2023年 16卷 第3期
 摘要
摘要 HTML全文
HTML全文 PDF 11662KB
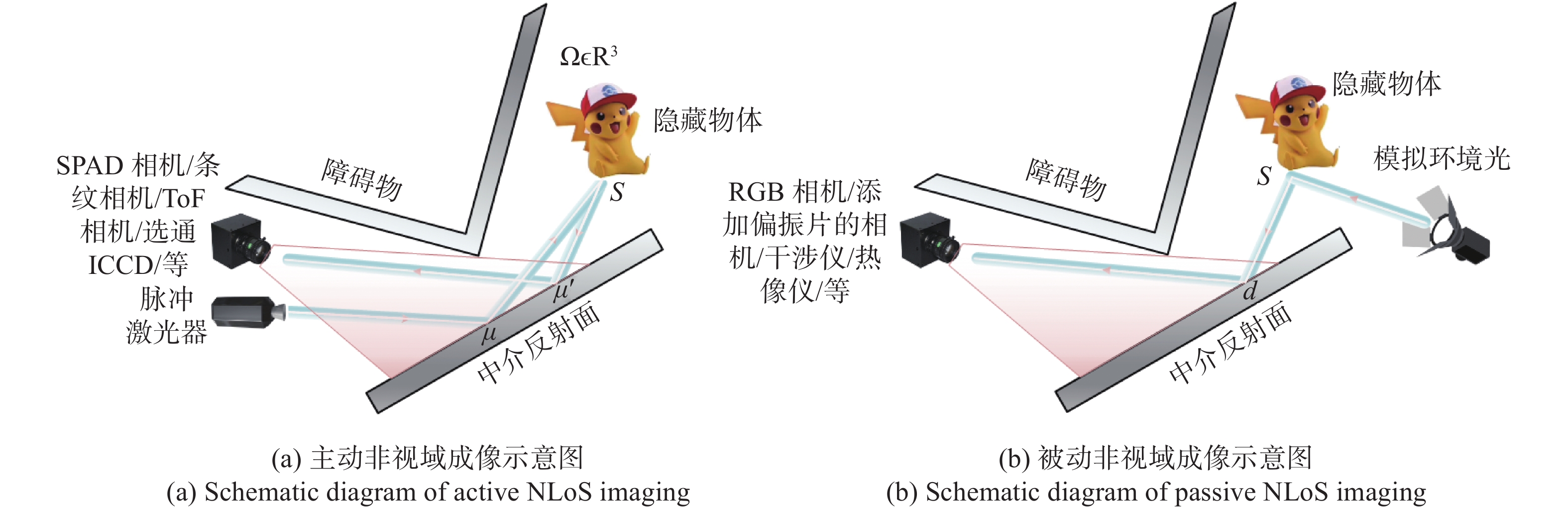
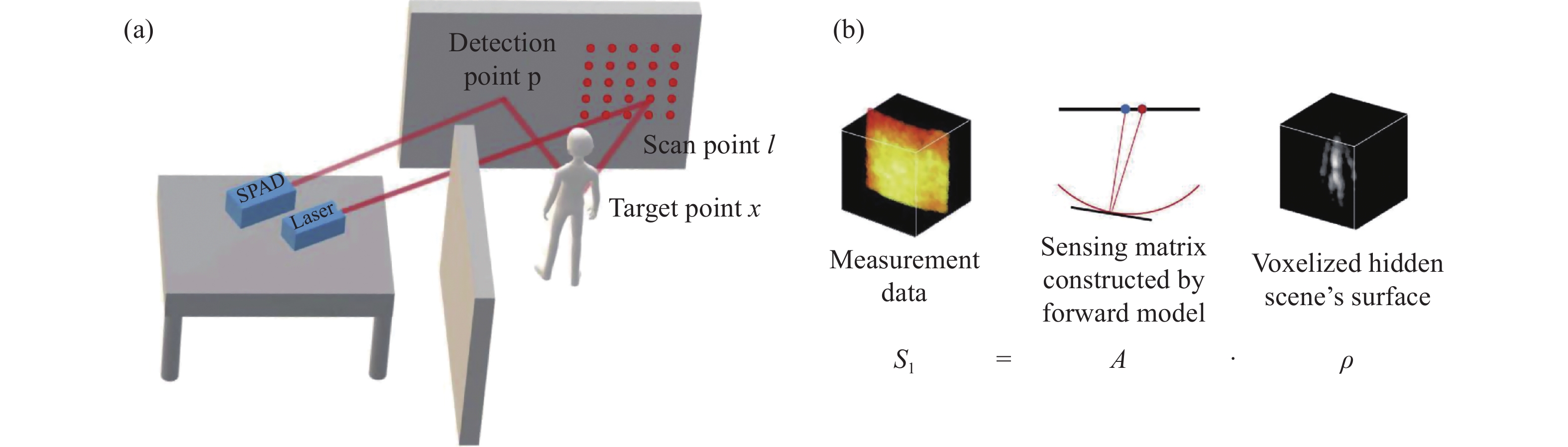
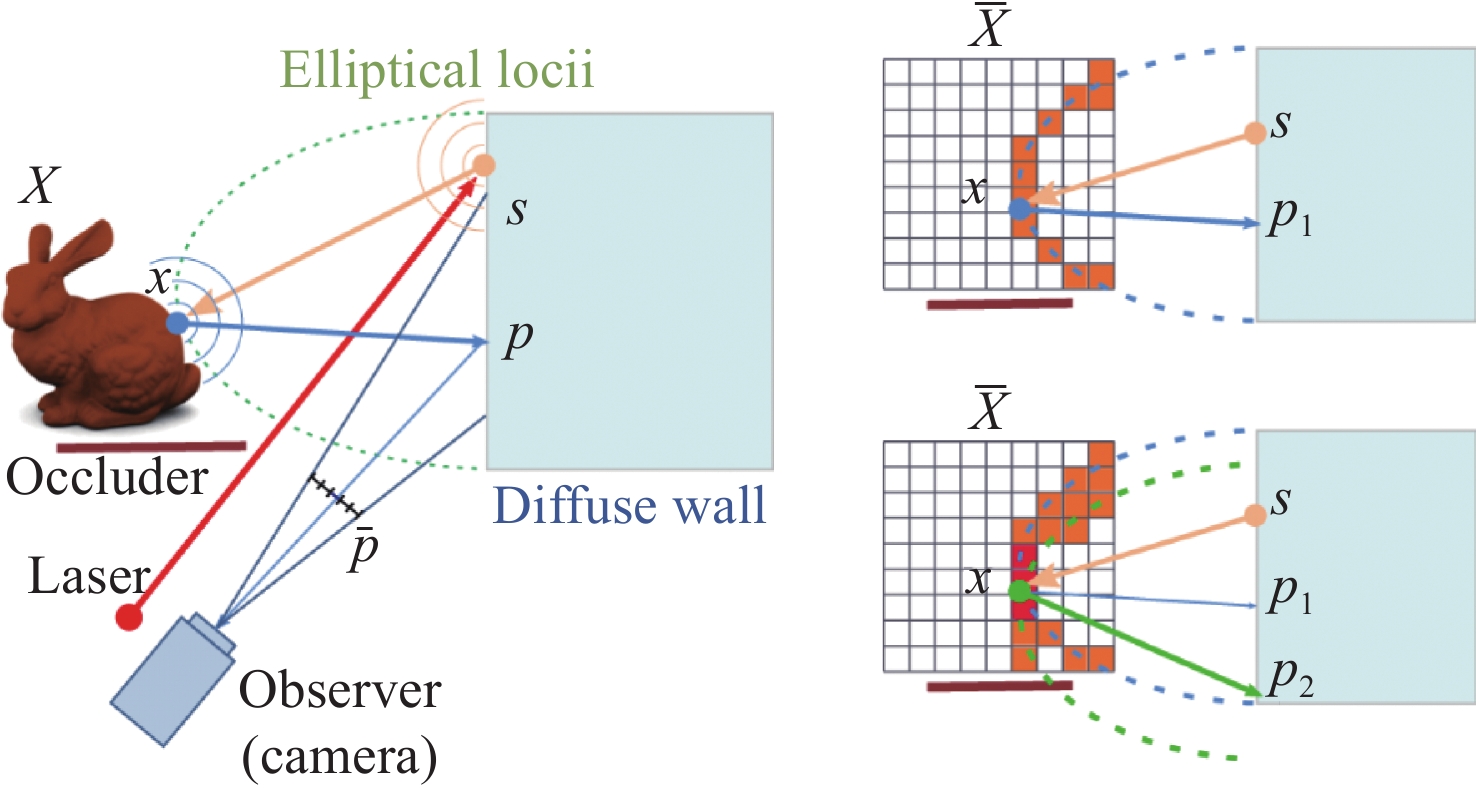
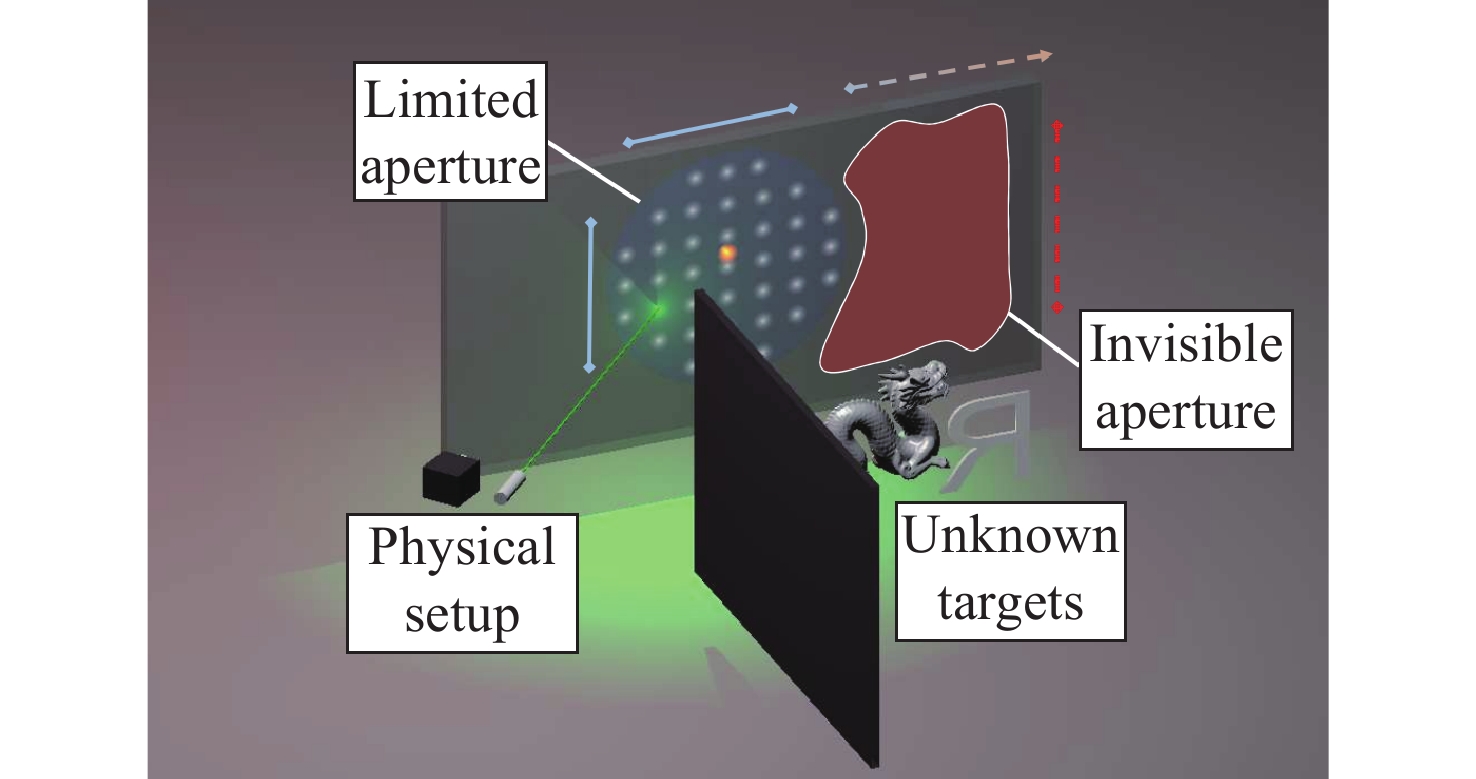
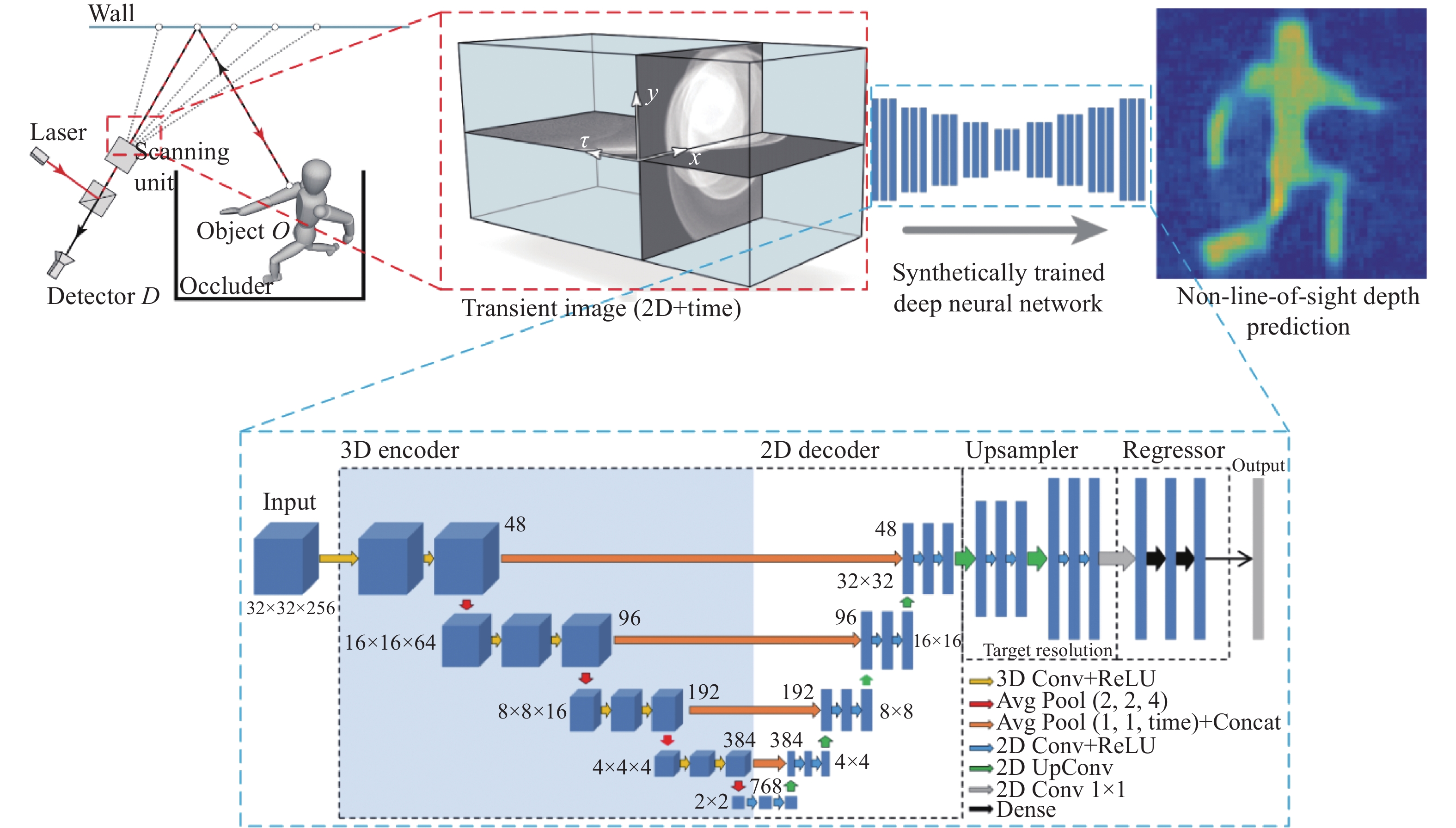
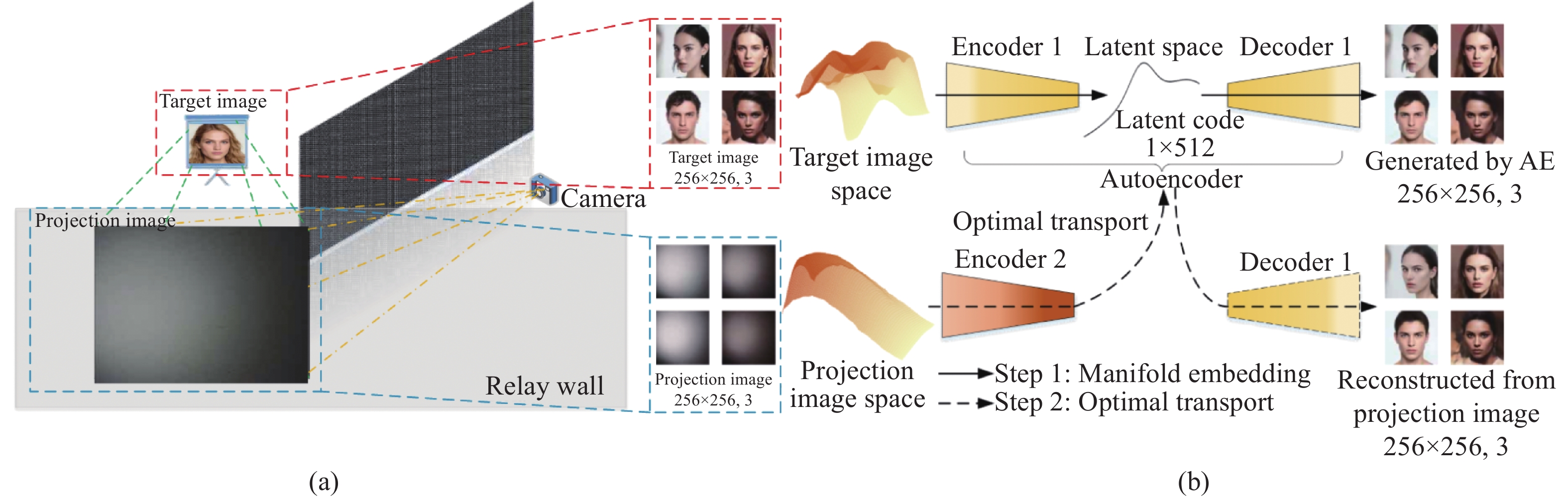
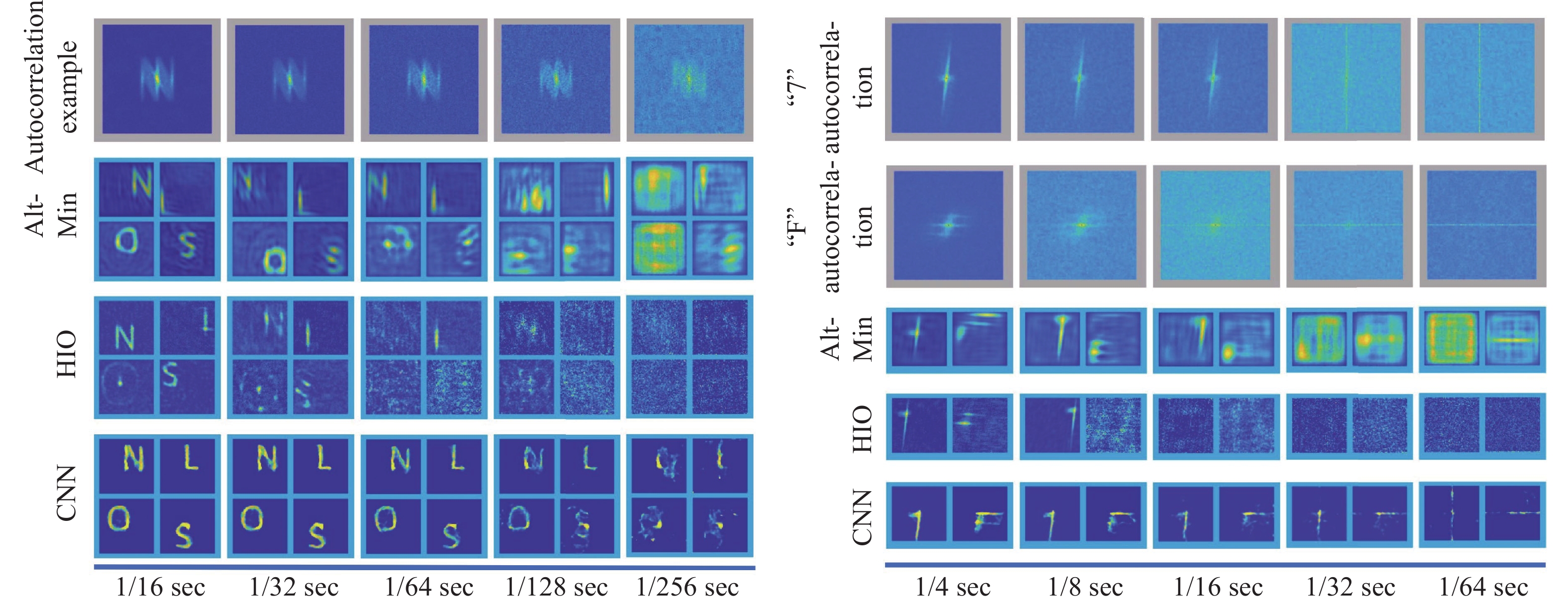
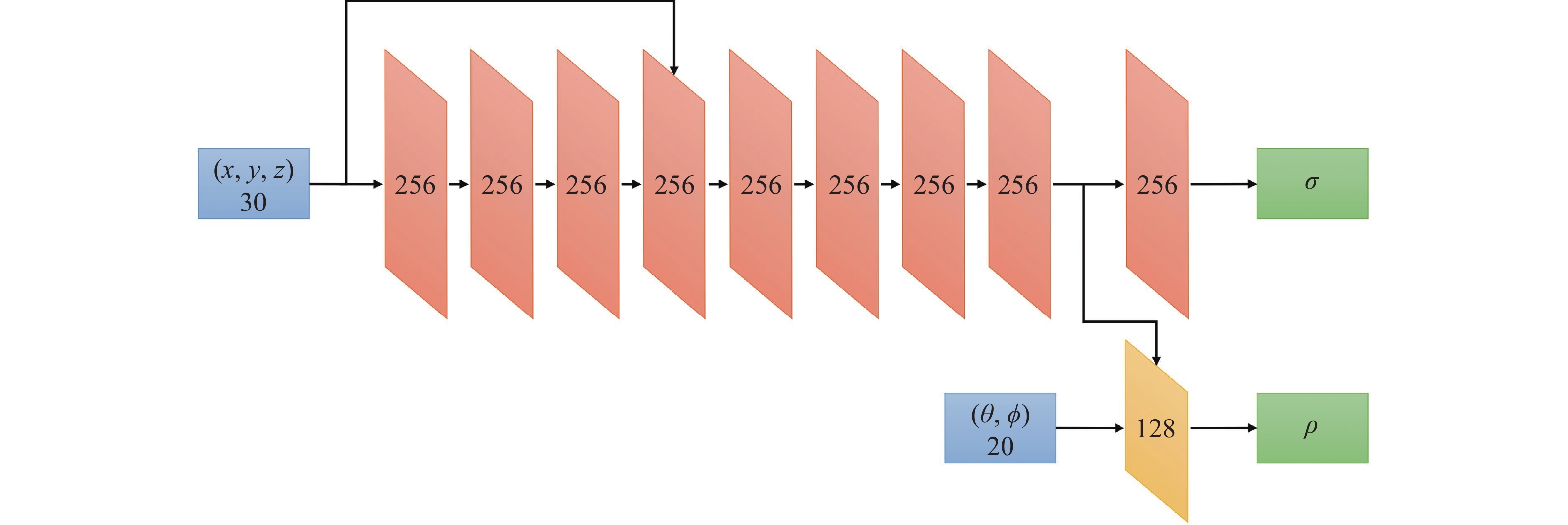
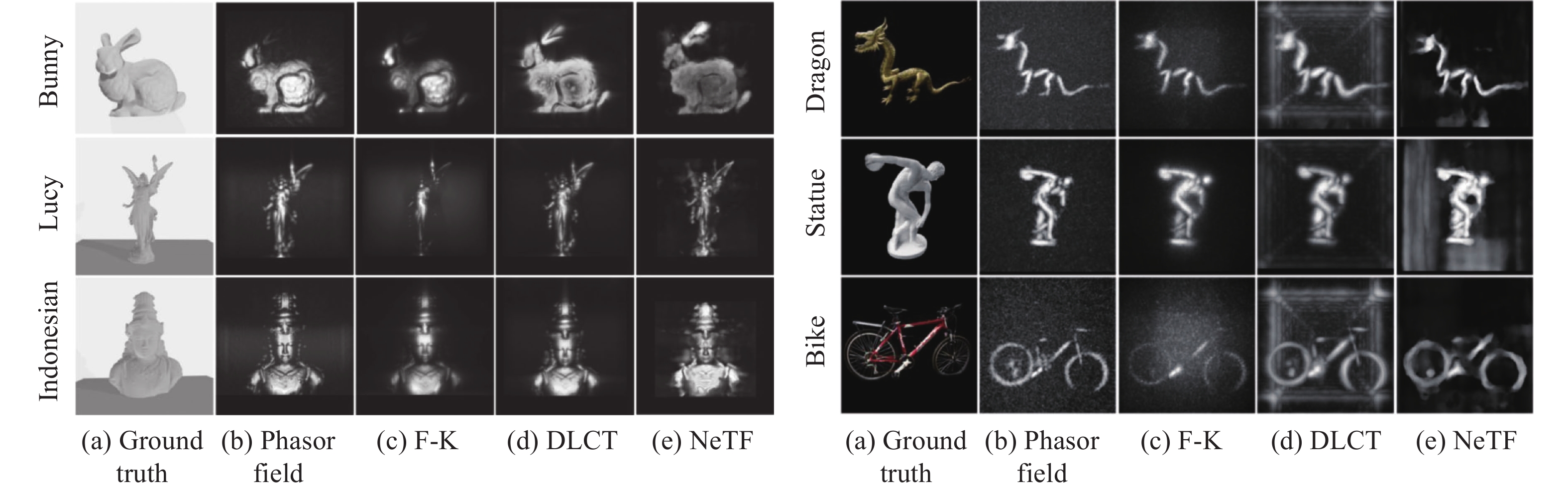
PDF 11662KB非视域(Non-Line-of-Sight, NLoS)成像是近年来发展起来的一项新兴技术,其通过分析成像场景中的中介面信息来重建隐藏场景,实现了“拐弯成像”的效果,在多个领域有巨大的应用价值。本文主要针对NLoS成像重建算法进行综述性研究。考虑到目前NLoS成像分类存在交叉和非独立现象,本文基于物理成像模式和算法模型的不同特点,对其进行了独立的重新分类。根据提出的分类标准分别对传统和基于深度学习的NLoS成像重建算法进行了归纳总结,对代表性算法的发展现状进行了概述,推导了典型方法的实现原理,并对比了传统重建方法和基于深度学习的NLoS成像重建算法的重建应用结果。总结了NLoS成像目前存在的挑战和未来的发展方向。该研究对不同类型的NLoS成像进行了较为全面的梳理,对NLoS成像重建算法在内的一系列研究的进一步发展有着一定的支撑和推动作用。







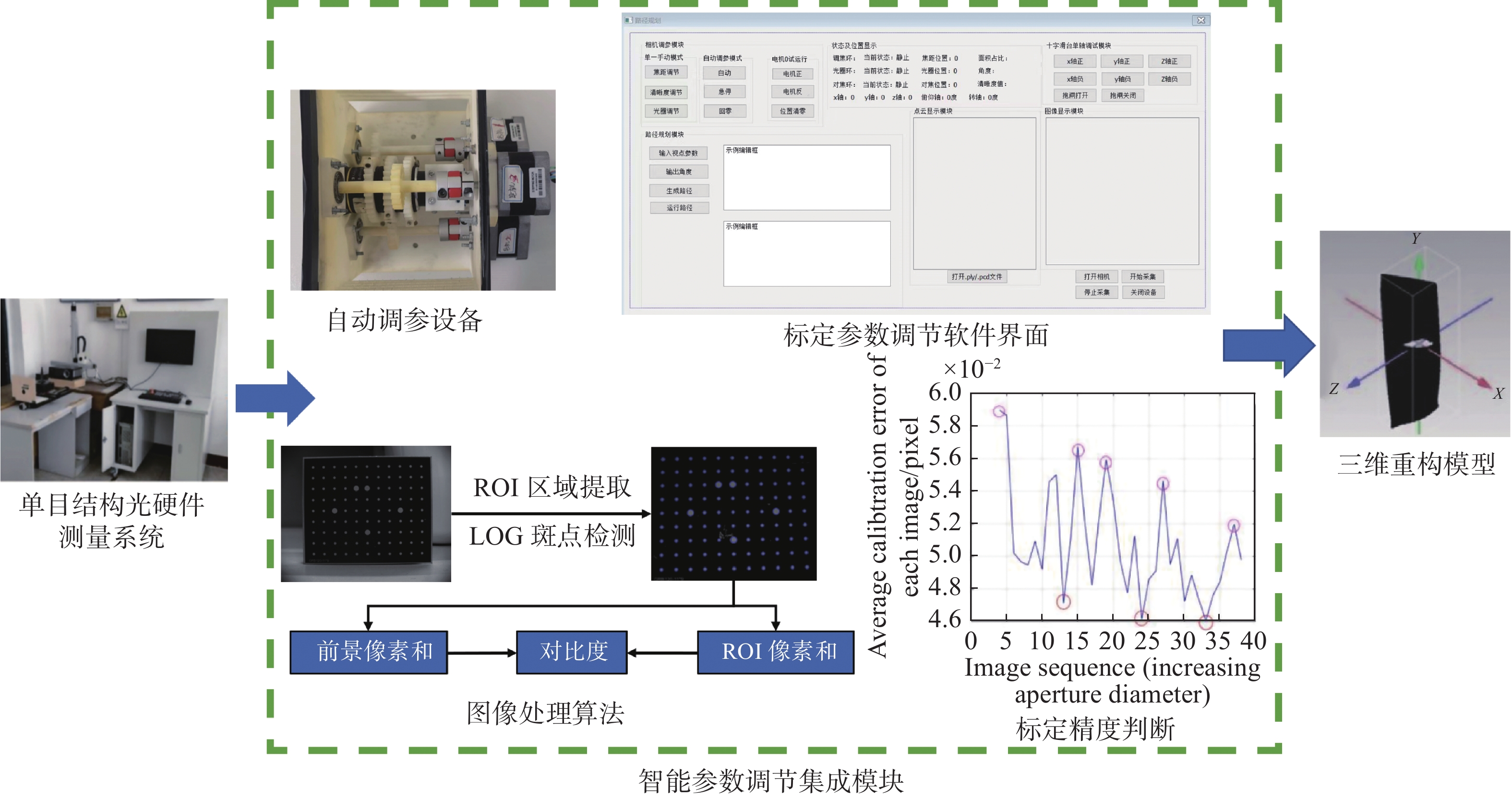
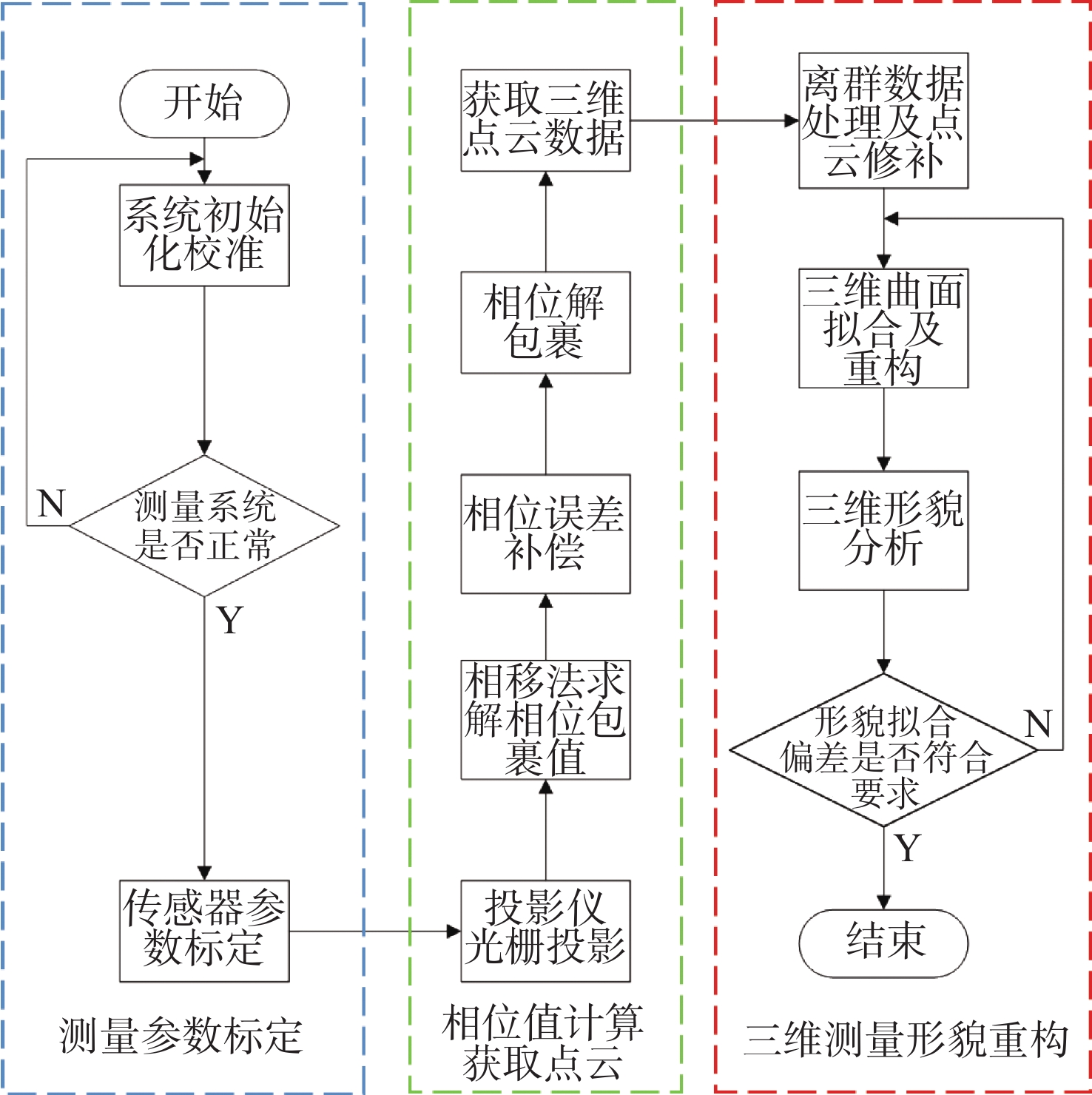
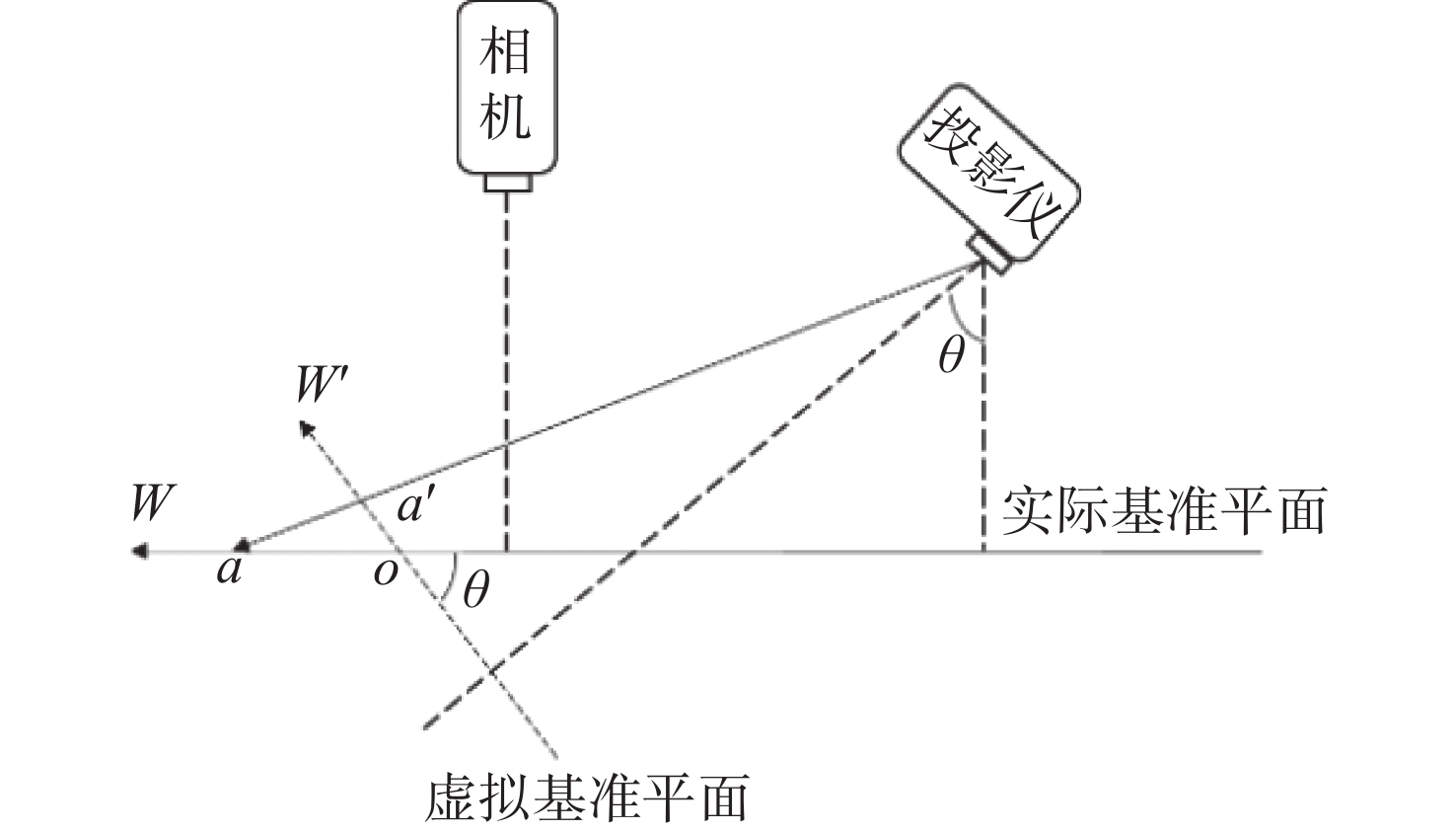
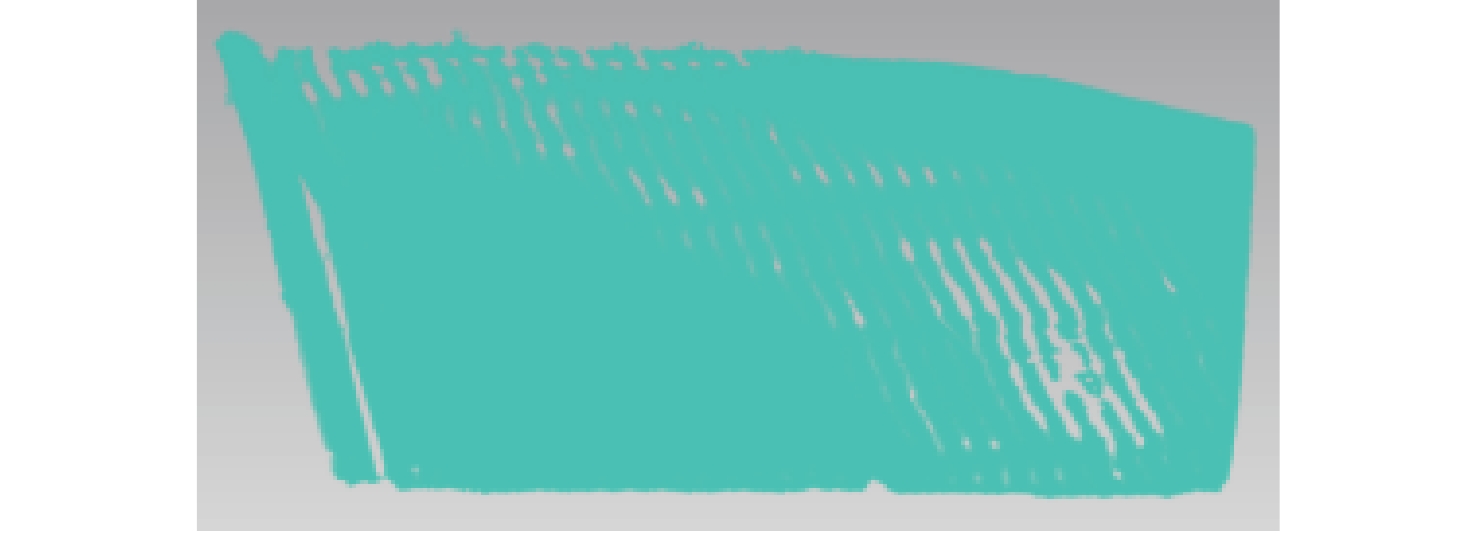
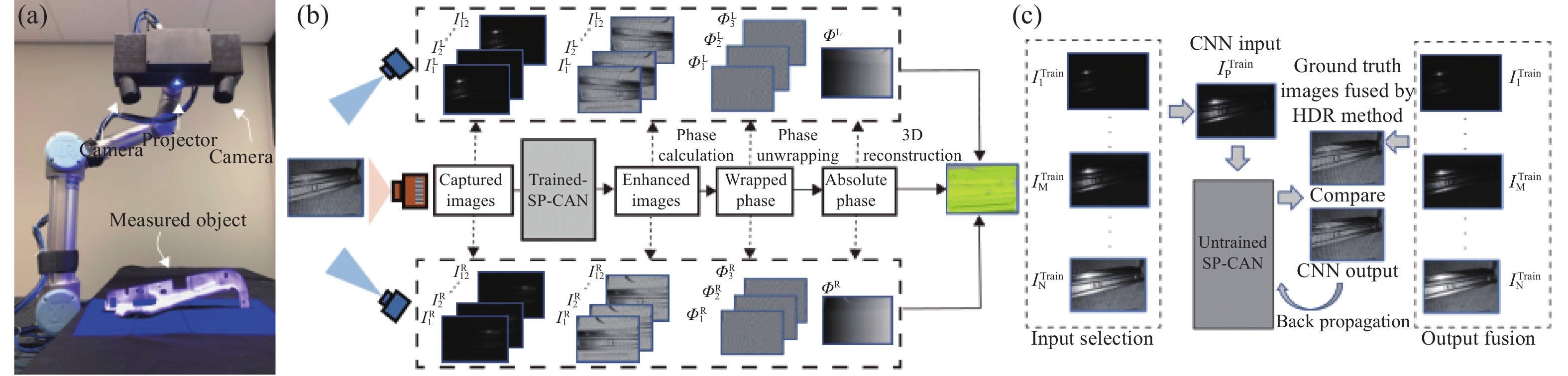
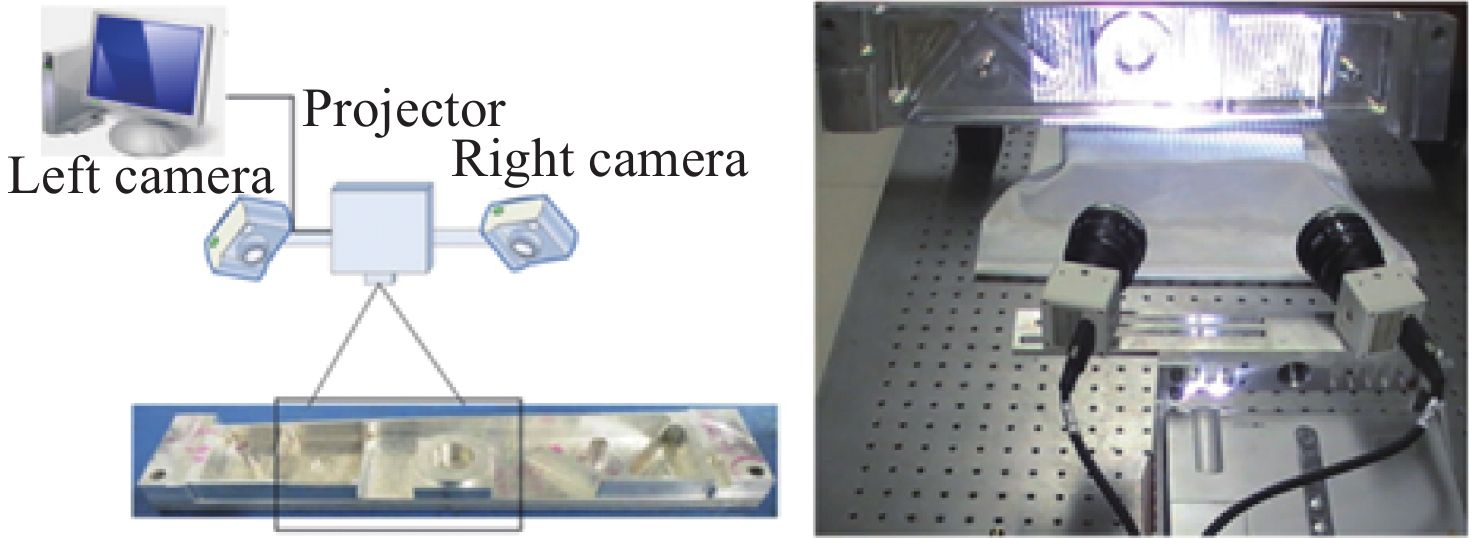
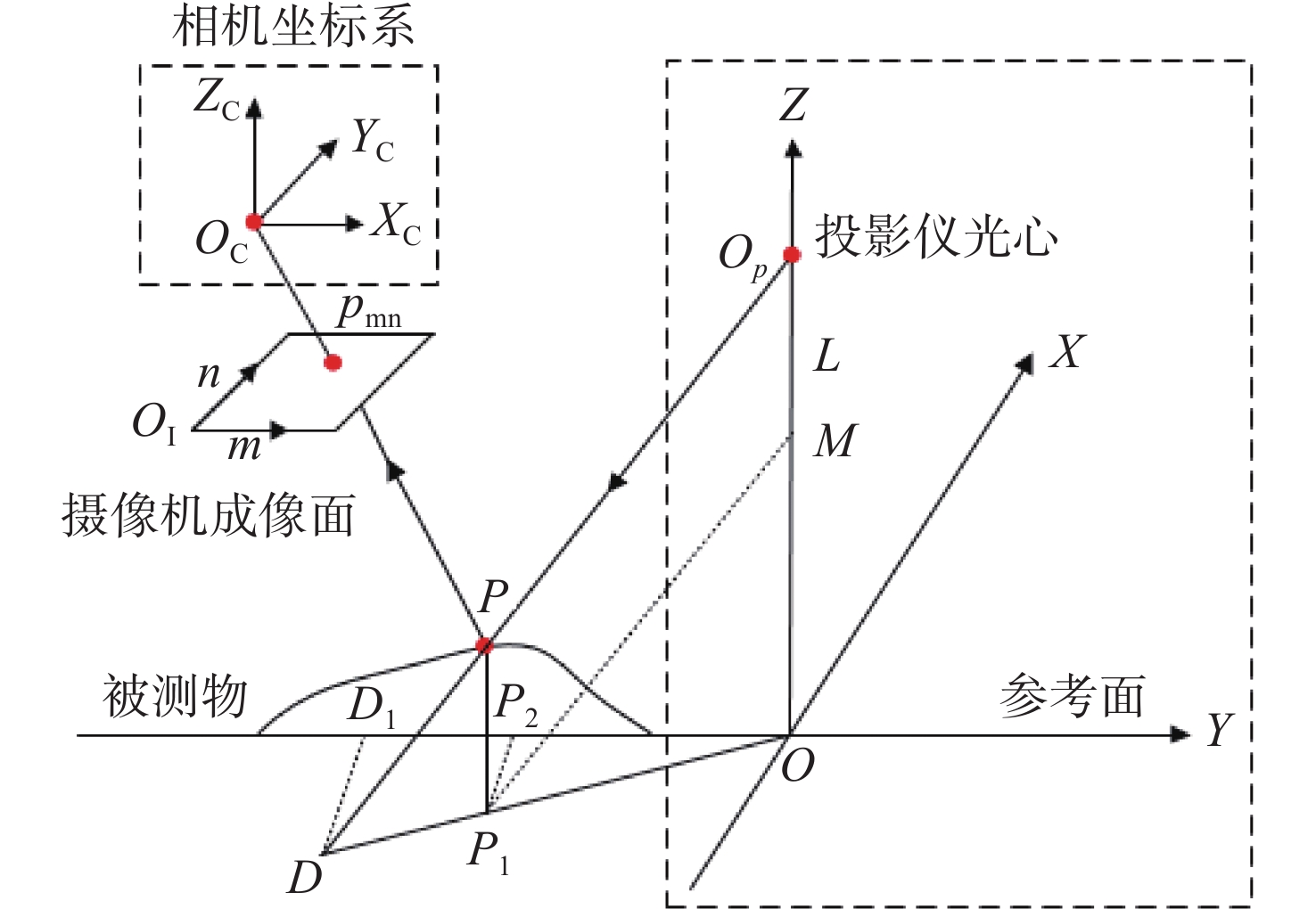
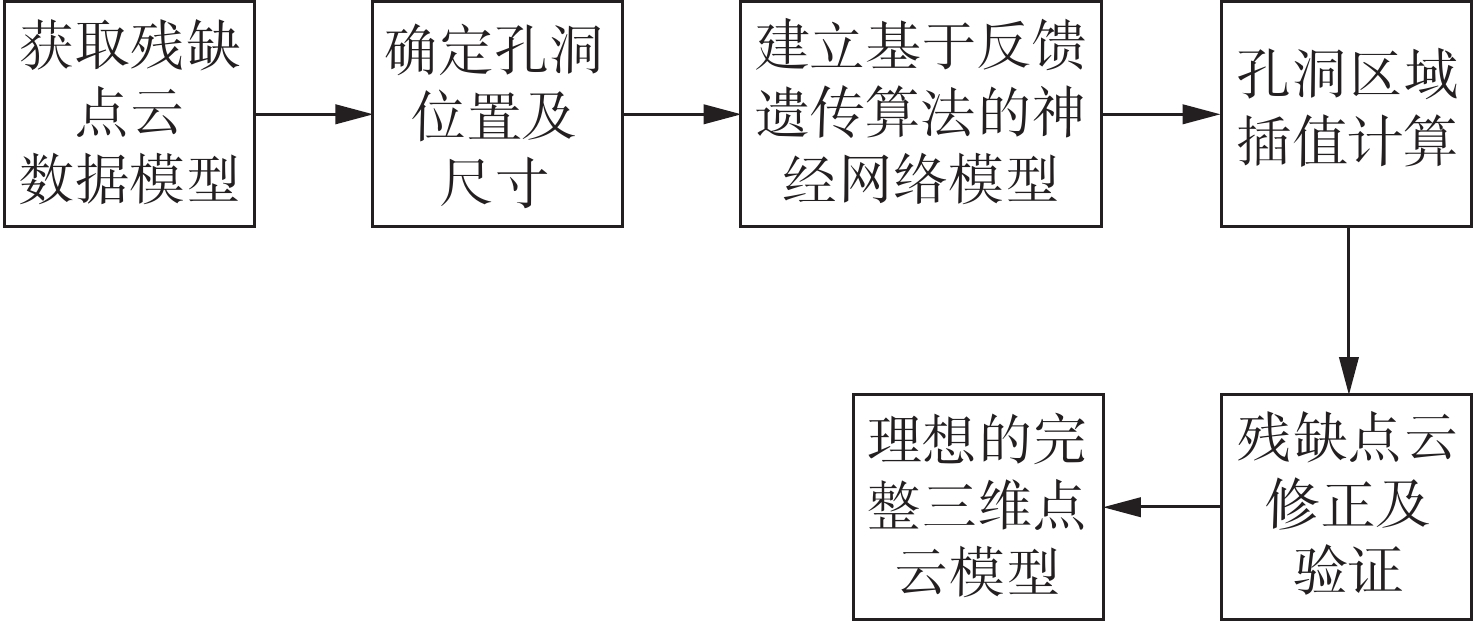
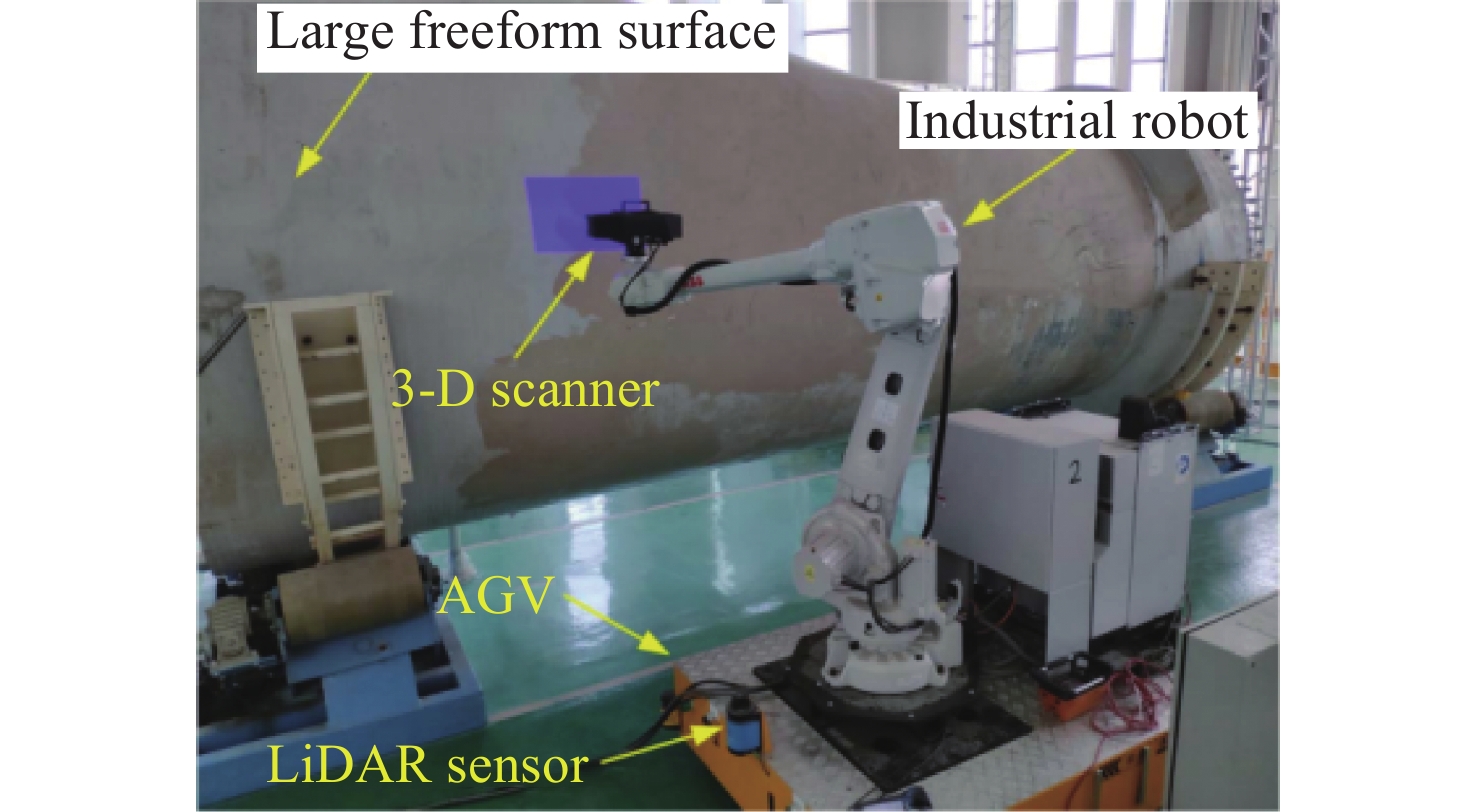
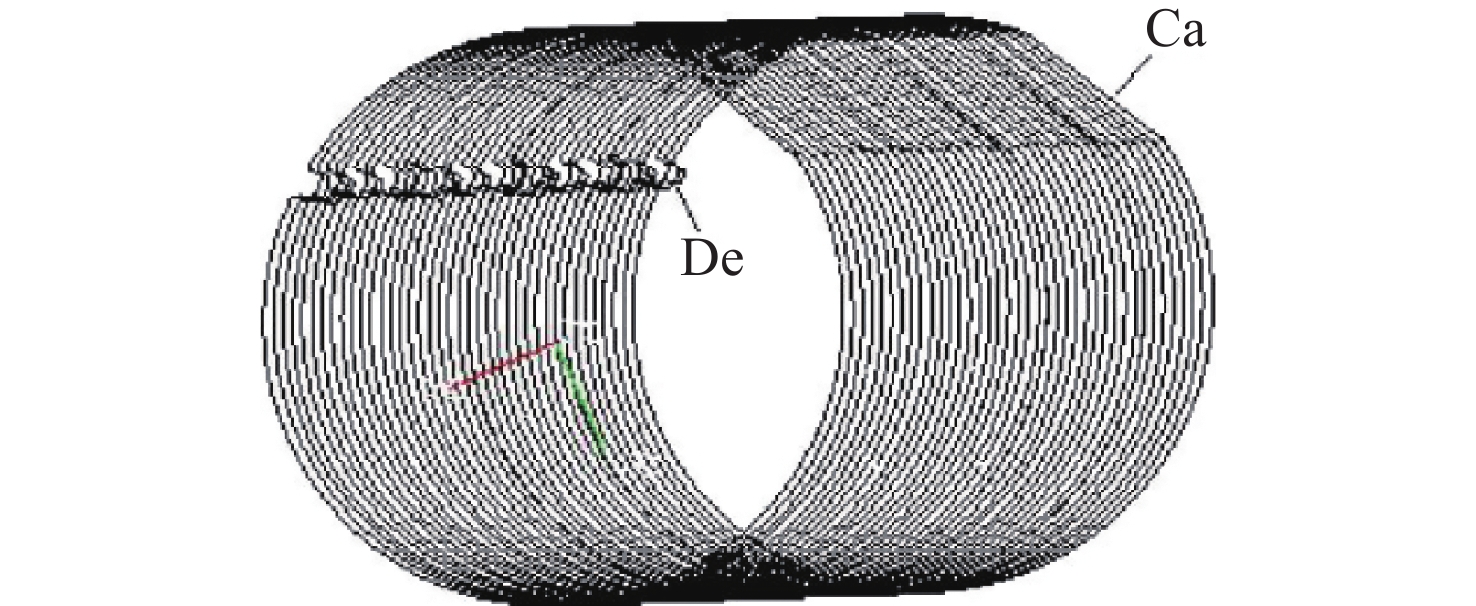
基于视觉的测量方式对航天、军工以及电子芯片等先进制造领域具有良好应用前景以及深远的发展意义,而基于结构光的在机三维视觉检测技术,是目前精密加工领域的热点与难点之一。本文以结构光在机三维测量流程为主线,将其中的关键技术,包括测量标定、相位优化求解、在机三维点云处理及不同特征曲面重构中的技术要求、涉及的方法和原理、相关研究现状及目前存在的问题,进行论述与总结。最后,根据未来相关技术的实际需求,在加工现场标定、动态实时三维重构、亚微米及纳米级测量、测量-加工一体化数据传输技术等方面进行了展望,并提出了相应的研究思路。






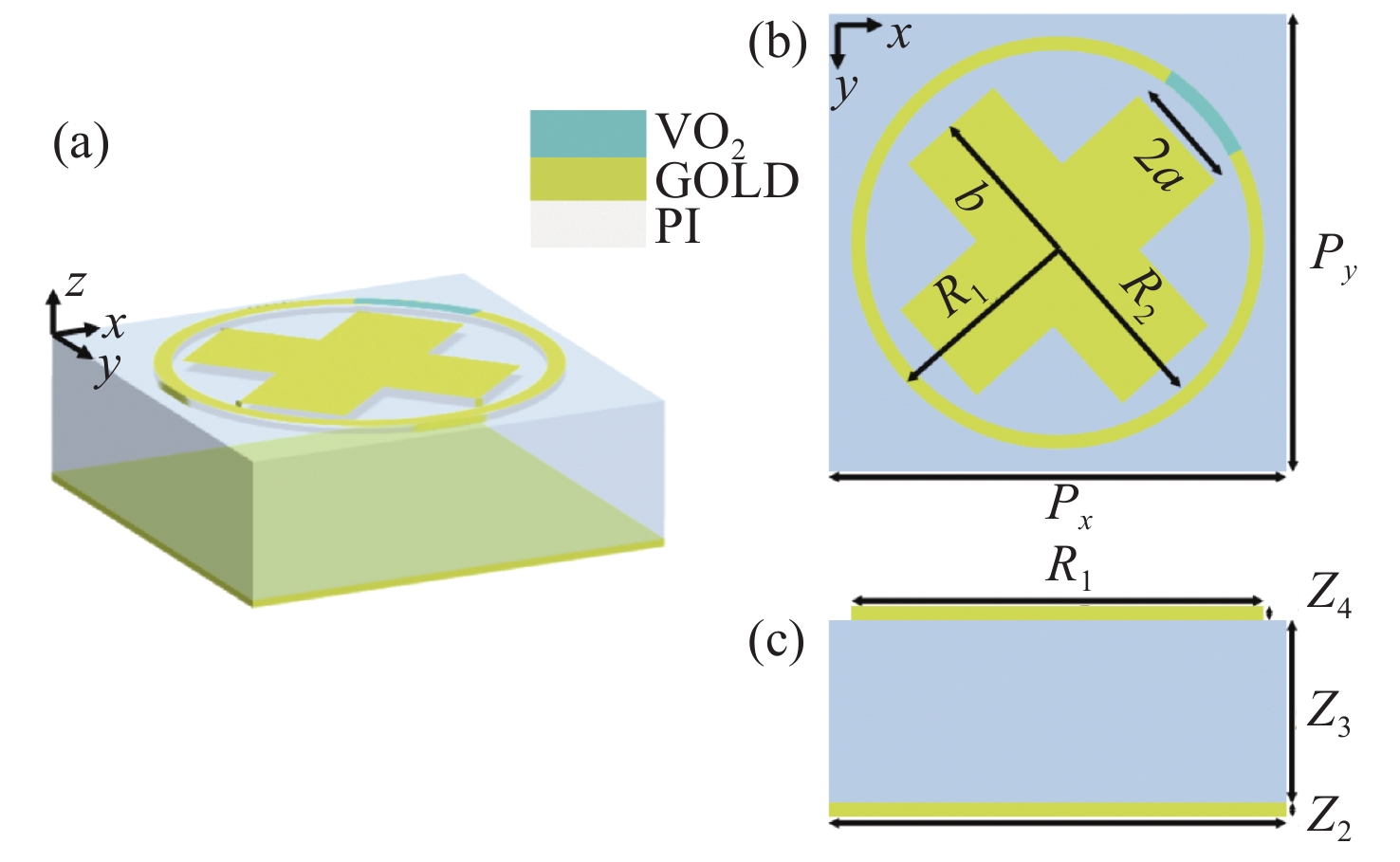
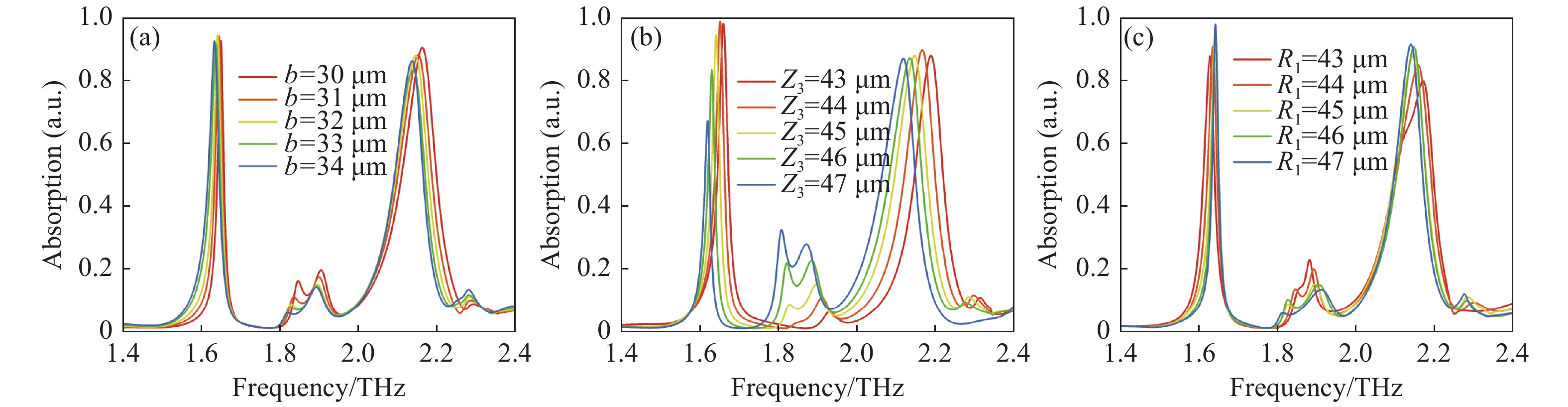
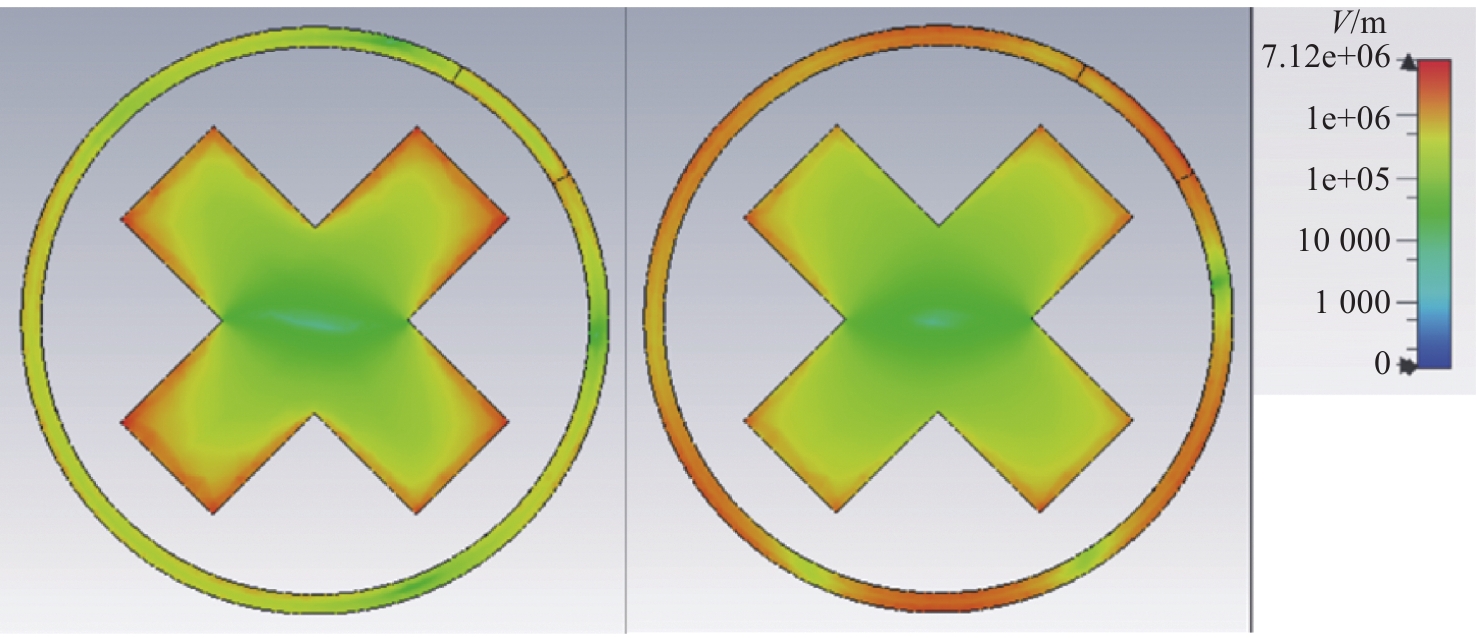
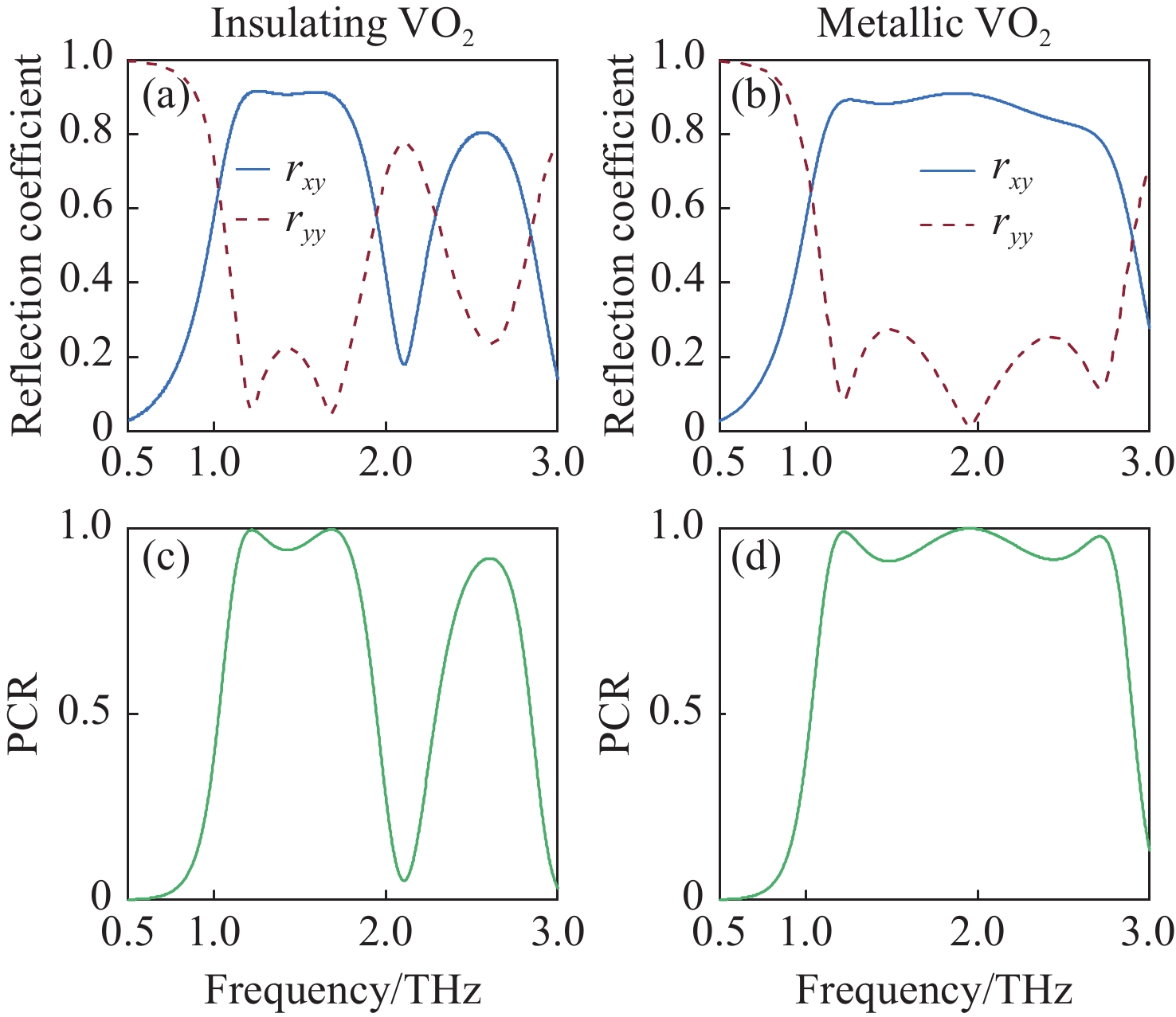
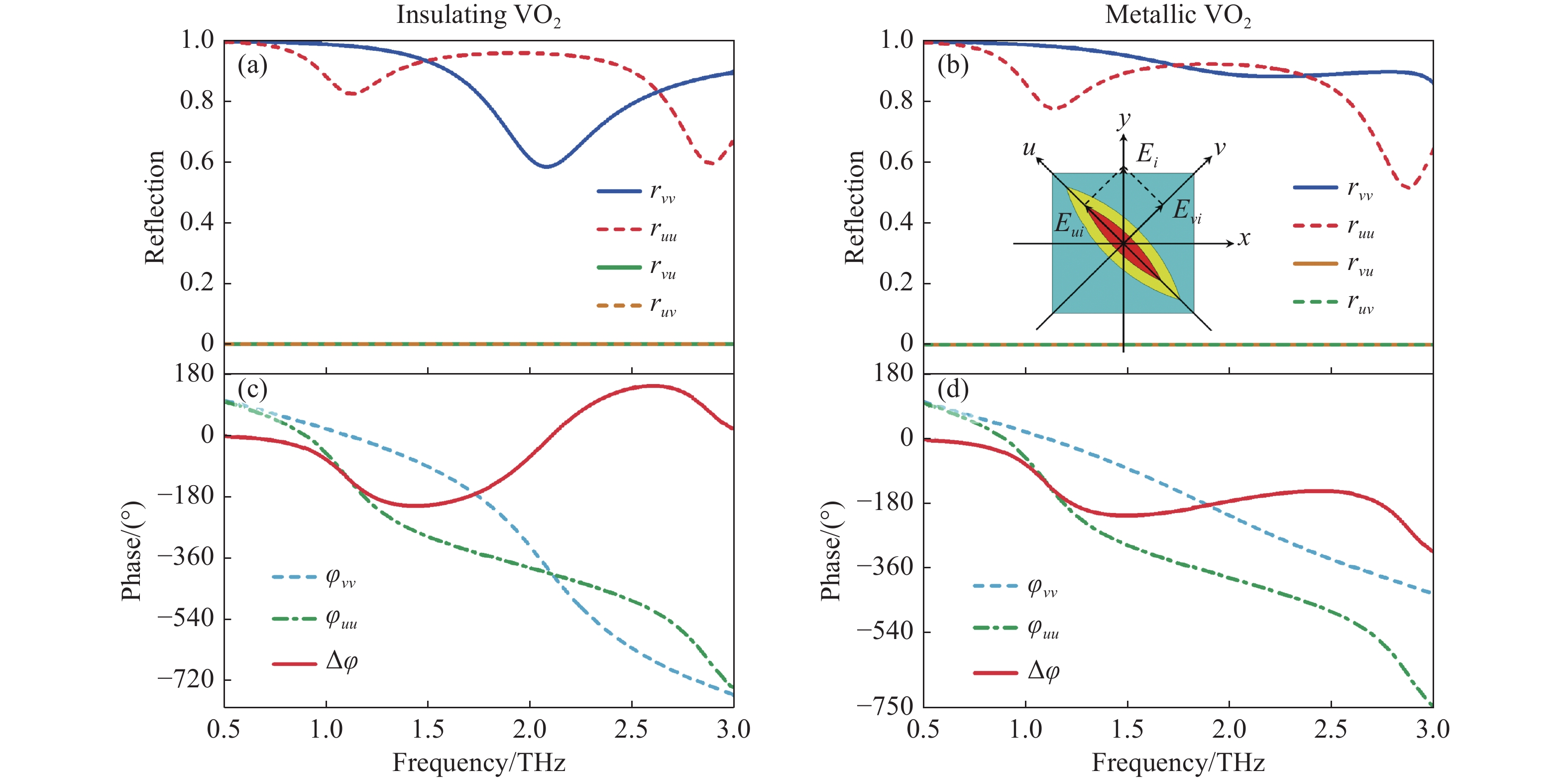
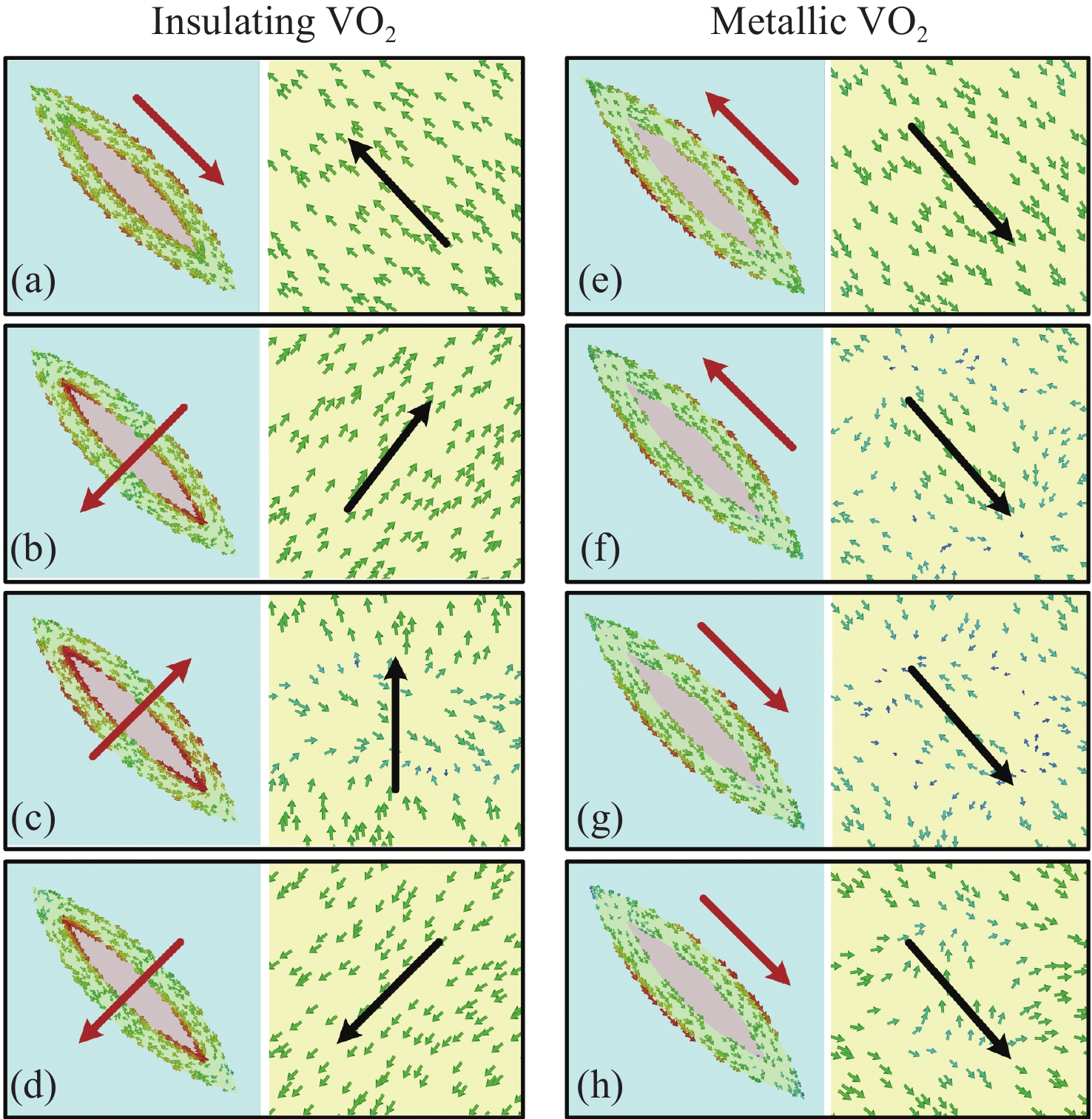
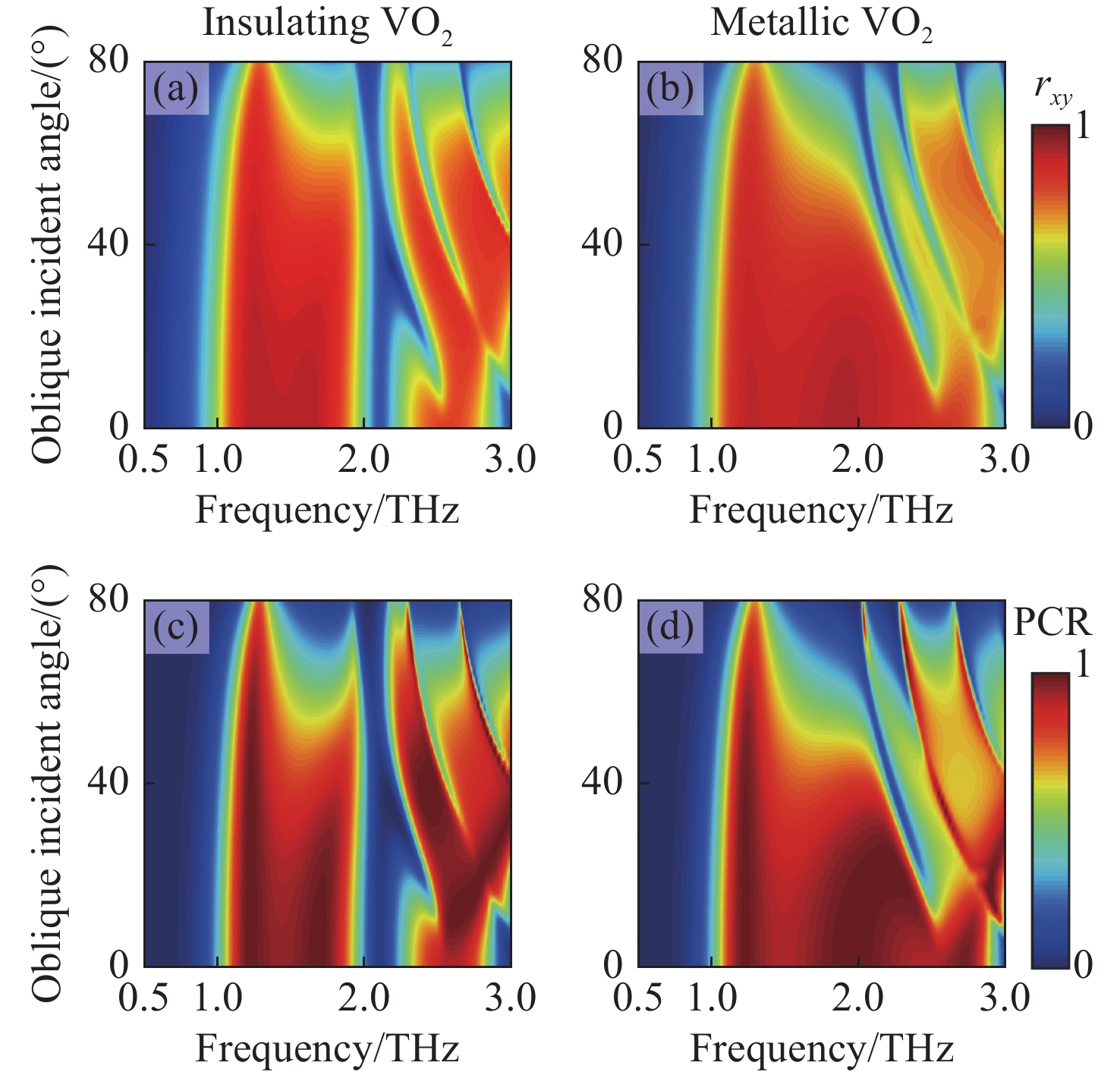
本文提出了一种基于二氧化钒(VO2)相变特性的开口谐振环结构多功能超材料器件。该器件由VO2填充的开口谐振环和中心放置十字的顶层、聚酰亚胺(PI)介质层和金属基底构成。VO2在绝缘态时,可以实现交叉极化转换功能,在0.48~0.87 THz范围内,偏振转换率大于90%。当VO2为金属态时,该器件能够实现双频吸收和高灵敏度传感功能。在1.64 THz和2.15 THz频率处的吸收率大于88%。通过改变样品材料的折射率,两个频率点处的传感灵敏度分别约为25.6 GHz/RIU和159 GHz/RIU,品质因子Q分别为71.34和23.12。所提出的超材料多功能器件具有结构简单、可切换功能和高效率极化转换等特性,在未来太赫兹通信、成像等领域都有潜在的应用价值。






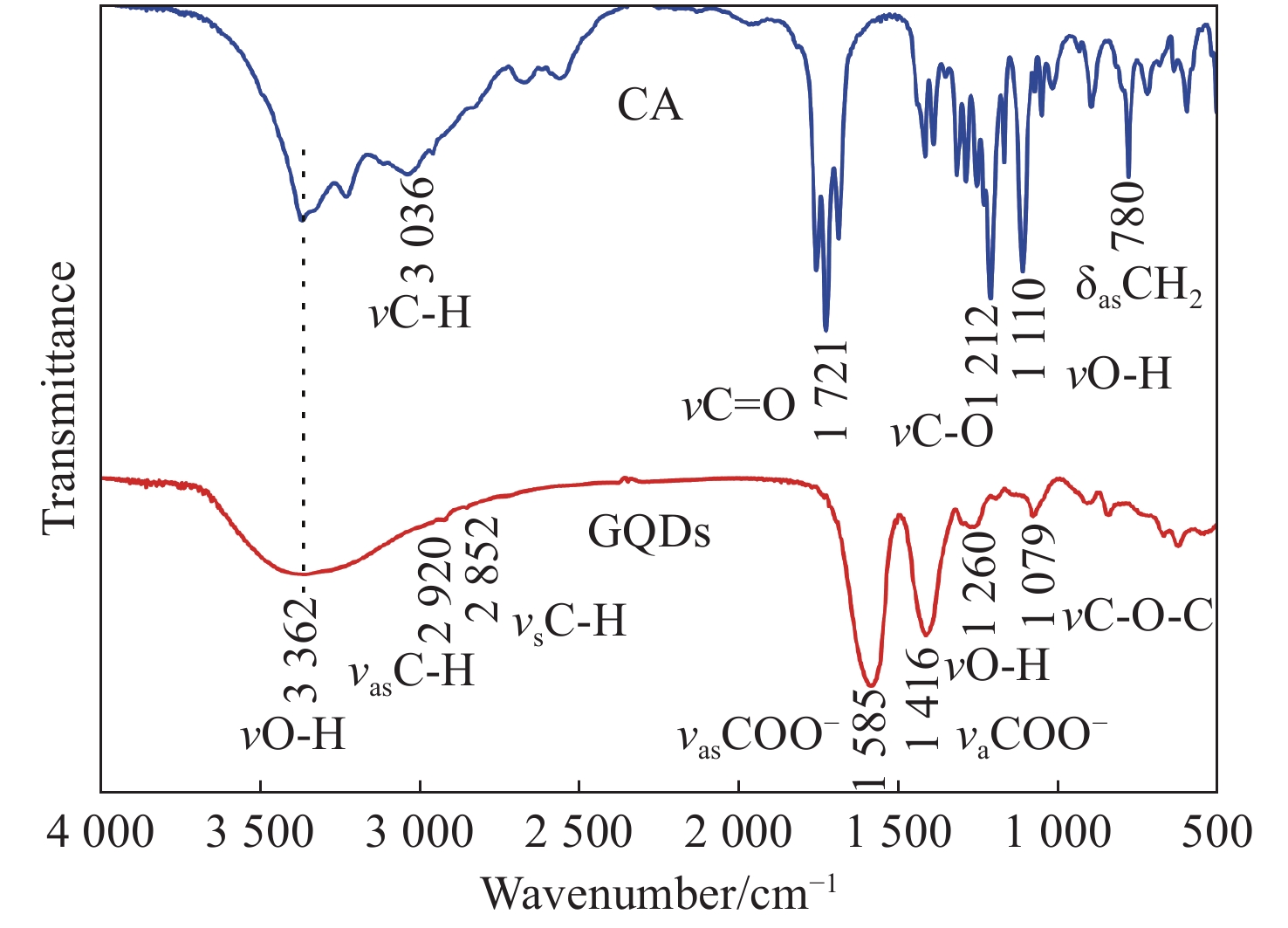
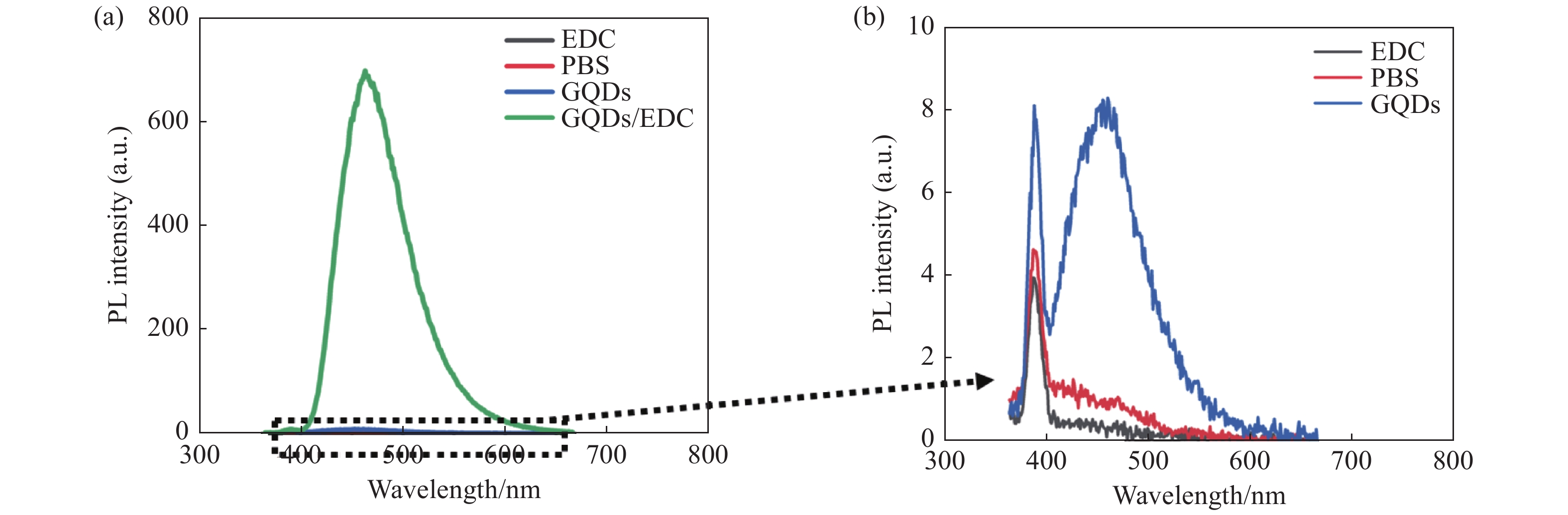
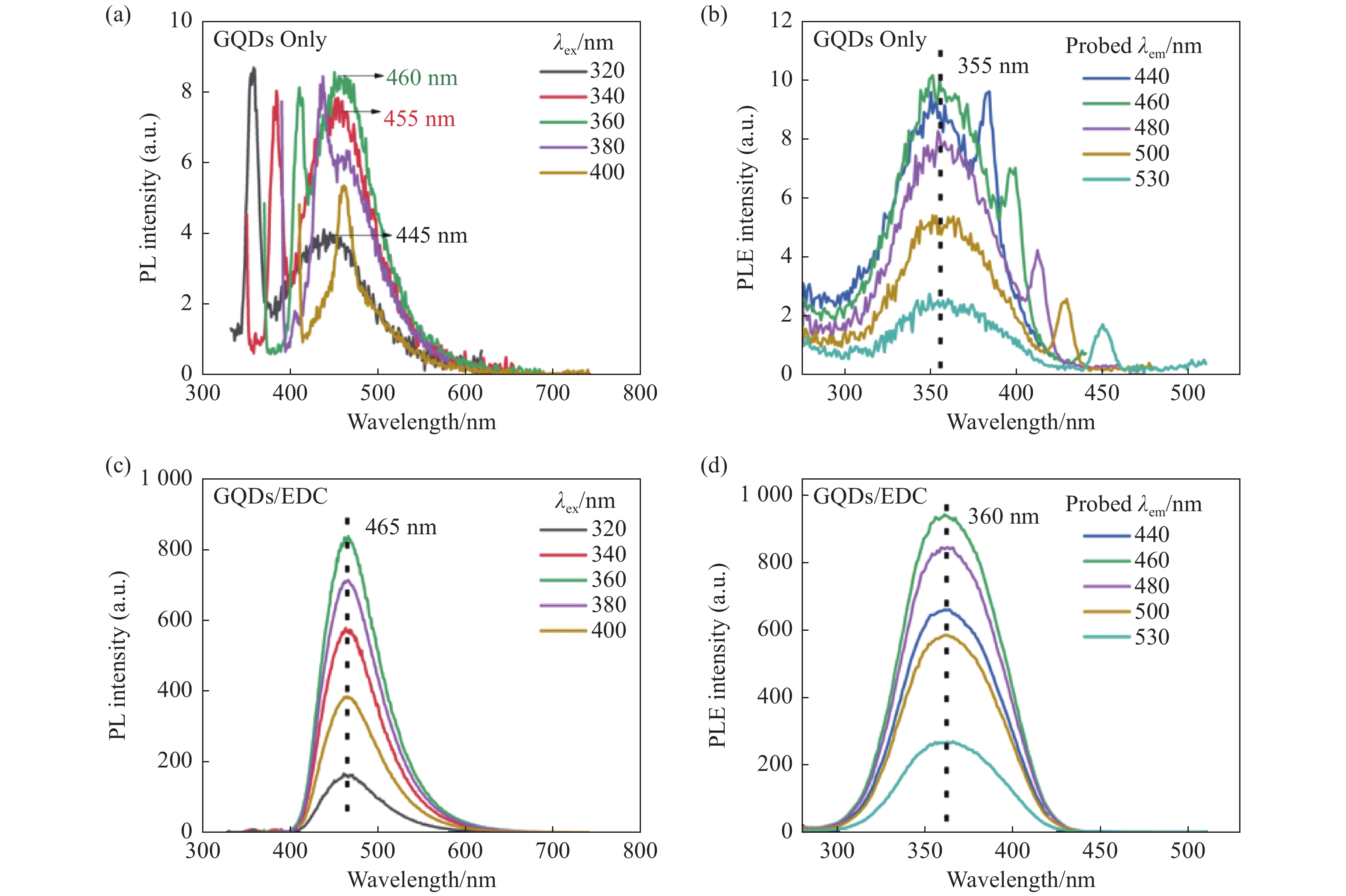
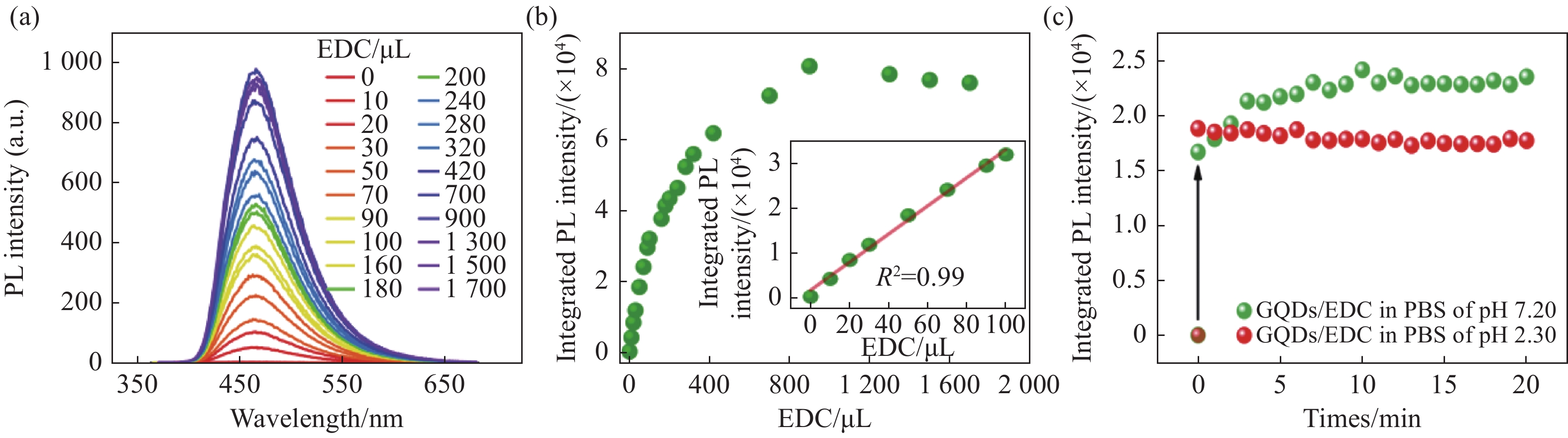
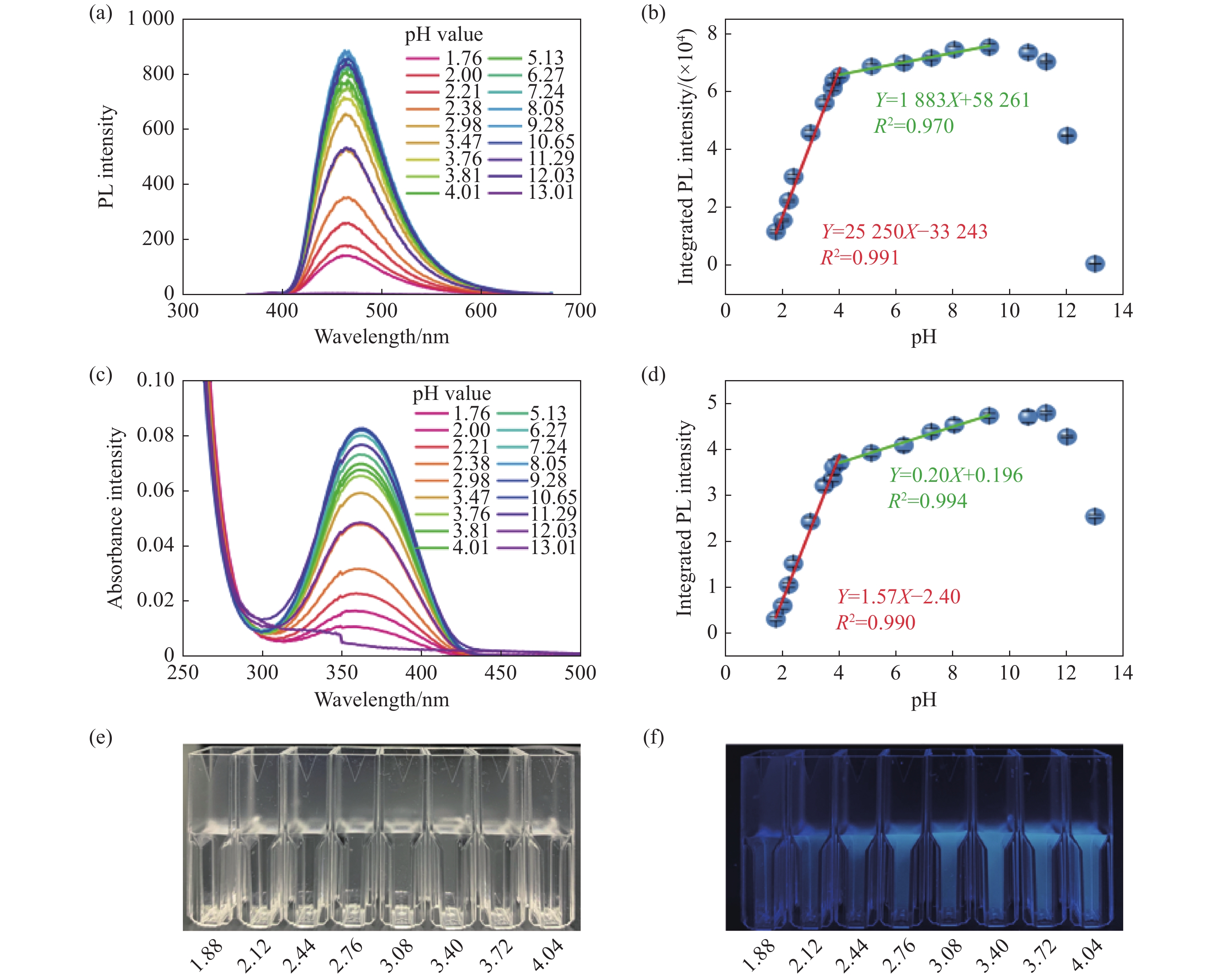
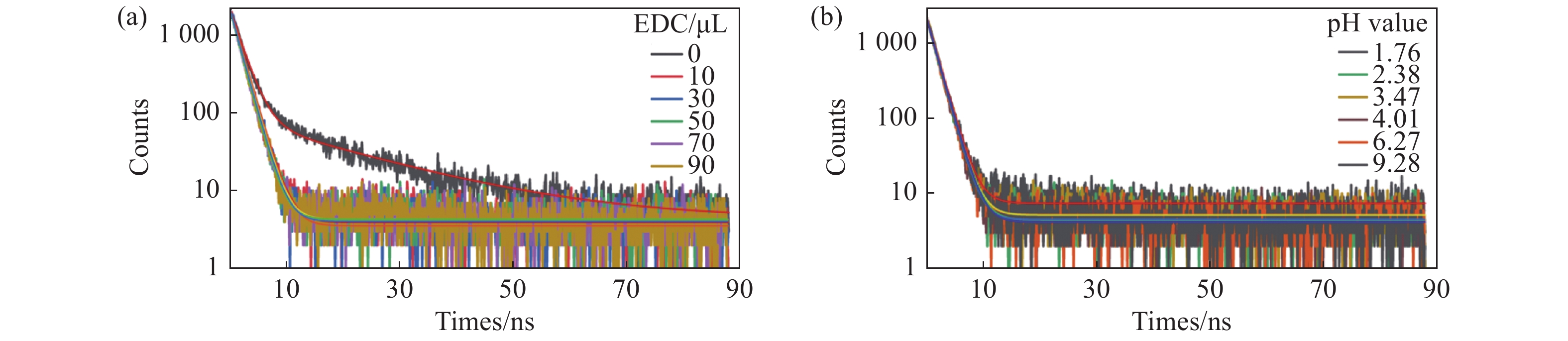
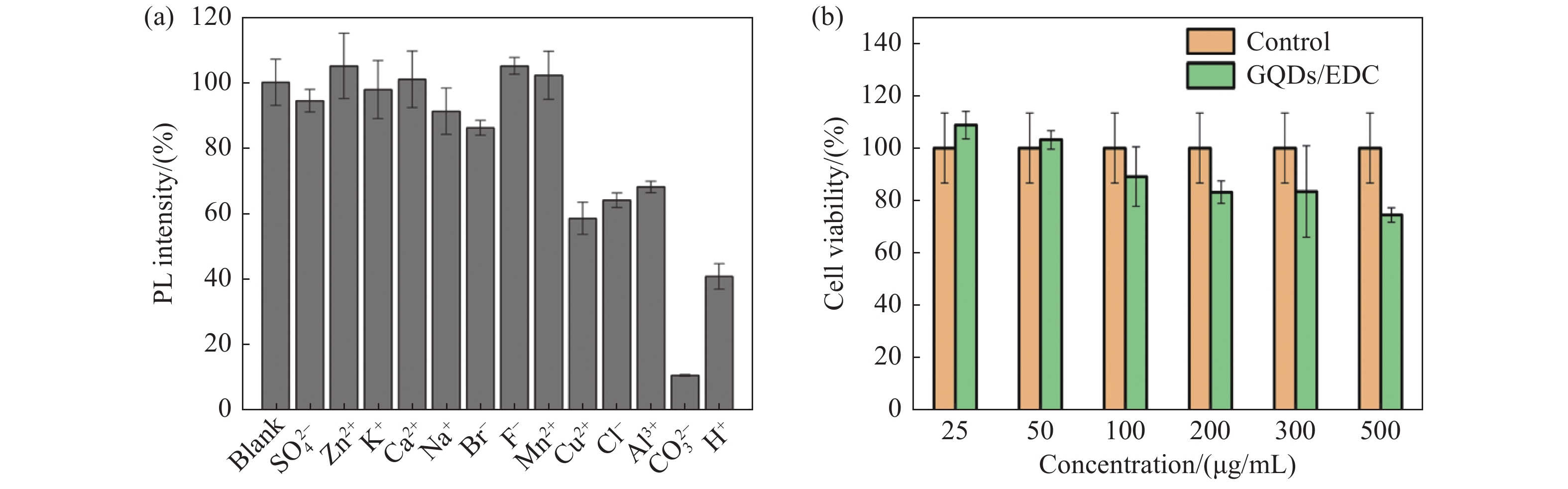
本文详细研究了交联剂1-乙基-3-(3-二甲基氨基丙基)碳二亚胺盐酸盐(EDC)对石墨烯量子点(GQDs)光学性质的影响及原因。采用水热法制备了GQDs,并与EDC反应得到GQDs/EDC复合物,对GQDs和GQDs/EDC的光谱特性进行研究。使用PBS溶液以及人工胃液样品,研究pH对GQDs/EDC荧光影响规律及作用机理。实验结果表明:GQDs表面缺陷被EDC钝化,使得GQDs的荧光在小于1 min内迅速增强,并在5~20 min内保持稳定;相比单独GQDs,GQDs/EDC的荧光强度显著提升约264倍;pH响应实验表明,在pH值为1.75~4.01及4.01~9.28范围内,GQDs/EDC具有荧光和吸收强度线性响应规律。生物兼容性表明,在25~300 µg/mL样品浓度下,人乳腺癌细胞存活率均大于80%;同时,对人工胃液pH具有较高的检测准确性,其相对标准偏差RSD ≤ 1.10%。EDC介导的荧光增强,使GQDs在检测、传感、成像等领域更具优势。同时,GQDs/EDC灵敏的pH响应特性使其在pH值检测应用中具有良好前景。


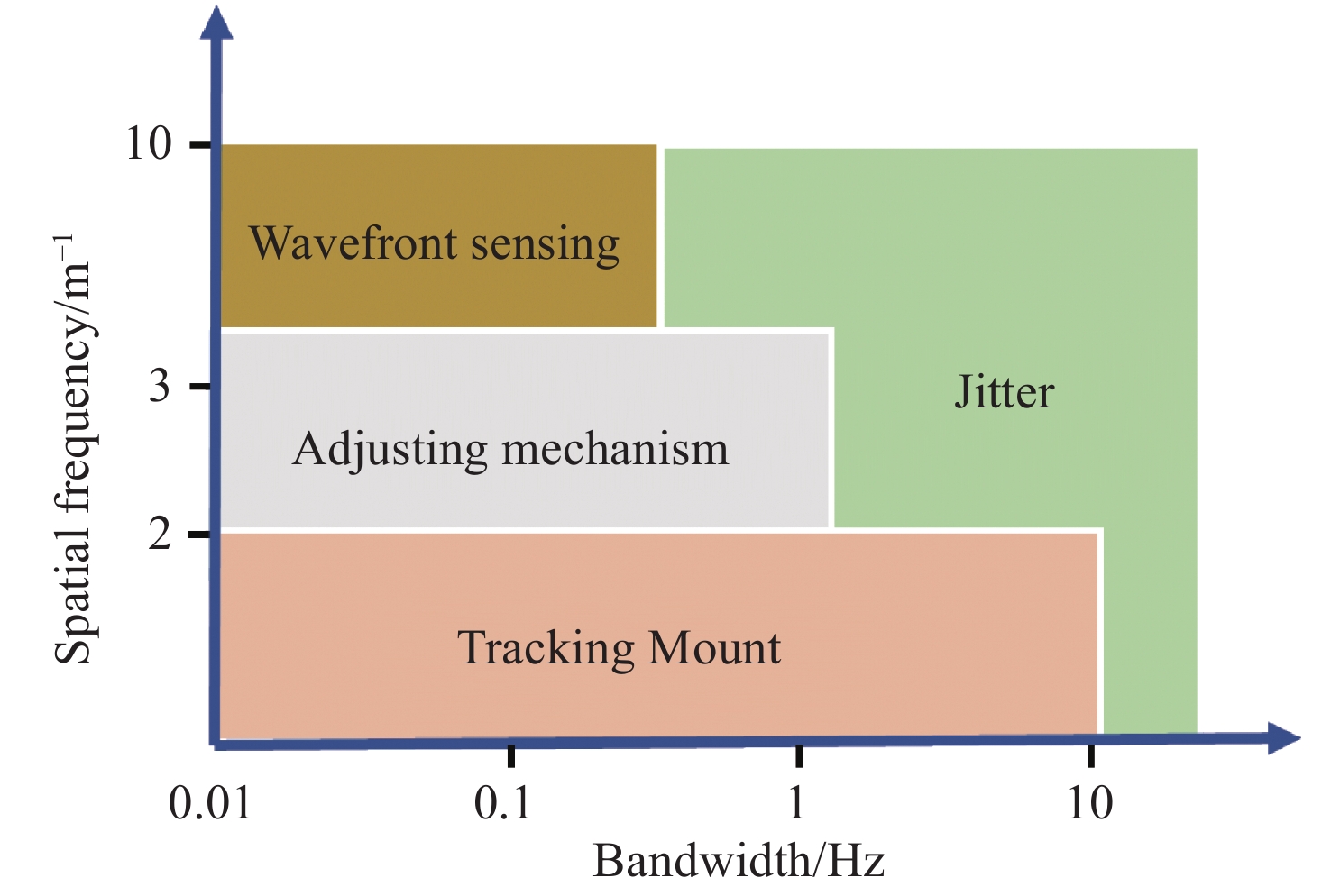
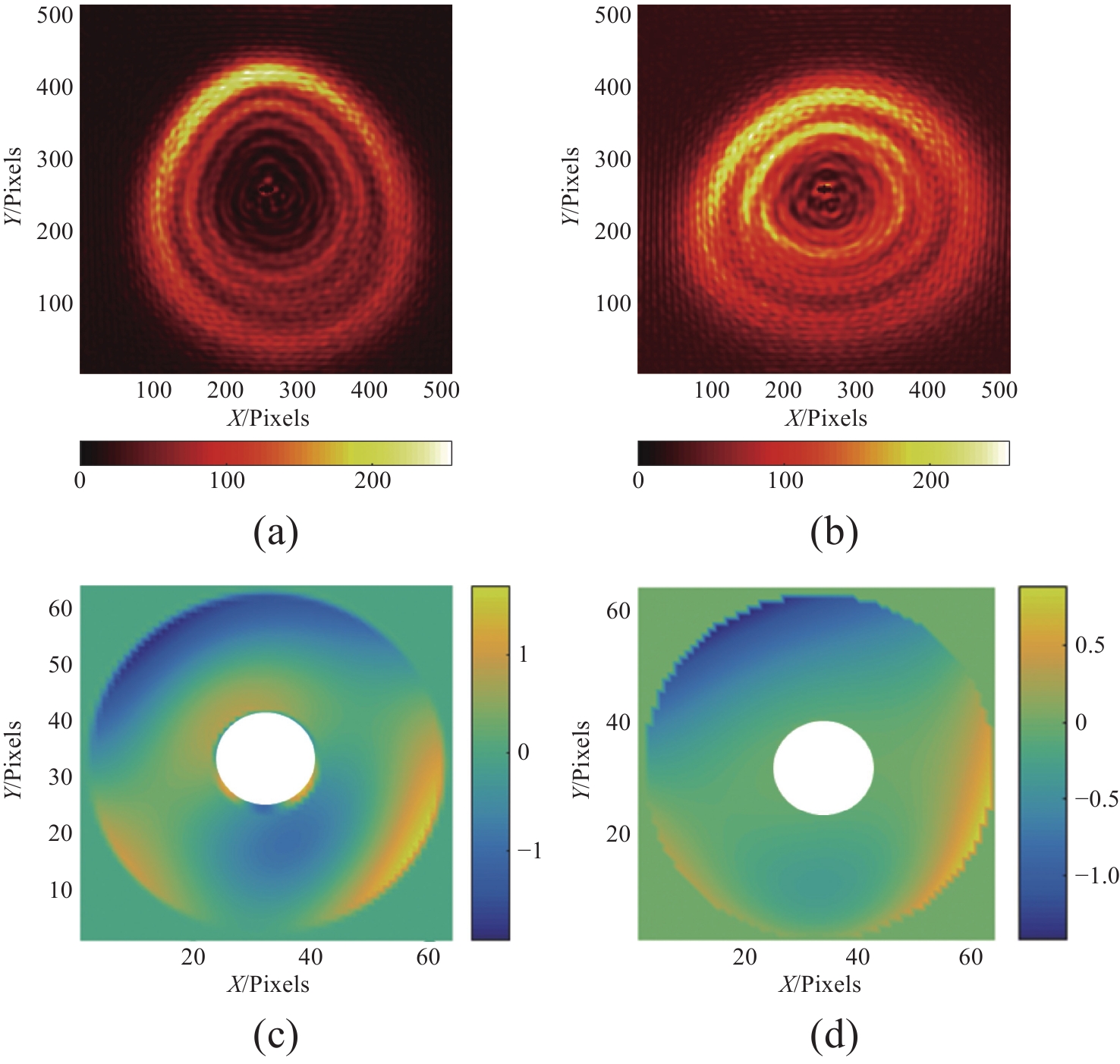
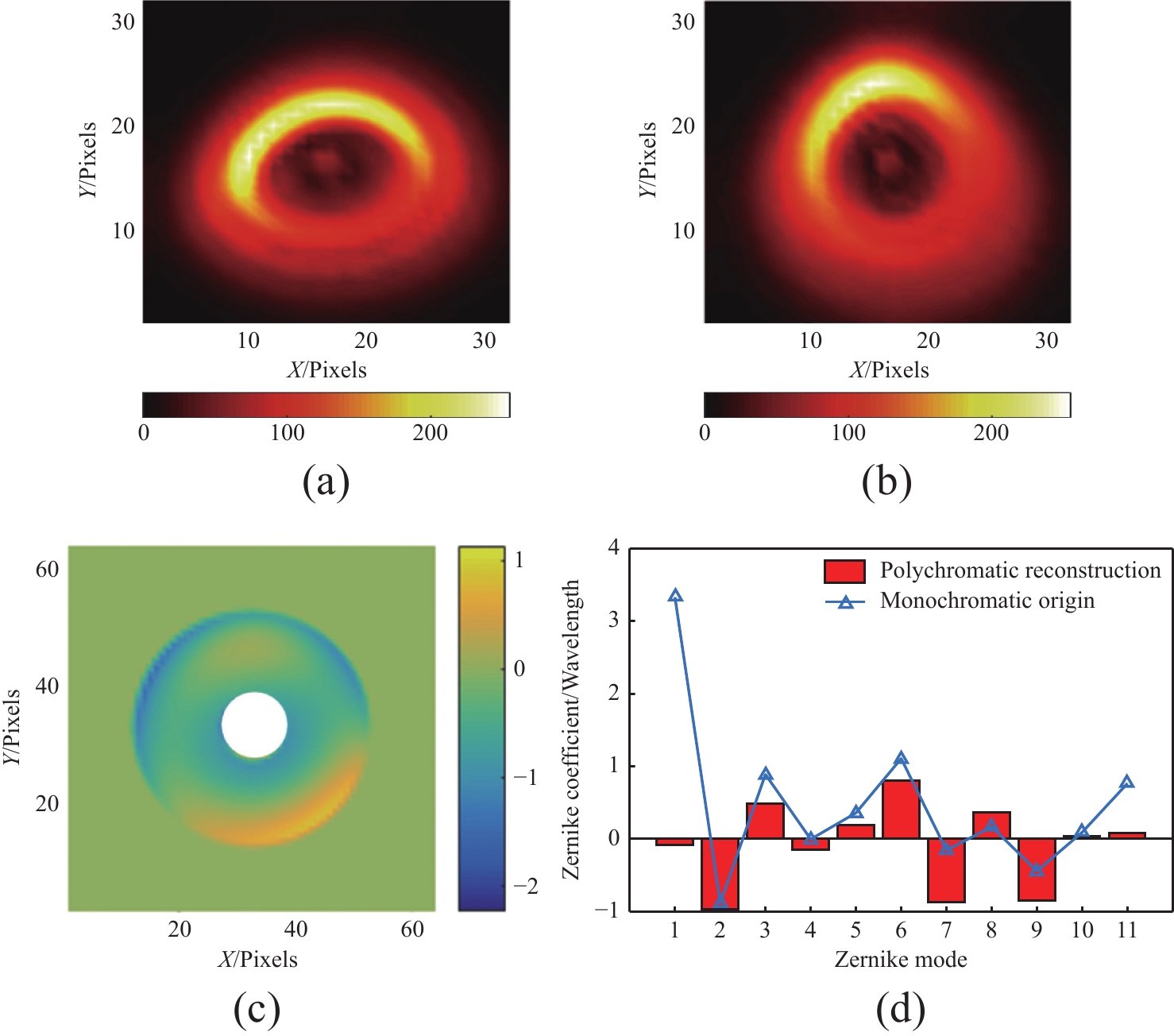
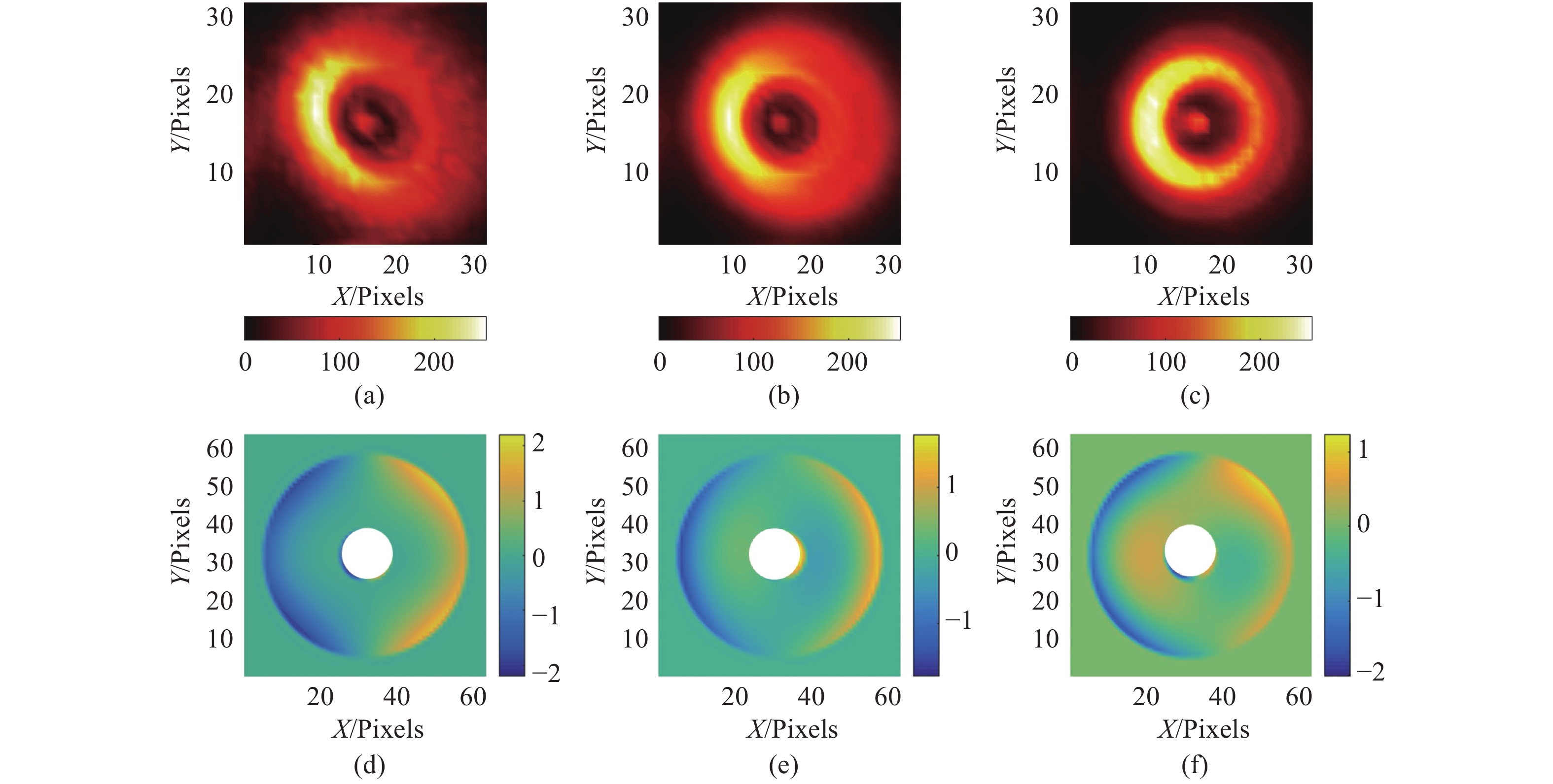
通过对望远镜进行曲率波前感知,以更好地实现主焦巡天望远镜的集成检测。首先,利用傅立叶光学理论分析了主焦巡天望远镜曲率传感过程以及多环节动态稳定性传递基本原理。其次,对主焦巡天望远镜集成检测中的静态校正与动面形测量过程进行误差分析。然后,分析了调节过程中的自由度锁定。最后,通过实验实现了集成检测过程的原理贯通。所获得的波前探测残差优于0.08


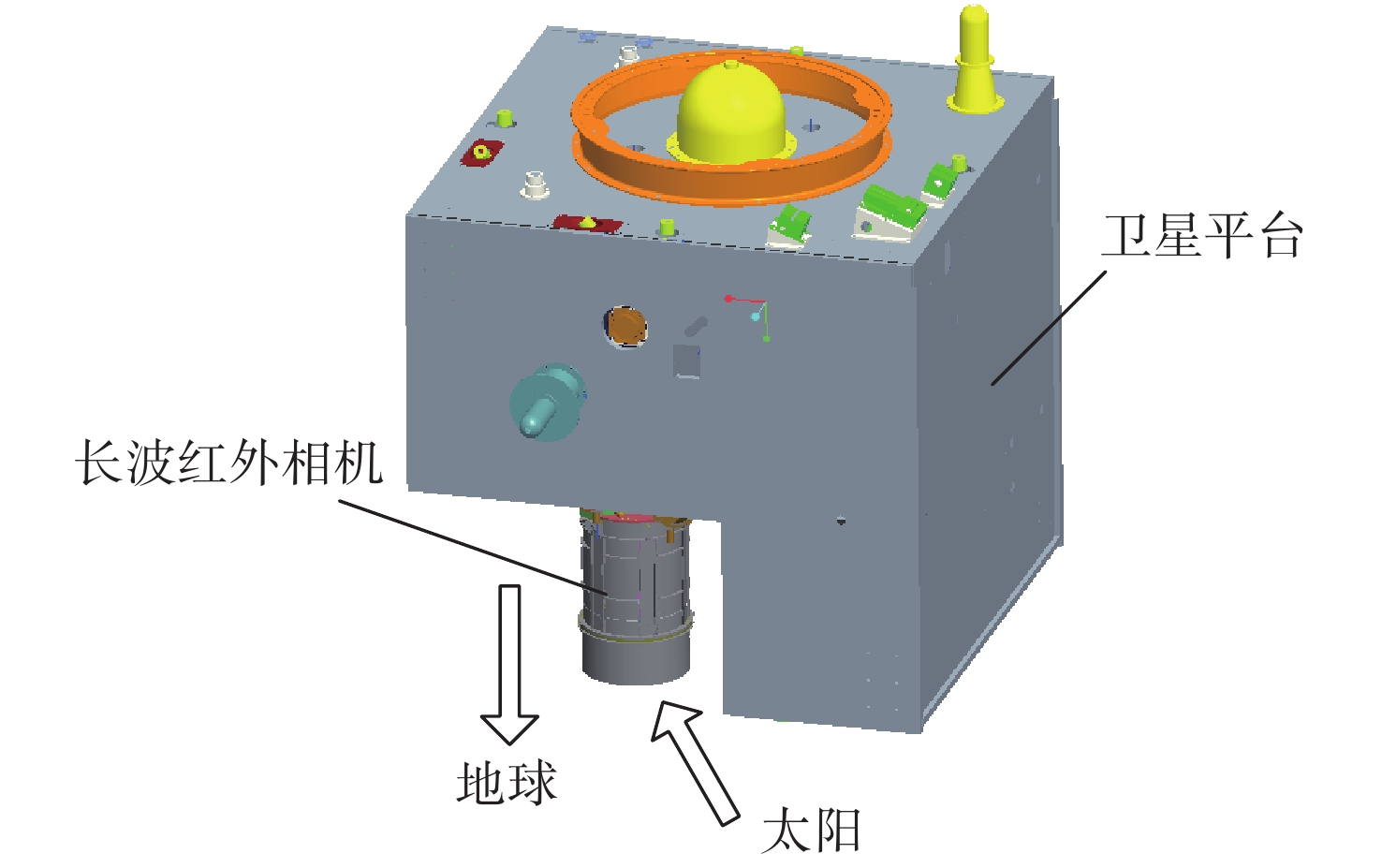
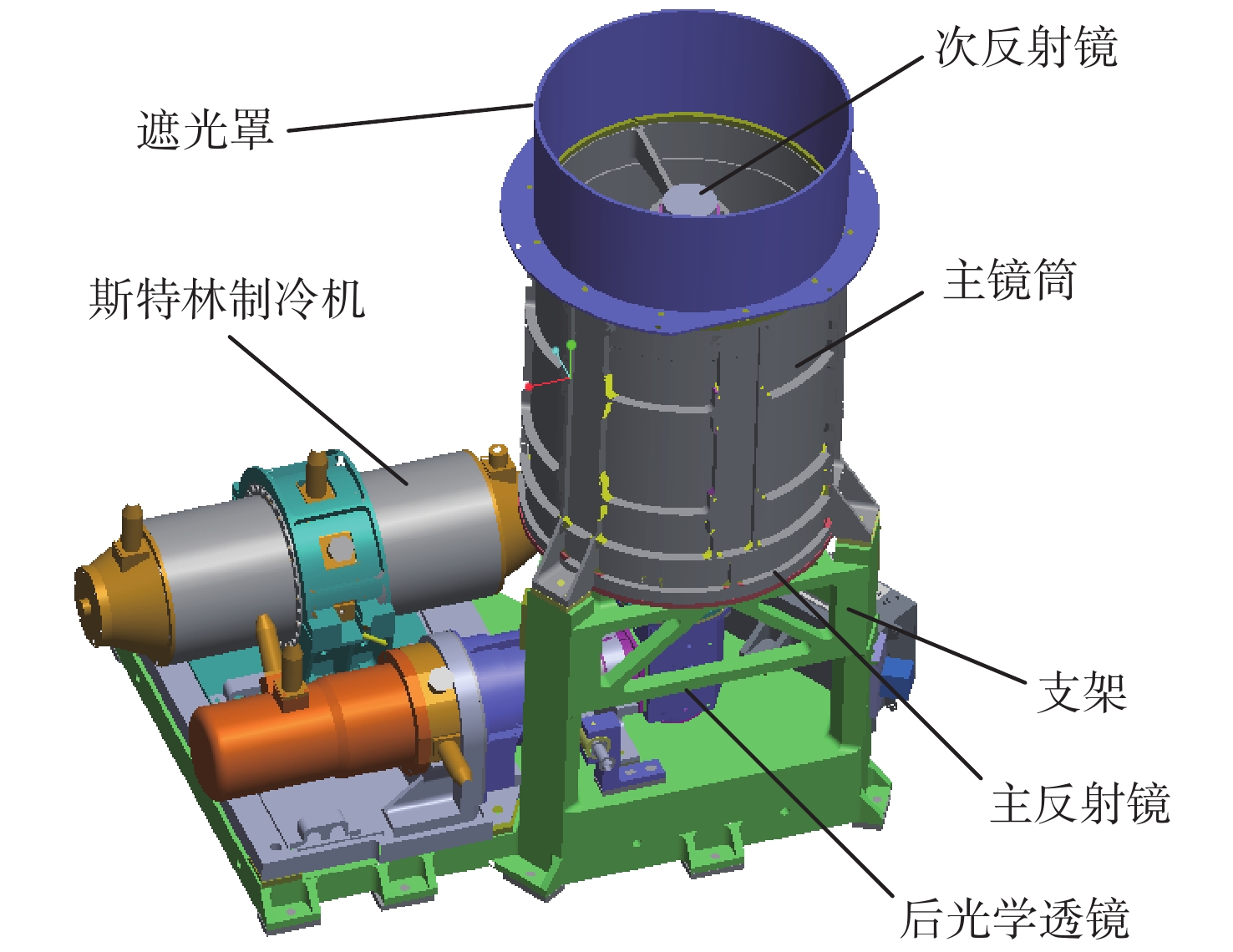
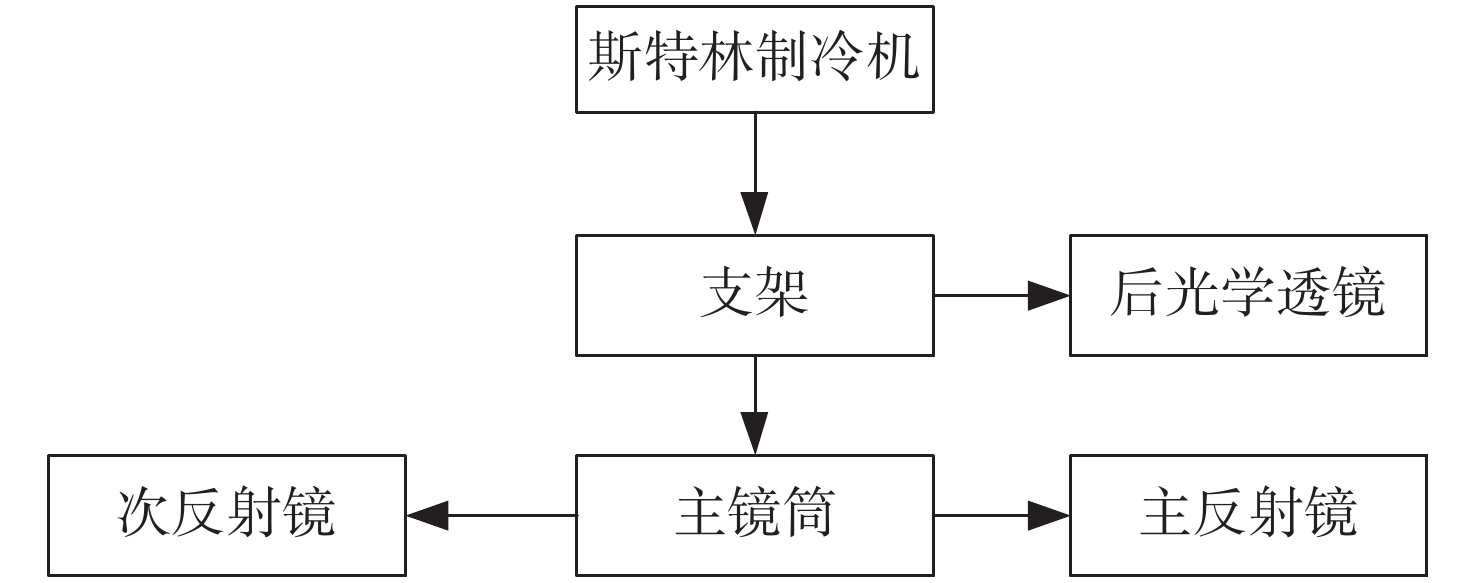
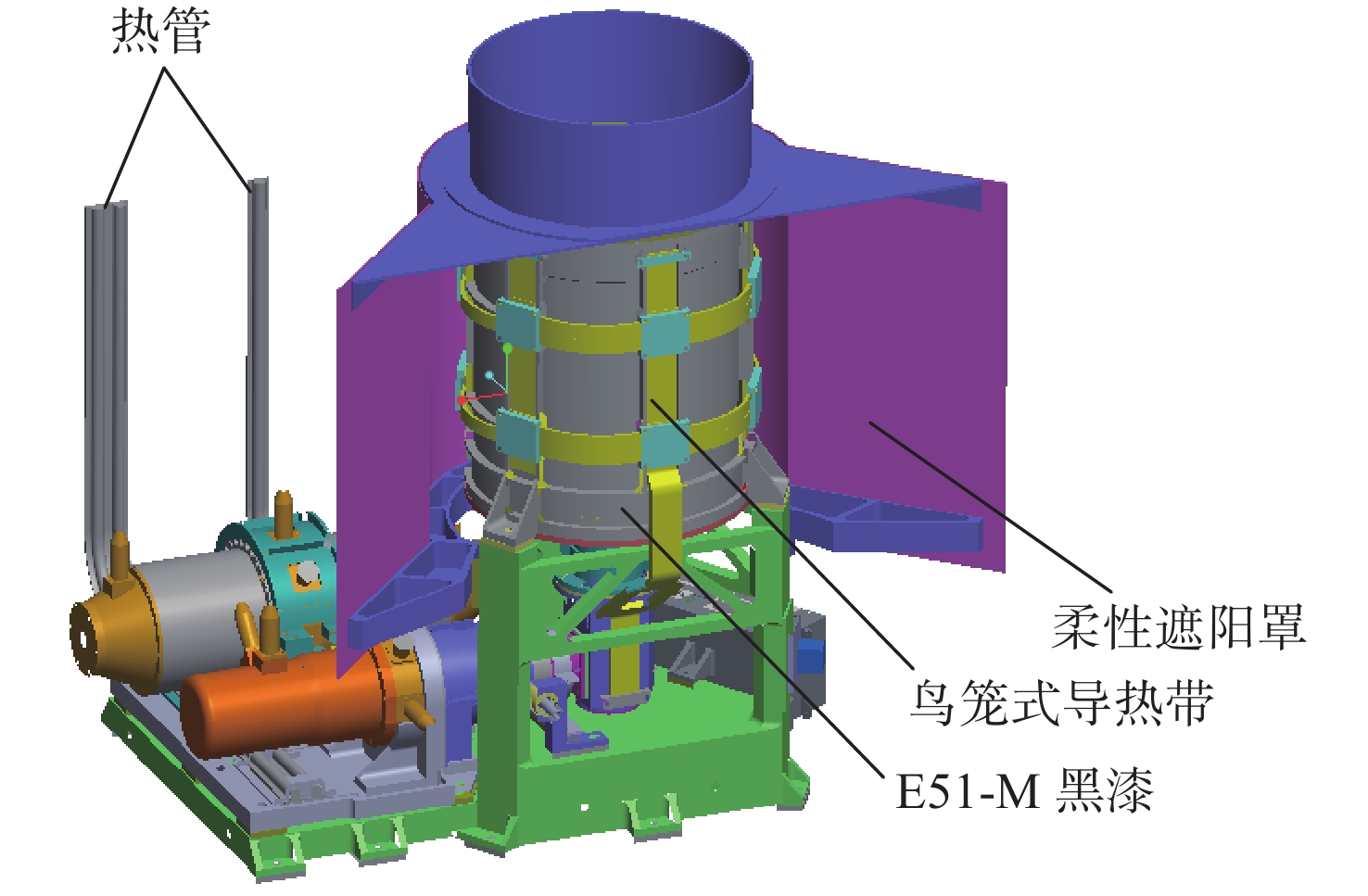
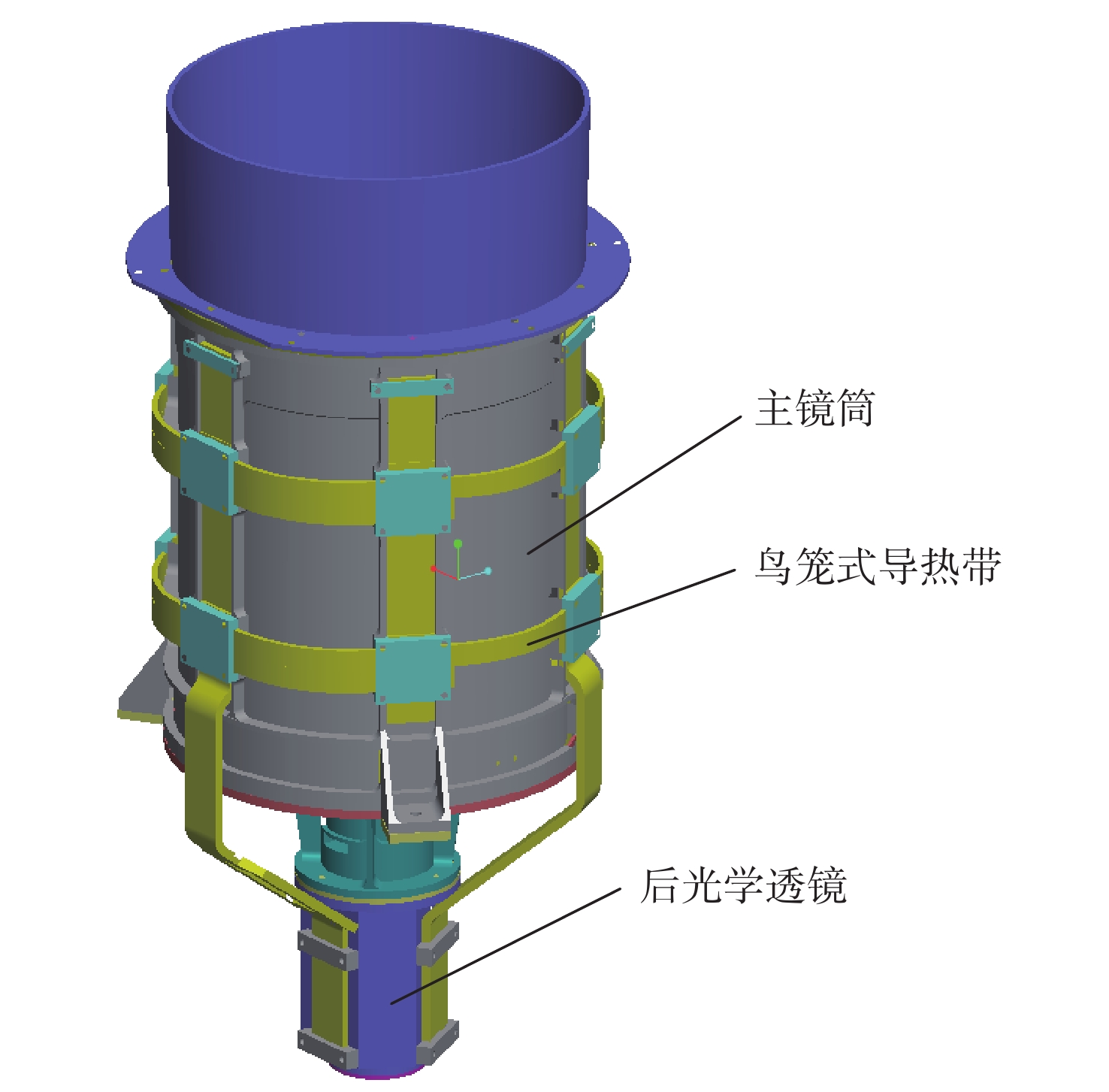
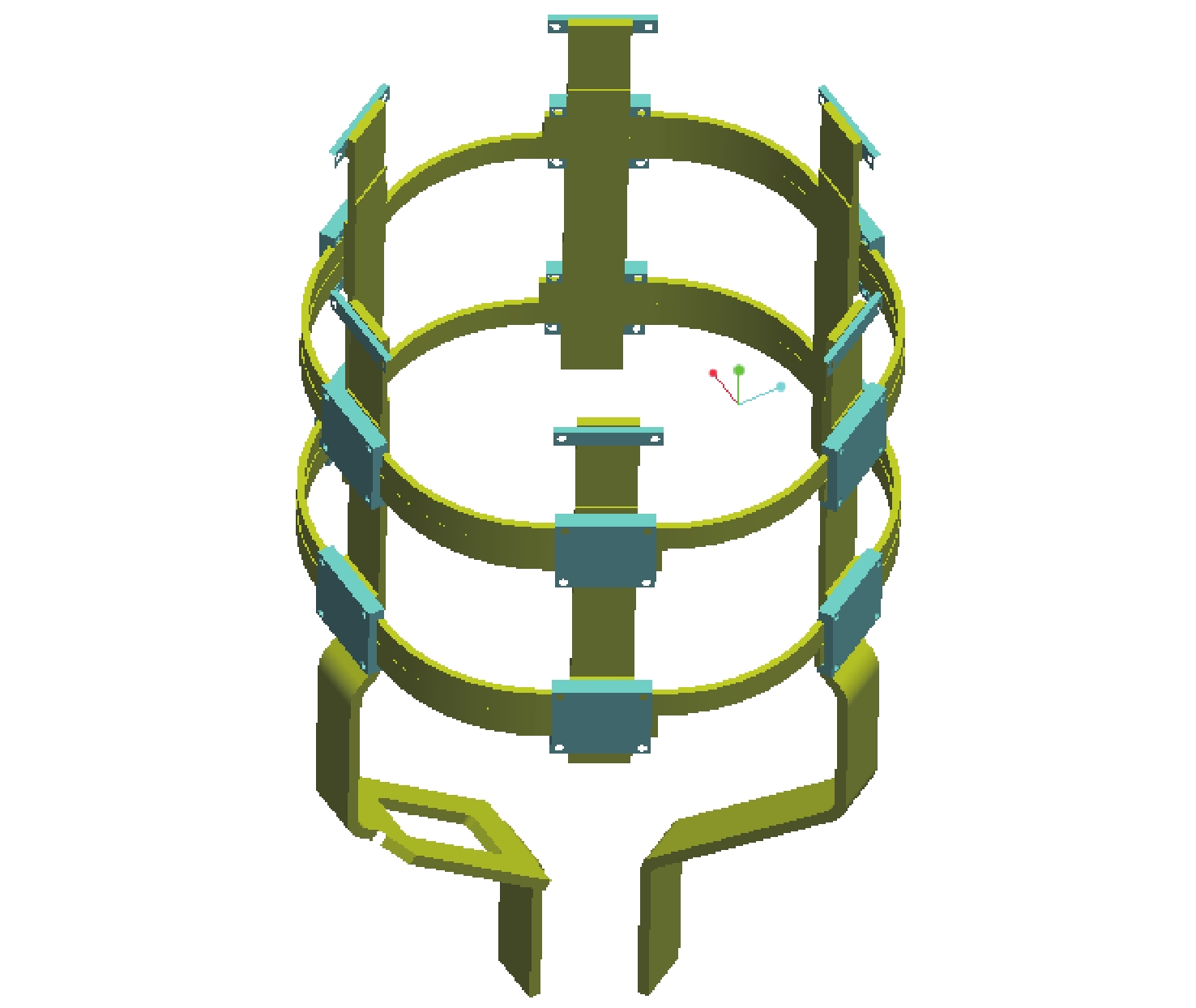
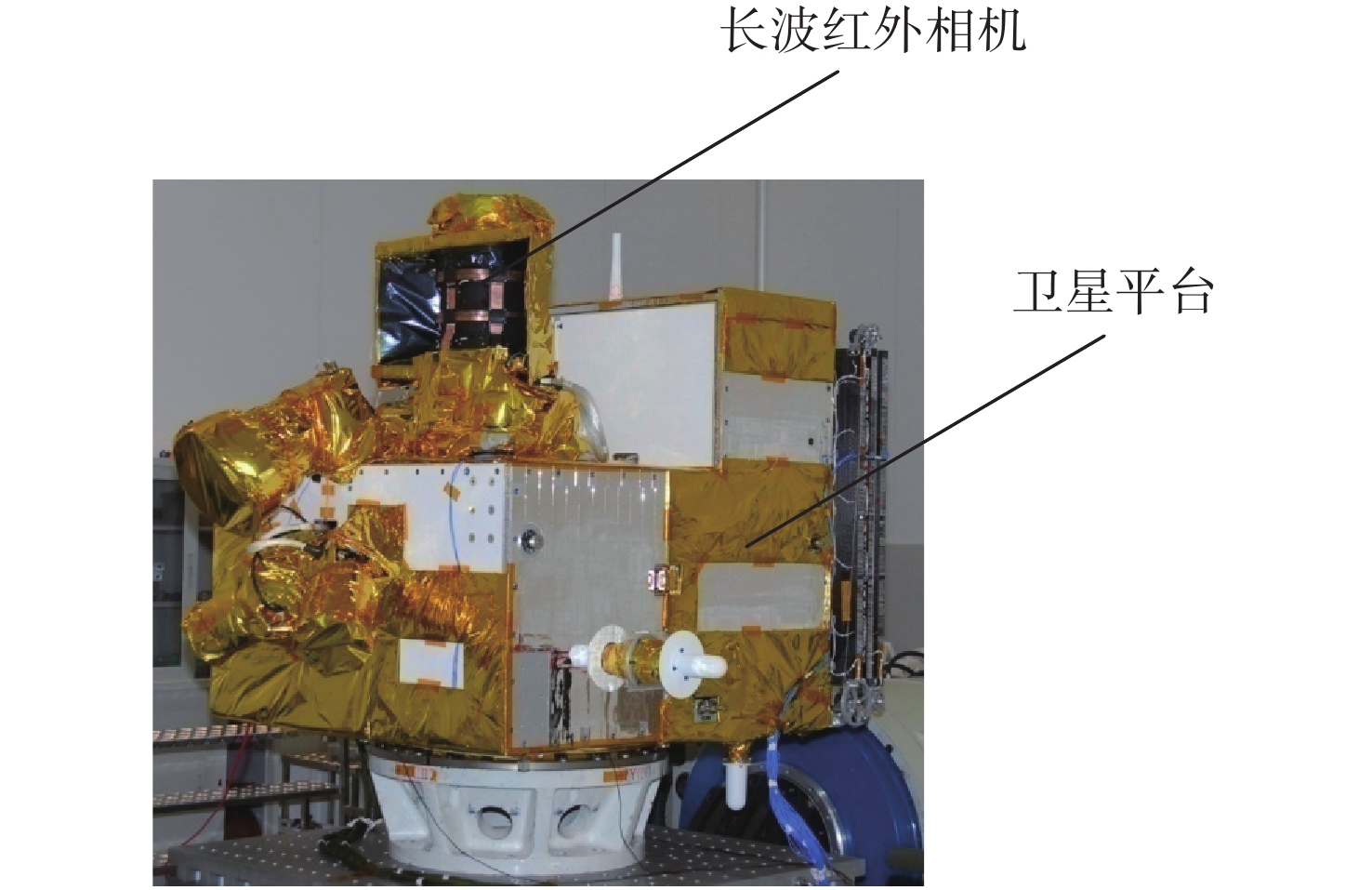
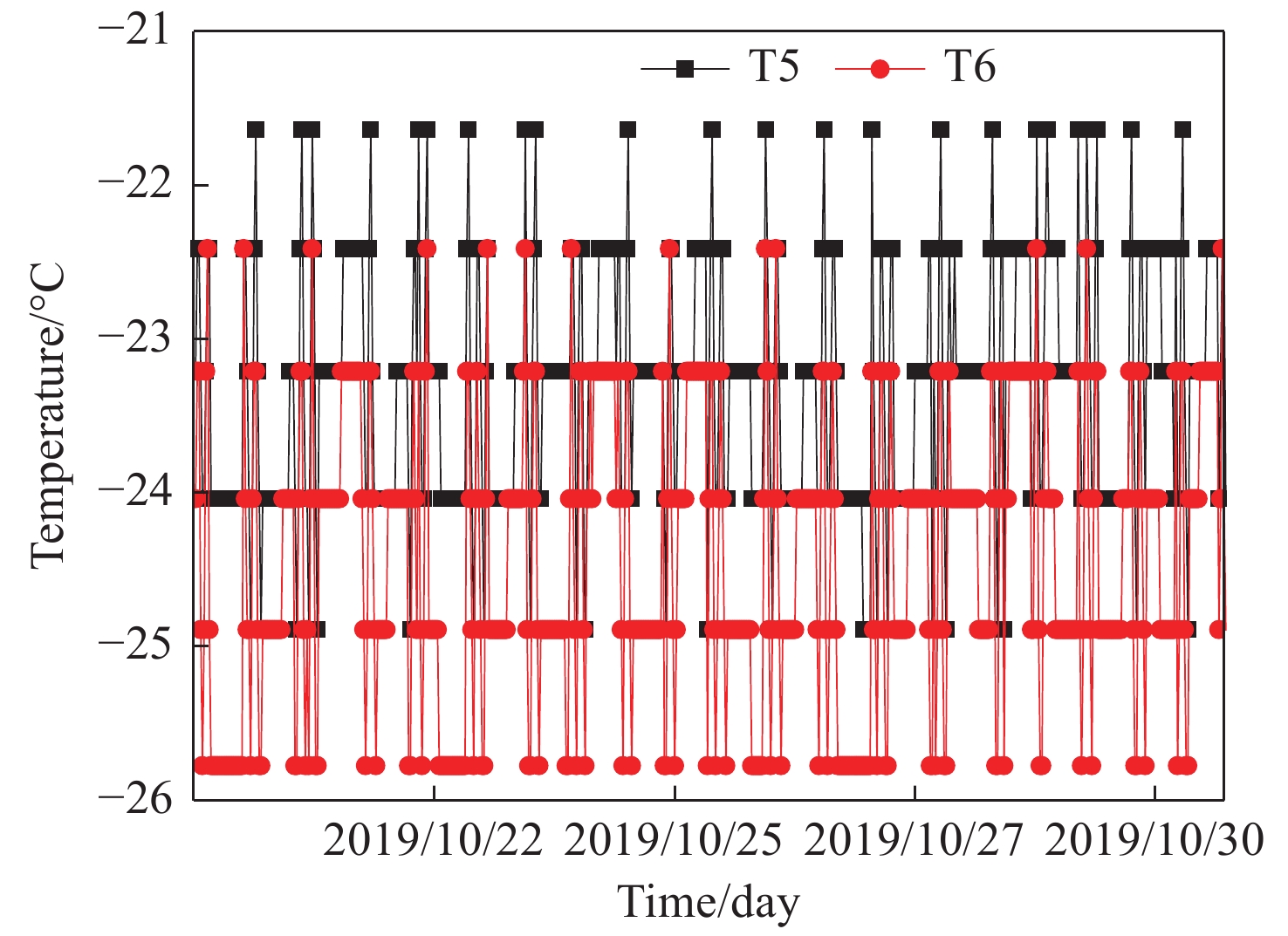
星载长波红外相机工作时需要将整个光学系统的温度降低至−20 °C以下,以减少背景红外辐射的影响。在弱导热连接结构设计的基础上,研制了Ω型柔性遮阳装置,通过直接辐冷方式实现了光学系统的低温设计;研制了鸟笼式三维导热带,实现了主镜筒的均温设计。作为国内首个在空间领域应用的低温光学系统随实践九号B星进行了在轨飞行试验,结果表明,整个光学系统温度可长期保持在−35 °C~−20 °C,主镜筒圆周温度差小于4 °C。该热控设计方法简单有效,可以为类似星载红外光学系统的热设计提供参考。





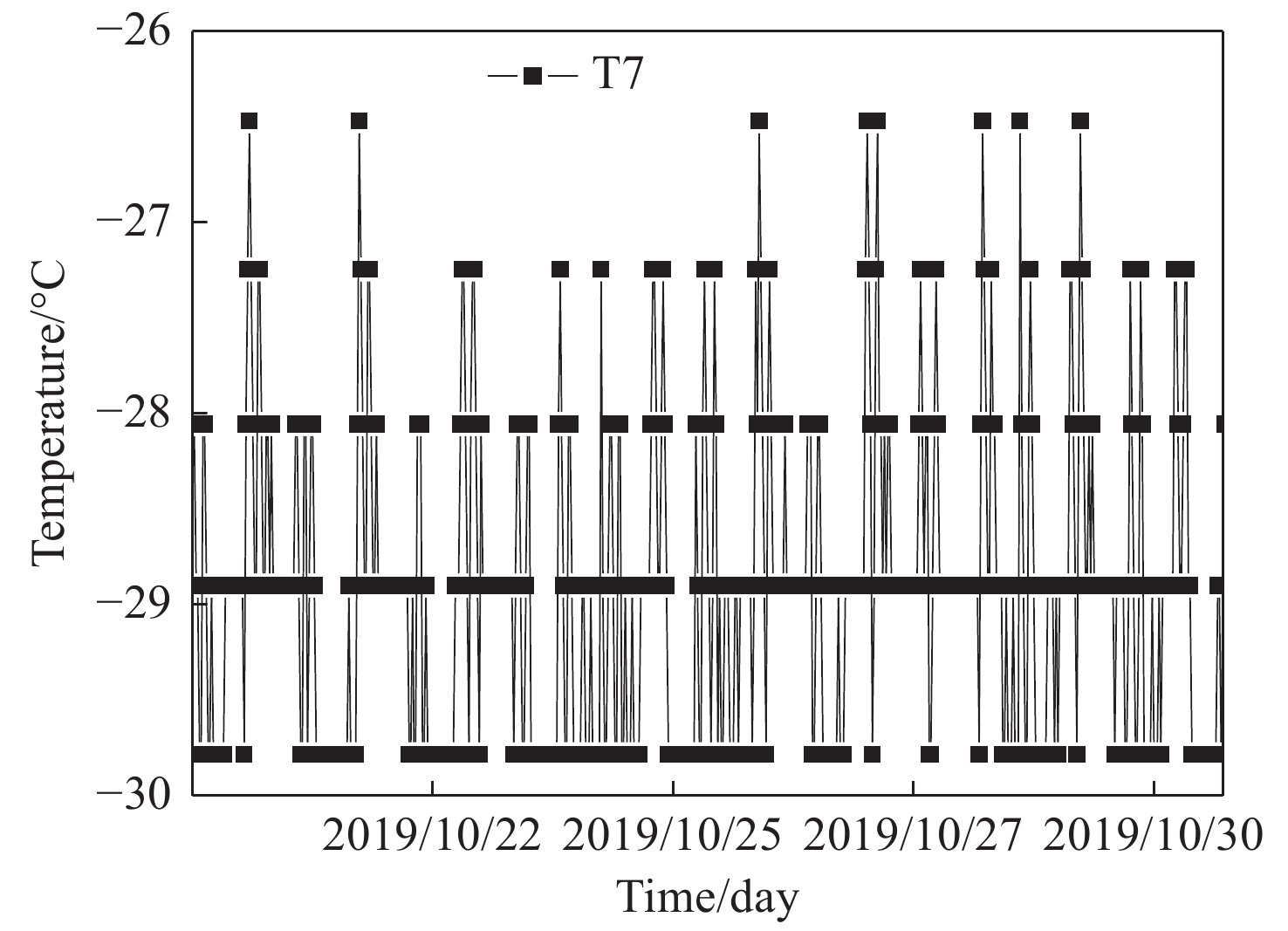
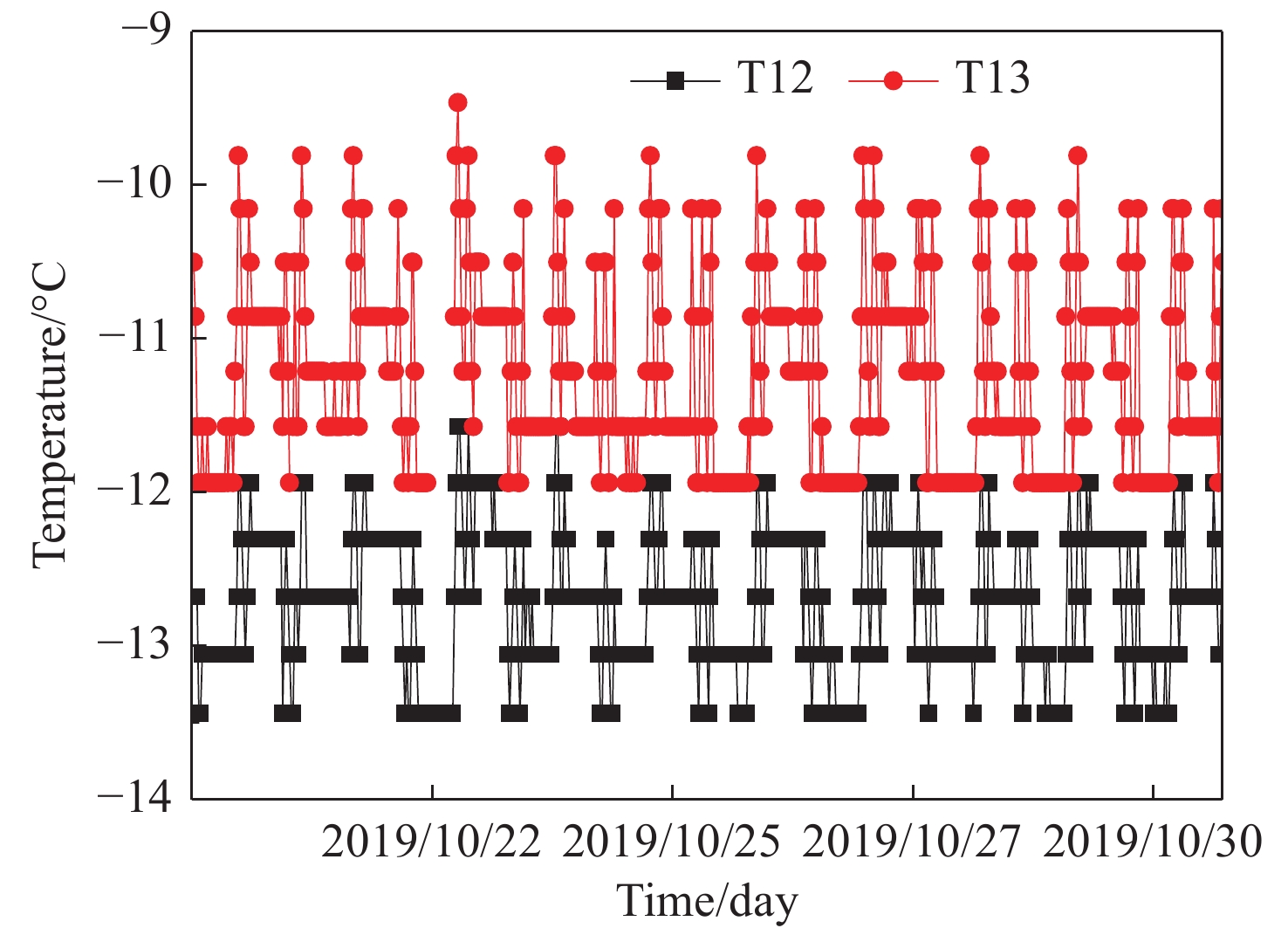
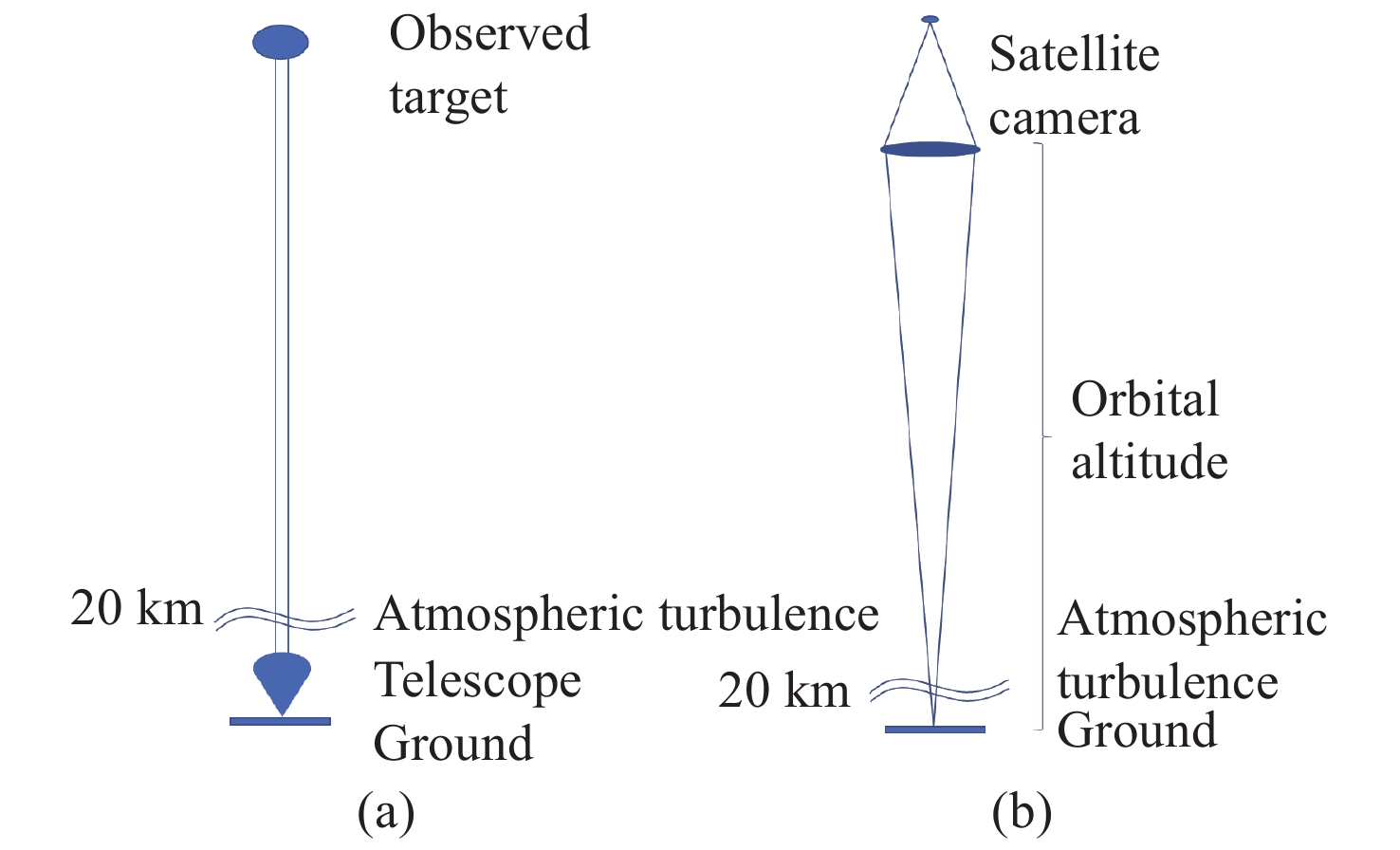
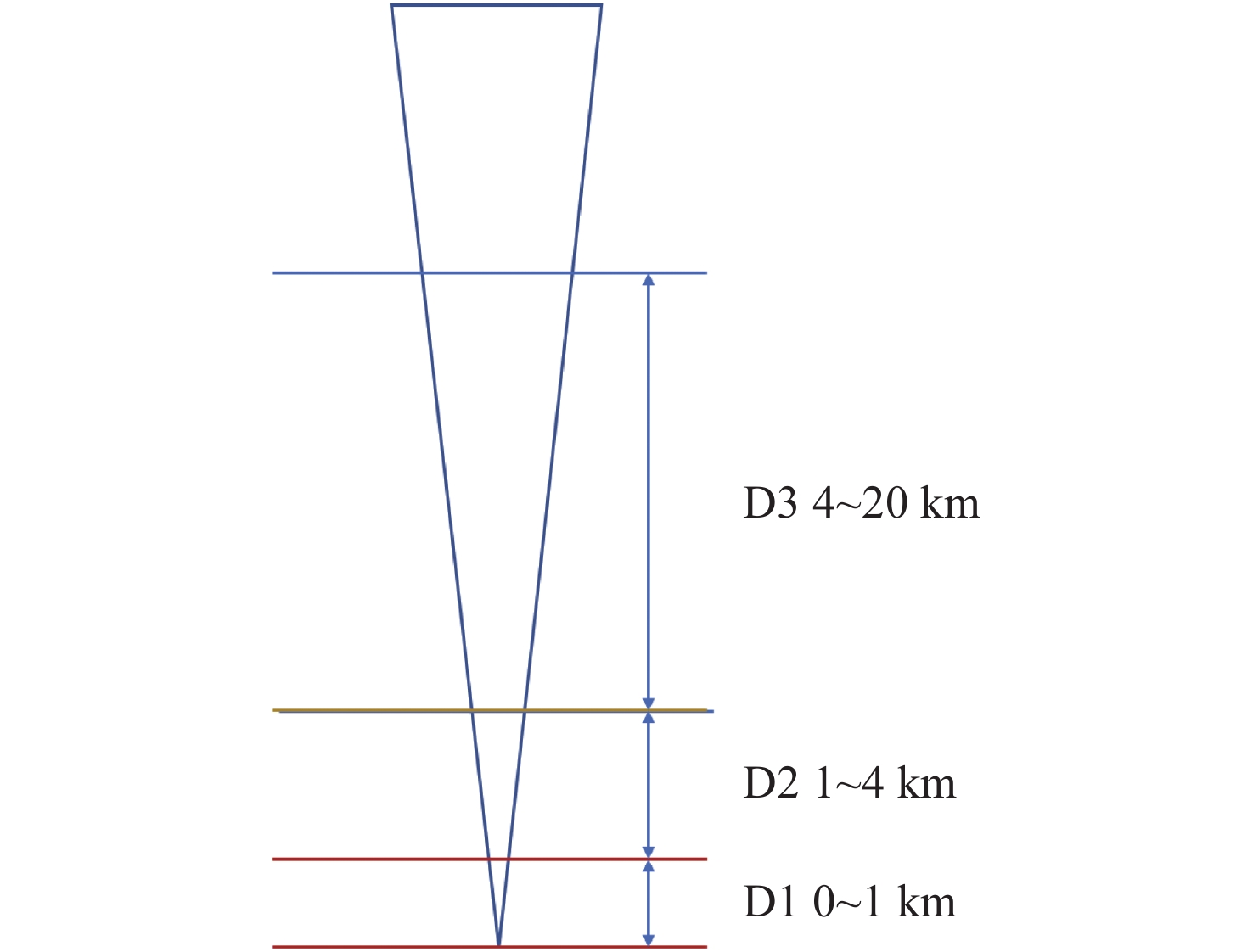
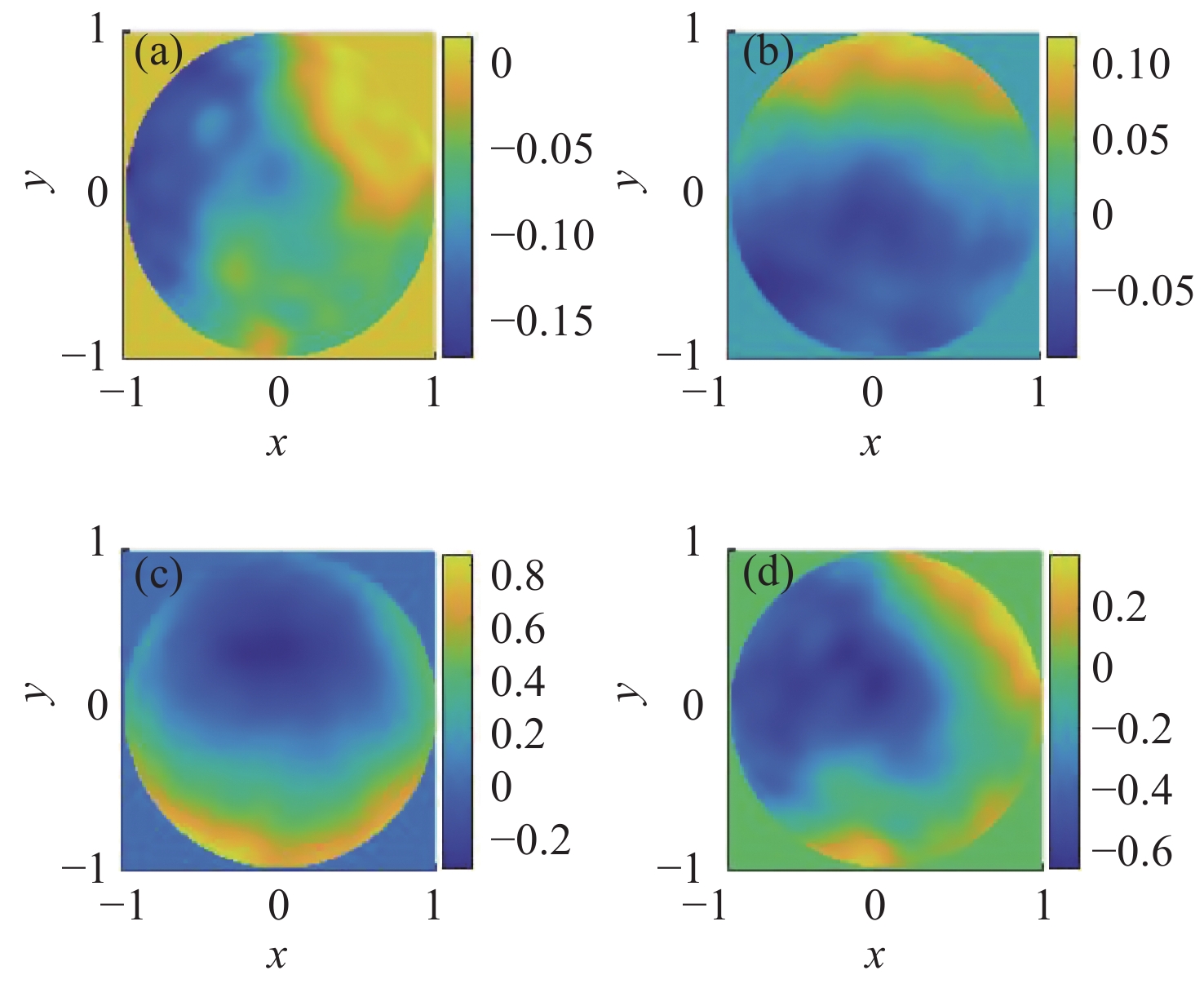
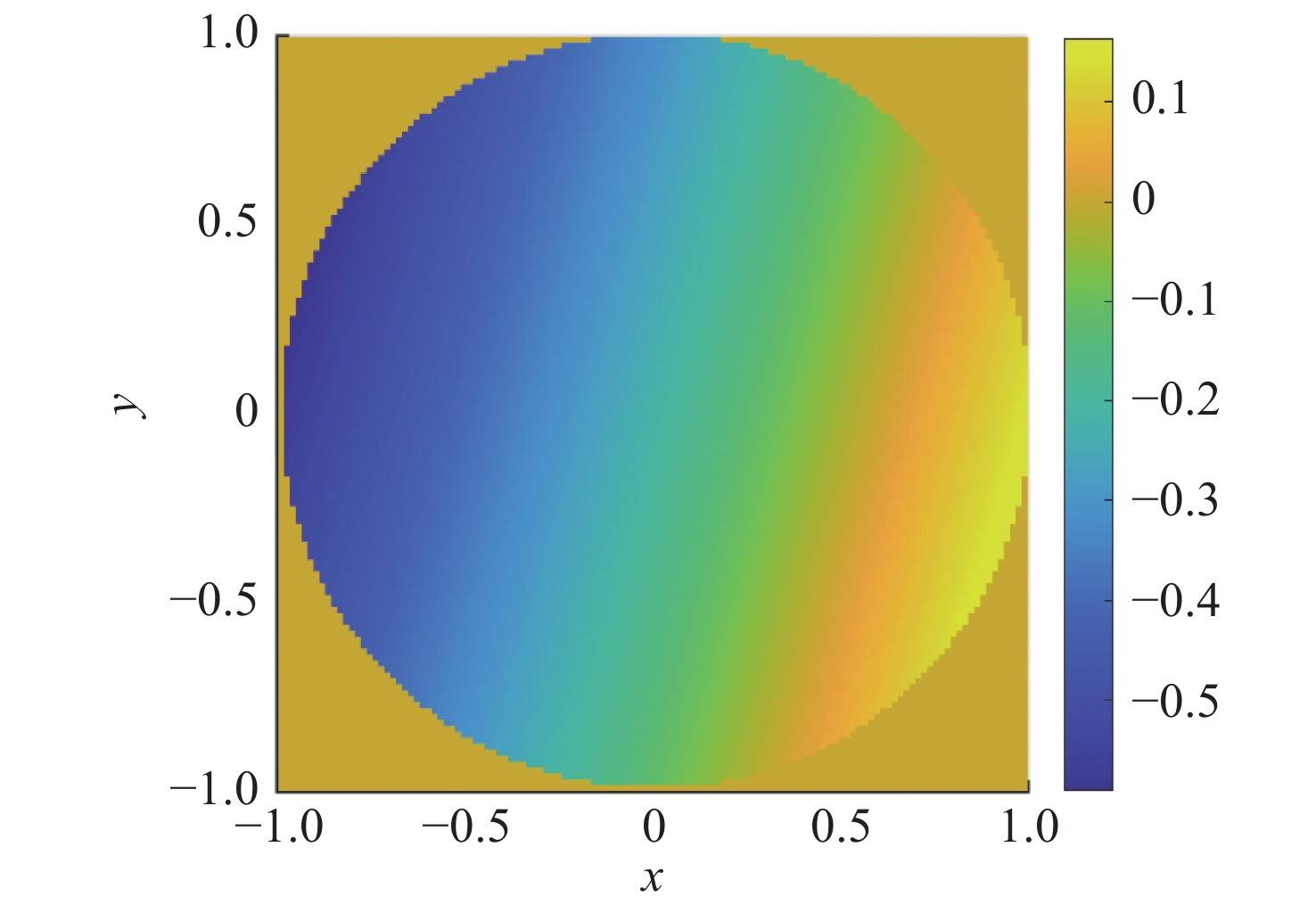
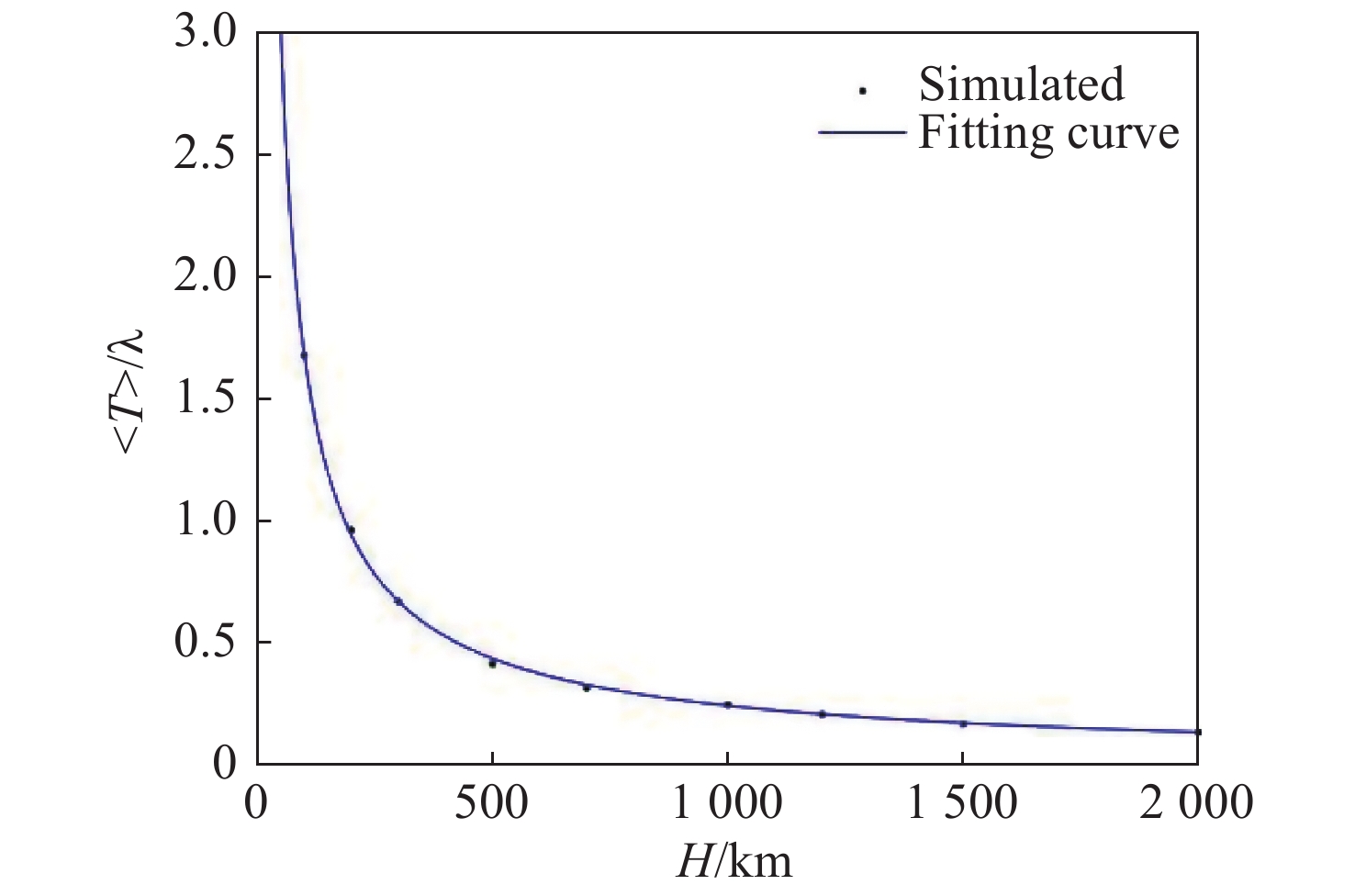
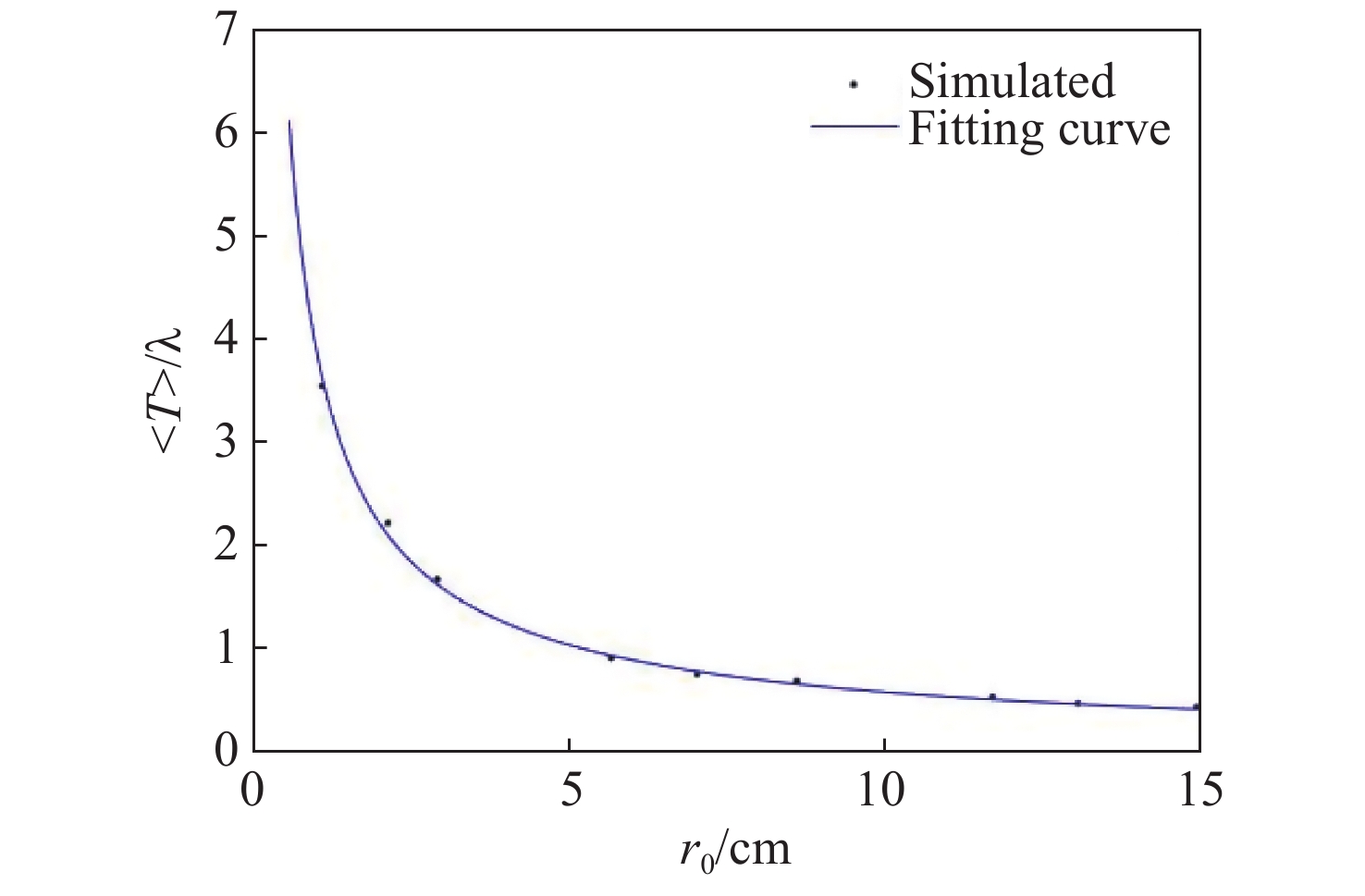
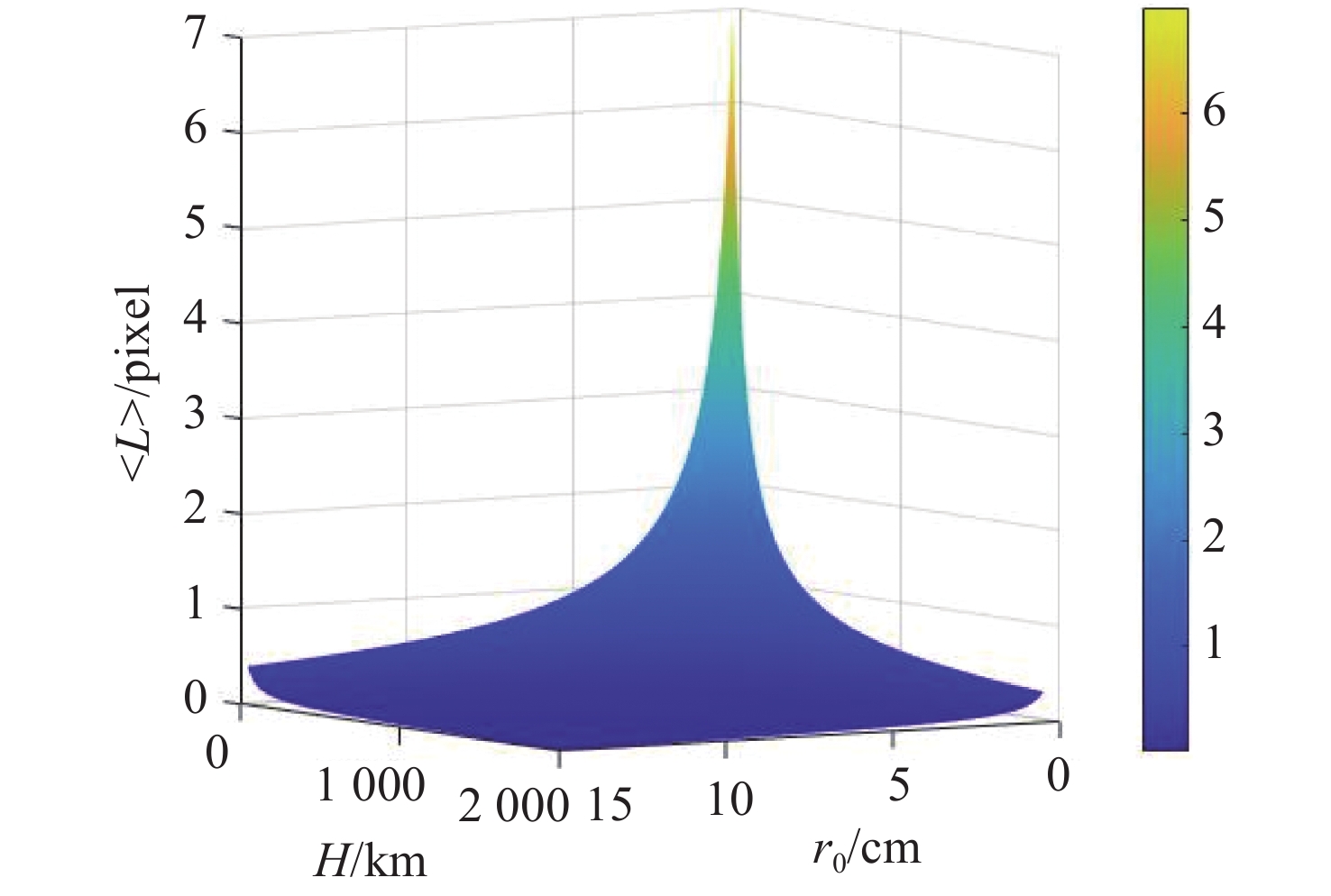
本文重点研究相机口径、大气湍流强度和卫星轨高对高分辨率遥感卫星定位精度的影响。首先,基于Kolmogorov湍流理论建立对地观测大气湍流模型和湍流模拟方法;然后,仿真分析了相机口径、卫星轨道高度和大气相干长度对卫星定位精度的影响规律,推导出湍流波前倾斜与相机口径、卫星轨道高度和大气相干长度的普适公式;最后,基于该普适公式,得出卫星对地观测时抖动量的理论计算公式。本论文的研究可为后续高分辨率遥感卫星的设计、分析和评估提供大气湍流影响的理论依据。






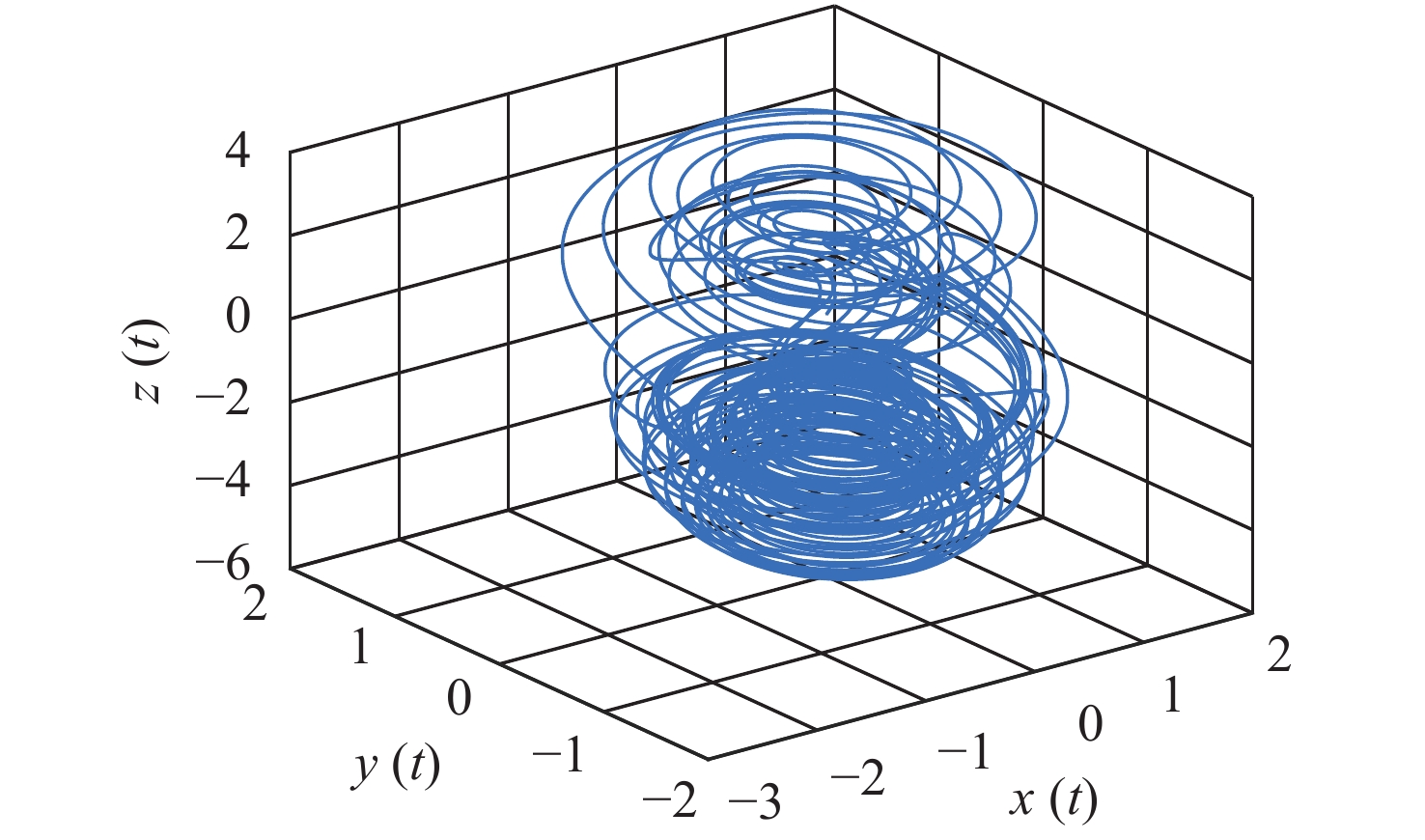
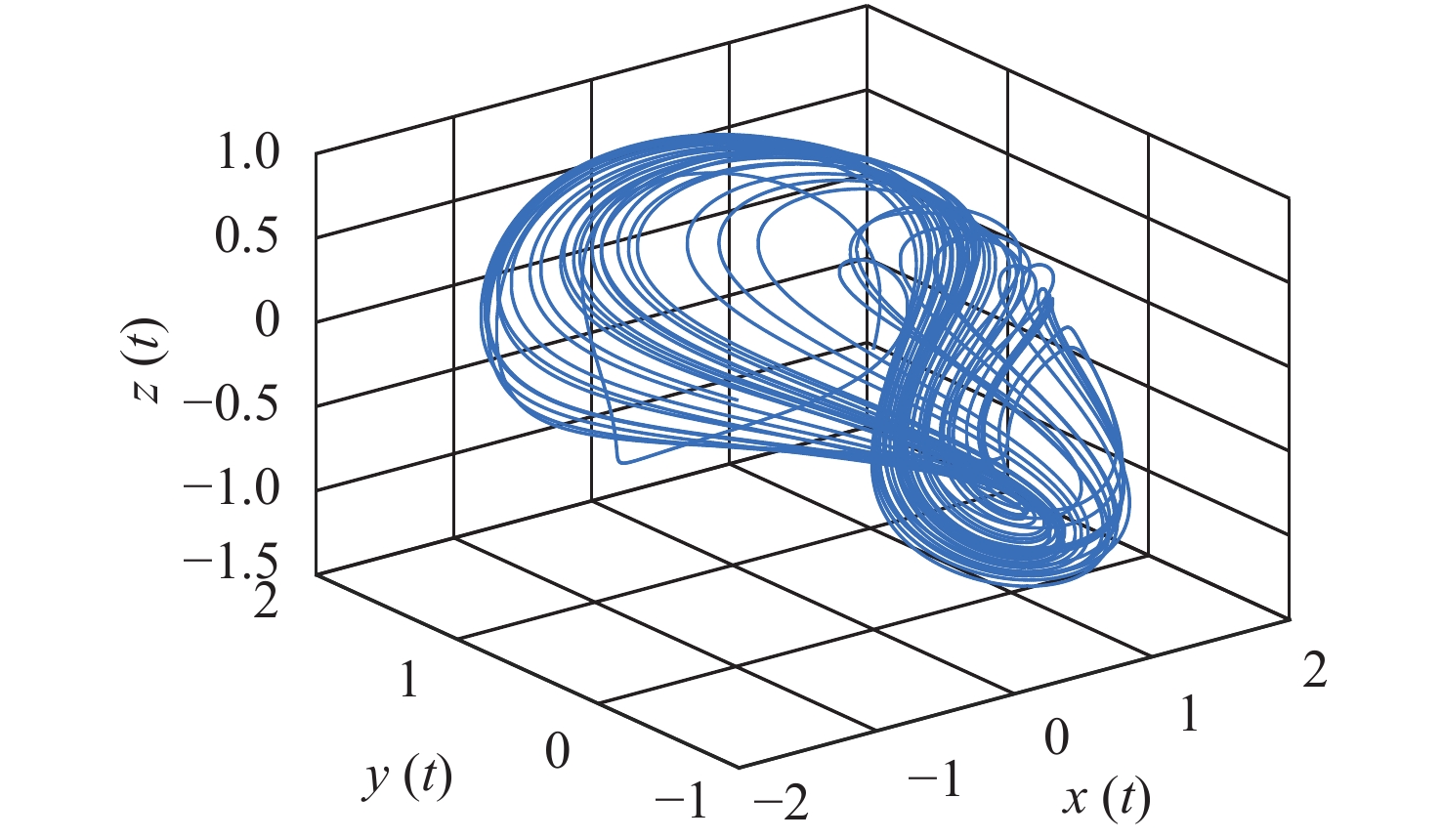
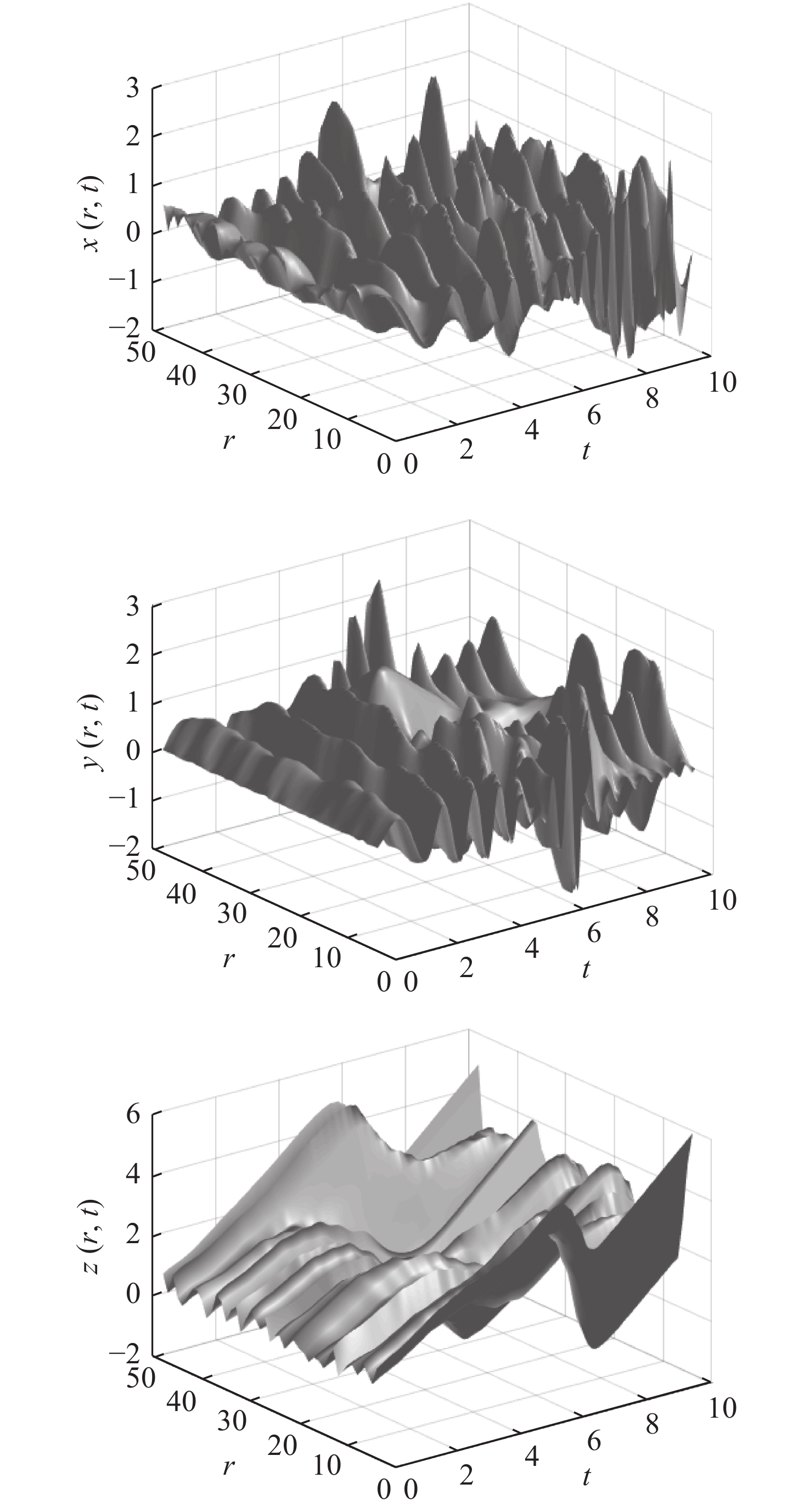
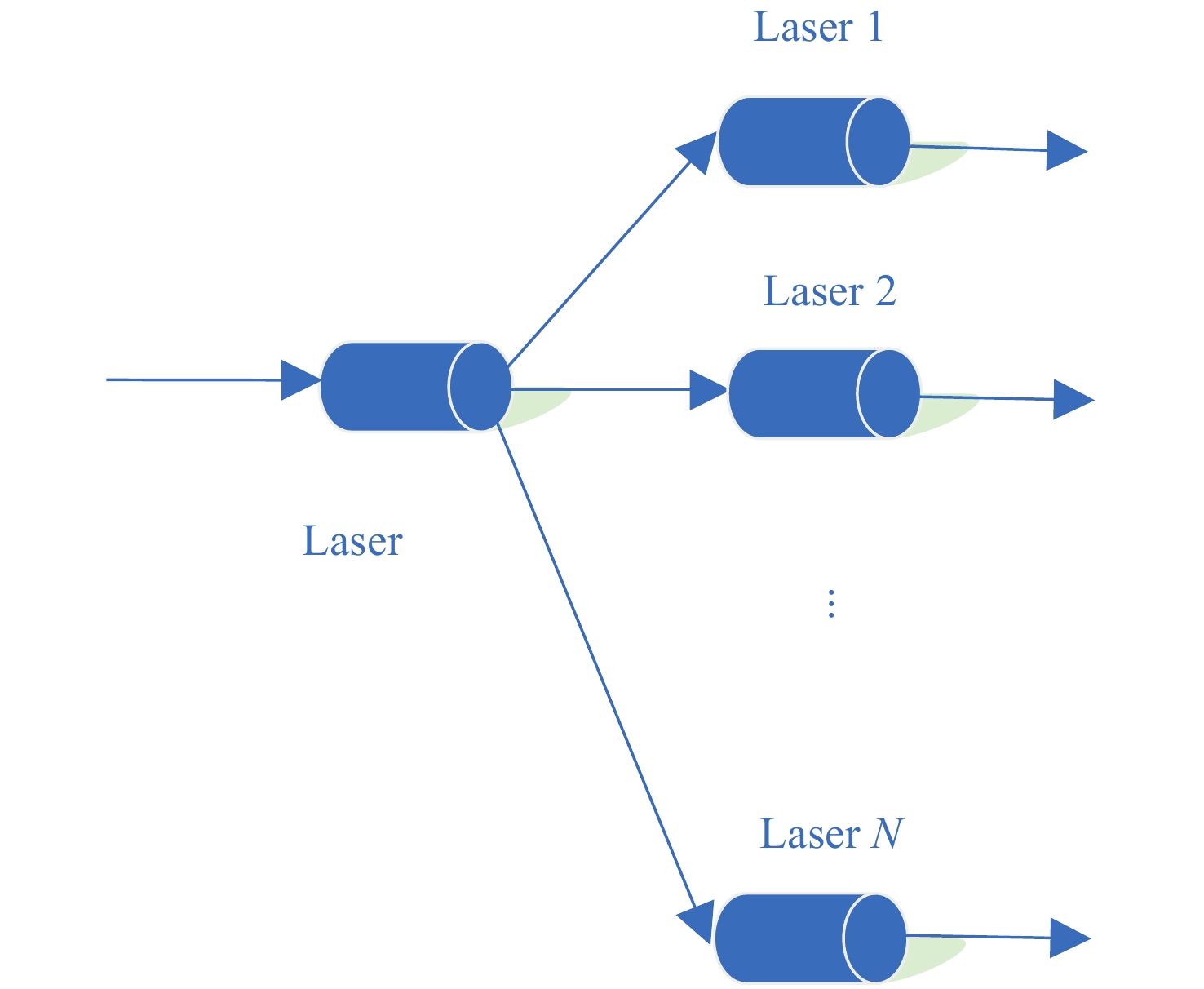
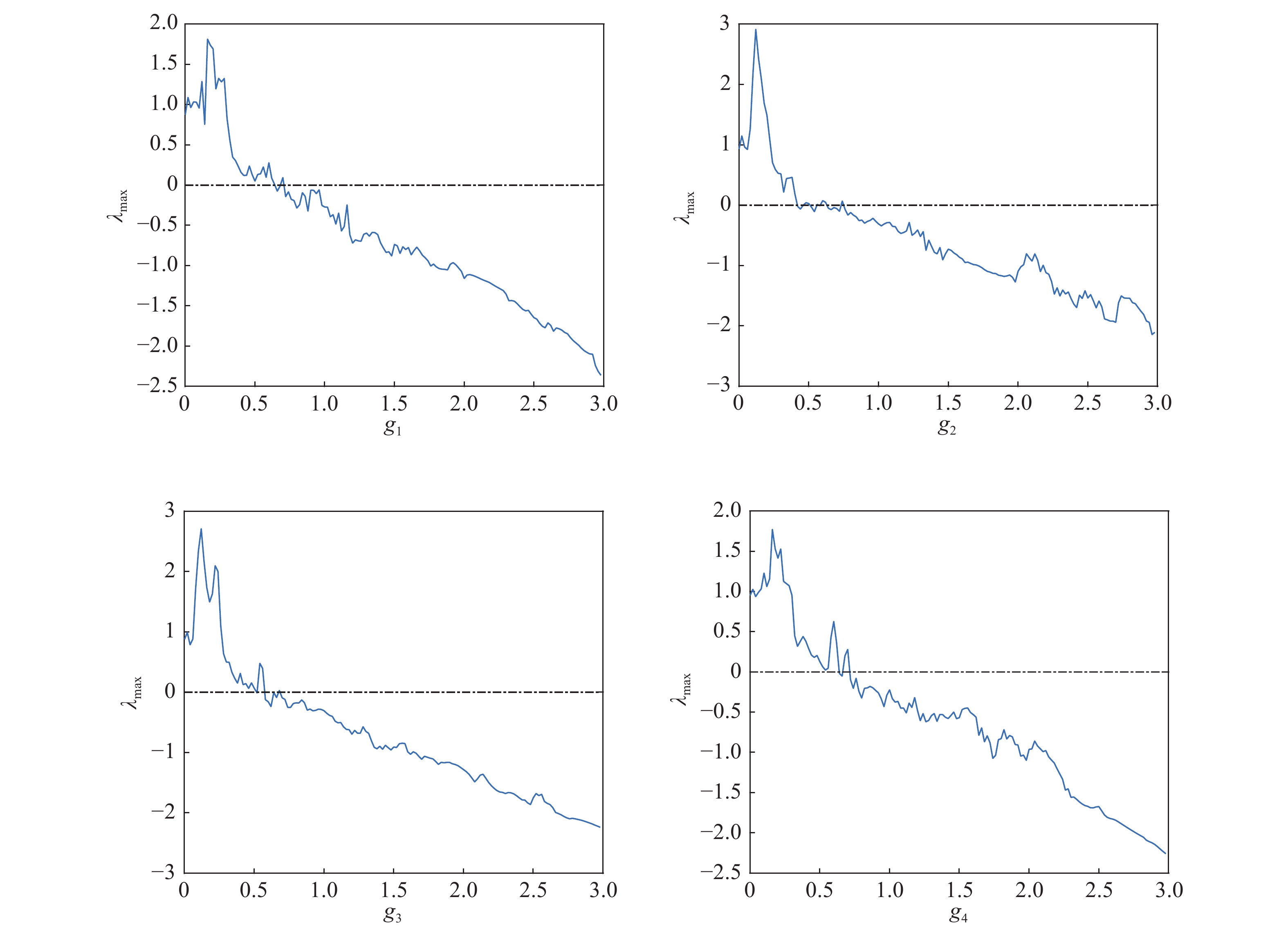
通过修正描述半导体激光器的动力学模型,给出了具有横向效应的半导体激光器的动力学方程,并分析了横向效应对半导体激光器输出特性的影响。在此基础上,进一步研究了具有横向效应的半导体激光器输出信号的同步传输技术。结果表明,考虑横向效应后,半导体激光器的输出呈现新的时空混沌态,且对初始值非常敏感。同时,无论是利用半导体激光器进行单通道信号的同步传输还是多通道信号的同步传输,其传输性能均十分稳定。该项同步技术十分简单,非常易于实际应用。








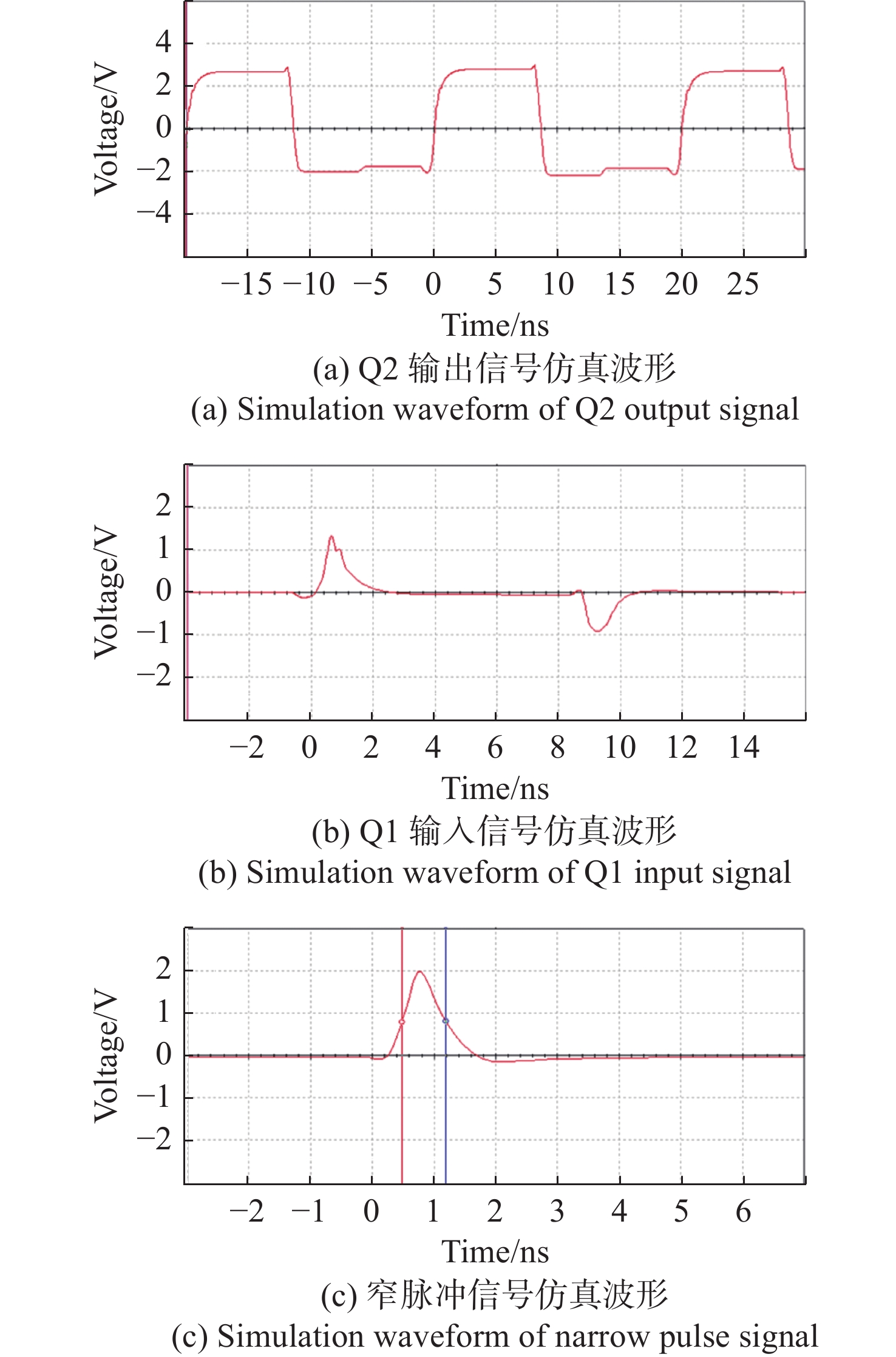
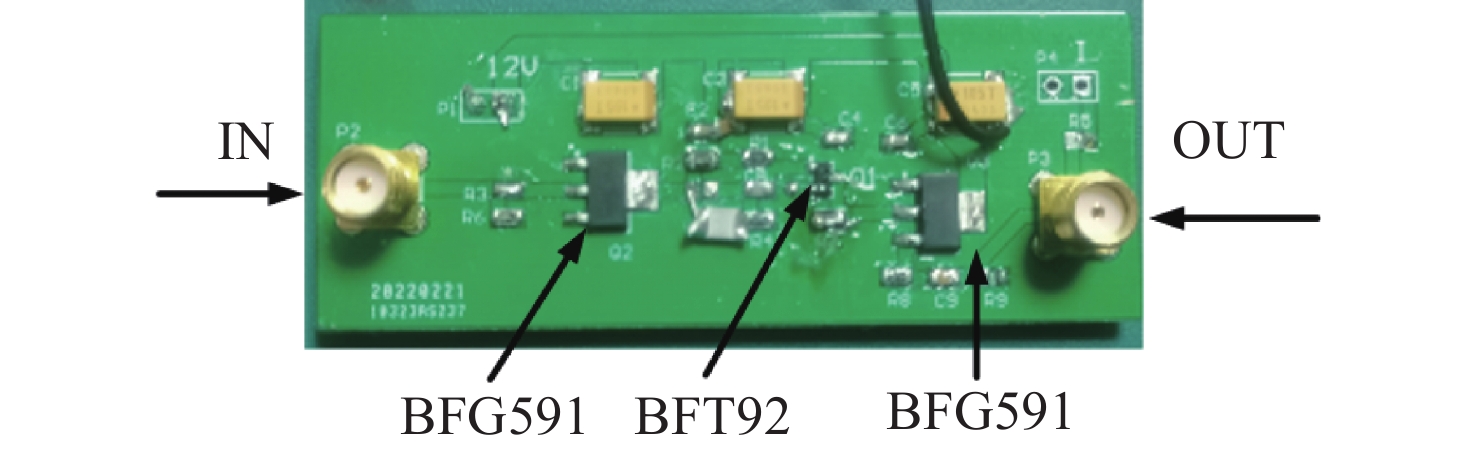
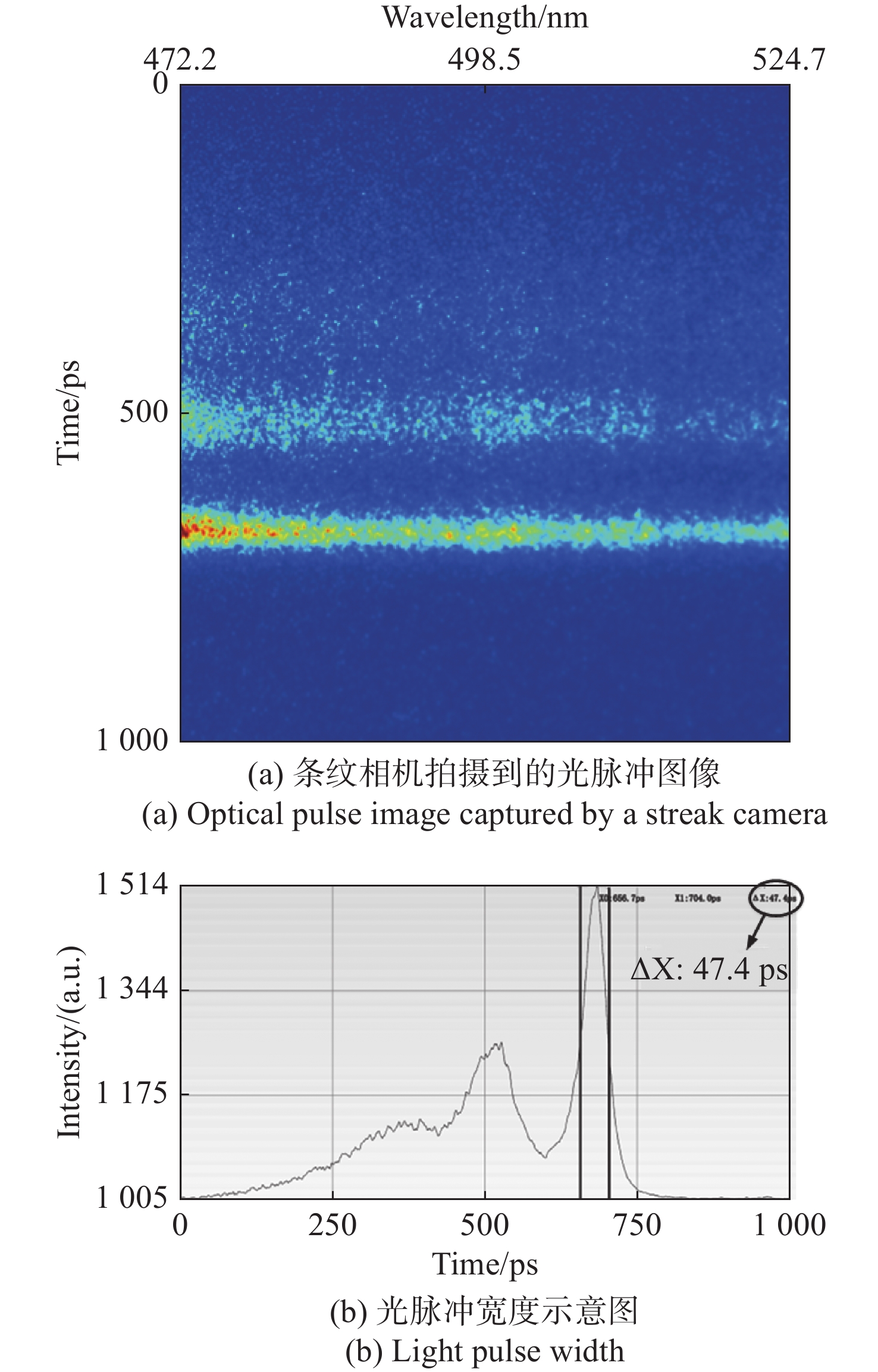
基于单光子探测的距离选通成像系统中,需发射短脉冲激光并进行发射器和接收器之间的同步控制,使探测器工作在光子计数模式并在时间上进行积分,以完成成像操作。为了获得满足系统要求的短脉冲激光,同时减小系统体积、降低系统成本,本文提出将基于射频双极晶体管和基于阶跃恢复二极管SRD(结合短路传输线)两种产生窄脉冲电路应用于单光子距离选通成像系统。介绍了二者的原理与设计方法,进行了仿真验证、实物制作及测试,对脉冲发生器的特点、影响脉宽幅值的因素进行了分析。实物测试结果表明,基于晶体管方式可以产生上升时间为903.5 ps、下降时间为946.1 ps、脉冲宽度为824 ps、幅度为2.46 V的窄脉冲。基于SRD方式可以产生上升时间为456.8 ps、下降时间为458.3 ps、脉冲宽度为1.5 ns、幅度为2.38 V的窄脉冲,二者重复频率皆可达到50 MHz。利用这两种设计方法的任何一种配合外部电流驱动激光二极管都能够获得性能优良的短脉冲激光输出。









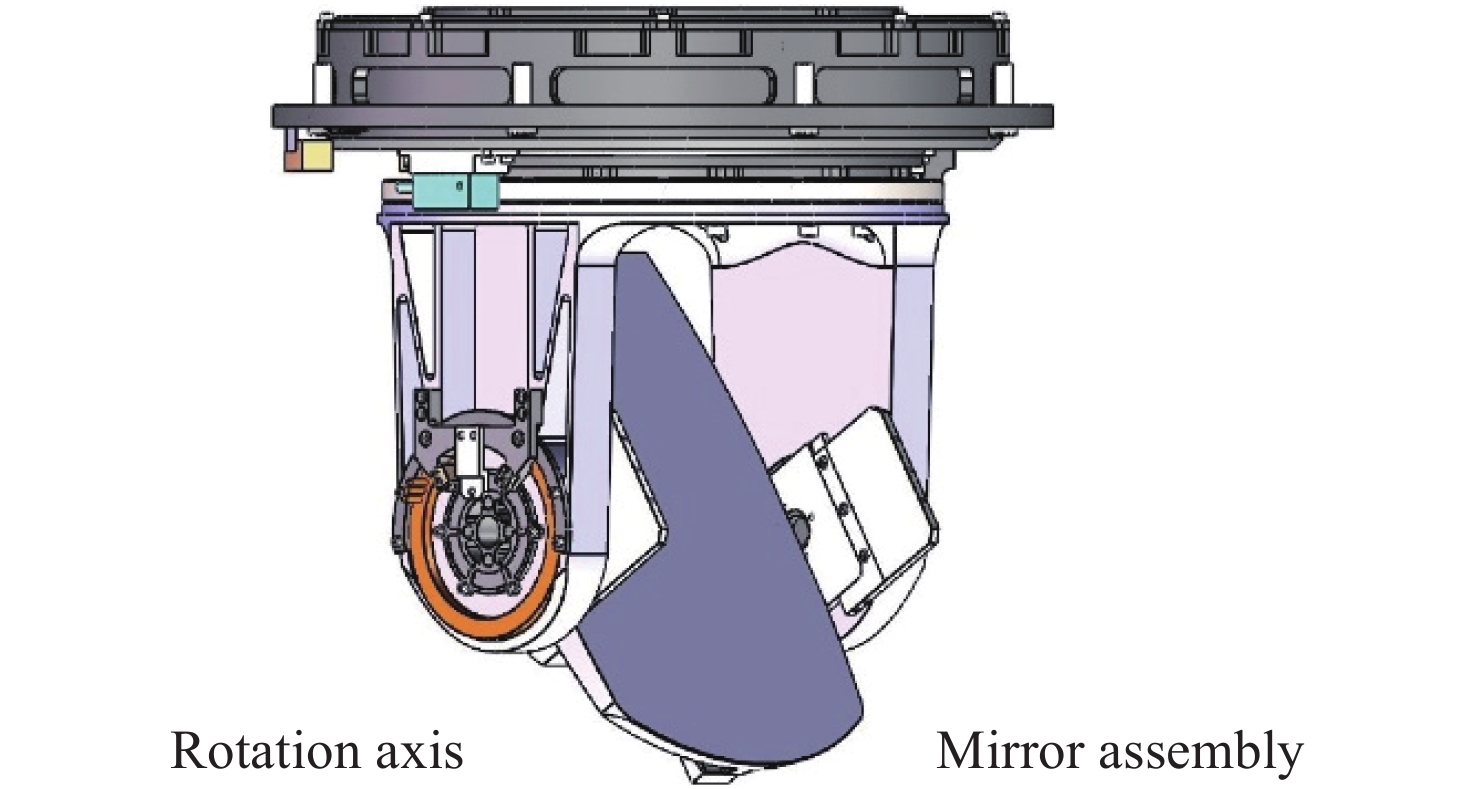
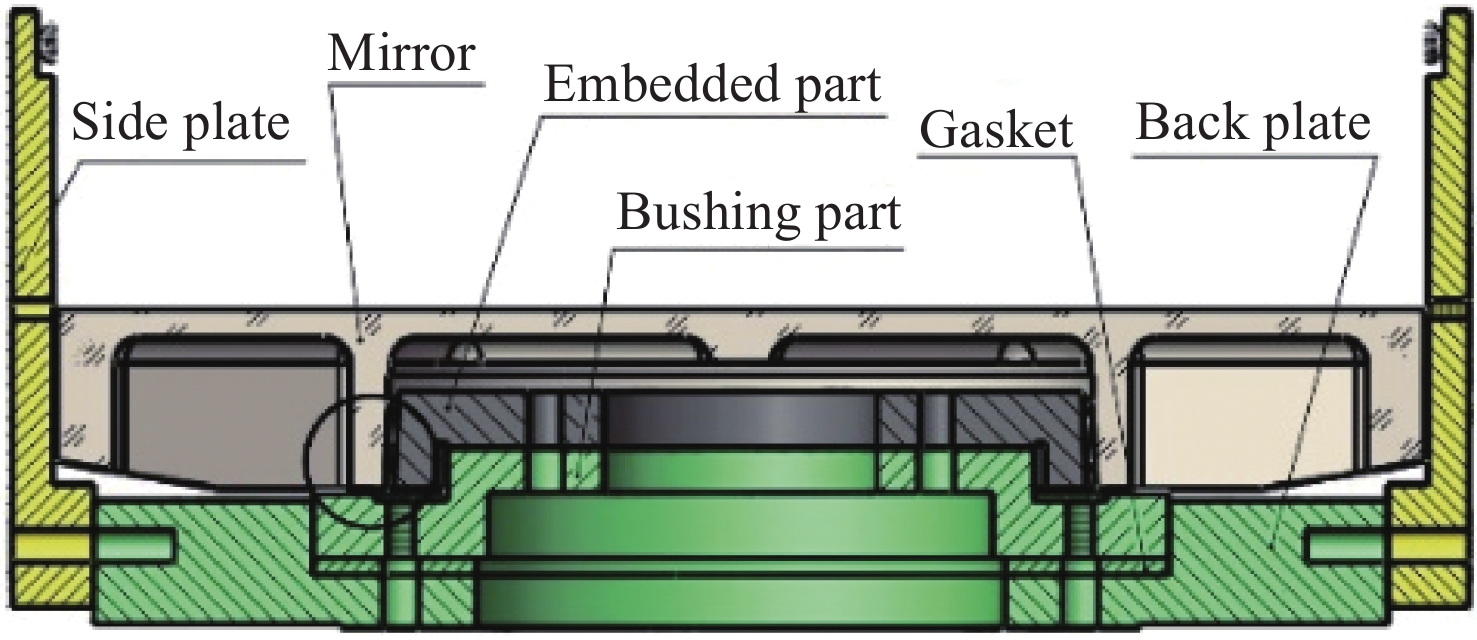
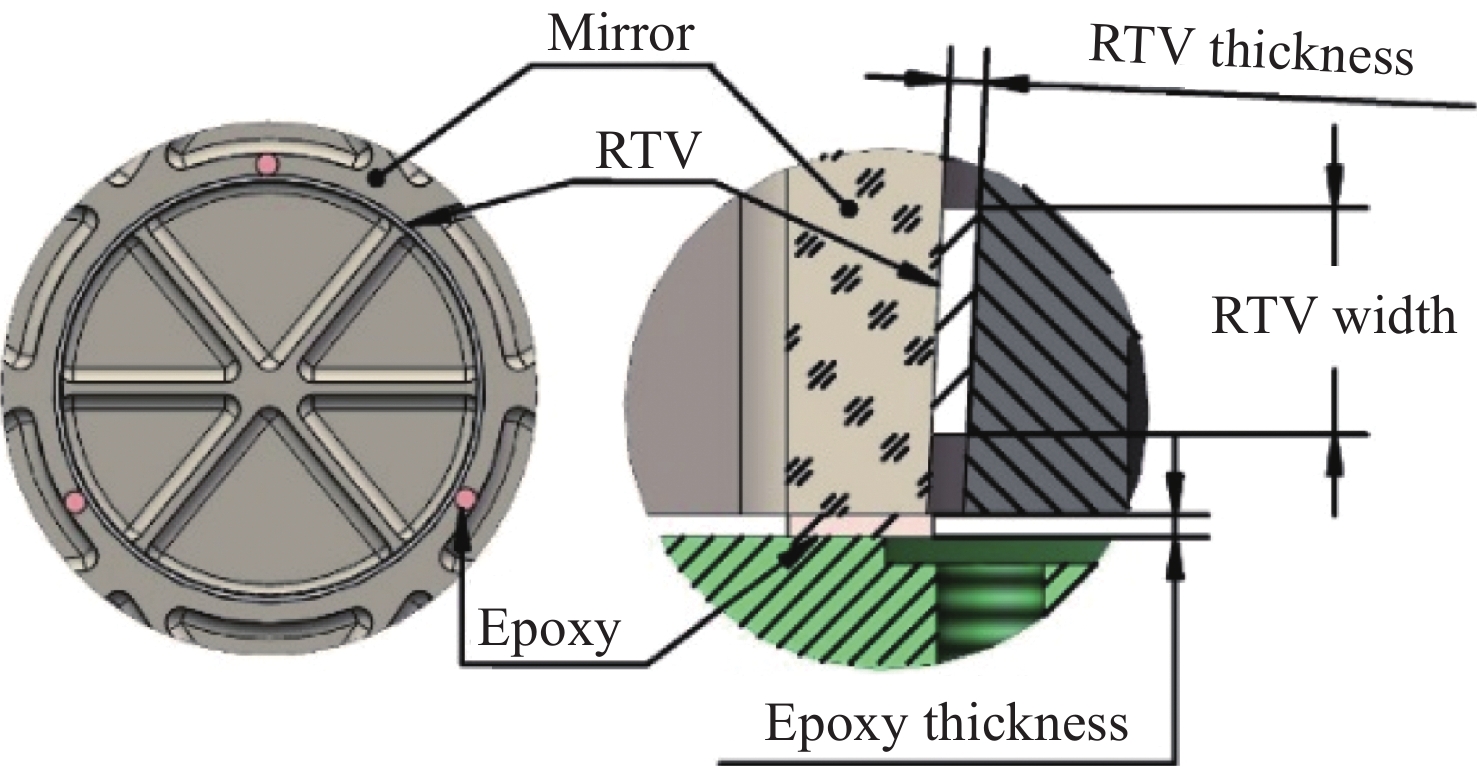
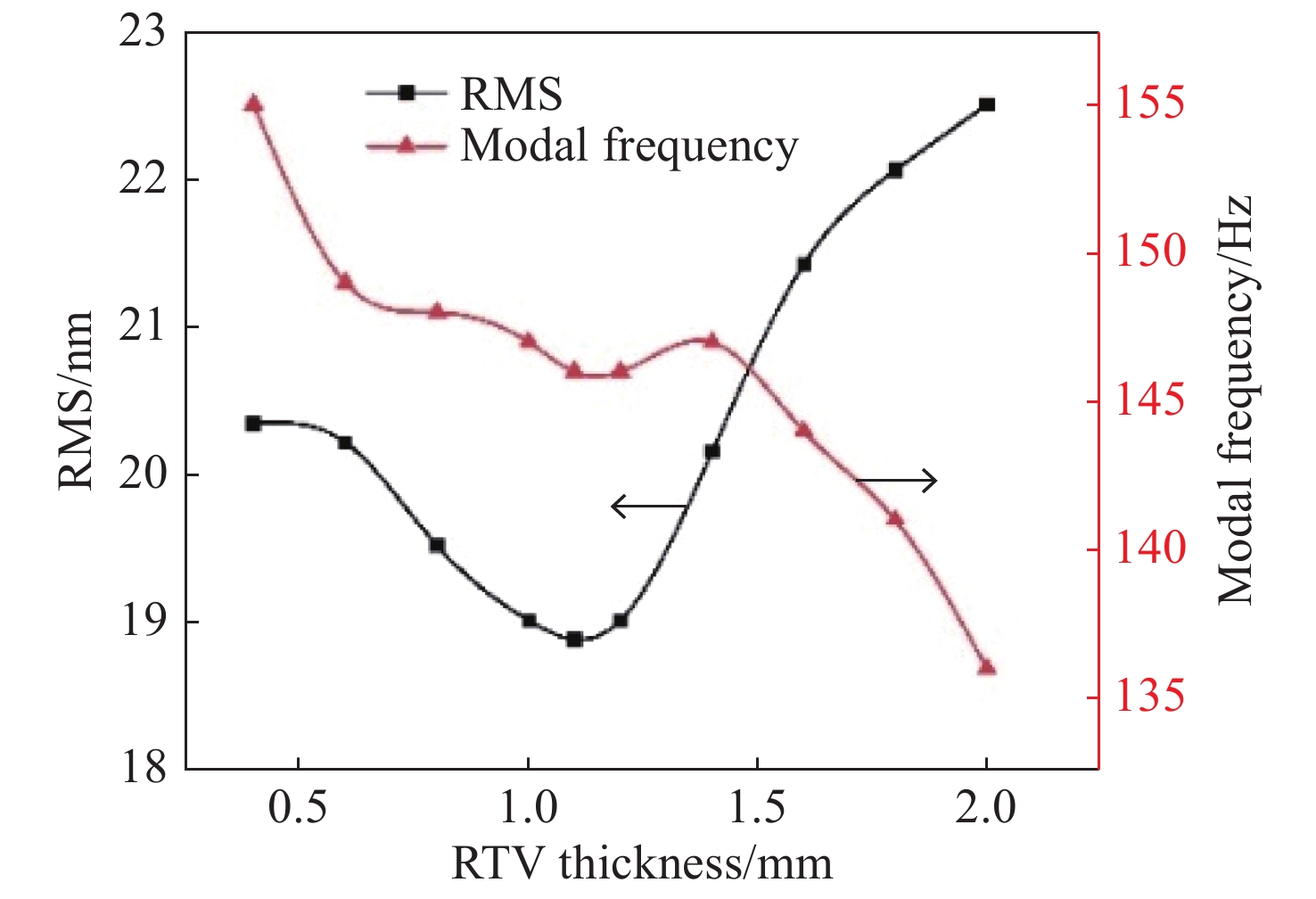
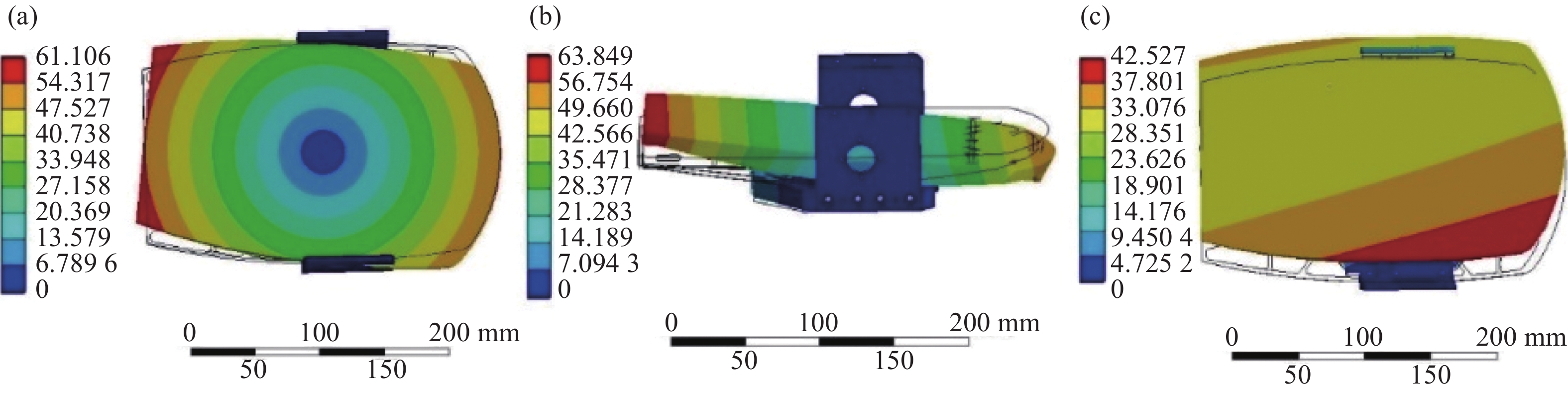
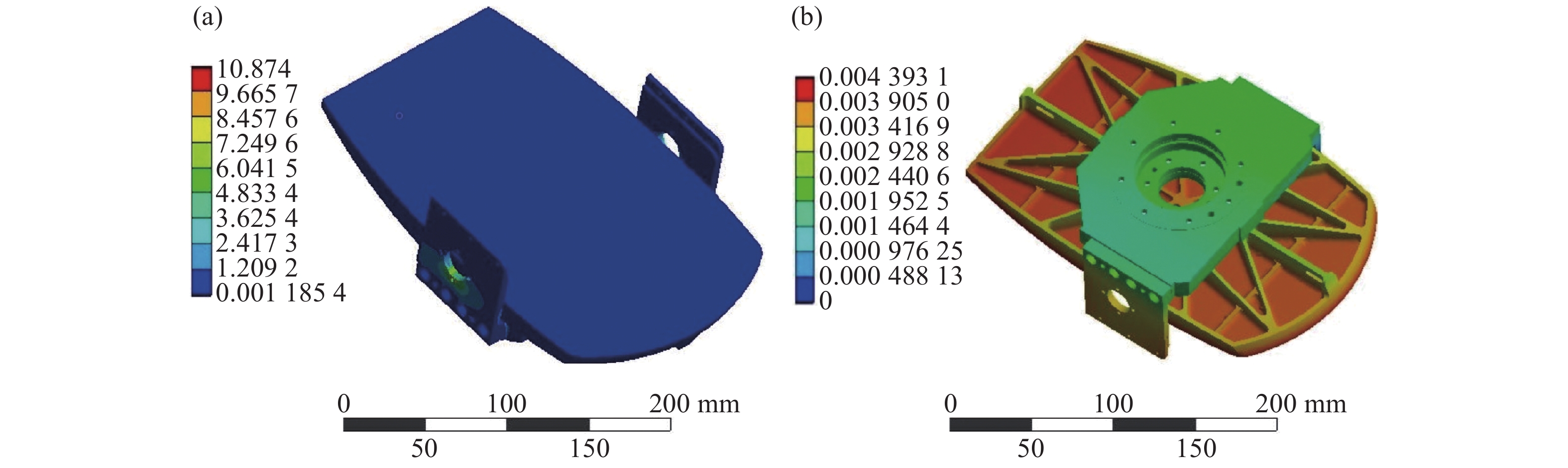
在机载宽温且反射镜镀膜温度较高的条件下,针对传统反射镜镶嵌件粘接工艺导致反射镜粘接失效、铟钢镶嵌件和反射镜线胀系数差异导致宽温下反射镜面型急剧下降的问题,提出了一种反射镜加工镀膜后再粘接镶嵌件的方法,并对其胶层参数进行研究。采用硅橡胶作为主粘接剂粘接反射镜与镶嵌件,利用硅橡胶固化后良好的弹性缓解支撑件热变形对反射镜面型的影响。通过多目标优化选取合适的硅橡胶粘接厚度1.1 mm,硅橡胶宽度7.2 mm,环氧胶厚度0.022 mm。仿真结果显示在重力及温度变化为−40 °C时(初始温度为20 °C),反射镜面型精度RMS值为25.91 nm,镜组模态一阶频率为242 Hz。最终面型检测RMS值为15.8 nm,结构谐振频率为213 Hz。试验结果显示,此方案使反射镜组件适用于大温差条件下工作,其结构和粘接层设计能够满足机载宽温和振动条件下的使用要求。









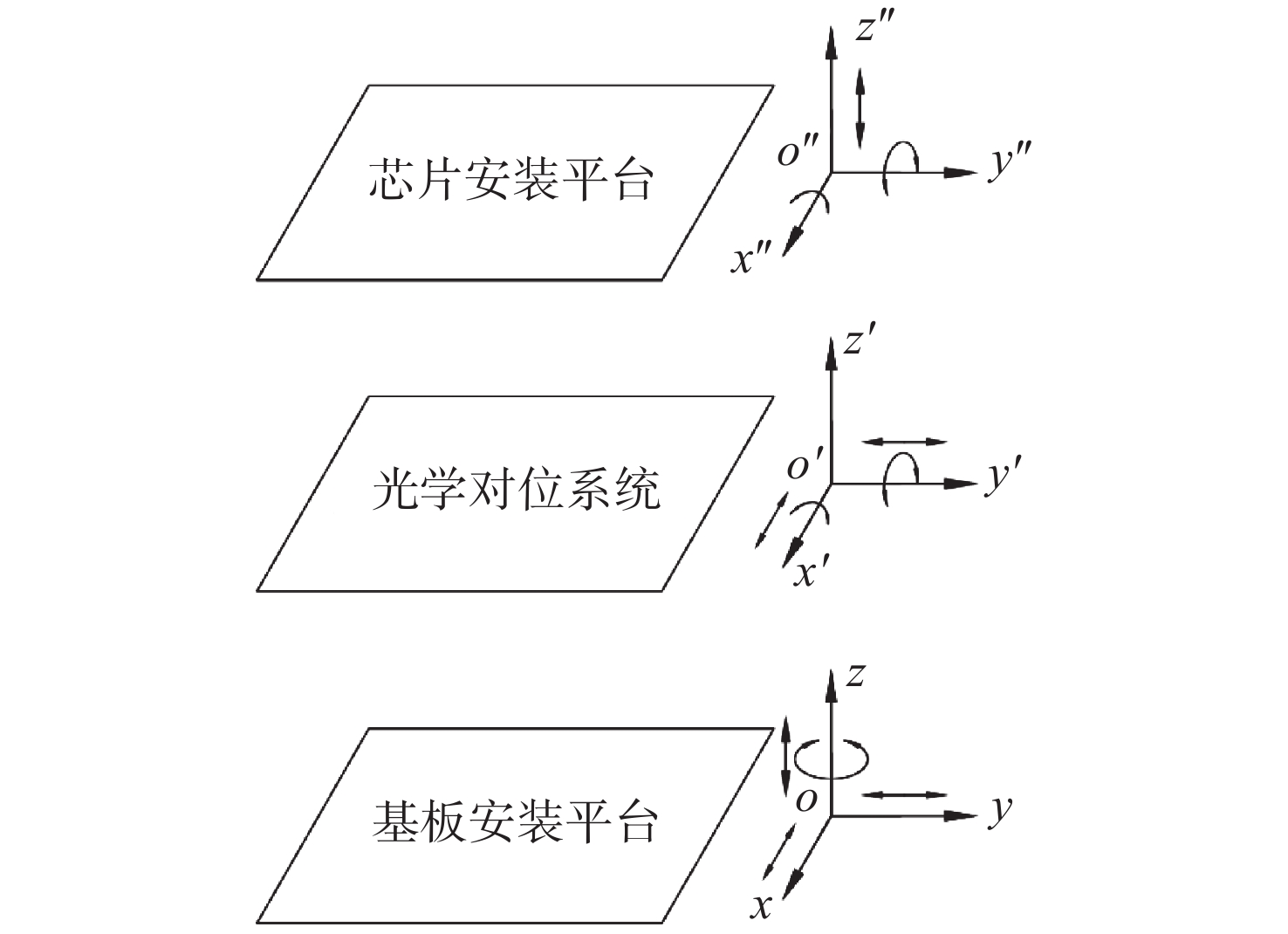
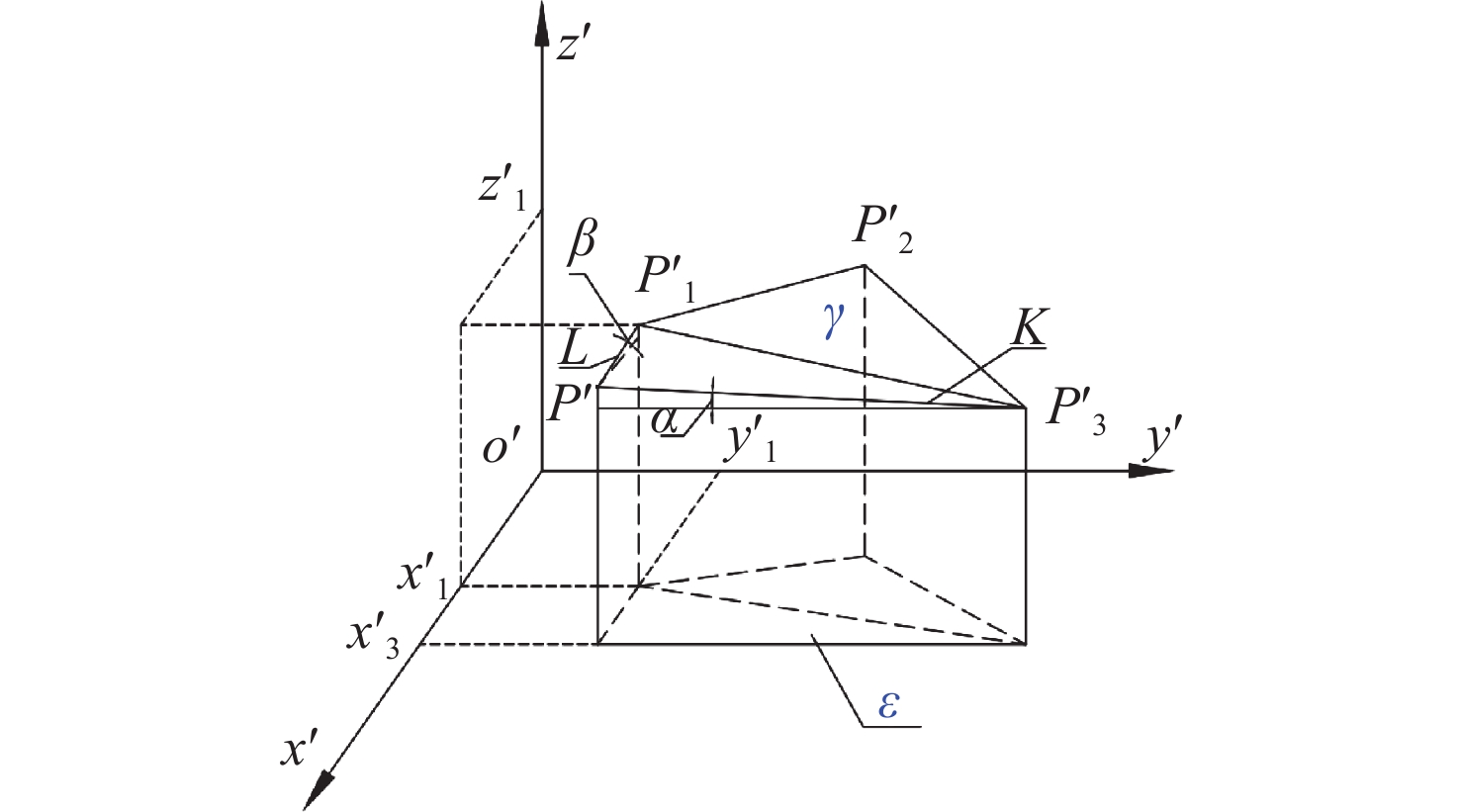
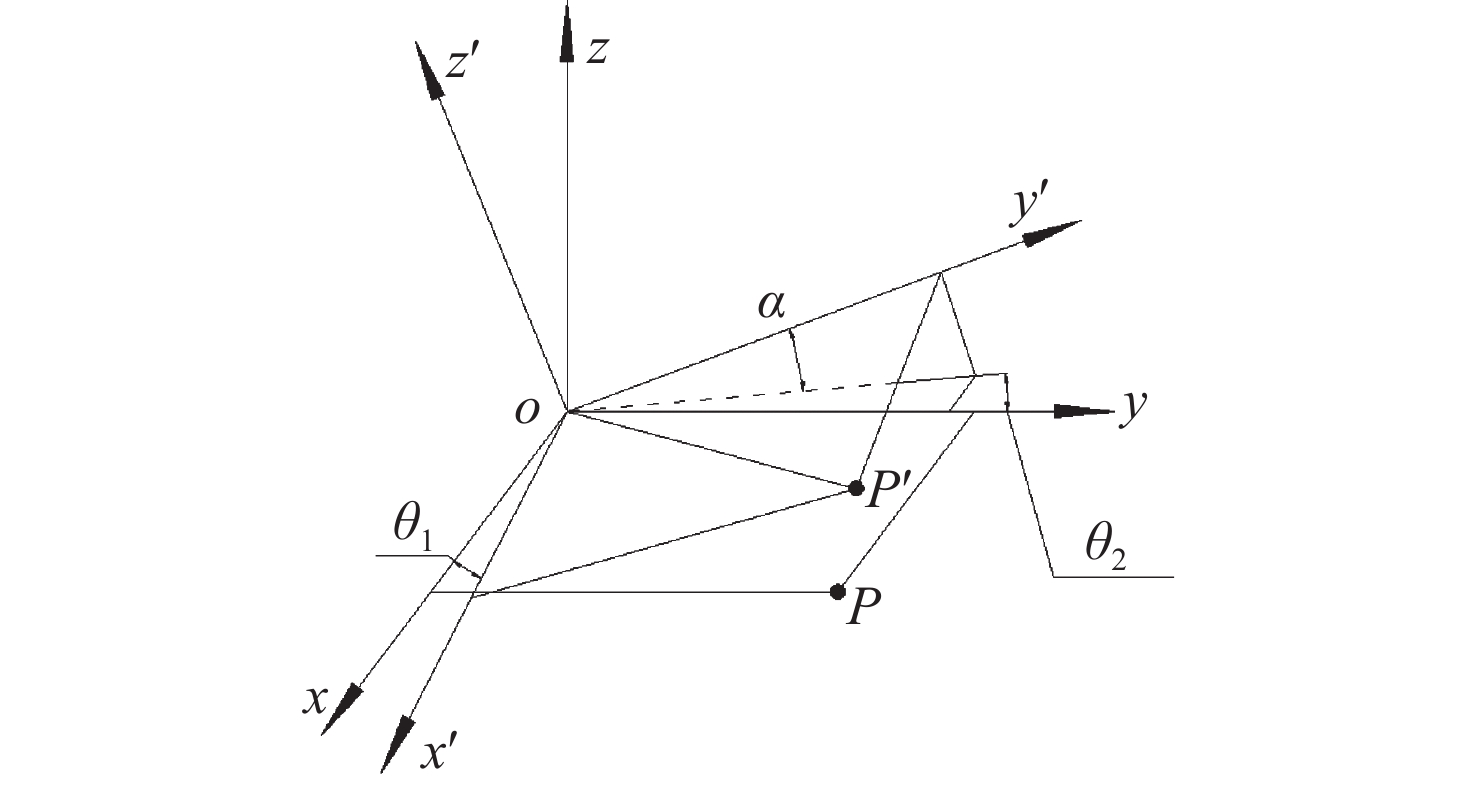
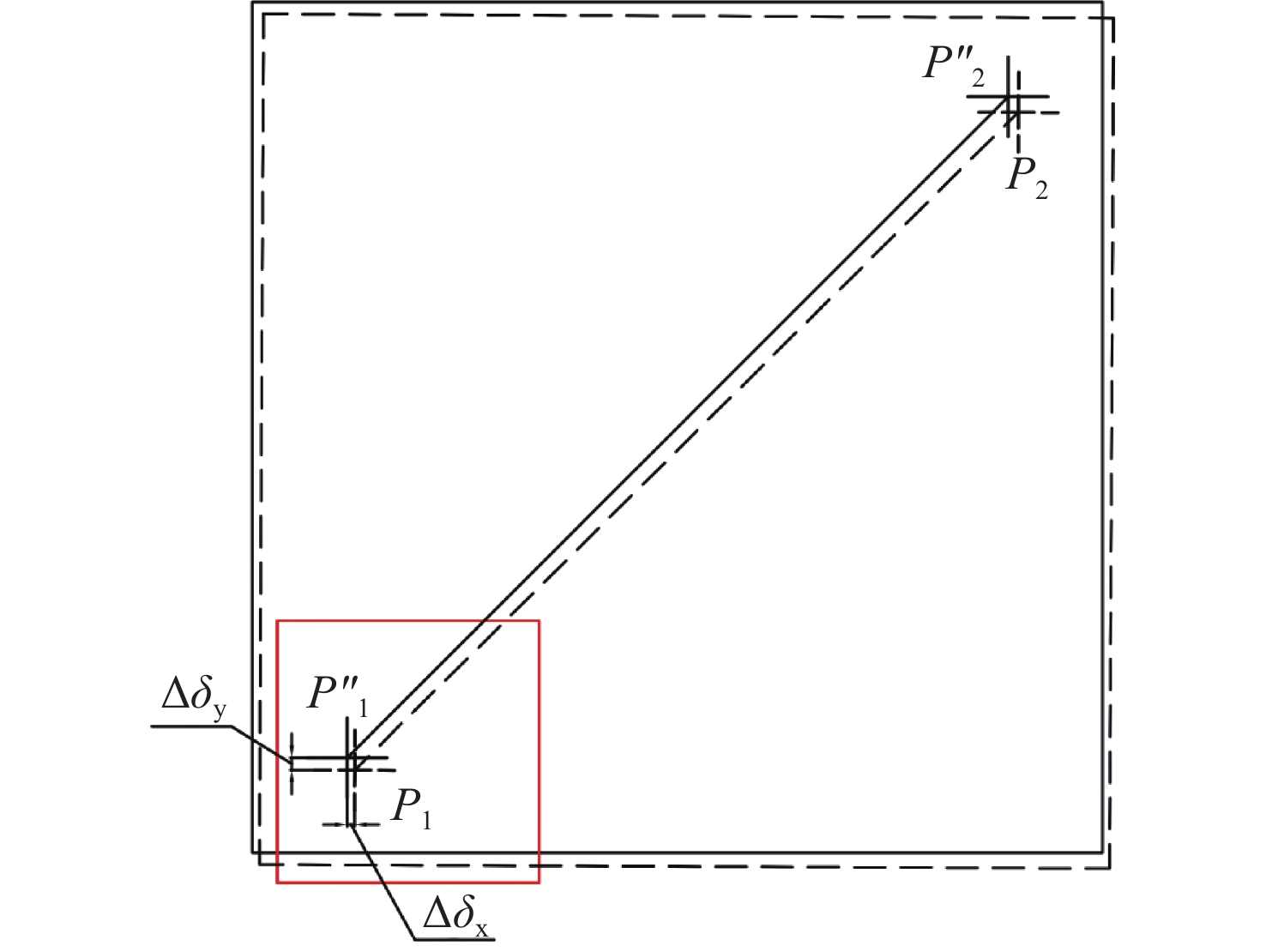
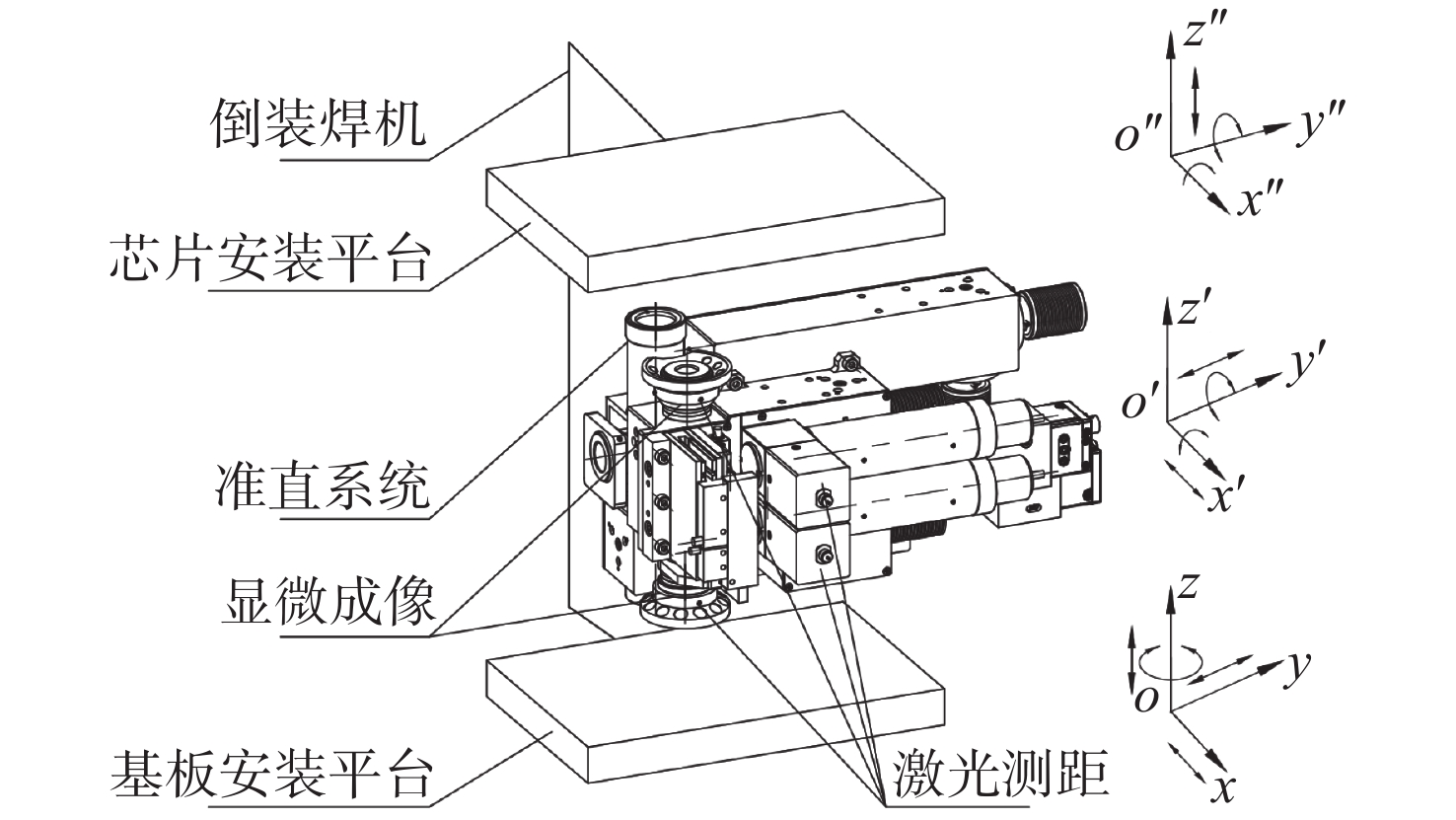
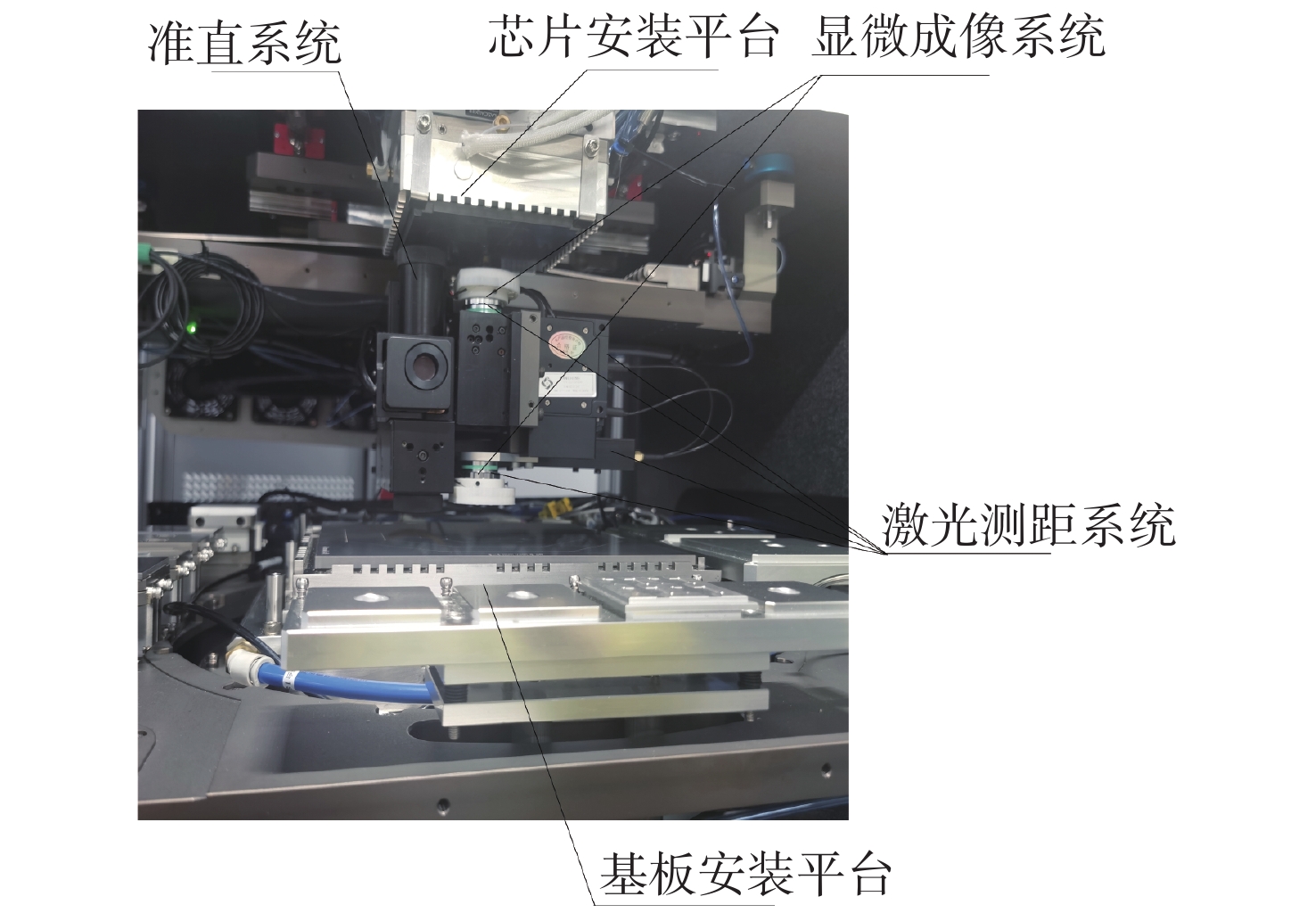
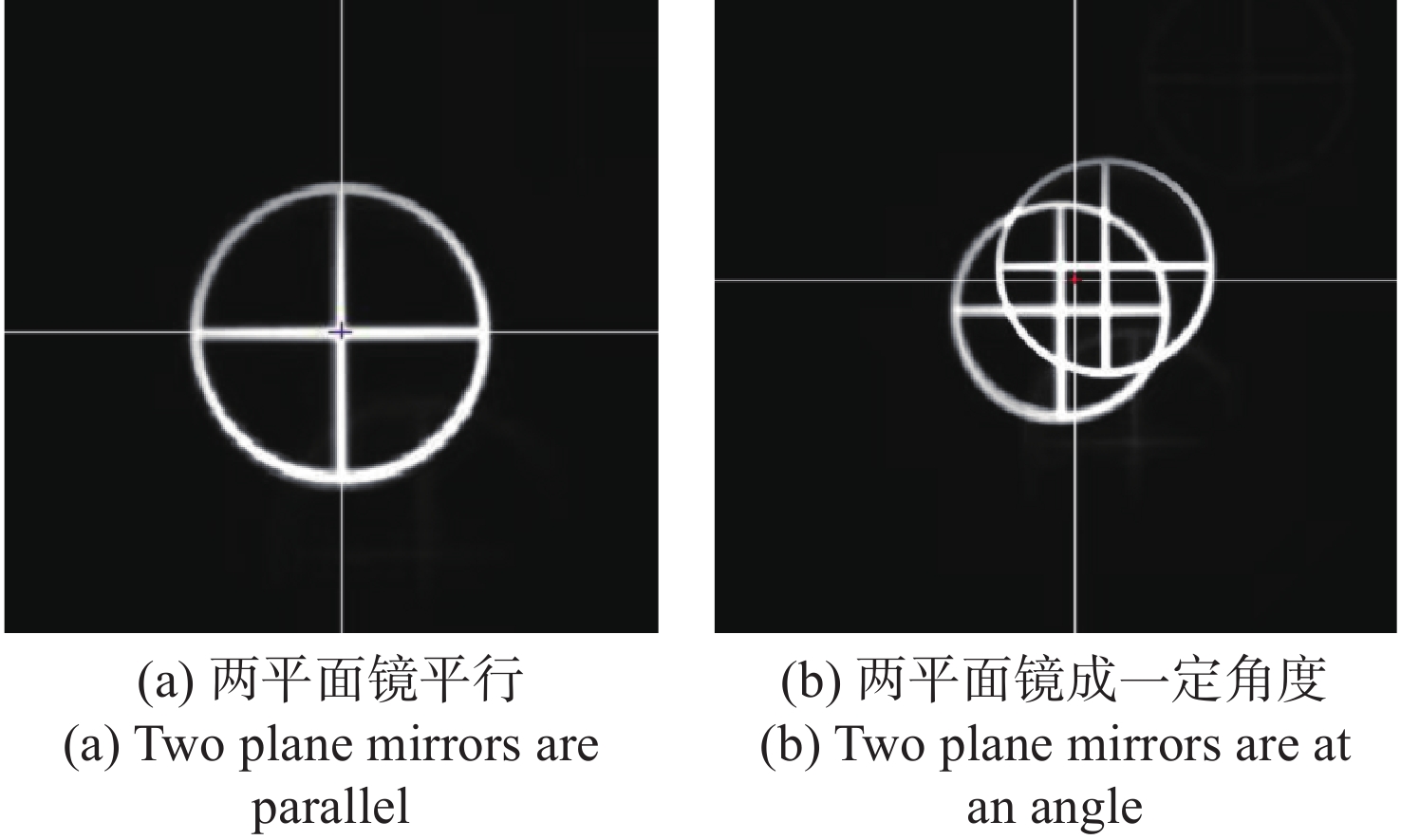
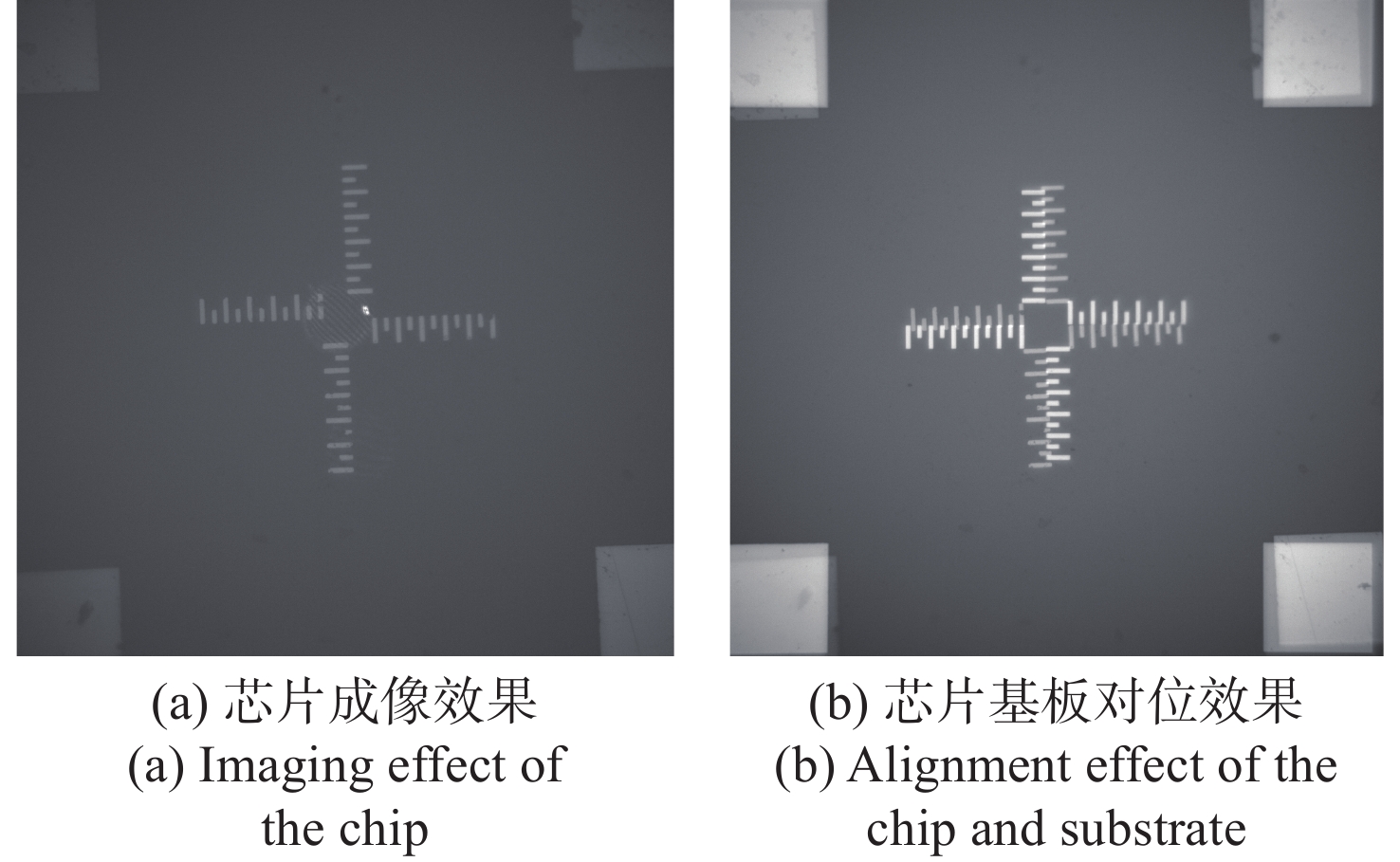
针对国内红外焦平面倒装焊机对高精度光学对位系统的迫切需求,对光学对位系统进行了设计及验证,并对该系统用到的平行调整、光学对位及坐标系误差补偿算法进行研究。文章首先对倒装焊接光学对位工艺进行分析;然后对平行性调整及光学对位算法进行介绍,并根据光学对位系统测试流程,提出更加合理的误差补偿算法;最后,以上述算法为理论依据,设计光学对位系统,其包括准直系统、显微成像系统和激光测距三部分。所设计的光学系统可实现平行性粗调,特征点识别及平行性精调功能。试验结果表明,准直系统准直效果较好,显微成像系统分辨率高,成像质量较好,激光测距系统的测距精度为0.084 μm。设计的高精度光学对位系统解决了国内红外焦平面倒装焊机对高精度光学对位系统的迫切需求,已经在国内某型号的倒装焊机中得到应用,对于提高国产高端集成电路的自主研发和生产能力具有非常重要的意义。



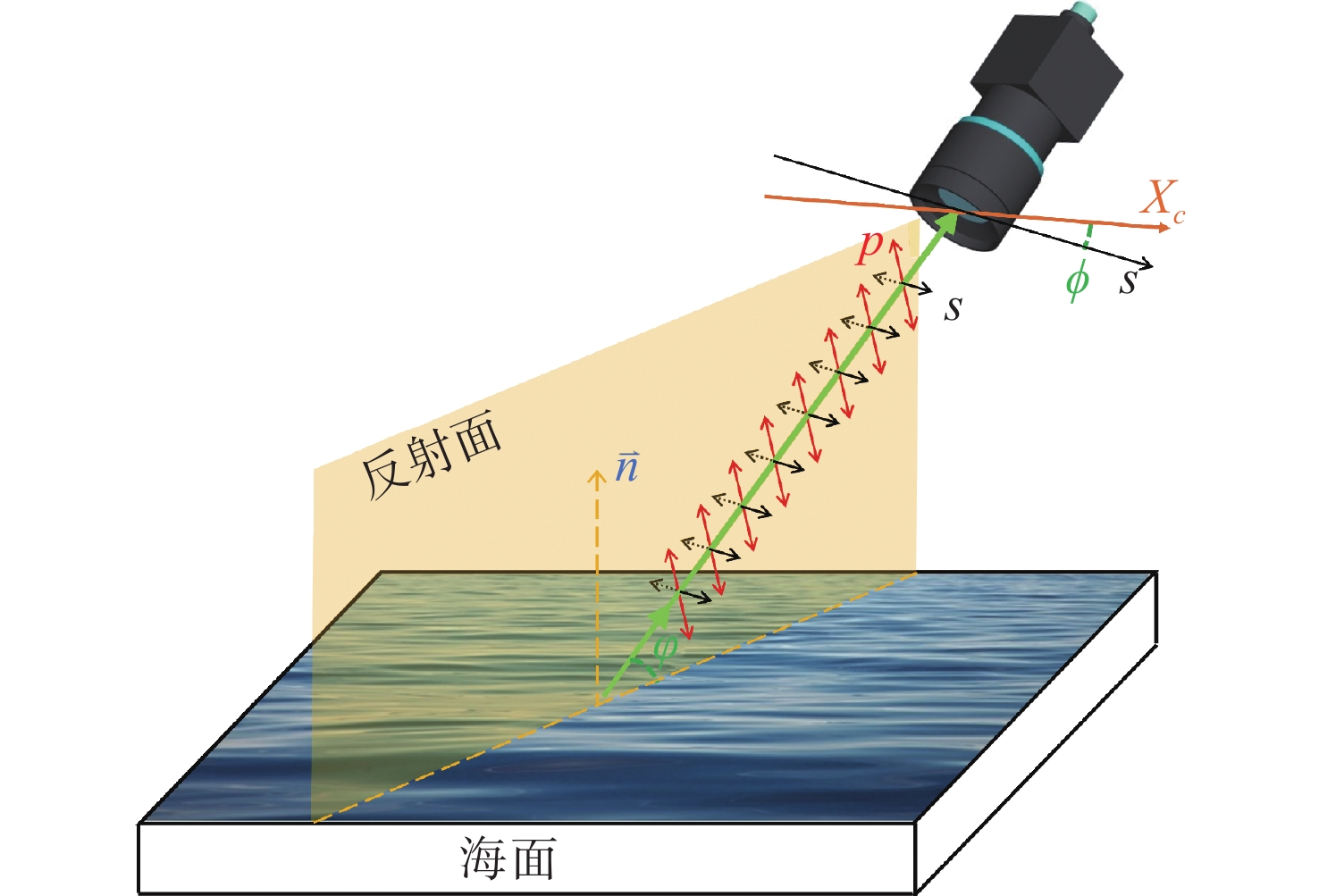
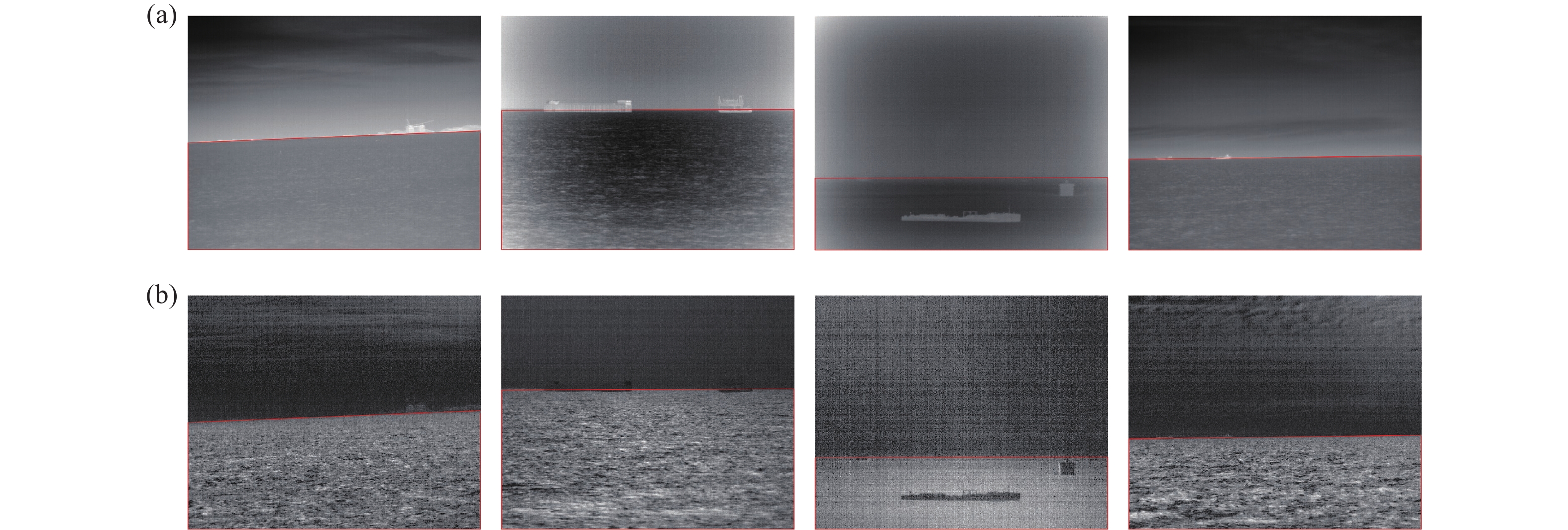
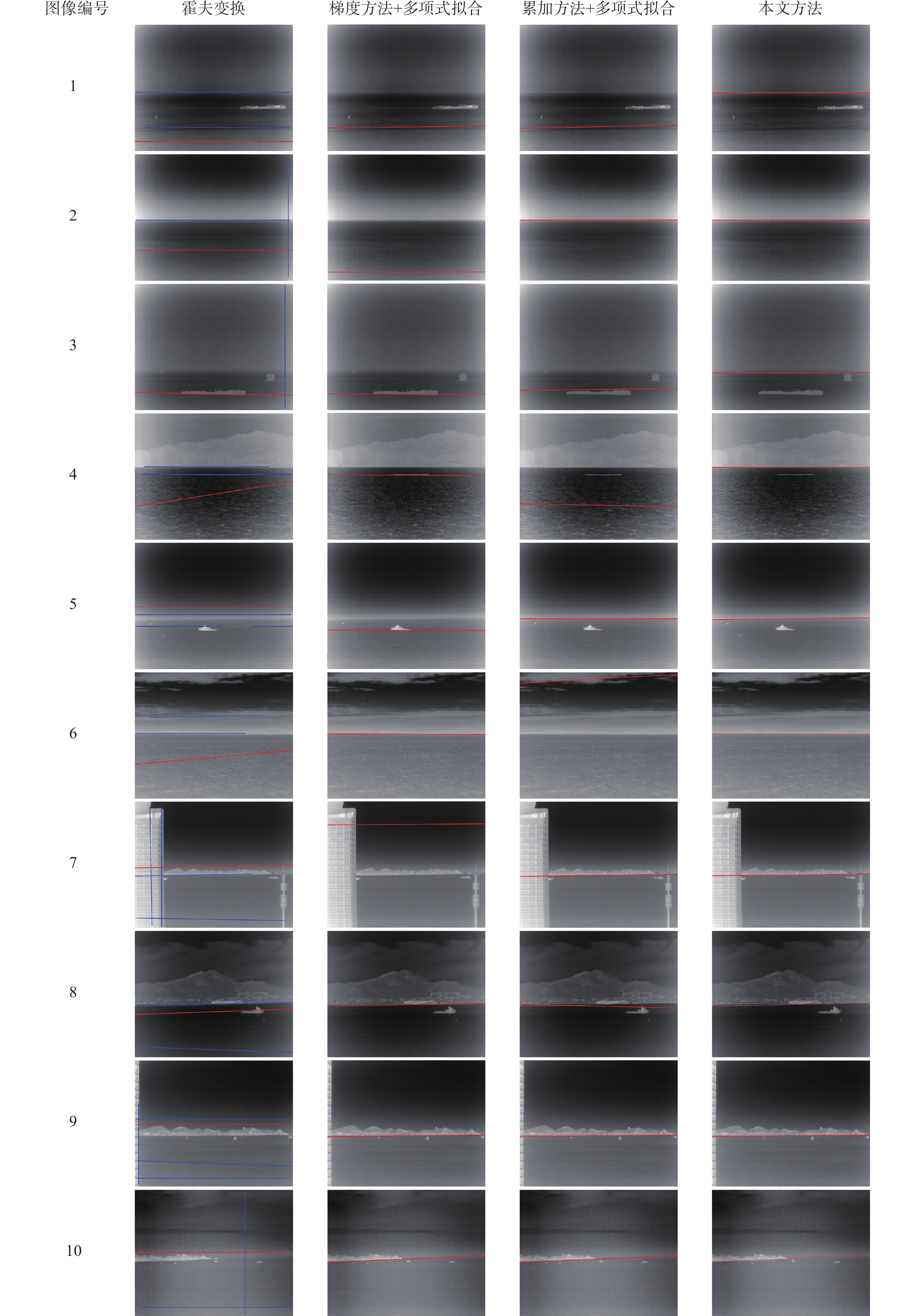
针对低对比度红外图像中海天线检测困难,且易受云层、条状波浪和海杂波等干扰因素影响的问题,提出了一种采用偏振差分图像进行海天线检测的方法。首先,利用偏振差分方法增强海面区域的局部对比度和海天线的信噪比;其次,对偏振差分图像采用大尺度的局部对比度累加方法确定海天线区域;最后,在海天线区域中采用梯度显著性及多项式拟合方法完成小尺度的海天线精确检测。该方法将偏振度、偏振角等多维信息融入海天线检测,并采用了大尺度与小尺度相结合的检测方法,能够有效克服云层、条状波浪和海杂波等因素的干扰。实验结果表明该算法的海天线检测准确率为98.5%,平均耗时16 ms,能够实现快速、准确的海天线检测,具有较强的场景适用性。



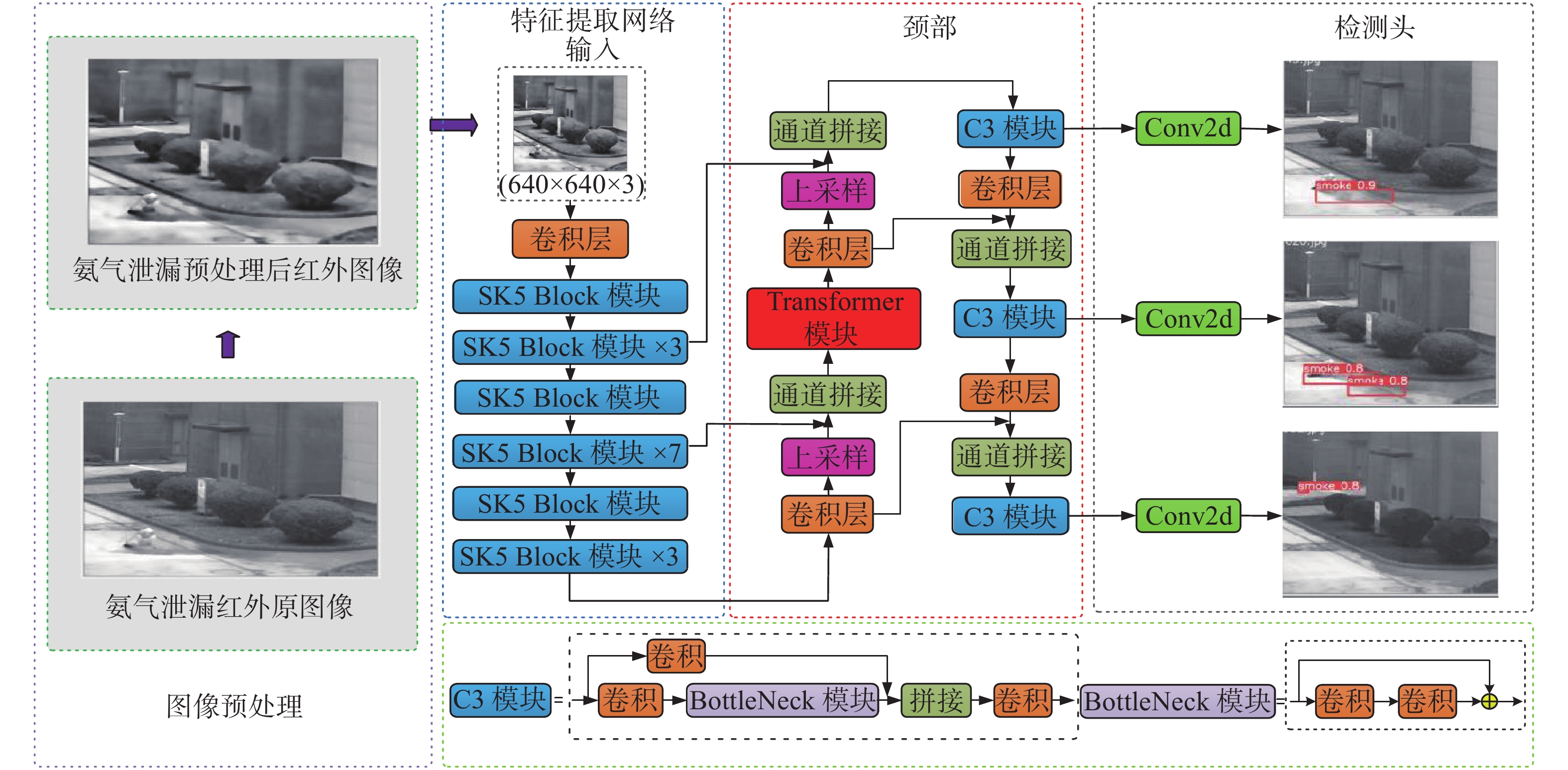
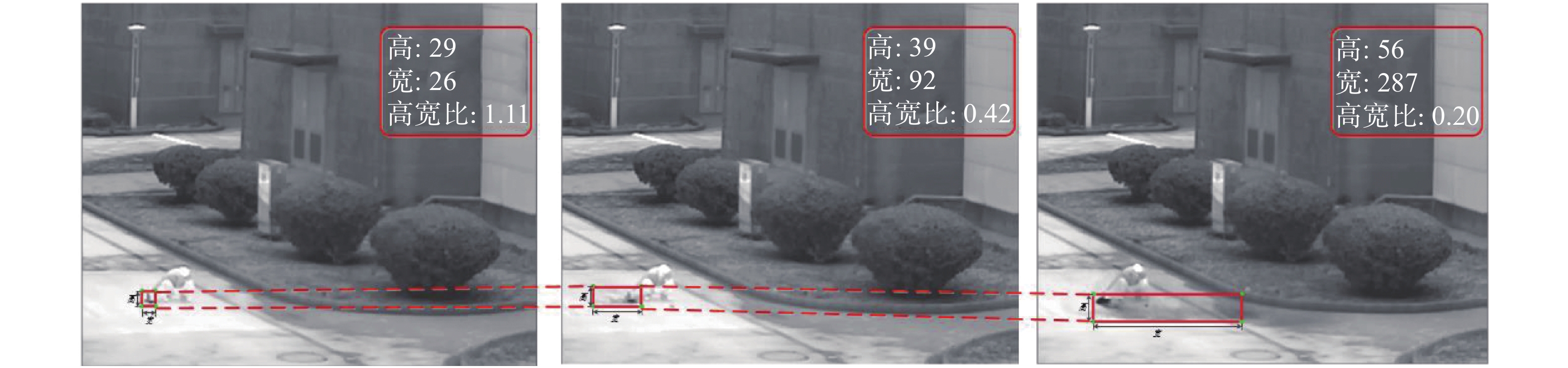
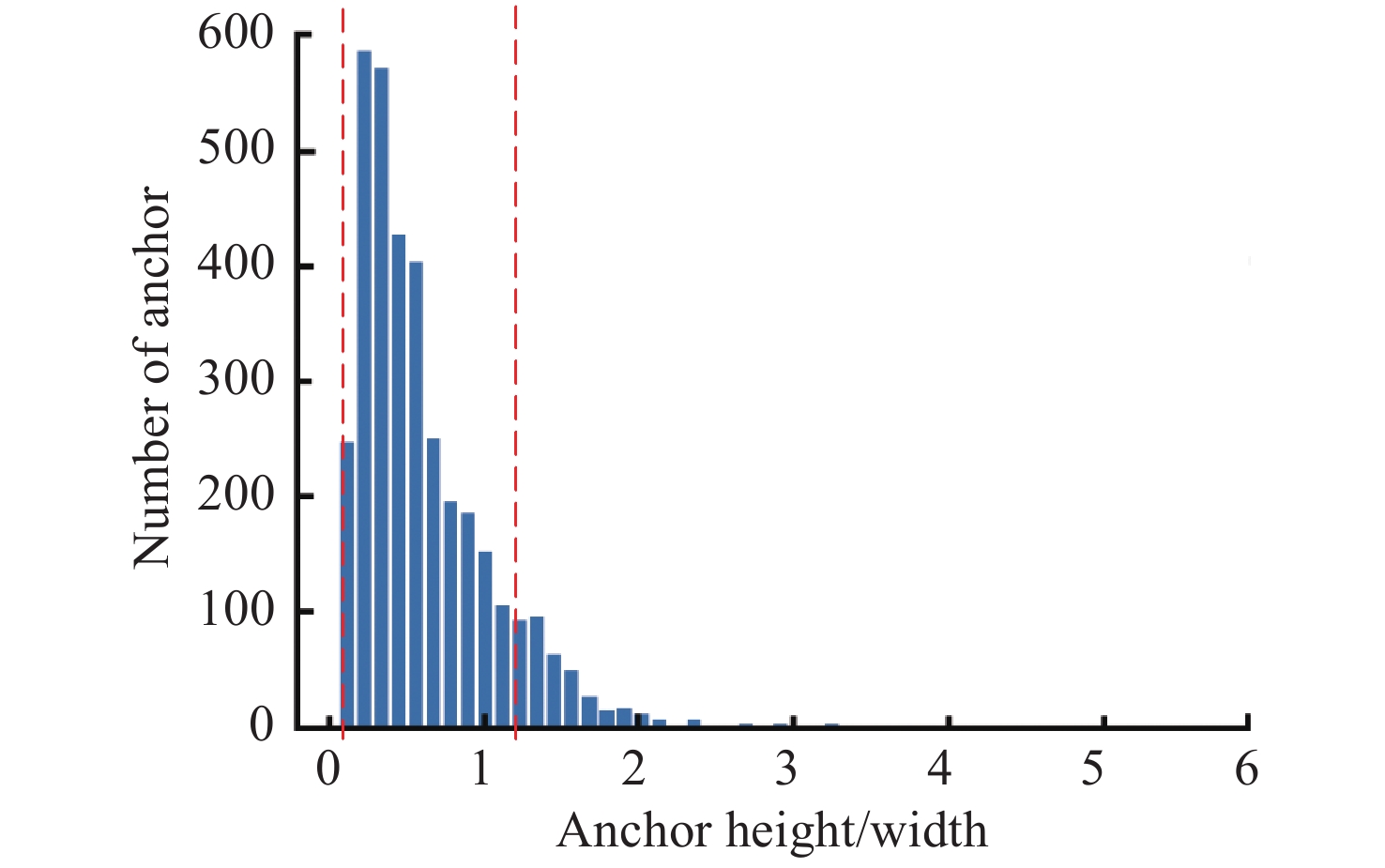
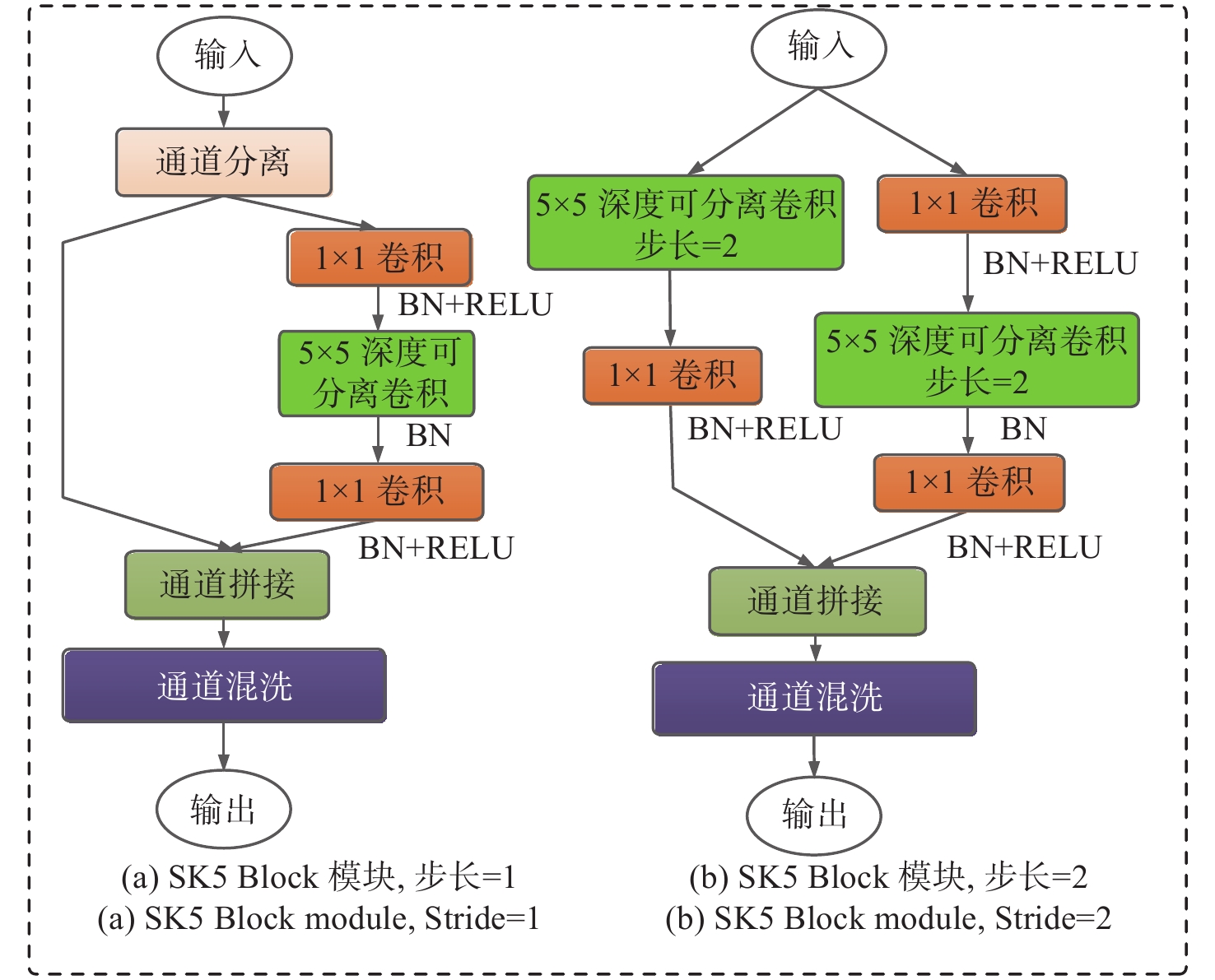
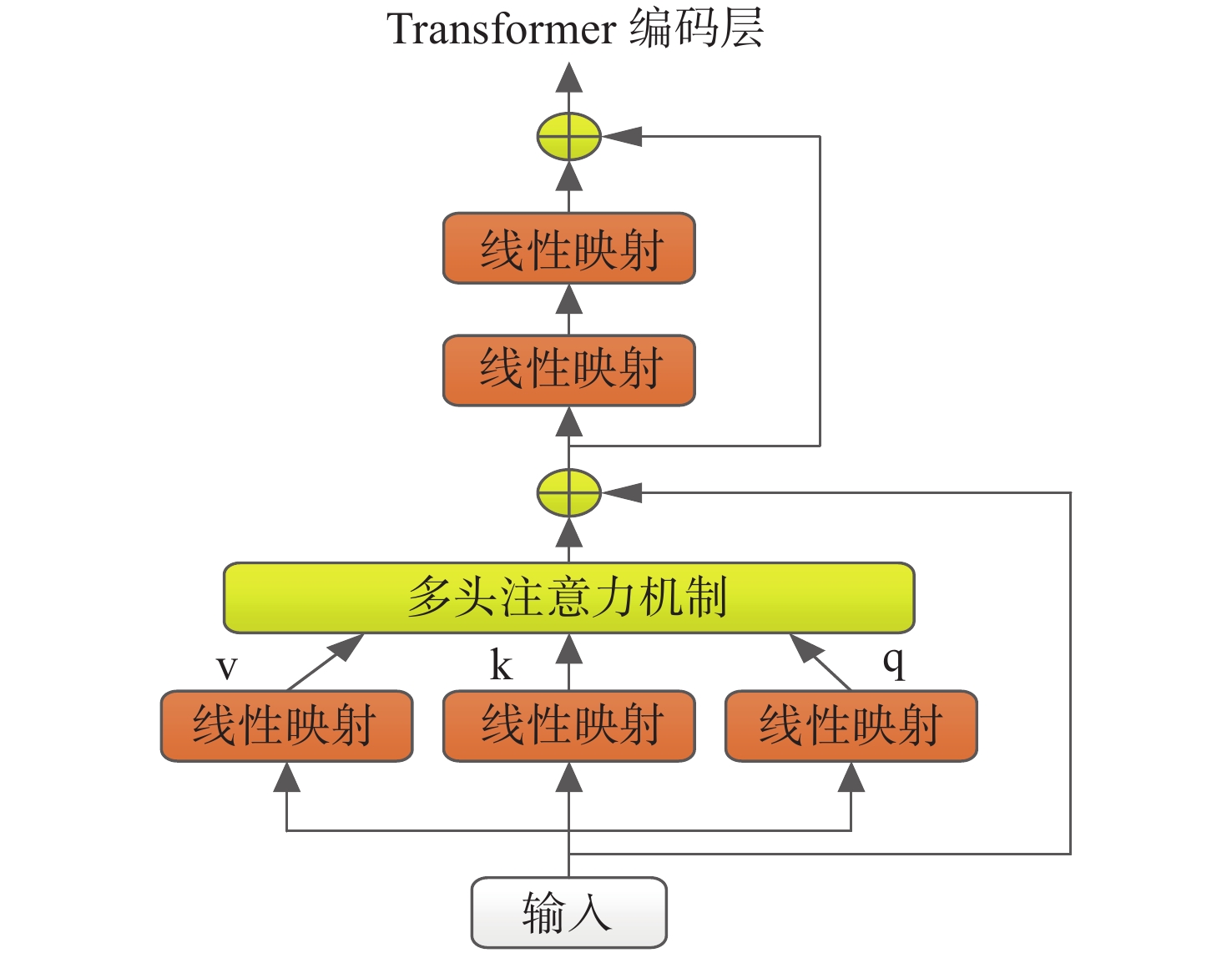
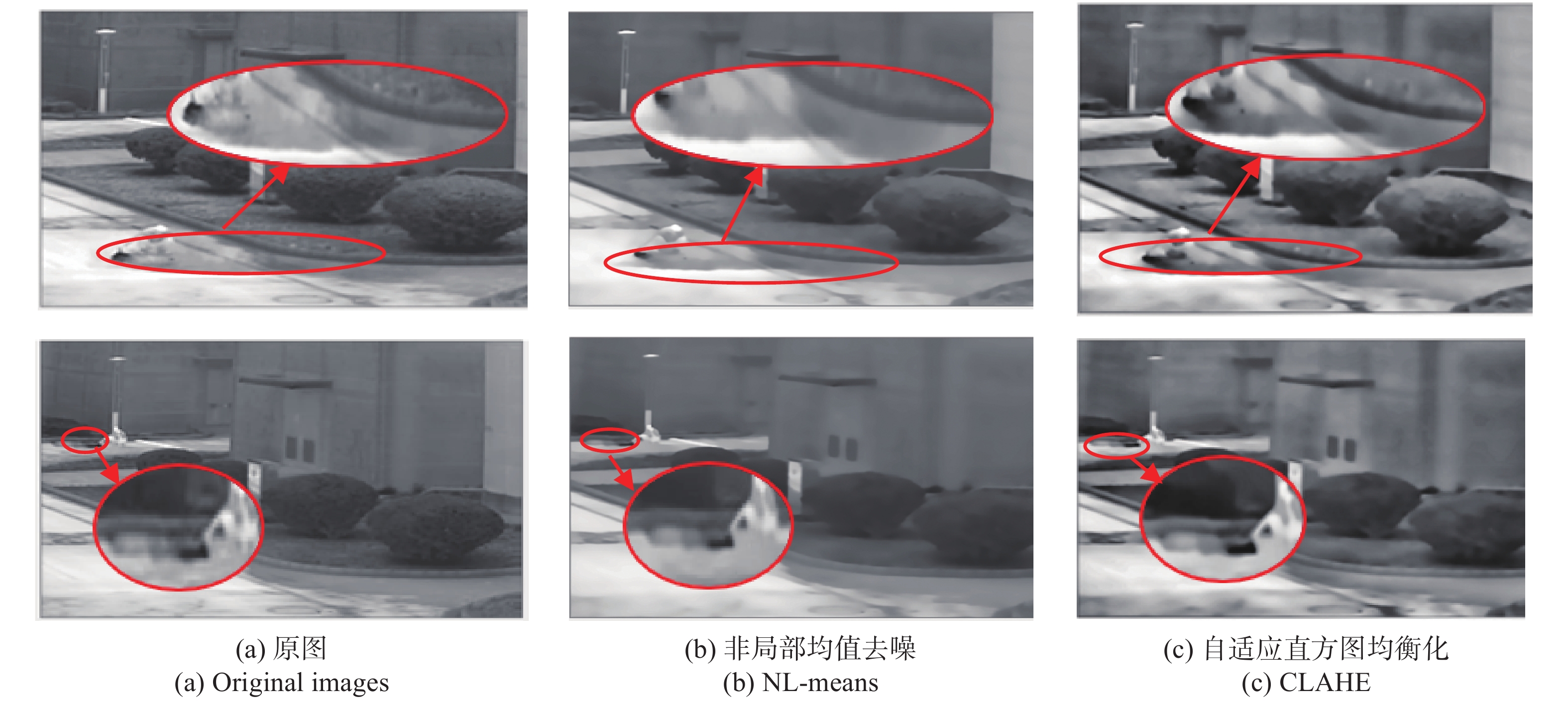
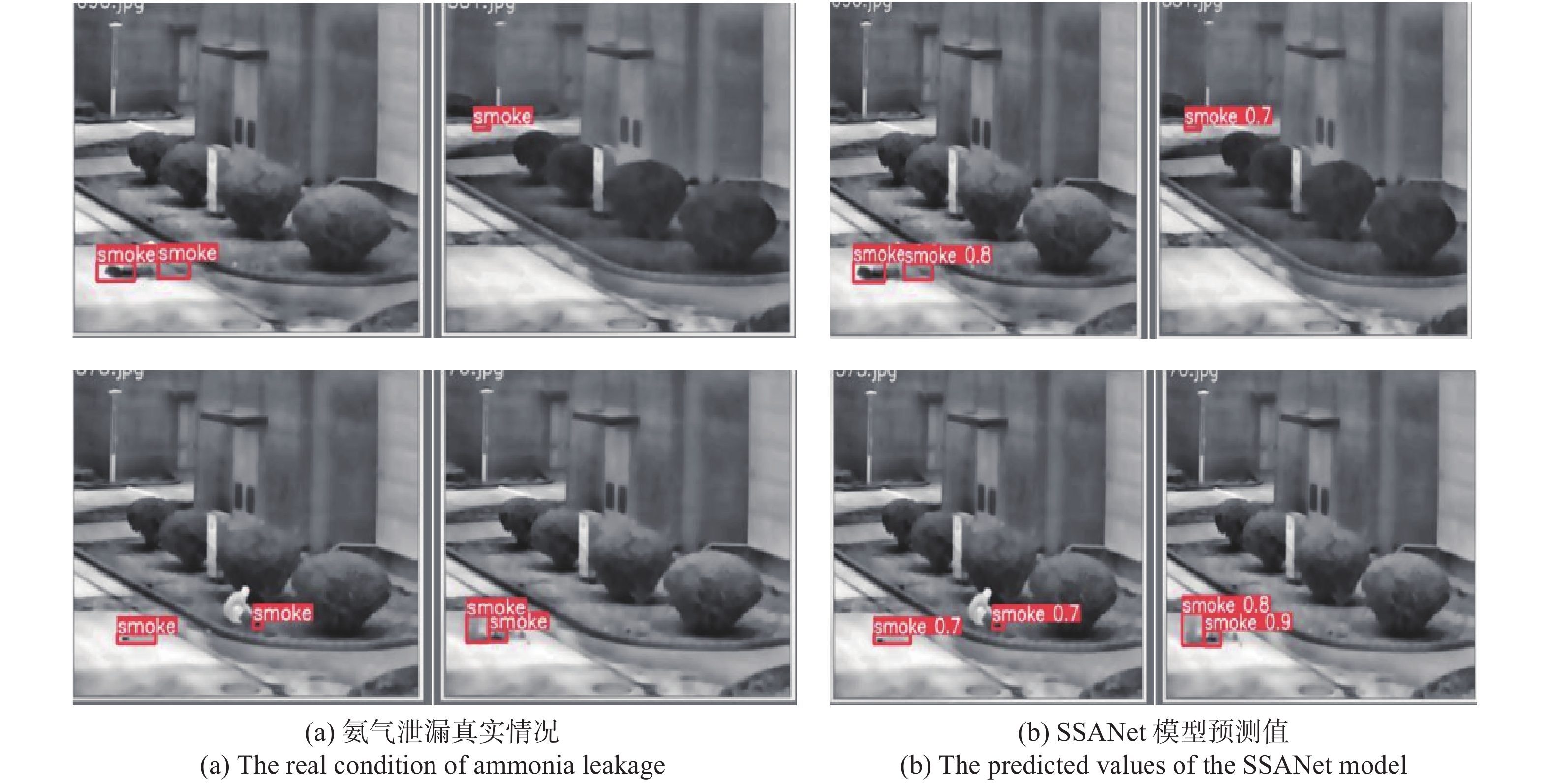
氨气是重要的基础工业原材料,实现其非接触探测对于及时发现氨气泄漏,避免重大安全事故发生具有重要意义。针对常规氨气泄漏检测装置需等到氨气扩散到一定范围并与传感器接触时才能响应的不足,提出一种混洗自注意力网络(SSANet)模型实现氨气泄漏红外非接触检测。因红外热像仪获取的氨气泄漏图像含噪高、对比度低,故通过非局部均值去噪、限制对比度的自适应直方图均衡化预处理建立氨气泄漏红外检测数据集。SSANet模型在YOLOv5s基础上通过K-means算法聚类分析出适用于氨气泄漏红外检测的候选框以预置模型参数;采用轻量级ShuffleNetv2网络,将其Shuffle Block中的3×3的深度可分离卷积核替换为5×5,采用含有新卷积模块的SK5 Block对特征提取网络进行重构,使模型大小、计算量和参数量实现轻量化的同时提高检测精度;采用Transformer模块代替原网络瓶颈模块中的C3模块实现泄漏区域多头注意力自底向上融合,实现检测精度的再次提升。实验结果表明,SSANet模型较YOLOv5s基础模型大小和参数量分别减少76.40%、78.30%,降为3.40 M、1.53 M;单张图像平均检测速度提升1.10%,达到3.20 ms;平均检测精度提升3.50%,达到96.30%。本文为开发氨气泄漏非接触探测装置以保障涉氨企业的安全生产和稳定运行提供了一种有效的检测算法。


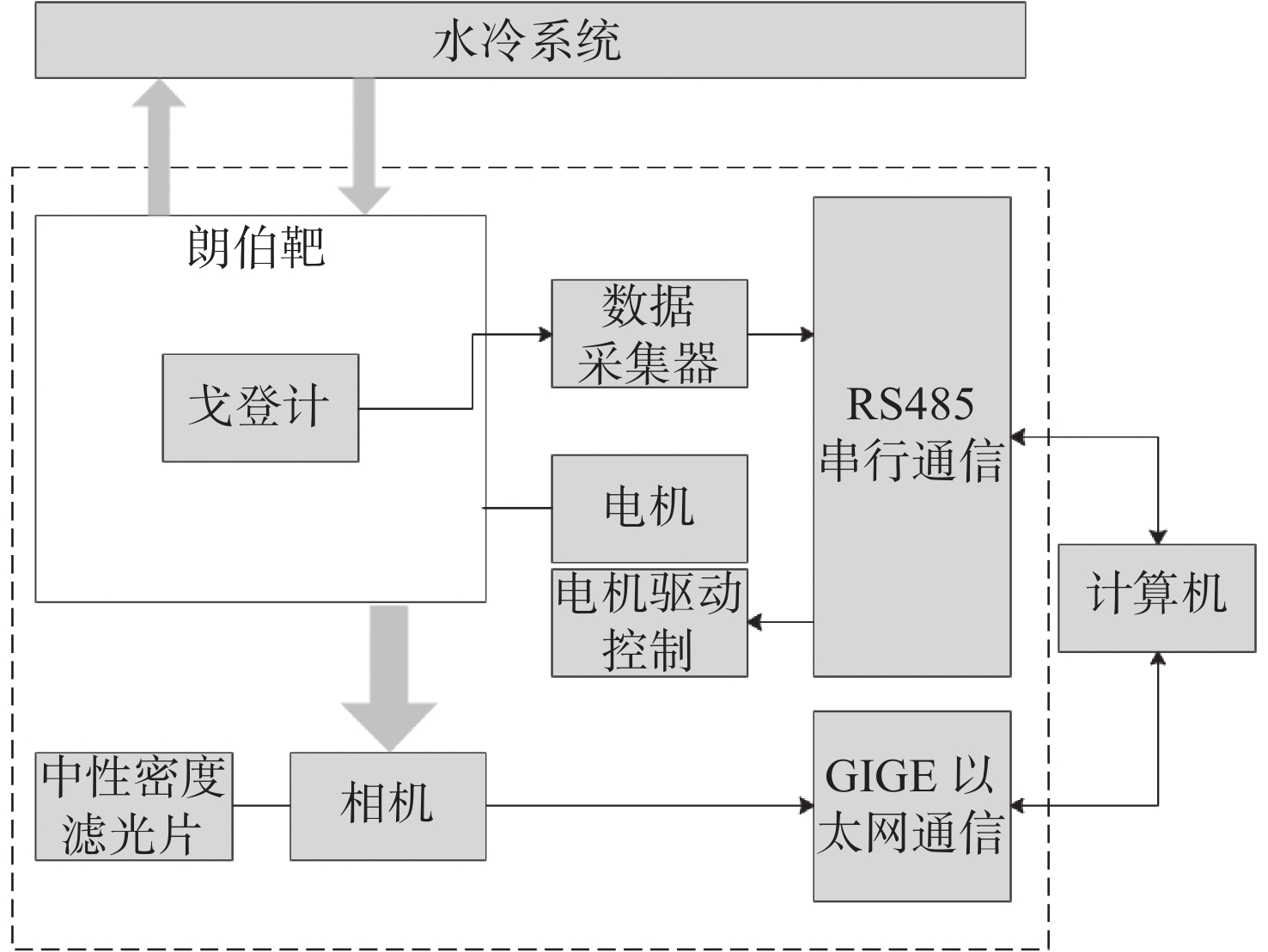
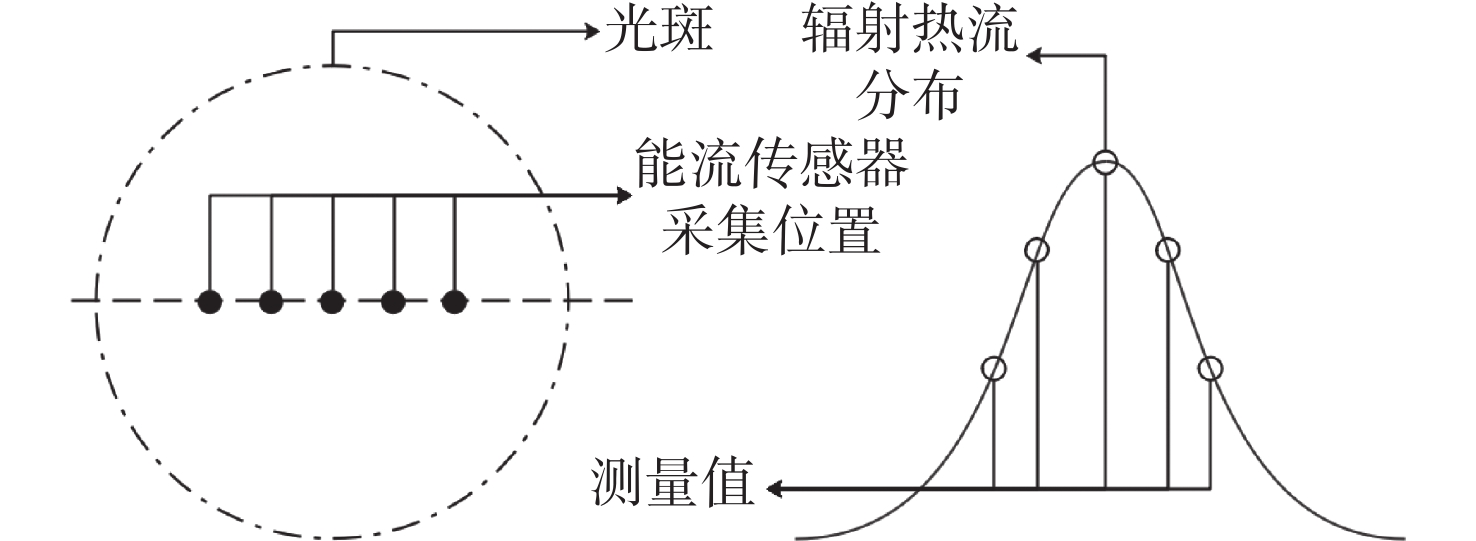
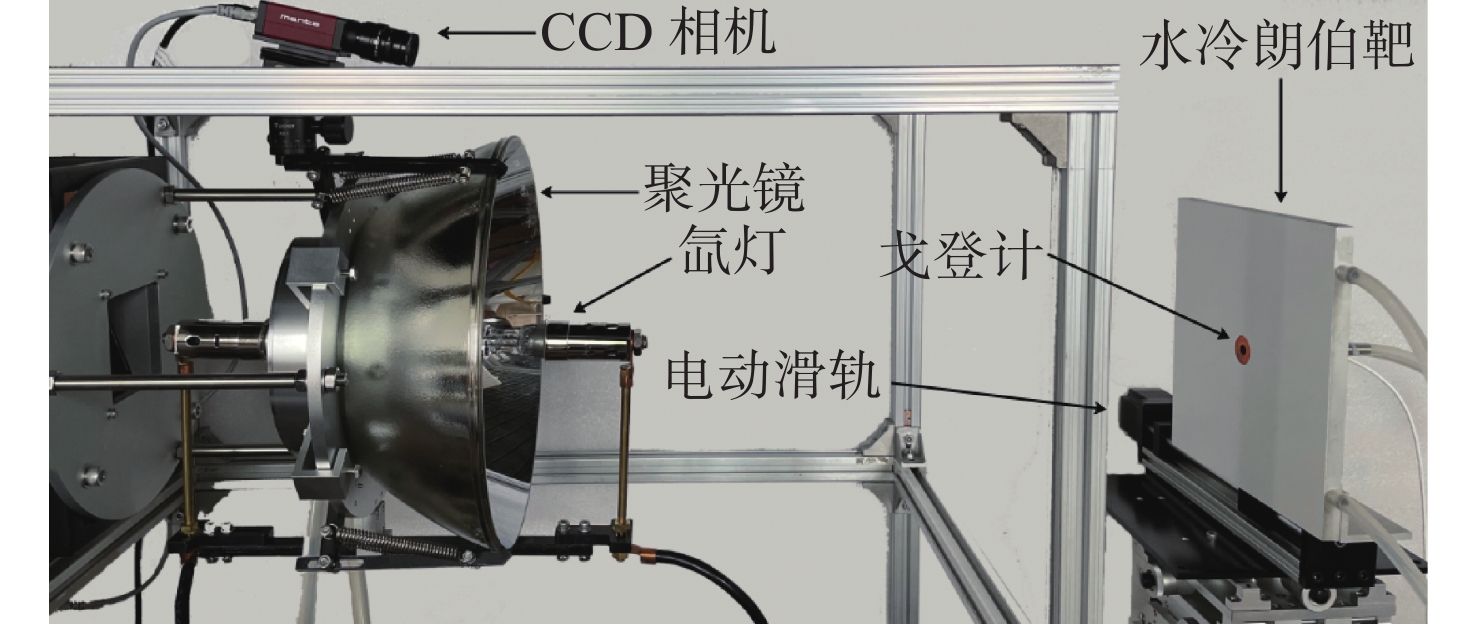
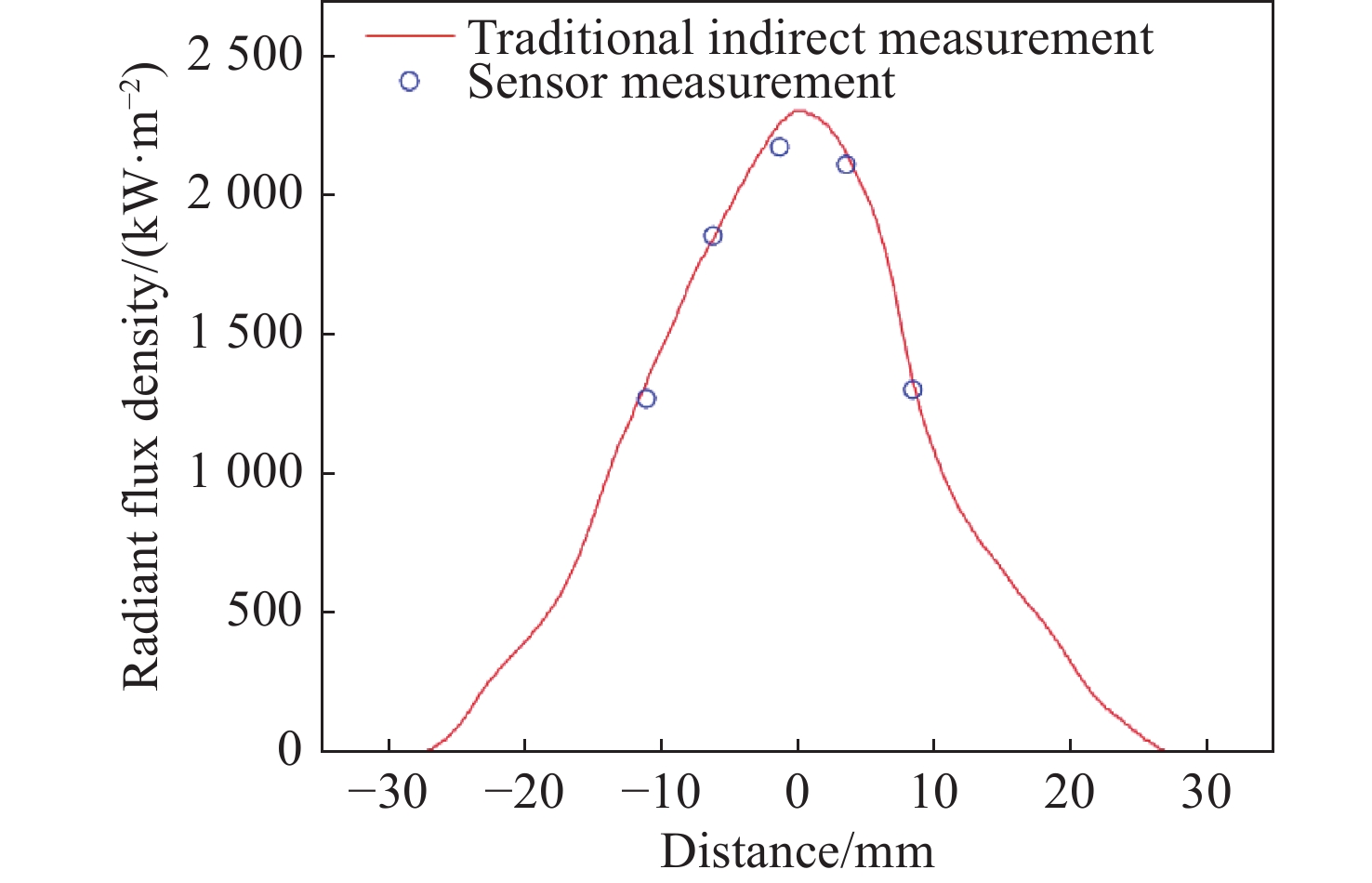
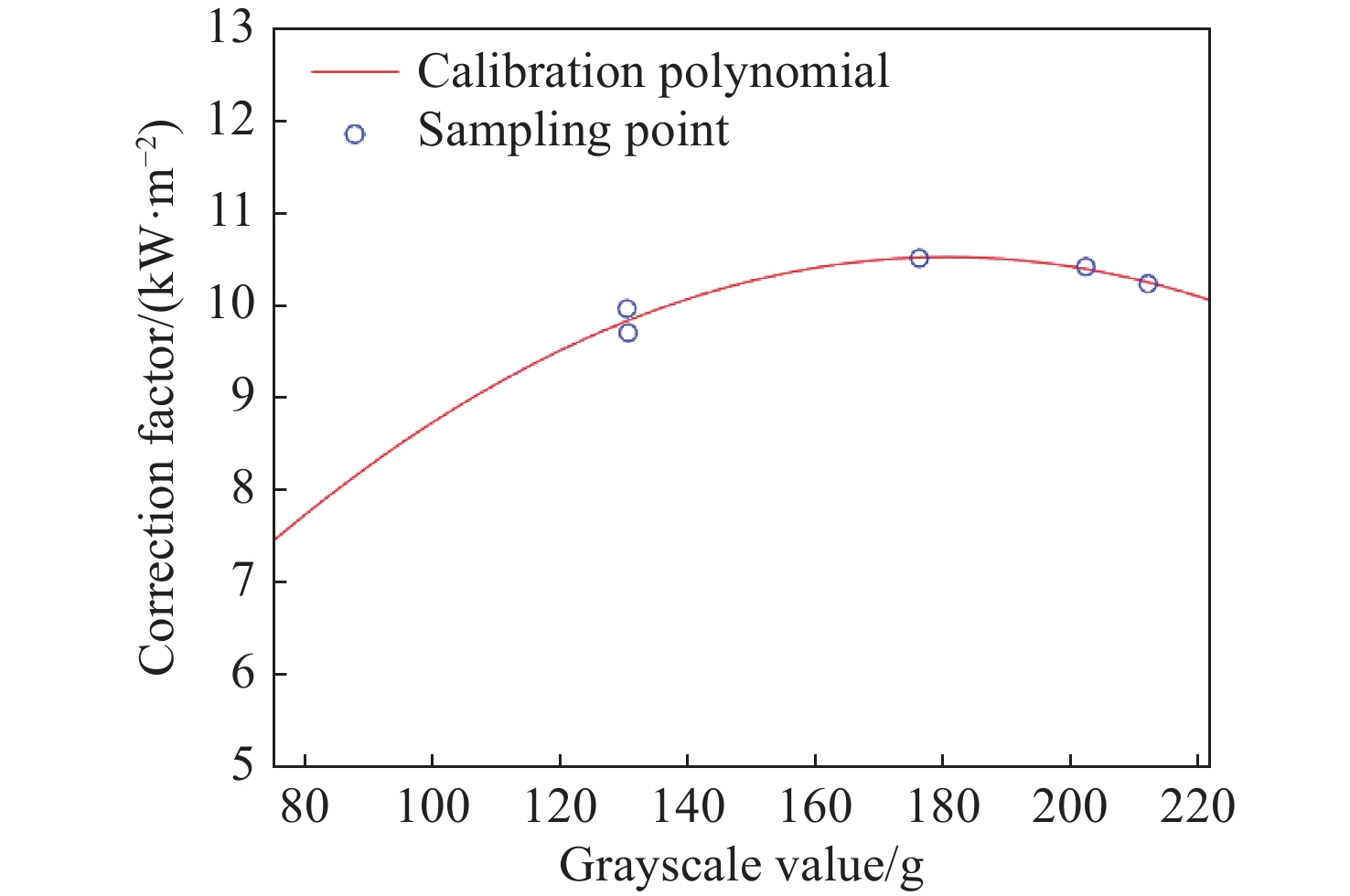
本文提出了一种高倍汇聚辐射光斑能流分布测量新方法,采用辐射能流传感器测量光斑不同位置的能流密度,通过多项式拟合光斑不同位置的灰度与能流密度标定曲线,最终获得辐射光斑的能流分布,并详细阐述了辐射光斑能流分布的测量原理。为了验证测量方法的准确性和可行性,进行了高倍汇聚辐射光斑能流分布测量实验,并与辐射能流传感器测量结果进行比较。结果表明:该测量方法的测量结果与辐射能流传感器的直接测量结果一致,测量偏差小于0.54%,通过分析得出该测量方法的测量不确定度为4.35%,测量准确度较传统测量方法有所提高,满足实际应用需求。




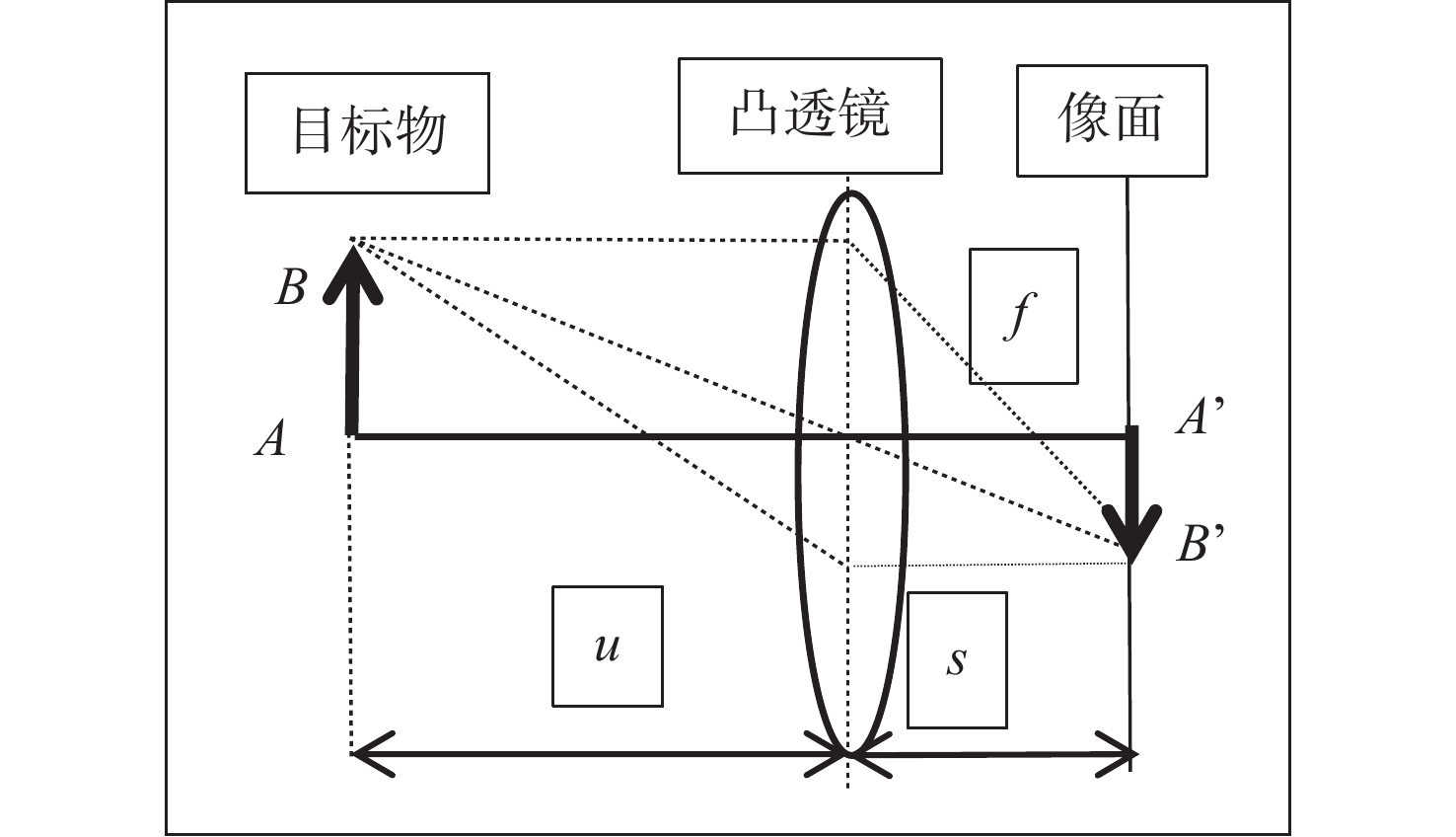
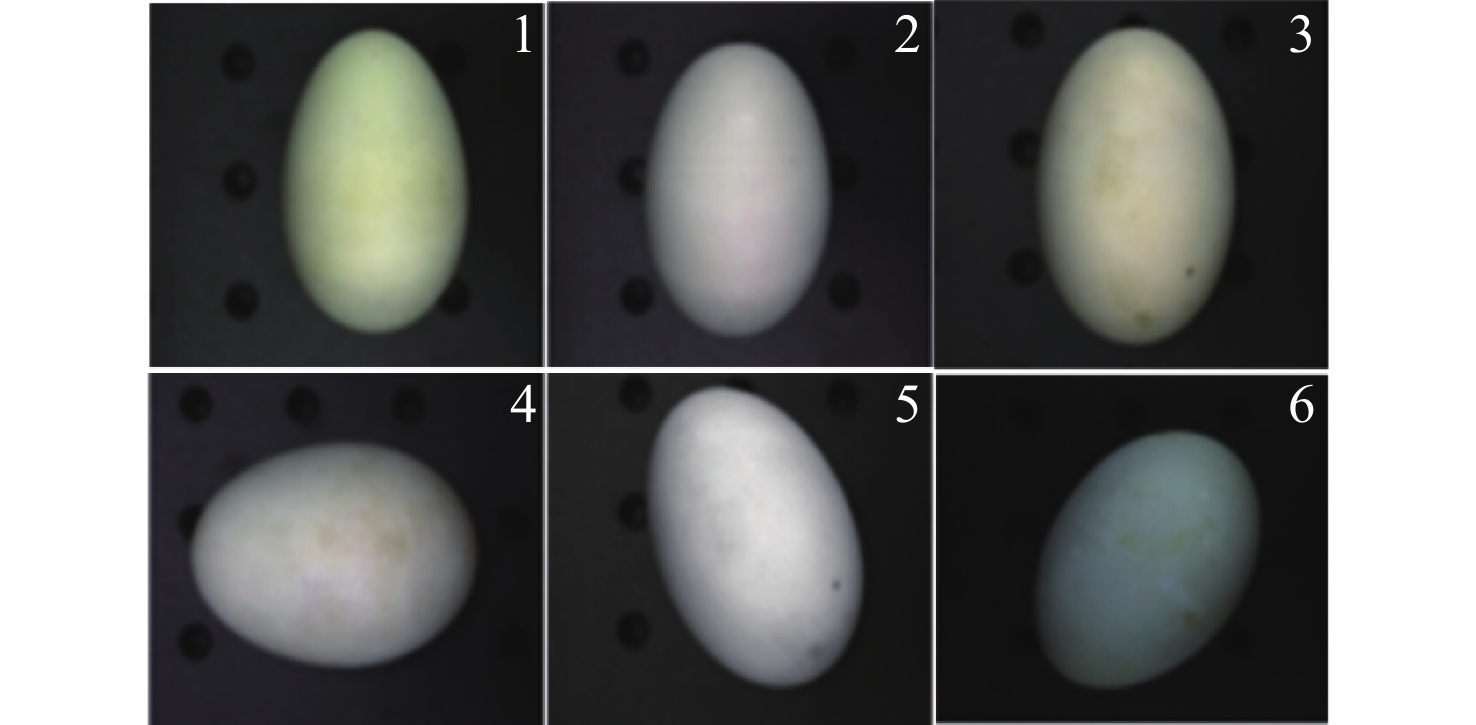
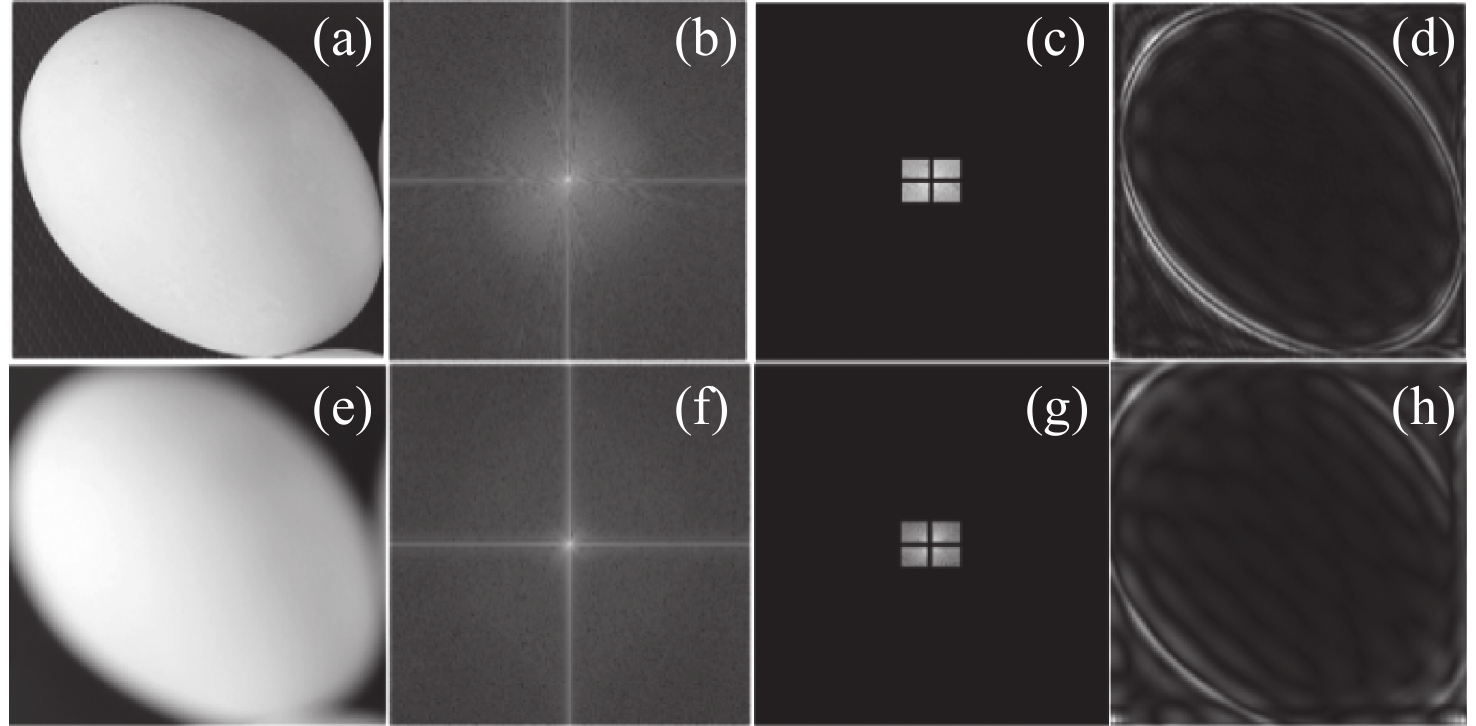
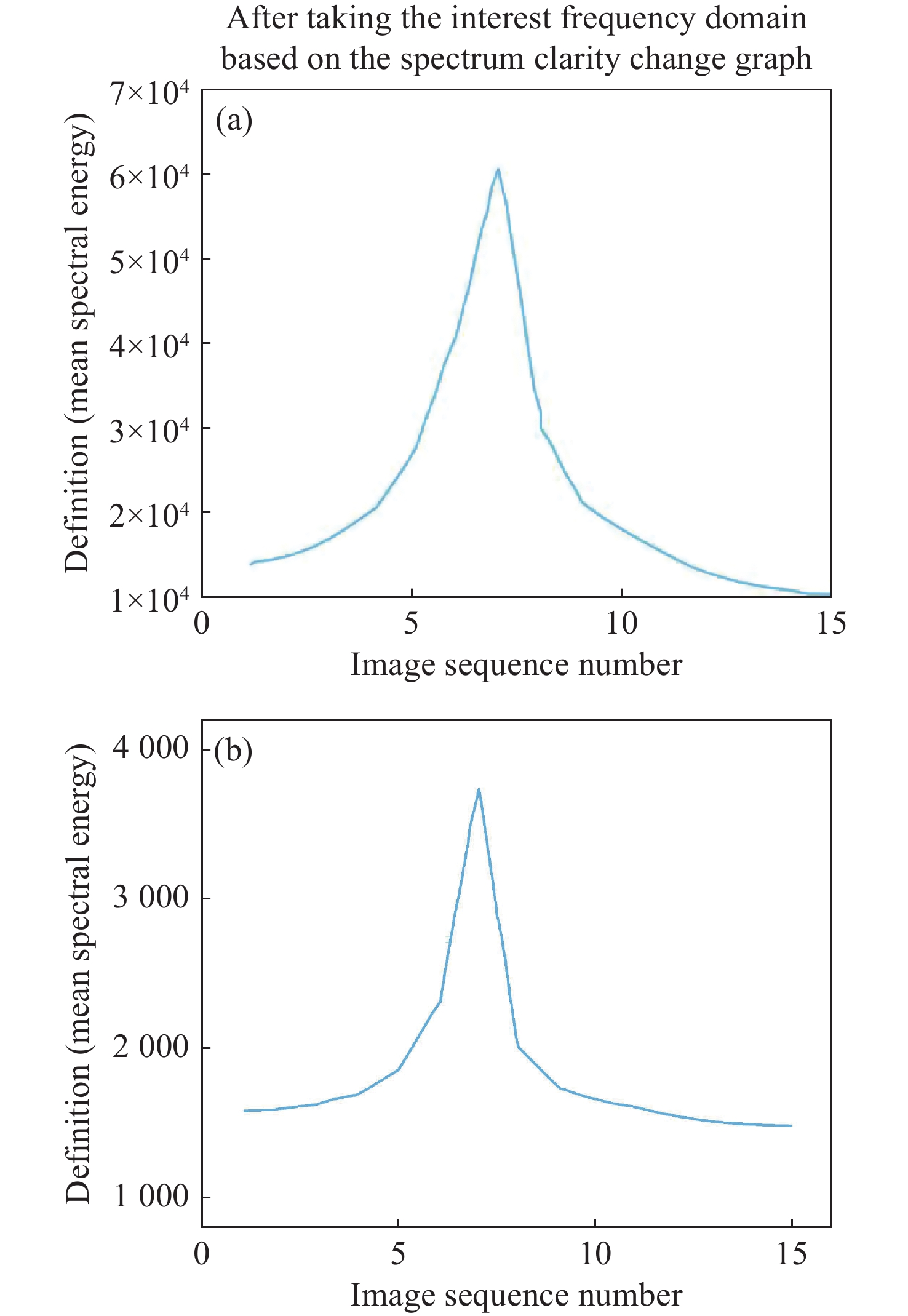
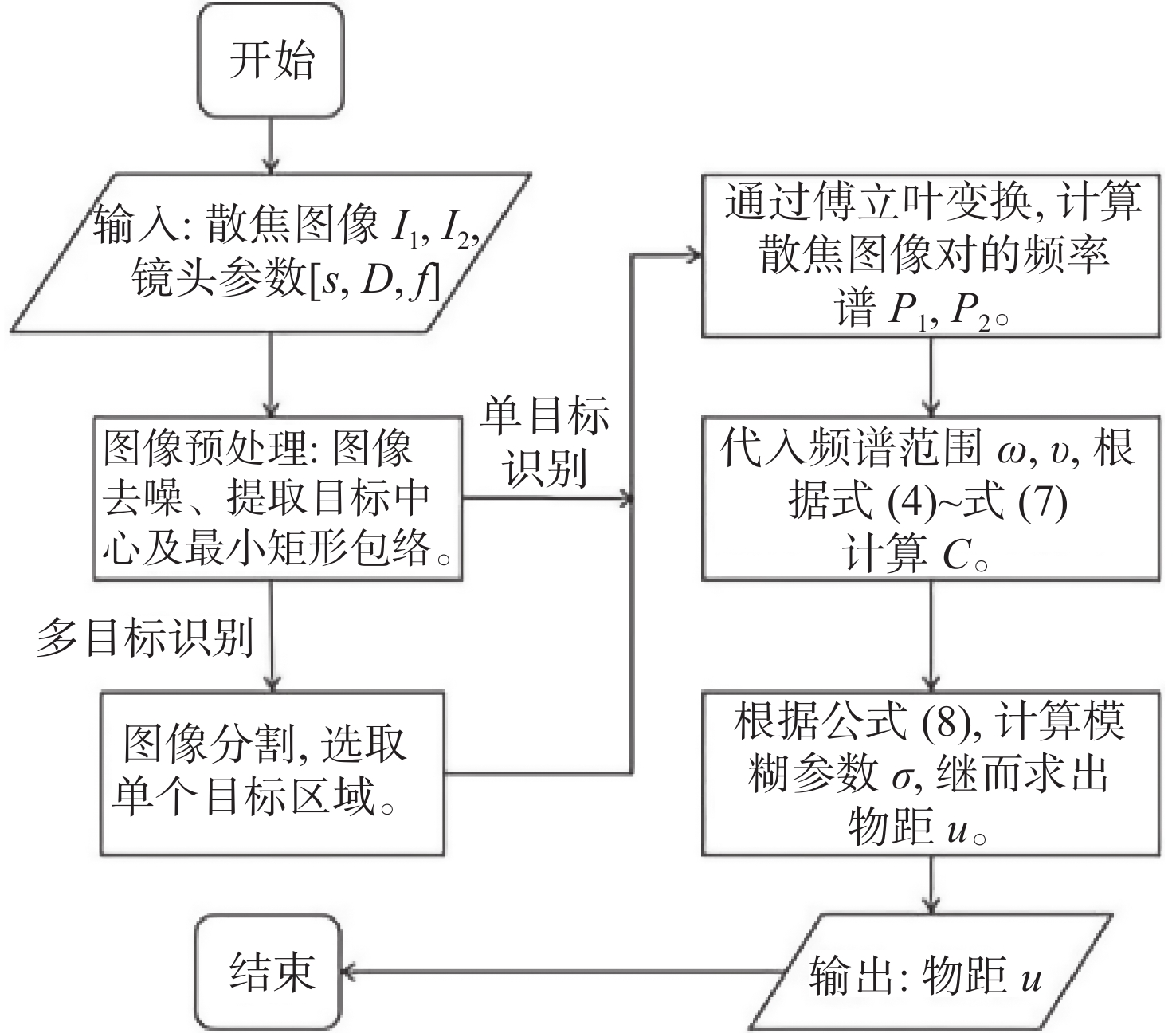
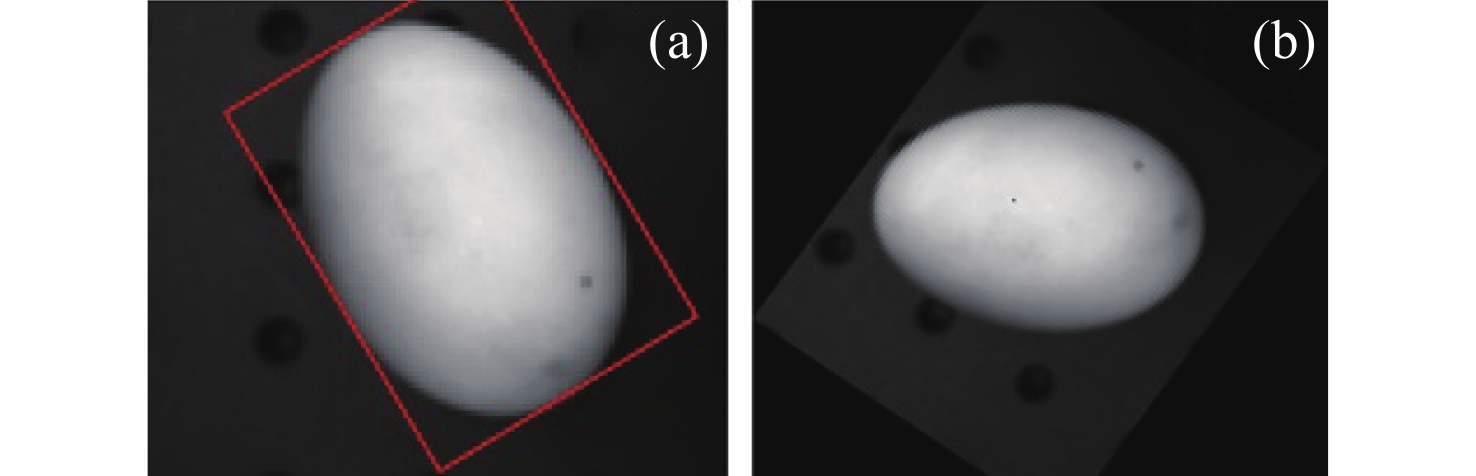
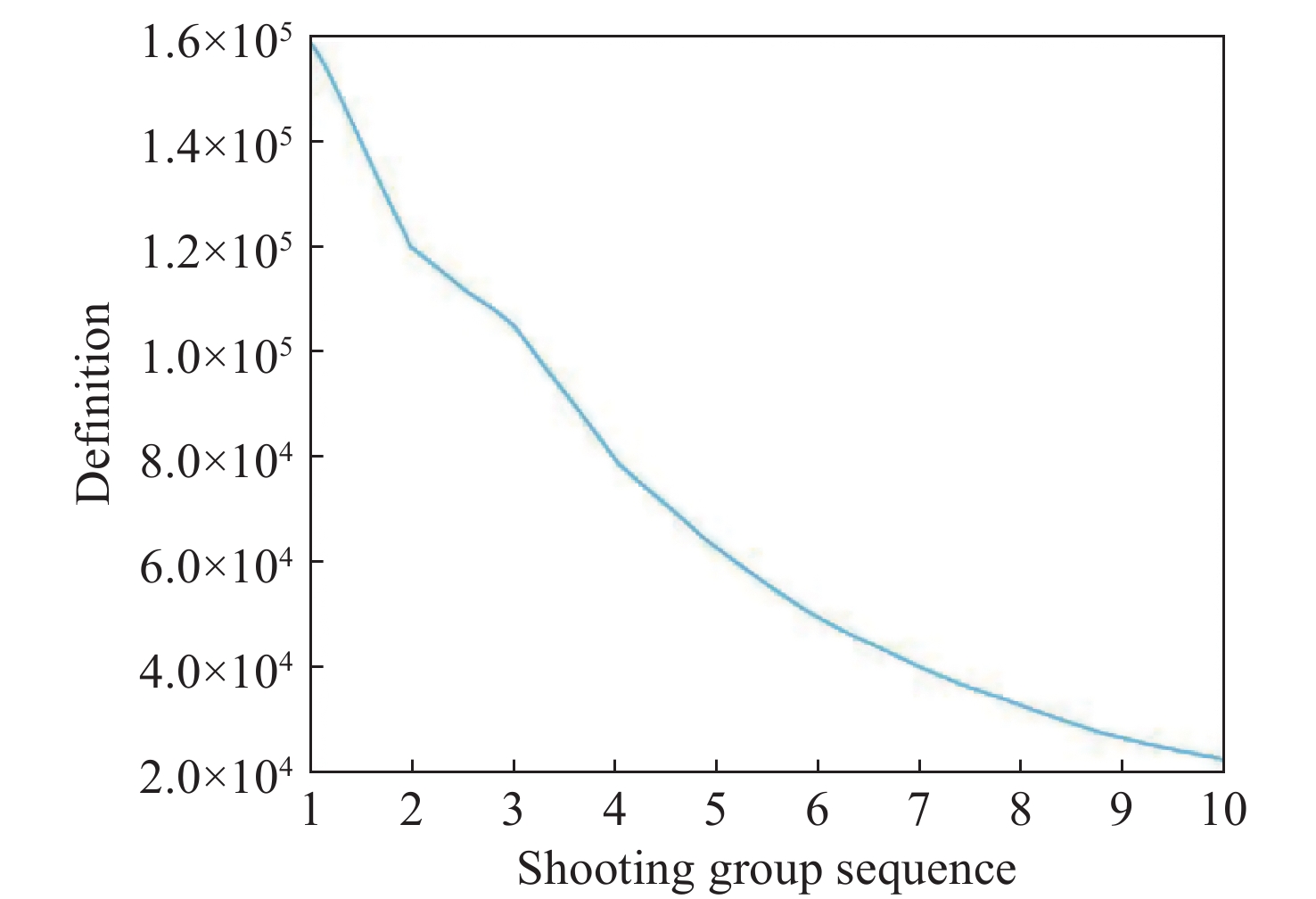
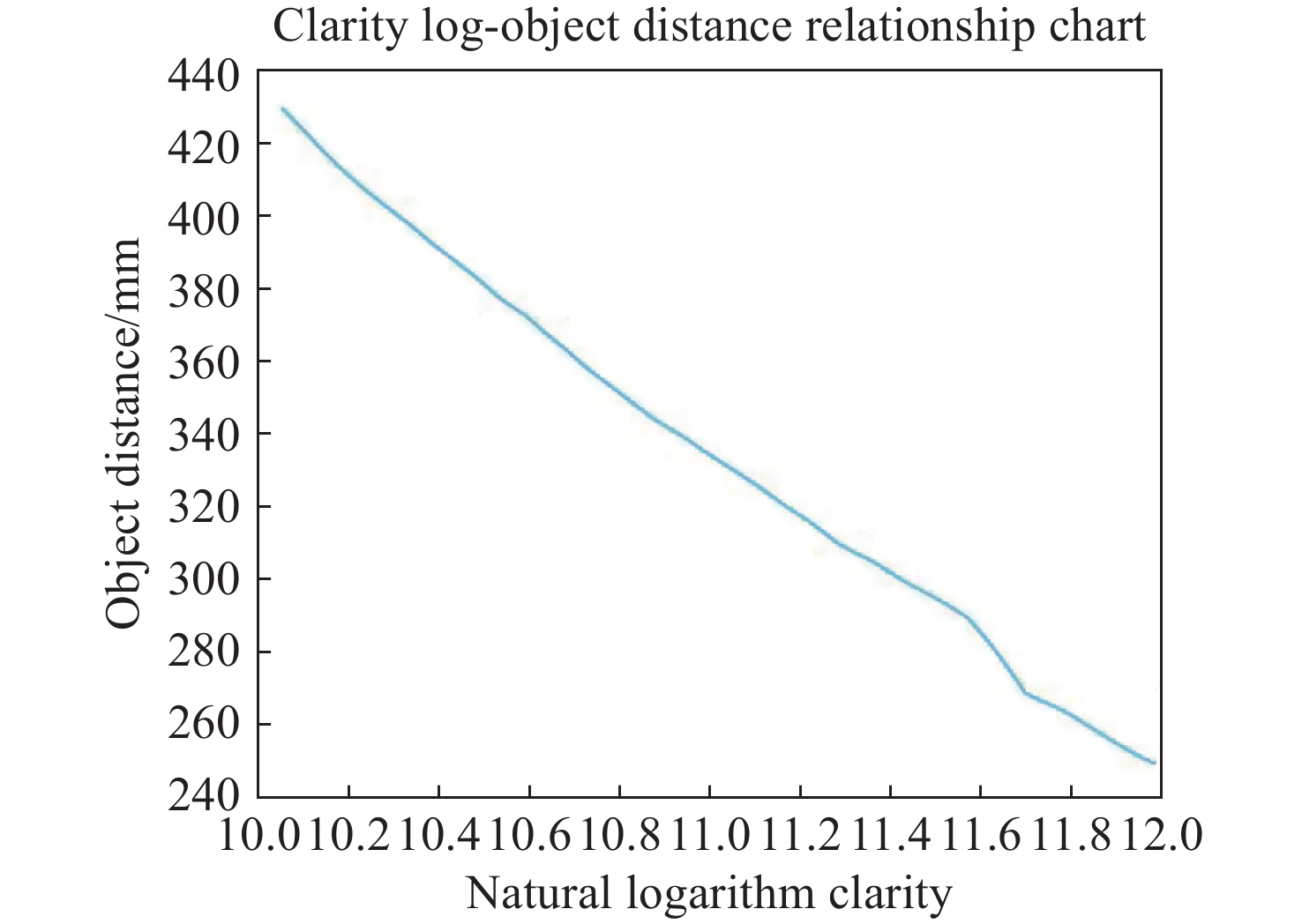
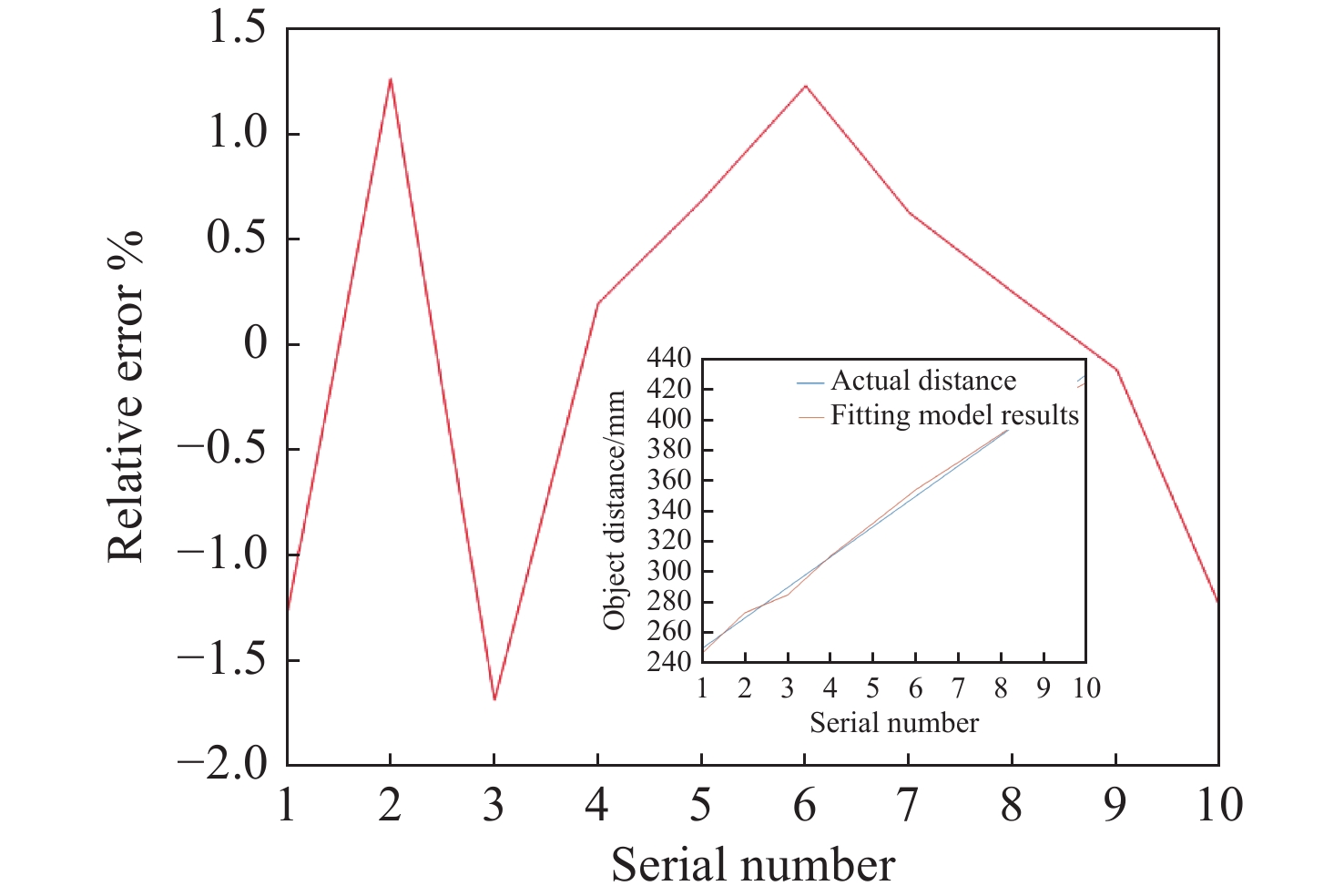
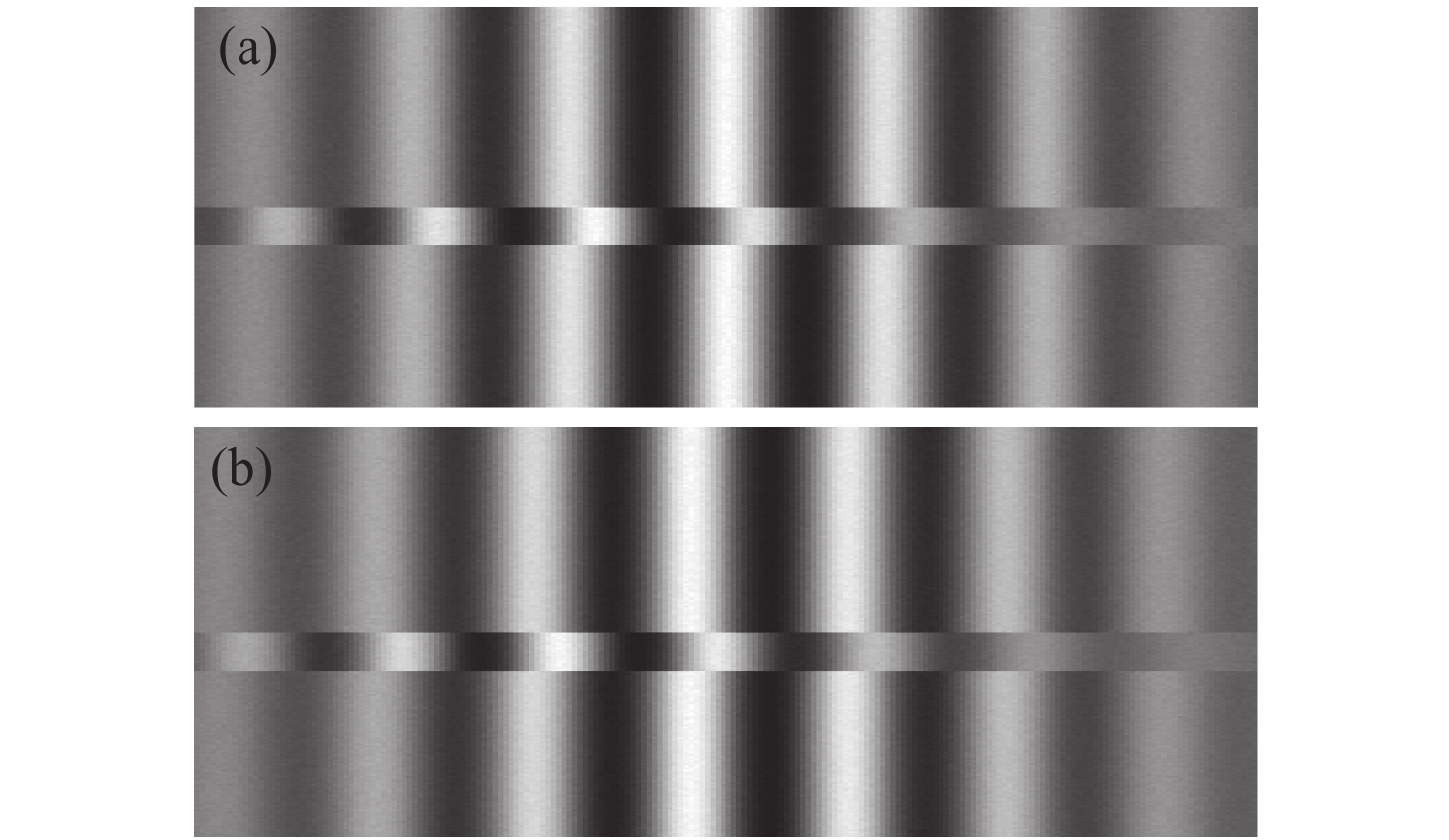
为了实现基于单目相机的弱或无表面纹理特征目标精确测距,提出了一种基于保留边缘频谱信息的改进散焦图像测距算法。通过对比以傅立叶变换和拉普拉斯变换为计算核心的两种经典散焦测距理论,构建相应的清晰度评价函数,根据灵敏度更好的频谱清晰度函数选择基于频谱的散焦测距法,并根据频谱清晰度函数在保留目标边缘信息的基础上选择频域计算范围,从而进行测距。为验证算法的可行性,本文采用6组不同的鸭蛋样本,获取不同光圈、不同距离的散焦图像,利用该改进算法求解鸭蛋到相机镜头的距离。实验结果表明,基于边缘频谱保留的散焦图像测距改进算法具有良好的测距效果,相关系数为0.986,均方根误差为11.39 mm,并发现对于斜放拍摄的鸭蛋图像进行图像旋转处理后,可有效地提升测距能力,均方根误差从11.39 mm下降至8.76 mm,平均相对误差从2.85%下降至2.28%,相关系数提升至0.99。基本满足了弱或无表面纹理特征目标测距的稳定、精度等要求。





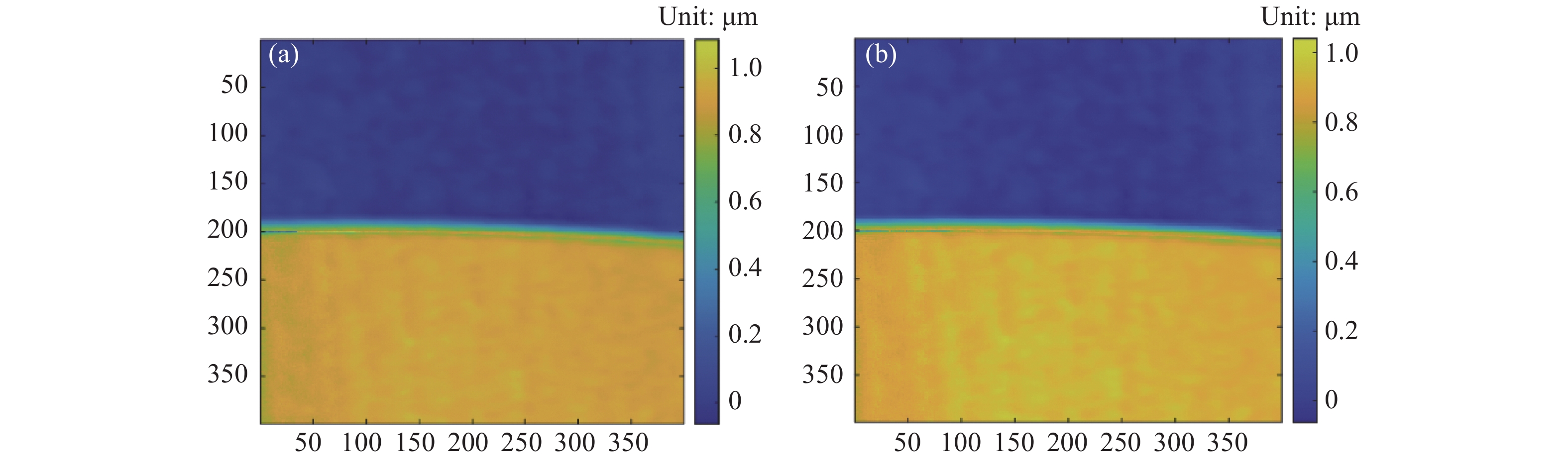
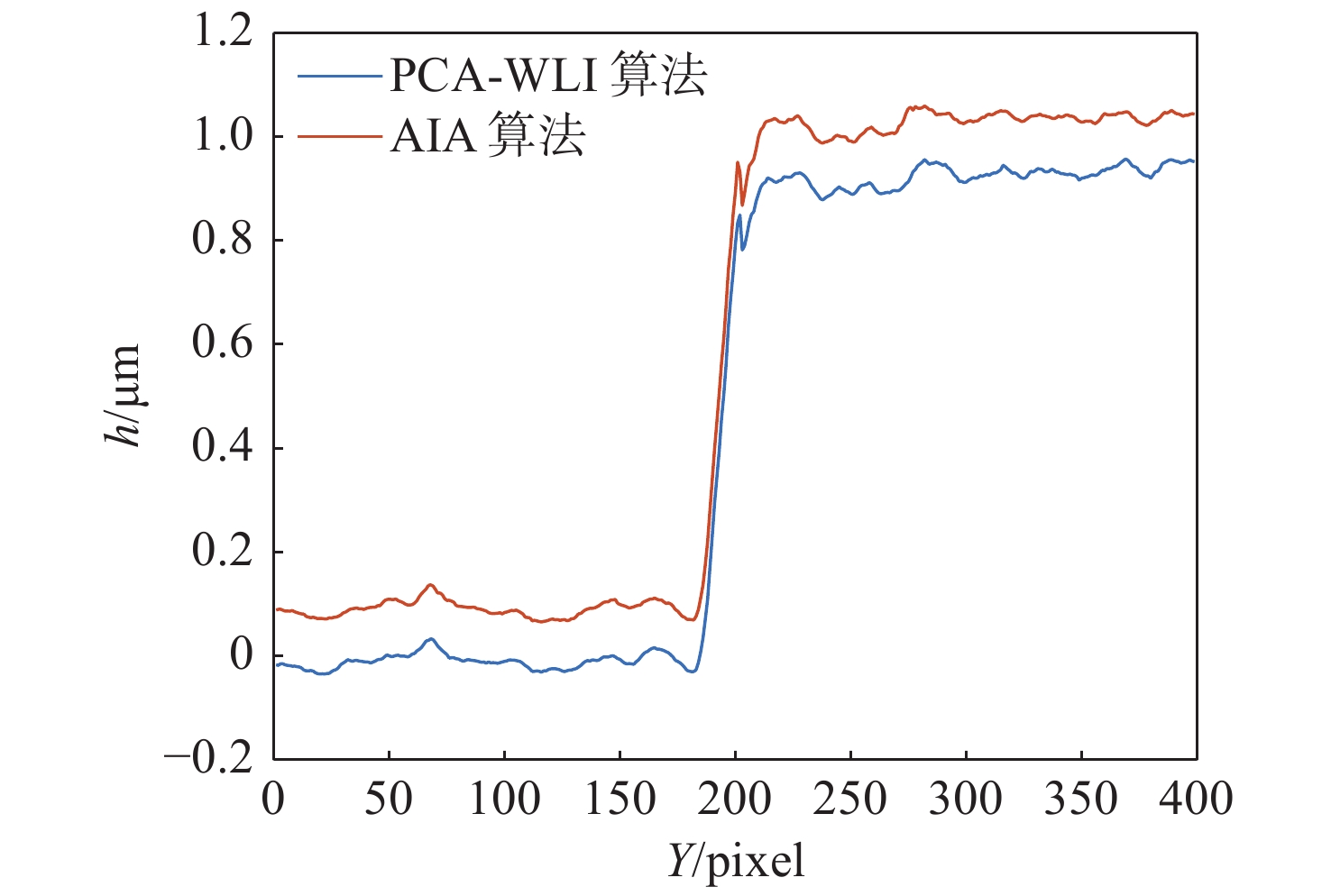
为了解决白光干涉相位求解问题,实现微观形貌的高度测量,提出了基于主成分分析(Principal Component Analysis,PCA)的白光干涉(White Light Interferometry,WLI)微观形貌测量算法。通过搭建的白光干涉显微系统采集多幅干涉图,将其重构成向量形式。在一组干涉图中,用时间平均值来估计背景照明,消除背景光成分。然后,通过矩阵运算得到代表原始数据的特征值及其特征向量。最后,通过反正切函数计算物体的包裹相位分布。实验结果表明,本文所提方法对于标定高度为956.05 nm的台阶测量结果为953.66 nm,且可以获得与迭代算法近似的解,而本文所提方法与迭代算法相比,处理速度提高了2个数量级。利用本文方法分析了表面粗糙度为0.025 µm样块的干涉条纹。结果显示:计算得到的表面粗糙度均值为24.83 nm,标准差为0.3831 nm。本文提出的方法解决了单色光干涉测量中的不足,还具有计算简单、速度快及精度高等优势。





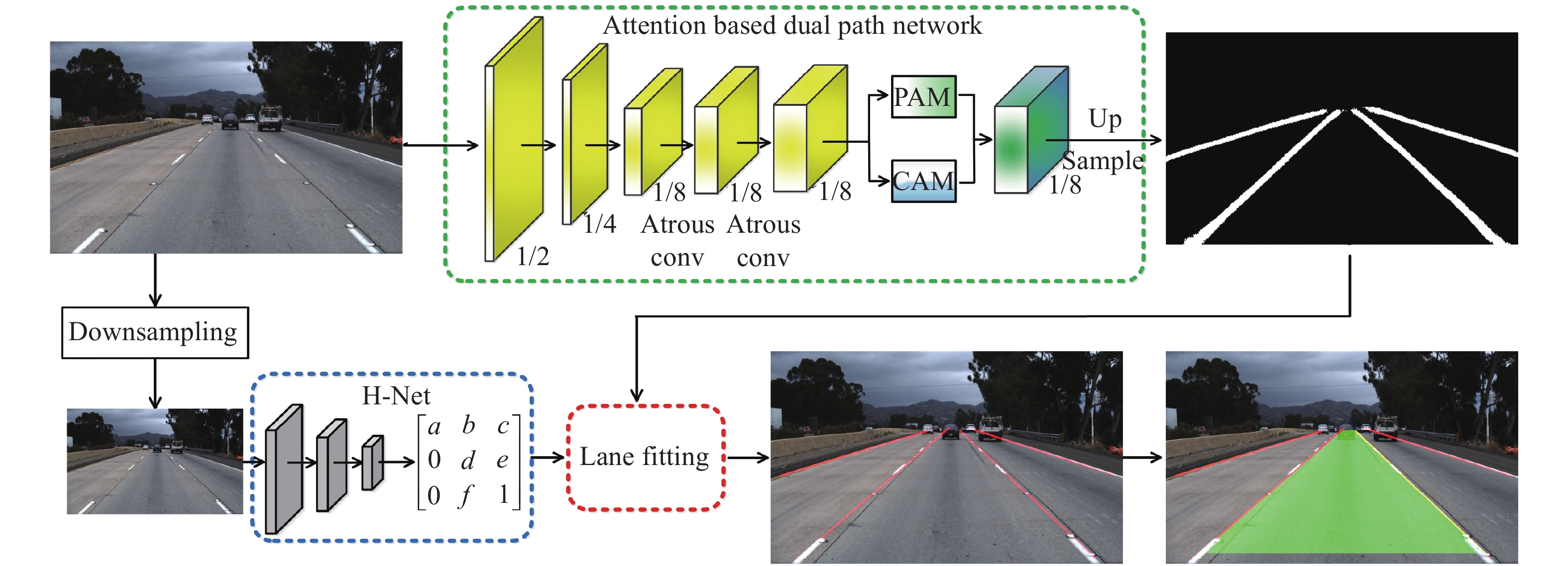
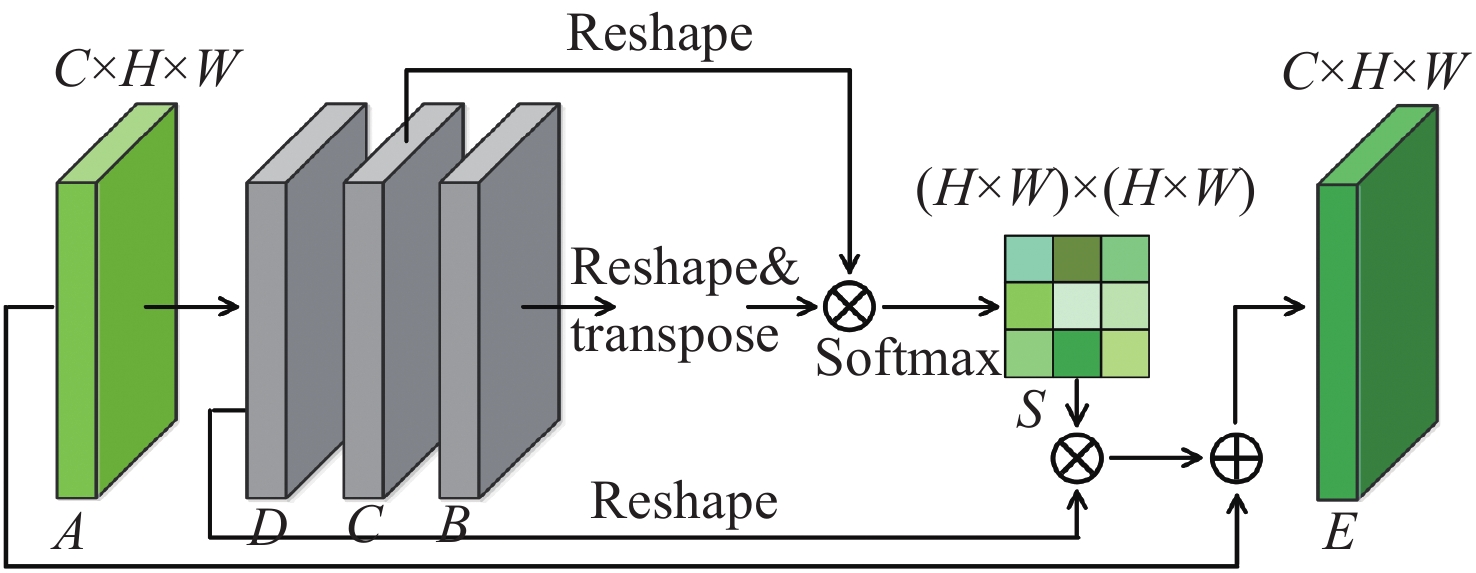
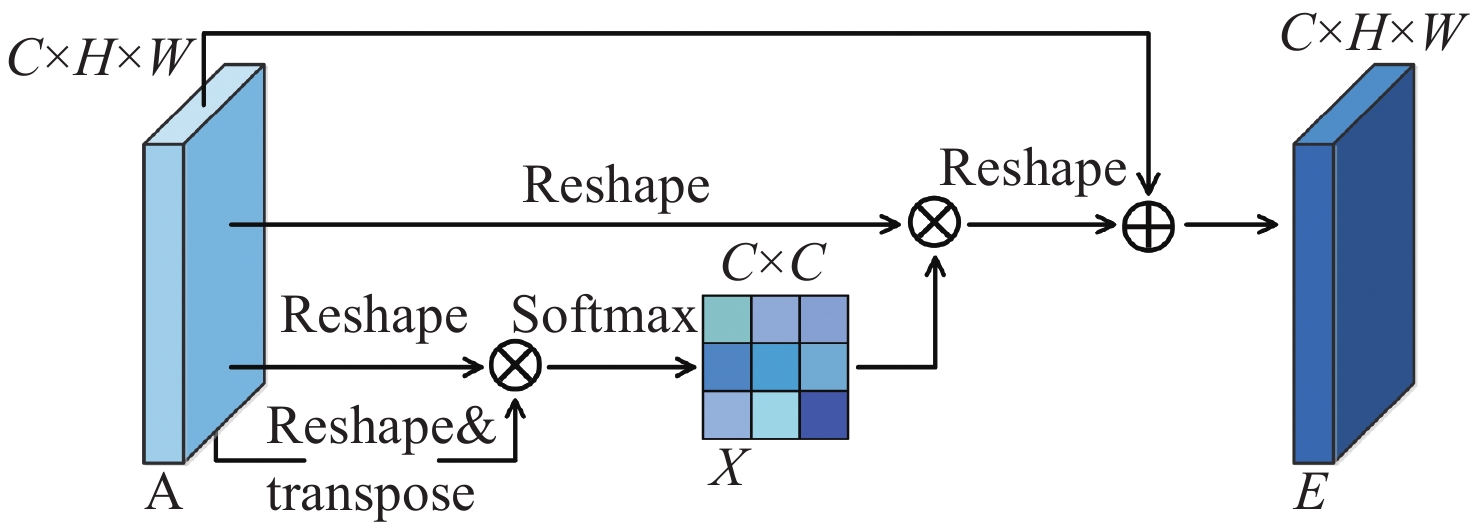
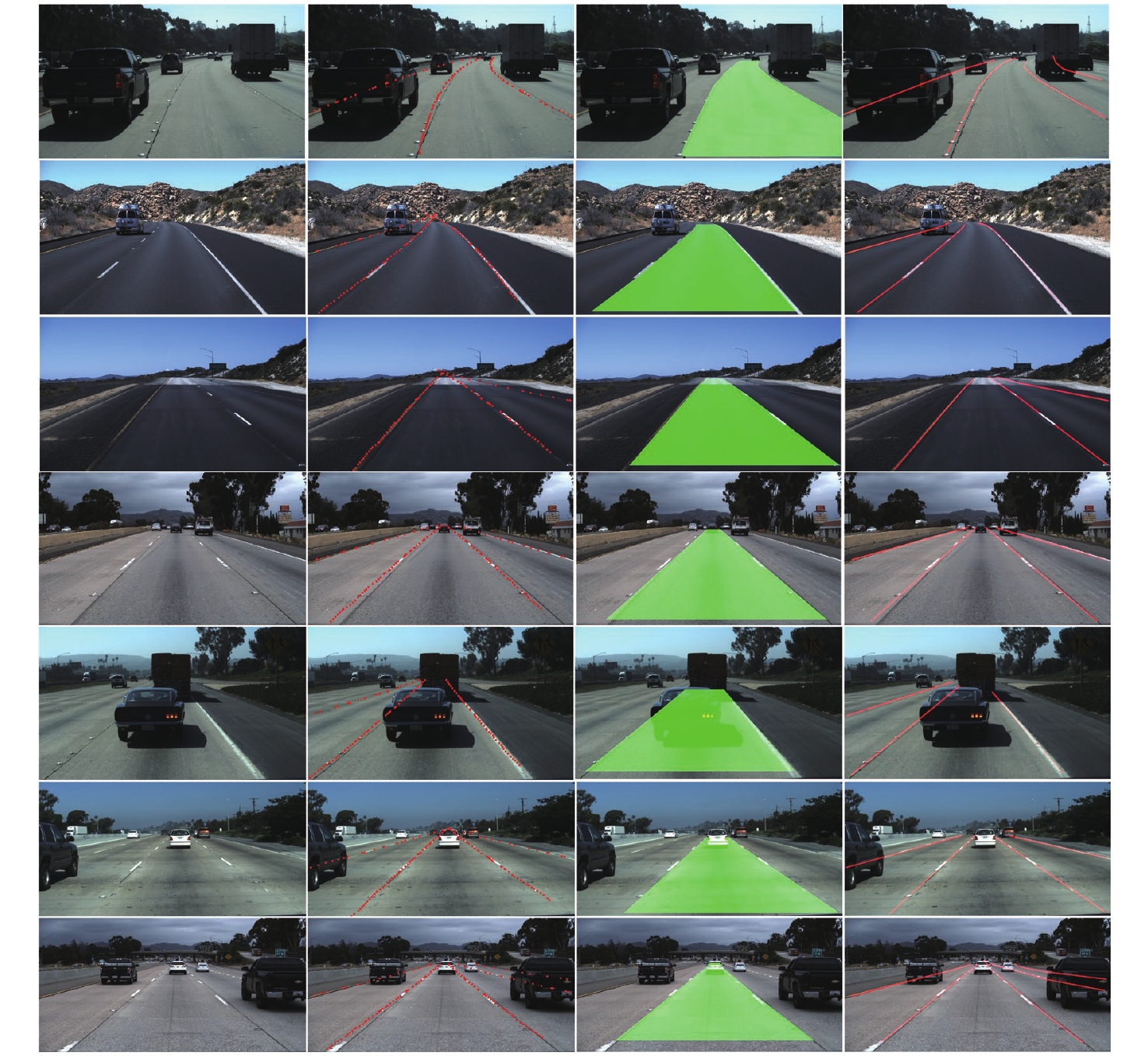
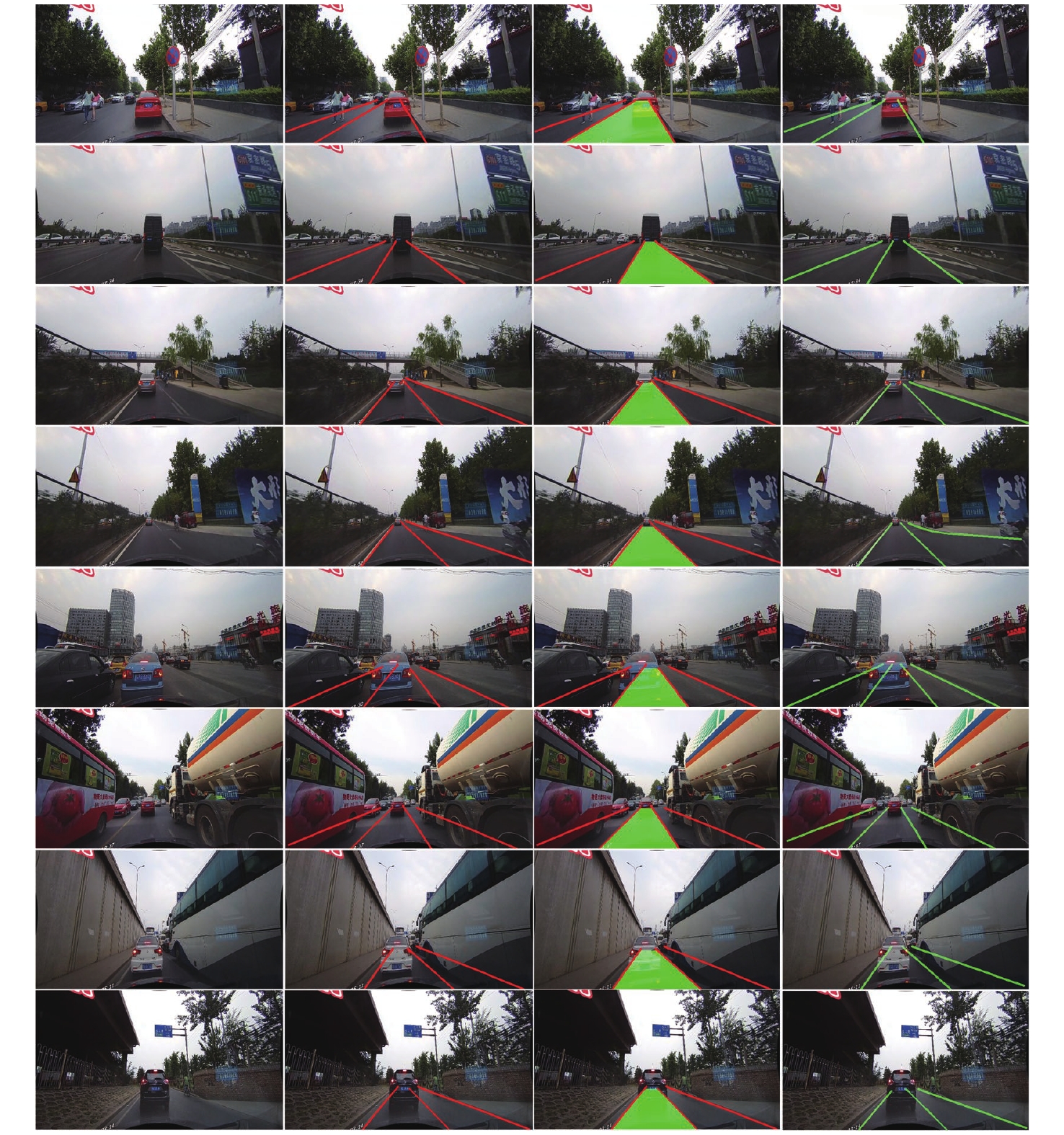
为了提升车道线检测算法在障碍物遮挡等复杂情况下的检测性能,本文提出了一种基于双注意力机制的多车道线检测算法。首先,本文通过设计基于空间和通道双注意力机制的车道线语义分割网络,得到分别代表车道线像素和背景区域的二值分割结果;然后,引入HNet网络结构,使用其输出的透视变换矩阵将分割图转换为鸟瞰视图,继而进行曲线拟合并逆变换回原图像空间,实现多车道线的检测;最后,将图像中线两侧车道线所包围的区域定义为目前行驶的行车车道。本文算法在Tusimple数据集凭借134 frame/s的实时性表现达到了96.63%的准确率,在CULane数据集取得了77.32%的精确率。实验结果表明,本文算法可以针对包括障碍物遮挡等不同场景下的多条车道线及行车车道进行实时检测,其性能相比较现有算法得到了显著的提升。


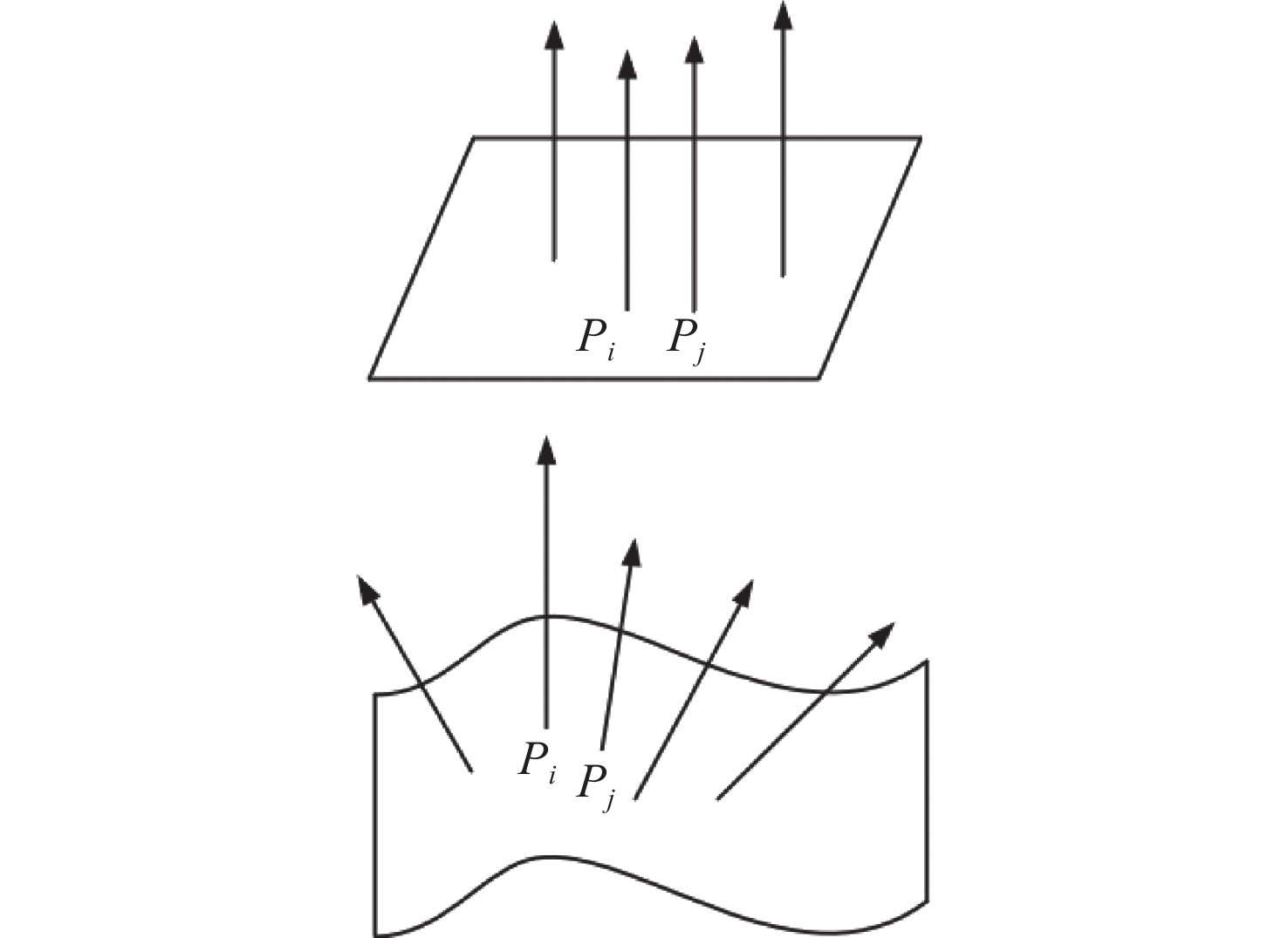
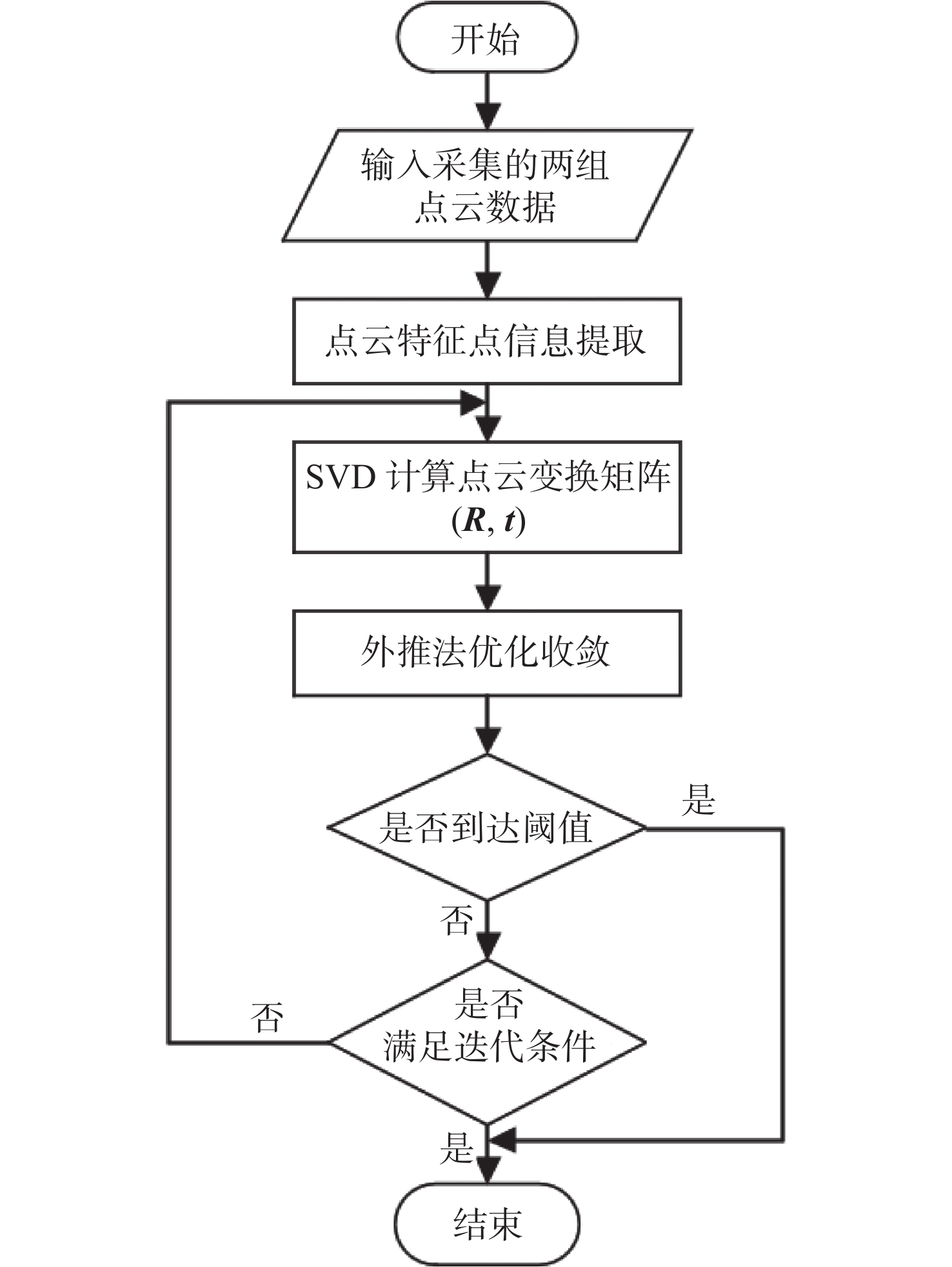
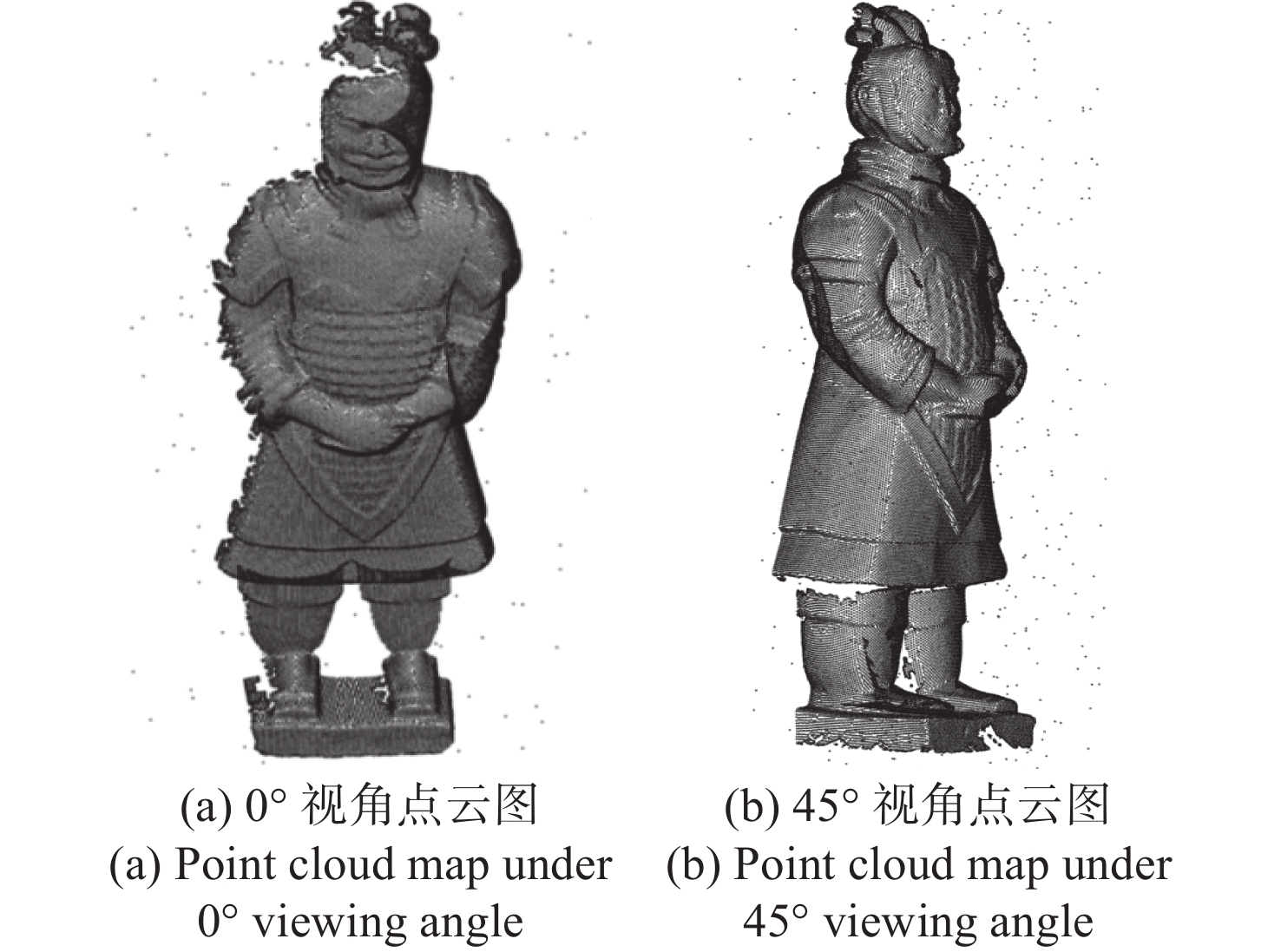
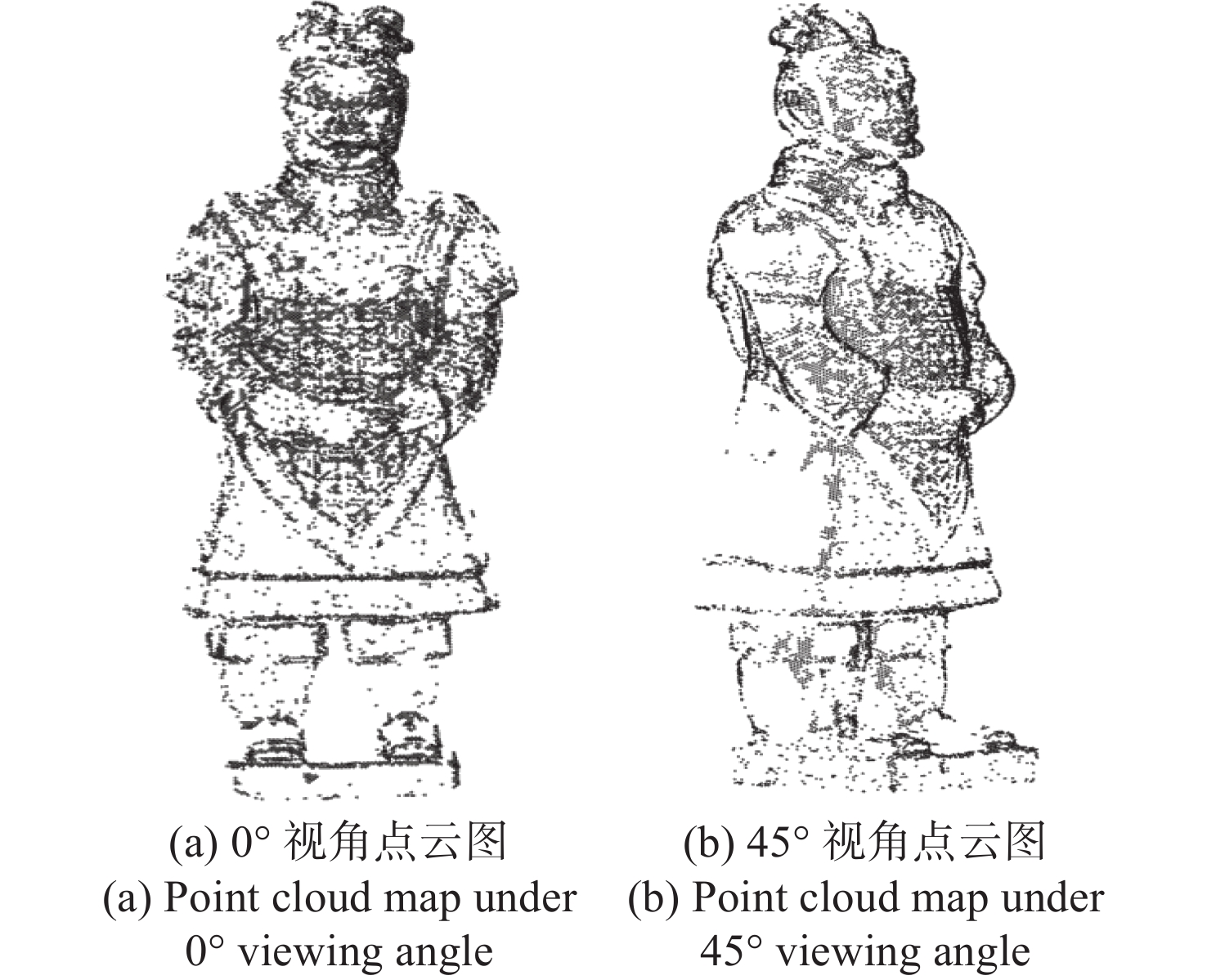
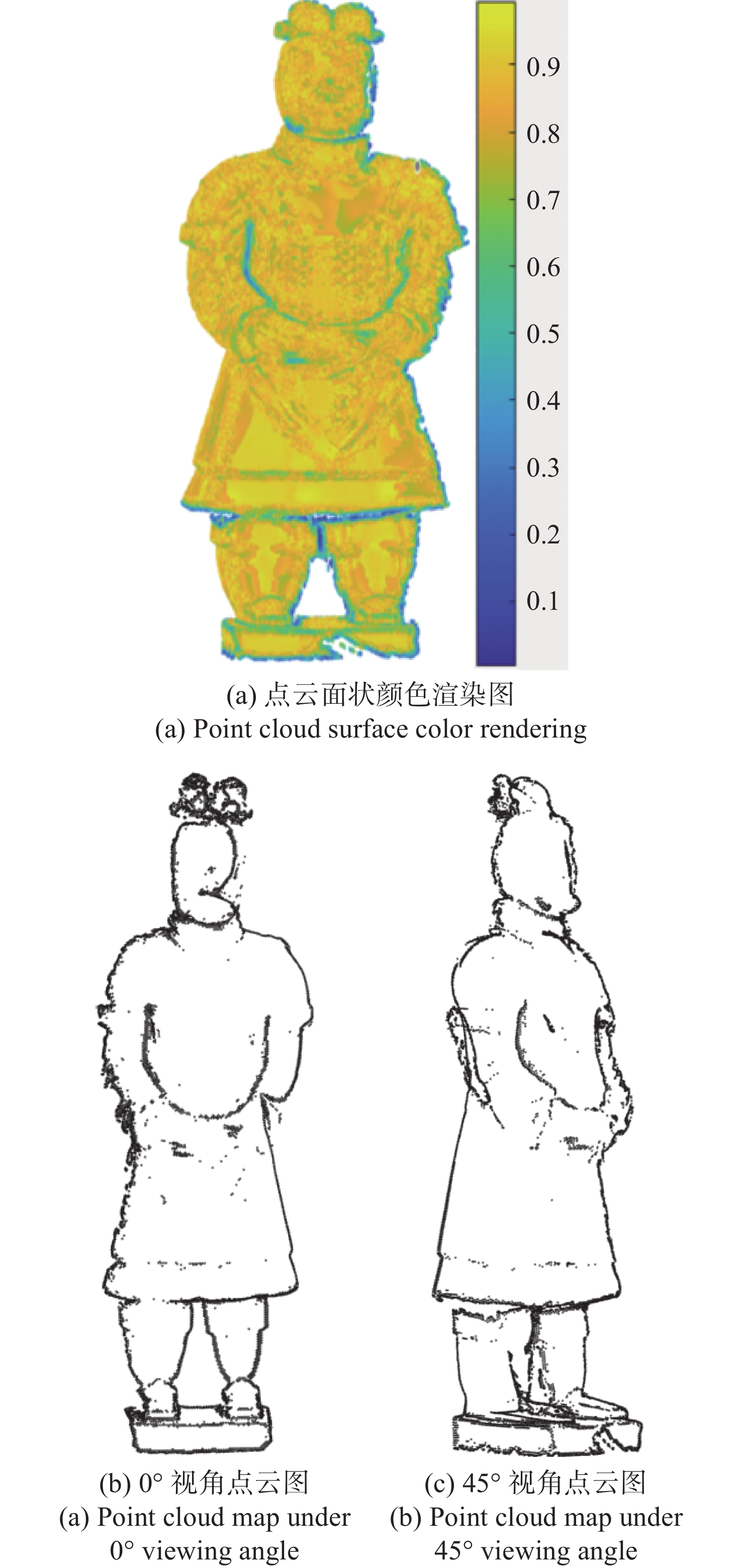
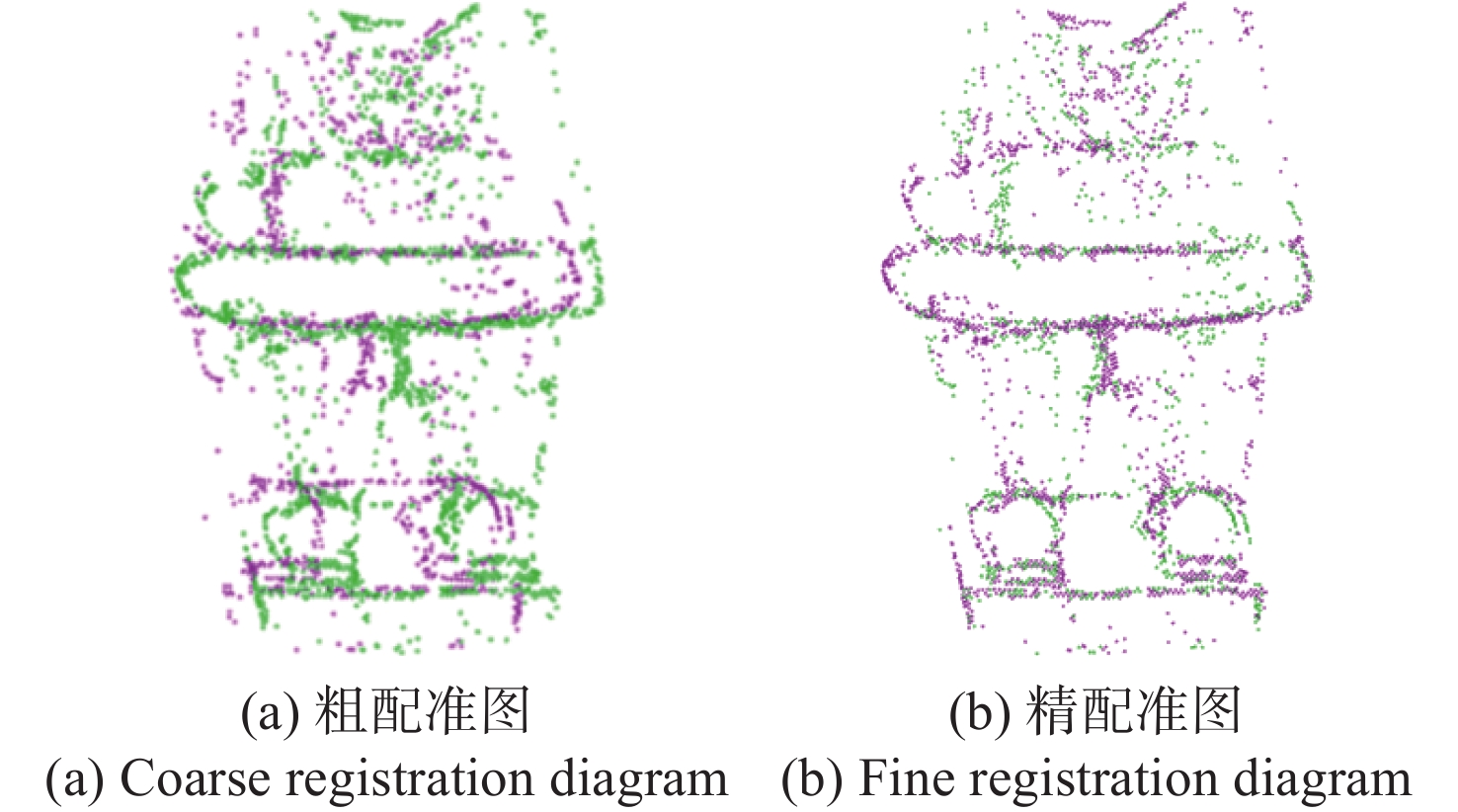
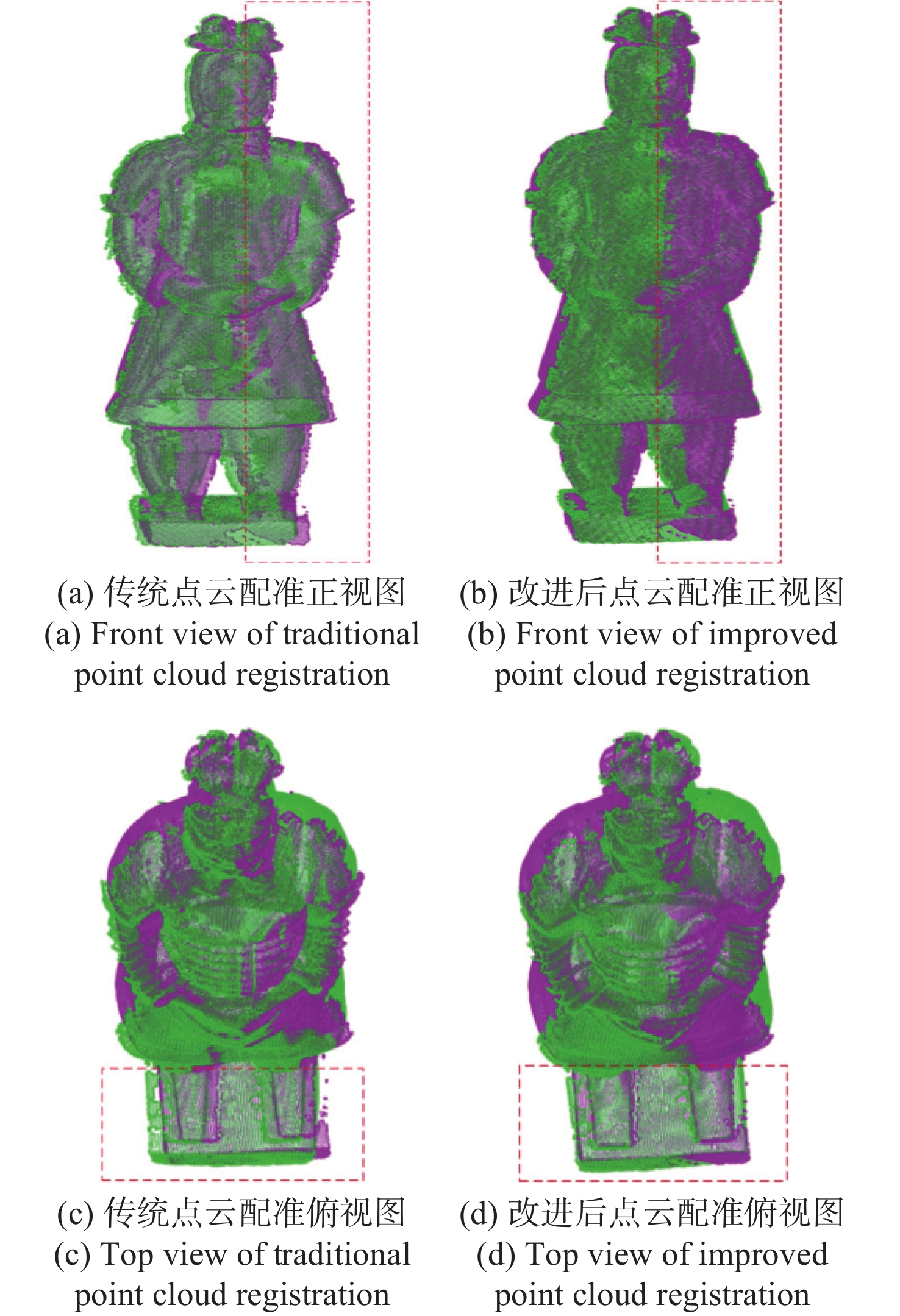
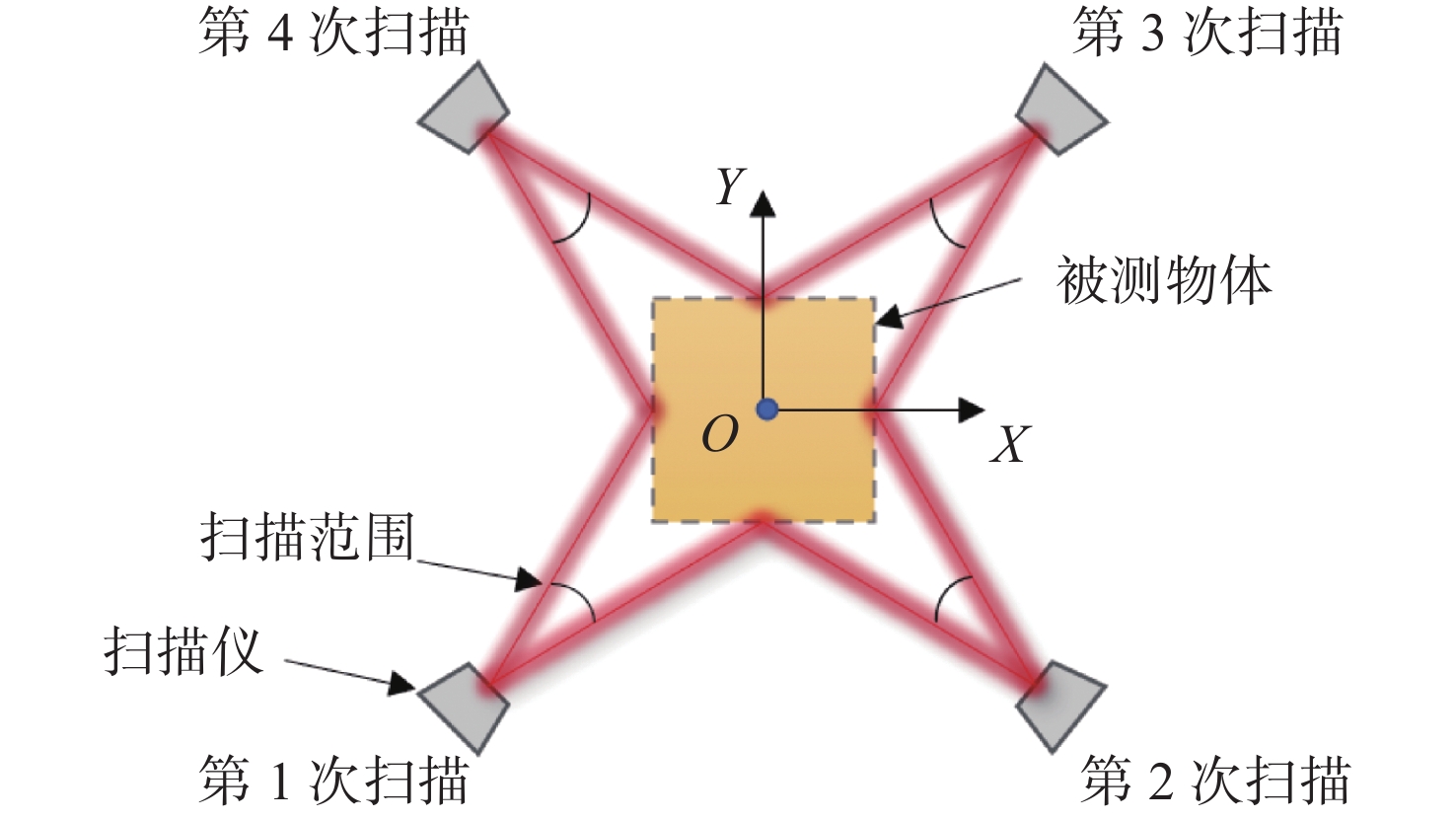
三维重建是文物信息保护常用的方法,其主要通过点云配准技术重组文物空间的点云信息,配准精度对文物复现有重要影响。针对文物表面复杂点云纹理特征配准存在精度低、鲁棒性差的问题,本文提出一种基于法向量夹角和面状指数特征的局域点云配准方法。首先,根据点云平面特性设定法向量夹角和协方差矩阵阈值,提取同时满足这两个特征的点云特征点;其次,采用K近邻搜索方法提取点云局域特征点集,通过刚性变换使两组点云质心位置重合,完成粗配准;最终,在两点云粗配准的基础上,根据迭代最近点ICP进行精配准。与传统ICP方法进行对比分析,结果显示本文方法的点云配准误差下降了3%,匹配耗时降低了50%,有效地提高了配准精度和效率,增强了点云配准的鲁棒性。

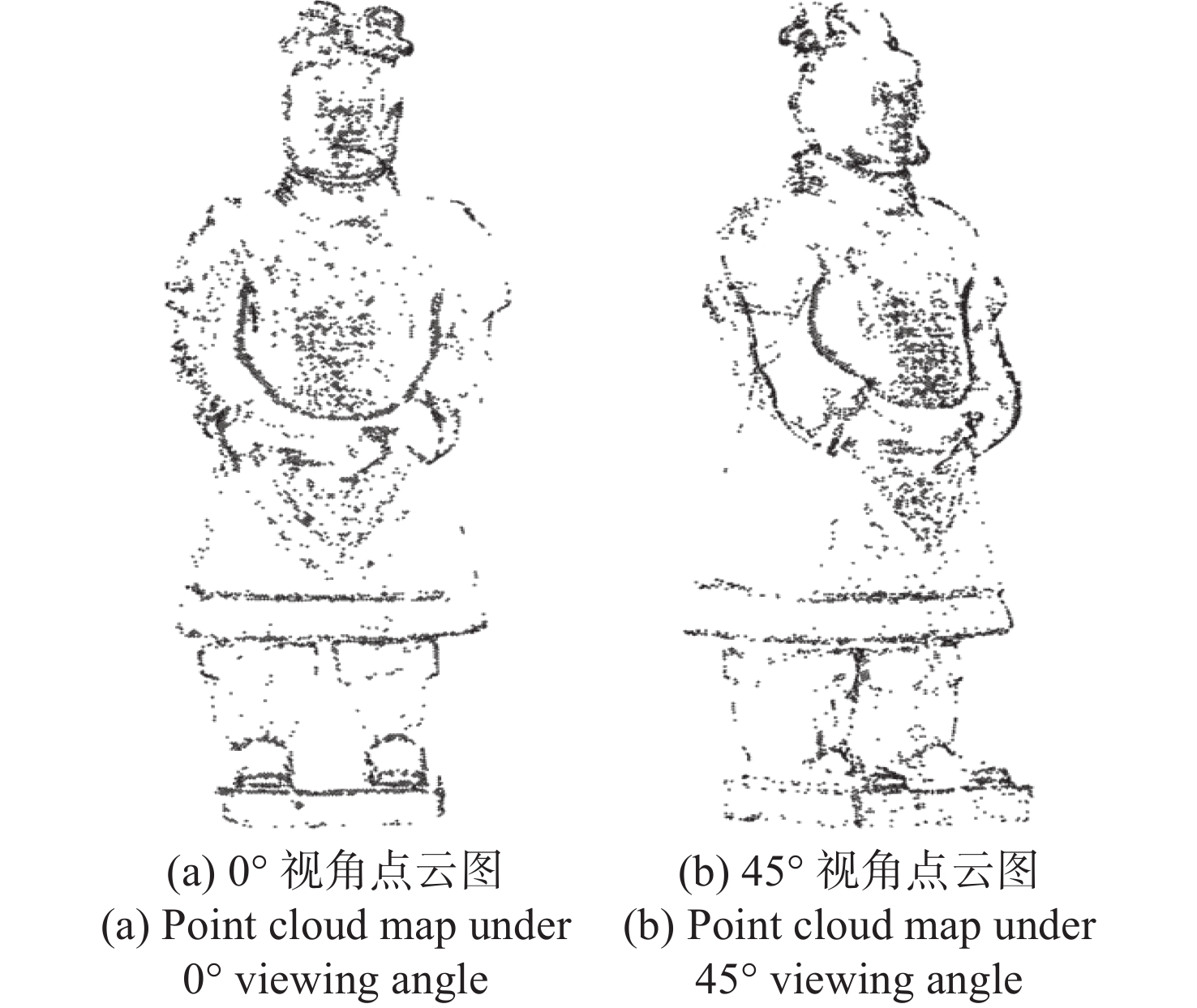

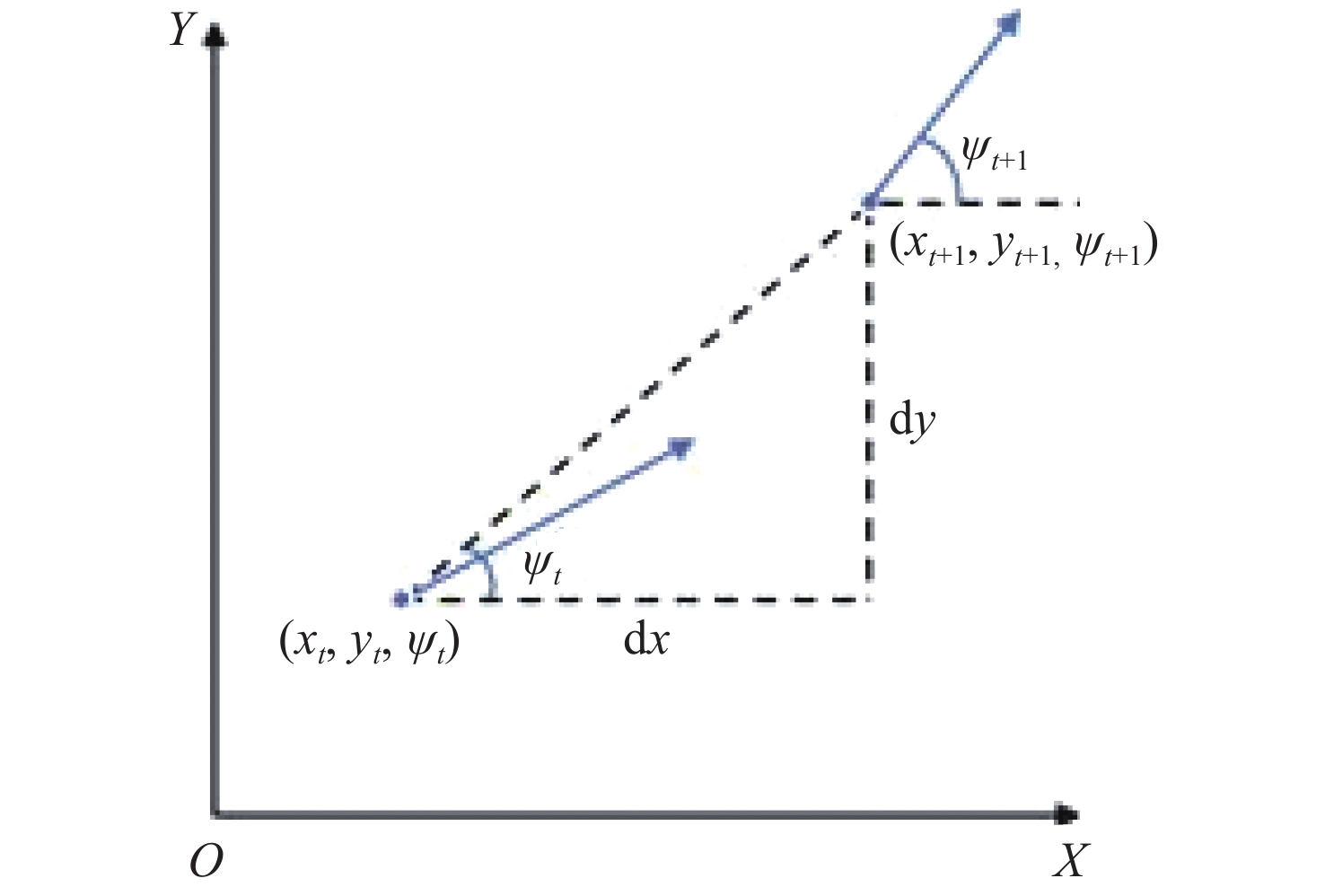
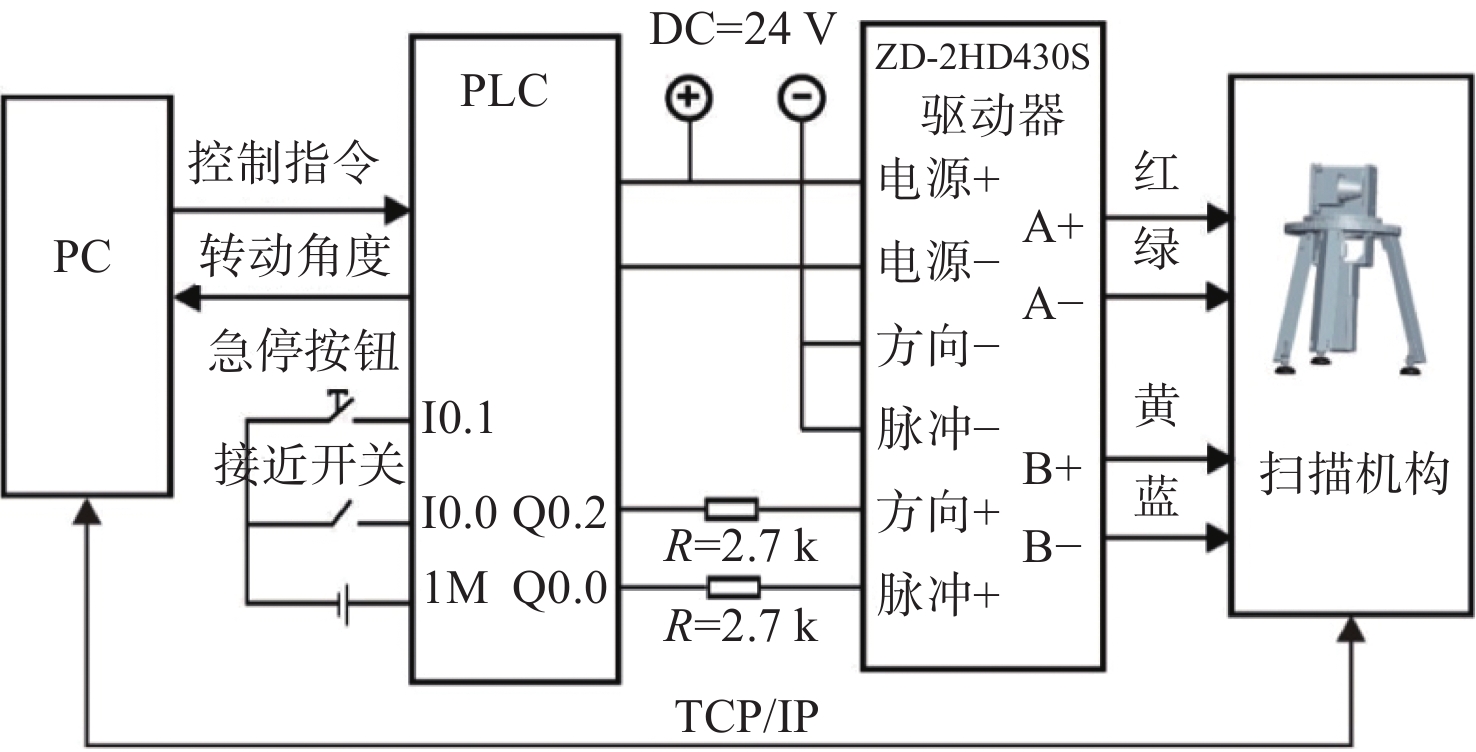
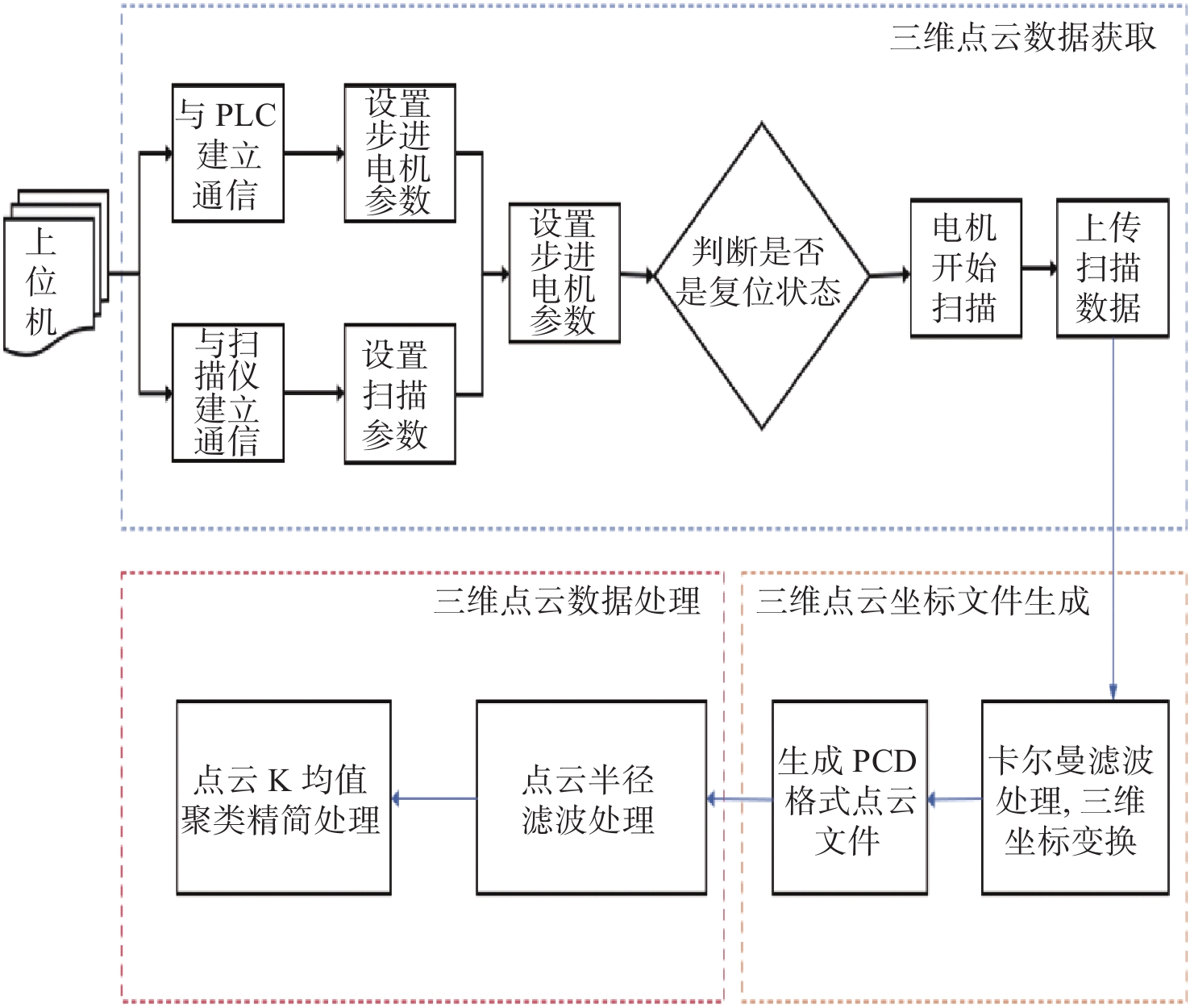
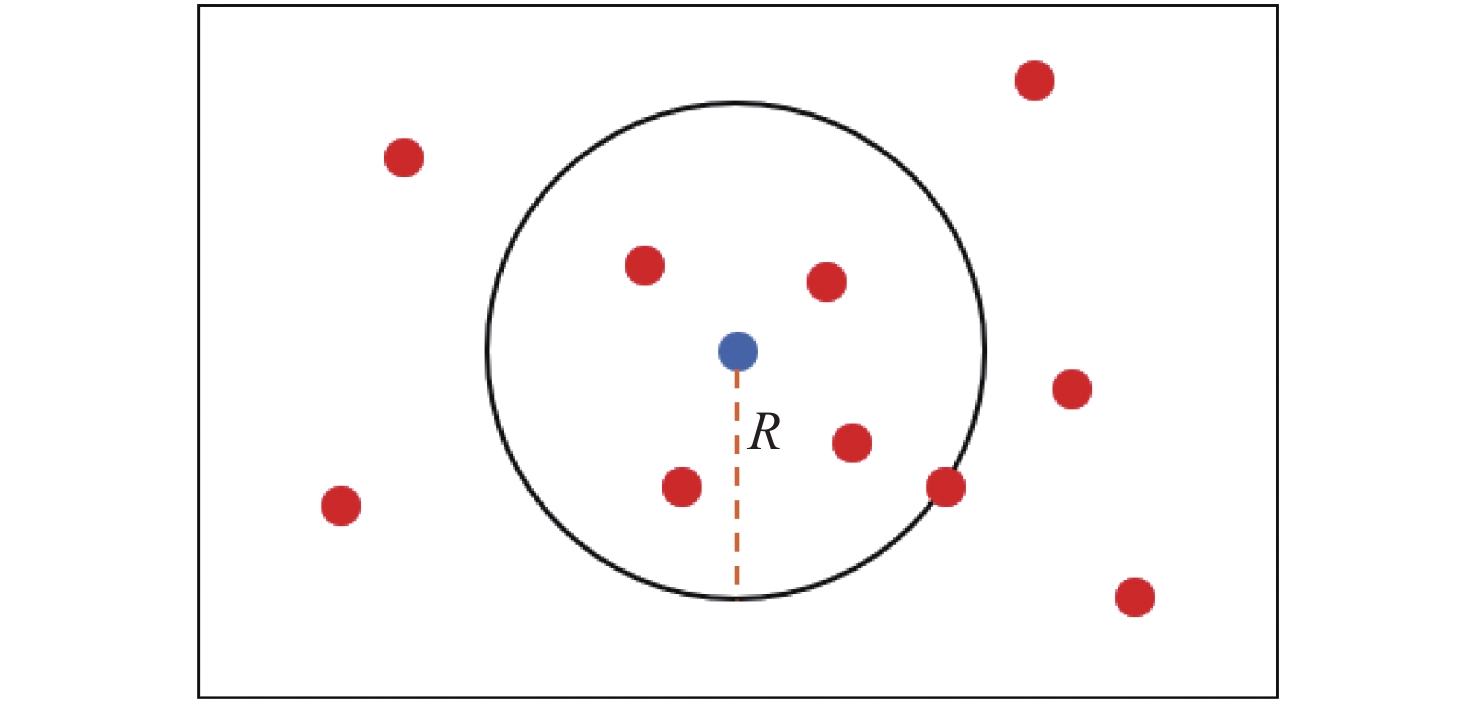
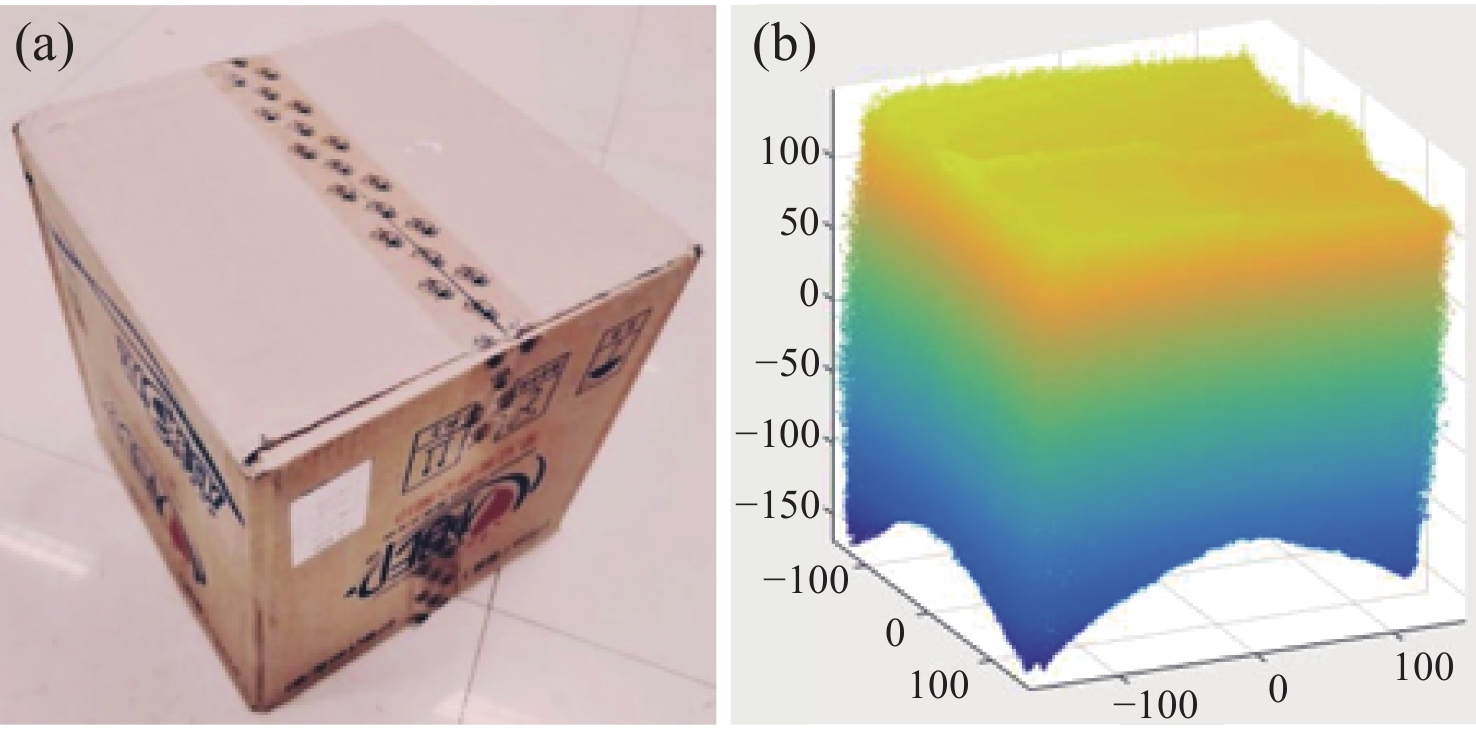
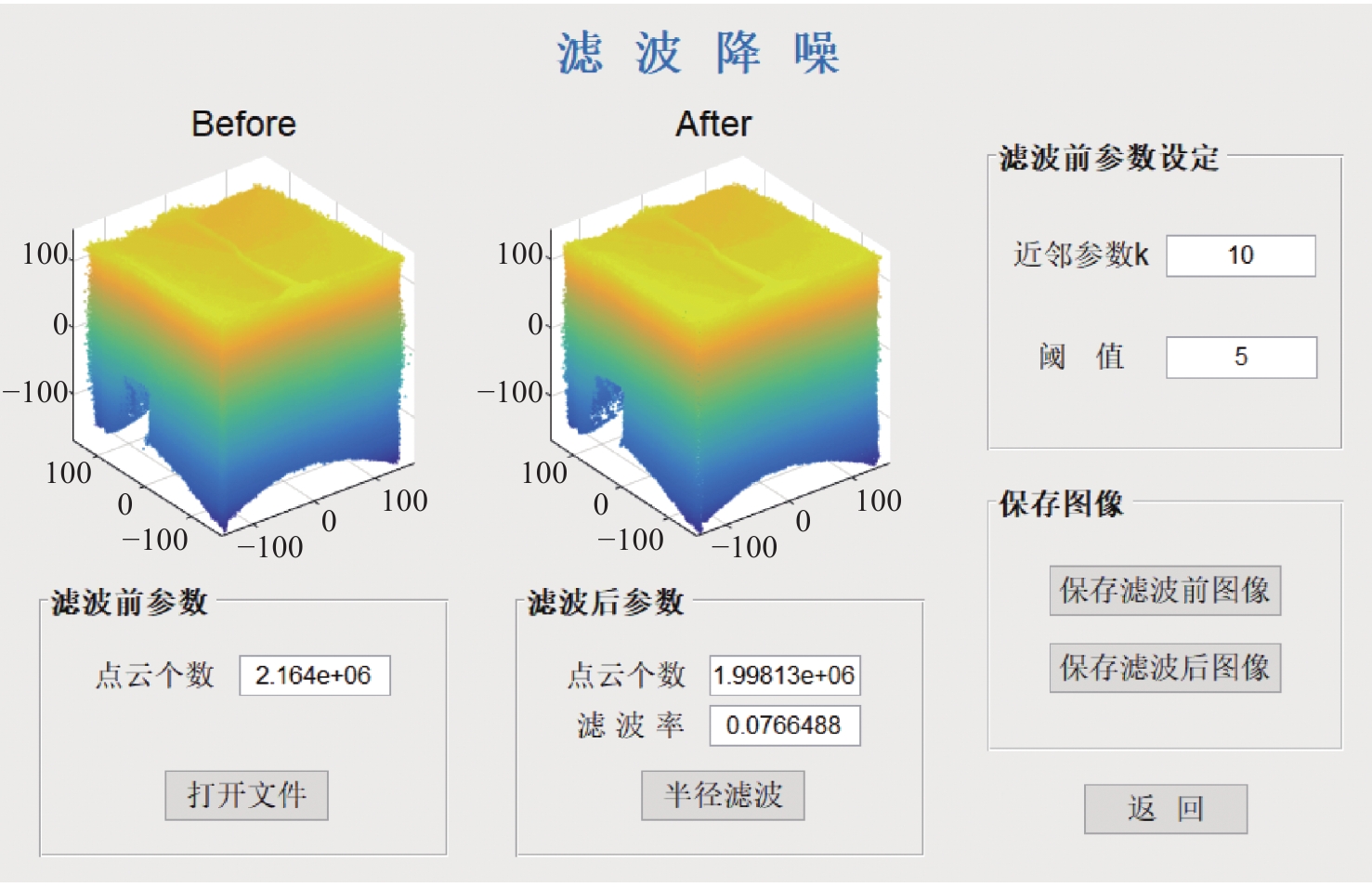
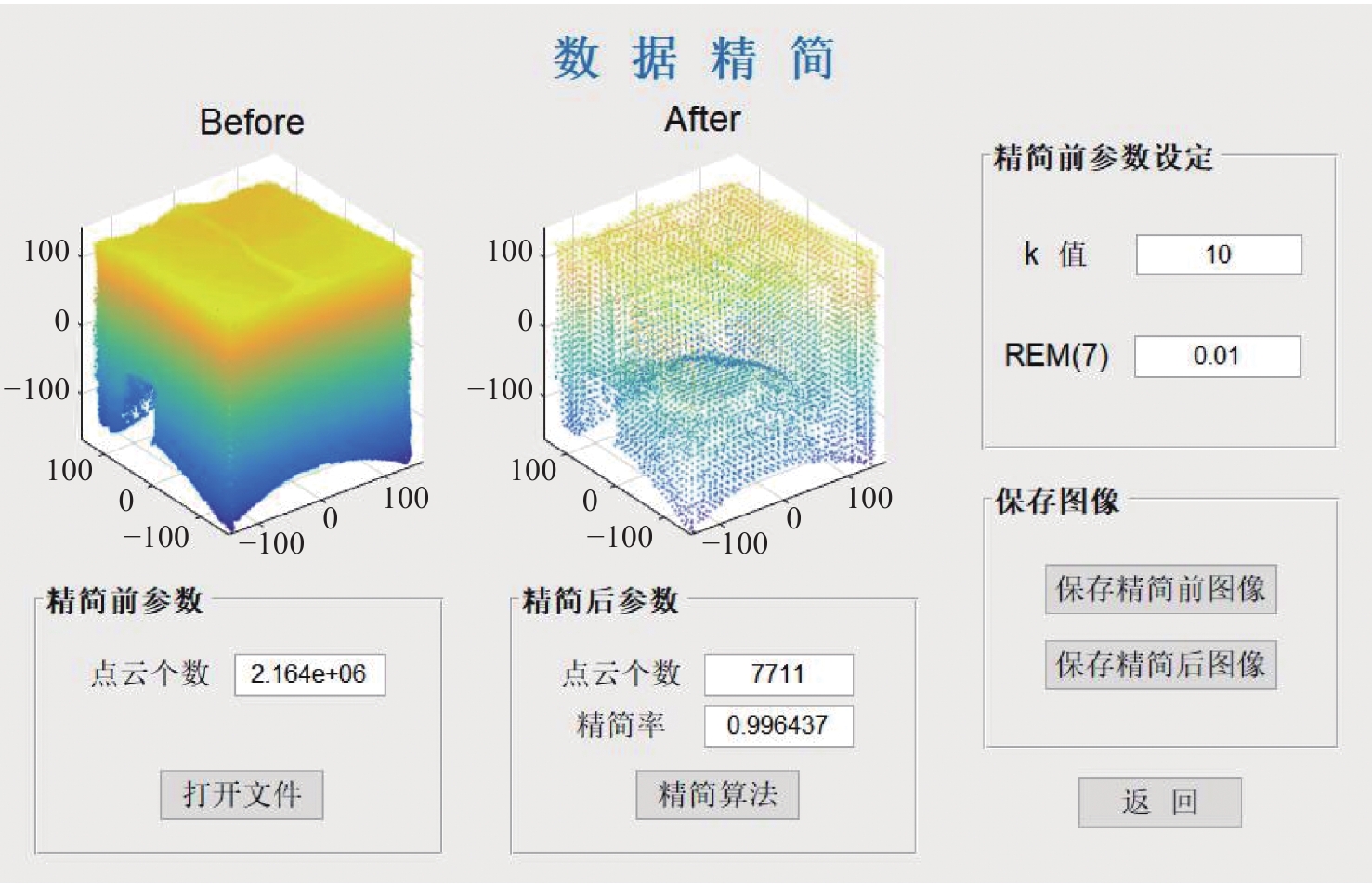
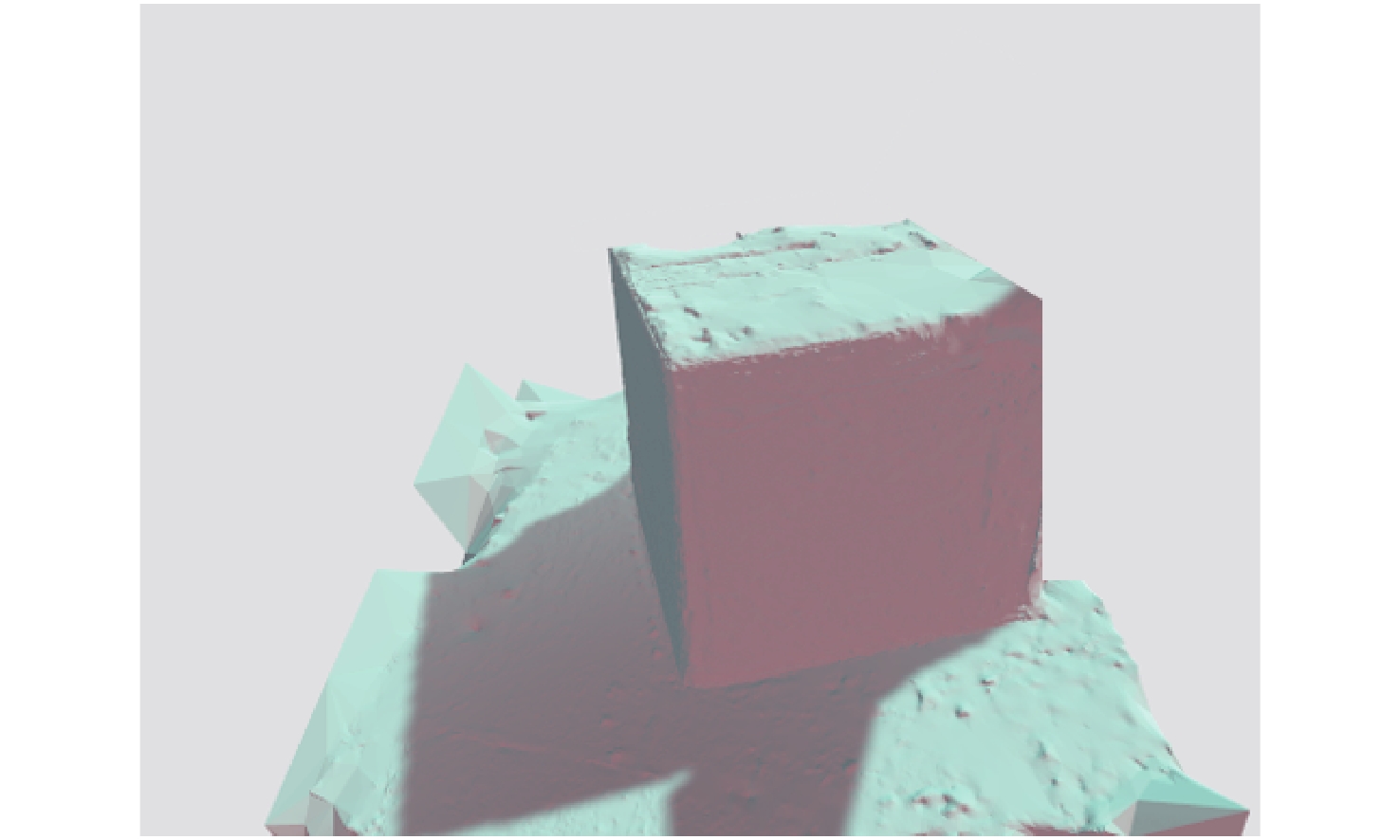
三维重建技术是机器视觉中最热门的研究方向之一,在无人驾驶和数字化加工与生产等领域得到了广泛的应用。传统的三维重建方法包括深度相机和多线激光扫描仪,但是通过深度相机获得的点云存在着信息不完整和不精确的问题,而多线激光扫描仪成本高,阻碍了该项技术的应用和研究。为解决上述问题,提出了一种基于转动式二维激光扫描仪的三维重建方法。首先,用步进电机带动二维激光扫描仪旋转运动来获取三维点云数据。然后,用多传感器融合的方法对激光扫描仪的位置进行标定,采用坐标系变换完成点云数据的匹配。最后,对采集得到的点云数据进行了滤波和精简处理。实验结果表明:相较于深度相机/IMU数据融合的重建方法,平均误差降低了0.93 mm,为4.24 mm;精度达到了毫米级别,误差率也控制在了2%以内;整套设备的成本相较于多线激光扫描仪大大降低。本文方法基本满足保留物体的外形特征、高精度和成本低的要求。





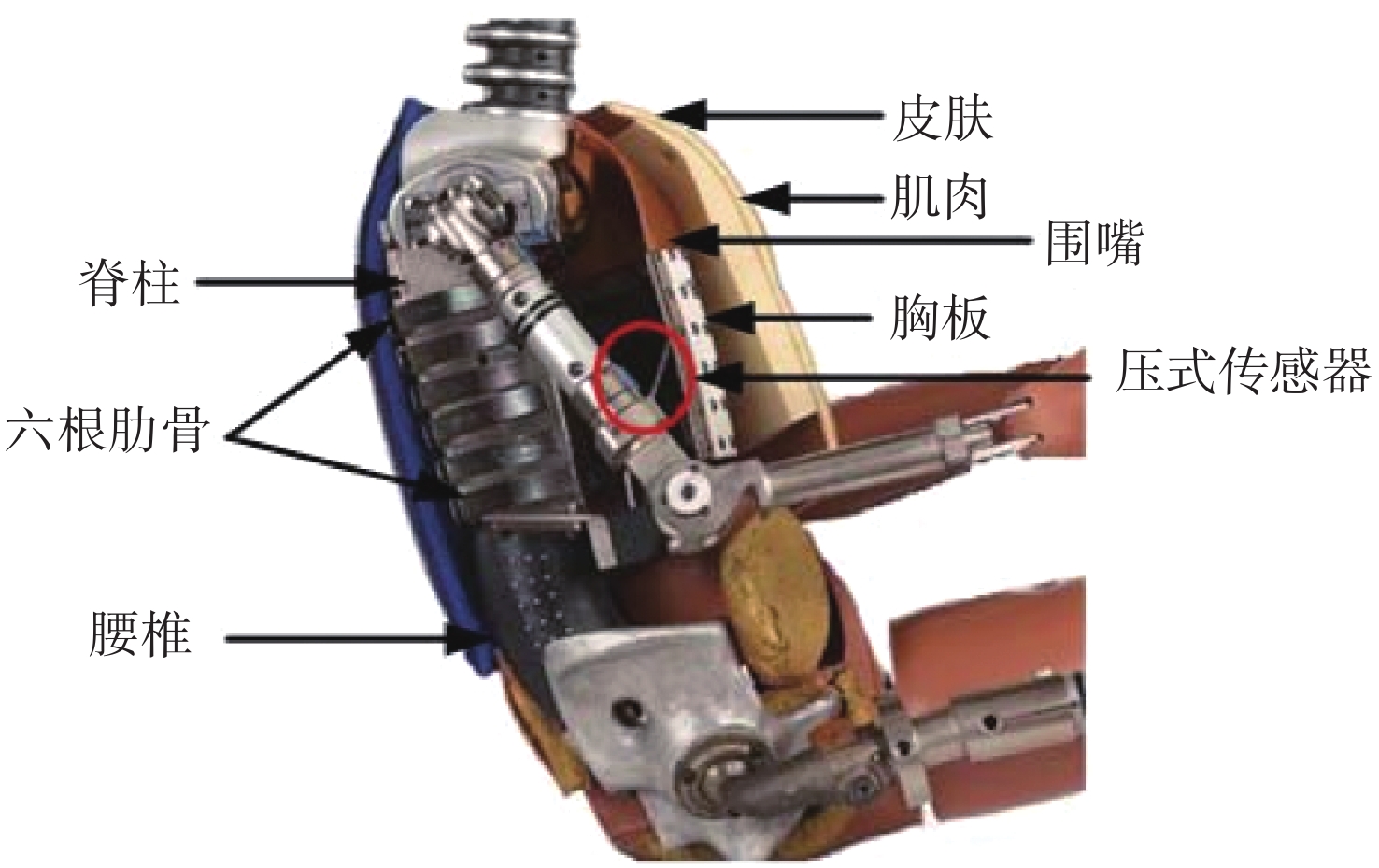
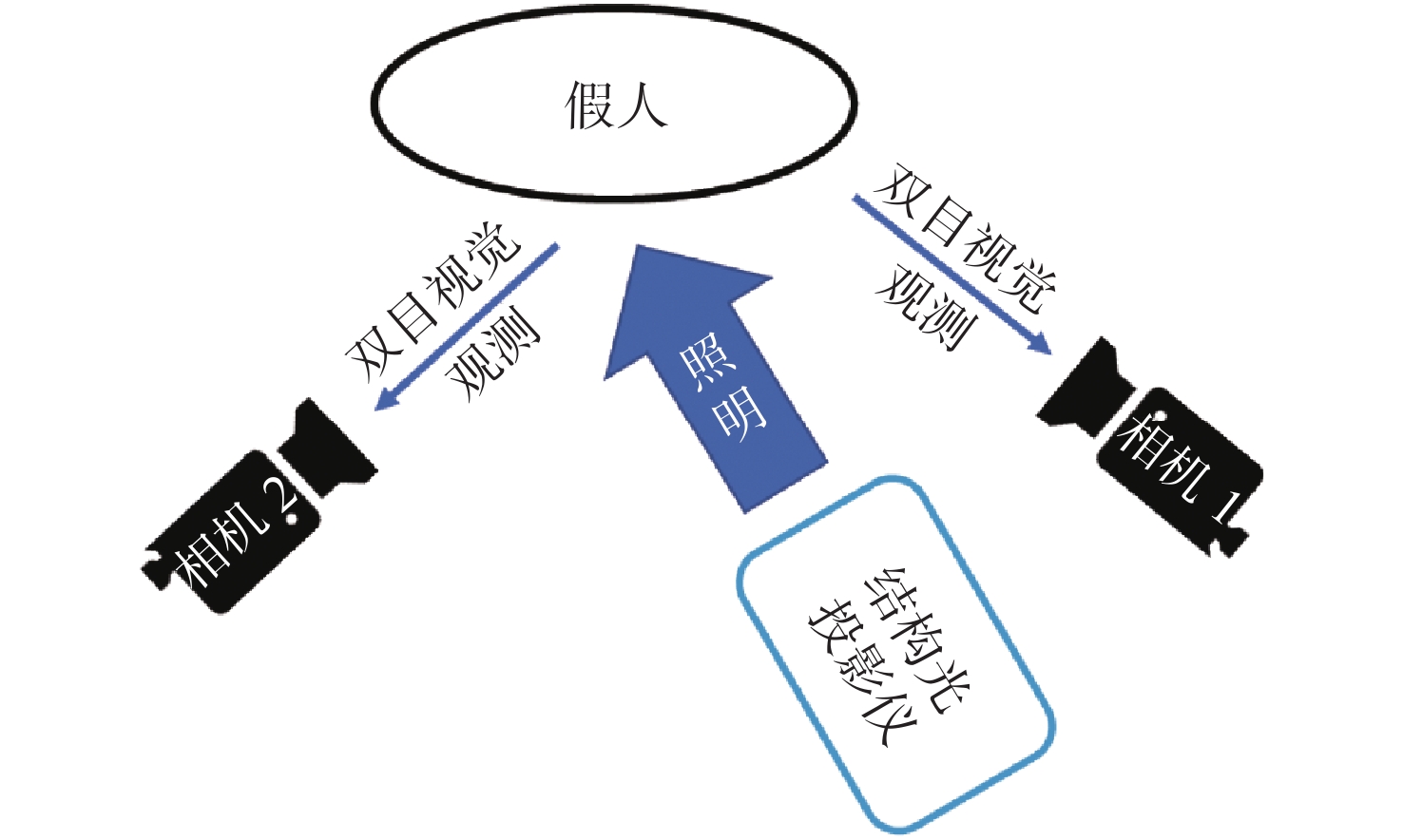
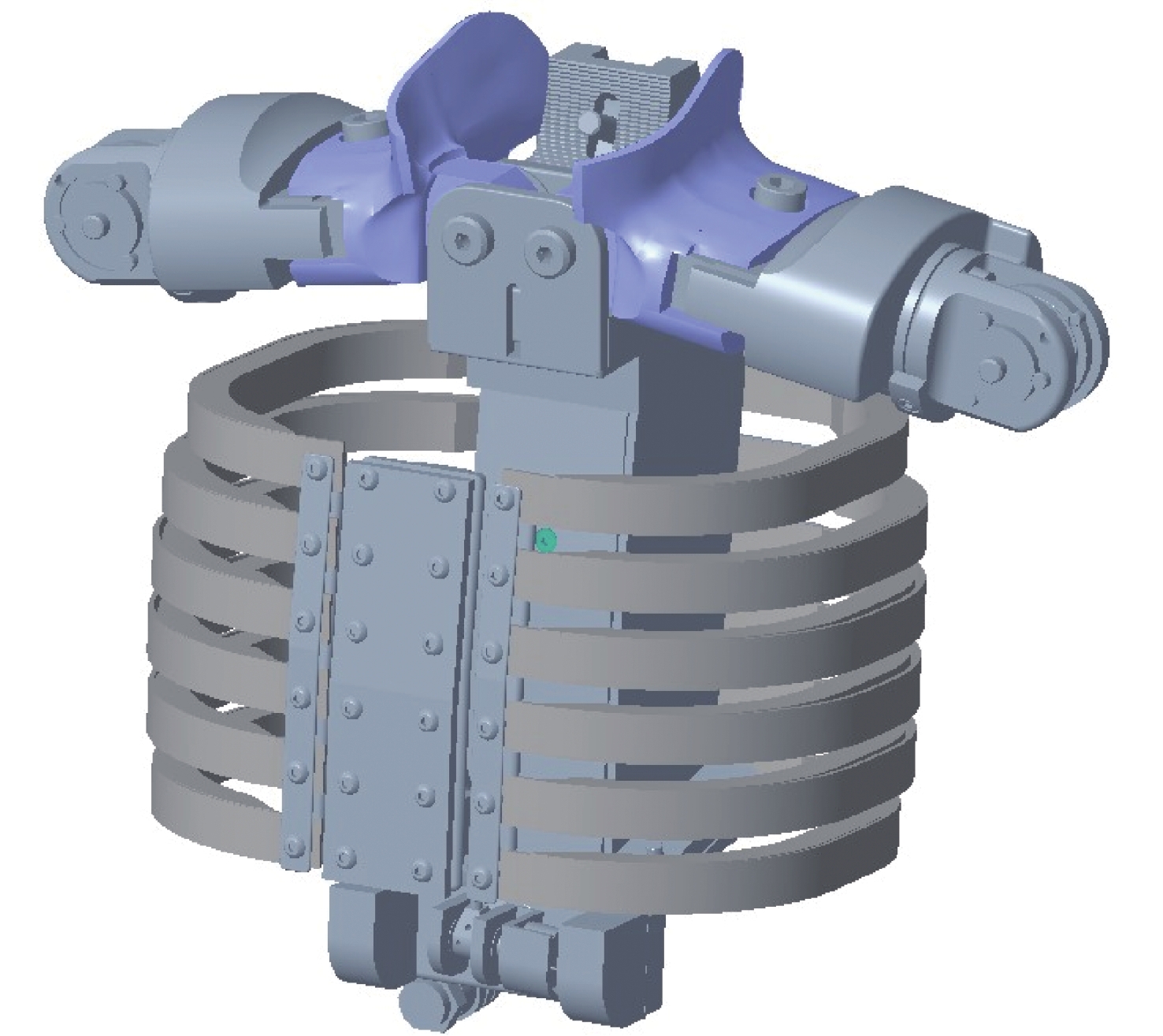
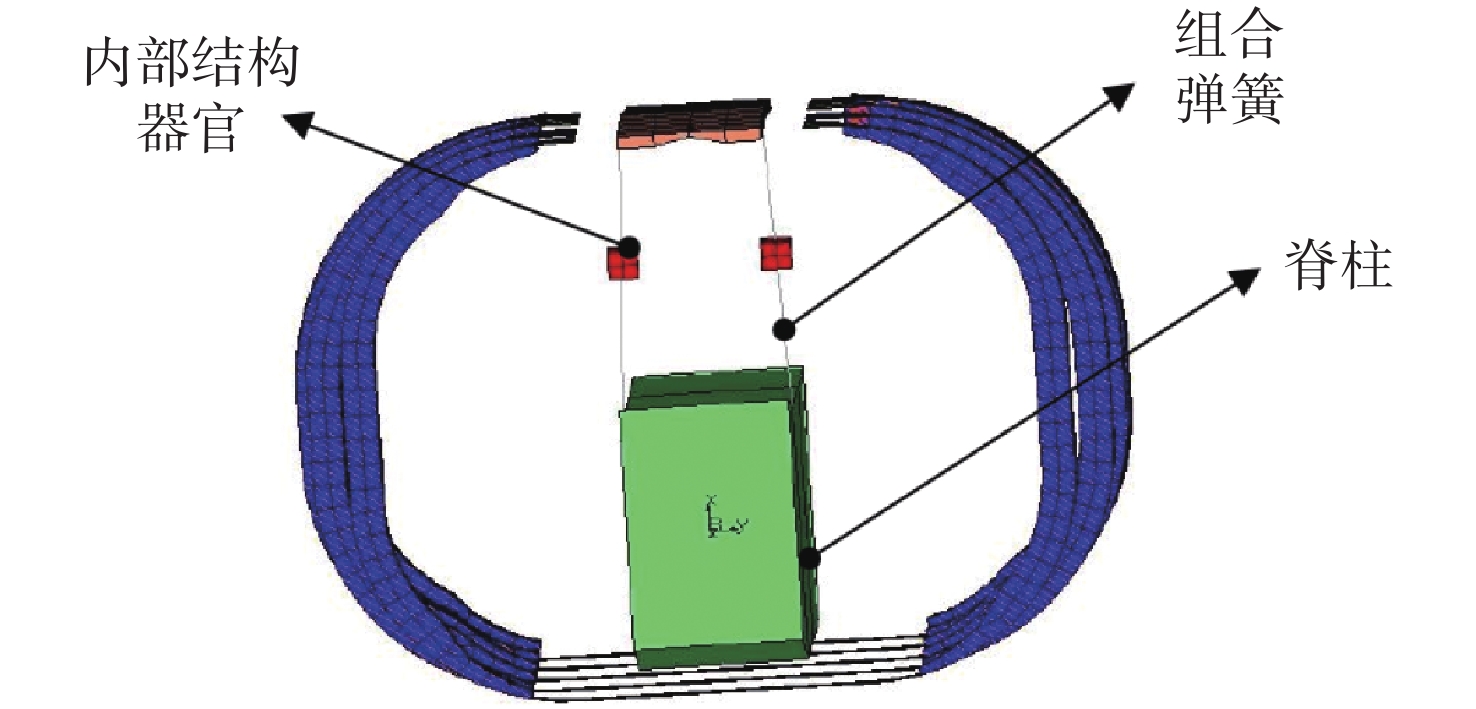
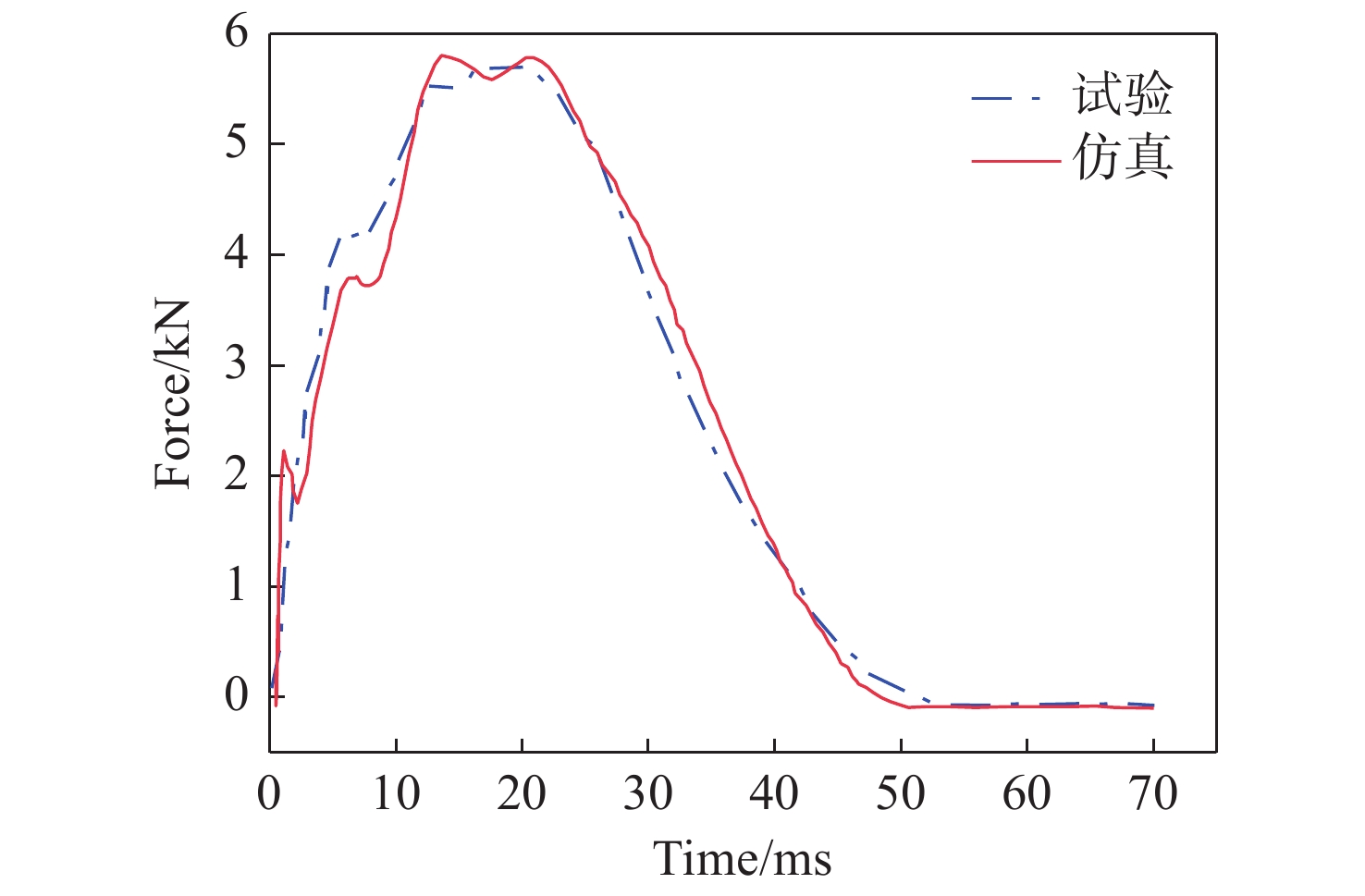
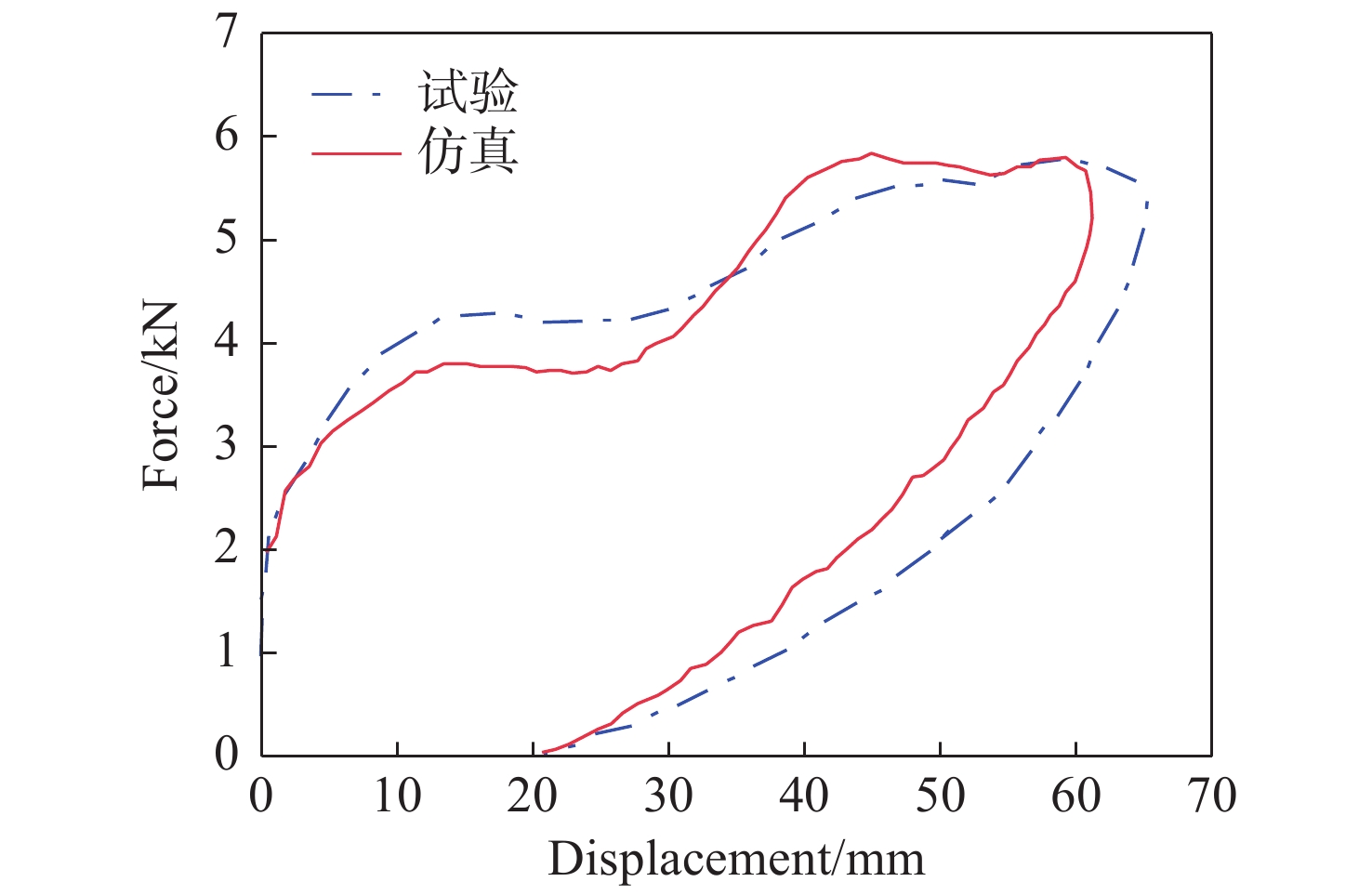
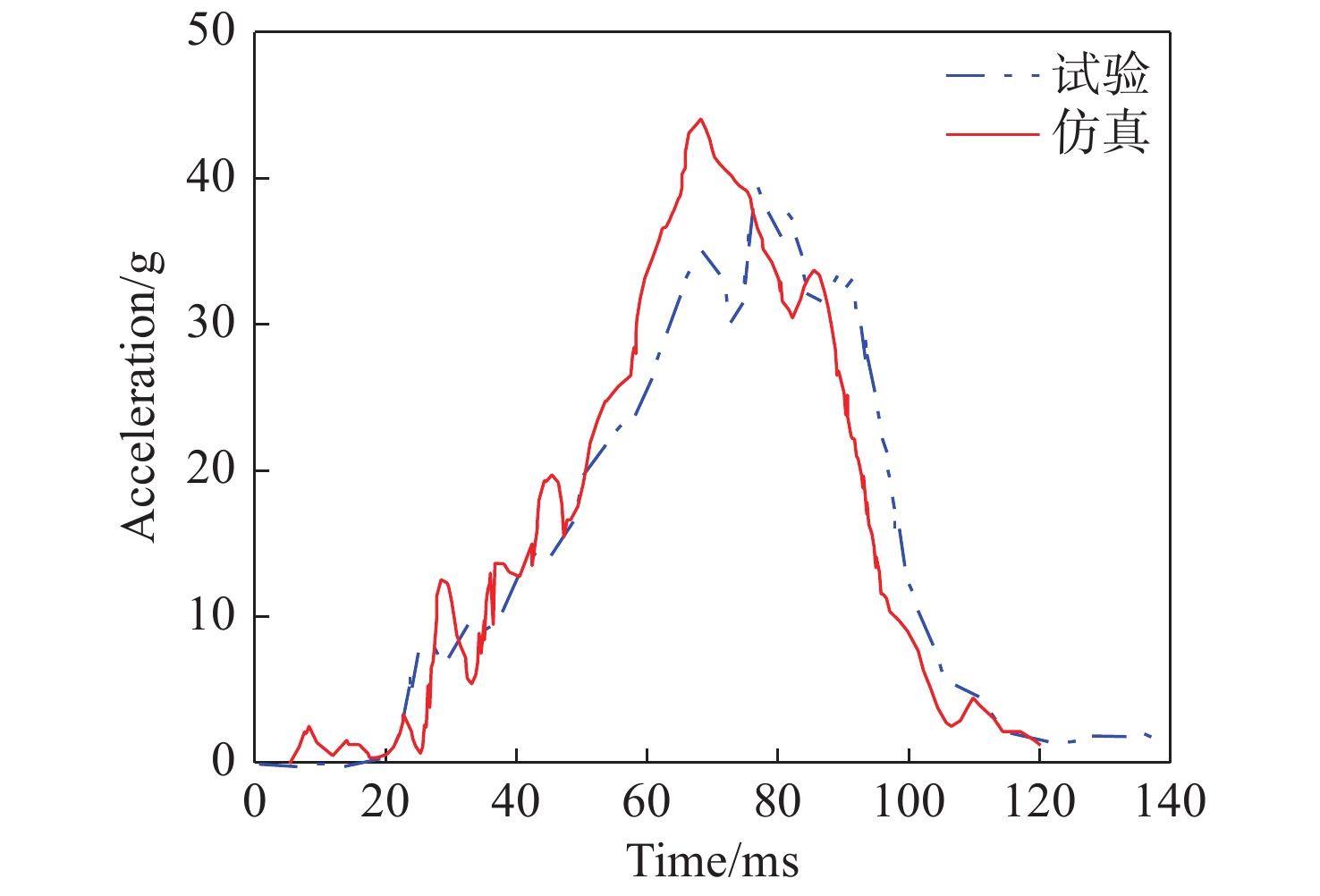
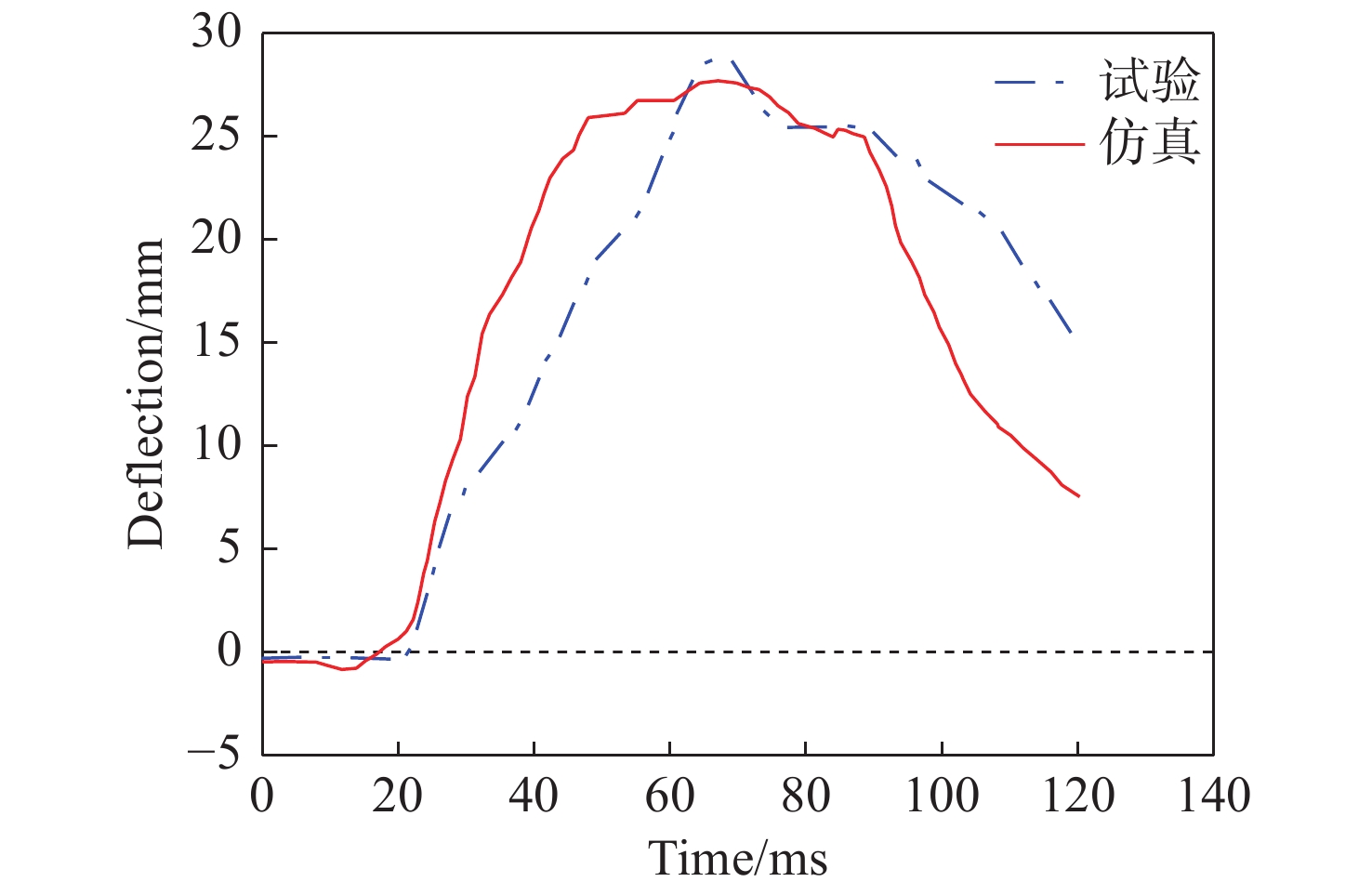
在汽车被动安全领域,对于驾驶员正碰撞击中胸部的研究具有重要的意义。本文基于机器视觉的方法,通过Hybrid Ⅲ 50th汽车碰撞实体假人,构建假人胸部模型。利用遗传算法进行参数优化,优化后标定试验的所有指标均符合法规要求,仿真结果与试验测试结果相符,误差小于5%。随后将含有胸部模型的有限元假人模型放入整车系统进行正碰仿真分析,结果表明:胸部伤害得分值为80%,与试验测试结果相比,仿真结果误差不超过10%。实验结果表明该模型有较好的仿真度,可用于汽车碰撞安全性能的研究。





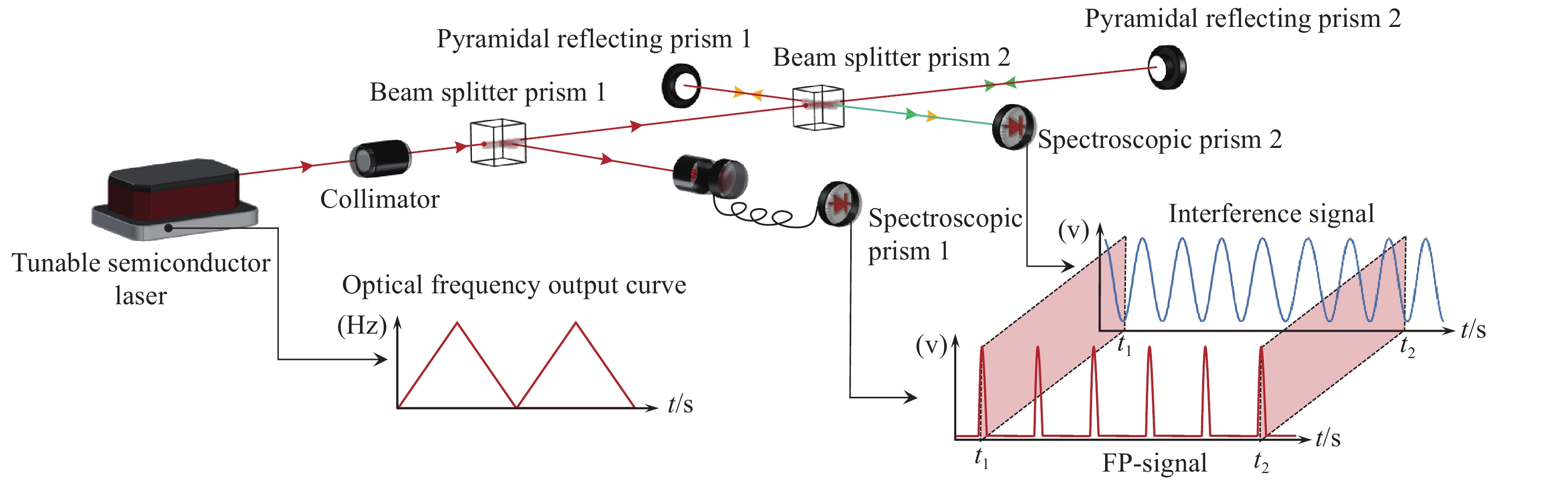
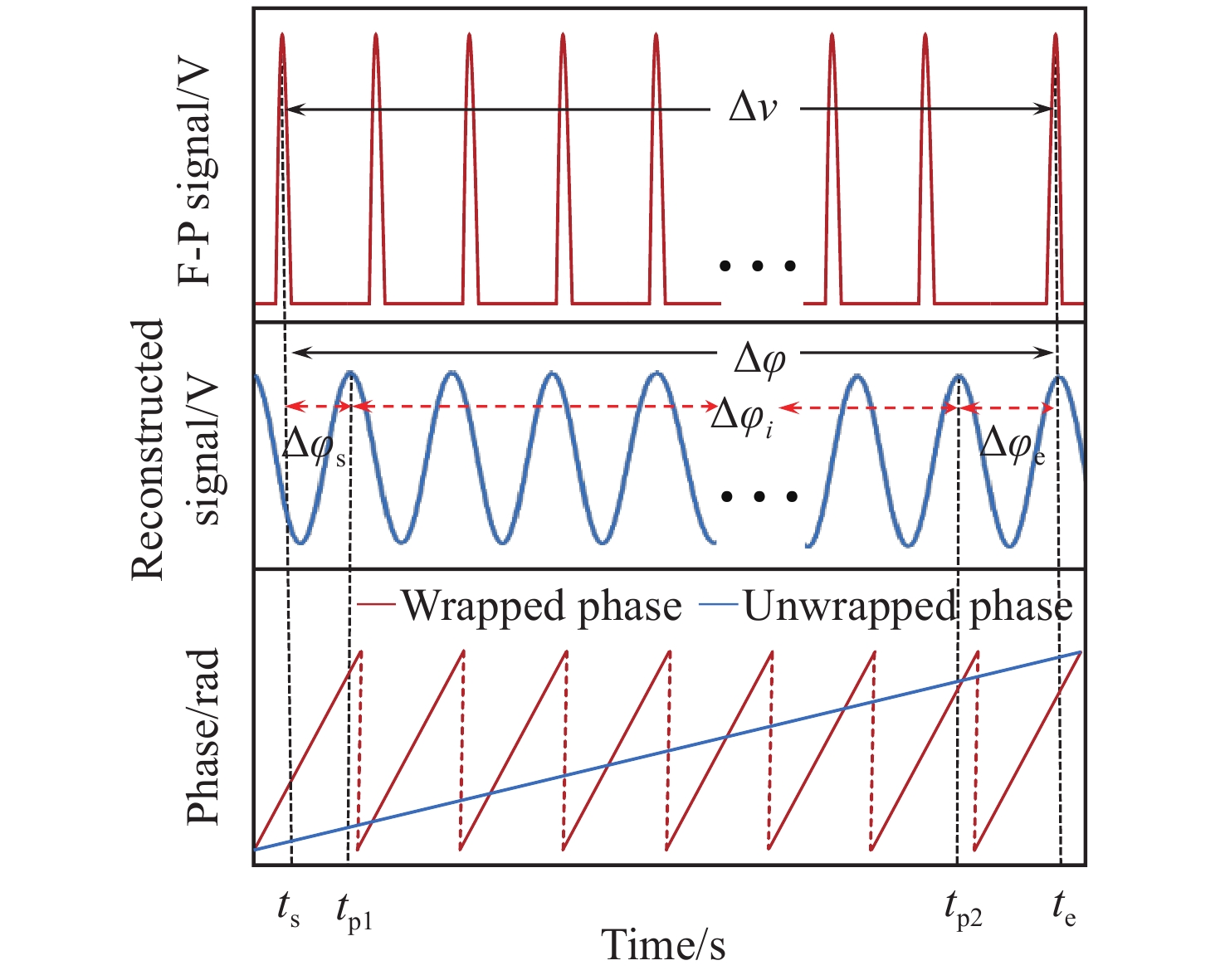
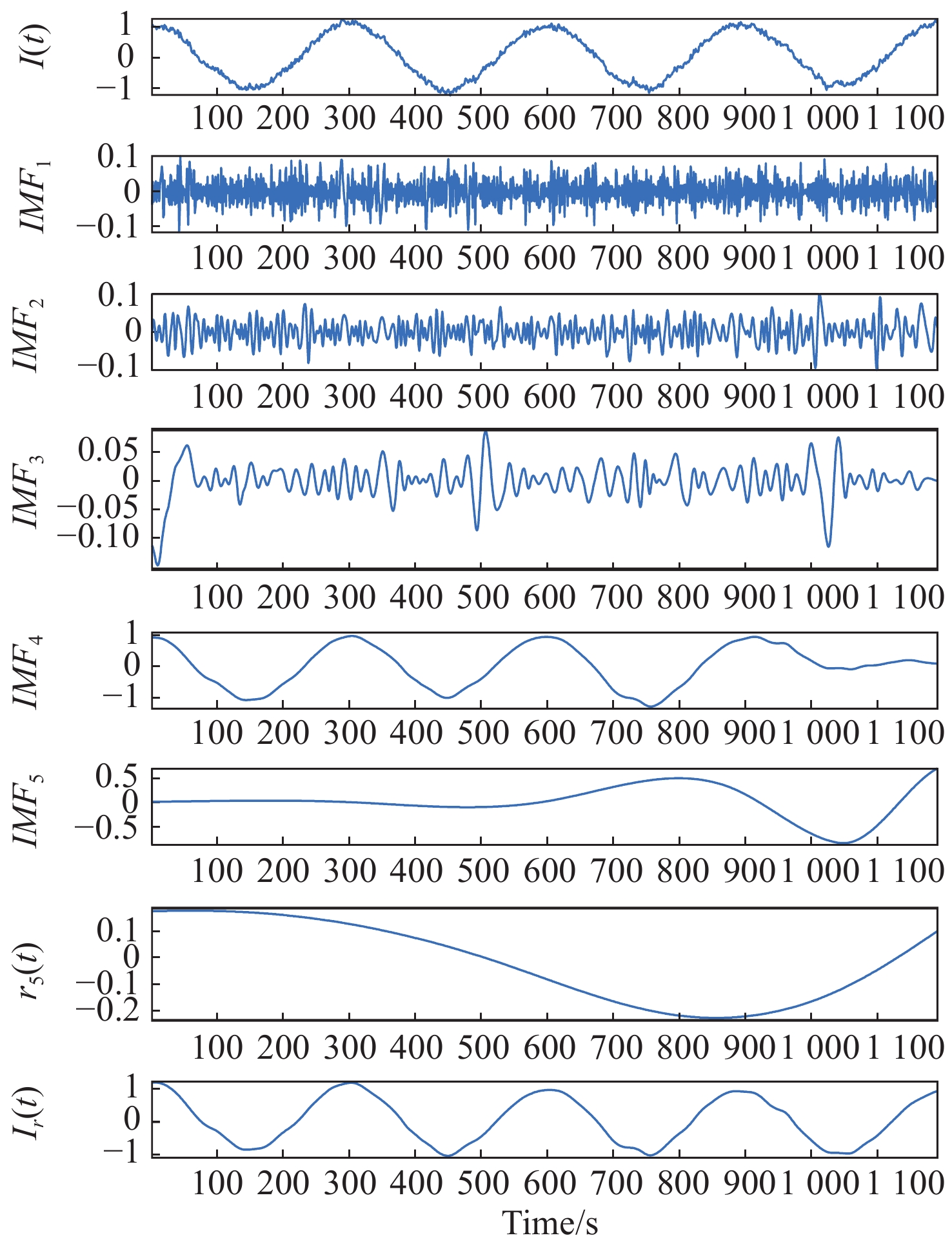
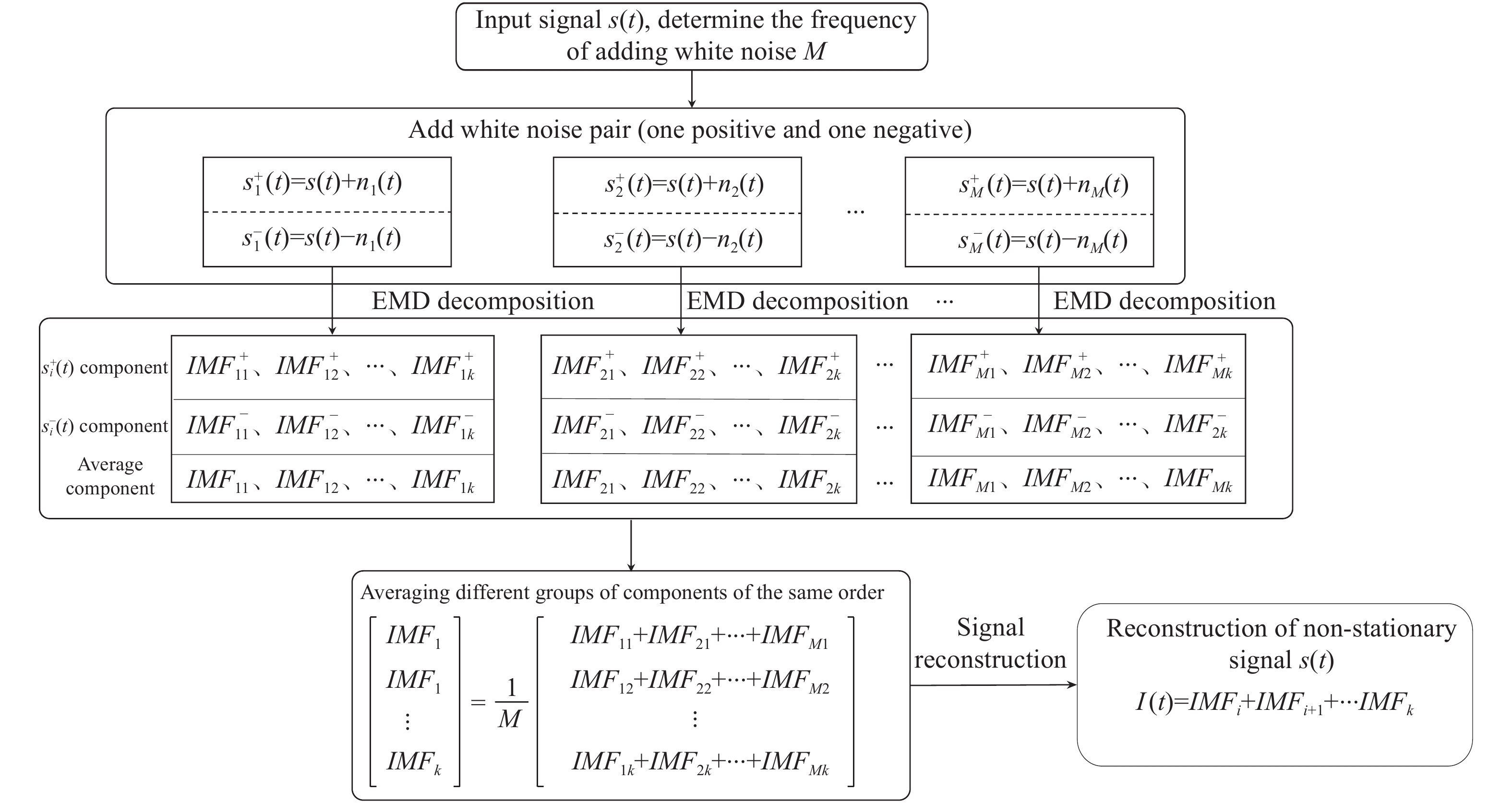
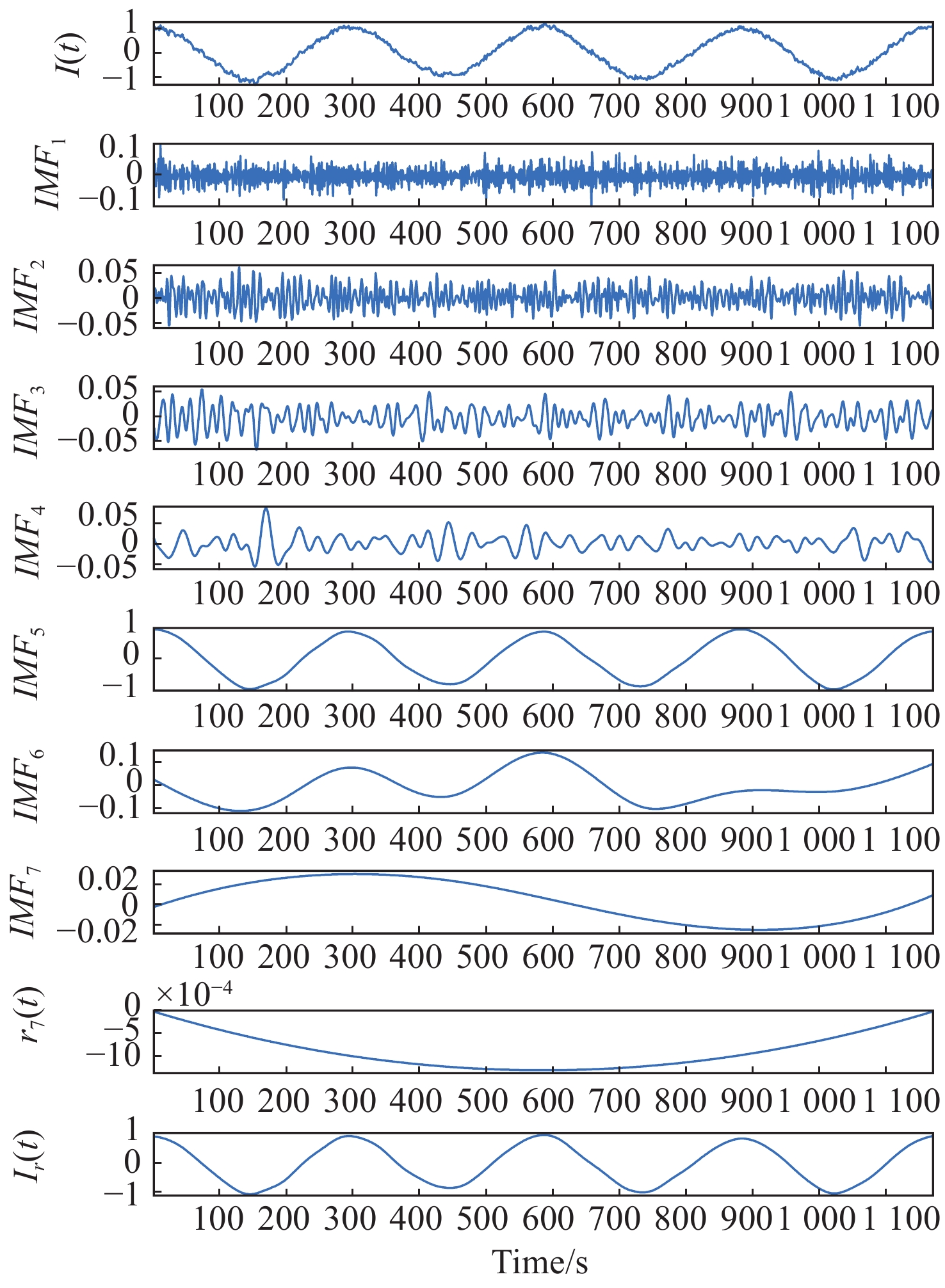
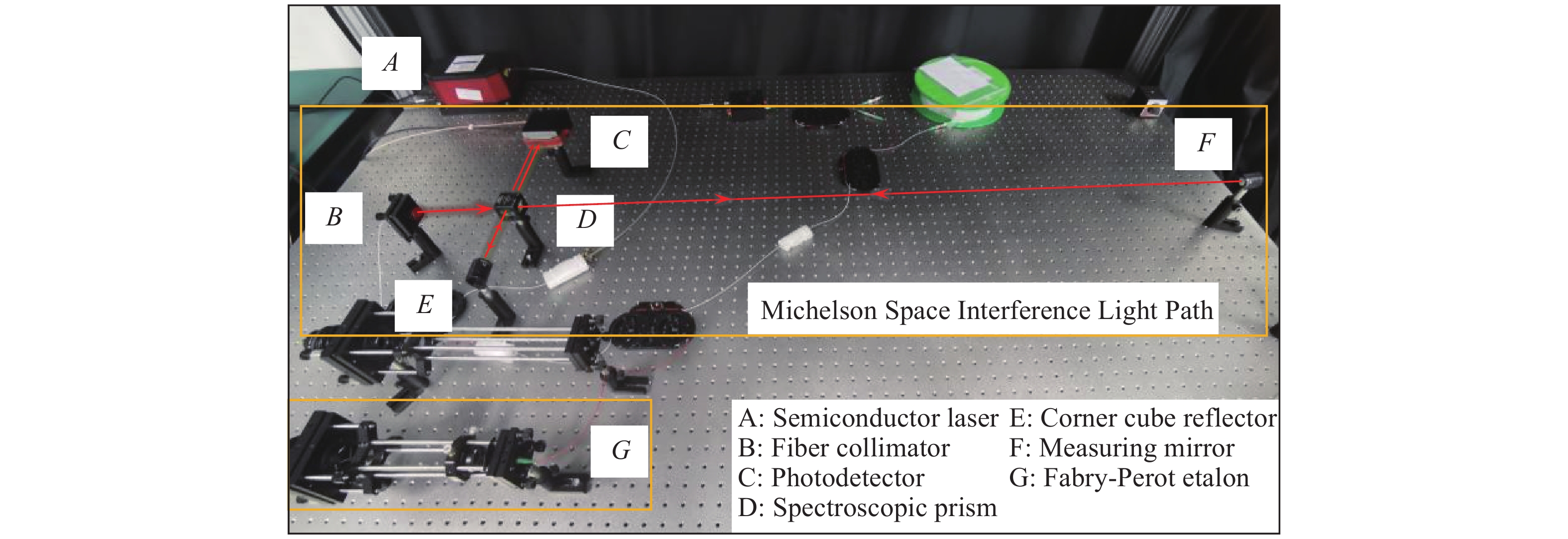
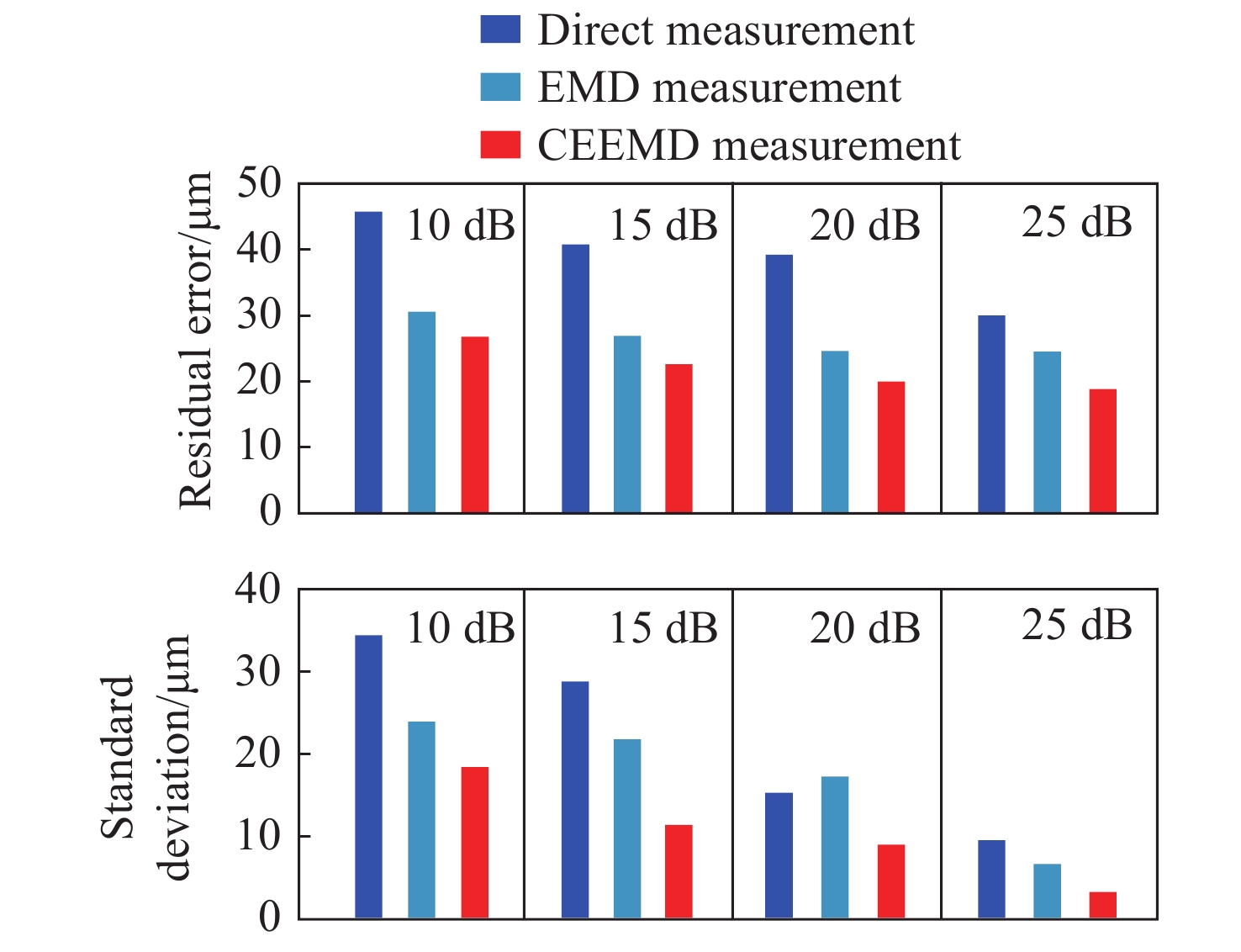
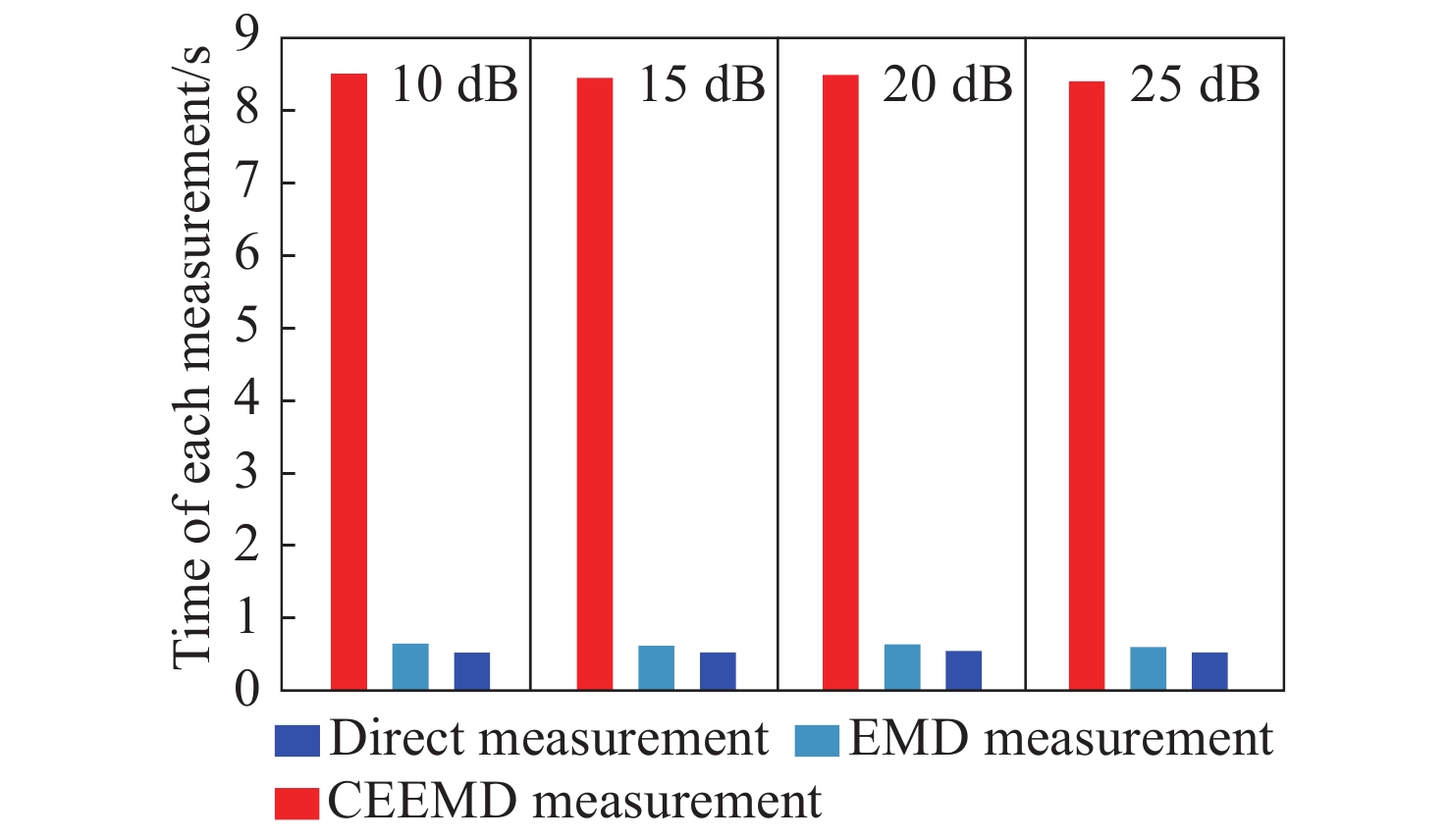
光频扫描非线性会影响光频扫描干涉(FSI)信号的相位提取精度,进而降低扫频干涉测距精度。针对这一问题,本文提出了一种基于互补集合经验模态分解结合希尔伯特变换(CEEMD-HT)算法的干涉信号相位提取方法。在CEEMD-HT算法进行理论推导和仿真分析的基础上,通过仿真验证了该算法对非平稳扫频干涉信号相位求解的有效性。进一步采用FSI实验系统中的真实输出光频率作为仿真条件进行了仿真实验,仿真结果表明CEEMD-HT算法对干涉信号相位的求解精度以及FSI测距精度都有显著的改善。最后,通过FSI测距系统的测距实验对所提出的干涉信号相位提取方法进行验证。结果表明:在2 m自由空间测量范围内,基于CEEMD-HT算法的重复测距精度为2.79 μm,相较于EMD-HT和直接测量法分别提高了5.19倍和8.28倍。



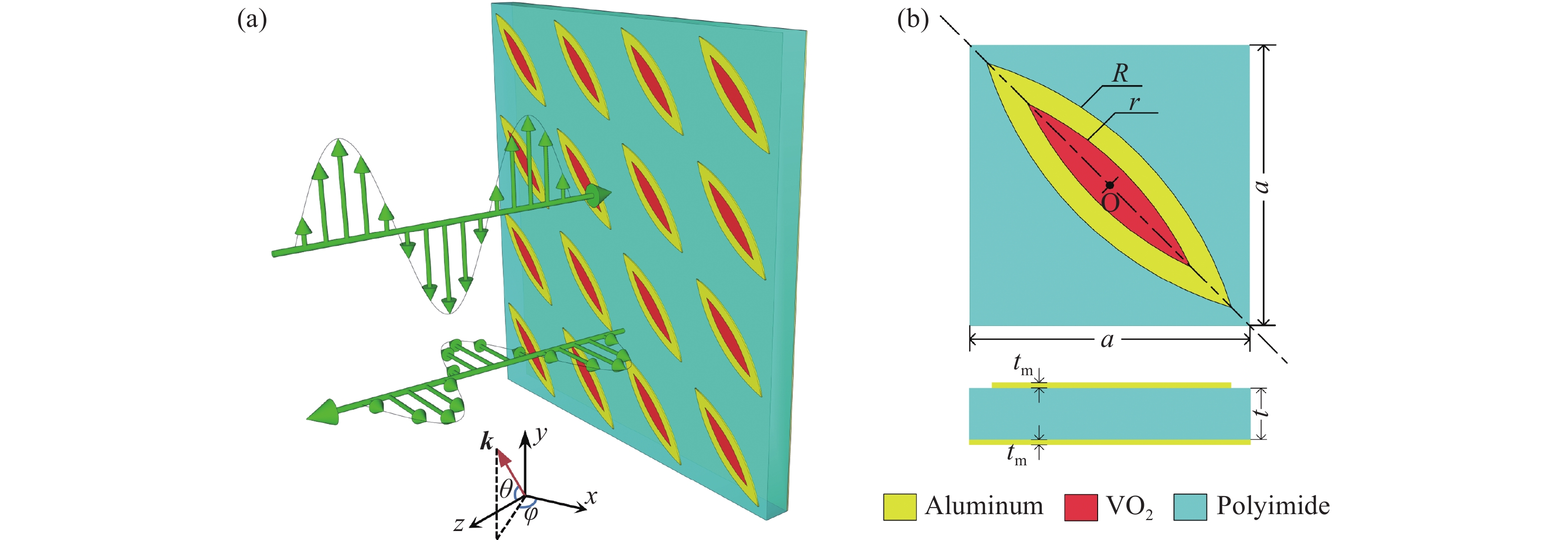
基于二氧化钒(vanadium dioxide, VO2)的相变原理,提出了一种“树叶型”复合超构材料,能够实现带宽可调谐的半波片功能。VO2薄膜为绝缘态时,复合超构材料可以看作是空芯“树叶型”金属结构,能够实现双频带的半波片功能。在1.01~1.17 THz和1.47~1.95 THz 频带范围内能够将


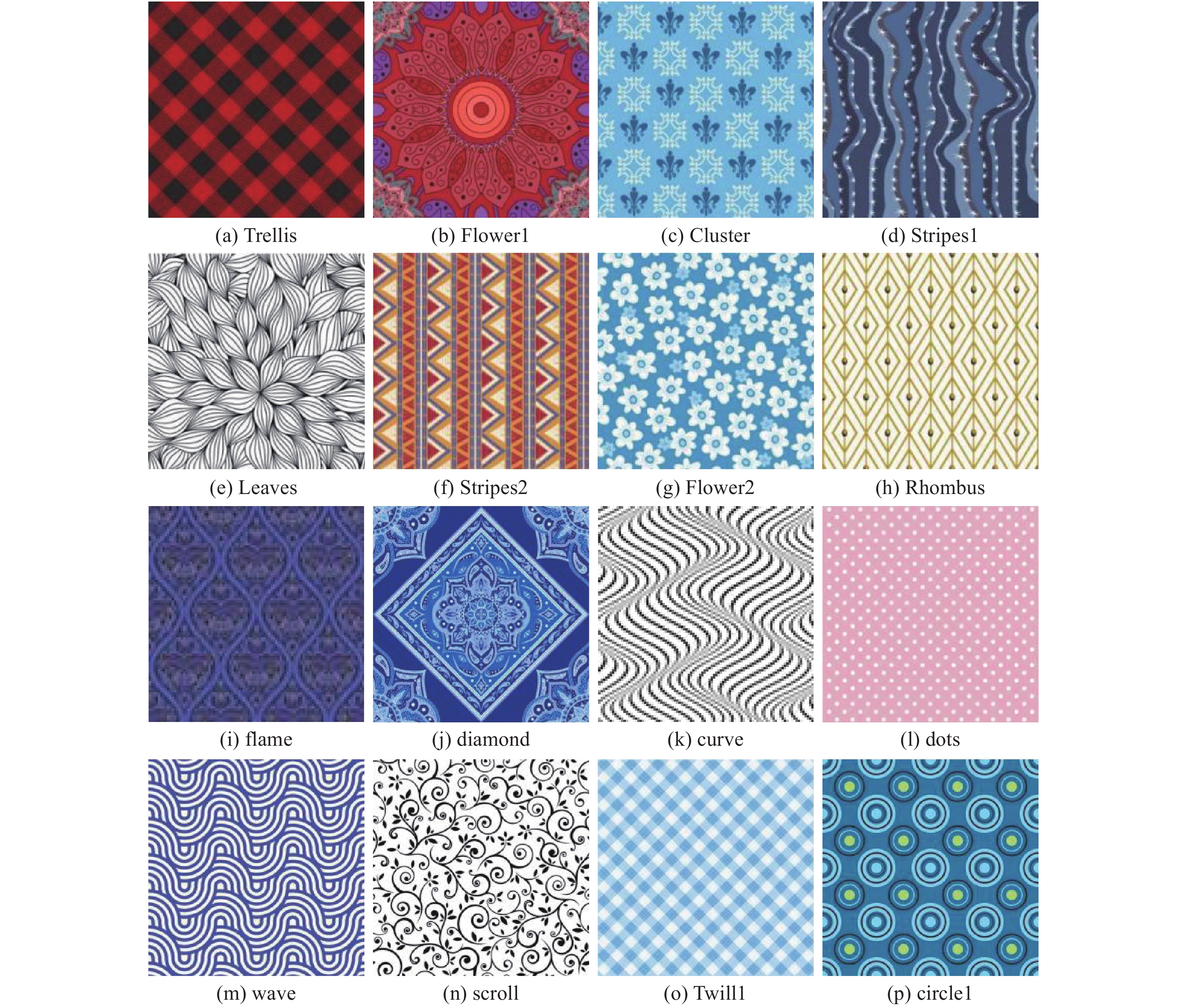
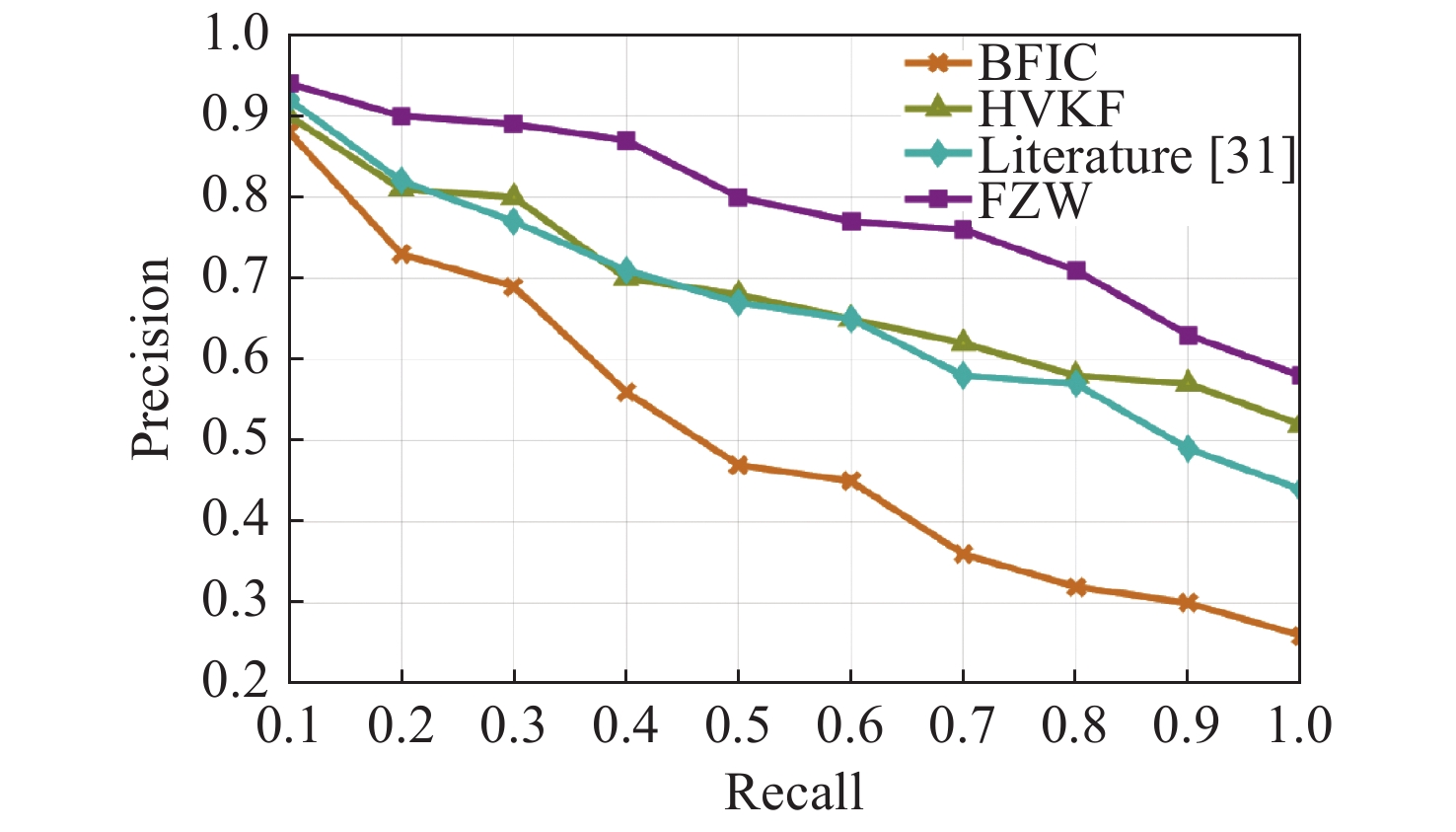
为帮助纺织企业的工作人员快速、准确地从数据库中检索出与织物图像相同或相似的图像,提出了一种小波变换下基于分形编码和 Zernike 矩的织物图像检索算法。首先,利用小波变换获得低频分量,对变换后的低频子图进行分形编码,得到编码参数。然后,计算低频子图像的 Zernike 矩。将小波变换下的分形编码参数和Zernike 矩相结合作为织物图像检索的特征量。相比于单特征检索方法,该算法克服了精度低、耗时长的问题。与基本分形算法(BFIC)、联合正交分形参数和改进的 Hu 不变矩算法(HVKF)以及稀疏分形图像压缩算法(SFIC)相比,该算法确保了重建图像的质量和较低的编码时间。实验结果表明,织物图像检索的平均精度和平均召回率均高于现有的检索方法。



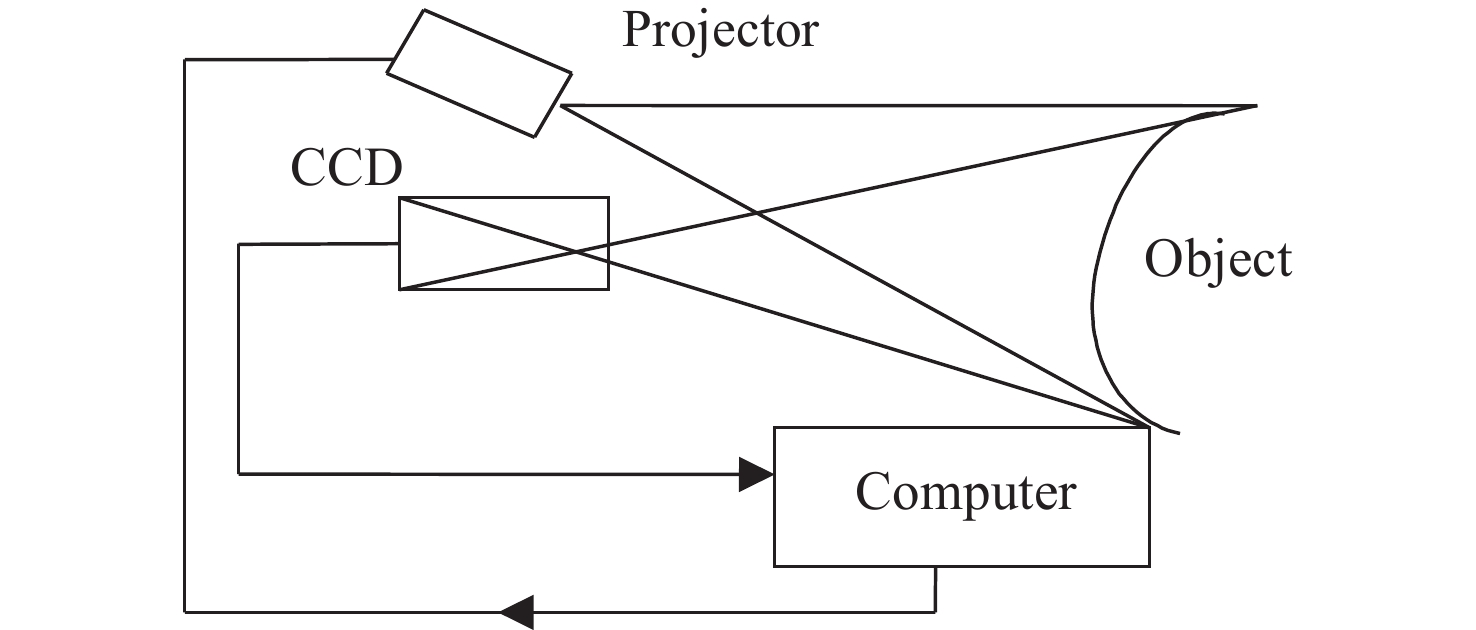
为了在非线性测量系统中获得更好的相位测量结果,提出了一种在几乎消除非线性影响后使用双频光栅投影的相位测量方法。首先,讨论了相位测量系统的非线性效应,分析了频域中存在高阶频谱成份的基本原因,给出了减小非线性效应并分离基频信息的基本方法。然后,在减小系统非线性效应影响的基础上,分析了使用双频光栅投影测量被测物体条纹图像的相位基本原理。为验证所提出的相位测量方法的有效性,进行了计算机仿真和实际实验,获得了良好结果。在仿真实验中,该方法的误差值为有非线性影响方法的27.97%,为几乎没有非线性影响方法的52.51%;在实际实验中,该方法的相位恢复效果最好。表明采用本文方法所测量的相位效果好,误差较小。





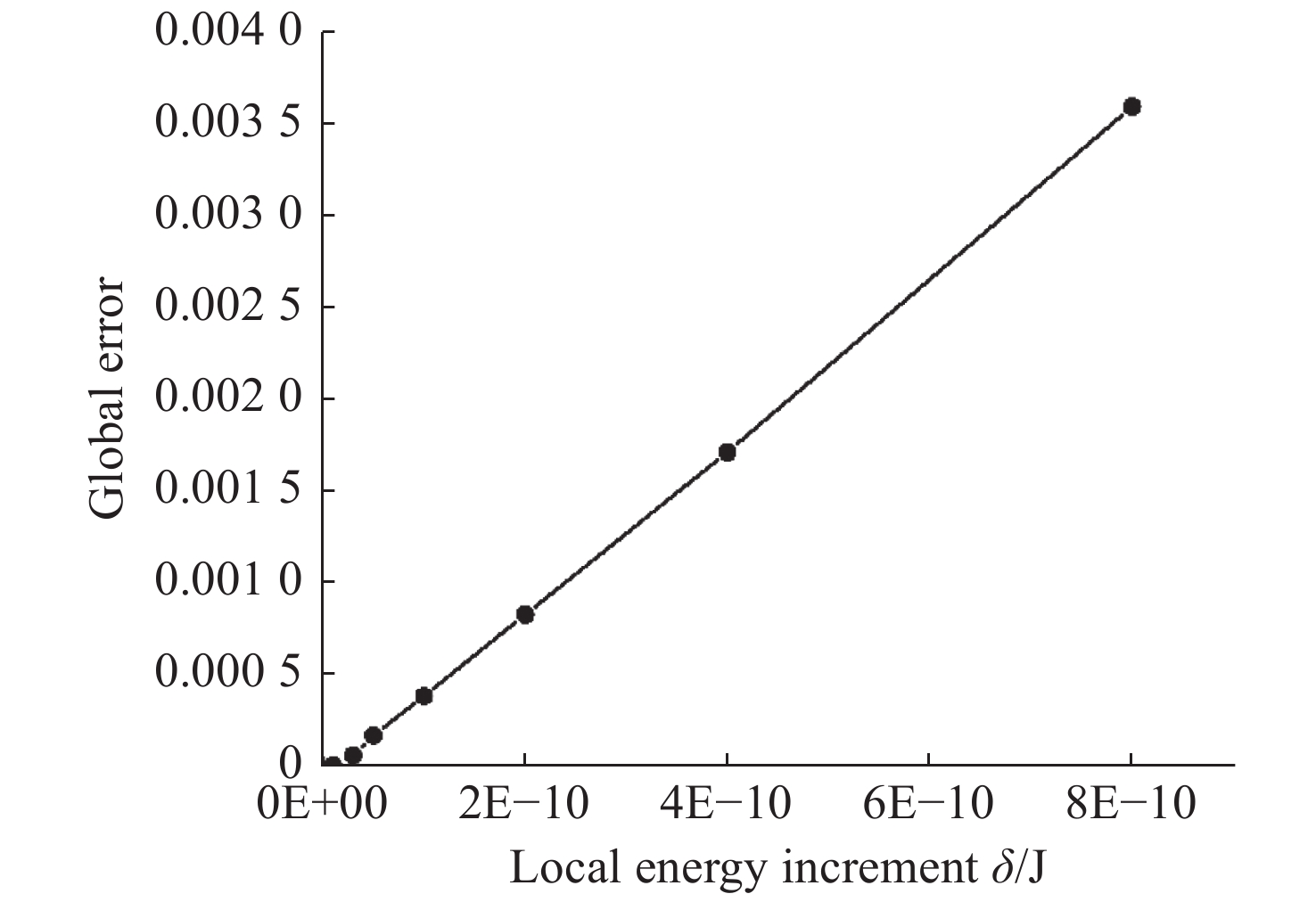
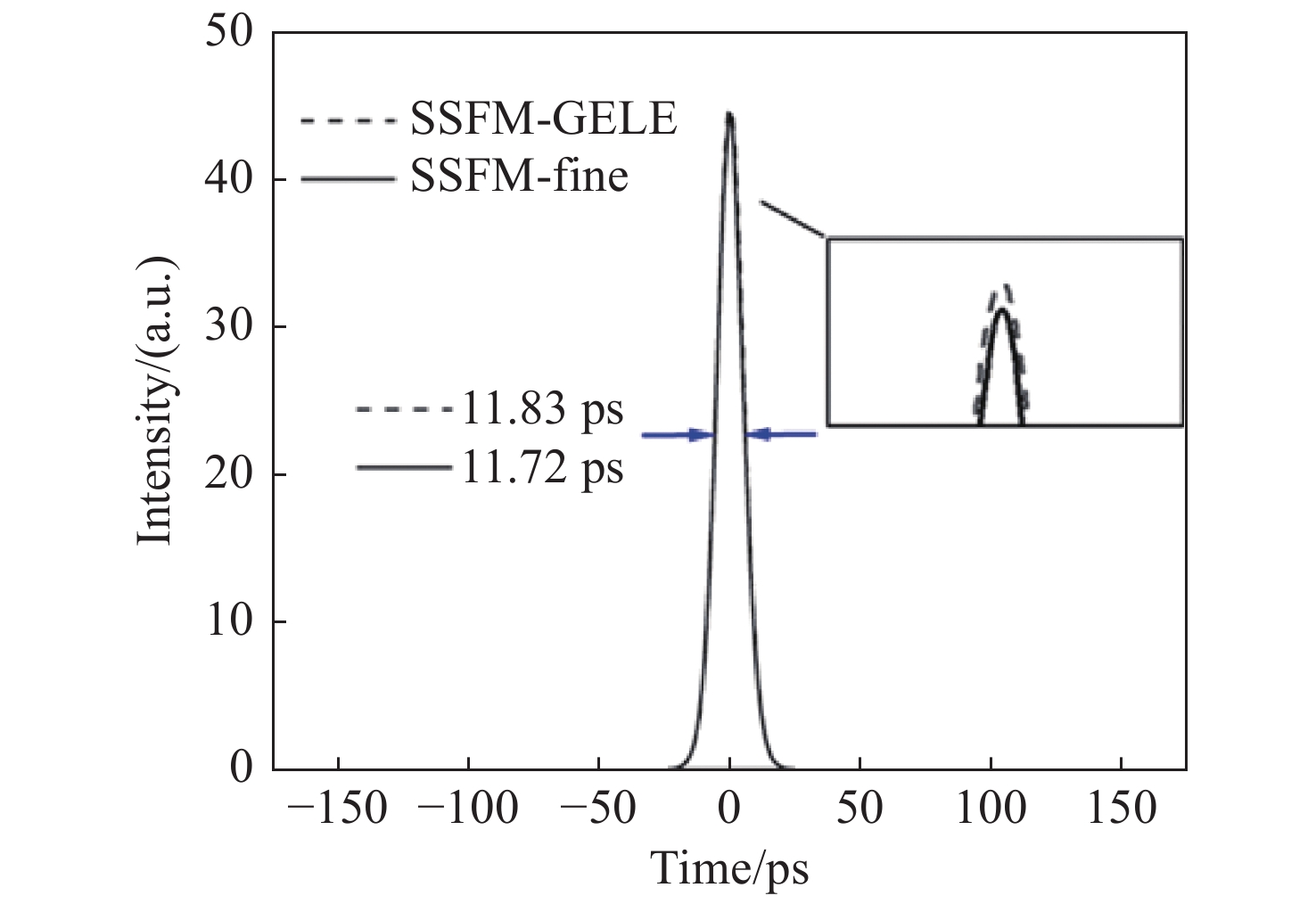
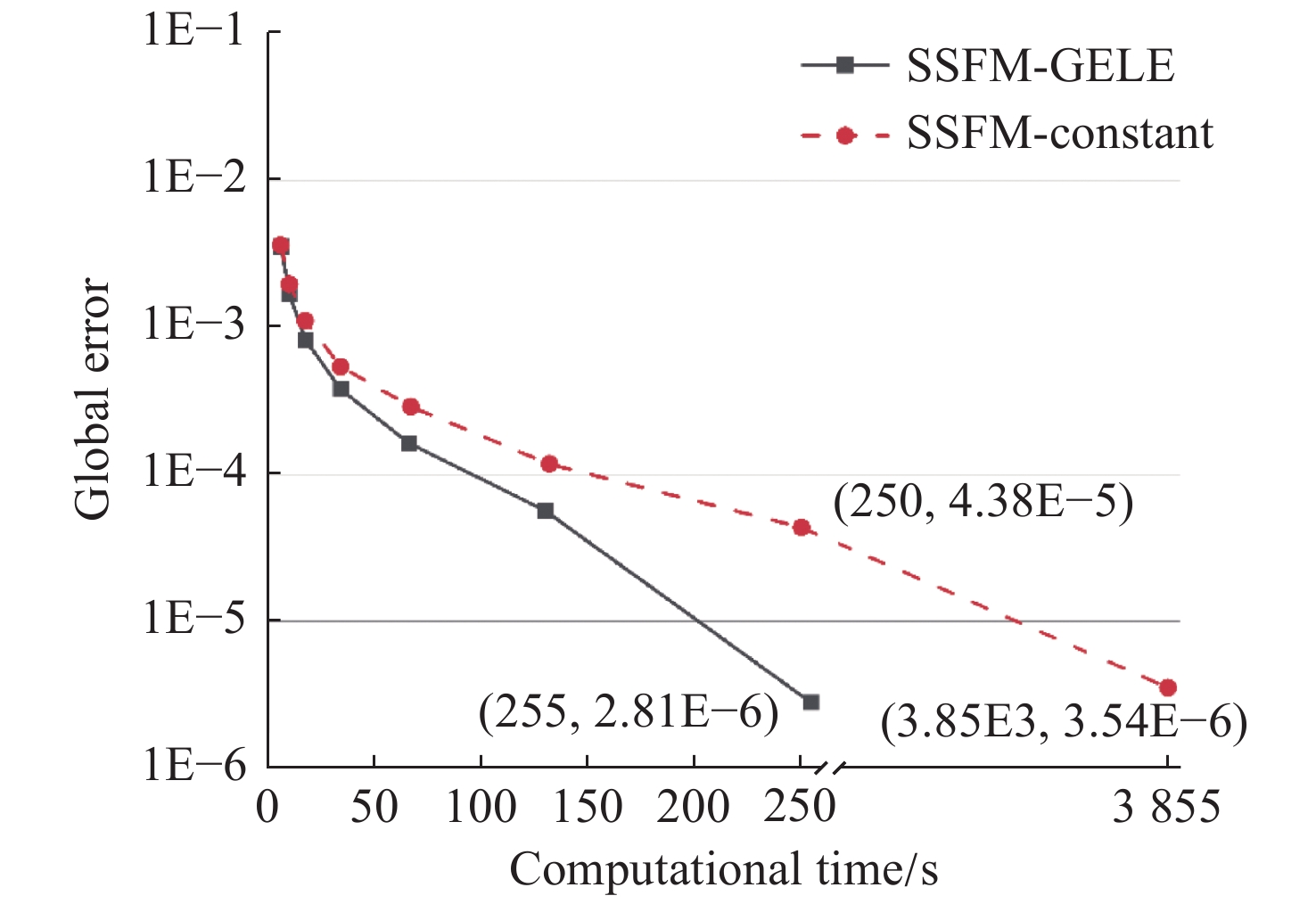
本文提出了一种提高被动锁模光纤激光器计算效率的方法,该方法由对称分步傅立叶方法(SSFM)和全局误差局部能量(GELE)方法组成。该方法可将与全局误差相关的局部能量增量限制在一定范围内来控制步长。该方法具有自动步长调整机制。达到同程度的计算精度,本文方法的计算时间为255 s,而小的恒定步长SSFM方法需要3855 s。这表明本文方法可以将计算效率提高10余倍。本文方法还可以通过RK4IP、Adams、预测-校正等高阶算法进行扩展,以提高精度。