2024年 17卷 第6期
 摘要
摘要 HTML全文
HTML全文 PDF 2987KB
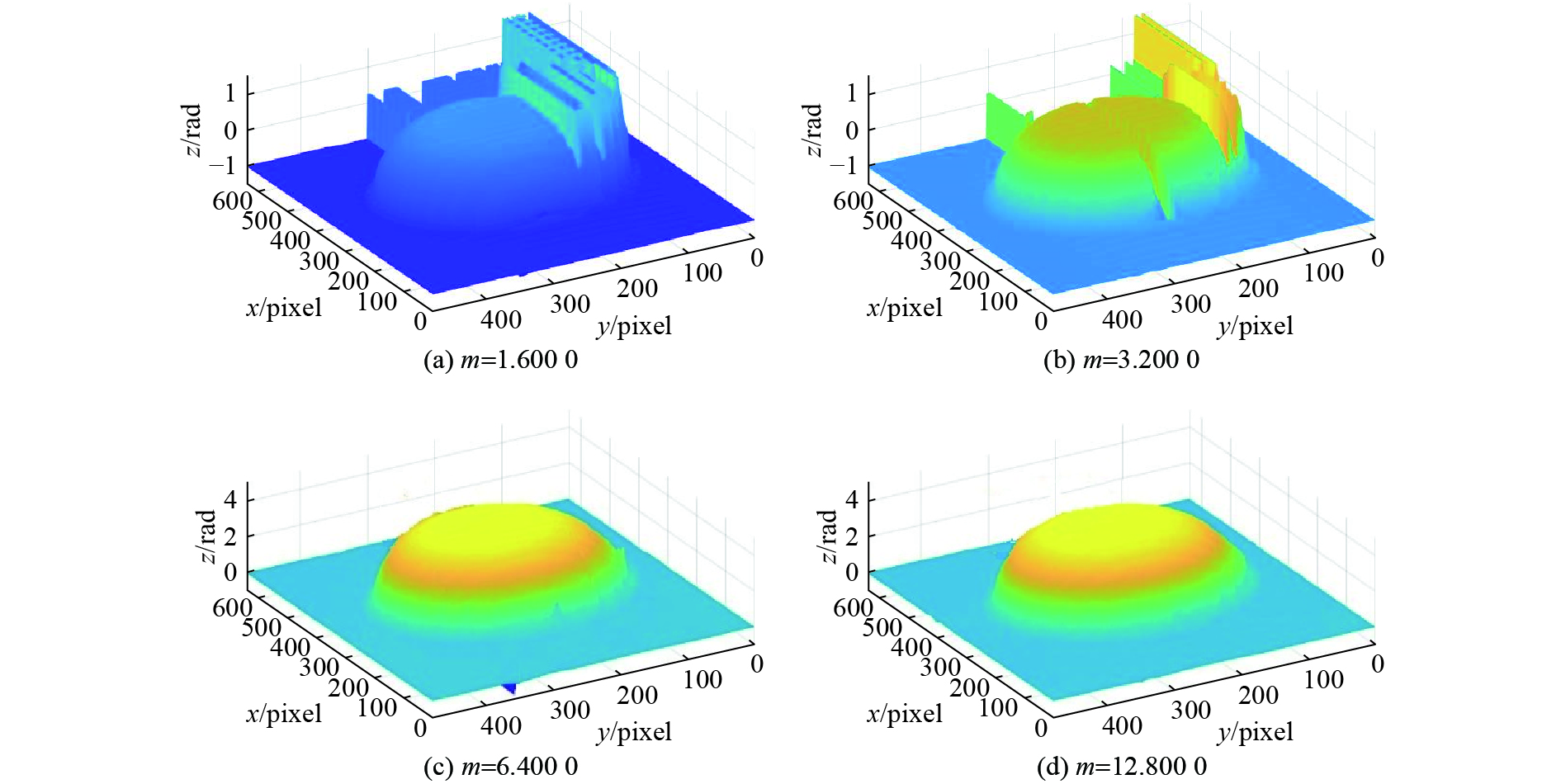
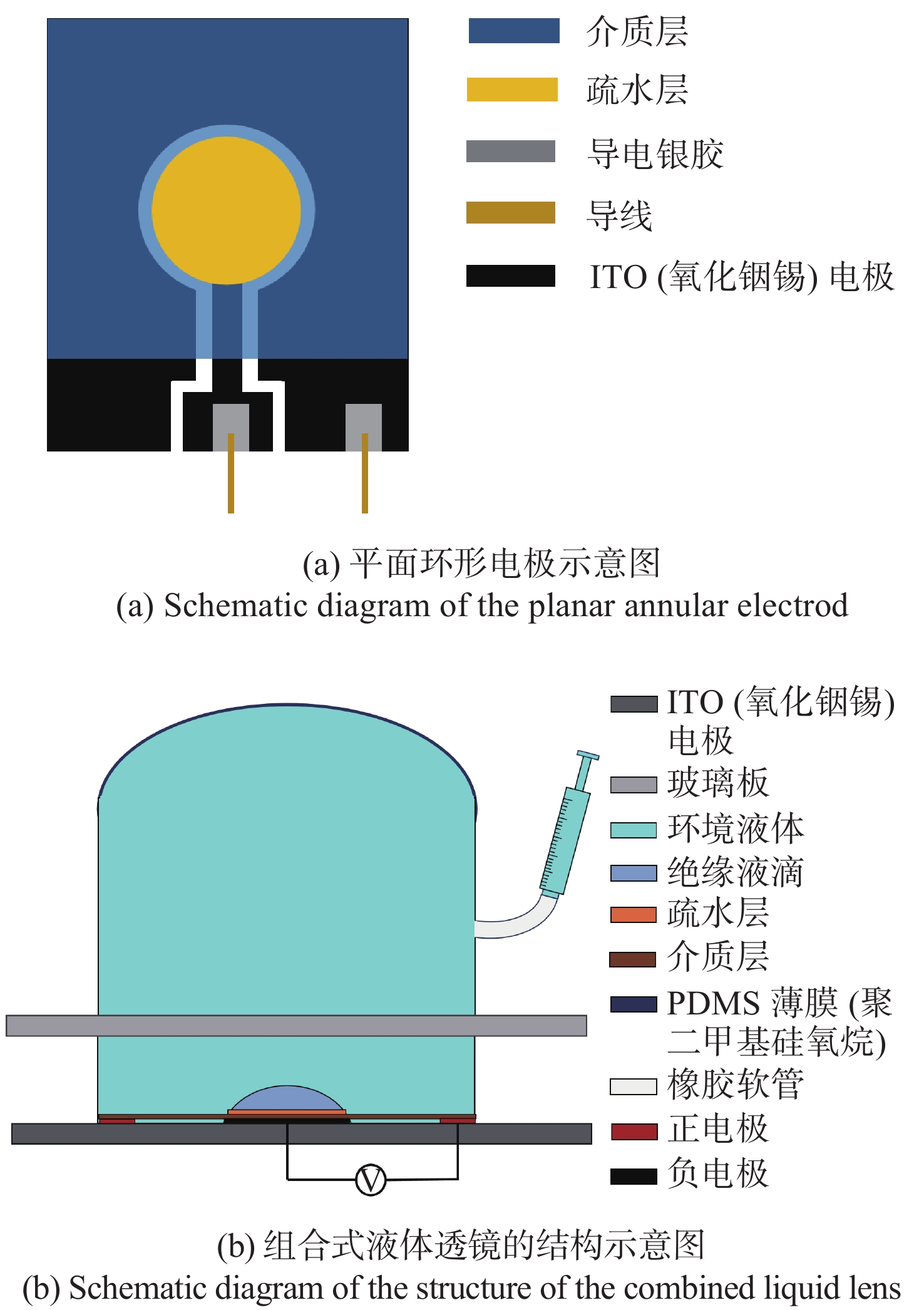
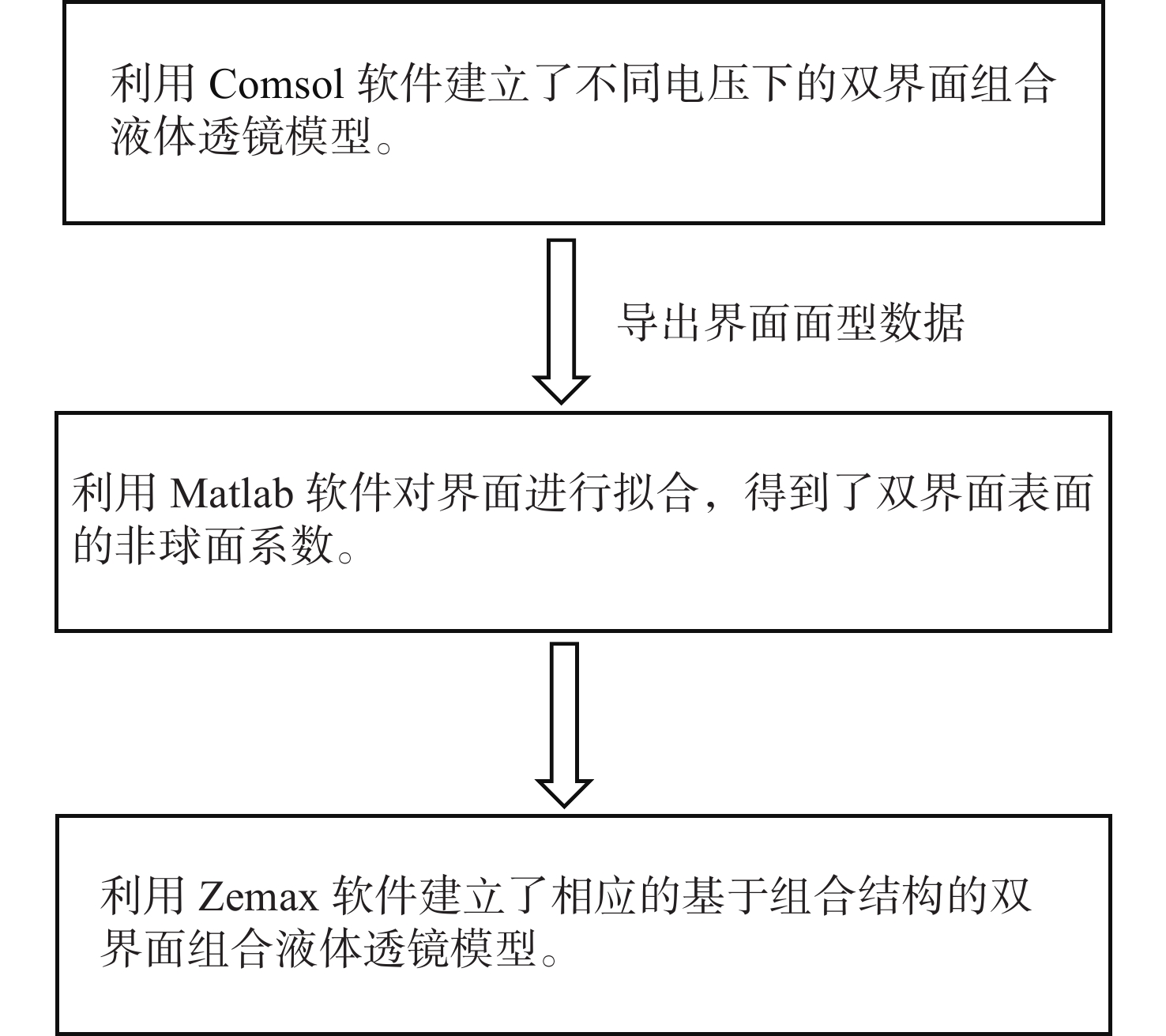
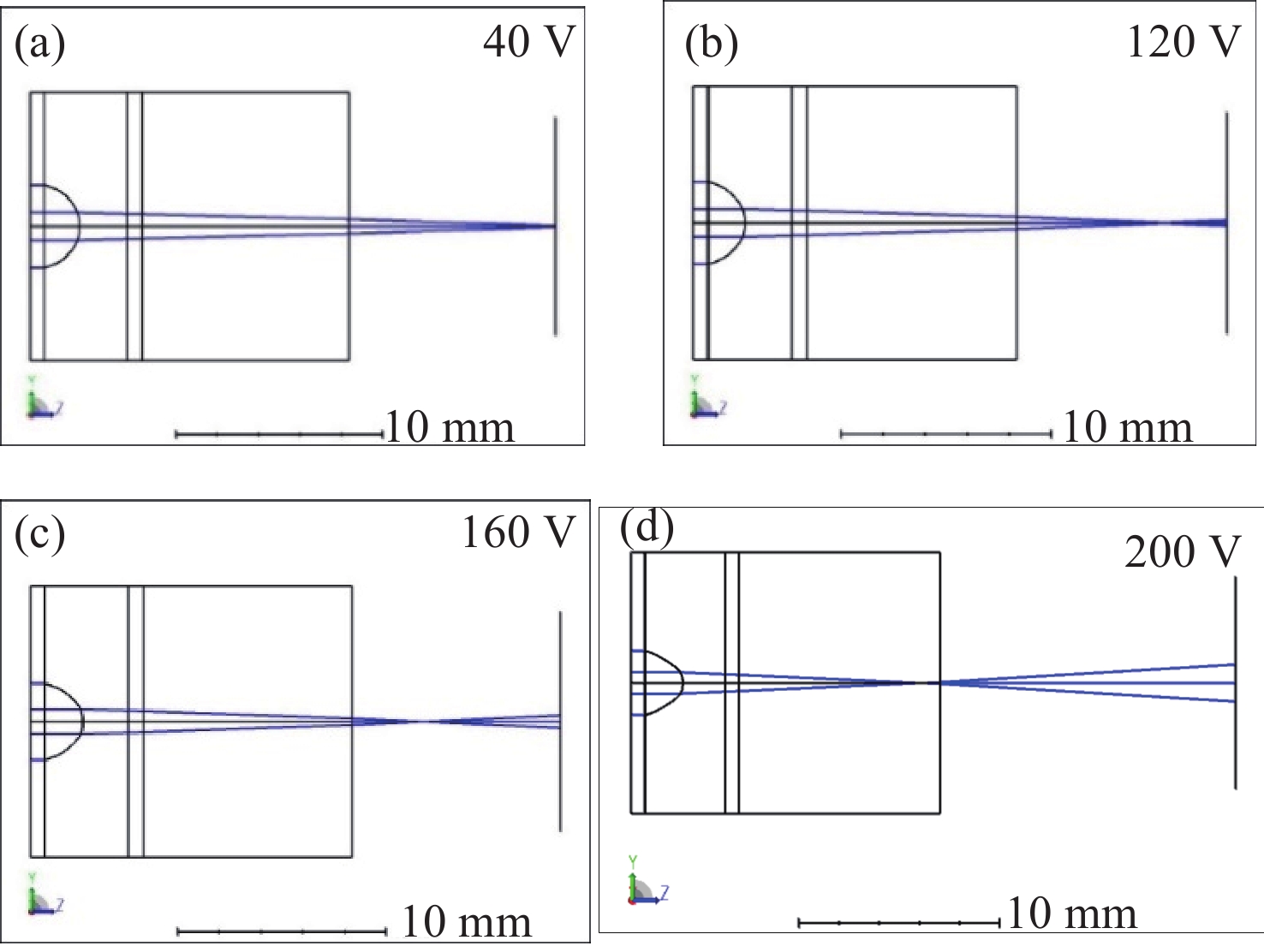
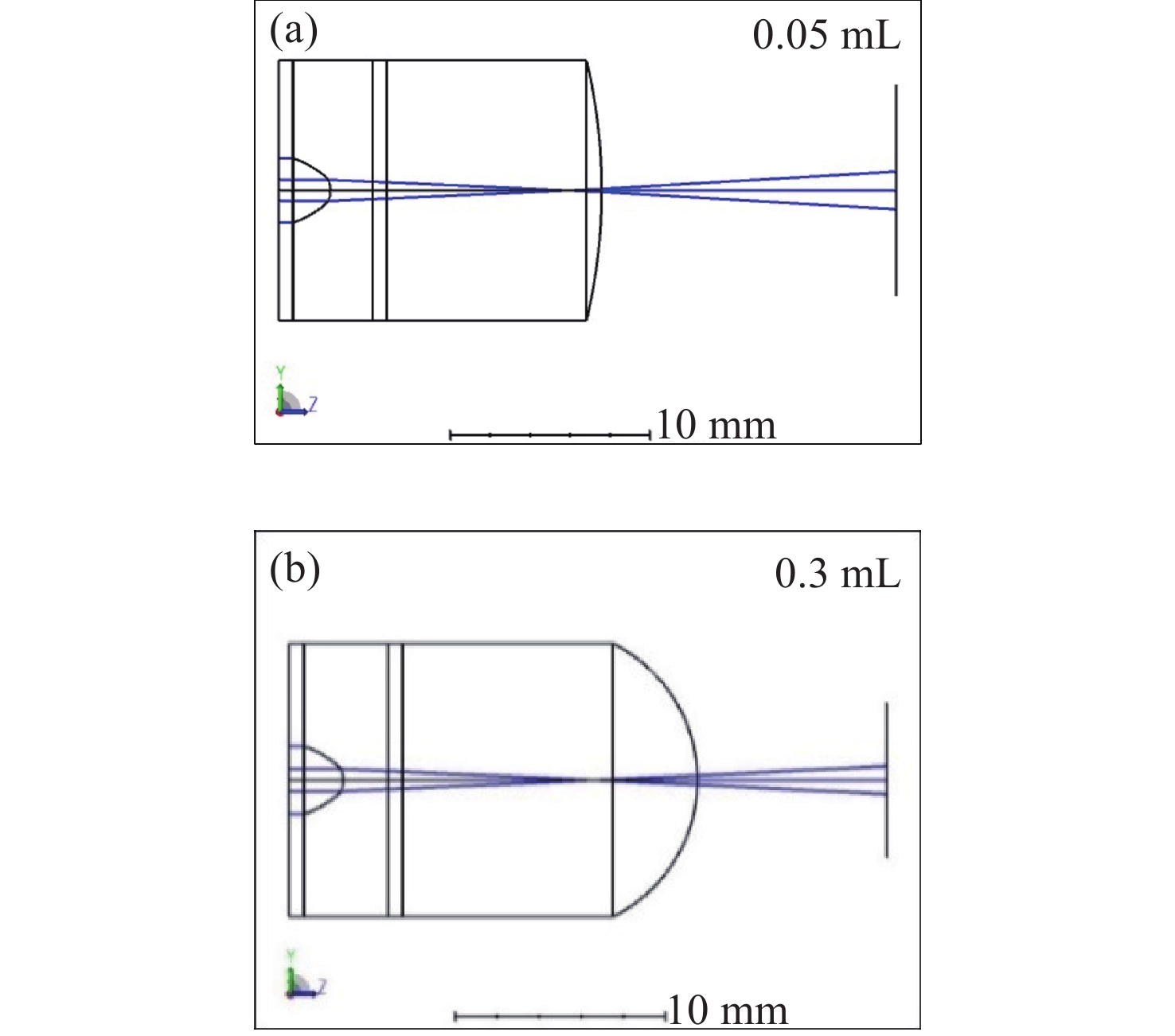
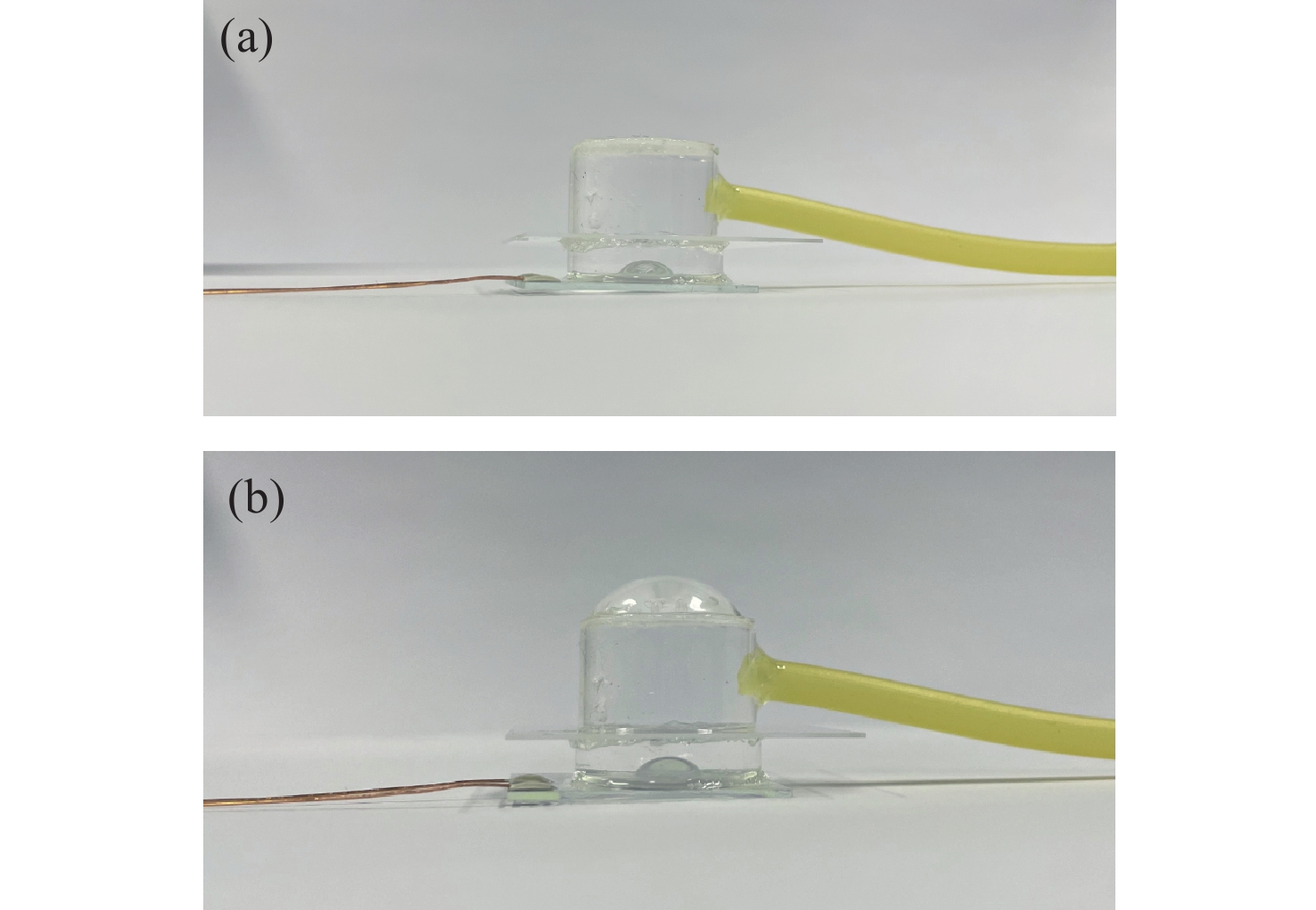
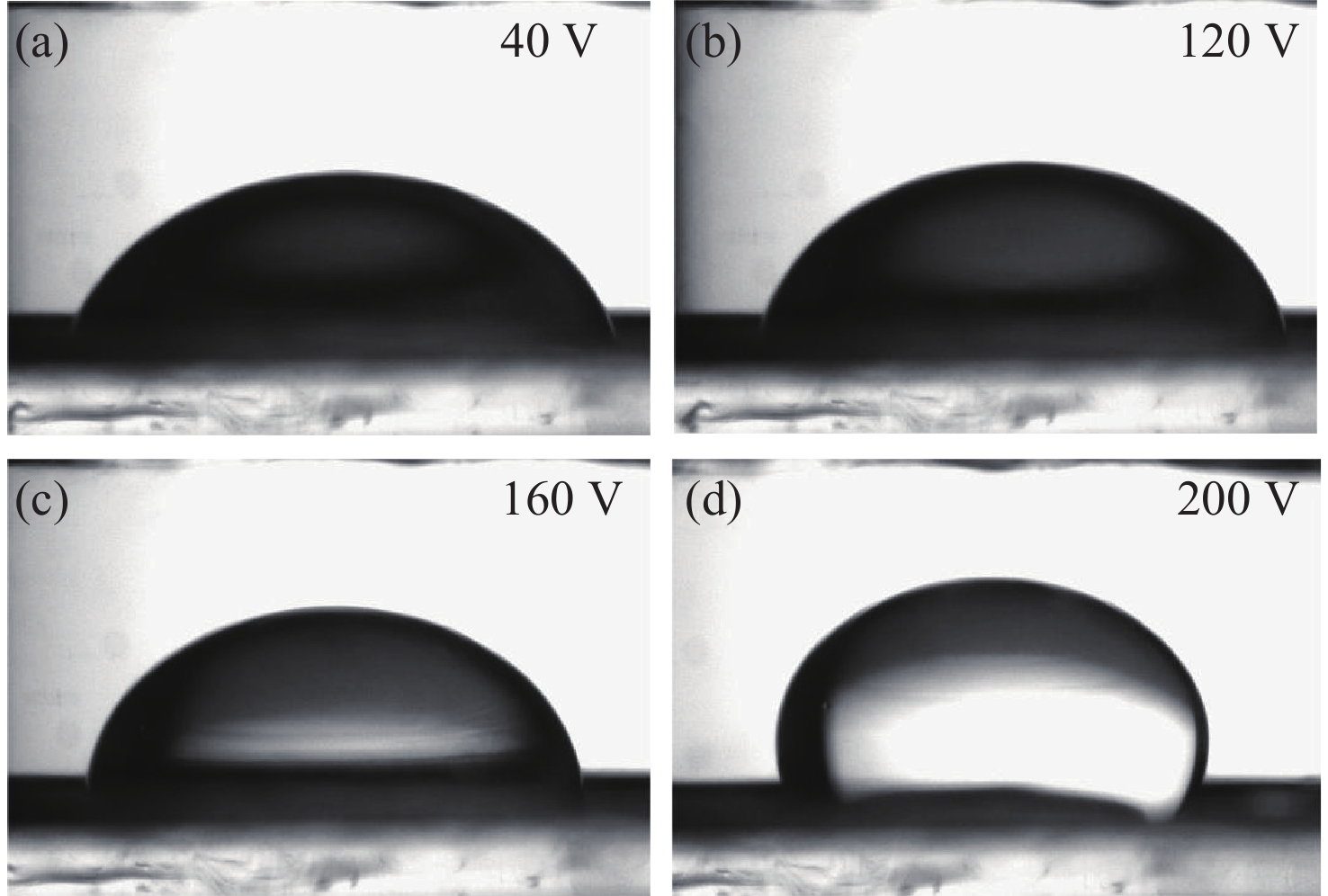
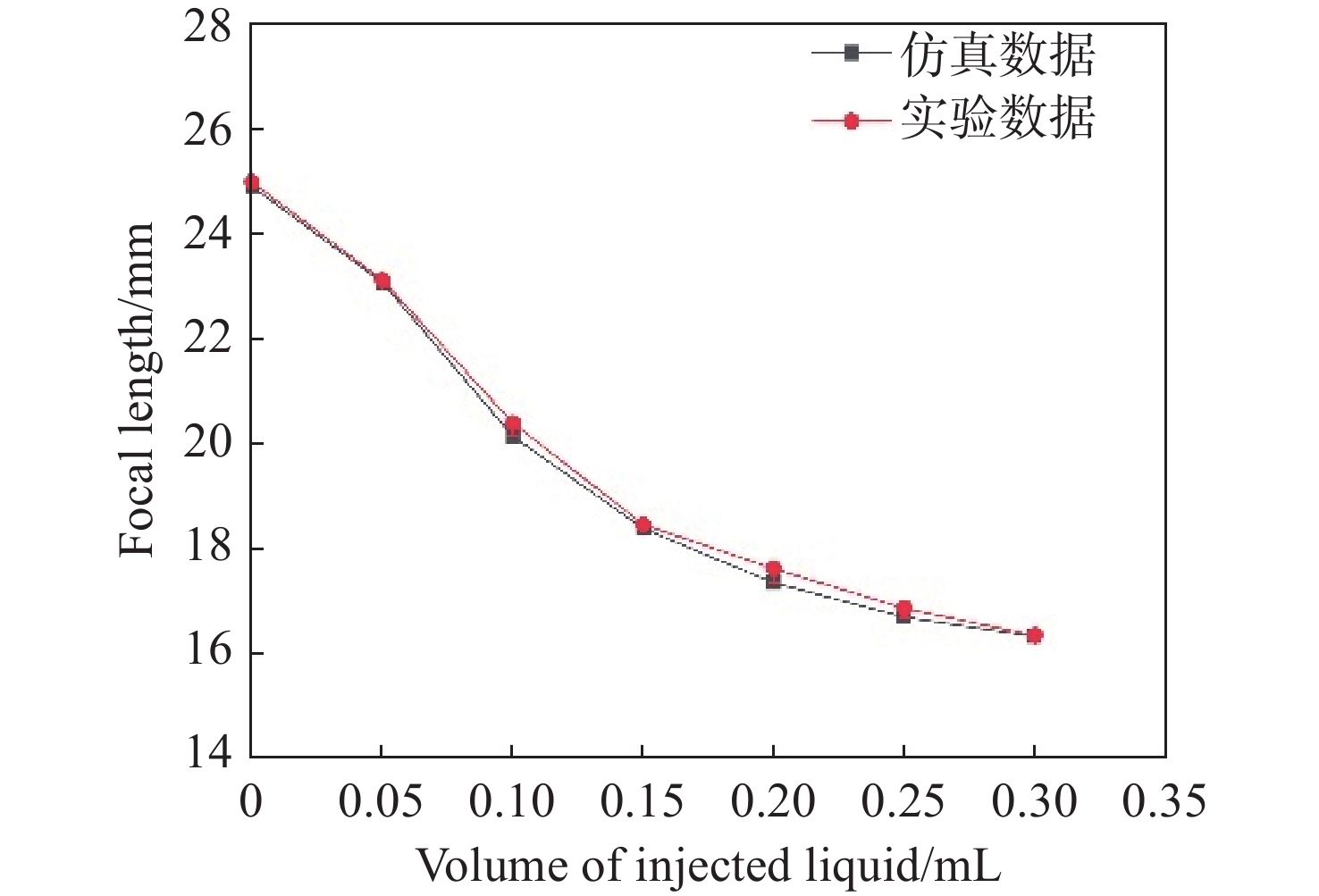
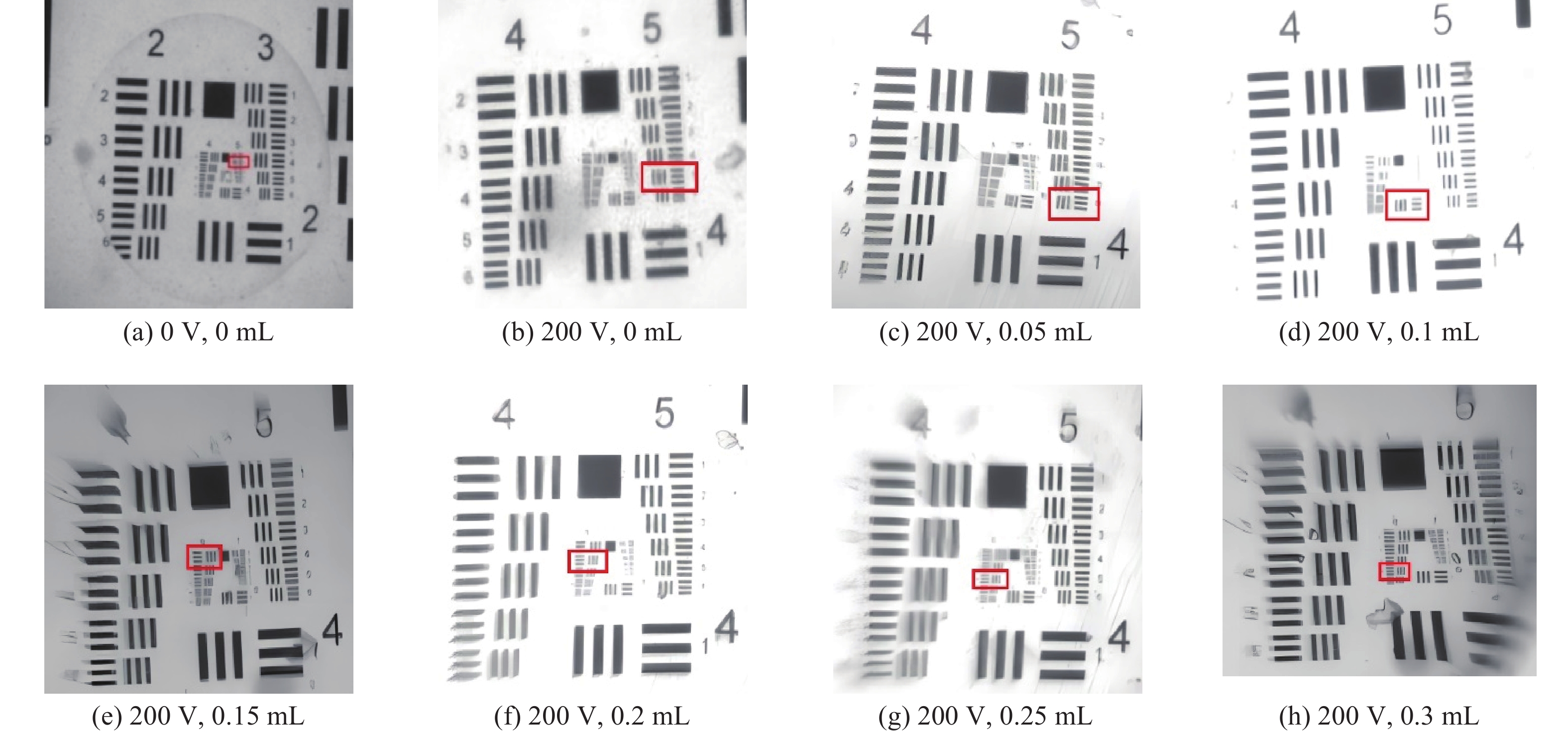
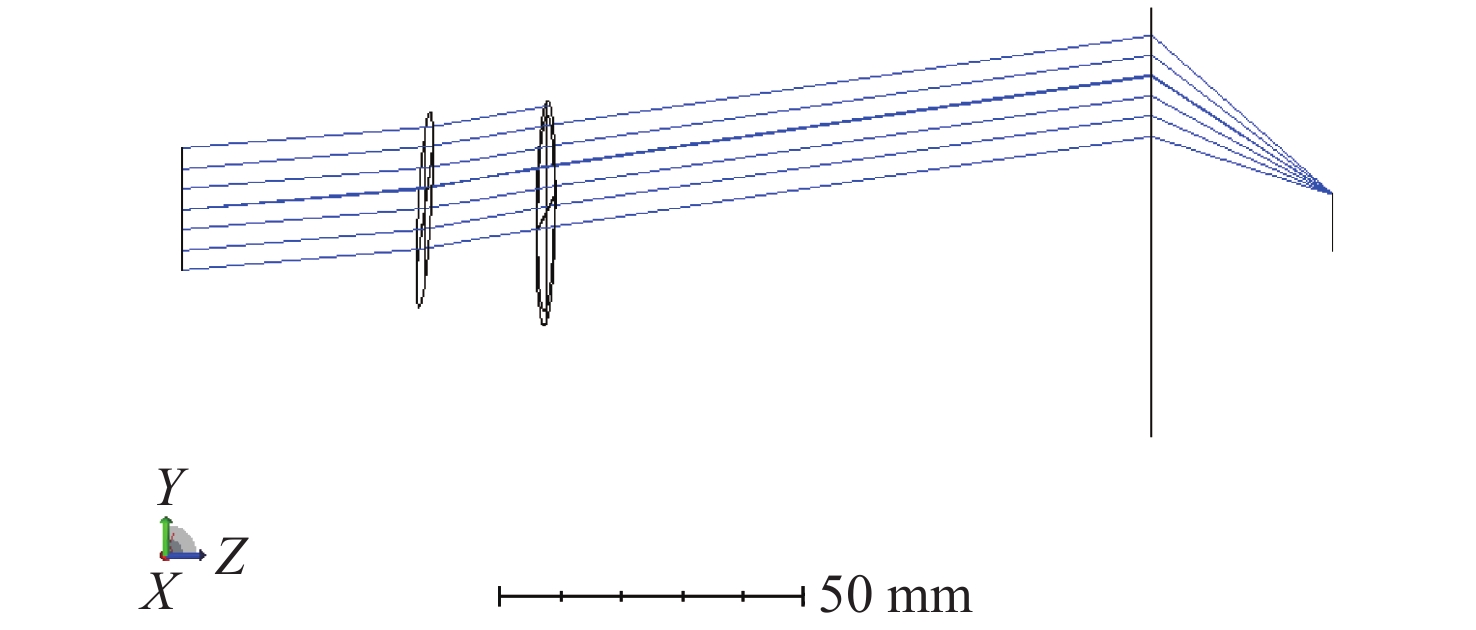
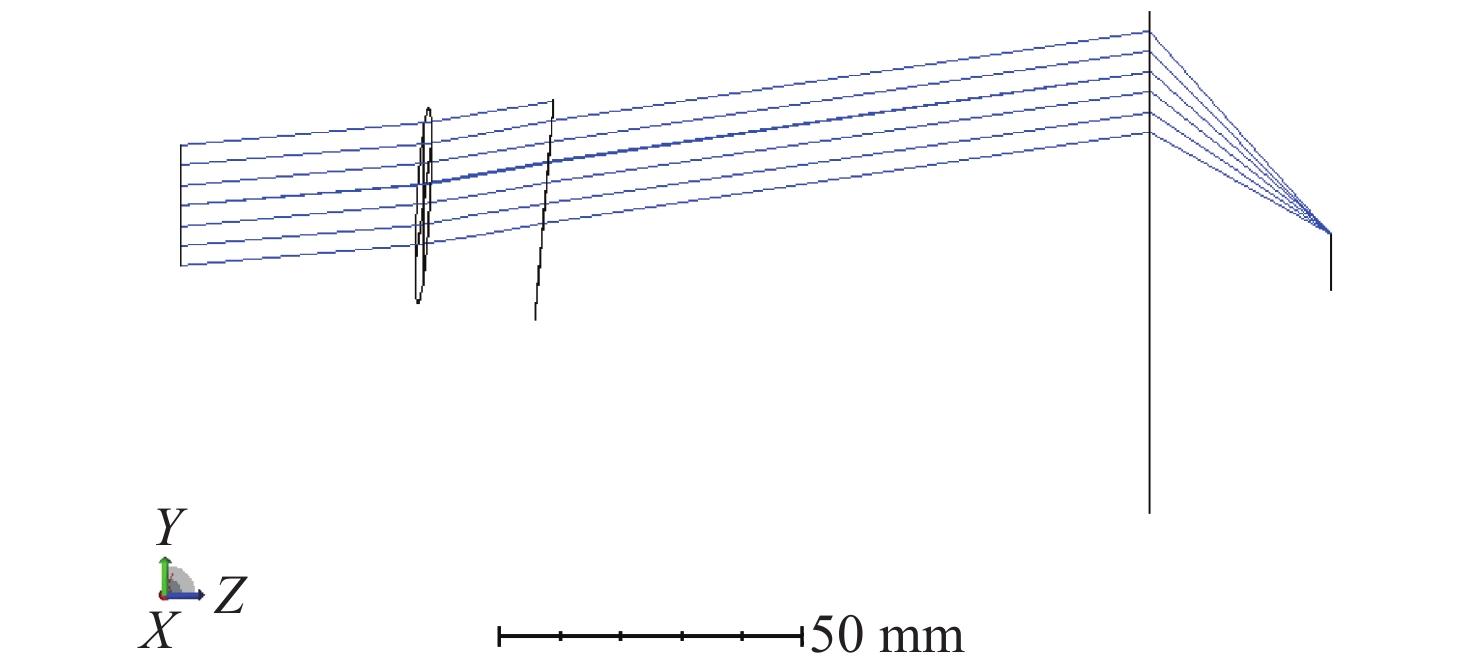
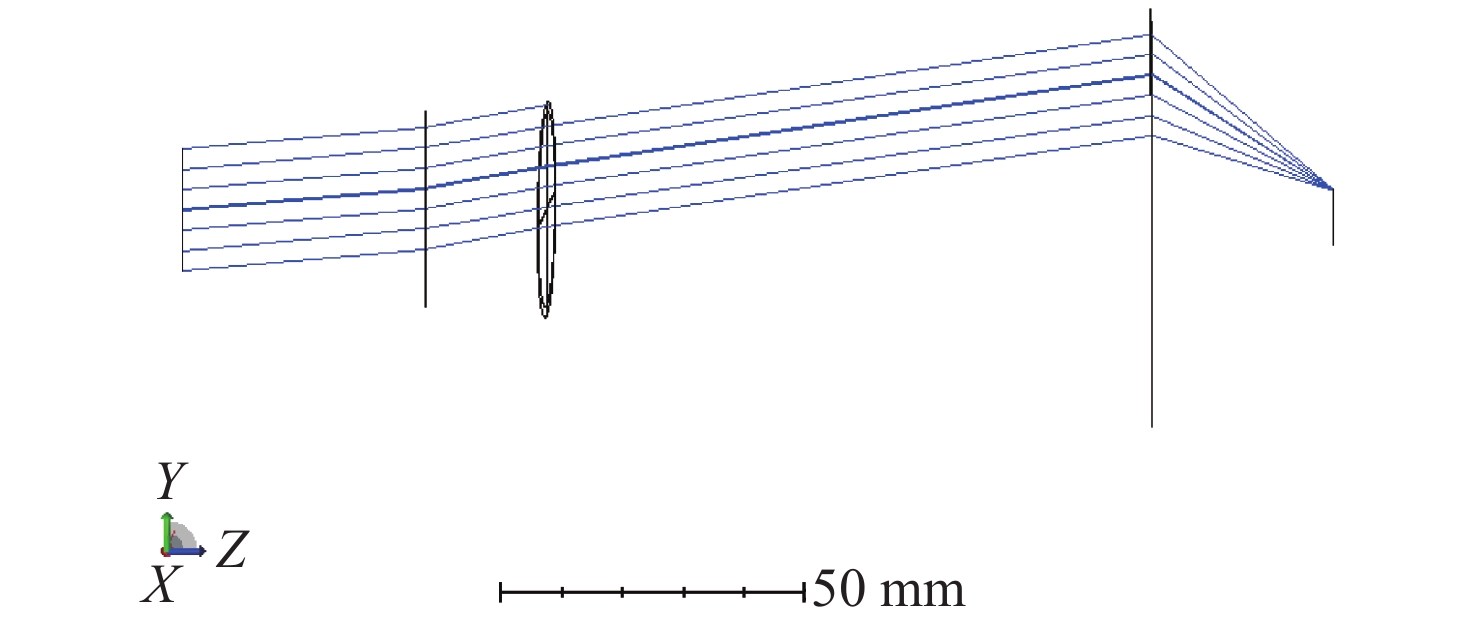
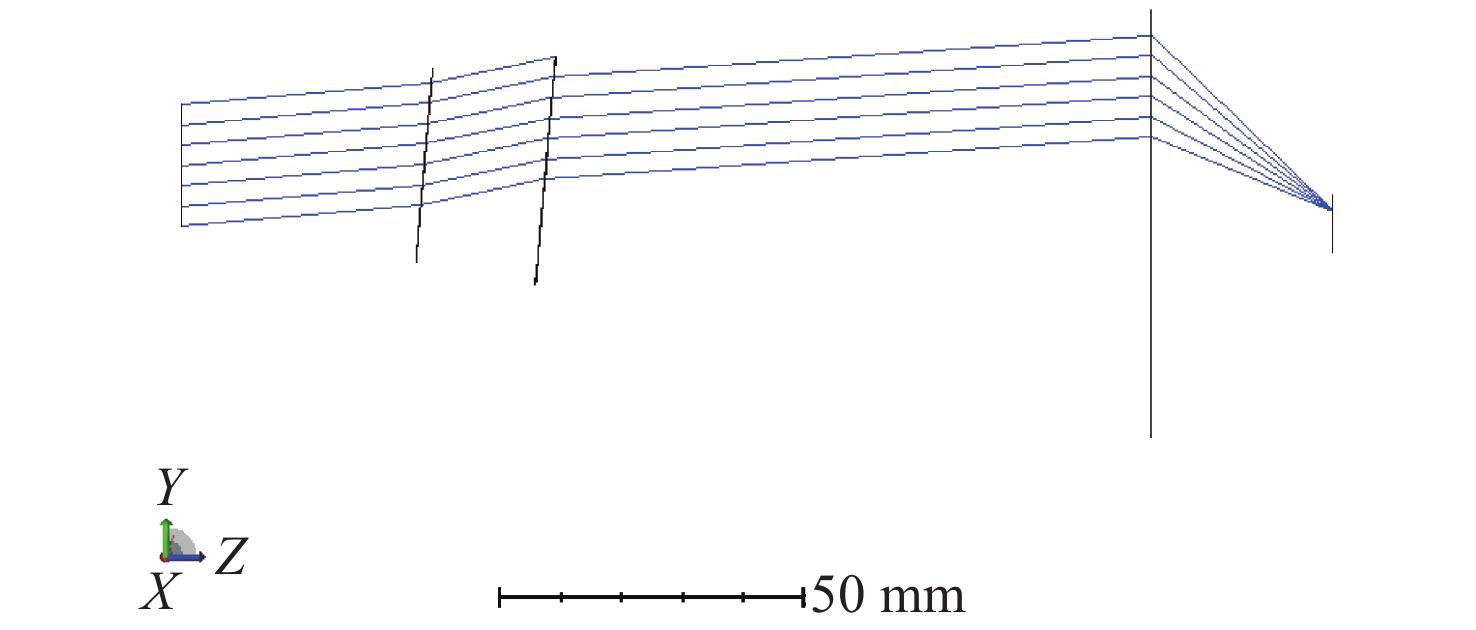
PDF 2987KB为了提高液体透镜的成像质量和变焦范围,应用介电泳和液压驱动,设计了一款基于组合结构的双界面液体透镜,其主要由介电泳双液体透镜和PDMS薄膜液体透镜组成。首先,在Comsol软件中建立液体透镜模型,研究不同电压下的液滴界面和PDMS薄膜的面型变化,并导出两个曲面的面型数据。其次,在Matlab软件中,采用非球面表达式进行拟合,得到不同电压下液滴的界面和薄膜的面型图及其相应的非球面系数。最后,在Zemax软件中,构建出相应的双界面组合液体透镜光学模型,像面选取为高斯像面,并通过相应器件的制备与初步实验研究,将仿真结果和实验数据进行比较分析。结果表明,所设计的基于组合结构的双界面液体透镜仿真和实验的变焦范围基本一致,同时实验获得的变焦比可达

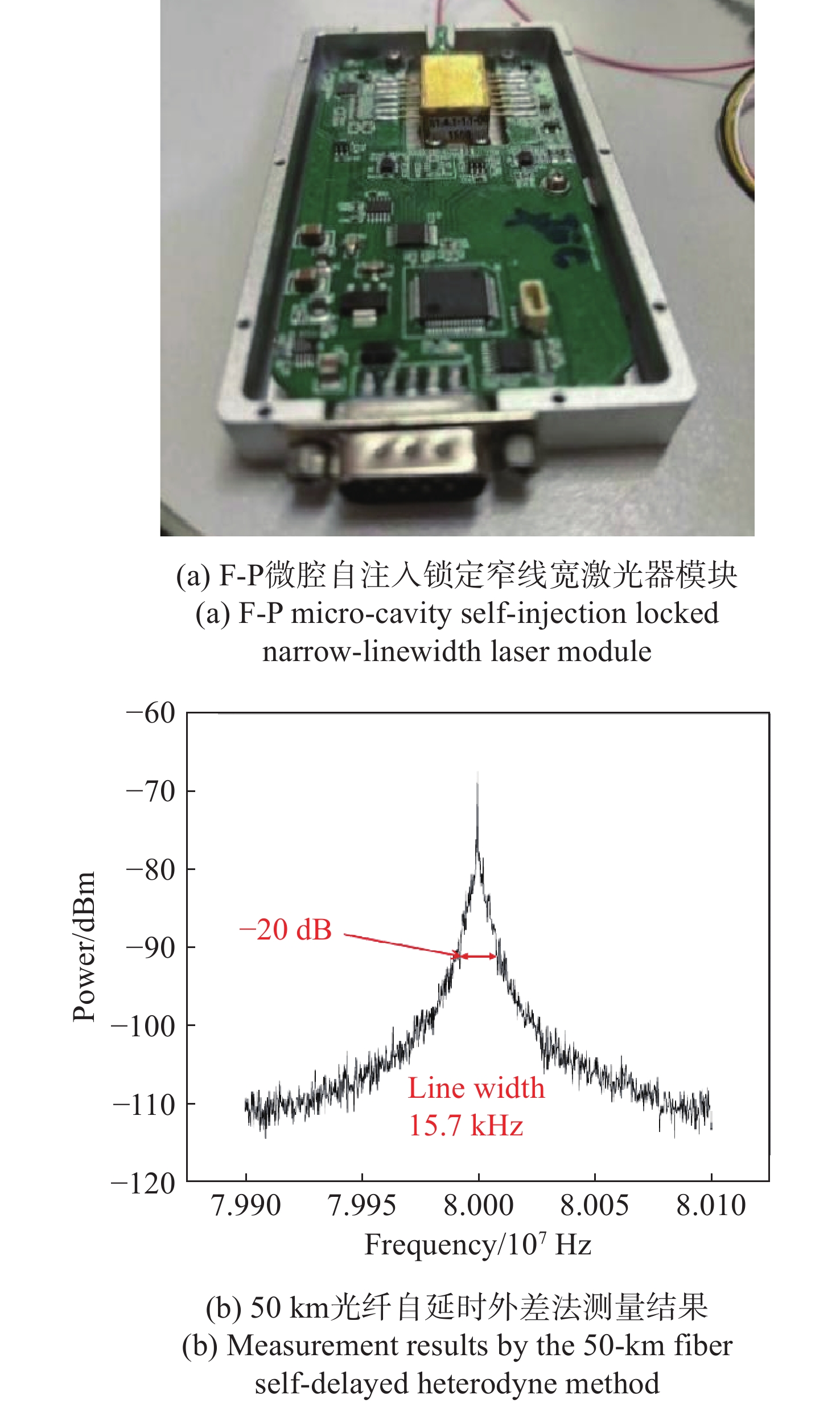
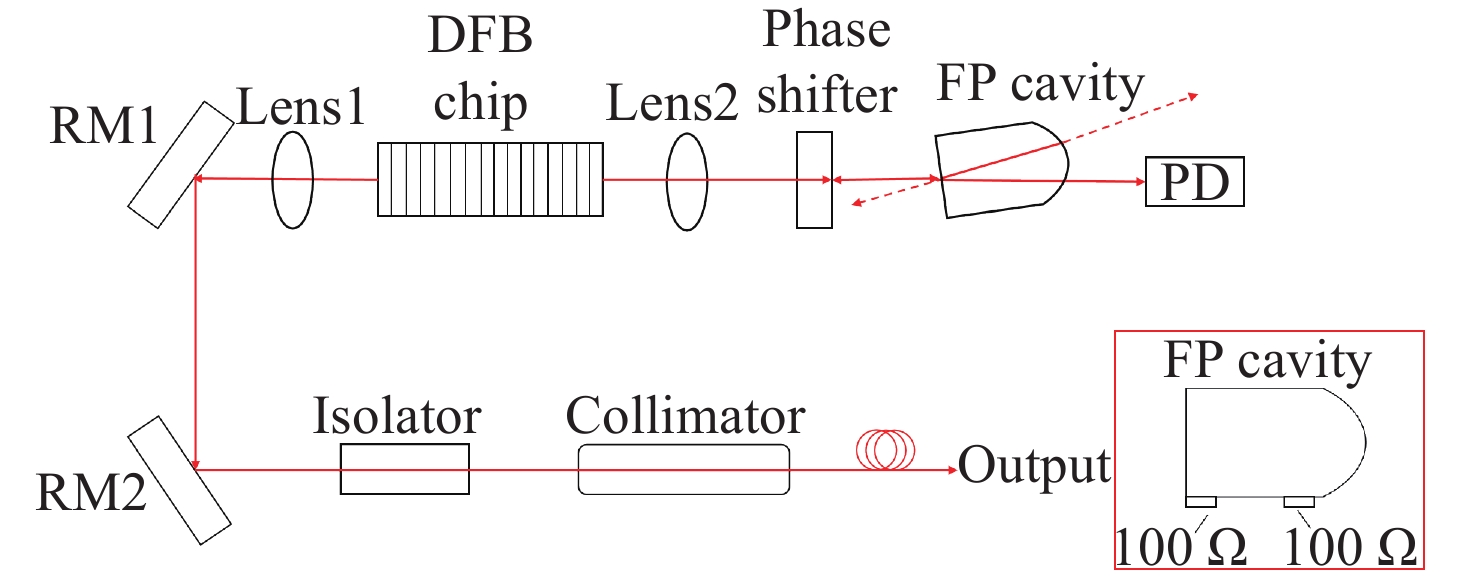
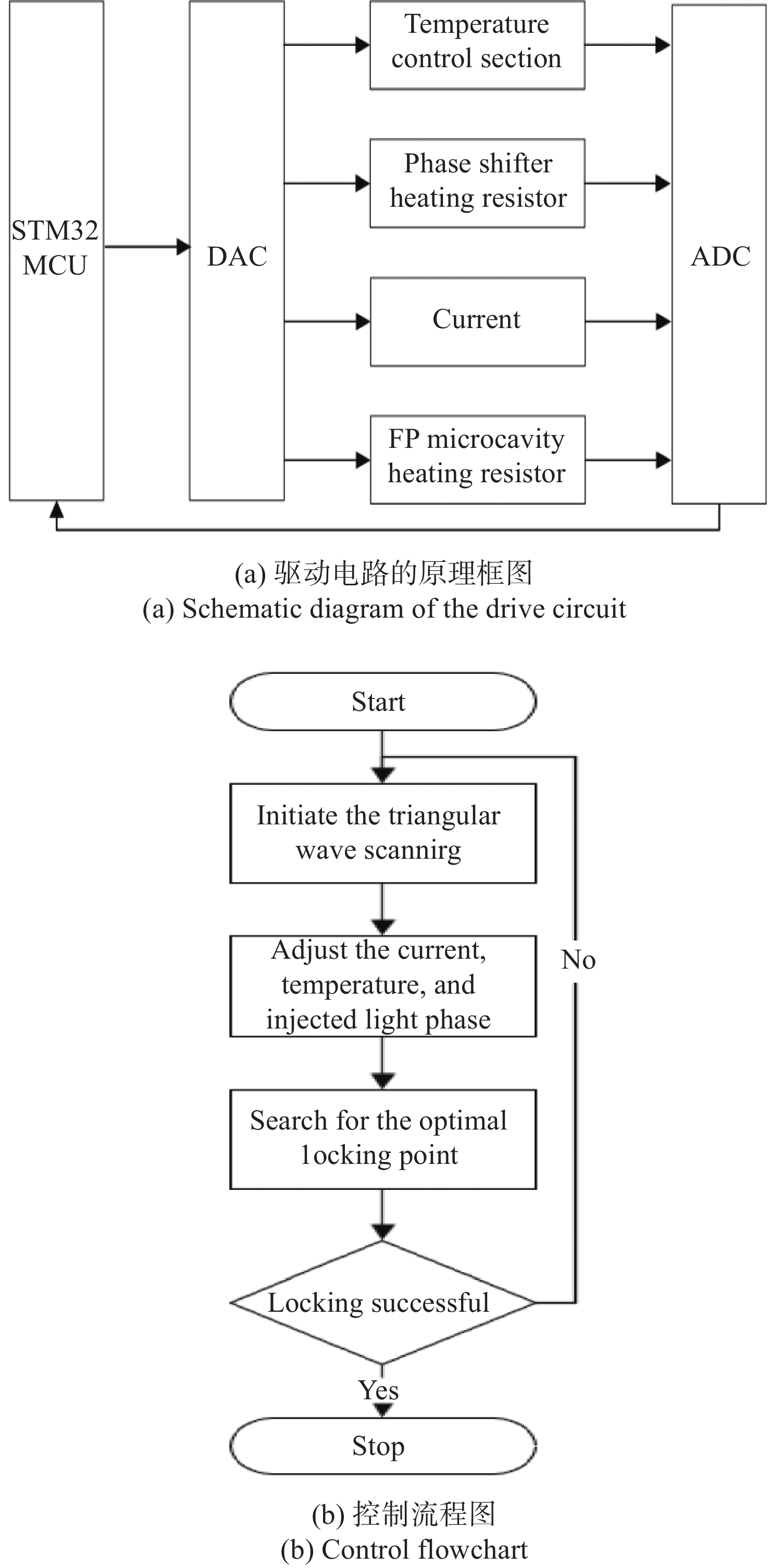
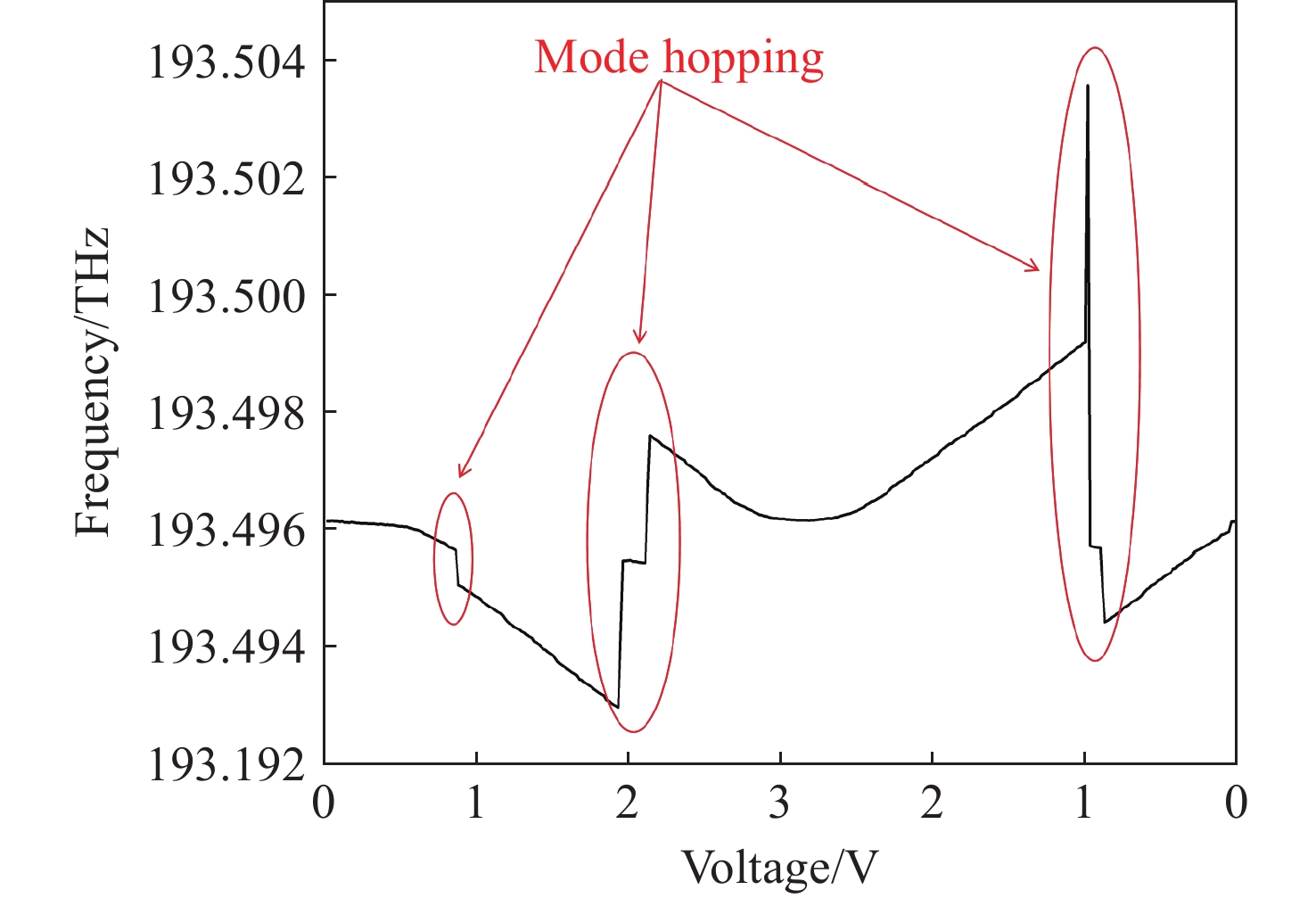
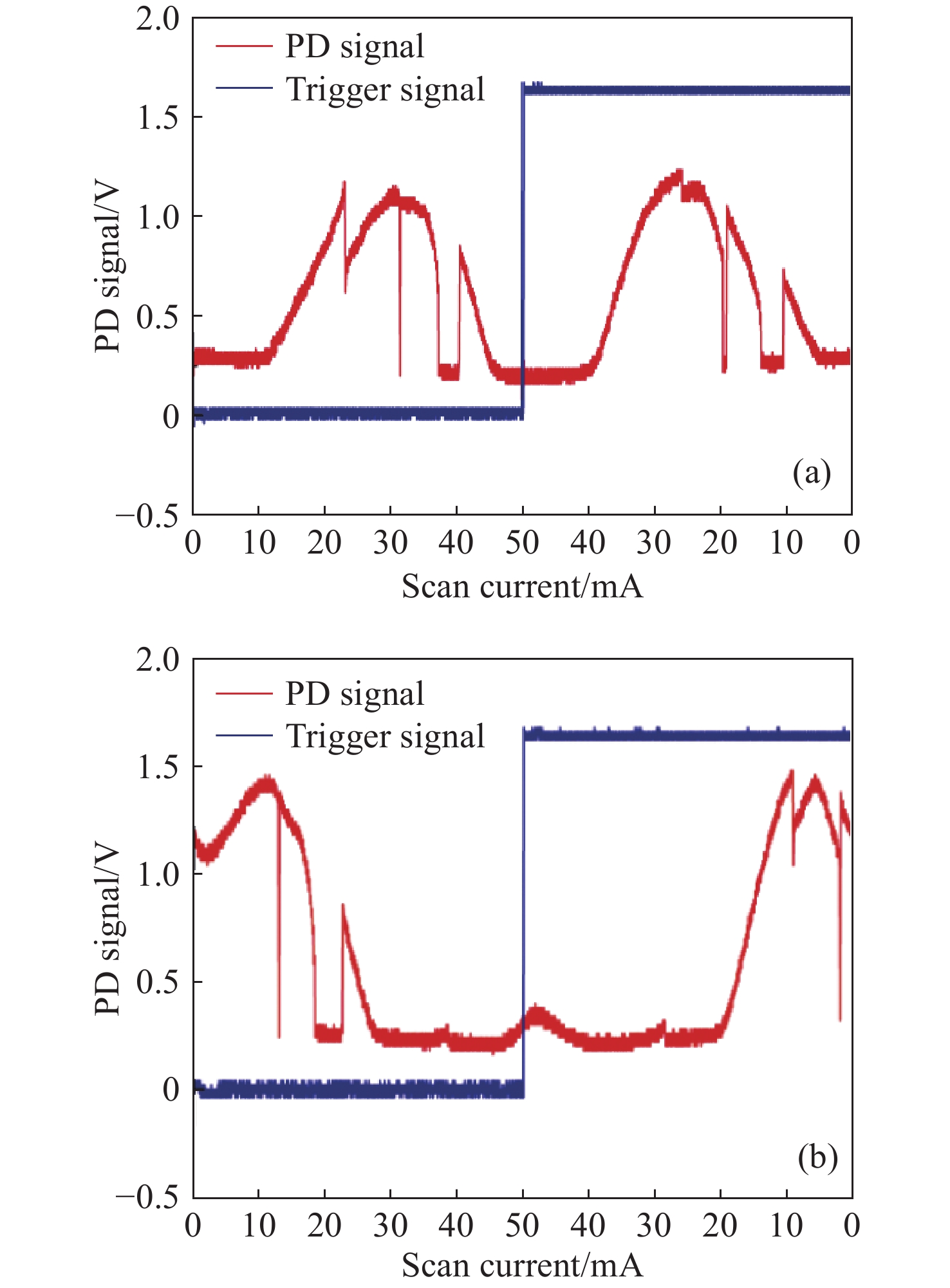
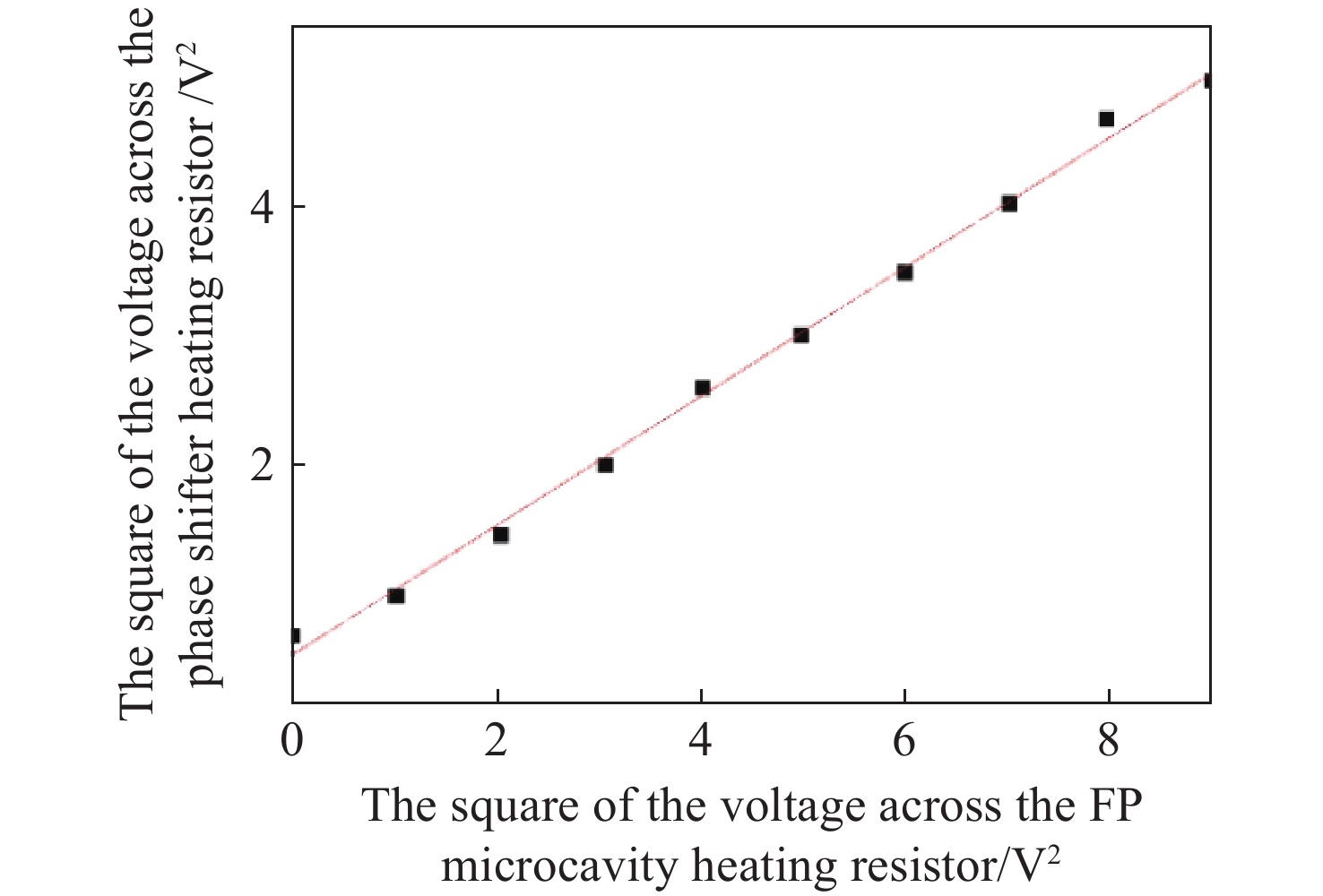
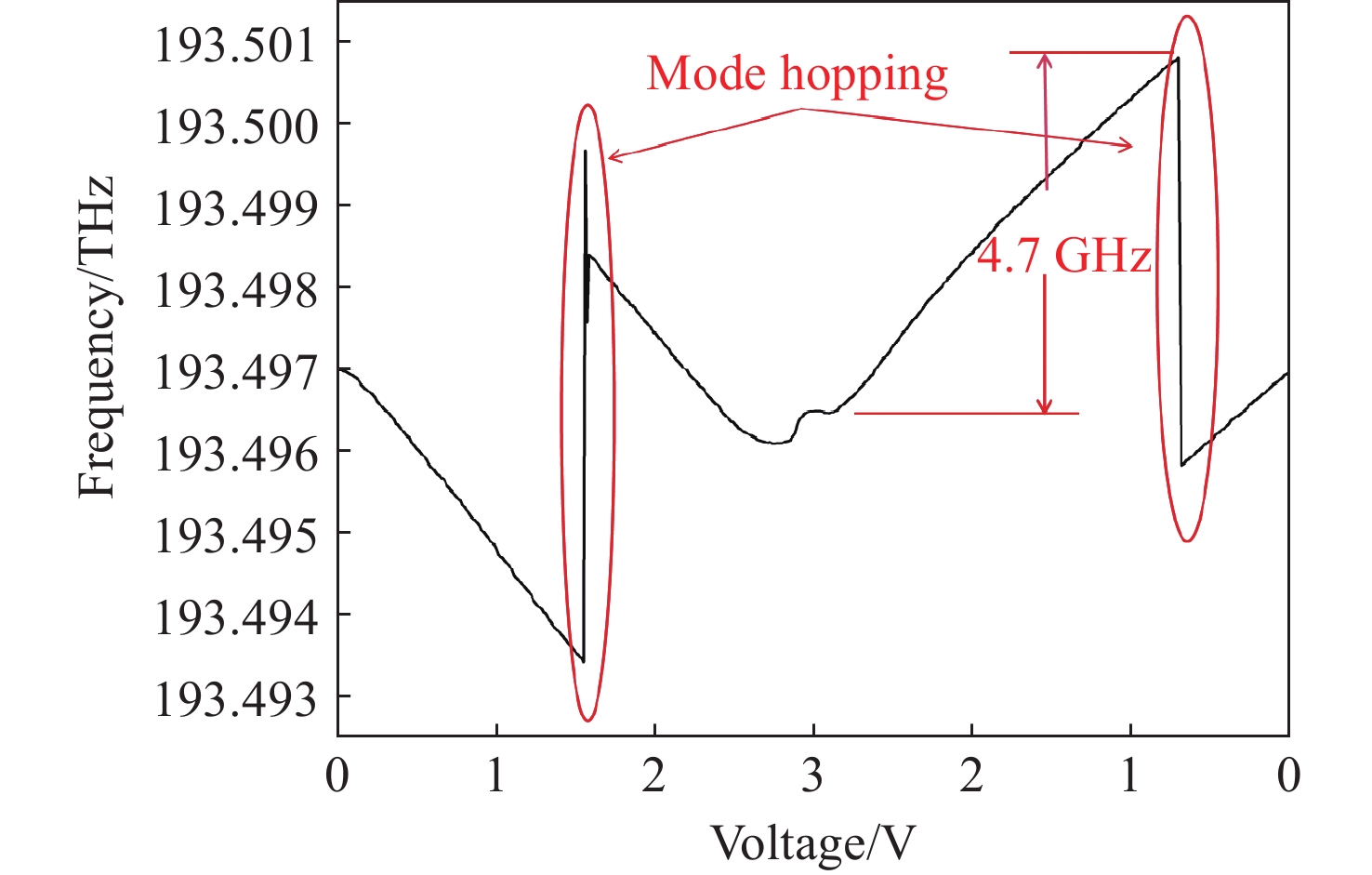
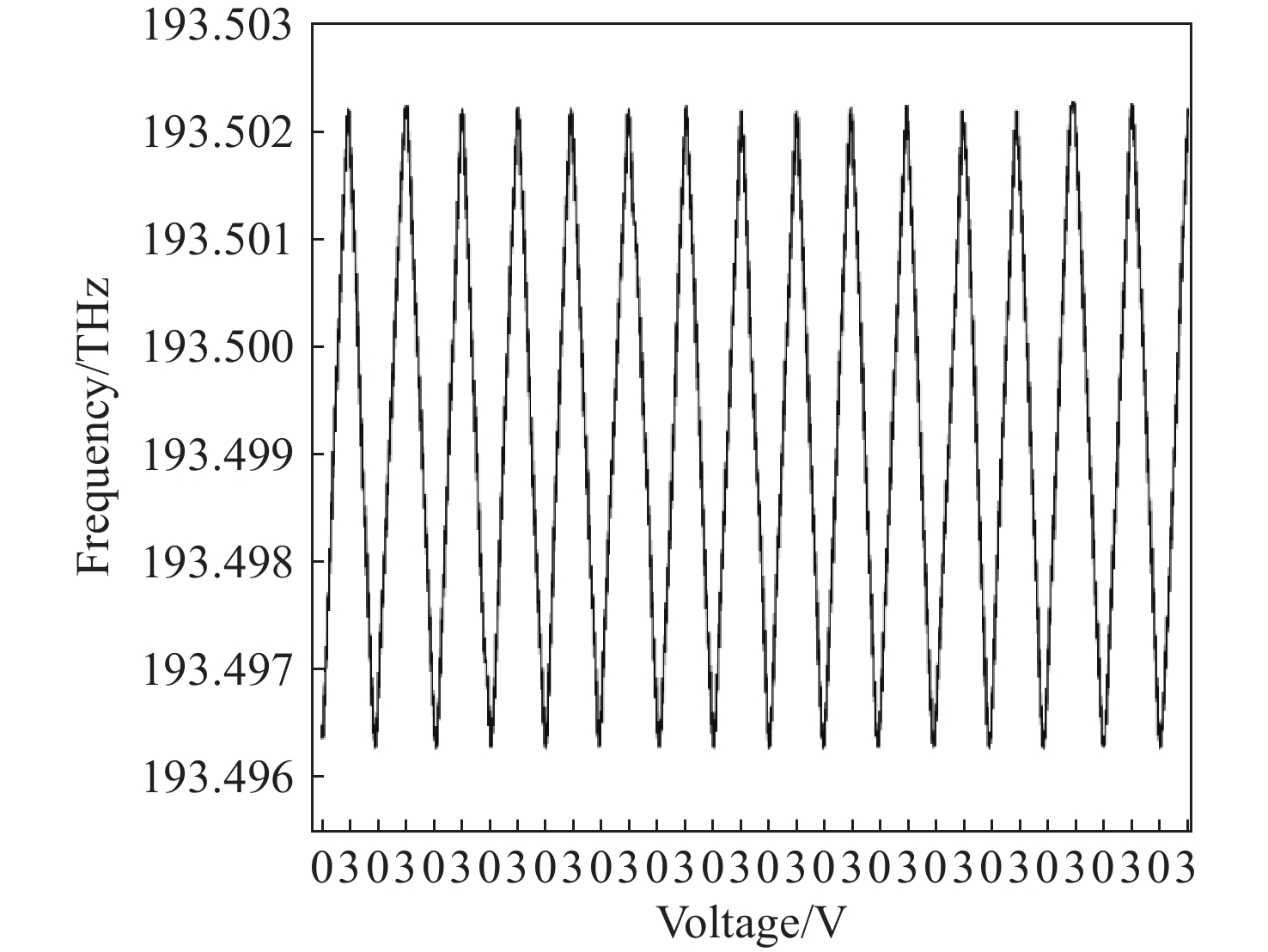
为了提高自注入锁定激光器的频率连续可调谐范围,对法布里-珀罗(FP)微腔在频率热调谐过程中注入锁定相位的变化关系进行研究。在传统频率热调谐的基础上,对自注入锁定激光器频率和相位等参数特性进行研究,提出一种在频率热调谐时加入自注入锁定相位补偿和DFB芯片电流补偿的改进算法,并在一台基于FP微腔自注入锁定激光器上对此算法进行验证实验。这台激光器的波长为
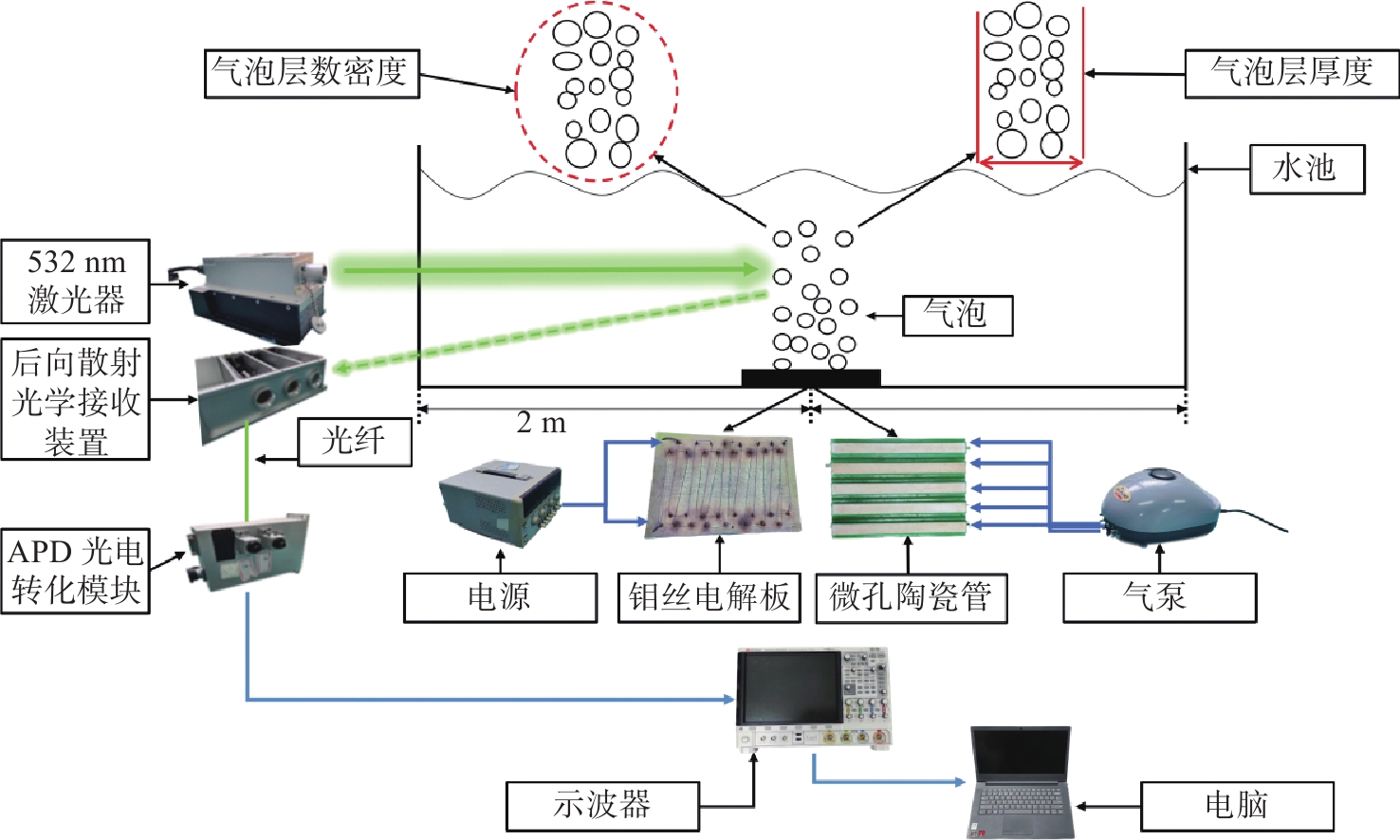
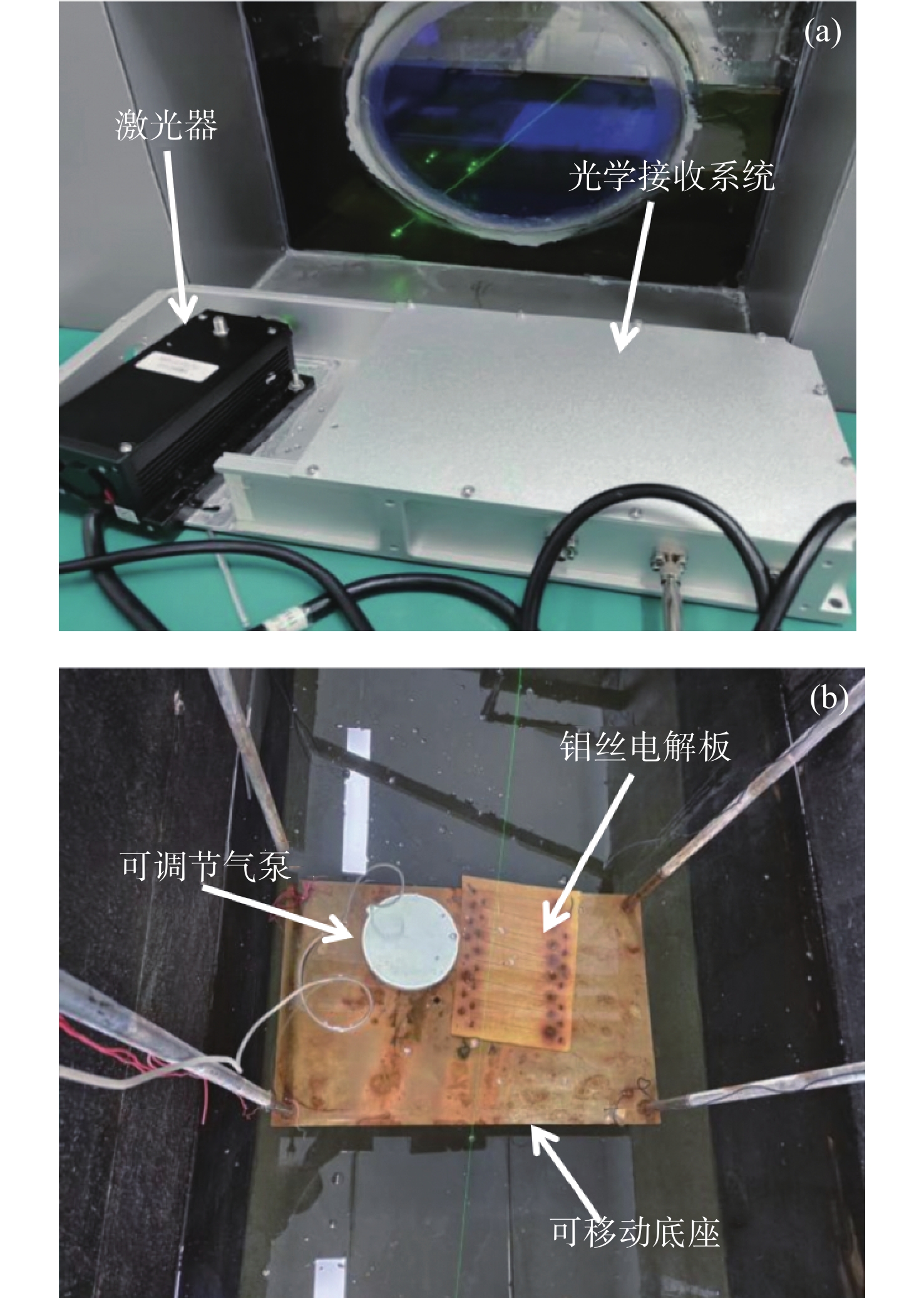
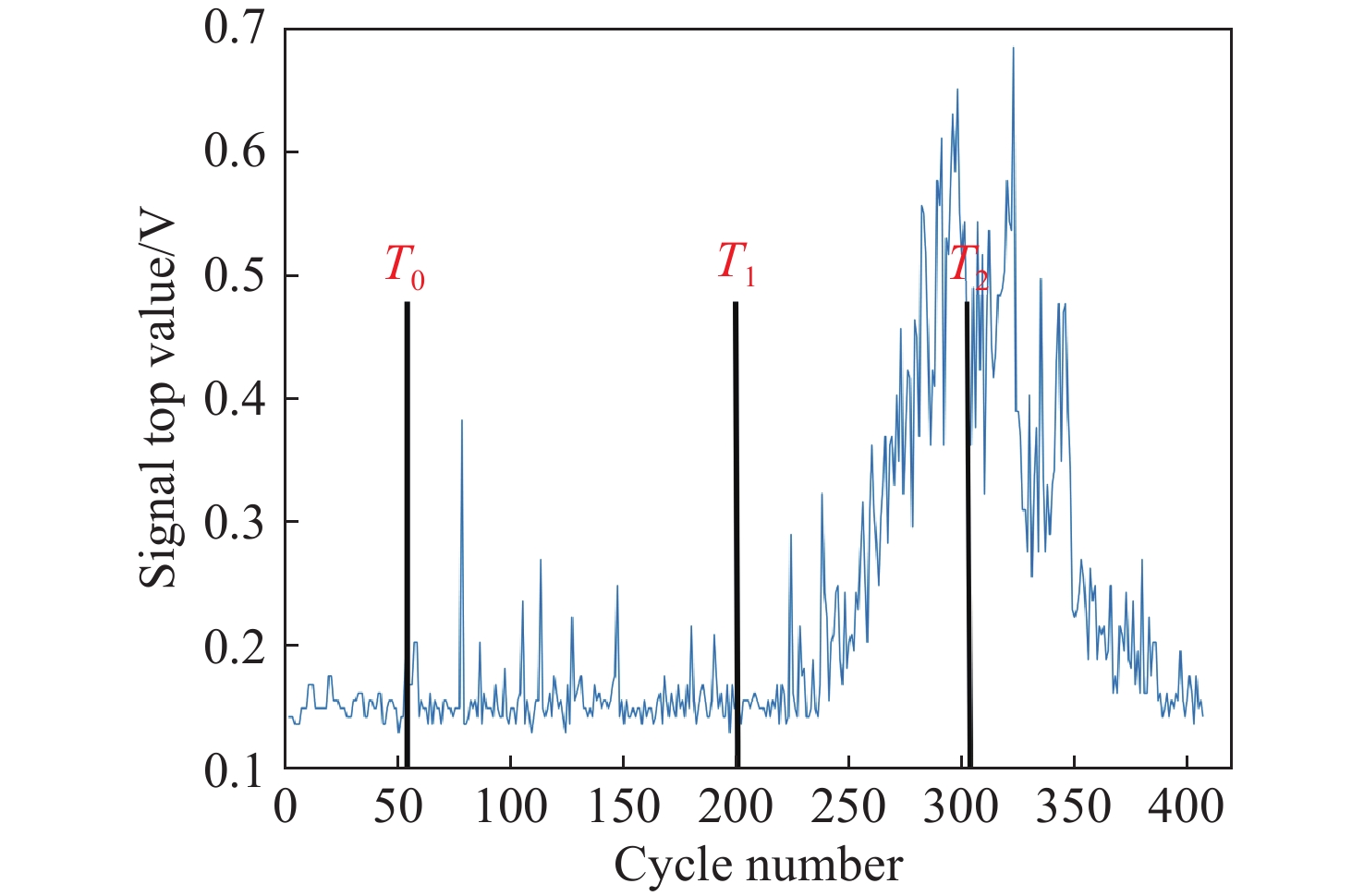
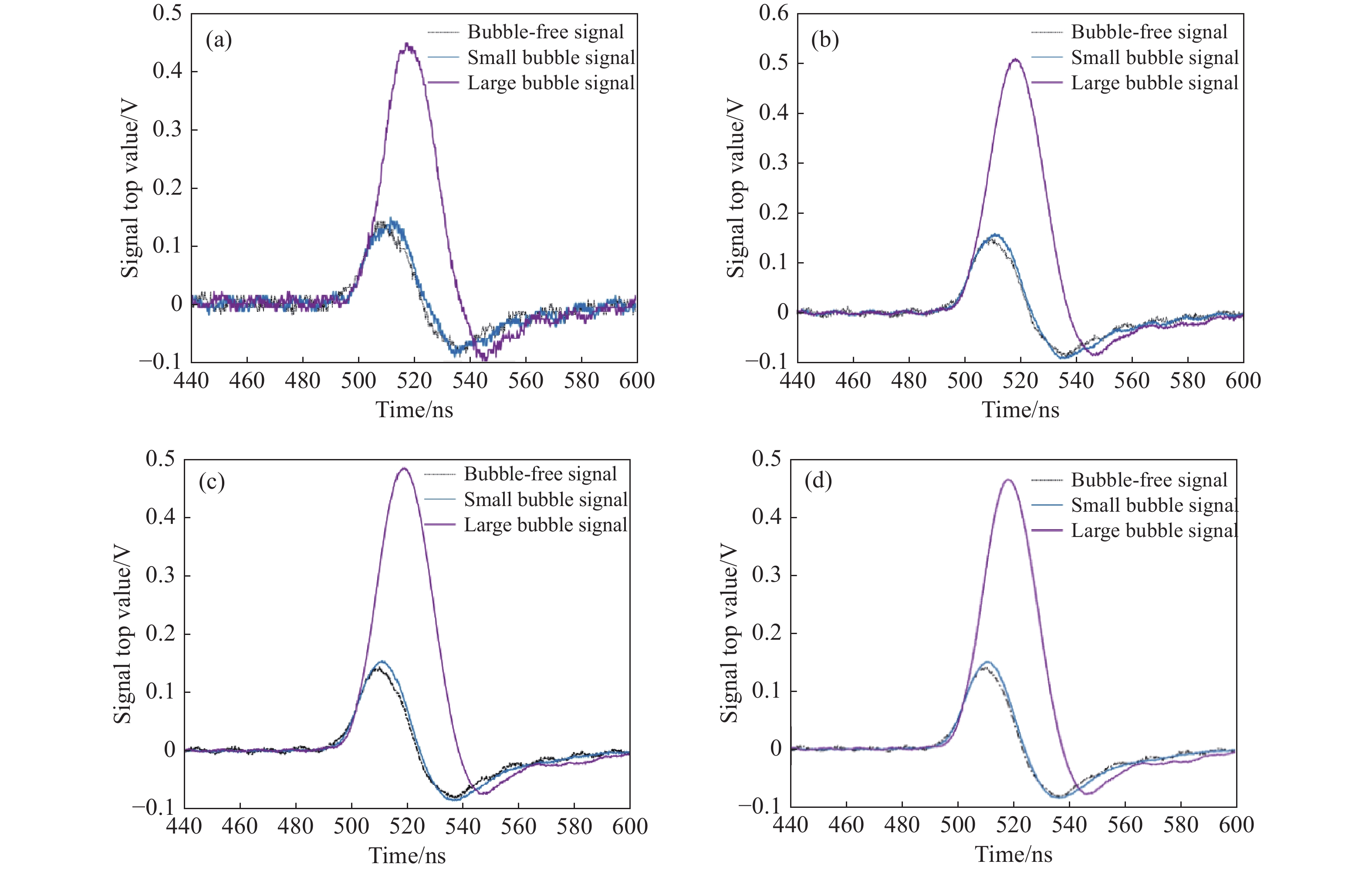
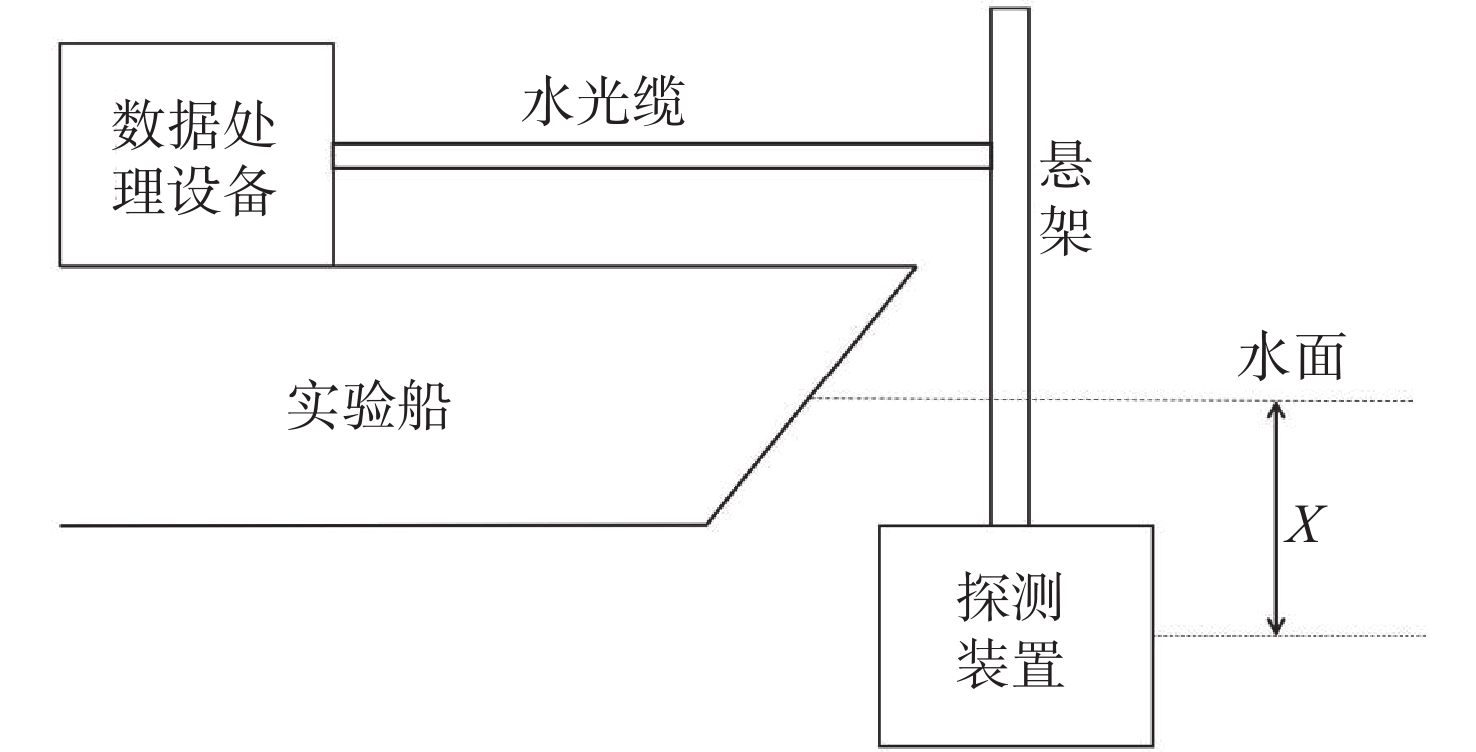
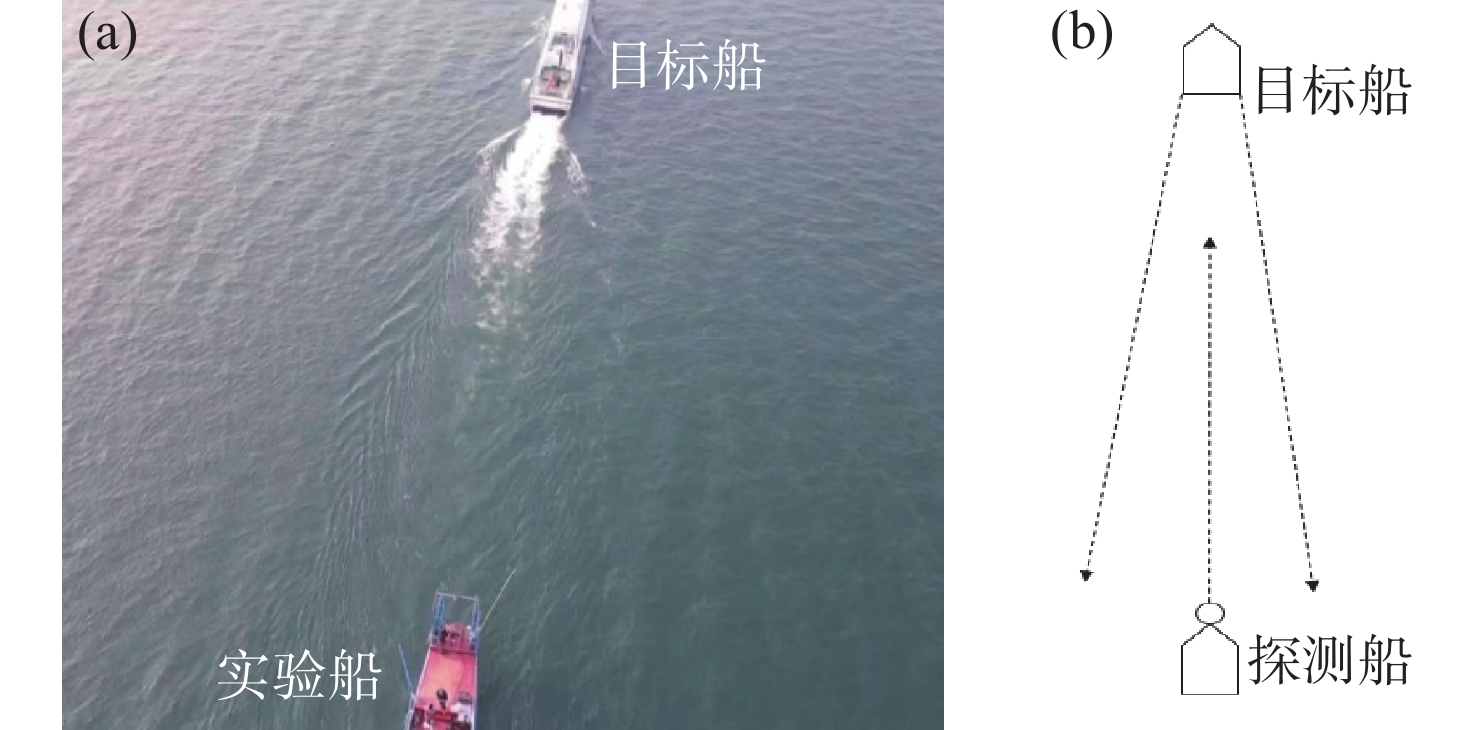
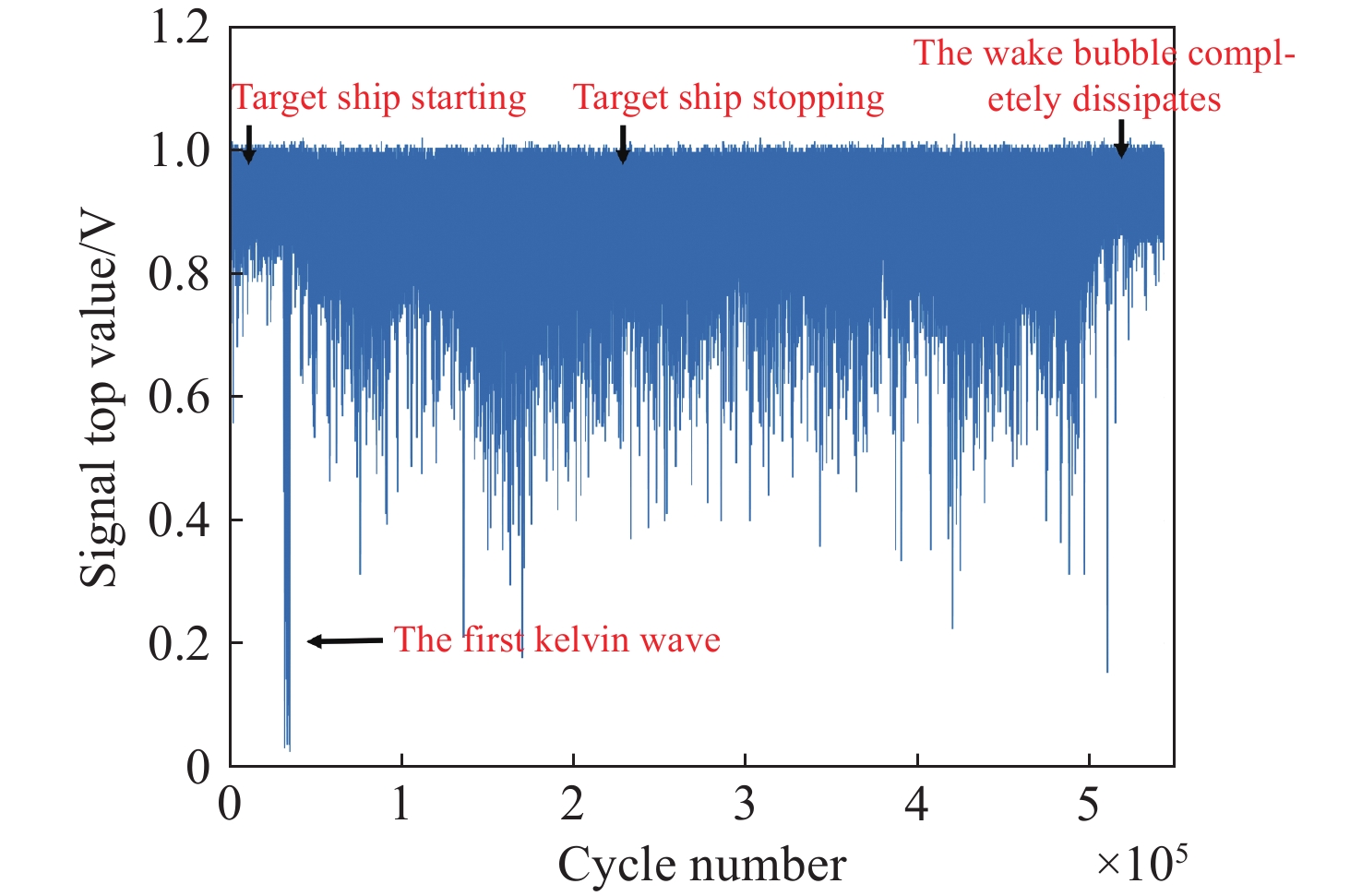
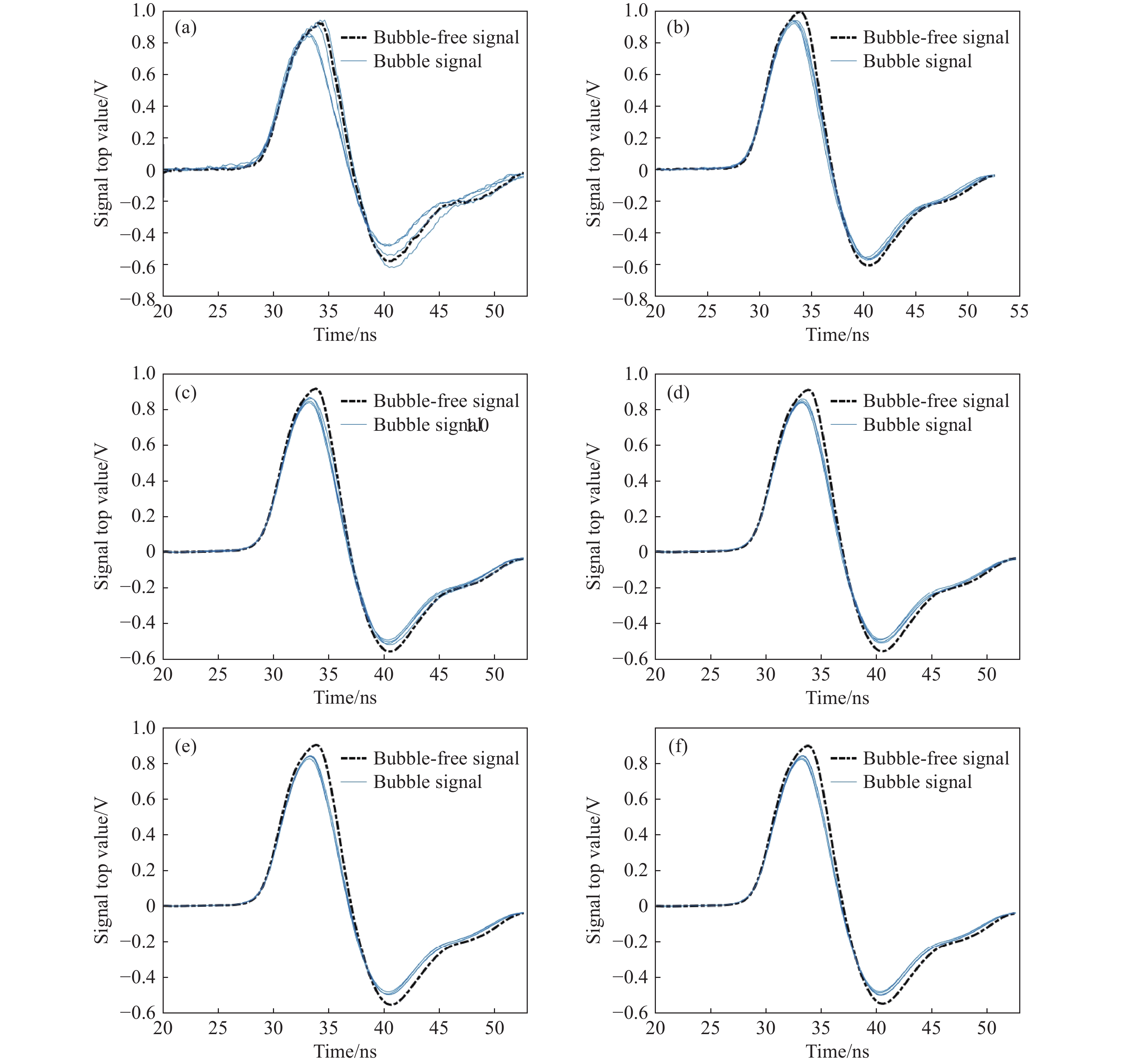
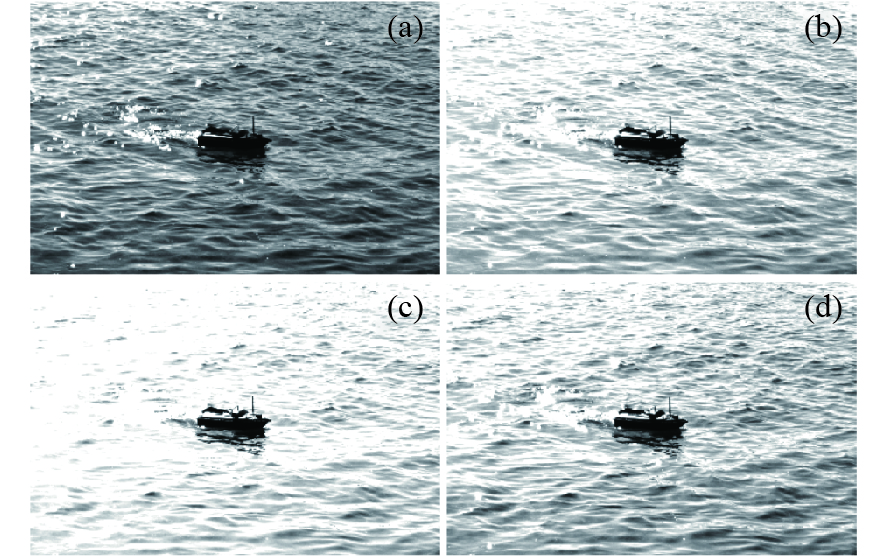
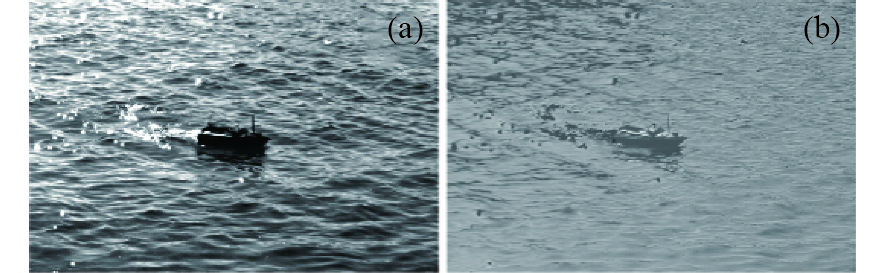
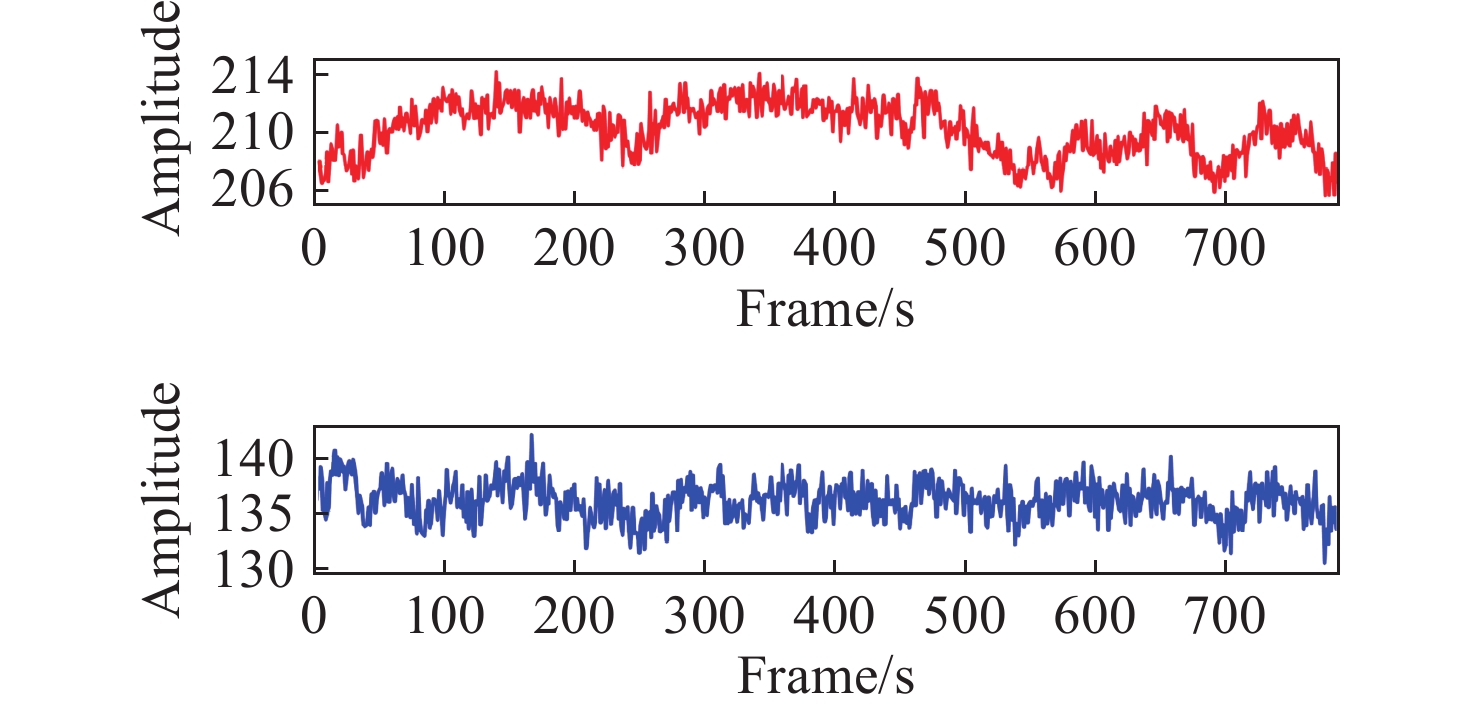
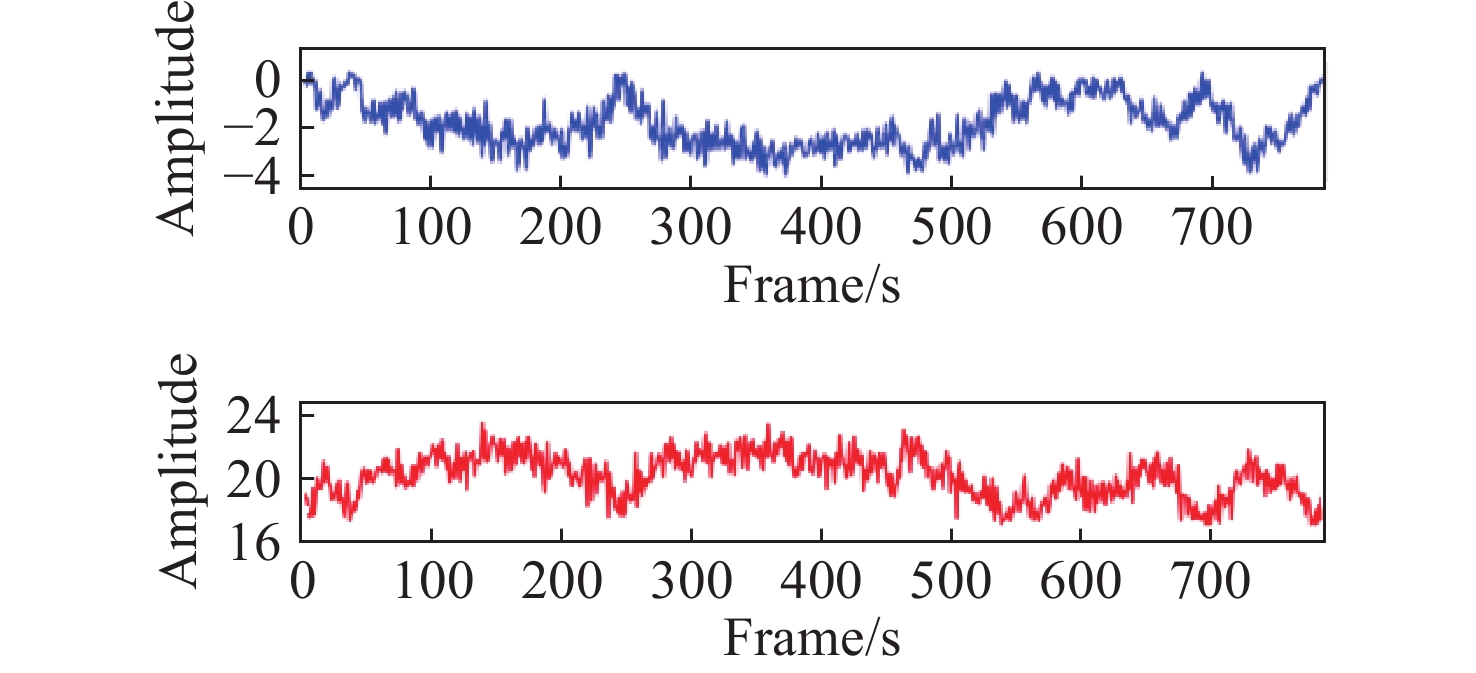
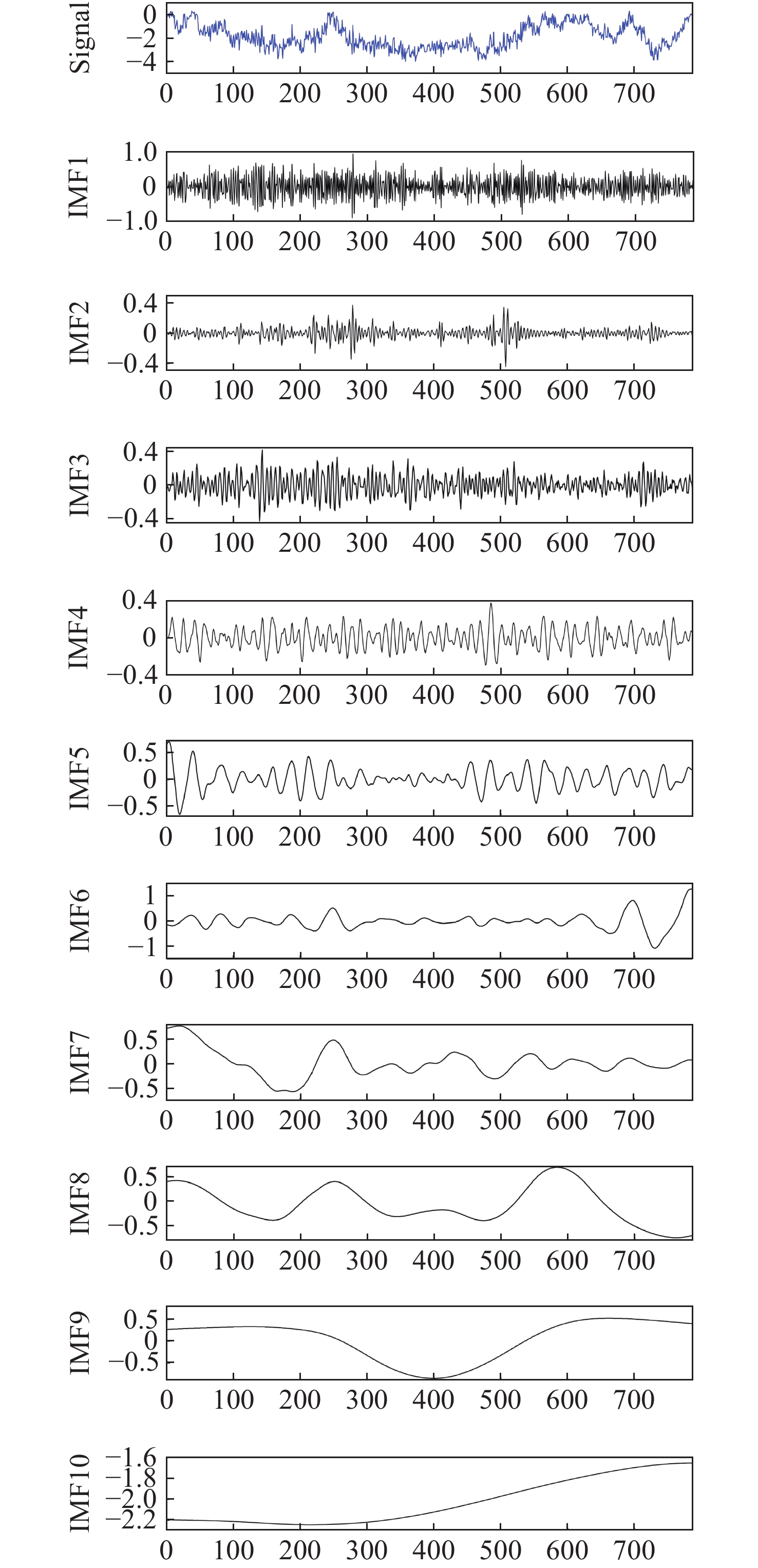
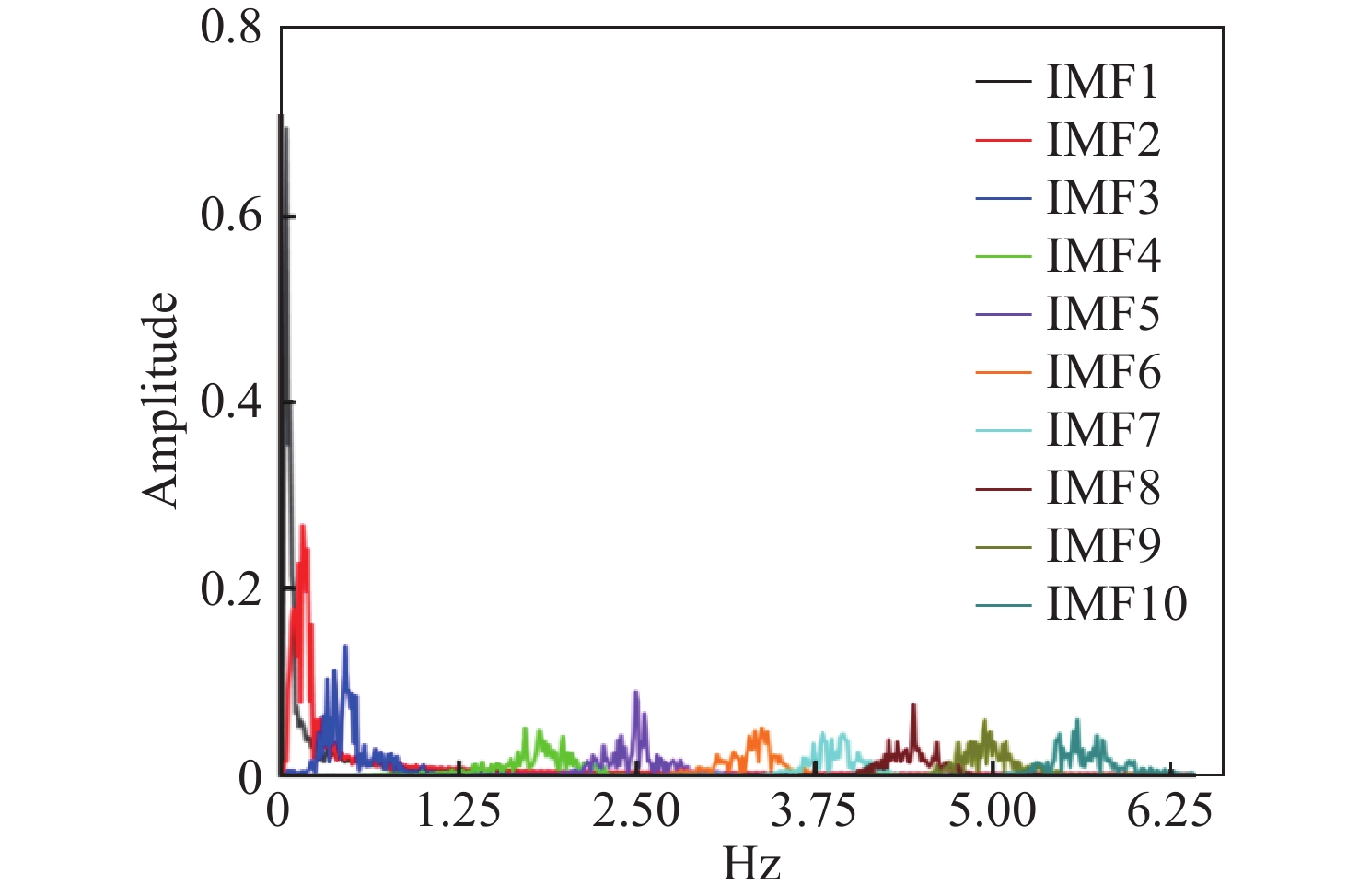
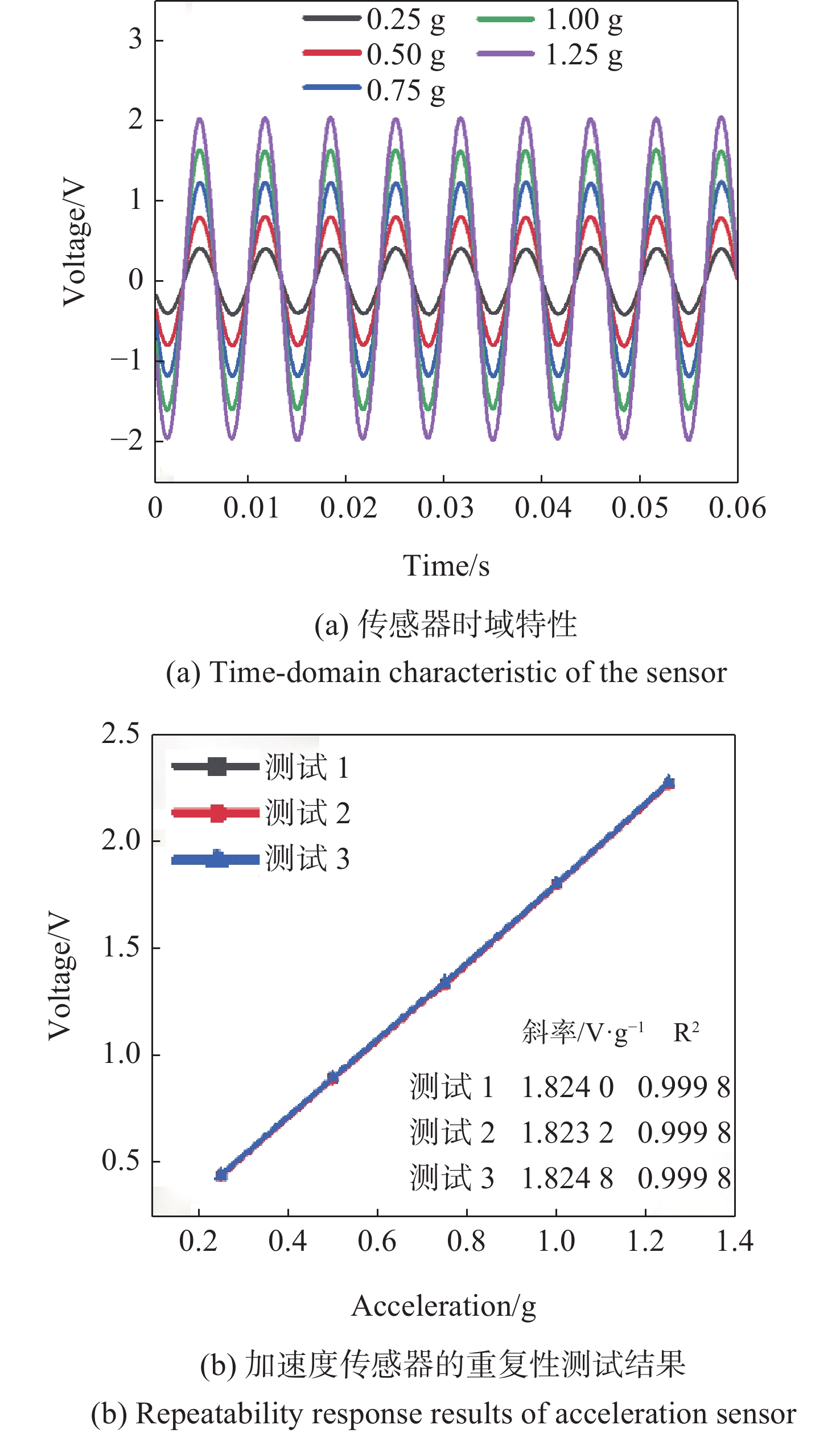
为适应复杂的动态变化的尾流气泡场环境,提高水下探测装置对舰船尾流微弱信号的探测信噪比与检出率,本文提出了一种基于同步累积法的舰船尾流微弱信号检测方法。利用周期信号的重复性与噪声的随机性,对连续多个周期信号做累积归一化处理,降低随机噪声对探测性能的干扰,提升探测信噪比。建立了针对舰船尾流微弱信号多时间尺度检测能力评估模型,评估本方法在多参量耦合下的探测性能。通过在室内水池、室外湖泊条件下开展大量模拟舰船尾流探测实验,验证了该方法适配稀疏微小的远场尾流气泡至高湍流扰动下的大尺度近场气泡检测。本文方法可实现全时域舰船尾流的跟踪检测,有效提升水下兵器的打击能力,为舰船尾流激光探测识别工程实践提供支撑。
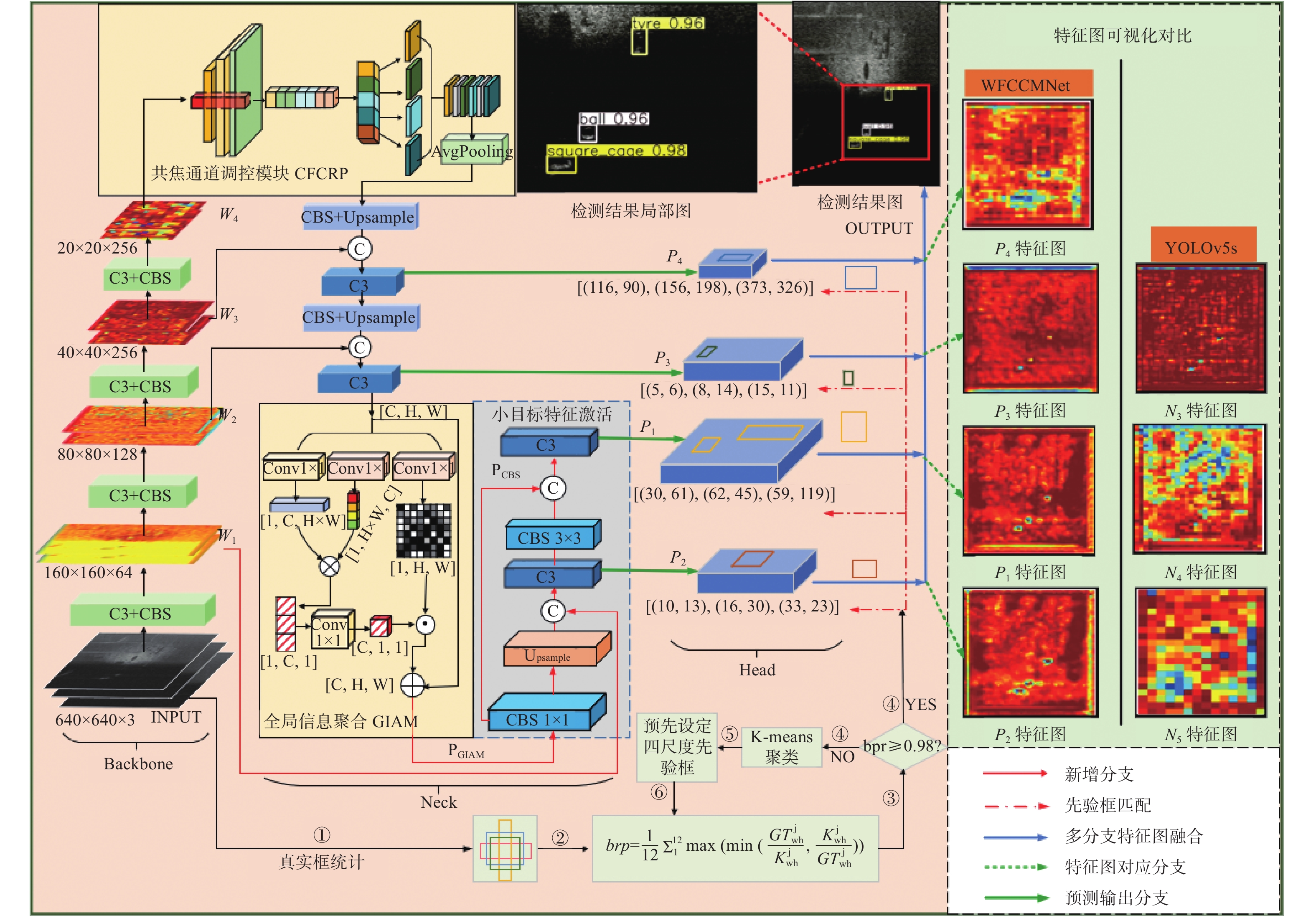
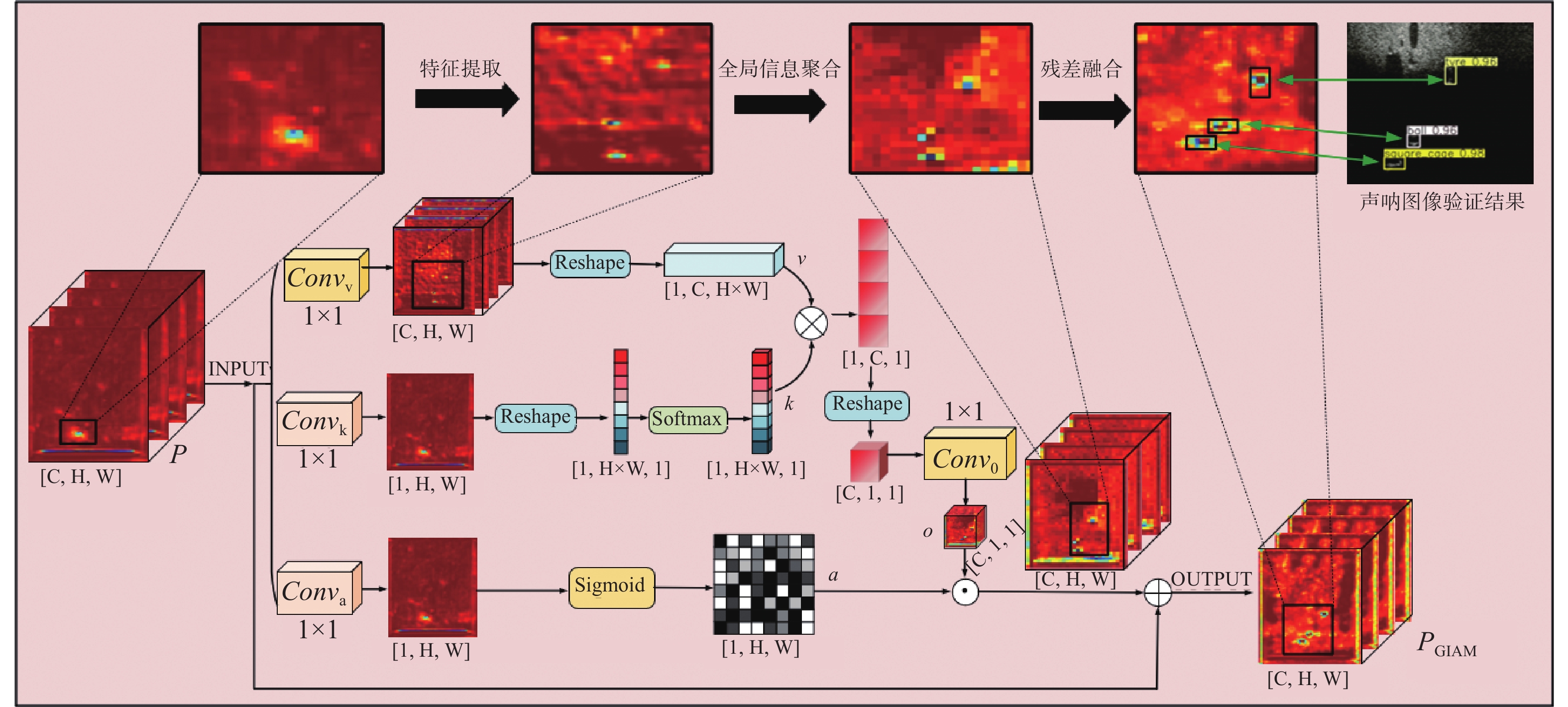
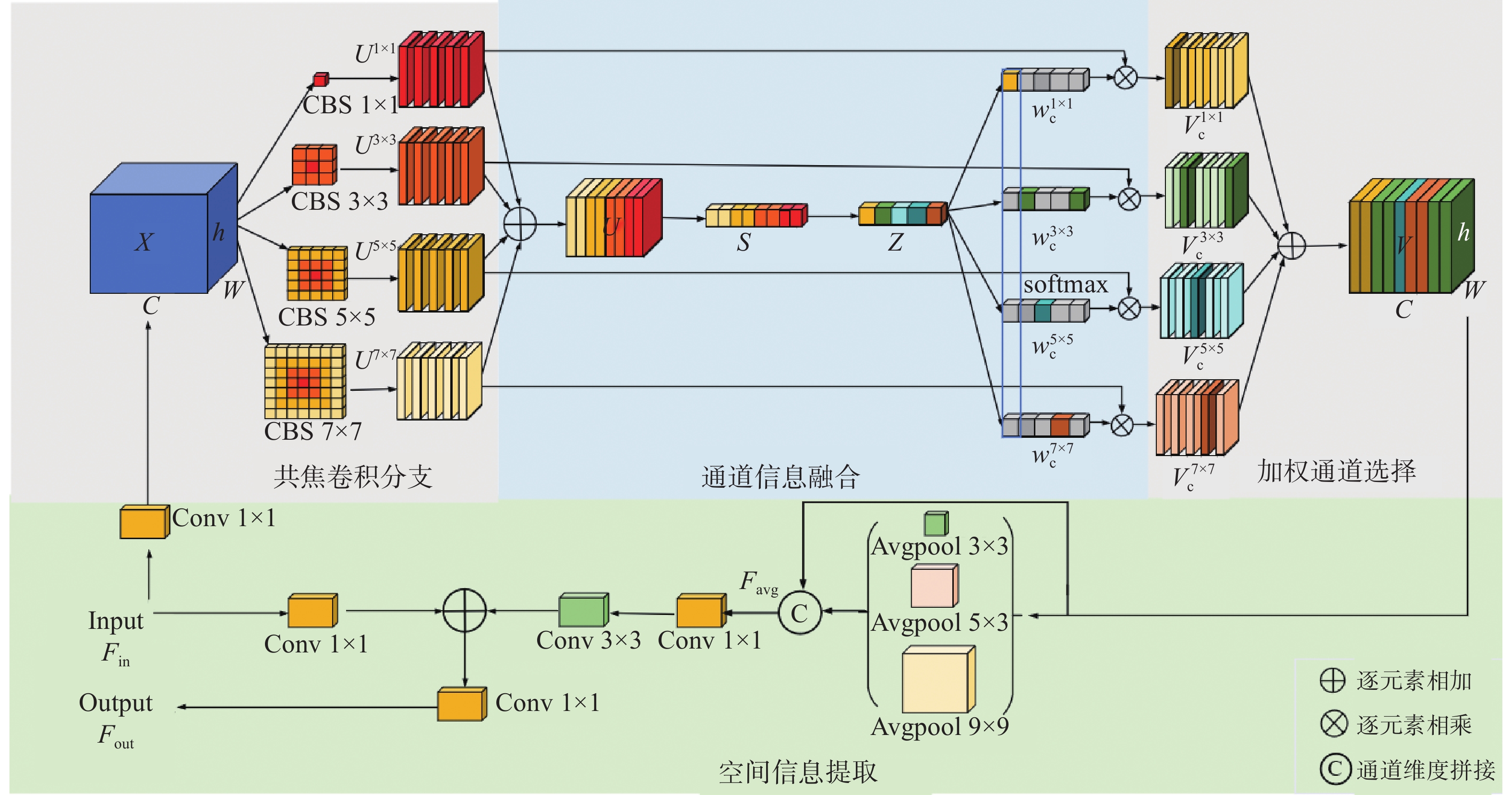
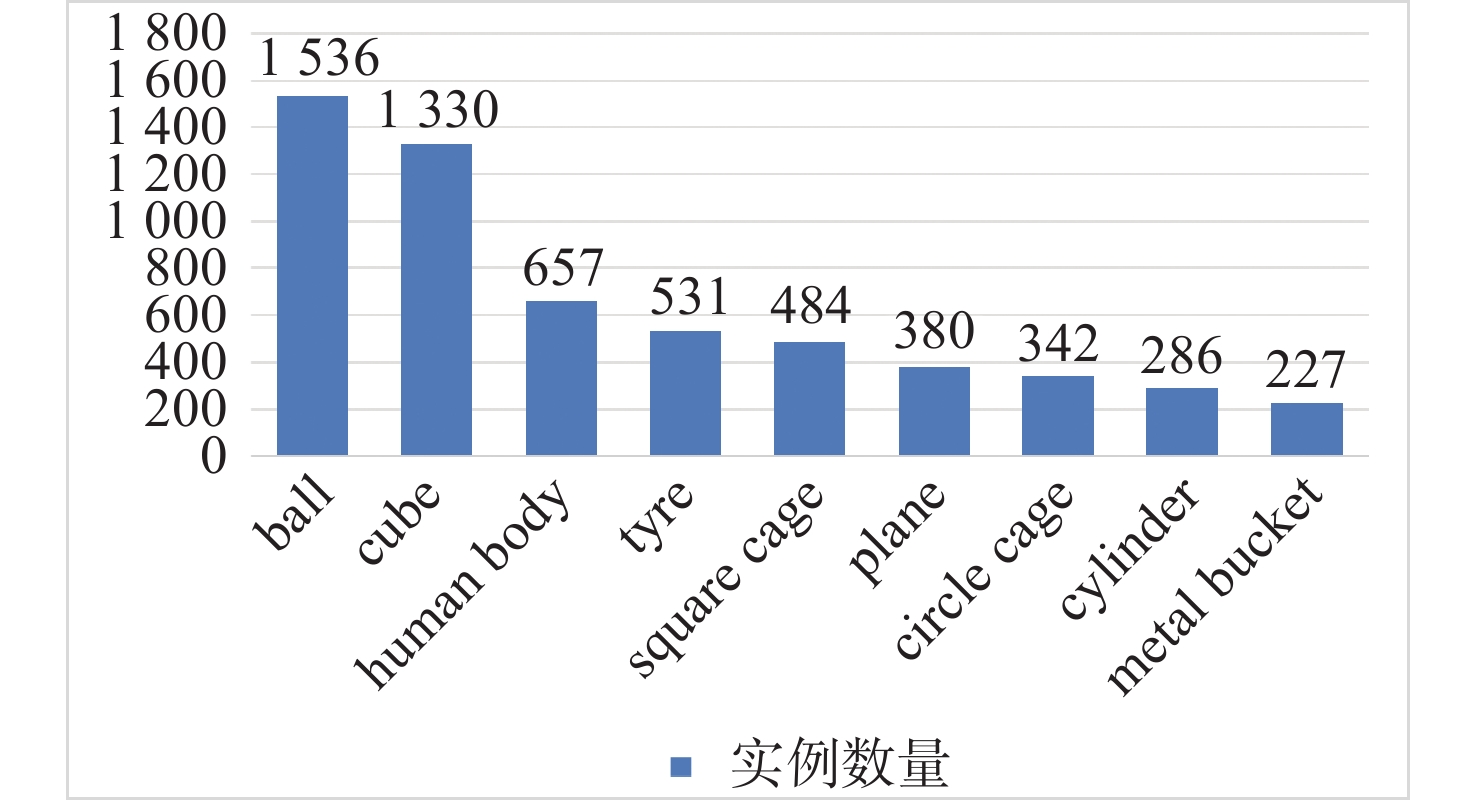
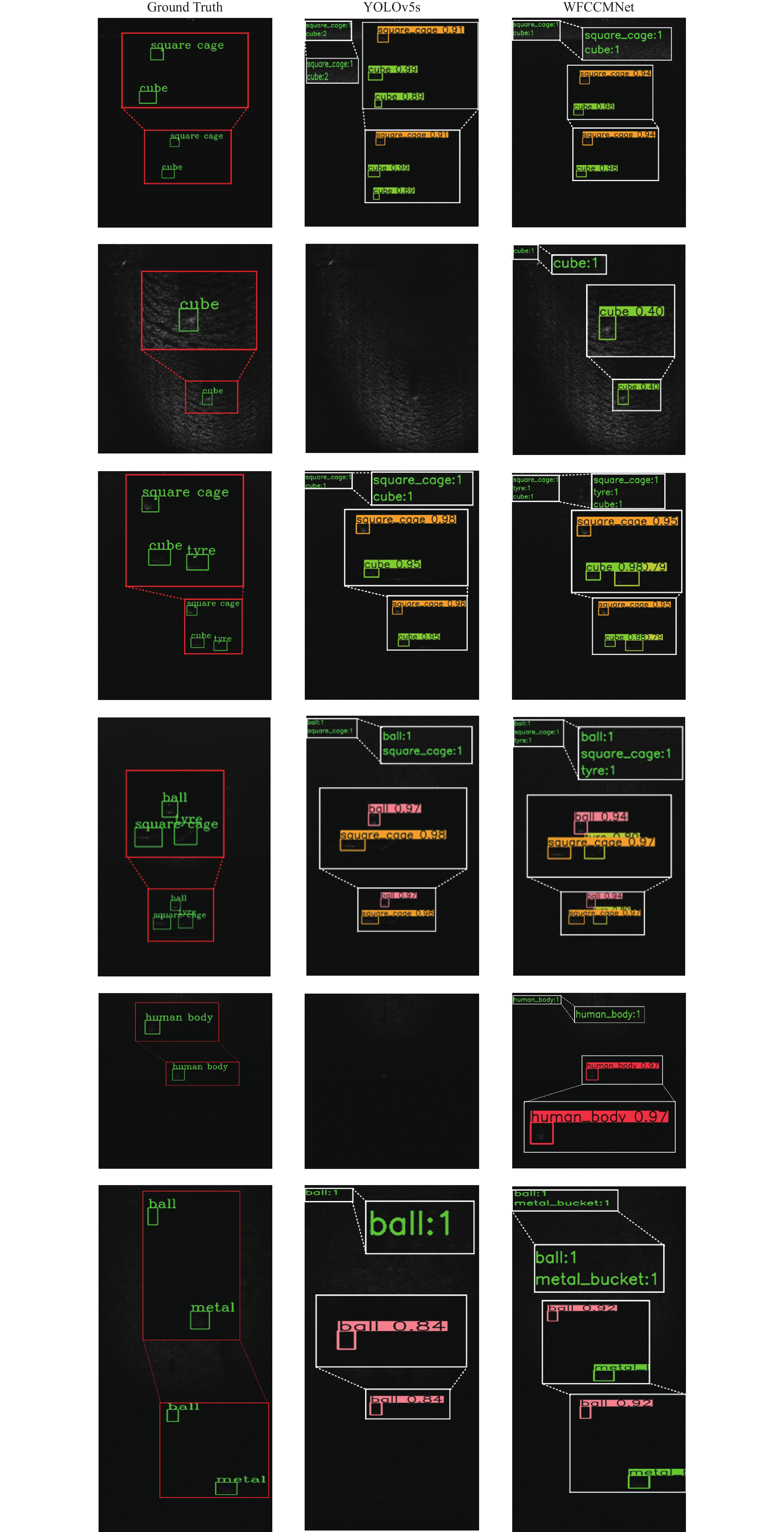
声呐图像视觉检测是复杂水域资源勘探和水下异物目标探测领域的重要技术之一。针对声呐图像中小目标存在的特征微弱和背景信息干扰问题,本文提出弱特征共焦通道调控水下声呐目标检测算法。为了提高模型对弱小目标的信息捕获和表征能力,设计弱小目标特征激活策略,并引入先验框尺度校准机制匹配底层语义特征检测分支,以提高小目标检测精度。应用全局信息聚合模块深入挖掘弱小目标的全局特征,避免冗余信息覆盖小目标微弱关键特征。为解决传统空间金字塔池化易忽视通道信息的问题,提出共焦通道调控池化模块,保留有效通道域小目标信息并克服复杂背景信息干扰。实验结果表明,本文所提模型在水下声呐数据集的9类弱小目标识别的平均检测精度达83.3%,相较基准提高了5.5%,其中铁桶、人体模型和立方体检测精度得到显著提高,分别提高24%、8.6%和7.3%,有效改善水下复杂环境中弱小目标漏检和误检问题。
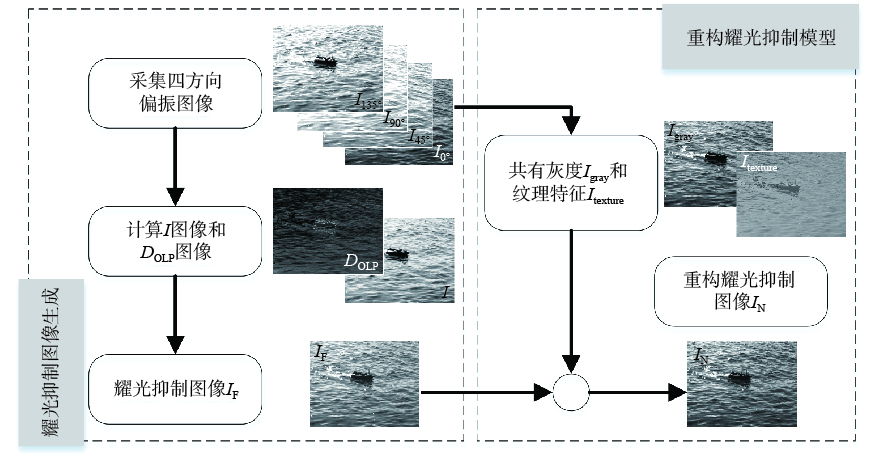
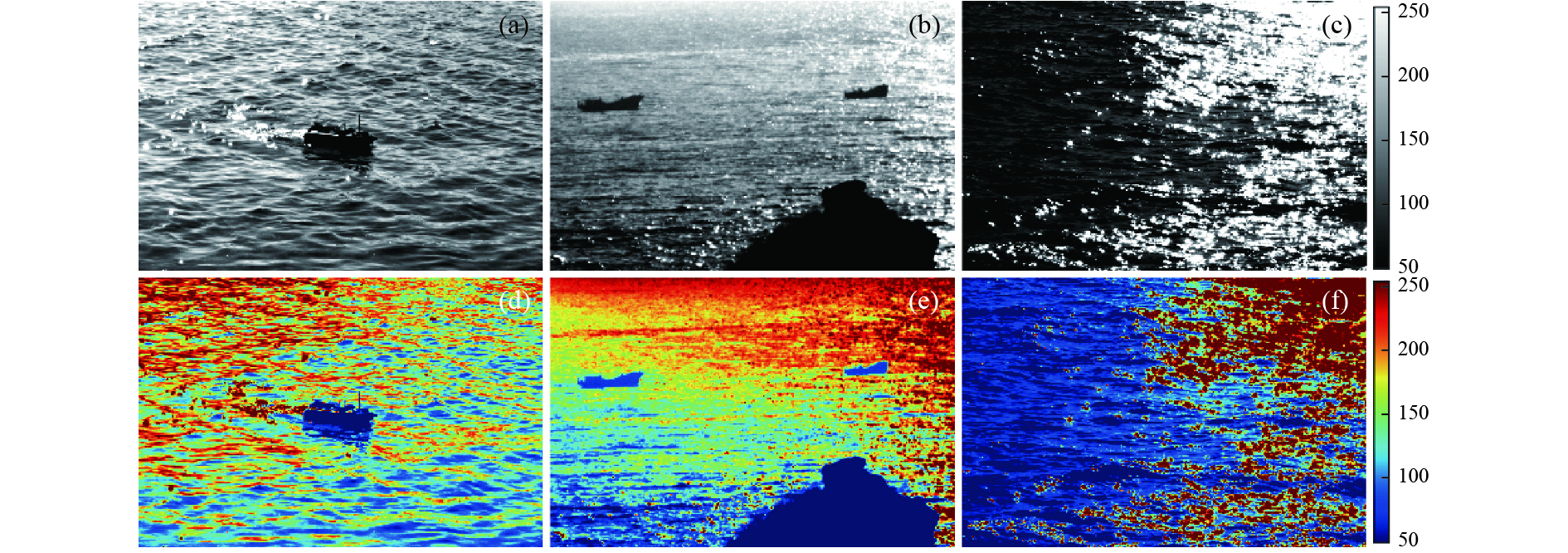
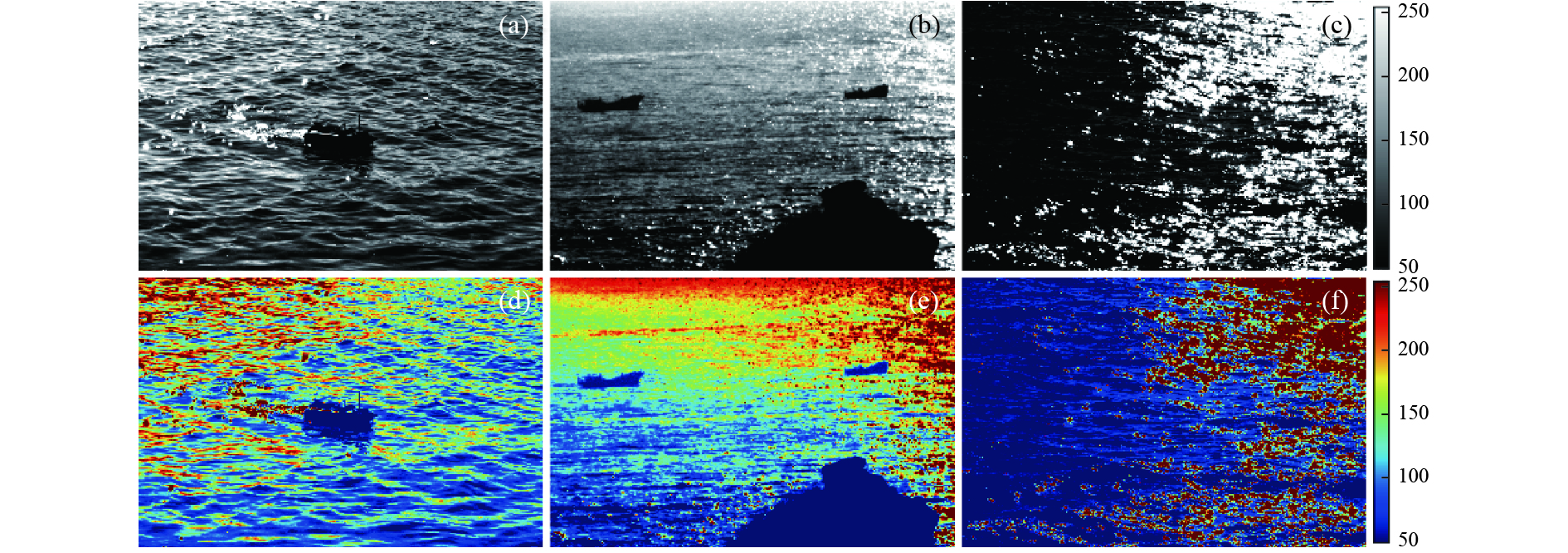
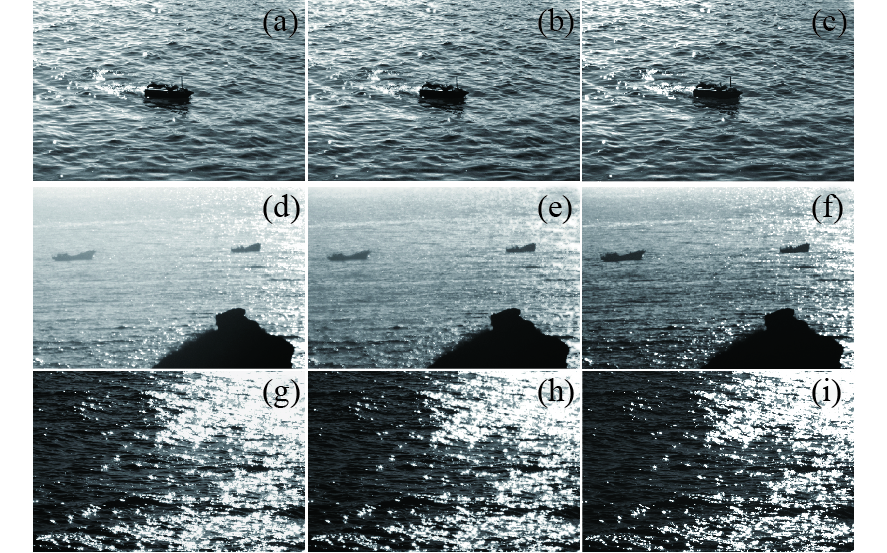
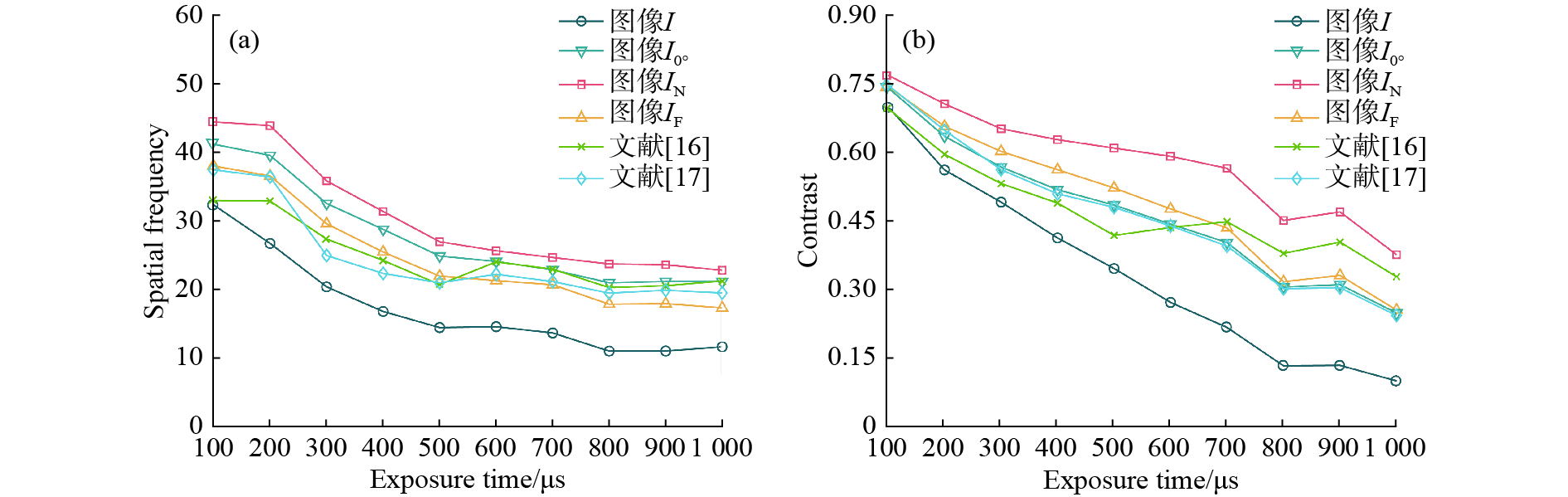
太阳耀光是海面目标探测过程中的重要影响因素,本文针对陆地观测平台,利用耀光的偏振特性,提出一种基于线偏振图像共有成分与特征成分重构的海面耀光抑制方法。该方法利用分焦平面偏振相机获取四通道线偏振辐射图像,计算场景的偏振度信息,生成耀光抑制图像。在以偏振信息抑制场景耀光的基础上,结合线偏振辐射图像的特点,将耀光抑制辐射图像的光强分量分解为共有成分与特征成分,重新赋予二者新的权重因子得到重构后的耀光抑制图像。外场偏振实验的结果表明,在3组典型实验数据中,重构耀光抑制图像相比于光强图像的饱和像素占比最多降低79.07%,空间频率与对比度提升可达73.77%和172.73%。本文所提方法有效抑制了海面场景中的耀光噪声且在背景细节信息恢复方面具有良好表现。


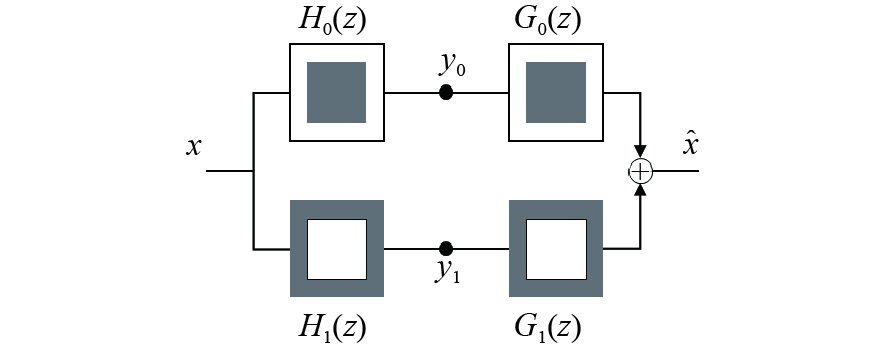
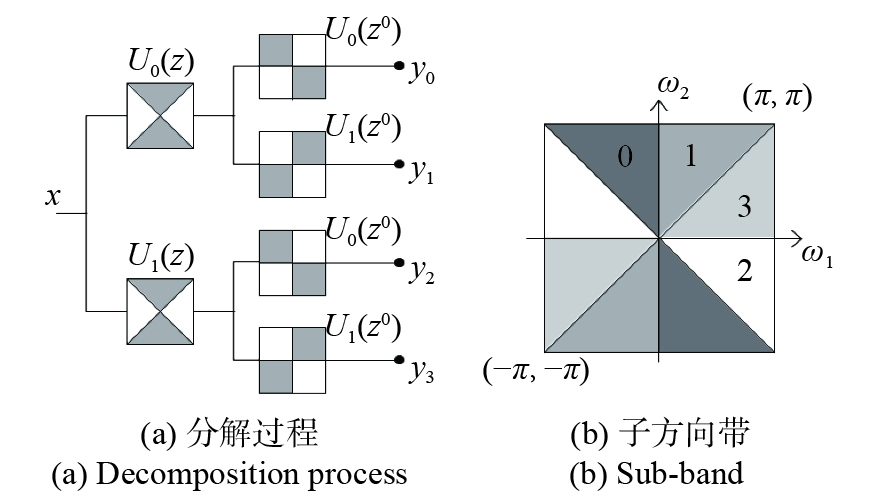
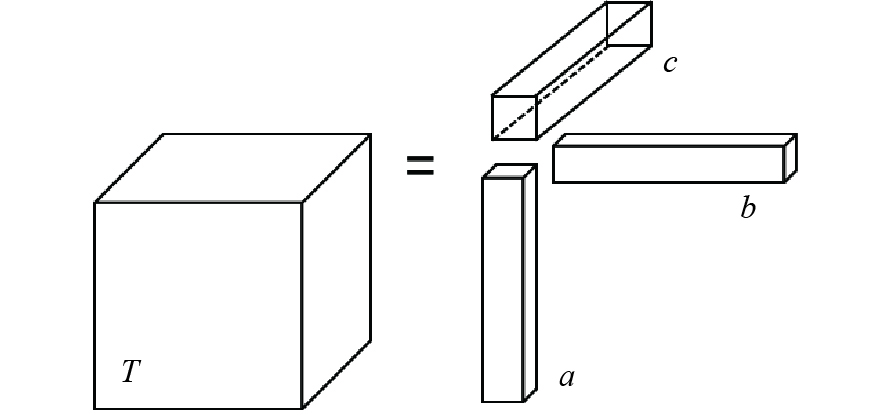
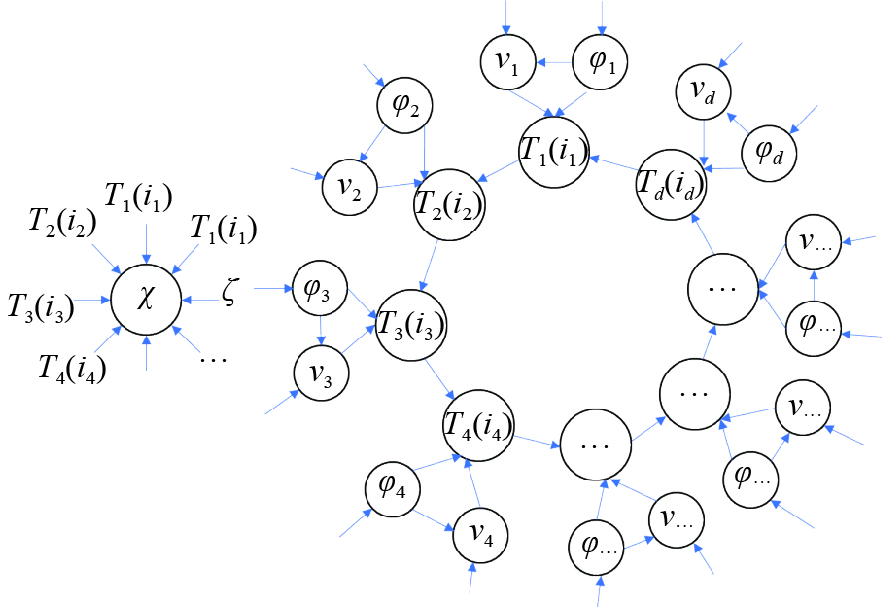
图像质量低、特征信息不明显是遥感图像获取过程中的常见问题。传统的图像增强方法常常因为不能有效地整合全局信息,从而不能高精度、高效率地凸显有用信息。本文通过结合张量分解和非下采样Contourlet变换,提出一种改进的遥感图像增强方法。使用优化的非下采样Contourlet变换对原始图像进行分解,将各尺度和方向的高频细节图像组合成高阶张量。通过贝叶斯概率张量补全,从不完全张量中识别潜在因子,以预测图像缺失的细节信息。实验结果表明:所提出方法能在有效恢复样张缺失信息的同时突出图像的特征信息,与不同图像增强方法相比,样张处理后在信噪比、结构相似度以及均方根误差方面最大提升分别为27.9%、37.6%和45.4%。改进的遥感图像增强方法在可视化比较和定量评价方面优于常用的图像增强方法。



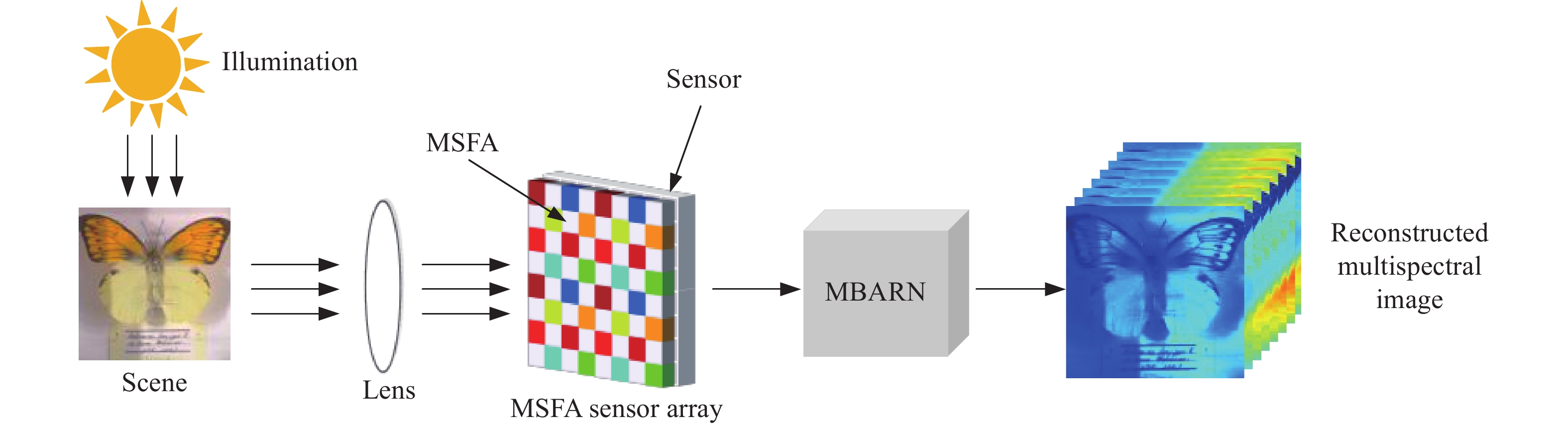
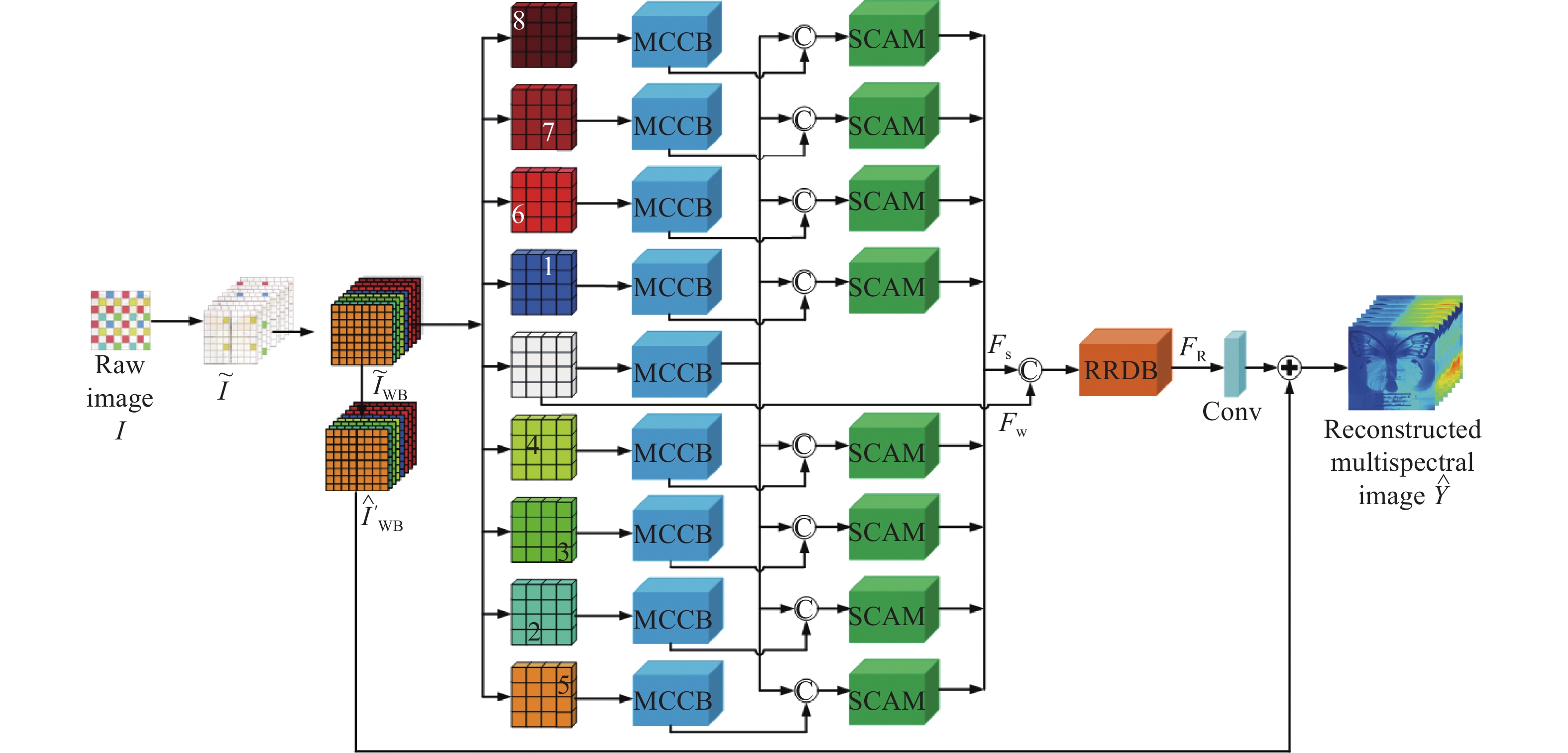
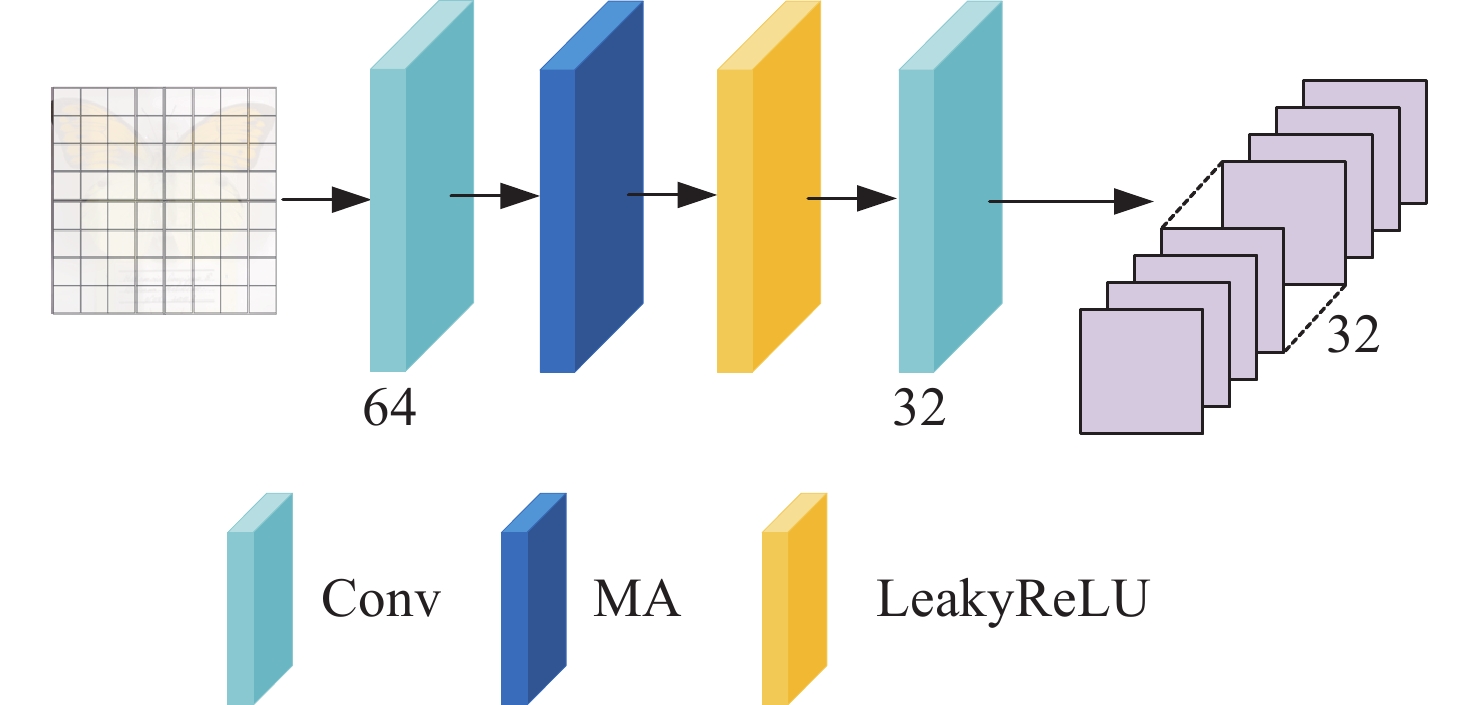
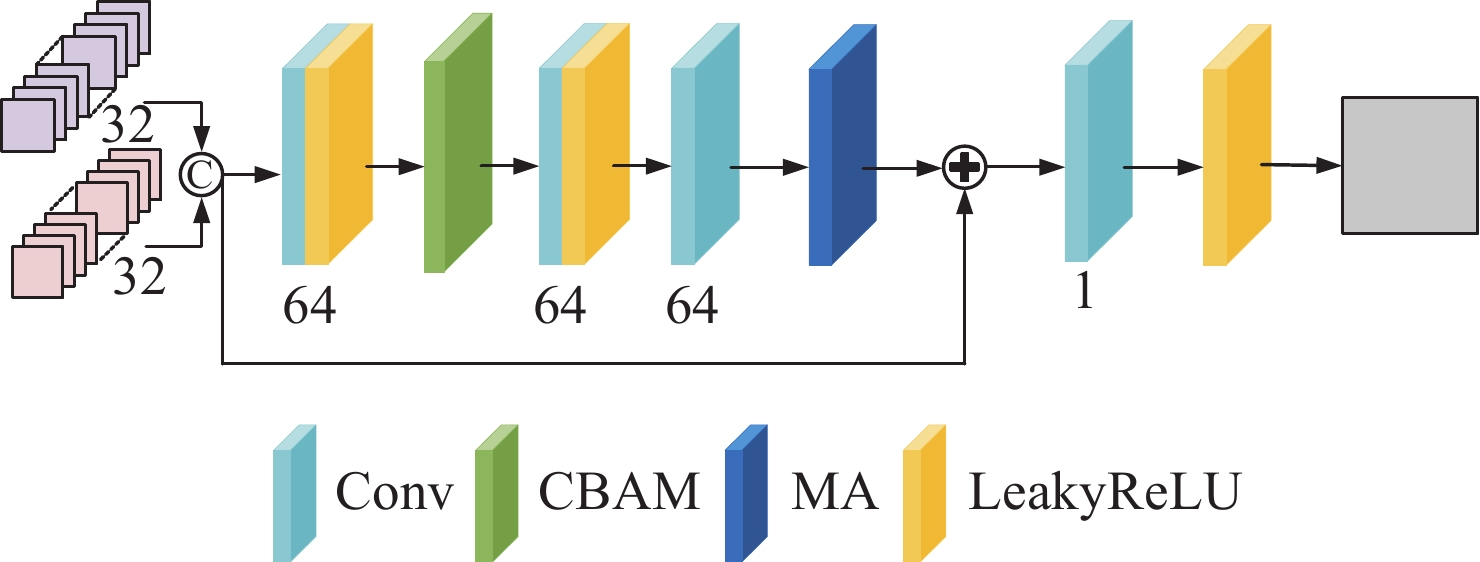
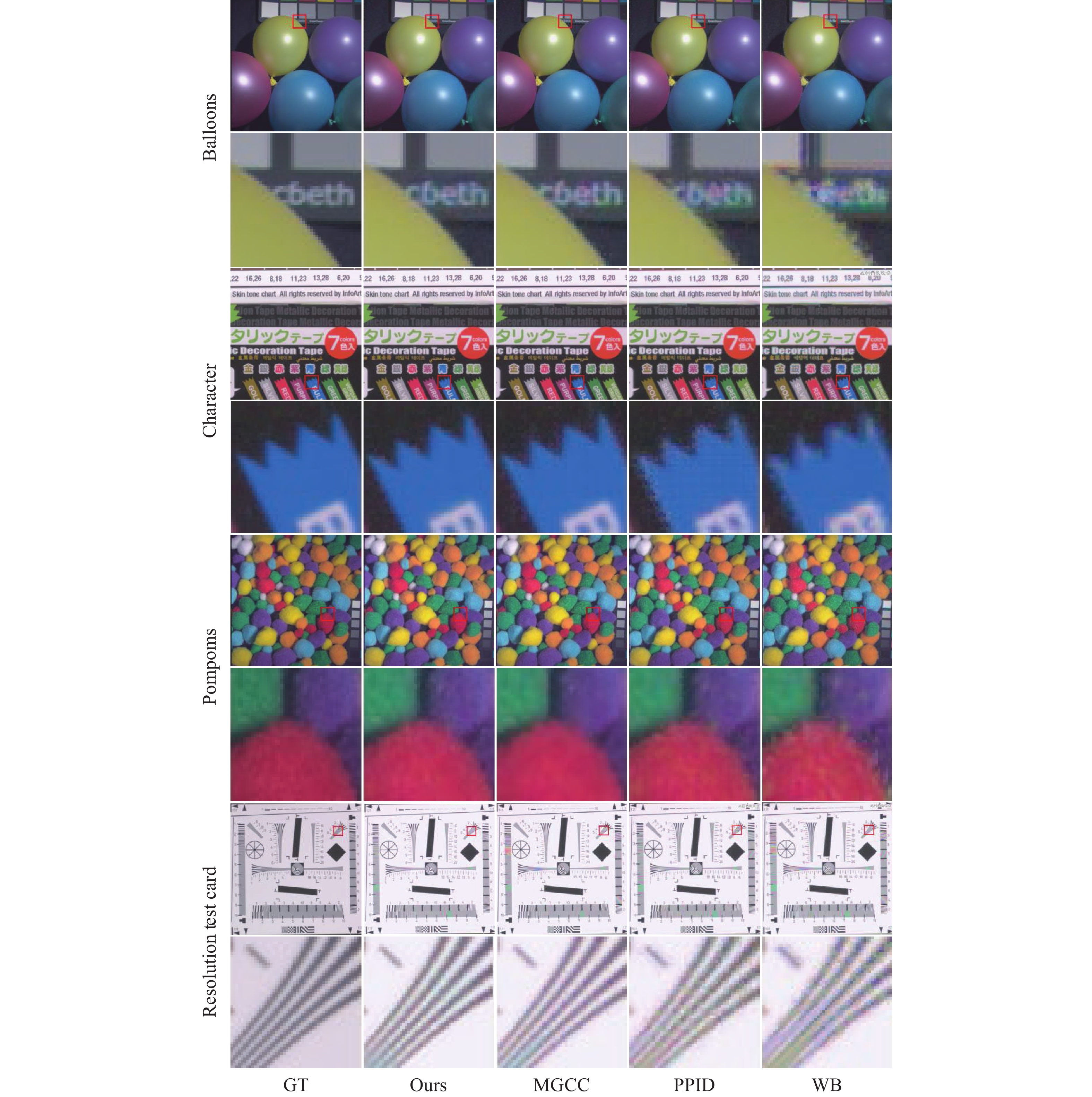
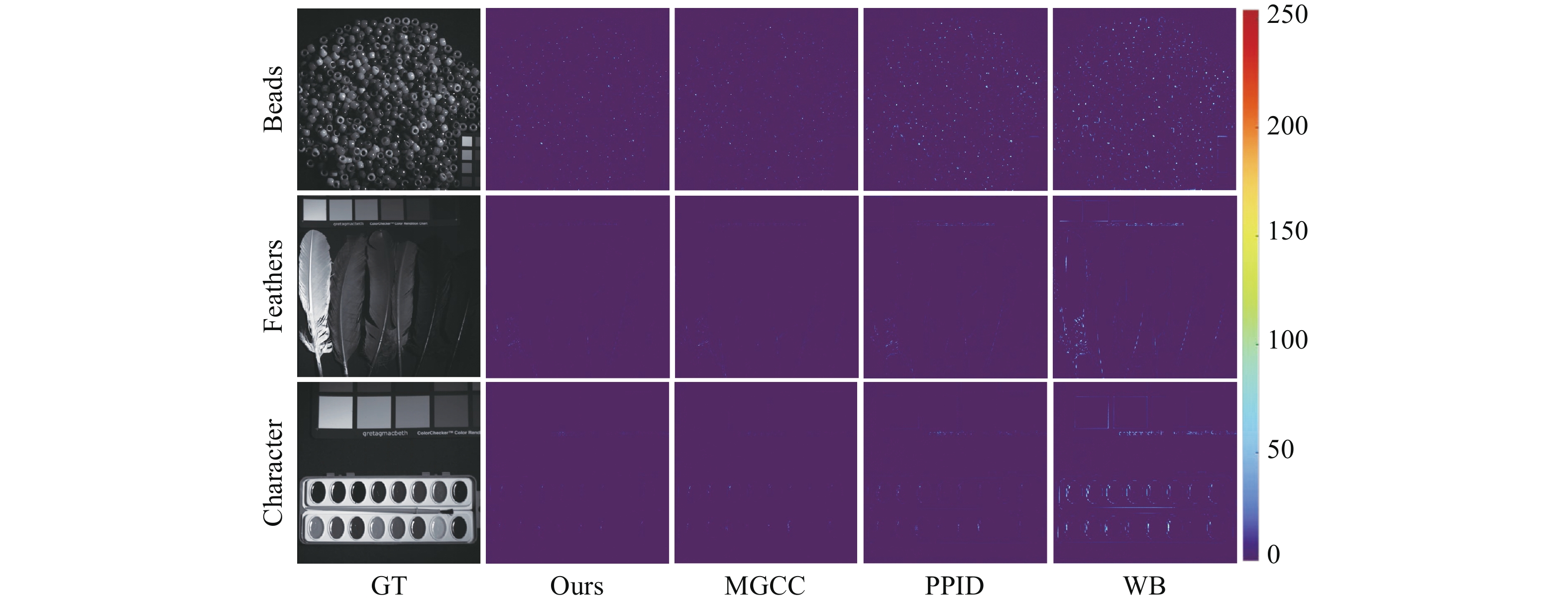
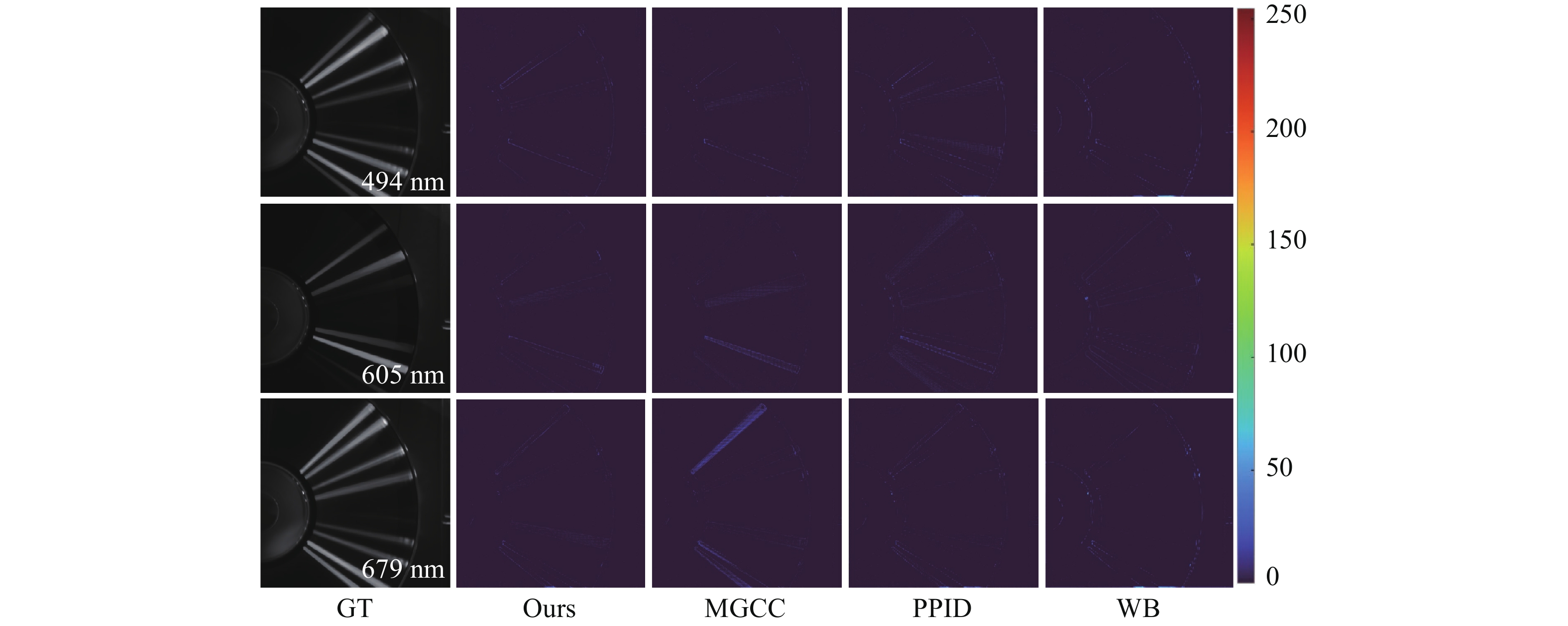
随着光谱成像技术的飞速发展,使用多光谱滤光片阵列(multispectral filter array,MSFA)采集多光谱图像的空间和光谱信息已经成为研究热点。如何利用低采样率且具有强频谱互相关性的原始数据进行重构成为制约其发展的瓶颈。本文基于一种含有全通波段的8波段4×4 MSFA,提出了一种空谱联合的多分支注意力残差网络模型。使用多分支模型对各个波段插值后的图像特征进行学习。利用本文设计的空间通道注意力模型对8个波段和全通波段的特征信息进行联合处理。该模型通过多层卷积和卷积注意力模块以及残差补偿机制,有效减小了各波段的颜色差异,增强了边缘纹理等相关特征信息。对于初步插值的全通波段和其他波段的特征信息,通过无需进行批量归一化的残差密集块对多光谱图像空间和光谱相关性进行特征学习,以匹配各个波段的光谱信息。实验结果表明,对于在D65光源下测试图像,本文所提模型的峰值信噪比、结构相似度和光谱角相似度分别较最先进的深度学习方法提升了3.46%、0.27%和6%。该方法不仅减少了伪影还获得了更多的纹理细节。
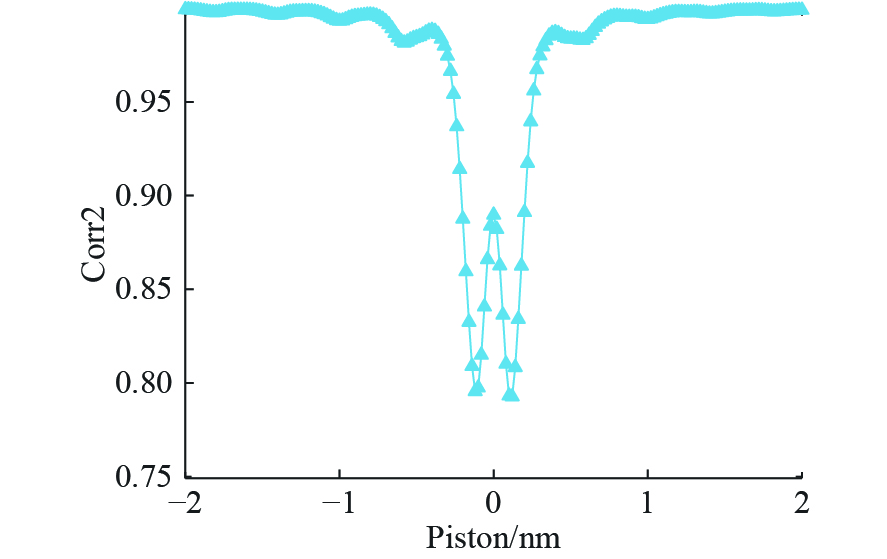
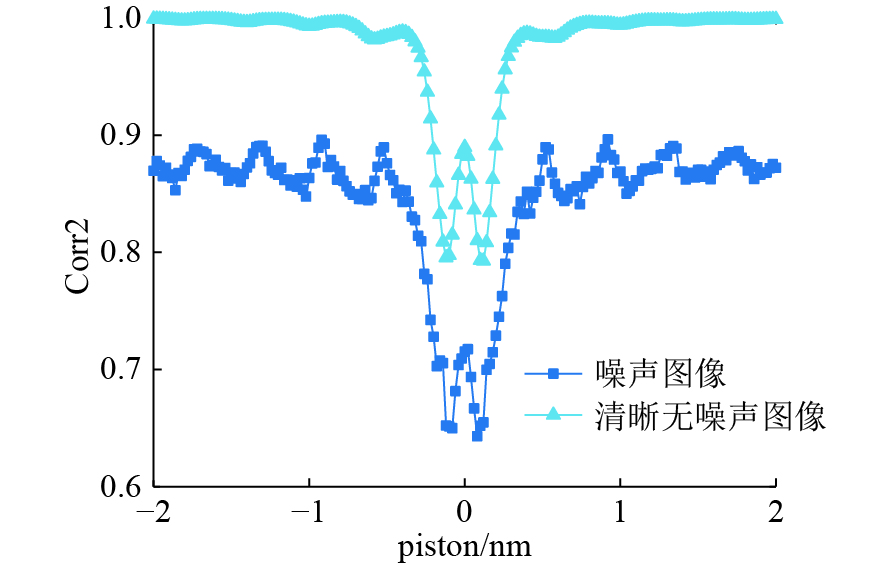
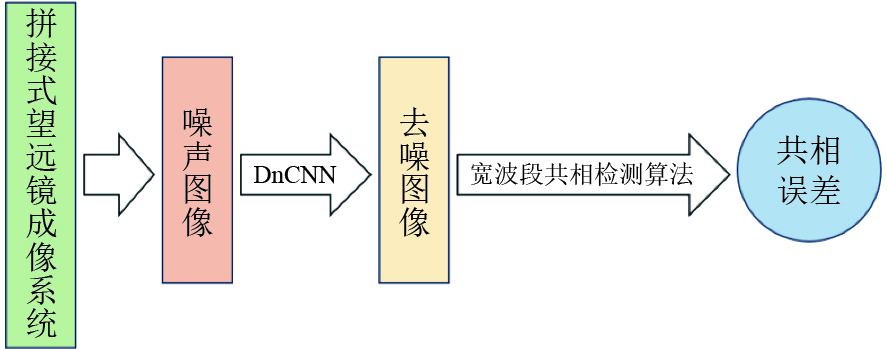
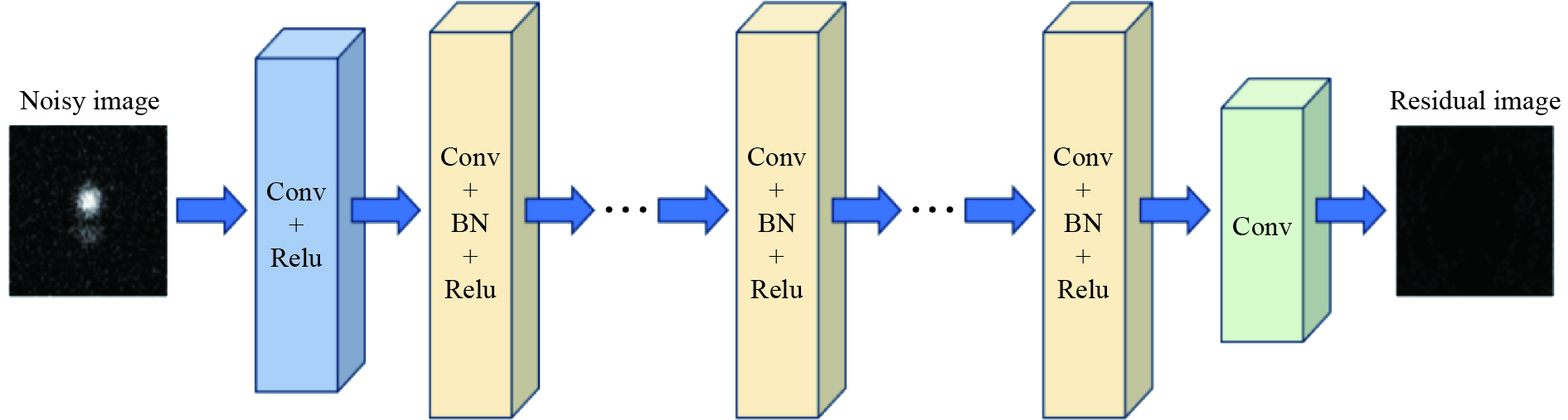
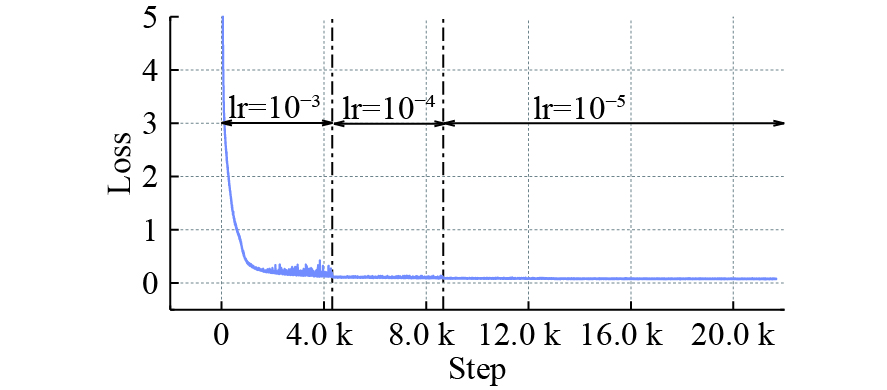
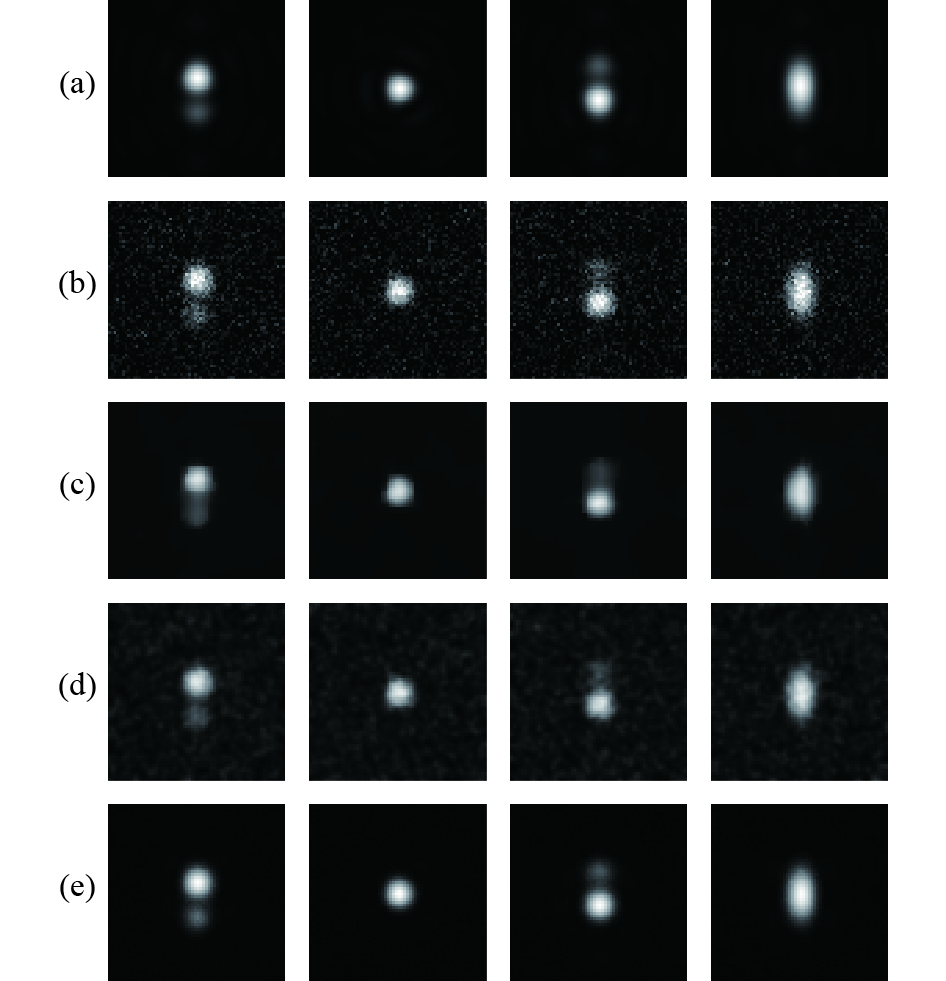
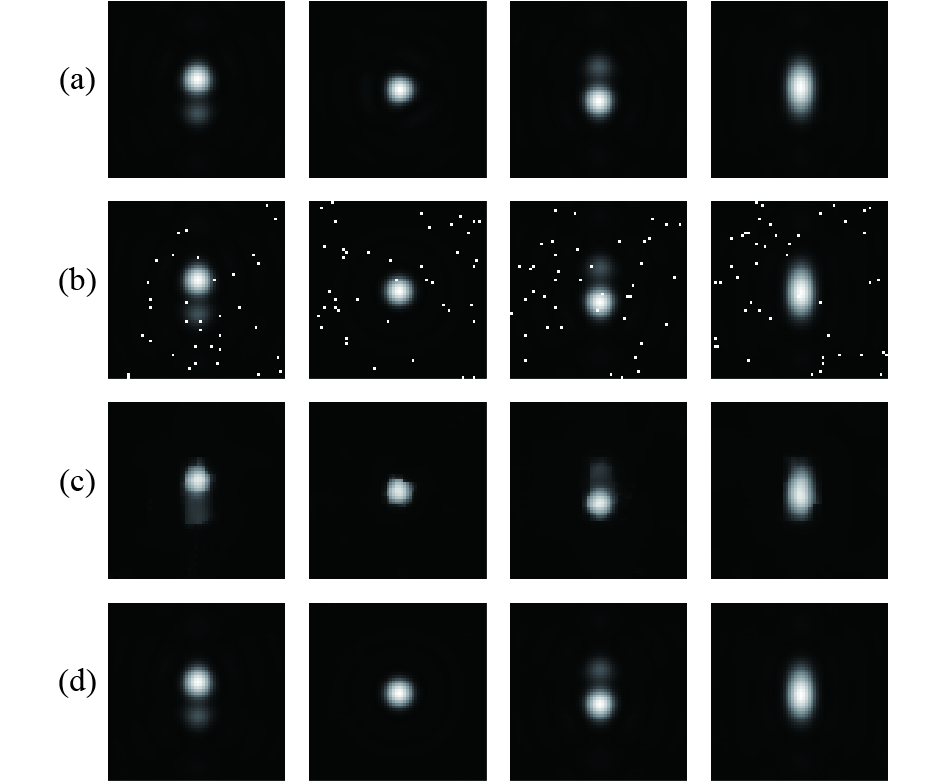
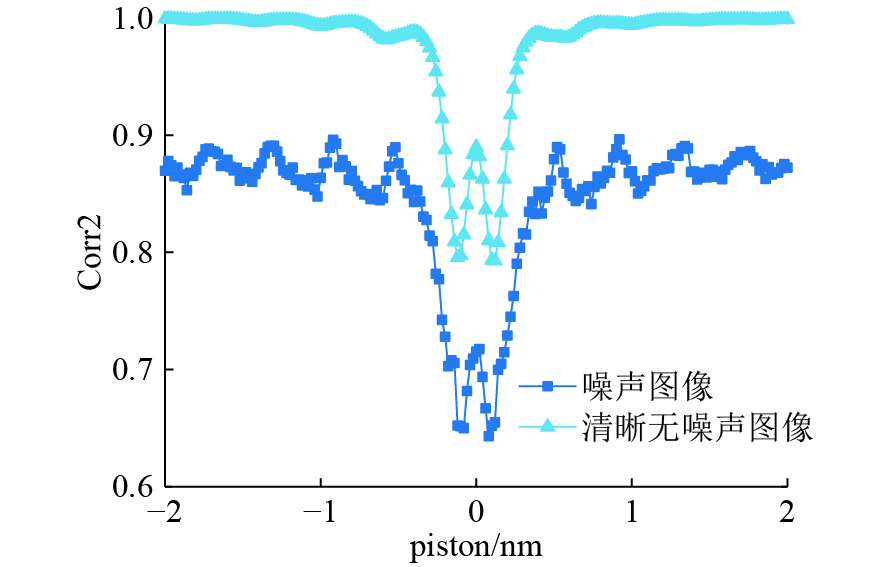
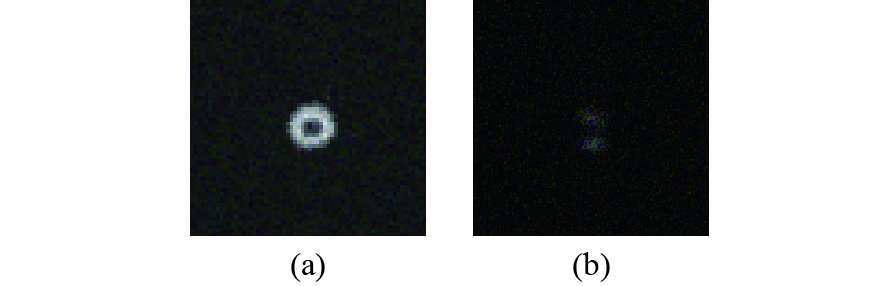
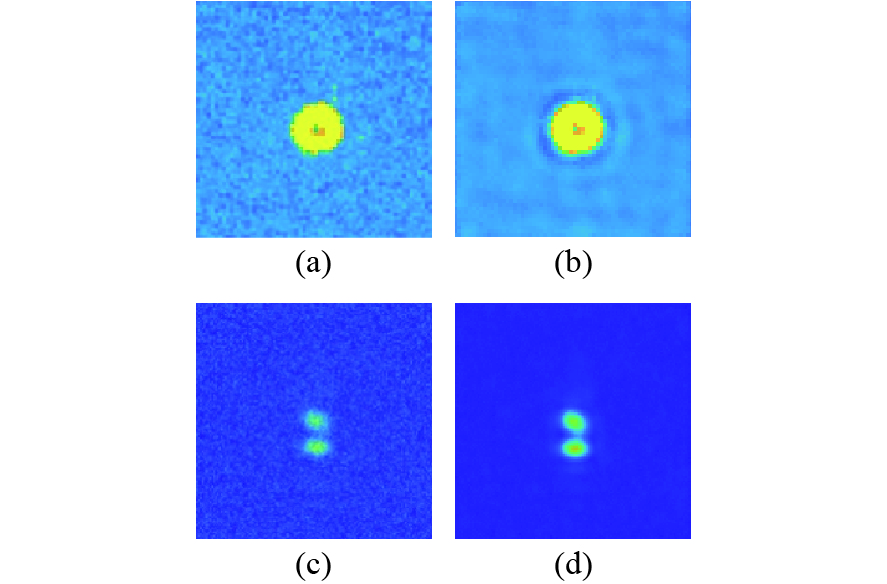
拼接镜的共相误差检测是当前科学研究的热点问题之一,基于宽波段光源的共相检测技术解决了夏克哈特曼法由于目标流量低引起的测量时间长的问题,从而提升了piston误差的检测精度和量程。然而,当前宽波段算法在实际应用中,由于复杂的环境以及相机扰动等干扰因素的存在导致获取的圆形孔径衍射图像含有一定量的噪声,从而导致相关系数值低于设定阈值,最终使该方法精度降低,甚至失效。针对这一问题,本文提出将基于深度降噪卷积神经网络(DnCNN)的算法集成到宽波段算法中,以实现对噪声干扰的控制,并保留远场图像的相位信息。首先,将使用MATLAB获得的圆孔衍射图像作为DnCNN的训练数据,然后,将不同噪声水平的图像导入到训练好的降噪模型中,即可得到降噪后的图像以及降噪前、后圆孔衍射图像的峰值信噪比和二者与清晰无噪声图像间的结构相似度。结果表明:降噪处理后的图像与理想清晰图像之间的平均结构相似度较处理之前有了明显提升,获得了理想的降噪效果,有效增强了宽波段算法在高噪声条件下的应对能力。该研究对于探索用于实际共相检测环境宽波段光源算法具有较强的理论意义和应用价值。

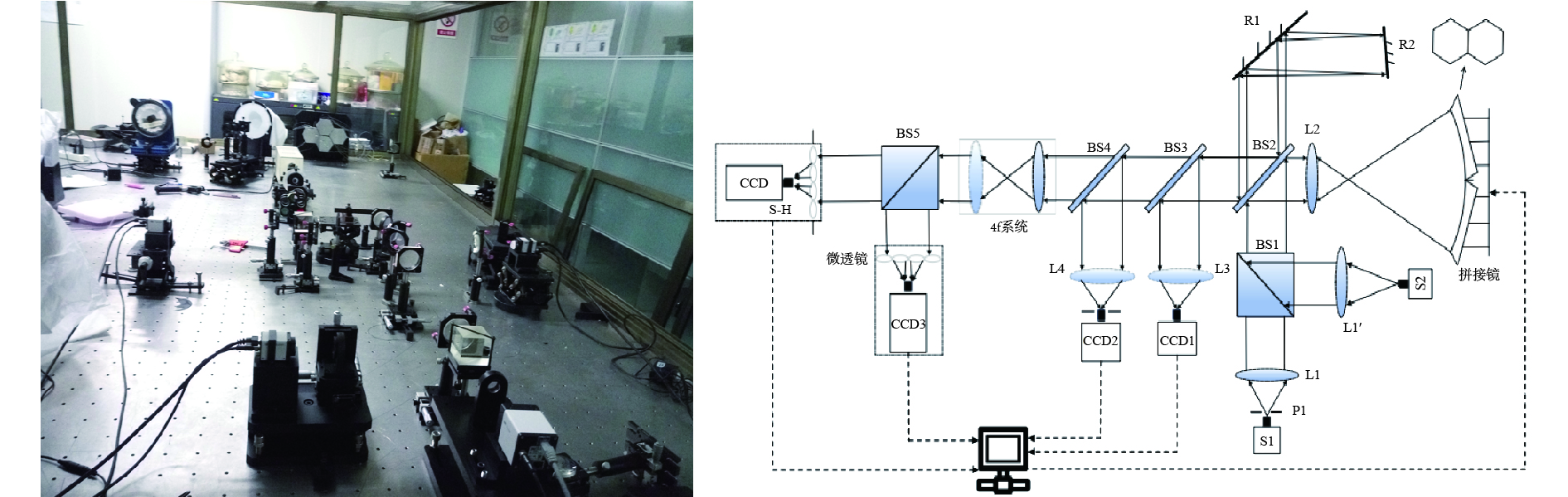
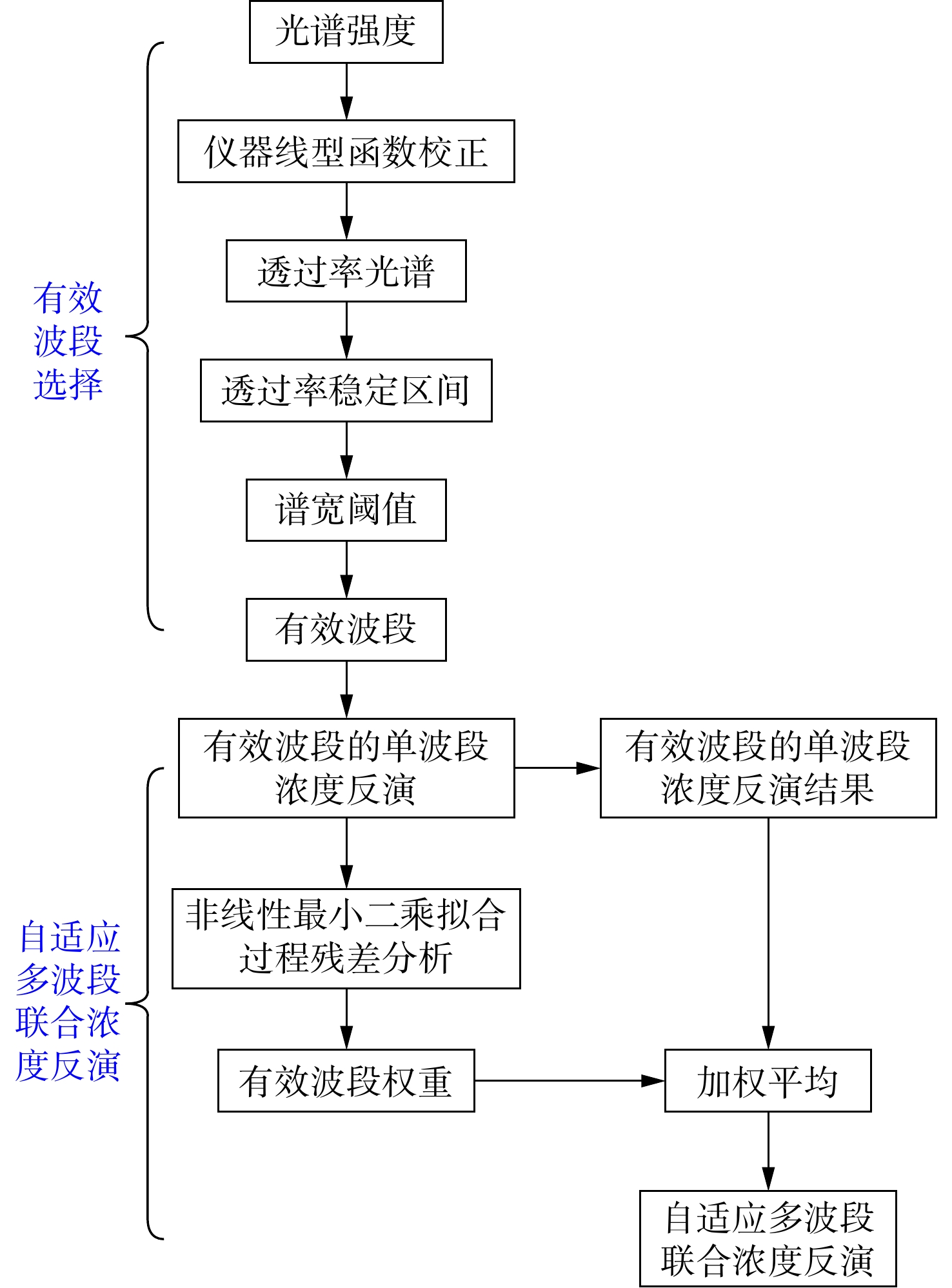
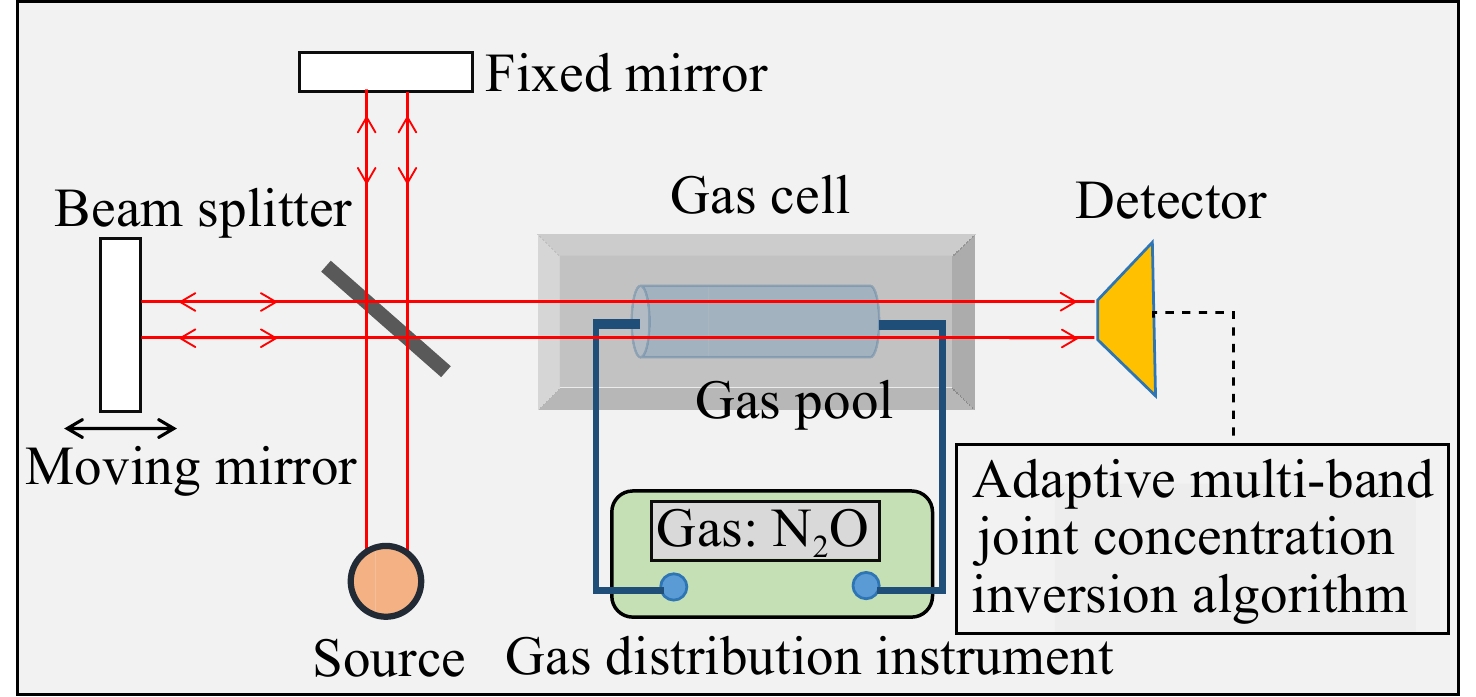
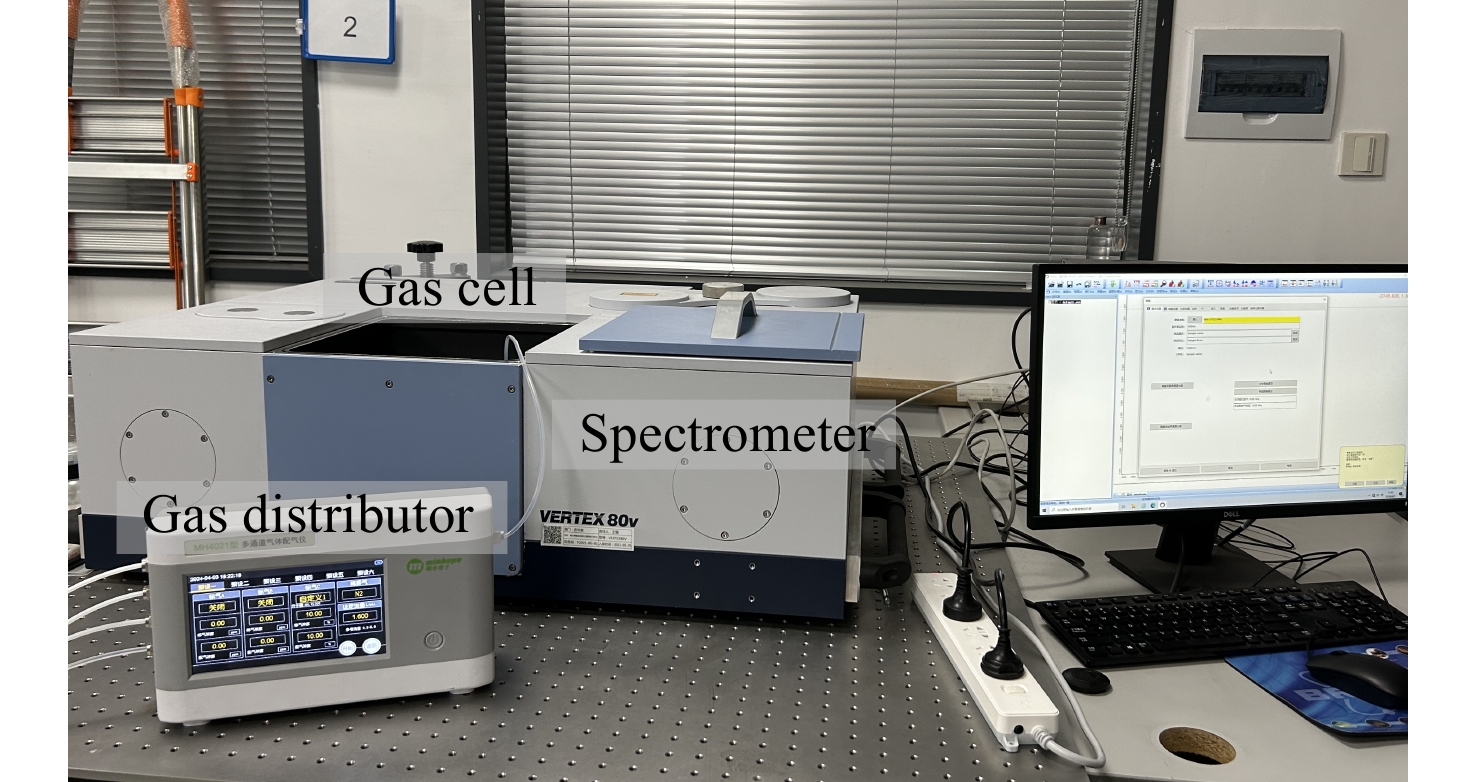
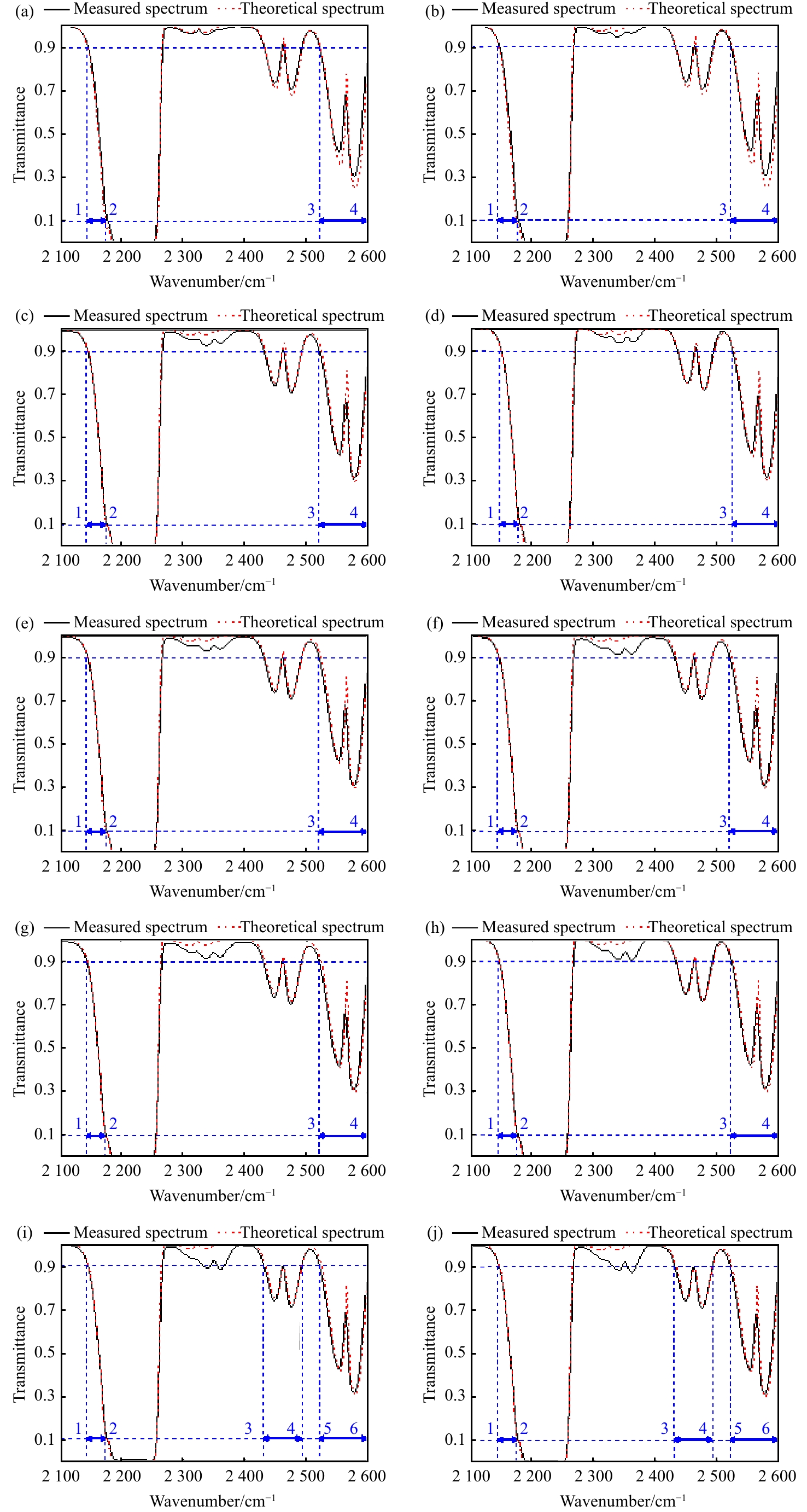
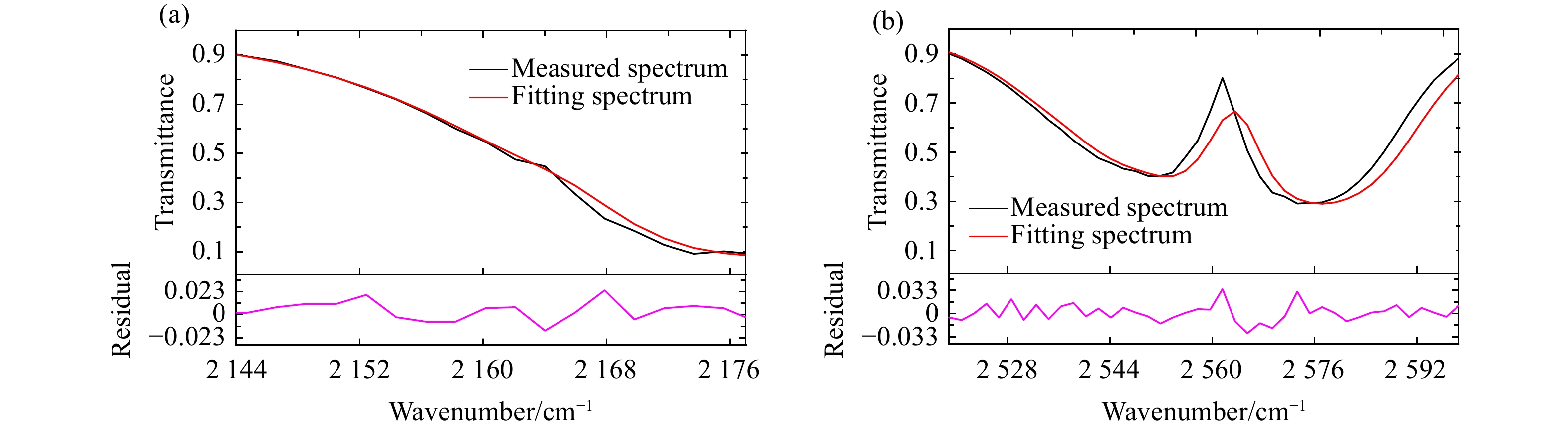
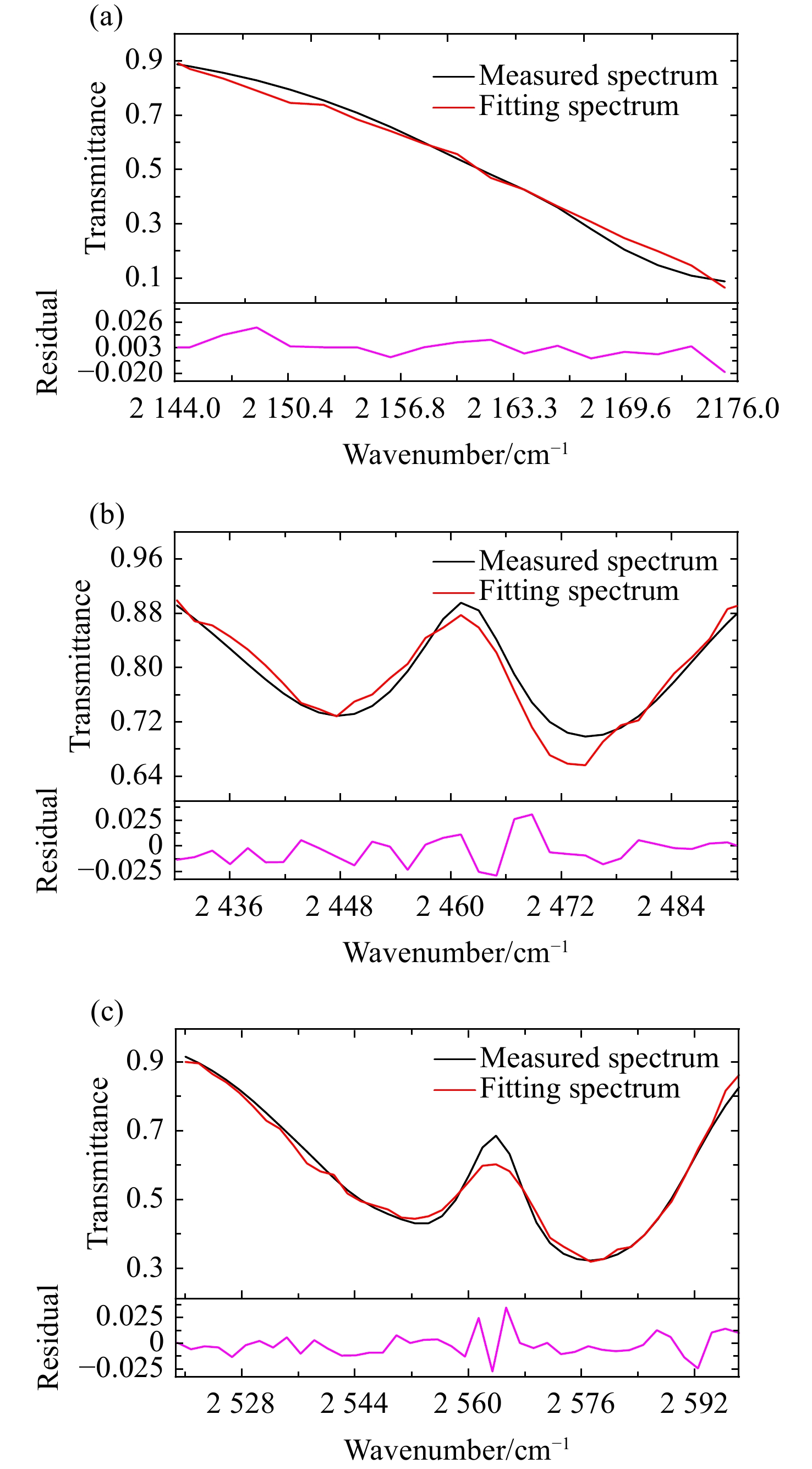
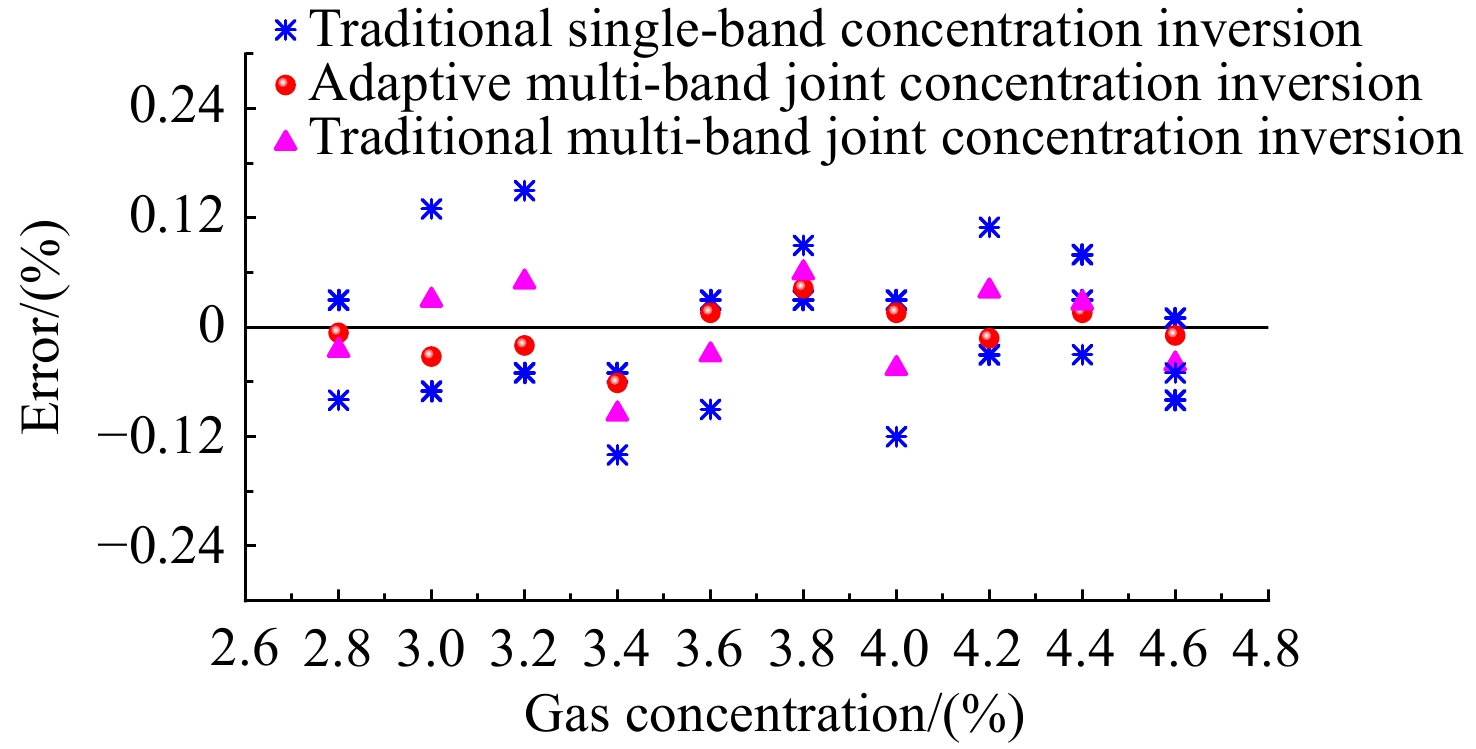
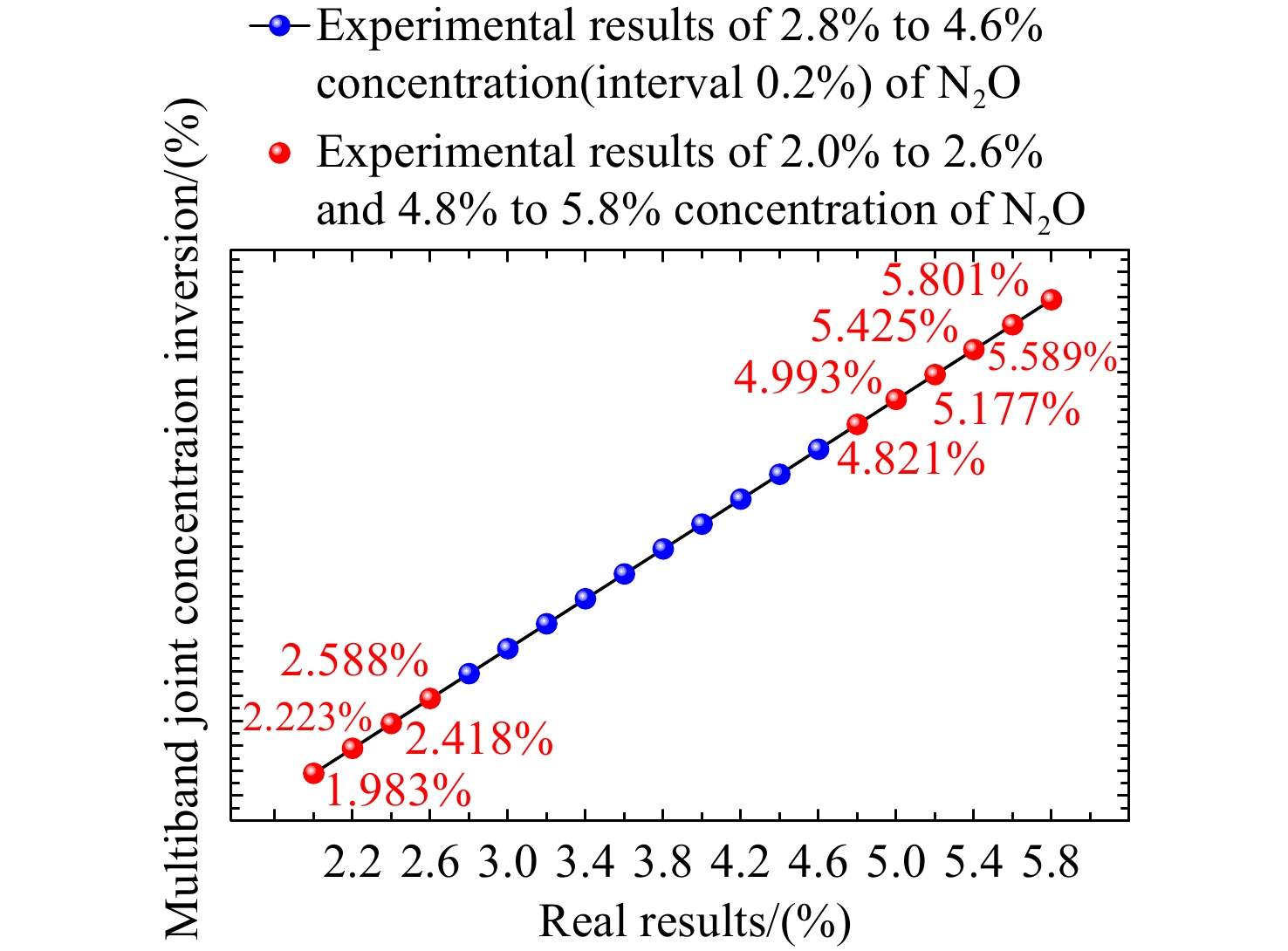
本文提出一种自适应多波段联合浓度反演算法,结合透过率稳定区间与谱宽阈值自适应选择待测气体的有效波段;采用非线性最小二乘拟合方法对各有效波段进行浓度反演及残差分析,获得各有效波段的浓度反演结果及其权重,通过加权平均实现待测气体浓度的精确定量分析。设计并进行实验验证,结果表明,自适应多波段联合浓度反演算法的稳定系数达到了
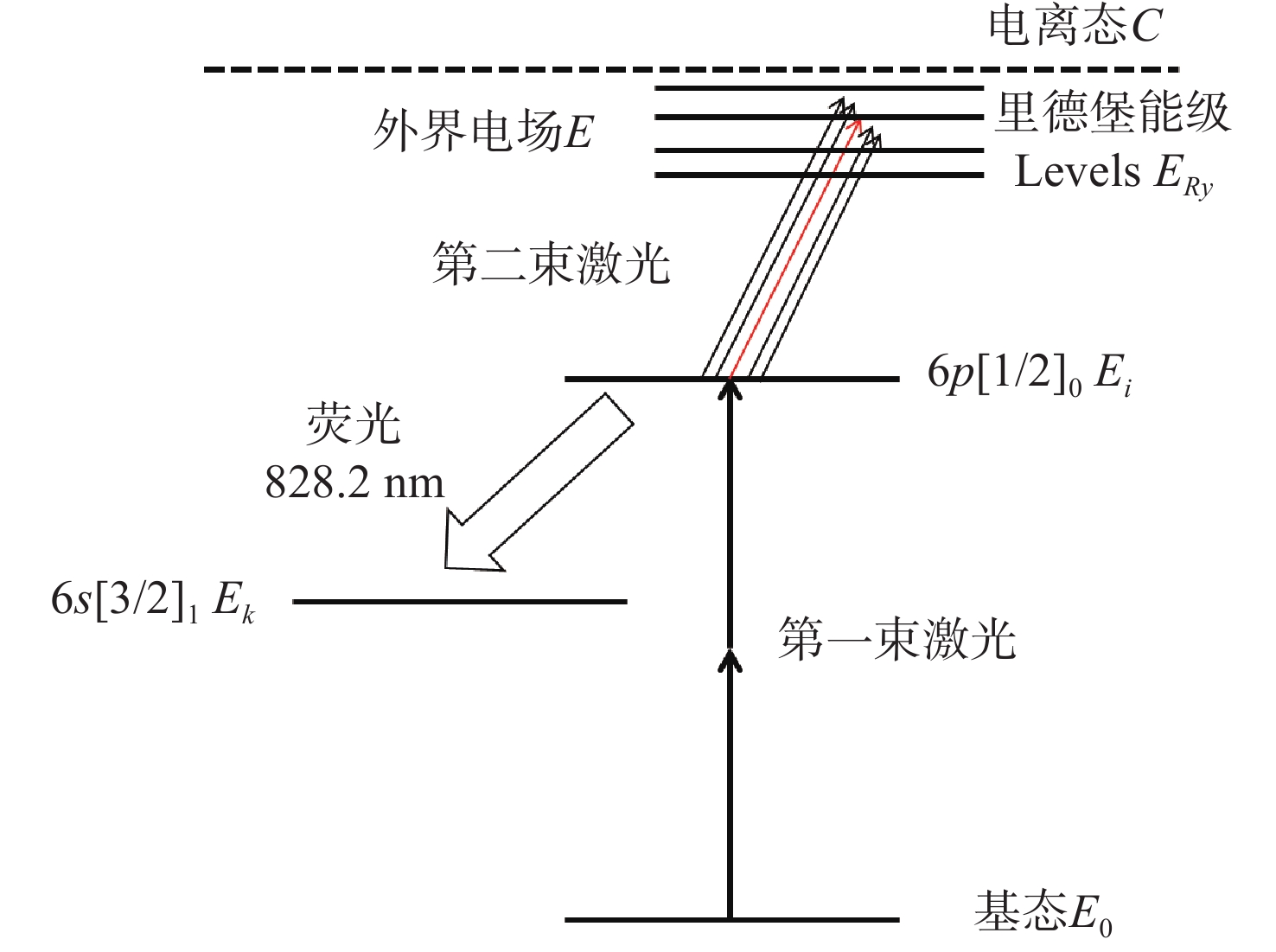
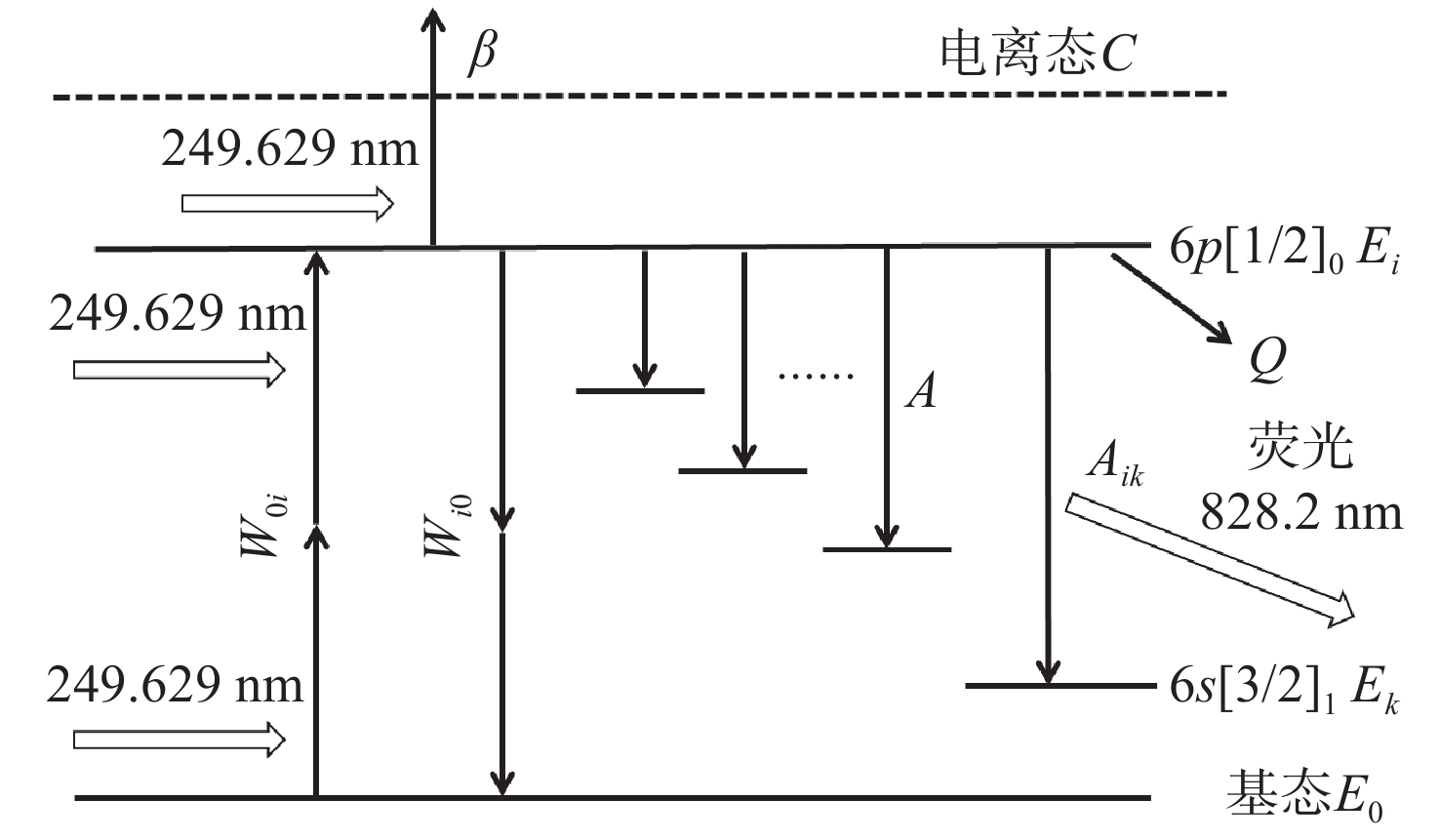
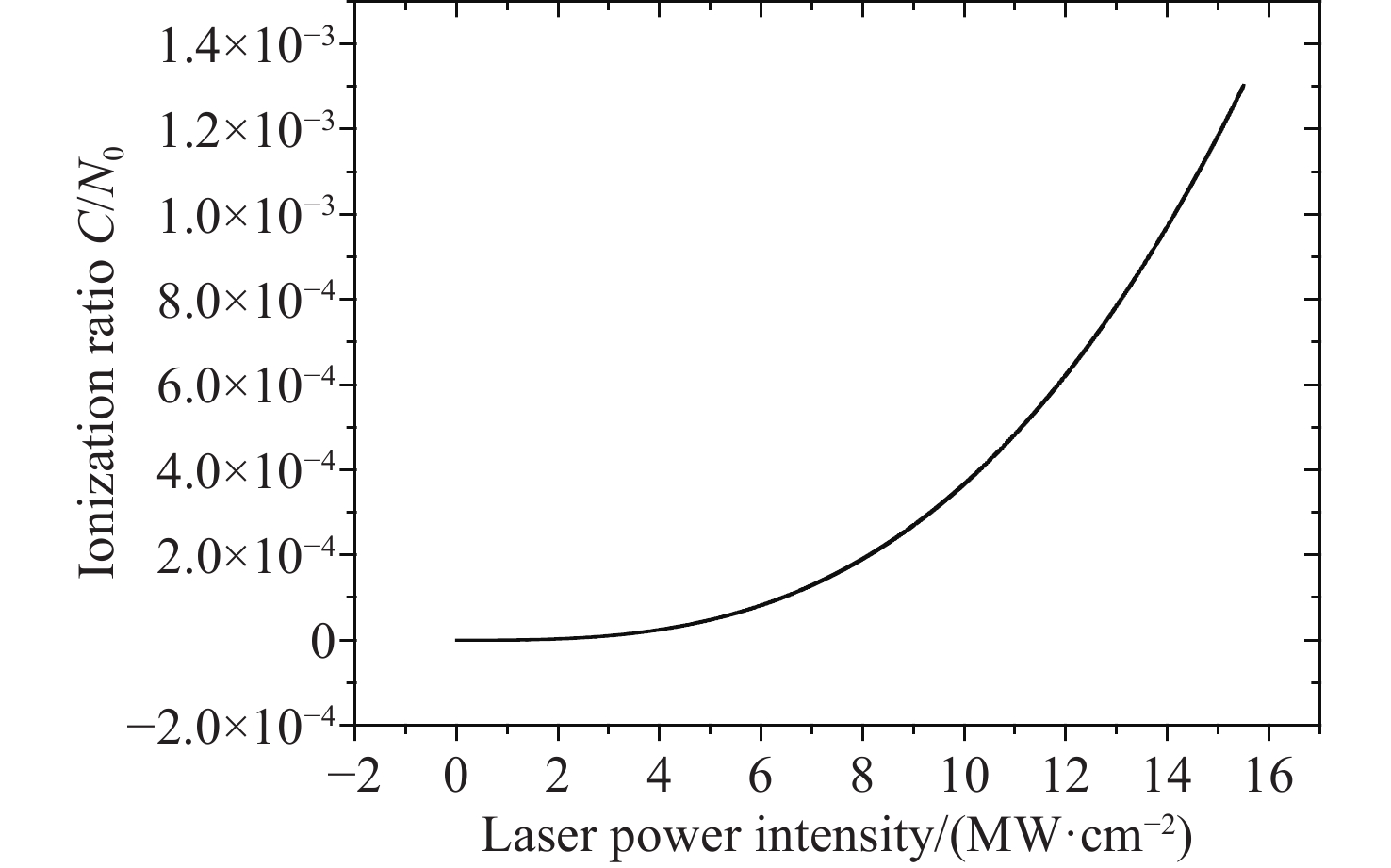
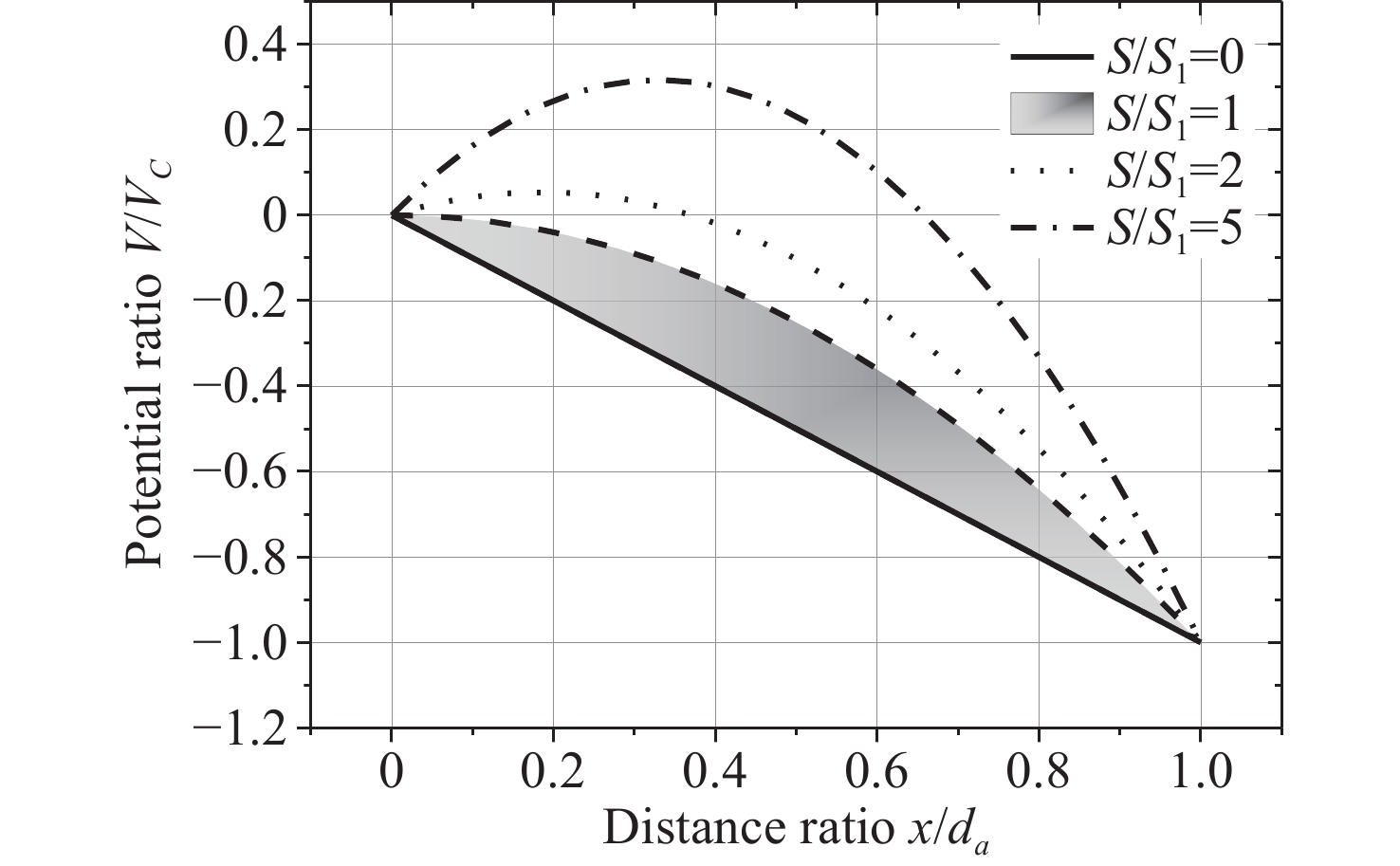
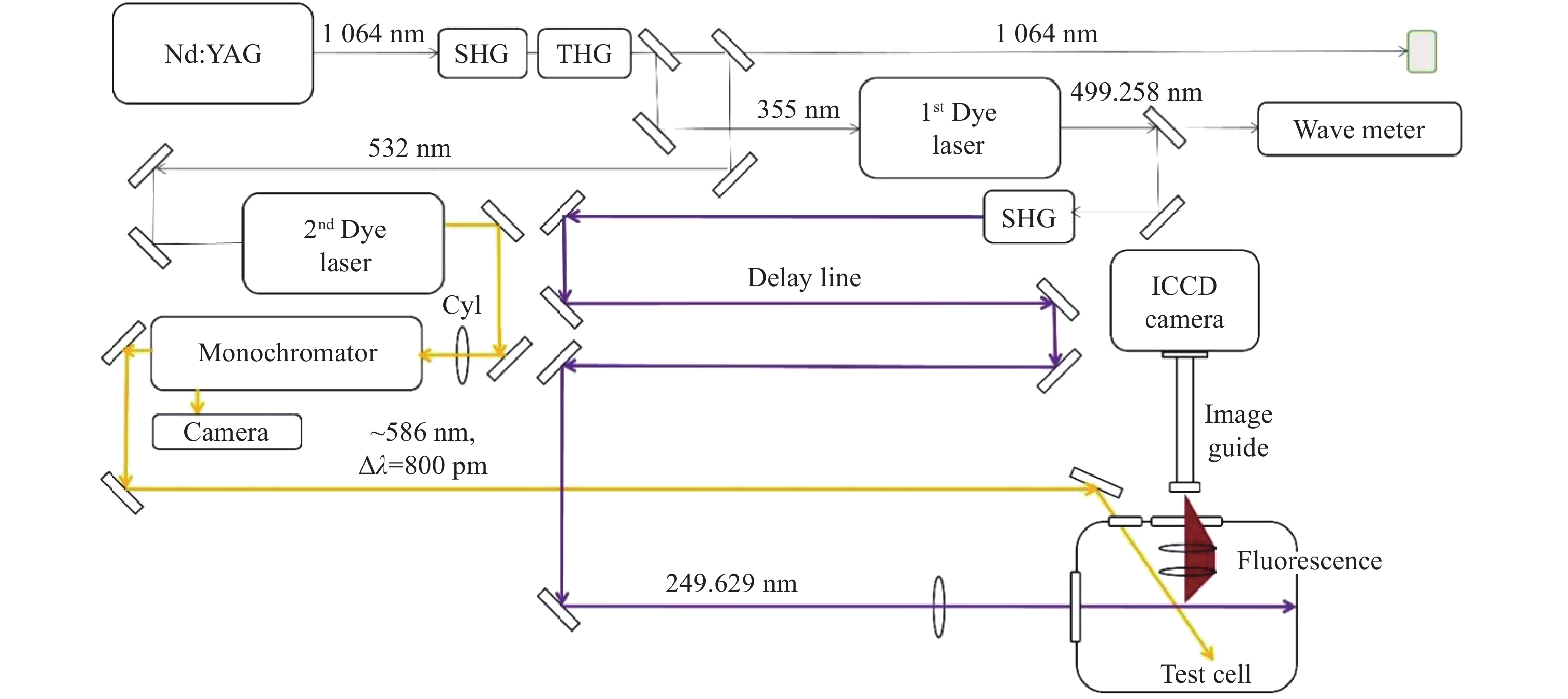
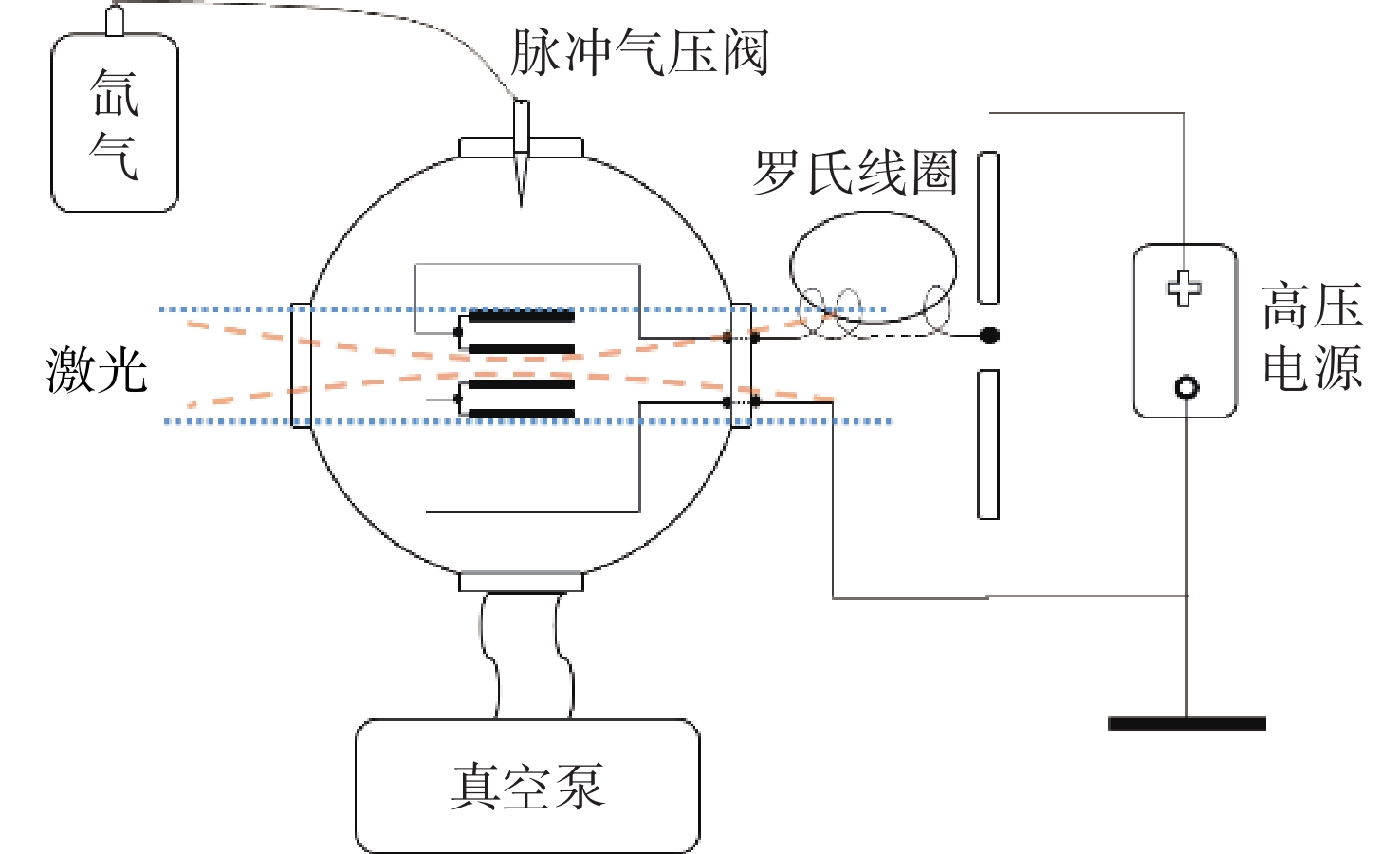
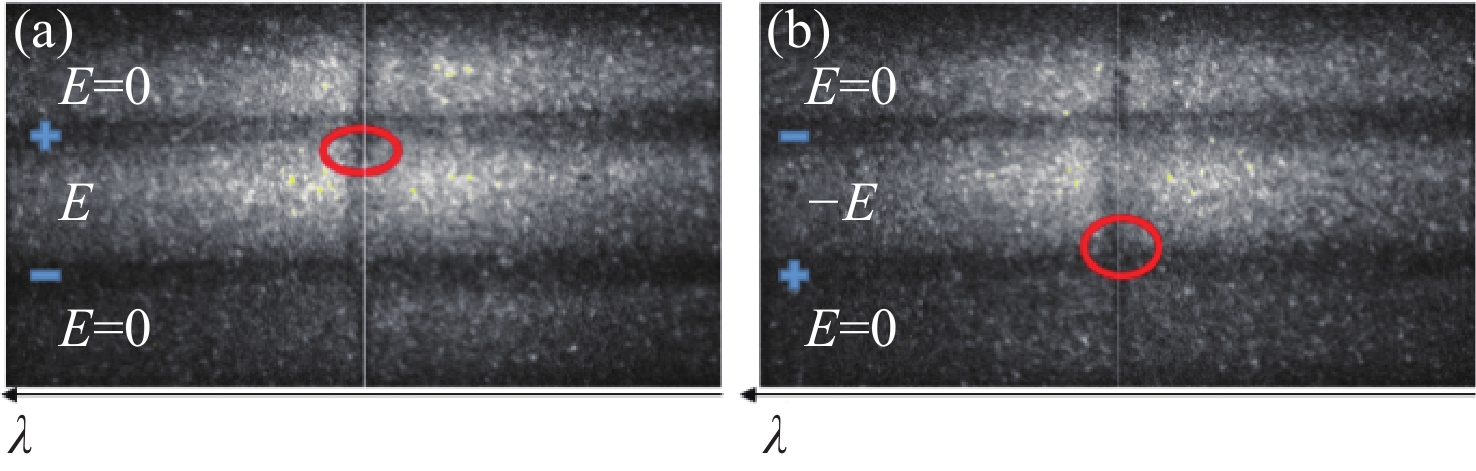
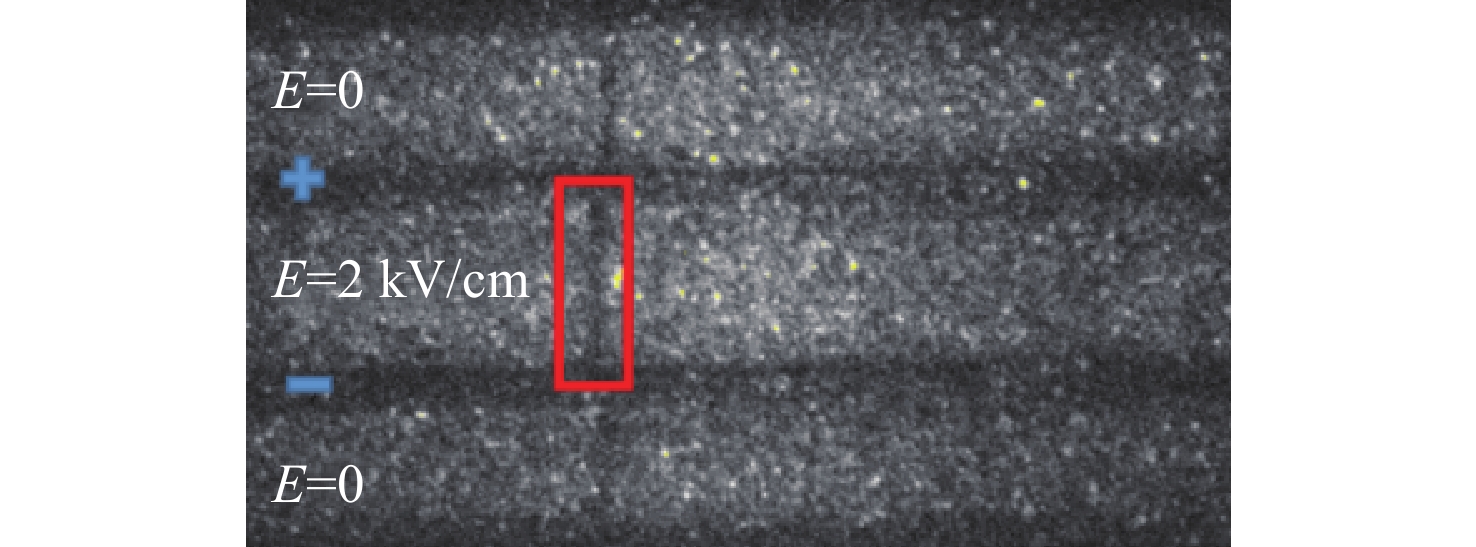
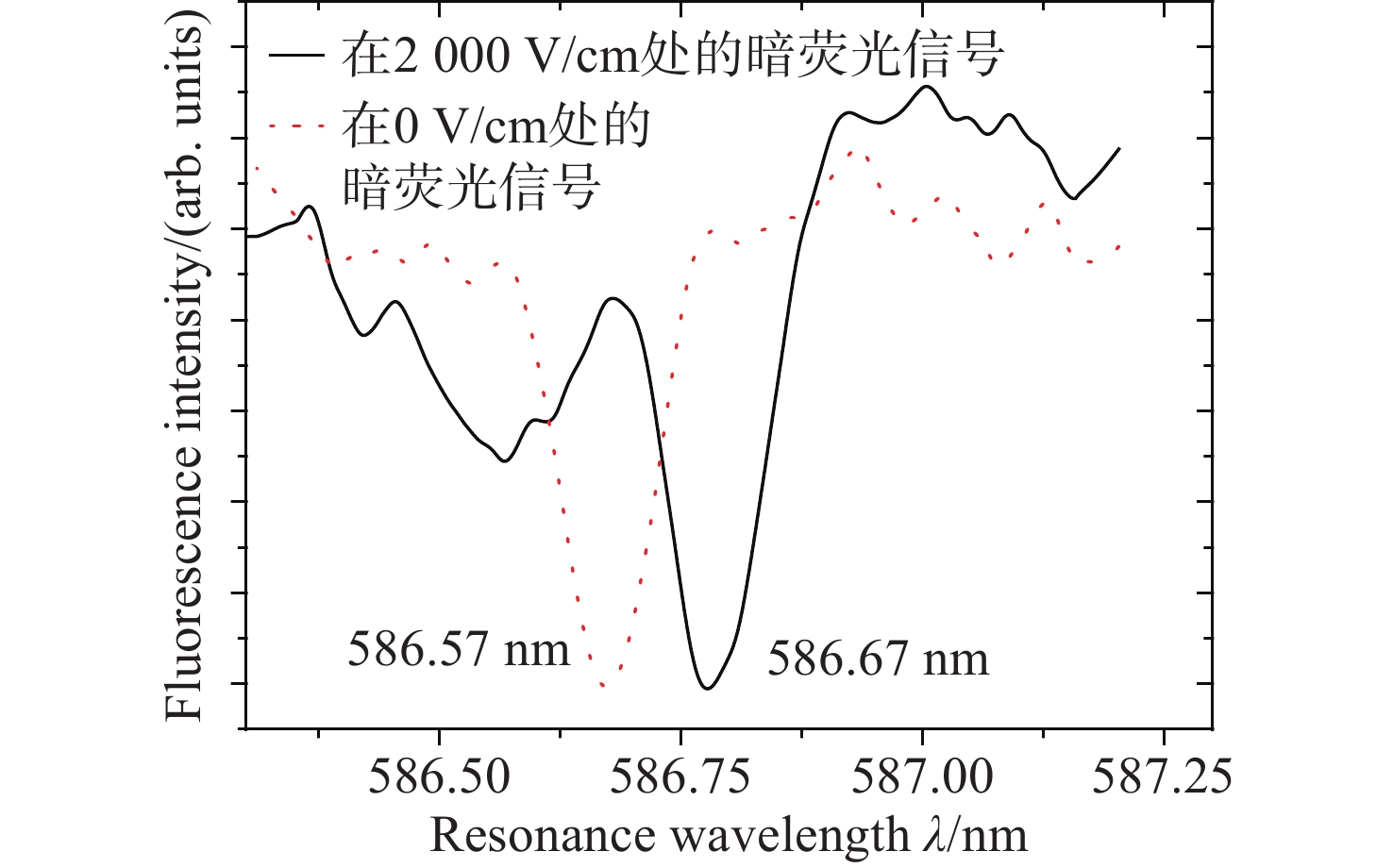
为了实现强流脉冲电子束对材料表面改性的工业化应用,需要对电子束的作用过程进行实时微扰监测。电场强度是反映电子束特性的关键参数之一,基于Stark效应的激光暗荧光光谱可实现对环境电场的微扰测量。因此,开展激光功率密度对环境电场的影响研究,对此类电场测量方法的参数设置和结果判断具有重要的理论和应用价值。通过理论分析和计算得出电场测量微扰状态下的激光功率密度与试验环境的关系模型。基于上述关系模型,搭建测试平台,验证激光功率密度对电场测量微扰的情况。实验结果表明:在示踪气体氙气压强为

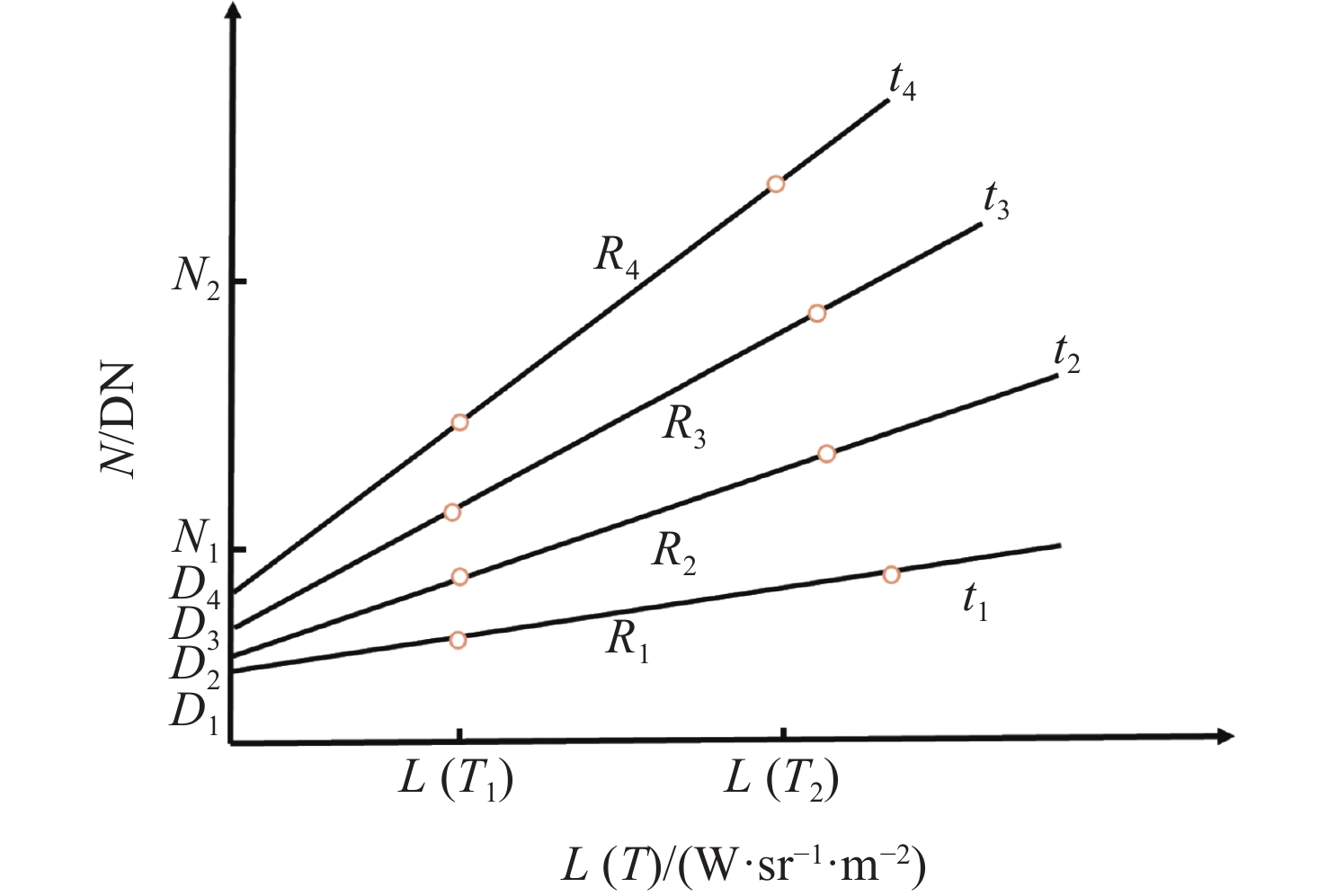
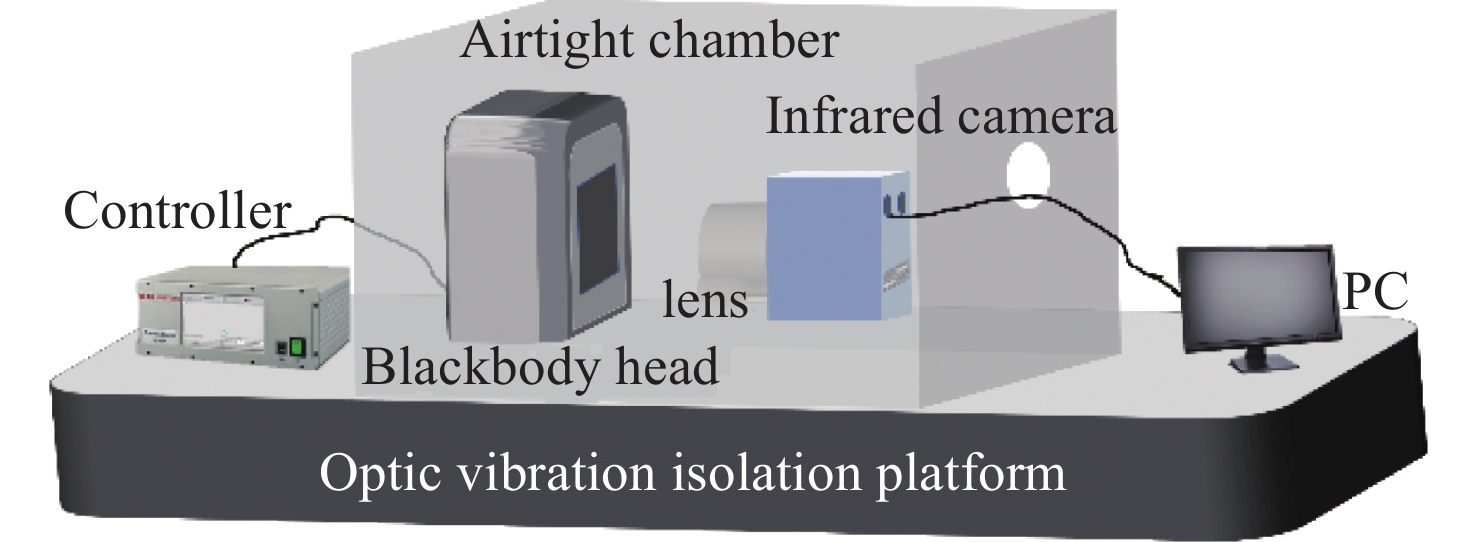
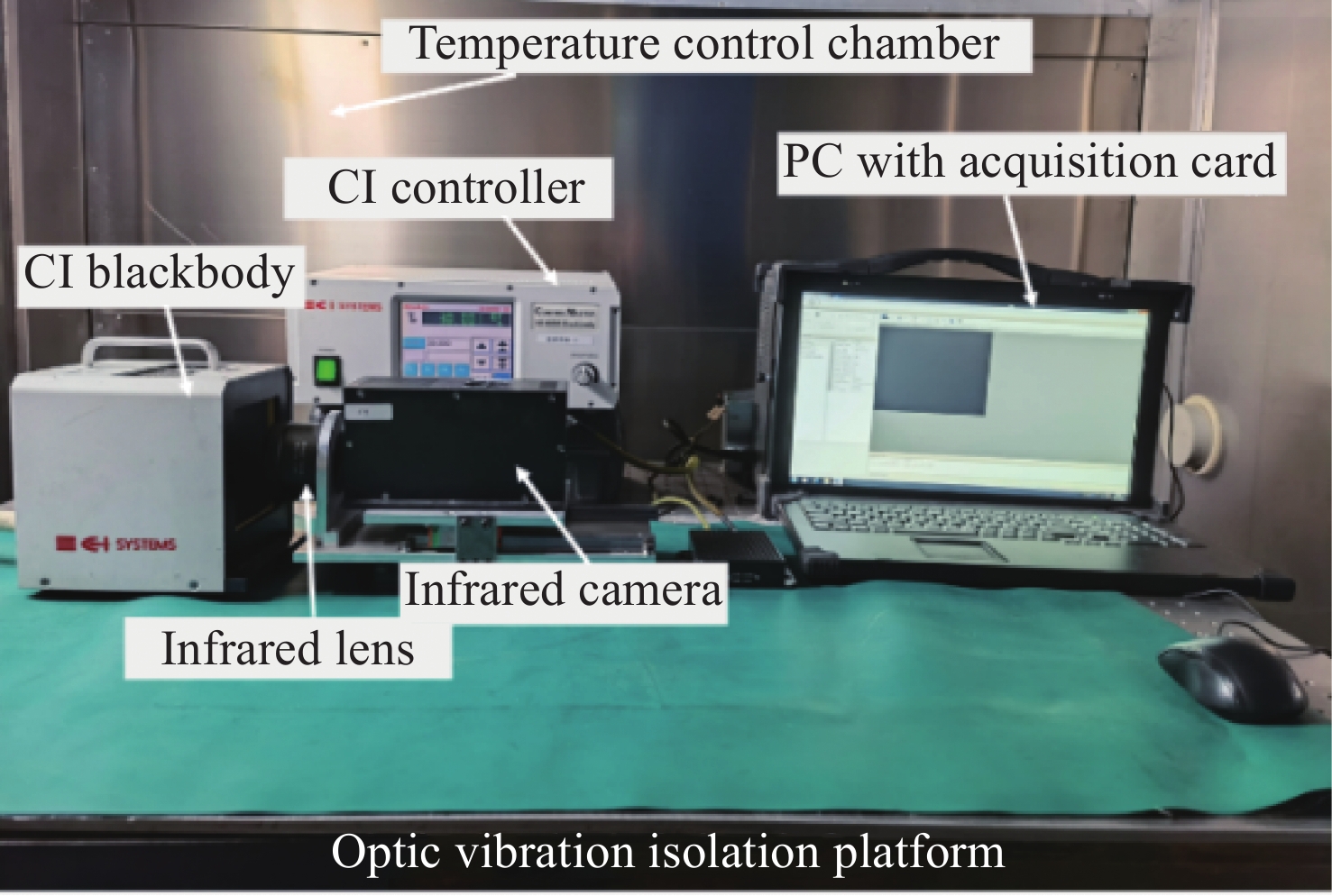
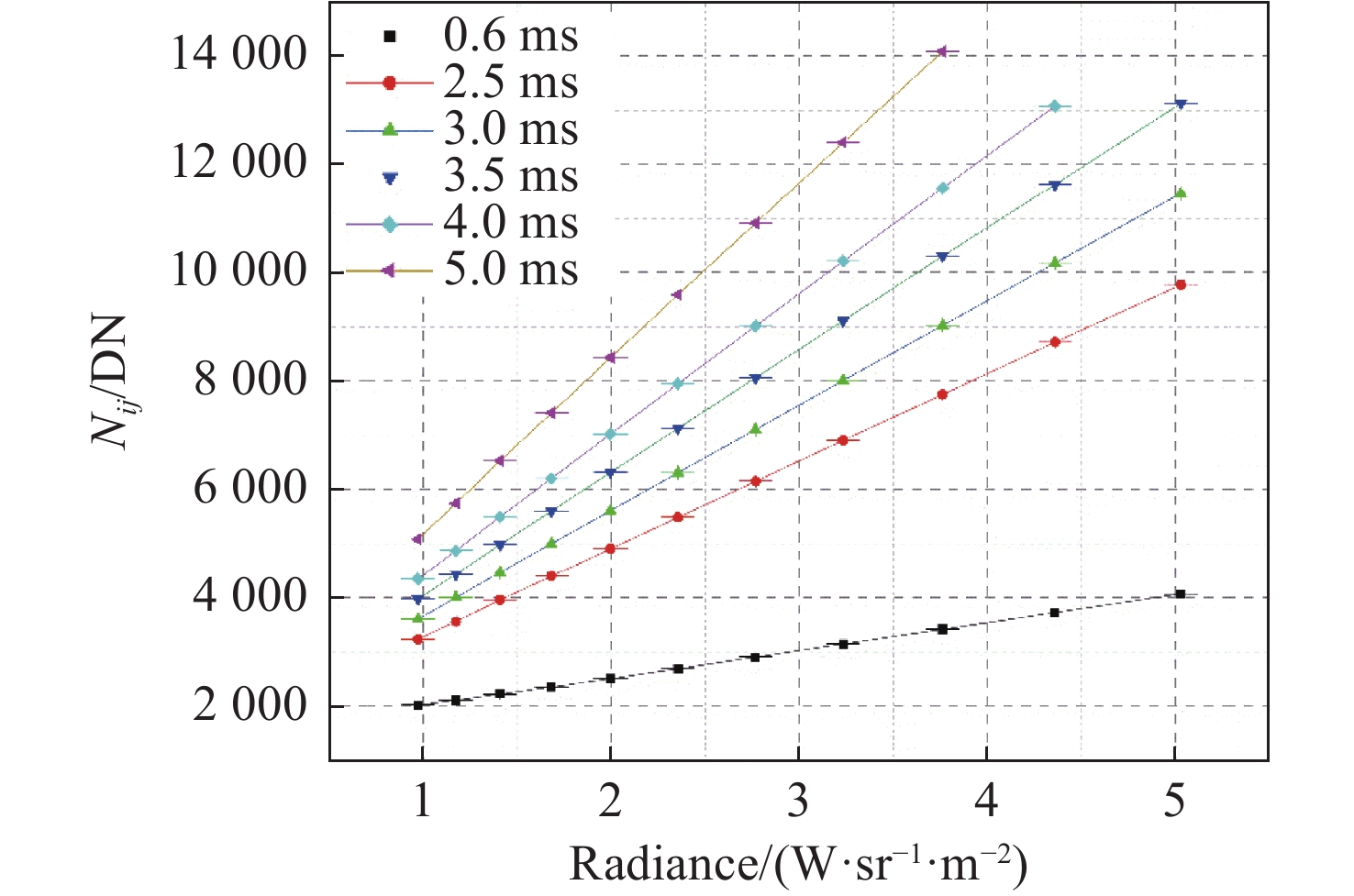
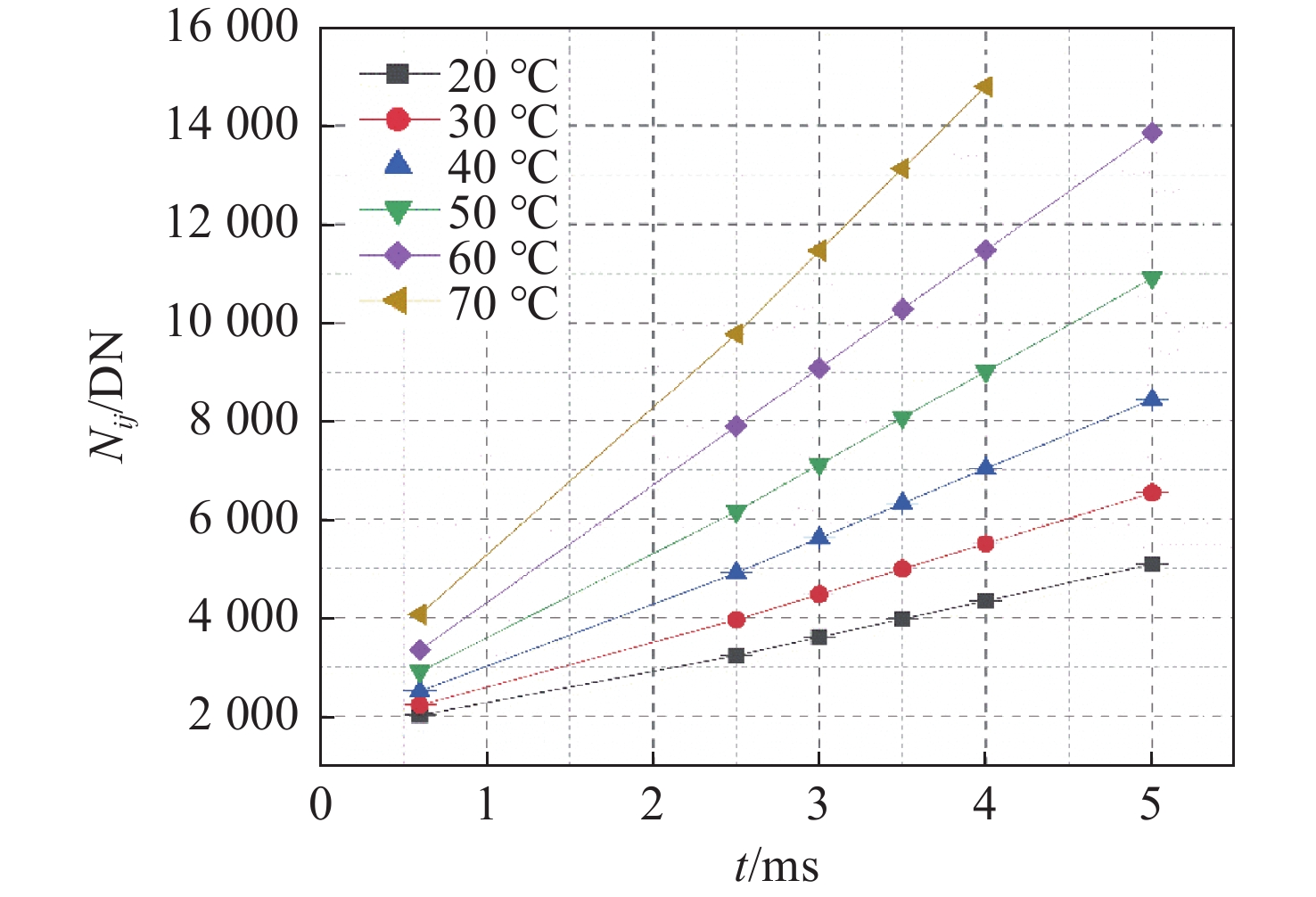
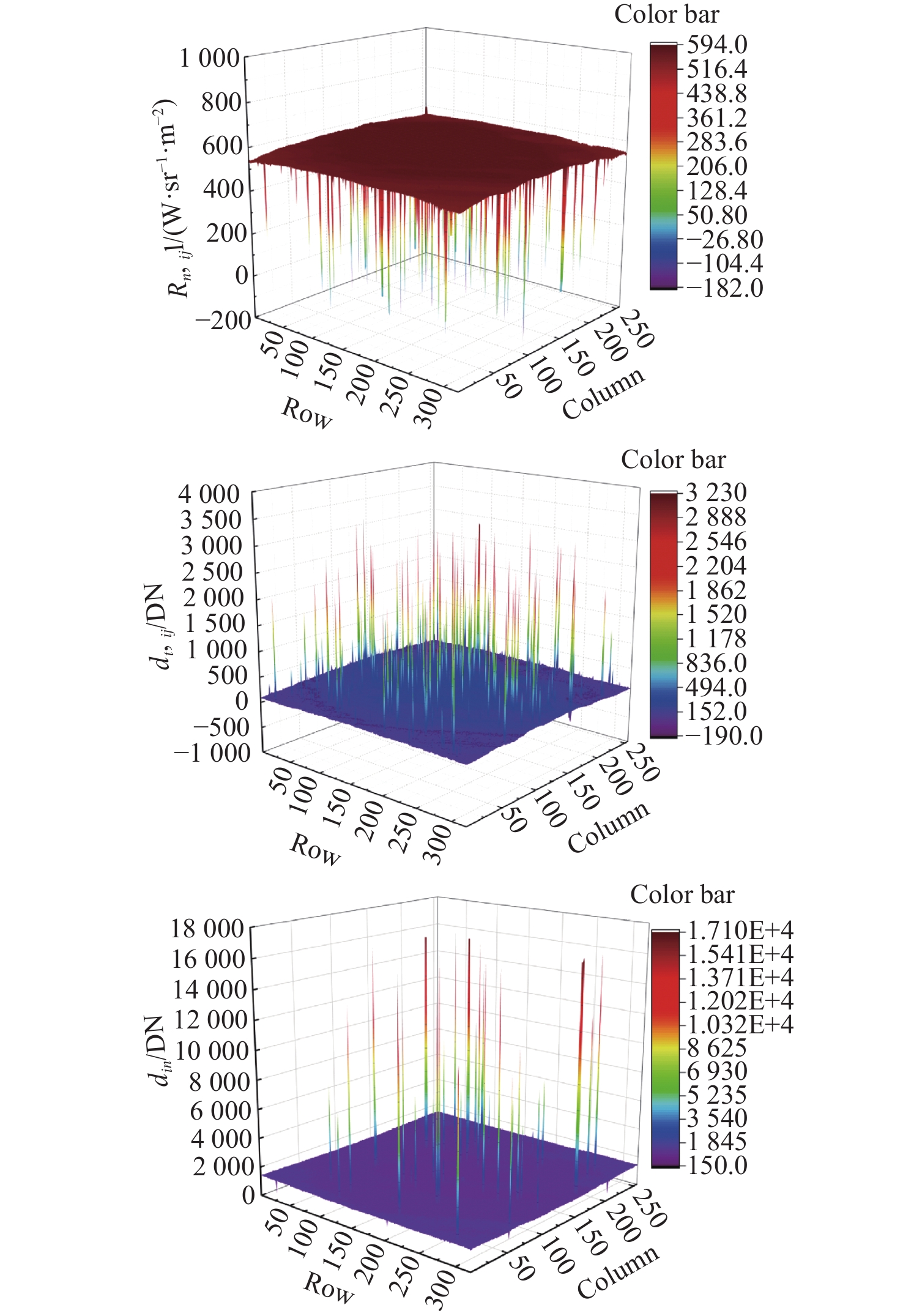
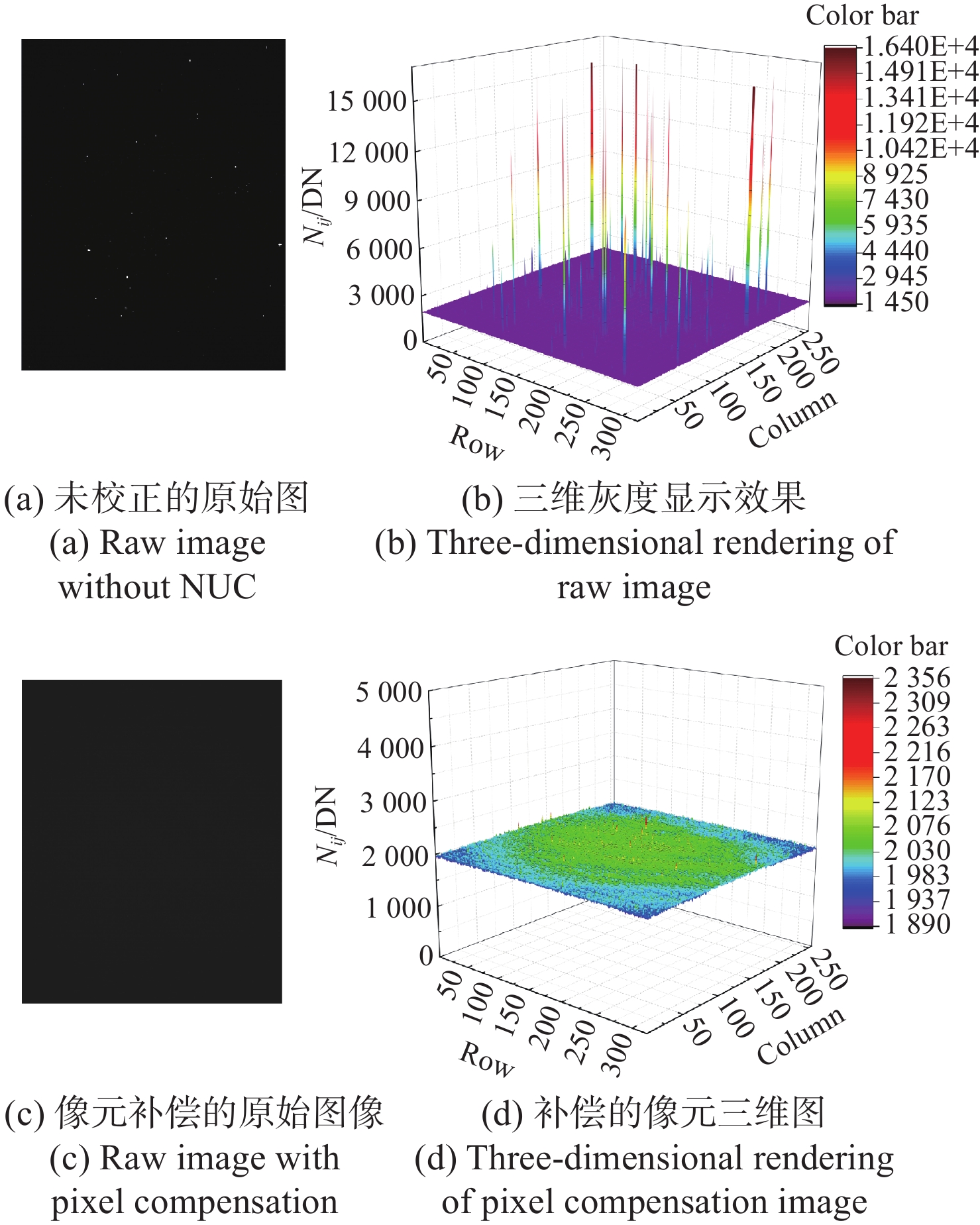
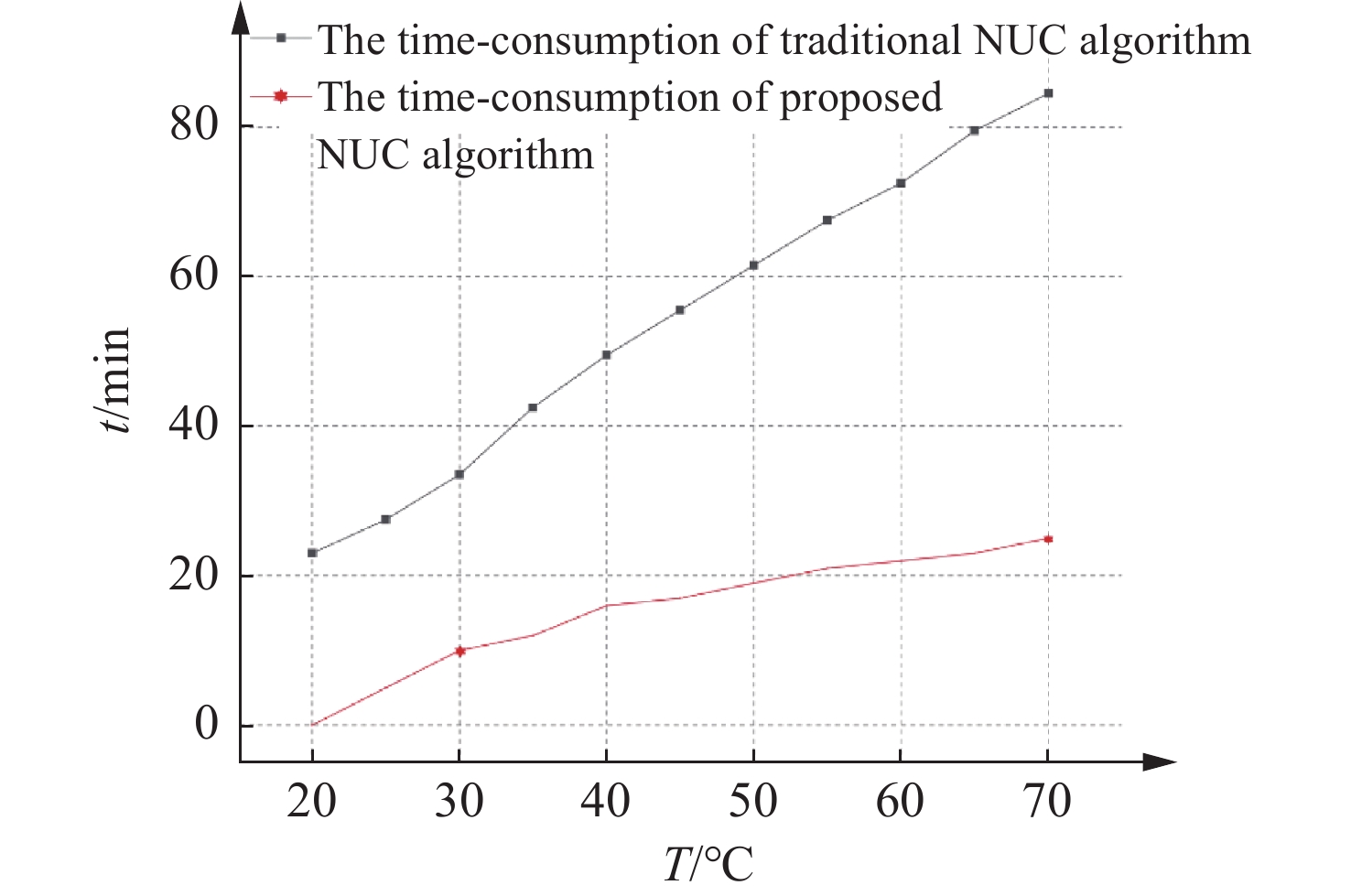
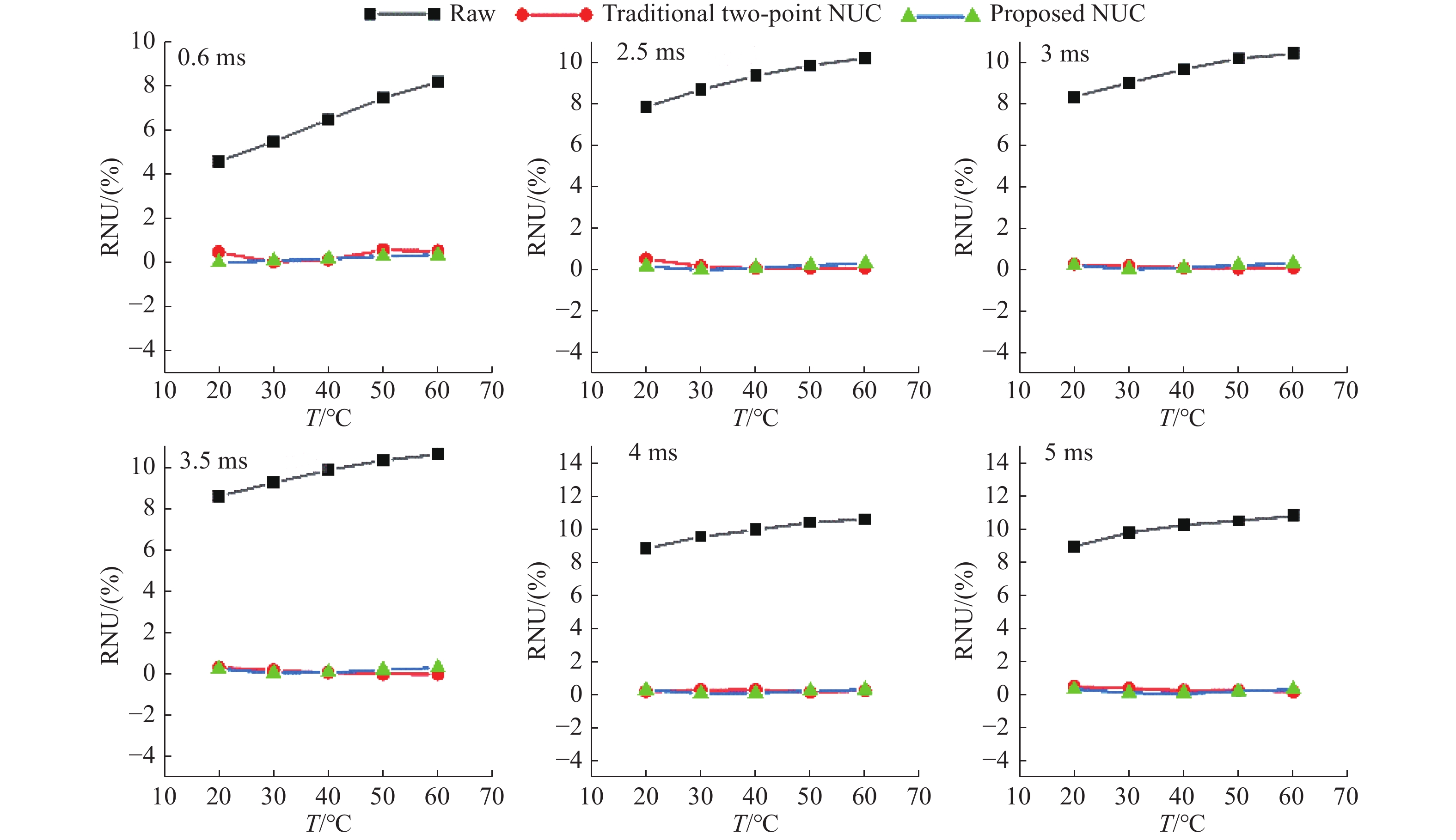
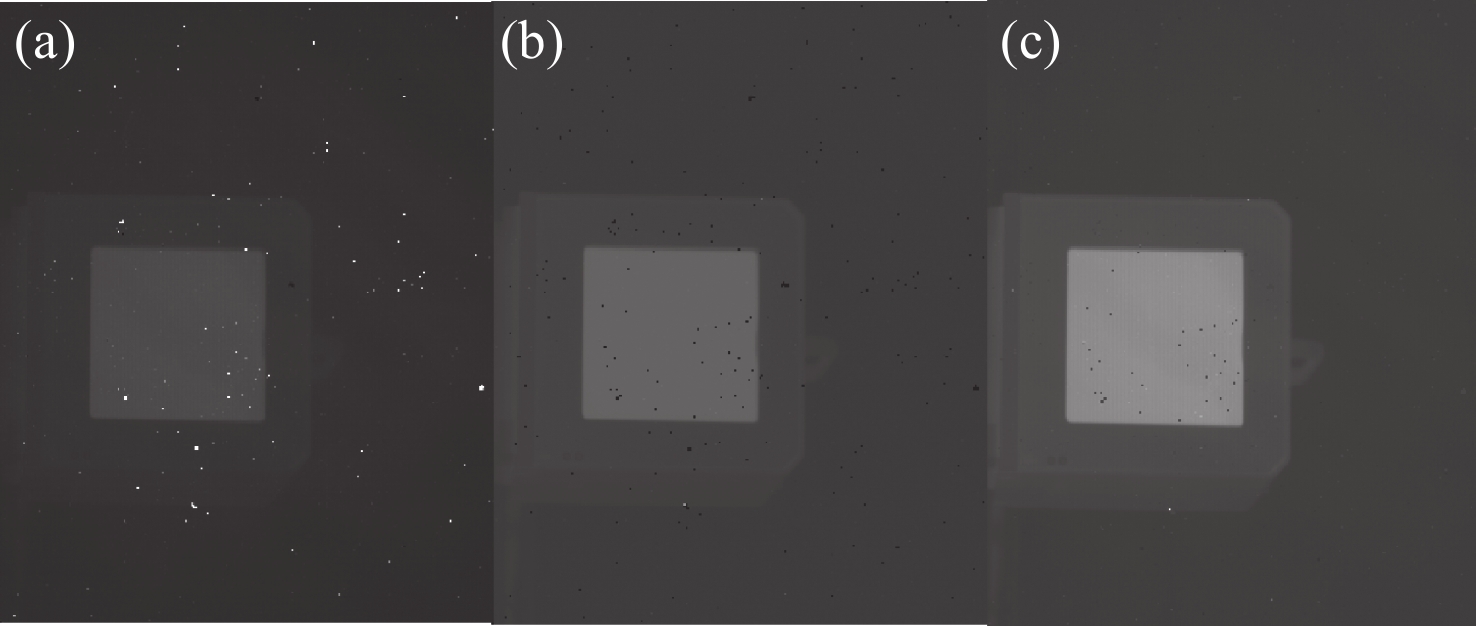
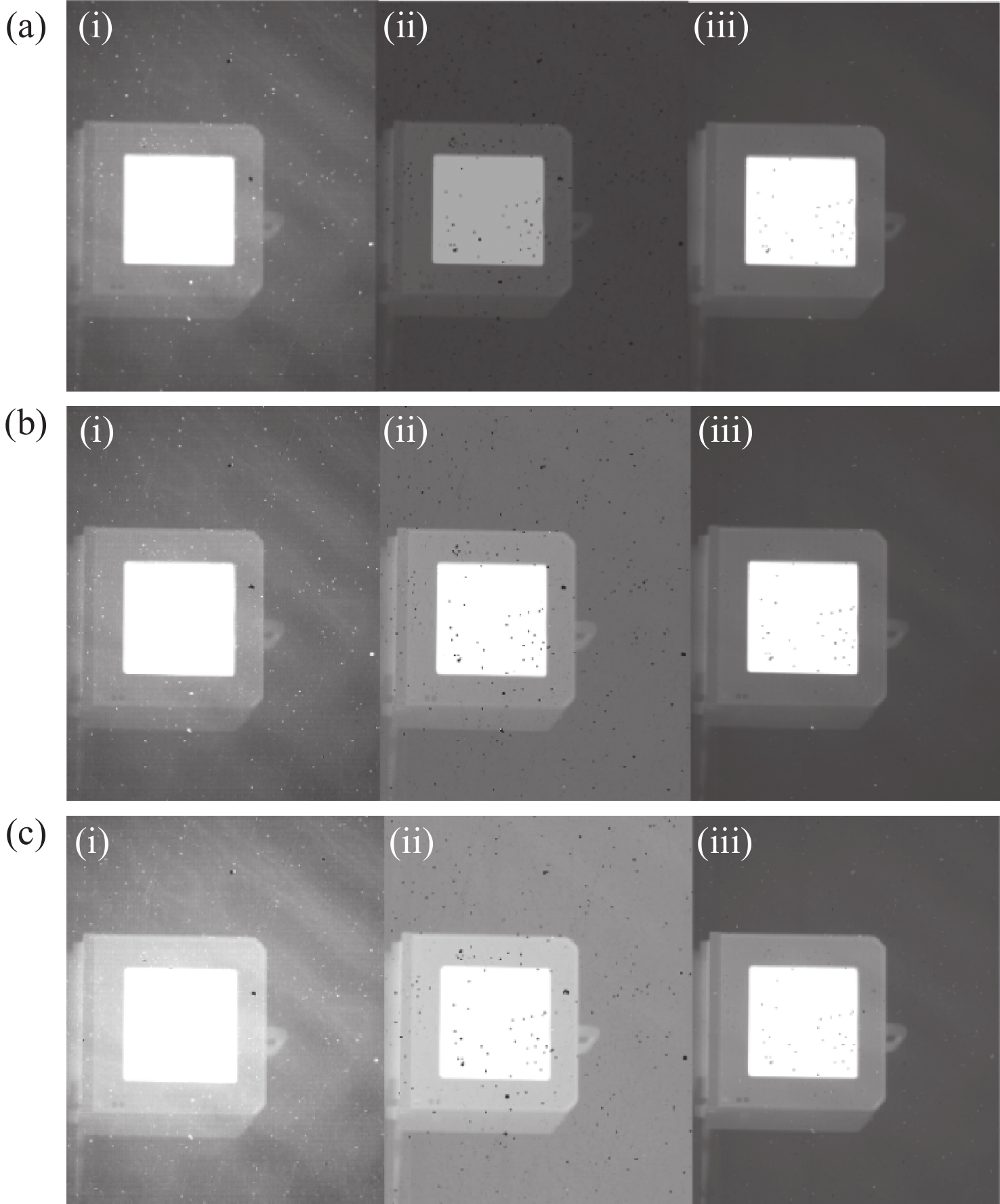
本文针对红外辐射测量系统需要积分时间连续变化的需求,提出一种快速宽动态的非均匀性校正算法。该算法考虑了积分时间效应和光学系统杂散辐射的影响,并利用25 mm口径的制冷型中波红外辐射特性测量系统进行试验验证。将本文所提算法与经典算法进行对比,结果表明,校正效率较传统非均匀性校正算法提高了3.4倍。本文还利用剩余残差评价原始图像以及两种算法的图像校正效果,利用多个积分时间(0.6 ms,3 ms和3.5 ms)模拟连续变化的积分。结果显示本文算法在各个积分时间下剩余残差均表现稳定且校正图像都具有良好的校正效果。
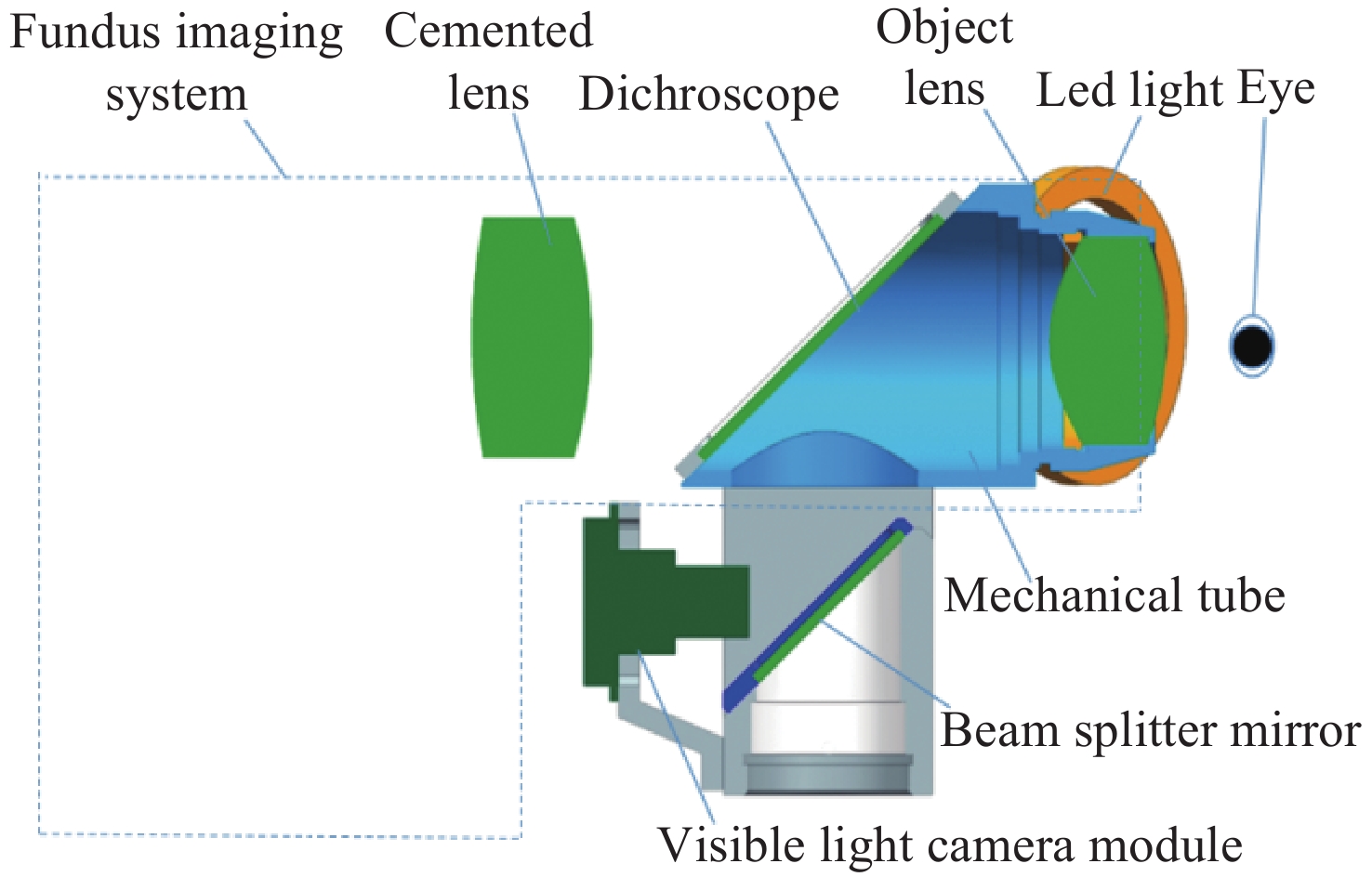
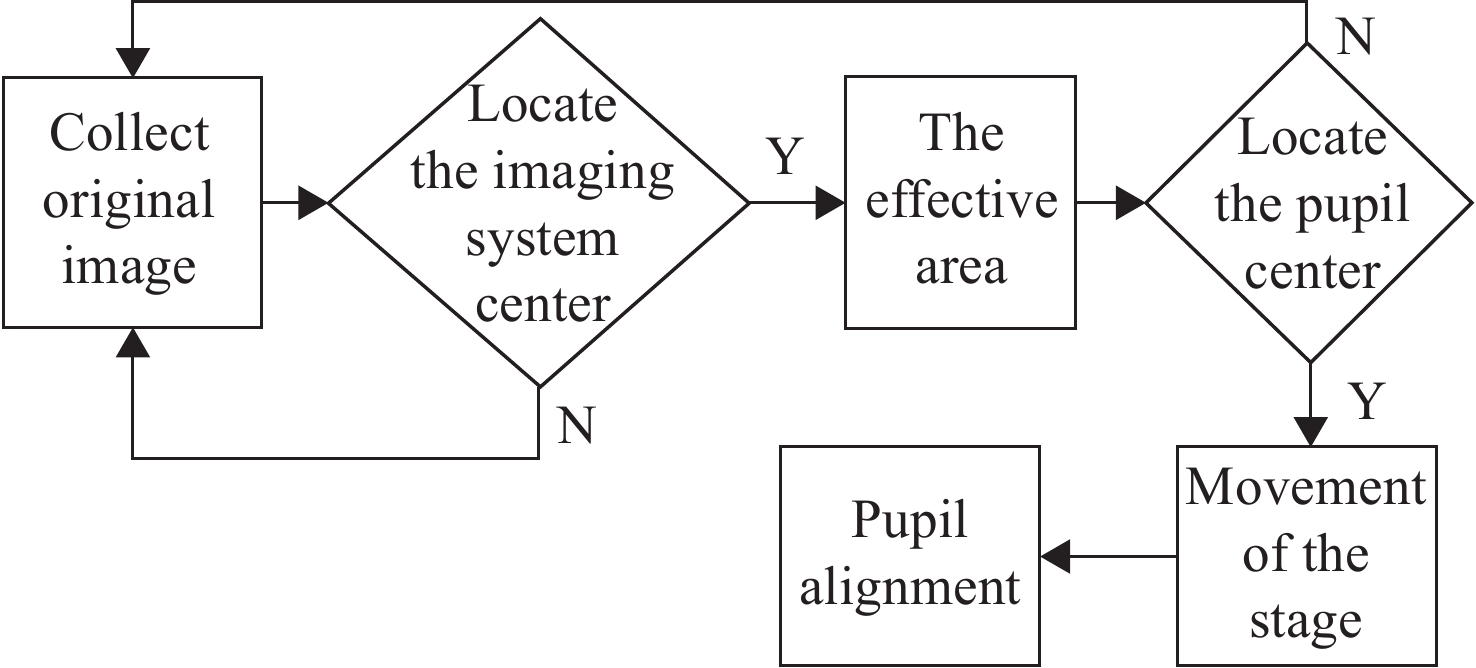
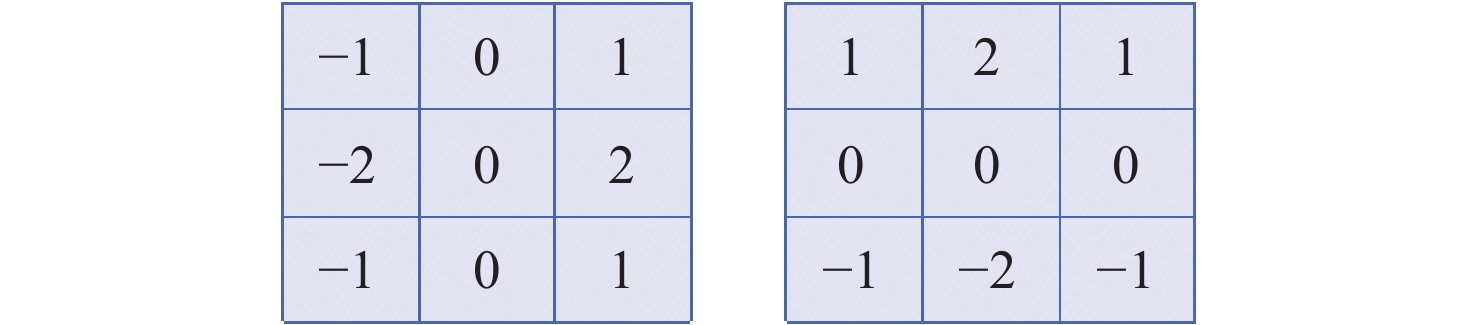
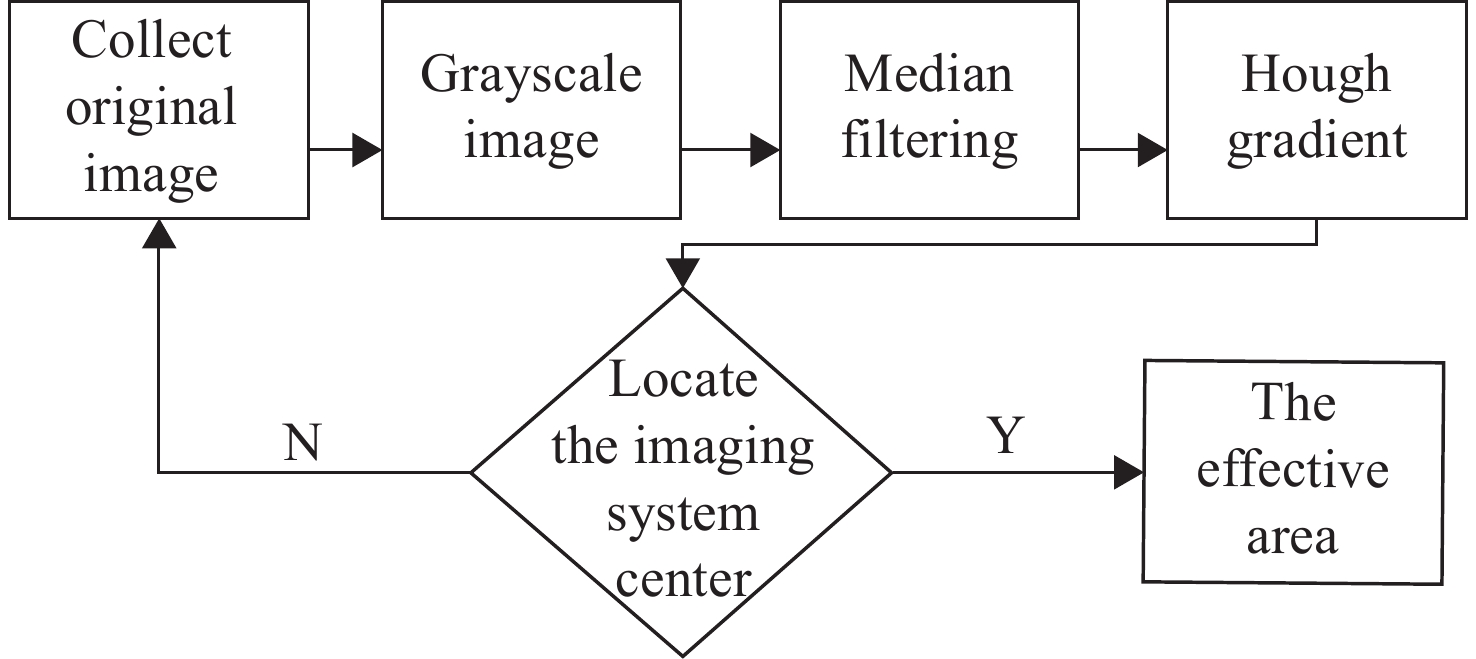
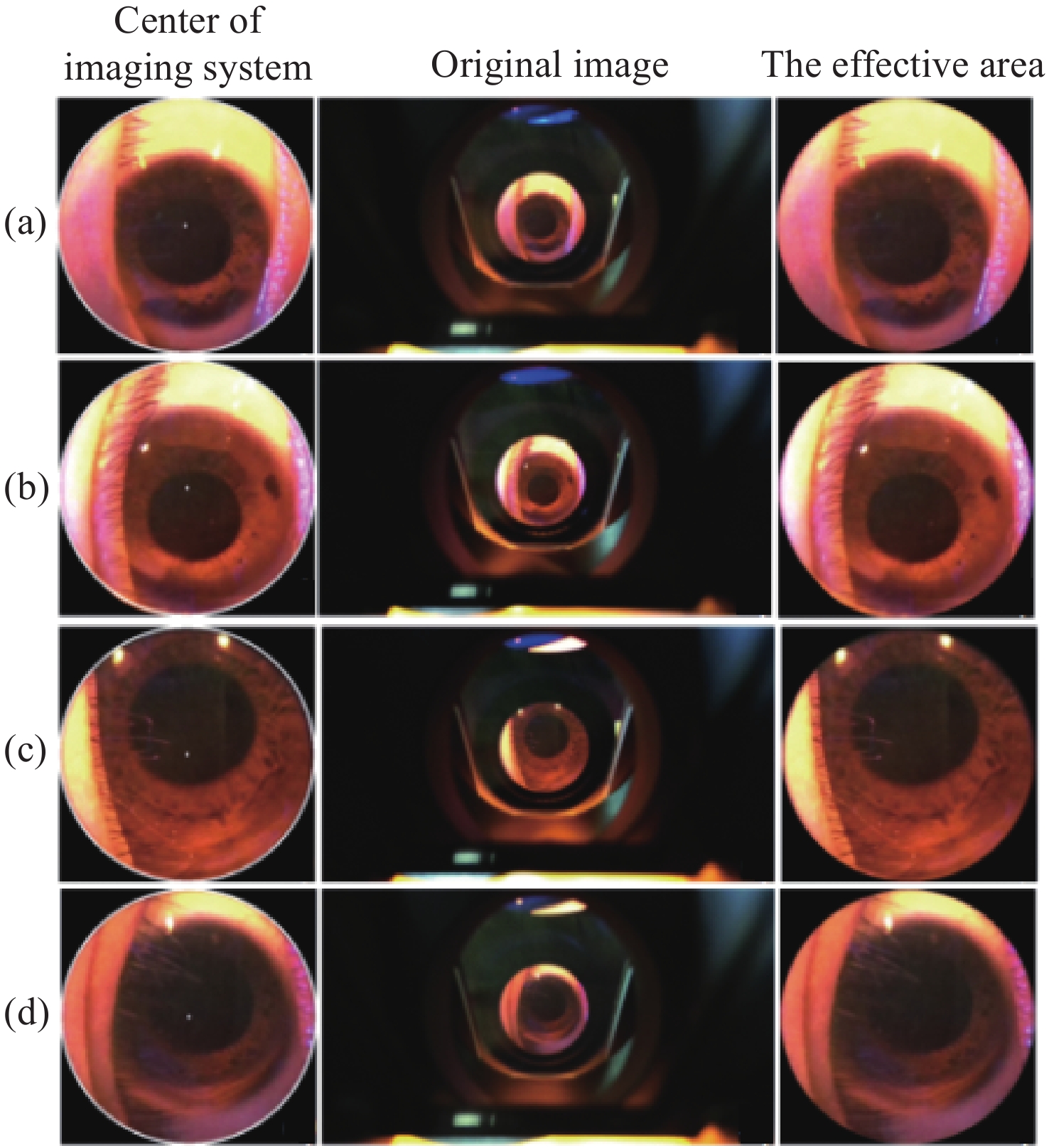
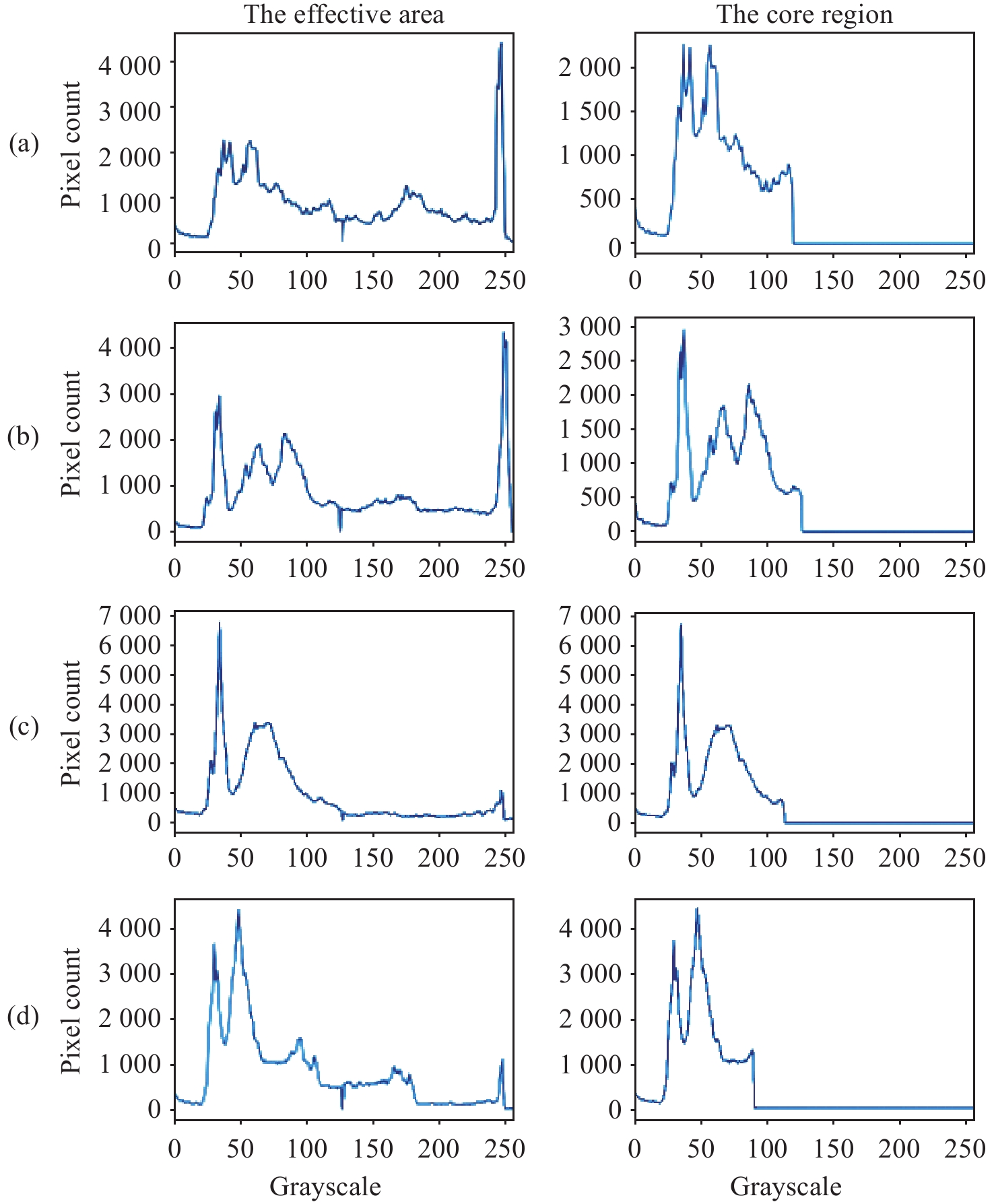
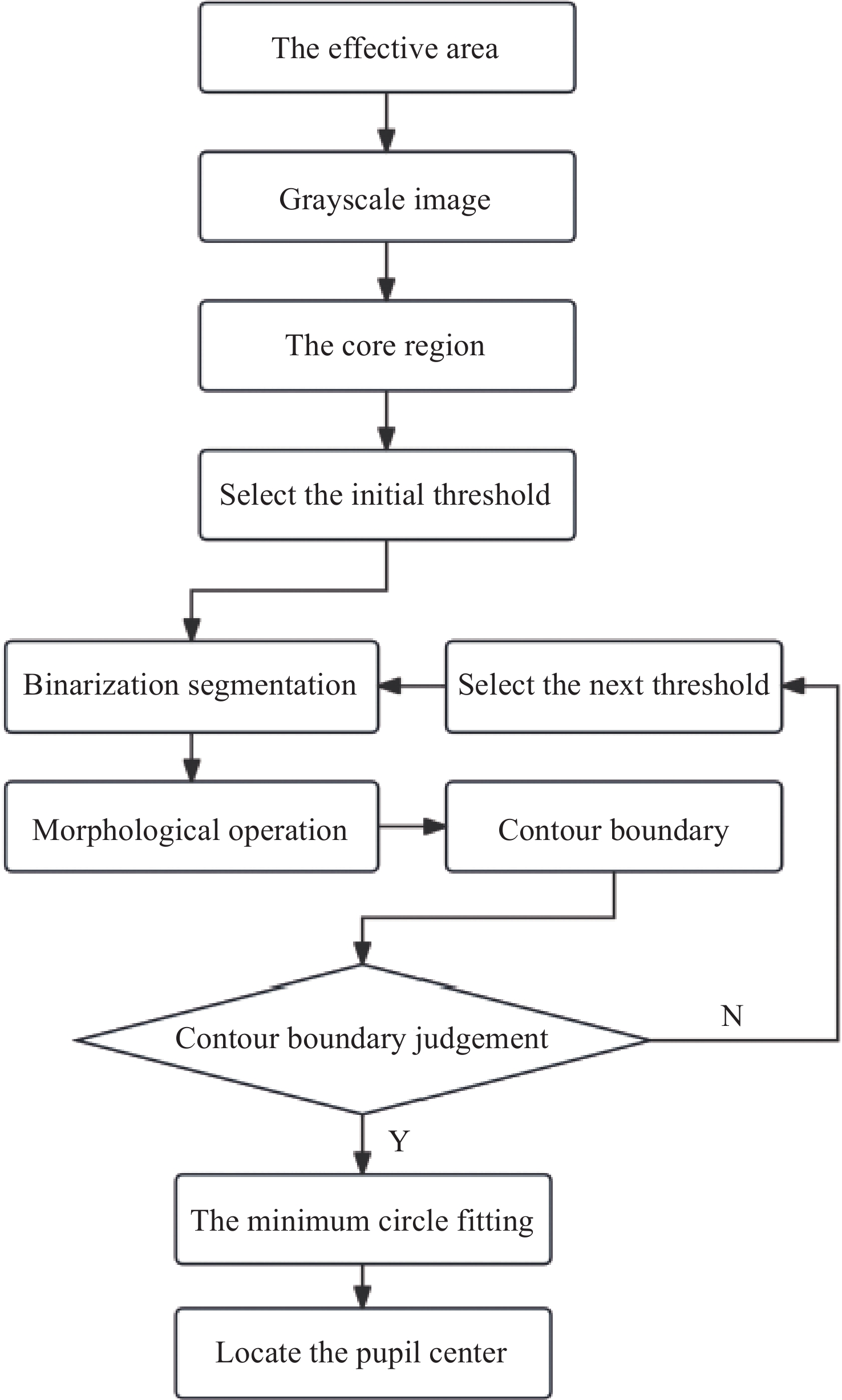
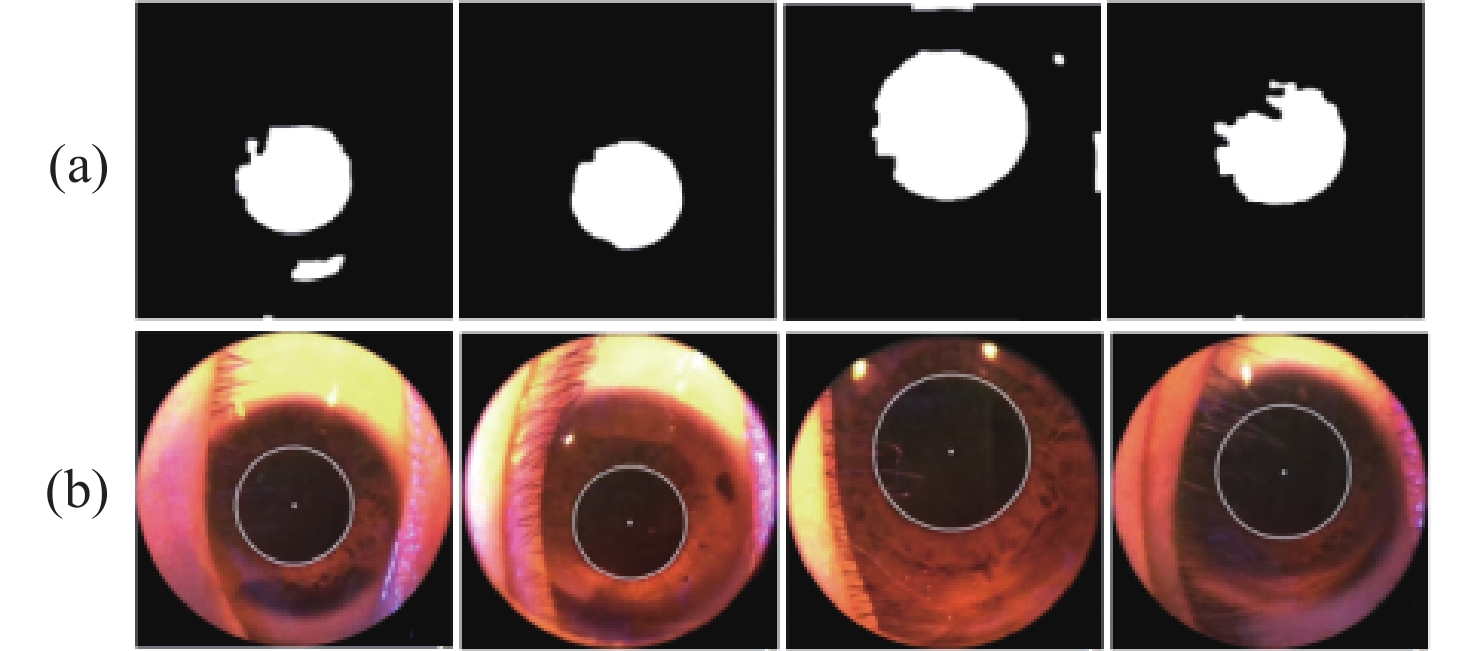
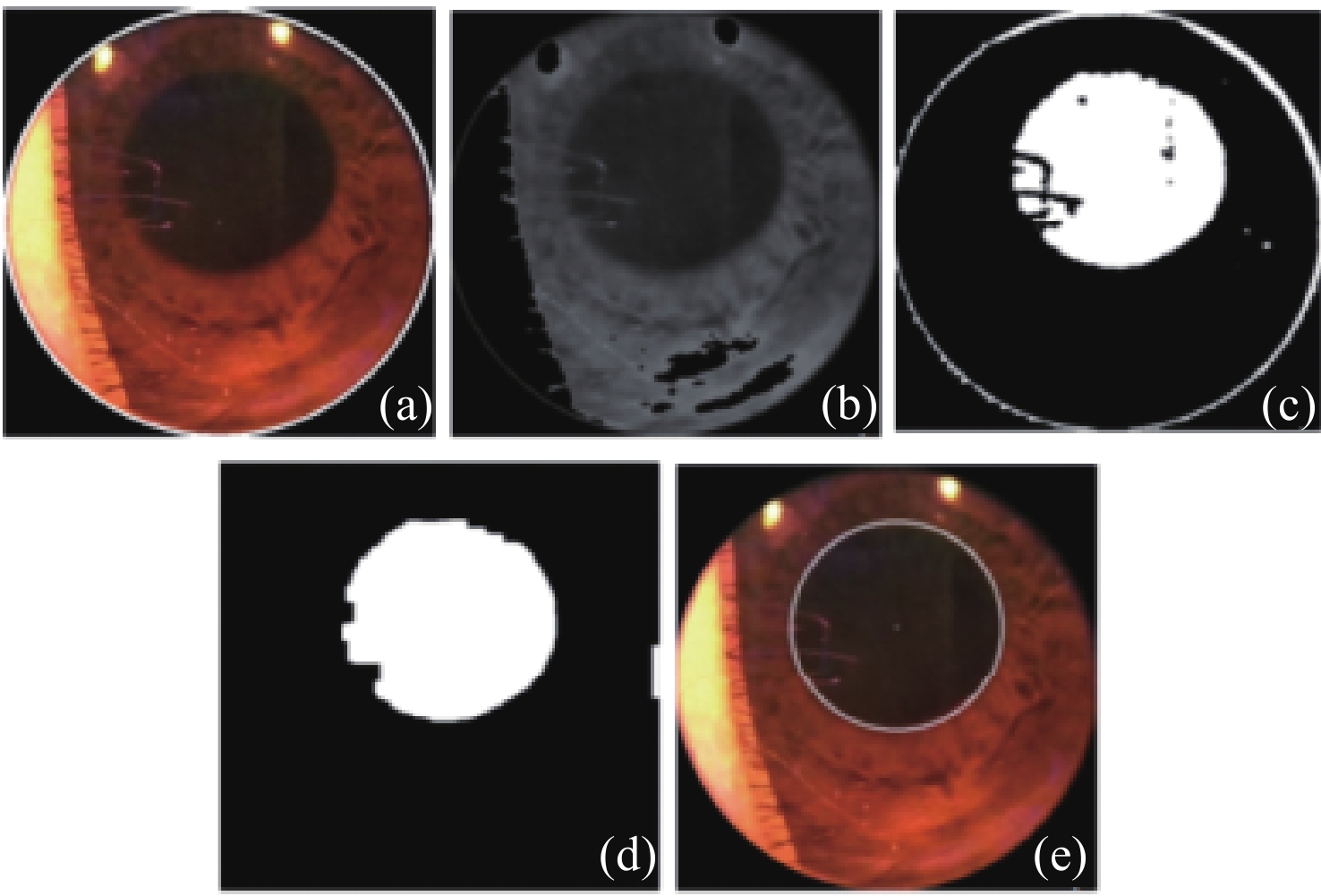
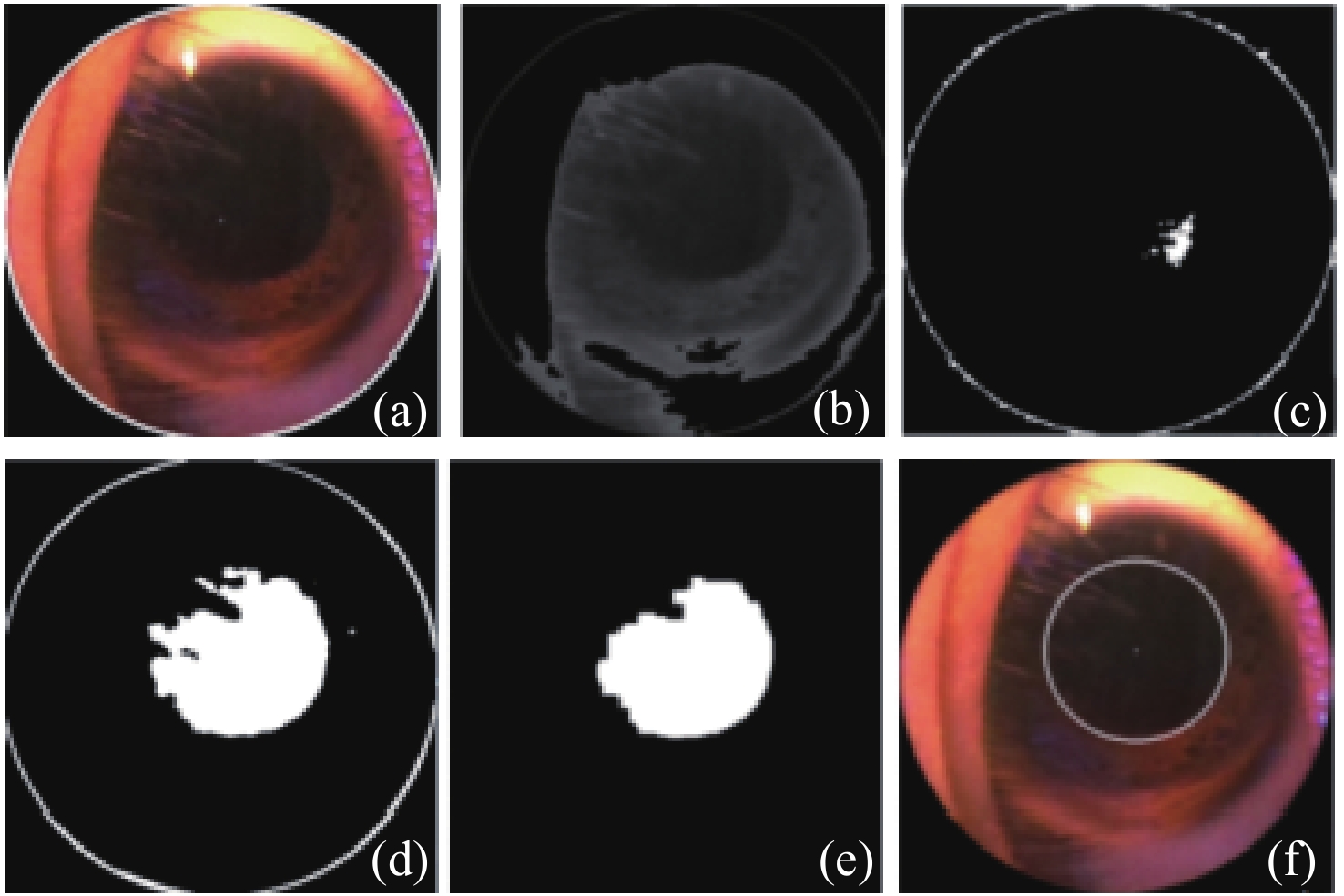
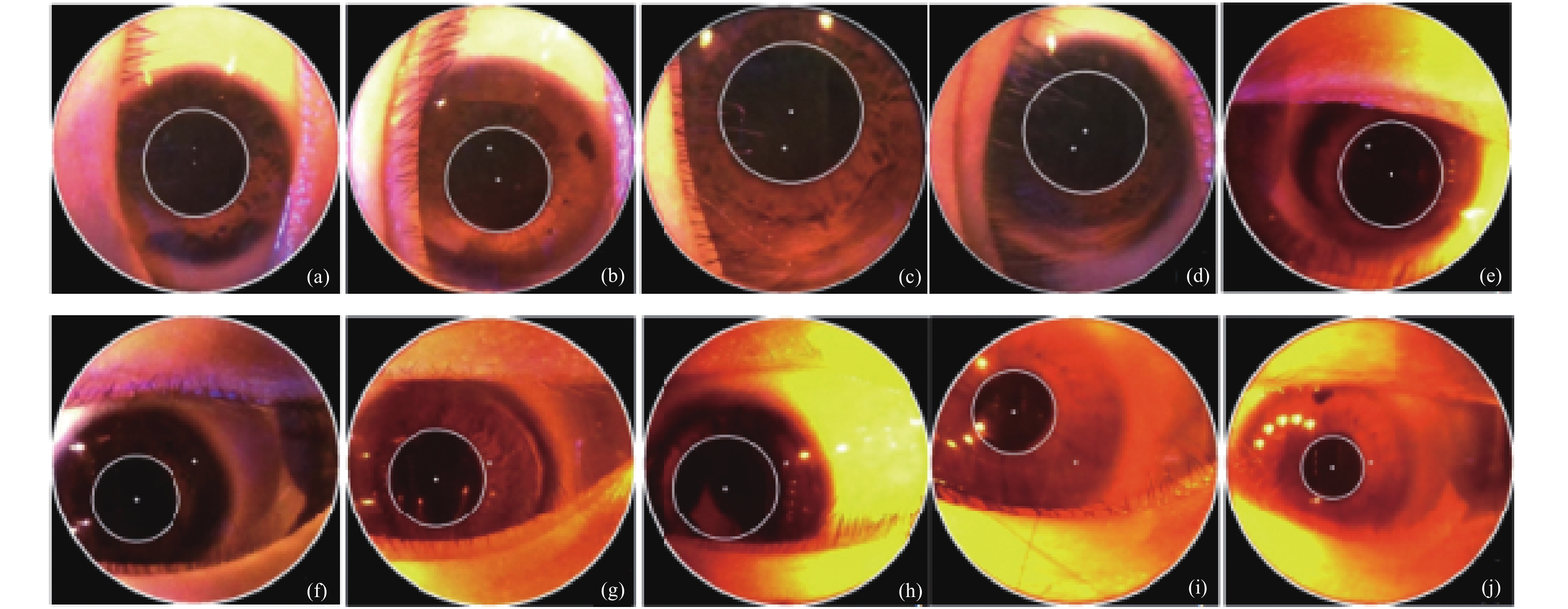
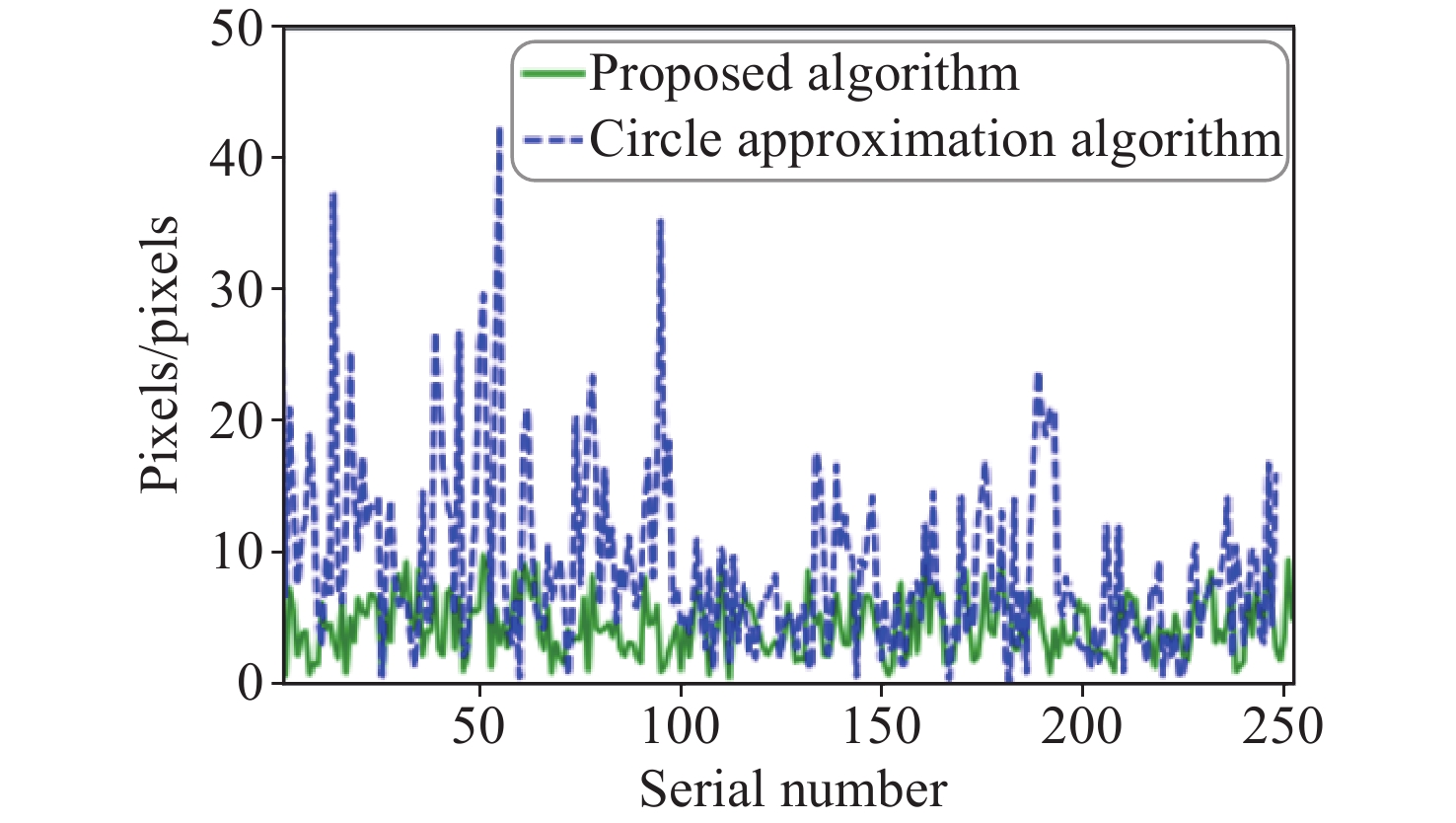
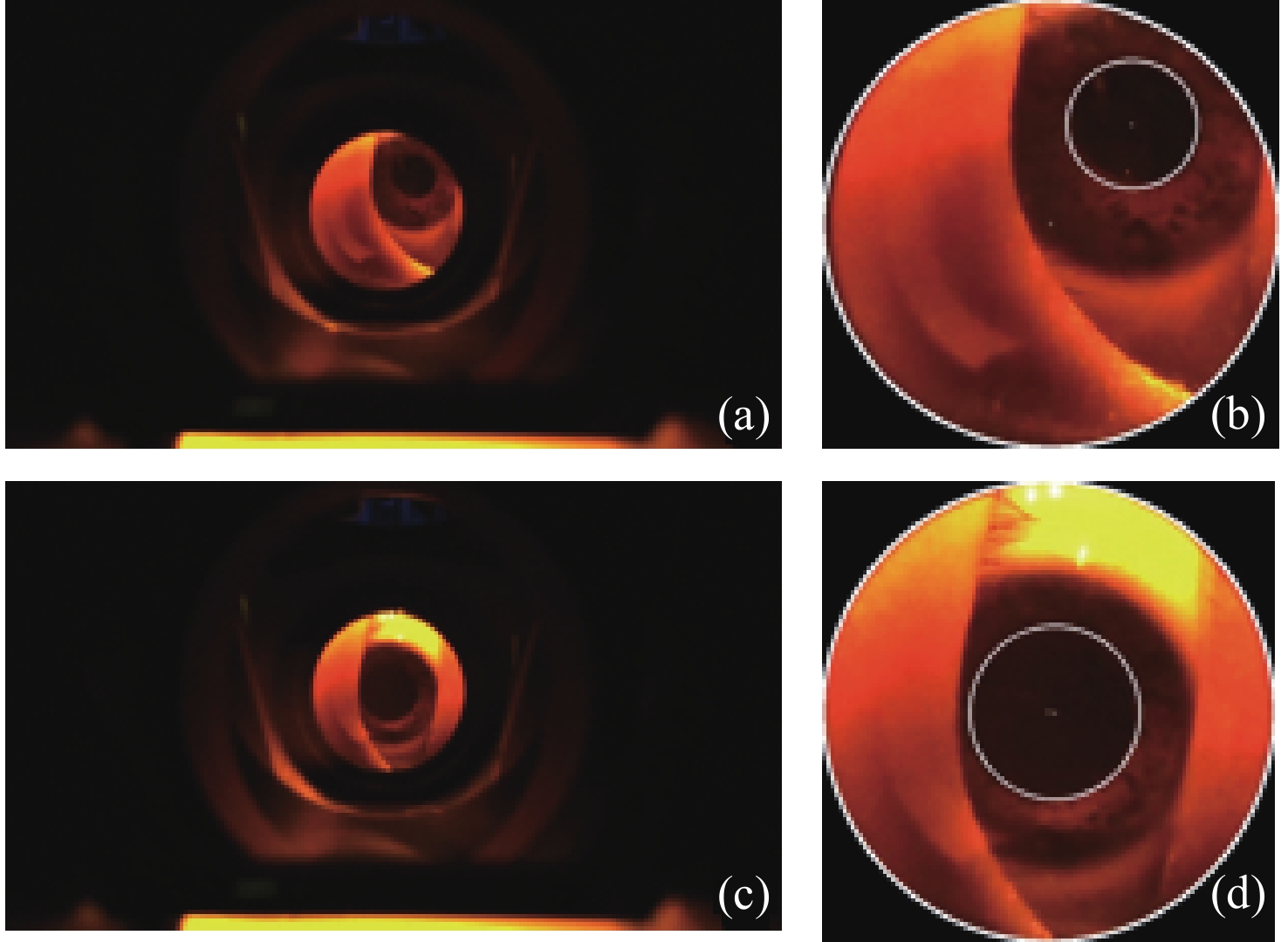
为了降低眼底成像过程对操作人员水平的依赖,提出了一种采用可见光瞳孔成像的人眼瞳孔自动快速定位与对准方法。采用可见光摄像模组和三维电动位移台,在实验室眼底成像系统上搭建瞳孔对准装置。用霍夫梯度法提取图像的有效区域,得到眼底成像系统的中心。利用最大类间方差法和图像直方图特征得到了瞳孔区域后,利用最小圆拟合方法确定瞳孔中心。通过反馈控制电动位移台的移动,实现眼底成像系统中心与瞳孔中心对准。实验结果表明:人眼瞳孔的平均识别速度为0.11 s,瞳孔中心的识别平均准确率达98.7%,中心偏差的平均欧氏距离为4.3个像素。上述结果满足眼底成像系统的实时性和准确性要求,为眼底成像系统提供了一种高效的自动瞳孔对准解决方案。
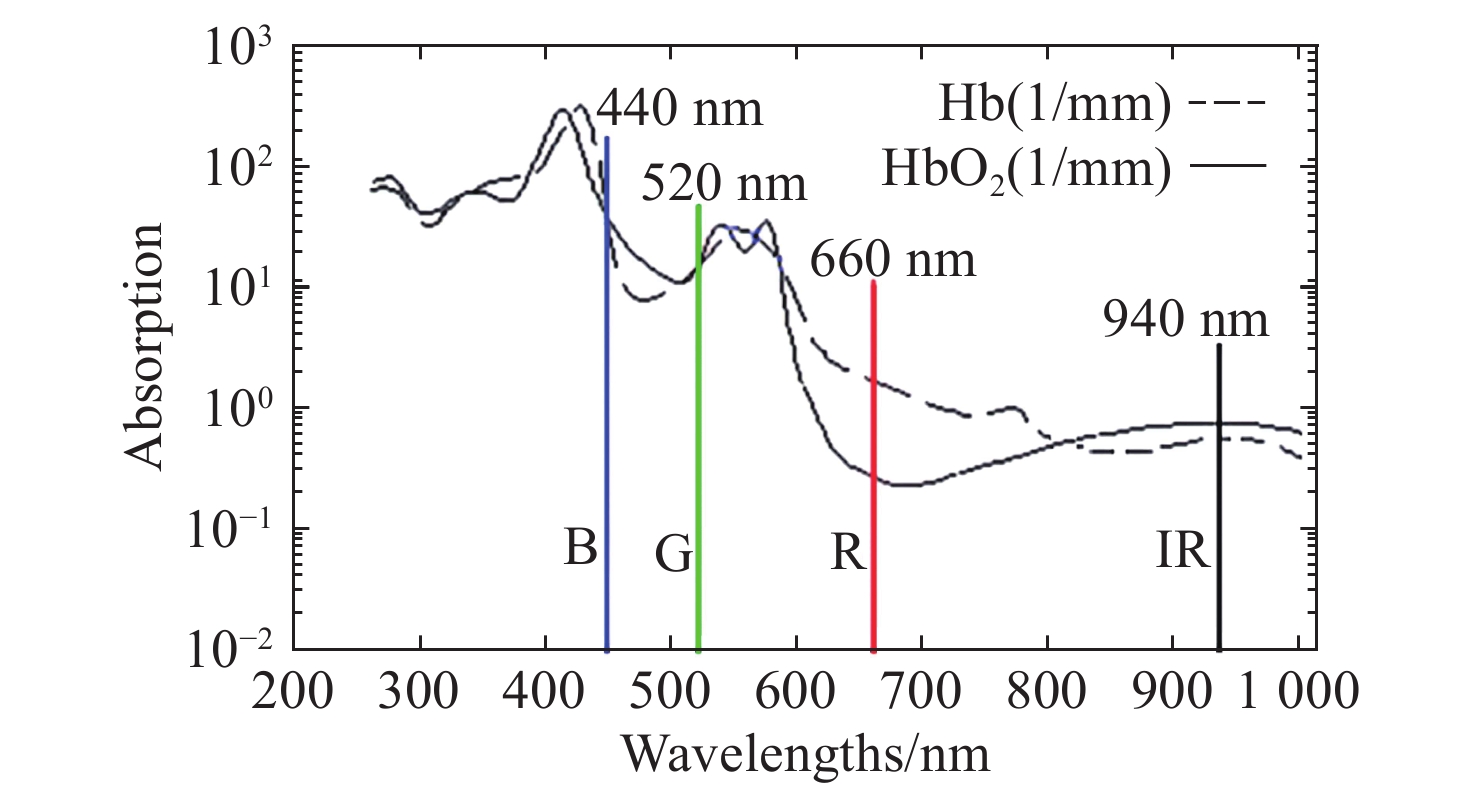
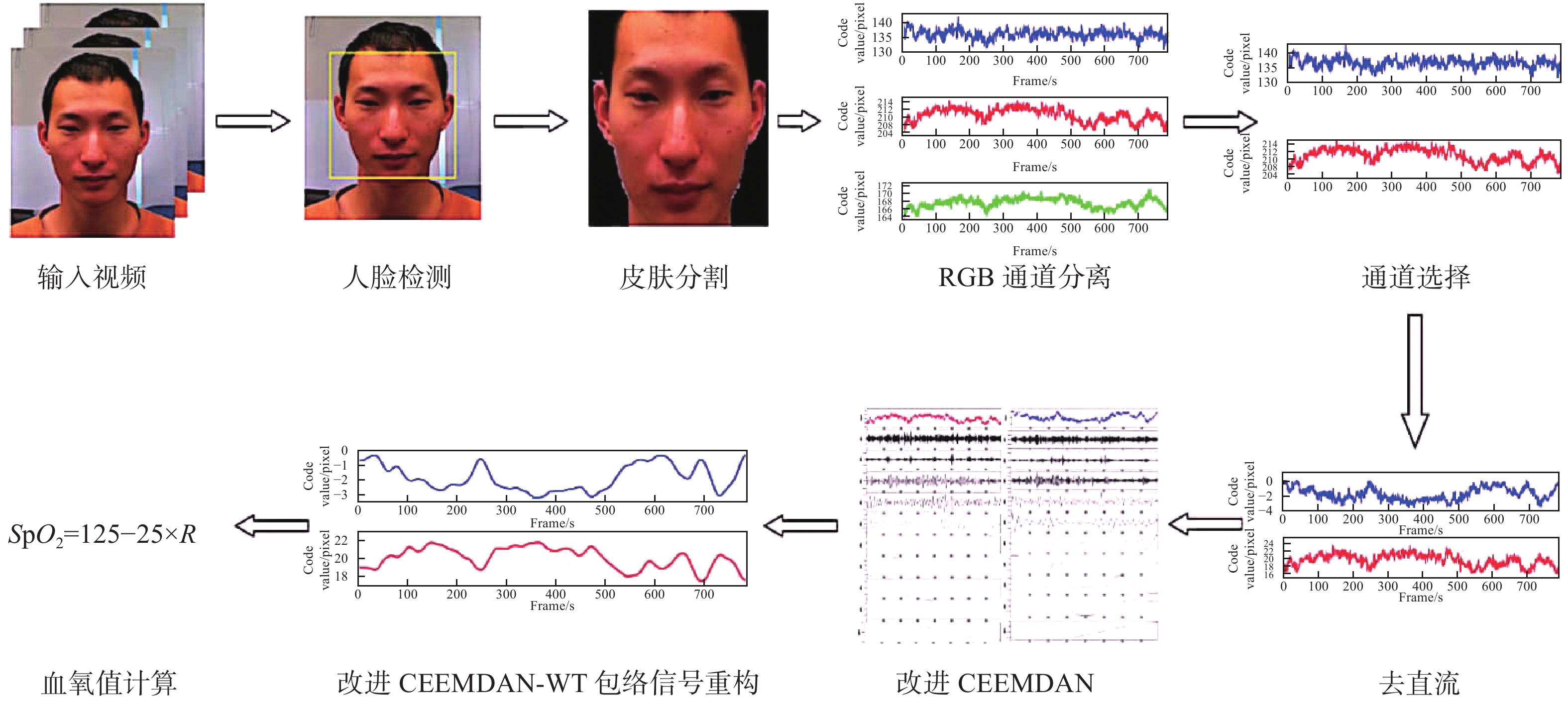
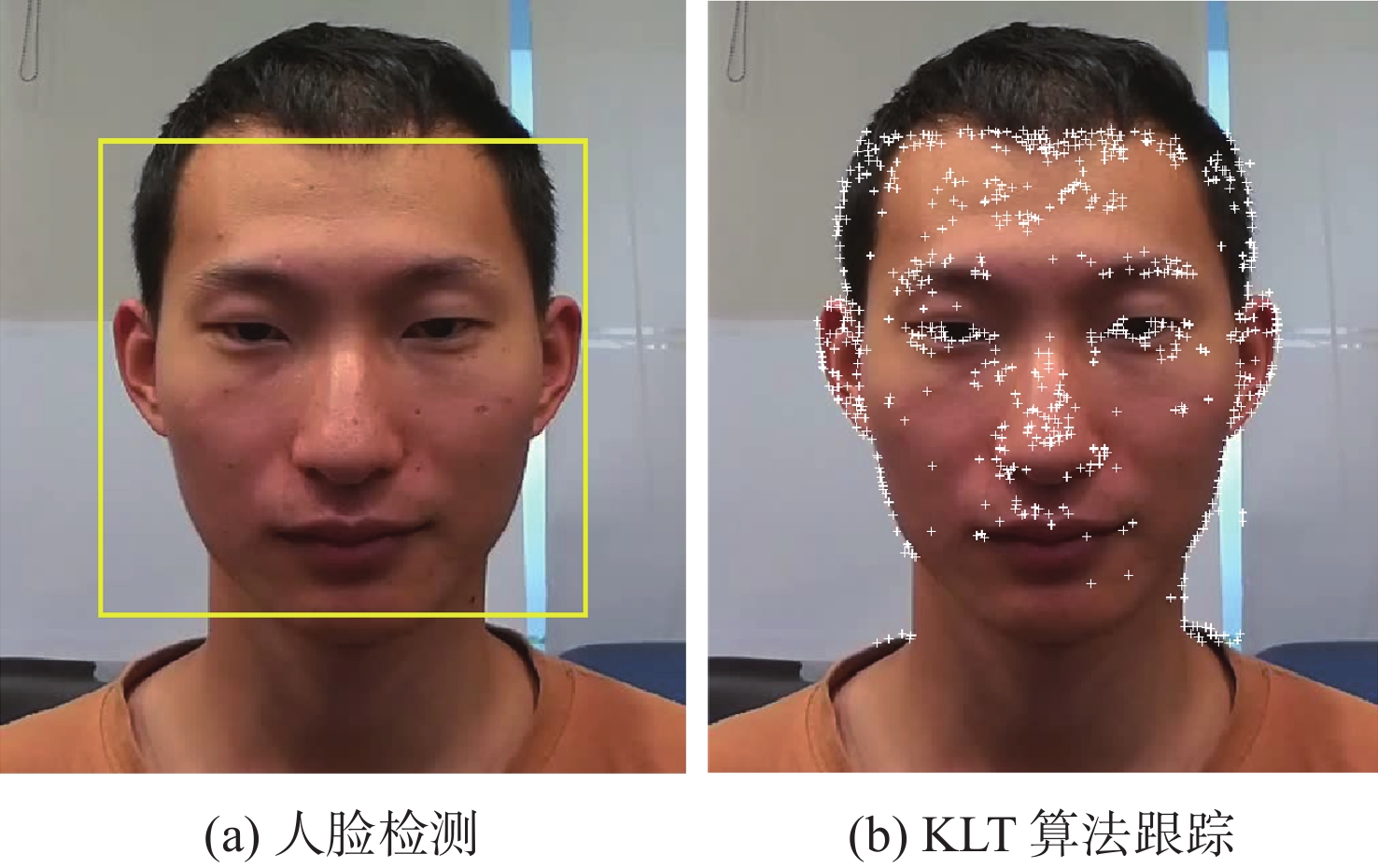
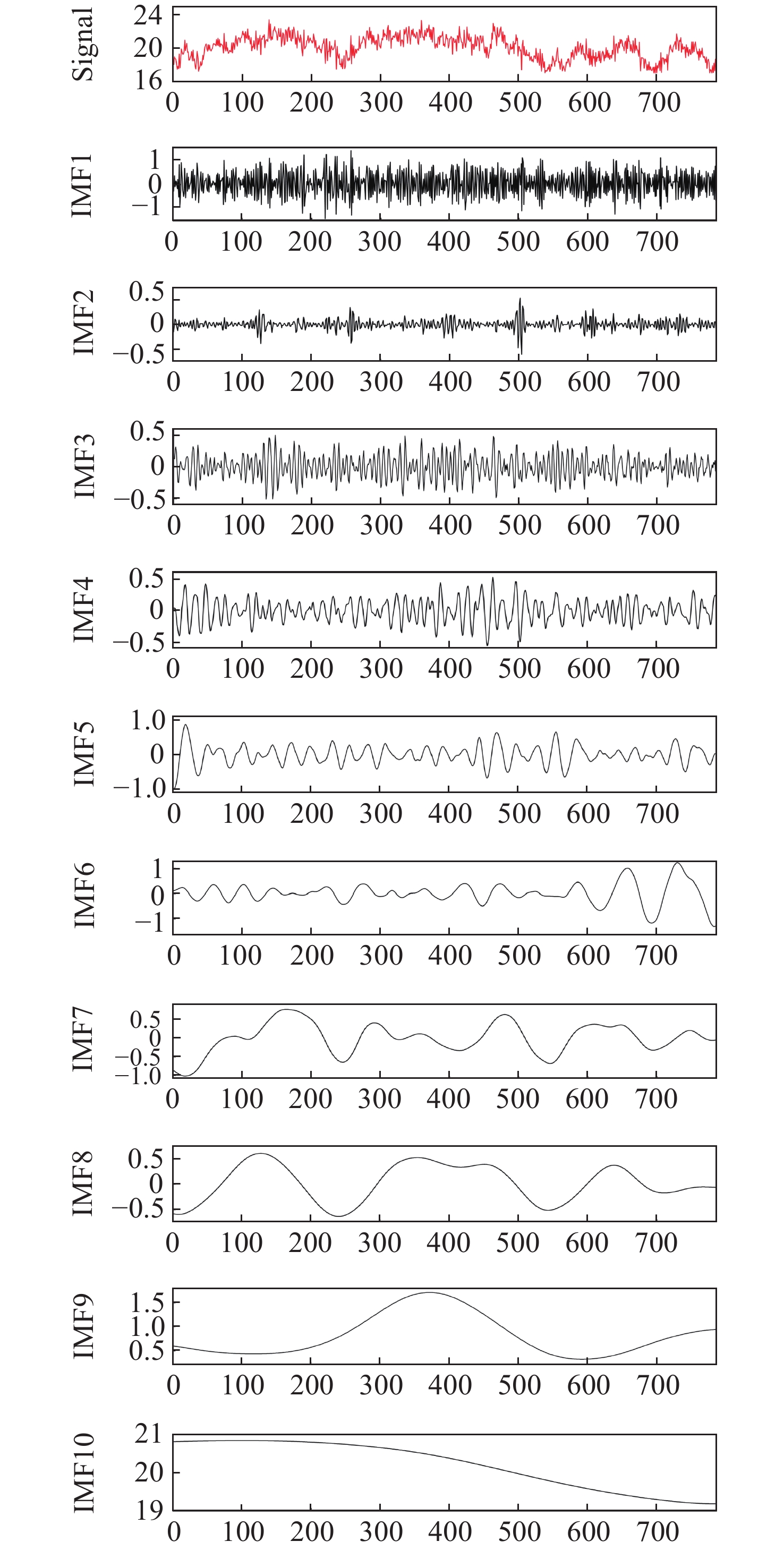
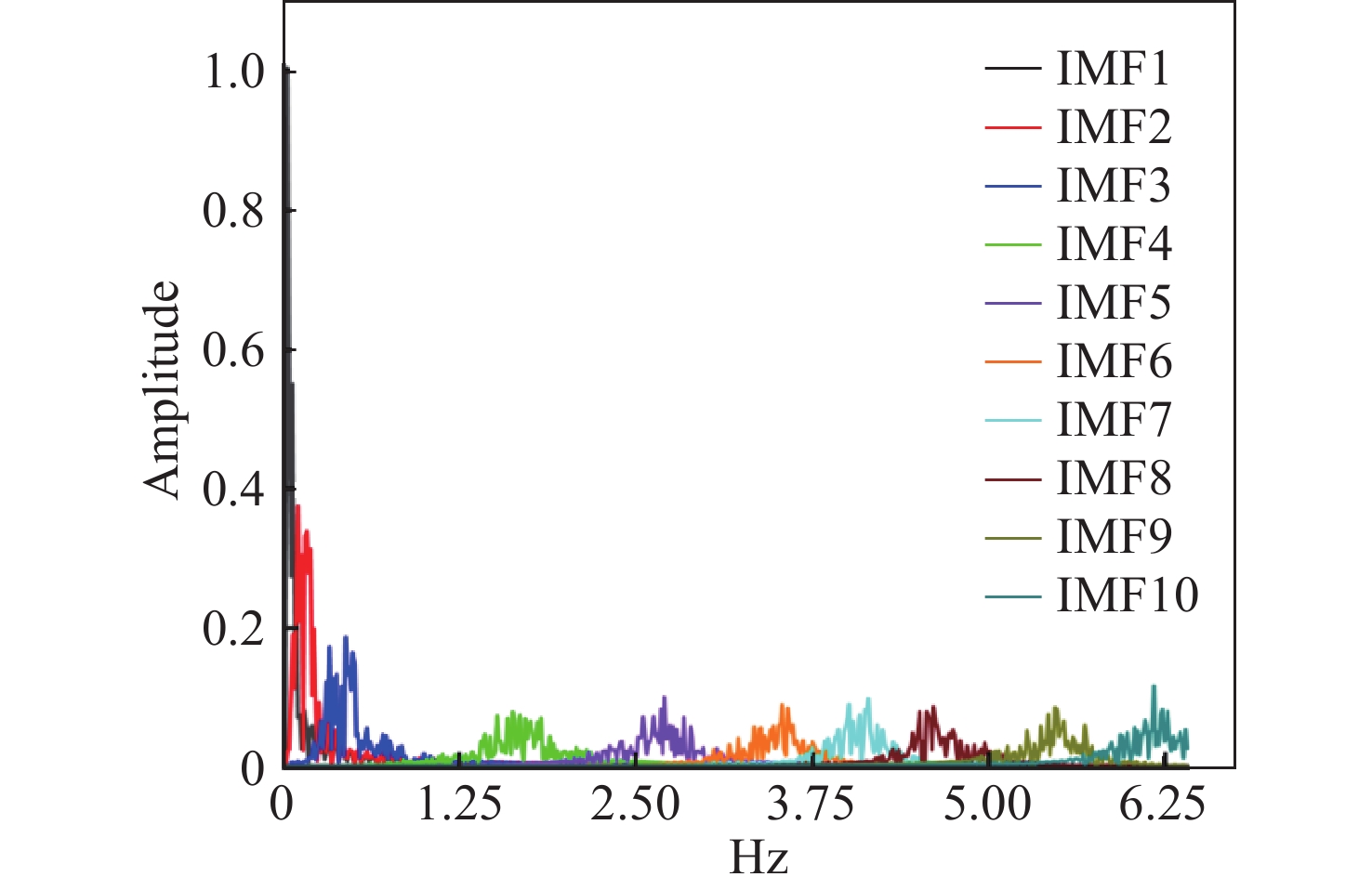
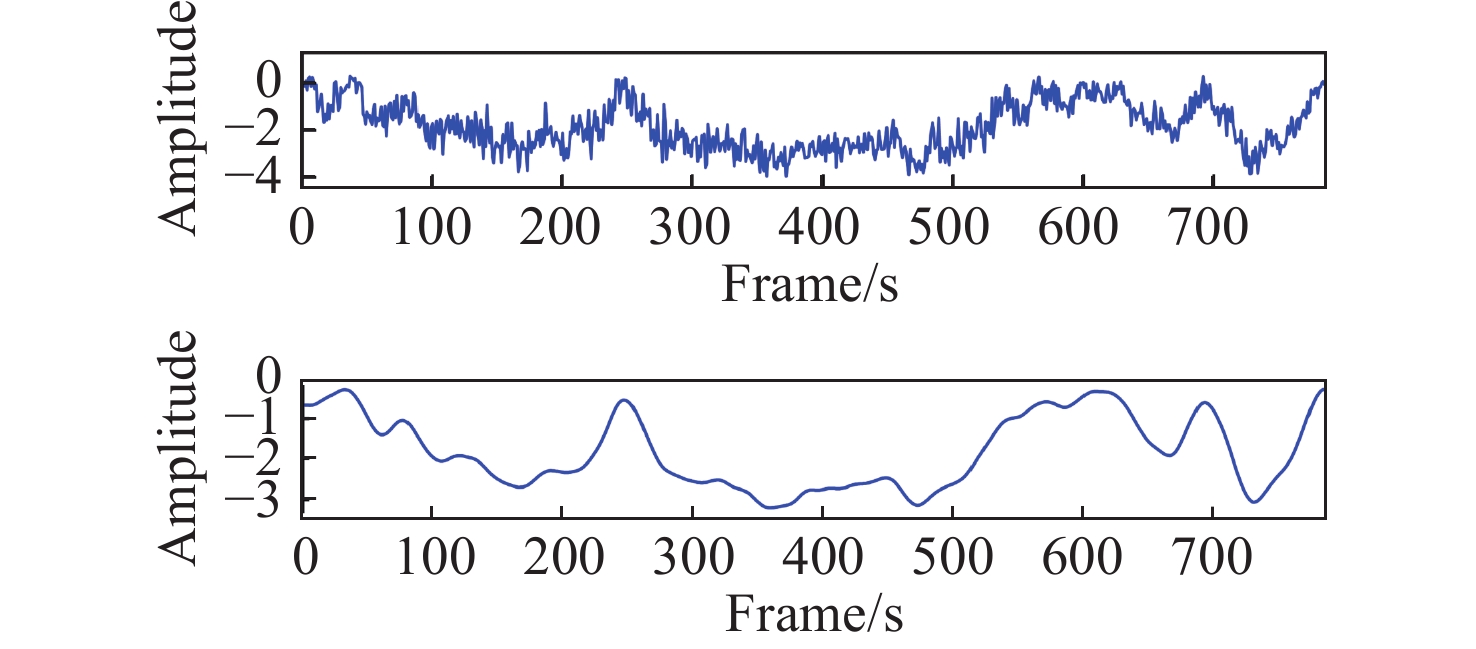
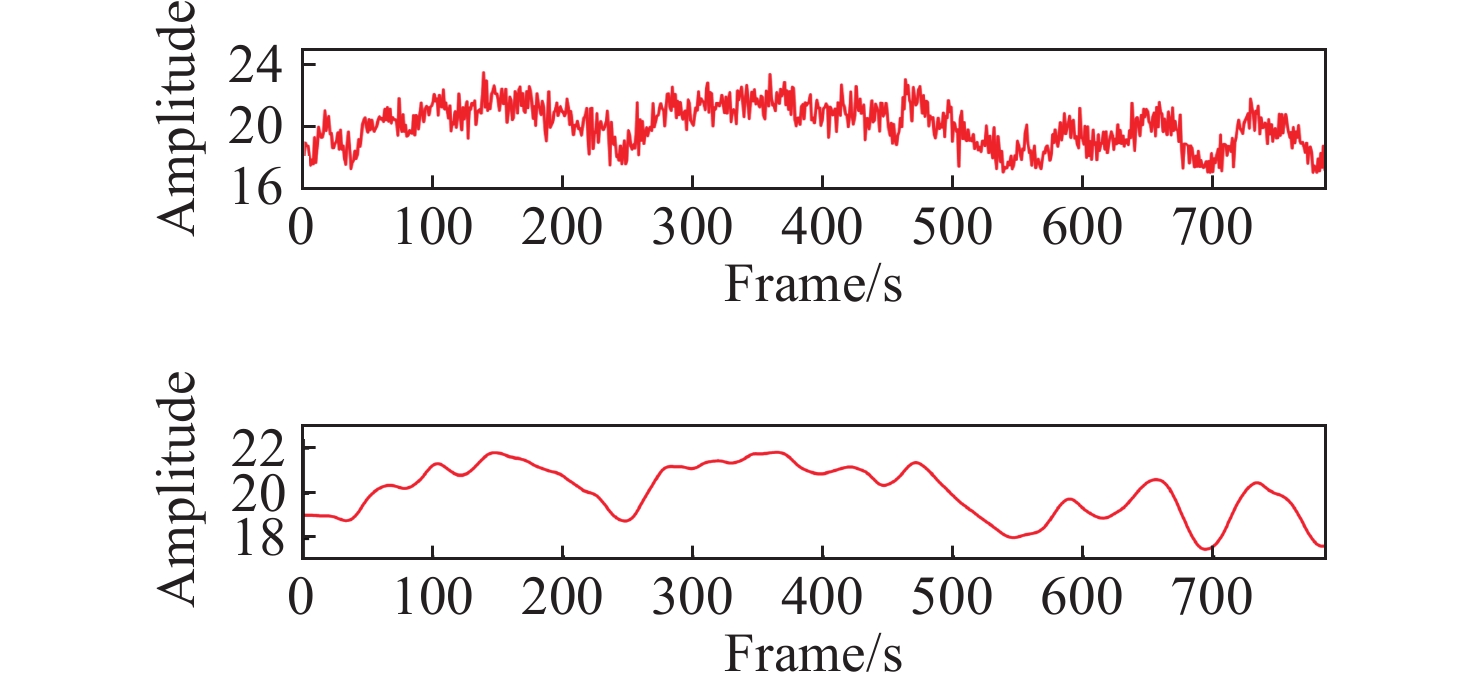
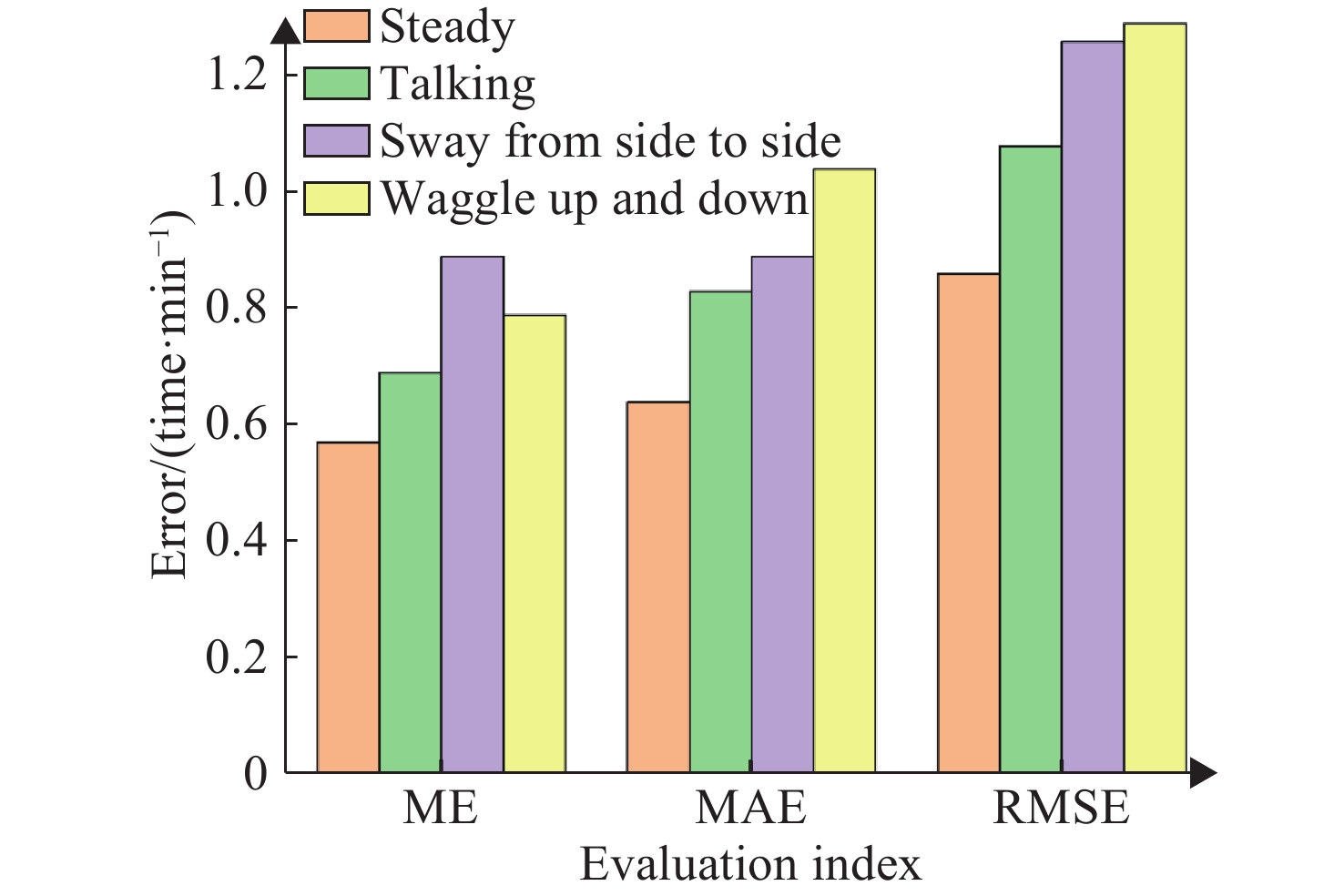
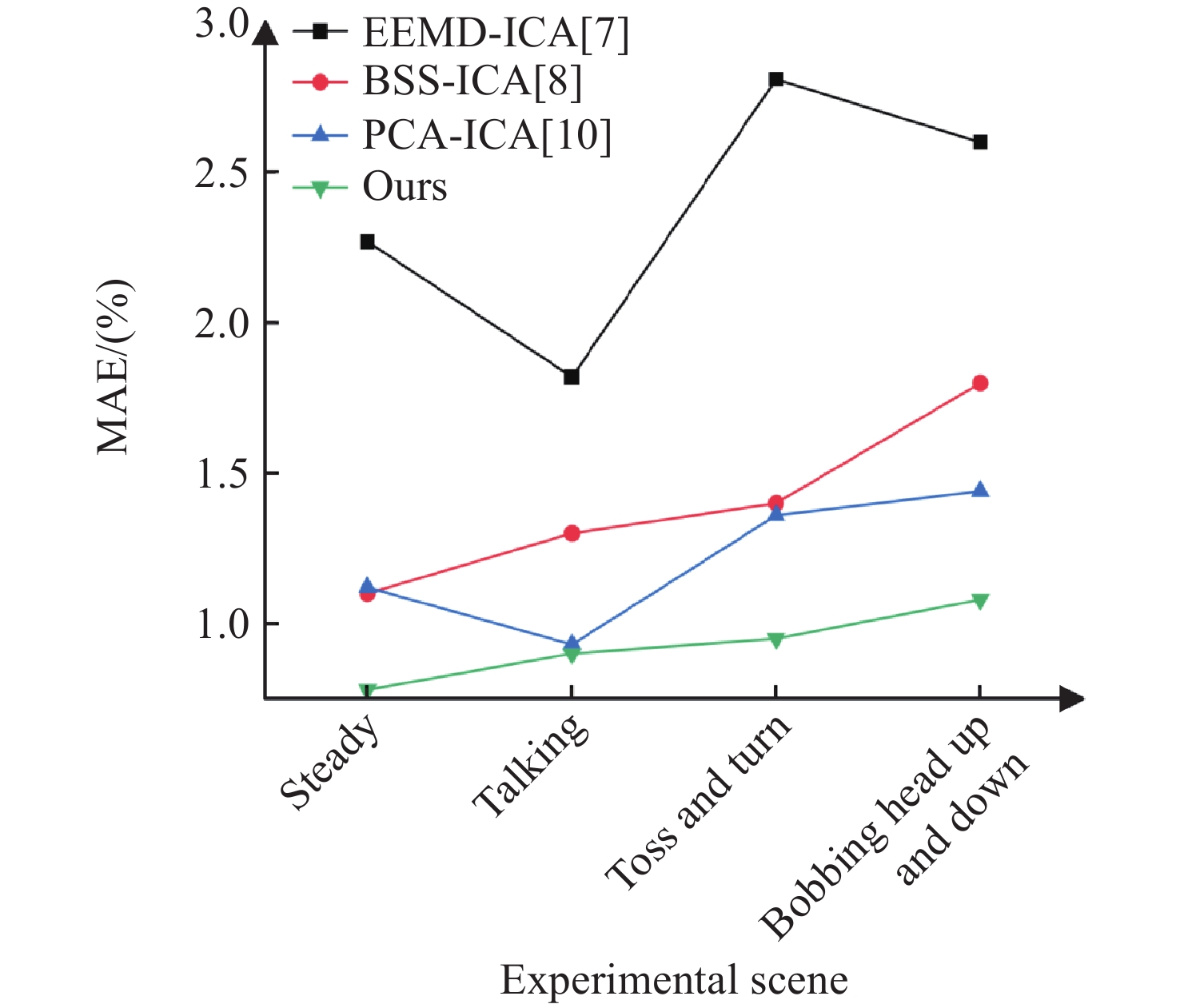
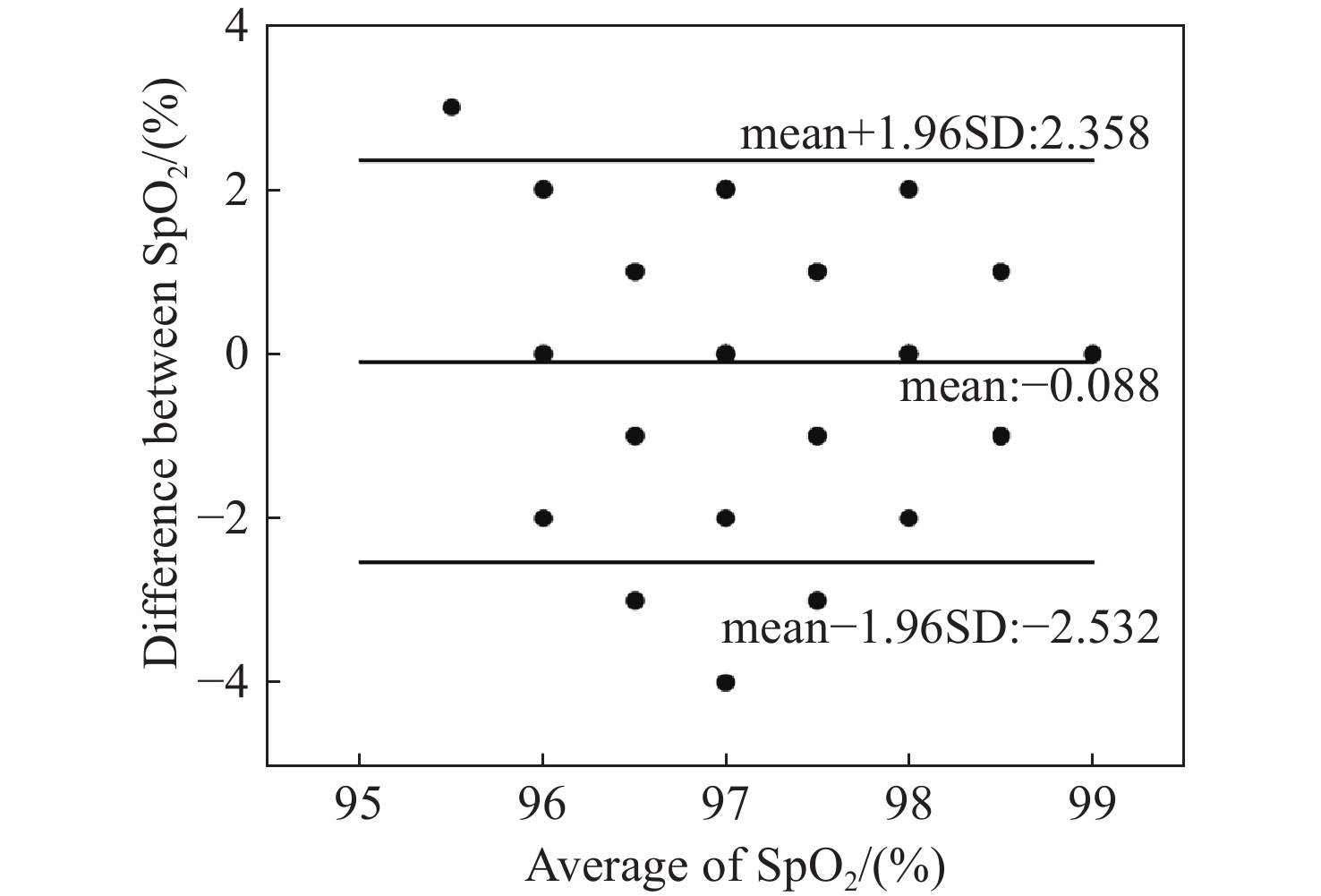
针对现有非接触式血氧饱和度测量方法在头部动态场景下准确性低的问题,提出一种基于改进的自适应噪声完全集合经验模态分解与小波阈值相结合的去噪方法,用于提取高信噪比的脉搏波信号。首先,为解决自适应噪声完全经验模态分解在分解重构早期产生虚假分量和模态混叠的问题,在分解过程中加入高斯白噪声,使其成为改进的自适应噪声完全集合经验模态分解(ICEEMDAN),从而减少模态分量中的残余噪声。然后,使用ICEEMDAN对红蓝色通道的脉搏波信号进行模态分解,并使用db8小波基函数对符合血氧频谱范围的分量进行3级分解和重构,将重构后的信号用于后续血氧值的计算。最后,将不同头部动态场景下测量的血氧饱和度结果进行实验对比分析。结果表明:不同头部场景下得到的血氧饱和度平均误差为0.73%,相较于其他算法平均误差降低1.93%。本文提出的去噪方法在不同头部场景下具有较好的稳定性,可满足日常血氧饱和度测量的需求。

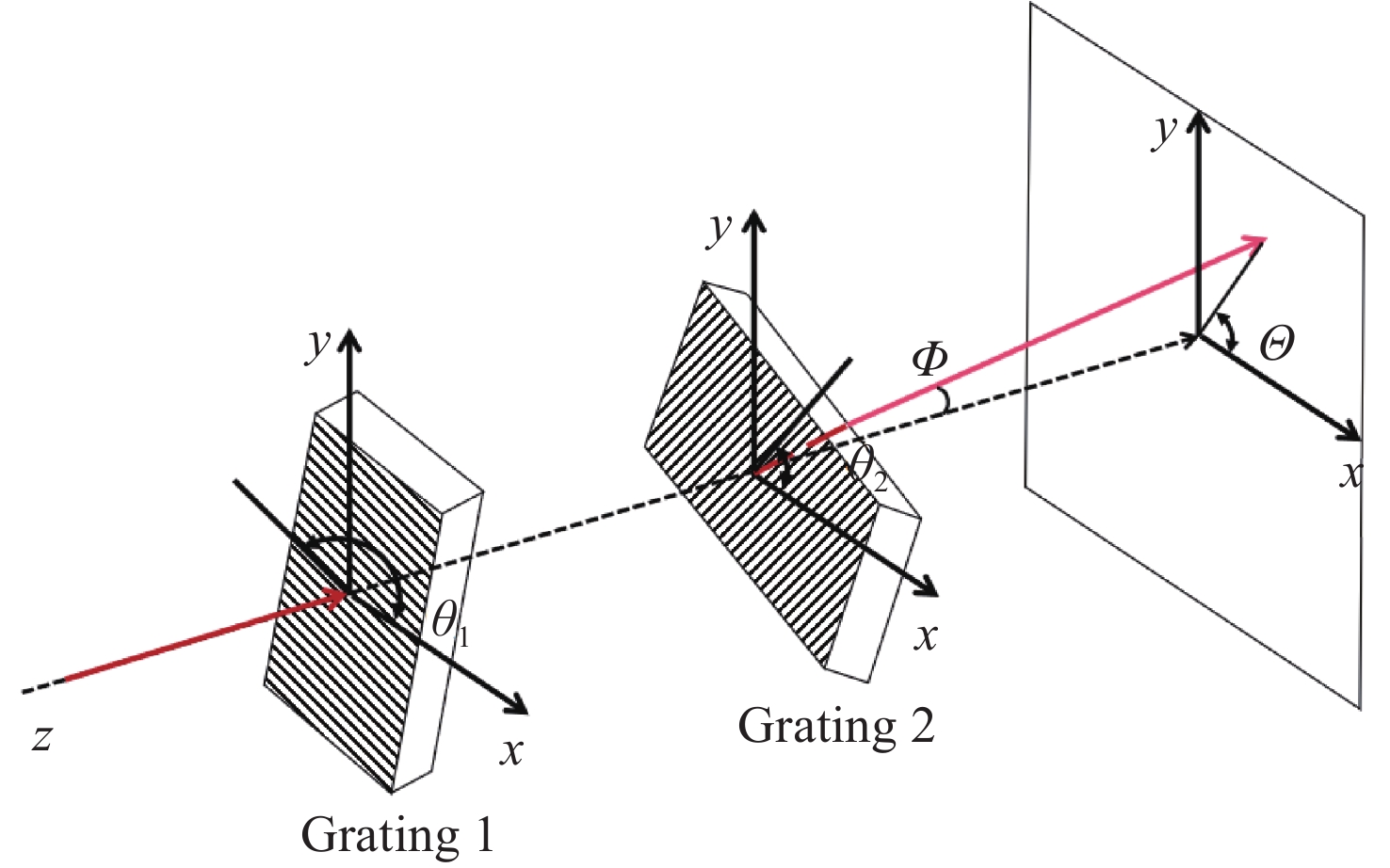
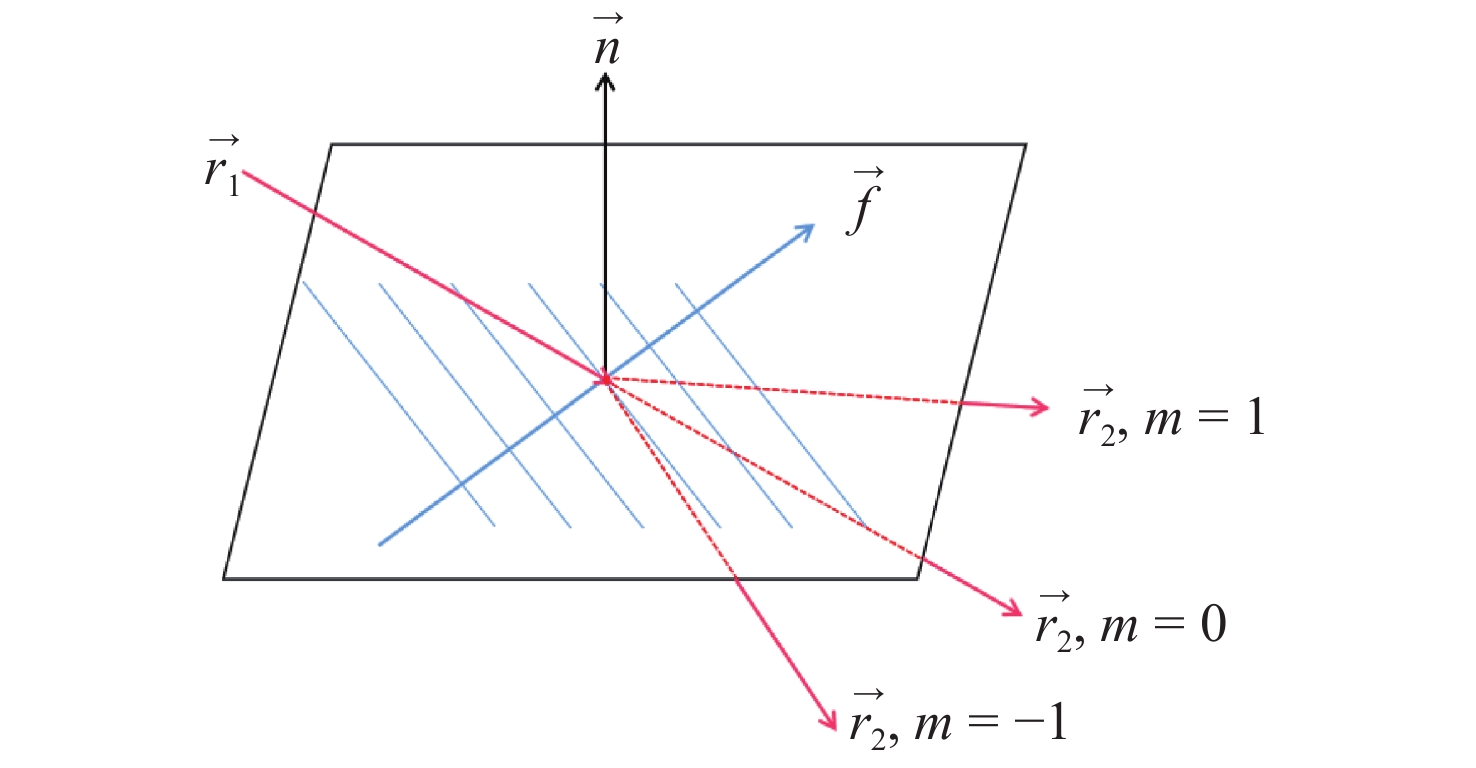
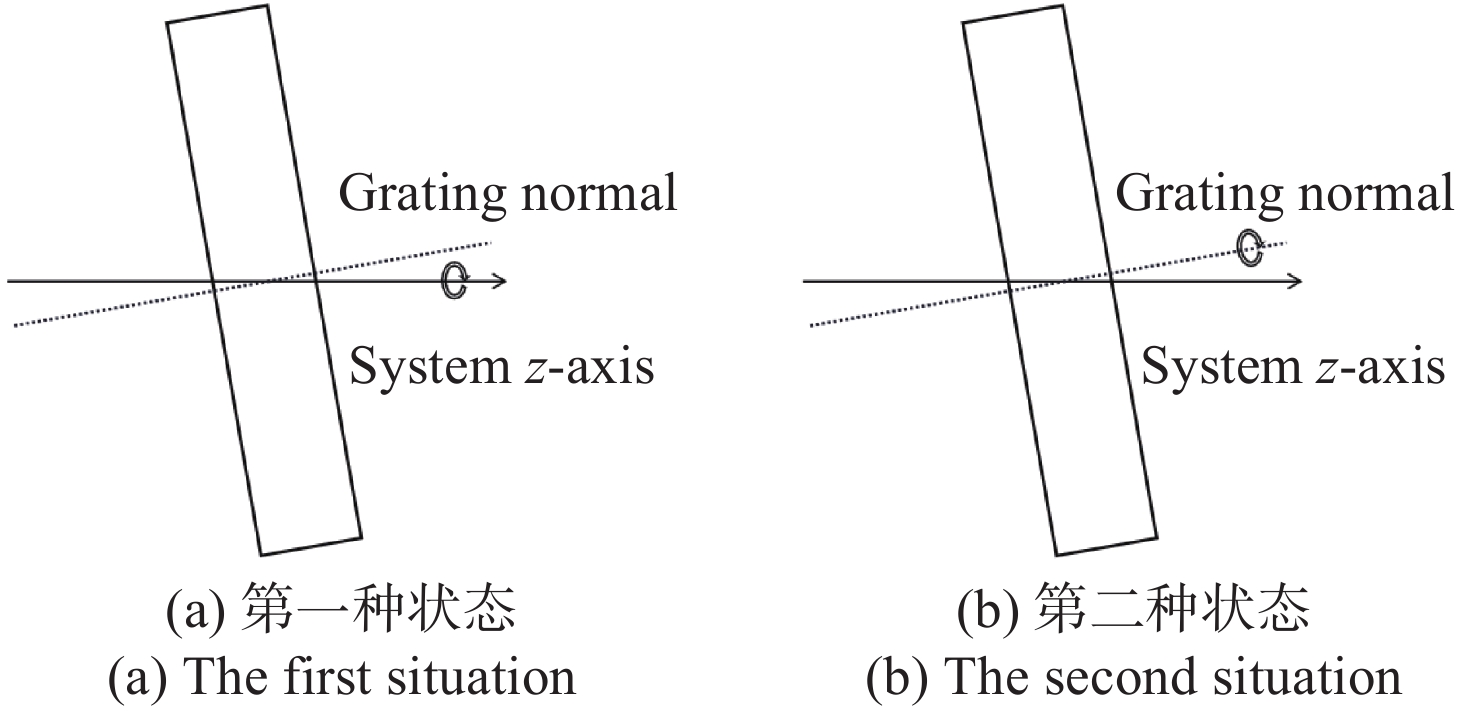
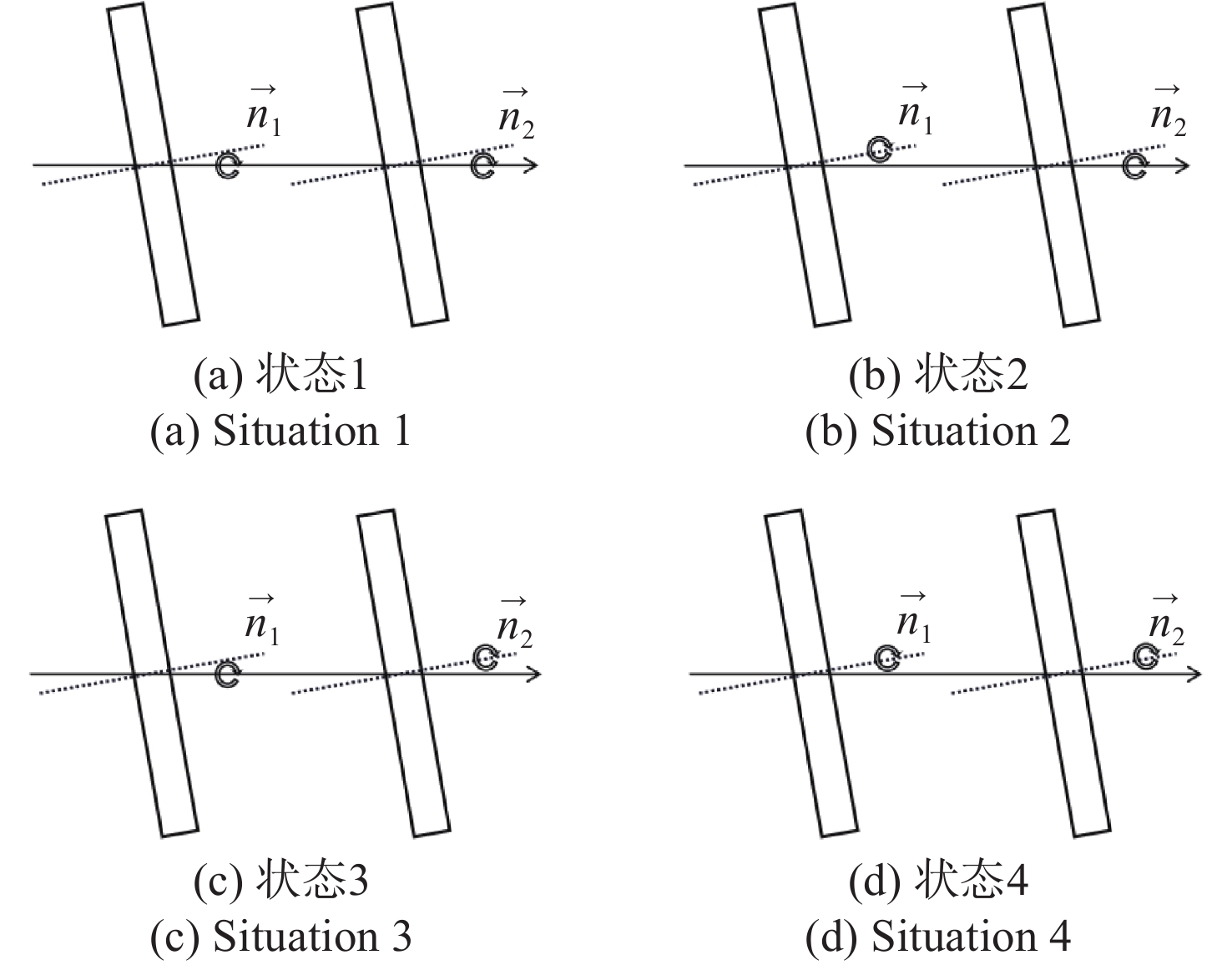
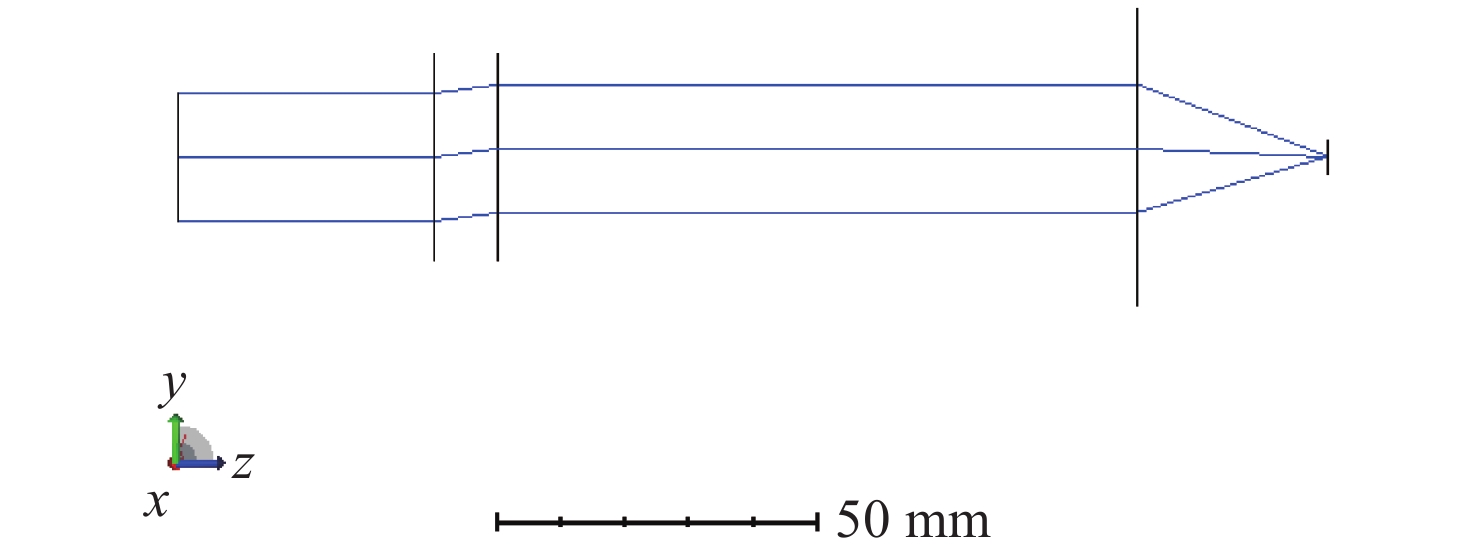
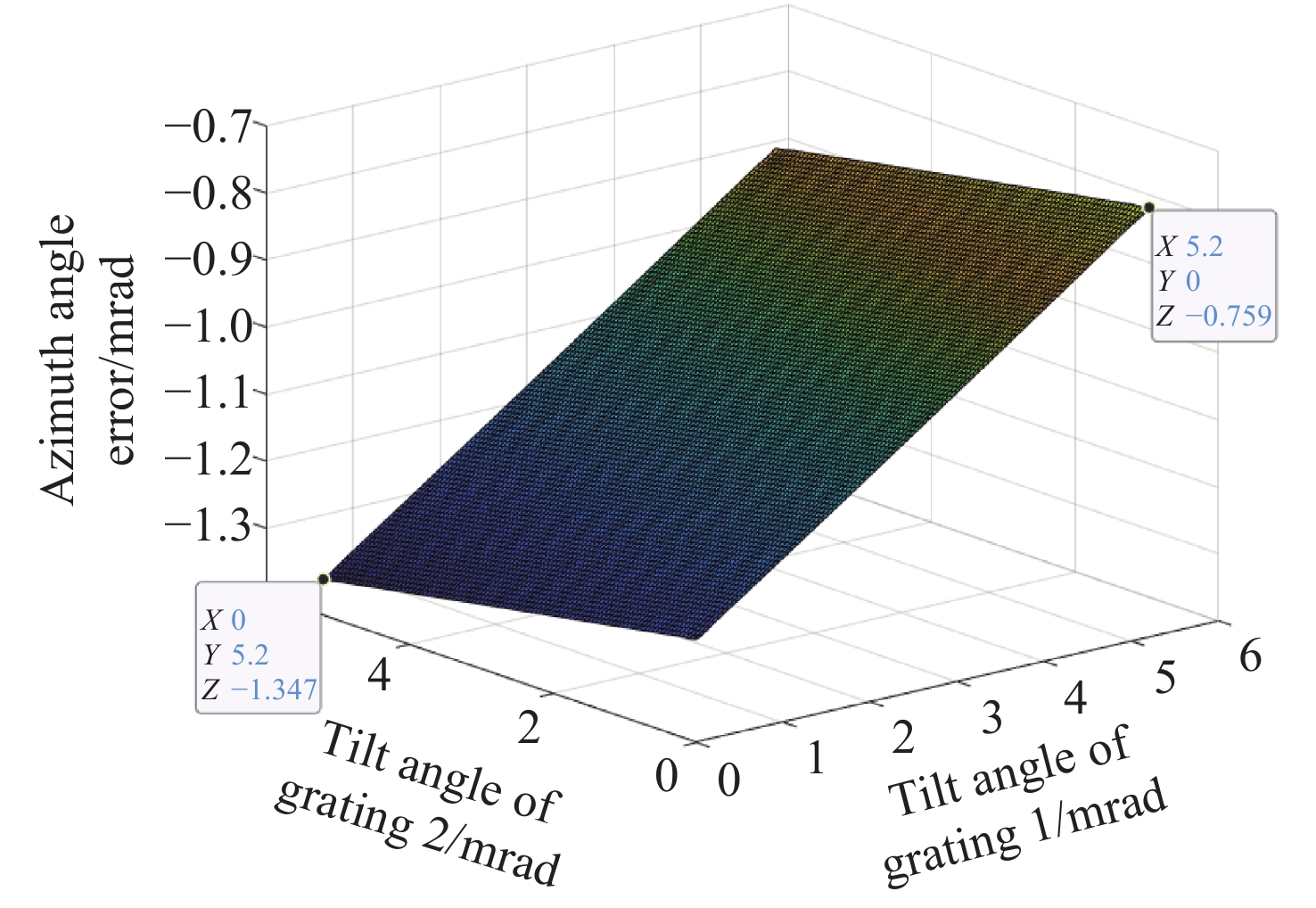
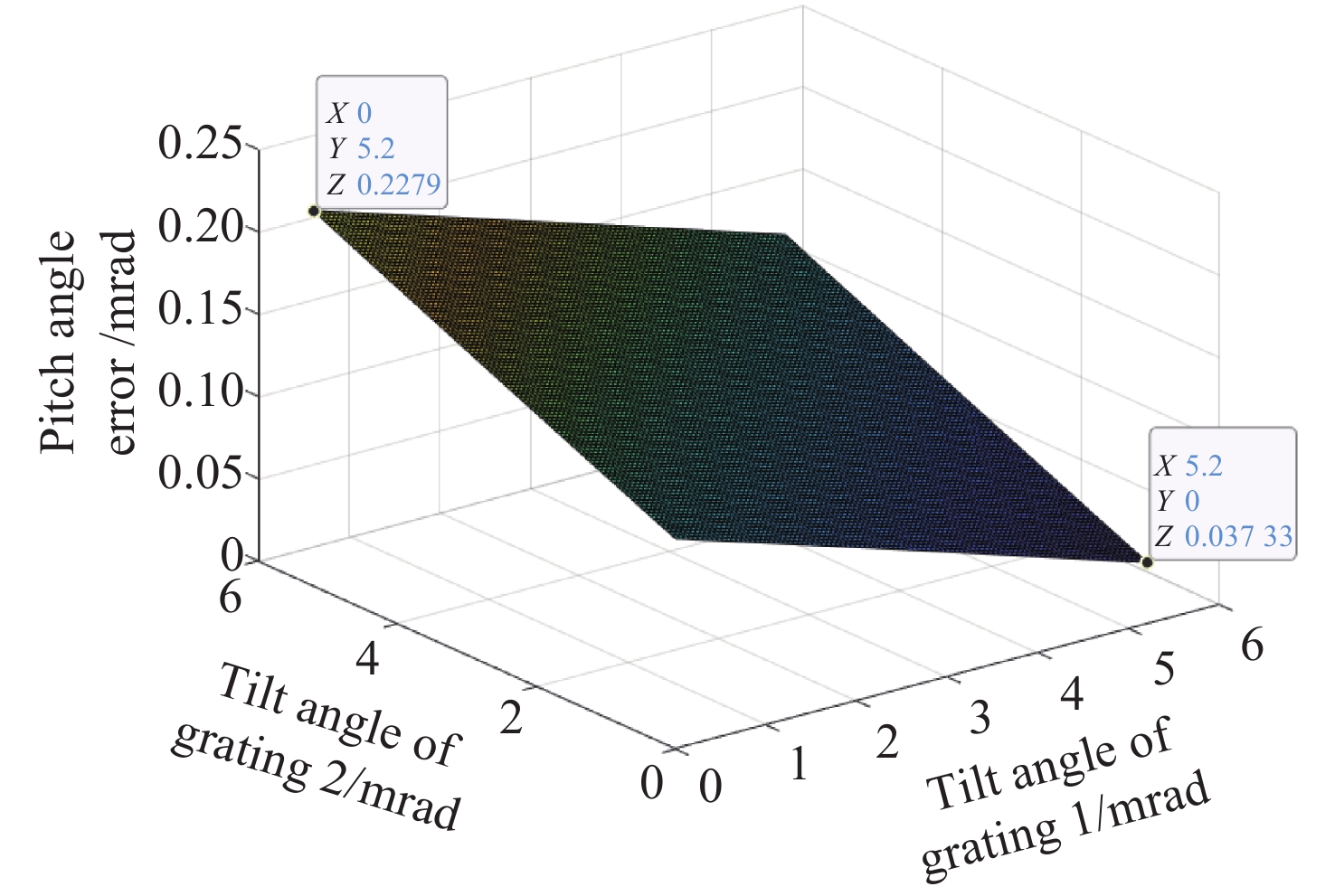
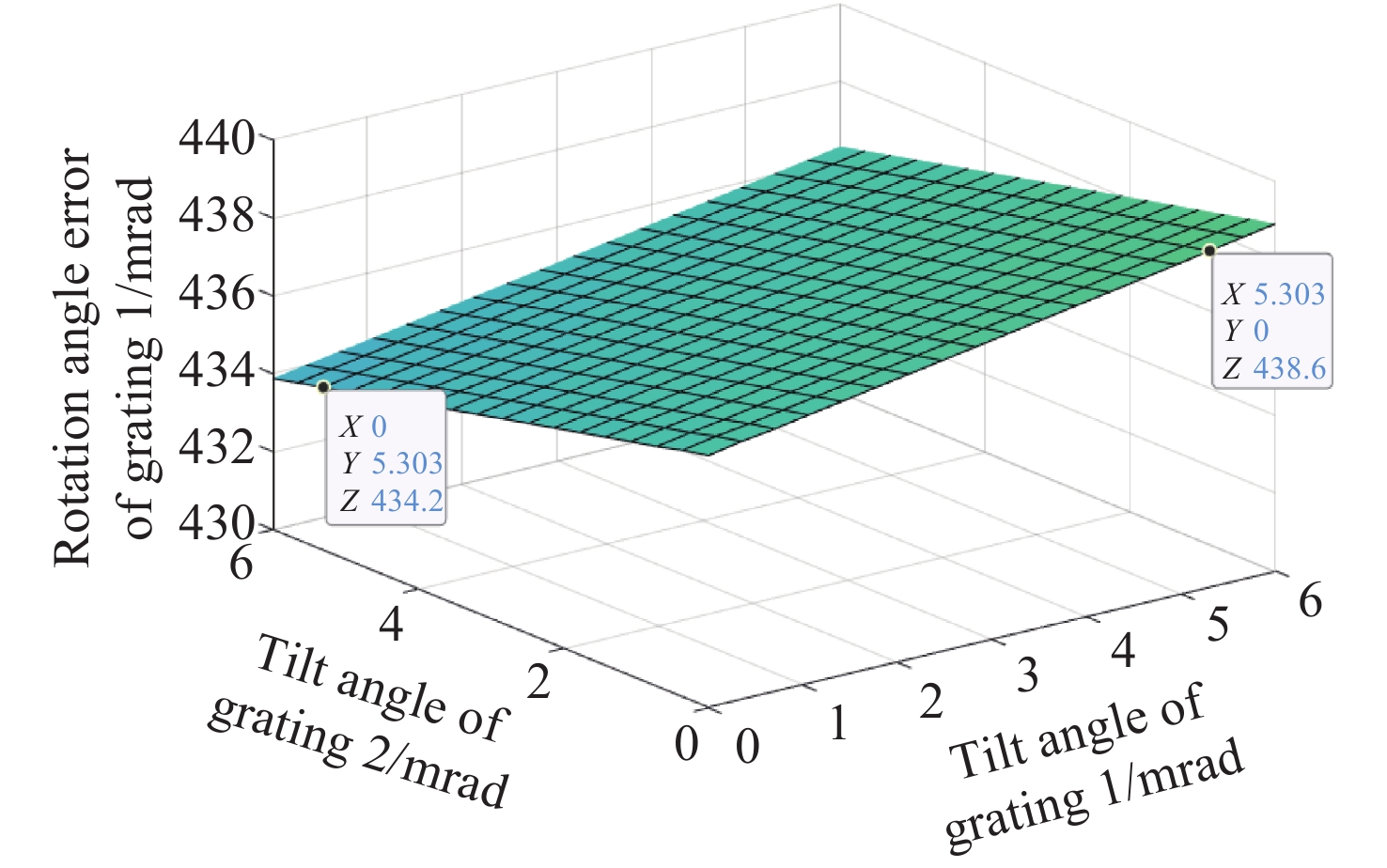
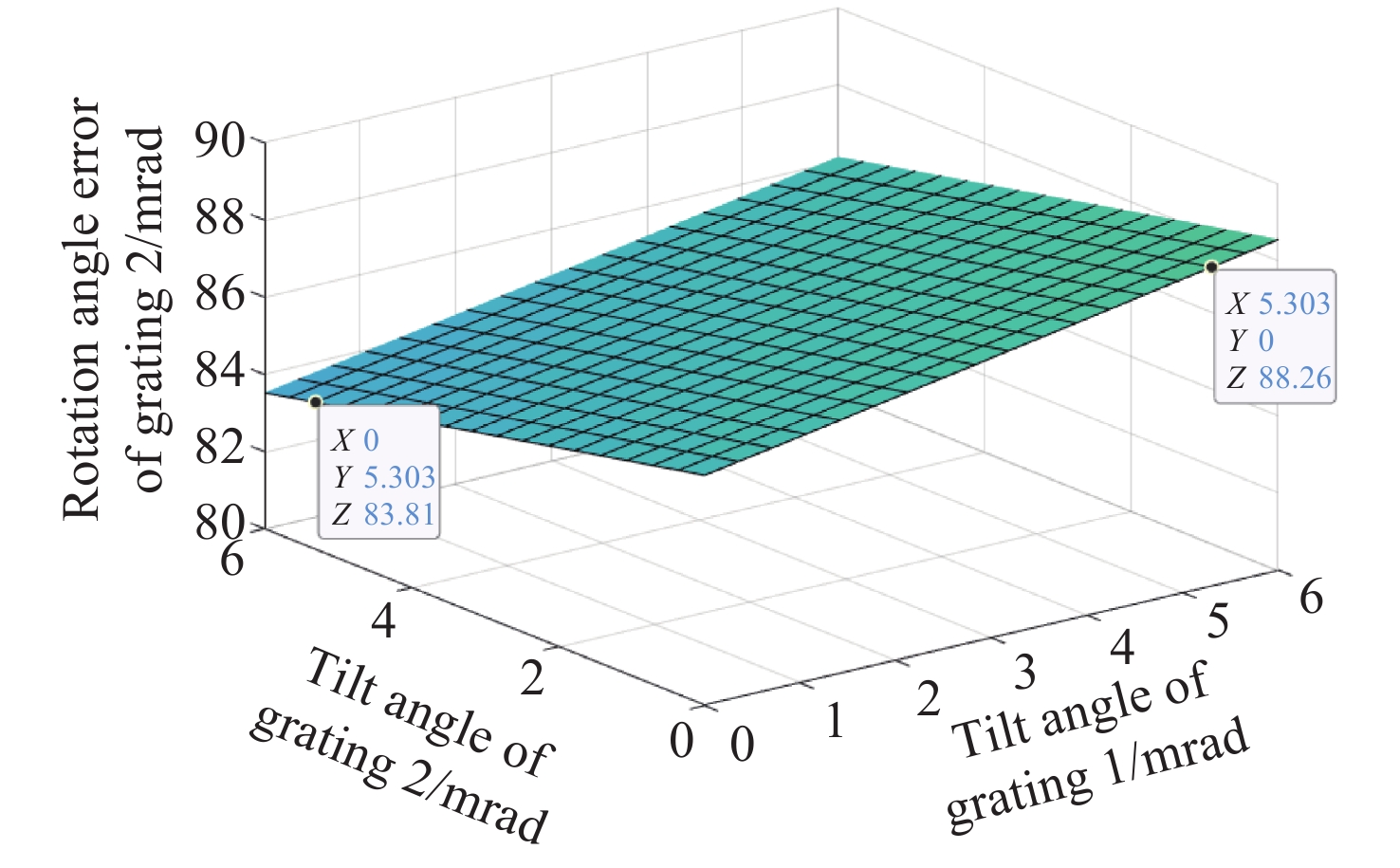
为了精确控制激光光束指向,本文基于双液晶偏振光栅系统的光束指向算法,分析了系统中因光栅倾斜产生的误差。首先,采用一种基于衍射光栅方程的光线追迹方法求解出射光束指向,引入了入射光束指向和光栅倾斜角,通过与仿真结果进行对比,验证了该方法的正确性和精度。其次,通过对光栅不同倾斜情况的分析,本文给出了不同倾斜情况下光栅姿态的表达式,并结合光线追迹法得到了相应的出射光束指向表达式,并进一步分析了光栅倾斜产生的调零误差和旋转误差。研究结果表明,在0°~0.3°光栅倾斜角范围内,调零误差分别在0.25 mrad和2 mrad以内,旋转误差分别在85 mrad和430 mrad左右。本文方法可实现对双液晶偏振光栅系统中出射光束指向和光栅倾斜误差的精确计算。
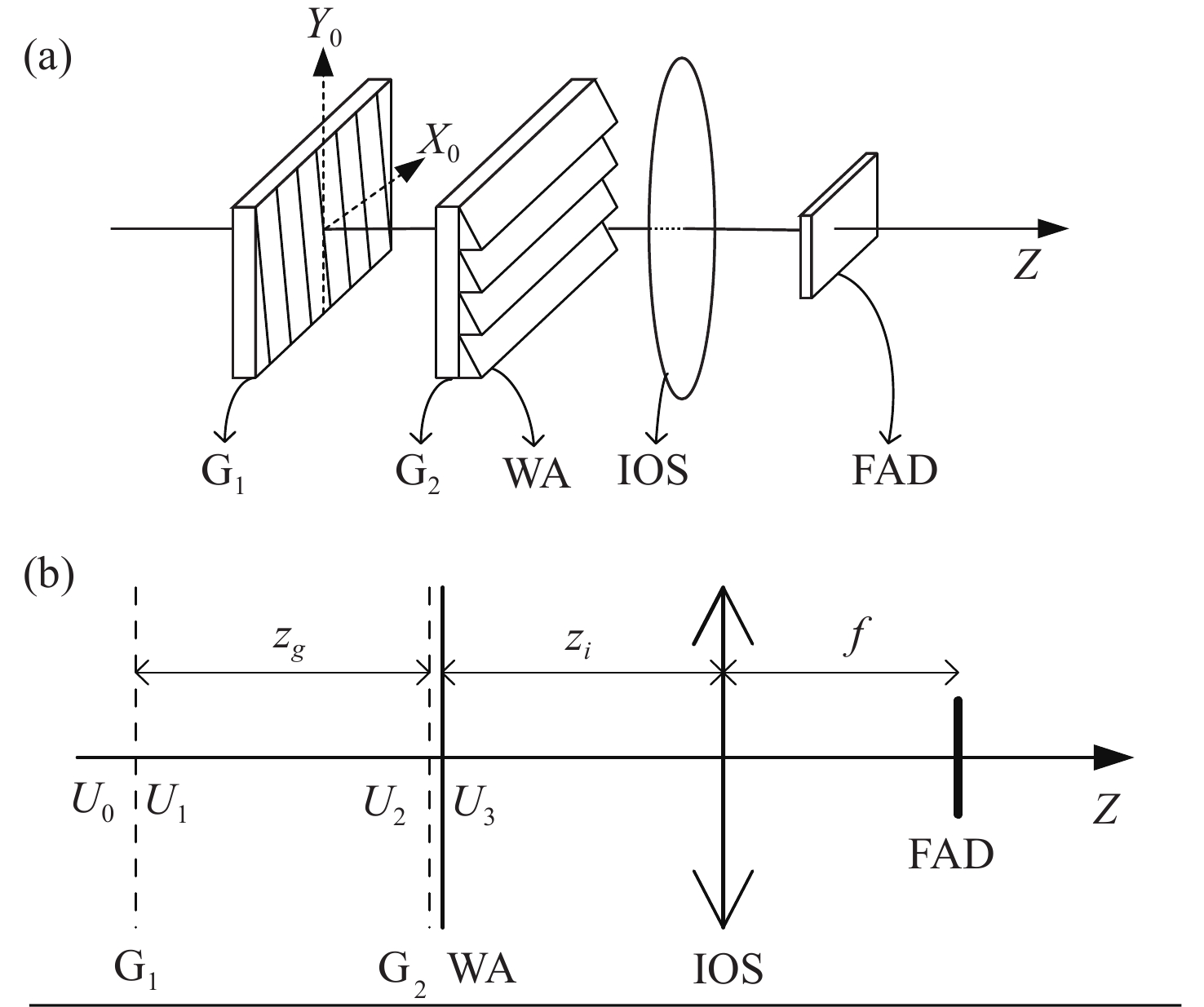
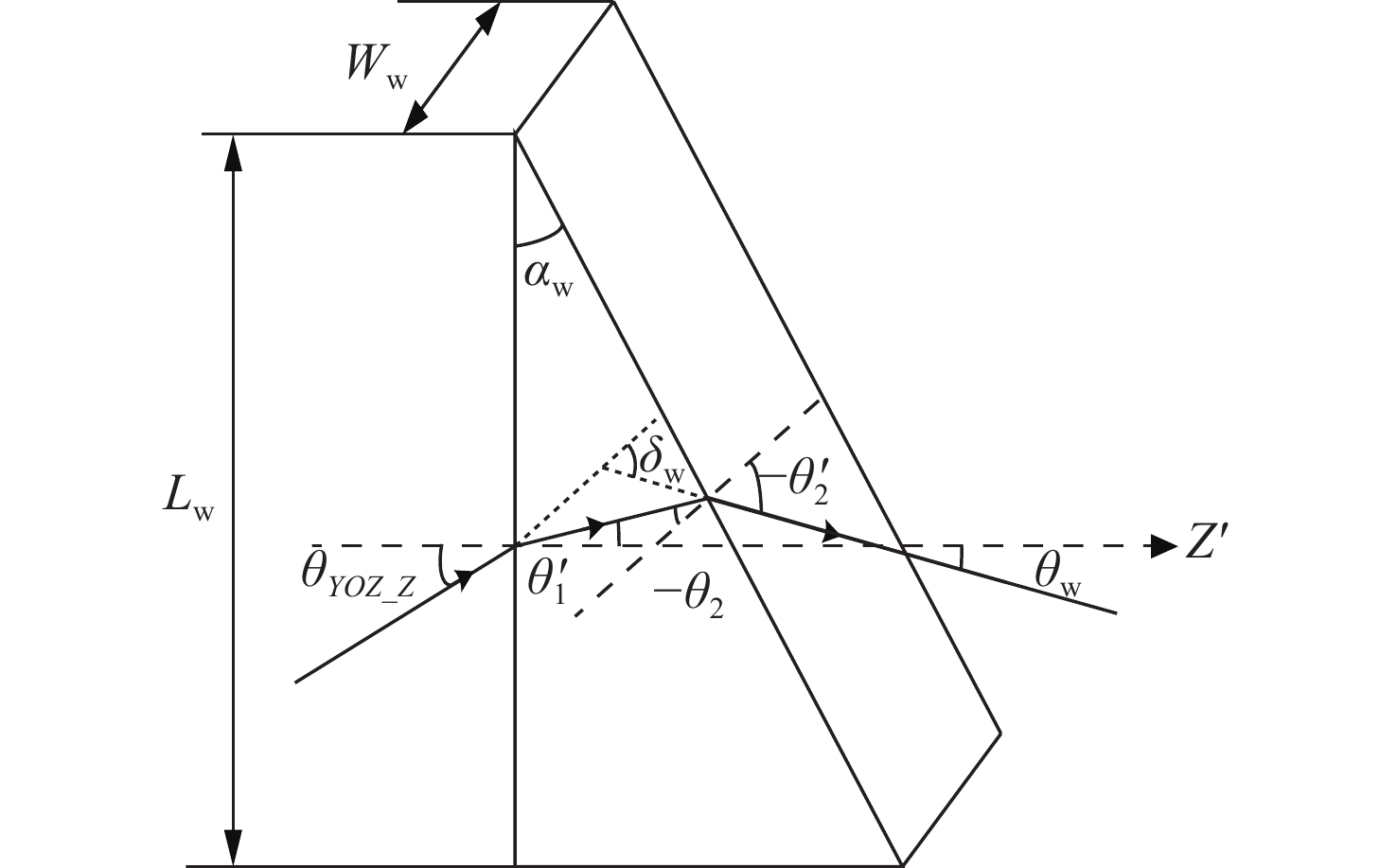
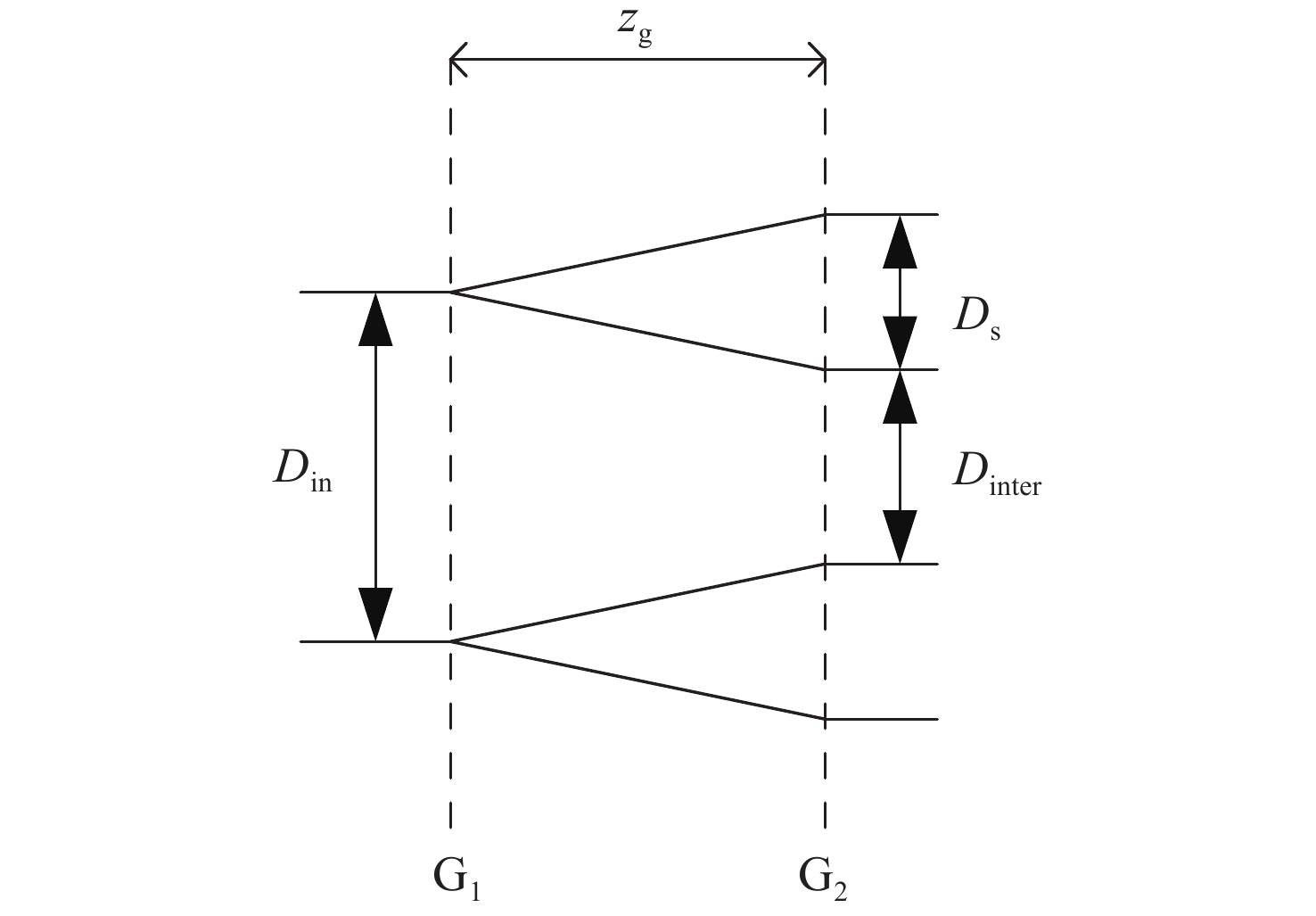
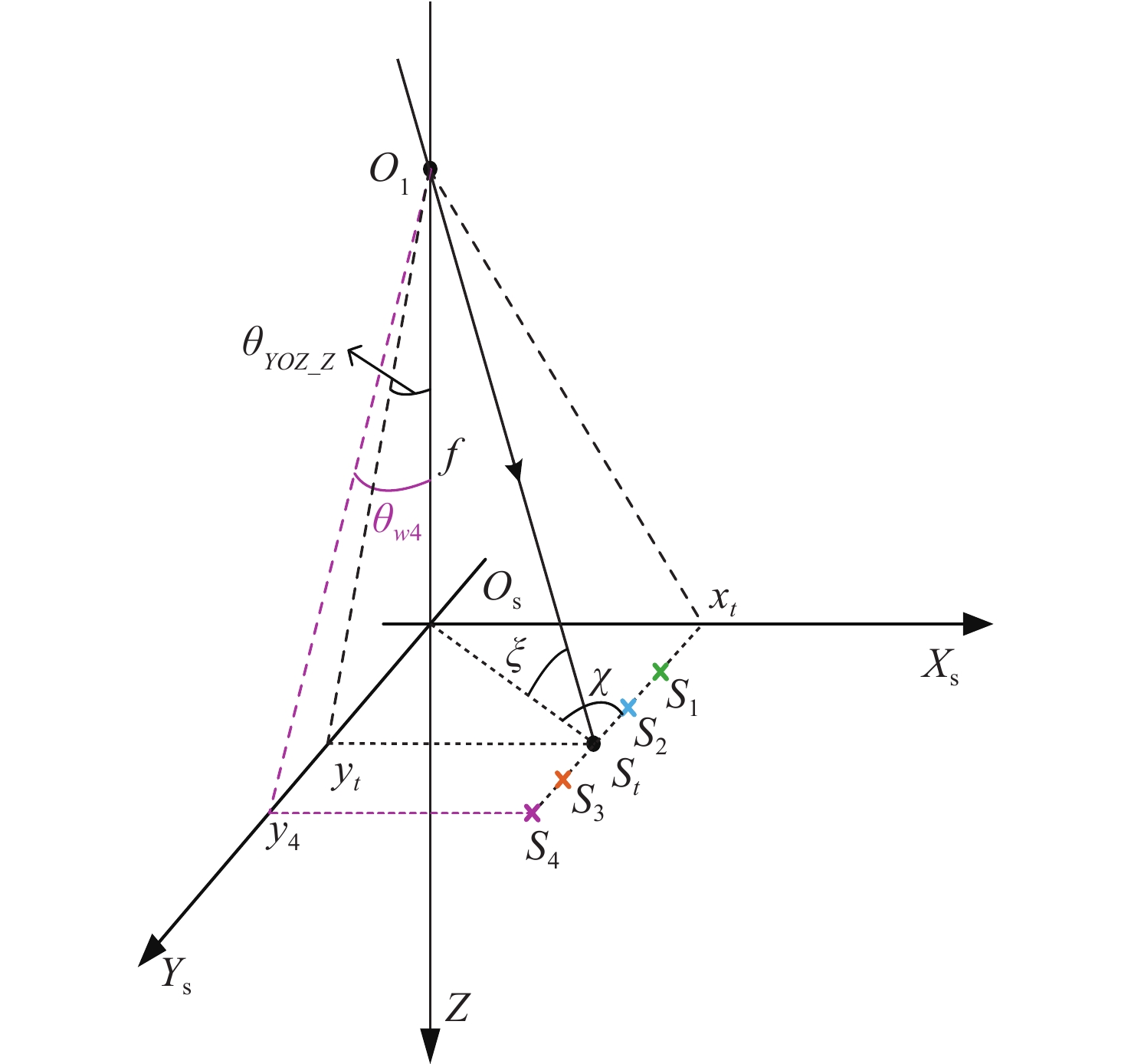
基于干涉条纹成像的测角系统测量精度随着测量范围的增大而下降,单纯提高精定位的细分倍数并不能提高测量精度。针对这一问题,本文围绕非成像系统的参数设计方法及大测量范围下的精度变化情况展开研究。建立了双光栅干涉系统及光楔阵列波前分割的数学模型,给出了近轴条件下非成像光学系统的参数设计方法。设计了一台一维高精度光学测角系统,并对该系统在整个测角范围内的测量误差进行了分析和计算。结果显示:利用本文提出的数学模型和方法,所设计的测角系统在[−5°,5°]的测量范围内,近轴区的测角分辨率为0.02″。随着测量范围的增大,干涉条纹相位非线性变化引起的精定位误差成为系统测角误差的主要来源,最大测量角度下精密轴的测量误差为0.42″。上述结果表明采用本文提出的模型和参数设计方法,可以设计出具有较高测角精度的光学测角系统。
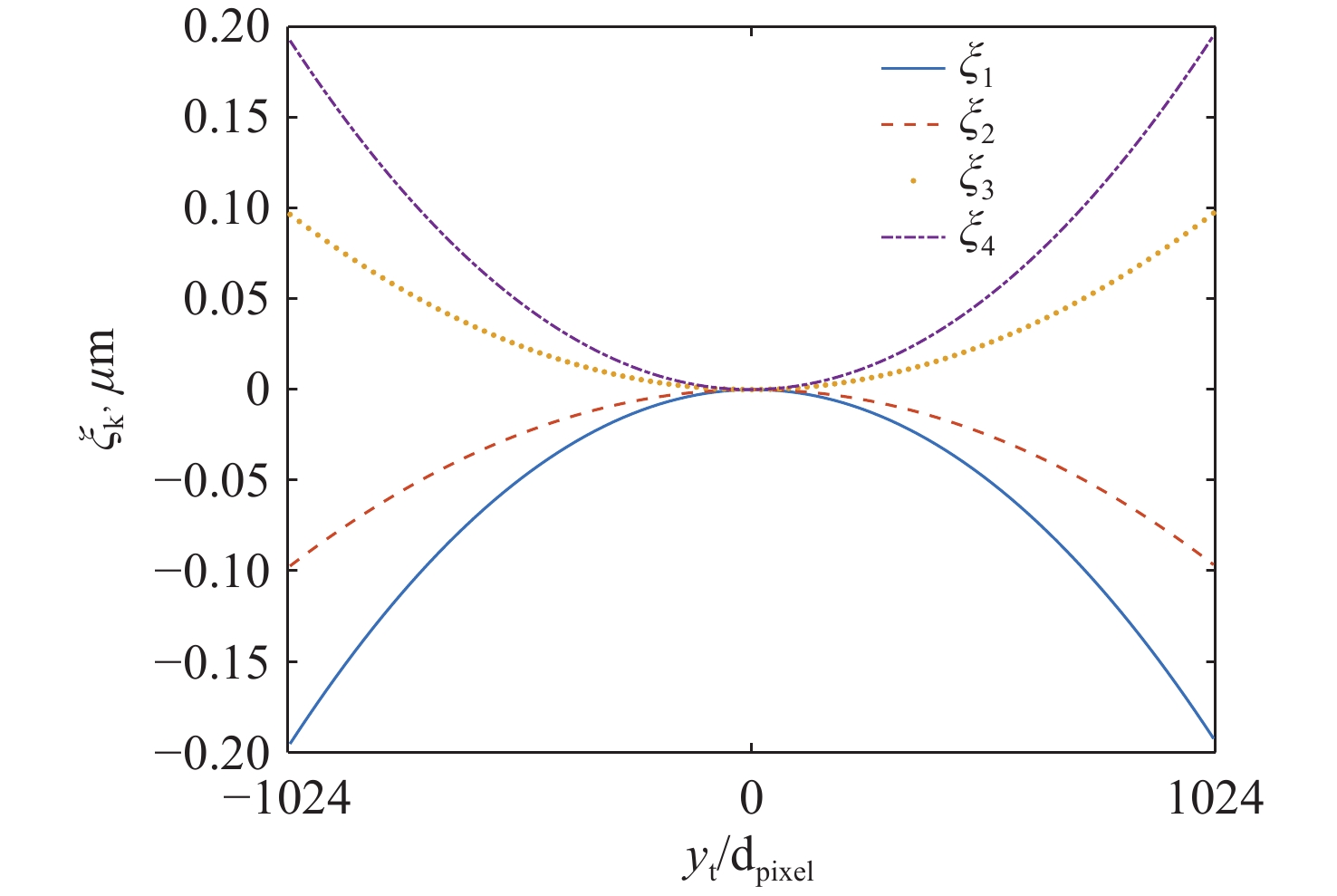

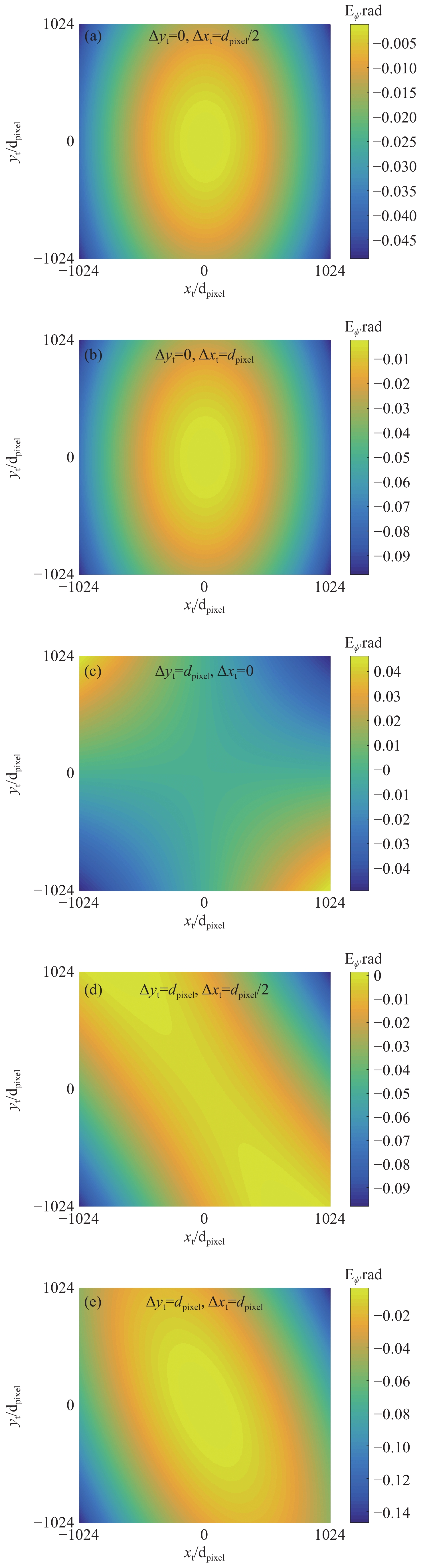
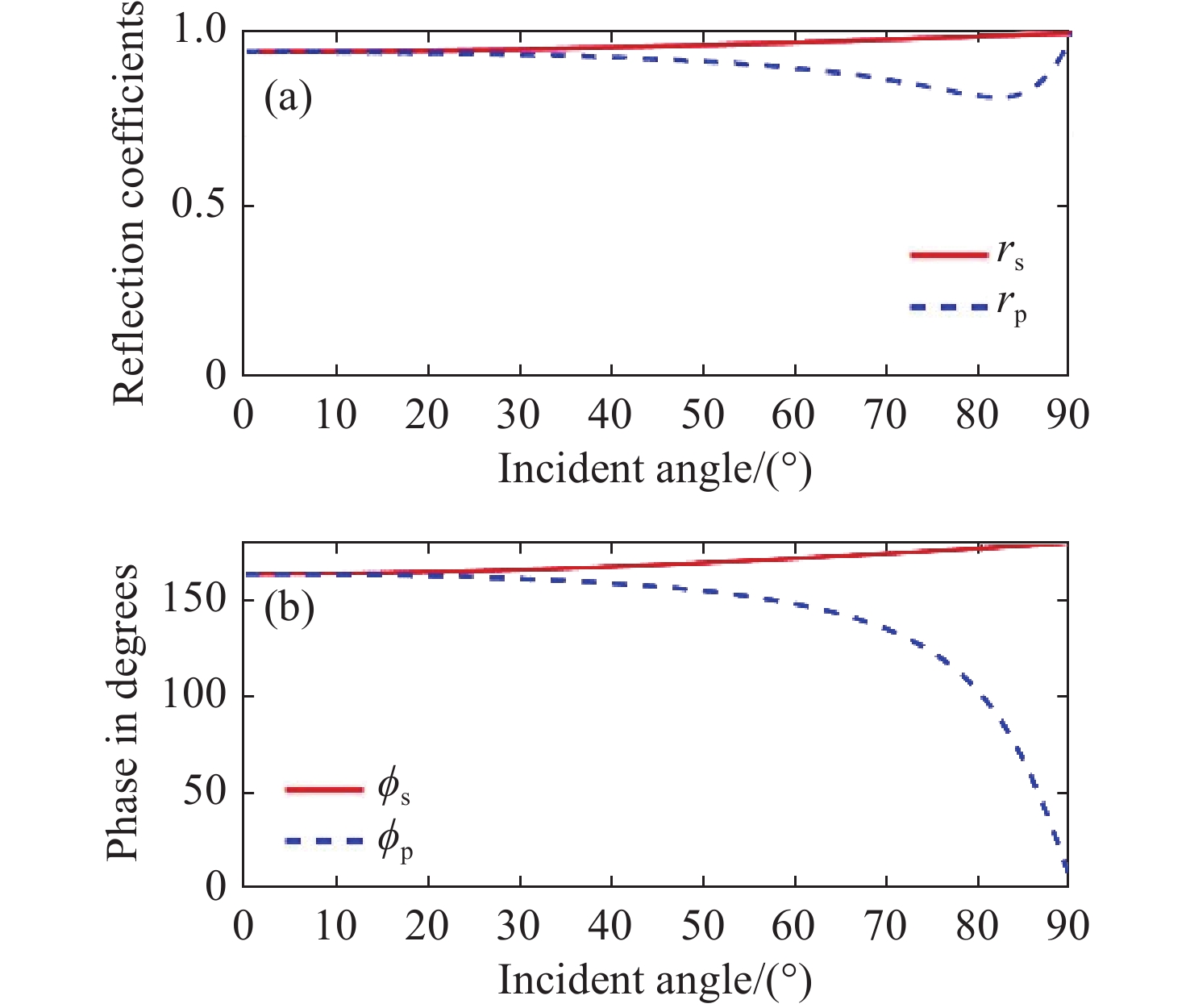
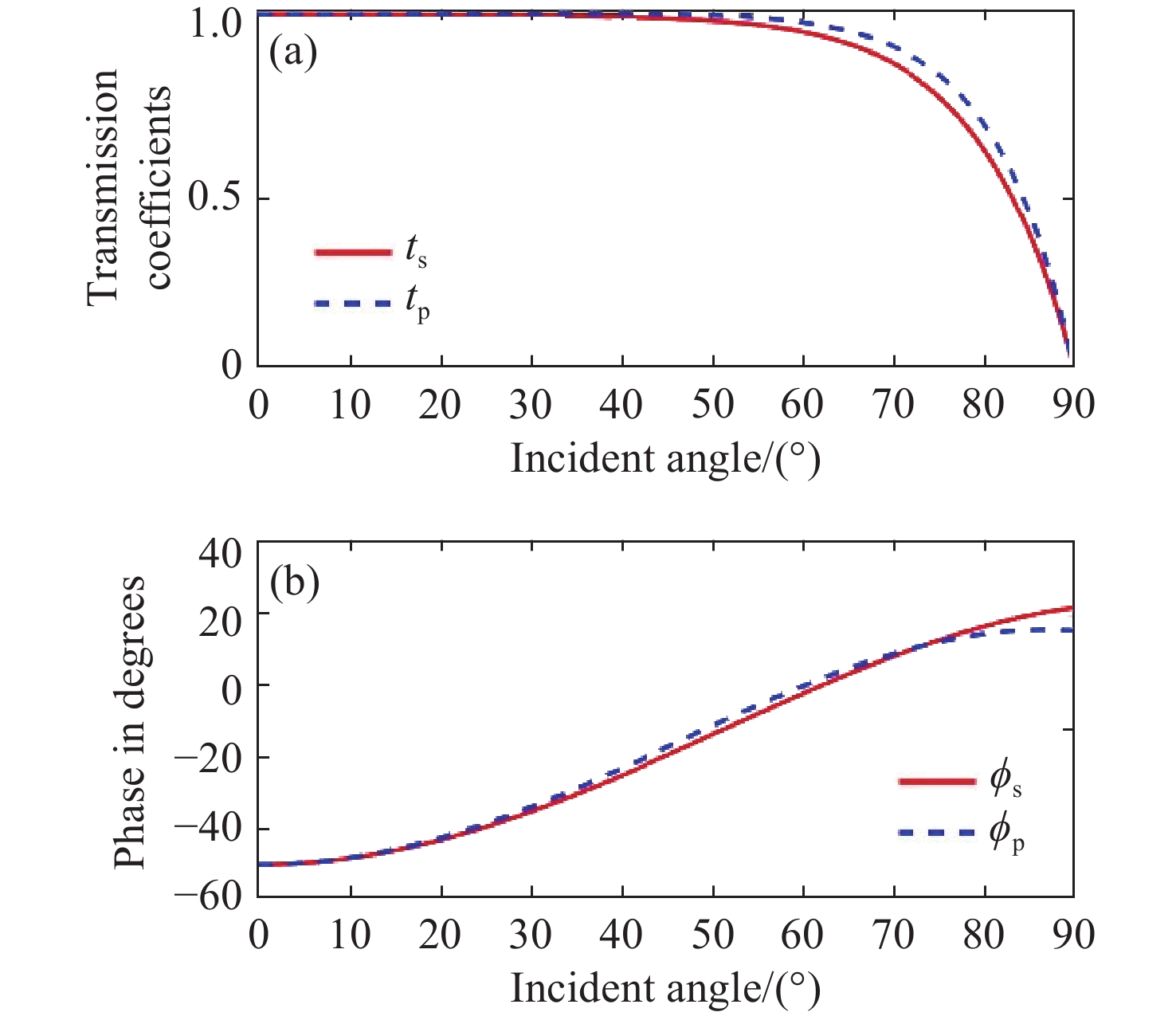
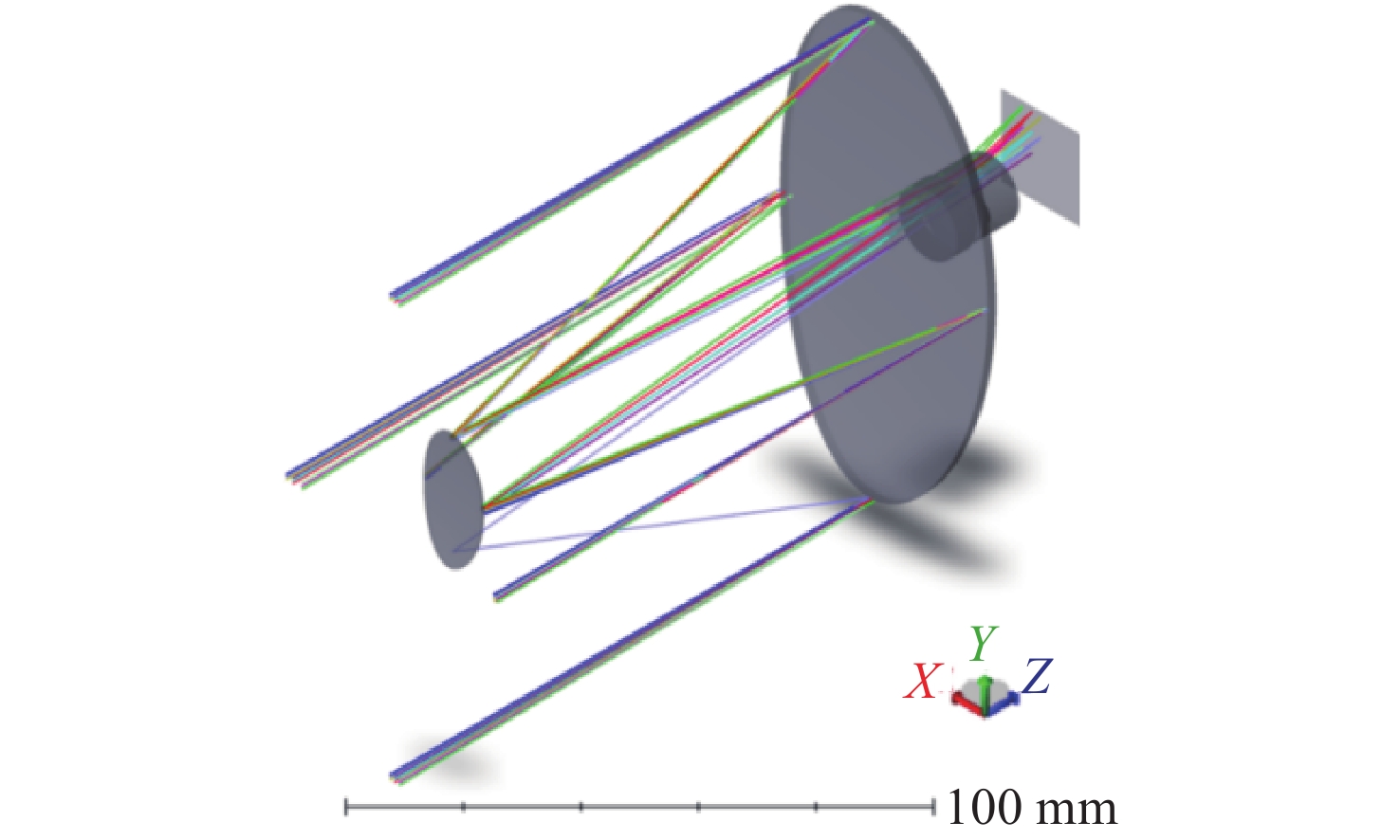
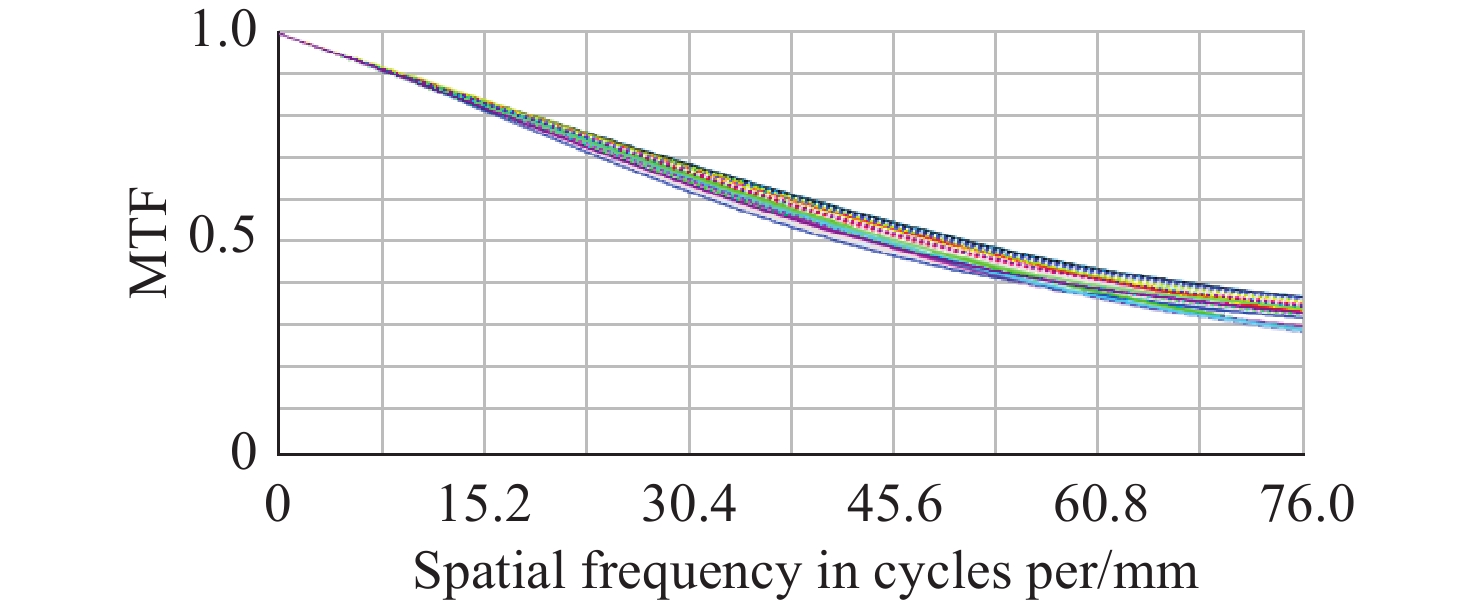
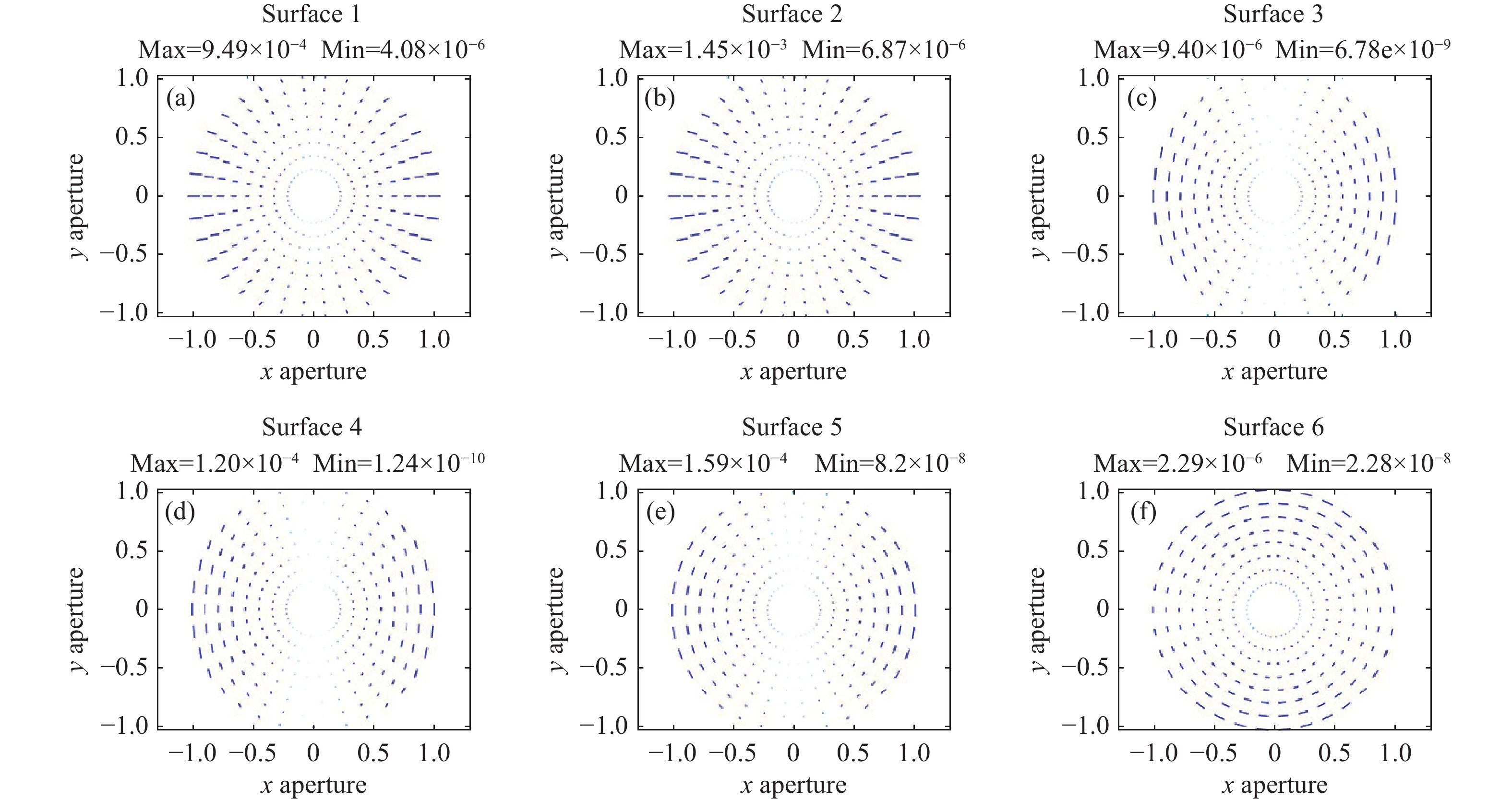
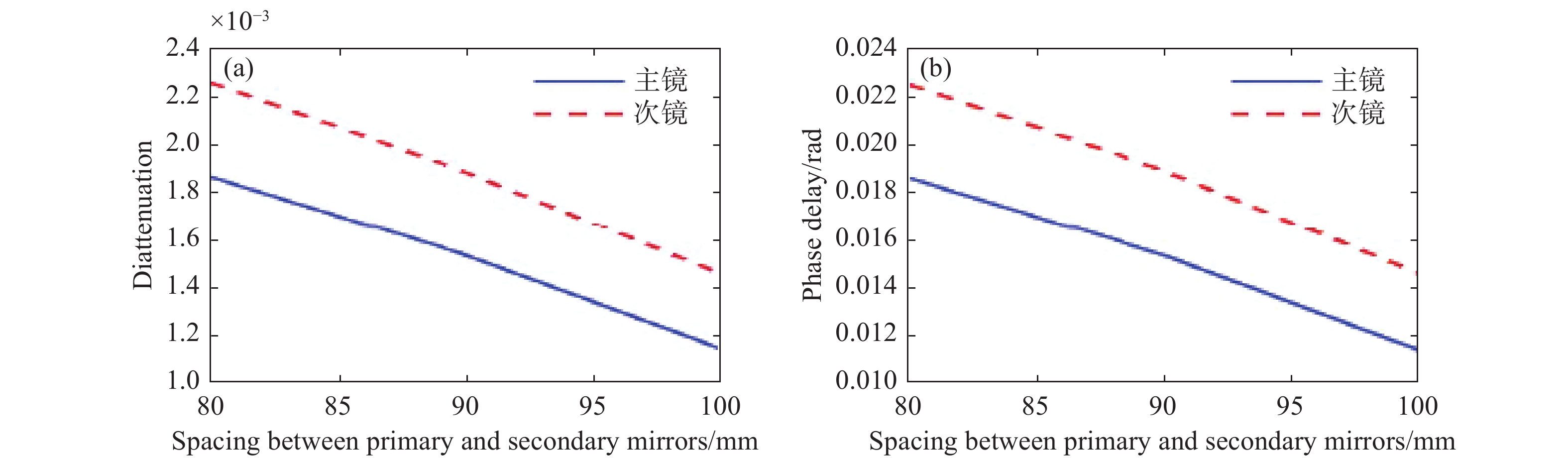
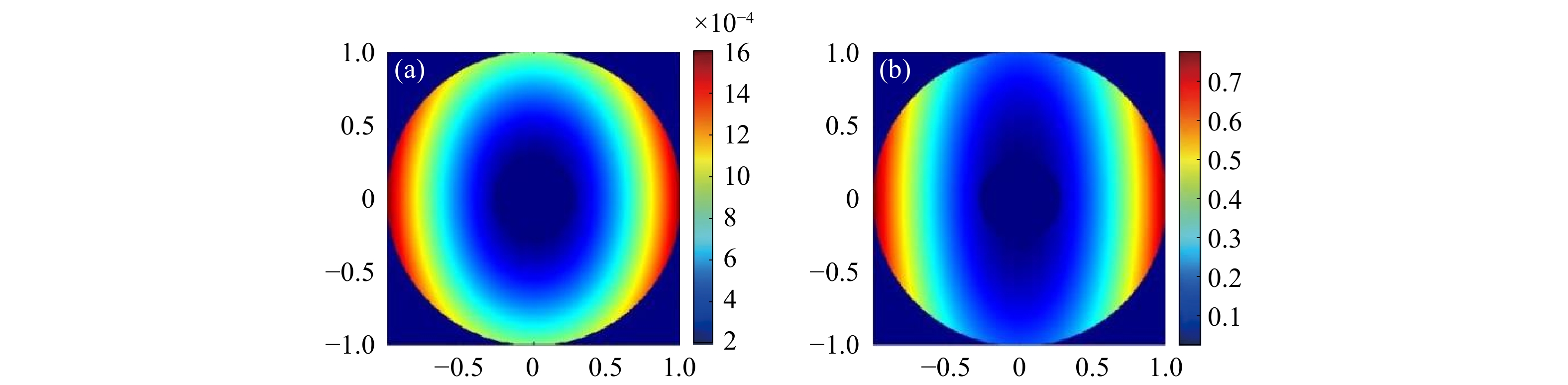
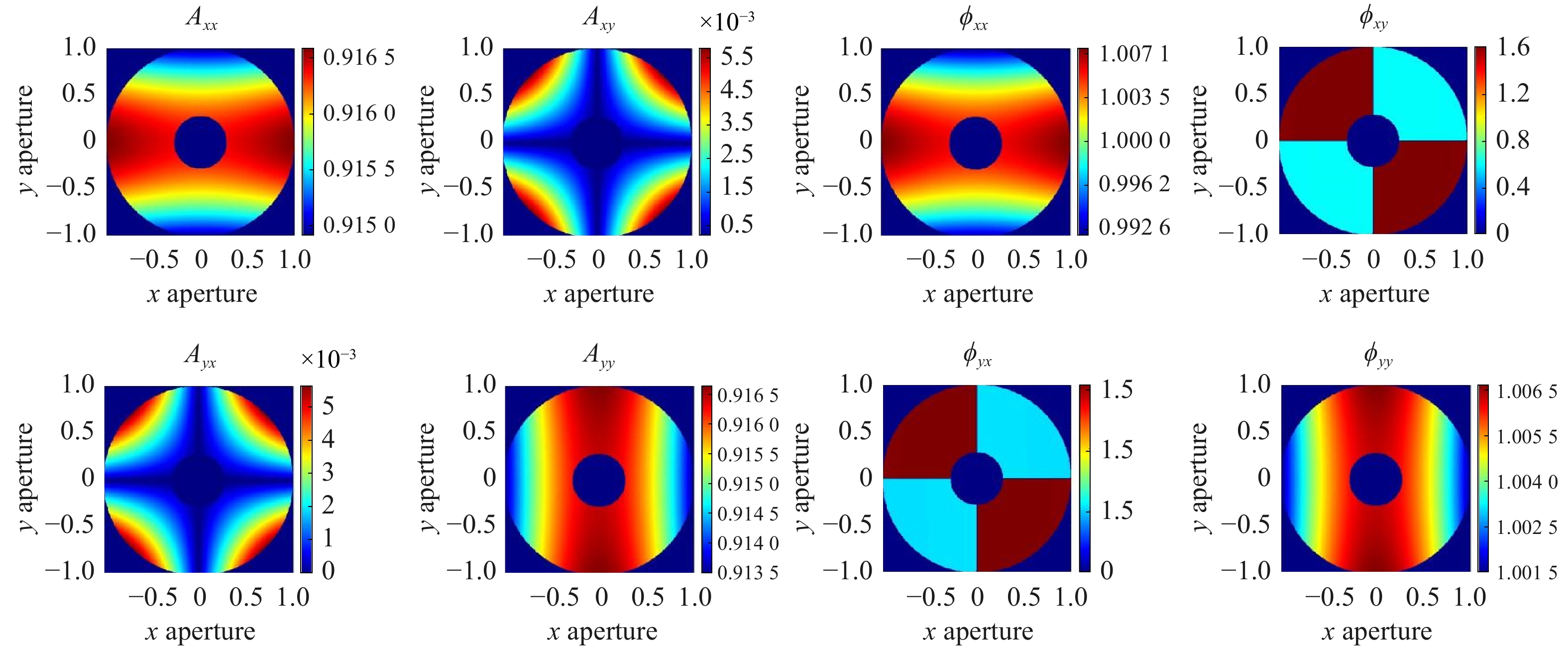
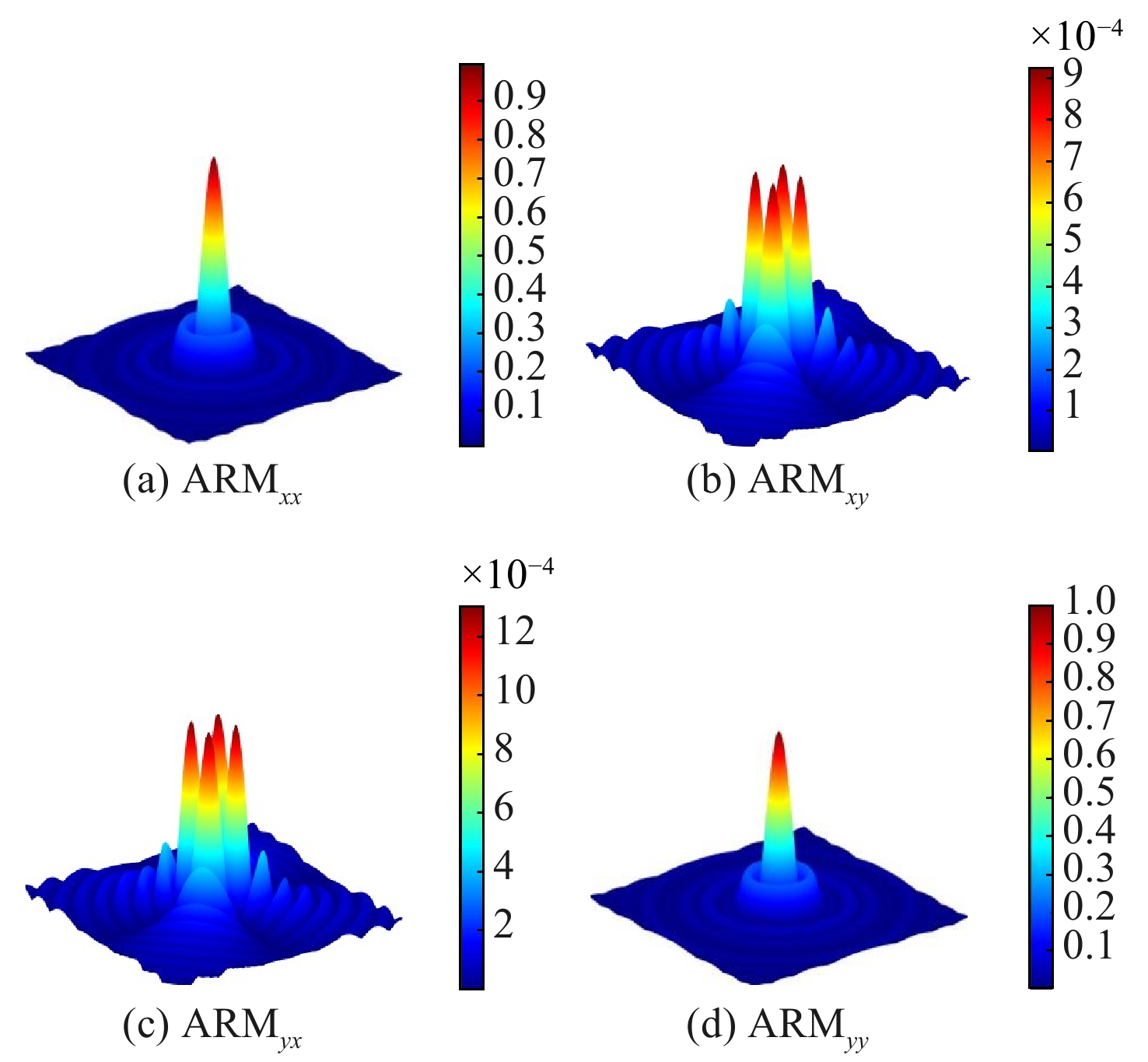
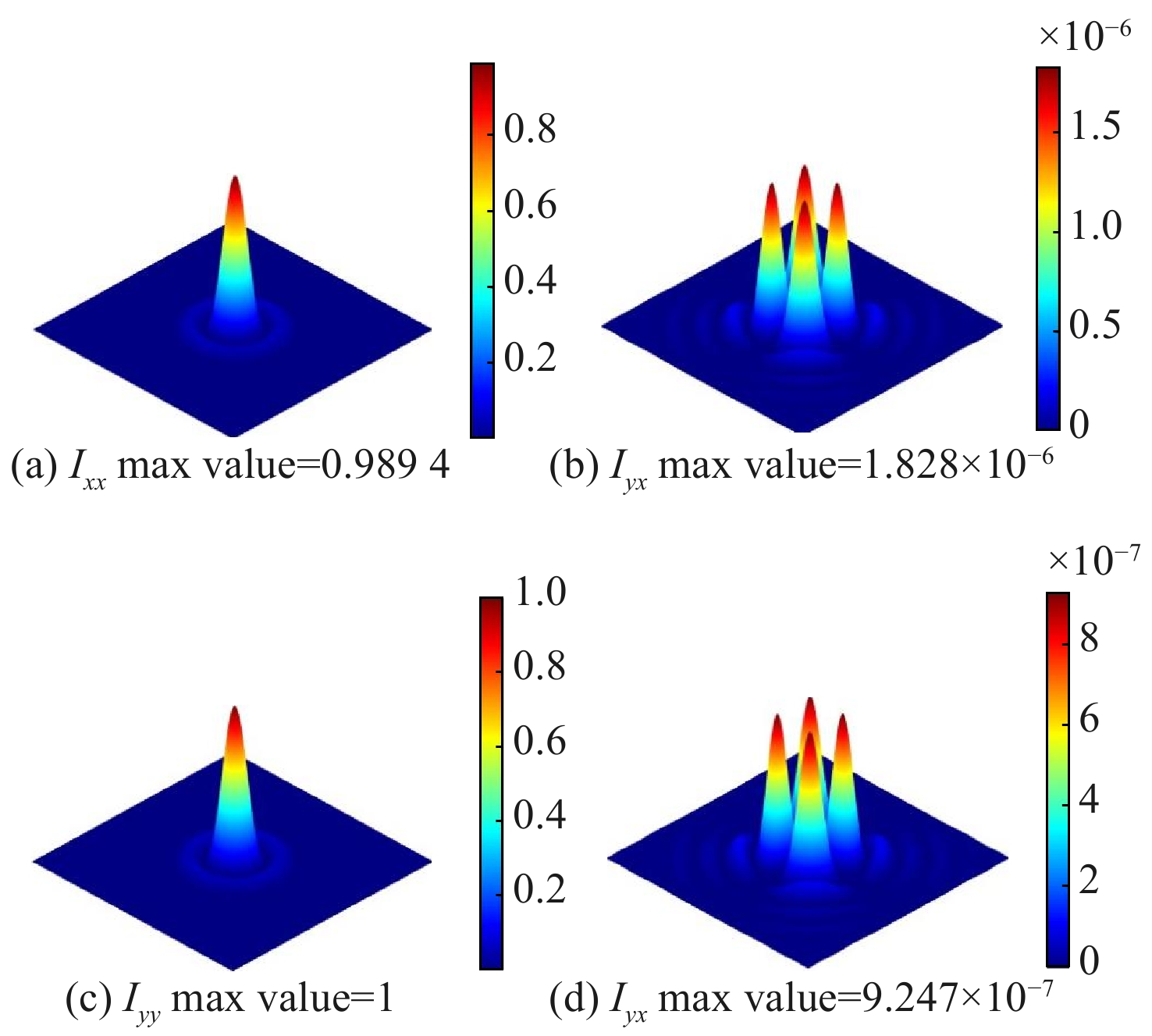
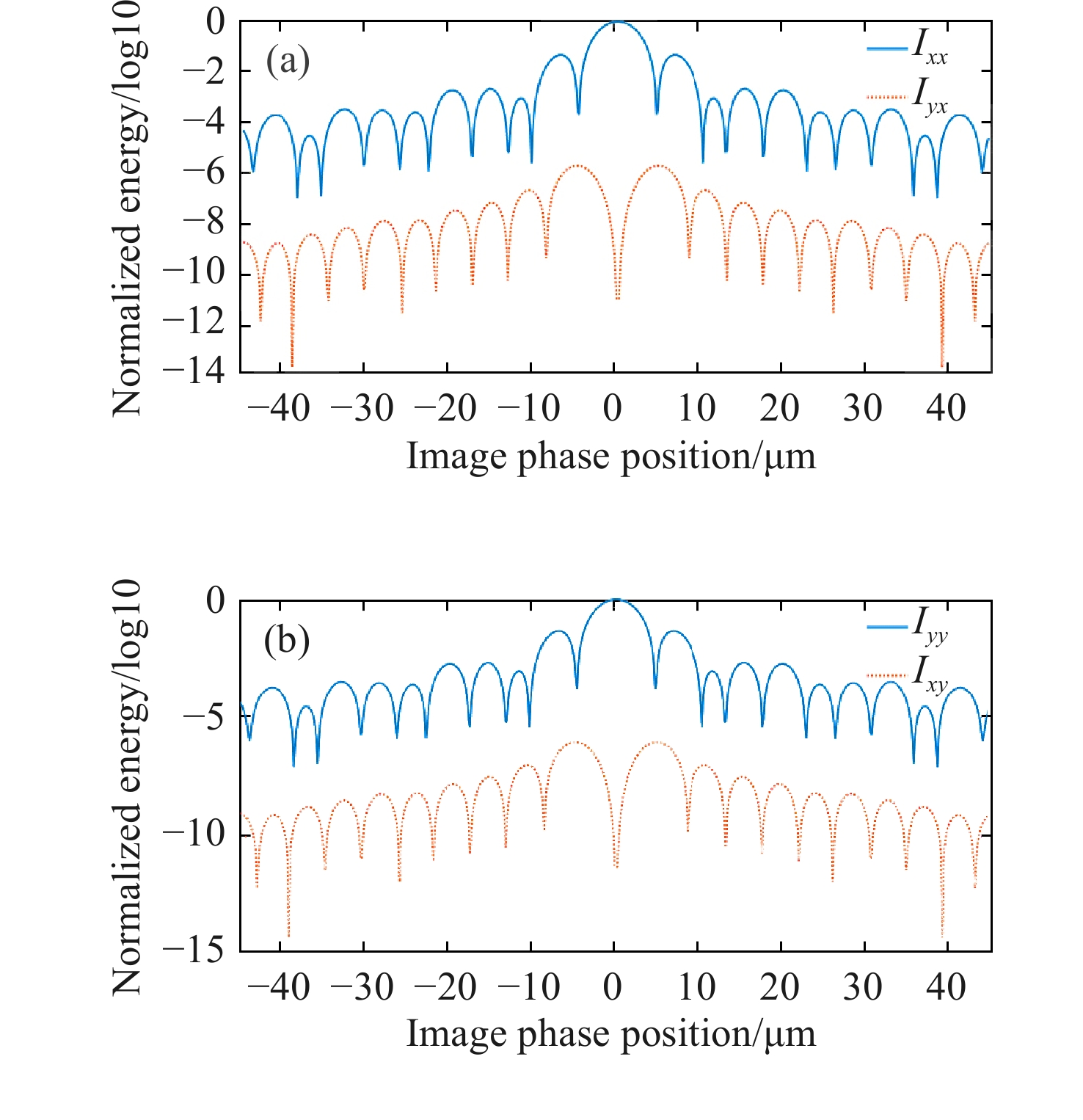
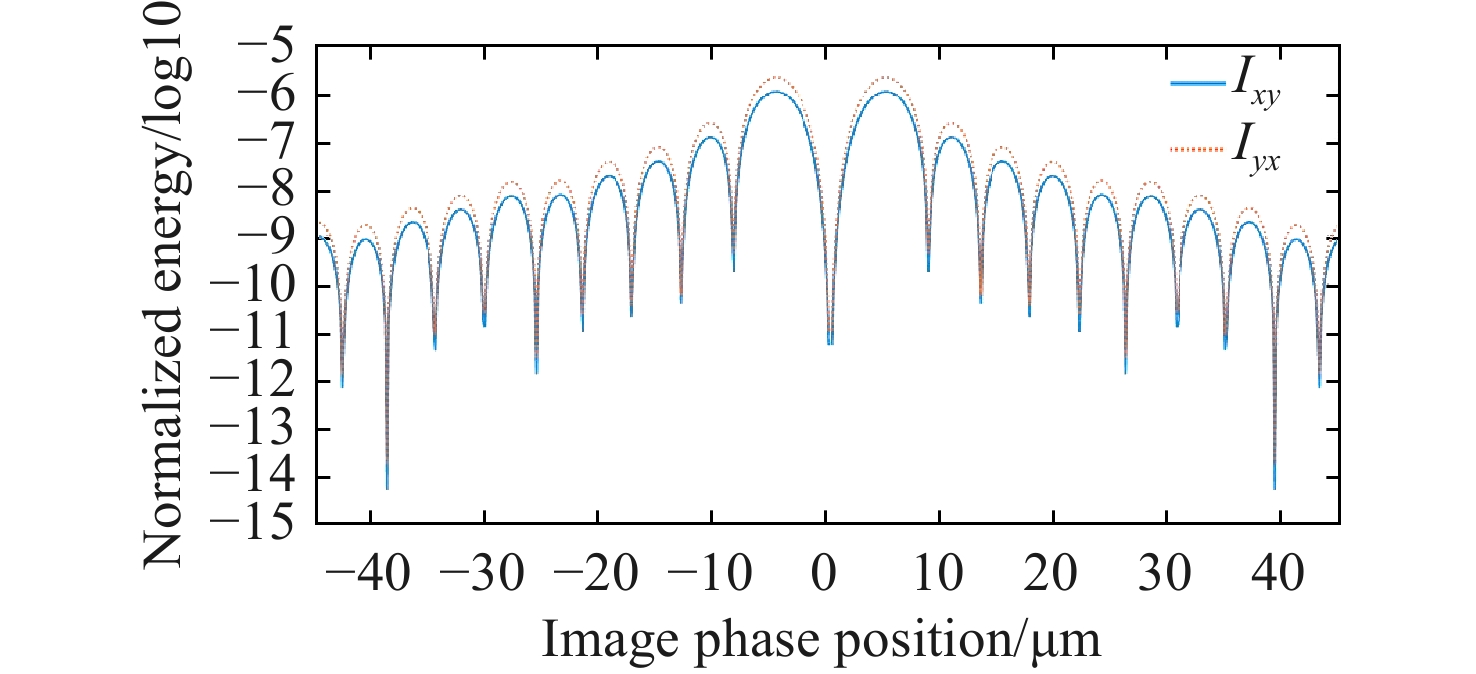
变形光学系统是一种具有双平面对称性的相对特殊的光学系统,其结构会引入非旋转对称的偏振像差。针对这一问题,本文构建一个折反式变形光学系统,并对该系统的偏振像差及其对点扩散函数的影响进行系统分析。基于三维偏振光线追迹对折反式变形光学系统进行仿真计算,获得偏振像差的详细数据,并计算各个表面的二向衰减、相位延迟分布特性以及系统的琼斯瞳、振幅响应矩阵、点扩散函数和偏振串扰对比度。结果表明:最大二向衰减为0.145,最大相位延迟为1.46×10−2 rad,均出现在次镜位置。2∶1变形比的光学系统的振幅响应函数在长焦端和短焦端方向的偏振串扰项存在40.6%的差异,偏振串扰将该变形光学系统的对比度限制在10−6量级。高精度变形光学系统中的偏振像差不可忽略,可采用膜层设计和折反式结构等方法降低偏振像差影响。该研究结论可为变形光学系统在深空探测、相干通信系统等领域的设计提供参考。



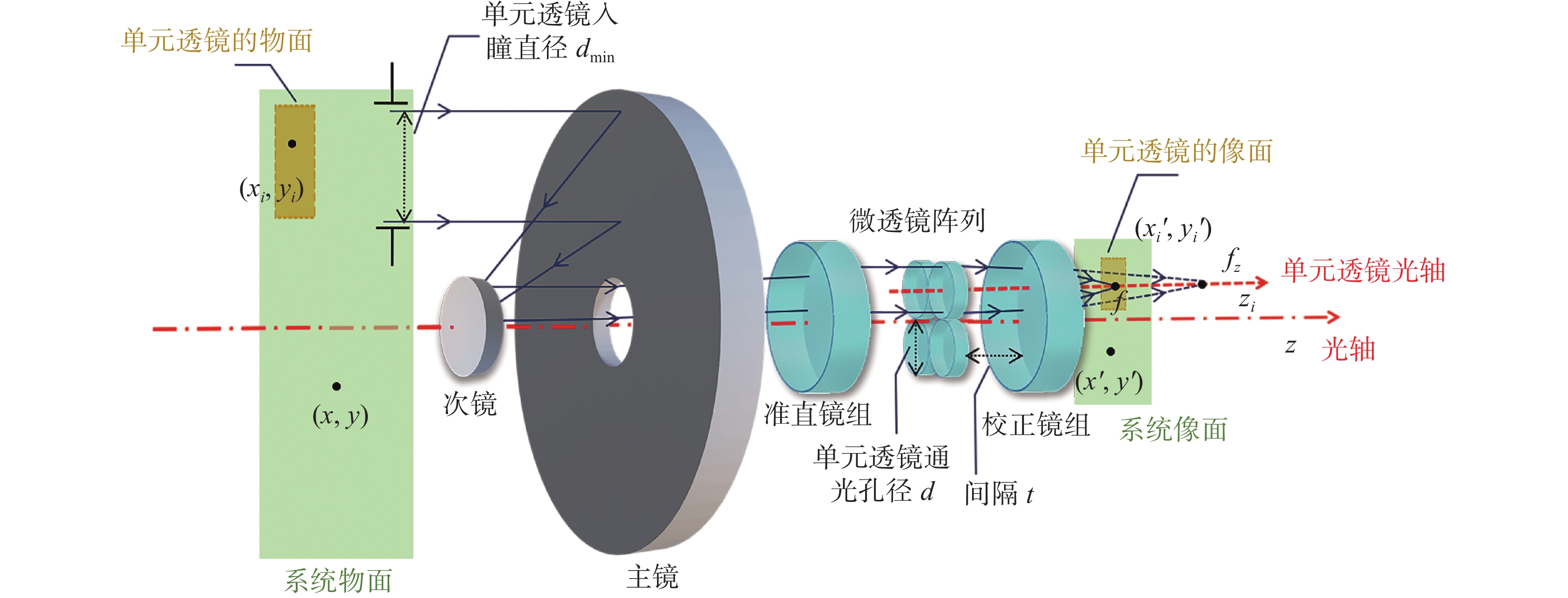
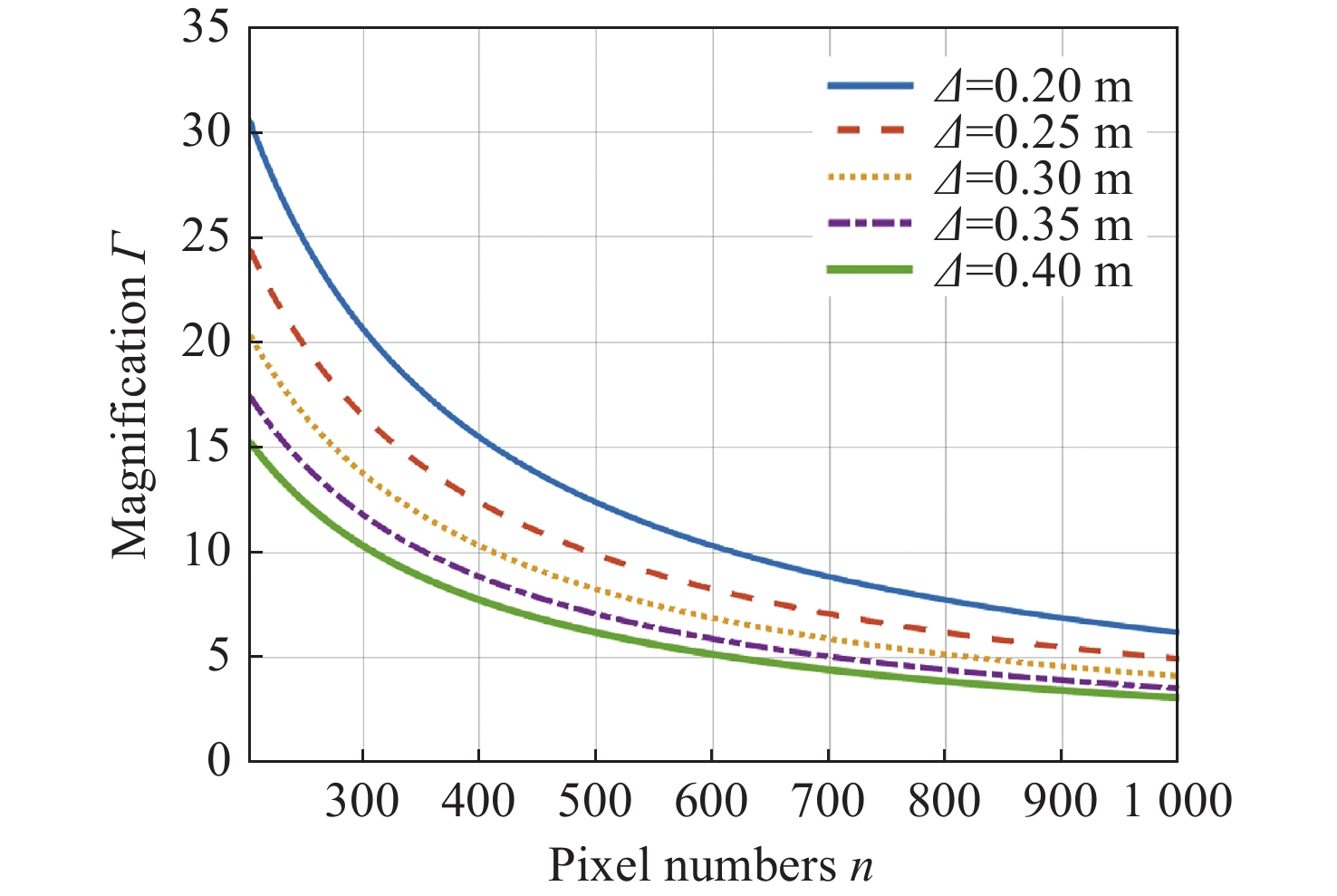
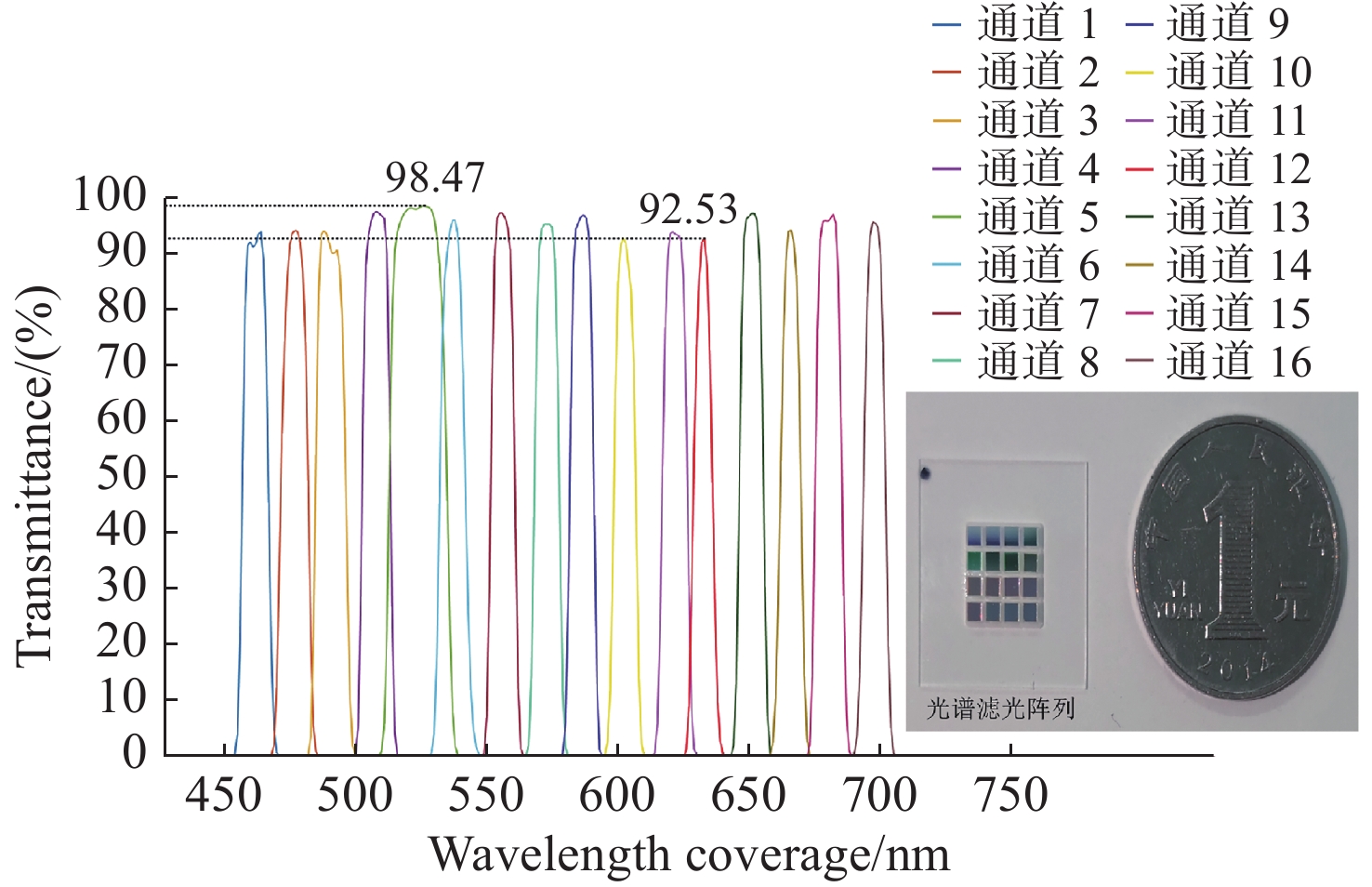
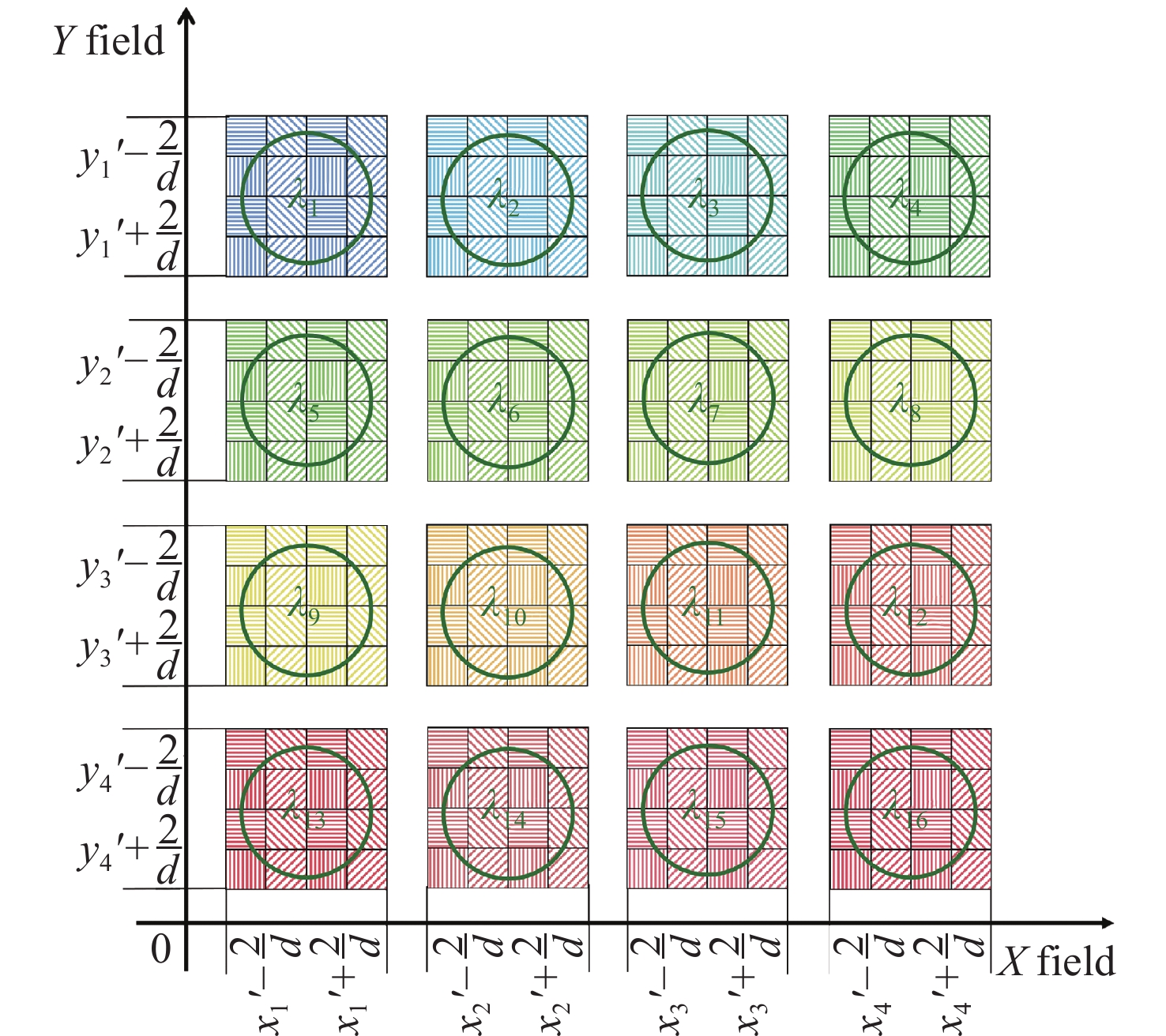
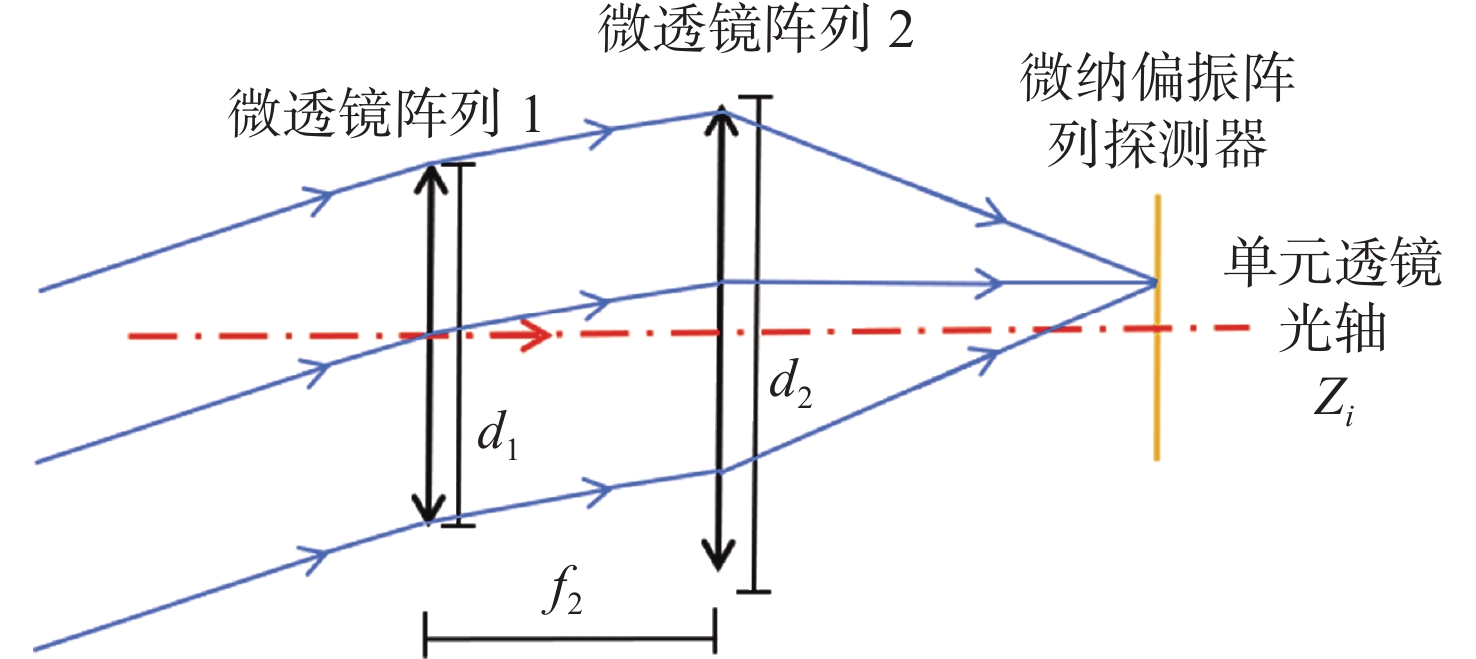
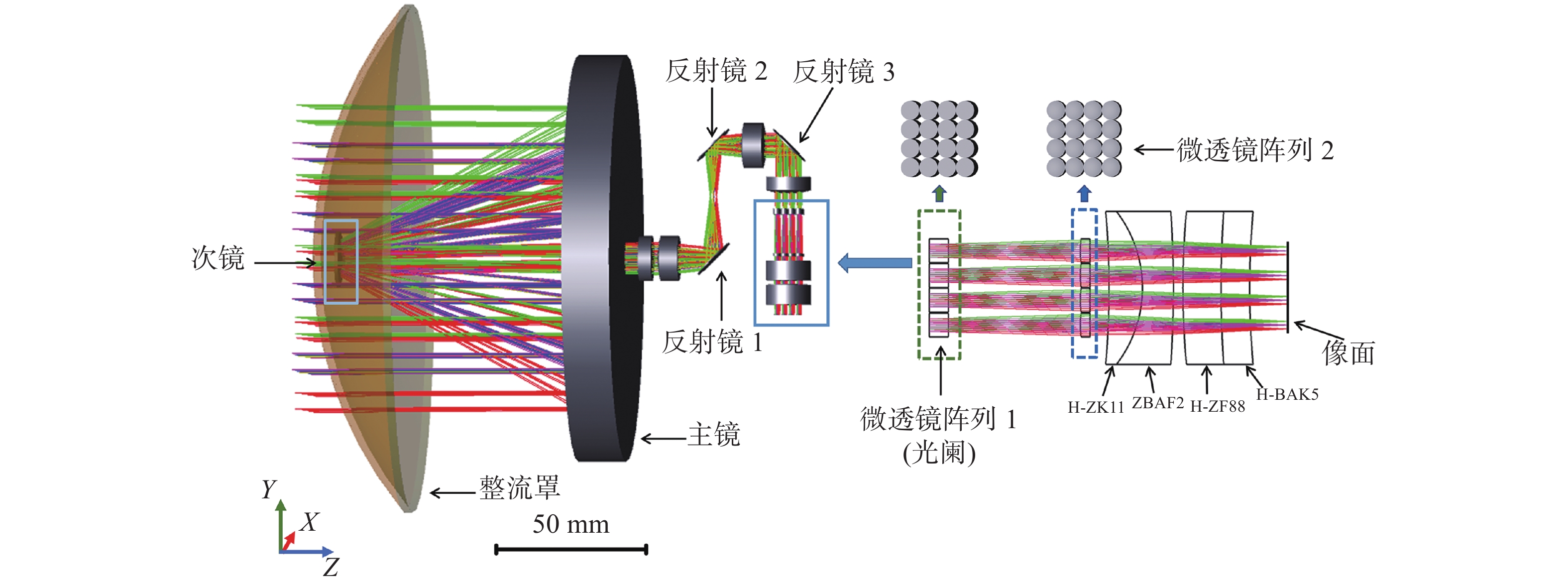
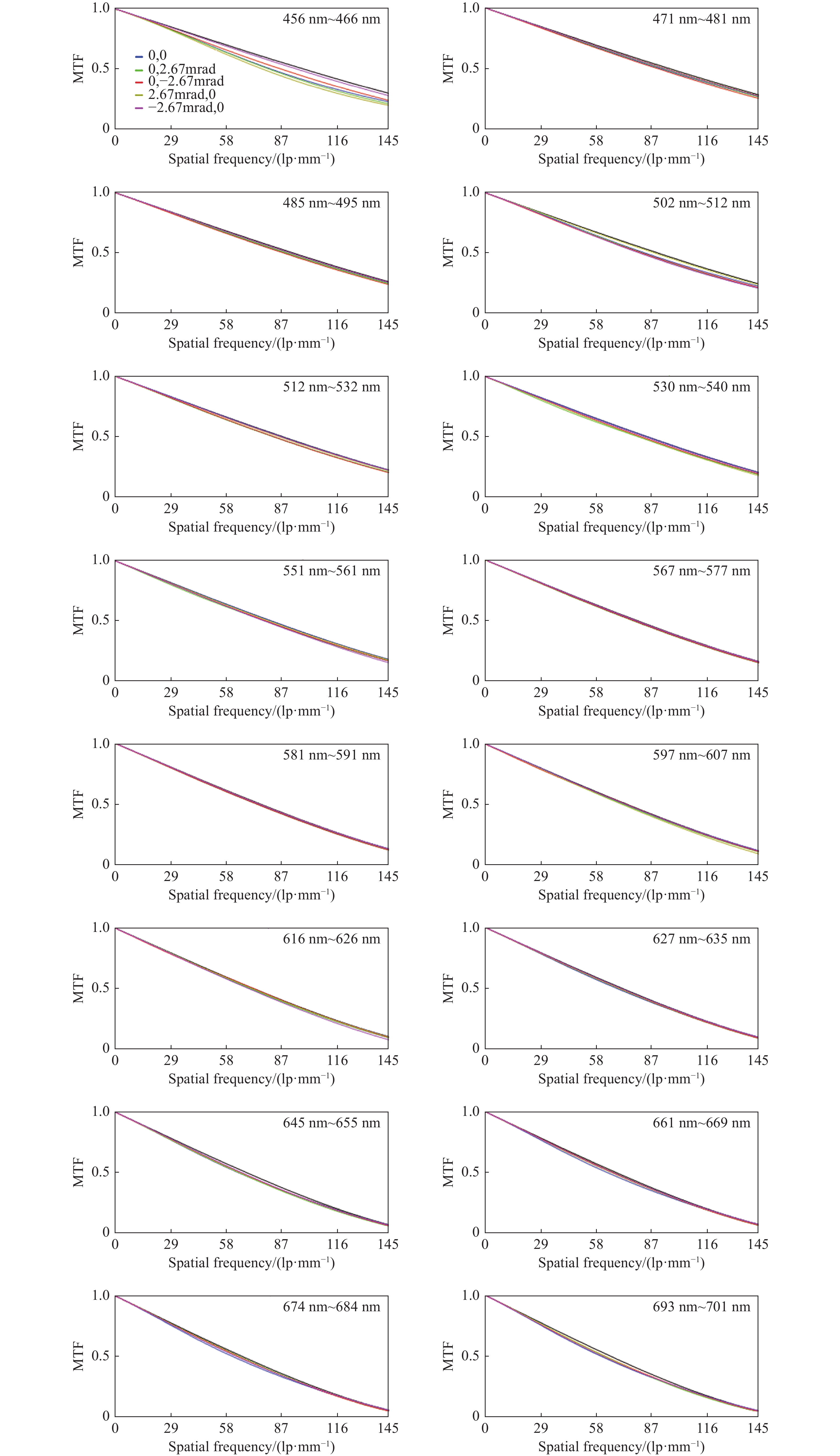
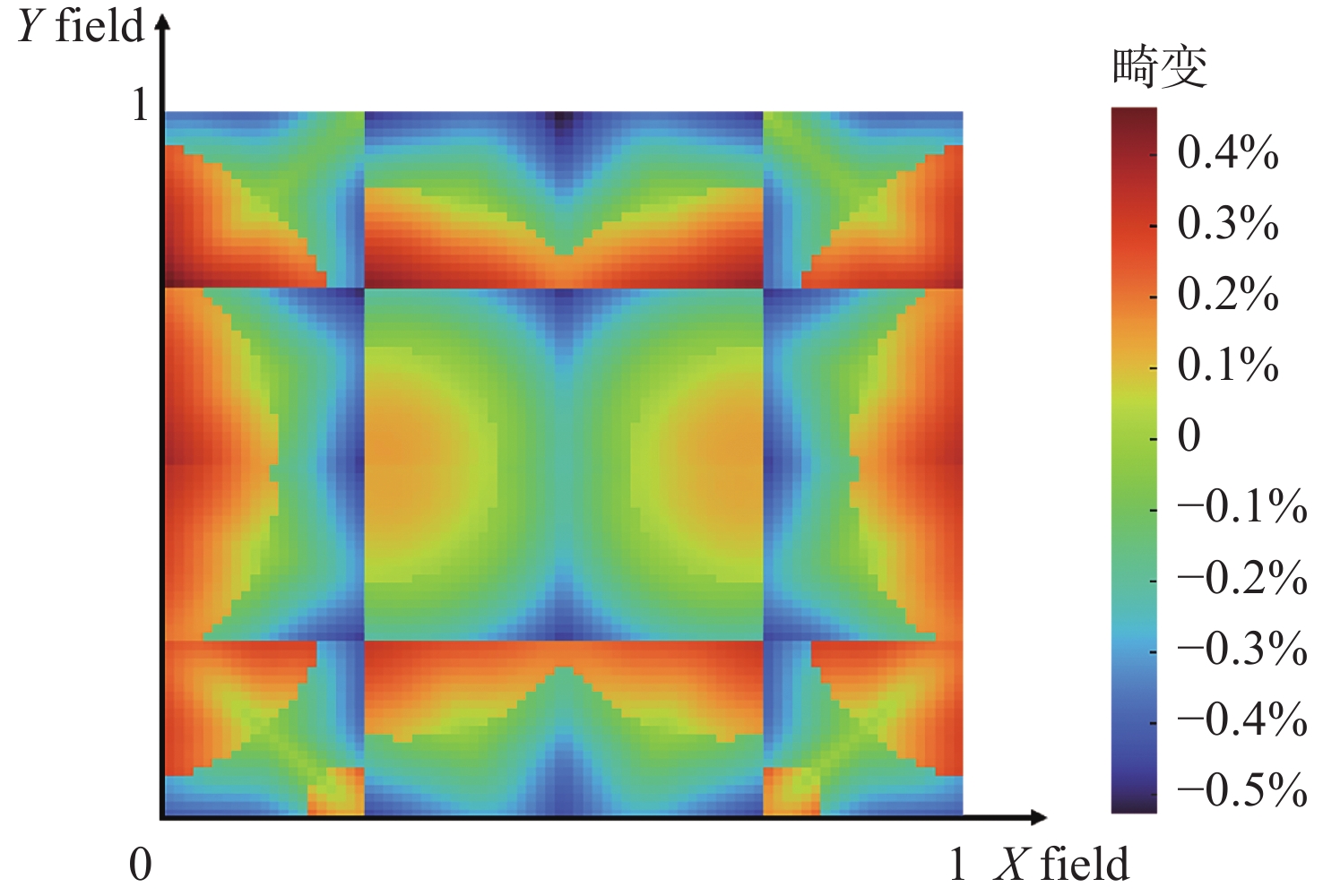
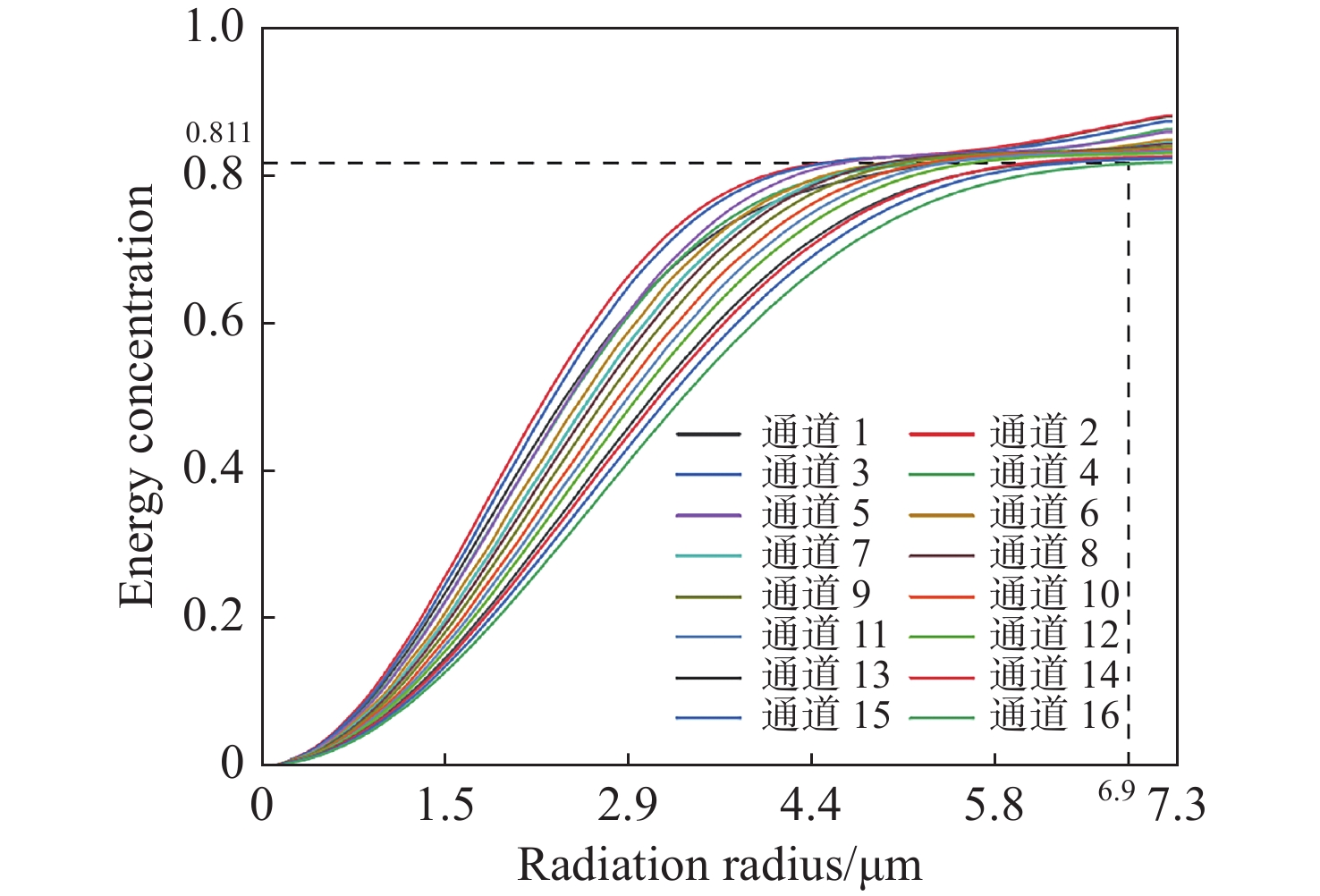
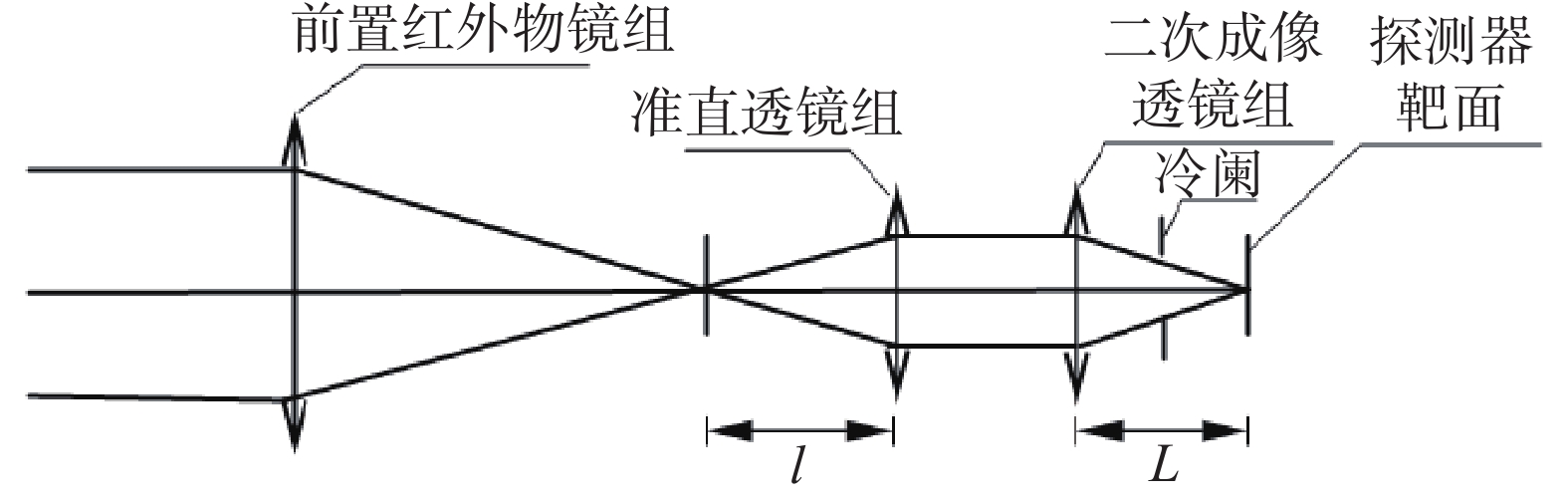
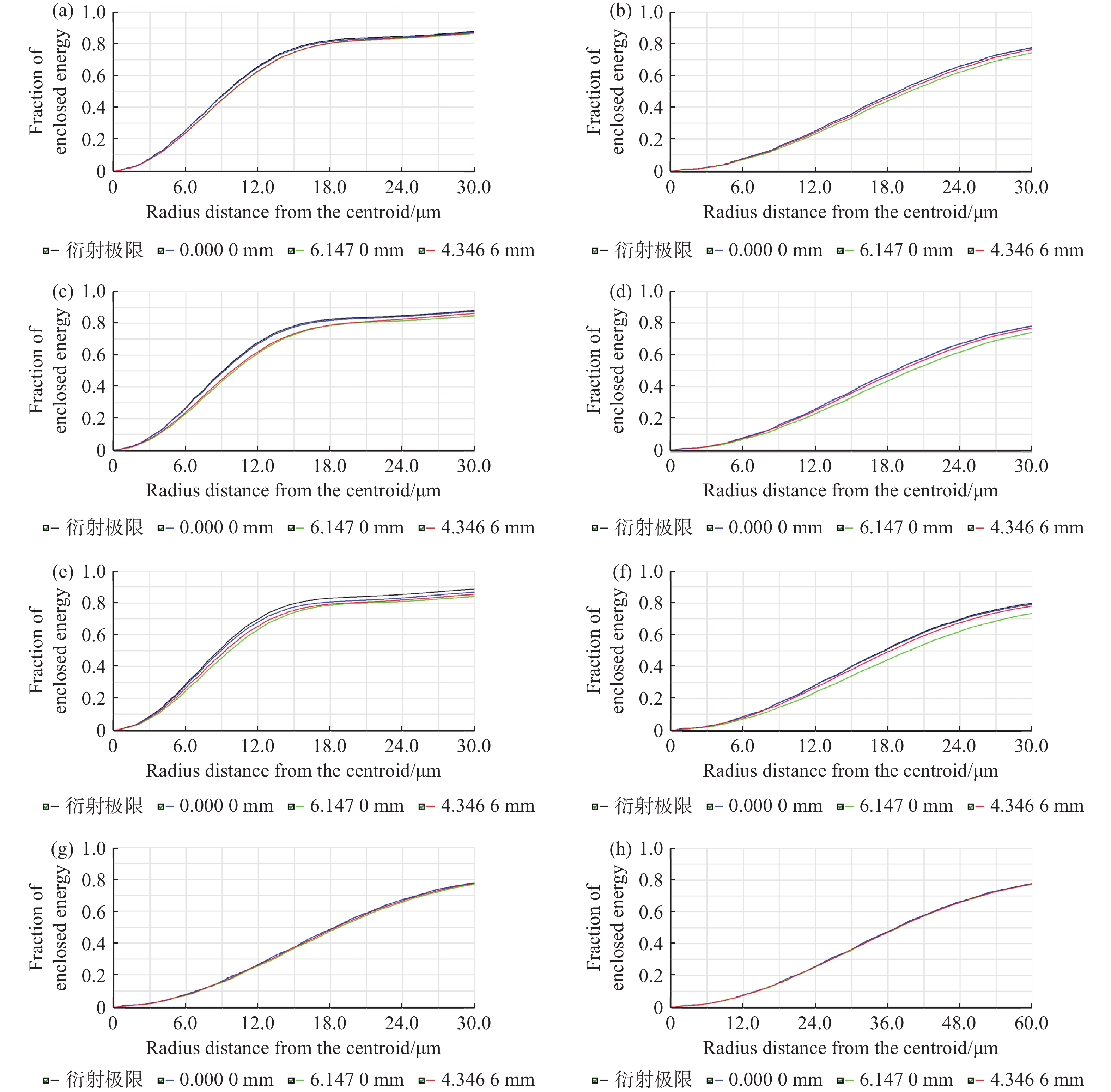
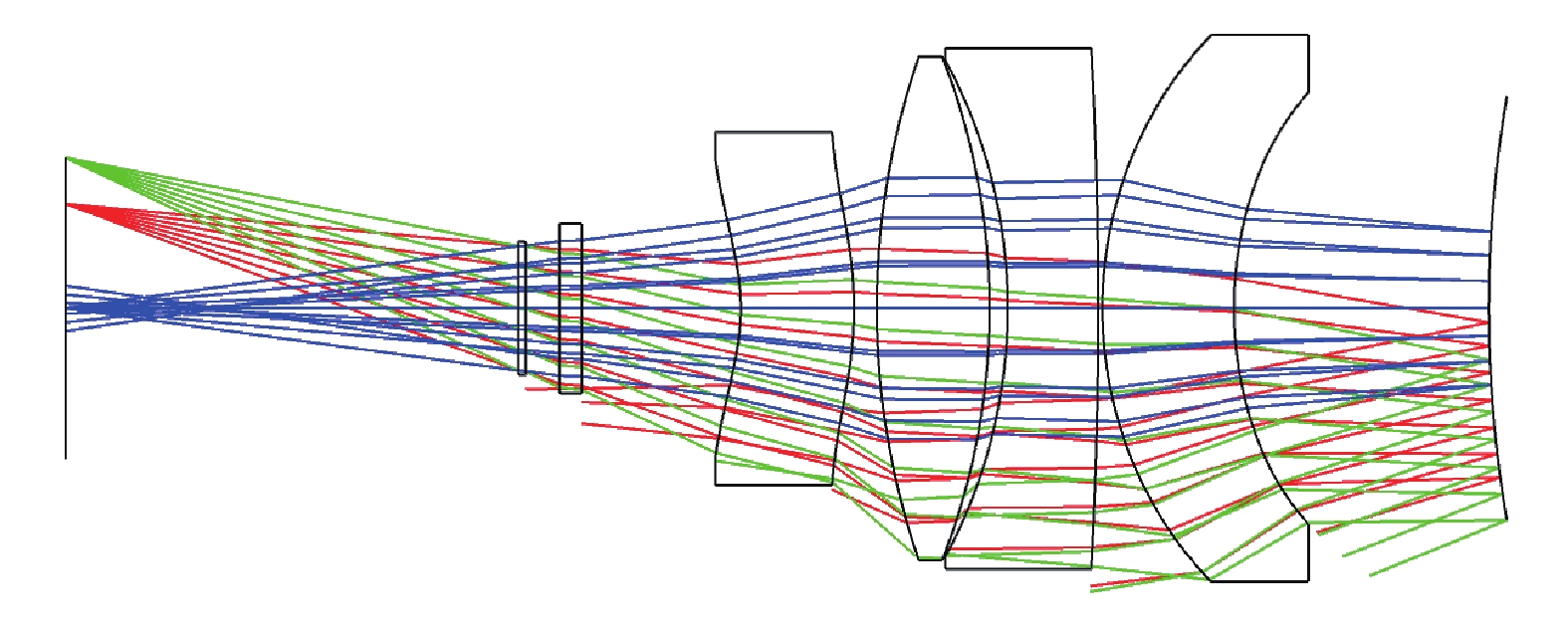
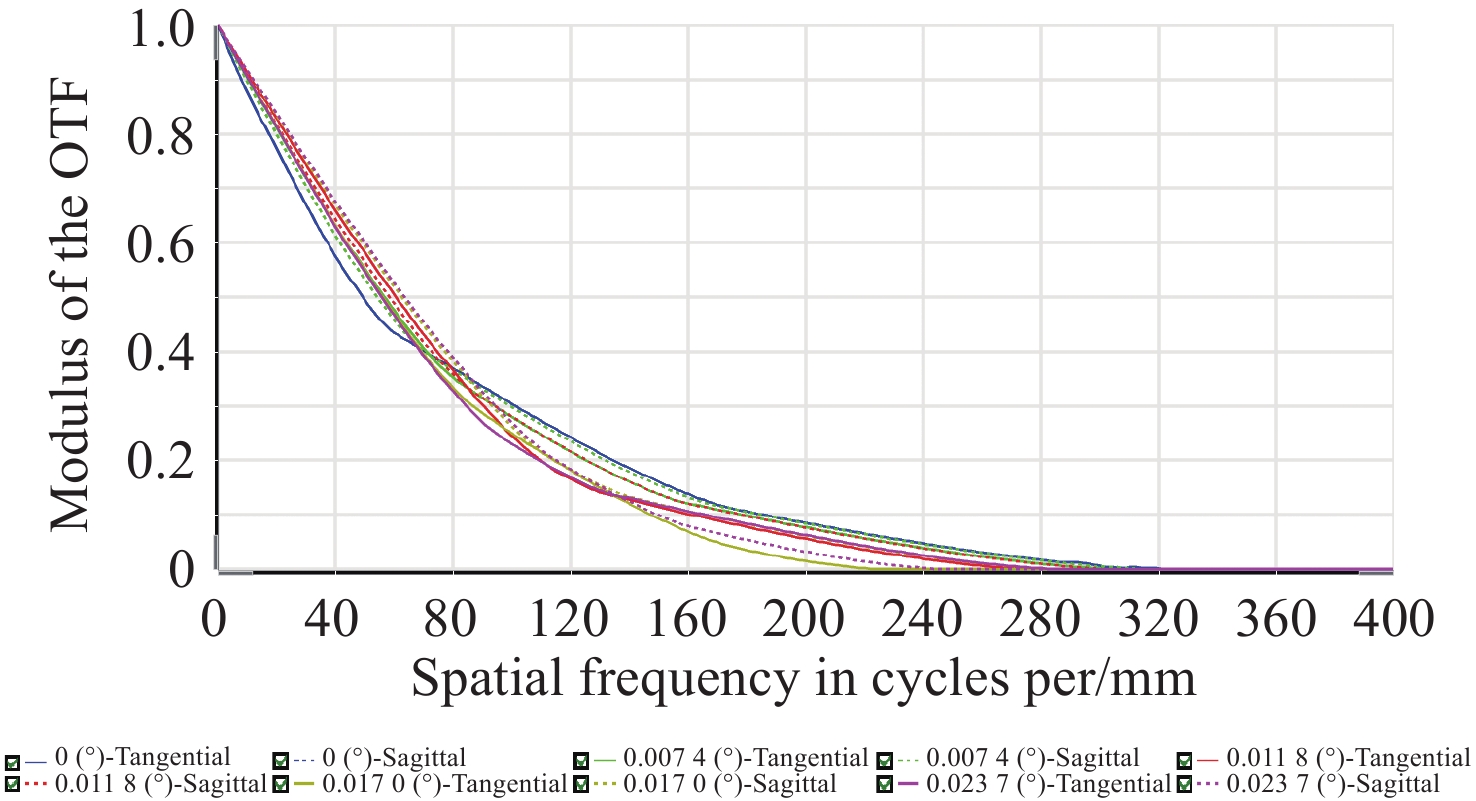
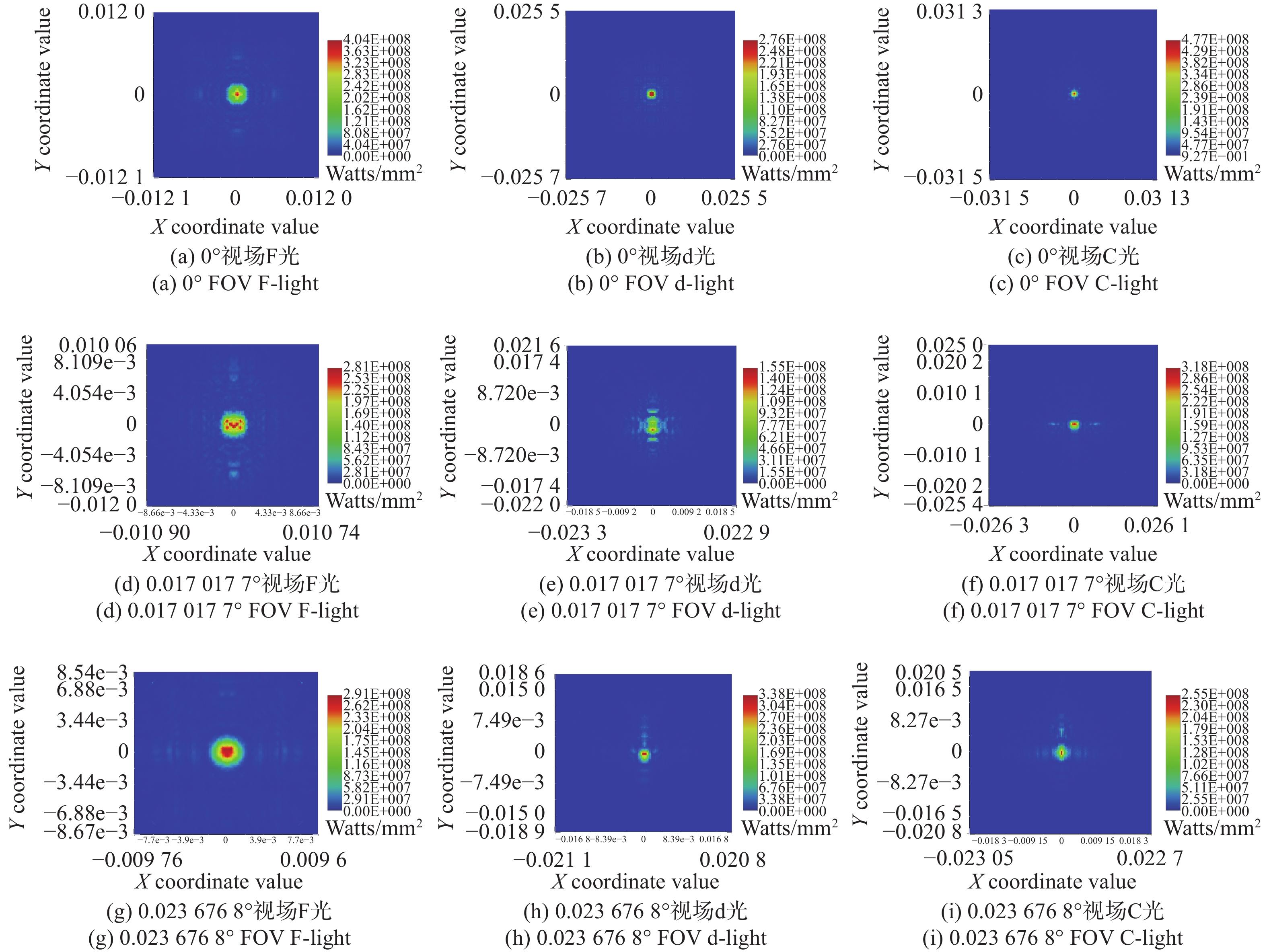
针对传统偏振光谱成像方法难以适用于弹载平台的难题,本文提出了一种基于阵列光学的快速多维度成像制导光学方案。构建了通道分辨率与望远放大倍率的关联模型,实现了微透镜阵列、光谱滤光阵列和微纳偏振阵列探测器参数的精准匹配和高效利用。基于常规导引头和工业偏振探测器,设计了包含球形整流罩的多维度成像制导光学系统。系统采用4×4光场分割布局,在可见光波段内形成16个光谱通道,光谱分辨率为16 nm,实现了单光路、单探测器条件下同时高效获取0°、45°、90°、135° 4个偏振方向偏振光谱图像数据。系统整体焦距为150 mm,筒长为145 mm。仿真结果表明,系统16个通道下全视场调制传递函数在奈奎斯特频率处均接近衍射极限,成像质量良好,满足弹载目标多维度探测与识别需求。
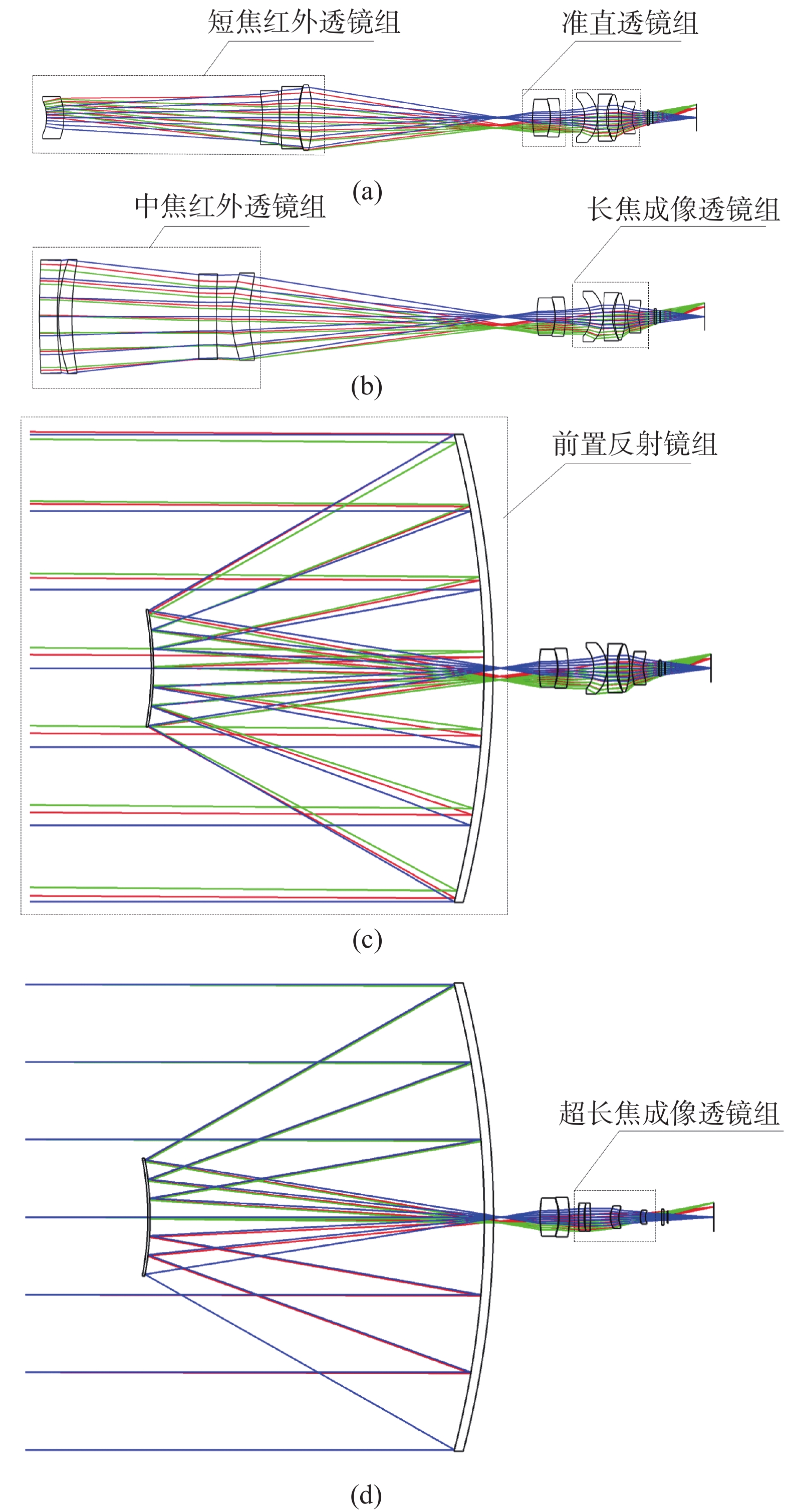
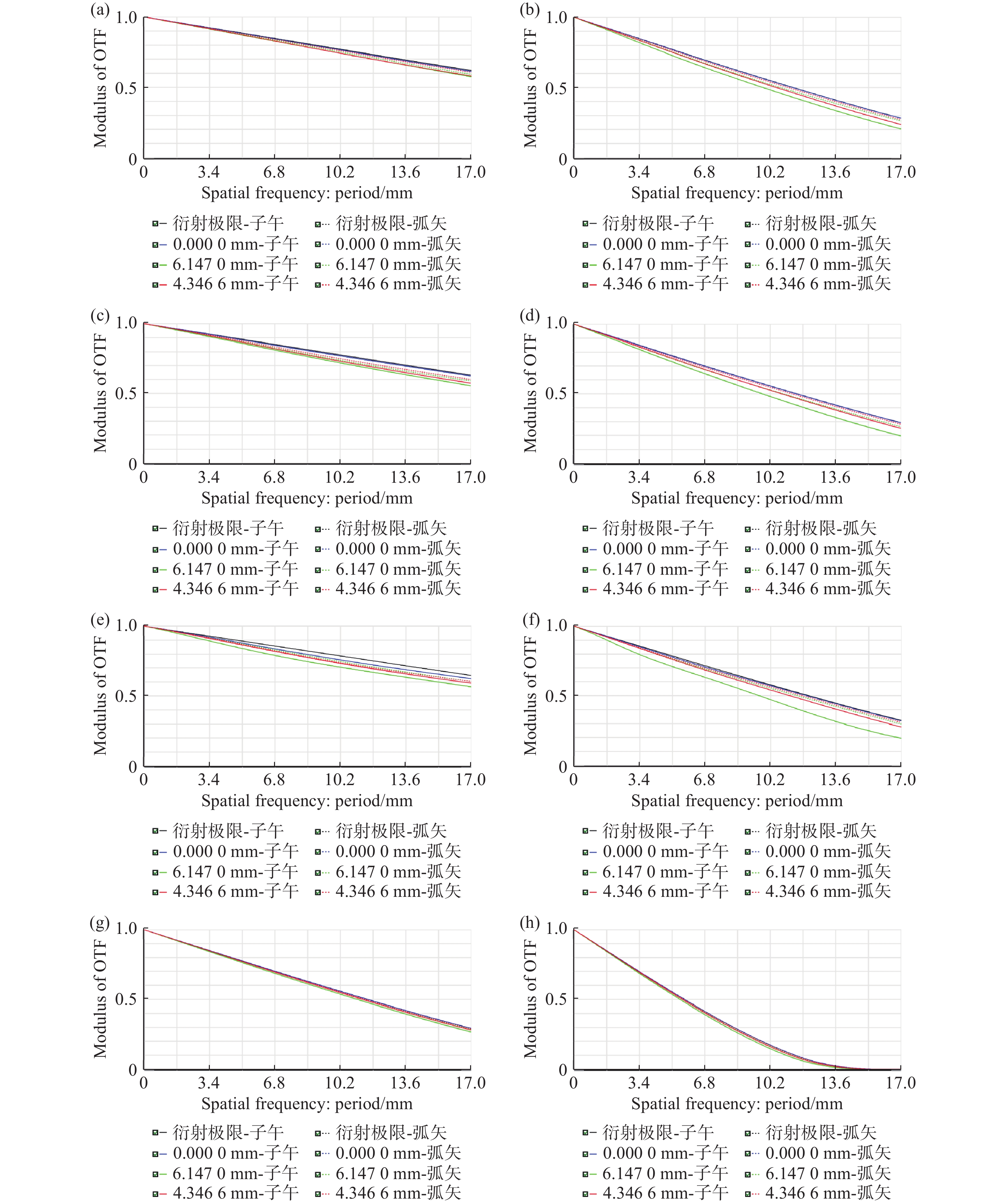
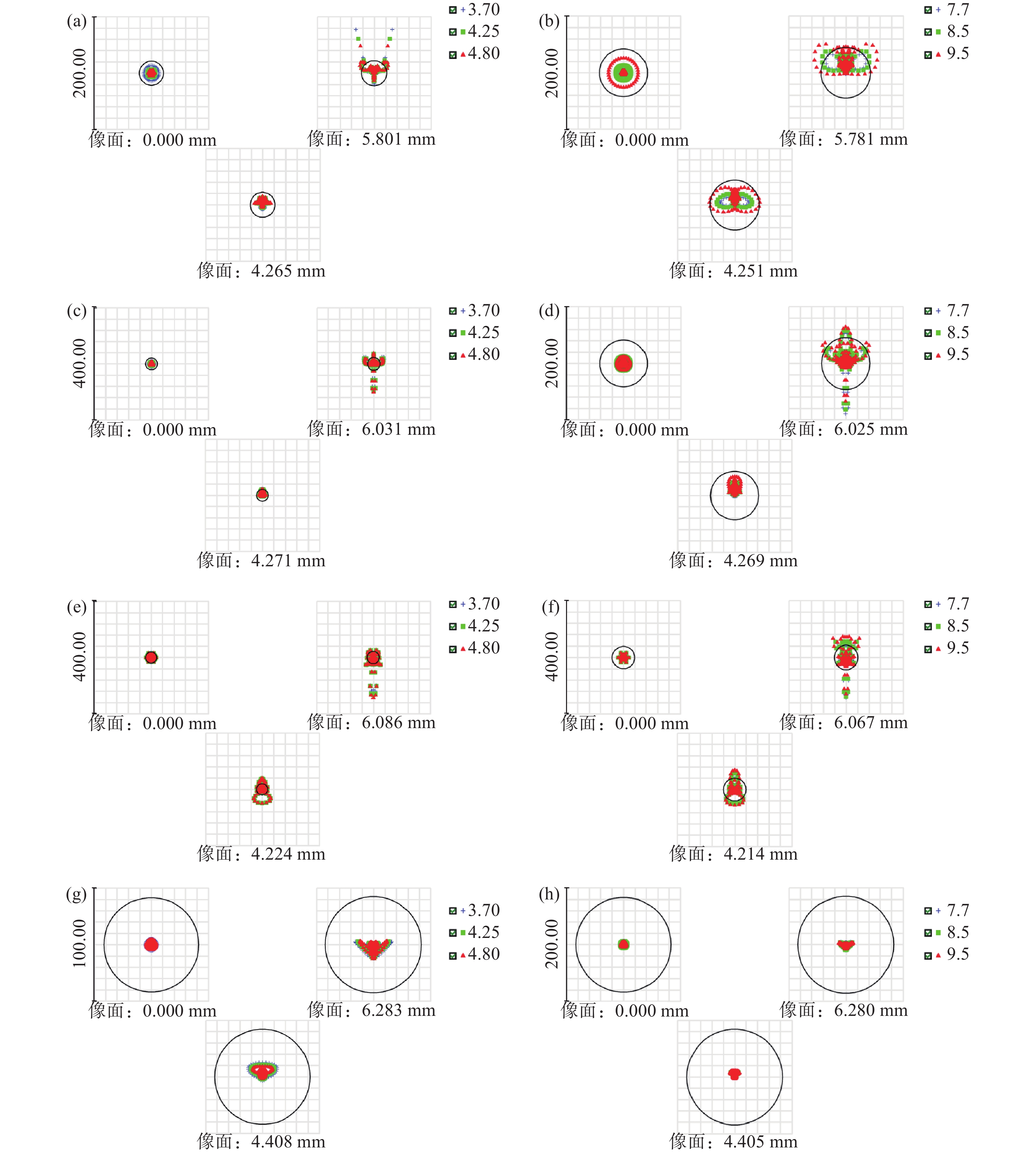
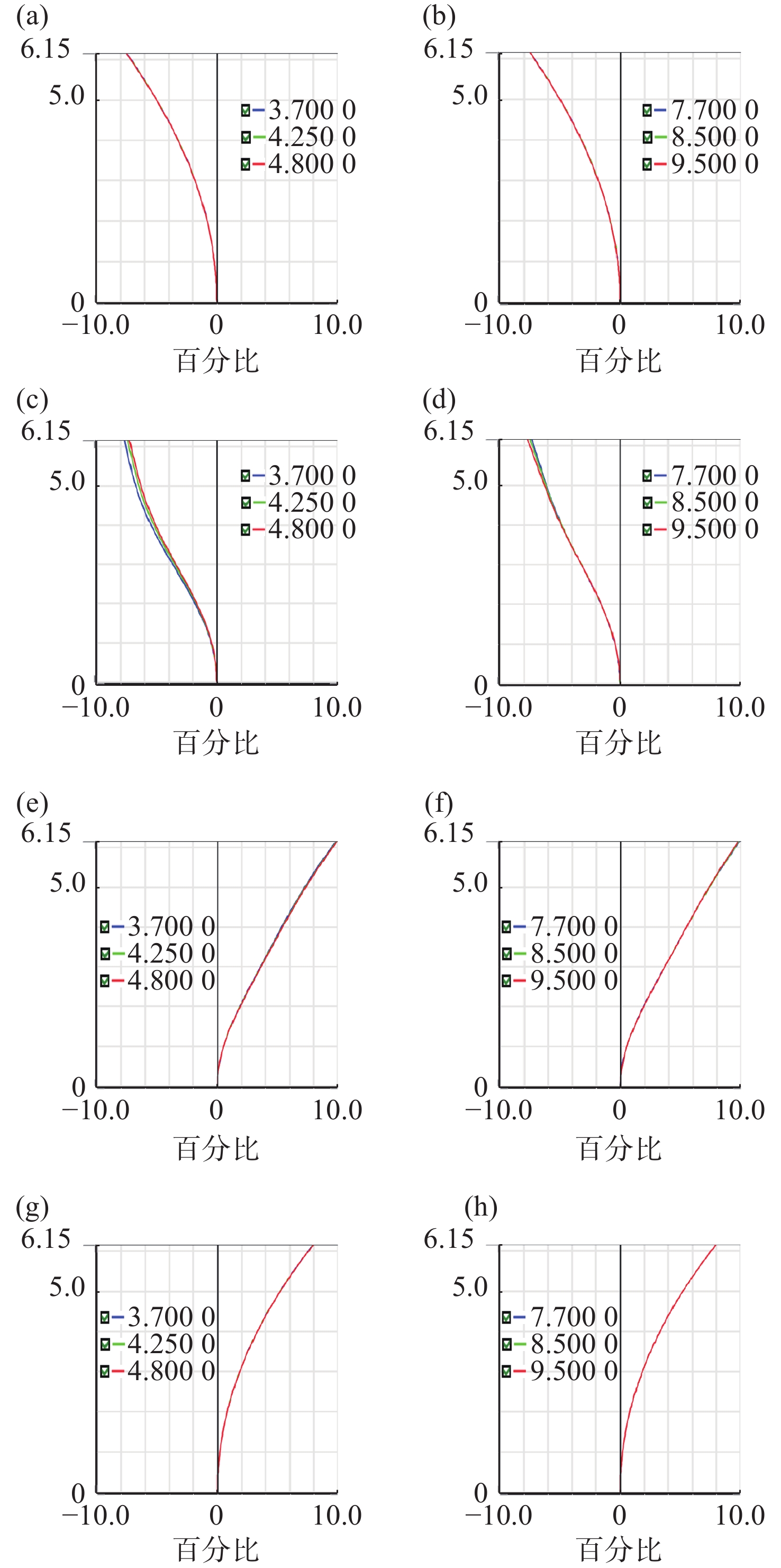
第三代红外焦平面探测器的不断发展使得探测器可以同时对两个不同波段的红外辐射进行响应,从而输出双波段对应图像,双波段图像在目标探测和识别领域应用前景广阔。本文针对航空探测应用,采用320×256双色红外制冷型探测器,设计了一种工作波段在中波3.7~4.8 μm和长波7.7~9.5 μm的大变倍比制冷型红外双波段变焦光学系统,用于对目标的红外探测。该光学系统采用折射式和折反式结构相结合的方式,可实现光学四视场切换式大范围变焦,采用二次成像以达到100%冷光阑效率。该光学系统四视场焦距分别为32 mm、200 mm、800 mm、
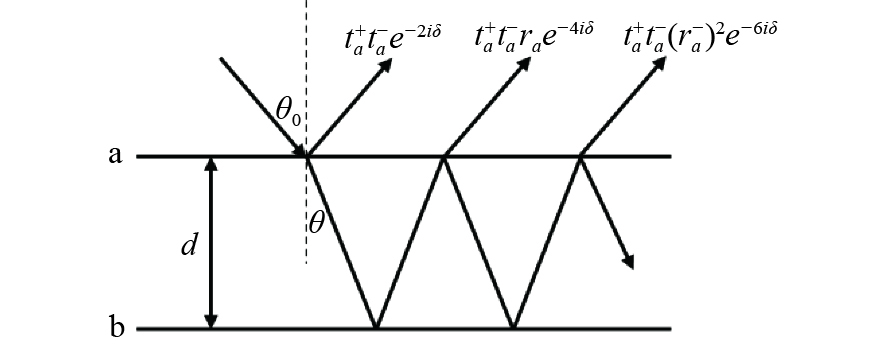
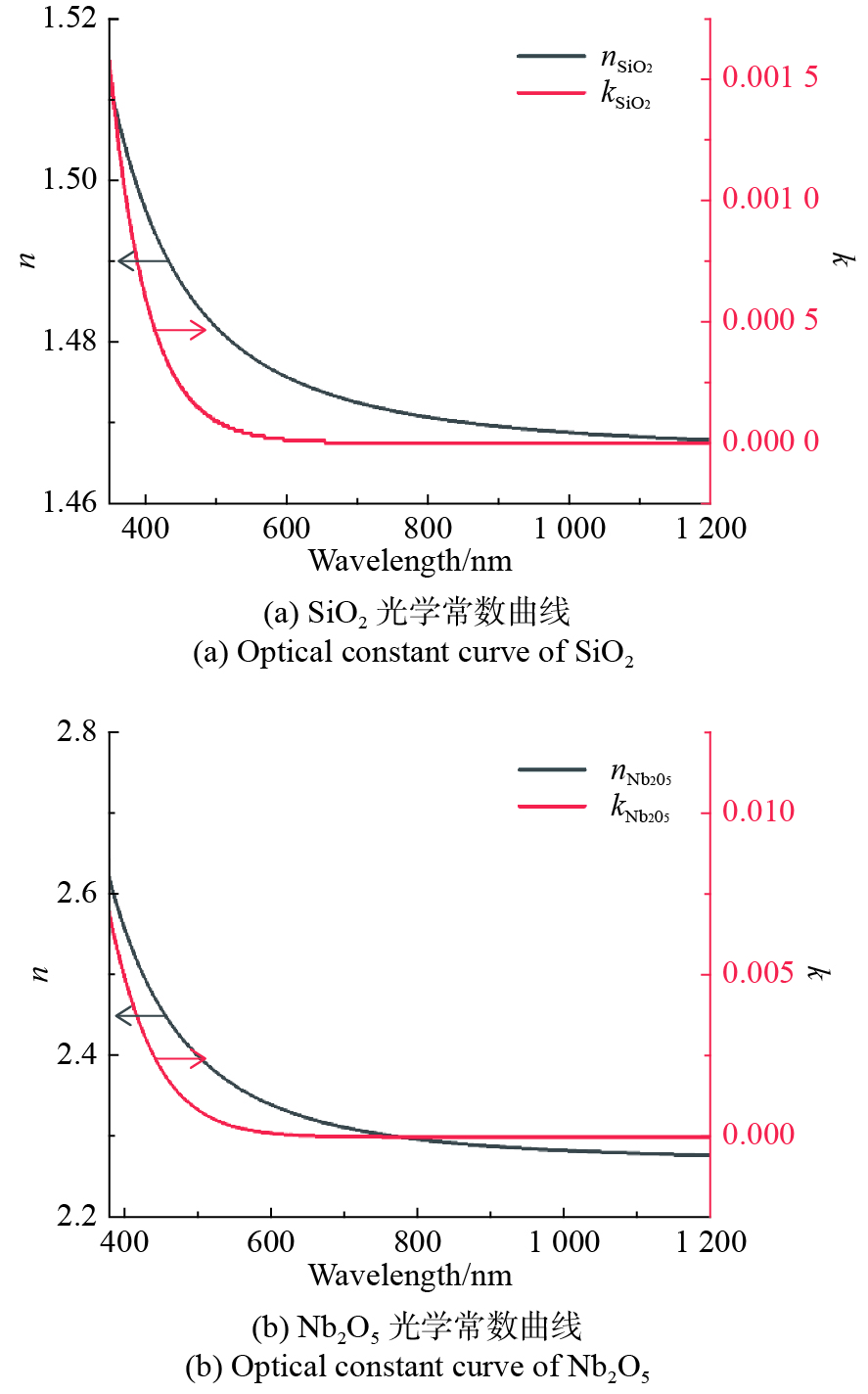
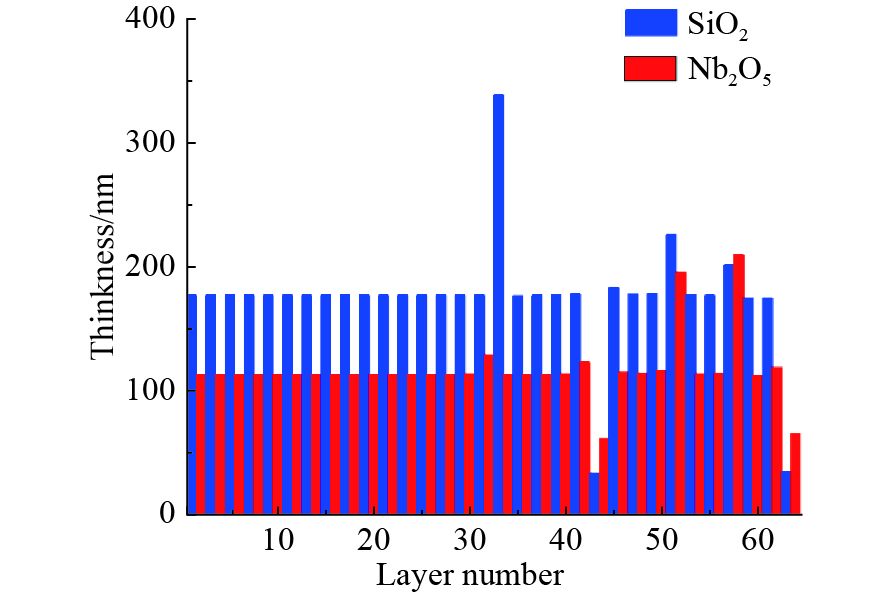
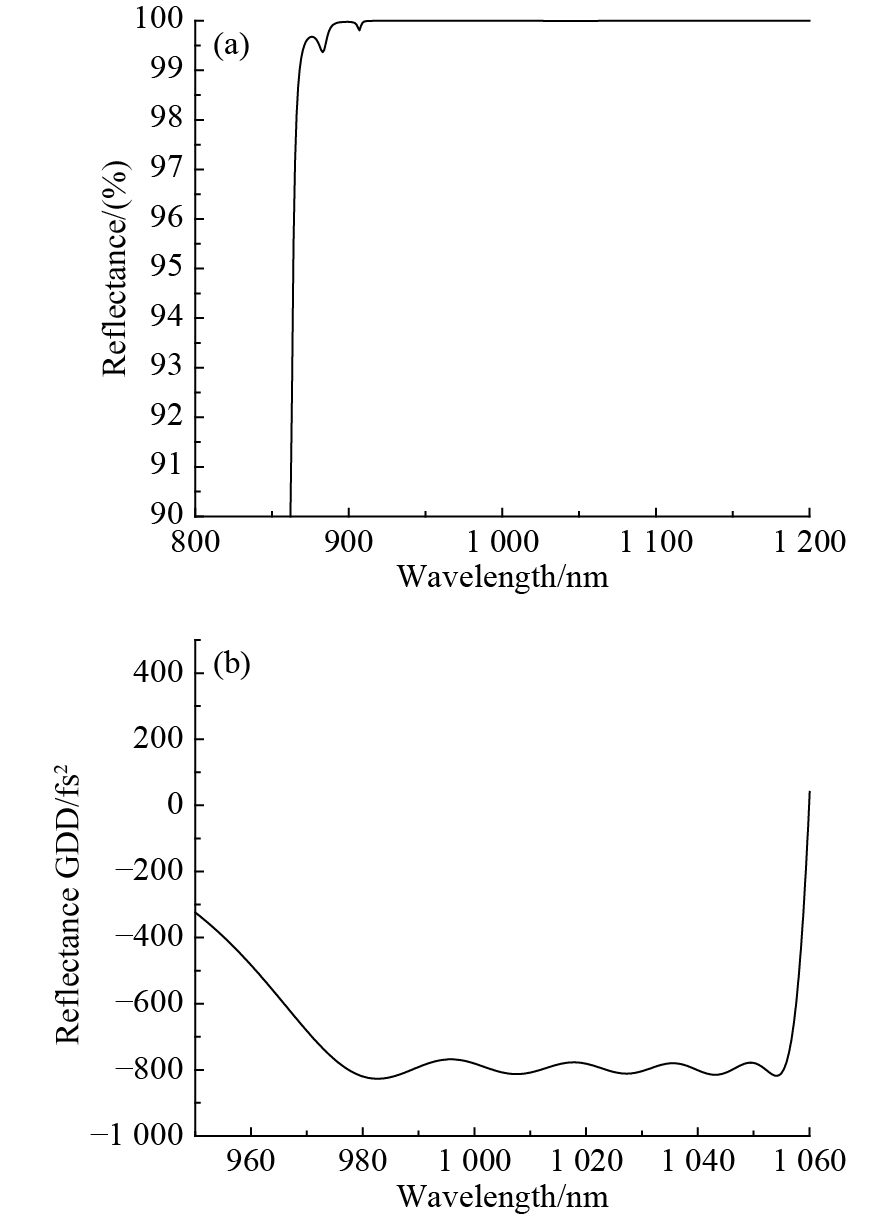
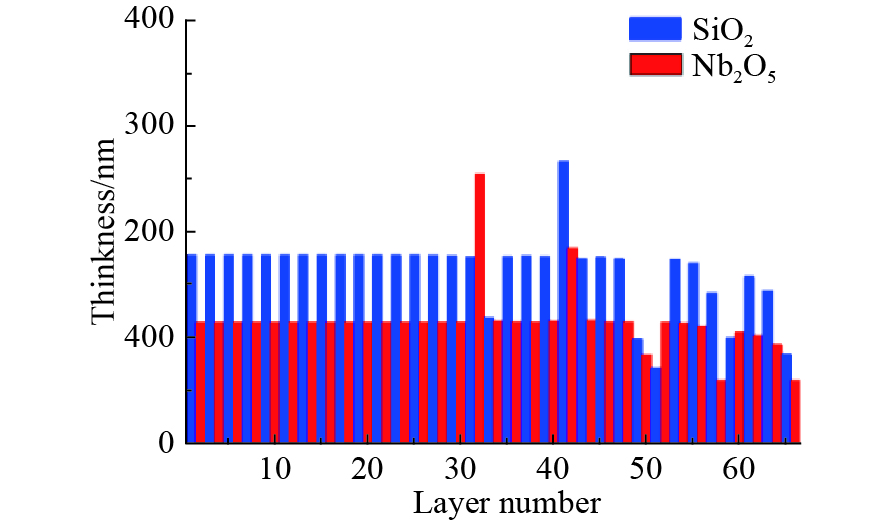
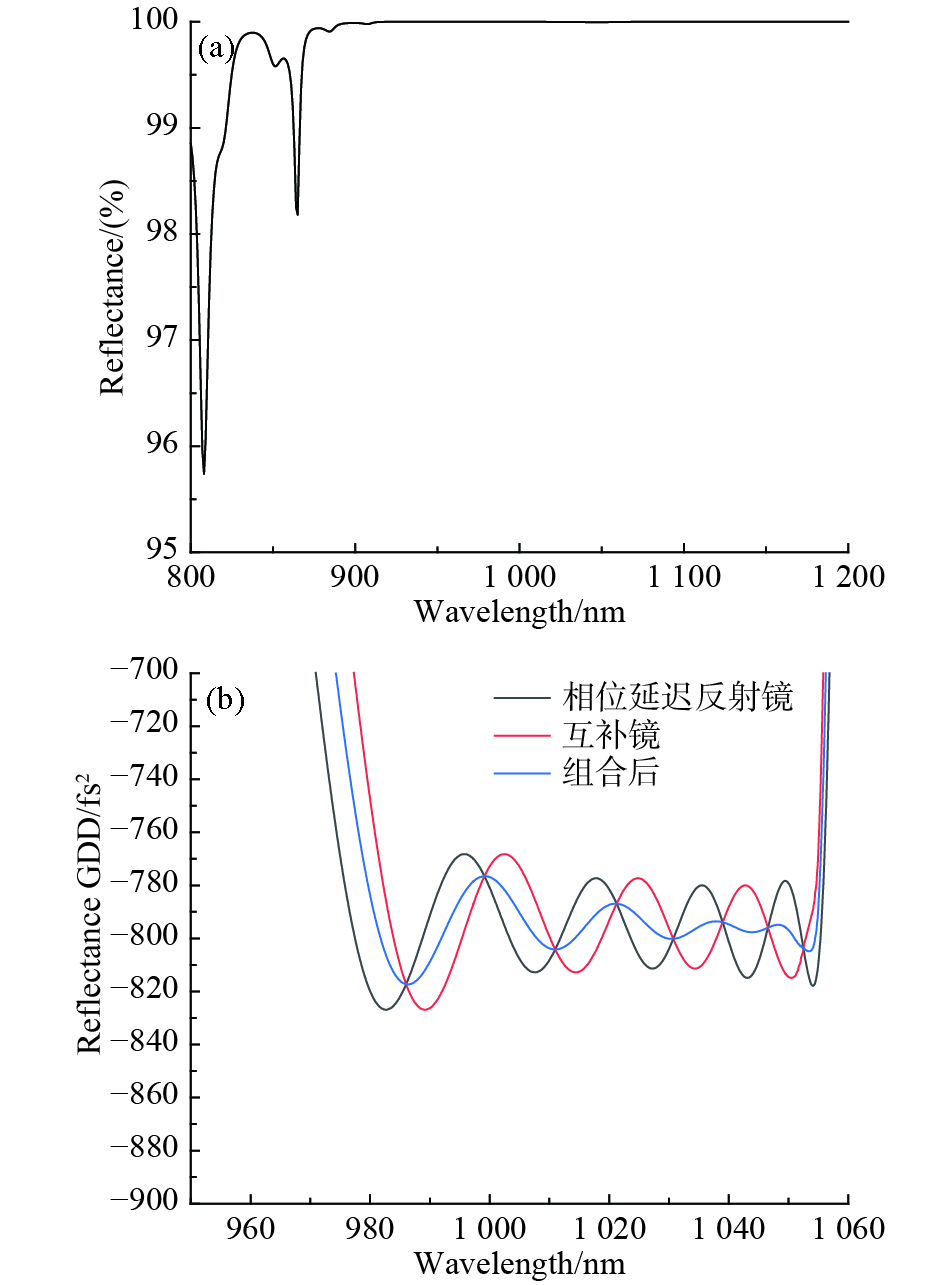
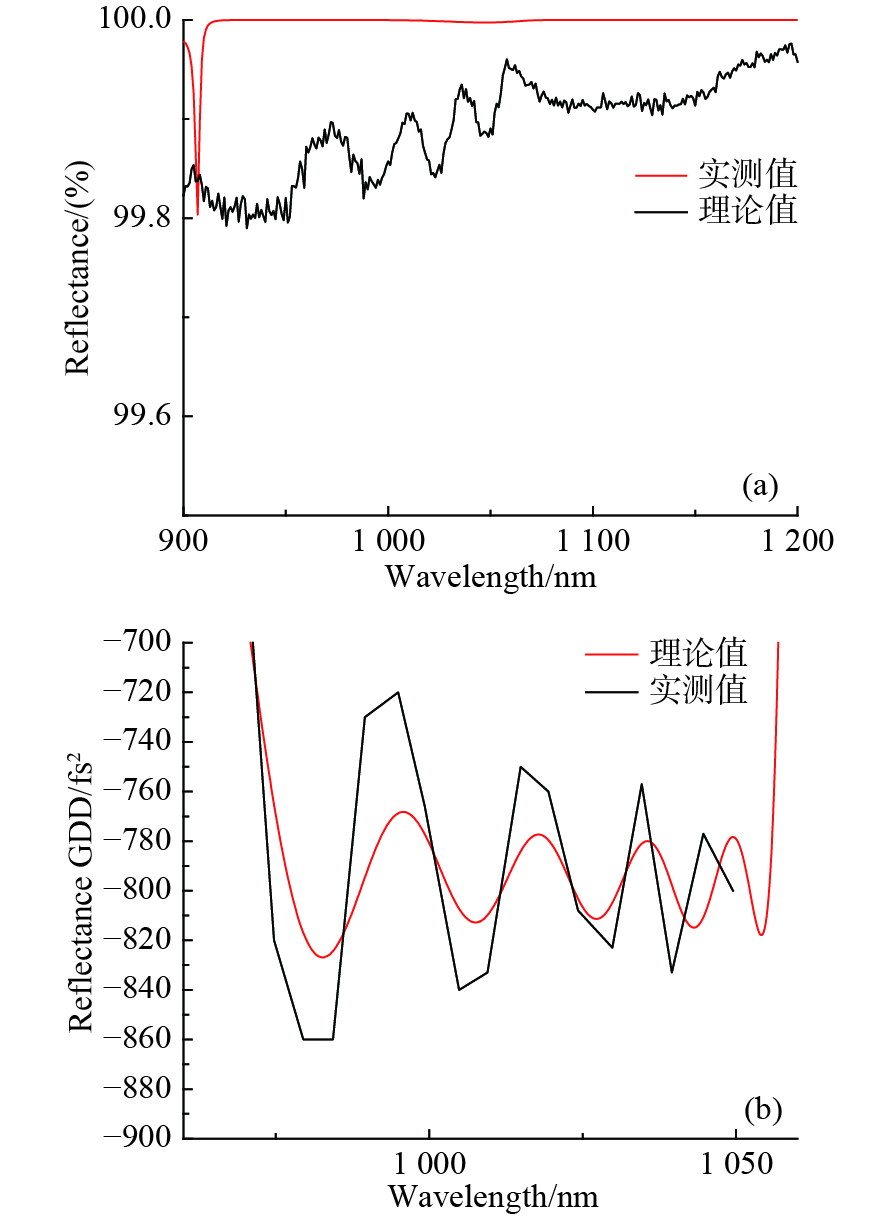
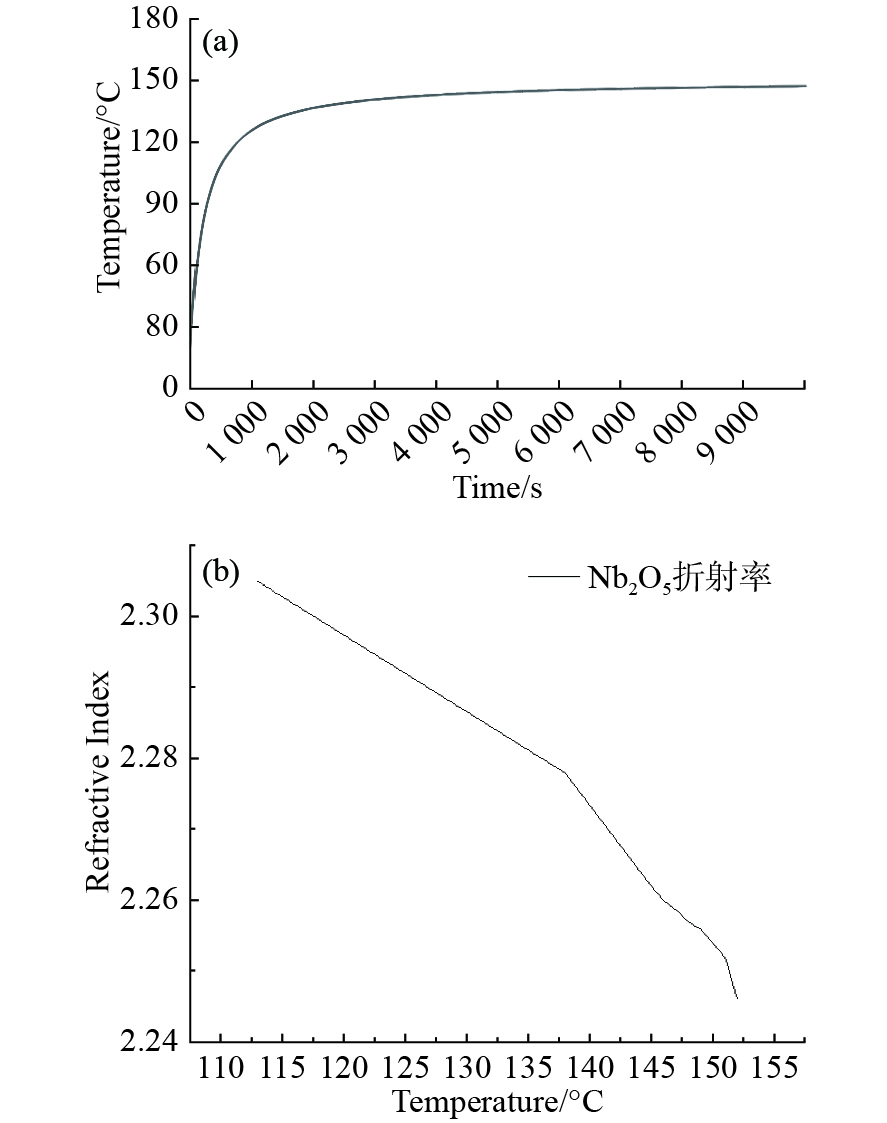
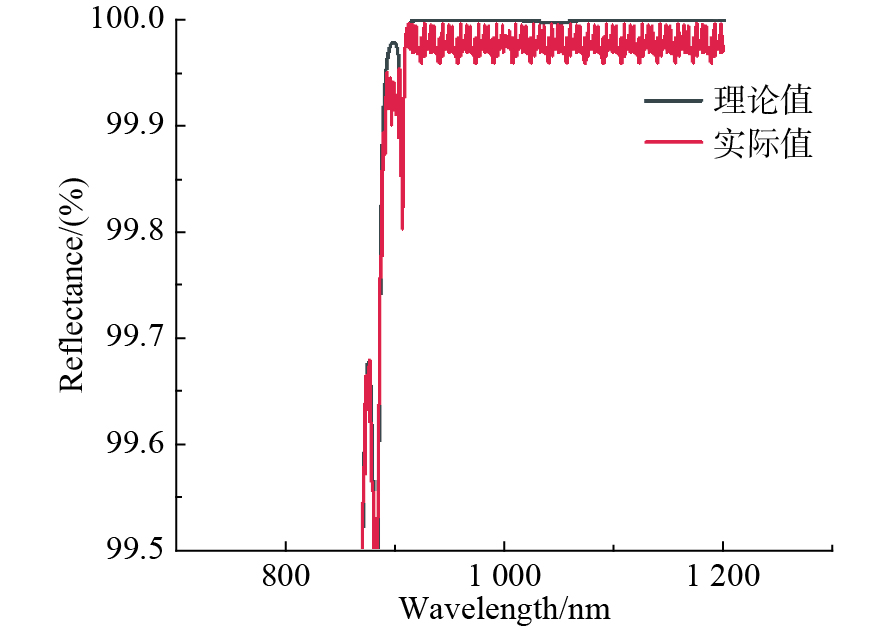
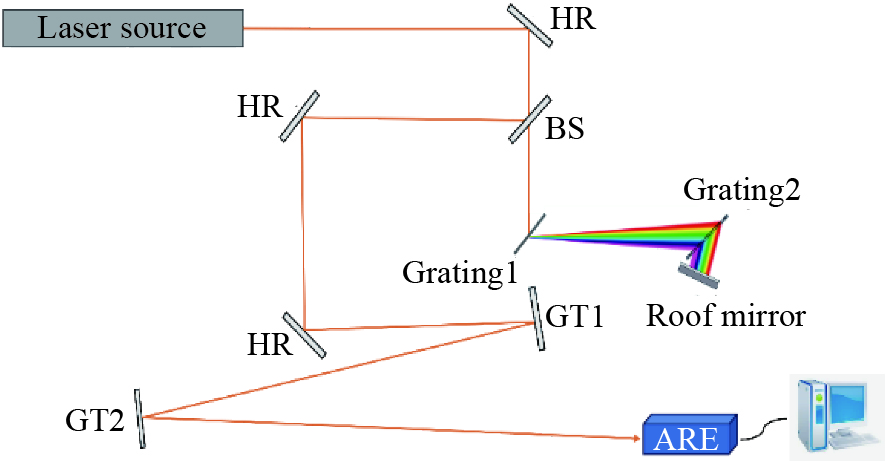
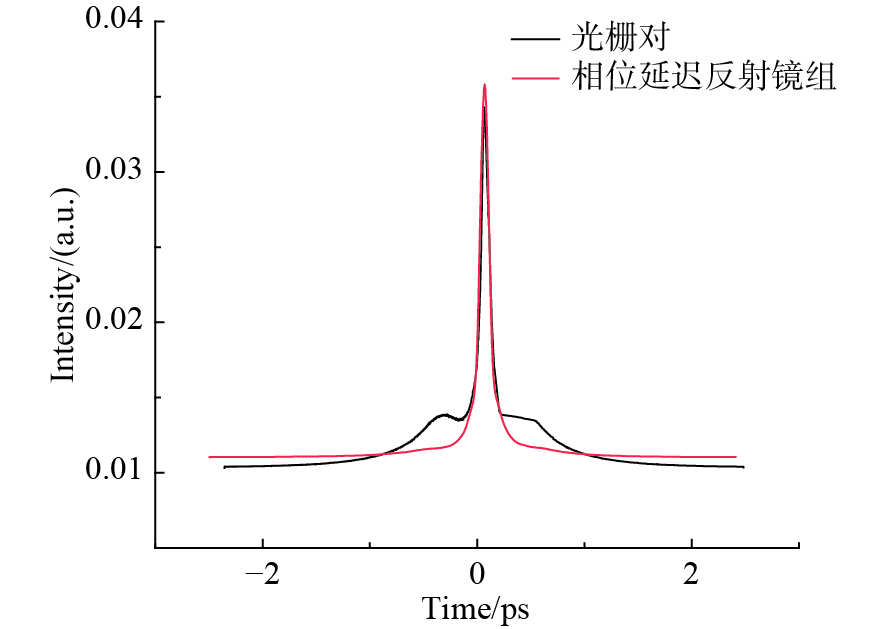
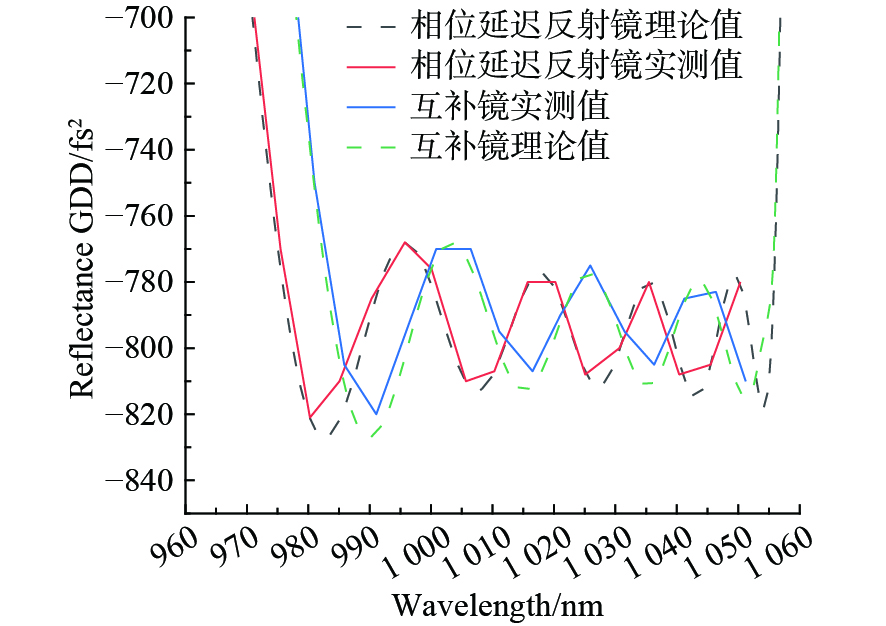
为了对飞秒激光系统的群延迟色散(group-delay dispersion,GDD)进行调控,设计并制备了相位延迟反射镜。本文系统地研究了相位延迟反射镜补偿群延迟色散原理,使用Nb2O5和SiO2作为高低折射率材料,并采用将相位延迟反射镜与其互补镜配对的方式平缓了群延迟色散曲线,制备出了相位调控数据为−800 fs2的相位延迟反射镜。该反射镜在900~
本文设计了一种可在
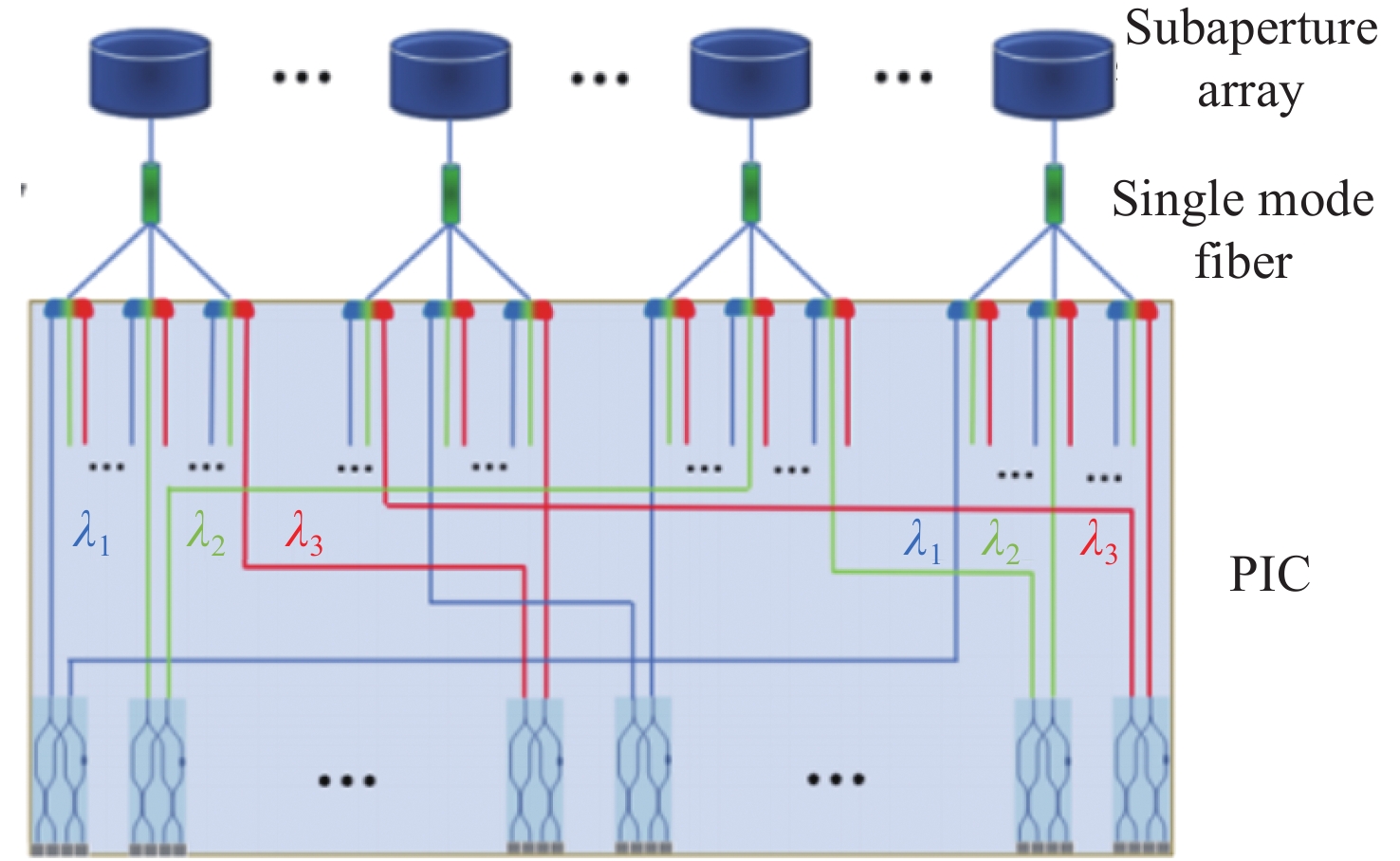
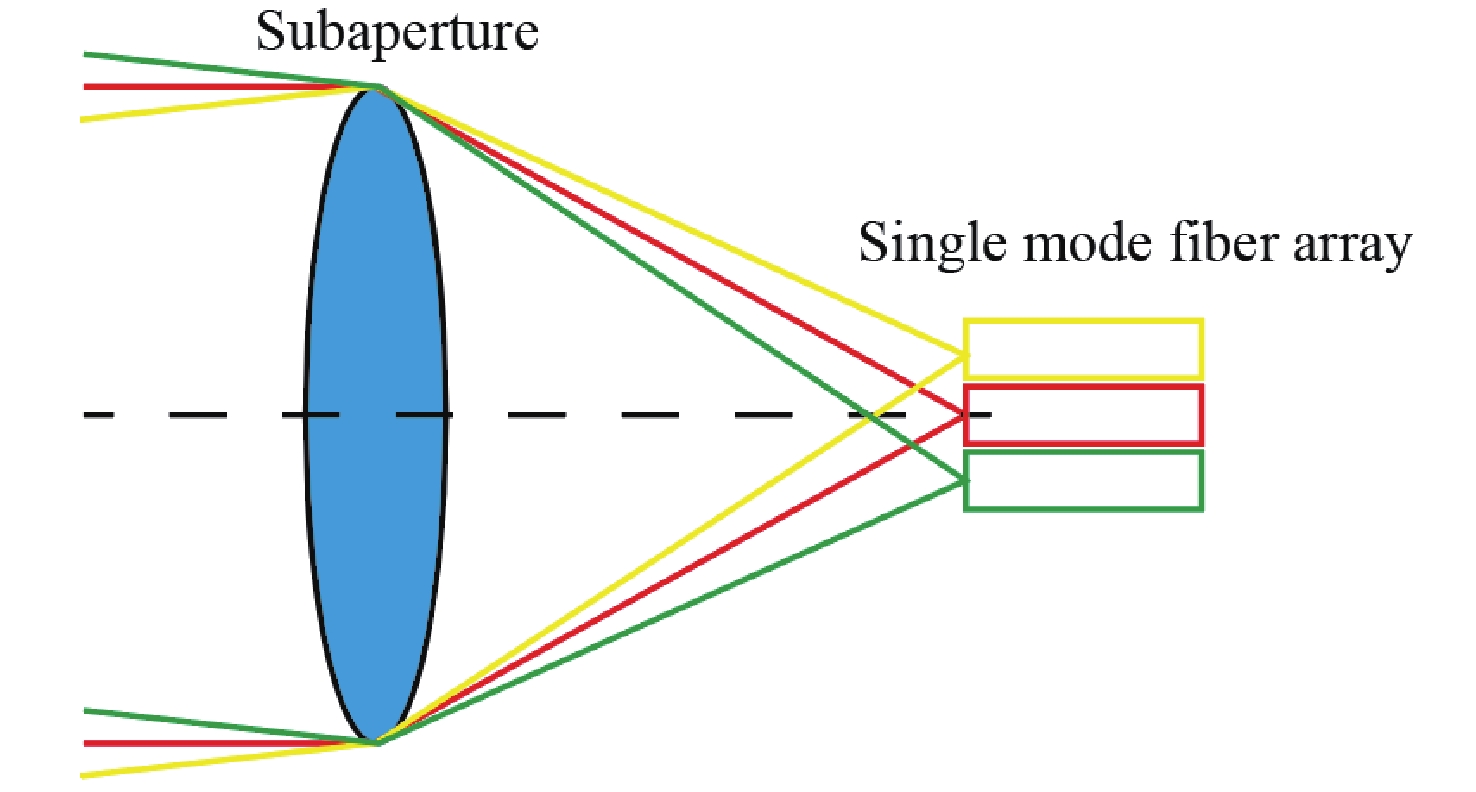
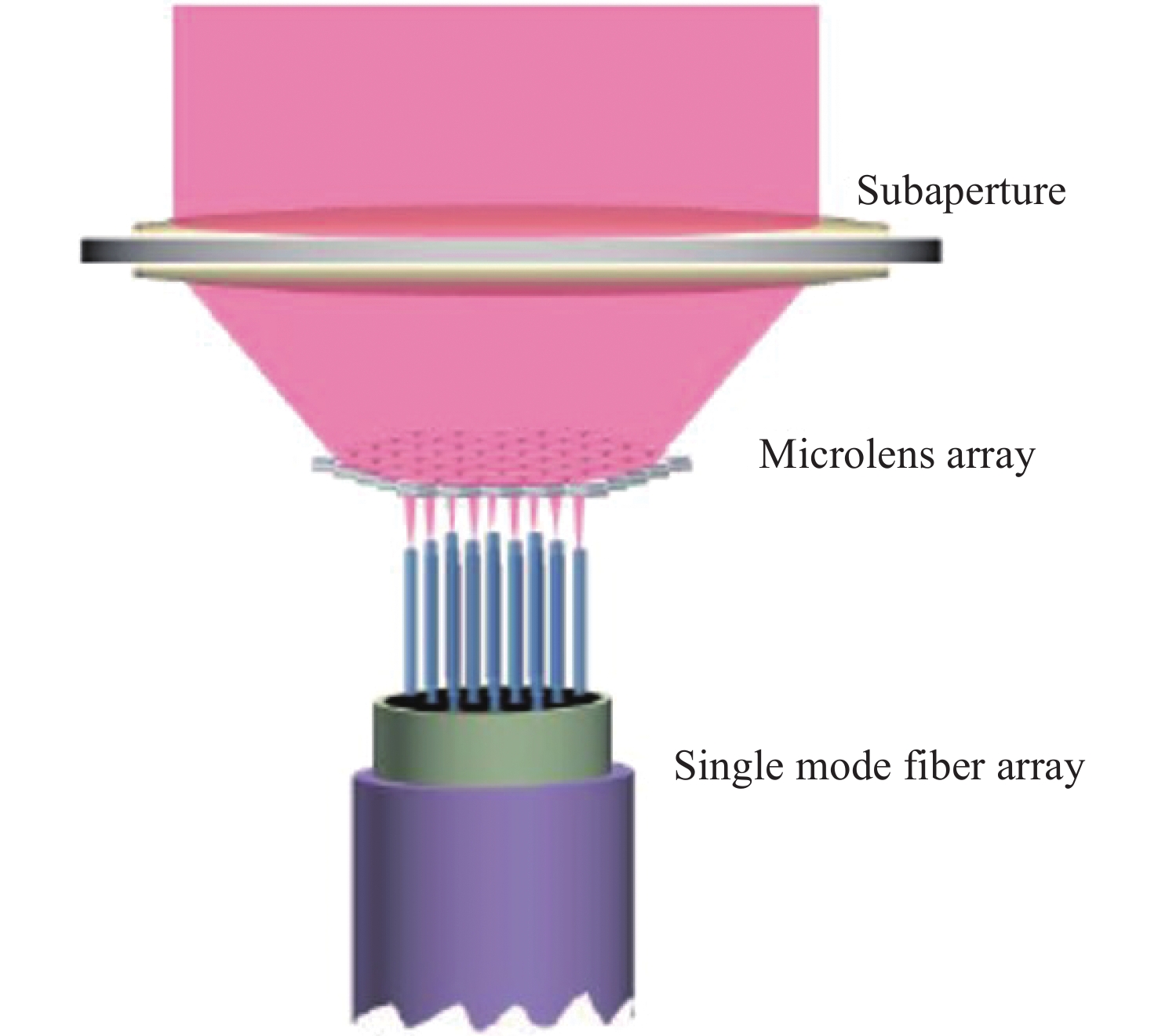
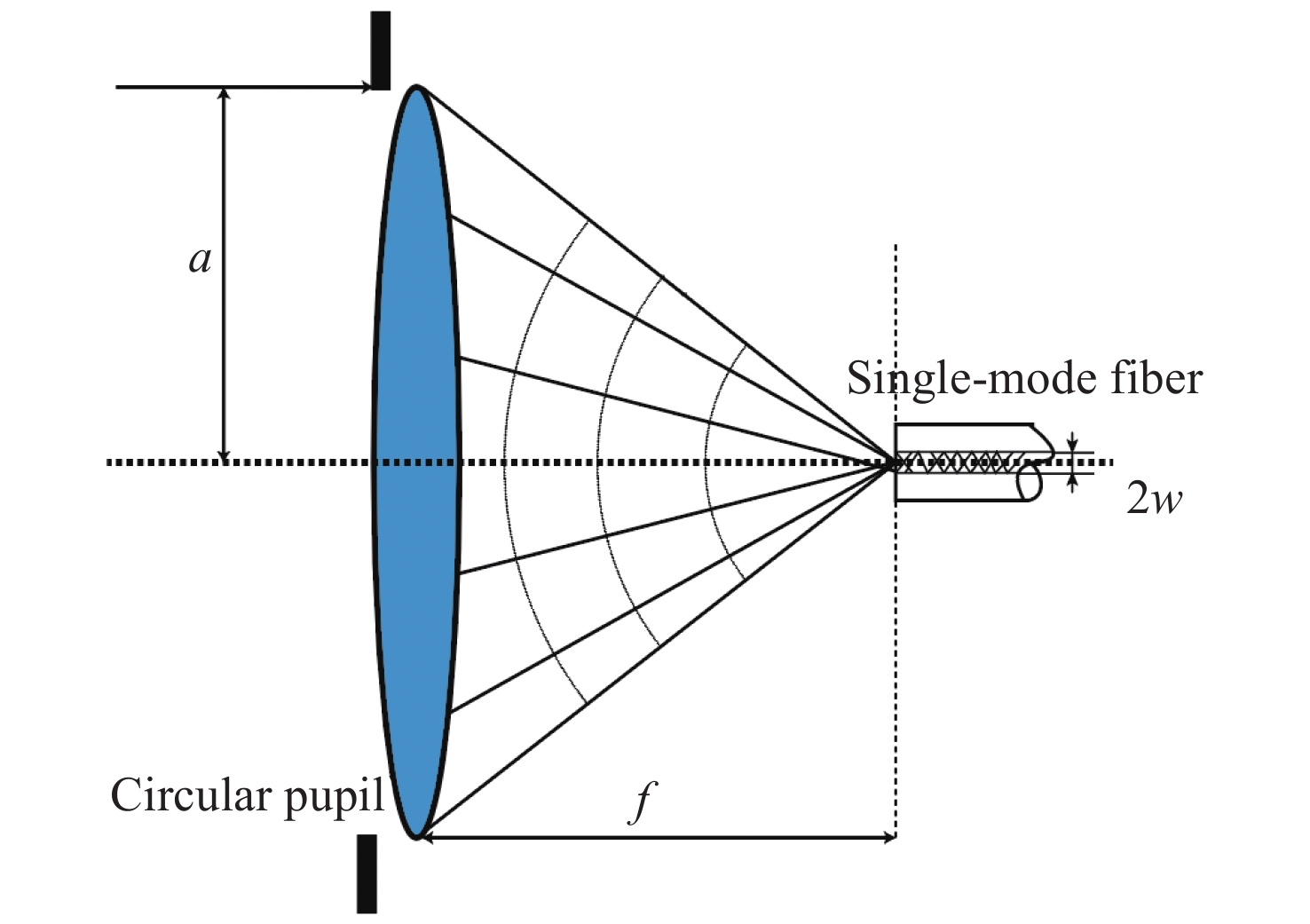
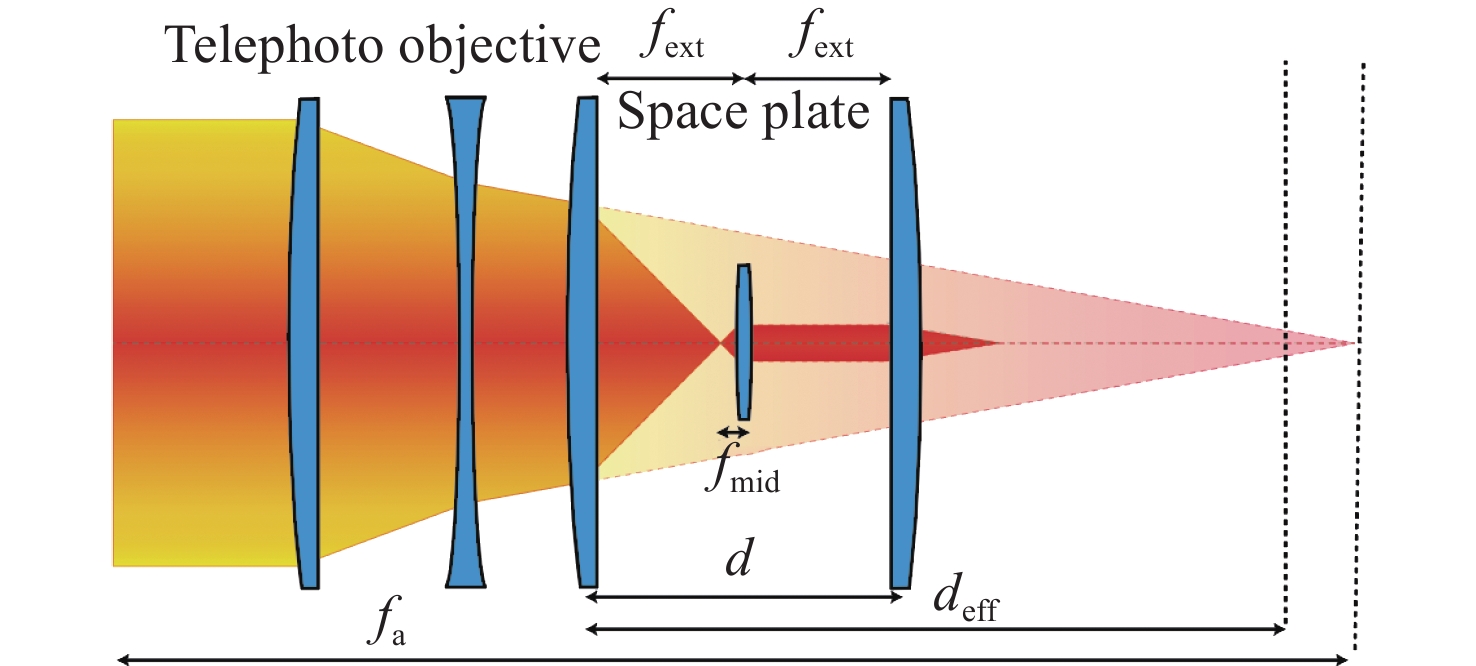
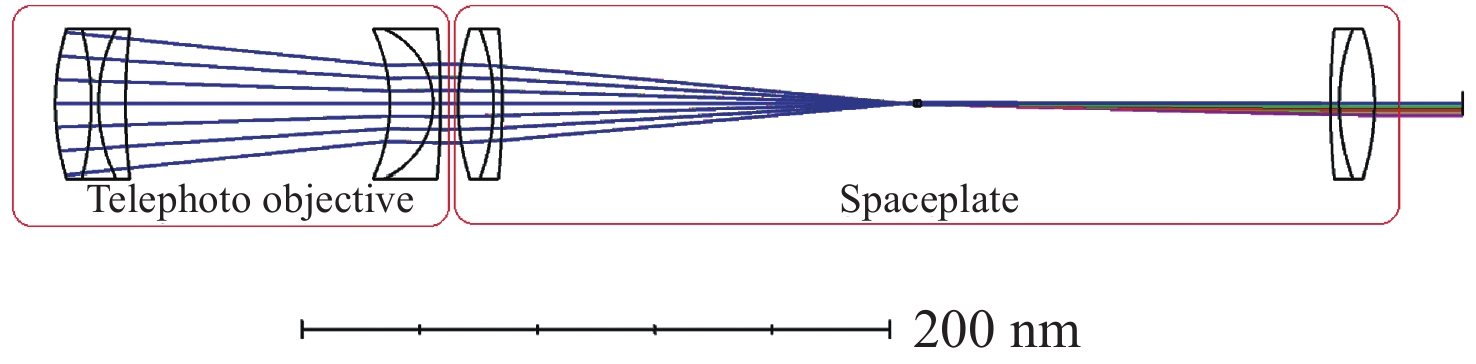
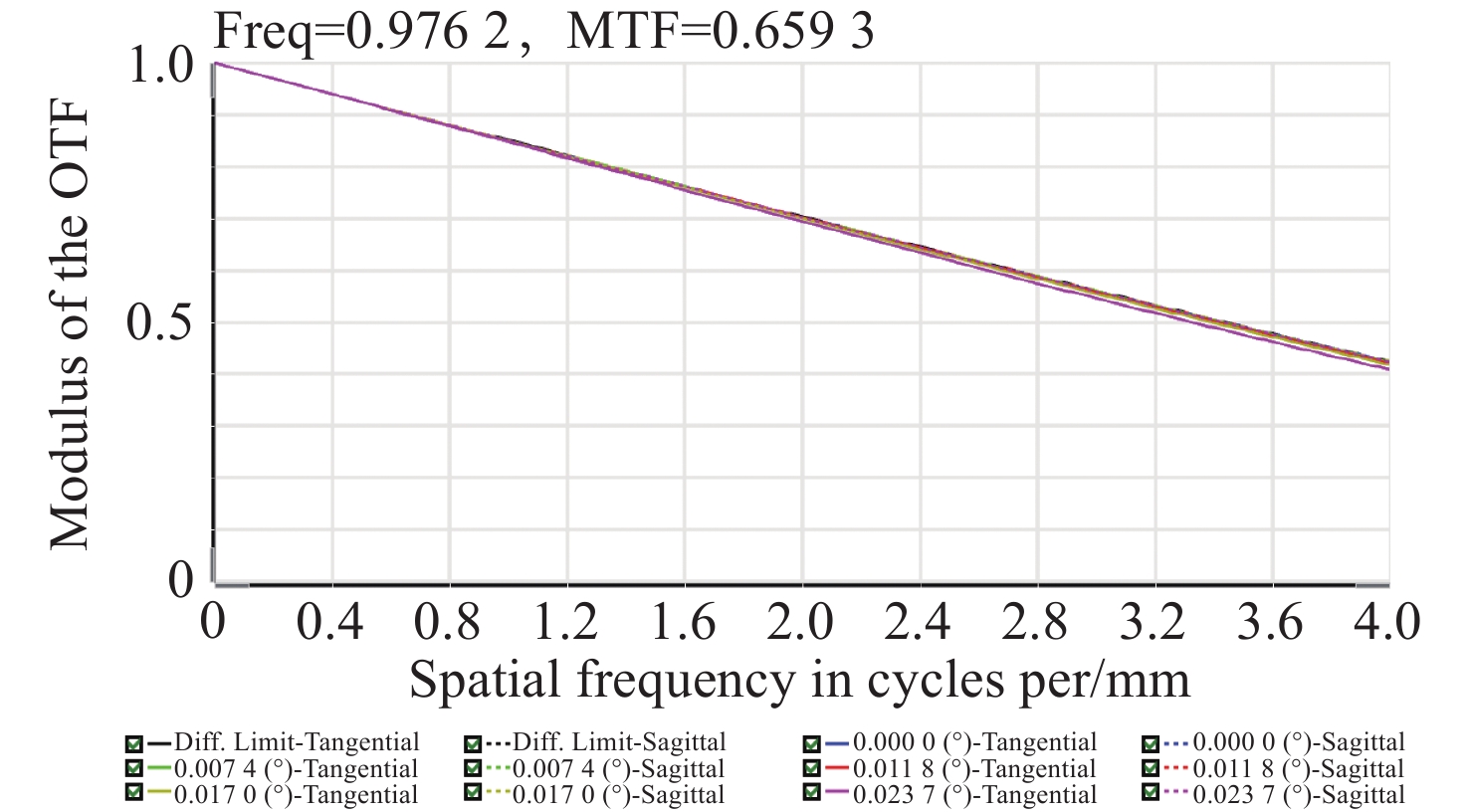
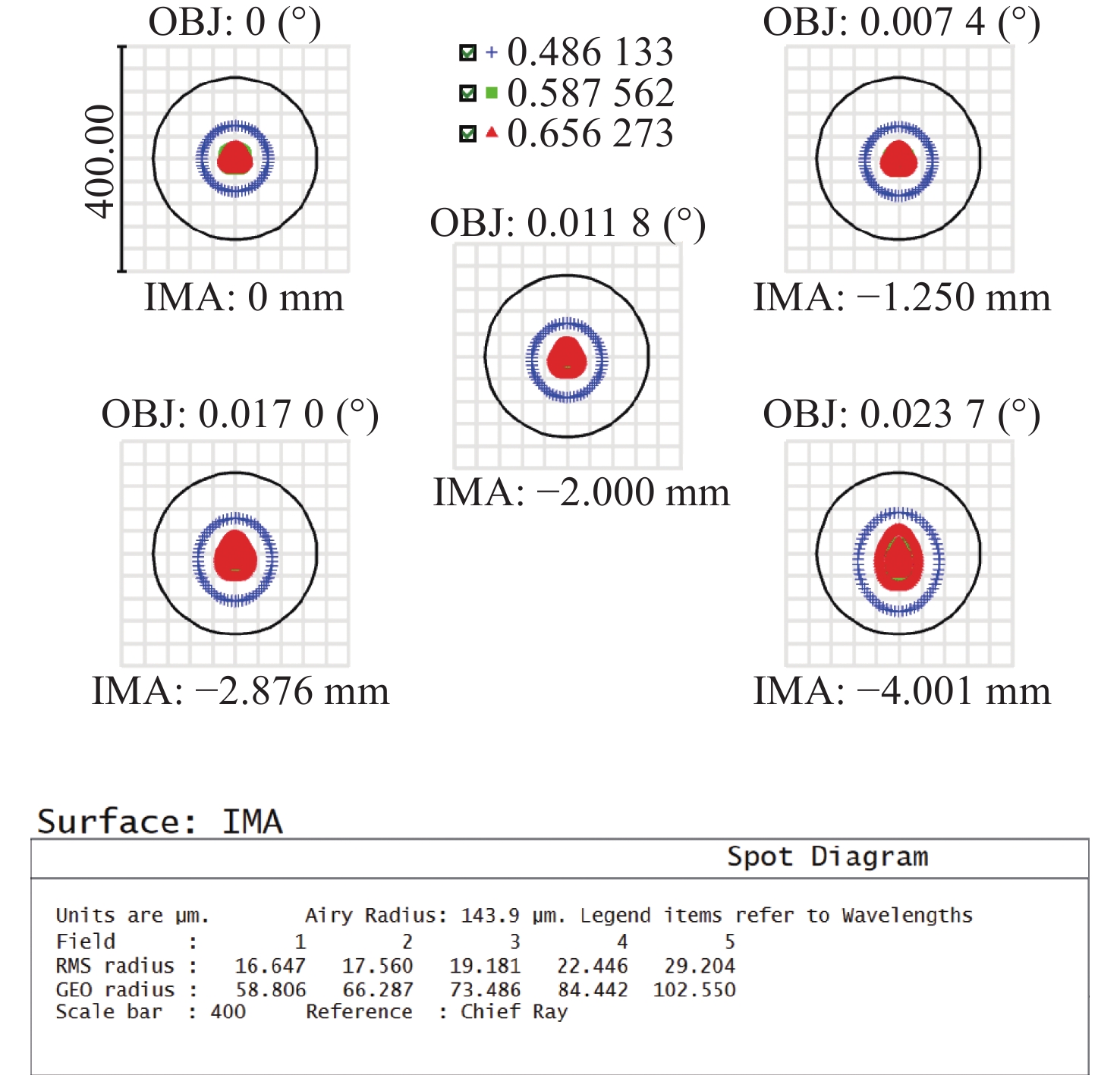
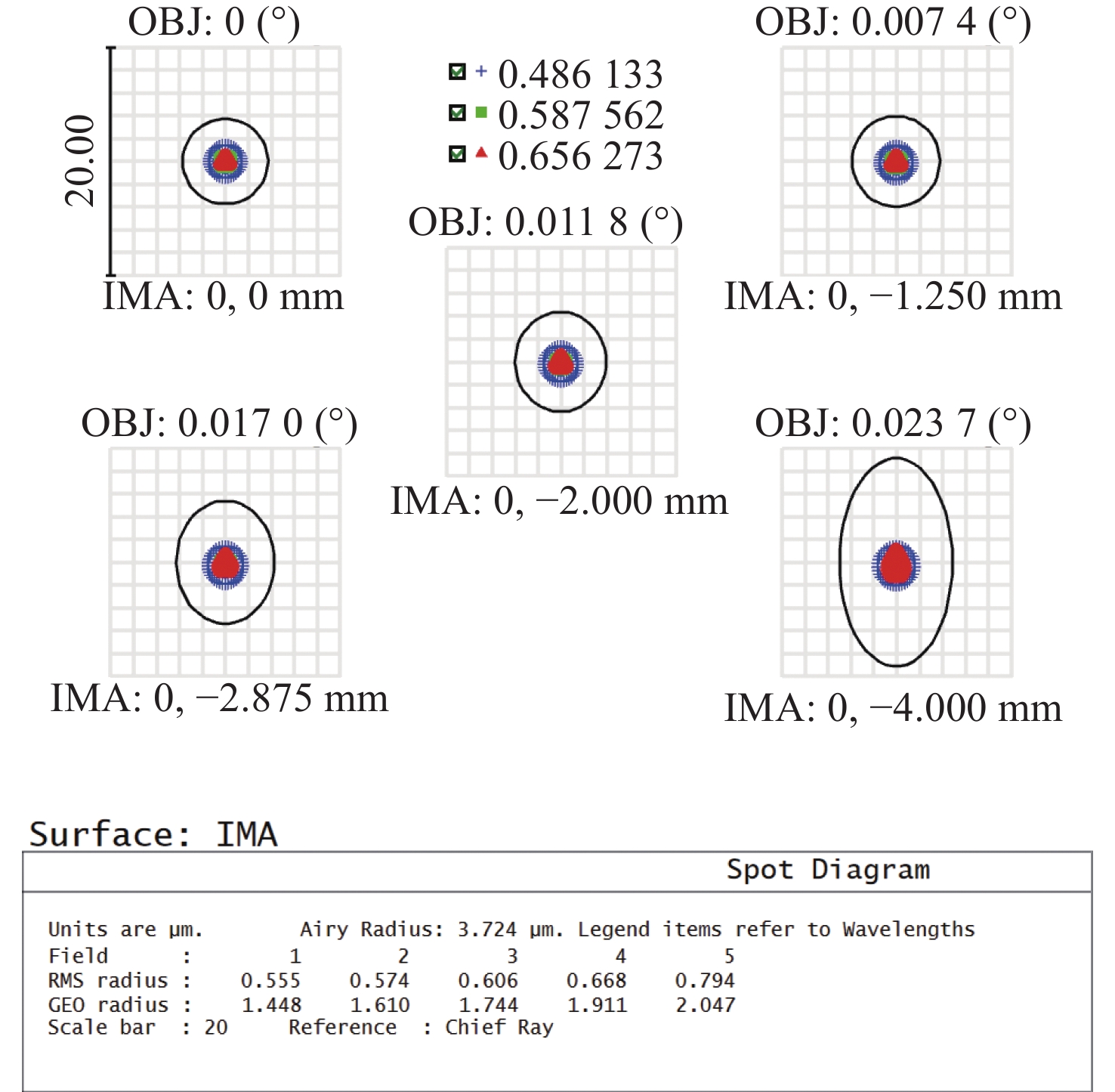
光子集成干涉成像系统一般是在子孔径焦平面处加单模光纤阵列,通过接收不同视场角的光束完成大视场拼接成像,但直接采用光纤阵列会导致成像视场不连续、子孔径焦距变长、厚度大幅度增加。针对以上问题,本文提出了一种结合微透镜阵列和光纤阵列对子孔径像面细分的方法以实现视场无缝拼接,并通过摄远物镜和三透镜空间压缩板组合大幅度降低了子孔径阵列的整体厚度。设计结果表明:通过在光纤阵列前加65×65的微透镜阵列对光束进行二次聚焦能够实现系统视场无缝拼接,视场扩大65倍后,全视场为
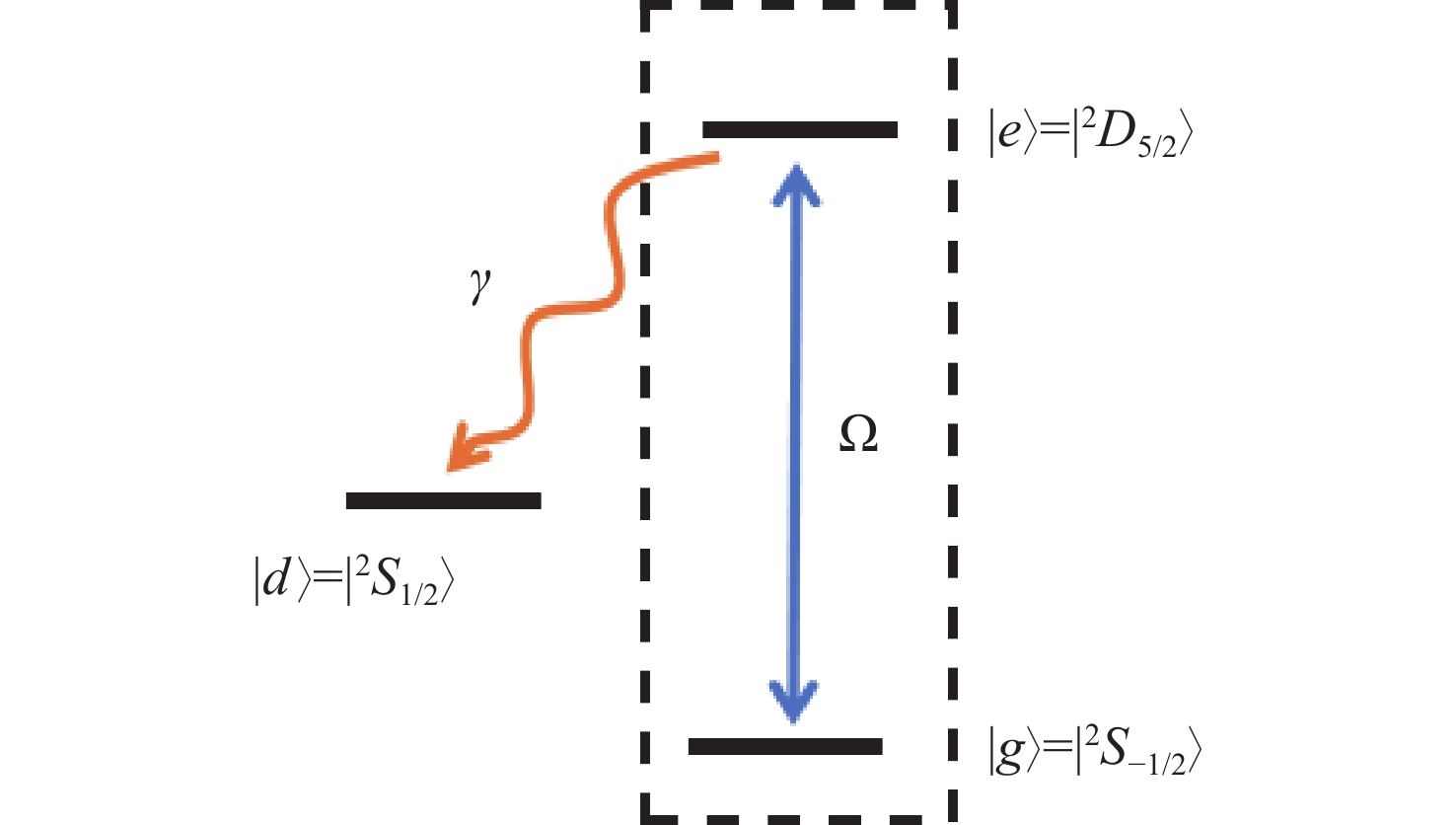
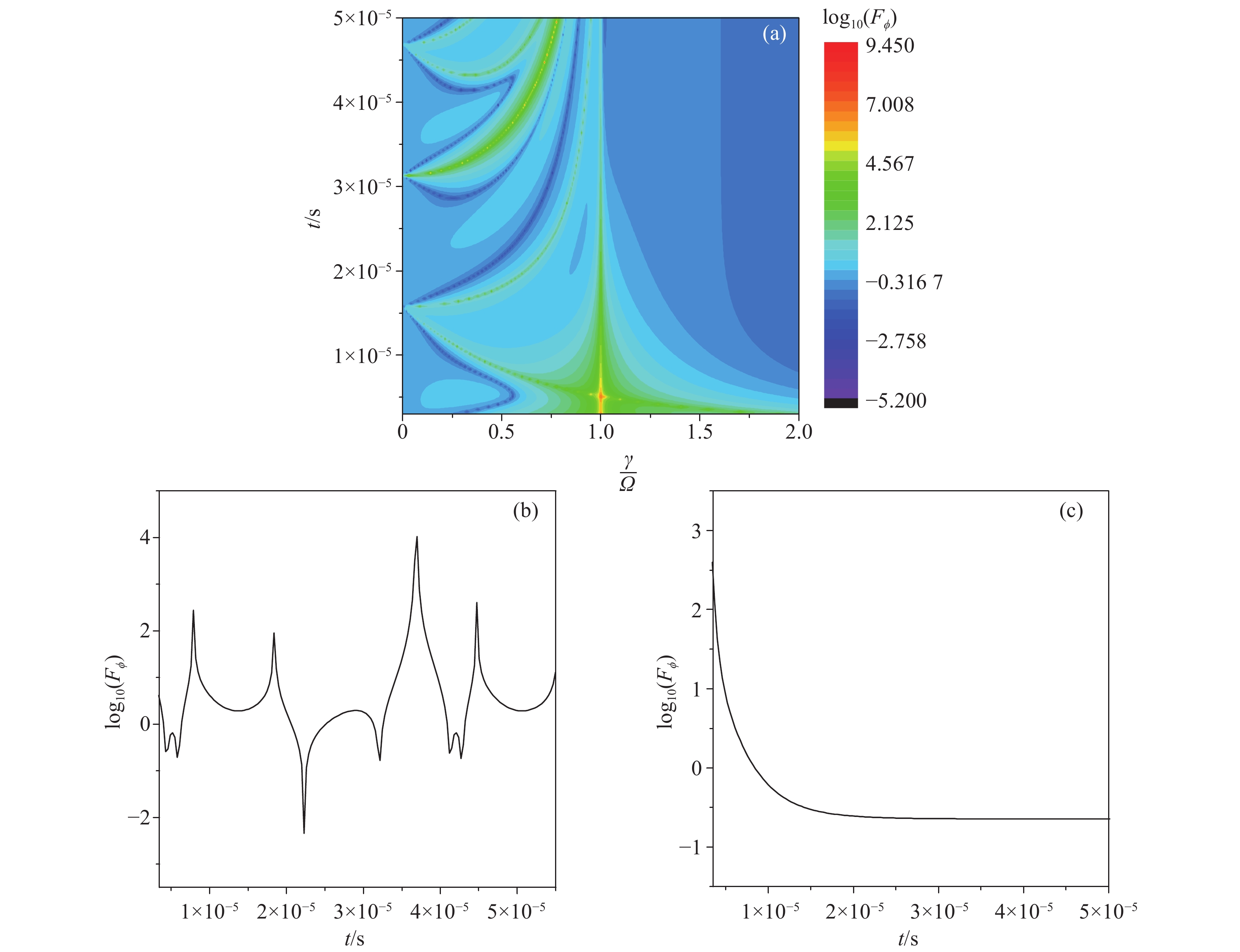
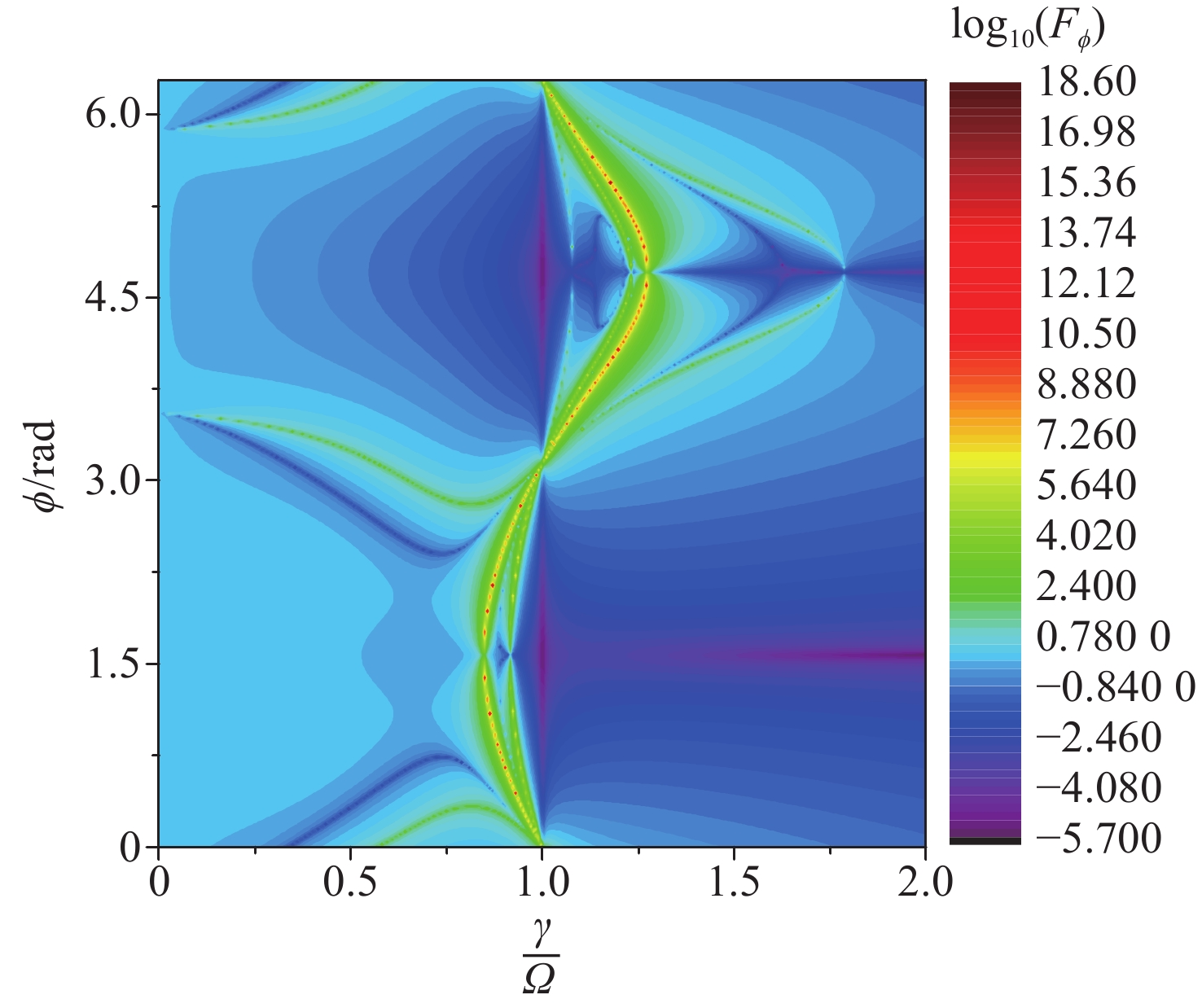
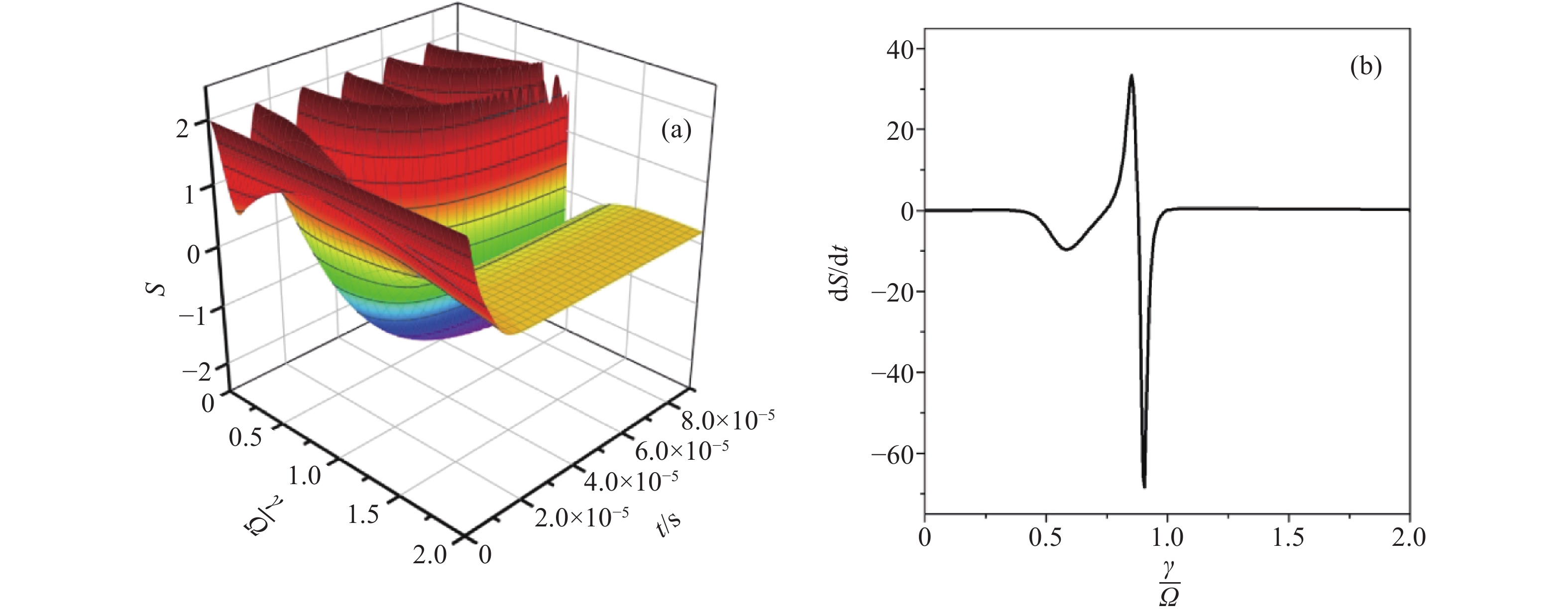
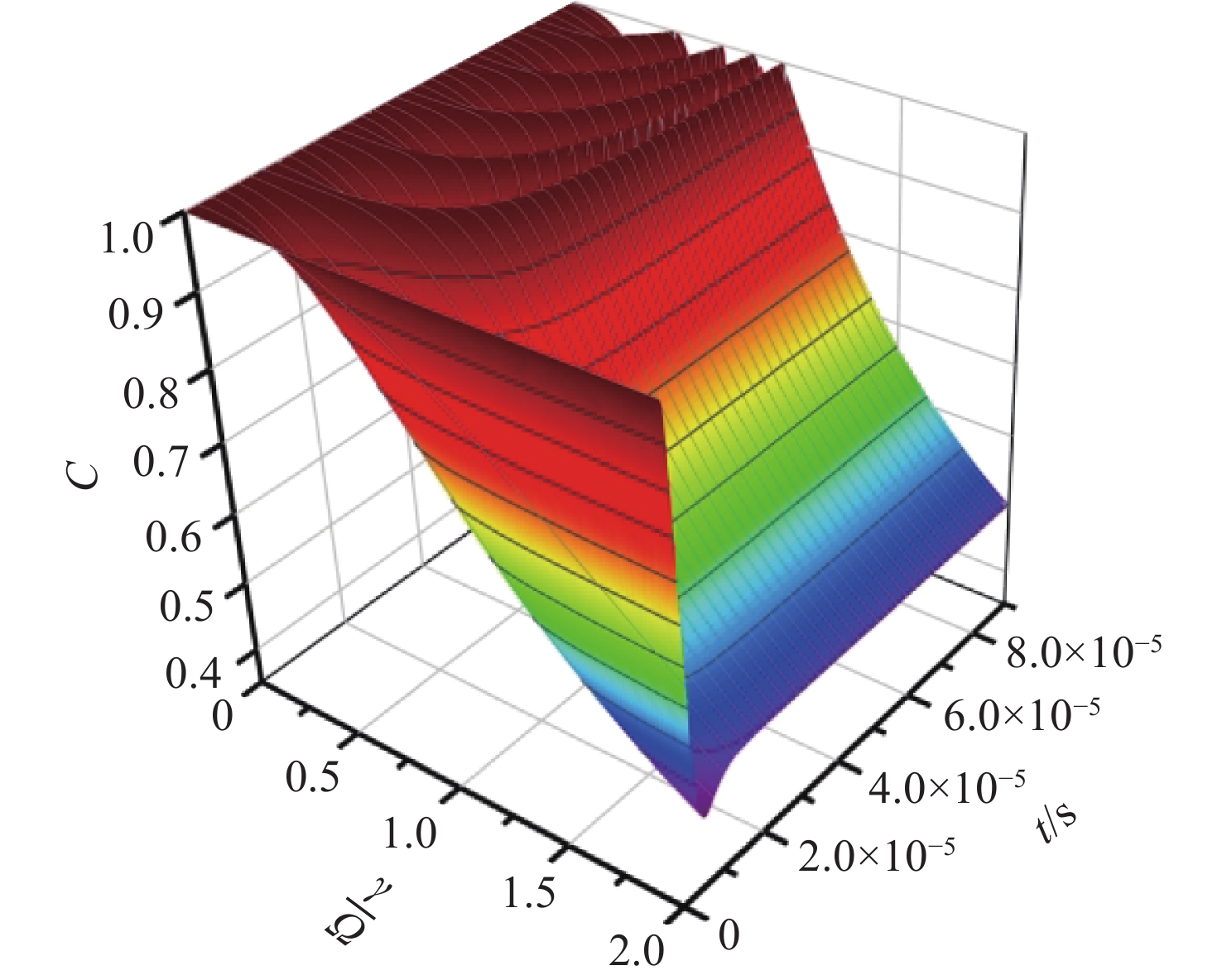
本文以具有增益损耗平衡的非厄米离子阱系统为研究对象,从量子参数测量角度,利用量子Fisher信息量标度非厄米系统的量子相变特征。通过态矢量映射方法,研究了任意两能级非厄米量子系统的一般非幺正演化规律。量子Fisher 信息量的动力学演化在奇异点附近发生突然变化,并定量表征系统的量子临界现象。根据系统物相是否具有宇称和时间反演对称特性,可以获得两种不同行为的演化过程。在对称相区域中,量子Fisher 信息量随时间呈现振荡特征,可获得较高的测量精度。在对称性被破坏的相区域里,它的含时变化经历单调递减过程。这两种动力学行为也被量子熵和量子相干证实。强调了利用量子Fisher信息来见证非厄米离子阱系统的相变。这些结论有助于非厄米量子信息技术发展。
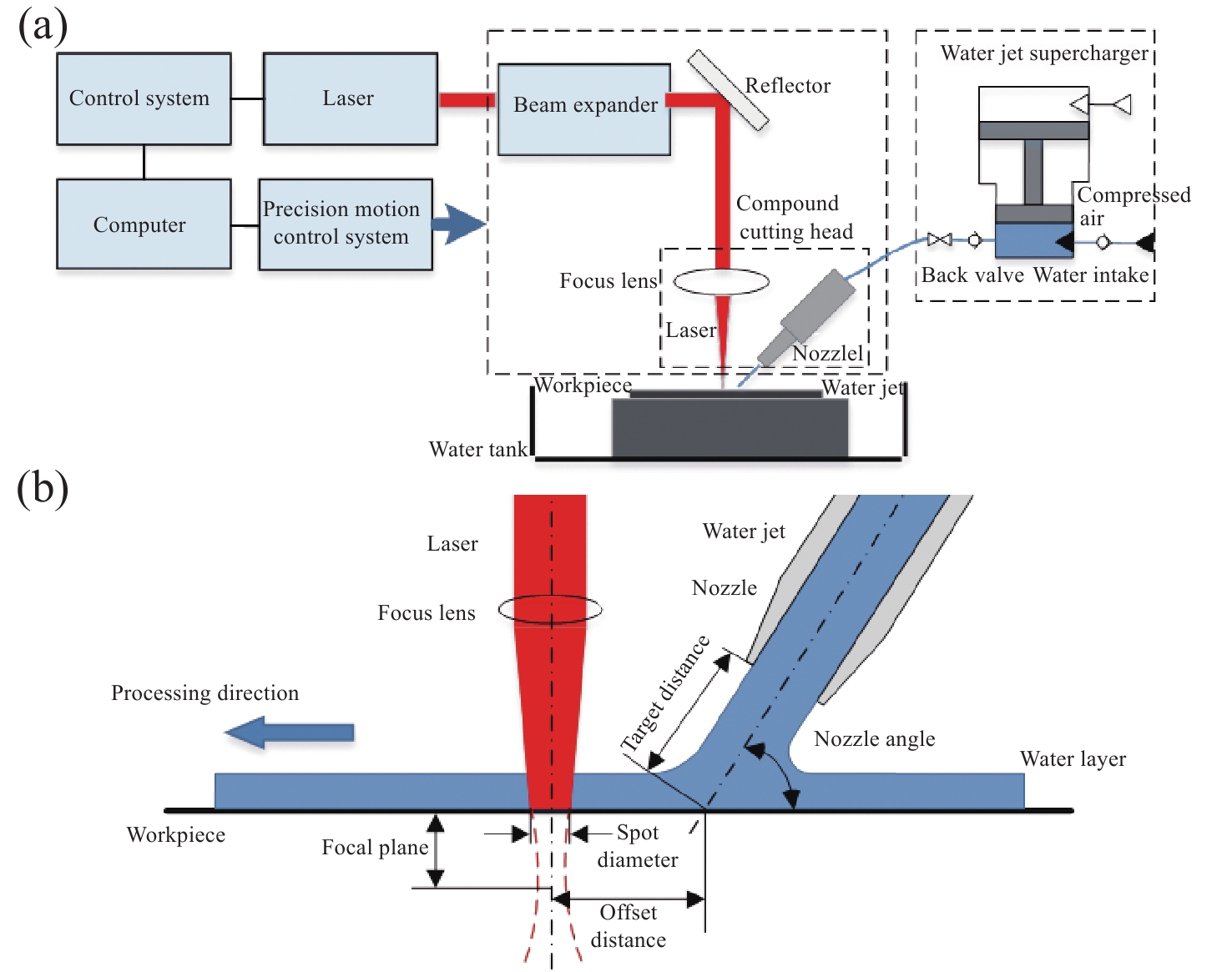
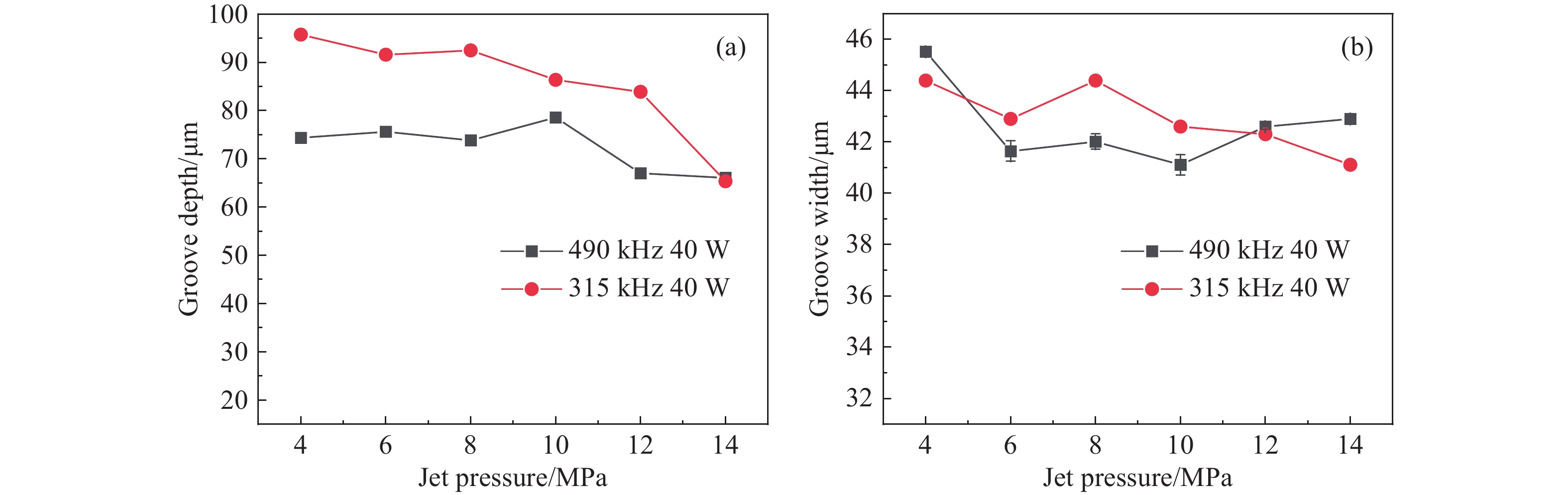
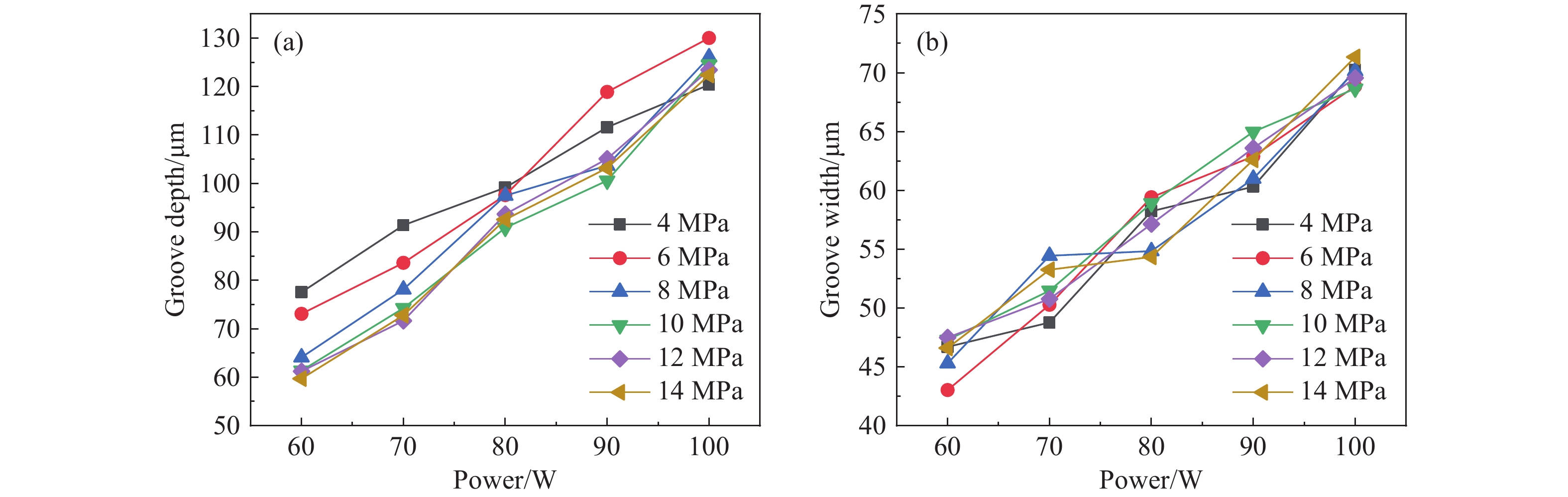
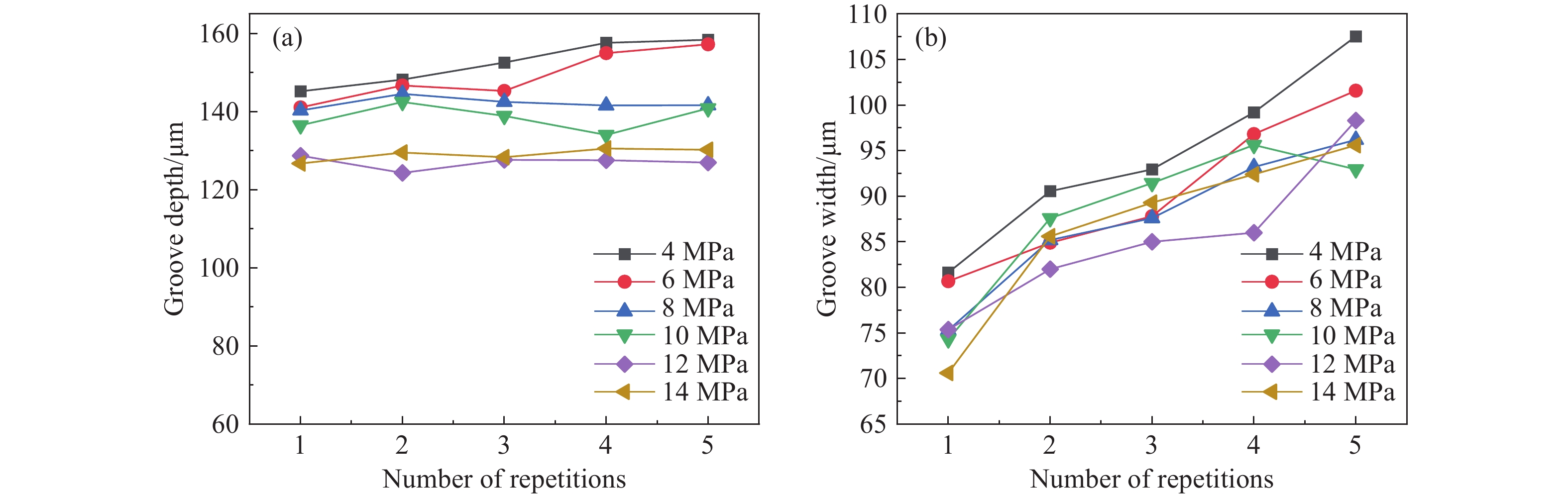
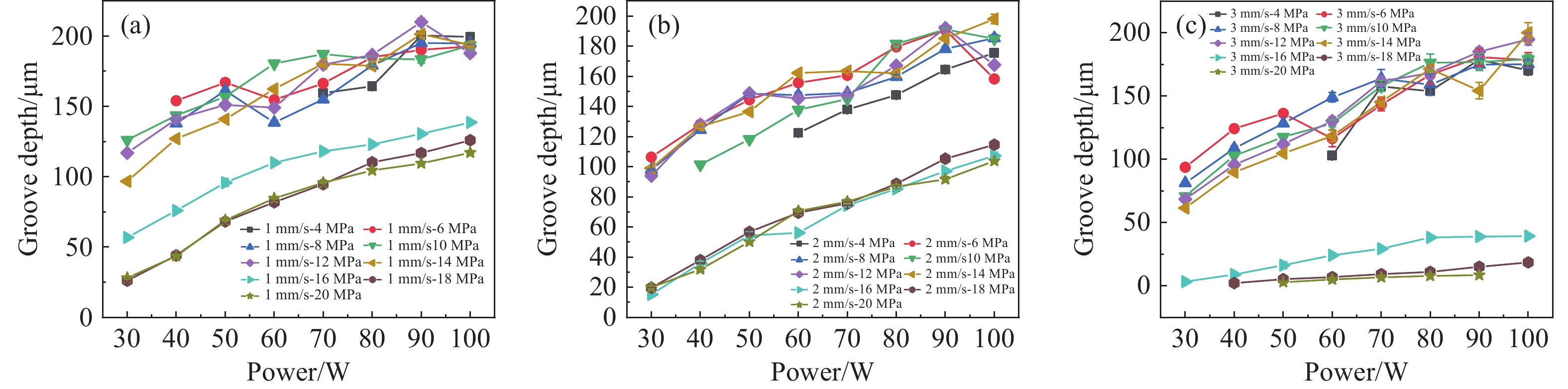
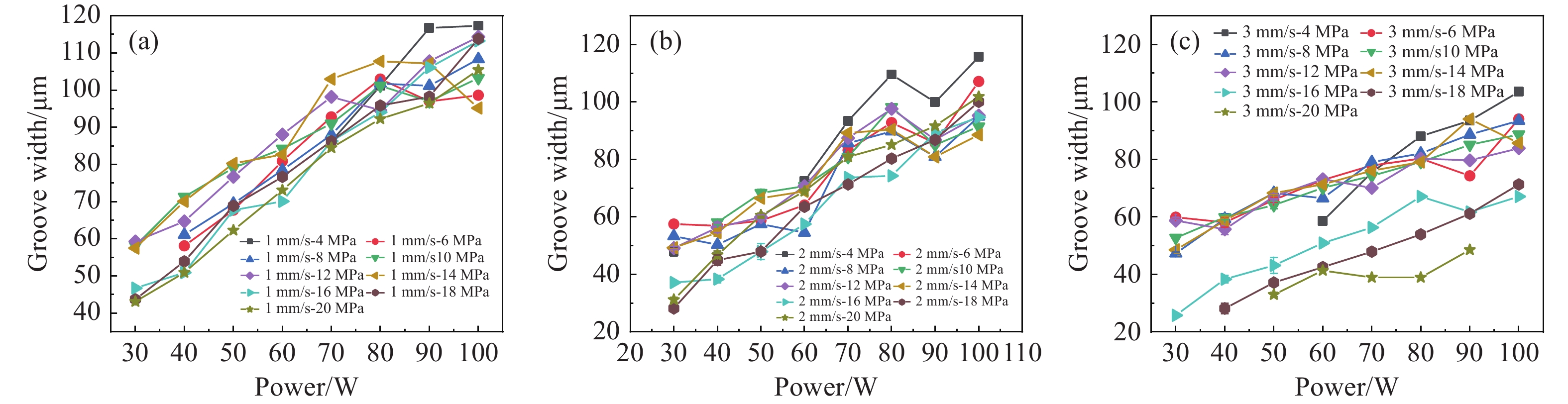
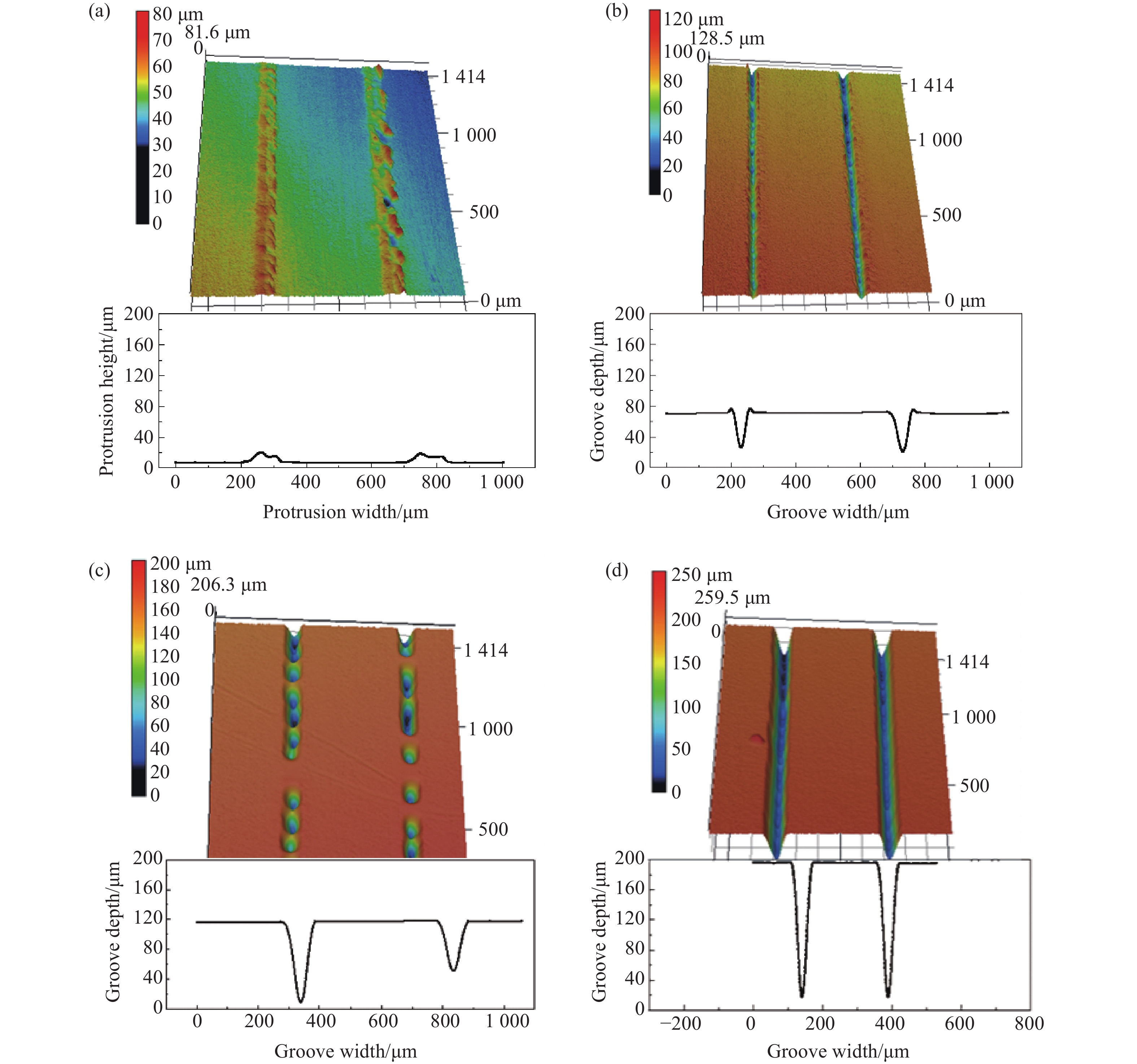
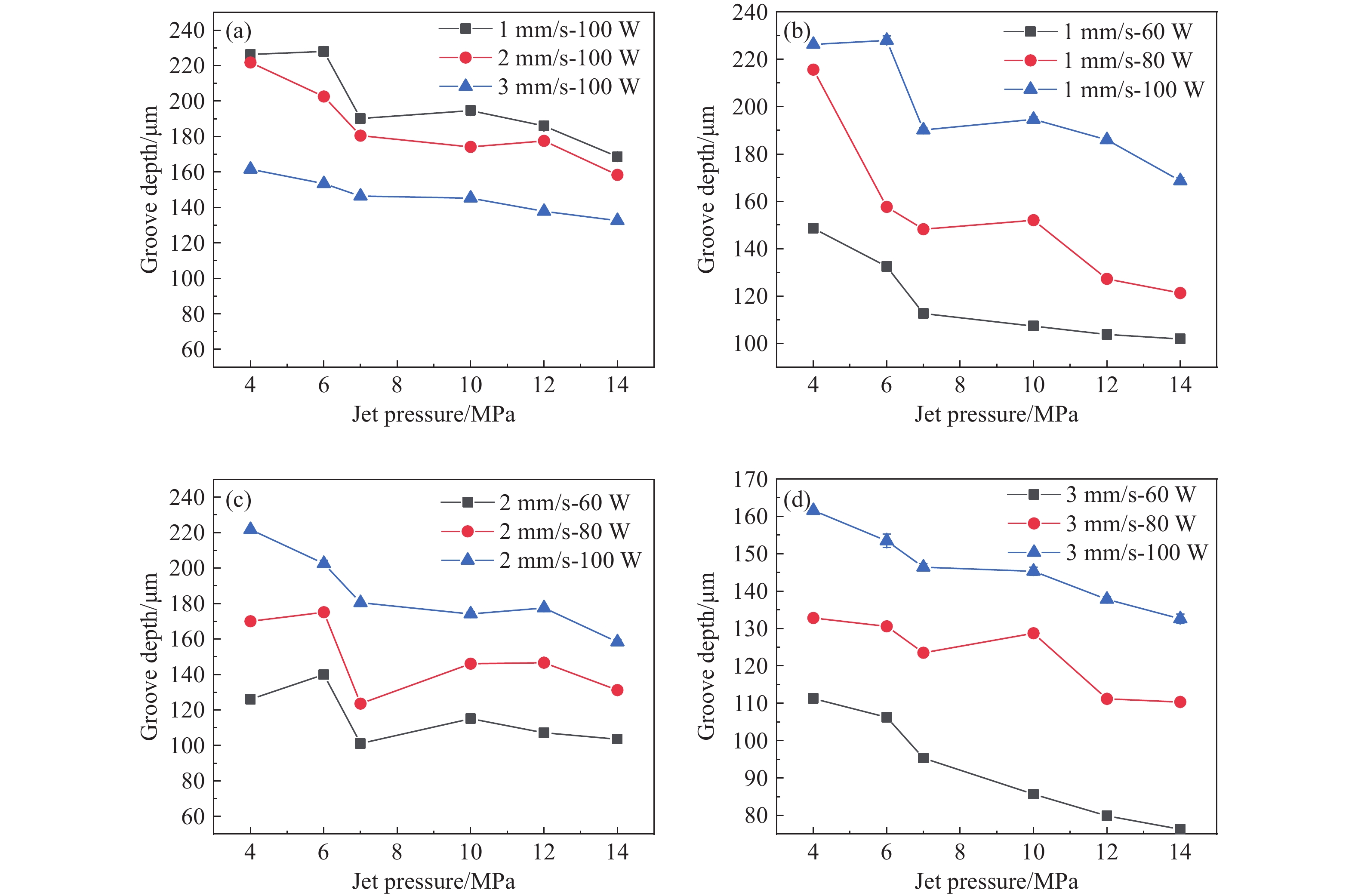
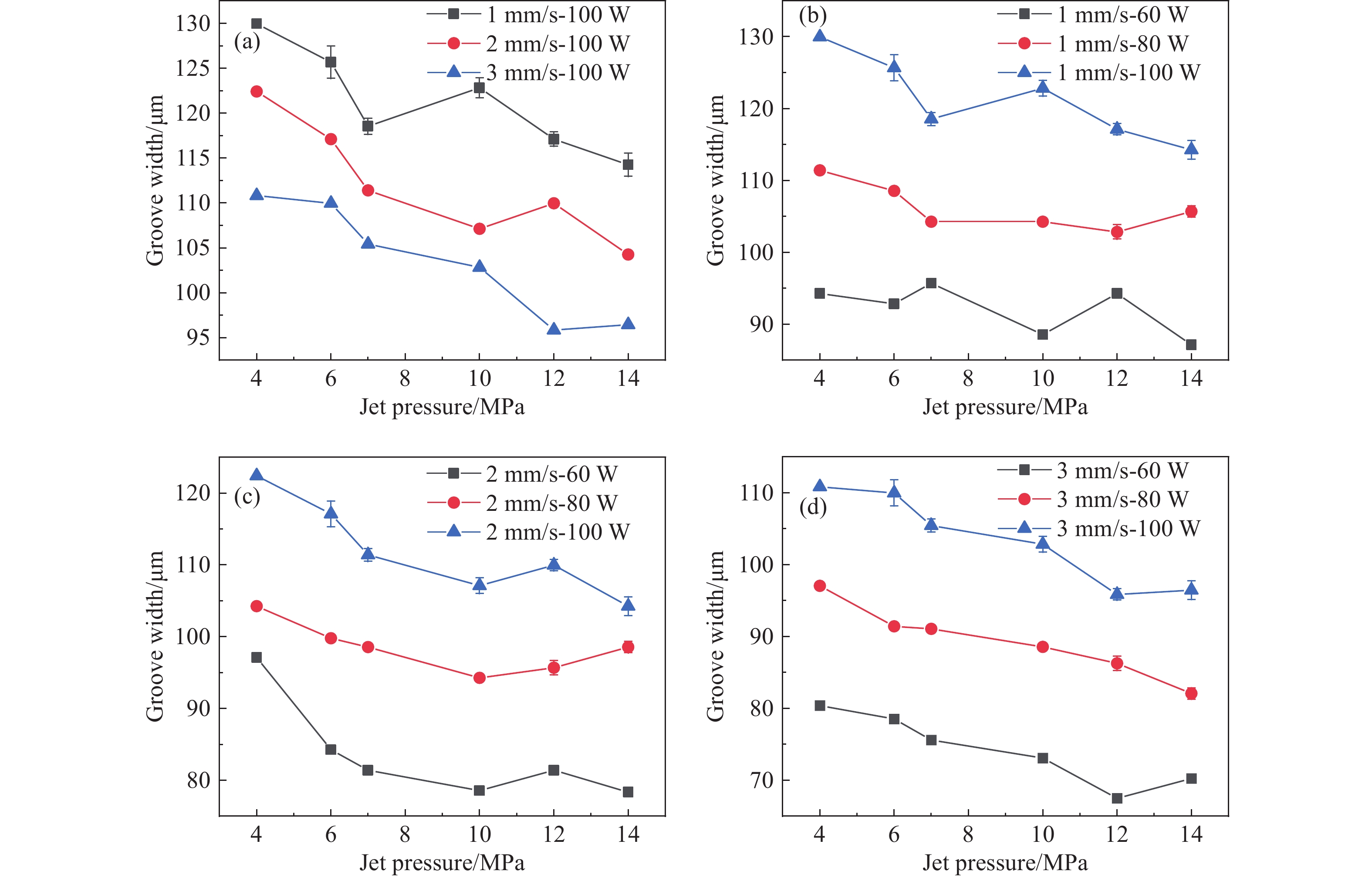
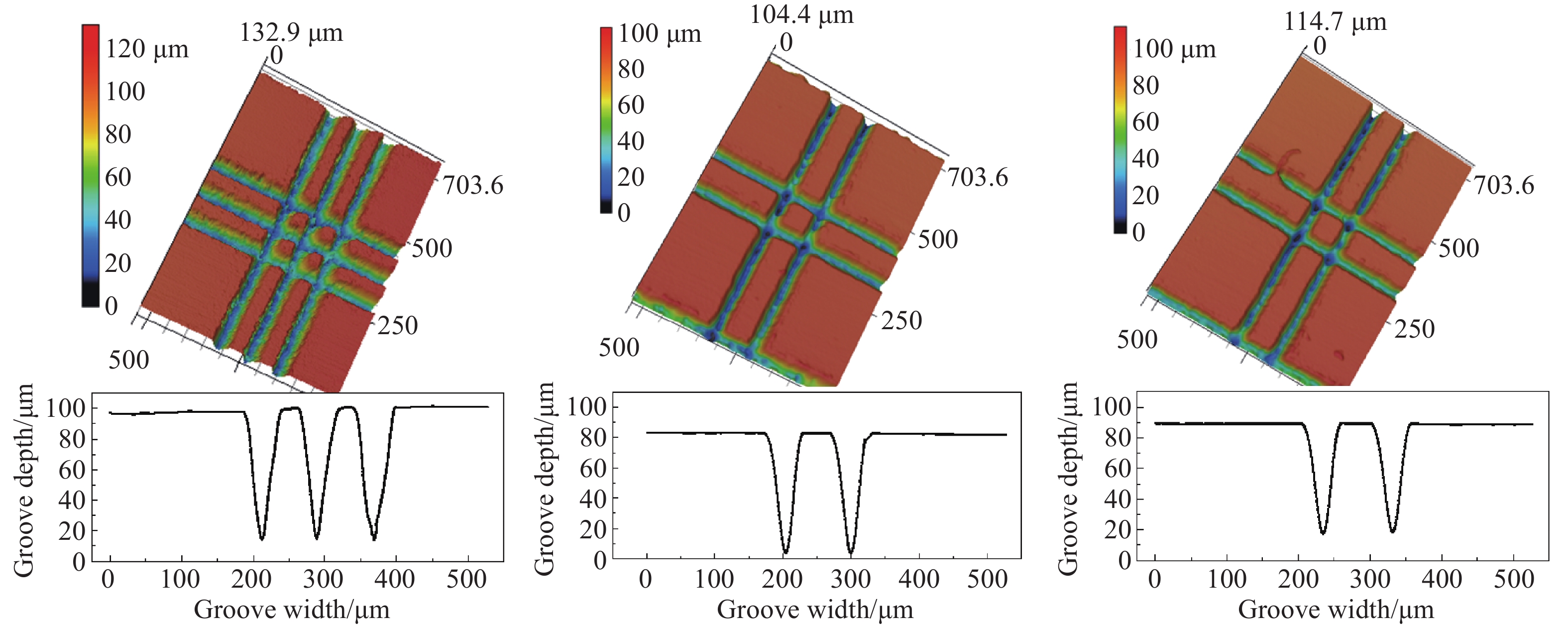
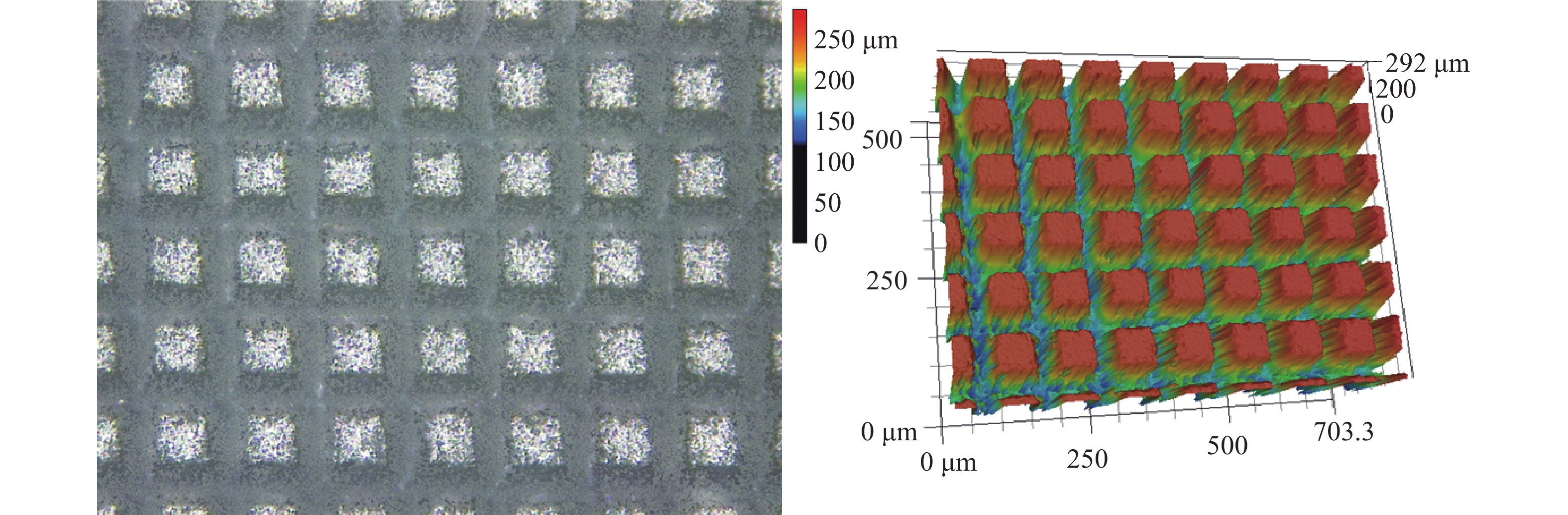
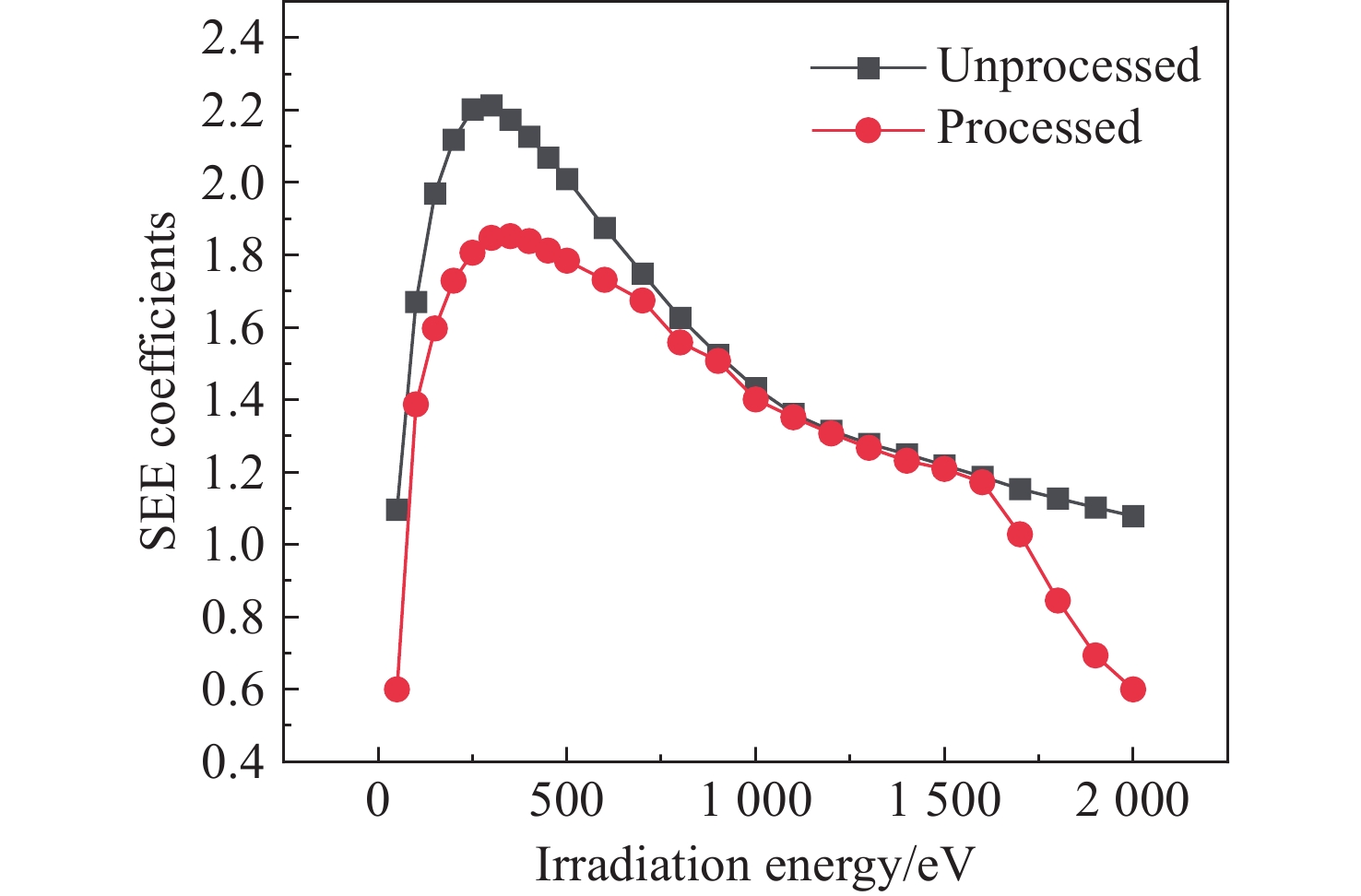
金属表面二次电子发射的抑制对于提高粒子加速器的稳定性、发射度及寿命具有十分重要的作用,已成为新一代加速器面临的最为关键的问题。本文采用激光辅助水射流技术在粒子加速器组成的重要材料316L不锈钢表面开展了高质量微陷阱结构的加工研究。系统分析了激光重复频率、脉冲宽度、平均功率、射流压力、重复次数、水射流偏置距离、焦平面位置、槽间偏置距离和加工速度对316L不锈钢表面形貌、槽深、槽宽和“井”字陷阱结构形貌的影响规律。研究结果表明:微槽深度随激光功率增加而增大,随射流压力增加而减小,随加工速度增加而减小,受重复次数影响较小;槽宽随激光功率增加而增大,随加工速度增加而减小,随重复次数增加而增大。通过参数优化,可以加工得到尺寸规整且表面质量较高的“井”字陷阱结构。本研究测试了“井”字结构的二次电子发射系数,较加工前最大降低了0.5,有效抑制了二次电子发射。本研究结果对于构建材料表面微陷阱结构具有非常重要的应用参考,激光辅助水射流加工技术有望应用于金属表面二次电子抑制加工。
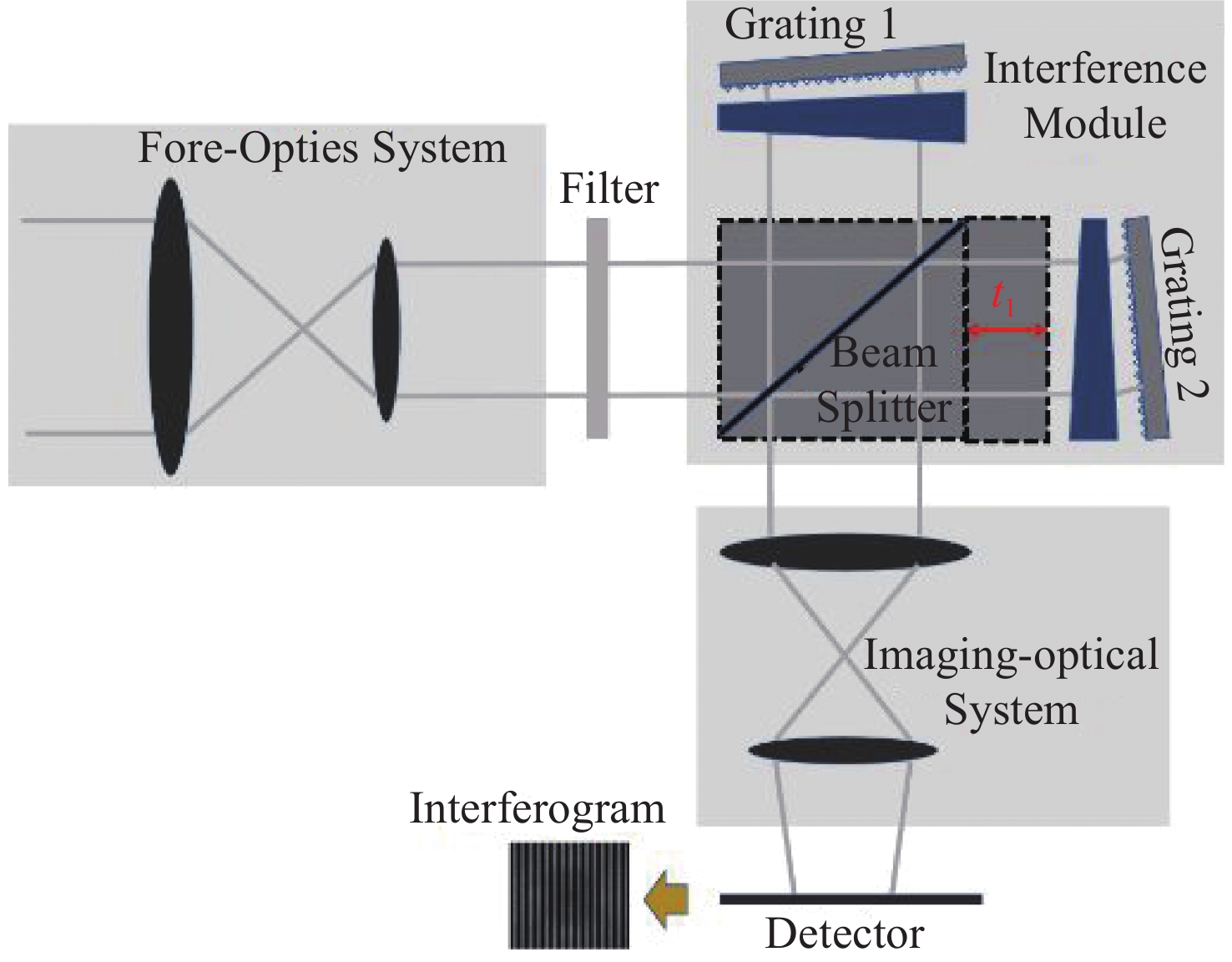
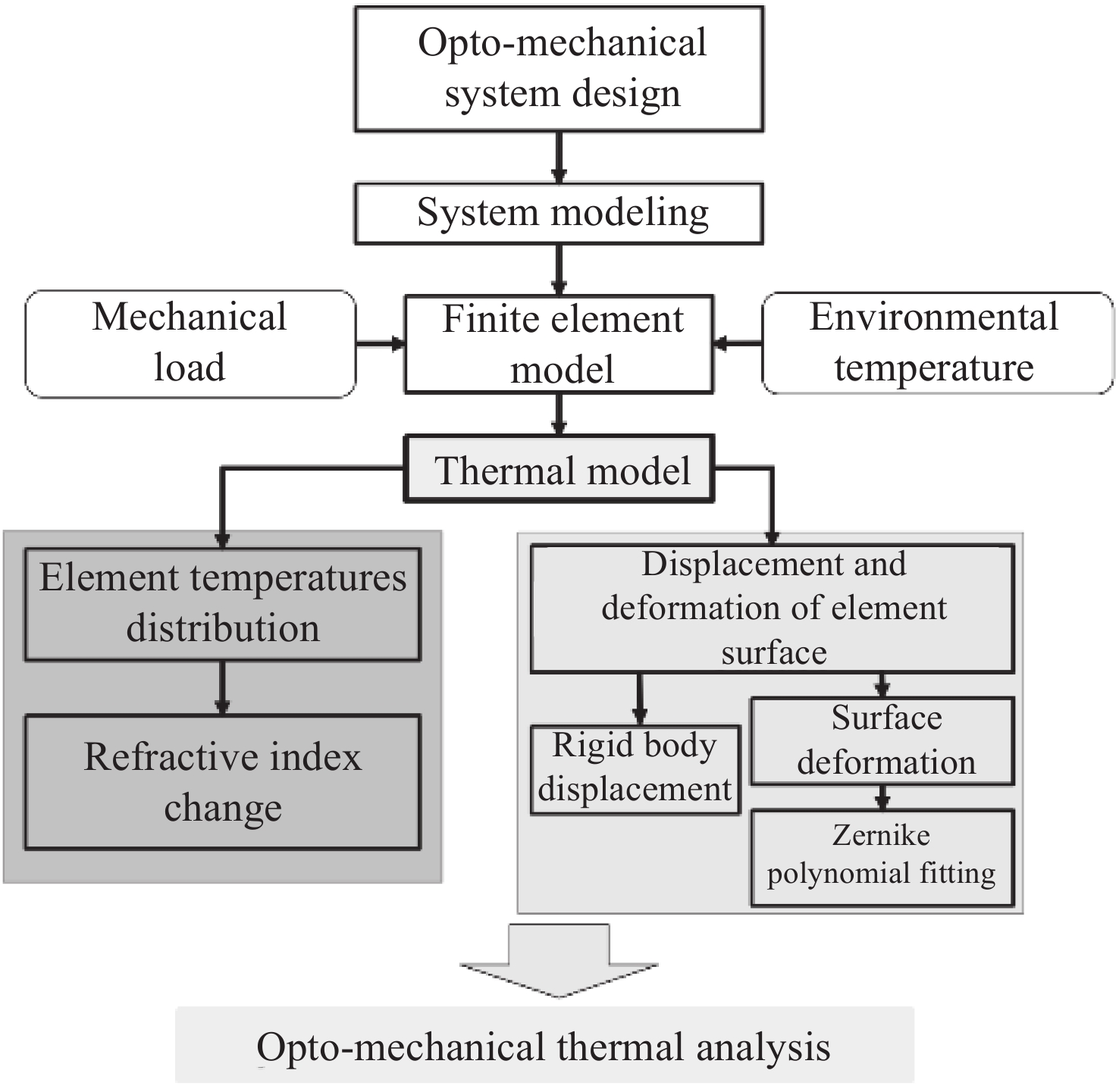
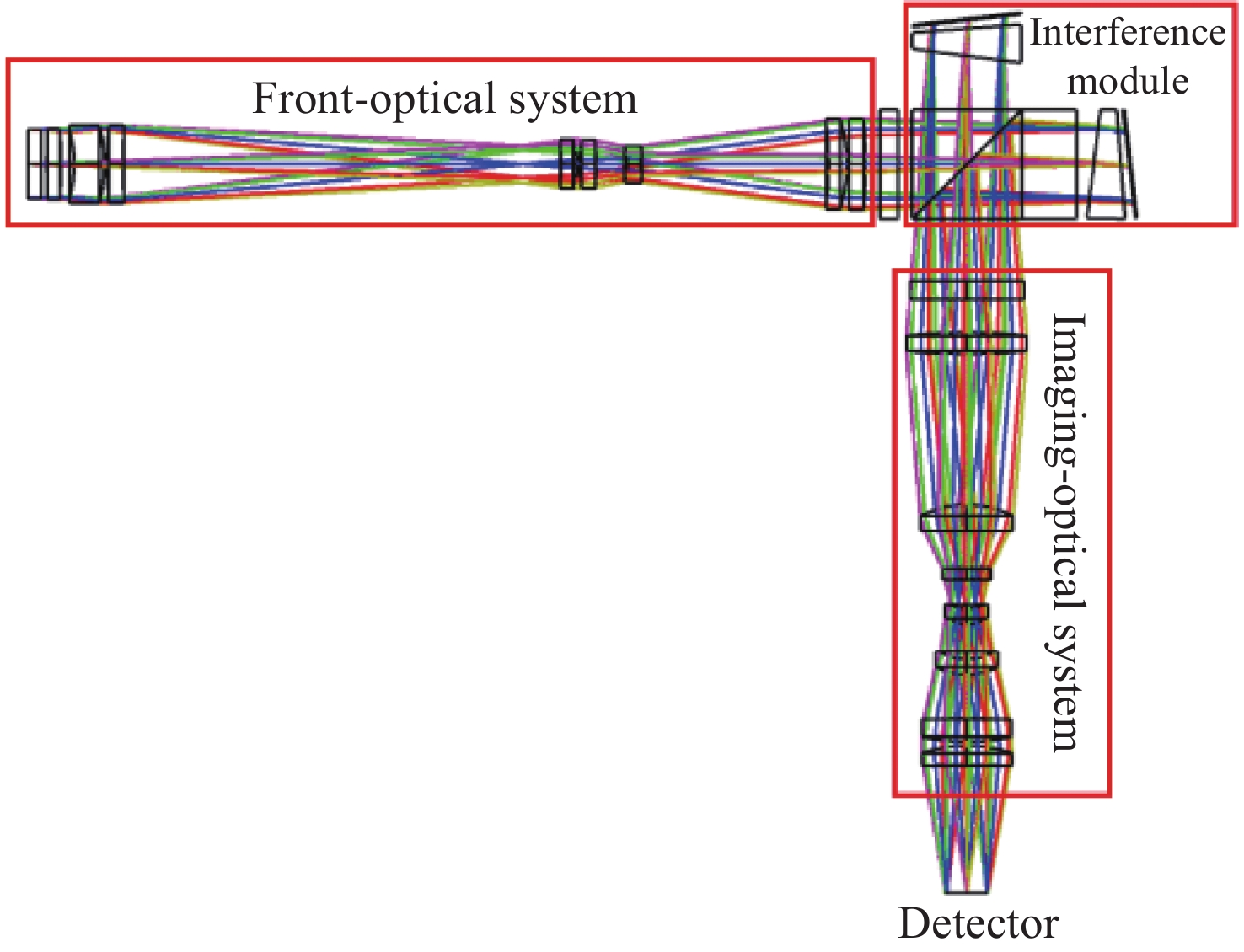
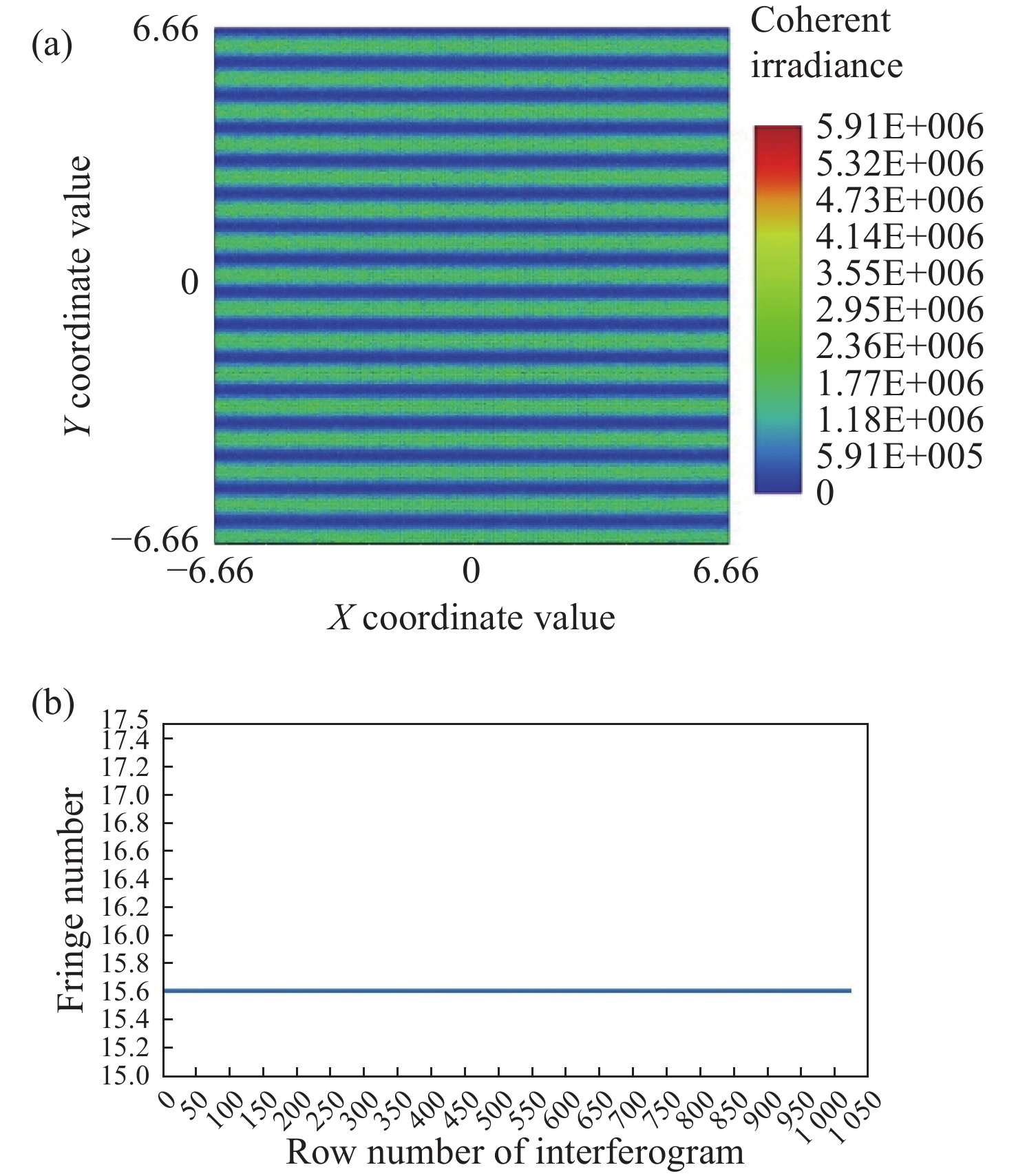
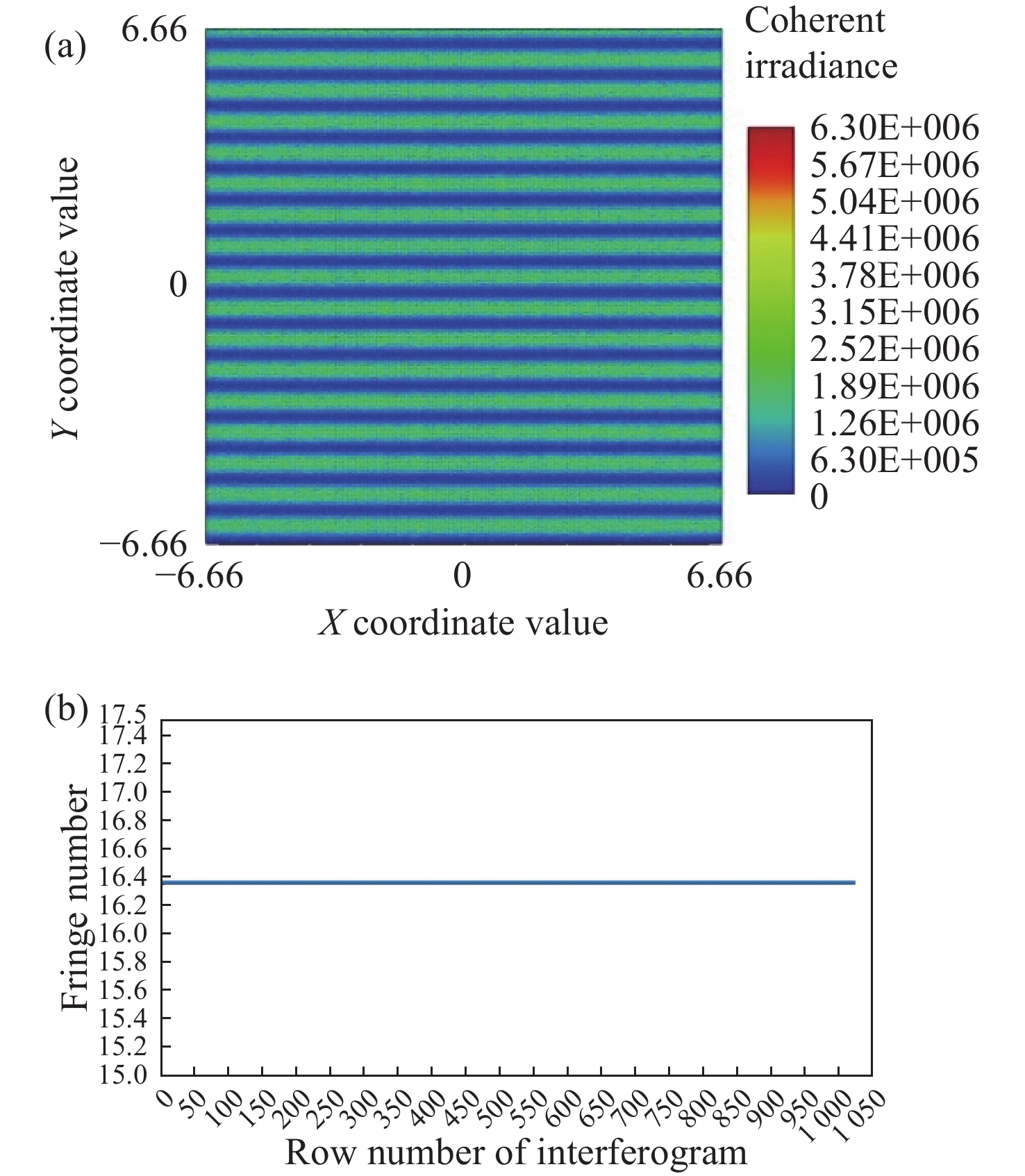
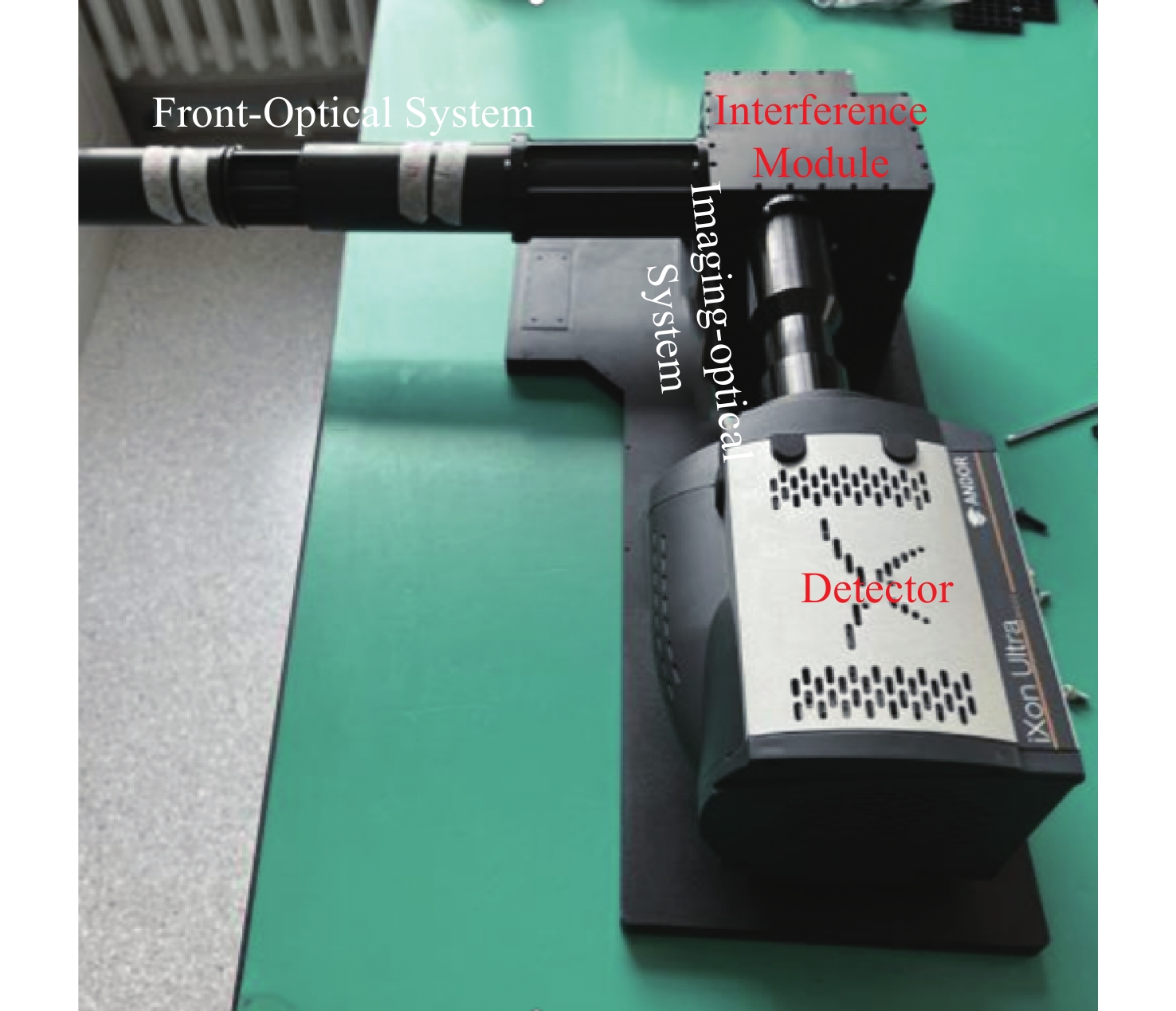
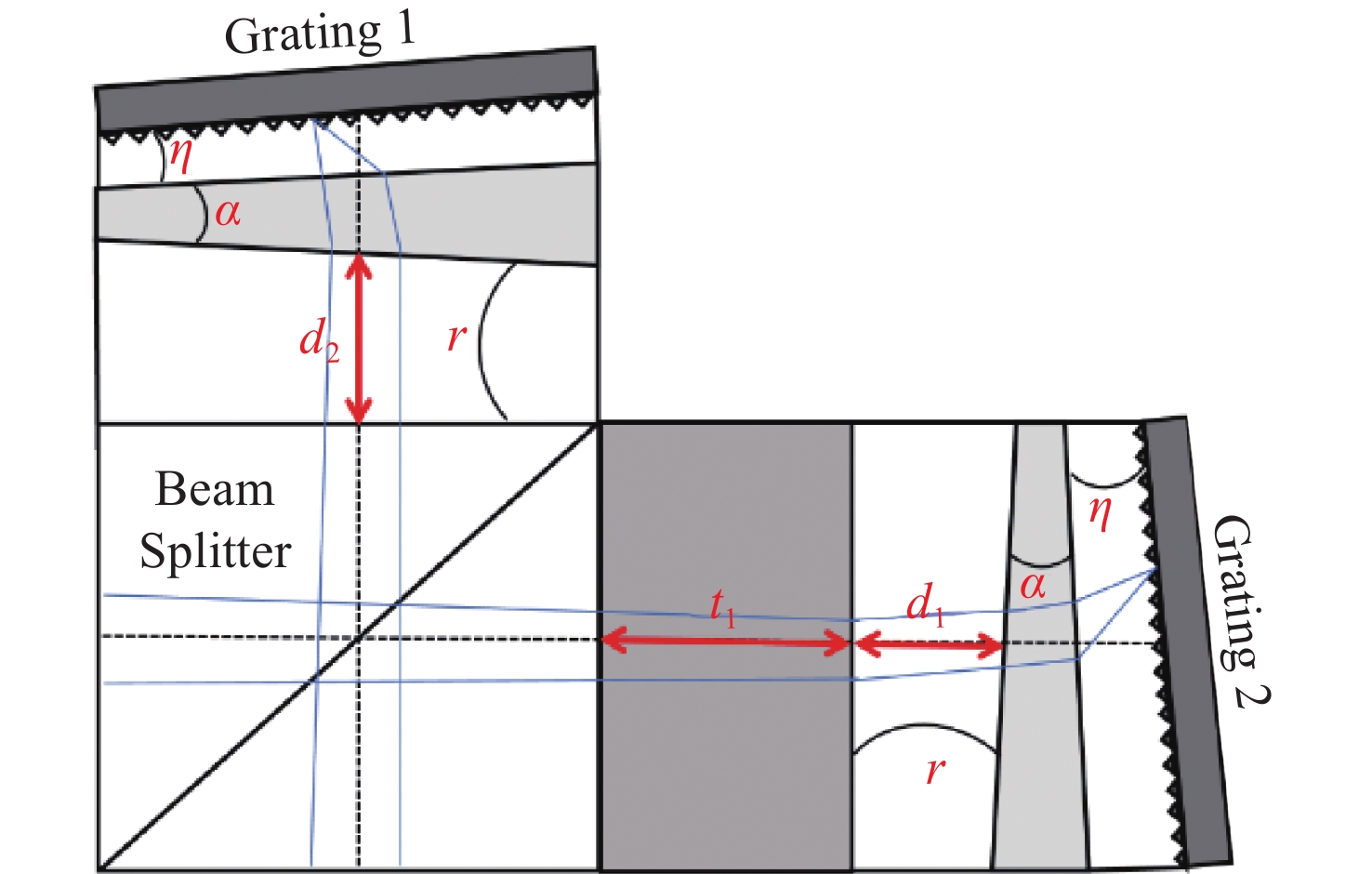
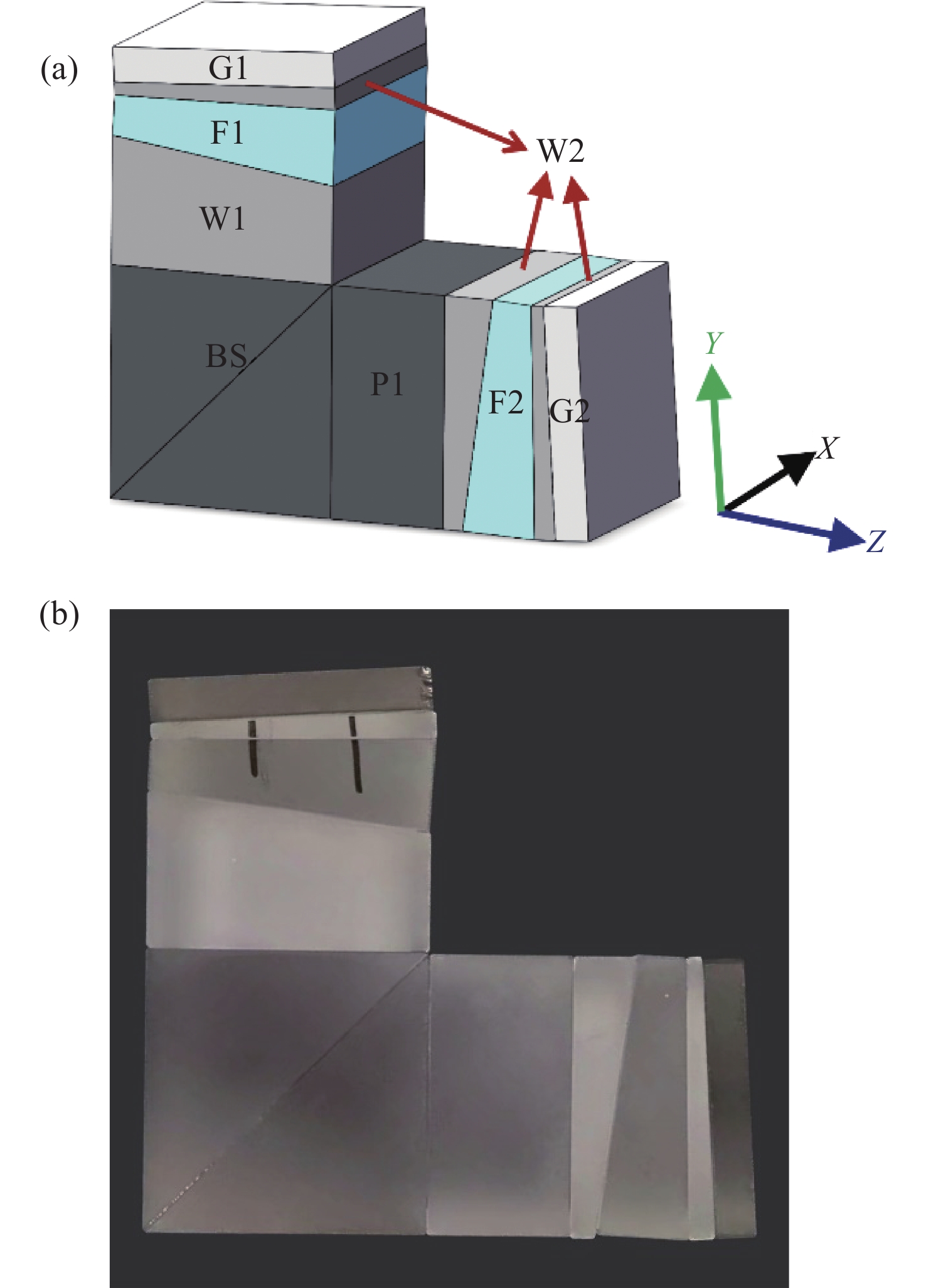
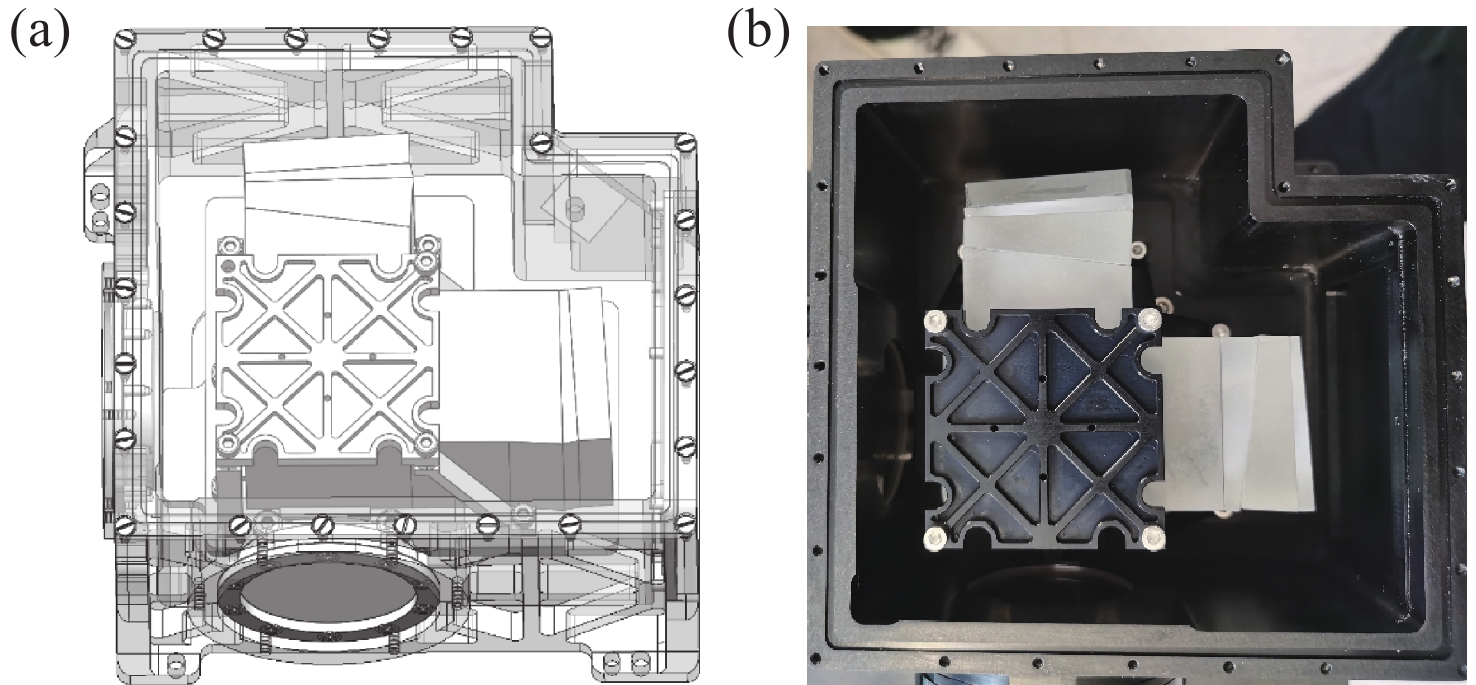
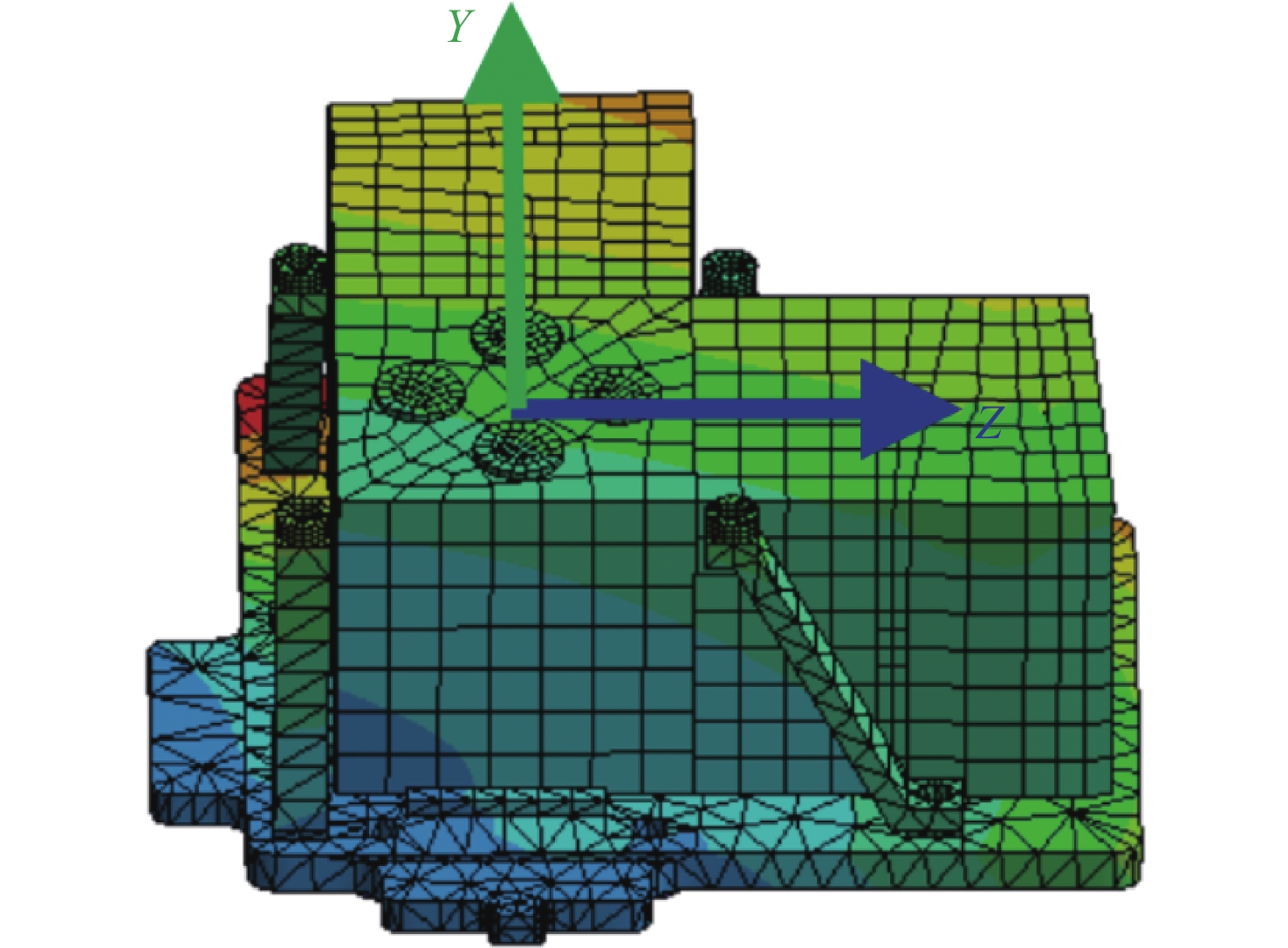
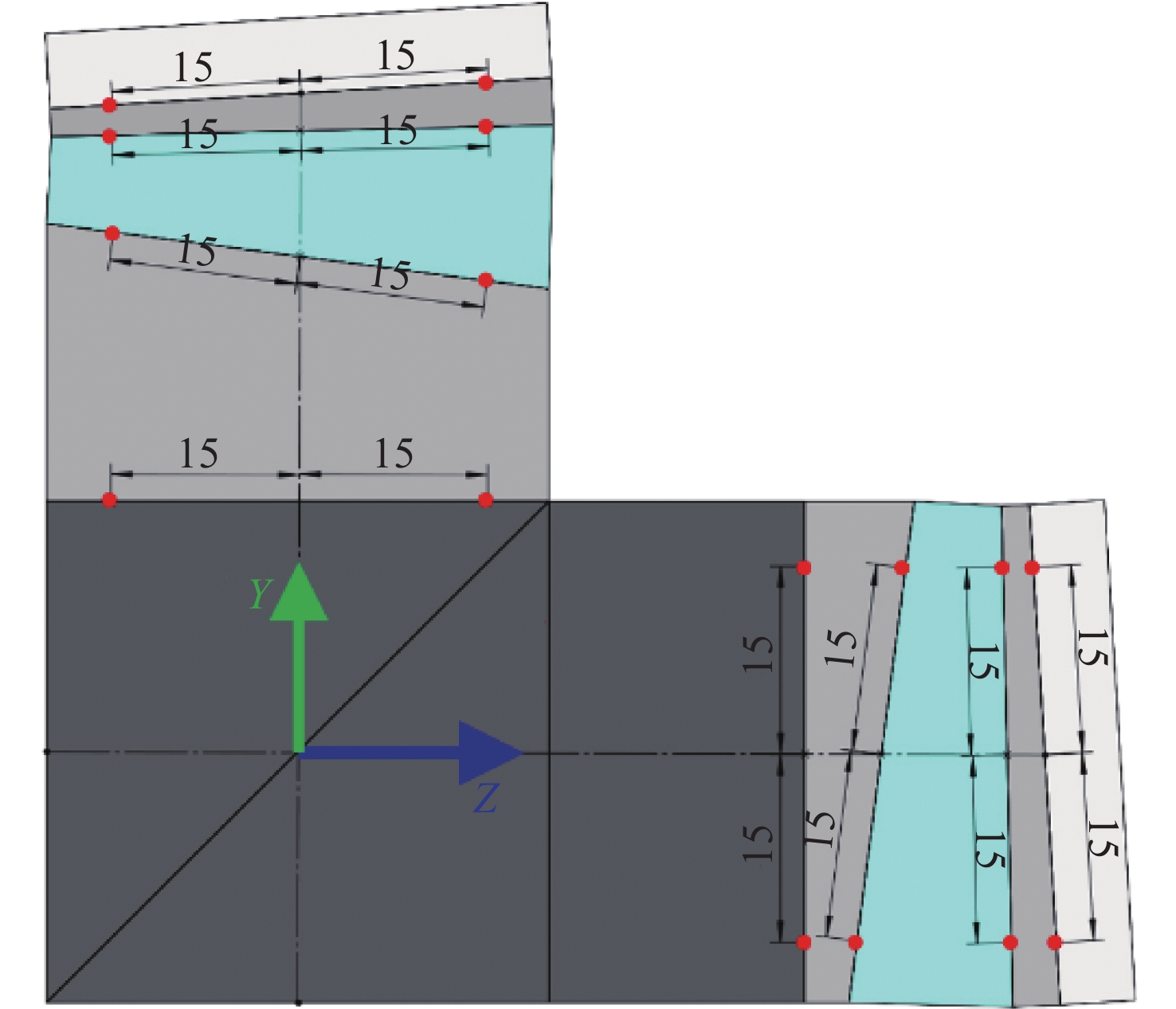
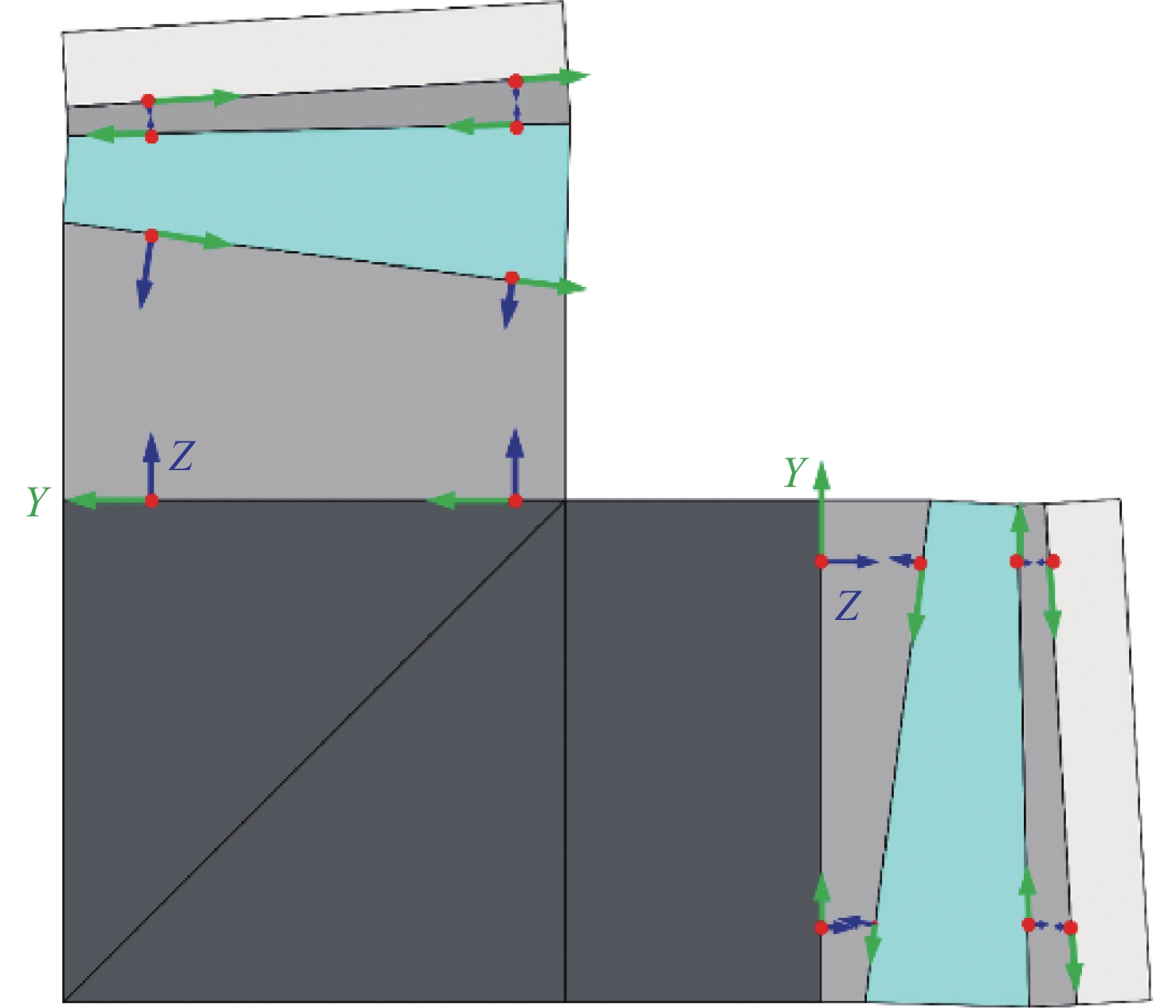
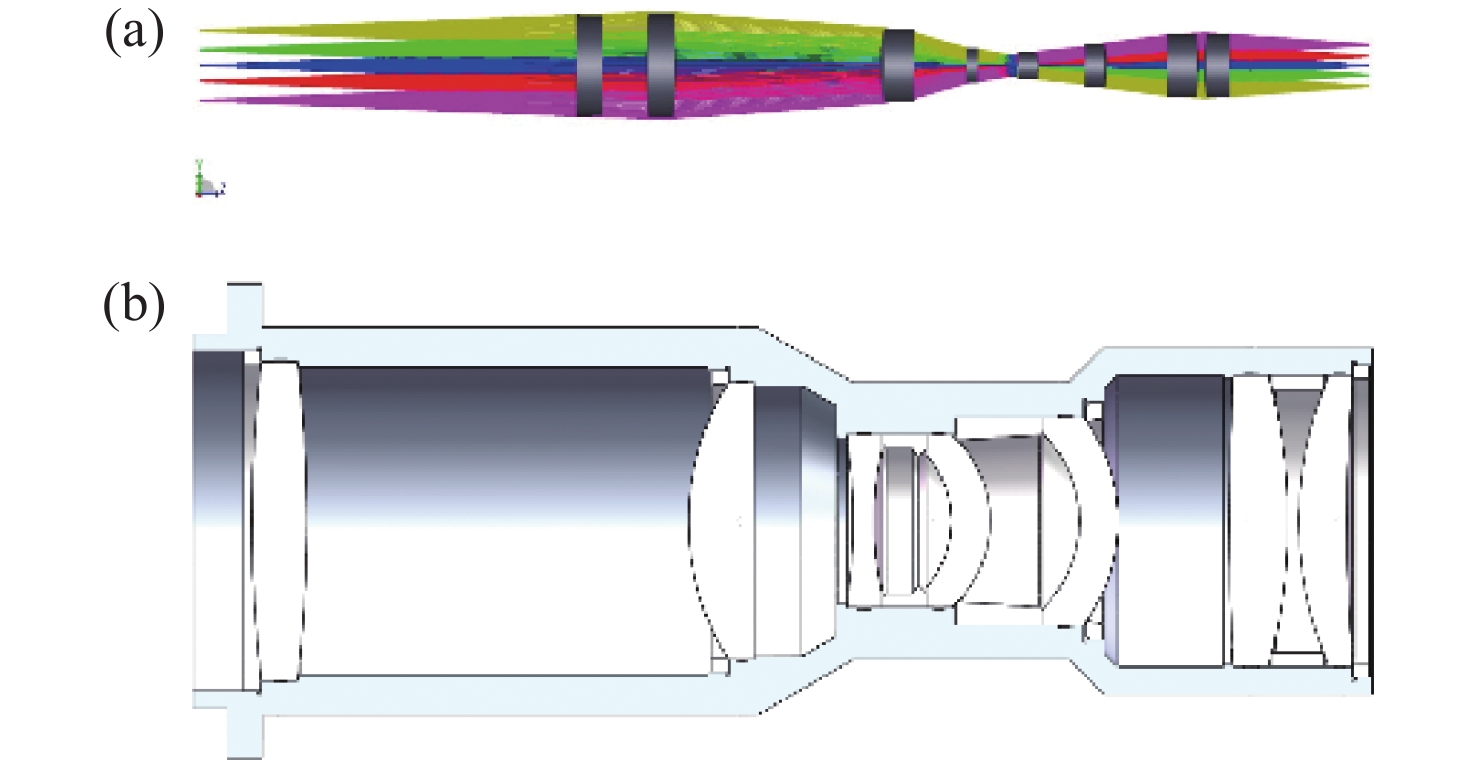
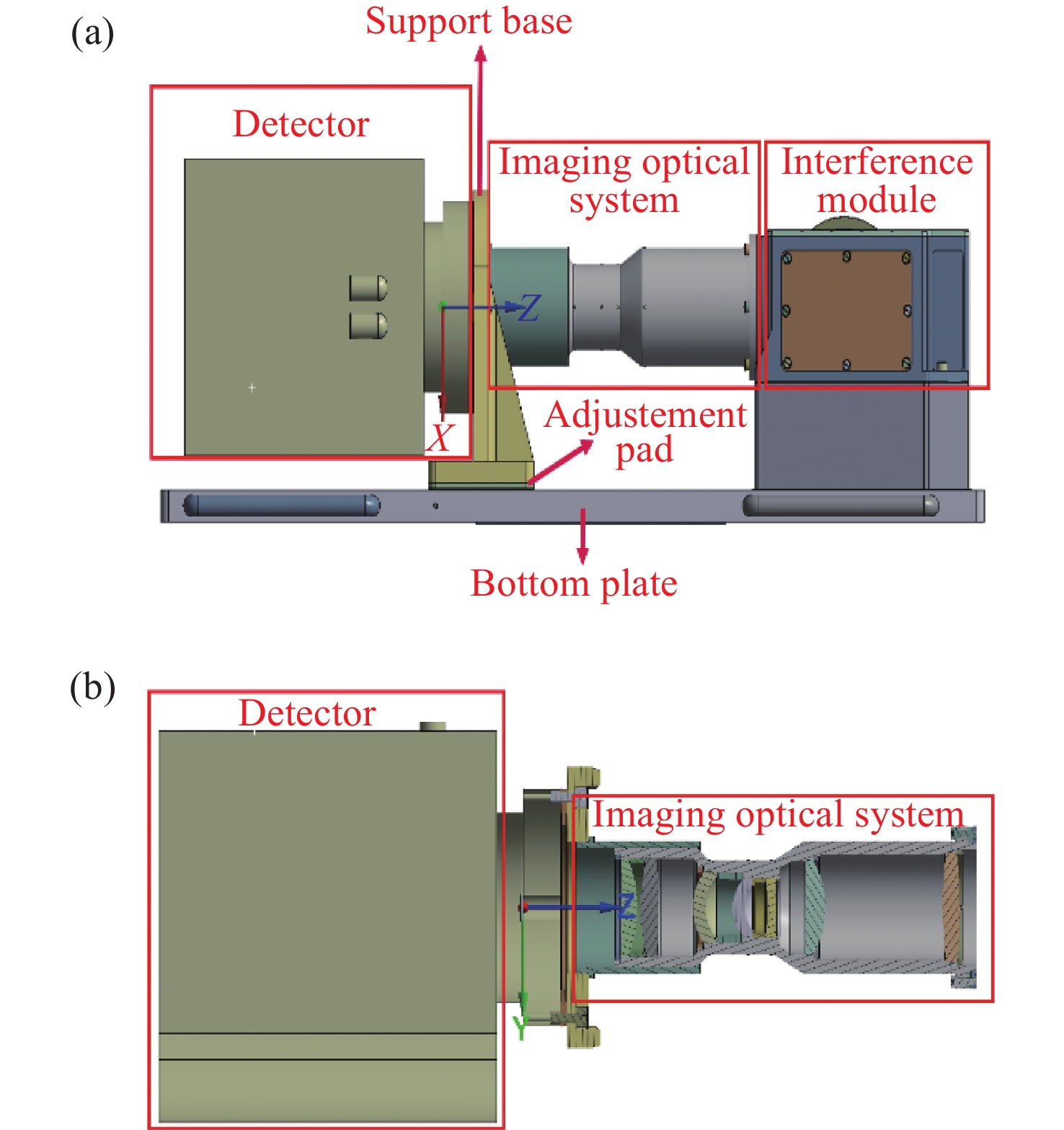
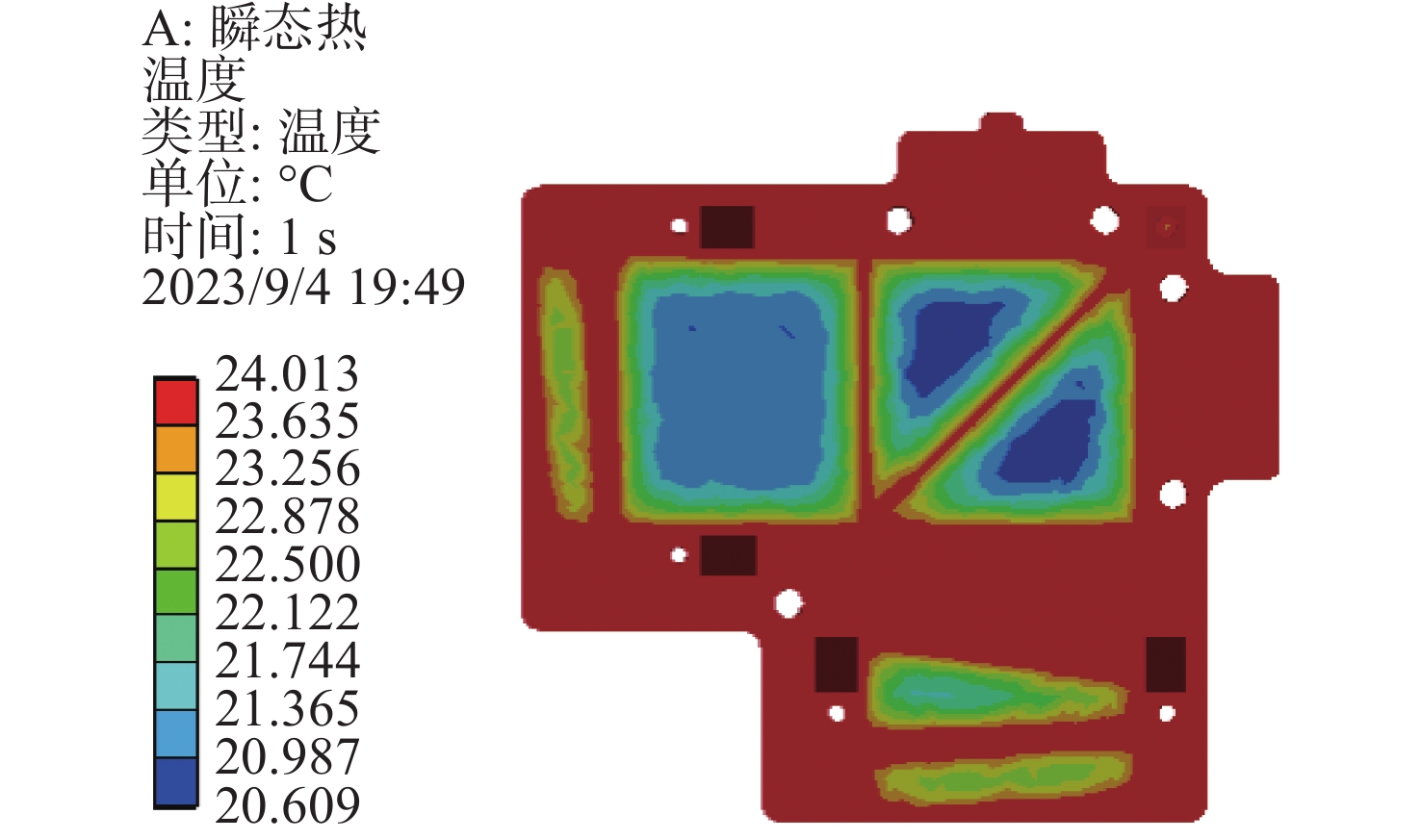
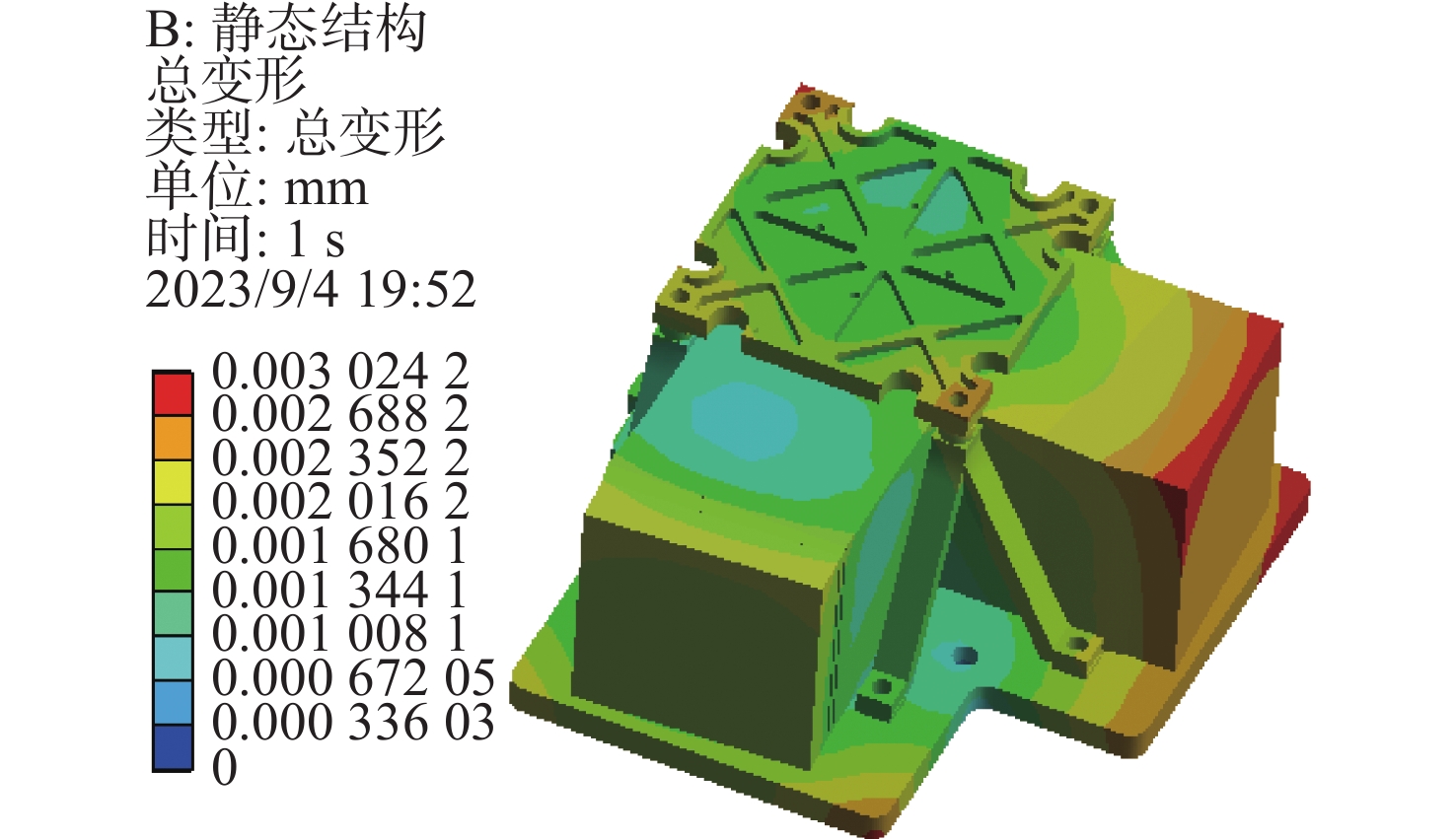
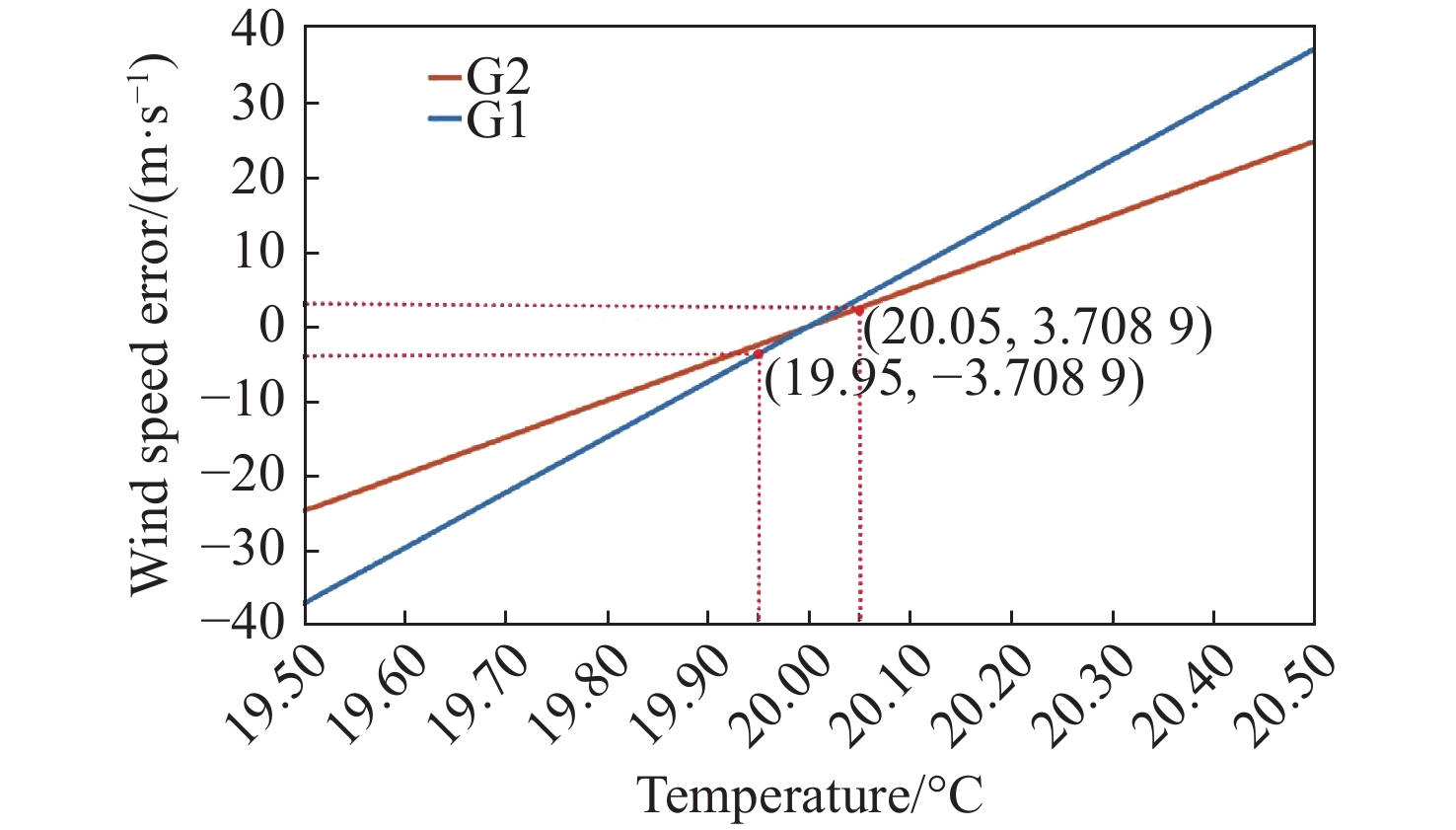
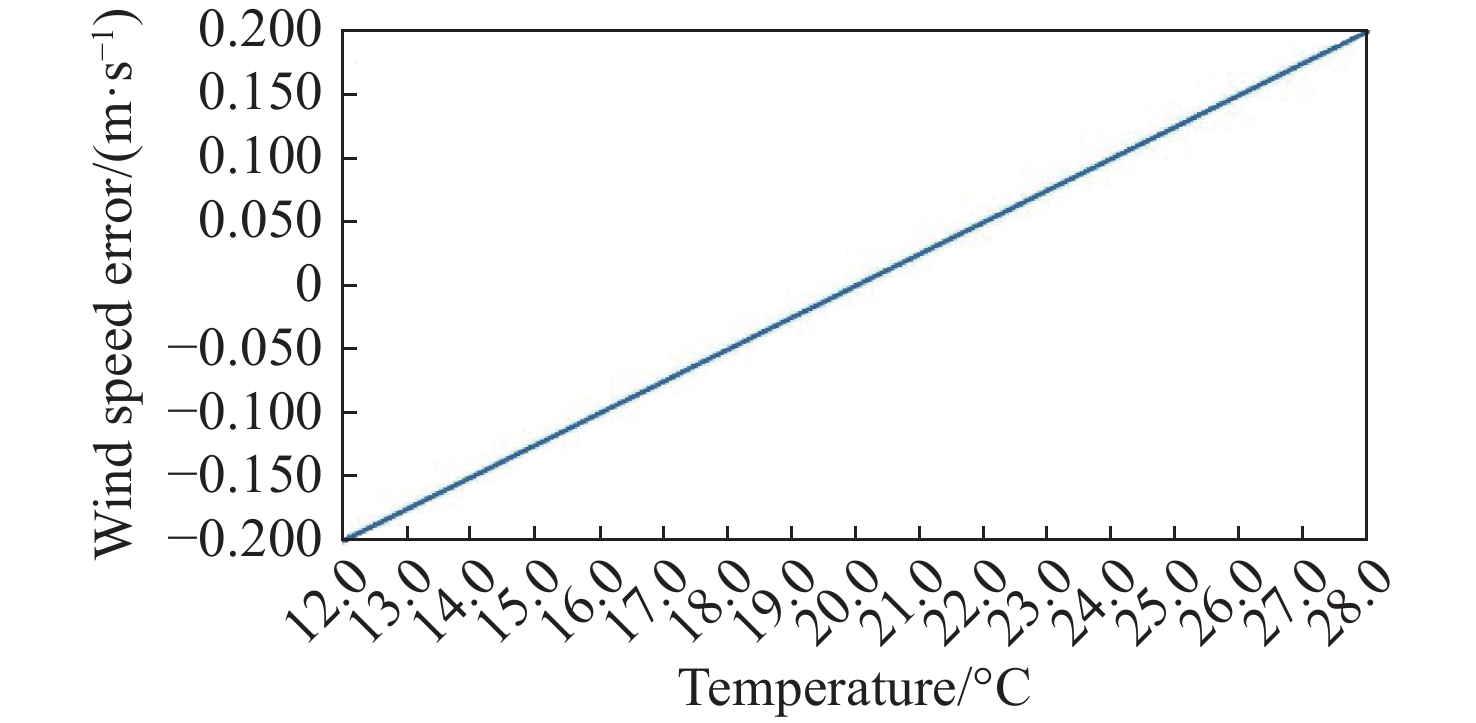
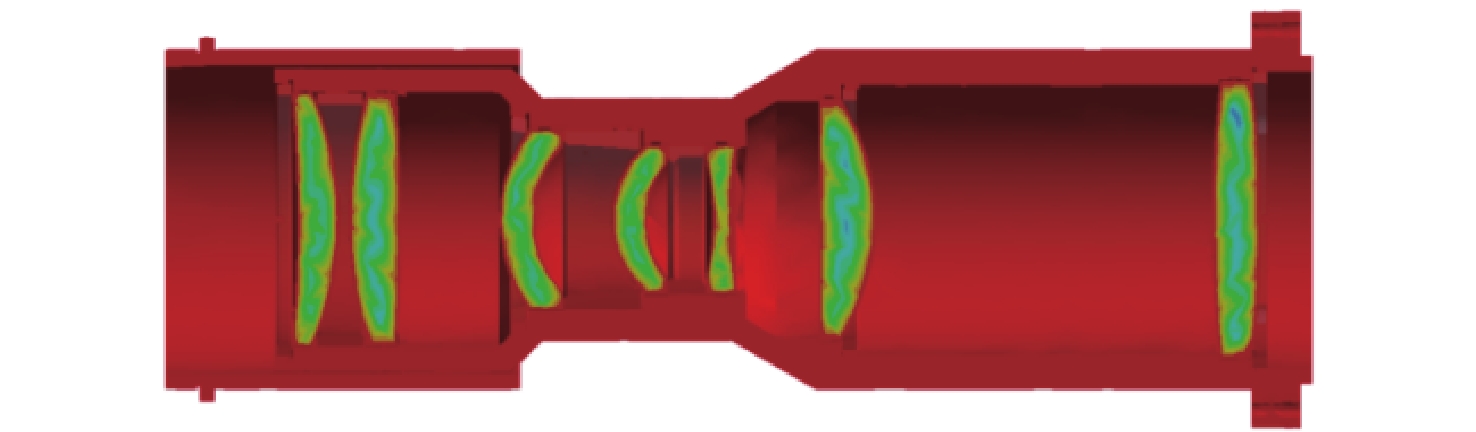
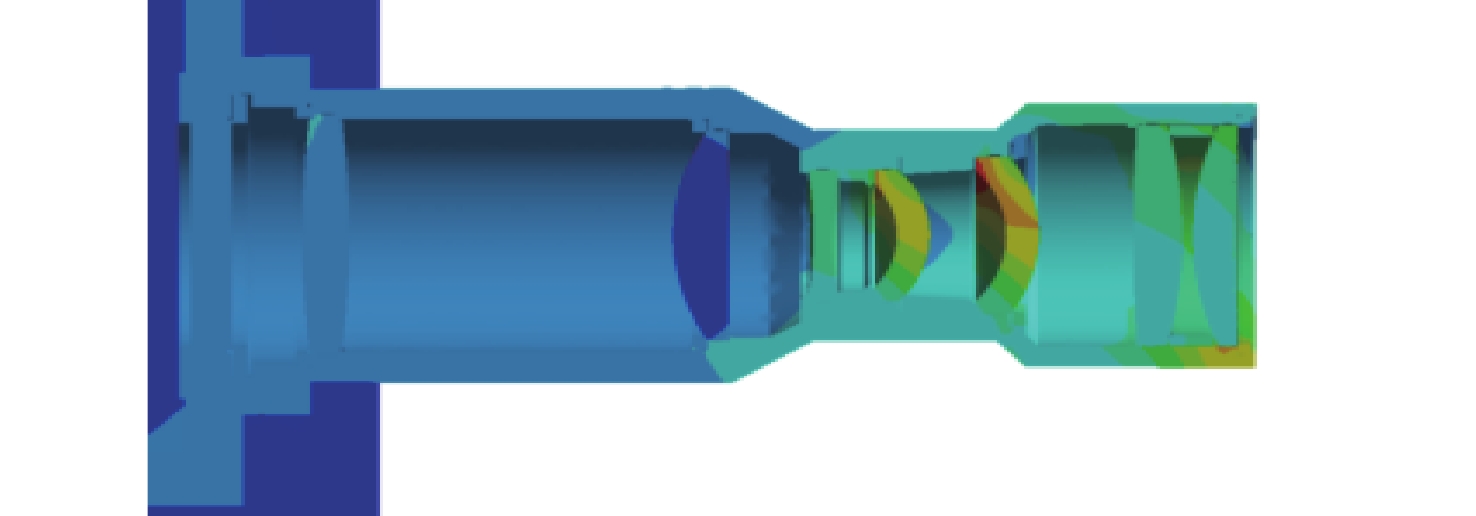
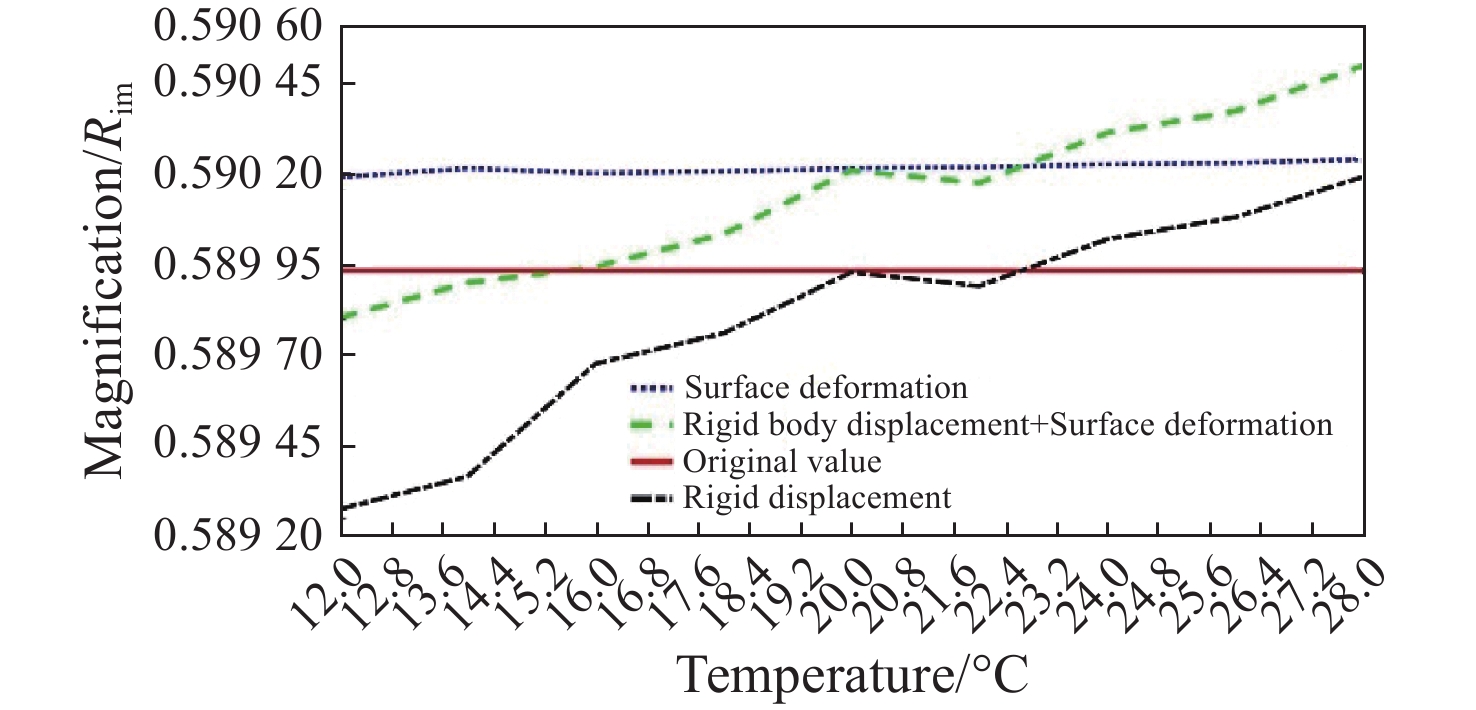
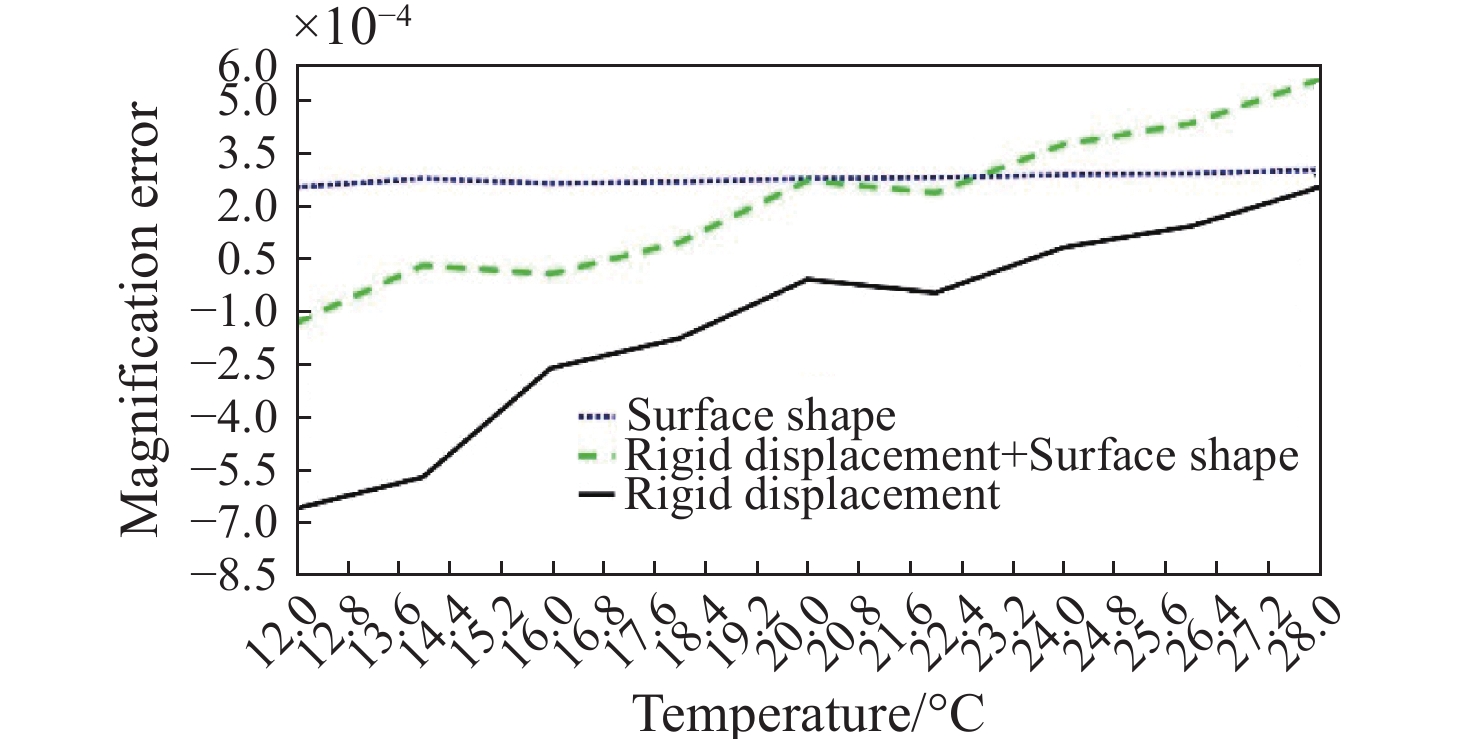
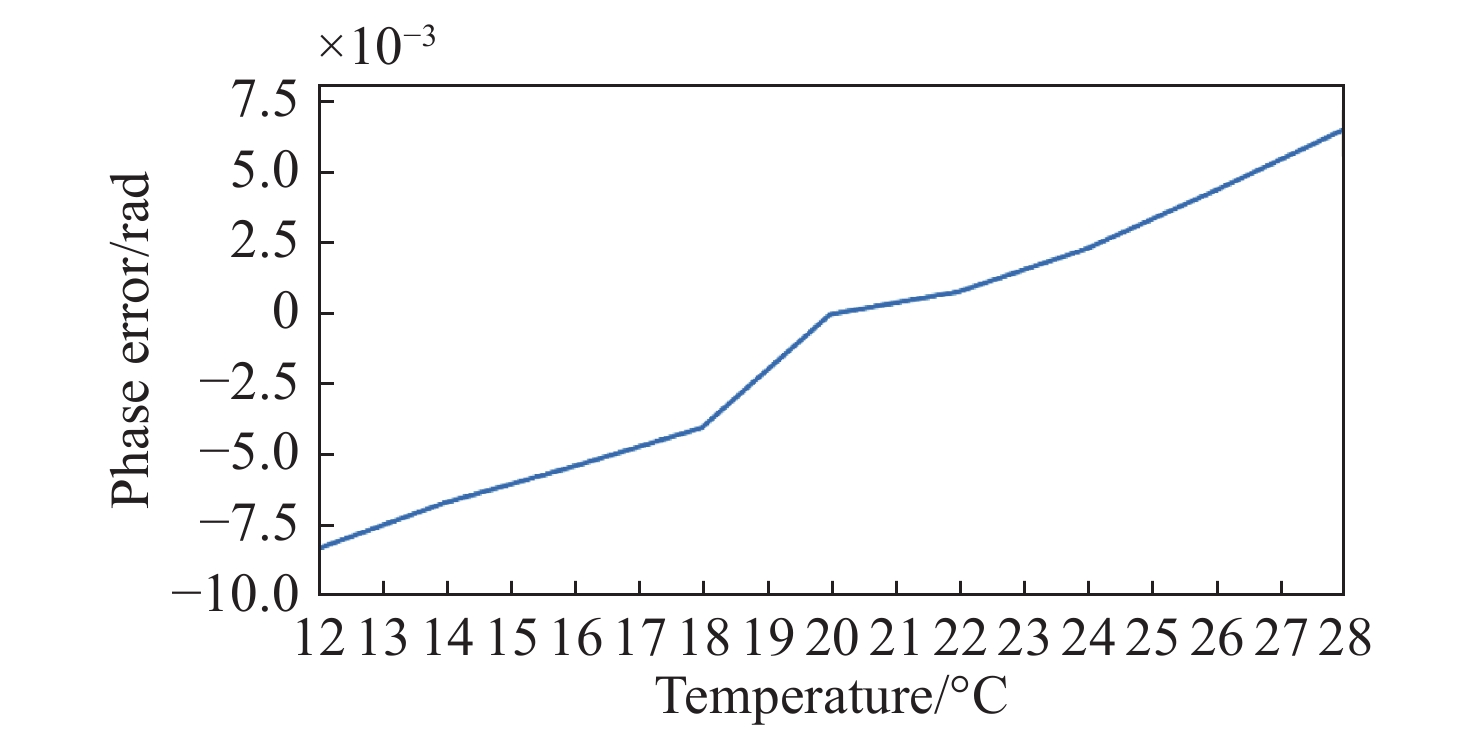
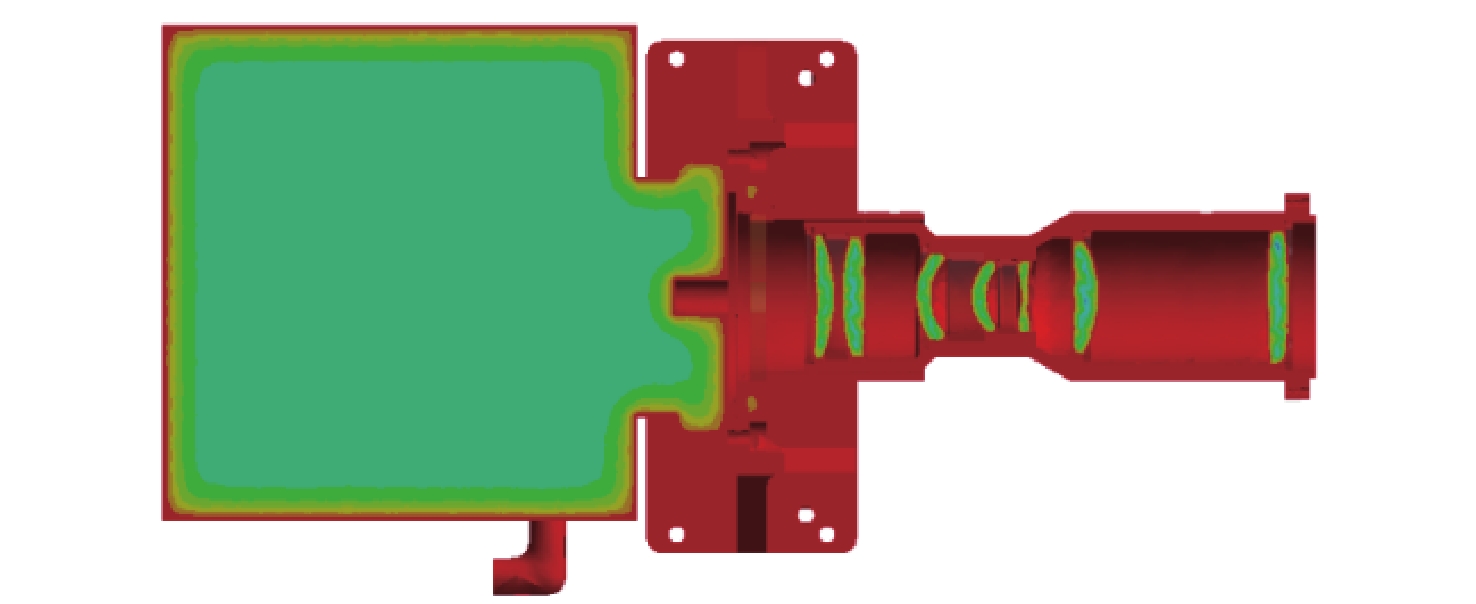
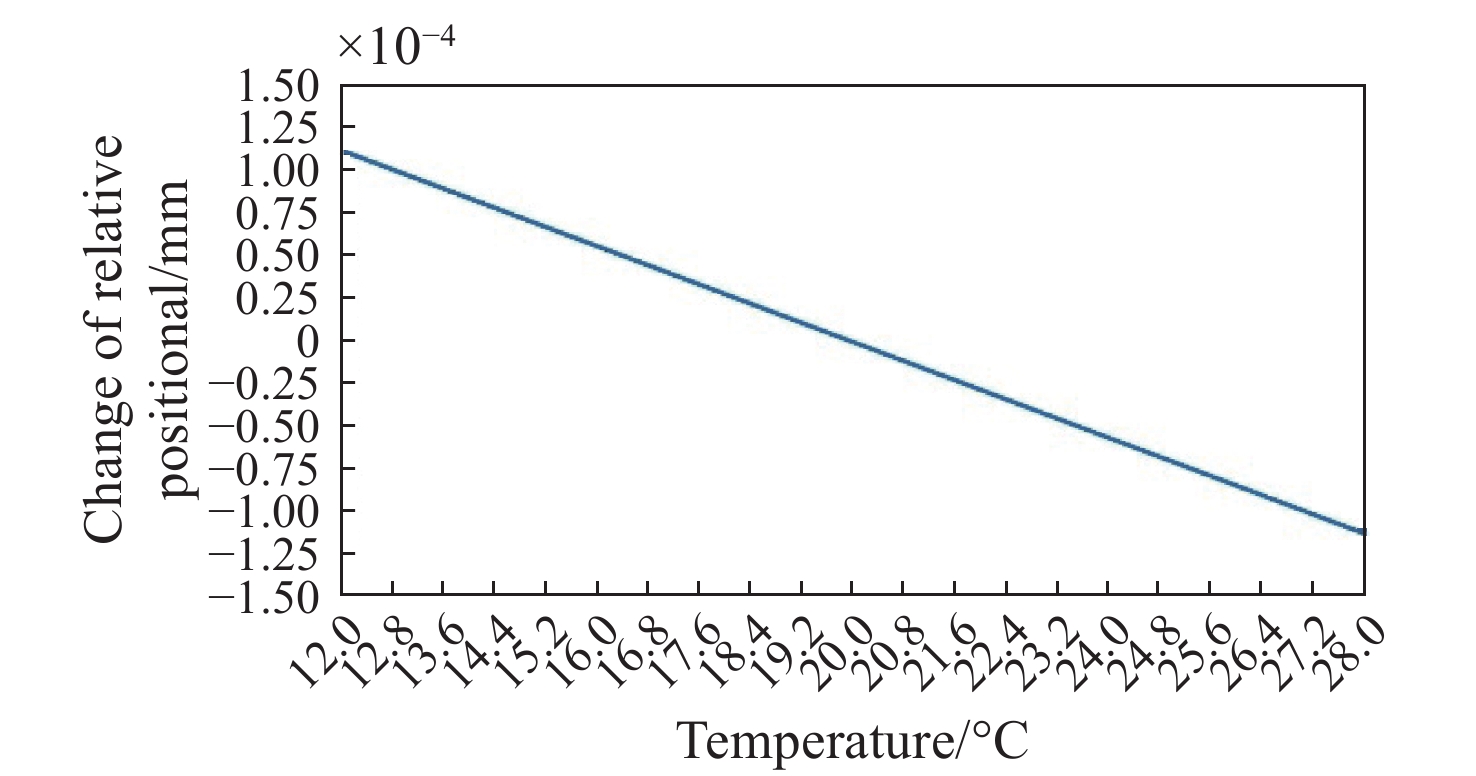
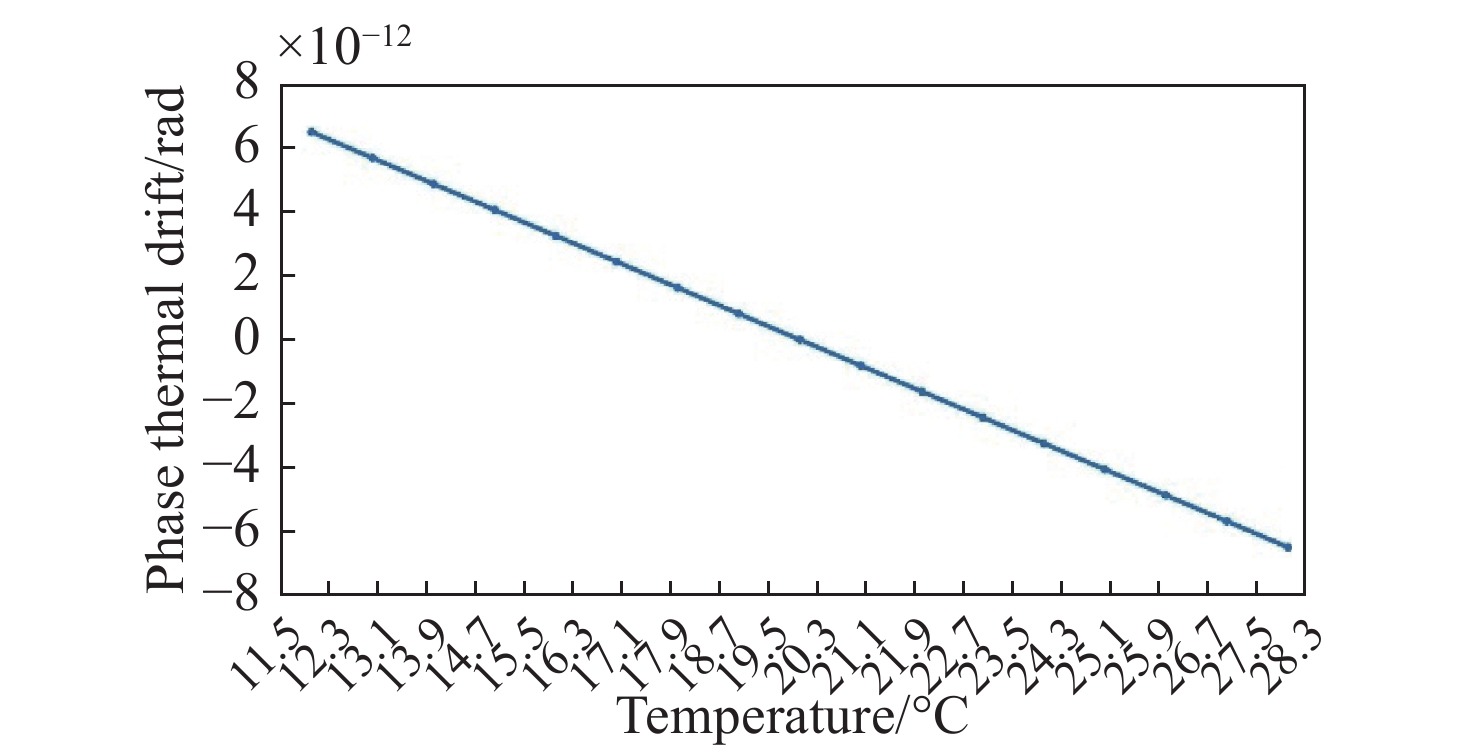
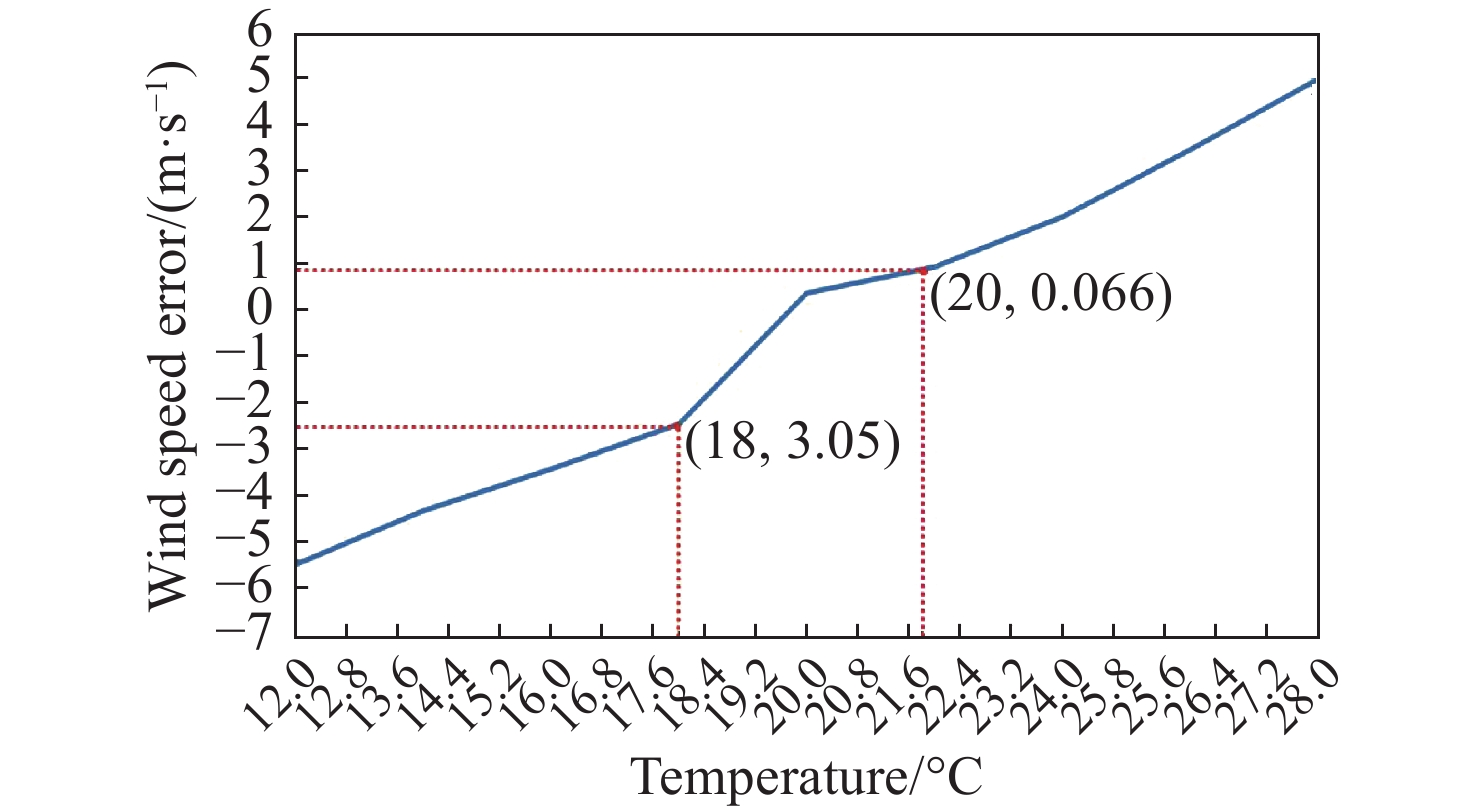
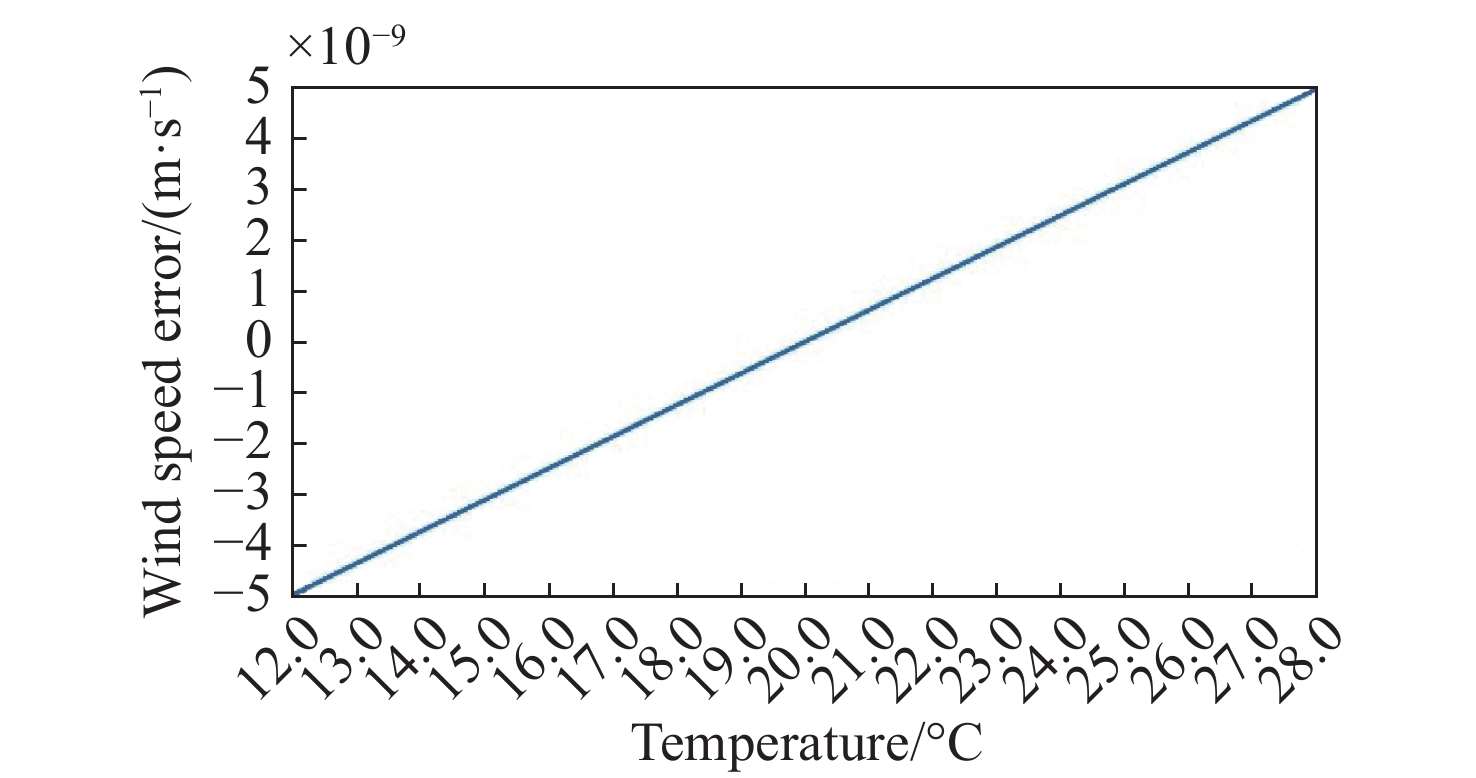
为提高地基多普勒非对称空间外差(DASH)干涉仪在恶劣温度下的探测精度,对系统进行了光机热集成分析。首先,依据干涉仪的工作原理和相位算法建立了相位与温度的关联依据。接着,设计了光机热分析模型和热变形数据获取模型,采用温度负载仿真分析给出了干涉模块和成像光学系统在不同温度下的变形数据,拟合得到热变形所导致的相位误差。最后,基于各部件热变形造成的风速误差,给出合理的温控方案。结果表明,干涉模块占据主因,必须确保温度控制在(20±0.05) °C内,并针对温度敏感部件进行温度控制,此时,该部件造成的风速误差为3.8 m/s。成像光学系统放大倍数的热漂移、成像光学系统和探测器相对位置的热漂移占据次因,应将其控制在(20±2) °C以内,此时该部件造成的风速误差为3.05 m/s。通过以上措施可以将干涉模块、成像光学系统、成像光学系统与探测器的相对位置三者共同造成的风速测量误差控制在6.85 m/s内。本文的分析方案和温控措施可以为DASH干涉仪工程应用提供理论依据。

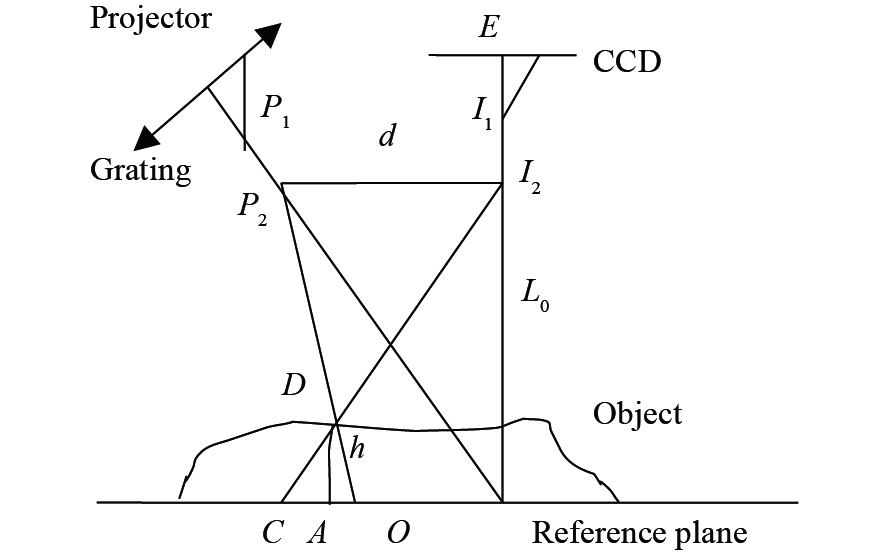
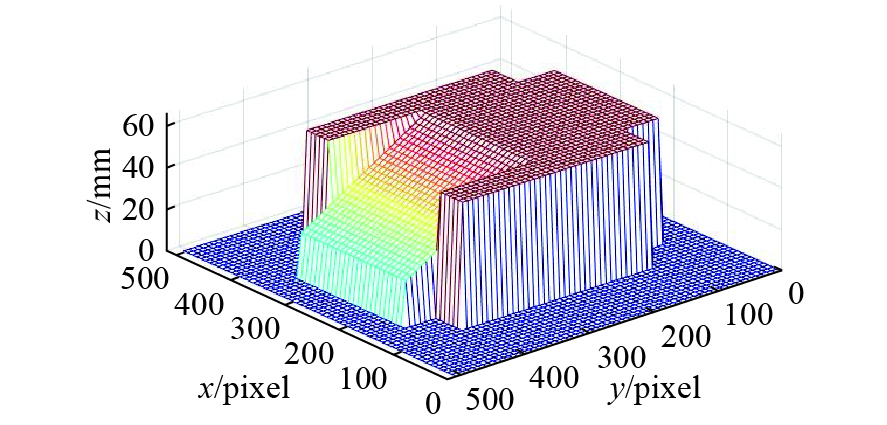
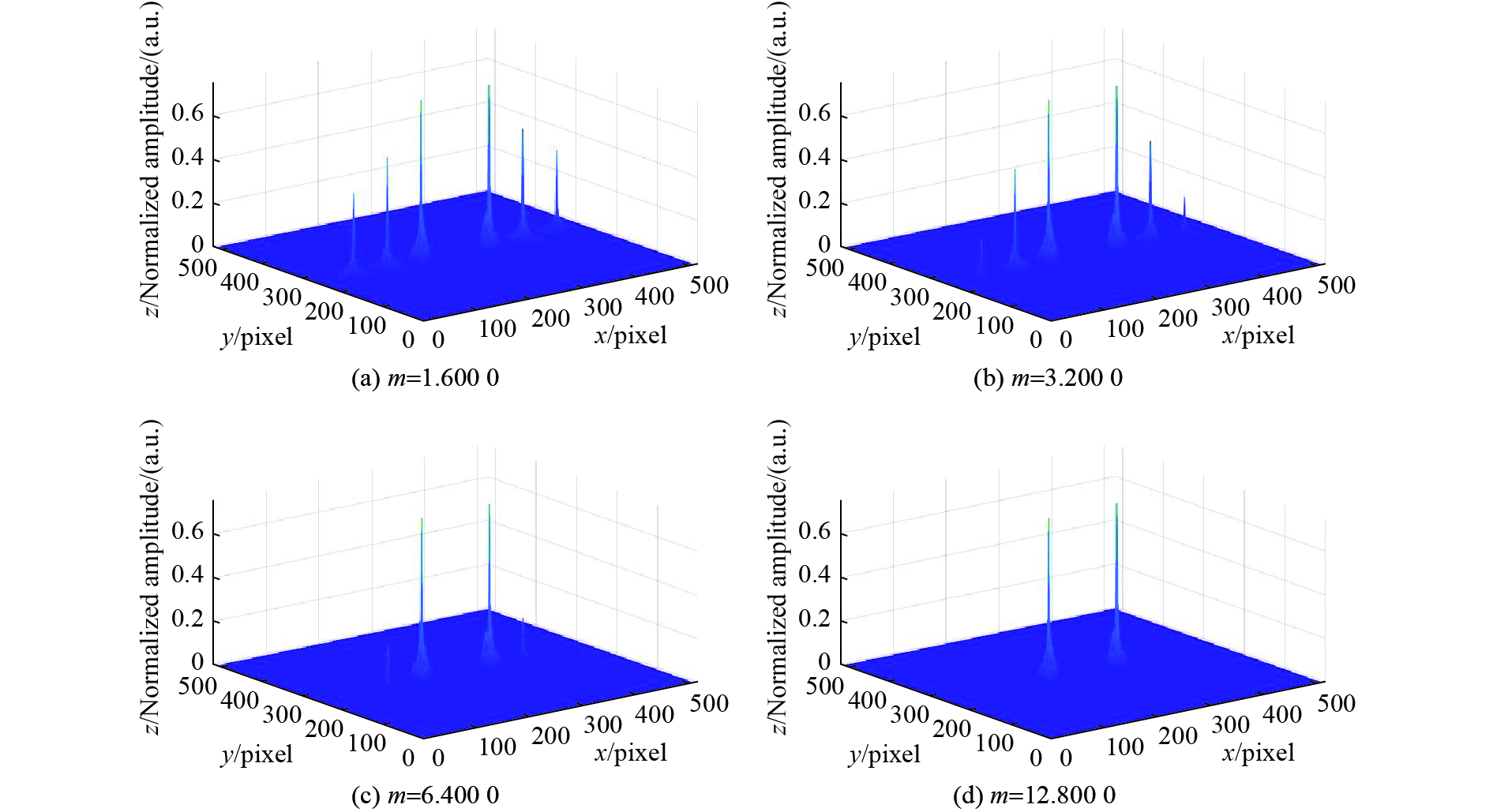
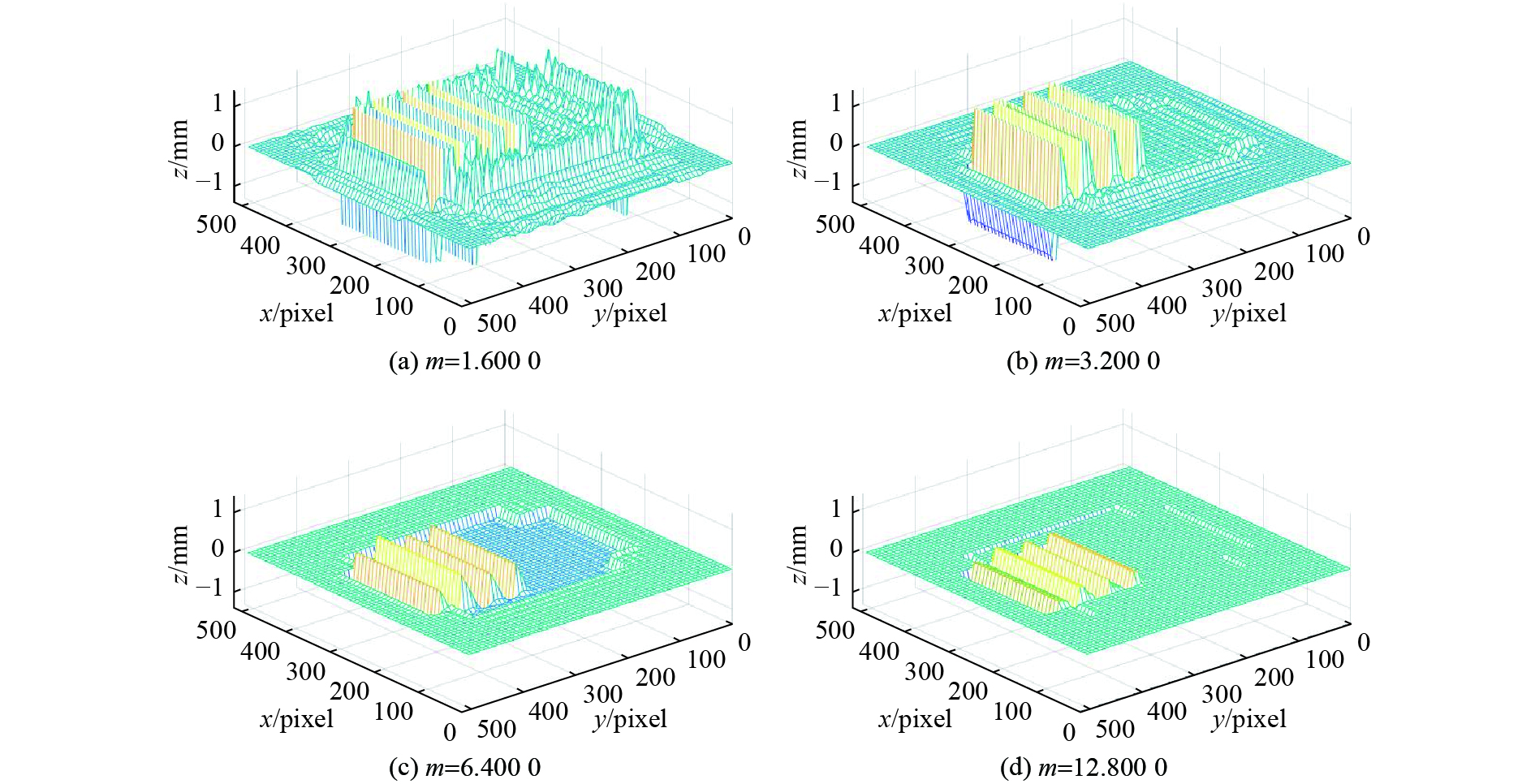
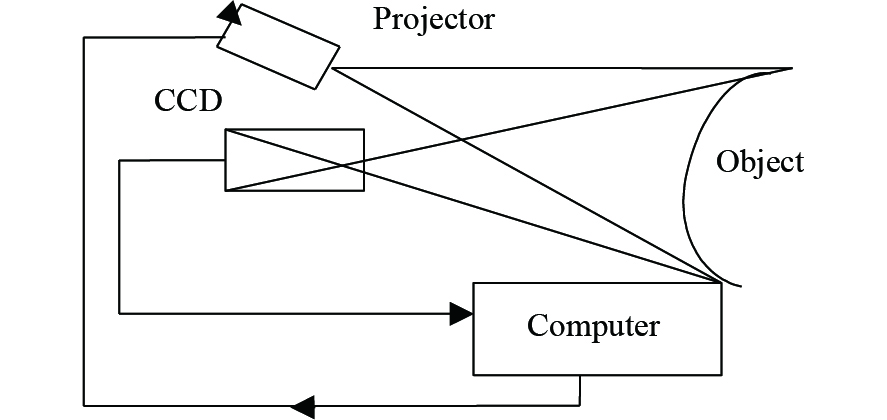
本文研究了抽样对三维形貌测量的影响。首先,利用傅立叶变换推出频谱表达式。在此基础上,分析了CCD像元的产生过程并给出了其表达式。然后,经抽样得到离散的变形条纹表达式,并推导出了其傅立叶频谱表达式,从而得到频域内无限重复的“频谱岛”。 最后,利用低通滤波器滤除高级频谱成份后仅保留其中一个基频成份,由逆傅立叶变换恢复信号强度。提出减小抽样间隔,即减小每根条纹抽样点数的方法,来增大抽样频率与光栅基频的比值