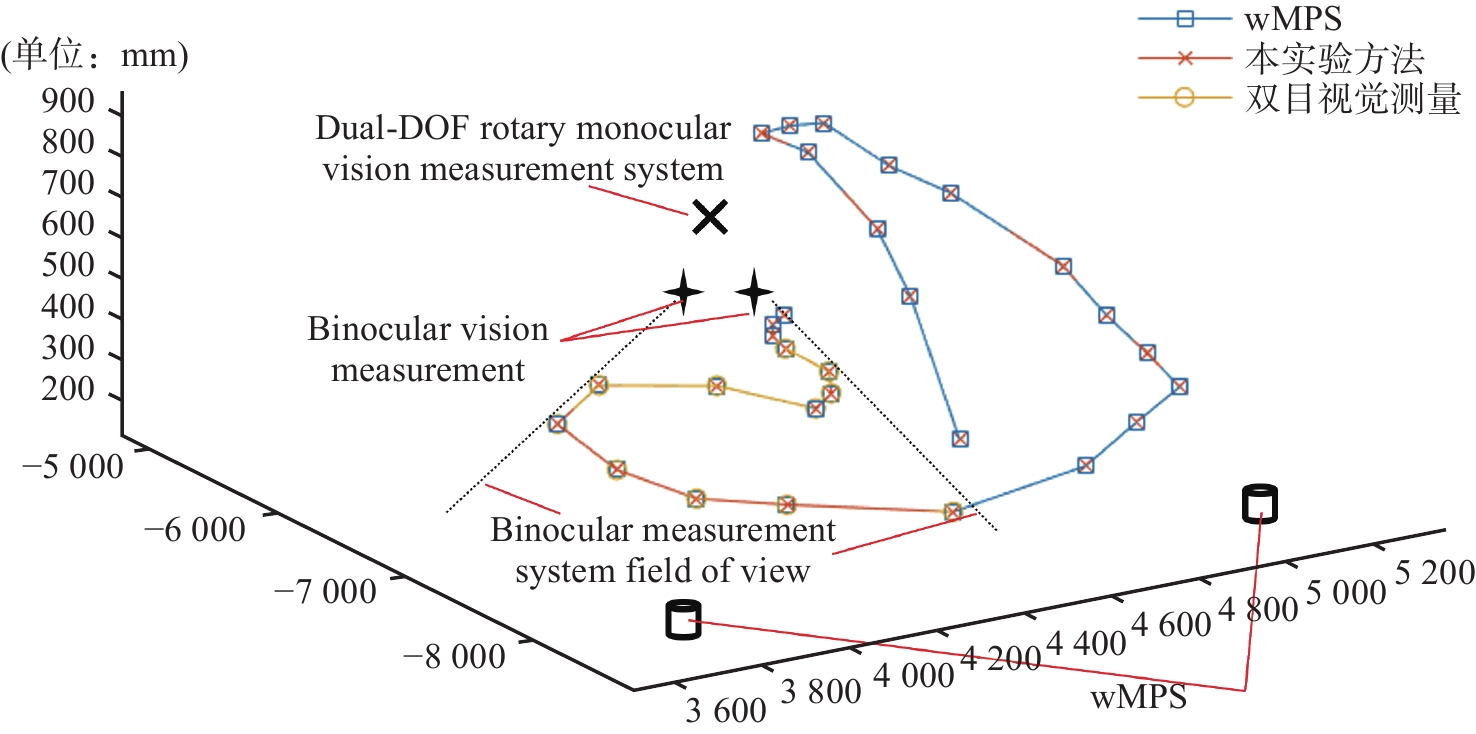
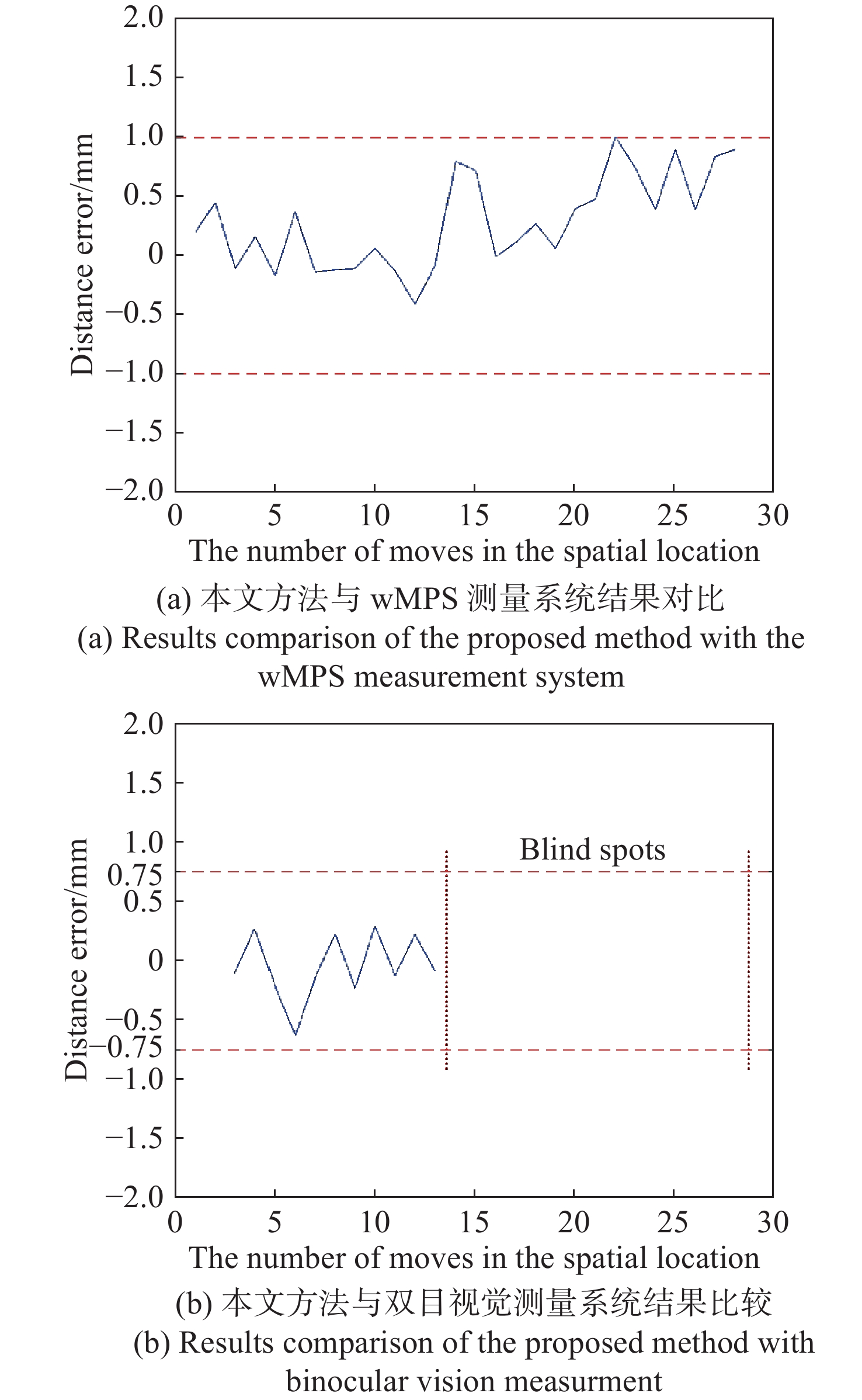
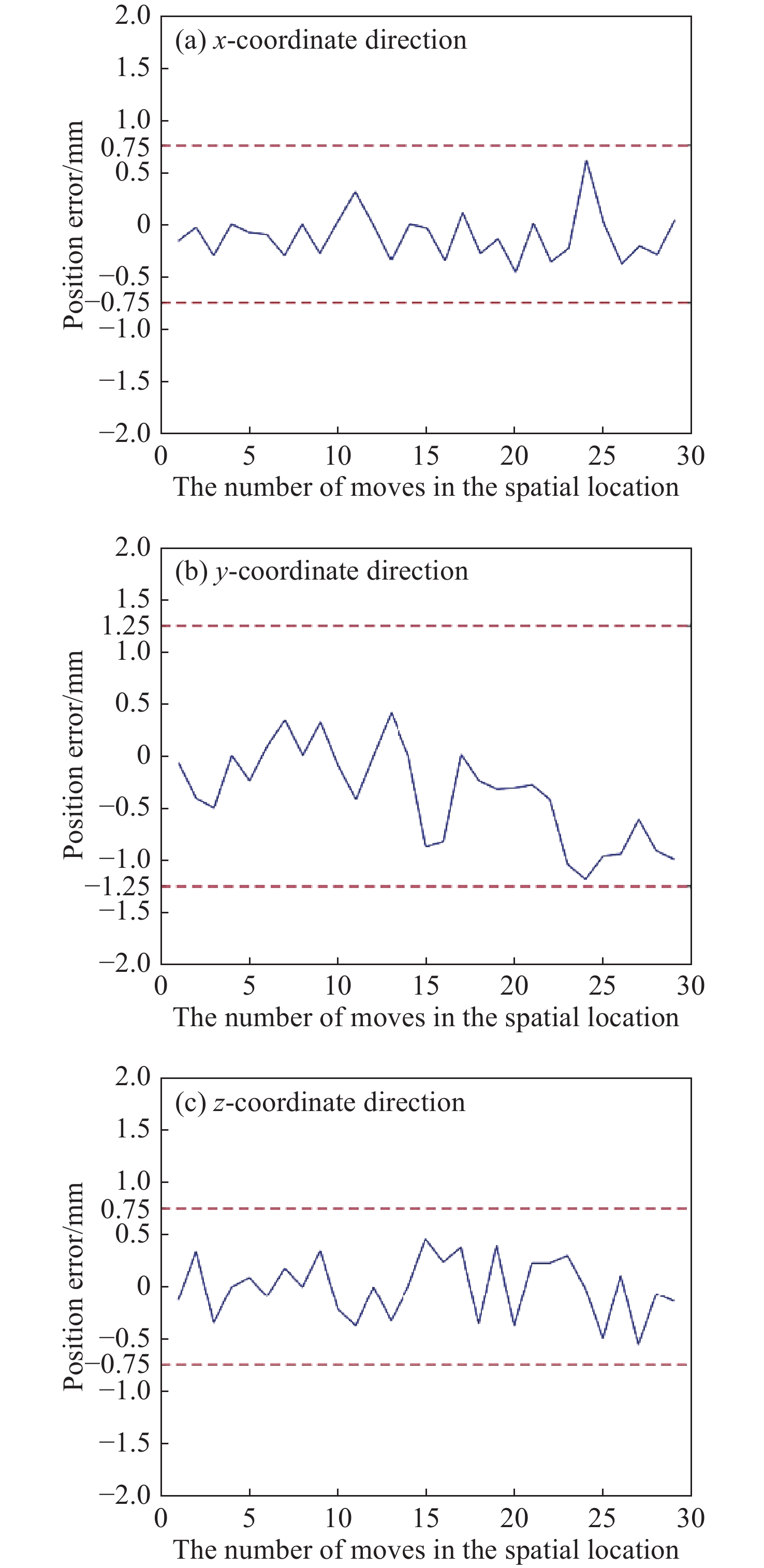
针对传统单目视觉测量系统测量视场有限的问题,本文提出一种基于双自由度旋转平台的全向空间单目视觉测量方法。首先,对双自由度旋转平台的转轴参数进行标定,用副相机拍摄固定在双自由度转台上的棋盘格标定板,提取棋盘格角点的位置坐标,并将其转化到同一相机坐标系下。利用PCA(主成分分析)平面拟合得到初始位置转轴参数中的方向向量,使用空间最小二乘圆拟合方法得到初始位置下转轴参数中的位置参数。然后,通过转台转动的角度以及罗德里格斯公式将不同位置下相机获取的数据进行坐标系统一,实现水平和竖直方向全向空间下的目标测量。最后,通过高精度激光测距仪验证了本方法的测量精度,并通过与双目视觉测量系统、wMPS测量系统进行比对实验,验证了本方法的全向空间测量能力。实验结果表明,本方法测量精度基本达到双目视觉测量系统水平,但测量范围远大于双目视觉测量,可以满足全向空间测量要求。


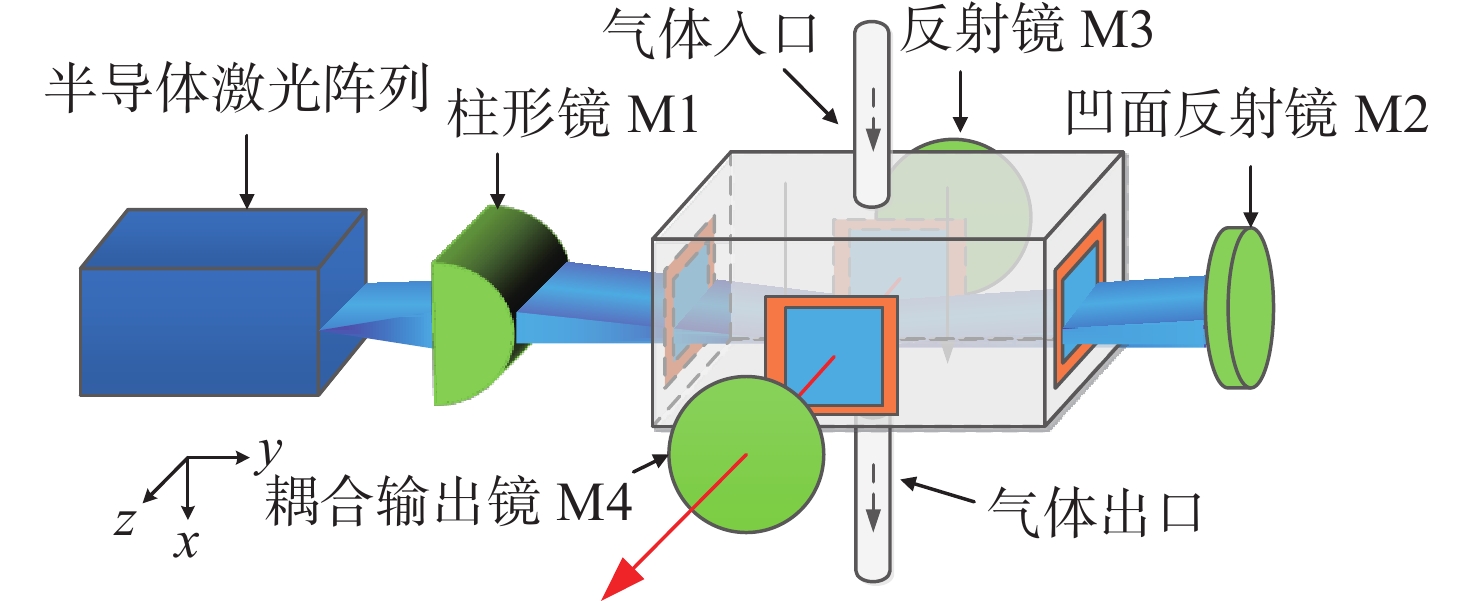
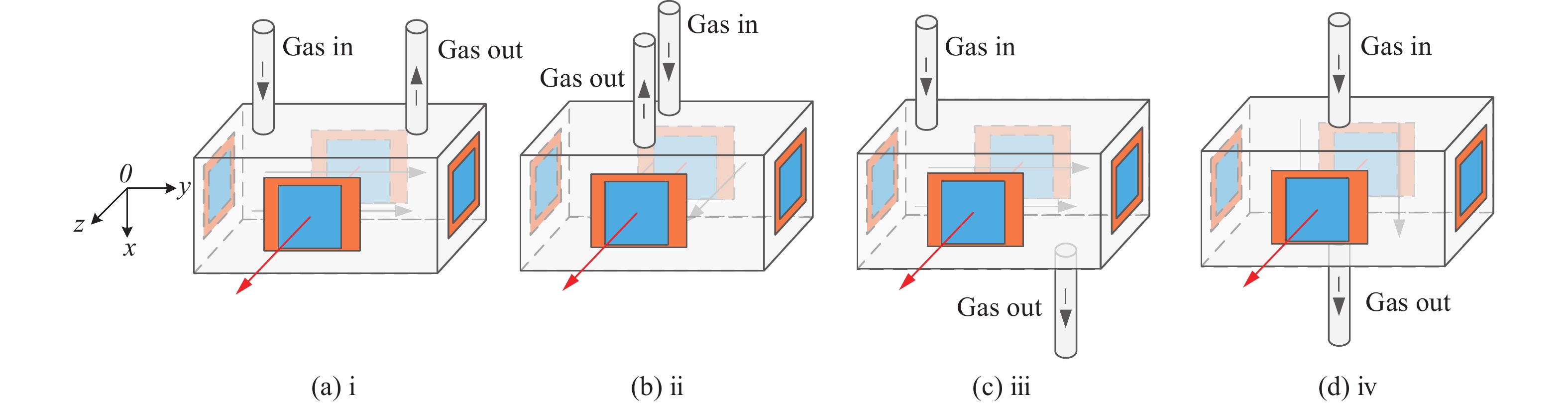
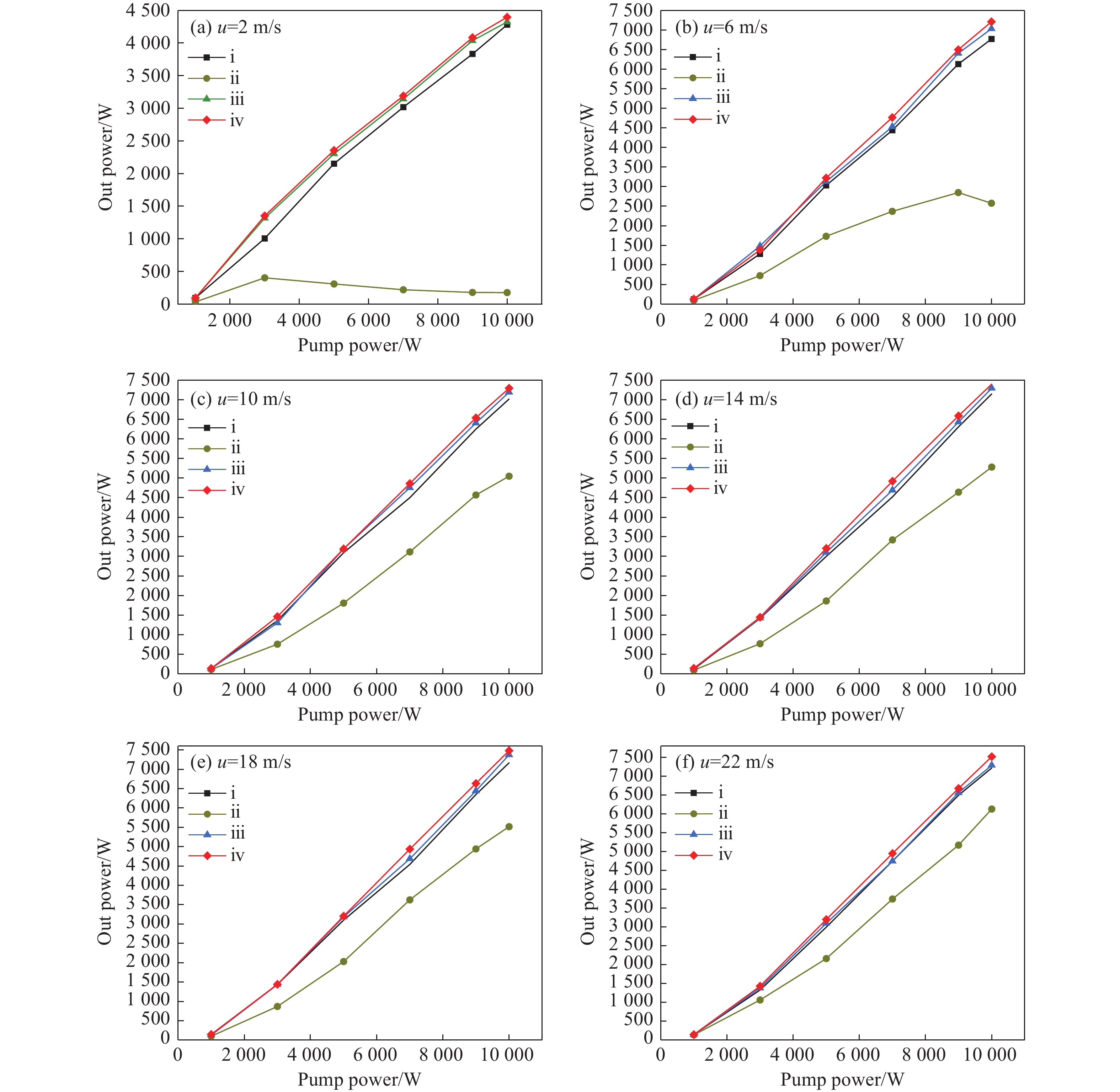
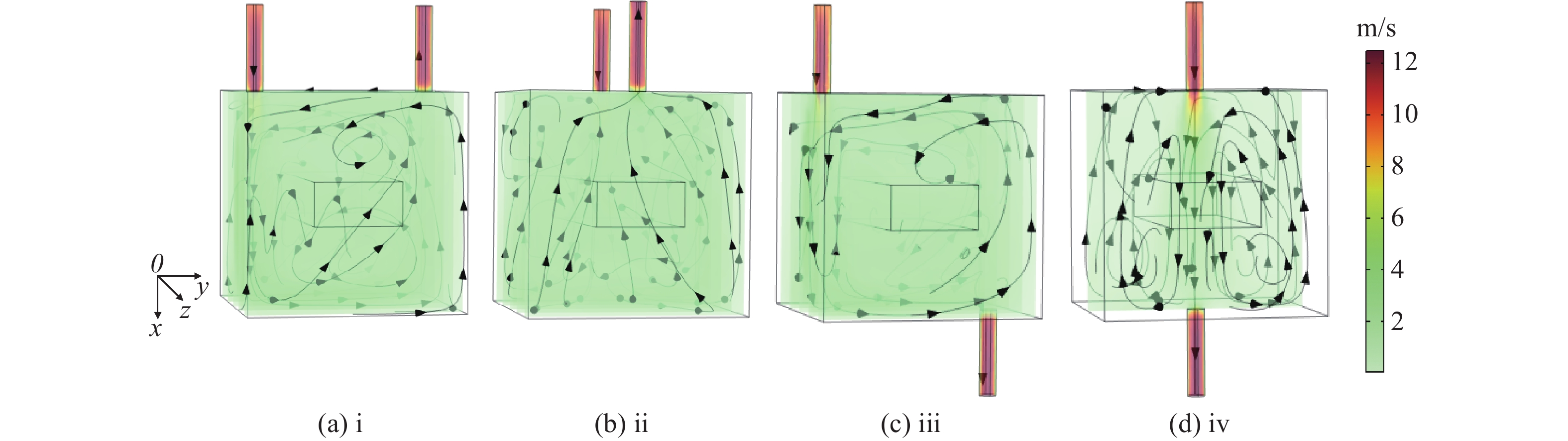
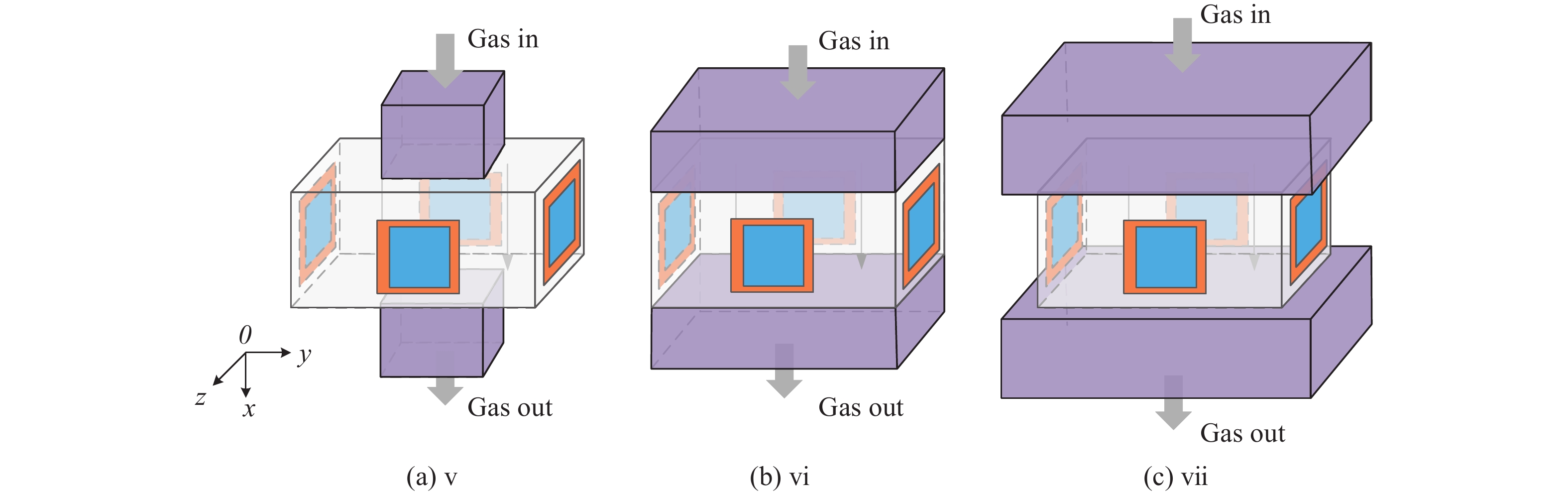
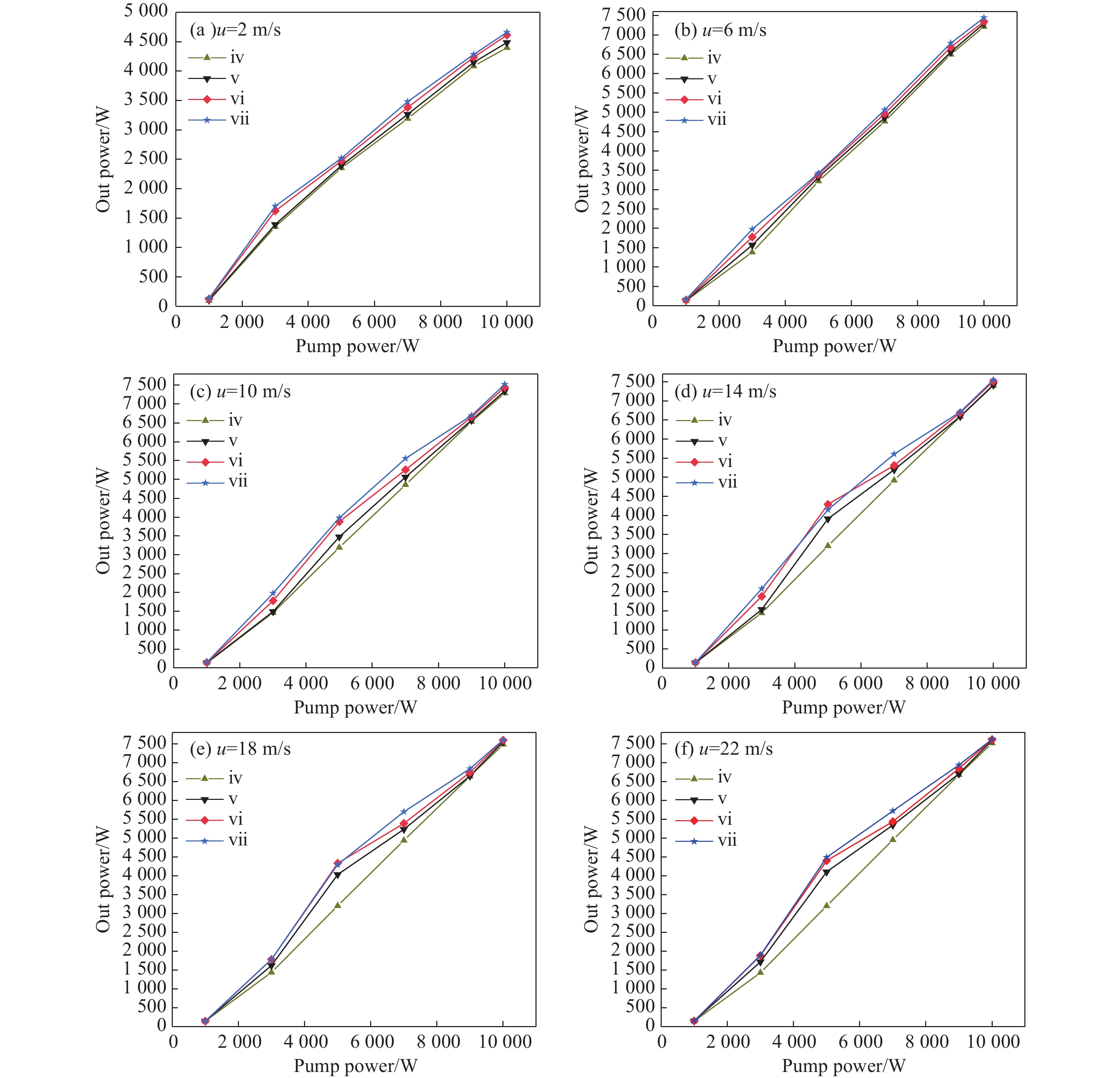
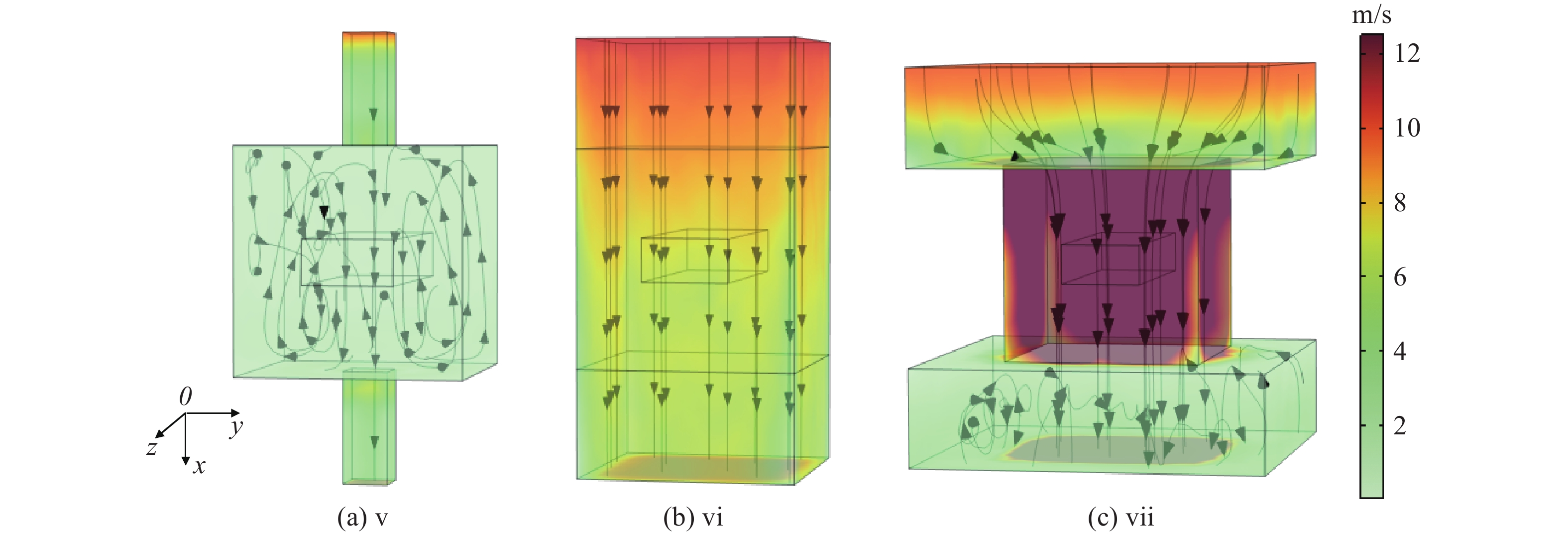
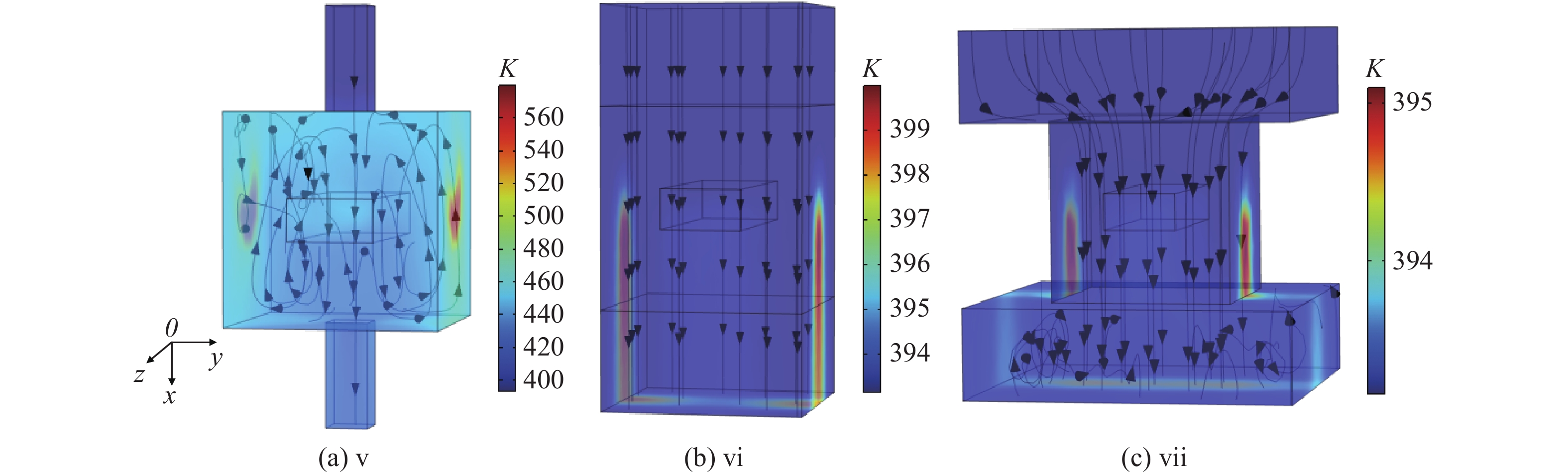
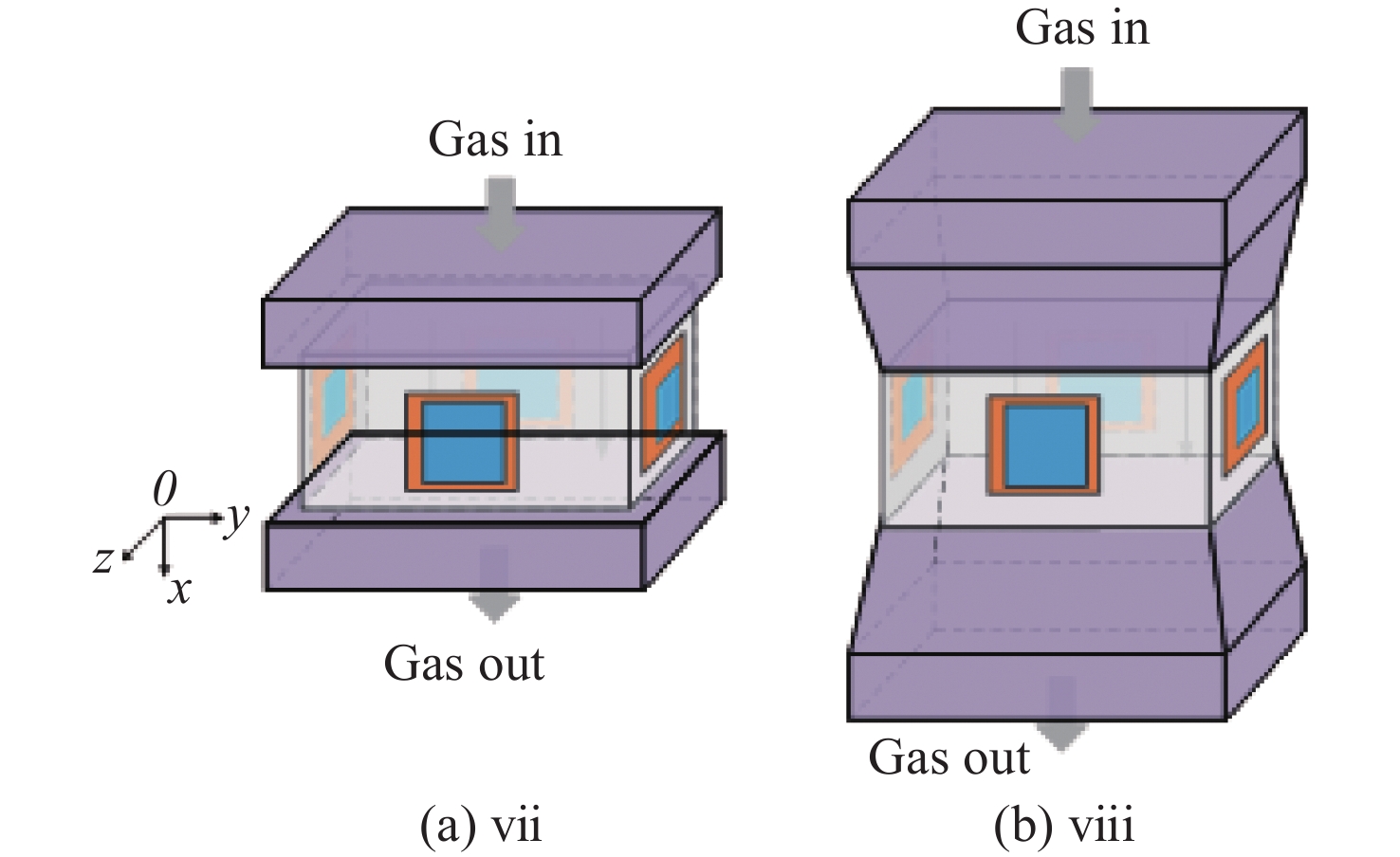
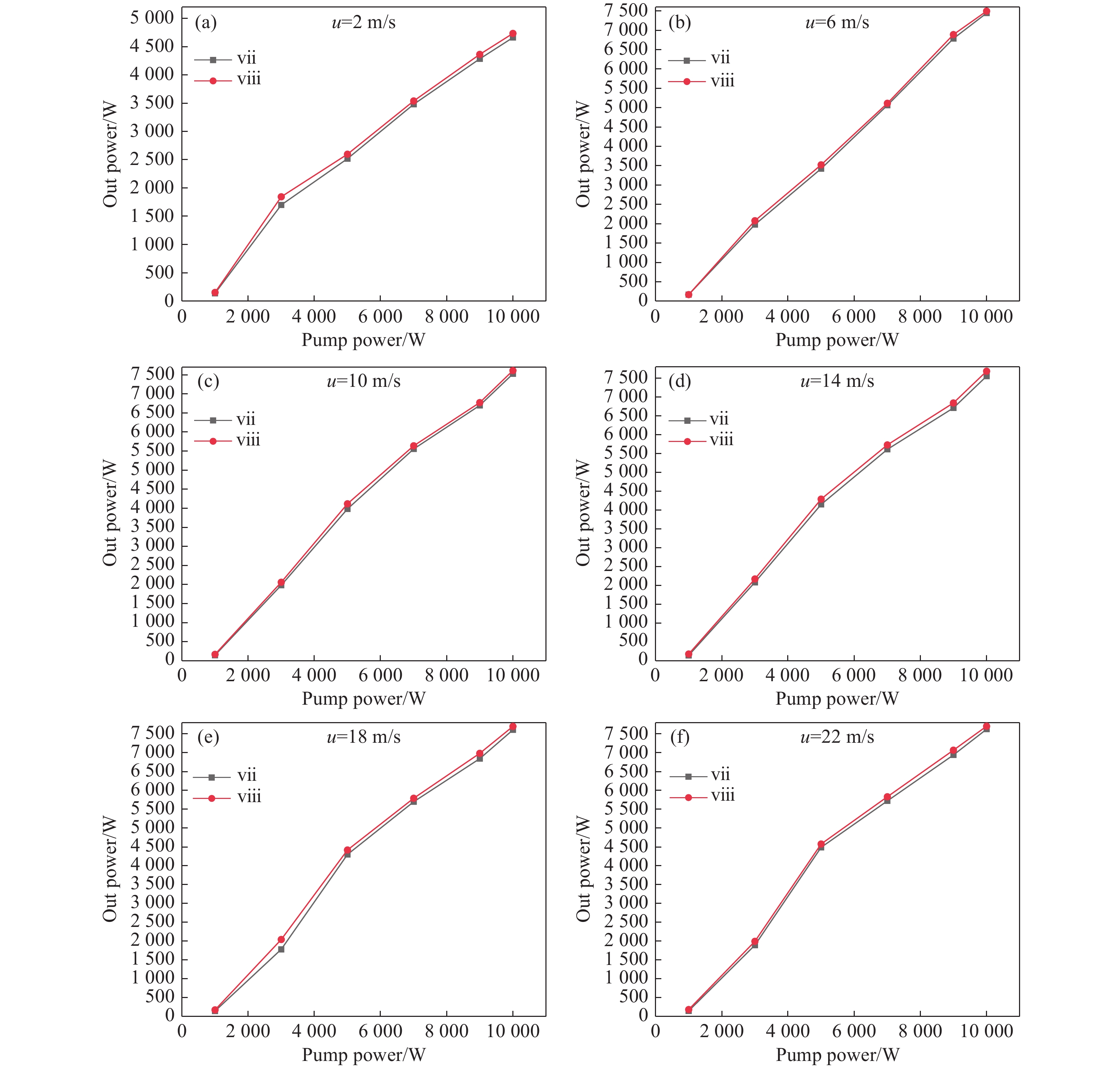
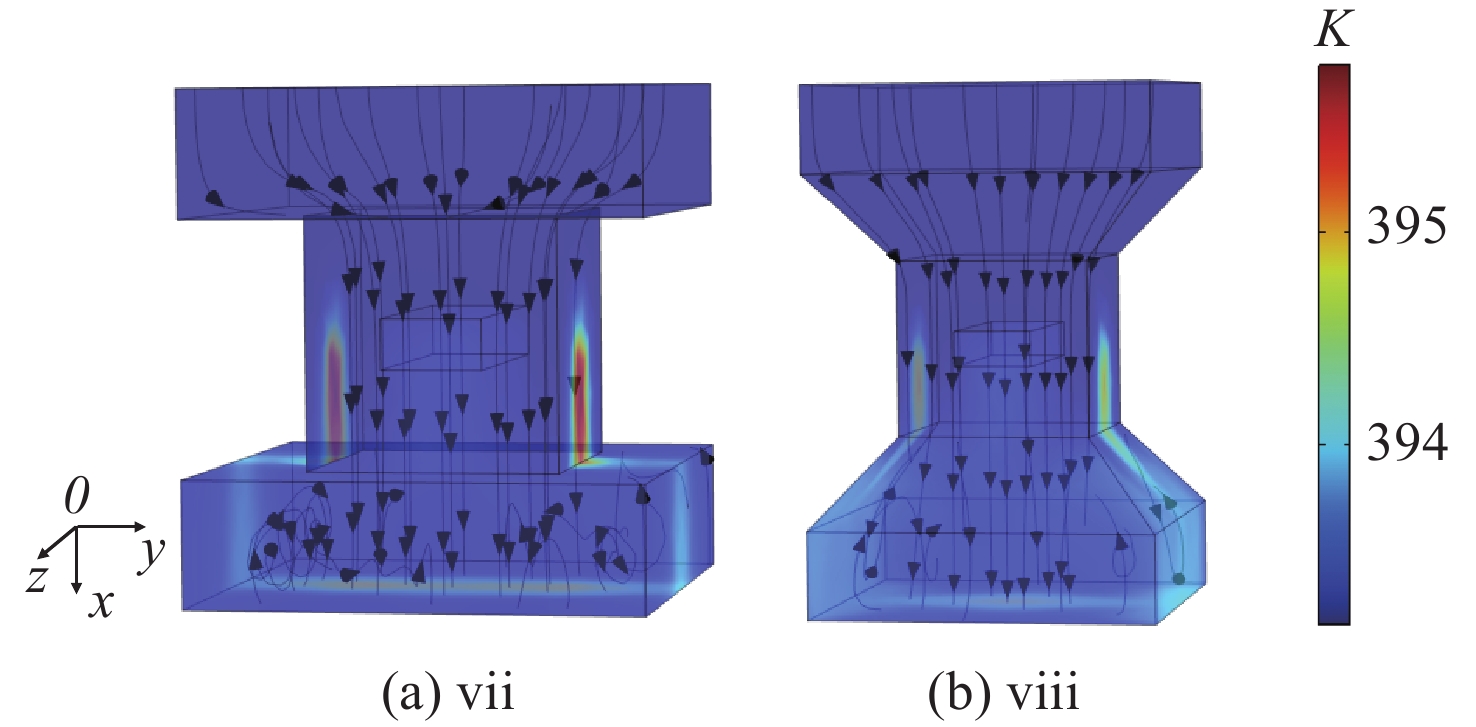
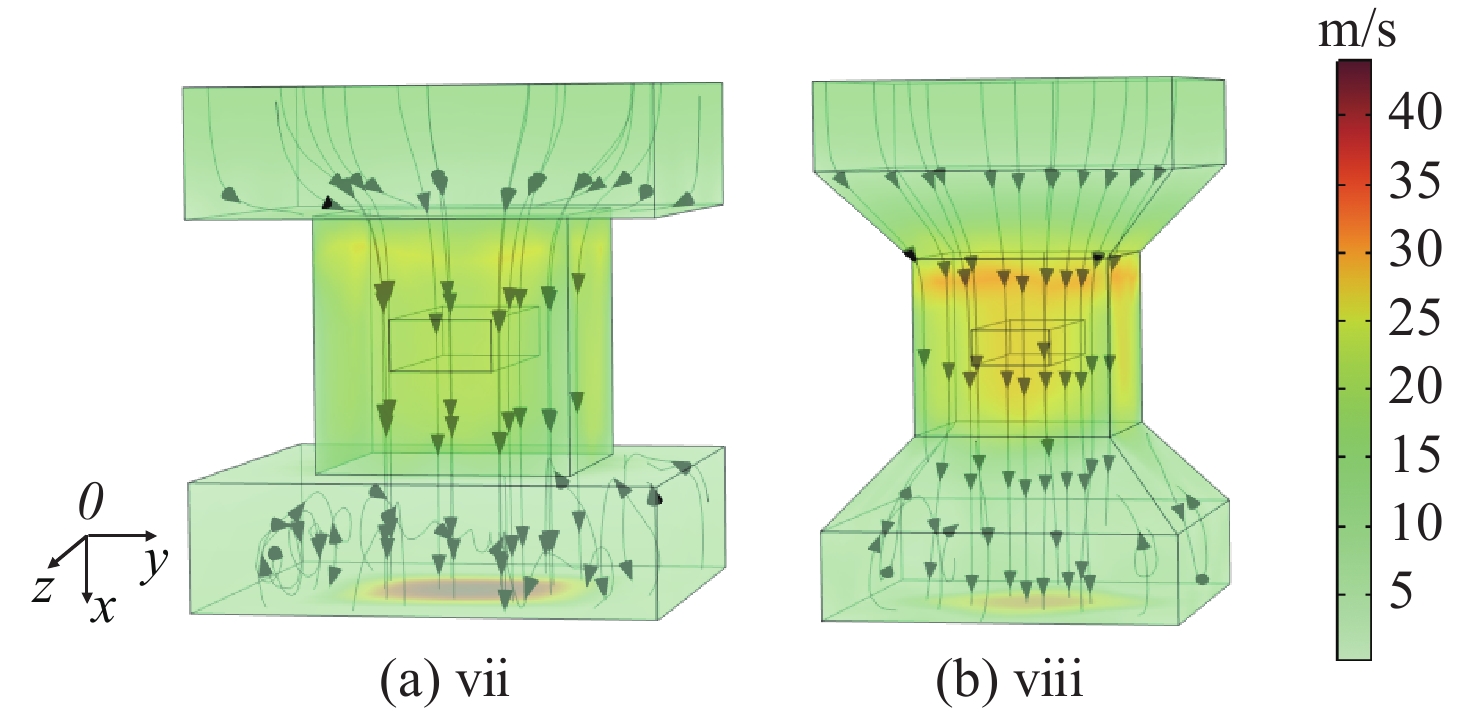
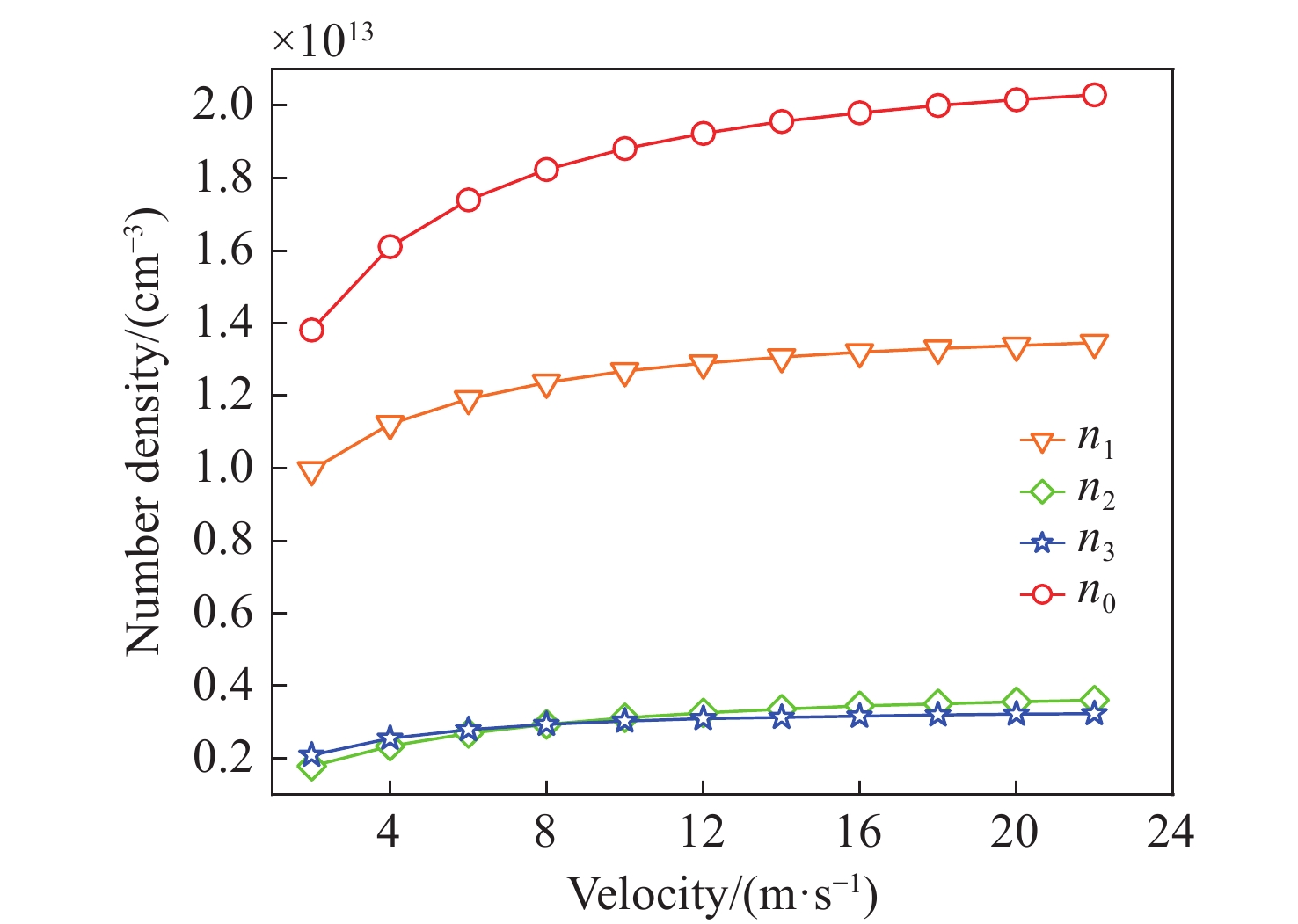
为研究气体流道结构对半导体泵浦流动碱金属蒸气激光器(FDPAL)输出性能的影响,本文结合FDPAL中气体传热、流体力学和激光动力学过程建立了FDPAL理论模型,以侧面泵浦Rb蒸气FDPAL(Rb-FDPAL)为仿真对象,分析气体流动方向、流道横截面积和流道形状等对Rb-FDPAL输出性能的影响。结果表明,采用横流方式,通过提高流道横截面积并将气体流道与蒸气池连接部位设置为砌体结构时,蒸气内涡流得到有效抑制,气体流速增加,蒸气池内热效应更小,Rb-FDPAL的激光输出功率和斜率效率更高,仿真结果与实验相符。



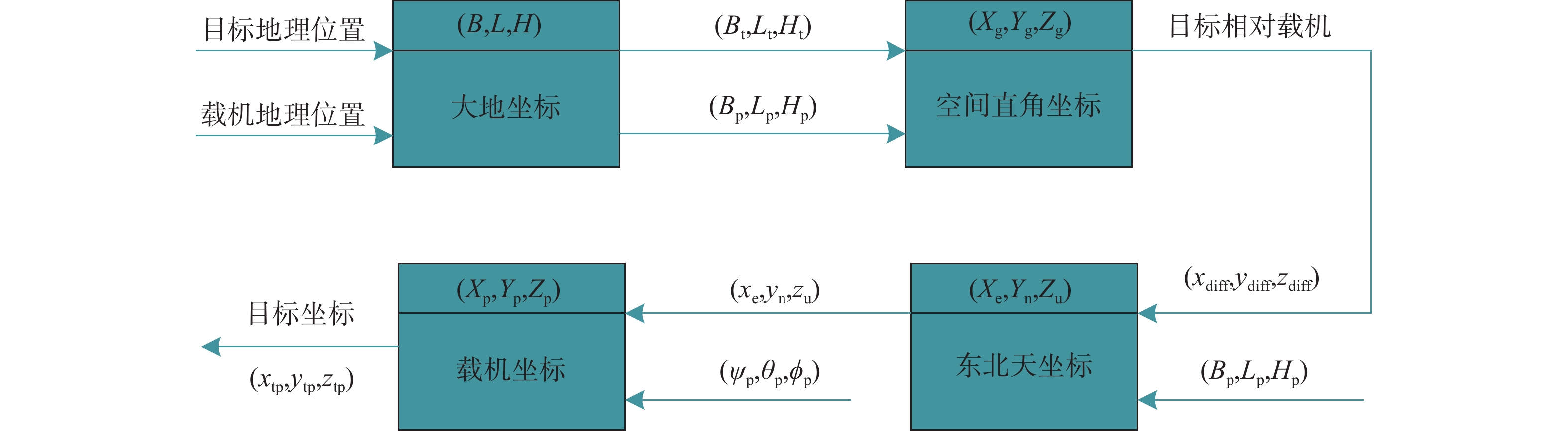
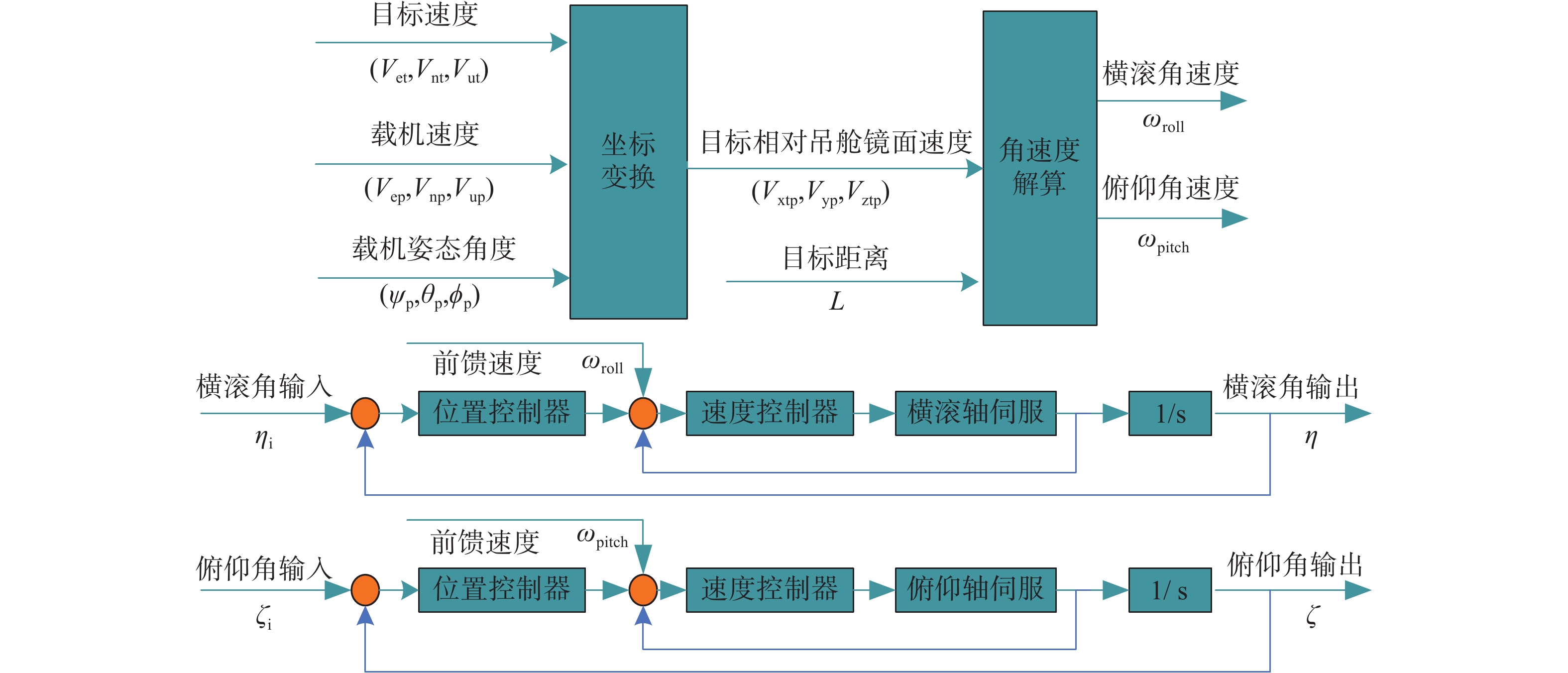
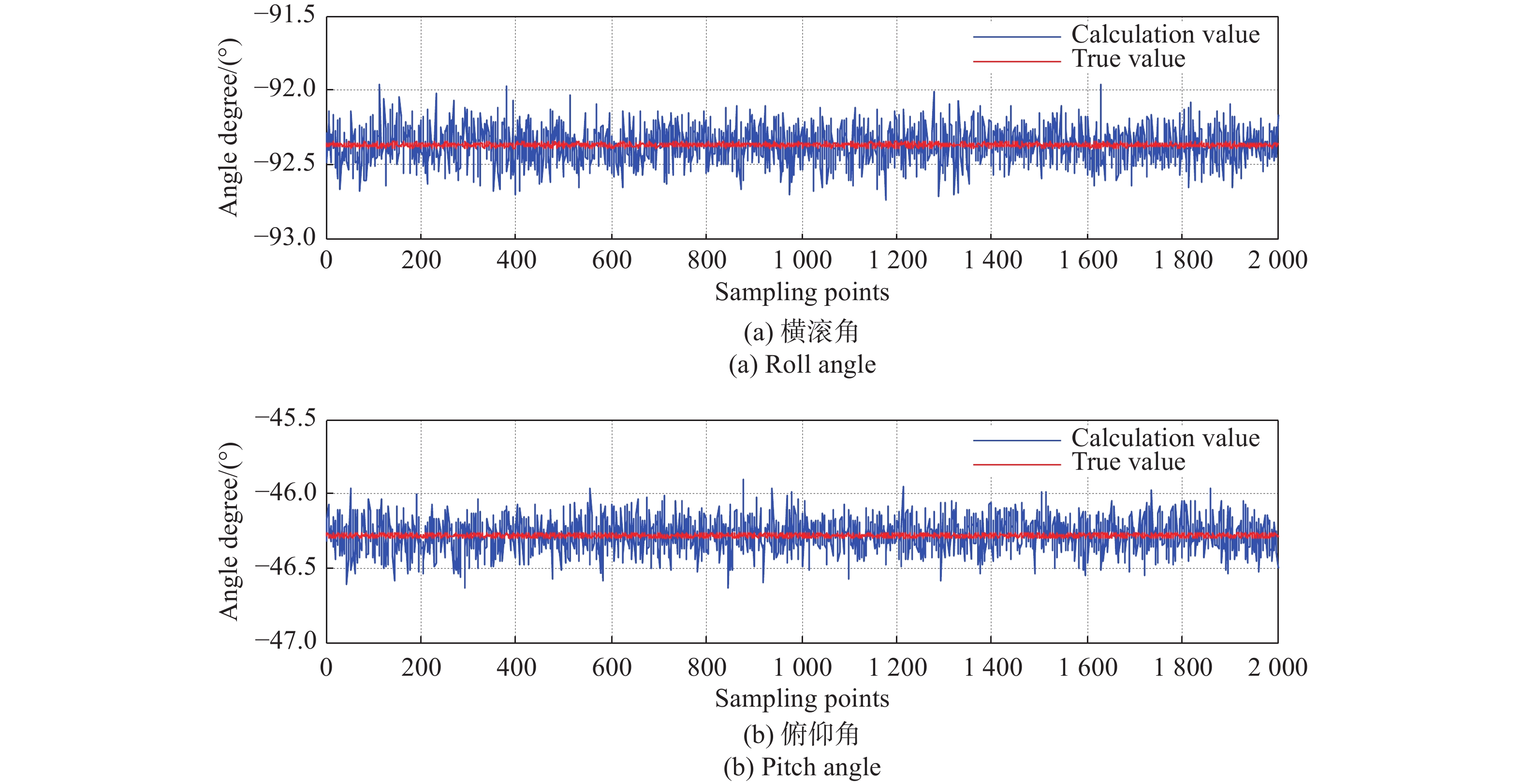
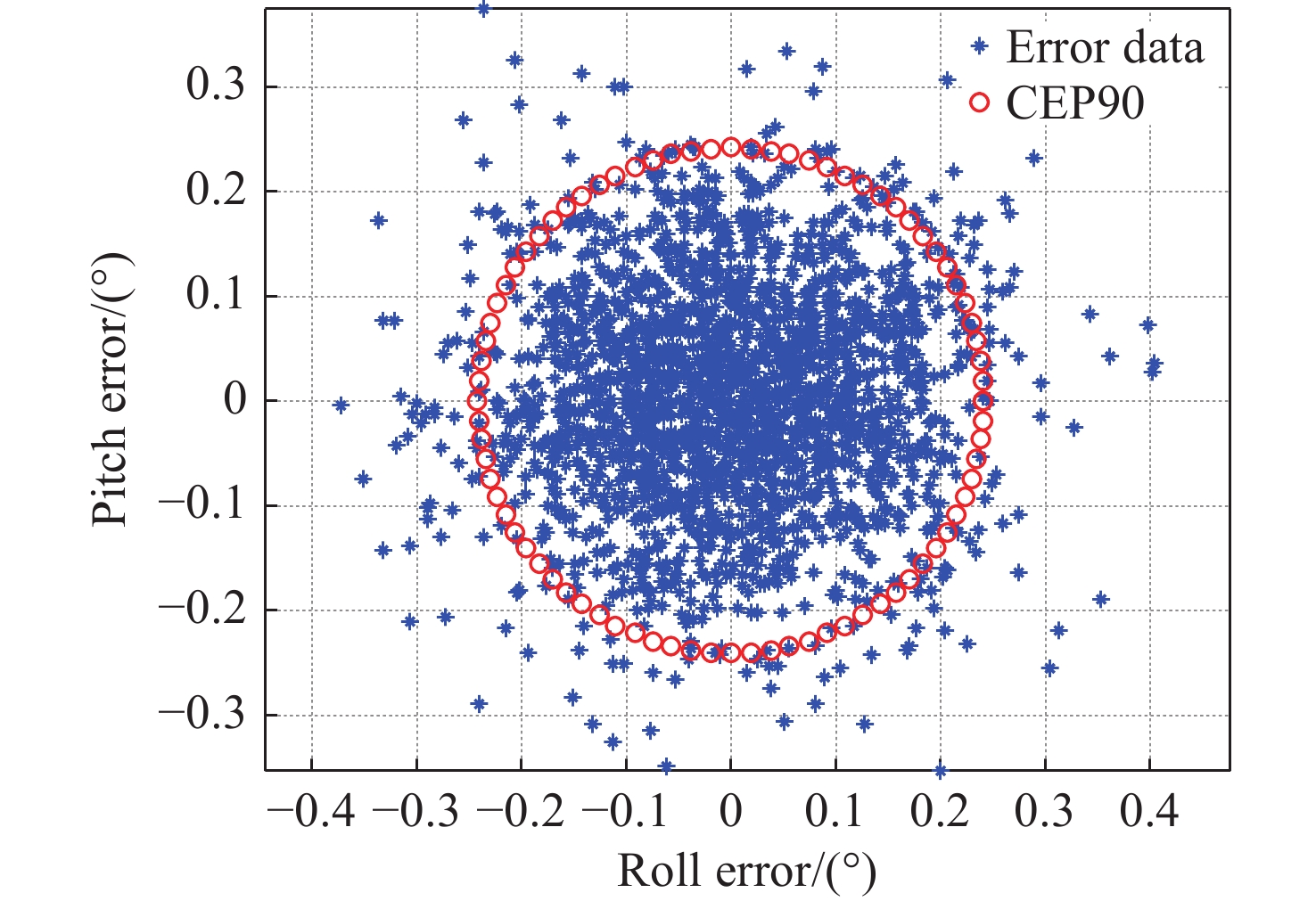
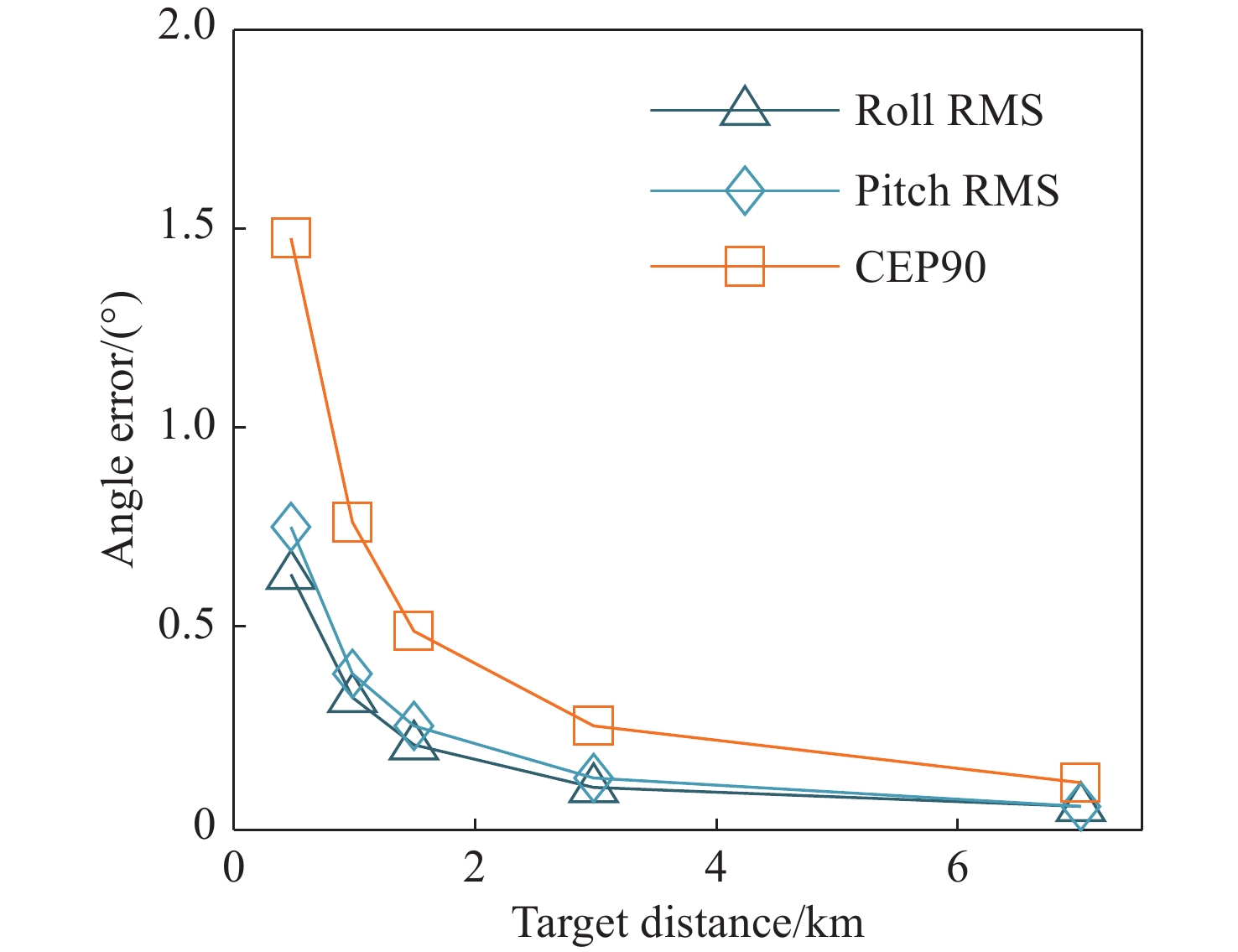
为了提升地理导引精度和成功率,根据滚仰式光电吊舱的结构特点,通过建立坐标系统、目标坐标求解和框架角解算三个步骤,完整构建了地理导引的数学模型,并在此基础上引入了速度前馈和小区域搜索模式。同时,对受惯导测量误差和目标距离影响的框架角解算误差进行了数据仿真。结果表明:经纬误差和航向角误差对俯仰角的解算误差影响较大;而高程误差和水平姿态角误差则对横滚角的解算误差影响较大。提升惯导的定位精度,可进一步减小框架角解算误差,从而提升地理导引精度,而当航向角<0.1°,水平姿态角<0.05°时,姿态角误差的影响权重会变小,再通过减小姿态角误差提升导引精度的作用已不明显。随着目标距离的增大,框架角解算误差会急剧减小。最后进行了导引试验,其俯仰、横滚角均方差均小于0.12°,表明了算法的准确性和仿真分析的有效性。

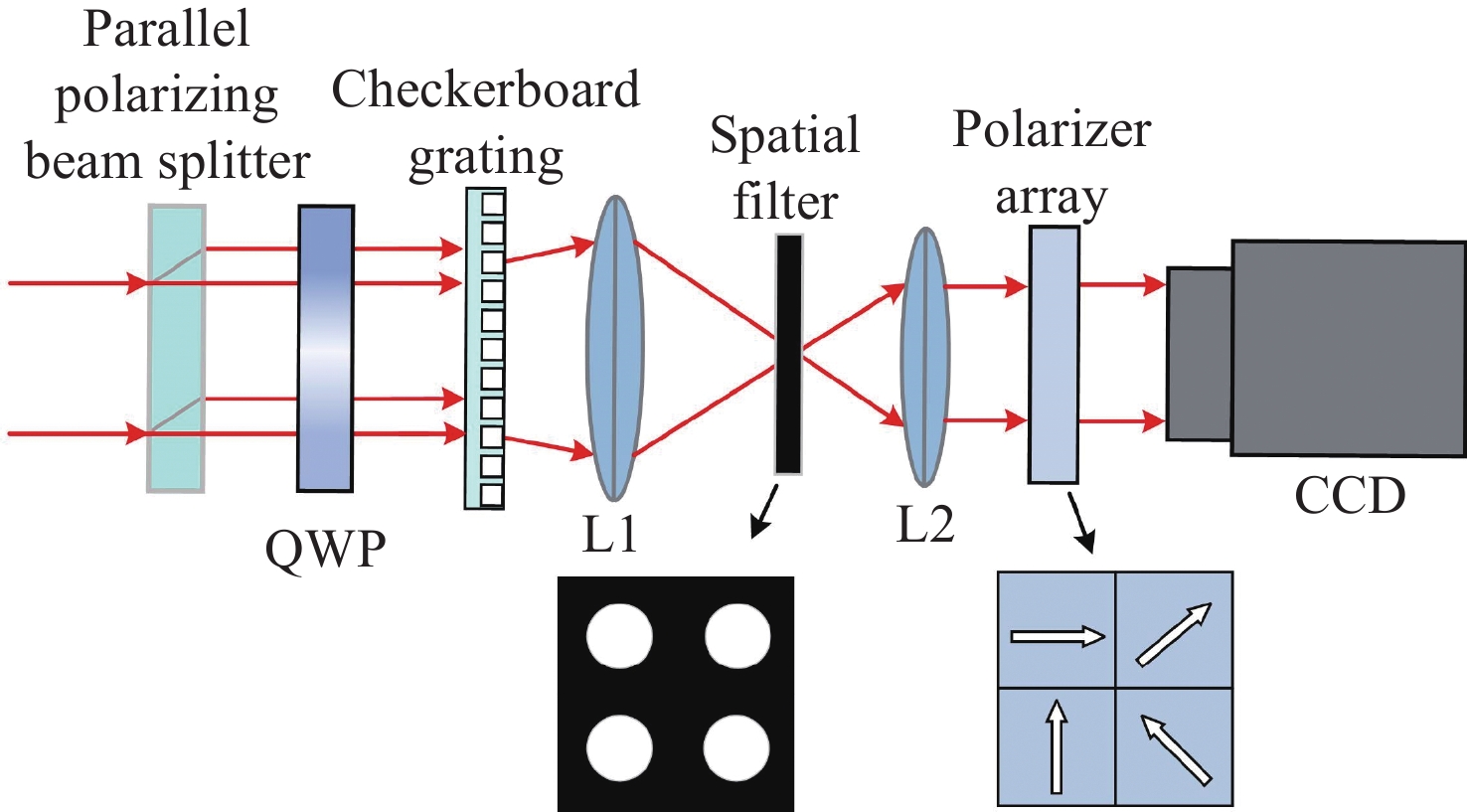
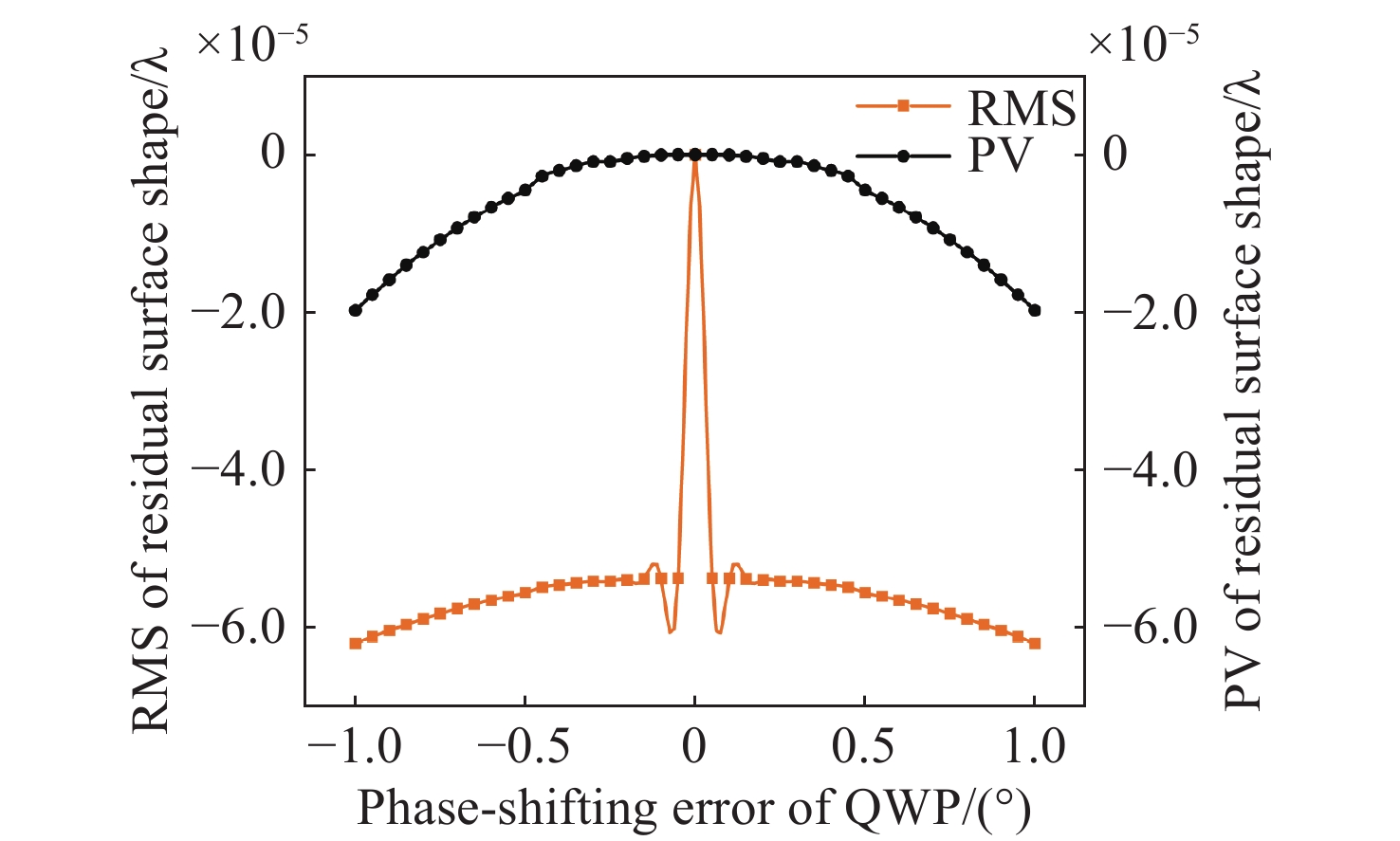
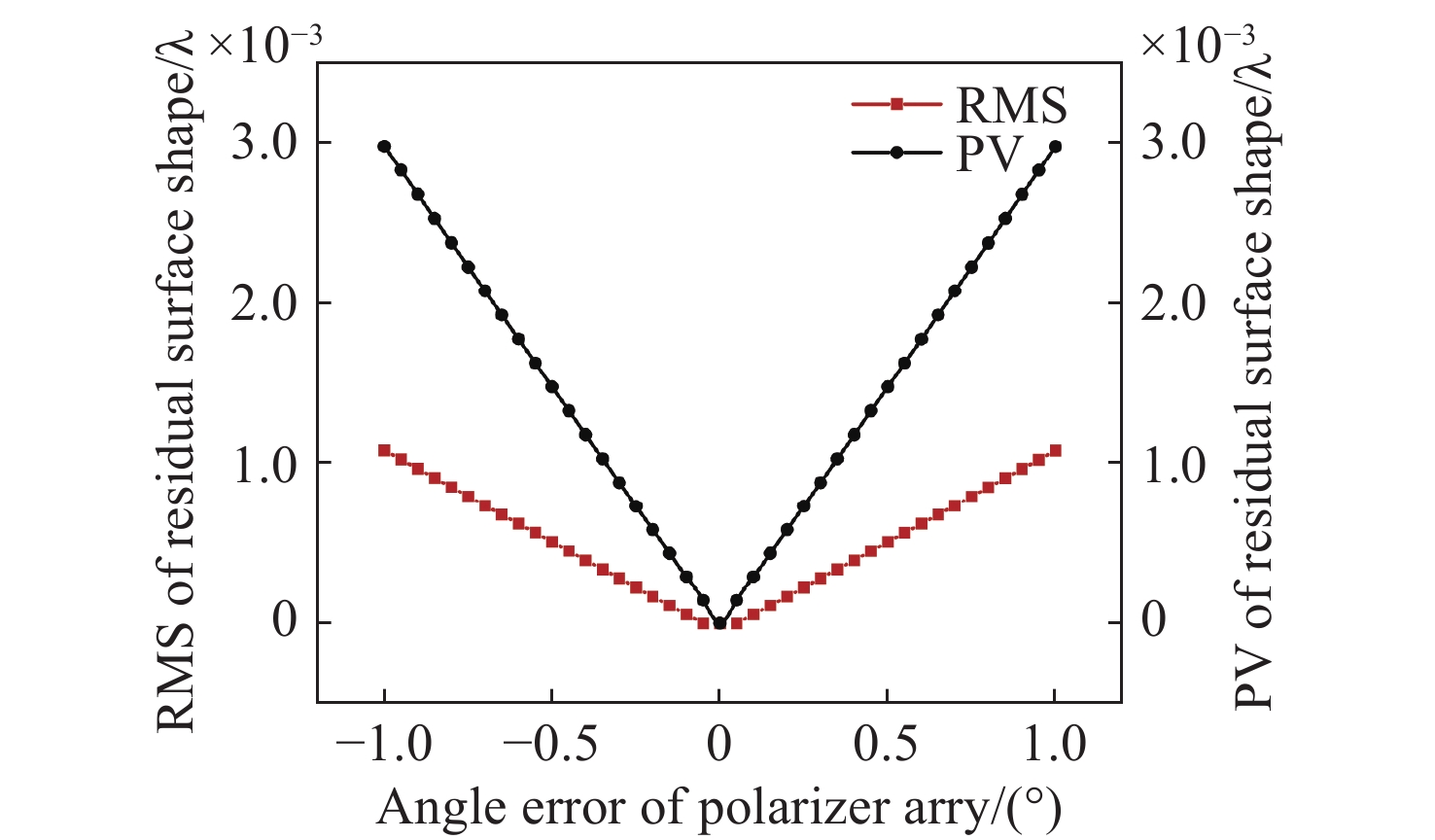
为了对同步相移横向剪切干涉系统中偏振器件的选型、装调以及误差补偿提供可靠的理论依据,本文根据琼斯矩阵原理,构建了系统中1/4波片和偏振片阵列误差对测量结果影响程度的误差模型,对四分之一波片的相位延迟误差、快轴方位角误差以及偏振片阵列透光轴方位角误差对测量结果的影响进行了定量分析。仿真结果表明:1/4波片的相位延迟误差在±1°以内时,波面测量误差为0.00002λ(PV)和0.000062λ(RMS);1/4波片的调整精度在±2°以内时,波面测量误差为0.0001λ(PV)和0.00006λ(RMS);偏振片阵列方位角误差在±1°以内时,测量误差为0.003λ(PV)和0.001λ(RMS)。根据仿真结果对测量系统中偏振元器件进行选型,同时选择两种不同精度的偏振元器件进行对比实验。实验结果的残差值与仿真结果的残差值的PV以及RMS值偏差均小于λ/20,可以在一定程度上验证模型的有效性。本文提出的数学模型可以为同步相移横向剪切干涉系统中偏振器件的选型提供可靠的理论依据。

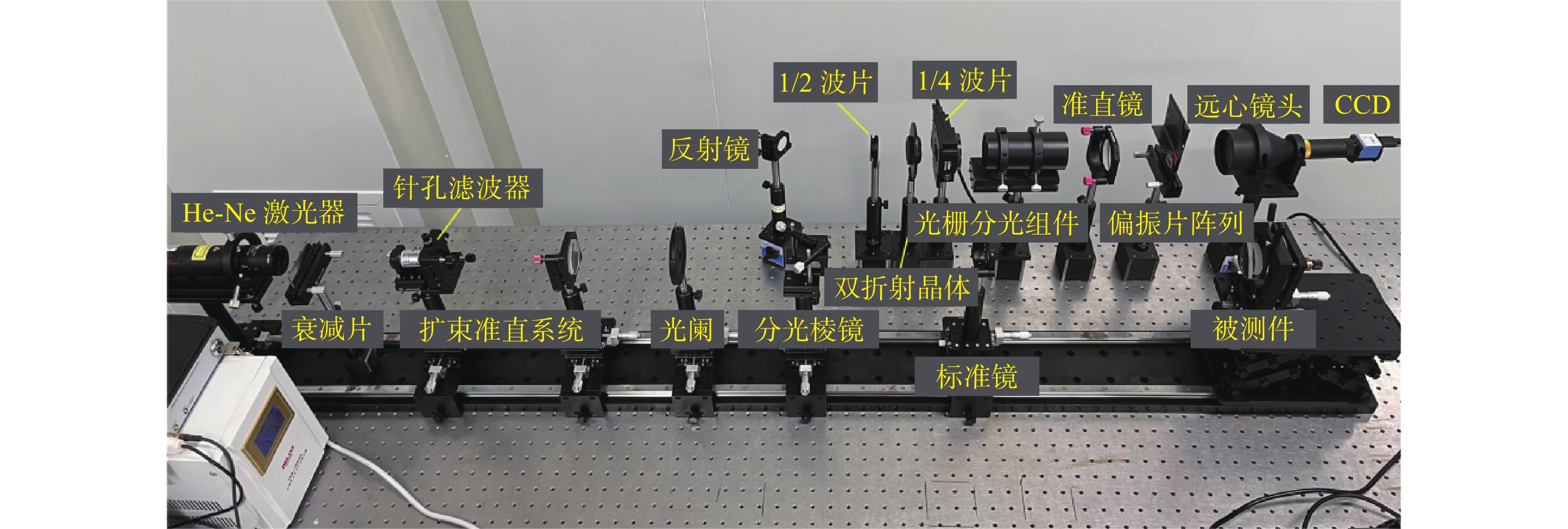
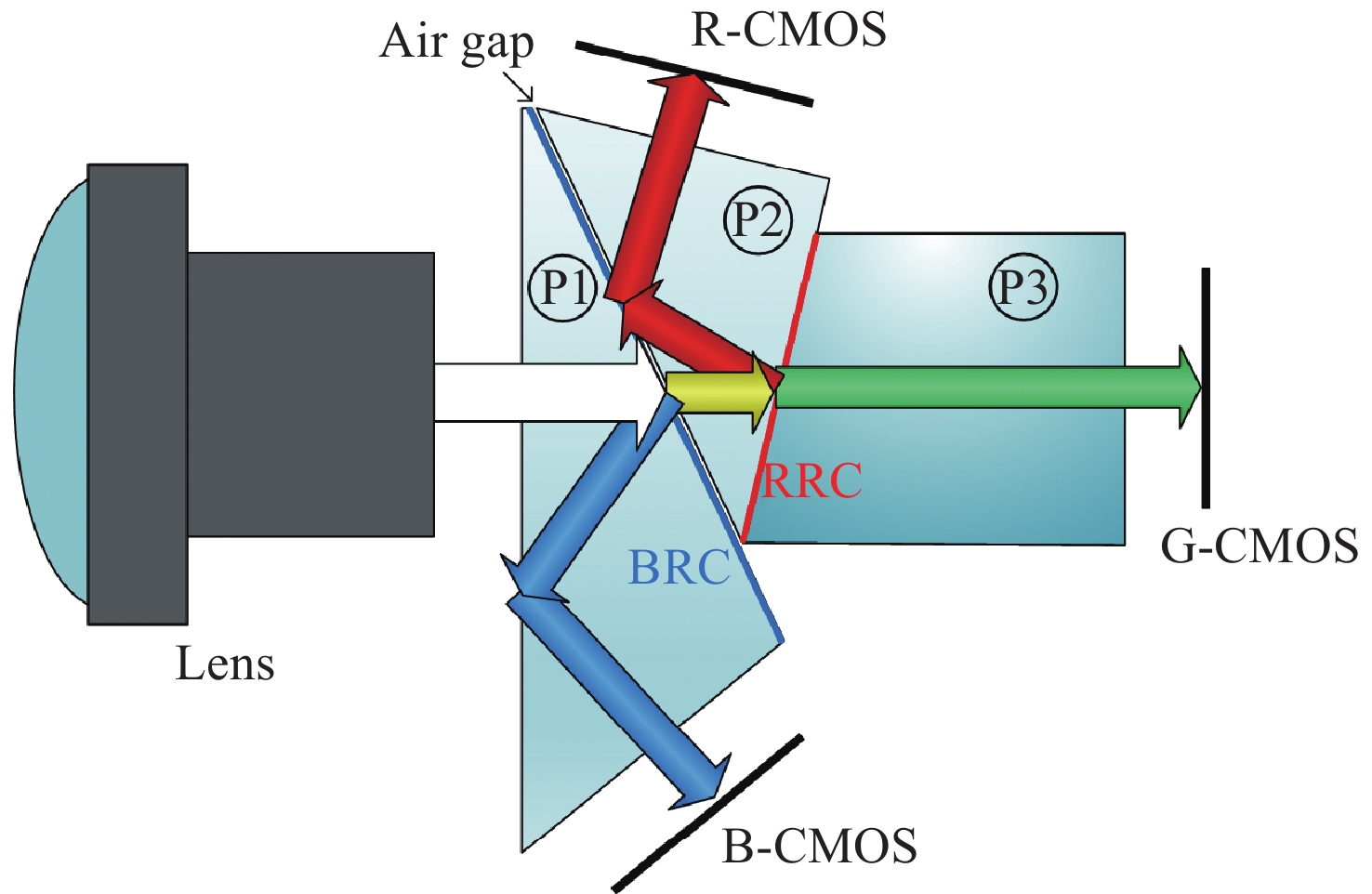
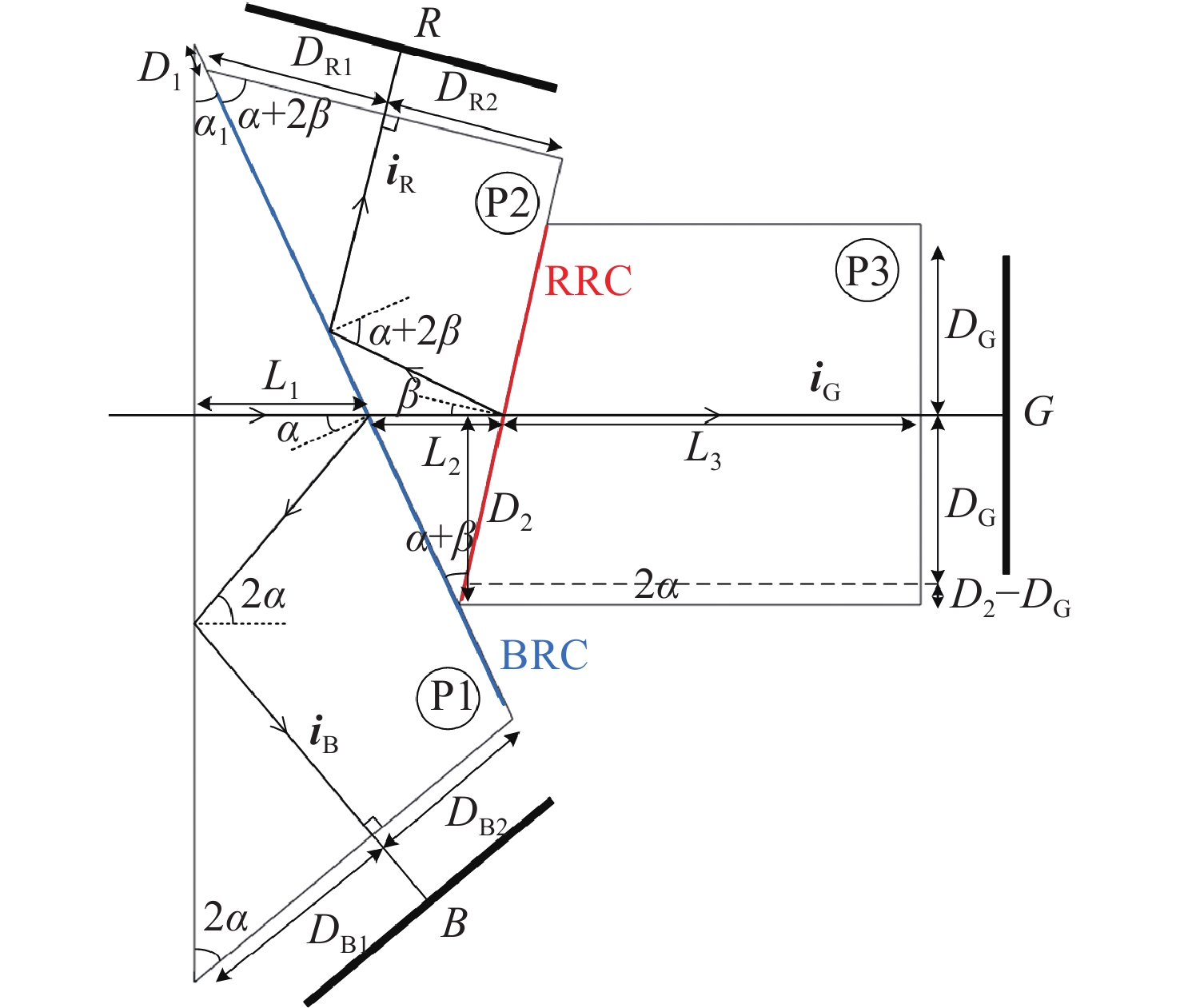
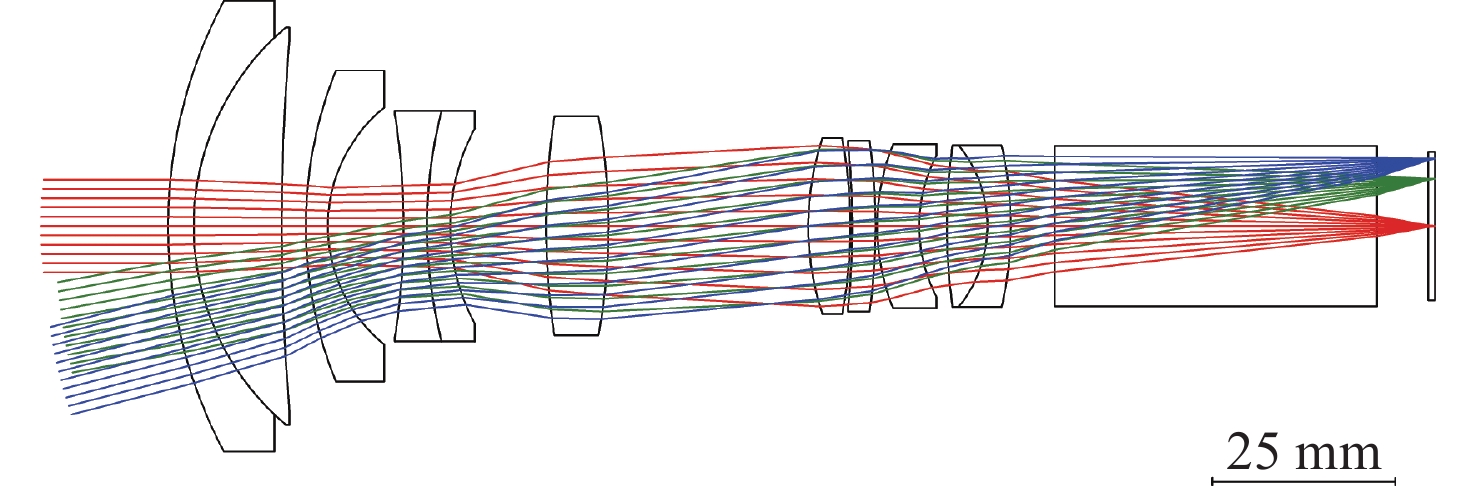
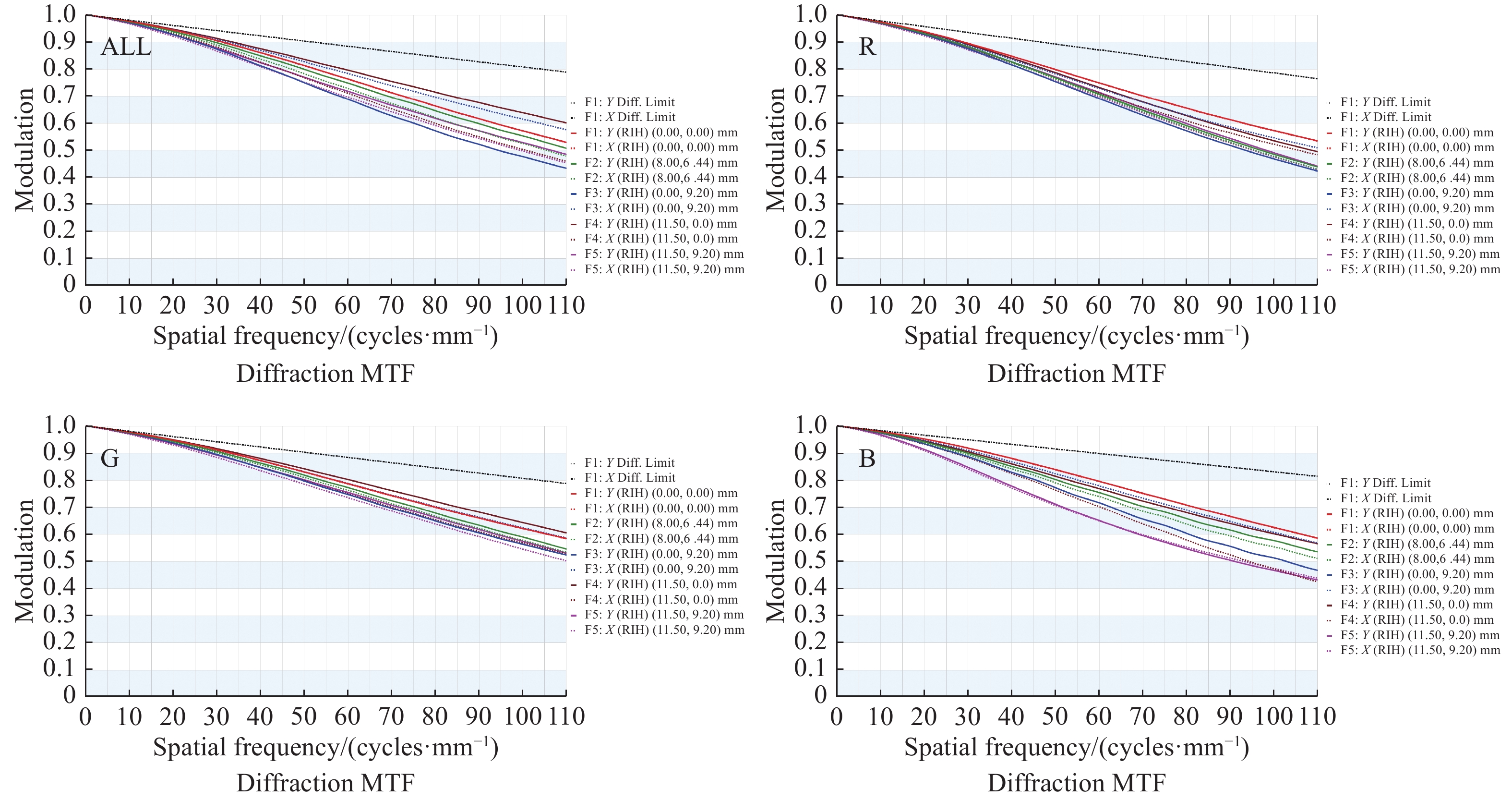
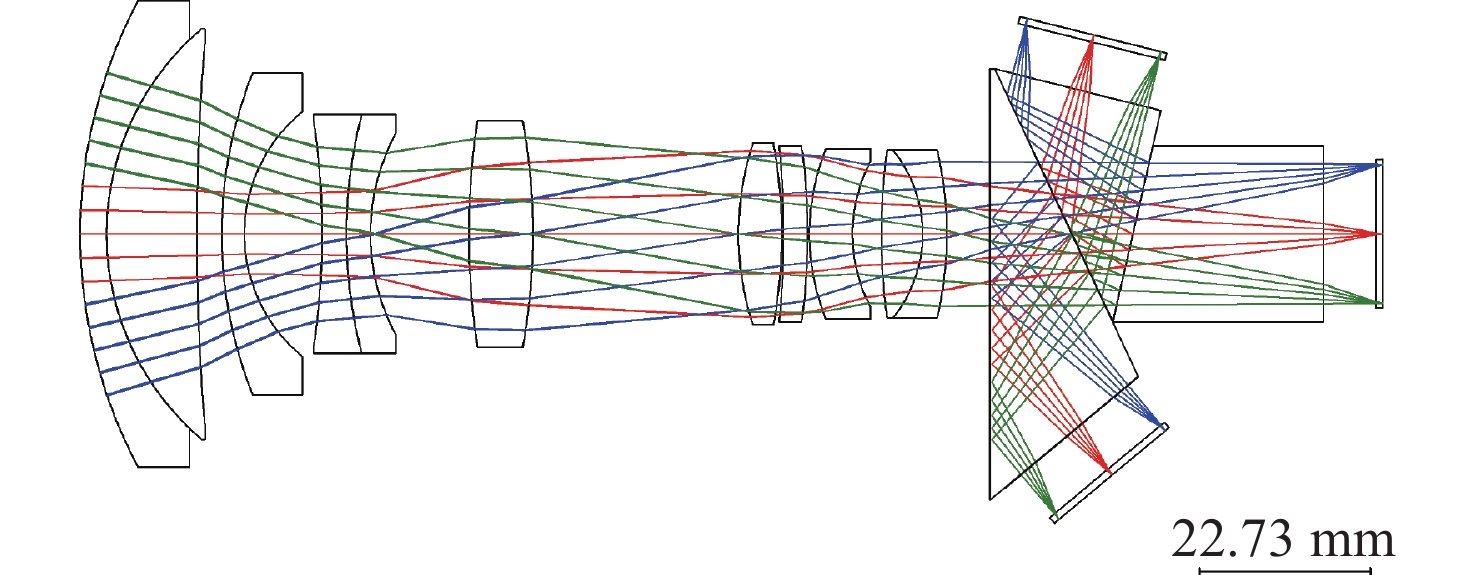
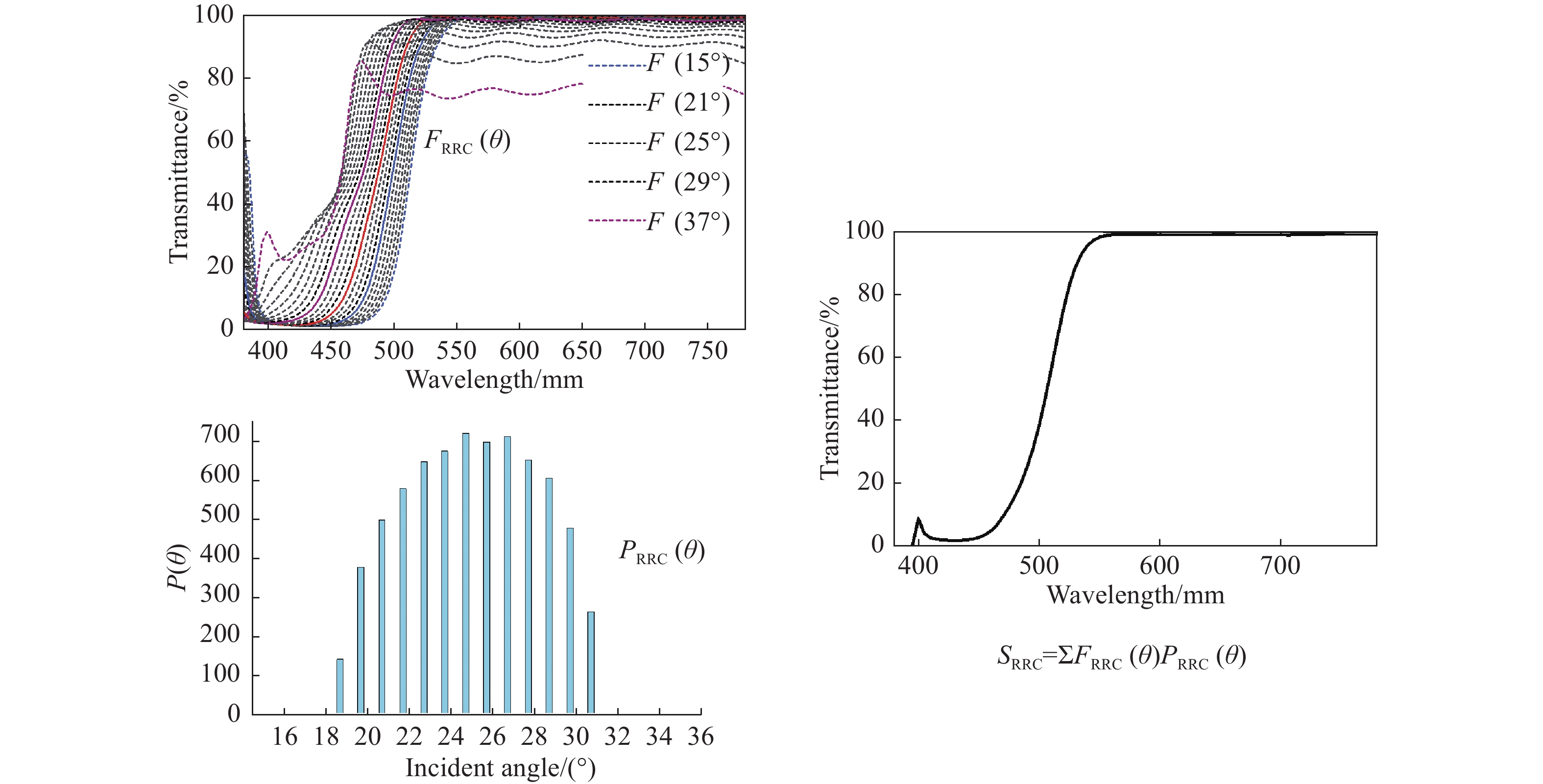
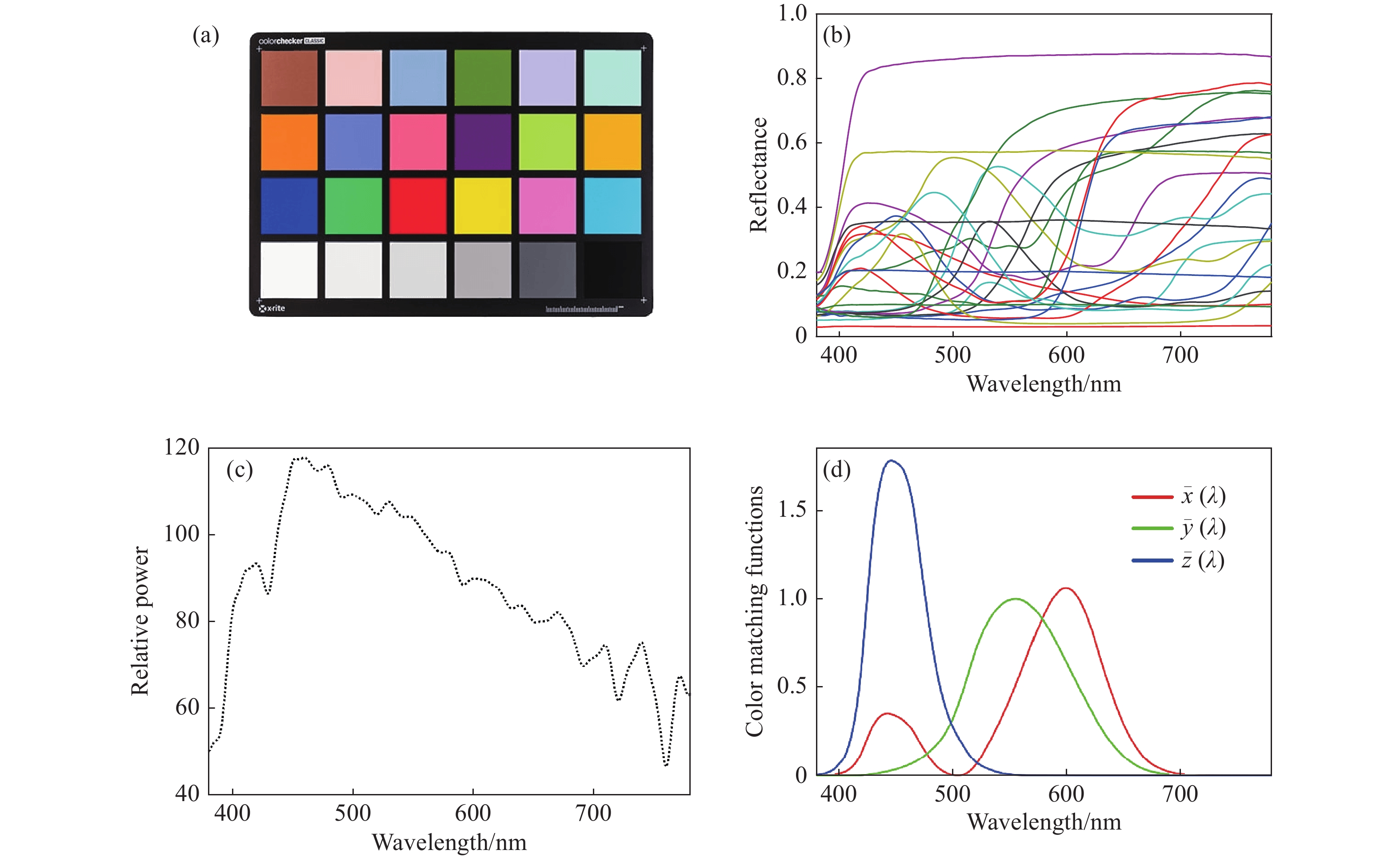
针对彩色数字相机高成像质量以及高色准的需求,本文研究了基于Philips棱镜的3CMOS相机的光学系统设计以及相机光谱优化方法。通过对Philips棱镜进行光路建模,优化了棱镜的结构参数。在保证全内反射以及出射窗口大小的条件下,减小了系统的体积,并由此设计了Philips棱镜3CMOS相机光学系统。其视场角为45°,相对孔径为1/2.8,在110 lp/mm的奈奎斯特采样频率下,系统的MTF全视场全波段均大于0.4。基于色度学基本原理建立了Philips棱镜相机的矢量成像模型,分析了由光线入射角度变化造成的薄膜光谱偏移,提出了宽光束下光谱偏移的修正模型。利用该模型设计并优化了相机中的4组光学薄膜。通过光路仿真实验以及色差分析,基于优化后的相机光学系统的平均色差降低了15.8%,像面颜色不均匀性降低了60%。结果表明:本文设计的光学系统拥有良好的成像质量,优化后的相机光谱实现了良好的颜色性能以及颜色均匀性。


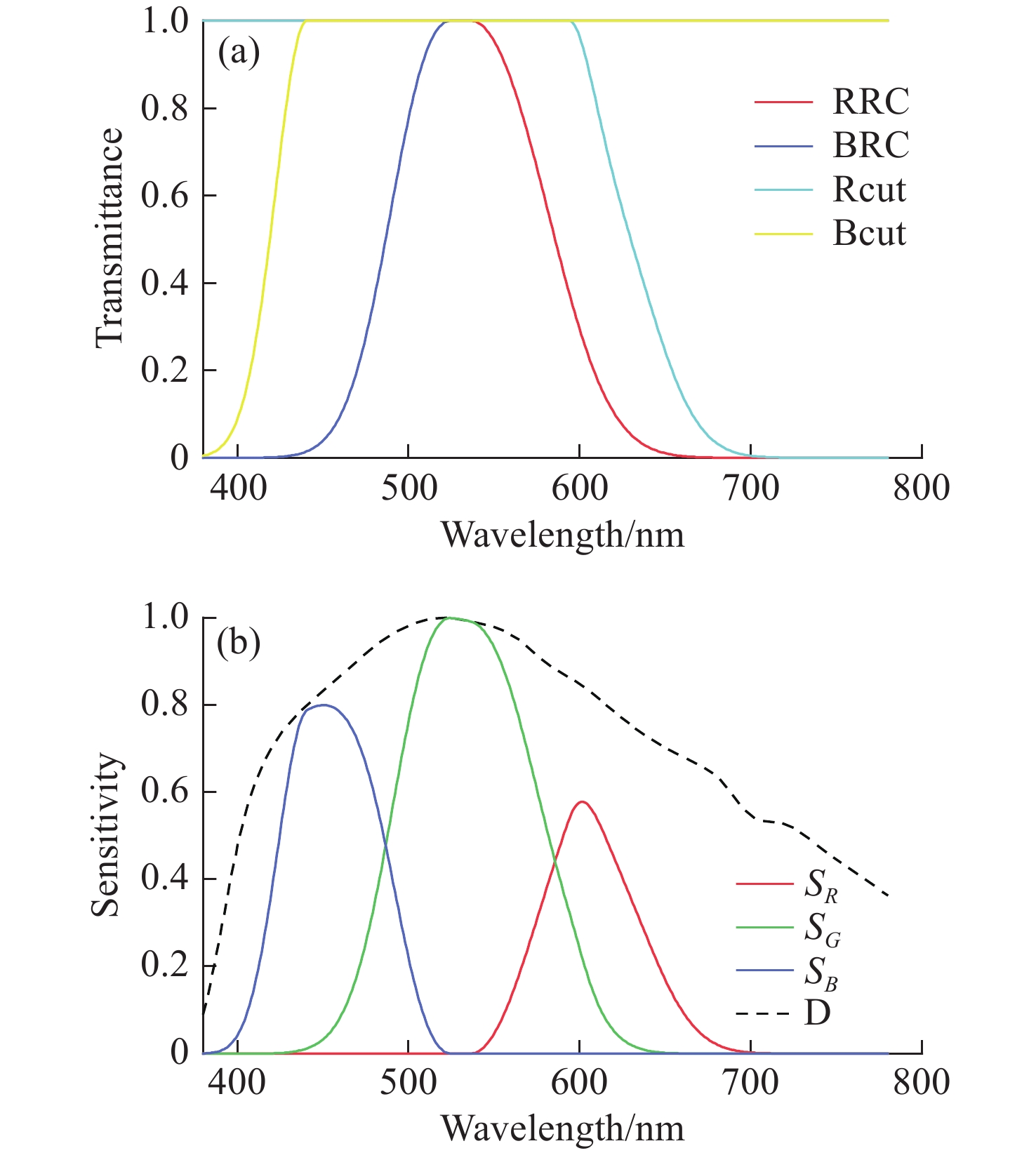
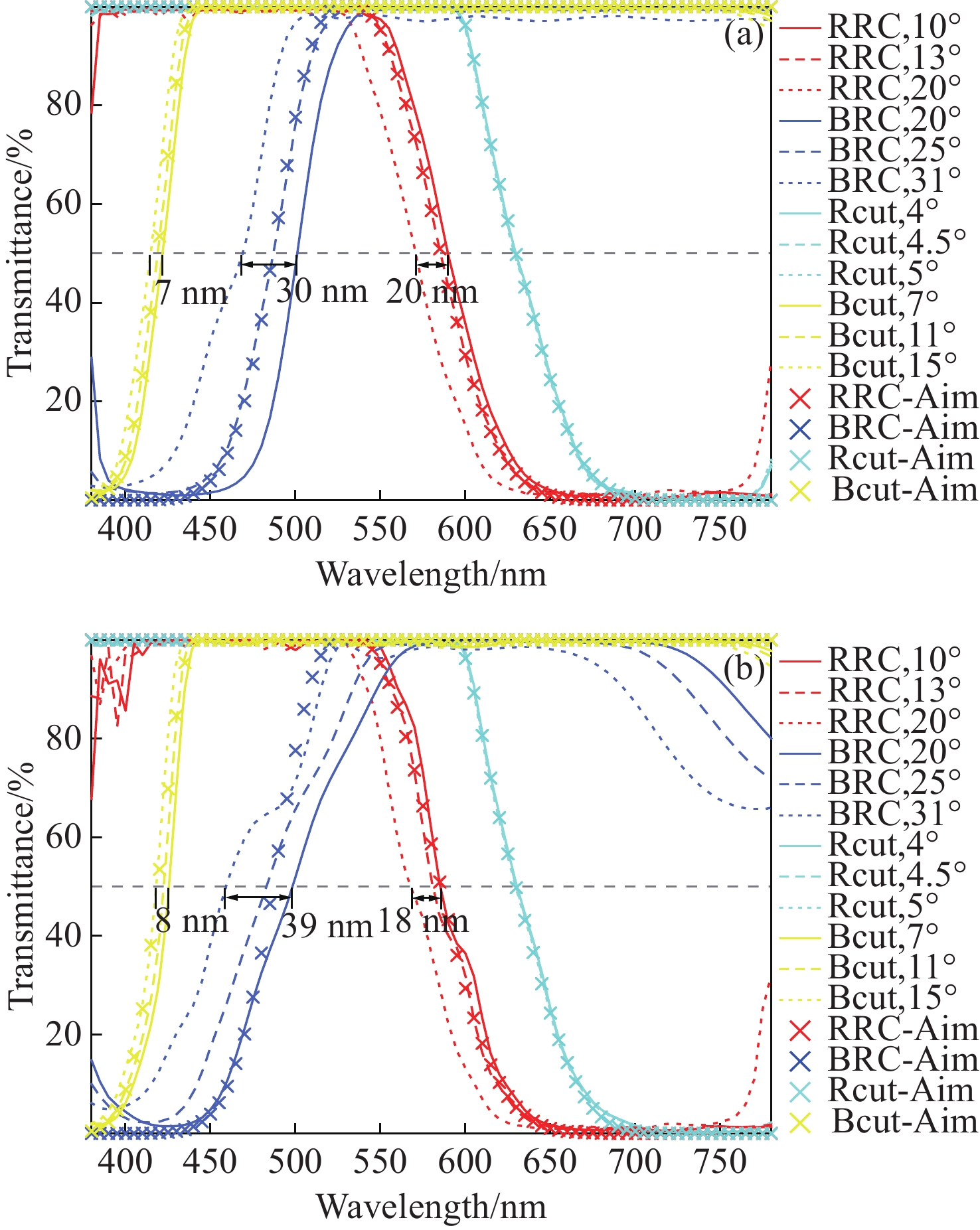
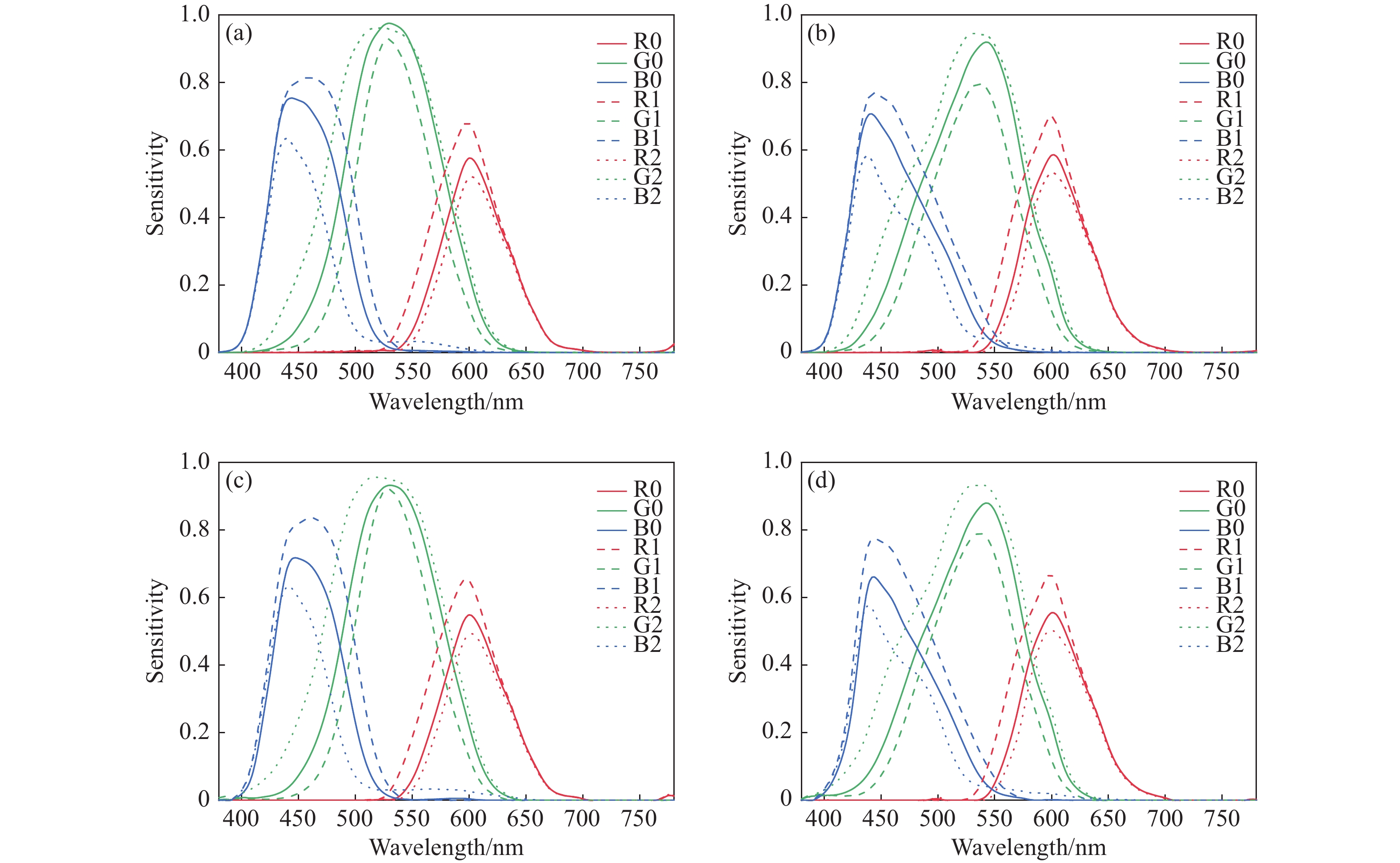
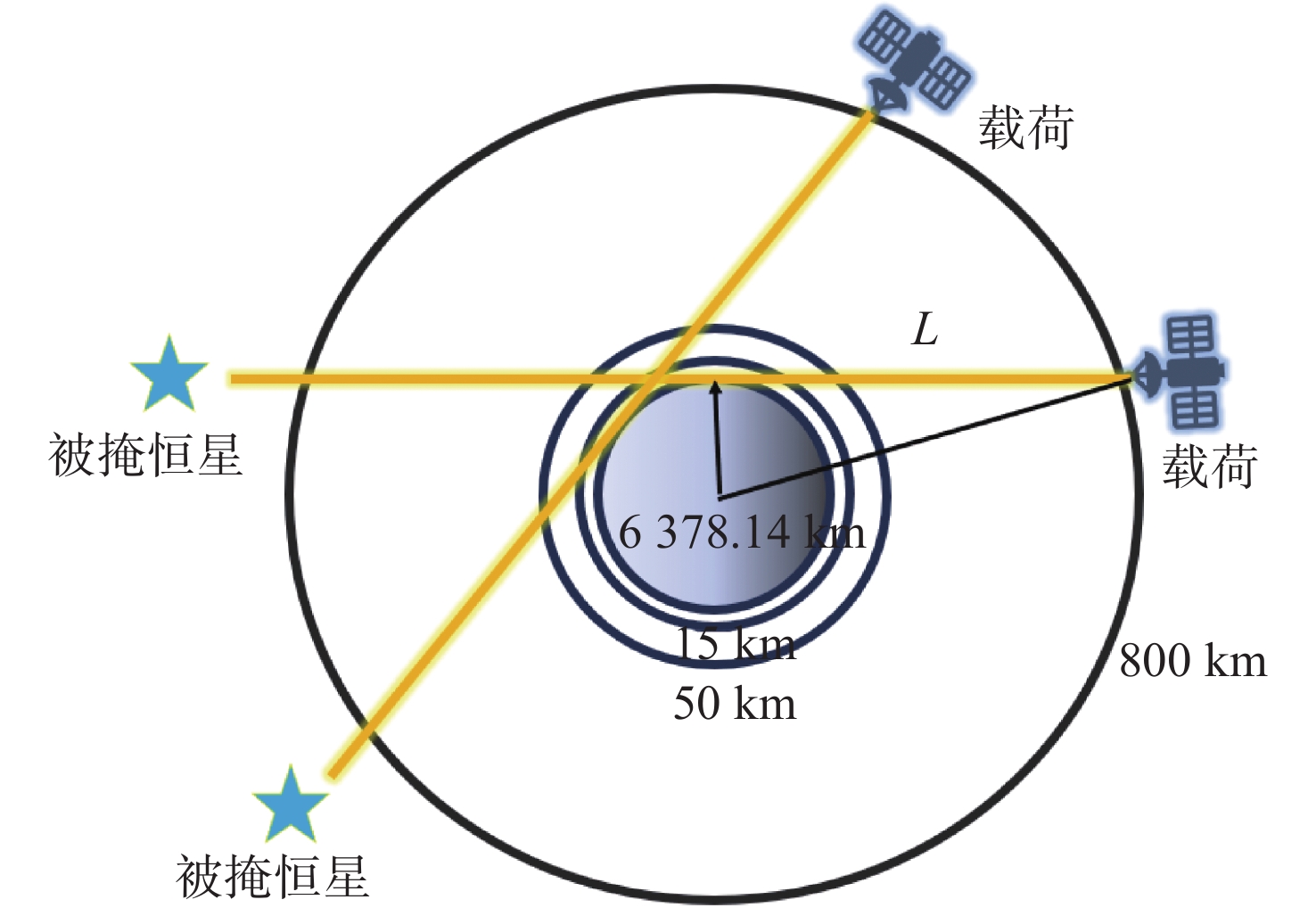
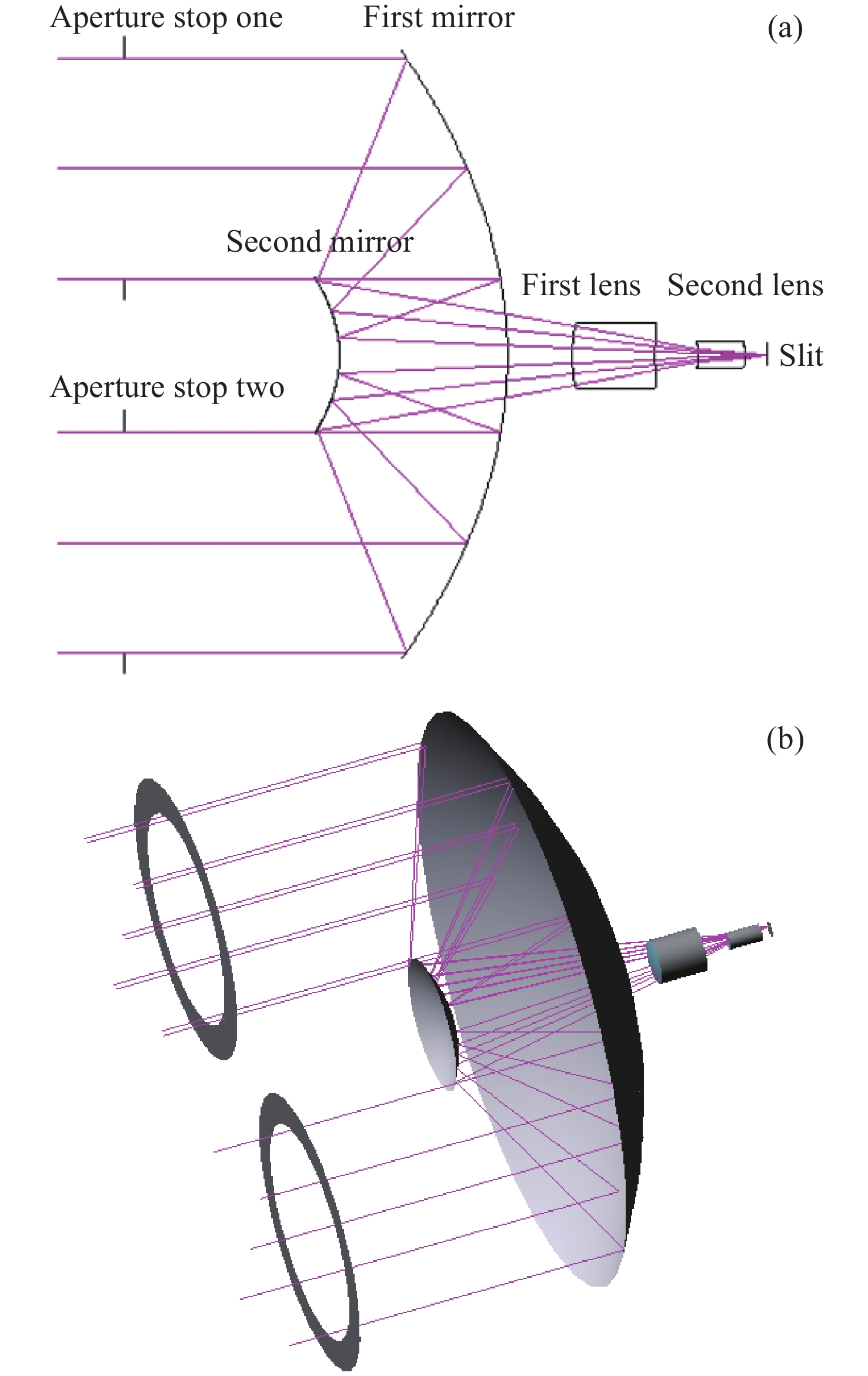
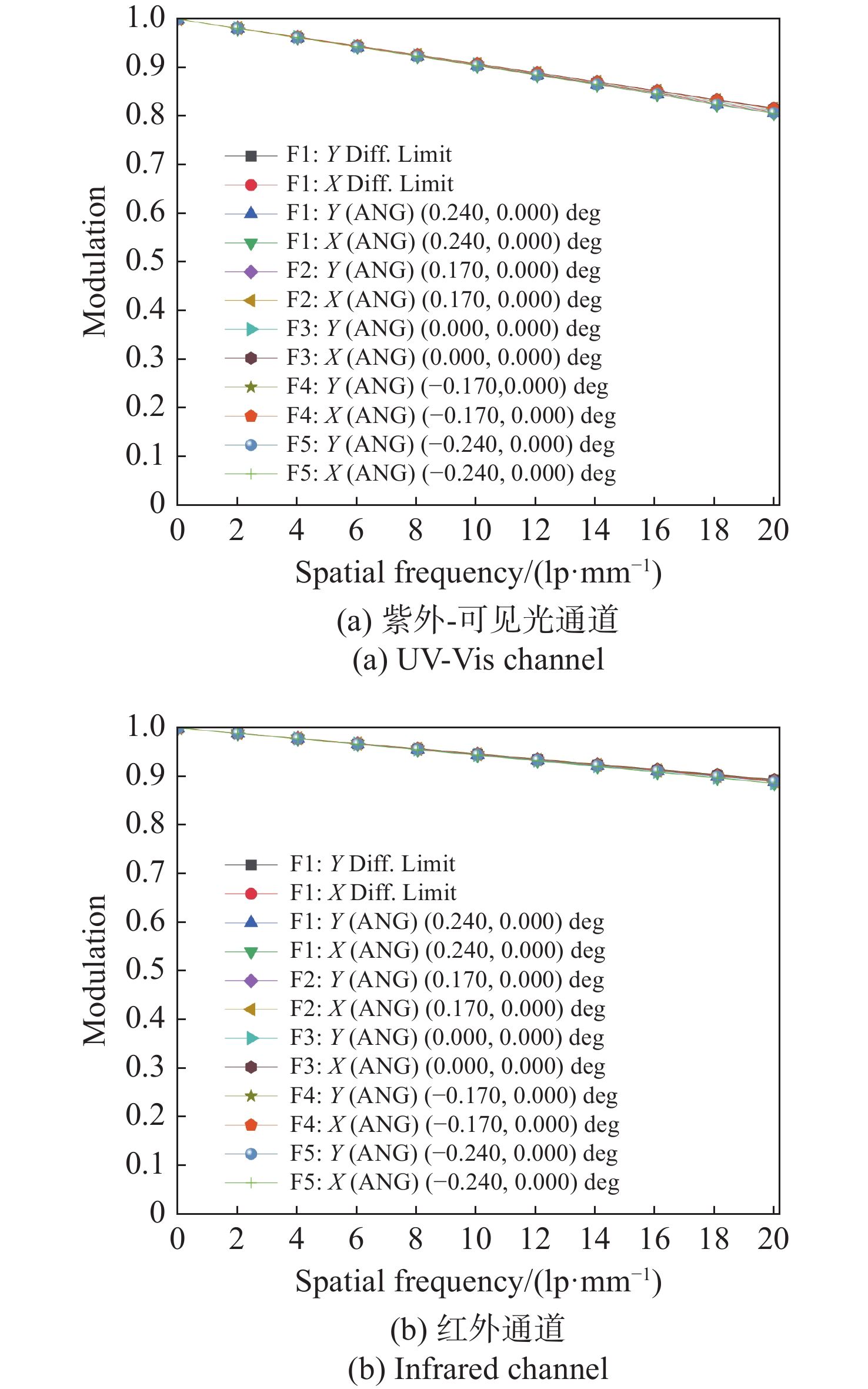
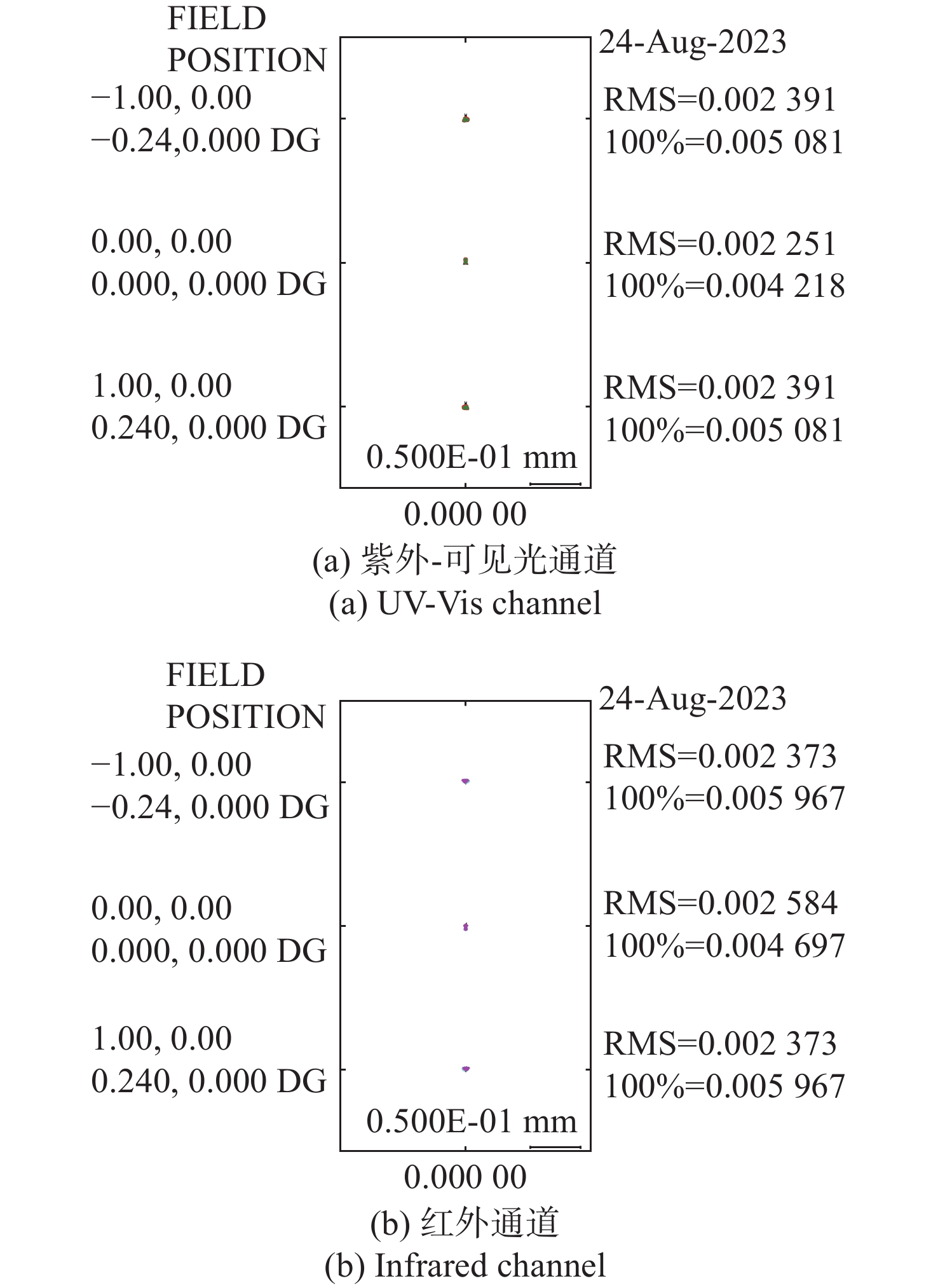
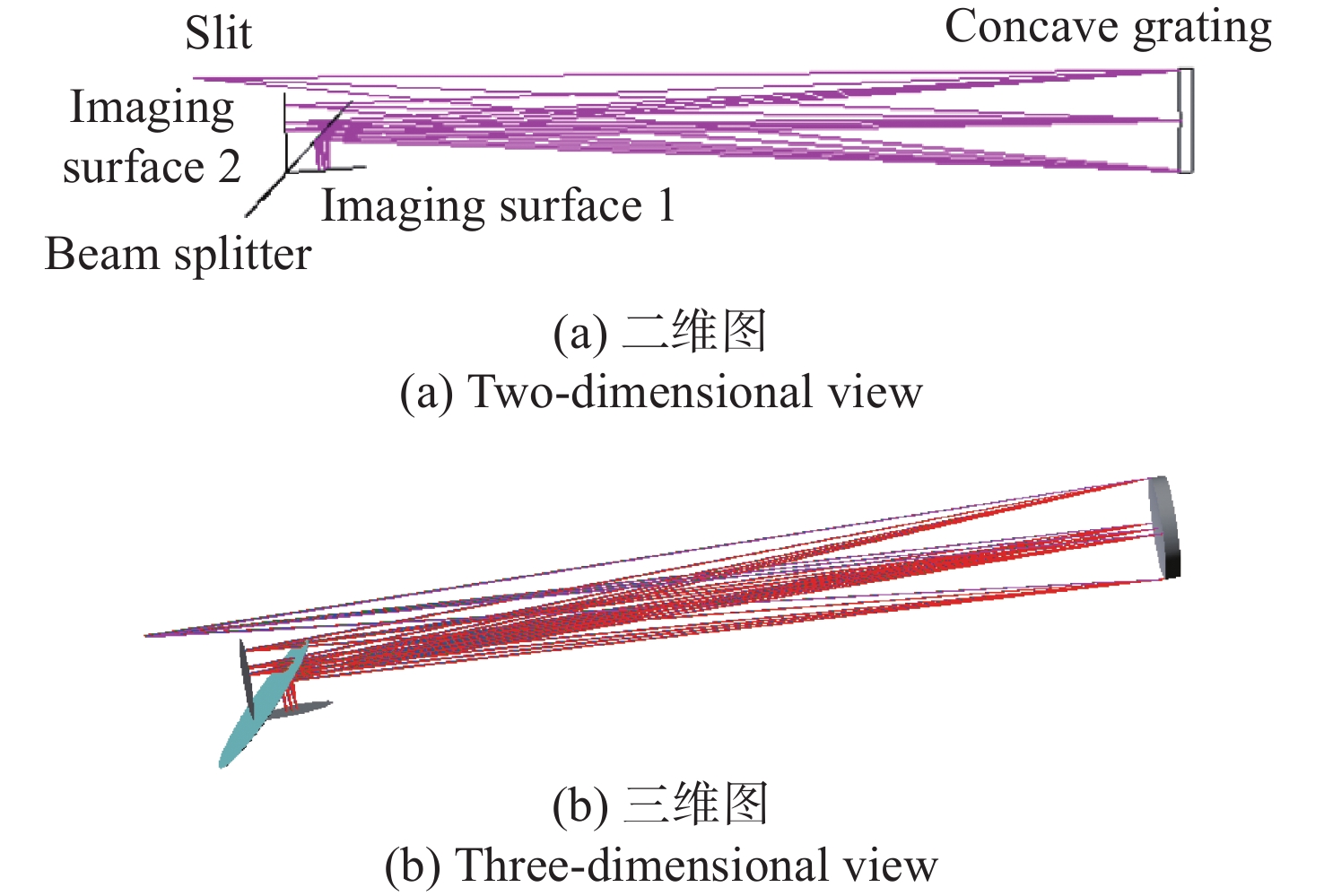
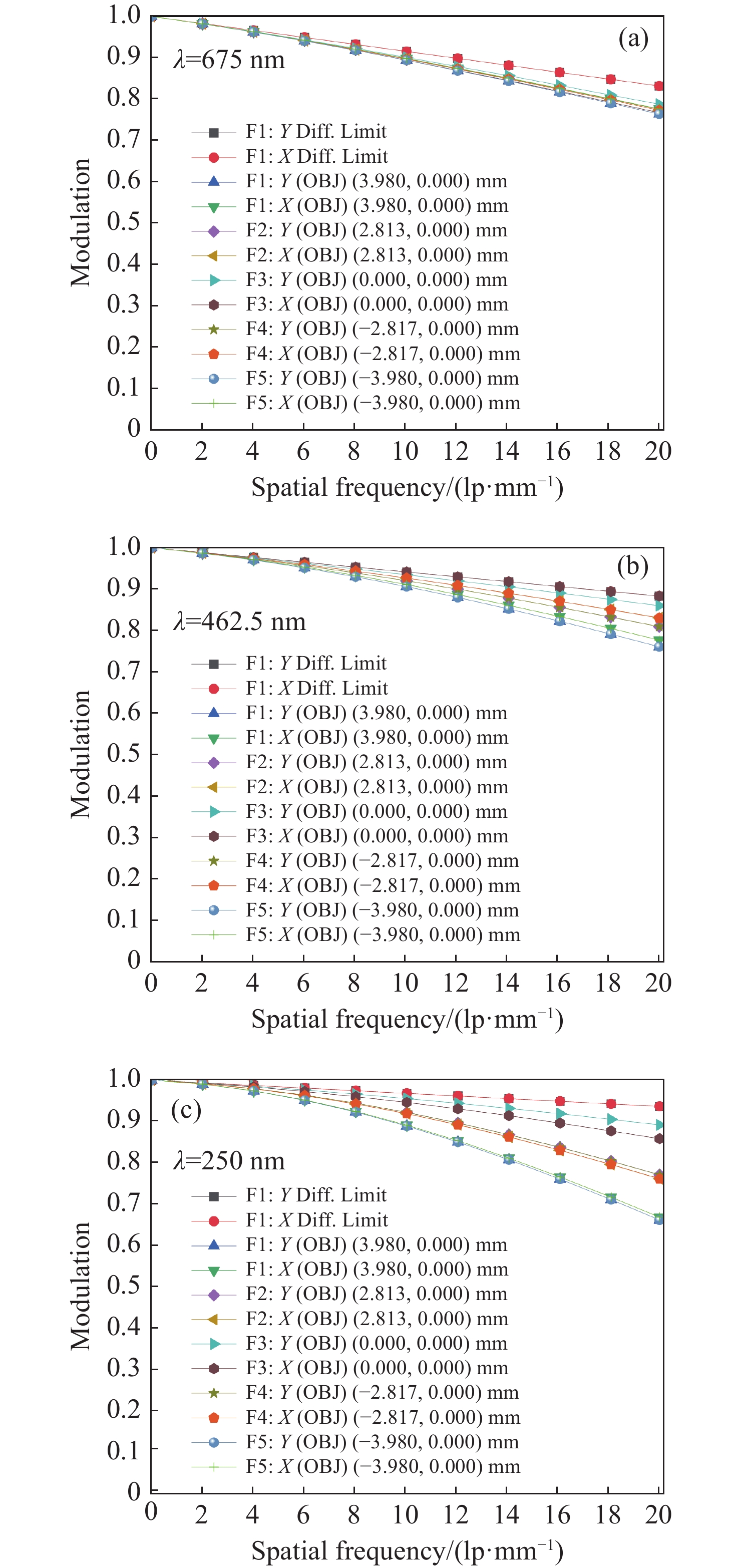
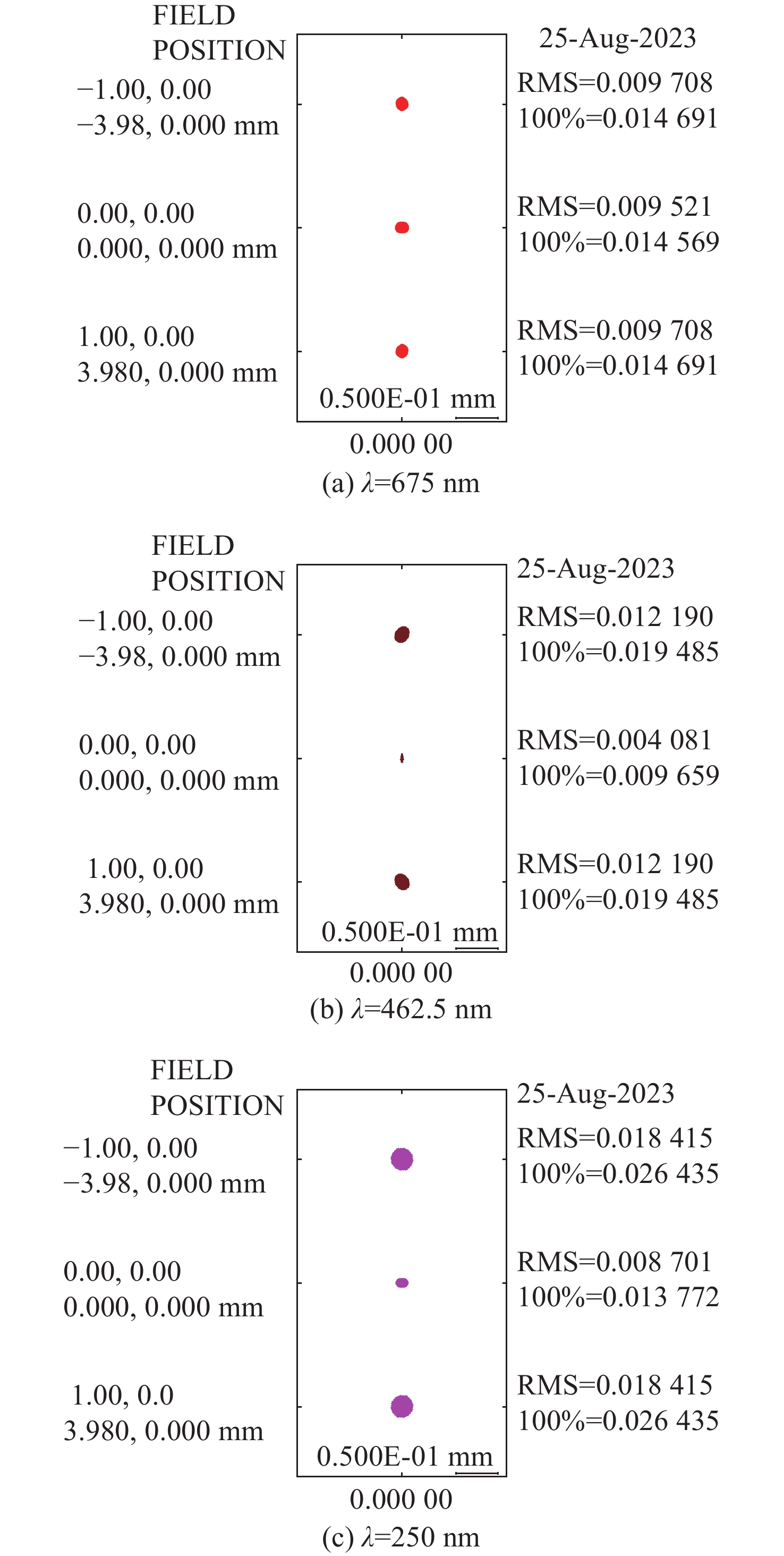
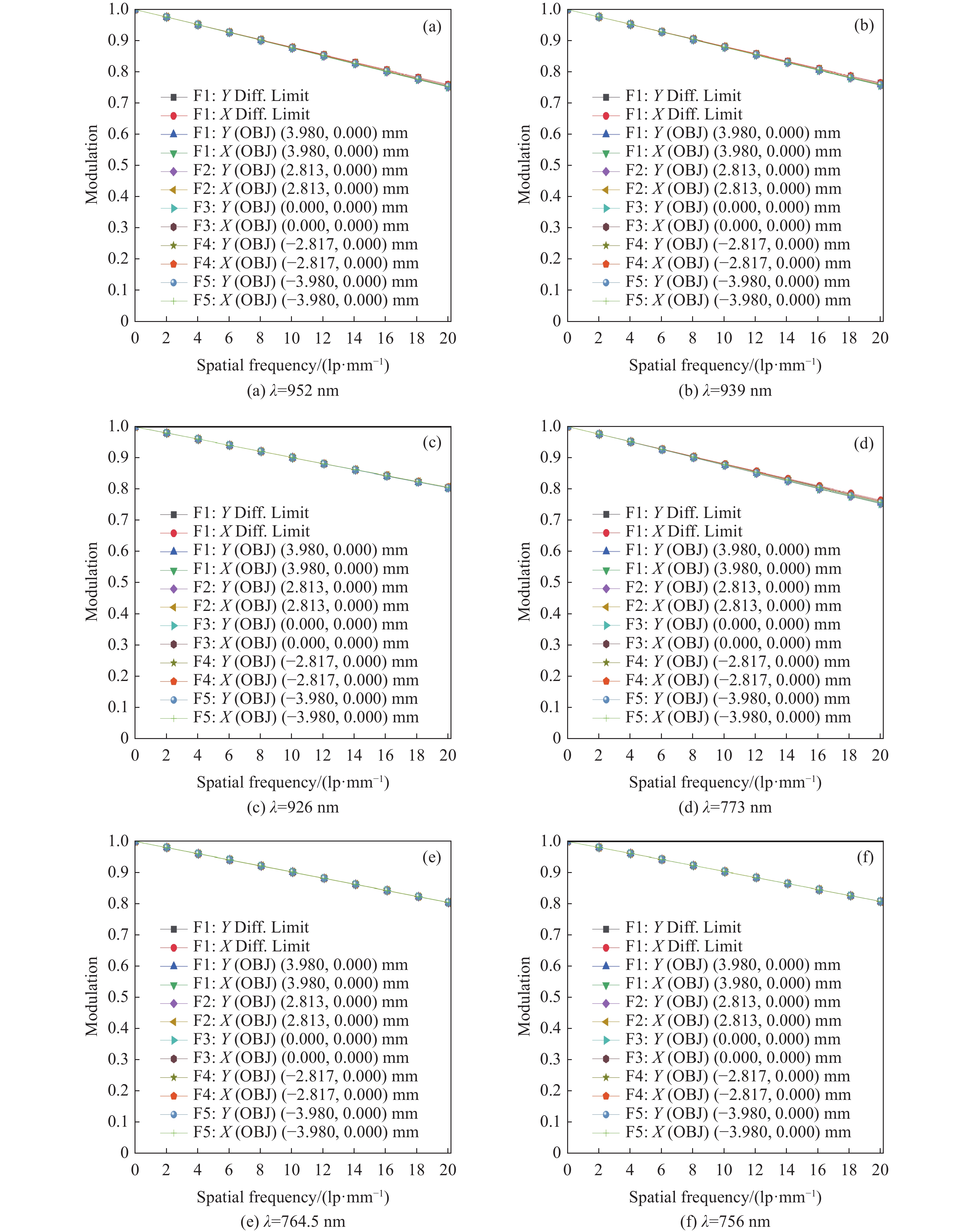
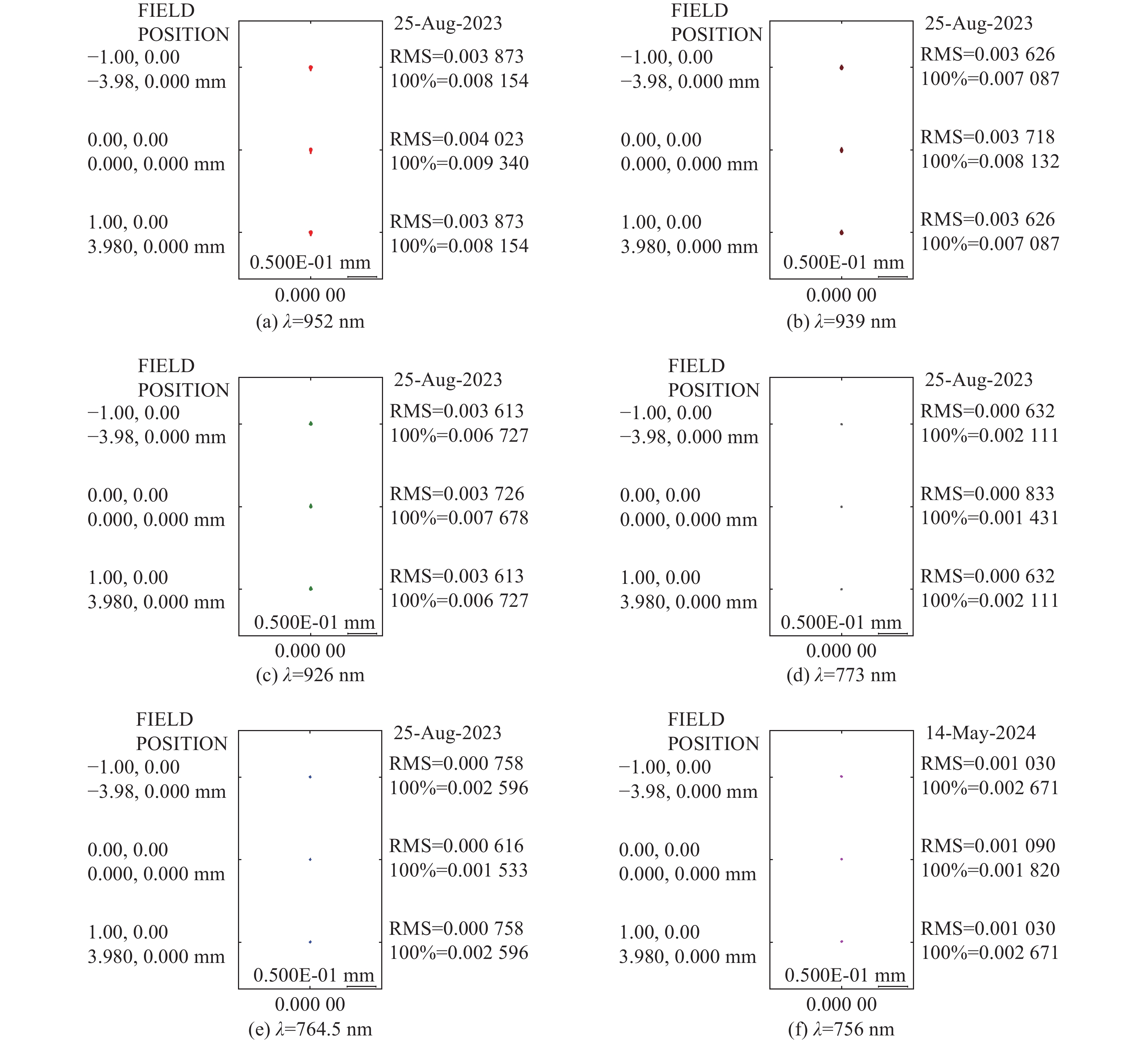
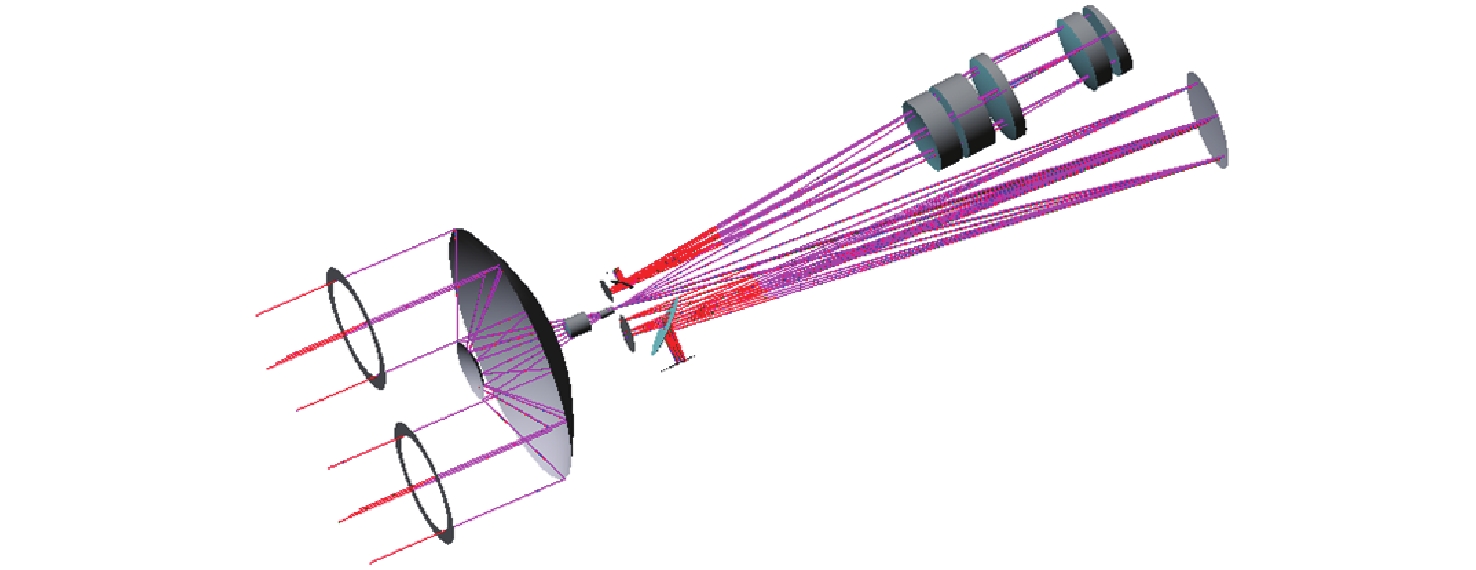
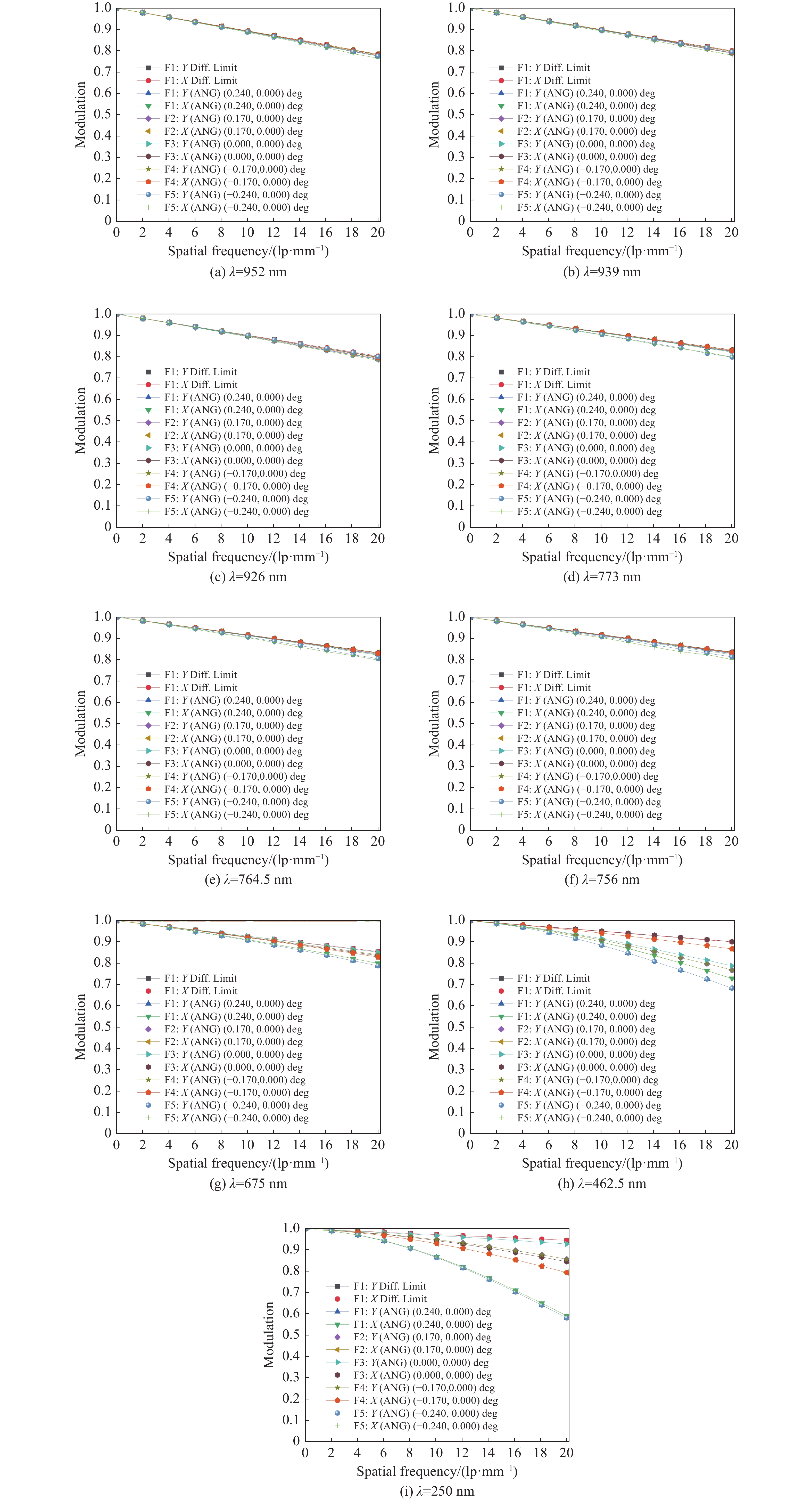
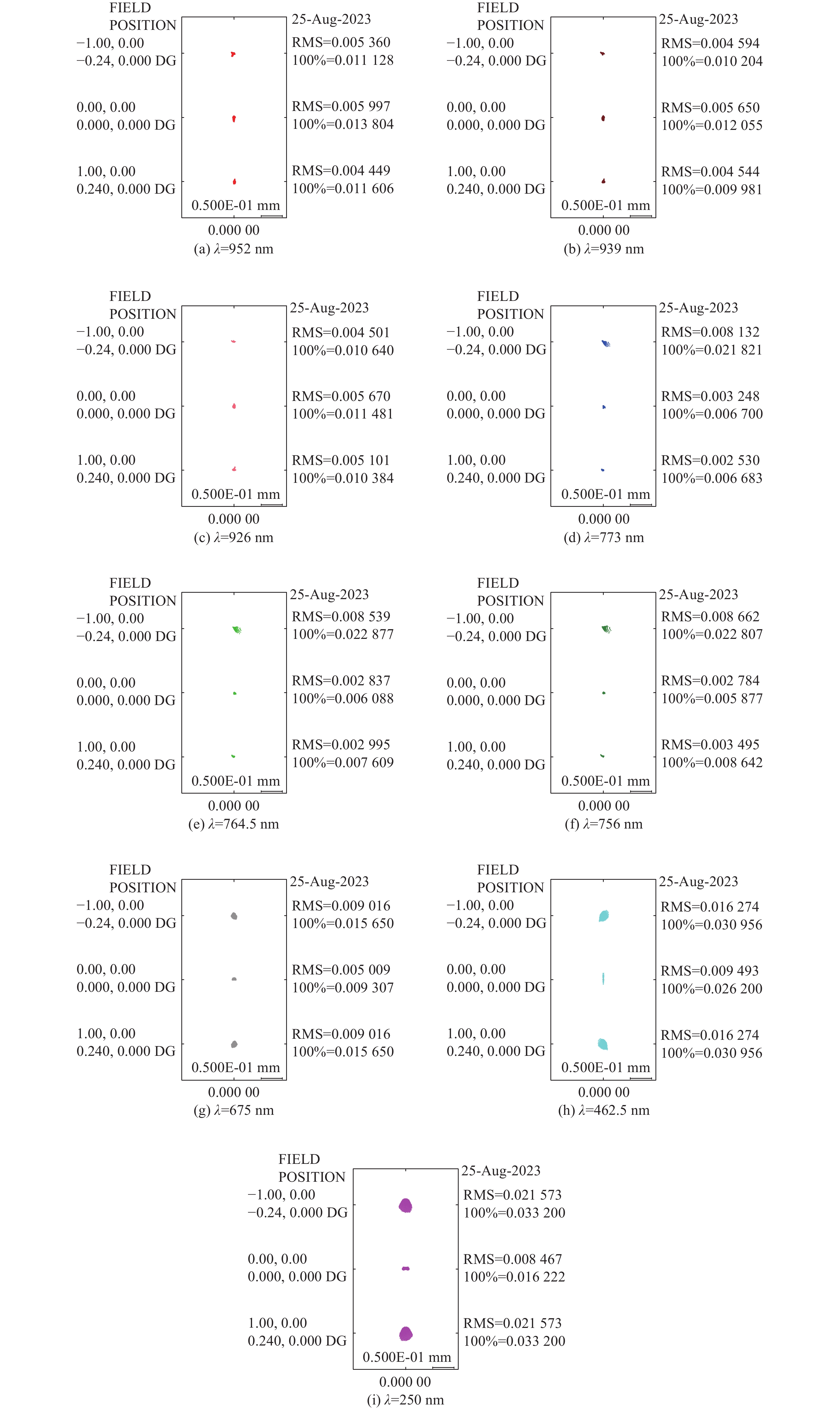
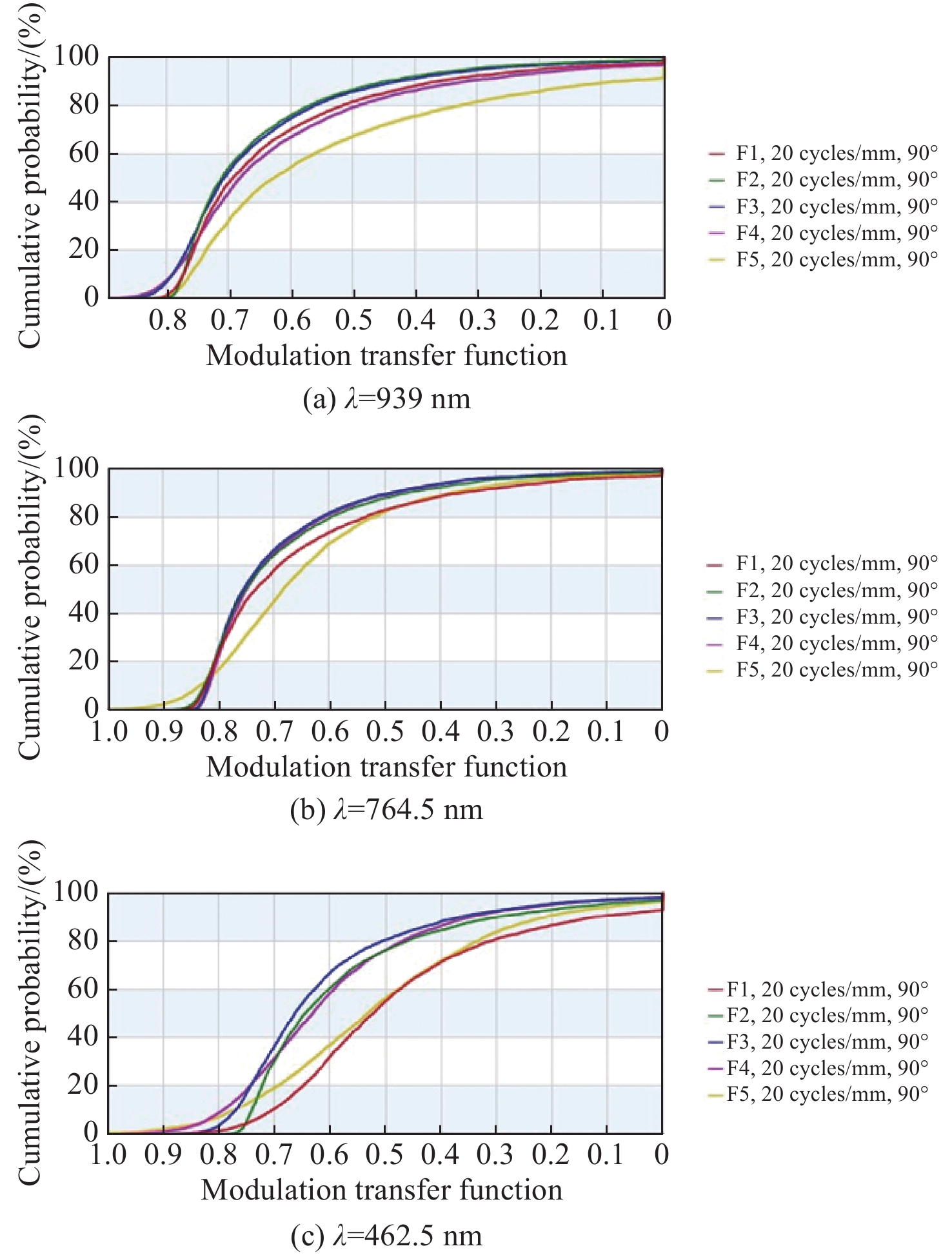
痕量气体作为大气的重要成份,对地球的生态起着重要作用。为了实现宽波段、高光谱全天时连续测量,本文设计了一款在掩星探测模式下工作的高光谱成像光谱仪。该系统为共狭缝的双通道结构,紫外-可见光通道采用单凹面光栅结构、红外通道采用利特罗与浸没光栅结合结构,有效地减小了体积。利用软件对光学结构进行优化,优化结果表明:光谱仪在250~952 nm波段范围内工作,其中紫外-可见光通道工作波段为250~675 nm、光谱分辨率优于1 nm、MTF在奈奎斯特频率为20 lp/mm处均高于0.58、全视场各波长处RMS值均小于21 μm;红外通道工作波段为756~952 nm、光谱分辨率优于0.2 nm、MTF在奈奎斯特频率为20 lp/mm处均高于0.76、全视场各波长处RMS值均小于6 μm,均满足设计要求。结果表明该高光谱成像光谱仪系统可以实现对痕量气体的掩星探测。

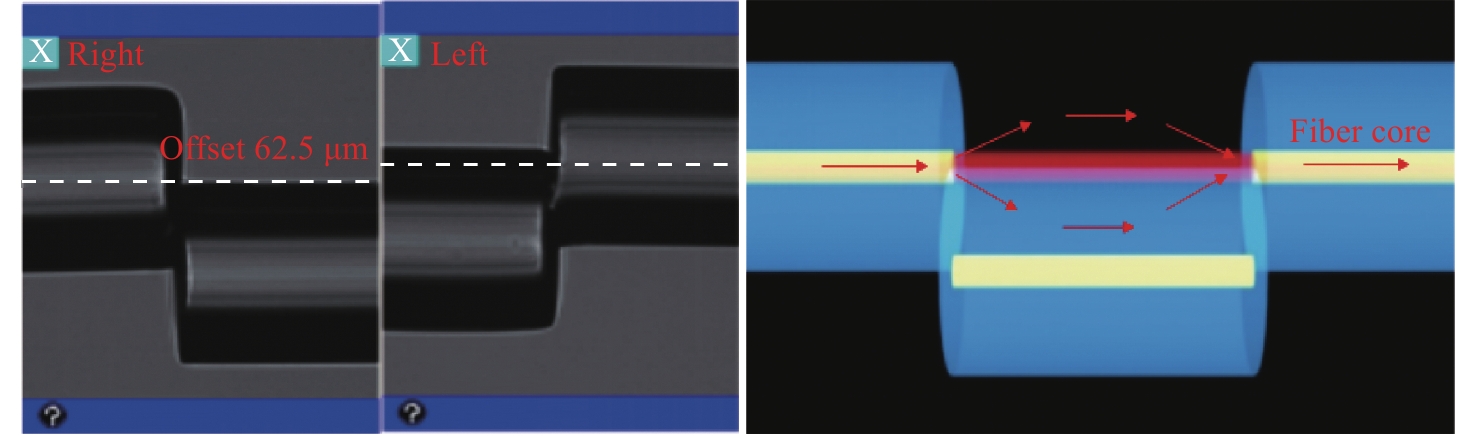
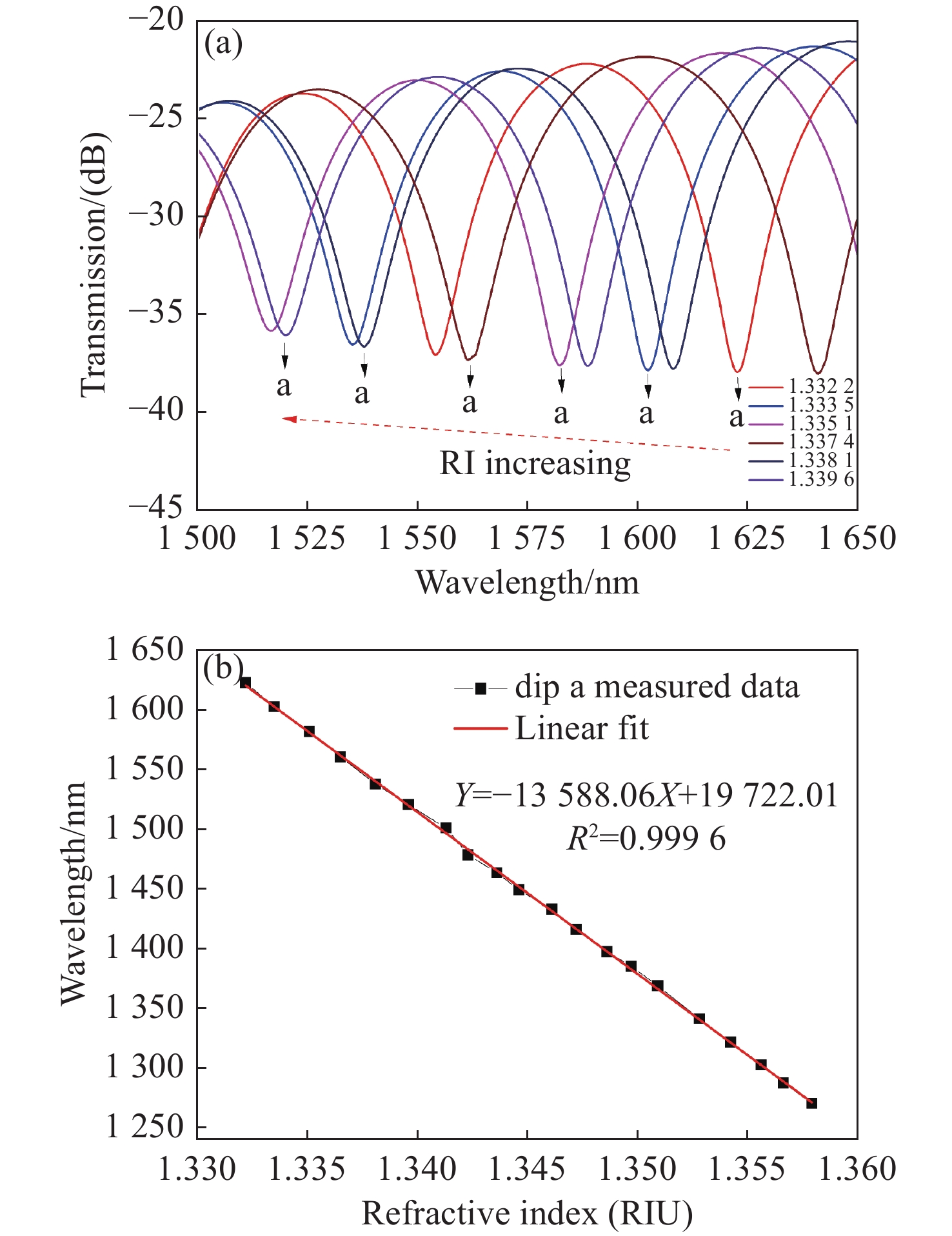
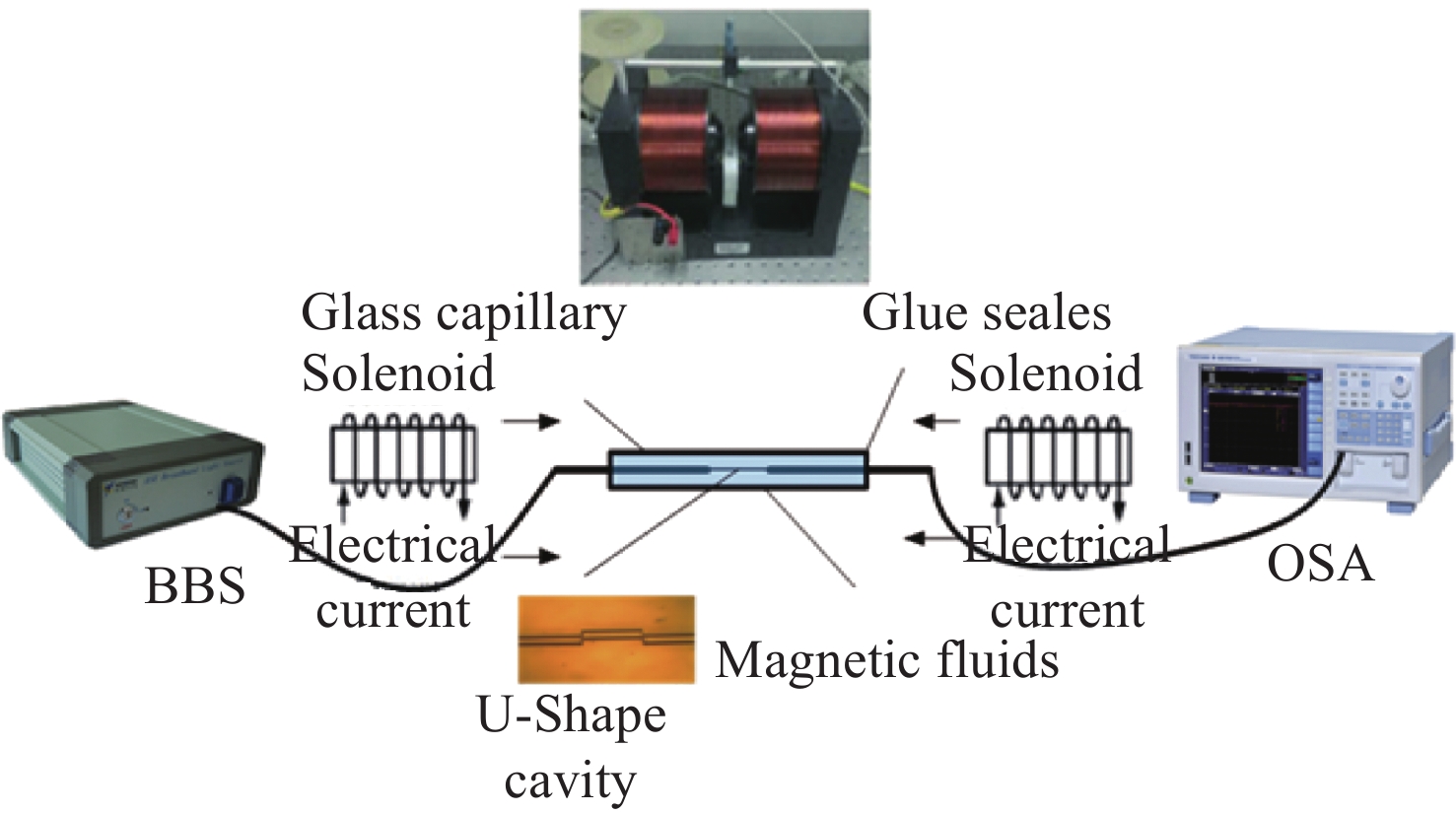
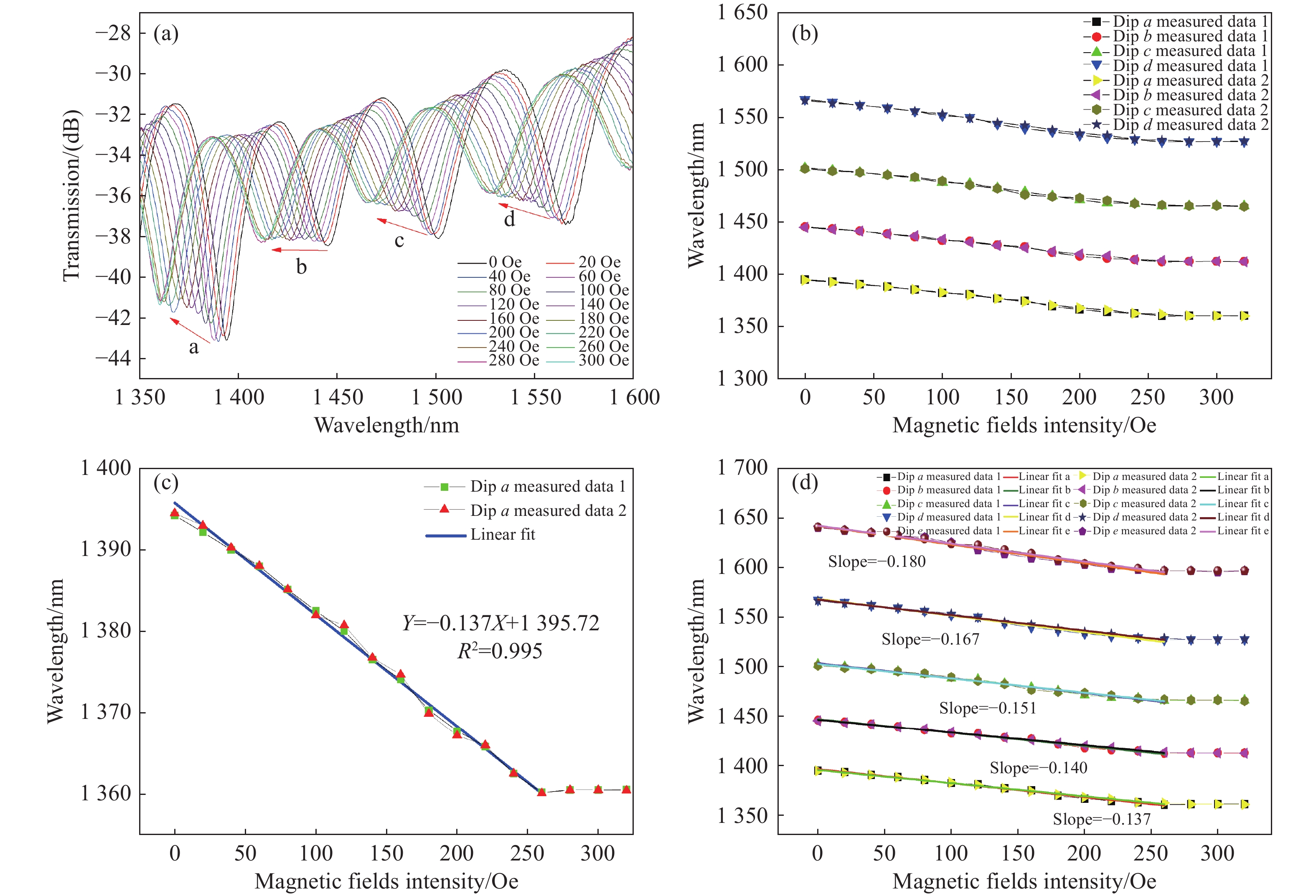
本文研制了一种光纤磁场传感器,使用涂有磁流体(MF)的全光纤马赫-曾德尔干涉仪(MZI)的U形腔体进行实验验证。光纤磁场传感器是在两段单模光纤(SMF)之间拼接一段单模光纤形成U型光学腔制造而成的,该设计具有光纤几何关系。由于几何对称性MZI对周围折射率(RI)具有很强的敏感性,灵敏度高达−13588 nm/RIU,且磁流体的折射率对磁场敏感,因此所提结构实现了磁场传感功能。实验结果表明,该传感器磁场灵敏度高达137 pm/Oe,磁场范围从0~250 Oe几乎呈线性。本文所设计的光纤磁场传感器具有体积小、成本低、易于制造、坚固耐用、灵敏度高、重复性好、易于与光纤系统集成等相关优势。

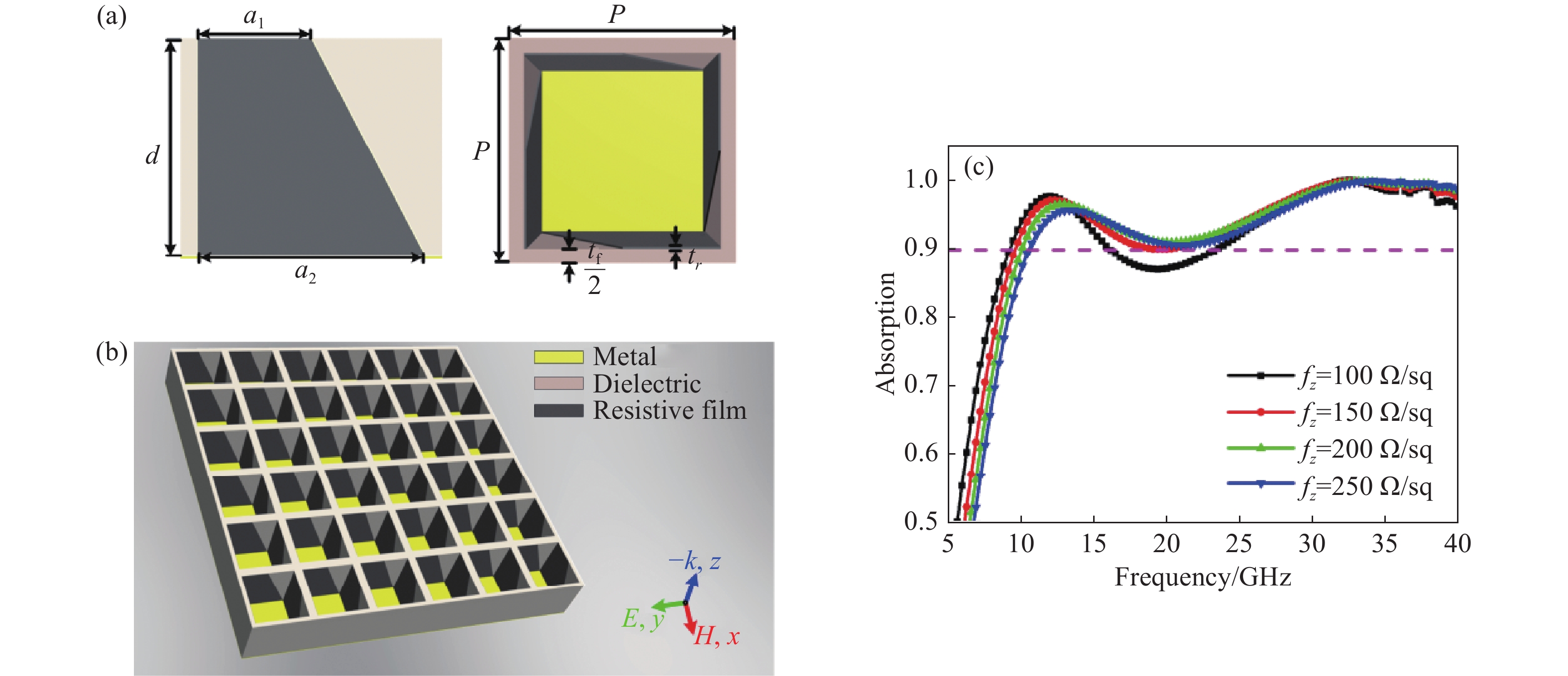
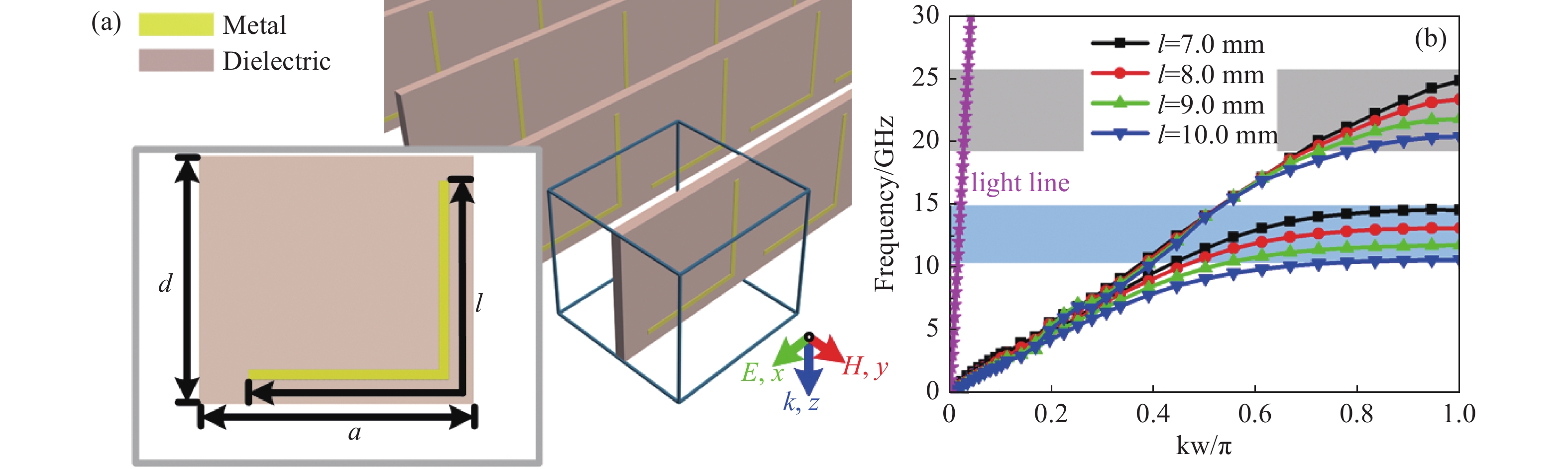
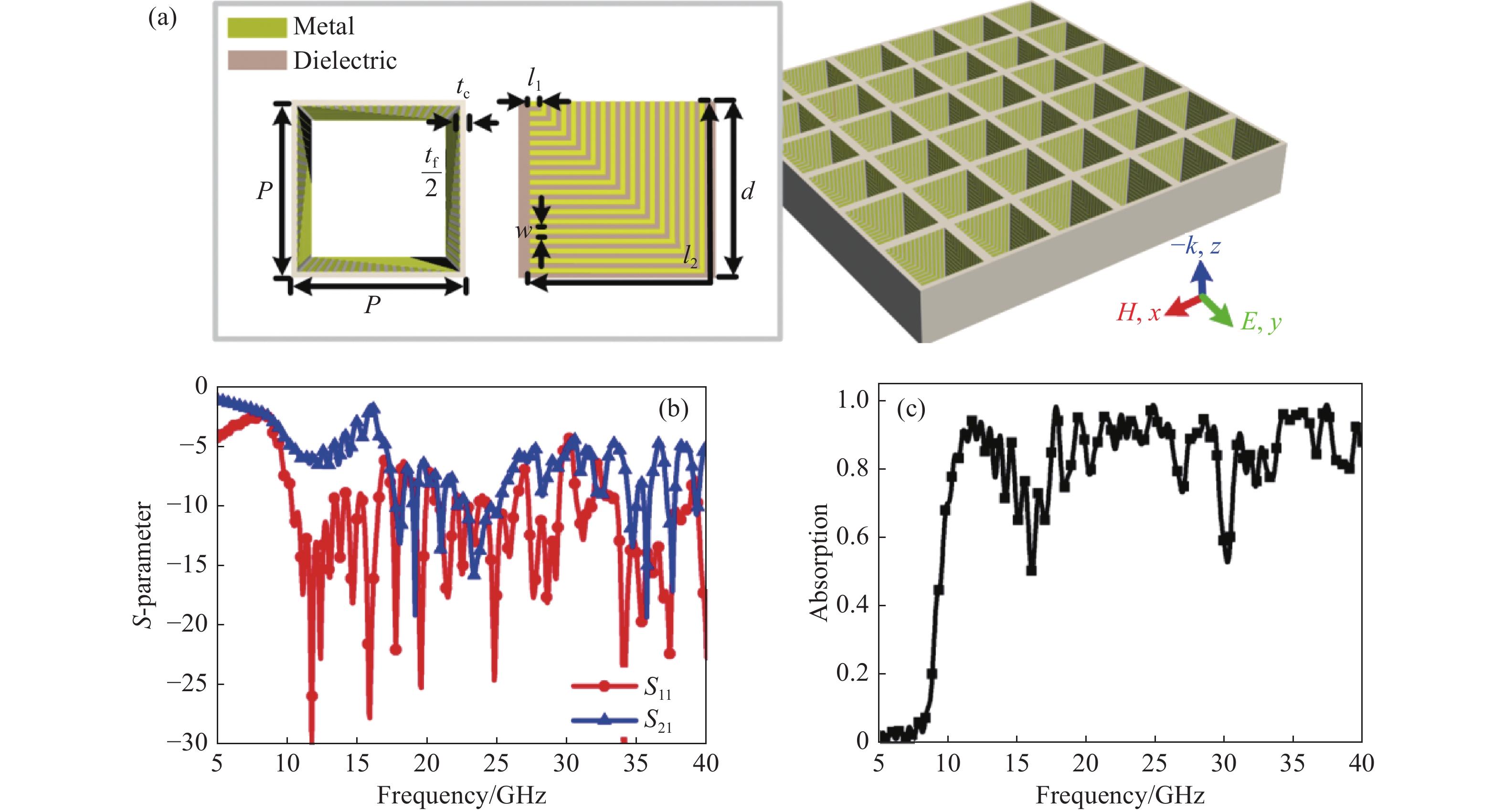
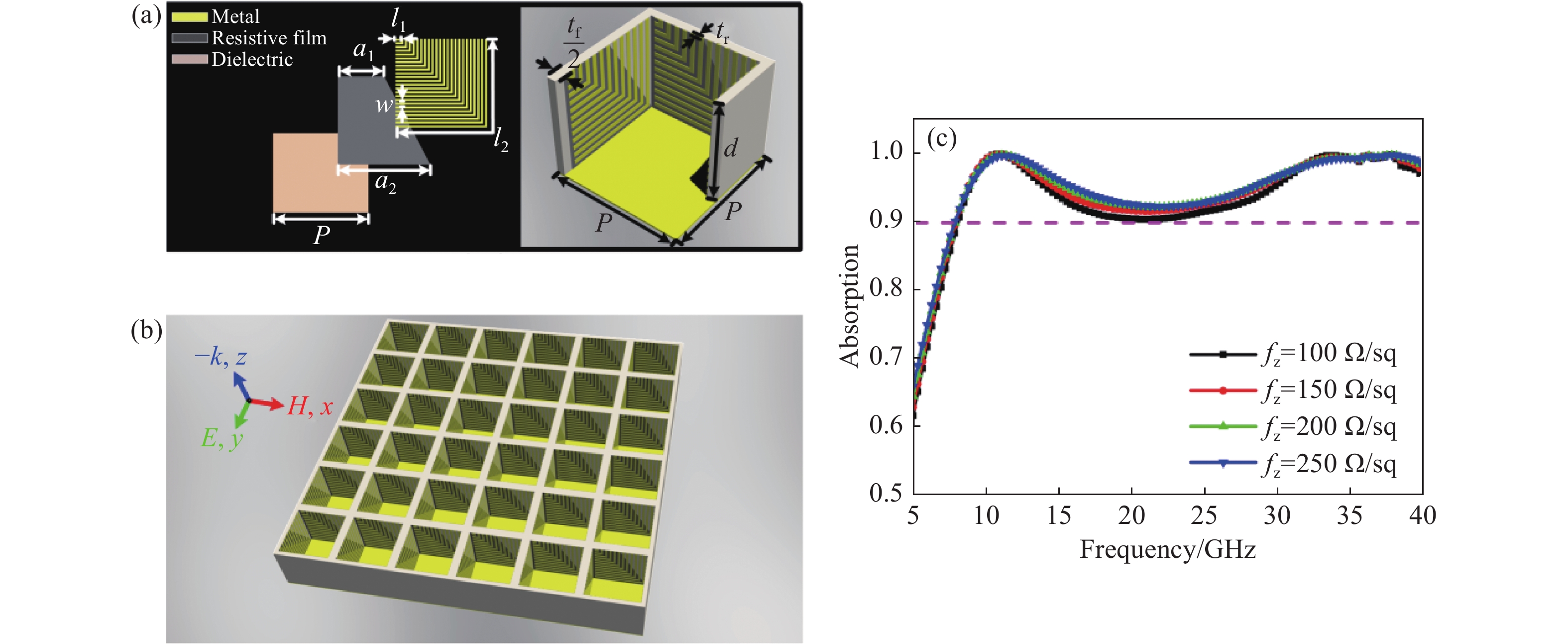
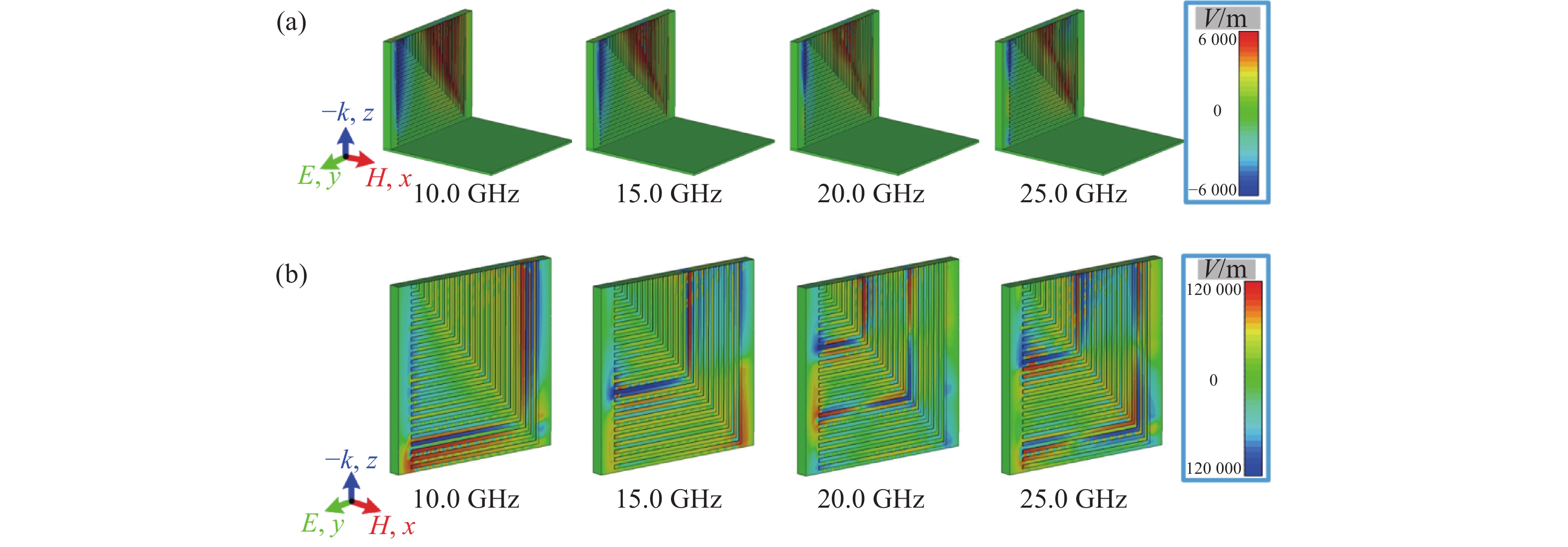
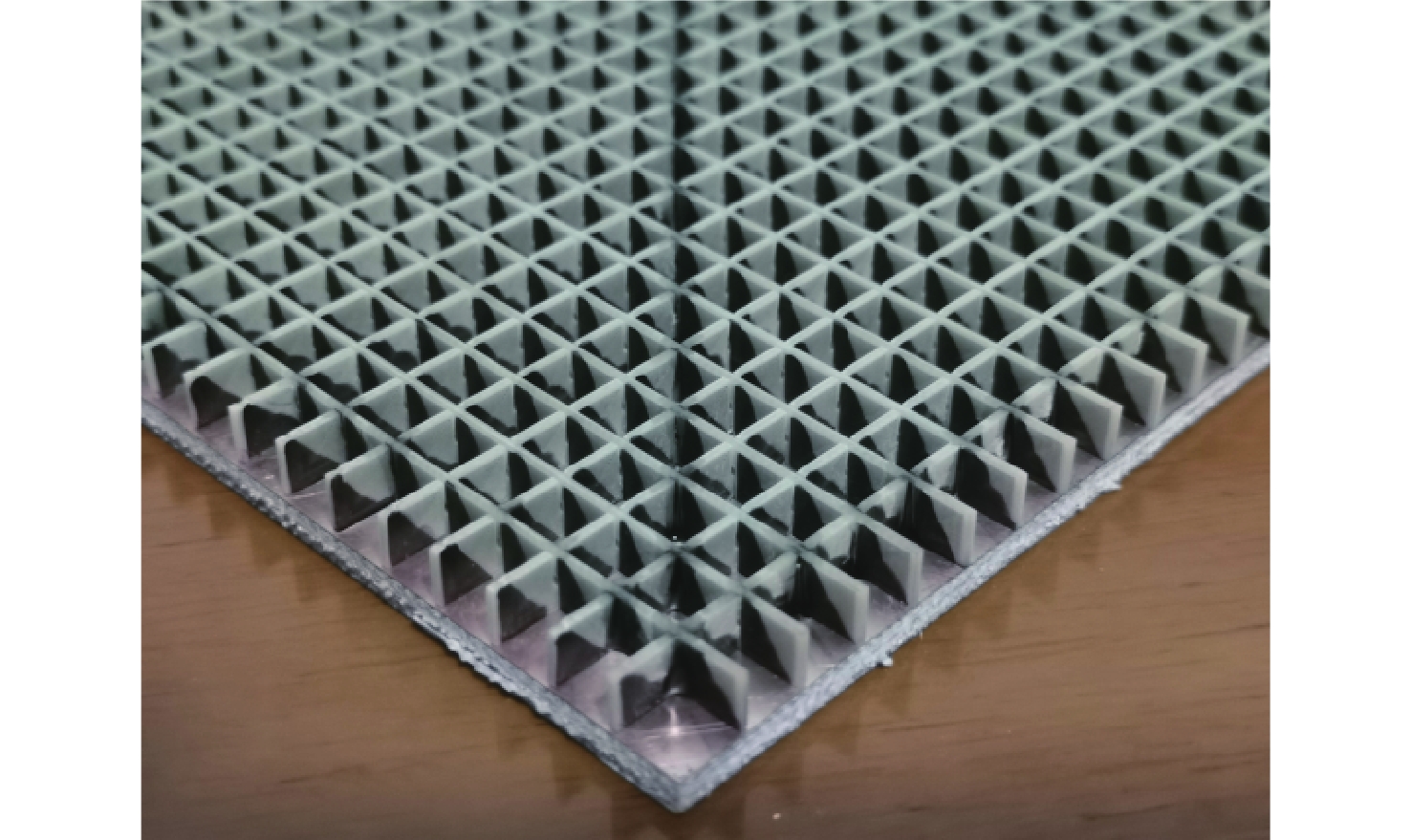
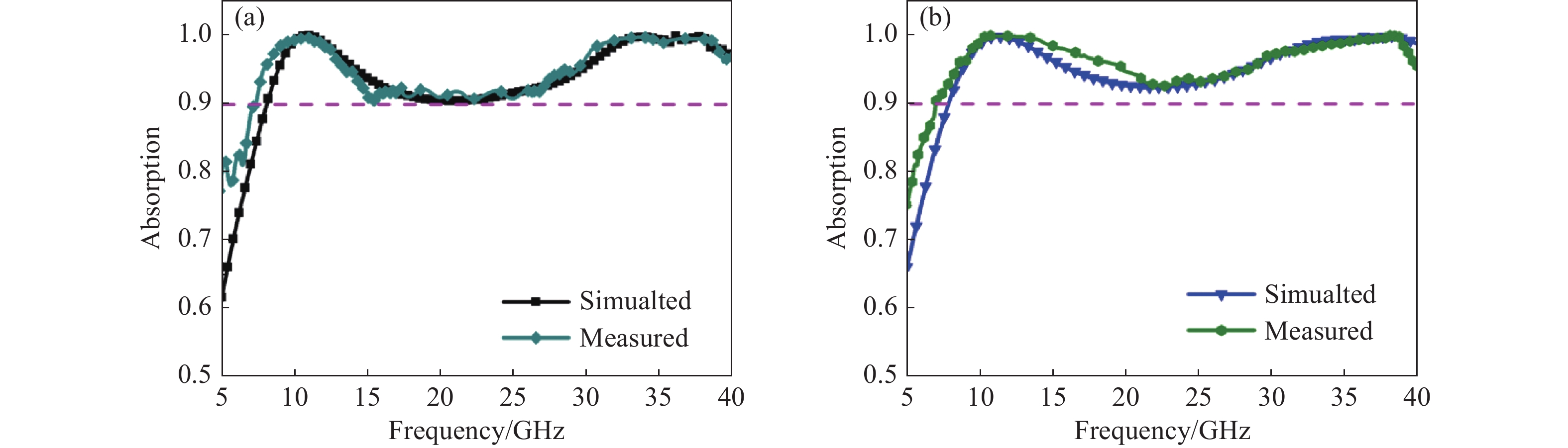
电阻型吸波结构具有优异的宽带电磁吸波性能,但电阻片方阻值对吸波结构宽带电磁吸波性能影响较大,且在样品制备过程中较难精确控制。本文通过在电阻型吸波结构表面加载周期性人工等离子结构,利用宽频带内激发的多重等离子谐振,实现高效宽带色散调控,进而获得电阻型吸波材料表面局域场增强效应,提升宽带电磁吸波的稳定性。仿真与试验结果表明,当电阻片方阻值在100~250 Ω/sq内变化时,该电阻型等离子吸波结构在7.8~40.0 GHz频段内的吸收效率高于90%以上,具有连续宽带电磁吸波能力。该设计方案提供了一种加载人工等离子结构用于强化吸波超材料综合性能的设计思路,对复合型吸波超材料设计具有一定的启发。
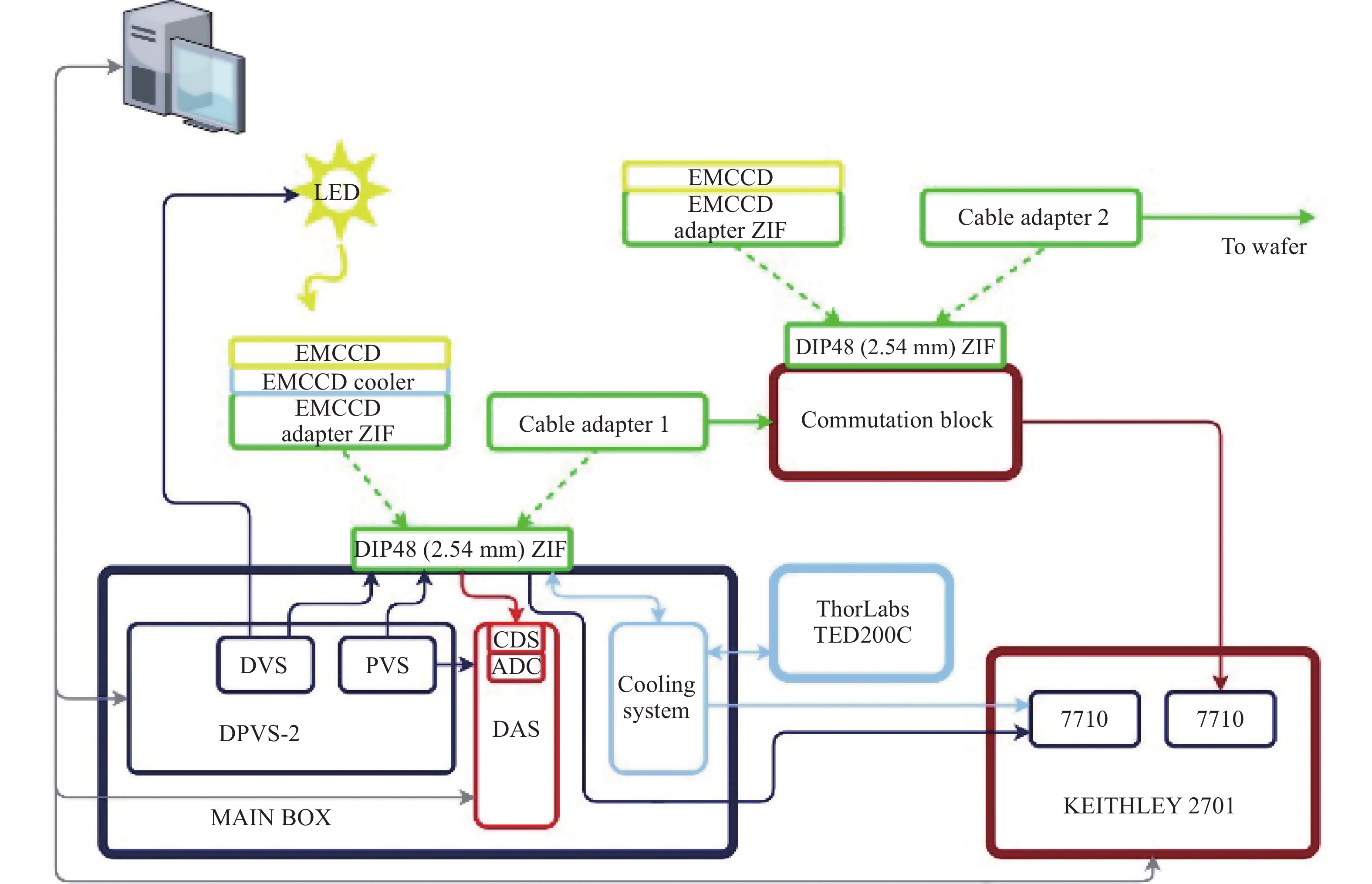
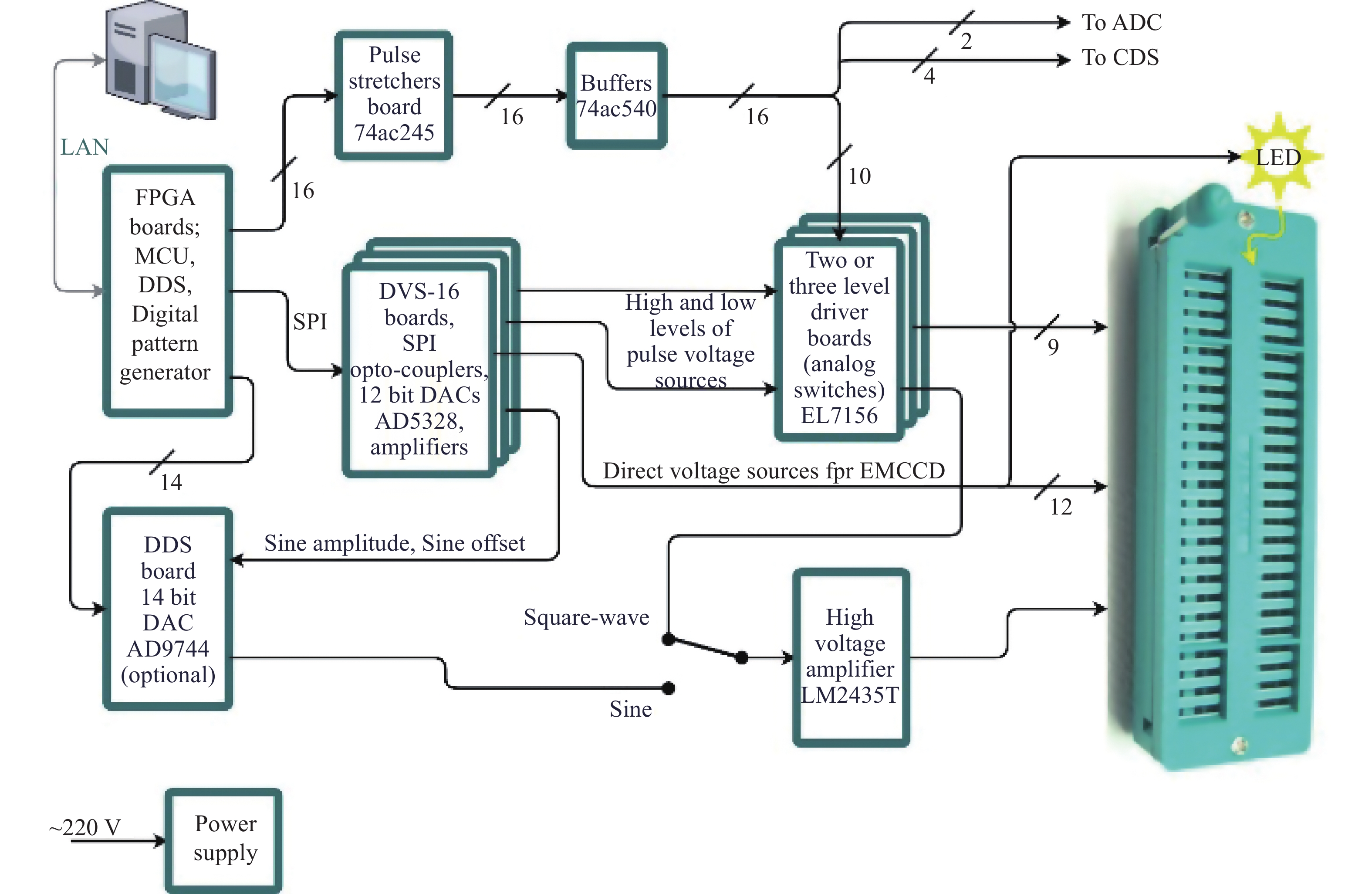
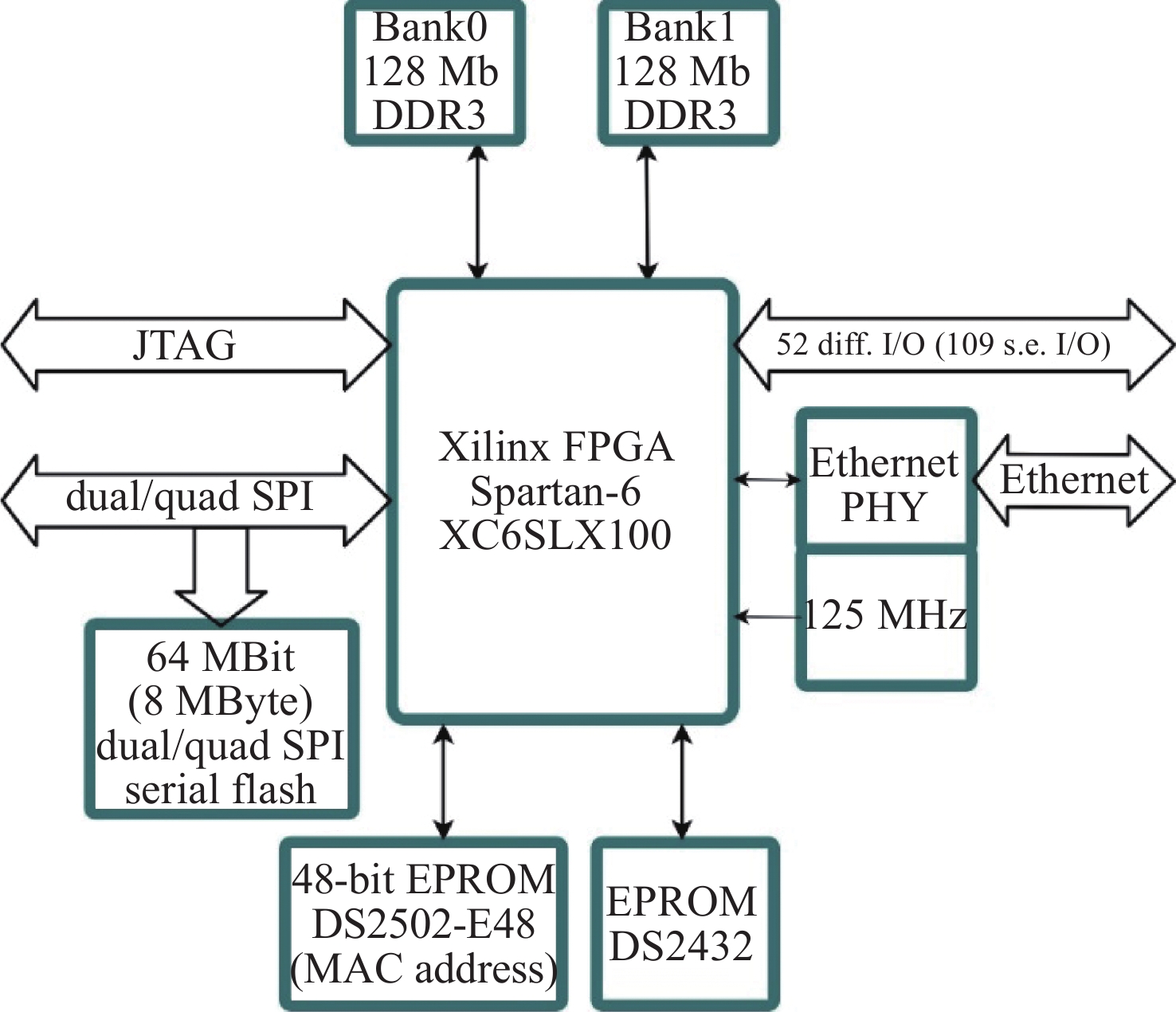
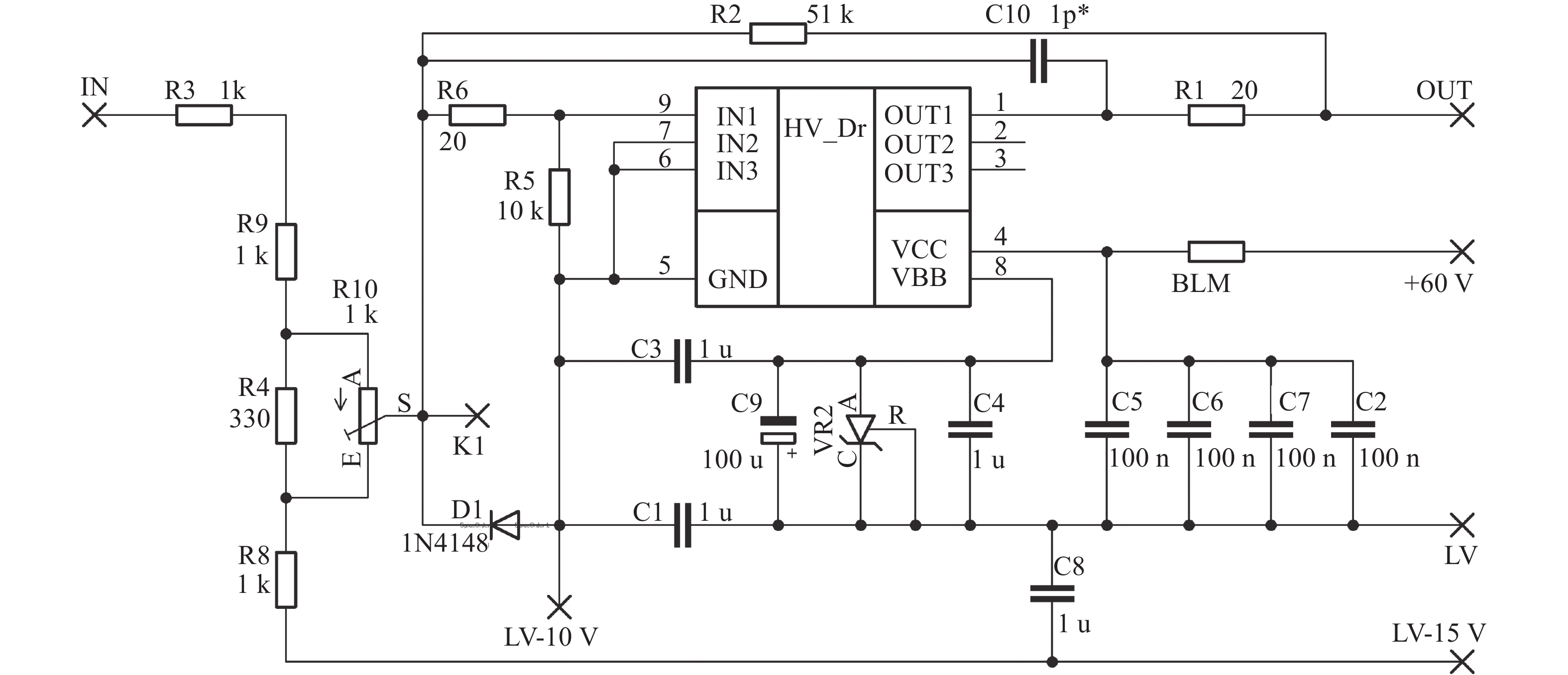
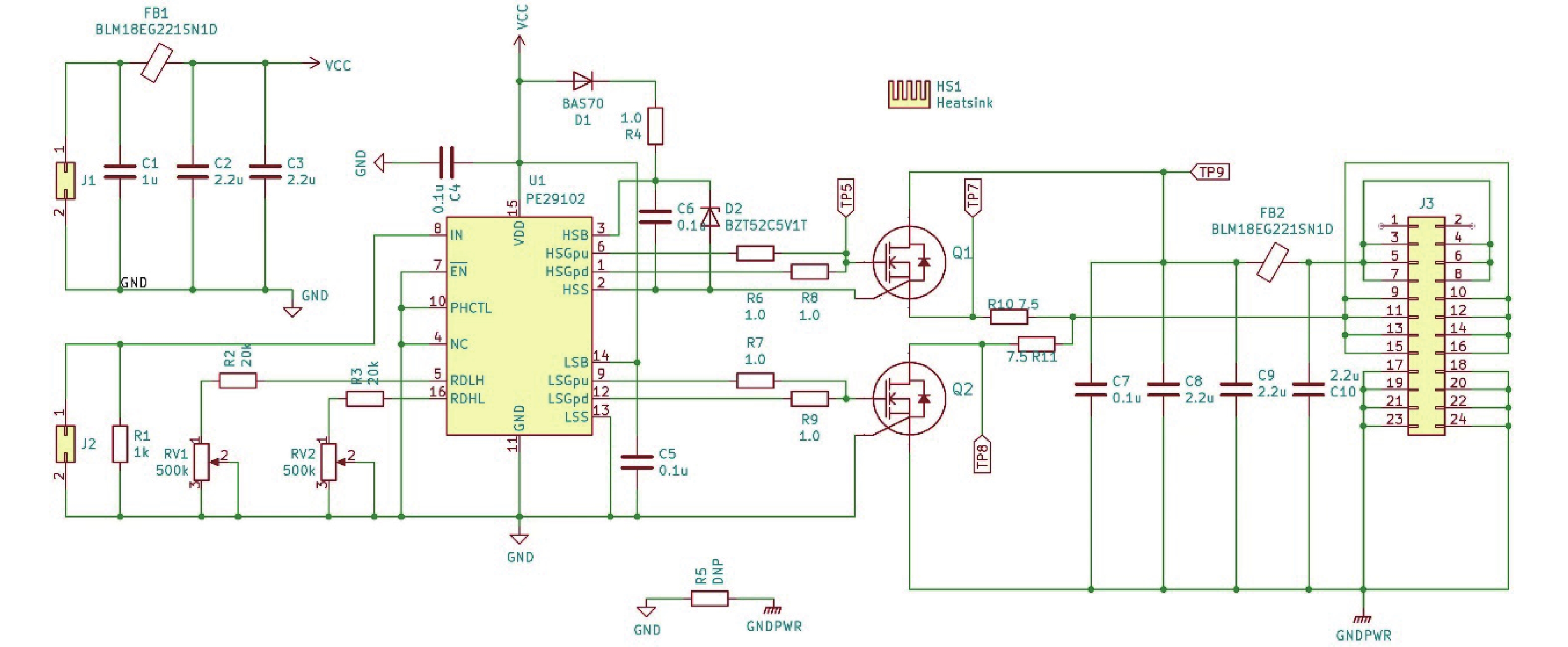
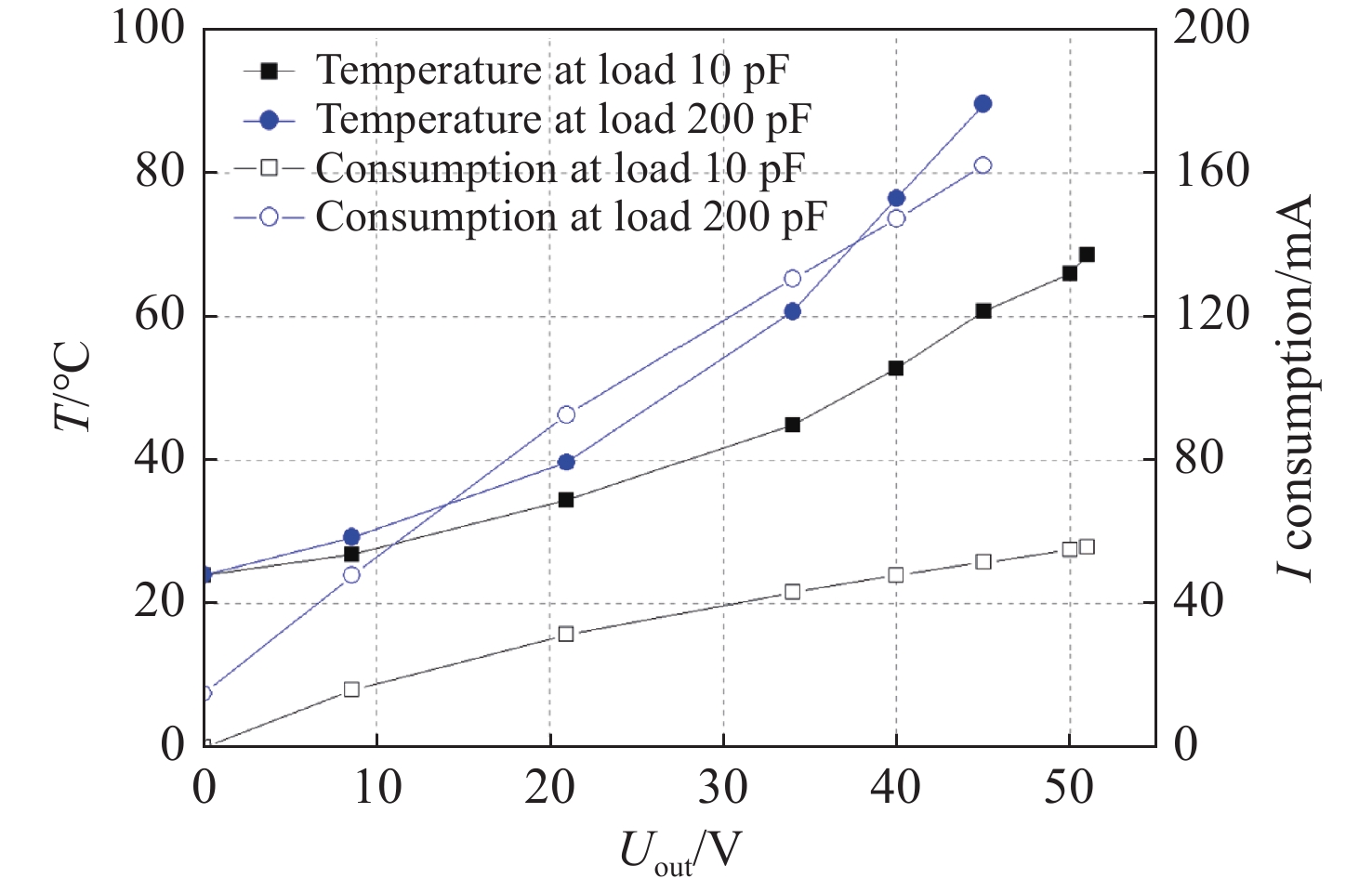
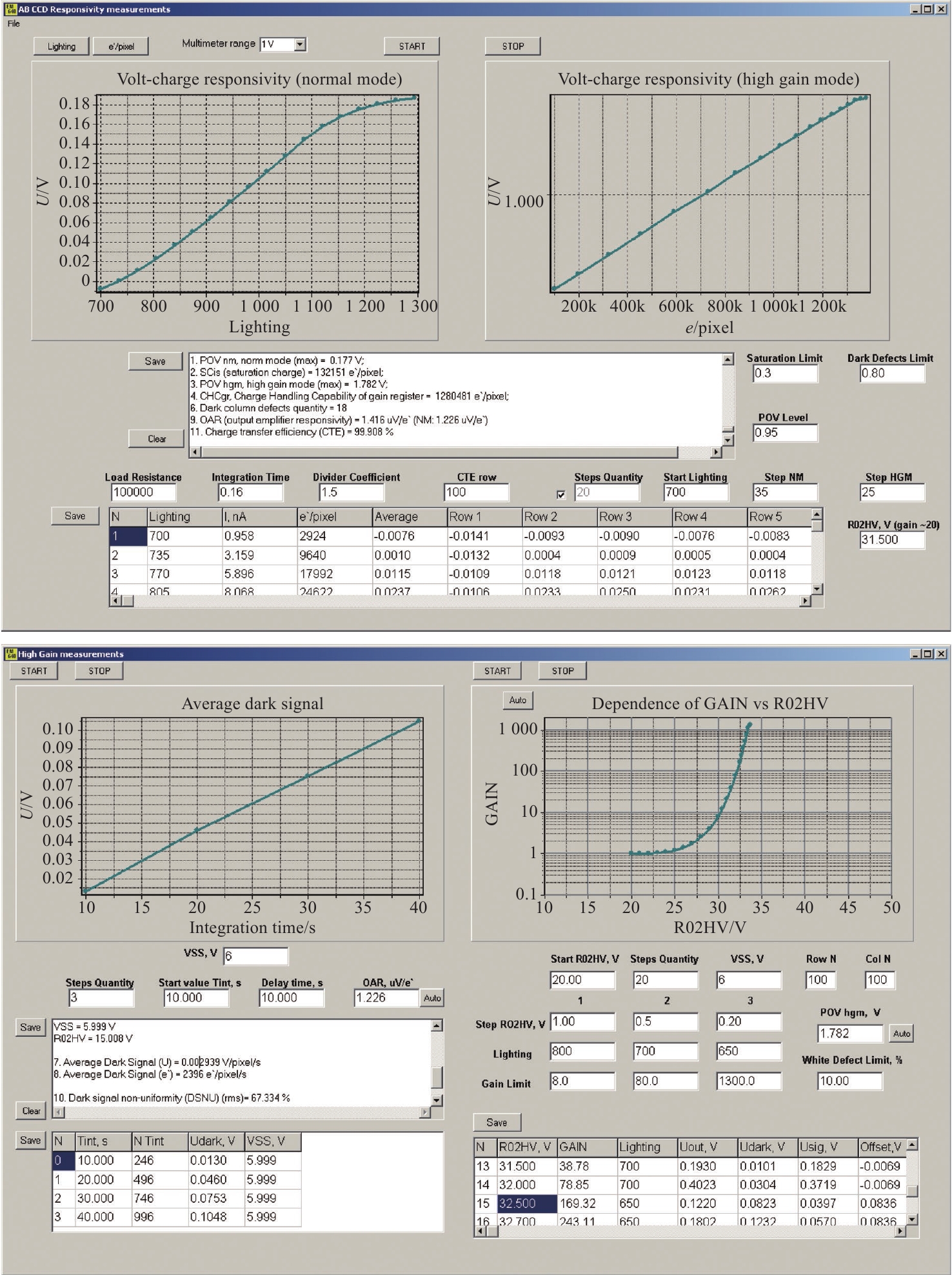
本文开发了一种用于测量CCD和EMCCD(电子倍增CCD)芯片光电参数的测试系统。该测试系统通过自动模式或手动模式间的切换,测量器件的暗电流、读出放大器的响应度、电荷转移效率、电荷容量和其他参数。该测试系统可以针对不同规格和结构的CCD/EMCCD器件,实现CCD晶圆或封装好的成品的参数测试,实现576×288、640×512、768×576、1024×1024、1280×1024 CCD/EMCCD的测试和筛选。



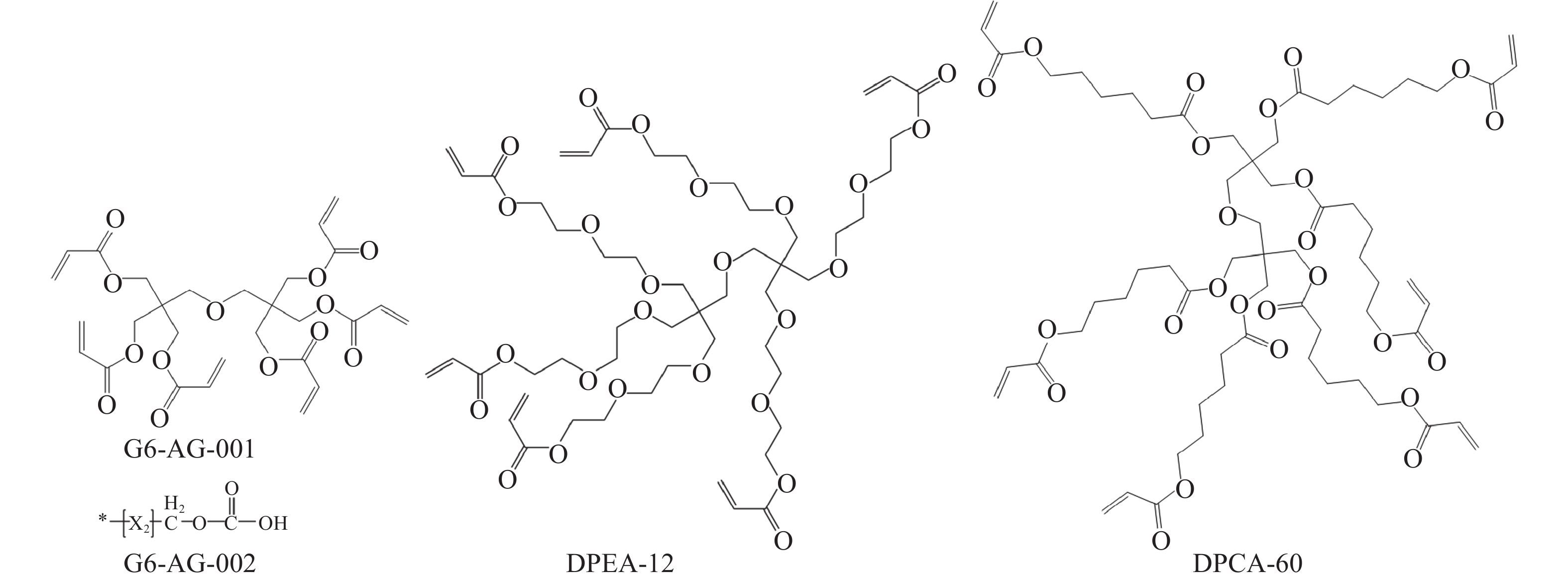
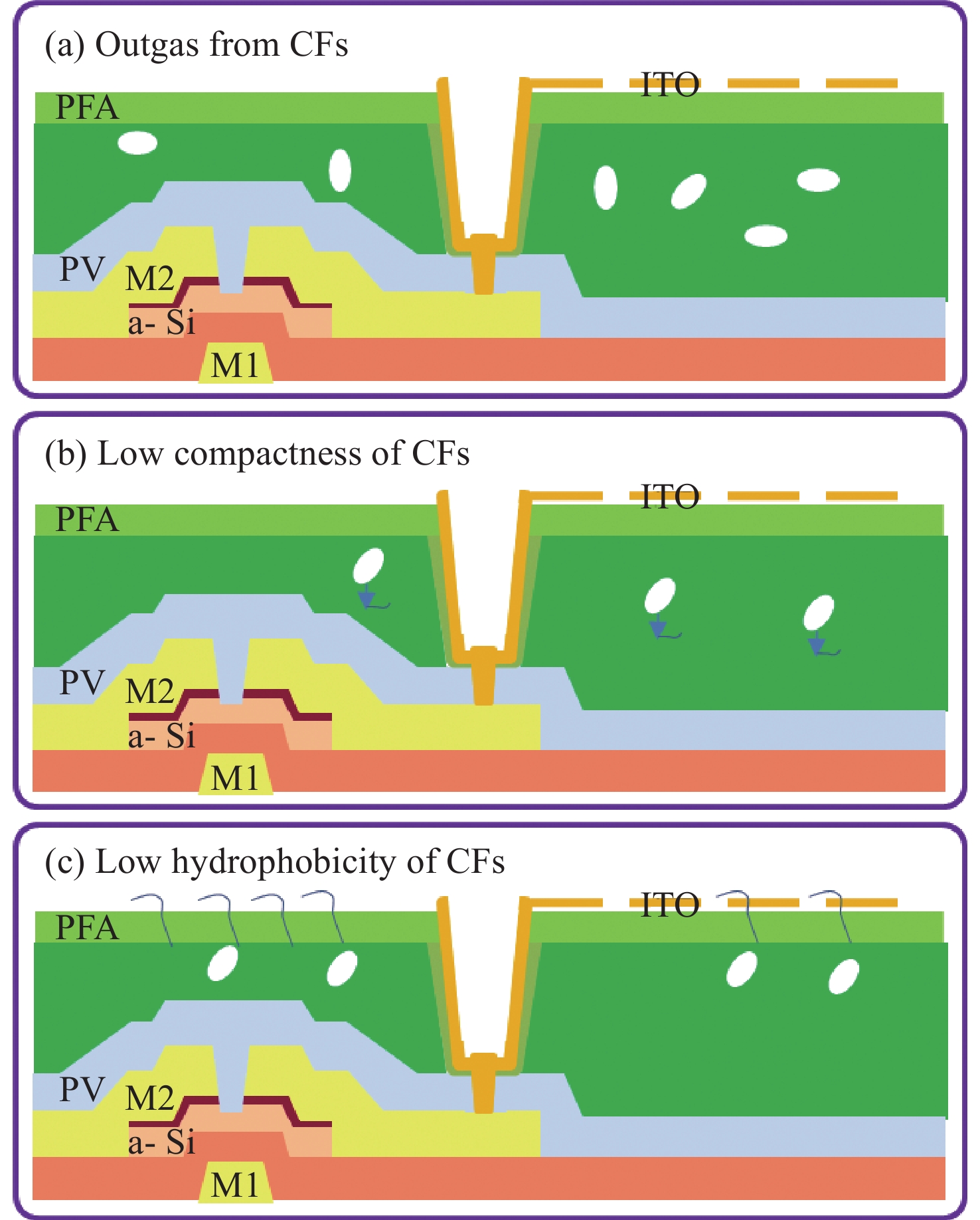
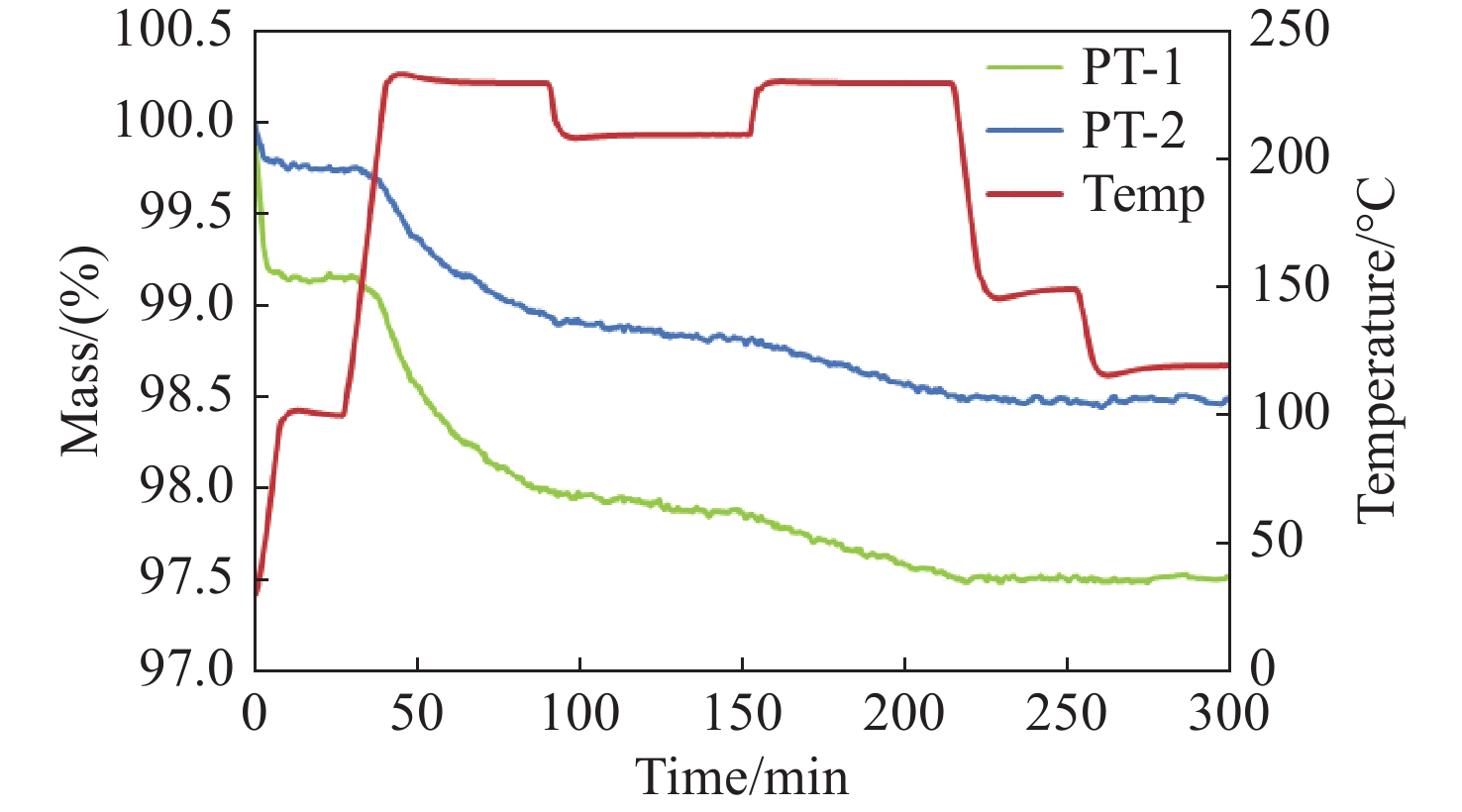
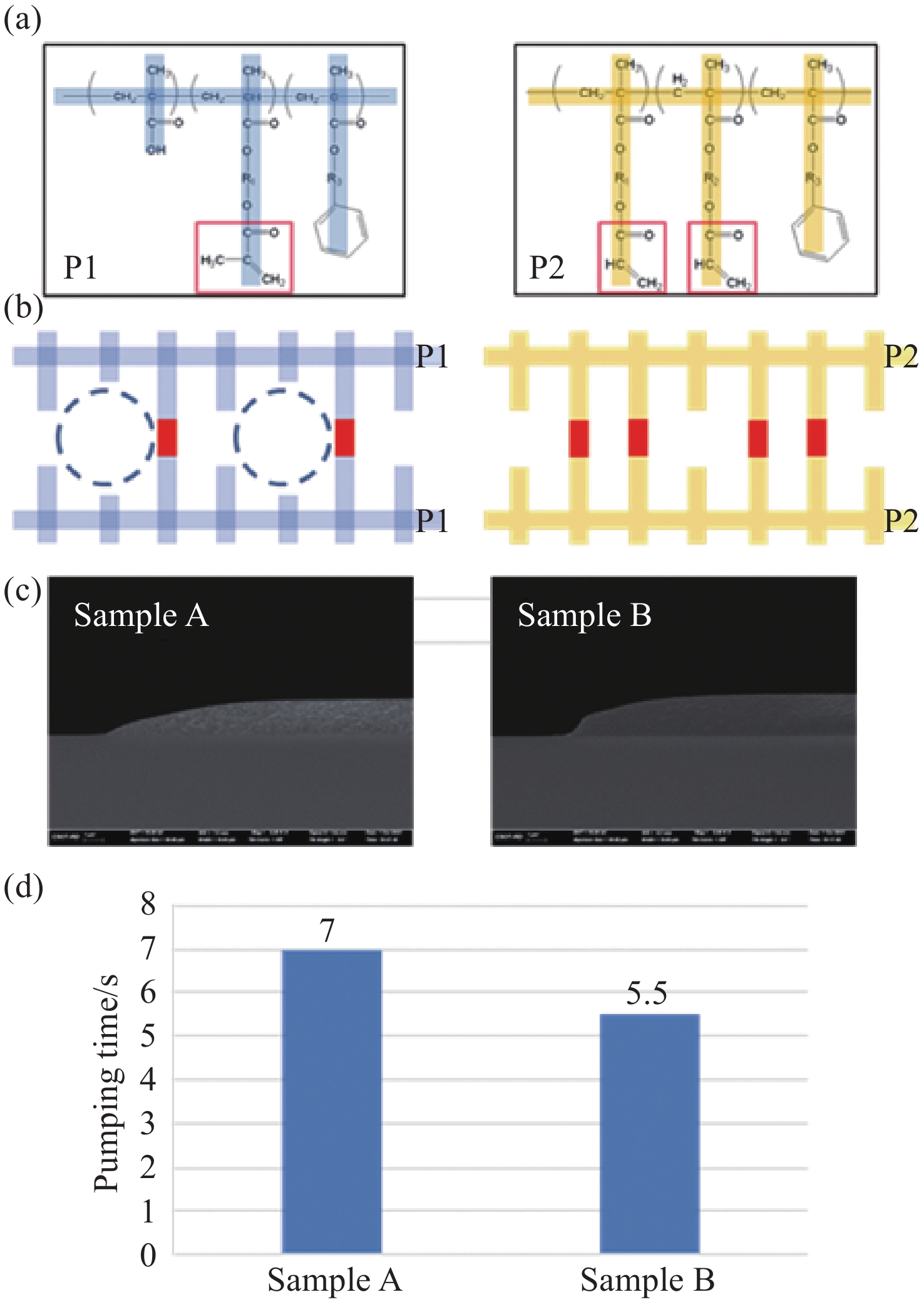
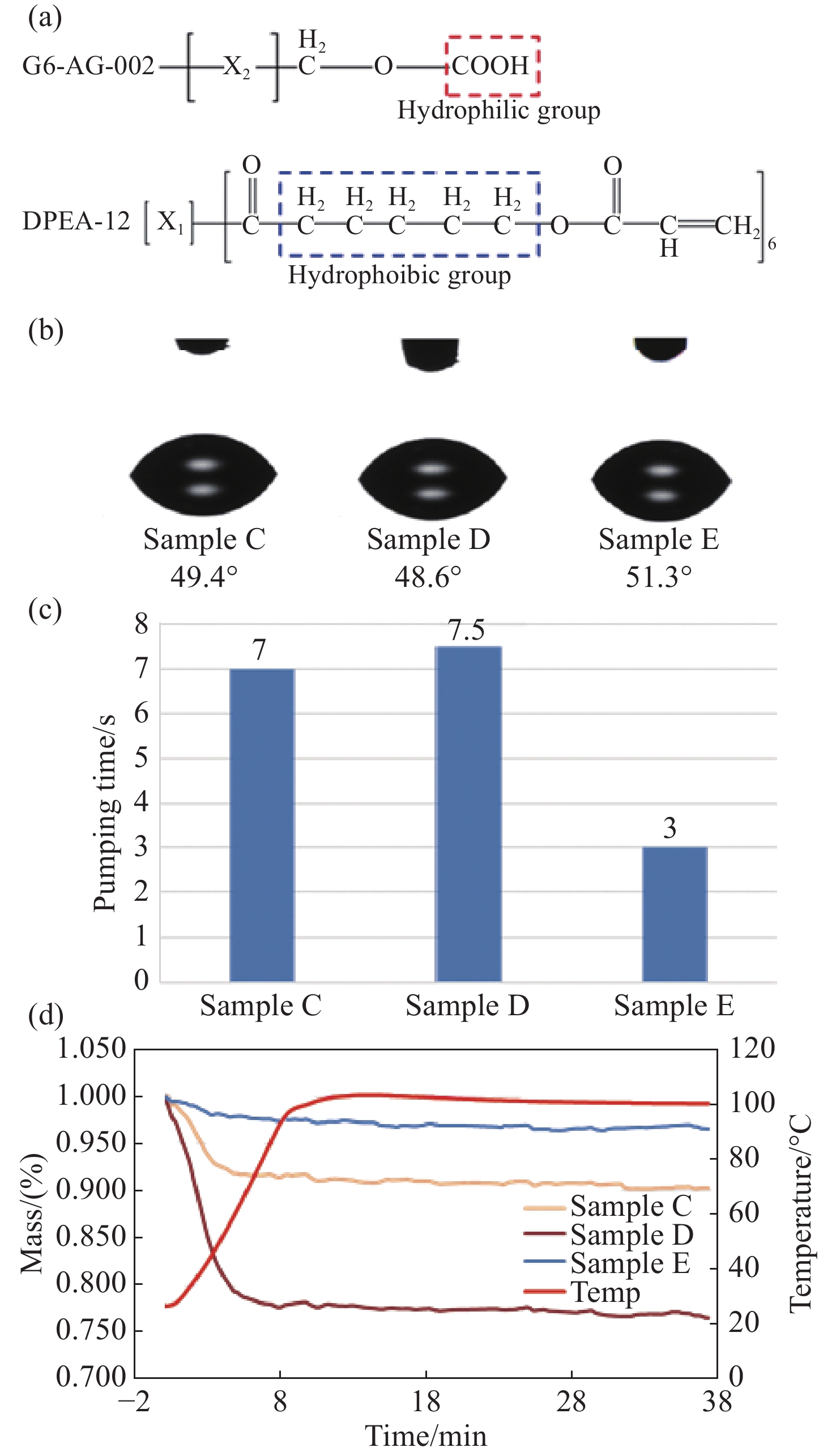
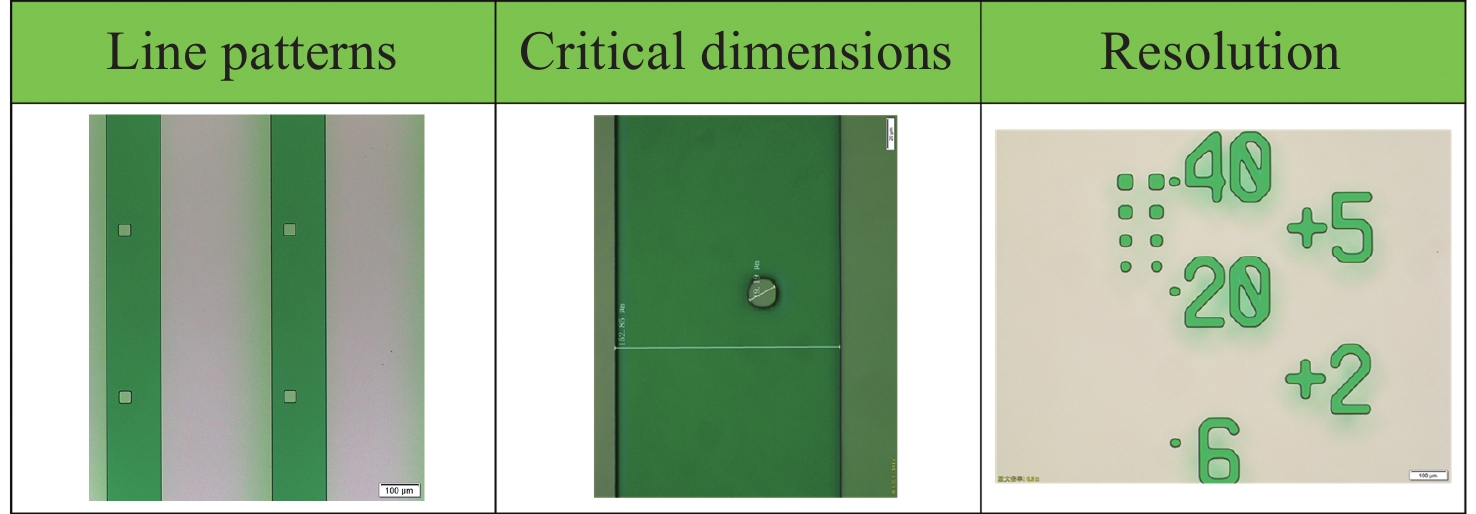
TFT-LCD产业正朝着高效率、低成本的方向发展。在TFT-LCD制造过程中,发现不同的光刻胶需要不同的真空干燥时间。为了减少制造时间,提高面板成品率,有必要明确影响真空时间的因素。本文探讨了抽运时间与光刻胶材料性能的关系。发现光刻胶的热稳定性与抽运时间的关系可以忽略不计。光刻胶的致密性和疏水性与真空干燥时间密切相关。致密性和高疏水性可以有效避免水蒸气在制造过程中侵入和储存在光刻胶中,减少泵送次数。总的来说,这项工作可以为未来TFT-LCD工业新型光刻胶的开发提供一定的参考。

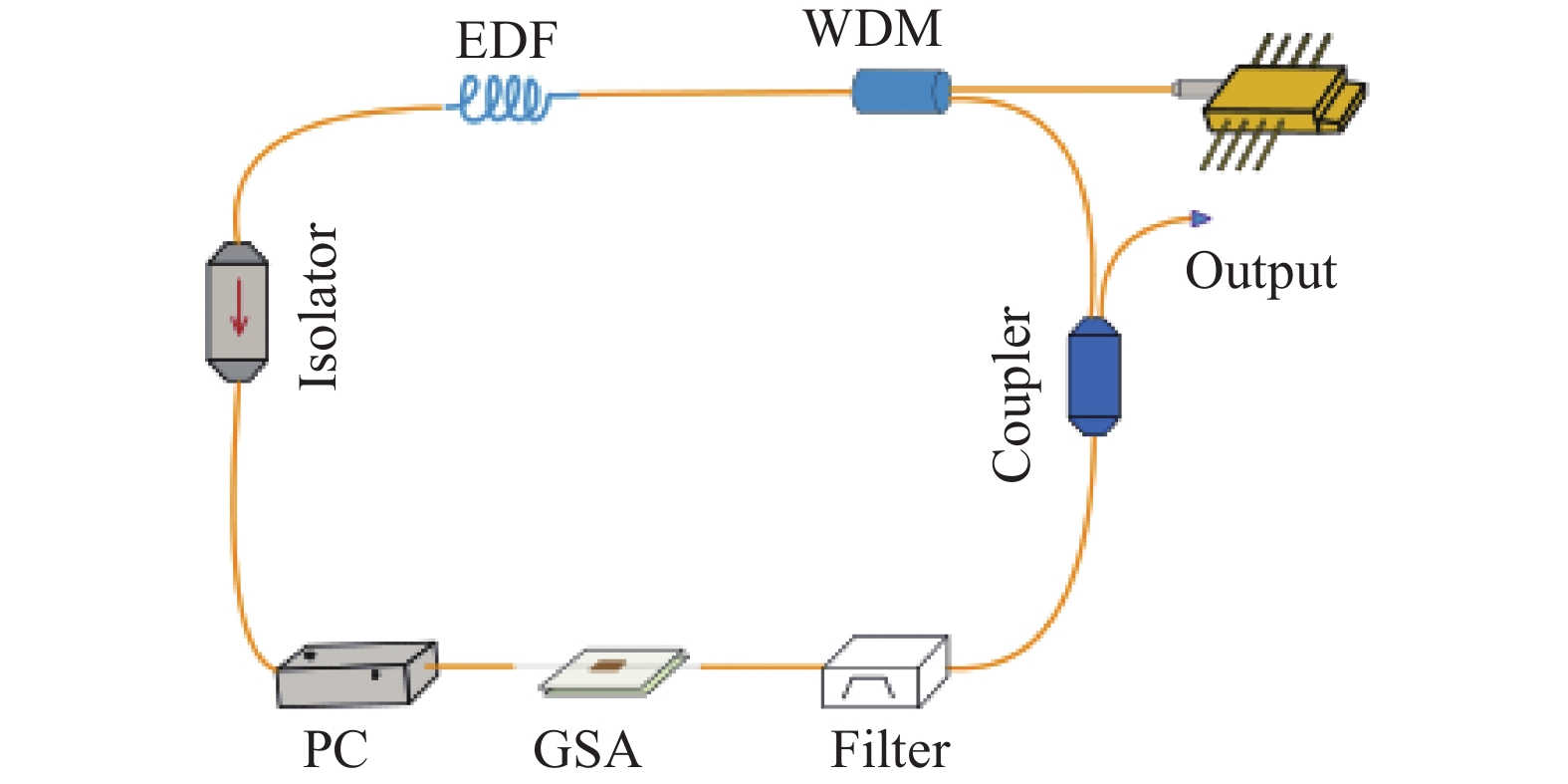
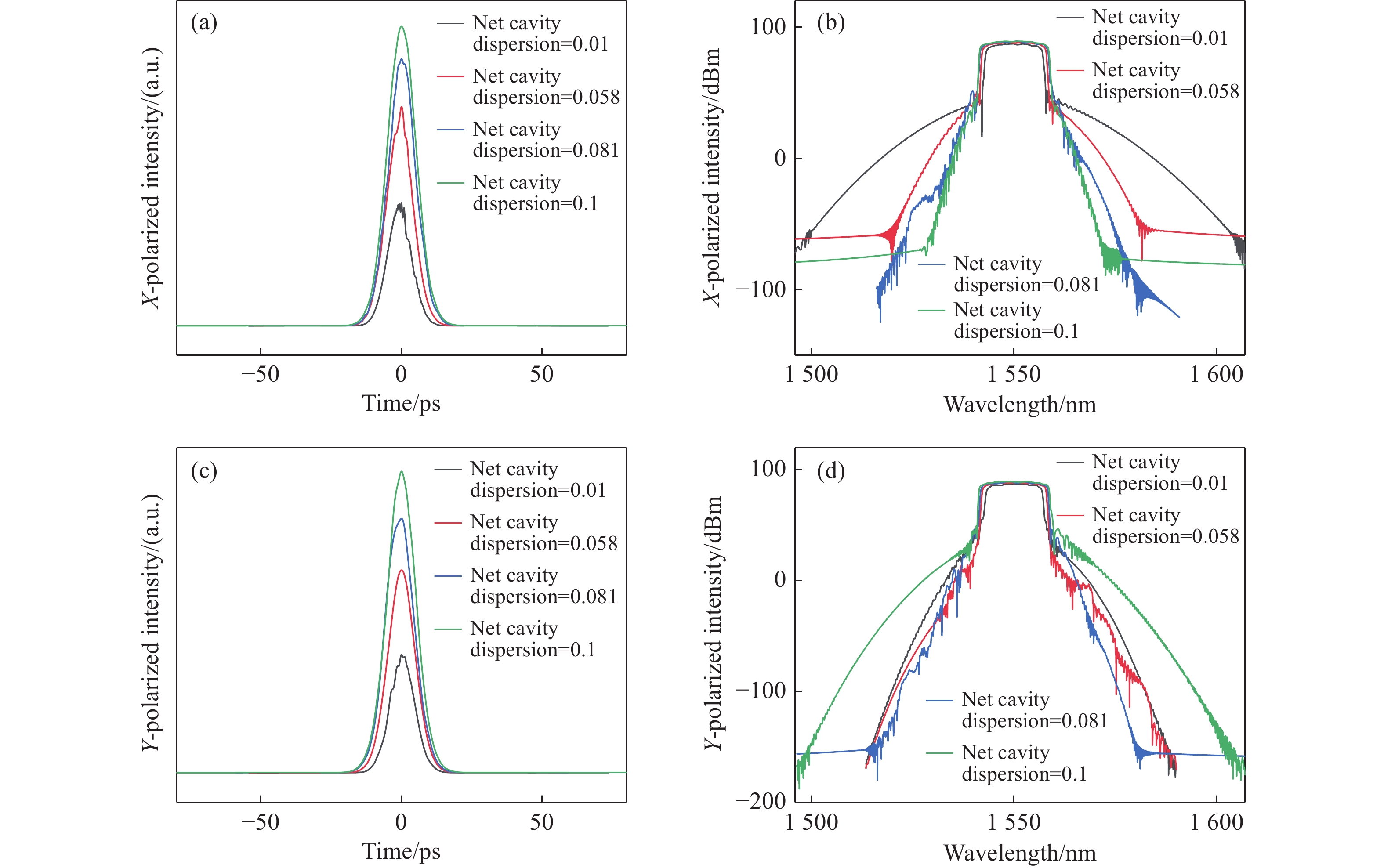
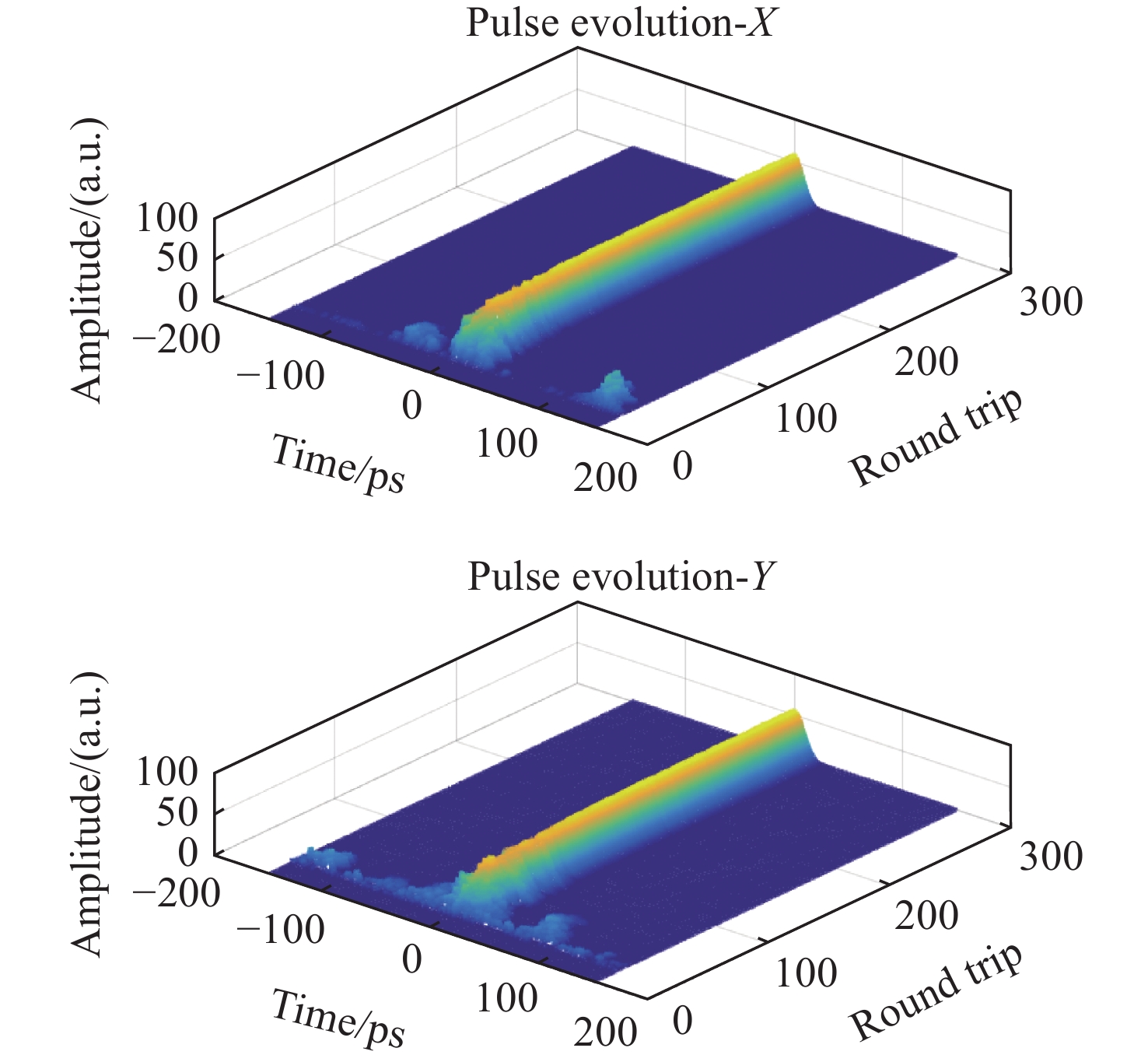
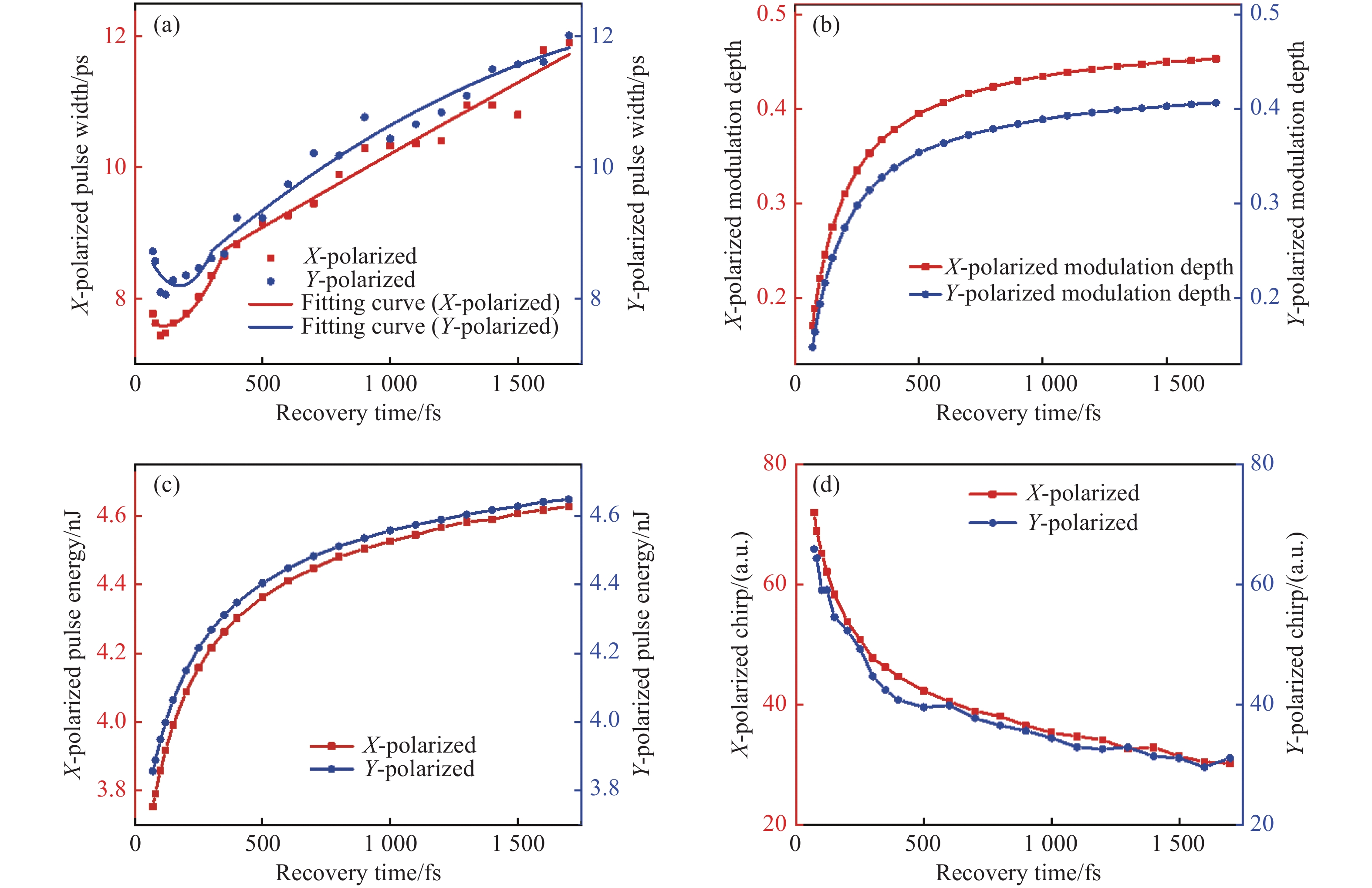
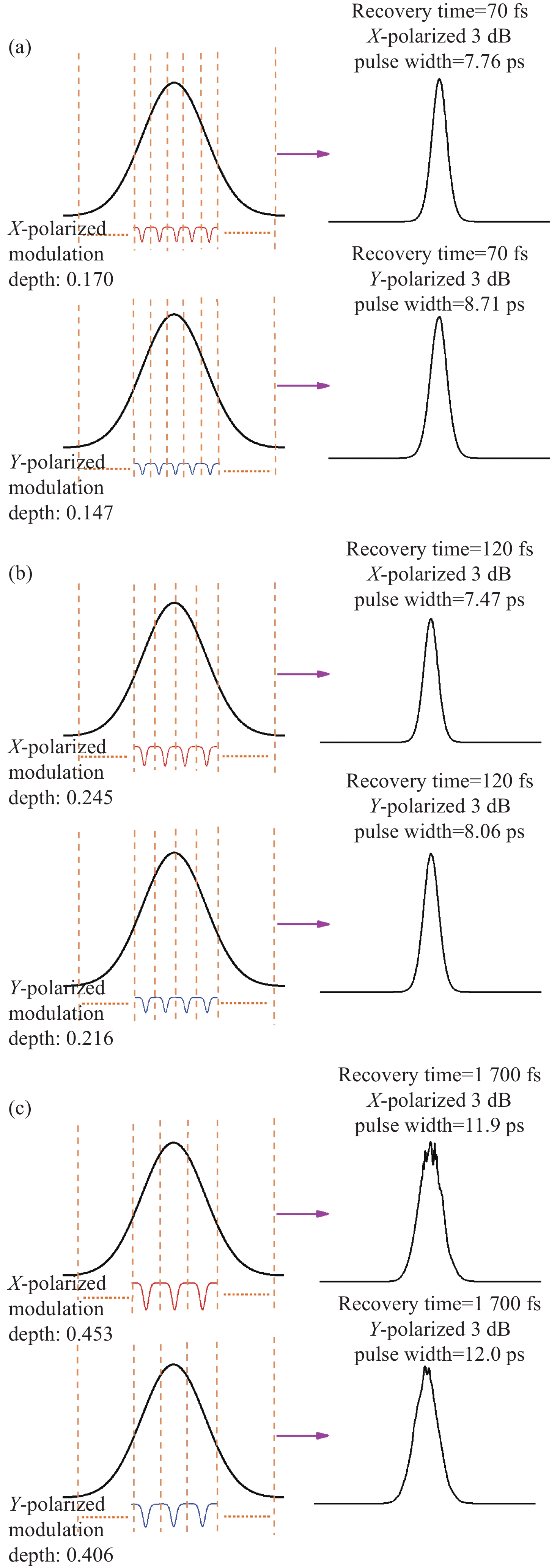
偏振在脉冲锁模时,对其塑形和稳定起着至关重要的作用。本研究开发了一种用于产生正交偏振耗散孤子的被动锁模石墨烯光纤激光器的正交偏振数值模拟。重点是分析由偏振依赖的石墨烯微光纤饱和吸收体引起的净正常色散双折射腔对正交偏振孤子的影响。研究结果表明,这种饱和吸收体的恢复时间显著影响正交偏振耗散脉冲的特性,如能量、脉宽、时间带宽乘积和啁啾。结果显示,其恢复时间为120飞秒时最佳,产生两个具有大啁啾的正交偏振的窄耗散孤子脉冲,分别约为7.47 ps和8.06 ps。这对于开发紧凑、高功率、偏振耗散孤子光纤激光系统具有重要意义。